PowerPoint 프레젠테이션
|
|
|
- 혜원 궉
- 5 years ago
- Views:
Transcription
1
2 -2-
3 목차 소프트웨어교육이란? 01. Software Education KIT 02. 큐브웍스 03. 스크래치와로킷브릭 04. 로킷브릭의설치 1 장로킷블록사용하기 01. 블록, 스크립트, 스프라이트 02. 스크립트만들기 03. 변수와반복그리고조건 04. 그림그리기와스프라이트조종하기 2 장로킷시뮬레이터 01. 인벤터보드시뮬레이션 02. 게임시뮬레이션 03. 로봇구동시뮬레이션 04. 자신만의시뮬레이터만들기 3 장로봇과큐브웍스 로봇의기초 01. 모터구동의기초 02. 어보이더 03. 바닥감지로봇 04. 라인트레이서 -3-

4 소프트웨어 교육이란? SW KIT / 큐브웍스 / 로킷브릭 -4-
5 Software Education KIT 1. 왜소프트웨어코딩교육이중요할까? 소프트웨어가기반이되는과학기술의시대에머릿속의무언가를세상에보여주는단계에서소프트웨어는가장기본적인수단이되며, 이를통해생각과일을처리하는능력및학생들이소프트웨어적인사고를갖게하는것이목표입니다. 2. 소프트웨어를통한로봇제어 소프트웨어코딩을통한알고리즘능력을통해로봇을제어함으로써다양한아이디어및하드웨어제어능력을배양합니다. 문제발생시컴퓨터에게명령 효율적으로해결할수있는사고력을키움 Computational Thinking -5-

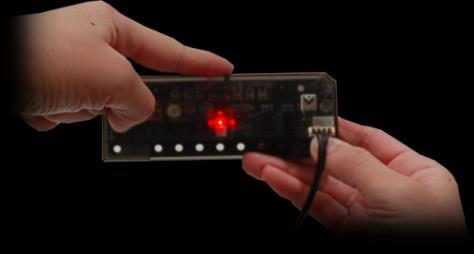
6 큐브웍스 1. 3 면이모두결합가능한완벽한 3D 블록 어려운조립과많은시간을할애했던조립부분과디테일하게표현하기어려운부분을손쉽게만들수있는 3D 블록입니다. 2. 간편한로봇, 하드웨어제어 센서, 부저, 그리고 DC 모터, Servo 모터등을손쉽게제어할수있는통합형로봇제어기와간편히연결하면되는쉬운제어성을가지고있습니다. -6-





7 스크래치와로킷브릭 (1) Java 와 C++ 같은대부분의프로그래밍언어는텍스트기반으로구성되어있기때문에초보자들이접근하기에많은어려움이있습니다. 하지만미국 MIT 대학의미디어랩 (Media Lab) 에서개발한스크래치 (Scratch) 는시각화된프로그래밍언어로서보다쉽고재미있게프로그래밍을배울수있도록하였습니다. 본래스크래치는아이들을위한교육용으로제작되어졌으며컴퓨터프로그래밍에관한풍부한경험을쌓을수있도록하는데그목적을두고있습니다만컴퓨터프로그래밍에관심이있는일반입문자들에게도적극권장되고있는바입니다. Arduino 와같은 Text 기반의프로그램도있지만, 문법적인기초지식이필요하여다루기어렵기때문에최근에 Scratch 방식으로제어되는 Scratch for Arduino, Snap for Arduino 등이만들어지고있습니다. 이러한프로그램도모두 Scratch 를기반으로프로그래밍하게하는유사프로그램입니다. -7-



8 스크래치와로킷브릭 (2) Rokit Brick 은 Snap4Arduino 를기반으로기존스크래치프로그램에로봇, 드론등다양한제어기능등이합쳐져개발된스크래치방식의소프트웨어이며, 사용방법은스크래치와동일합니다. 로킷스마트와드론파이터등의버튼들을통해하드웨어를실시간으로스크래치형식을통해제어할수있게됩니다. -8-

9 로킷브릭의설치 (1) 로킷브릭은간단히프로그램폴더를원하는경로에위치시키고 Rokitbrick.exe 실행파일을클릭하면됩니다. -9-
10 로킷브릭의설치 (2) Rokit Brick 프로그램으로인벤터보드를제어하기위해서는 다음과같이연결이필요합니다. 1. Downloader 와 Board Cable 를연결합니다. 2. Downloader 와 USB Cable 을연결합니다. 3. Inventor Board 와컴퓨터를연결합니다. (Inventor Board UART 에 Board Cable 연결 ) -10-
 드라이버설치및 COM 번호를확인후 Rokit Brick 의로킷스마트 블록카테고리를선택하고 보드에연결하기 버튼을눌러각자의")
11 로킷브릭의설치 (3) PC 와인벤터보드연결후, 제일먼저 USB 케이블드라이버설치를 진행해야합니다. ( 참조 ) 드라이버설치및 COM 번호를확인후 Rokit Brick 의로킷스마트 블록카테고리를선택하고 보드에연결하기 버튼을눌러각자의 올바른포트번호를선택하여연결하는것으로설치가완료됩니다. -11-
 메뉴를클릭, SW Education kit 의 Rokit Brick 예제및연습문제스크립트파일다운로드하기에서통합파일을다운로드받으시면됩니다.")
12 예제와연습문제다운로드 교재에서요구하는예제와연습문제는로보링크기술지원홈페이지 로접속하셔서오른쪽상단의 DOWNLOADS ( 다운로드 ) 메뉴를클릭, SW Education kit 의 Rokit Brick 예제및연습문제스크립트파일다운로드하기에서통합파일을다운로드받으시면됩니다. rokitarduino.org 로접속 상단 DOWNLOADS 클릭 SW Education kit 의하위메뉴에서통합파일을다운로드 -12-
13 1 장로킷블록사용하기 01 블록, 스크립트, 스프라이트 -13-

14 로킷브릭의구성 기본적인모든메뉴와화면구성은스크래치와유사합니다. 비교하여동작해보면보다쉽게빨리적응할수있습니다. 스크래치유저라면어렵지않게바로사용할수있습니다. 블록팔레트 메뉴 탭목록 무대확대 / 축소 시작 / 중지 무대 (Stage) 스크립트창 스프라이트목록 -14-


15 로킷브릭의구성 메뉴를통해파일을불러오거나쓸수있습니다. 열기, 저장하기는프로그램내부에저장되며, 외부로파일을공유하려면가져오기ㆍ블록내보내기의기능으로.XML 파일형식을이용해공유가능합니다. 또한언어는원하는형식으로선택할수있습니다. -15-


16 블록, 스크립트, 스트라이프 로킷브릭에는프로그래밍을할때쓰이는기본단위가 있습니다. 블록과스트라이프, 스크립트에대해알아봅시다. 하나하나낱개의단위를 블록 이라합니다. 블록마다고유색상을가지고있어, 색상을기억하고있으면프로그래밍하기가편해집니다. 블록을스크립트창으로드래그해두개이상의블록이합쳐지면 스크립트 라부릅니다. 스프라이트란로킷브릭의핵심개체이며여러스프라이트가모여하나의프로젝트를구성합니다. 모형부터소리까지전반적인역할을주관하게됩니다. -16-
 블록은명령을")
17 햇 (hat) 블록사용하기 모자처럼생긴햇 (Hat) 블록은명령을 시작하게하는시작블록입니다. 마우스를이용하여왼쪽클릭후드래그하여스크립트영역에원하는위치에놓으면됩니다. 다른블록중하나를똑같은방법으로붙여봅니다. 이렇게모아지면하나의스크립트가됩니다. -17-
18 동작블록사용하기 실제스프라이트의이미지를움직이게하는블록을동작블록이라하며, 햇블록과함께사용하여야동작이가능합니다. 햇블록과같이동작블록을연결하고어떻게동작하는지실행하여봅시다. -18-


19 무한반복블록사용하기 무한반복블록은안에들어있는블록들을무한반복시키거나무한반복블록안에있는조건블록을지속적으로사용하게해주는블록입니다. 무한반복블록같이동작블록을연결하고어떻게동작하는지실행하여봅시다. -19-

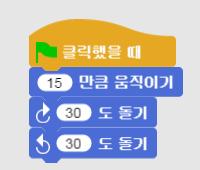
20 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 실습해봅시다 1. 스프라이트회전시키기 : 아래두가지스크립트는클릭할때마다스프라이트가회전할수있도록해줍니다. 두스크립트를실행해보고어떤차이가있는지확인해보세요. 클릭했을때 블록은스크립트를클릭했을때에만스프라이트가회전합니다. 하지만오른쪽 when I am pressed 블록은스크립트를클릭할때뿐아니라스테이지에있는스프라이트를클릭할때에도스프라이트가회전합니다. 2. 스프라이트회전컨트롤 : 키보드의왼쪽화살표키를누르면스프라이트가왼쪽으로회전하고오른쪽화살표키를누르면오른쪽으로회전할수있도록해봅시다. 도움말 : 회전블록의회전방향에유의하도록합시다! -20-



21 실습해봅시다 3. 스프라이트이동시키기 : 키보드의왼쪽화살표키를누르면스프라이트가왼쪽으로이동하고오른쪽화살표키를누르면오른쪽으로이동하게해봅시다. 이때스프라이트가이동하다가스테이지의벽을만나면더이상이동하지않고멈추게합시다. 도움말 : 왼쪽으로움직일때에는 값을주어야한다는점에유의하세요. 벽에닿으면튕기기 블록을추가하여벽에닿았을때좌표값이줄거나늘지않도록함으로스프라이트가벽너머로넘어가지않도록하였습니다. 4. 스프라이트추가하기 : 새로운스프라이트추가하기 버튼을눌러두개의스프라이트를스테이지에나타나게해봅시다. 스페이스키를눌렀을때첫번째스프라이트는회전을하고두번째스프라이트는좌우로 ( 혹은아래위로 ) 반복해서움직이게해봅시다. 첫번째스프라이트 두번째스프라이트 도움말 : 한개의스프라이트영역에두개의스크립트를모두작성하지않도록유의합니다. -21-


22 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 1. 옆의그림은동작카테고리에서발견할수있는블록들입니다. 두블록이갖고있는공통점과차이점엔무엇인지조사해보도록합시다. 2. 스프라이트를키보드의화살표키에따라움직일수있게해봅시다. 위쪽화살표를누르면위쪽으로이동하고아래쪽화살표를누르면아래쪽으로이동하며왼쪽화살표를누르면왼쪽으로이동하고오른쪽화살표를누르면오른쪽으로이동하게스크립트를작성해봅시다. 3. 옆의그림처럼 모양 탭을클릭한후붓모양버튼을클릭하여스프라이트편집기에서동그란원을그려서공모양의새로운스프라이트를추가합니다. 그다음이스프라이트가스테이지이곳저곳을다닐수있도록합니다. 벽에닿을때에는반대편방향으로튕겨야합니다. -22-
23 연습문제 4. 스프라이트를 2 개만들어줍니다. 키보드를아무거나누르면두개의스프라이트가동시에움직이기시작하며자유롭게스테이지이곳저곳을다니게하여봅시다. 첫번째스프라이트의움직임은느리게하고두번째스프라이트의속도는좀더빠르게해줍니다. 두스프라이트모두벽을만나면다른방향으로튕겨서움직여야합니다 5. 정지해있던스프라이트에마우스포인터를갖다대면계속회전할수있도록해봅시다. 이때 관찰 카테고리의 마우스의 X 좌표 블록을사용하여스프라이트에마우스포인터가가까워지면회전하는속도가느려지고멀어질수록빠르게돌게하여봅시다. -23-
24 1 장로킷블록사용하기 02 스크립트만들기 -24-
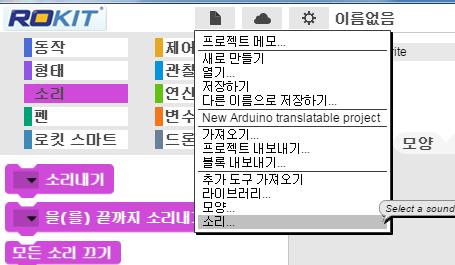


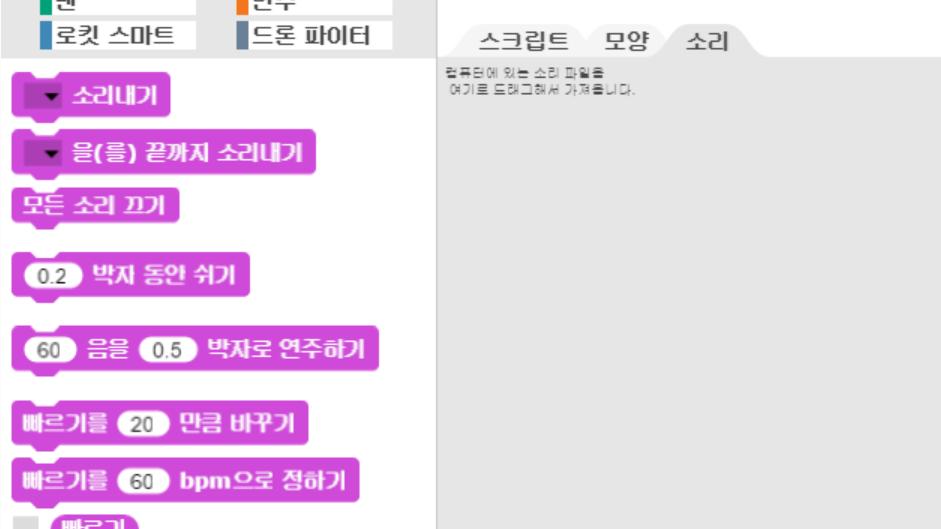
25 소리와모양파일가져오기 소리파일은특정한시점에재생하도록하여스크립트와스프라이트의효과를더할수있습니다. 메뉴 > 파일에서소리를선택합니다. Dog1.wav 소리파일을선택합니다. 클릭하면 Dog1.wav 의소리가재생됩니다. -25-

26 소리와모양파일가져오기 클릭했을때 햇블록을드래그합니다. 소리내기블록을넣은후빈칸에해당파일은선택합니다. 클릭하여실행해보세요. -26-


27 소리와모양파일가져오기 모양파일은스프라이트에자신이원하는이미지를불러와서제어할수있도록되어있으며, 자신이직접만들거나원하는파일을불러올수도있습니다. 여기서는제공되는이미지를선택해봅니다. 메뉴에서모양을선택합니다. 모양에서 dog1-a.png 를선택합니다. 무대에 dog1 의이미지 ( 스프라이트 ) 가나타났습니다. -27-


28 소리와모양파일가져오기 자신이직접만들거나원하는파일을불러올수도있습니다. 이번에는직접자신이원하는이미지를가져오고직접그린것도추가해보도록하겠습니다. 스프라이트의이름도유저가변경가능합니다. 새로운스프라이트추가하기 새로운스프라이트그리기 파일 가져오기 원하는이미지클릭하시면유저가원하는이미지 ( 스프라이트 ) 로변경이가능합니다. 유저가스프라이트를직접그릴수도있습니다. -28-

29 소리내기블록사용하기 예제의소리파일을가지고와서주인공이낼수있는효과를줄수있습니다. 클릭하면강아지가 멍멍 소리를내며 10 만큼앞으로이동합니다. 직접녹음한소리파일이나원하는음악등의파일을직접가져다가활용할수있습니다. -29-
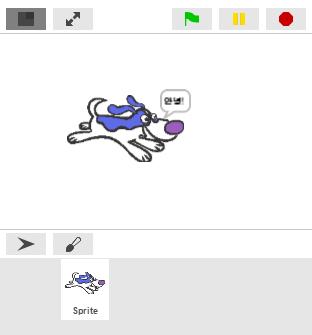

30 말풍선블록사용하기 소리에이어서눈으로보일수있도록말풍선이추가되는블록이며특히시간과함께나타났다가사라지게하는자막같은효과를줄수있습니다. 에입력한단어가 2초동안말풍선에나타납니다. 에입력한단어를말풍선에나타납니다. 에입력한단어가 2초동안생각풍선에나타납니다. 에입력한말이생각풍선에나타납니다. 아래의그림은말풍선과생각풍선을사용한예입니다. -30-




