<4D F736F F F696E74202D204443B8F0C5CDC1A6BEEE5FBCADBAB8B8F0C5CD5F E BC8A3C8AF20B8F0B5E55D>
|
|
|
- 선아 태
- 5 years ago
- Views:
Transcription
1 제어로봇공학과이성렬 1
2 차례 Week Contents Detils Objectives 3 서보모터기술 1. 서보모터의종류 2. DC 모터의원리 3. DC모터의정적특성 4. DC모터의동적특성 5. DC모터의에너지변환 DC 모터의원리와정적및동적특성모델에대하여자세히얘기할수있어야한다. 2
3 Introduction Digitl Control System PWM Genertor Motor Driver Plnt (Servo Motor+Lod) Control Commnd PID controller Encoder Counter /Intervl Counter Encoder MicroController Sensor 3
4 Servo Motor 의종류 Servo Motor Servo : slve, servnt Servo Motor 주어진속도나위치명령에신속하고정확하게추종하도록설계된모터. 일반적으로토크가크고관성모멘트가작아야함. 동력원에따른서보 ( 제어 ) 시스템의종류 : 전기식, 공압식, 유압식. 시스템의용량으로구분하면극소용량은공압식, 소 중용량은전기식, 대용량에는유압식서보가적합. 전력소자기술, 제어기술, 센서기술, 제어용 IC기술의발달로전기식서보시스템이유압서보, 공기압서보에비하여뛰어난성능을보임. 서보모터분류 : DC 서보모터와 AC 서보모터 4
5 Servo Motor 의종류 Servo Motor 의분류 전기자권선 ( 감은전선 ) 에공급되는전력이교류인가직류인가에의해분류. 기계적인브러시와정류자의유무에의한분류 5


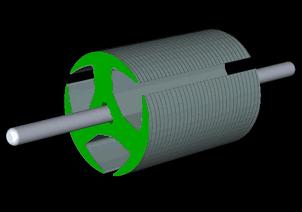
6 Servo Motor 의종류 DC Servo Motor Structure DC Motor 6

7 Servo Motor 의종류 AC Servo Motor Structure AC Synchronous Motor 7
8 Servo Motor 의종류 Servo Motor 동작원리 DC Motor AC Synchronous Motor 8
9 Servo Motor 의종류 구분 동기모터형 AC 서보모터 유도모터형 DC 서보모터 장점 브러시리스, 보수용이 브러시리스로서보수용이 기동토크가크다. 내환경성이용이 내환경성이용이 소형, 대토크 고신뢰성 영구자석을사용하지않는다. 효율이높다. 고속, 고토크이용가능 고속, 고토크이용가능 제어성이양호 고정자에권선이있으므로방열이유리 보통고정자에권선이있으므로방열상유리 속도제어범위가넓다. 회전을위한검출기가불필요. 단점 제어시스템이복잡하고고가 시스템이복잡하고고가 전기적시정수가크다. 브러시마모의기계손실이크다. 전기적시정수가크다. 회전을위한검출기가필요 출력 2~3KW 이하 현재실용예가적다. 브러시수명에의한보수가필요. 브러시소음. 최대출력은 2~3KW 사용환경에제한이있다. 9

10 DC Motor 의원리 DC Motor 정의 10
11 DC Motor 의원리 DC Motor 정의 11
 : 모터에서전류가흐르는부분 Brush : 전원으로부터 Armture에전류를공급하는부분. 한쌍으로구성되어전원의 +,-단자에연결되어있음. Commuttor : Rotor에고정되어 Brush와접촉하는부분. 보통여러조각으로나누어져있음.")
12 DC Motor 의원리 DC Motor 의구조 Rotor( 회전자 ) : 모터에서회전하는부분 Sttor( 고정자 ) : 모터에서고정되어있는부분 Field System : 모터에서 mgnetic flux를제공하는부분 (iron housing nd permnent mgnet) Armture( 전기자 ) : 모터에서전류가흐르는부분 Brush : 전원으로부터 Armture에전류를공급하는부분. 한쌍으로구성되어전원의 +,-단자에연결되어있음. Commuttor : Rotor에고정되어 Brush와접촉하는부분. 보통여러조각으로나누어져있음. 애니메이션 : Mbuchi Motor 12




13 DC Motor 의원리 DC Motor 의구조 13
 R : distnce from the center to conductor(m) 14")
14 DC Motor 의원리 플레밍의왼손법칙과토크발생 Torque production T : torque(nm) F : force(n) R : distnce from the center to conductor(m) 14
15 DC Motor 의원리 토크상수 (Torque Constnt, K t ) 플레밍의왼손법칙으로부터 T=2BLRI 이고여기서 B, L, R 은모터를생산한후에는고정된값이다. 따라서 K t =2BLR 을모터의고유한특성을나타내는토크상수라고부른다. 즉, 모터가생성하는토크는전류에비례한다. T = K t I T : Torque(Nm) I : Current(A) K t : Torque constnt(nm/a) DC Voltge I K T Speed t Electricl Dynmics Mechnicl Dynmics 15
 B : mgnetic flux density(t) E : bck electro motive force(volt) R : distnce from the center to conductor(m) 16")
16 DC Motor 의원리 플레밍의오른손법칙과역기전력 (Bck electro motive force) 발생 v E =BLv E =2RBLω v : velocity of conductor(m/s) ω: rottionl velocity of rotor L : length of conductor(m) B : mgnetic flux density(t) E : bck electro motive force(volt) R : distnce from the center to conductor(m) 16
17 DC Motor 의원리 역기전력상수 (Bck electro motive force constnt, K e ) 플레밍의오른손법칙으로부터 E=2RBLw 이고여기서 R, B, L은모터를생산한후에는고정된값이다. 따라서 K e =2BLR 을모터의고유한특성을나타내는역기전력상수라고부른다. 즉, 모터가생성하는역기전력은모터의회전속도에비례한다. 역기전력이발생하는원리는발전기의원리이다. 모터는전동기로서전기에너지를기계에너지로전환하면서동시에발전기로 서역기전력을발생시킨다. 역기전력의단위는전압이고입력전압과극성이반대이다. E = K e w E : bck electro motive force(v) w : ngulr velocity(rd/s) K e : bck emf constnt(vs/rd) 17
18 DC Motor 의원리 역기전력상수 (K e ) 와토크상수 (K t ) 와의관계 실제 DC 모터구조에대해서도두상수가같음을보일수있다. K e = K t 실제모터의효율이 100% 라면모터에가해진입력전압과이로부터발생하는역기전력의크기는같다. 따라서이상적인상태에서모터전류는 0이다. 실제로는전기및기계적인손실이발생하여역기전력이입력전압보다작기때문에무부하전류가 0이아니다 18
19 DC Motor 의정적특성 DC 모터의정적 (sttic) 등가회로 입력전압으로직류전압 V를모터에가한후충분한시간이흐른후의등가회로 이회로로부터DC모터의여러가지정적특성값들을정의할수있다. V R I I ( V T K t I K K e e ) K R t V R K e V : input voltge of motor R : terminl resistnce of motor I : rmture current E : bck e.m.f K e : bck e.m.f constnt Ω : ngulr velocity of rotor 19
20 DC Motor 의정적특성 DC 모터특성곡선 가로축 : Torque( 토크 ) 세로축 : Speed(N, blue), Current(I, red), Output Power(P o, yellow), Power Efficiency(η, green) (N 0 ) (I 0 ) (T) (I S ) (T s ) No lod Stte 부하없이회전하는상태 N 0 : no lod speed I 0 : no lod current Stll Stte 전원입력되고정지된상태 T s : stll torque I s : stll current N 1/T I T P o = N T P i = V I η = P o /P i
 모터토크의최대값 I s (stll current) 모터전류의최대값 (T s ) (T)")
21 DC Motor 의정적특성 DC 모터특성곡선의예 N 0 (no lod speed) 모터속도의최대값 I 0 (no lod current) 모터전류의최소값 T s (stll torque) 모터토크의최대값 I s (stll current) 모터전류의최대값 (T s ) (T) 21
22 DC Motor 의동적특성 DC모터의동적 (dynmic) 등가회로 모터의입력이시간에따라변할때, 즉동적일때등가회로 동적특성을고려할때는 L 과 J m 성분이관성역할을하므로등가회로에서반드시고려해야한다. Electricl Dynmics of DC Motor Mechnicl Dynmics of DC Motor K v t i i R J i m L d dt m di dt B m K m e m f m 22
23 DC Motor 의에너지변환 DC모터의에너지변환 DC모터 : 전기에너지를기계에너지로변환하는장치 모든전기에너지가기계에너지로변환되지는않는다. 즉, DC모터에서에너지손실이발생한다. 실제로는저항뿐만아니라다양한손실성분이존재한다. VI 2 ( E RI ) I EI RI VI : 모터에공급된총 electricl power EI : mechnicl output power R I 2 : 저항에서소모된주울열 (Joule Het) 23
24 요약 요약 DC모터와 AC모터의구조와원리의차이를이해해야한다. DC모터의내부구조와용어를숙지할것. DC모터의원리, 즉, 토크발생원리와역기전력의원리를이해해야한다. DC모터의정적특성값과동적특성값의물리적의미를파악할것. 24
25 과제 D&J WITH 사의 DC Motor 제품인 RB-35GM Encoder 21TYPE(12V) 에대하여다음을조사하시오. 모터특성곡선, 정격전압, no lod speed, no lod current, stll current, stll torque, 엔코더사양 기한 : 다음수업시작직전까지 25
26 참고문헌 1. Permnent Mgnet nd Brushless DC Motors, T. Kenjo, Sogo Electronics Publishing Compny, DC모터의원리, 26
TDB 3000 Series Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO
 Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO DRIVER 의장점을일체화저발열및토크특성우수 TDB 000 V 48 바이폴라 (Bipolar) Closed-Loop 스텝모터드라이버
Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO DRIVER 의장점을일체화저발열및토크특성우수 TDB 000 V 48 바이폴라 (Bipolar) Closed-Loop 스텝모터드라이버
À̵¿·Îº¿ÀÇ ÀÎÅͳݱâ¹Ý ¿ø°ÝÁ¦¾î½Ã ½Ã°£Áö¿¬¿¡_.hwp
 l Y ( X g, Y g ) r v L v v R L θ X ( X c, Yc) W (a) (b) DC 12V 9A Battery 전원부 DC-DC Converter +12V, -12V DC-DC Converter 5V DC-AC Inverter AC 220V DC-DC Converter 3.3V Motor Driver 80196kc,PWM Main
l Y ( X g, Y g ) r v L v v R L θ X ( X c, Yc) W (a) (b) DC 12V 9A Battery 전원부 DC-DC Converter +12V, -12V DC-DC Converter 5V DC-AC Inverter AC 220V DC-DC Converter 3.3V Motor Driver 80196kc,PWM Main