31 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 실습해봅시다 1. 스프라이트벽에튕기기 : 세개의스프라이트를만들어줍니다. 각각의스프라이트는스테이지이곳저곳을자유롭게다닐수있도록합니다. 이때 방송하기 블록을사용하여첫번째스프라이트가움직이기시작할때다른스프라이트들도동시에움직임을시작할수있도록해봅시다. 첫번째스프라이트두번째스프라이트세번째스프라이트 2. 키보드로소리제어하기 : 프로젝트메뉴의 소리 목차를클릭하면옆의그림처럼가져올수있는소리목록을볼수있습니다. 여기서 dog1.wav 파일을클릭하여로드한후에키보드의 d 키를누르면이소리파일이재생될수있도록합시다. 도움말 : 소리탭을클릭하여현재로드된소리파일목록에사용자의다른폴더에있는 *.wav 파일을드래그하여소리파일을추가할수있습니다. -31-


32 실습해봅시다 3. 연주해보기 : 소리 카테고리의음연주블록을사용하여스프라이트를클릭했을때 도레미파솔라시도 연주가시작되도록합시다. 도움말 : 61, 63, 66, 68 음은반음입니다. 따라서이예제에는사용되지않았습니다. 음계의숫자가커질수록음이높아지고작아질수록음이낮아집니다. 4. 키보드로말풍선제어하기 : 키보드의방향키중왼쪽화살표를누르면스프라이트가왼쪽으로이동하면서 LEFT! 라는메시지가담긴말풍선이스프라이트에나타나고오른쪽화살표키를누르면스프라이트가오른쪽으로이동하면서 RIGHT! 라는메시지가담긴말풍선이스프라이트에나타나도록해보세요. -32-


33 실습해봅시다 5. 회전각도알아보기 : 스크립트를클릭할때마다 10 도씩시계방향으로스프라이트가회전하도록합니다. 이때말풍선으로스프라이트가자신의회전각도를알려주도록스크립트를작성해봅시다 도움말 : 보라색말풍선만들기블록에동작카테고리에있는 방향 리포터블록을결합하였습니다. 이렇게결합시키면말풍선에는스프라이트의회전방향이각도로표시됩니다. 6. 좌표알아보기 : 키보드의왼쪽과오른쪽방향키로스프라이트를왼쪽과오른쪽으로이동시킵니다. 이때스프라이트에말풍선으로스프라이트의 X 좌표값을항상나타낼수있도록스크립트를작성해봅시다. 도움말 : 동작카테고리에있는 X 좌표 블록을말하기블록에결합하였습니다. 스프라이트를이동시키면서말풍선에나타난값을관찰해보면 5 씩증가하거나감소하는것을볼수있습니다. -33-

34 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 1. 소리카테고리에있는음계연주블록을사용해서간단한동요나음악을연주할수있도록스크립트를작성해봅시다. 이때아래블록을이용하여빠르기를조절해연주하여보고, 느리게도연주하여봅시다. 2. 스크립트를클릭하면도레미파솔라시도가계속해서연주됩니다. 이때 q 키를누르면연주속도가느려지고 w 키를누르면원래의연주속도가되고 e 키를누르면연주속도가빨라지게해봅시다. 3. 키보드의방향키로스프라이트를위, 아래, 오른쪽, 왼쪽으로조종하도록스크립트를작성합니다. 이때말풍선으로이동중인스프라이트의좌표를표시합시다. X 좌표 ( 가로 ) 방향으로움직일때에는 X 좌표값이말풍선에표시되고 Y 좌표 ( 세로 ) 방향으로움직일때에는 Y 좌표값이표시되게합시다. -34-

35 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 4. 고양이들의대화 말풍선넣기 : 옆그림처럼스테이지에스프라이트 2 개를놓습니다.(cat2.gif 사용 ) 왼쪽과오른쪽고양이는각각다른스프라이트입니다. 왼쪽의고양이가말을걸면잠시후에오른쪽의고양이가대답을합니다. 제어카테고리에있는 ' 방송하기 ' 블록을이용하여두스프라이트가말을주고받을수있도록합시다. w,a,s,d 키를누르면각각키에따라왼쪽고양이가다른말을하고이말에따라오른쪽고양이도각각다른대답을할수있도록스크립트를만들어봅니다. 5. 고양이들의대화 소리내기 : 고양이들의대화가완성되었다면말풍선이생길때마다고양이울음이나오도록합시다. 프로젝트메뉴의 소리 목차를클릭하여왼쪽스프라이트에는 Kitten.wav 파일을로드하여울음소리로사용하고오른쪽스프라이트에는 Meow.wav 파일을로드하여울음소리로사용합니다. -35-
36 1 장로킷블록사용하기 03 변수와반복그리고조건 -36-

37 변수란? 변수란값이변하는수를말합니다. 말그대로지금의값을다른값으로마음대로바꿀수있다는것이변수입니다. 변수를사용하려면먼저이름을지어야하며이런이름들을명칭이라고합니다. 스크래치자체에서도변수블록을생성할수있으며명칭을직접만들어사용할수있습니다. 변수를왜사용해야하나요? 이미지의동작도숫자의변화에의해변화되며, 로봇, 드론의모든값들도숫자의값으로움직입니다. 그리고센서의값들도감지된정도에따라변화하는속성을가지고있습니다. 이러한모든것을위해서변수를사용하여야합니다. Sum 이라는변수를만들고변수의값을바꾸는예 -37-
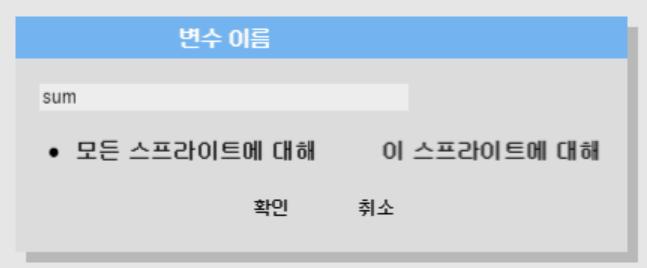

38 변수블록만들기 변수블록탭을클릭하여변수만들기버튼을누르고원하는변수이름을적어줍니다. 여기서는 SUM 이라는변수를만들어보겠습니다. -38-


39 변수블록만들기 따라해봅시다 - 키보드로숫자변수증감시키기 햇블록두개를드래그합니다. 변수블록으로들어가해당블록을놓아준후 1,-1 을각각넣어주세요. -39-
")

40 변수블록만들기 햇블록두개를드래그합니다. 도움말 : 값에대한정확한모니터링 (monitoring) 은스테이지의변수값컨트롤보다말풍선으로확인하는것이좋습니다. 값을줄일때에는 부호를붙여야합니다. 형태블록에서위와같이블록아래에놓아줍니다. -40-


41 변수블록만들기 4 번에준비했던 SUM 변수를안녕안에넣어줍니다. 제어블록에서위와같이놓아주세요. -41-
42 변수블록만들기 실행해봅시다 - 키보드로숫자변수증감시키기 이제키를눌러서숫자를증가및감소시켜보세요. -42-


43 유한 ( 조건 ) 반복블록사용하기 무한반복과유사하지만, 조건이있기떄문에조건을만족하지못하면반복문밖으로나가버리는차이가있습니다. 다음따라해보기를통해유한반복블록의용도를알아봅시다. 따라해봅시다 - 반복블록을사용하여왕복운동하기 스프라이트를클릭했을때유한반복을사용하여앞으로뒤로왕복운동하는스프라이트를만들어봅시다. 제어블록에서위와같이놓아주세요. 동작으로들어가동작블록을놓아줍니다. -43-


44 유한 ( 조건 ) 반복블록사용하기 제어블록에서아래와같이놓아주세요. 대기할수있는기다리기블록을놓아줍니다. -44-



45 유한 ( 조건 ) 반복블록사용하기 유한반복블록에넣어준후 90 도회전과 1 초기다리기블록을뒤에붙여줍니다. 실행해봅시다 - 반복블록을사용하여왕복운동하기 스프라이트를클릭하여실행시켜보세요. -45-

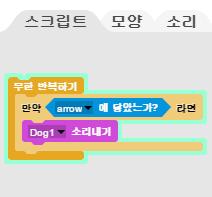
46 조건 (IF) 블록사용하기 조건블록은프로그램에서가장중요한판단을하는기능을가진블록입니다. 추후지능로봇이나판단하는프로그램을위해필요합니다. 다음따라해보기를통해조건블록을익혀보십시요. 따라해봅시다 - 스프라이트크기증가후돌아오기 스프라이트를클릭했을때마다스프라이트의크기가조금씩커지도록스크립트를작성해봅시다. 만약점점커지다가크기가 2 배가넘게되면원상태로줄어들어야합니다. ( 처음스프라이트를로드한경우의크기는 100% 입니다.) 제어블록에서위와같이놓아주세요. -46-



47 조건 (IF) 블록사용하기 만약, 아니면이라는조건블록을붙여넣습니다. 연산으로들어가해당부등호연산을넣어줍니다. -47-


48 조건 (IF) 블록사용하기 형태로들어가서아래의블록을넣어주세요. 따라해봅시다 - 스프라이트크기증가후돌아오기 이제화살표를눌러화살표의크기를키워보세요. 도움말 : 크기가 200%( 두배 ) 이상넘는것을막기위해서연산카테고리의부등호블록을사용하였습니다. 현재스프라이트의크기를알려주는 크기 리포터블록은형태카테고리에서발견할수있습니다. 스크립트를보면스프라이트를클릭할때마다 10% 씩커짐을알수있습니다. -48-

49 연산블록 ( 부등호와반올림 ) 사용하기 스프라이트를클릭했을때마다스프라이트의크기가조금씩커지는범위를부등호에서바꿔보고반올림블록에대하여알아봅시다. 따라해봅시다 - 부등호의범위지정및반올림사용 부등호옆의숫자크기에따라스프라이트의크기가점점늘어나는것을알수있습니다. 반올림은안에숫자가소수점일때반올림해주는기능의블록을말합니다. -49-
 은스테이지의변수값컨트롤보다말풍선으로확인하는것이좋습니다. 값을줄일때에는 부호를붙여야합니다. 2. 키보드로조건반복회전시키기 : 프로젝트메뉴의 모양 을클릭해서 twinarrow.png 를스프라이트로사용합니다.")
50 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 실습해봅시다 1. 변수블록을이용한말풍선컨트롤 : 변수카테고리에서 sum 이라는변수를만듭니다. 키보드의 w 키를누르면 sum 이 1 씩증가하고 s 키를누르면 1 씩감소하게해봅시다. 이때변수값은스프라이트의말풍선으로표시해주세요. 도움말 : 값에대한정확한모니터링 (monitoring) 은스테이지의변수값컨트롤보다말풍선으로확인하는것이좋습니다. 값을줄일때에는 부호를붙여야합니다. 2. 키보드로조건반복회전시키기 : 프로젝트메뉴의 모양 을클릭해서 twinarrow.png 를스프라이트로사용합니다. 이스프라이트를왼쪽화살표키를눌렀을때에는왼쪽으로서서히 90 도만큼회전시키고오른쪽화살표키를눌렀을때에는오른쪽으로서서히 90 도회전할수있도록합시다. twinarrow.png 도움말 : 예제에서는 5 도씩회전하므로 18 번반복해서 90 도만큼회전하였습니다. 반복횟수와회전각도를조절하면좀더빠르게돌거나느리게돌게할수있을것입니다. -50-

51 실습해봅시다 3. 변수를이용한스프라이트의크기변경 : 스프라이트를클릭했을때마다스프라이트의크기가조금씩커지도록스크립트를작성해봅시다. 만약점점커지다가크기가 2 배가넘게되면원상태로줄어들어야합니다. ( 처음스프라이트를로드한경우의크기는 100% 입니다.) 도움말 : 크기가 200%( 두배 ) 이상넘는것을막기위해서연산카테고리의부등호블록을사용하였습니다. 현재스프라이트의크기를알려주는 크기 리포터블록은형태카테고리에서발견할수있습니다. 스크립트를보면스프라이트를클릭할때마다 10% 씩커짐을알수있습니다. 4. 움직이는공멈추게하기 : 공모양의스프라이트가스테이지이곳저곳을빠르게왔다갔다합니다. 이때마우스포인터로빠르게움직이는공을잡을수있도록합니다. 마우스포인터와공모양의스프라이트가만나면잠시멈추게함으로공을잡은효과를낼수있도록합니다. greenball.png 도움말 : 조건블록에관찰카테고리의 ~ 에닿았는가 블록을결합하였습니다. 마우스포인터와스프라이트가만났다면 1 초동안공의움직임을멈추게해줍니다. -51-
 이변수값들을 0 으로초기화합니다. 2) 조건문에 마우스를클릭했는가? 블록을결합하여마우스를클릭했는지를검사하고 3) 클릭이되었으면마우스의좌표값을변수에넣어줍니다. 이때마우스의좌표값은소수점자리까지계산되어나오므로연산카테고리의반올림블록을이용하여정수로나타내주었습니다.")
52 실습해봅시다 5. 좌표값나타나게하기 : 마우스로스테이지이곳저곳을클릭하면 X 좌표와 Y 좌표값이스테이지변수컨트롤에나타나게하여봅시다 도움말 : 스테이지좌표값을얻기위해서는먼저 X 와 Y 좌표값을저장할변수를만들어줍니다. 이후다음과같은단계가필요합니다. 1) 이변수값들을 0 으로초기화합니다. 2) 조건문에 마우스를클릭했는가? 블록을결합하여마우스를클릭했는지를검사하고 3) 클릭이되었으면마우스의좌표값을변수에넣어줍니다. 이때마우스의좌표값은소수점자리까지계산되어나오므로연산카테고리의반올림블록을이용하여정수로나타내주었습니다. -52-

53 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 1. 아래리포터블록들은어떤특정한값들을변수에저장해주는역할을합니다. 블록들마다어떤값을저장하고있는지조사하여보고이값들을정수형으로표현하고자할때반올림블록에결합할필요가없는블록은어떤것들이있는지확인해보세요. 리포터블록종류값의의미반올림블록필요유무 2. 스프라이트가마우스포인터를따라이동하도록스크립트를작성합니다. 이때마우스를클릭하면스프라이트가 50% 정도부풀어오르고그렇지않은경우에는원상태로돌아오도록합니다. 마우스포인터가스테이지의범위를넘어가면스프라이트는스테이지의벽근처에머물러있고더이상따라가거나사라져서는안됩니다. -53-

54 연습문제 3. 각각두개의스프라이트를만든후 twinarrow.png 와 twinarrow2.png 파일을사용하여옆그림과같이스프라이트를배치해줍니다. 파란색화살표는첫번째스프라이트이고주황색화살표는두번째스프라이트입니다. 스페이스키를한번누를때마다파란색화살표가 360 도회전하고나면주황색화살표가 6 도씩회전하여시계의분침과초침역할을하게스크립트를작성합시다. 4. 스테이지안에서스프라이트가제자리에서회전을합니다. 회전방향은동일합니다. 키보드의왼쪽방향키를누르면회전속도가느려지고오른쪽방향키를누르면회전속도가빨라지도록해봅시다. 햇블록대신조건블록을사용하도록하며회전각도의크기로속도를조절할경우각도값이 0 보다작아지지않도록유의합니다. -54-
55 연습문제 5. 키보드의방향키를사용하여스프라이트를스테이지내에서위아래와왼쪽오른쪽으로자유롭게조종할수있도록합시다. 햇블록은사용할수없으며조건문을사용하여스크립트를작성해야합니다. 스크립트를실행하고난후에햇블록을사용했을때와조건문을사용했을때어떤차이가있는지이야기해봅시다. -55-
56 1 장로킷블록사용하기 04 그림그리기와스프라이트조종하기 -56-
 그림을그릴때사용하는색상선택하기 펜의색을입력한수로정하기 펜의음영 ( 명암 ) 을입력한수만큼정하기 펜의굵기를입력한수만큼정하기 펜으로그림을그리지않기위해펜올리기지정하기 펜의색을입력한수만큼바꾸기 펜의음영 ( 명암 ) 을입력한수만큼바꾸기 펜의굵기를입력한수만큼바꾸기")
57 펜블록사용하기 펜블록은선이나도형등의그래픽을그릴수있는열한개의코드블록으로구성되어있습니다. Rokitbrick 프로그램에서그림을그릴때는그림판을이용하거나펜블록을이용하는두가지방법이있습니다. 그림판에서그린그림및그래픽은스프라이트나배경그림을그릴때사용하지만, 펜블록을이용한그림은무대에서스프라이트가그림을그리게하는방법입니다. 펜으로그린그림, 스탬프지우기 그림을그리기위해펜내리기지정하기 ( 그리기허용 ) 그림을그릴때사용하는색상선택하기 펜의색을입력한수로정하기 펜의음영 ( 명암 ) 을입력한수만큼정하기 펜의굵기를입력한수만큼정하기 펜으로그림을그리지않기위해펜올리기지정하기 펜의색을입력한수만큼바꾸기 펜의음영 ( 명암 ) 을입력한수만큼바꾸기 펜의굵기를입력한수만큼바꾸기 스프라이트이미지를그리거나찍기 ( 복사하여붙이기 ) -57-



58 펜의색과두께정하기 펜의색상정하기 펜색깔을선택합니다. 펜색깔을지정한수만큼바꿉니다. 펜색깔을지정한수의값으로정합니다. 클릭 펜색깔정하기블록에서부분을클릭하면나타나는무지개색의색상팔레트에마우스포인트를이동하여색을선택할수있습니다. 스크립트를만들어무대위에서스프라이트가선을그리며이동하는지확인해봅시다. -58-


59 펜의색과두께정하기 펜의두께정하기 안에지정한수만큼펜의굵기를바꿉니다. 안에지정한수로펜의굵기를정합니다. 펜의굵기를 5 와 10, 30 으로지정하였을때의크기를나타낸예입니다. -59-


60 관찰블록사용하여스프라이트충돌판단하기 실제애니메이션에서사물의충돌이나여러가지상황에서시점을확인할때유용한블록이관찰블록입니다. -60-

61 관찰블록사용하여색감지하기 < 라임색공클릭시 > < 빨간색공클릭시 > < 화살표클릭시 > 자신이정의한색깔이스크립트에서작용하도록색을감지할수있습니다. 마우스커서를각색깔공에가져다놓으면스크립트의색깔을감지하게됩니다. -61-
62 스테이지그림가져오기 자신이원하는배경을무대에두고실제환경처럼활용할수있습니다. 파일을클릭합니다. Stage 를클릭합니다. Backgrounds 를클릭합니다. Bedroom1 을클릭합니다. 무대에배경이미지가나타납니다. -62-


63 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 실습해봅시다 1. 스프라이트펜으로네모그려보기 : 펜카테고리에있는블록을사용하여스프라이트의펜을내려서네모를그려봅시다. 선의색이스테이지의바탕색 ( 하얀색 ) 과같으면잘보이지않을수있으니바탕과잘구분될수있는색을사용합시다. 도움말 : 왼쪽과오른쪽스크립트모두네모를그릴수있지만오른쪽처럼반복문을사용하여작성하는것이좋습니다. 먼저펜을내려야만선이그려질수있음을잊지마세요! 2. 마우스포인터따라선그리기 : 마우스포인터가스테이지에서움직이면마우스포인터에따라선이그려질수있도록스크립트를작성해봅시다. -63-



64 실습해봅시다 3. 스프라이트튕겨보기 : 스프라이트만들기버튼을눌러스프라이트를한개더추가합니다. 아래그림처럼스프라이트를구성합니다. 첫번째스프라이트는공모양이고두번째는캐릭터형태입니다. 두번째스프라이트는이름을첫번째와구분하기위해서이름을바꾸어줍니다. 공모양의스프라이트는스테이지를자유롭게움직이지만스테이지의벽너머로나가서는안되며두번째스프라이트에부딪칠때에는반사되어다른곳으로튀어나가야합니다. 이동작을계속할수있도록스크립트를작성해봅니다. 첫번째스프라이트 두번째스프라이트이름바꾸기 ( 스프라이트 -> roi) 도움말 : 첫번째스프라이트만스크립트를넣습니다. 두번째스프라이트는그냥멈추어있기만하면되므로따로스프라이트를작성하지않아도됩니다. 관찰카테고리에서스프라이트가서로충돌하는지여부를알려주는 ~ 에닿았는가 블록을사용하여스프라이트끼리충돌이일어났는지검사합니다. 이때블록에있는팝업목록에서스프라이트이름을선택해서넣어줍니다. -64-


65 실습해봅시다 4. 마우스포인터로롤오버말풍선만들기 : 무대버튼을클릭하고아래와같은배경그림 (bedroom2.gif) 을가져옵니다. 스프라이트는마우스포인터처럼마우스의움직임에따라스테이지이곳저곳을이동합니다. 이때스프라이트가배경에있는물체에머무르면말풍선으로아래와같은메시지들이나타나도록스크립트를작성해봅시다. This is window This is bed This is furniture This is floor 도움말 : 실제그림에있는물체를식별하는것이아니라그림에있는물체들의색이무엇인지판단해서메시지를띄웁니다. 따라서다른물체들이라할지라도색이같다면같은메시지가나타날수있습니다. -65-
 스프라이트는마우스의움직임을따라스테이지하단에서좌우로움직입니다. 또한검은선모양의스프라이트는스테이지하단에위치하며공이이선을만나면게임이끝나게됩니다.")
66 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 1. 옆의그림에서처럼마우스의움직임에따라선이그려지는스크립트를작성하여봅시다. 마우스가여기저기움직이면중심으로부터마우스좌표까지계속해서선이그려지도록합니다. 2. 테니스게임 - 스프라이트만들기버튼을눌러서 3 개의스프라이트를만든후첫번째스프라이트부터각각아래그림파일들을로드합니다. 검은선모양의스프라이트는스테이지화면맨아래에위치하고공을막아내는블로커 (blocker) 스프라이트는마우스의움직임을따라스테이지하단에서좌우로움직입니다. 또한검은선모양의스프라이트는스테이지하단에위치하며공이이선을만나면게임이끝나게됩니다. 공은벽이나블로커를만나면튕기게합시다.. redball.png blocker.png blackbar.png -66-


67 연습문제 3. 색깔건반 스프라이트만들기버튼을클릭하여 2 개의스프라이트를만든후둘중하나의스프라이트에는다양한색의사각형들이그려져있는옆의파일을로드합니다. 이후마우스포인터를이사각형들에갖다댄후마우스를클릭하면각색깔마다다른음을연주할수있도록합시다. colors.png 4. 한붓그리기 키보드의화살표키를사용하여스프라이트를이동시키면스프라이트가움직인경로를따라선이그려지도록스크립트를작성해봅시다. 이때스프라이트는아래그림처럼삼각형모양의화살표를사용하도록하고이화살표의방향은화살표키의방향과일치할수있도록합시다. angle.png -67-
68 2 장로킷시뮬레이터 01 인벤터보드시뮬레이션 -68-




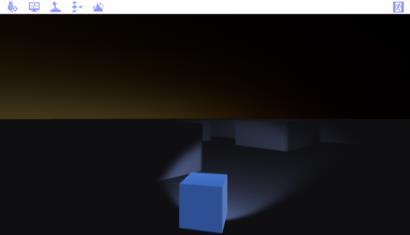
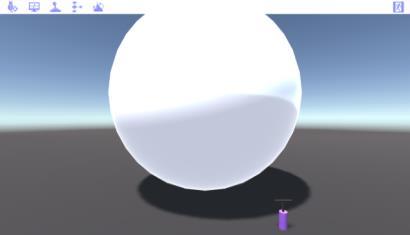


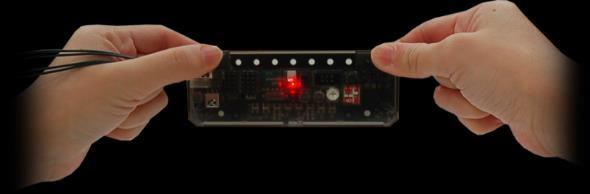
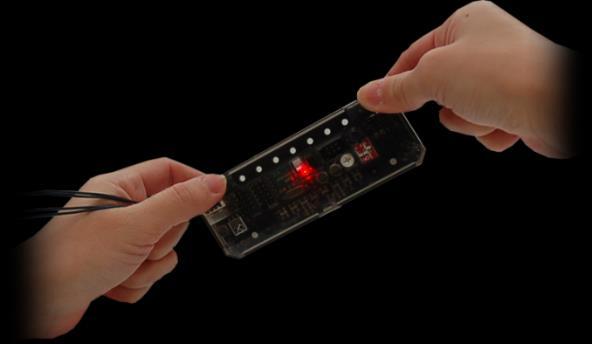
69 인벤터보드시뮬레이션 ROKIT Simulator 인벤터보드와 PC 간의다양한콘텐츠를통해로봇, 드론, 게임등을 USER 가원하는대로제어하고 SW 를이해할수재미있게이해할수있는 SW 프로그램입니다. 양옆아날로그 IR 센서사용 양옆아날로그 IR 센서사용 뒷면디지털 IR 센서사용 양옆아날로그 IR 센서로방향결정 뒷면중앙센서처음위치로앞쪽 IR 센서로자율비행훈련 뒷면 IR 중앙 3 개중심 로봇청소기세팅하기 미션 Q. 누가안떨어트리고움직이며오래견디나? -69-

70 인벤터보드시뮬레이션 ROKIT smart inventor board 인벤터보드는 IR 센서, 부저, LED, 모터와통신제어모듈등이모두내장된응용확장가능한 HW 입니다. 스크래치, 아두이노, Unity 3D 와접목하여다양한기능을수행해내는전자장치입니다. -70-

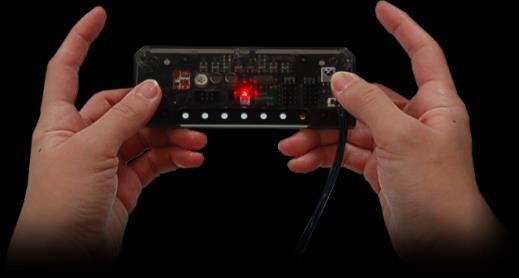
71 인벤터보드시뮬레이션 구성품과인벤터보드의설치 인벤터보드와 PC 를셋팅및연결하는방법을알아보도록합시다. Inventor Board Downloader Cable Downloader USB Cable < 연결에필요한구성품들 > 1. Inventor Board 와컴퓨터를연결합니다. (Inventor Board UART 에 Board Cable 연결 ) -71-


72 인벤터보드시뮬레이션 PC 와하드웨어연결 PC 와인벤터보드다음과같이통신케이블로연결되어야합니다. 연결후드라이버를설치및확인합니다. 2. Downloader 와 Downloader Cable 을연결합니다. 3. Downloader 와 USB Cable 을연결합니다. 4. Inventor Board 와컴퓨터를연결합니다. (Inventor Board UART 에 Board Cable 연결 ) -72-

73 인벤터보드시뮬레이션 데이터모니터링 인벤터보드에는수많은센서와 LED 모듈들이내장되어있습니다. 이값을통해로봇제어보드의원리와용도를정확히이해하고활용할수있게됩니다. -73-

74 인벤터보드시뮬레이션 데이터모니터링 : 디지털 IR 센서입력 디지털신호란 0 또는 1 과같은연속되지않는두개의숫자로정보를생성하는것을뜻합니다. 보드뒷면의 7 개디지털 IR 센서 감지시에앞면의 8 개의 LED 로확인할수있으며밑면가운데센서가앞면의 3,4 번 LED 두개와연결되어있는것이특징입니다. -74-
 IR 센서보정값 (0~1023) IR 센서실제값 IR 센서가용범위 디지털로사용시 1: On/ 0 : Off 경계값미리보기조절바.")
75 인벤터보드시뮬레이션 데이터모니터링 : 아날로그 IR 센서입력 아날로그신호란끊김없이계속적으로이어지는숫자시스템으로보통전자에서는 (0~1023) 의값을갖고, 디지털이 1 과 0 으로만이어져있는것과차이점이있습니다. IR 센서이외에도가변저항이나초음파센서등입력을아날로그로받는것들이모두해당됩니다.IR 센서보정값 (0 1023) IR 센서보정값 (0~1023) IR 센서실제값 IR 센서가용범위 디지털로사용시 1: On/ 0 : Off 경계값미리보기조절바. 마우스로드래그하여원하는경계값을확인할수있습니다. -75-




76 인벤터보드시뮬레이션 데이터모니터링 : LED, 출력 인벤터보드에내장된 LED 와추가로외부에연결된출력모듈을제어할수있습니다. 외부 LED 및출력모듈을연결하고 On/Off 제어 7 개의 LED On/Off 제어 소리나 LED,7-Segment 와같은출력모듈을제어가능합니다. -76-



77 인벤터보드시뮬레이션 데이터모니터링 : DC 모터 DC 모터란? 바퀴와같이회전하는모터로, 속도와방향으로다양한구동이되는모터입니다. 슬라이더바의눈금에따라속도와방향이결정됩니다. stop M1 CCW CW M1 (Motor 1) M2 M2 (Motor 2) -77-

78 인벤터보드와핀맵 핀맵 핀맵이란제어보드의핀에대한정보를한눈에알아볼수있도록작성된그림이나문서를말합니다. 이것은특히소프트웨어코딩을할때에큰도움이됩니다. 핀맵의필요성 제어보드로소프트웨어코딩을하기위해서는제어보드에대한기초지식이필요합니다. 이러한정보는방대하고어렵기때문에배우기에매우까다롭습니다. 이러한어려움을해결하고자, 제어보드의정보를알아보기쉽게표시한핀맵을만들게되었습니다. -78-
79 인벤터보드와핀맵 핀맵사용하기 핀맵은다음과같이구성되어있습니다. 핀의기능이나용도 핀의번호 핀의번호 는코딩중에해당하는핀을제어해야하는경우사용합니다. 11번부터 18번까지의핀의경우핀의기능이나용도를보면 LEDDisplay 라는것을알수있듯, 각핀의기능을알수있습니다. 이처럼핀맵에적혀있는번호와용도를가지고실제 S/W 코딩에활용할수있습니다. -79-

80 인벤터보드와아날로그센서 아날로그값블록의사용 (1) 스마트인벤터보드의앞면 3 개의센서에물체나손을감지하면제어기는감지상태에따라 0 에서부터 1023 사이의값으로표현합니다. 물체가센서에가까이있으면 0 에가까운값을출력하고, 물체가멀리있으면 1023 에가까운값을출력합니다. 이처럼센서의감지상태에따라제어기가연속적인값을출력하는것을아날로그값출력이라합니다. 아날로그출력이가능한핀은 19 번부터 26 번까지이며, 보드전방의세개센서는아래그림처럼 19 번부터 21 번핀에연결되어있습니다. 가운데센서 왼쪽센서 오른쪽센서 -80-
 또한아래와같이스크립팅하는방법도있습니다. 변수를만든후아날로그값을저장한다음말하기블록을사용하여변숫값을나타내줍니다.")
81 로킷브릭 : 아날로그값블록 아날로그값블록의사용 (2) 아래와같이아날로그값블록의핀값을 20 번으로한후단순히블록을클릭해주면말풍선으로센서값이출력됩니다. ( 제어기와로킷브릭이먼저연결되어있어야합니다 ) 또한아래와같이스크립팅하는방법도있습니다. 변수를만든후아날로그값을저장한다음말하기블록을사용하여변숫값을나타내줍니다. 이렇게하면계속해서센서의값이스프라이트말풍선으로출력됩니다. -81-