실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
 그림 1 DC 마이크로그리드의구성 Fig. 1 Configuration of DC Micro-grid 그림 2 전력흐름도 Fig. 2 Power Flow of each component 그림 3 전력관리개념 Fig. 3 Concept of Energ Management Unit 1 Unit 2 Output Impedence z1 Output Impedence
그림 1 DC 마이크로그리드의구성 Fig. 1 Configuration of DC Micro-grid 그림 2 전력흐름도 Fig. 2 Power Flow of each component 그림 3 전력관리개념 Fig. 3 Concept of Energ Management Unit 1 Unit 2 Output Impedence z1 Output Impedence

PowerPoint Presentation
 모터의기초 목차 1. 모터의발명자 2. 변압기 3. 플레밍의왼손법칙 4. Voice Coil 모터 5. DC 모터의구동원리 6. 교류정류자모터 7. Step 모터 8. 아르고의원리 9. 교류와회전자계 10. 모터의종류 11. 광학식로터리인코더 12. PWM 제어 13. 모터의전기적사양 (BLDC의예 ) 모터의발명자 영국의물리학자마이켈패러데이 (Michael
모터의기초 목차 1. 모터의발명자 2. 변압기 3. 플레밍의왼손법칙 4. Voice Coil 모터 5. DC 모터의구동원리 6. 교류정류자모터 7. Step 모터 8. 아르고의원리 9. 교류와회전자계 10. 모터의종류 11. 광학식로터리인코더 12. PWM 제어 13. 모터의전기적사양 (BLDC의예 ) 모터의발명자 영국의물리학자마이켈패러데이 (Michael
Coaxial shaft L series 특징 Features L series ABLE REDUCER 조용한소음 헬리컬기어채용으로저진동, 저소음실현 Quiet operation Helical gears contribute to reduce vibration and no
 For servo motor ABLE REDUCER 에이블감속기 L Series 61 Coaxial shaft L series 특징 Features L series ABLE REDUCER 조용한소음 헬리컬기어채용으로저진동, 저소음실현 Quiet operation Helical gears contribute to reduce vibration and noise.
For servo motor ABLE REDUCER 에이블감속기 L Series 61 Coaxial shaft L series 특징 Features L series ABLE REDUCER 조용한소음 헬리컬기어채용으로저진동, 저소음실현 Quiet operation Helical gears contribute to reduce vibration and noise.
intro
 Contents Introduction Contents Contents / Contents / Contents / Contents / 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57
Contents Introduction Contents Contents / Contents / Contents / Contents / 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57
サーボモータ用高精度減速機_AFC_Aシリーズ
 Accurate Reducer High-Precision Gear for Servo-motors CONTENTS P. 2 P. A1 P. B1 P. T1 P. T23 1 유성감속기 APG type 100W-3000W 3arcmin 1arcmin 형번12 형번1 형번2 형번22 기종구성 용량 정밀도 3 10 100W 20 형번12 2 3분 1분 형번22 9
Accurate Reducer High-Precision Gear for Servo-motors CONTENTS P. 2 P. A1 P. B1 P. T1 P. T23 1 유성감속기 APG type 100W-3000W 3arcmin 1arcmin 형번12 형번1 형번2 형번22 기종구성 용량 정밀도 3 10 100W 20 형번12 2 3분 1분 형번22 9
Microsoft PowerPoint - 27-Circuits.ppt
 27. 회로 (circuits) 기전력 - Electromotive fore (emf) Kirchhoff 법칙 Loop ule (Energy is conserved) Junction ule (Chrge is conserved) ΔV closed i 저항연결 (esistors in Series & Prllel) 지난시간에 전류밀도 (J) 전기저항 (resistnce)
27. 회로 (circuits) 기전력 - Electromotive fore (emf) Kirchhoff 법칙 Loop ule (Energy is conserved) Junction ule (Chrge is conserved) ΔV closed i 저항연결 (esistors in Series & Prllel) 지난시간에 전류밀도 (J) 전기저항 (resistnce)
제목을 입력하십시오
 포워드, 플라이백컨버터 Prof. ByoungKuk ee, Ph.D. Energy echaronics ab. chool of Informaion and Communicaion Eng. ungkyunkwan Universiy Tel: 823299458 Fax: 823299462 hp://seml.skku.ac.kr E: bkleeskku@skku.edu Forward
포워드, 플라이백컨버터 Prof. ByoungKuk ee, Ph.D. Energy echaronics ab. chool of Informaion and Communicaion Eng. ungkyunkwan Universiy Tel: 823299458 Fax: 823299462 hp://seml.skku.ac.kr E: bkleeskku@skku.edu Forward
REVIEW CHART
 Rev.6, 29. June 2015 보호및절연협조 2015. 06. 29 한국철도시설공단 REVIEW CHART 1 2 Ω 3 4 5 6 단락보호과전류방식 단락보호 지락보호비율차동방식 단락보호과전류방식 지락보호지락과전류 7 8 9 10 I inrush FLA 배at sec 11 12 I pickup Slope P I n 여기에서 I n 변류기 차정격전류
Rev.6, 29. June 2015 보호및절연협조 2015. 06. 29 한국철도시설공단 REVIEW CHART 1 2 Ω 3 4 5 6 단락보호과전류방식 단락보호 지락보호비율차동방식 단락보호과전류방식 지락보호지락과전류 7 8 9 10 I inrush FLA 배at sec 11 12 I pickup Slope P I n 여기에서 I n 변류기 차정격전류
PowerPoint 프레젠테이션
 RecurDyn 의 Co-simulation 와 하드웨어인터페이스적용 2016.11.16 User day 김진수, 서준원 펑션베이솔루션그룹 Index 1. Co-simulation 이란? Interface 방식 Co-simulation 개념 2. RecurDyn 과 Co-simulation 이가능한분야별소프트웨어 Dynamics과 Control 1) RecurDyn
RecurDyn 의 Co-simulation 와 하드웨어인터페이스적용 2016.11.16 User day 김진수, 서준원 펑션베이솔루션그룹 Index 1. Co-simulation 이란? Interface 방식 Co-simulation 개념 2. RecurDyn 과 Co-simulation 이가능한분야별소프트웨어 Dynamics과 Control 1) RecurDyn
1_12-53(김동희)_.hwp
_.hwp") 본논문은 2012년전력전자학술대회우수추천논문임 Cascaded BuckBoost 컨버터를 이용한 태양광 모듈 집적형 저전압 배터리 충전 장치 개발 472 강압이 가능한 토폴로지를 이용한 연구도 진행되었지만 제어 알고리즘의 용의성과 구조의 간단함 때문에 BuckBoost 컨버터 또는 Sepic 컨버터를 이용하여 연구 가 진행되었다[10][13]. 태양광 발전
본논문은 2012년전력전자학술대회우수추천논문임 Cascaded BuckBoost 컨버터를 이용한 태양광 모듈 집적형 저전압 배터리 충전 장치 개발 472 강압이 가능한 토폴로지를 이용한 연구도 진행되었지만 제어 알고리즘의 용의성과 구조의 간단함 때문에 BuckBoost 컨버터 또는 Sepic 컨버터를 이용하여 연구 가 진행되었다[10][13]. 태양광 발전
KMC.xlsm
 제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
6_5상 스테핑 모터_ _OK.indd
 모델구성 적용모델 : 표준축형,, A 8K M 5 6 6 B Autonics motor 1: 은편축형만제공합니다. 2: Standard 결선방식은주문사양입니다. ( 단, 24각, A4K-G564(W), A8K-G566(W) 은제외입니다.) 모델구성 Q-42 모터형식 적용모델 : 기어드일체형,, 로터리액츄에이터형, 로터리액츄에이터 + A M 5 최대허용토크 모터상수
모델구성 적용모델 : 표준축형,, A 8K M 5 6 6 B Autonics motor 1: 은편축형만제공합니다. 2: Standard 결선방식은주문사양입니다. ( 단, 24각, A4K-G564(W), A8K-G566(W) 은제외입니다.) 모델구성 Q-42 모터형식 적용모델 : 기어드일체형,, 로터리액츄에이터형, 로터리액츄에이터 + A M 5 최대허용토크 모터상수
1. 제품소개 그림. 1.1 이란? DC 모터구동시하드웨어제작에소요되는시간을단축시켜프로그래밍연구개발및학습효과를극대화시켜주는 입니다. 또한당사 DEV 보드와 1P 점퍼클립케이블을이용하여연동이가능하며, 산업용 DC 모터의정회전, 역회전구동및속도제어시유용하게사용되는 입니다.
 매뉴얼 (Model: ET-DCM) 이경남 L K 임베디드 서울북부기술인재학원 2013 LK EMBEDDED ET-DCM version 1.0 페이지 1 1. 제품소개 그림. 1.1 이란? DC 모터구동시하드웨어제작에소요되는시간을단축시켜프로그래밍연구개발및학습효과를극대화시켜주는 입니다. 또한당사 DEV 보드와 1P 점퍼클립케이블을이용하여연동이가능하며, 산업용
매뉴얼 (Model: ET-DCM) 이경남 L K 임베디드 서울북부기술인재학원 2013 LK EMBEDDED ET-DCM version 1.0 페이지 1 1. 제품소개 그림. 1.1 이란? DC 모터구동시하드웨어제작에소요되는시간을단축시켜프로그래밍연구개발및학습효과를극대화시켜주는 입니다. 또한당사 DEV 보드와 1P 점퍼클립케이블을이용하여연동이가능하며, 산업용
제목을 입력하십시오
 위상제어정류기 Prf. ByungKuk Lee, Ph.D. Energy Mechatrnics Lab. Schl f Infrmatin and Cmmunicatin Eng. Sungkyunkwan University Tel: 8212994581 Fax: 8212994612 http://seml.skku.ac.kr EML: bkleeskku@skku.edu 위상제어정류회로
위상제어정류기 Prf. ByungKuk Lee, Ph.D. Energy Mechatrnics Lab. Schl f Infrmatin and Cmmunicatin Eng. Sungkyunkwan University Tel: 8212994581 Fax: 8212994612 http://seml.skku.ac.kr EML: bkleeskku@skku.edu 위상제어정류회로
Motor Control Solution
 Motor Control Solution 마이크로칩에서는 Stepper, Brushed-DC, AC Induction, Switched Reluctance Brushless-DC 등모터종류별특성및동작방식에맞는 MCU가준비되어있어, User가 Motor를이용한 Application을개발하려할때에가장적절한 Solution을제시해줄수있다. 이중 FFT나 PID연산등정밀한모터제어를실행하기위해꼭해주어야하는빠른
Motor Control Solution 마이크로칩에서는 Stepper, Brushed-DC, AC Induction, Switched Reluctance Brushless-DC 등모터종류별특성및동작방식에맞는 MCU가준비되어있어, User가 Motor를이용한 Application을개발하려할때에가장적절한 Solution을제시해줄수있다. 이중 FFT나 PID연산등정밀한모터제어를실행하기위해꼭해주어야하는빠른
½½¶óÀ̵å Á¦¸ñ ¾øÀ½
 0.2 완전차동 (fully dfferental) OP amp Dfferental nput, Dfferental output Easy to cascade OP amps nsenstve to supply nose Hgh gan Fully dff OP amp requres CMFB Hgh Speed CMOS IAB, POSTECH 0.2. NMOS 입력완전차동
0.2 완전차동 (fully dfferental) OP amp Dfferental nput, Dfferental output Easy to cascade OP amps nsenstve to supply nose Hgh gan Fully dff OP amp requres CMFB Hgh Speed CMOS IAB, POSTECH 0.2. NMOS 입력완전차동
시작하기 시작할 준비가 되었으면 다음 설명에 따라 설문조사를 실시한다. 1단계: 허락받기 클럽을 떠나는 회원에게 에 응해 줄 것인지 물어본다. 이 설문 조사는 클럽의 문제점을 보완해 향후 같은 이유로 이탈하는 회원들이 없도록 하기 위한 것이며, 응답 내용은 대외비로 처
 떠나는 이유 알아보기 왜 클럽을 떠나는가? 이는 클럽을 떠나기로 결심한 동료들에게 반드시 물어봐야 할 질문이다. 그리고 그 답이 무엇이든 다시는 같은 이유로 클럽을 떠나는 회원이 없도록 개선책을 마련해야 한다. 를 사용해 왜 회원들이 클럽을 떠나는지, 그리고 앞으로 회원들의 이탈을 막으려면 어떻게 해야 할 것인지 논의를 시작한다. 클럽 회원위원회는 이 설문조사를