82 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 실습해봅시다 1. 센서감지시켜보기 : 스마트인벤터보드앞부분에있는가운데센서 (20 번 ) 값을계속해서스프라이트의말풍선으로나타날수있도록스크립트를작성합니다. 작성한스크립트를실행한후이센서에손이나물체를감지시켜봅시다. 도움말 : 아날로그값읽기 블록을말하기블록과결합하여사용하였습니다. 무한반복을해야계속현재값이보여질수있습니다. 이예제에서는변수블록을사용하지않았다는것에유의하세요. 2. 스테이지에센서값표시하기 : 스마트인벤터보드앞부분에있는센서 3 개값을스테이지에표시하고 3 개의센서들에손이나물체를감지시켜봅시다. 도움말 : 먼저 3 개의센서값을저장할수있는변수 3 개를만들어줍니다. 이 3 개의변수에무한반복블록을사용하여계속센서값들을읽어들입니다. -82-
83 실습해봅시다 3. 센서값으로캐릭터움직이기 : 스마트인벤터보드의앞부분가운데센서를손으로감지할때마다스테이지에있는캐릭터가튀어오르게해보세요. 손을떼면다시원래자리로돌아와야합니다. 도움말 : 센서값이 100 보다작아지면스프라이트가움직이는것으로하였습니다. 이값은주위환경의밝기에따라달라질수있으므로직접값을검사해보는것이좋습니다. 센서값을검사하는가장편한방법으로는다른블록과결합되지않은 아날로그값읽기 블록을클릭해보는것입니다. 이렇게하면작은말풍선으로클릭한순간의센서값이표시됩니다. -83-
84 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 1. 스마트인벤터보드의앞부분가운데센서를감지하면미사일이발사되듯이스프라이트가스테이지의아래쪽에서위로빠르게올라갈수있도록스크립트를작성해봅시다. 2. 스테이지에캐릭터스프라이트를불러옵니다. 스마트인벤터보드의앞면왼쪽센서를감지하면스프라이트가왼쪽으로이동하고오른쪽센서를감지하면오른쪽으로이동하며가운데센서를감지하면점프하는효과를만들수있도록스크립트를작성해봅시다. -84-
.")
85 연습문제 3. 스마트인벤터보드의앞쪽에있는세개의센서중가운데센서값을감지하면스테이지에센서값을막대그래프의길이로나타내어주는스크립트를작성해보세요. 4. 스테이지에아래그림처럼인벤터보드의앞부분에있는 3 개의센서마다말풍선으로계속센서값이출력되도록합시다 (smartinventor.png 사용 ). 만약변수를사용할경우사용자의혼동이없도록스테이지의변수컨트롤은보이지않게해주세요
86 2 장로킷시뮬레이터 02 게임시뮬레이션 -86-


87 게임시뮬레이션 게임시뮬레이션기능 : 응용컨트롤 인벤터보드를이용한시뮬레이션게임을통해센서와보드의기능을자연스럽게이해할수있습니다. 버튼을클릭하면아래로풀다운메뉴가나타나며해당컨트롤화면으로이동할수있습니다. -87-



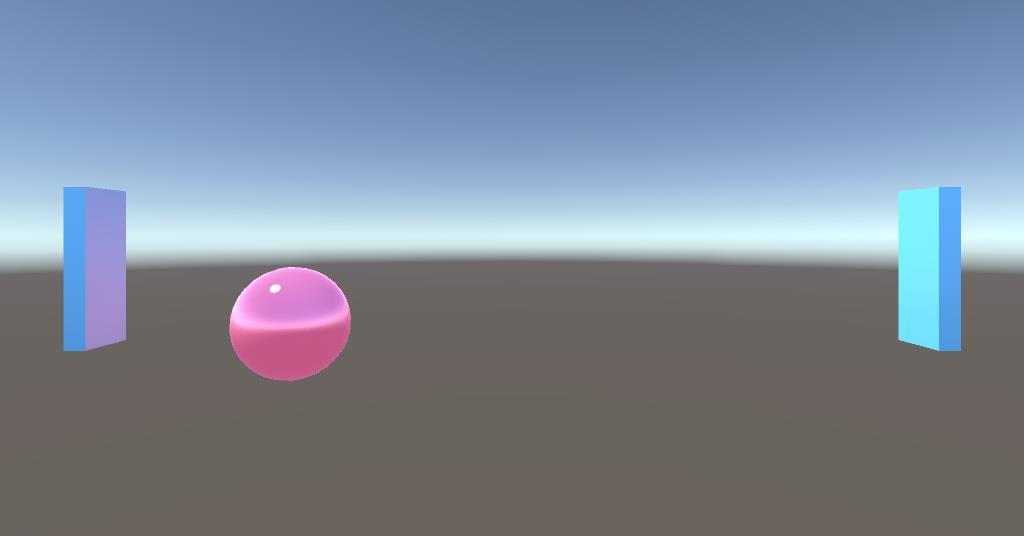
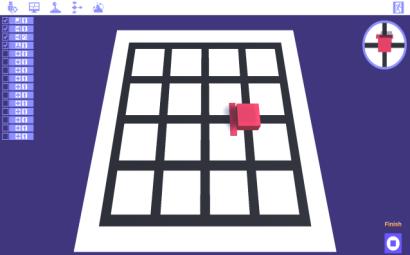
88 게임시뮬레이션 게임시뮬레이션기능 : 공막기 좌우 IR 센서를사용하여아날로그방식으로양쪽벽면을움직여공이나가지못하게합니다. IR 센서를가리는거리에따라 벽의높이가달라집니다. 중앙 IR 센서를잠시 막고있으면공이리셋됩니다. -88-


89 게임시뮬레이션 게임시뮬레이션기능 : 전투기 좌우 IR 센서를사용하여디지털방식으로비행기를좌우로움직여볼을파괴합니다. 비행기의위치는좌우 5 단계의정해진트랙으로이동합니다. 아날로그센서지만일정범위를기준으로디지털 On/Off 로작동한다. -89-

 를이용하여표창을던진다.")

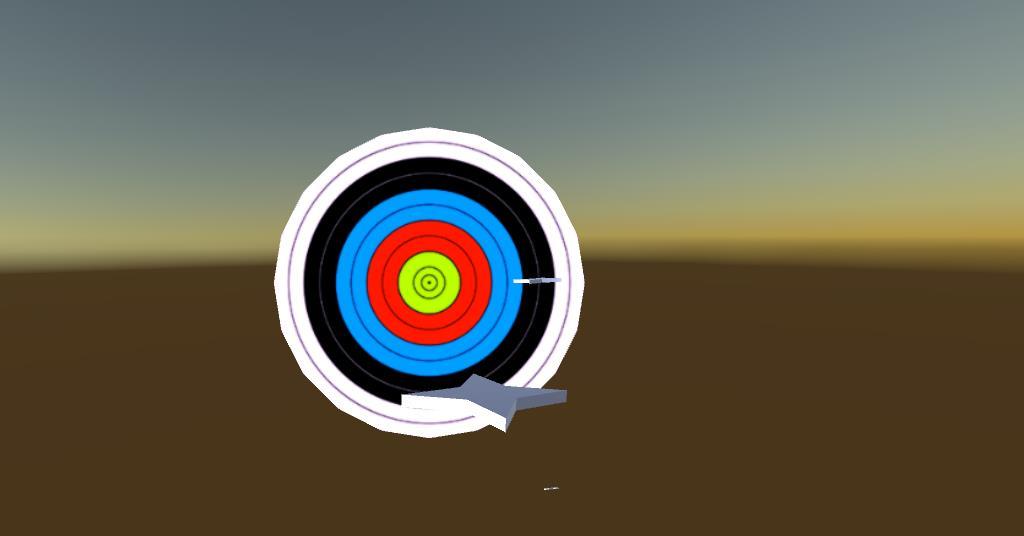
90 게임시뮬레이션 게임시뮬레이션기능 : 수리검 하단중앙 5 개의 IR 센서 ( 양끝단센서는사용하지않음 ) 를이용하여표창을던진다. 손가락으로센서들을순차로가려주면각센서간의입력시간을속도로바꾸어계산한다. 보드를뒤집어잡고빠르지않은적당한속도로수리검을던지듯손가락을밀어낸다. -90-

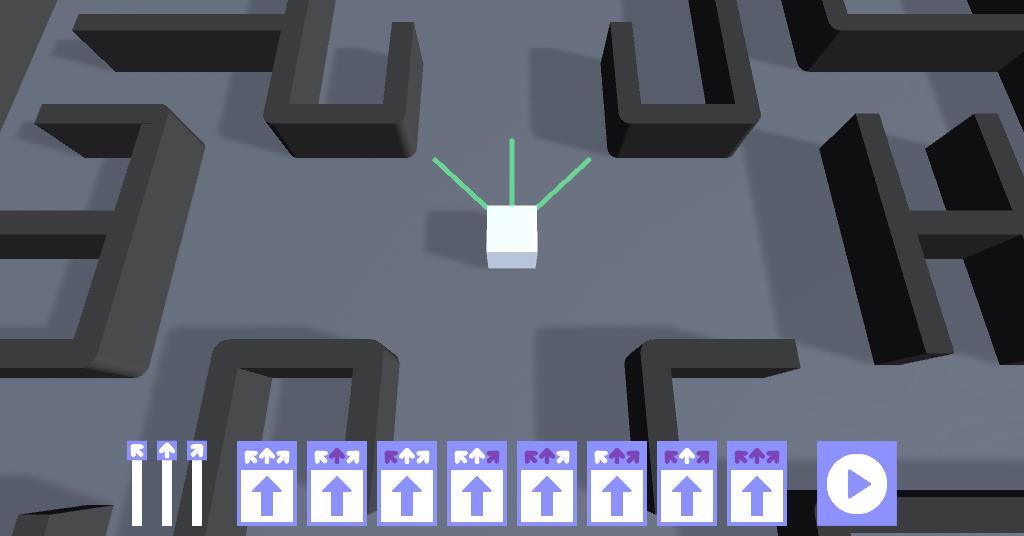
91 게임시뮬레이션 게임시뮬레이션기능 : 미로 좌우 IR 센서의조합만으로로봇을움직여미로를탐험합니다. 2 의 2 제곱으로총 4 개지상태를만들어낼수있습니다. 센서를모두가리지않으면전진양쪽두센서를모두가리면후진왼쪽센서를가리면좌회전오른쪽센서를가리면우회전 -91-




92 게임시뮬레이션 게임시뮬레이션기능 : 펌프 하단중앙 5 개의디지털 IR 센서 ( 양끝단센서는사용하지않음 ) 를이용하여펌프를움직인다. 손가락으로센서들을왕복하며가려주면각센서간의입력위치에따라펌프도같은위치로움직인다. 왼쪽손가락을가로로세워디지털센서에대고오른손으로보드를수직으로잡고펌프질하듯상하로움직여준다. -92-






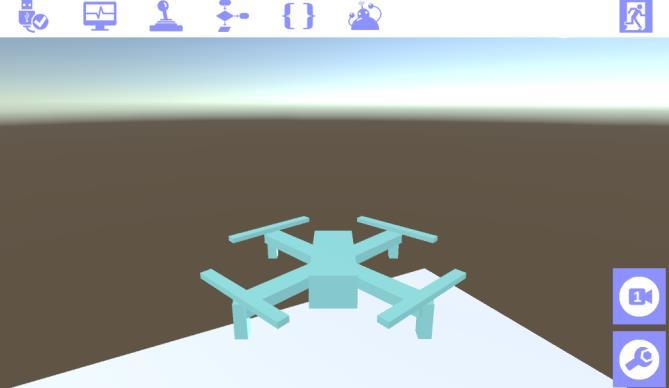
93 게임시뮬레이션 게임시뮬레이션기능 : 드론 보드의좌우, 중앙 IR 센서와양쪽끝두개의디지털센서를사용하여드론을조종합니다. 보드의중앙 IR 센서가바닥을볼수있게아랫쪽으로향하도록보드를잡고바닥과의높이를변경하여드론의상승하강을조종한다. 이상태에서보드를좌우로기울여양쪽 IR 센서가바닥과의거리를인식해드론이좌우로움직일수있게한다. 뒷면양쪽끝두개의디지털센서는각각전진후진을담당한다. 중앙의디지털센서는멀리이동한드론을다시제자리로돌아오게하는역할을한다. -93-
94 인벤터보드와디지털센서 ( 출력 ) 디지털핀의출력 디지털출력이란한마디로 On( 켜짐 ), Off( 꺼짐 ) 이렇게두가지신호만으로표현하는것을의미합니다. 스마트인벤터보드에서디지털출력을잘보여주는장치는전면 8 개의 LED 디스플레이입니다. 아래그림처럼 11 번부터 18 번까지의핀이 LED 디스플레이를제어하는데사용됩니다. -94-
95 로킷브릭 : 디지털값블록 ( 출력 ) 디지털값블록의사용 디지털블록은핀번호를입력하도록합니다. 핀번호입력사용할핀번호를입력합니다. 참, 거짓설정 지정한핀에논리신호인참 (HIGH) 와거짓 (LOW) 신호를보냅니다. 참 블록과 거짓 블록은연산팔레트에서얻을수있습니다. 해당하는핀을켭니다. 해당하는핀을끕니다. 설정값에따라해당하는핀의상태가달라집니다. 11 번핀인첫번째 LED 가켜지거나꺼지는블록의예제입니다. -95-

96 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 실습해봅시다 1. LED 점멸시키기 : 스마트인벤터보드의 LED 장치들중 11 번과 18 번에동시에불이들어와서 1 초간격으로깜빡일수있도록스크립트를작성해봅시다. 도움말 : ~ 초기다리기 블록의값을조절하면깜빡이는주기가변화하게됩니다. 시간을변화시켜서다양한주기를만들어봅시다. -96-

97 실습해봅시다 2. LED 모두켜기 : 스마트인벤터보드의앞부분에있는가운데센서를감지했을때 8 개의 LED 가모두켜지게해봅시다. 감지되지않은경우에는 8 개의 LED 가전부꺼지게합니다. 도움말 : 조건블록을사용해서센서가감지되었는지알아봅니다. < 조건 > 센서값이 100 보다작아지면 LED 를모두켭니다. 이때왼쪽스크립트처럼반복문을사용하면더짧은스크립트로만들수있습니다. 단, 디지털핀의번호에도변수를사용하여바꿔줘야하는것에유의합니다. -97-

98 실습해봅시다 3. LED 켰다끄기 : 스마트인벤터보드의 8 개 LED 를왼쪽부터 0.1 초간격을주어차례대로불을켭니다. 8 개의 LED 가전부켜지면, 그즉시모두꺼지고다시처음과같은동작을반복하게하여봅시다. 도움말 : 왼쪽과오른쪽은서로동일한결과를만들지만반복문과변수를사용하여스크립트를좀더짧게만들수있습니다. 왼쪽에있는스크립트에서는핀번호를직접입력하지않고 'led' 라는변수블록을만들어디지털핀블록에결합하였습니다. 그리고이변수블록의값을 1 씩증가시켜 LED 를제어하였습니다. -98-
99 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 1. 스마트인벤터보드의앞부분에있는세개의센서를사용합니다. 왼쪽센서를감지하면가장왼쪽에있는 LED 가켜지고가운데센서를감지하면가운데있는두개의 LED 가켜지며오른쪽센서를감지하면가장오른쪽에있는 LED 가켜질수있게해봅시다. 2. LED 에니메이션 : 스마트인벤터보드의 LED 불빛이왼쪽부터오른쪽으로순서대로켜진후, 다시오른쪽부터왼쪽으로켜지는동작을계속반복할수있게스크립트를작성해보세요. -99-
100 연습문제 3. 스테이지버튼으로 LED 제어 : 스테이지에아래와같은세개의사각형이있습니다. 사각형들을마우스로클릭하면사각형의색이파랗게변하는동시에스마트인벤터보드의 LED 가켜졌다가마우스버튼을떼면 LED 가다시꺼지게해봅시다. 맨왼쪽사각형을클릭하면맨왼쪽 LED 가켜지고가운데사각형을클릭하면가운데두개의 LED 가꺼지고오른쪽사각형을클릭하면맨오른쪽 LED 가켜지게해봅시다


101 연습문제 4. LED 로레벨표시 : 옆의그림과같이스테이지에슬라이더를구성합니다. 슬라이더의구성은아래와같습니다. 1 가운데레버는마우스를따라움직입니다. 그러나레버가양끝에위치하면마우스를따라움직이지않고멈추어있어야합니다. 2 옆그림처럼그림처럼레버가오른쪽으로움직이면움직인만큼 LED 불빛이늘어납니다. 다시레버가왼쪽으로움직이면움직인만큼 LED 불빛이줄어들게됩니다. 3 레벨미터에눈금이 7 개가표시되어있습니다. 각눈금과레버가만났을때 LED 불빛의변화가있습니다. 마우스의움직임에따라레버와 LED 가변화할수있게스크립트를작성해봅시다. Control1.png Control2.png Control3.png -101-
102 2 장로킷시뮬레이터 03 로봇구동시뮬레이션 -102-

103 로봇시뮬레이션 GUI 프로그래밍기능 간단한클릭만으로로봇의움직임을프로그래밍할수있습니다. 로봇이지능적으로움직일수있는논리를프로그래밍할수있는시뮬레이션이가능하며. 실제로봇이없어도로봇에대한기본개념과학습이가능합니다. 버튼을클릭하면아래로풀다운메뉴가나타나며해당프로그래밍화면으로이동할수있습니다

104 로봇시뮬레이션 미로탐험로봇 : 어보이더 1 전방에 2 개이상의물체감지센서를통해물체를감시함과동시에미로의길을지능적으로알아내는기능을손쉽게프로그래밍하고원리를학습할수있습니다. 장애물감지센서의감지상황에따라해당동작을지정하여로봇이미로를막힘없이누비고다닐수있도록프로그래밍합니다


105 로봇시뮬레이션 미로탐험로봇 : 어보이더 2 벽감지센서감도조절슬라이더 세개의슬라이더바를조절하여센서의감지거리를변경할수있습니다. 상황별동작지정버튼 센서의상황에따른해당버튼을클릭하면지정된동작을변경할수있으며, 우측의시작버튼을누르면센서상황에맞는동작을실행합니다

106 로봇시뮬레이션 라인트레이서 1 스마트보드의밑면에있는 7 개의적외선센서로 2cm 이내의연속된선을감지하여따라가는로봇을구현한시뮬레이션입니다. 미리입력된프로그래밍을통해구동되는로봇의시스템을알수있습니다. 로봇이처해있는교차로모양과그에따른동작을순차적으로지정하여원하는곳으로로봇을이동시킵니다

107 로봇시뮬레이션 라인트레이서 2 진행순서프로그래밍셀 상황별교차로상태와그에따른동작을각각클릭하여순차적으로작성합니다. 현재라인상황과동작패턴을잘생각해서해보도록합니다. 좌측의실행항목에체크하여실행할셀을활성화시킵니다. 시작버튼을눌러로봇을작동시킵니다

108 로봇시뮬레이션 추락방지로봇 : 스모로봇 1 바닥에세개의센서를이용하여낭떠러지를감지하고회피하는로봇을뜻합니다. 하얀바닥위에서구동하여야하는추락방지로봇의원리는청소기로봇에도그대로적용할수있습니다. 낭떠러지감지센서의감지상황에따라해당동작을지정하여로봇이패널위에서떨어지지않고자유롭게움직일수있도록프로그래밍해야합니다
109 로봇시뮬레이션 추락방지로봇 : 스모로봇 2 상황별동작지정버튼 센서의상황에따른해당버튼을클릭하면지정된동작을변경할수있습니다. 각버튼의좌측의슬라이더를사용하여해당동작의지속시간을변경할수있습니다.(0-1.0 초 ) 우측의시작버튼을누르면센서상황에맞는동작을실행합니다. 항상기본설정을모두마친다음, 시작버튼을눌러로봇을작동시키고, 동작을멈춘후에설정을바꿀수있습니다
110 인벤터보드와디지털센서 ( 입력 ) 디지털핀의입력 디지털입력이란제어기에연결된어떤장치나센서의상태를오직 On( 켜짐 ), Off( 꺼짐 ) 두가지값으로만표현하여입력되는것을의미합니다. 어떤장치나센서의상태가 0 에서부터 1023 까지의숫자의값으로표현되는아날로그입력값과는달리오직켜짐과꺼짐,0 과 1, 혹은참과거짓으로만표현됩니다. 스마트인벤터보드에서디지털핀입력을가장잘보여줄수있는장치는보드뒷면의 7 조센서와보드전면에부착된 3 개의딥스위치 (dipswitch) 입니다. 딥스위치 Bottom Side 7 조센서 로킷브릭에서접근할수있는디지털핀은딥스위치와연결된 8 번 ~ 10 번핀, 그리고 7 조센서와연결된 11 번 ~ 18 번핀등입니다. 이핀들은모두각각핀에연결된장치들의상태를 참 혹은 거짓 으로알려줍니다
111 로킷브릭 : 디지털값블록 ( 입력 ) 디지털값블록의사용 디지털핀의상태를알기위해서는로킷카테고리에서아래와같은블록을사용합니다. 블록에서알고싶은핀번호를선택한후블록을클릭만하더라도말풍선으로핀의상태를알려줍니다. 위와같이스크립트하면계속해서지정한핀값의상태를스프라이트의말풍선으로알려줍니다. 딥스위치값읽어오기 (1) 딥스위치의 1 번은 8 번핀, 2 번은 9 번핀, 3 번은 10 번핀과연결되어있습니다. 만약 3 번스위치를올리면 10 번핀의상태는 On 이되고이때디지털값읽기블록을사용하면 참 으로핀의값이표현됩니다. 반대로스위치를내리면핀의상태는 Off 가되고핀의값은 거짓 으로표현됩니다
 7 조센서값을읽는방법은두가지가있습니다.")

112 로킷브릭 : 디지털값블록 ( 입력 ) 또한아래와같이스크립트를작성하면 3 개딥스위치의변경되는값을스테이지에서계속확인할수있습니다. 7 조센서값읽어오기 ( 디지털핀읽기블록을사용하기 ) 7 조센서값을읽는방법은두가지가있습니다. 첫번째방법은딥스위치처럼 디지털값읽기 블록을사용하여 7 조센서를이루는각센서의상태를읽어오는것이며, 두번째방법은 7 조센서값읽기블록을사용하여 7 개의센서값을한번에읽어오는방식입니다. 아래그림처럼 12 번핀센서를감지한상태에서디지털값읽기블록을실행하면 참 으로핀의상태를알려줍니다. 감지되지않은상태에서는디지털값읽기블록은핀의상태를 거짓 으로알려줍니다. Bottom Side -112-
113 2 진수와 10 진수 (1) 7 조센서값전체를한번에읽어야할때편리하게사용할수있습니다. 다만이블록은 7 조센서값을 8 자리 2 진수로계산한후에다시 10 진수로변환된값을알려주기때문에 2 진수에대한지식이필요합니다. 2 진수는 0 과 1 로만나타낸수입니다. 어떤숫자의값이 1 보다큰경우에는자리올림을합니다. 예를들어 2 를 2 진수로표현하면 10 이되며 3 을 2 진수로표현하면 11 이됩니다. 만약 과같은큰자릿수의 2 진수인경우에는아래와같이계산하면편리합니다. 7 조센서값을읽는방법은두가지가있습니다. 첫번째방법은딥스위치처럼 디지털값읽기 블록을사용하여 7 조센서를이루는각센서의상태를읽어오는것이며, 두번째방법은 7 조센서값읽기블록을사용하여 7 개의센서값을한번에읽어오는방식입니다. 아래그림처럼 12 번핀센서를감지한상태에서디지털값읽기블록을실행하면 참 으로핀의상태를알려줍니다. 감지되지않은상태에서는디지털값읽기블록은핀의상태를 거짓 으로알려줍니다

114 2 진수와 10 진수 (2) 7 조센서중가운데센서만감지된경우는 14 번과 15 번핀이동시에 1( 참 ) 로상태가변화합니다. 14 번과 15 번두개의핀이가운데에위치한하나의센서에연결되어있기때문입니다. 따라서가운데센서가감지되었을때의값은아래와같습니다. 7 조센서중가운데센서와 13 번,12 번,11 번센서가감지된경우를이진수로나타내면 이며아래와같이십진수로계산하면 31 이됩니다
115 7 조센서값읽기 (7 조센서값읽기블록사용 ) 7 조센서에물체나손을감지시킨후 7 조센서값읽기블록을클릭하여값을알아봅시다. 모두감지한경우 : Bottom Side 18 번만 감지한경우 : Bottom Side 18 번과 11 번을 감지한경우 : Bottom Side -115-

116 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 실습해봅시다 1. 딥스위치로말풍선나오게하기 : 딥스위치 3 번을올리면스프라이트의말풍선에 Switch On! 이라는메시지가나오고딥스위치를내리면 Switch Off 라는메시지가나오게스크립트를작성해봅시다. 도움말 : 딥스위치 3 번에해당하는핀번호는 10 번입니다. 10 번값이 거짓 이면스위치가아래로내려간상태이고반대로 참 이면스위치가위로올라간상태입니다
 2 개가켜지거나꺼지고딥스위치 3 번을올리거나내리면맨오른쪽 (18 번 ) LED 가켜지거나꺼지도록스크립트를작성해봅시다.")
117 실습해봅시다 2. 딥스위치로 LED 키고끄기 : 딥스위치 1 번을올리면아래그림과같이맨왼쪽 (11 번 ) LED 가켜지고스위치를내리면 LED 가꺼지게해봅시다. 마찬가지로딥스위치 2 번을올리거나내리면가운데 LED(14, 15 번 ) 2 개가켜지거나꺼지고딥스위치 3 번을올리거나내리면맨오른쪽 (18 번 ) LED 가켜지거나꺼지도록스크립트를작성해봅시다. 도움말 : 스위치의상태는계속고정되므로스위치를위로올릴경우디지털값은 거짓 이되고조건블록의 만약 아래의스크립트부분이실행됩니다. 딥스위치를아래로내리면디지털값읽기블록의값은 참 이됩니다. 따라서 만약 ~ 라면 블록에서 하단의아니면 아래에연결된블록들이실행됩니다
 + 2^3(8) = 24 의값이출력된다는점을유의하기바랍니다.")
118 실습해봅시다 3. 부저연주하기 : 7 조센서값을이용하여 18 번핀에연결된센서가감지되면 도 음이연주되고, 17 번핀에연결된센서가감지되면 레 음이연주되게해봅시다. 이렇게각센서가감지될때마다각각의음이연주될수있는스크립트를작성해보세요. 도 레미파솔라시 Bottom Side 도움말 : 아무것도감지되지않은상태에서 7 조센서의값은 0 입니다. 스마트인벤터보드를뒤집은상태에서가장왼쪽만을감지했을때는 7 조센서의값이 2^7 = 128 이됩니다. 왼쪽에서두번째센서의값을감지했을때는 2^6 = 64 가되는것입니다. 여기서가운데센서는하나만을감지하더라도마치두개의센서가감지된것처럼 2^4(16) + 2^3(8) = 24 의값이출력된다는점을유의하기바랍니다. 이것은 8 개의핀을 7 개의센서에연결해서사용하도록설계되어있어가운데센서가 2 개의핀을차지하기때문입니다. 도 : 2^7 = 128 레 : 2^6 = 64 미 : 2^5 = 32 파 : 2^4 + 2^3 = 24 솔 : 2^2 = 4 라 : 2^1 = 2 시 : 2^0 =
 를감지시키면왼쪽으로회전하고오른쪽센서 (18 번 ) 를감지시키면오른쪽으로회전합니다.")

119 실습해봅시다 4. 스프라이트전진시키기 : 옆그림과같은레이싱카모양의스프라이트가있습니다 (racingcar.png 를가져오기 ). 7 조센서의왼쪽센서 (11 번 ) 를감지시키면왼쪽으로회전하고오른쪽센서 (18 번 ) 를감지시키면오른쪽으로회전합니다. 또한 11 번과 18 번을동시에감지시키면스프라이트가전진할수있도록스크립트를작성해봅시다. 도움말 : 이예제에서는센서를동시에두개이상감지시키는경우, 어떻게처리할것인지잘보여줍니다. 맨왼쪽센서의 7 조센서값은 128 이고맨오른쪽센서의 7 조센서값은 1 이므로두개를동시에감지시키면 즉, 129 가 7 조센서값이됩니다. 이러한원리로 7 조센서중동시에여러개의센서를감지시키는경우를구별할수있습니다


120 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 1. 오른쪽그림과같이스테이지에 1 번부터 3 번까지숫자가적혀있습니다. 각숫자는별개의스프라이트로이루어져있습니다. 여기에서특정숫자의딥스위치를올리면스테이지위에서해당하는숫자의색상이바뀌도록해봅시다. 그리고스위치를내리면원래의색상으로돌아올수있도록합니다. 2. 아래그림처럼스마트인벤터보드의 7 조센서를폭이약 2cm 정도인검은선에감지시키며좌우로움직입니다. 이때스테이지에나타난검은선역시 7 조센서가선을감지하는상태에따라좌우로움직일수있도록하여봅시다. 예를들어 12 번센서가선을감지하였다면스테이지에있는선도가운데를기준으로해서 12 번센서의위치만큼왼쪽으로이동할수있도록합니다
121 연습문제 3. 스마트인벤터보드의 7 조센서중 11 번과 12 번그리고 17 번과 18 번을사용하여타이밍게임을만들어봅시다. 스테이지의스프라이트가특정번호를부르면 7 조센서중그번호에맞는센서를빨리감지시키는게임입니다. 만약 1 초내에감지시키지못하면실패했다는메시지가뜨도록합시다. Bottom Side 스테이지의스프라이트 -121-
122 2 장로킷시뮬레이터 04 로봇의기초와로봇시뮬레이터 -122-
123 로봇의기초 로봇이란? 체코어 Robota( 일한다 ) 는단어에서나왔으며, 사람을대신해기능을수행하는기계를말하며, 최근에는사람에게즐거움을주는로봇들도지칭합니다. 로봇교육 어린이부터청소년, 성인에게까지도친근하고호기심이있는과학분야인로봇에대해쉽게다가서고전자, 기계, 컴퓨터등을통해로봇을제어할수있을뿐만아니라, 소프트웨어코딩교육을통해구현되는로봇교육을포함합니다. 로봇교육 (Software Coding Education) 의효과 로봇기술은미래의첨단산업기술의기초이자, 첨단과학이므로, 앞으로어린이들에게필요한교육이며, 로봇제작을통해 ( 문제해결을위한 ) 사고력, ( 무에서유를만드는 ) 창의력, ( 자신만의것으로활용가능한 ) 응용력을얻을수있습니다
124 로봇의기초 왜로봇을만들까? 로봇은인간의모든부분에있어서편리와삶을윤택하게만들어줍니다