떠나는 이유 알아보기 왜 클럽을 떠나는가? 이는 클럽을 떠나기로 결심한 동료들에게 반드시 물어봐야 할 질문이다. 그리고 그 답이 무엇이든 다시는 같은 이유로 클럽을 떠나는 회원이 없도록 개선책을 마련해야 한다. 를 사용해 왜 회원들이 클럽을 떠나는지, 그리고 앞으로 회원들의 이탈을 막으려면 어떻게 해야 할 것인지 논의를 시작한다. 클럽 회원위원회는 이 설문조사를
Microsoft PowerPoint 상 교류 회로
 3상교류회로 11.1. 3 상교류의발생 평등자계중에놓인회전자철심에기계적으로 120 씩차이가나게감은코일 aa, bb,cc 를배치하고각속도의속도로회전하면각코일의양단에는다음식으로표현되는기전력이발생하게된다. 11.1. 3 상교류의발생 여기서 e a, e b, e c 는각각코일aa, bb, cc 양단에서얻어지는전압의순시치식이며, 각각을상 (phase) 이라한다. 이와같이전압의크기는같고위상이
3상교류회로 11.1. 3 상교류의발생 평등자계중에놓인회전자철심에기계적으로 120 씩차이가나게감은코일 aa, bb,cc 를배치하고각속도의속도로회전하면각코일의양단에는다음식으로표현되는기전력이발생하게된다. 11.1. 3 상교류의발생 여기서 e a, e b, e c 는각각코일aa, bb, cc 양단에서얻어지는전압의순시치식이며, 각각을상 (phase) 이라한다. 이와같이전압의크기는같고위상이
1. REACTOR TAP 90% 로변경, 제작공급한사유 - 고객요청사항은 REACTOR 80% 운전기준임. - 삼성테크윈에서사용하는표준 REACTOR 사양은 80%, 75%, 70% 로 STARTER 도면은표준사양으로제출됨. - 동프로젝트용모터사양서 / 성적서확인결과
 1. REACTOR TAP 90% 로변경, 제작공급한사유 - 고객요청사항은 REACTOR 80% 운전기준임. - 삼성테크윈에서사용하는표준 REACTOR 사양은 80%, 75%, 70% 로 STARTER 도면은표준사양으로제출됨. - 동프로젝트용모터사양서 / 성적서확인결과기동전류가 400% 이하로표준모터의 650% 대비상당히낮은기동특성을가지고있어, 압축기운용시기동시간등을감안하여
1. REACTOR TAP 90% 로변경, 제작공급한사유 - 고객요청사항은 REACTOR 80% 운전기준임. - 삼성테크윈에서사용하는표준 REACTOR 사양은 80%, 75%, 70% 로 STARTER 도면은표준사양으로제출됨. - 동프로젝트용모터사양서 / 성적서확인결과기동전류가 400% 이하로표준모터의 650% 대비상당히낮은기동특성을가지고있어, 압축기운용시기동시간등을감안하여
200W에서 7.5KW까지 라인업!! 전 모델 19Bit 앱솔루트 엔코더 채용!! SMG & SD Series Full Digital AC Servo System CSCAM
 W에서 7.5KW까지 라인업!! 전 모델 19Bit 앱솔루트 엔코더 채용!! SMG & SD Series Full Digital C Servo System CSCM SMG Series Servo Motor for High Speed Machining 서보모터제품형식 SMG 4 1 1 시리즈명 용량 입력전압 엔코더 설계사양 축단사양 브레이크사양 SMG : 고토크용
W에서 7.5KW까지 라인업!! 전 모델 19Bit 앱솔루트 엔코더 채용!! SMG & SD Series Full Digital C Servo System CSCM SMG Series Servo Motor for High Speed Machining 서보모터제품형식 SMG 4 1 1 시리즈명 용량 입력전압 엔코더 설계사양 축단사양 브레이크사양 SMG : 고토크용
PowerPoint Presentation
 신호조절 (Signal Conditioning) 메카트로닉스 시스템의 구성 ECU 인터페이스 회로 (시그널 컨디셔닝) 마이컴 Model of 기계 시스템 인터페이스 회로 (드라이빙 회로) 센서 액츄에이터 (구동기) 기계 시스템 PN 접합 다이오드 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드 응용회로 [1] 다이오드
신호조절 (Signal Conditioning) 메카트로닉스 시스템의 구성 ECU 인터페이스 회로 (시그널 컨디셔닝) 마이컴 Model of 기계 시스템 인터페이스 회로 (드라이빙 회로) 센서 액츄에이터 (구동기) 기계 시스템 PN 접합 다이오드 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드 응용회로 [1] 다이오드
DC Motors
 DC s Contents B Information -01 Product Coding System -04 Products Lineup -08 일반정보 -12 용어해설 -15 사용시주의사항 C s B-01 C 의기술자료 B-06 Induction B-48 2 Pole B-66 Reversible B-98 Electromagnetic Brake B-138 Clutch
DC s Contents B Information -01 Product Coding System -04 Products Lineup -08 일반정보 -12 용어해설 -15 사용시주의사항 C s B-01 C 의기술자료 B-06 Induction B-48 2 Pole B-66 Reversible B-98 Electromagnetic Brake B-138 Clutch
실험 5
 실험. OP Amp 의기본특성 이상적 (ideal) OP Amp OP amp는연산증폭기 (operational amp) 라고도불리며, 여러개의트랜지스터로구성이된차동선형증폭기 (differential linear amplifier) 이다. OP amp는가산, 적분, 미분과같은수학적연산을수행하는회로에사용될수있으며, 비디오, 오디오증폭기, 발진기등에널리사용되고있다.
실험. OP Amp 의기본특성 이상적 (ideal) OP Amp OP amp는연산증폭기 (operational amp) 라고도불리며, 여러개의트랜지스터로구성이된차동선형증폭기 (differential linear amplifier) 이다. OP amp는가산, 적분, 미분과같은수학적연산을수행하는회로에사용될수있으며, 비디오, 오디오증폭기, 발진기등에널리사용되고있다.
서보교육자료배포용.ppt
 1. 2. 3. 4. 1. ; + - & (22kW ) 1. ; 1975 1980 1985 1990 1995 2000 DC AC (Ferrite) (NdFeB; ) /, Hybrid Power Thyrister TR IGBT IPM Analog Digital 16 bit 32 bit DSP RISC Dip SMD(Surface Mount Device) P,
1. 2. 3. 4. 1. ; + - & (22kW ) 1. ; 1975 1980 1985 1990 1995 2000 DC AC (Ferrite) (NdFeB; ) /, Hybrid Power Thyrister TR IGBT IPM Analog Digital 16 bit 32 bit DSP RISC Dip SMD(Surface Mount Device) P,
슬라이드 1
 3 장유도전동기의동특성해석법 3-1 αβ좌표계에서 IM의지배방정식 [2] abc 좌표계에서유도전동기전압방정식 1 (1) 유도전동기의전압방정식 dλas dλbs dλcs vas = Ri s as +, vbs = Ri s bs +, vcs = Ri s cs + dt dt dt dλar dλbr dλcr var = Ri r ar +, vbr = Ri r br +,
3 장유도전동기의동특성해석법 3-1 αβ좌표계에서 IM의지배방정식 [2] abc 좌표계에서유도전동기전압방정식 1 (1) 유도전동기의전압방정식 dλas dλbs dλcs vas = Ri s as +, vbs = Ri s bs +, vcs = Ri s cs + dt dt dt dλar dλbr dλcr var = Ri r ar +, vbr = Ri r br +,
S O L U T I O N I N N O V A T I O N T P C M E C H A T R O N I C S TPC TPC SERVO & STEP MOTOR, DRIVER Series TDB2000 (일체형/분리형,
 S O L U T I O N I N N O V A T I O N T P C M E C H A T R O N I C S TPC-1606-1 www.tpcpage.co.kr TPC SERVO & STEP MOTOR, DRIVER Series TDB2000 (일체형/분리형, 제어기능 내장) TDB3000 (EtherCAT) TDCI (일체형, 제어기능 내장) TDB/TDU
S O L U T I O N I N N O V A T I O N T P C M E C H A T R O N I C S TPC-1606-1 www.tpcpage.co.kr TPC SERVO & STEP MOTOR, DRIVER Series TDB2000 (일체형/분리형, 제어기능 내장) TDB3000 (EtherCAT) TDCI (일체형, 제어기능 내장) TDB/TDU
Stepper Motors
 tepper Motor 제어 28 Microchip Technology Incorporated. All Rights Reserved. tepper Motor Control lide 1 Agenda 1. 스텝모터기초 2. Full tep 제어 (1상/2 상제어 ) 3. Half tep 제어 (1-2 상제어 ) 4. Micro tepping 제어 28 Microchip
tepper Motor 제어 28 Microchip Technology Incorporated. All Rights Reserved. tepper Motor Control lide 1 Agenda 1. 스텝모터기초 2. Full tep 제어 (1상/2 상제어 ) 3. Half tep 제어 (1-2 상제어 ) 4. Micro tepping 제어 28 Microchip
SEML ppt 서식
 Presented by Byoung-Kuk Lee, Ph. D., Senior IEEE Energy Mechtronics Lb. College of Informtion nd Communiction Eng. Sungkyunkwn University Tel: 8-31-99-4581 Fx: 8-31-99-461 http://seml.skku.c.kr EML: bkleeskku@skku.edu
Presented by Byoung-Kuk Lee, Ph. D., Senior IEEE Energy Mechtronics Lb. College of Informtion nd Communiction Eng. Sungkyunkwn University Tel: 8-31-99-4581 Fx: 8-31-99-461 http://seml.skku.c.kr EML: bkleeskku@skku.edu
사용자 설명서 SERVO DRIVE (FARA-CSD,CSDP-XX)
") A3 : 30W 10 : 1kW A5 : 50W 15 : 1.5kW 01 : 100W 20 : 2kW.... 08 : 800W 50 : 5kW CSD series CSDD series CSDF series CSDS series CSDH series CSDN series CSDX series A : AC110V B : AC220V S : / P : 20?C
A3 : 30W 10 : 1kW A5 : 50W 15 : 1.5kW 01 : 100W 20 : 2kW.... 08 : 800W 50 : 5kW CSD series CSDD series CSDF series CSDS series CSDH series CSDN series CSDX series A : AC110V B : AC220V S : / P : 20?C
슬라이드 1
 임베디드시스템개론 : Arduino 활용 Lecture #9: Motor 제어 2012. 5. 18 by 김영주 강의목차 소형모터개요 트랜지스터를이용한 DC 모터제어 Motor Driver IC를이용한 DC 모터제어 Servo 모터제어 2 3 1. 소형모터 (Motor) 소형모터 (1) 소형모터 전기에너지를회전운동으로변환하는장치모터소형화로다양하게응용되고있음
임베디드시스템개론 : Arduino 활용 Lecture #9: Motor 제어 2012. 5. 18 by 김영주 강의목차 소형모터개요 트랜지스터를이용한 DC 모터제어 Motor Driver IC를이용한 DC 모터제어 Servo 모터제어 2 3 1. 소형모터 (Motor) 소형모터 (1) 소형모터 전기에너지를회전운동으로변환하는장치모터소형화로다양하게응용되고있음
..........-....33
 04 06 12 14 16 18 20 22 24 26 Contents 34 38 42 46 50 54 58 62 66 70 74 78 84 88 90 92 94 96 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 01 26 27 02 28 29 30 31 32 33 34 35 36 37 38 39
04 06 12 14 16 18 20 22 24 26 Contents 34 38 42 46 50 54 58 62 66 70 74 78 84 88 90 92 94 96 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 01 26 27 02 28 29 30 31 32 33 34 35 36 37 38 39
자식농사웹완
 윤 영 선 _ 지음 은혜한의원 서울시 마포구 도화1동 550 삼성프라자 308호 Tel : 3272.0120, 702.0120 진료시간 : 오전 9시 30분`~`오후 7시 점심시간 : 오후 1시`~`2시 토 요 일 : 오전 9시 30분`~`오후 3시 (일, 공휴일 휴진`/`전화로 진료 예약 받습니다) 은 혜 한 의 원 은혜한의원 CONTENTS 02 04 07
윤 영 선 _ 지음 은혜한의원 서울시 마포구 도화1동 550 삼성프라자 308호 Tel : 3272.0120, 702.0120 진료시간 : 오전 9시 30분`~`오후 7시 점심시간 : 오후 1시`~`2시 토 요 일 : 오전 9시 30분`~`오후 3시 (일, 공휴일 휴진`/`전화로 진료 예약 받습니다) 은 혜 한 의 원 은혜한의원 CONTENTS 02 04 07
chungo_story_2013.pdf
 Contents 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59 61 63 65 67 69 71 73 75 77 79 81 83 85 87 89 91 93 95 97 99
Contents 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59 61 63 65 67 69 71 73 75 77 79 81 83 85 87 89 91 93 95 97 99




 Contents 12 13 15 17 70 79 103 107 20 21 24 29 128 137 141 32 34 36 41 46 47 53 55 174 189 230 240 58 61 64 1. 1. 1 2 3 4 2. 2. 2 1 3 4 3. 3. 1 2 3 4 4. 4. 1 2 3 4 5. 5. 1 2 3 1 2 3
Contents 12 13 15 17 70 79 103 107 20 21 24 29 128 137 141 32 34 36 41 46 47 53 55 174 189 230 240 58 61 64 1. 1. 1 2 3 4 2. 2. 2 1 3 4 3. 3. 1 2 3 4 4. 4. 1 2 3 4 5. 5. 1 2 3 1 2 3
 http://www.forest.go.kr 5 2013~2017 Contents 07 08 10 19 20 30 33 34 38 39 40 44 45 47 49 51 52 53 53 57 63 67 Contents 72 75 76 77 77 82 88 93 95 96 97 97 103 109 115 121 123 124 125 125 129 132 137
http://www.forest.go.kr 5 2013~2017 Contents 07 08 10 19 20 30 33 34 38 39 40 44 45 47 49 51 52 53 53 57 63 67 Contents 72 75 76 77 77 82 88 93 95 96 97 97 103 109 115 121 123 124 125 125 129 132 137
전반부-pdf
 Contents 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72
Contents 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72