125 로봇의기초 로봇의구조 인간처럼몸과두뇌, 감각등을지니고있습니다. 로봇의종류 크게움직임에따라분류합니다

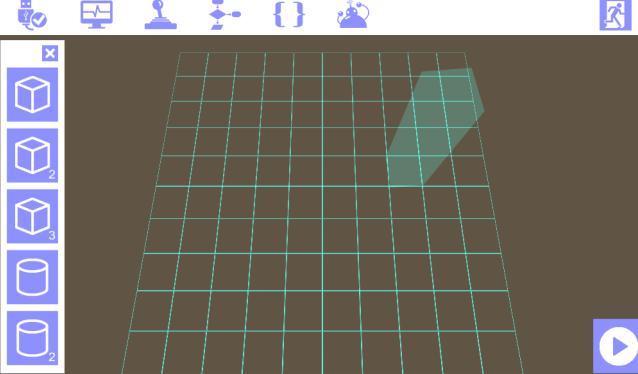
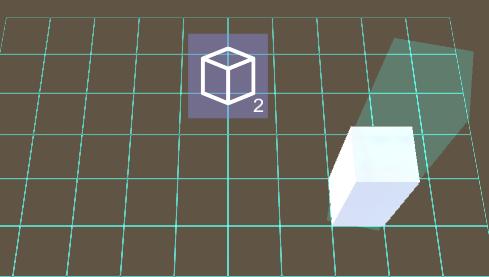
126 로봇시뮬레이터 고급컨트롤 내가만드는시뮬레이션과로봇제어환경 본인이직접환경을만들고인벤터보드와의구동방식을설정해보는로봇시뮬레이션환경입니다. 자신만의시뮬레이터환경을만들어봅시다
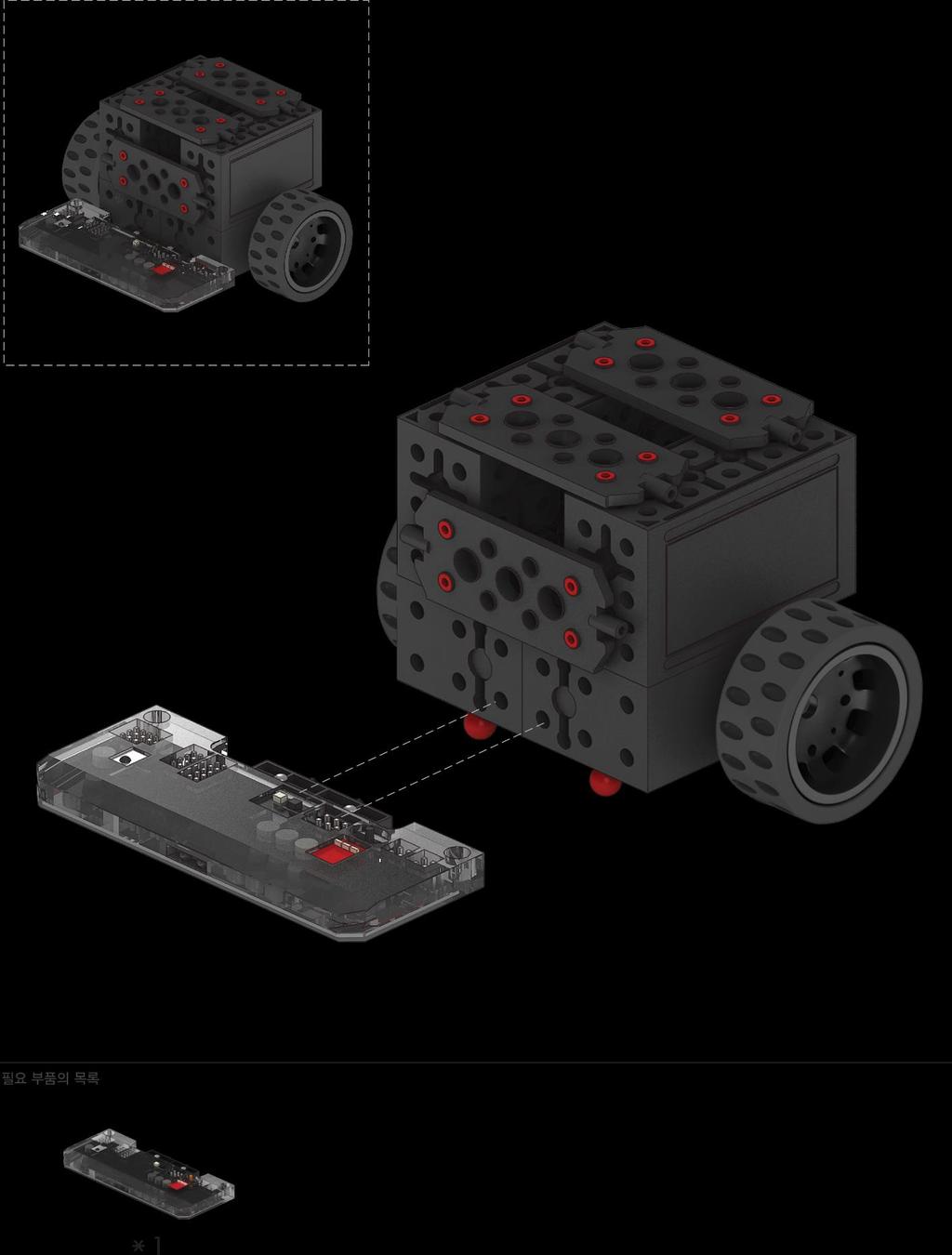
127 로봇의제어 DC 모터와인벤터보드의연결 로봇은모터의힘으로구동되고이로봇을제어하기위해서는모터를제어해야합니다.DC 모터와인벤터보드를연결해프로그래밍해봅시다. 빨간색사각형으로표시된부분이 DC 모터가연결되는핀입니다. DC 모터의선을이부분에연결합니다. 스마트인벤터보드는 2 개의 DC 모터를제어할수있으며따라서핀역시 M1 과 M2 두부분으로이루어져있습니다. DC 모터선을연결할때에는 + 방향에빨간색선이오도록하면됩니다.M3 는 M1 과동일한연결핀으로서독립적으로제어되는것이아니라 M1 의모터속도와방향을그대로따릅니다. M4 역시도 M2 와동일한연결핀으로서 M2 와동일하게움직입니다


128 로봇의제어 - DC 모터블록사용하기 DC 모터블록의첫번째탭은모터번호, 두번째는모터의속도, 마지막탭은모터의동작을결정합니다. 아래는이미지는여러가지 DC 모터블록의사용법을알려줍니다. - M2 핀에연결된 DC 모터를속도 70, 방향은역회전 ( 시계반대방향 ) 으로움직입니다. - M2 핀에연결된 DC 모터를속도 70, 방향은역회전 ( 시계반대방향 ) 으로움직입니다. -M1 핀과 M2 핀에연결된두개의 DC 모터를속도 50, 각자다른방향으로움직입니다.1 초동안움직임을유지하다가동시에두모터가멈추게합니다
 으로, 그리고다음 1 초동안은시계반대방향 ( 역회전 ) 으로회전한후모터가정지되도록해봅시다. 도움말 : DC 모터는멈춤블록으로명령을내려야만멈추게됩니다.")

129 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 실습해봅시다 1. DC 모터구동하기 : DC 모터를 M1 핀에연결합니다. 스페이스키를누르면 1 초동안은시계방향 ( 정회전 ) 으로, 그리고다음 1 초동안은시계반대방향 ( 역회전 ) 으로회전한후모터가정지되도록해봅시다. 도움말 : DC 모터는멈춤블록으로명령을내려야만멈추게됩니다. 별도의멈춤명령이없다면스크립트실행이멈추었을때, 심지어보드와의통신이끊어진경우에도모터는움직입니다. 이럴경우에는보드의리셋버튼을누르면모터가멈춥니다. 2. DC 모터구동하기 : DC 모터를두개준비하여하나는 M1 핀에, 다른하나는 M2 에연결합니다. 스크립트를클릭하면두개의모터모두 1 초동안은시계방향으로회전하며, 다음 1 초동안은시계반대방향으로회전한후멈출수있도록스크립트를작성해봅시다. 도움말 : 멈춤명령을내린경우 DC 모터의속도나방향설정은중요하지않습니다. 속도나방향설정과는무관하게멈춤이나풀림은동일한효과를가져옵니다

130 실습해봅시다 3. DC 모터구동하기 : DC 모터 2 개를 M1 핀과 M2 핀에각각연결합니다. 스마트인벤터보드의앞쪽세개의센서중왼쪽센서를감지하면 M1 핀에연결된모터가회전하고, 오른쪽센서를감지하면 M2 핀에연결된모터가회전하게해봅니다. 두센서를동시에감지하면두개의모터가함께회전하여야합니다. 도움말 : 만약 ~ 이면 블록을사용하여두모터가독립적으로움직일수있도록하였습니다. 따라서두센서를한꺼번에감지했을경우두모터가동시에움직이려면두 DC 모터는독립적으로제어될수있어야합니다

131 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 연습문제 1.DC 모터를 M1 핀에연결한후, 키보드의위쪽화살표키를누르면모터의속도가서서히증가하고아래쪽화살표키를누르면속도가천천히내려갈수있도록스크립트를작성해보세요. 2. 아래그림과같이스프라이트에는슬라이더바가있습니다. 슬라이더바의움직임에따라 M1 핀에연결된 DC 모터의속도가변화합니다. 1 슬라이더바의레버는마우스에따라움직이는데, 마우스가양끝으로가게되면더이상따라오지않고제자리에서멈춰있어야하며이때 DC 모터역시멈춰야합니다. 2 레버가중간에위치할때에도 DC 모터는멈춰야합니다. 3 4 레버가마우스의움직임에따라왼쪽으로움직일때에는모터가시계방향 ( 정회전 ) 으로회전하며속도는레버의움직인양에비례해서빨라져야합니다. 레버가마우스의움직임에따라오른쪽으로움직일때에는모터는시계반대방향 ( 역회전 ) 으로회전하며속도역시레버의움직인양에비례해서빨라져야합니다. 이처럼레버를좌우로조종하여모터의속도의조절하는패널을만들어봅시다. 속도 : 정방향최대 속도 : 0 속도 : 역방향최대 -131-
132 연습문제 3. DC 모터를 M1 핀에연결합니다. 이후스크립트를실행하면모터의속도와방향을묻는질문과입력창이나옵니다. 입력창에입력한속도와방향대로움직일수있도록스크립트를작성해봅시다. 속도는 0 에서 100 까지의범위로하며입력받은후에는입력받은것이문자인지숫자인지구분될수있어야합니다. 방향을입력받을때에는네가지 (cw,ccw,stop,loose) 로입력받도록하고다른문자나숫자를입력받았을때에는무시하도록합니다
133 3 장로봇과큐브웍스 01 모터의활용 -133-

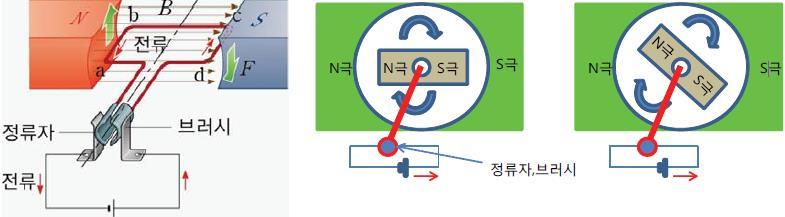
134 DC 모터의활용 DC 모터 모터는전기를이용하여회전운동을얻어내는대표적인동력장치입니다. 우리가사용하는모터의내부에는영구자석, 코일과같은부품이들어있으며, 외부에서들어오는전기의방향과자기장의방향에따라모터가회전하는방향이결정됩니다. 모터는자석의 N 극과 S 극이서로당기고 N 극과 N 극, S 극과 S 극 같이같은극끼리는밀어내는원리를이용하여회전합니다. 특히,DC 모터는 360 도회전하므로, 바퀴구동형로봇을만들때적합한모터입니다. 2 개의모터를사용하여 2 륜구동로봇을만들거나 4 개의모터를사용하여 4 륜구동로봇을만드는데사용합니다
135 DC 모터의활용 DC 모터블록사용하기 DC 모터블록은다음과같이세가지의값을입력하도록되어있습니다. 1. 모터선택 : 어떤모터를? 스마트보드는두개의모터를제어할수있습니다. 두개의모터를각각 M1 과 M2 라고합니다. 움직이고싶은모터를연결하고, 알맞게선택하도록합니다. M1 M2 2. 모터속도 : 회전속도는? 모터의속도를정합니다. 모터의속도는 0 부터 100 까지입니다. 숫자가클수록모터의속도가빨라집니다. 3. 모터동작 : 어떤동작을? 모터의동작을정합니다.DC 모터는다음과같은동작을합니다. 정회전 : 모터를시계방향으로회전합니다. 역회전 : 모터를시계반대방향으로회전합니다. 멈춤 : 모터를정지시킵니다.( 자전거의브레이크를밟듯이정지 ) 풀림 : 모터를정지시킵니다.( 자전거의페달을놓듯이정지 -135-



136 DC 모터의활용 DC 모터블록사용하기 로킷브릭의 로킷스마트 탭을누르면아래그림과같은블록리스트들이나열됩니다. 그중 DC 모터관련블록을사용할것입니다. 다음의예제로모터의동작을살펴봅시다. M1 에해당하는모터를 50 의속도로시계방향으로회전하고,1 초를기다린후에, 멈추고다시 1 초를기다리는것을반복하는예제입니다

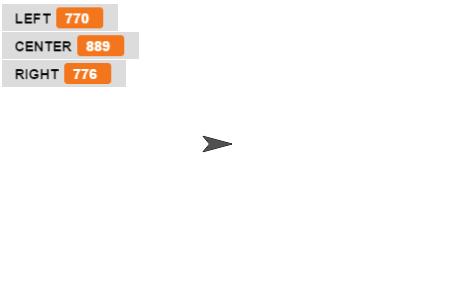
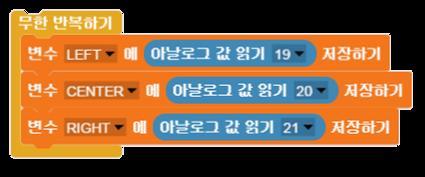
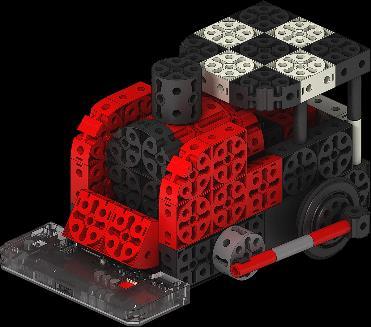
137 DC 모터의활용 DC 모터속도와방향을센서로제어하기 스크립트를작성하기전에먼저센서입력값을저장할 3 개의변수블록을미리만들어놓도록합니다. 변수는각각다음의위치에해당하는센서값을저장하게됩니다. LEFT CENTER RIGHT -137-


138 DC 모터의활용 DC 모터속도와방향을센서로제어하기 1. 센서로모터방향제어하기 보드의적외선센서에감지가되면값이작아지게됩니다. 센서값이 100 보다작아지면, M1 모터가정회전을하게됩니다. 반대로, 센서가감지가되지않을때는,M1 모터가역회전을하게됩니다. 모터정회전 센서값이 100 보다작을때 Center 센서 센서값이 100 보다클때 모터역회전 -138-