<4D6963726F736F667420506F776572506F696E74202D20312E20B0E6C1A6C0FCB8C15F3136B3E2C7CFB9DDB1E25F325FC6ED28C0BA292E70707478>
 Contents 3 2016 4 2016 5 2016 6 2016 7 2016 8 2016 9 2016 10 2016 11 2016 12 2016 13 2016 14 2016 15 2016 16 2016 17 2016 18 2016 19 2016 20 2016 21 2016 22 2016 23 2016 24 2016 25 2016 26 2016 27 2016
Contents 3 2016 4 2016 5 2016 6 2016 7 2016 8 2016 9 2016 10 2016 11 2016 12 2016 13 2016 14 2016 15 2016 16 2016 17 2016 18 2016 19 2016 20 2016 21 2016 22 2016 23 2016 24 2016 25 2016 26 2016 27 2016








..........- ........
 Contents 24 28 32 34 36 38 40 42 44 46 50 52 54 56 58 60 61 62 64 66 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 01 02 24 25 03 04 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40
Contents 24 28 32 34 36 38 40 42 44 46 50 52 54 56 58 60 61 62 64 66 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 01 02 24 25 03 04 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40
 Contents 007 008 016 125 126 130 019 022 027 029 047 048 135 136 139 143 145 150 058 155 073 074 078 158 163 171 182 089 195 090 100 199 116 121 01 01 02 03 04 05 06 8 9 01 02 03 04 05 06 10 11 01 02 03
Contents 007 008 016 125 126 130 019 022 027 029 047 048 135 136 139 143 145 150 058 155 073 074 078 158 163 171 182 089 195 090 100 199 116 121 01 01 02 03 04 05 06 8 9 01 02 03 04 05 06 10 11 01 02 03

A°ø¸ðÀü ³»Áö1-¼öÁ¤
 1 4 5 6 7 8 9 10 11 Contents 017 035 051 067 081 093 107 123 139 151 165 177 189 209 219 233 243 255 271 287 299 313 327 337 349 12 13 017 18 19 20 21 22 23 24 25 26 27 28 29 30 31 035 051 067 081 093
1 4 5 6 7 8 9 10 11 Contents 017 035 051 067 081 093 107 123 139 151 165 177 189 209 219 233 243 255 271 287 299 313 327 337 349 12 13 017 18 19 20 21 22 23 24 25 26 27 28 29 30 31 035 051 067 081 093
±¹³»°æÁ¦ º¹»ç1
 Contents 2 2002. 1 116 2002. 1 2002. 1 117 118 2002. 1 2002. 1 119 120 2002. 1 2002. 1 121 122 2002. 1 2002. 1 123 124 2002. 1 2002. 1 125 126 2002. 1 2002. 1 127 128 2002. 1 2002. 1 129 130 2002. 1 2002.
Contents 2 2002. 1 116 2002. 1 2002. 1 117 118 2002. 1 2002. 1 119 120 2002. 1 2002. 1 121 122 2002. 1 2002. 1 123 124 2002. 1 2002. 1 125 126 2002. 1 2002. 1 127 128 2002. 1 2002. 1 129 130 2002. 1 2002.
¿¡³ÊÁö ÀÚ¿ø-Âü°í ³»Áö.PDF
 Contents 01 02 03 6 04 05 7 8 9 01 10 02 03 11 04 01 12 02 13 03 04 14 01 02 03 04 15 05 06 16 07 17 08 18 01 02 03 19 04 20 05 21 06 07 22 08 23 24 25 26 27 28 29 30 31 32 33 01 36 02 03 37 38 01
Contents 01 02 03 6 04 05 7 8 9 01 10 02 03 11 04 01 12 02 13 03 04 14 01 02 03 04 15 05 06 16 07 17 08 18 01 02 03 19 04 20 05 21 06 07 22 08 23 24 25 26 27 28 29 30 31 32 33 01 36 02 03 37 38 01
전반부-pdf
 Contents 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72
Contents 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72

Microsoft PowerPoint - 3. 2016 하반기 크레딧 전망_V3.pptx
 Contents 3 2016 4 2016 5 2016 6 2016 7 2016 8 2016 9 2016 10 2016 11 2016 12 2016 13 2016 14 2016 15 2016 16 2016 17 2016 18 2016 19 2016 20 2016 21 2016 22 2016 23 2016 24 2016 25 2016 26 2016 27 2016
Contents 3 2016 4 2016 5 2016 6 2016 7 2016 8 2016 9 2016 10 2016 11 2016 12 2016 13 2016 14 2016 15 2016 16 2016 17 2016 18 2016 19 2016 20 2016 21 2016 22 2016 23 2016 24 2016 25 2016 26 2016 27 2016

양성내지b72뼈訪?303逞
 Contents 성매매 예방교육 가이드북 Contents 제3부 성매매의 어제와 오늘 그리고 한국의 현주소 제4부 처벌 과 보호 의 성매매방지법 1. 성매매의 역사적 배경 및 추이 1. 성매매방지법 제정 배경 62 2. 성매매방지법 제정 취지 63 40 2. 성매매에 대한 국가별 개입 양상 42 3. 규범적 판단과 형사처벌을 기준으로 본 성매매 4. 외국의
Contents 성매매 예방교육 가이드북 Contents 제3부 성매매의 어제와 오늘 그리고 한국의 현주소 제4부 처벌 과 보호 의 성매매방지법 1. 성매매의 역사적 배경 및 추이 1. 성매매방지법 제정 배경 62 2. 성매매방지법 제정 취지 63 40 2. 성매매에 대한 국가별 개입 양상 42 3. 규범적 판단과 형사처벌을 기준으로 본 성매매 4. 외국의
³»Áöc03âš
 08 09 27 20 32 42 contents 3 4 5 6 7 8 9 28 10 11 42 38 12 13 45 48 44 14 15 53 50 16 17 58 54 18 19 20 21 22 23 24 25 2008. 5. 27~30 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 2008. 4. 27 42 43 44
08 09 27 20 32 42 contents 3 4 5 6 7 8 9 28 10 11 42 38 12 13 45 48 44 14 15 53 50 16 17 58 54 18 19 20 21 22 23 24 25 2008. 5. 27~30 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 2008. 4. 27 42 43 44

¾ç¼º-¾÷¹«Æí¶÷-³»¿ëÃà¼Ò4
 contents 6 9 18 21 23 43 44 53 61 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62
contents 6 9 18 21 23 43 44 53 61 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62
전도대회자료집
 1 Contents 8 10 57 4 2 63 6 17 43 12 3 4 5 7 6 7 6 8 9 10 11 12 13 14 15 16 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60
1 Contents 8 10 57 4 2 63 6 17 43 12 3 4 5 7 6 7 6 8 9 10 11 12 13 14 15 16 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60
0204..........1..
 contents contents 01 6 7 8 02 9 10 11 12 13 03 14 15 16 17 18 19 20 21 22 23 24 25 26 27 01 30 31 32 33 34 35 36 37 02 38 39 40 41 42 43 44 45 46 03 47 48 49 50 51 52 53 54 55 56 04 57 58 59 60 61
contents contents 01 6 7 8 02 9 10 11 12 13 03 14 15 16 17 18 19 20 21 22 23 24 25 26 27 01 30 31 32 33 34 35 36 37 02 38 39 40 41 42 43 44 45 46 03 47 48 49 50 51 52 53 54 55 56 04 57 58 59 60 61



µ¶ÀÏÅëÀÏÁý1~2Æíq36£02Ð
 CONTENTS 3 9 16 20 24 29 33 36 40 48 50 56 60 64 71 76 80 83 88 91 94 97 100 103 106 109 114 116 128 133 139 144 148 151 154 159 170 173 176 181 183 188 190 192 194 198 202 209 212 218 221 228 231 233
CONTENTS 3 9 16 20 24 29 33 36 40 48 50 56 60 64 71 76 80 83 88 91 94 97 100 103 106 109 114 116 128 133 139 144 148 151 154 159 170 173 176 181 183 188 190 192 194 198 202 209 212 218 221 228 231 233