139 DC 모터의활용 DC 모터속도와방향을센서로제어하기 2. 센서로모터속도제어하기 센서값으로모터의속도를제어합니다. 센서값은 0 부터 1023 까지입력이되며, 속도값은 0 부터 100 까지입력이가능하므로, 센서값과속도값의범위를맞춰주기위해서센서값을 10 으로나누어서그값을속도에입력합니다. 센서값 센서값나누기 10 속도값 LEFT 센서가감지되면 M1 모터의속도가줄어들게되고, RIGHT 센서가감지되면 M2 모터의속도가줄어들게됩니다
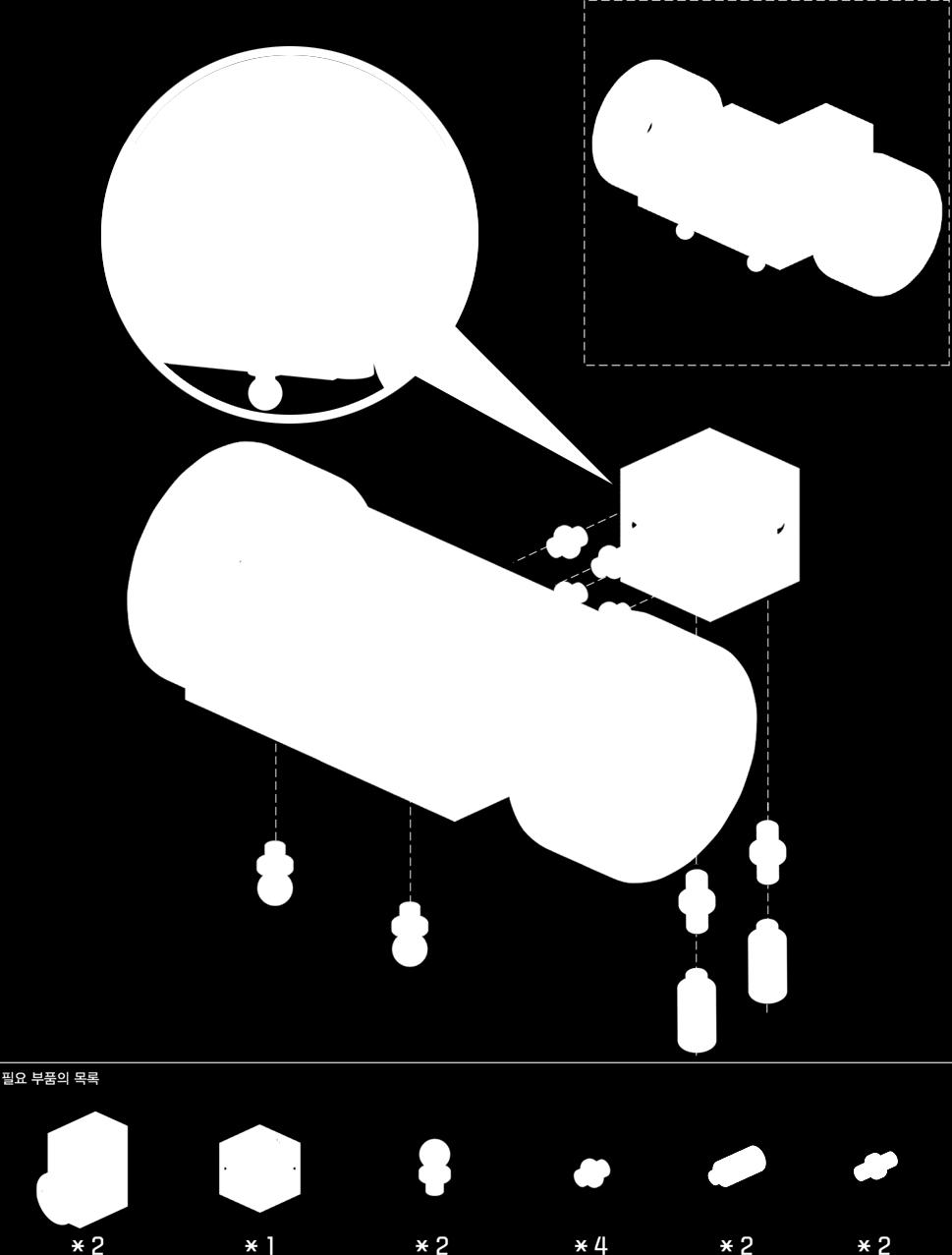
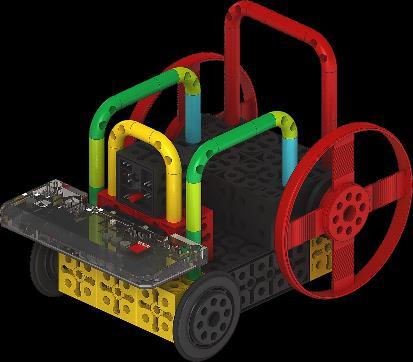
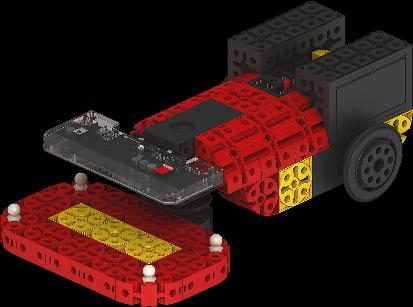
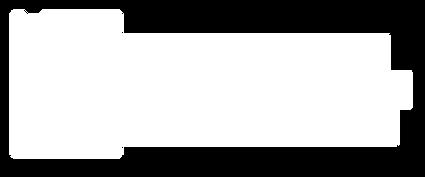
140 DC 모터를사용하는로봇만들기 -140-
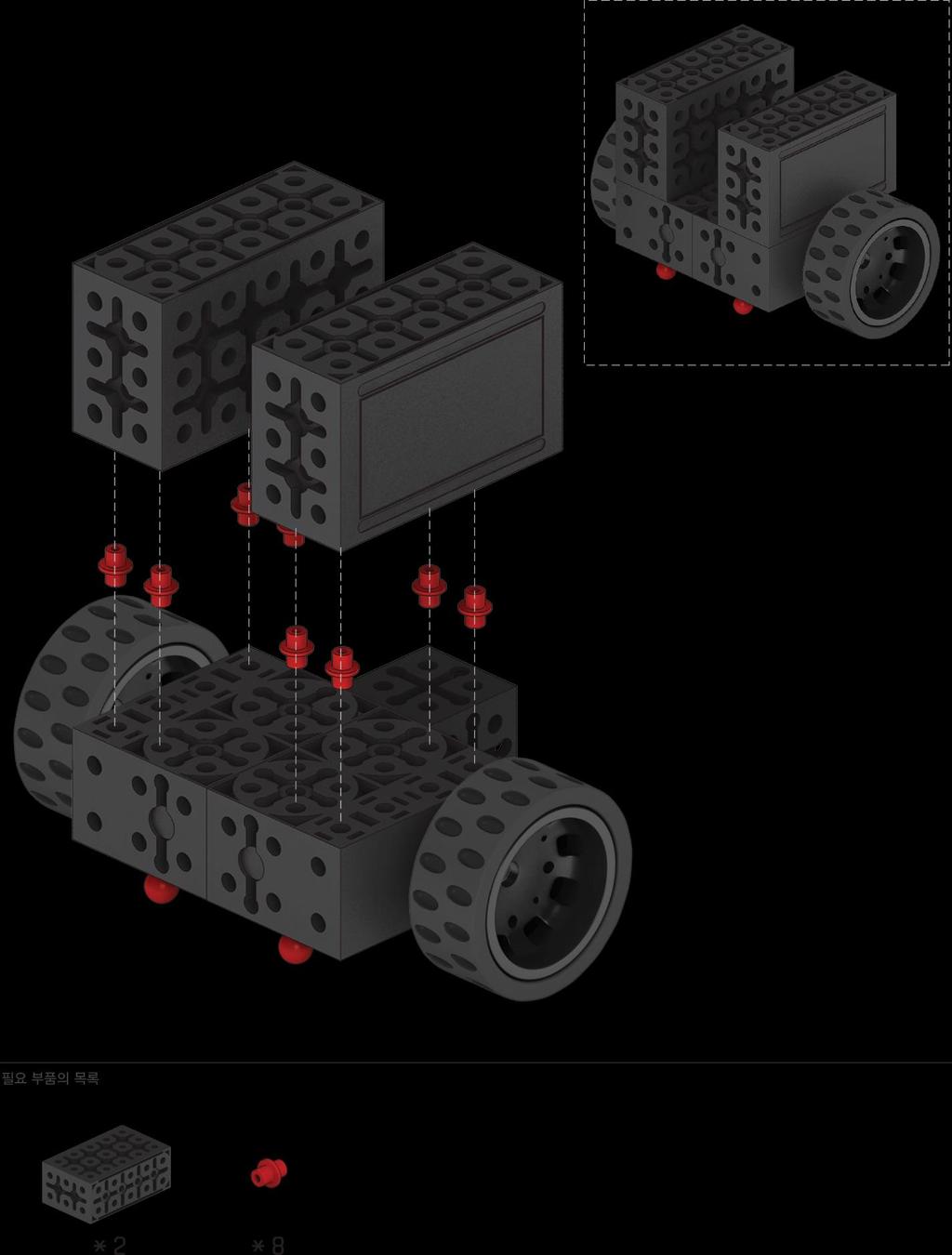
141 DC 모터를사용하는로봇만들기 -141-
142 DC 모터를사용하는로봇만들기 -142-
143 DC 모터를사용하는로봇만들기 -143-
144 DC 모터를사용하는로봇만들기 -144-
145 지능형로봇구동하기 내장프로그램사용하기 조립한로봇의전원을켜고손으로다양하게구동해봅시다. 완성된로봇에입력하는프로그램모드에따라각각다른로봇으로구동이가능합니다. 주의 딥스위치가모두 OFF 되어야합니다. 프로그램모드는아래와같습니다. 어보이더 ( 프로그램 1 번모드 ) 바닥감지로봇 ( 프로그램 2 번모드 ) 라인트레이서 ( 프로그램 12 번모드 ) -145-
146 지능형로봇구동하기 _(1) 어보이더구동 장애물을두고로봇이정상적으로회피하는지확인합니다. 어보이더 ( 프로그램 1 번모드 ) -146-
147 지능형로봇구동하기 _(2) 바닥감지로봇구동 흰색의바닥이나책상위에검은색의붙여로봇이움직이는것을확인합니다 바닥감지로봇 ( 프로그램 2 번모드 ) -147-
148 지능형로봇구동하기 _(3) 라인트레이서구동 흰색의바닥이나책상위에검은색의테이프를붙여로봇이라인을따라움직이는지확인합니다. 라인트레이서 ( 프로그램 12 번모드 ) -148-
149 지능형로봇구동하기 _(3) 라인트레이서감도조절하기 라인트레이서의작동이시작되면우선감도체크모드로들어갑니다. 이모드에서는라인트레이서를검은선위에올려두면검은선이감지되는부분의 LED 만꺼지게됩니다. 만약선에올려놓았을때모든 LED 가꺼지거나켜진다면감도에문제가있는것으로, 가변저항을통해감도조절을하게됩니다. 감도조절후에는중앙센서를감지시켜줍니다. 가변저항 -149-


150 지능형로봇구동하기 _(3) 라인트레이서프로그래밍하기 감도조절이끝난후프로그래밍모드로들어가게됩니다. 아래설명을보고직접라인을따라가게프로그래밍해봅시다. 입력을완료했다면, 중앙의센서를감지시켜프로그램을실행해봅니다. 교차로에서왼쪽으로 교차로에서오른쪽으로 교차로를지나앞으로직진 교차로에서유턴 한단계실행취소 구동시작 제시된순서대로프로그램을입력하면로봇이어떻게 움직이는지확인해봅시다. START -150-
 자동화된로봇이아닌,")
151 지능형로봇의이해 지능형로봇 어떤로봇을지능형로봇이라고부를수있을까요? 단순한조립, 용접, 운반등의노동을수행하는 ( 반 ) 자동화된로봇이아닌, 주변환경을스스로인식한후자신의행동을조절하고결정하는로봇을 지능형로봇 이라고부릅니다. 지능형을결정하는요소는인간과비교하여로봇이가질수있는센서와모듈을이용하여프로그램을어떻게적용하느냐에결정됩니다. 이제부터여러분이직접지능형로봇의프로그래밍을해봅시다


152 키보드를활용한구동 변수만들기 변수만들기를사용하여변수를만들어줍니다. 모터의회전조건 M1 M2 M1 M2 모터의기준에서시계반대방향으로돌아가는것을역회전 모터의기준에서시계방향으로돌아가는것을정회전 이러한기준으로모터의전진, 후진, 좌회전, 우회전을만들수있습니다
 정지")
153 키보드를활용한구동 스크립트만들기 Speed 를 80 으로넣어줌 ( 숫자크기에속도변화 ) 조건문을무한반복하기 조건 1> 위쪽화살표 M1: 역회전,M2: 정회전전진 조건 2> 아래쪽화살표 M1: 정회전,M2: 역회전후진 조건 3> 왼쪽화살표 M1: 정회전,M2: 정회전좌회전 조건 4> 오른쪽화살표 M1: 역회전, M2: 역회전우회전 조건이아닐때 ( 키를안누를때 ) 정지 -153-
")

154 키보드를활용한구동 스크립트만들기 Speed 를 80 으로넣어줌 ( 숫자크기에속도변화 ) 조건문을무한반복하기 조건 1 전진 조건 2 후진 조건 3 우회전 조건 4 좌회전 조건이아닐때 정지 -154-
155 키보드를활용한구동 로봇조종하기 Rokit brick 의무대에서 x 축 ( 가로 ), y 축 ( 세로 ) 을마우스로클릭하면전, 후, 좌, 우로로봇이구동합니다
 직선코스 2) 직진후방향이동코스 GOAL GOAL 2.")
156 연습문제 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 1. 순차적으로출발지점부터목표지점까지자동으로도착할수있도록스크립트를작성해보세요 1) 직선코스 2) 직진후방향이동코스 GOAL GOAL 2. Rokit brick 의무대에서원의지름을조절하여지름의변화만큼로봇이원을그리는스크립트를작성해보세요
157 3 장로봇과큐브웍스 02 어보이더 -157-
158 어보이더 어보이더의소개 어보이더는전방에장애물이있으면다른방향으로회전해다시움직이는로봇입니다. 적외선을전방으로쏘아반사되는빛의양으로장애물의유무를알아내어장애물을피해갑니다. 어보이더의원리를직접제작하며배워봅시다

159 어보이더알고리즘 원리 장애물을피하며장애물의반대방향으로움직입니다

")

160 프로그램설명 변수설명 변수만들기를사용하여 5 개의변수블록을만들어줍니다. sensorl - 왼쪽센서의아날로그값 sensorm - 중앙센서의아날로그값 sensorr 오른쪽센서의아날로그값 speed 모든모터의속도 limit -기준이되는값 해당변수의아날로그값 만들어진 sensor 변수에는앞서배웠던보드전방의 IR 센서보정값 (0 1023) 이들어갑니다. sensorl 19핀 sensorm 20핀 sensorr 21핀 이러한값이들어가려면각센서의해당핀번호가입력되어야만메인보드로입력되는값이실시간으로감지되어변수값으로전달됩니다 실시간아날로그

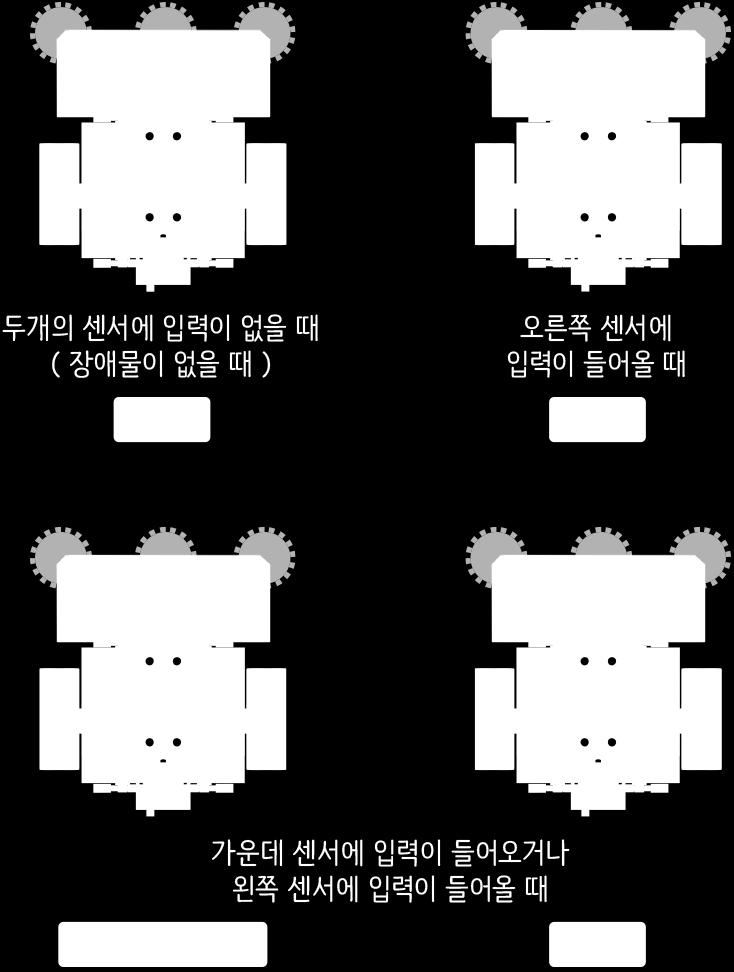
161 프로그램설명 반복 변수선언 변수 speed 와 limit 는스크립트가시작할때각각특정한값을가져야합니다. 이것을초기값이라합니다. 모터속도를제어하는값인 speed 는초기값이 80 입니다. 또한센서의감지여부를결정하는값이들어있는변수 limit 의초기값은 200 입니다. 아날로그값 앞부분세개의센서값을읽어서각각의변수에저장합니다. 이스크립트들이무한반복하기블록안에들어있다는점을유의해주세요. 조건 1 왼쪽센서값이변수 limit 보다작으면물체가감지된것으로판단하고모터를움직여서오른쪽으로회전합니다. 이때모터의회전방향은둘다역회전이어야오른쪽으로회전할수있습니다. 조건 2 가운데센서값이변수 limit 보다작으면물체가감지된것으로판단하고모터를움직여서 0.5 초정도후진한후오른쪽으로회전합니다. 이렇게후진한다음회전하면더욱안정적으로물체를피할수있습니다. 조건 3 조건아니면 오른쪽센서값이변수 limit 보다작으면물체가감지된것으로판단하고모터를움직여서왼쪽으로회전합니다. 이때모터의회전방향은둘다정회전이어야왼쪽으로회전합니다. 3 개중어떤센서도감지되지않은경우에는로봇은전진합니다. 두개의모터중왼쪽 (1 번 ) 모터는역회전, 오른쪽 (2 번 ) 모터는정회전할때전진하게됩니다