VB
 Chap2. 로봇의구성요소 1. 로봇액추에이터 2. 로봇센서 3. 로봇기계요소 4. 로봇제어기및부가장치 로봇의구성요소 1 1. 로봇액추에이터 액추에이터 (Actuator) 란? 외부로부터에너지를공급받아동력을생산하는기기 액추에이터의종류 로봇의구성요소 2 1 1. 로봇액추에이터 모터 (Motor) 모터는전기에너지를회전운동의기계적에너지로변환하는전기부품 모터동작원리
Chap2. 로봇의구성요소 1. 로봇액추에이터 2. 로봇센서 3. 로봇기계요소 4. 로봇제어기및부가장치 로봇의구성요소 1 1. 로봇액추에이터 액추에이터 (Actuator) 란? 외부로부터에너지를공급받아동력을생산하는기기 액추에이터의종류 로봇의구성요소 2 1 1. 로봇액추에이터 모터 (Motor) 모터는전기에너지를회전운동의기계적에너지로변환하는전기부품 모터동작원리
Microsoft PowerPoint - 6. FET 증폭기
 FET 증폭기 E-al: hjun@hanyan.ac.kr http://web.ynse.ac.kr/hjun FET 증폭기 MOFET 증폭기는동작측면에서 4 장에서설명한 BJT 증폭기와유사. BJT 증폭기에비해입력저항이매우커서, 증폭단사이신호전달이보다효율적임. 공통소오스증폭기 공통드레인증폭기 공통게이트증폭기 E-al: hjun@hanyan.ac.kr http://web.ynse.ac.kr/hjun
FET 증폭기 E-al: hjun@hanyan.ac.kr http://web.ynse.ac.kr/hjun FET 증폭기 MOFET 증폭기는동작측면에서 4 장에서설명한 BJT 증폭기와유사. BJT 증폭기에비해입력저항이매우커서, 증폭단사이신호전달이보다효율적임. 공통소오스증폭기 공통드레인증폭기 공통게이트증폭기 E-al: hjun@hanyan.ac.kr http://web.ynse.ac.kr/hjun
Microsoft Word - DCMD-1000 사용자 메뉴얼.docx
 DCDM-1000(Ver.1.0 DC모터 드라이버 (DCMD-1000) 사용 설명서 V1.0 Last updated : March 6, 2014 1 / 10 DCDM-1000(Ver.1.0) 목차 1 소개 및 특징 1.1 소개 1.2 사양 1.3 특징 2 DC모터 드라이버(DCMD-1000) 사용법 2.1 전체결선도 2.2 Pin 설명 및 모드 설정 방법 2.3
DCDM-1000(Ver.1.0 DC모터 드라이버 (DCMD-1000) 사용 설명서 V1.0 Last updated : March 6, 2014 1 / 10 DCDM-1000(Ver.1.0) 목차 1 소개 및 특징 1.1 소개 1.2 사양 1.3 특징 2 DC모터 드라이버(DCMD-1000) 사용법 2.1 전체결선도 2.2 Pin 설명 및 모드 설정 방법 2.3
Microsoft PowerPoint - 8. 전력
 전력 8.. 전력의정의 직류회로의전력 전력 P W Q W Q P t t W Q Q t VI W: 일, t: 시간, Q: 전하량, V: 전압, 전위차, I: 전류 P VI RI I RI V V R V R 8.. 전력의정의 8.. 정현파교류회로에서의전력 평균전력 (average power) 또는유효전력 (effective power) 교류회로에서는전압, 전류가모두변하기때문에,
전력 8.. 전력의정의 직류회로의전력 전력 P W Q W Q P t t W Q Q t VI W: 일, t: 시간, Q: 전하량, V: 전압, 전위차, I: 전류 P VI RI I RI V V R V R 8.. 전력의정의 8.. 정현파교류회로에서의전력 평균전력 (average power) 또는유효전력 (effective power) 교류회로에서는전압, 전류가모두변하기때문에,
형명및정격 (MCCB) 배선용차단기 (AB - 시리즈 ) 프레임의크기 50AF Type 형명 정격 극수 (Pole) 정격전류 (In) A 정격전압 (Ue) AC (V) DC (V) 정격절연전압 (Ui) V 정격임펄스전압 (Uimp) kv 정격차단전류 (ka) 주1) A
 배선용차단기 (AB - 시리즈 ) 프레임의크기 50AF Type 형명 정격 극수 (Pole) 정격전류 (In) A 정격전압 (Ue) AC (V) DC (V) 정격절연전압 (Ui) V 정격임펄스전압 (Uimp) kv 정격차단전류 (ka) 주1) A") 0F 정격 극수 (Pole) C () 정격임펄스전압 (Uimp) k 정격차단전류 (k) 주1) C K SC 821 (Sym) 4/00 IEC0947-2 (lcu) 41 2 DC 순시트립동작특성내구수명 ( 회 ) 기계적전기적 c1 주2) c2 주2) 부속장치 보조접점 X L 부족 UT 외부조작 표면부착형 (D) 핸들 확장형 (E) 단자커버 Long Short
0F 정격 극수 (Pole) C () 정격임펄스전압 (Uimp) k 정격차단전류 (k) 주1) C K SC 821 (Sym) 4/00 IEC0947-2 (lcu) 41 2 DC 순시트립동작특성내구수명 ( 회 ) 기계적전기적 c1 주2) c2 주2) 부속장치 보조접점 X L 부족 UT 외부조작 표면부착형 (D) 핸들 확장형 (E) 단자커버 Long Short
REVERSIBLE MOTOR 표지.gul
 REVERSIBLE MOTOR NEW H-SERIES REVERSIBLE MOTOR H-EX Series LEAD WIRE w RH 1PHASE 4 POLE PERFORMANCE DATA (DUTY : Min.) MOTOR OUTPUT VOLTAGE (V) FREQUENCY (Hz) INPUT CURRENT (ma) RATING SPEED (rpm) STARTING
REVERSIBLE MOTOR NEW H-SERIES REVERSIBLE MOTOR H-EX Series LEAD WIRE w RH 1PHASE 4 POLE PERFORMANCE DATA (DUTY : Min.) MOTOR OUTPUT VOLTAGE (V) FREQUENCY (Hz) INPUT CURRENT (ma) RATING SPEED (rpm) STARTING
Microsoft PowerPoint - lec06_2007
 Opertil Ampliier A µa74 itegrted circuit h eight cectig pi 주요한단자. iertig iput. iertig iput. utput 4. pitie pwer upply 5. egtie pwer upply b The crrepdece betwee the circled pi umber the itegrted circuit
Opertil Ampliier A µa74 itegrted circuit h eight cectig pi 주요한단자. iertig iput. iertig iput. utput 4. pitie pwer upply 5. egtie pwer upply b The crrepdece betwee the circled pi umber the itegrted circuit
실험 5
 실험. apacitor 및 Inductor 의특성 교류회로 apacitor 의 apacitance 측정 본실험에서는 capacitor를포함하는회로에교류 (A) 전원이연결되어있을때, 정상상태 (steady state) 에서 capacitor의전압과전류의관계를알아본다. apacitance의값이 인 capacitor의전류와전압의관계는다음식과같다. i dv = dt
실험. apacitor 및 Inductor 의특성 교류회로 apacitor 의 apacitance 측정 본실험에서는 capacitor를포함하는회로에교류 (A) 전원이연결되어있을때, 정상상태 (steady state) 에서 capacitor의전압과전류의관계를알아본다. apacitance의값이 인 capacitor의전류와전압의관계는다음식과같다. i dv = dt
 HiGEN FDA7000 Content Oct. 05, 2005 Changwon, Korea Elevator Tet Tower A B Elevator Motor Parking Sytem Tet Tower 963 977 Elevator 986 995 LG 997 Capa 43 People 2,37 m² 523,200/ 998 LG (LGLG) 998 LG Elevator
HiGEN FDA7000 Content Oct. 05, 2005 Changwon, Korea Elevator Tet Tower A B Elevator Motor Parking Sytem Tet Tower 963 977 Elevator 986 995 LG 997 Capa 43 People 2,37 m² 523,200/ 998 LG (LGLG) 998 LG Elevator
Microsoft Word - KSR2013A083
 2013 년도한국철도학회추계학술대회논문집 KSR2013A083 철도차량용견인전동기를위한추진인버터의비선형성보상에관한연구 Study on compensation method of the nonlinearity of the propulsion inverter for railway traction motor 정신명, 박찬배, 김재희, 이준호, 이수길, 이병송 Shin-Myung
2013 년도한국철도학회추계학술대회논문집 KSR2013A083 철도차량용견인전동기를위한추진인버터의비선형성보상에관한연구 Study on compensation method of the nonlinearity of the propulsion inverter for railway traction motor 정신명, 박찬배, 김재희, 이준호, 이수길, 이병송 Shin-Myung
Microsoft PowerPoint - es-arduino-lecture-09
 임베디드시스템개론 : Arduino 활용 Lecture #9: Motor 제어 2012. 5. 13 by 김영주 강의목차 소형모터개요 트랜지스터를이용한 DC 모터제어 Motor Driver IC를이용한 DC 모터제어 Servo 모터제어 2 3 1. 소형모터 (Motor) 소형모터 (1) 소형모터 전기에너지를회전운동으로변환하는장치모터소형화로다양하게응용되고있음
임베디드시스템개론 : Arduino 활용 Lecture #9: Motor 제어 2012. 5. 13 by 김영주 강의목차 소형모터개요 트랜지스터를이용한 DC 모터제어 Motor Driver IC를이용한 DC 모터제어 Servo 모터제어 2 3 1. 소형모터 (Motor) 소형모터 (1) 소형모터 전기에너지를회전운동으로변환하는장치모터소형화로다양하게응용되고있음
Microsoft PowerPoint - Ch8
 Ch. 8 Field-Effect Transistor (FET) and Bias 공핍영역 D G S 채널 8-3 JFET 바이어스 자기바이어스 (self-bias) R G - 접지로부터 AC 신호를분리 I D I G = 0 G = 0 D I D I S S = I S R S I D R S S I S = G - S = 0 I D R S = - I D R S D
Ch. 8 Field-Effect Transistor (FET) and Bias 공핍영역 D G S 채널 8-3 JFET 바이어스 자기바이어스 (self-bias) R G - 접지로부터 AC 신호를분리 I D I G = 0 G = 0 D I D I S S = I S R S I D R S S I S = G - S = 0 I D R S = - I D R S D
QSE-CI-AP-D.xlsx
 Energi Savr NodeTM Programming Interface QSE-CI-AP-D는 Energi Savr Node units를사용하여 Programming 하는데사용할수있게설계된제품이다모든 Energi Savr Node 제품군 (Model 명이 QSN 및 QSNE-) 과호환이되며 Apple iphone 또는 ipod touch를사용하여 Programming
Energi Savr NodeTM Programming Interface QSE-CI-AP-D는 Energi Savr Node units를사용하여 Programming 하는데사용할수있게설계된제품이다모든 Energi Savr Node 제품군 (Model 명이 QSN 및 QSNE-) 과호환이되며 Apple iphone 또는 ipod touch를사용하여 Programming
경제통상 내지.PS
 CONTENTS I 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 II 38 39 40 41 42 43 III 46 47 48 49 50 51 52 53 54 55 56 57 58 59 IV 62 63 64 65 66 67 68 69 V
CONTENTS I 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 II 38 39 40 41 42 43 III 46 47 48 49 50 51 52 53 54 55 56 57 58 59 IV 62 63 64 65 66 67 68 69 V
°æÁ¦Åë»ó³»Áö.PDF
 CONTENTS I 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 II 38 39 40 41 42 43 III 46 47 48 49 50 51 52 53 54 55 56 57 58 59 IV 62 63 64 65 66 67 68 69 V
CONTENTS I 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 II 38 39 40 41 42 43 III 46 47 48 49 50 51 52 53 54 55 56 57 58 59 IV 62 63 64 65 66 67 68 69 V
전자회로 실험
 전자회로실험 2 조 고주현허영민 BJT의고정바이어스및 부품 * 실험목적 1) 고정바이어스와 회로의직류동작점을결정한다. 다이오드의특성 * 실험장비 계측장비 - Digital Multi Meter 부품 -저항 다이오드의특성 부품 - 트랜지스터
전자회로실험 2 조 고주현허영민 BJT의고정바이어스및 부품 * 실험목적 1) 고정바이어스와 회로의직류동작점을결정한다. 다이오드의특성 * 실험장비 계측장비 - Digital Multi Meter 부품 -저항 다이오드의특성 부품 - 트랜지스터
 ꊉꊒ ꊉꊓ ꊉꊔ ꊉꊕ ꊉꊖ ꊉꊗ ꊉꊘ ꊱ ꊲ ꊳ ꊴ ꏗ ꏗ ꏗ ꏗ ꏘ ꠑꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꁚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚ ꠛ ꠚꠚꠚꠚꠙ ꠐ ꠐ ꠝ ꠑꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꁚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚ ꠝ ꠛ ꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠙ ꠝ ꠝ ꠝ ꠝ ꠑꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꁚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚ
ꊉꊒ ꊉꊓ ꊉꊔ ꊉꊕ ꊉꊖ ꊉꊗ ꊉꊘ ꊱ ꊲ ꊳ ꊴ ꏗ ꏗ ꏗ ꏗ ꏘ ꠑꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꁚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚ ꠛ ꠚꠚꠚꠚꠙ ꠐ ꠐ ꠝ ꠑꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꁚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚ ꠝ ꠛ ꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠙ ꠝ ꠝ ꠝ ꠝ ꠑꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꁚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚꠚ
Introduction to Maxwell/ Mechanical Coupling
 ANSYS 통합해석환경을이용한전기자동차용모터성능해석 ANSYS Korea Byungkil KIM, Soohyun PARK, Jeongwon LEE, Cheonsoo JANG* 1 목차 모터설계에적용되는 ANSYS 제품군역할 모터성능해석 1 : 진동 / 소음 모터성능해석 2 : 피로수명 모터성능해석 3 : 충격강도 2 모터설계에적용되는 ANSYS 제품역할 모터설계에서고려되어야하는기초성능
ANSYS 통합해석환경을이용한전기자동차용모터성능해석 ANSYS Korea Byungkil KIM, Soohyun PARK, Jeongwon LEE, Cheonsoo JANG* 1 목차 모터설계에적용되는 ANSYS 제품군역할 모터성능해석 1 : 진동 / 소음 모터성능해석 2 : 피로수명 모터성능해석 3 : 충격강도 2 모터설계에적용되는 ANSYS 제품역할 모터설계에서고려되어야하는기초성능
10 장속도센서
 10 장속도센서 속도센서 - 직선속도센서 - 가동코일형직선속도센서 - 가동코어형직선속도센서 - 각속도센서 - 전기식타코미터 - 광학식회전속도센서 - 톱니바퀴식회전속도센서 CNU EE 10-2 운동과속도 10.1 개요 - 직선운동 (linear motion) 과속도 (linear velocity) > 직선속도는물체위치의시간적변화율로정의된다. > 속도는크기와방향을갖는벡터량이며,
10 장속도센서 속도센서 - 직선속도센서 - 가동코일형직선속도센서 - 가동코어형직선속도센서 - 각속도센서 - 전기식타코미터 - 광학식회전속도센서 - 톱니바퀴식회전속도센서 CNU EE 10-2 운동과속도 10.1 개요 - 직선운동 (linear motion) 과속도 (linear velocity) > 직선속도는물체위치의시간적변화율로정의된다. > 속도는크기와방향을갖는벡터량이며,
Microsoft Word - LAB_OPamp_Application.doc
 실험. OP Amp 의기본응용회로 Voltage Follower/Impedance Buffer 위의 OP amp 회로에서출력전압신호는입력전압신호와항상같으므로, voltage follower라고불린다. 이회로는어떤기능을가지는회로에부하저항을연결하였을때, 부하저항이미치는영향을최소화하기위해서사용될수있다. 예를들면 low-pass filter 회로에부하저항이연결된다음과같은회로를고려해본다.
실험. OP Amp 의기본응용회로 Voltage Follower/Impedance Buffer 위의 OP amp 회로에서출력전압신호는입력전압신호와항상같으므로, voltage follower라고불린다. 이회로는어떤기능을가지는회로에부하저항을연결하였을때, 부하저항이미치는영향을최소화하기위해서사용될수있다. 예를들면 low-pass filter 회로에부하저항이연결된다음과같은회로를고려해본다.
<4D F736F F F696E74202D20C0CEB9F6C5CD20C0CCB7D E35292DB3BBC1F6205BC8A3C8AF20B8F0B5E55D>
 인버터이론 (V1.5) 목차 모듈 Ⅰ. 인버터기초 이론 01. 모터이론 이론 02. 인버터이론 9 23 부록 ) 주변기기 이론01. 고조파 (THD) 이론02. 제동유닛 (DBU) & 제동저항 (DBR) 이론03. 역률이론04. EMC Filter 이론05. Resolver 이론06. Encoder 41 50 54 55 56 57 모듈 Ⅰ. 인버터기초
인버터이론 (V1.5) 목차 모듈 Ⅰ. 인버터기초 이론 01. 모터이론 이론 02. 인버터이론 9 23 부록 ) 주변기기 이론01. 고조파 (THD) 이론02. 제동유닛 (DBU) & 제동저항 (DBR) 이론03. 역률이론04. EMC Filter 이론05. Resolver 이론06. Encoder 41 50 54 55 56 57 모듈 Ⅰ. 인버터기초
Microsoft PowerPoint _모터기초이론-종합.ppt
 52/73 주식회사씨앤엠연구소 Chapter 4. 제어모터의기초 학습목적 모터사업부에서생산하고있는제어모터인 BLDC 모터의 기본원리및특성을이해하자. 학습안내 1. BLDC 모터란? 2. BLDC 모터구동원리 3. 제어모터비교및 Inverter 추이 4. 영구자석이란? BLDC 모터란? 1.1 BLDC 모터란? 정의 : BRUSHLESS DC MOTOR (DC
52/73 주식회사씨앤엠연구소 Chapter 4. 제어모터의기초 학습목적 모터사업부에서생산하고있는제어모터인 BLDC 모터의 기본원리및특성을이해하자. 학습안내 1. BLDC 모터란? 2. BLDC 모터구동원리 3. 제어모터비교및 Inverter 추이 4. 영구자석이란? BLDC 모터란? 1.1 BLDC 모터란? 정의 : BRUSHLESS DC MOTOR (DC
COMFILE_VOL13_20140204.cdr
 "다양한 산업현장에서 쓰이고 있는 컴파일 제품" 데이터 수집 데이터 수집용 필드 I/O 제품 "모드포트" 필드 I/O 전력 모니터링 로봇 제어 태양광 발전 트랙커 제어 CUPC-P80 CT1721C CB405 포장기 화력발전소-화력 감지 시스템 녹방지장치(용존산소제거장치) CT1721C CB280, CLCD-216 CUWIN3500 일회용 용기 성형기 항온항습기
"다양한 산업현장에서 쓰이고 있는 컴파일 제품" 데이터 수집 데이터 수집용 필드 I/O 제품 "모드포트" 필드 I/O 전력 모니터링 로봇 제어 태양광 발전 트랙커 제어 CUPC-P80 CT1721C CB405 포장기 화력발전소-화력 감지 시스템 녹방지장치(용존산소제거장치) CT1721C CB280, CLCD-216 CUWIN3500 일회용 용기 성형기 항온항습기