 오른쪽센서에입력이들어올때 ( 빛이오른쪽에서비출때 ) 좌회전 우회전 2.")
162 연습문제 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 1. 다음과같이빛을따라오는로봇응용스크립트를작성해보세요. 센서로입력된빛을따라가며움직입니다. 센서의입력이없을때 ( 빛이없을때 ) 정지 두개의센서에입력이들어올때 ( 빛이비출때 ) 전진 왼쪽센서에입력이들어올때 ( 빛이왼쪽에서비출때 ) 오른쪽센서에입력이들어올때 ( 빛이오른쪽에서비출때 ) 좌회전 우회전 2. 다음과같은미로를탈출하기위한어보이더응용스크립트를작성해보세요 -162-
163 3 장로봇과큐브웍스 03 바닥감지로봇 -163-
164 바닥감지로봇 바닥감지로봇 ( 스모로봇 ) 의소개 2 개의 DC 모터를사용하여앞으로나아가는자율주행방식의 2 륜구동로봇입니다. 스마트보드의뒷면에배치한 7 개의적외선센서로로봇이전진하는동안바닥의상태를감지합니다. 밑면의적외선센서들이바닥이더이상존재하지않는상태를감지하면로봇의몸체를후진하거나옆으로회전하여다른방향으로나아갑니다. 이러한동작을반복하여낭떠러지로둘러싸인일정한영영ㄱ을추락하지않고자유롭게주행합니다

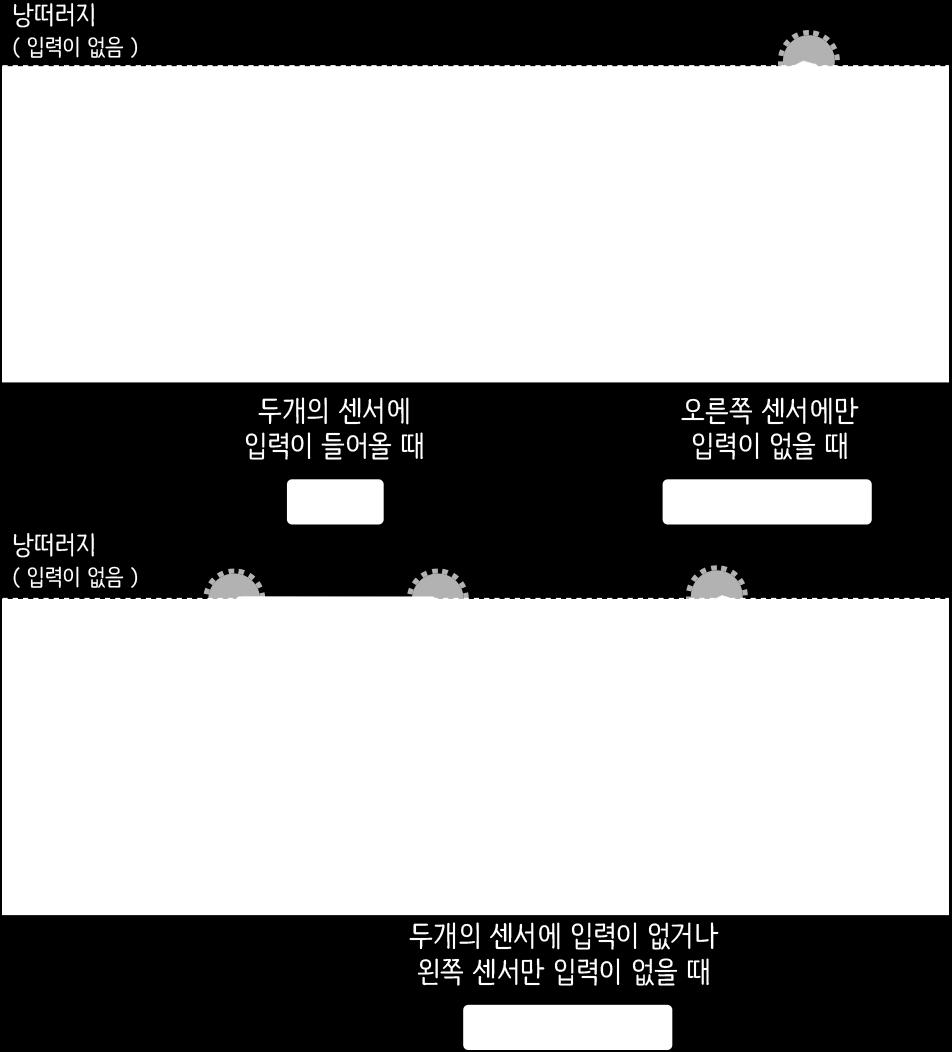
165 바닥감지로봇알고리즘 원리 센서로입력된값이없을때는후진후방향을틀어다른쪽으로이동합니다

166 프로그램설명 변수설명 변수만들기를사용하여한개의변수블록을만들어줍니다. speed 모든모터의속도 보드뒷면 7 개센서의디지털값 보드뒷면의 7 개의센서가디지털방식의 IR 센서입니다. 디지털센서란 0 또는 1 과같은연속되지않는두개의숫자로정보를생성하는것을뜻합니다 핀 18 핀 17핀 16핀 13핀 12핀 11핀 센서 4 개 : 11,12,17,18 사용 -166-

167 프로그램설명 변수선언 반복 조건문을무한반복 변수 speed 에 80 을저장 조건 1 바닥에있는디지털센서중 11,12 번센서가바닥을감지안할때후진 0.5 초간대기 오른쪽으로회전 0.5 초간대기 조건 2 바닥에있는디지털센서중 17,18 번센서가바닥을감지안할때후진 0.5 초간대기 왼쪽으로회전 0.5 초간대기 조건이아닐때 조건아아닐때전진 -167-
168 연습문제 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 1. 바닥에검은색절연테이프를붙이고물체를모두밖으로내보내는스모형식의로봇응용스크립트를작성해보세요. 2. 다음과같은미로를탈출하기위한어보이더응용스크립트를작성해보세요 -168-
169 3 장로봇과큐브웍스 04 라인트레이서 -169-
170 라인트레이서 라인트레이서의소개 스마트보드의밑면에있는 7 개의적외선센서로 2cm 이내의연속된선을감지하여따라가는로봇입니다. 적외선센서는검은색과하얀색의차이를가장잘감지하므로라인트레이서가따라가야할선은하얀색바탕에검은색선으로합니다. 이선을감지하면서로봇이전진하는중에로봇의중심이선에서벗어나면좌우모터속도를조절하여원상태로되돌아오도록합니다


171 라인트레이서알고리즘 원리 검은색 : 입력이없음 ( 적외선을흡수 ) 흰색 : 입력이들어옴 ( 적외선을반사 ) -171-
172 프로그램설명 변수설명 변수만들기를사용하여 3개의변수블록을만들어줍니다. speed 모든모터의속도 senl- 왼쪽 12핀센서가감지되면참. 감지되지않으면거짓. senr- 오른쪽 17핀센서가감지되면참. 감지되지않으면거짓. 보드뒷면 7 개센서의디지털값 보드뒷면의 7 개의센서가디지털방식의 IR 센서입니다. 디지털센서란 0 또는 1 과같은연속되지않는두개의숫자로정보를생성하는것을뜻합니다 핀 18 핀 17핀 16핀 13핀 12핀 11핀 센서 2 개 : 12, 17 사용 -172-

173 프로그램설명 반복 변수선언 조건문을무한반복 변수 speed 에 50 을저장 조건 1 바닥에있는디지털센서중 12 핀이감지안되고, 17 핀이감지될때왼쪽으로회전 조건 2 바닥에있는디지털센서중 12 핀이감지되고, 17 핀이감지안될때오른쪽회전 조건 3 바닥에있는디지털센서중 12 핀,17 핀둘다감지될때전진 정지 키보드의스페이스바를눌렀을때정지 -173-
174 연습문제 예제와연습문제파일다운로드는 rokitarduino.org 웹사이트 DOWNLOADS 를확인해주세요. 자세한내용은교재 12 페이지 1. 바닥에검은색절연테이프를다음과같이붙이고, 두번째교차로지점에서멈추는응용스크립트를작성해보세요. 2. 다음과같은직각형태의라인을통과하여첫번째교차로에서멈추는응용스크립트를작성해보세요
175 -175-
176 -176-
슬라이드 1
 목차 1. 로킷브릭 (Rokit Brick) 사용하기 0장. 프로그램소개 1장. 블록, 스크립트, 스프라이트 2장. 스크립트만들기 3장. 변수와반복그리고조건 4장. 그림그리기와스프라이트조종하기 3 9 20 31 48 2. 디바이스제어하기 1장. 인벤터내장보드시뮬레이션 전방센서값점검하기 2장. 장치연동게임시뮬레이션 로킷시뮬레이터게임 3장. 로봇구동시뮬레이션 로킷시뮬레이터로봇시뮬레이션
목차 1. 로킷브릭 (Rokit Brick) 사용하기 0장. 프로그램소개 1장. 블록, 스크립트, 스프라이트 2장. 스크립트만들기 3장. 변수와반복그리고조건 4장. 그림그리기와스프라이트조종하기 3 9 20 31 48 2. 디바이스제어하기 1장. 인벤터내장보드시뮬레이션 전방센서값점검하기 2장. 장치연동게임시뮬레이션 로킷시뮬레이터게임 3장. 로봇구동시뮬레이션 로킷시뮬레이터로봇시뮬레이션
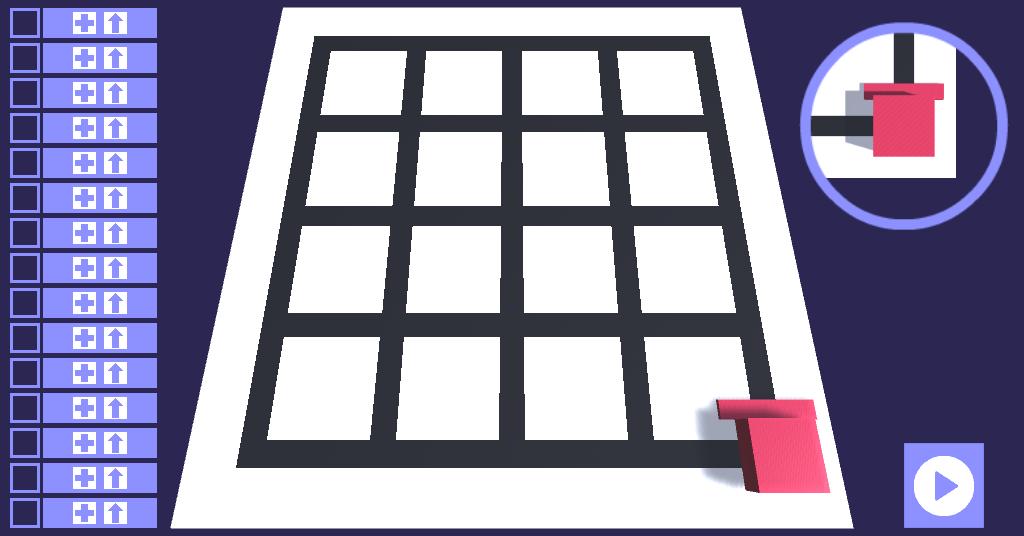
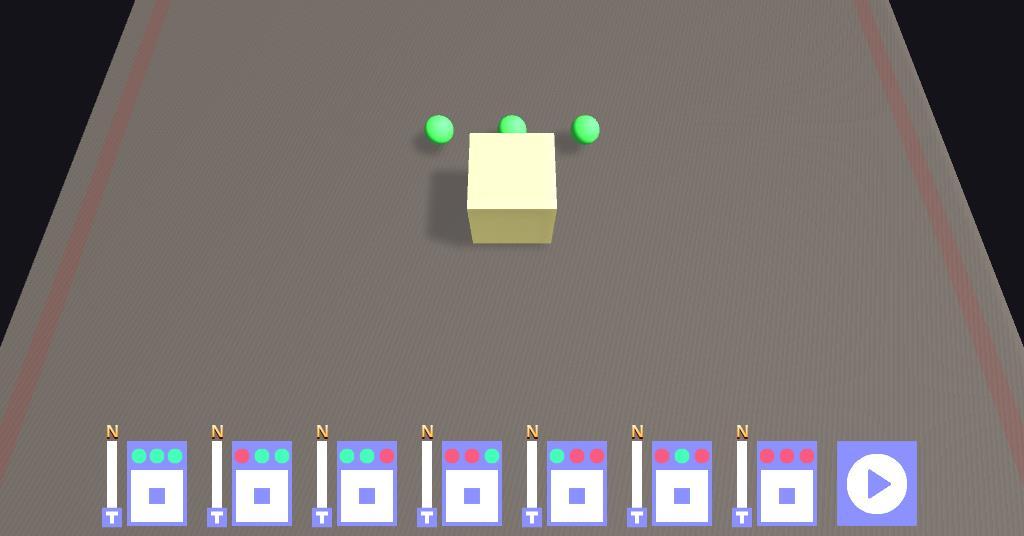
지도상 유의점 m 학생들이 어려워하는 낱말이 있으므로 자세히 설명해주도록 한다. m 버튼을 무리하게 조작하면 고장이 날 위험이 있으므로 수업 시작 부분에서 주의를 준다. m 활동지를 보고 어려워하는 학생에게는 영상자료를 접속하도록 안내한다. 평가 평가 유형 자기 평가
 수업주제 경찰 출동! (버튼, LED, 버저 사용하기) 9 / 12 차시 수업의 주제와 목표 본 수업에서는 이전 차시에 배웠던 블록들의 기능을 복합적으로 활용한다. 스위치 기능을 가진 버튼을 활용하여 LED와 버저를 동시에 작동시키도록 한다. 각 블록들을 함께 사용하는 프로젝트를 통해 각각의 기능을 익히고 보다 다양한 활용 방법을 구상할 수 있다. 교수 학습
수업주제 경찰 출동! (버튼, LED, 버저 사용하기) 9 / 12 차시 수업의 주제와 목표 본 수업에서는 이전 차시에 배웠던 블록들의 기능을 복합적으로 활용한다. 스위치 기능을 가진 버튼을 활용하여 LED와 버저를 동시에 작동시키도록 한다. 각 블록들을 함께 사용하는 프로젝트를 통해 각각의 기능을 익히고 보다 다양한 활용 방법을 구상할 수 있다. 교수 학습
쓰리 핸드(삼침) 요일 및 2405 요일 시간, 및 요일 설정 1. 용두를 2의 위치로 당기고 반시계방향으로 돌려 전날로 를 설정합니다. 2. 용두를 시계방향으로 돌려 전날로 요일을 설정합니다. 3. 용두를 3의 위치로 당기고 오늘 와 요일이 표시될 때까지 시계방향으로
 요일 및 2405 요일 시간, 및 요일 설정 1. 용두를 2의 위치로 당기고 반시계방향으로 돌려 전날로 를 설정합니다. 2. 용두를 시계방향으로 돌려 전날로 요일을 설정합니다. 3. 용두를 3의 위치로 당기고 오늘 와 요일이 표시될 때까지 시계방향으로") 한국어 표준 설정안내 서브 초침 시간 및 설정 1. 용두를 2의 위치로 뽑아냅니다. 2. 용두를 시계방향 또는 반시계방향으로 돌려(모델에 따라 다름) 를 전날로 설정합니다. 3. 용두를 3의 위치로 당기고 현재 가 표시될 때까지 시계방향으로 돌립니다. 4. 용두를 계속 돌려 정확한 오전/오후 시간을 설정합니다. 5. 용두를 1의 위치로 되돌립니다. 169 쓰리
한국어 표준 설정안내 서브 초침 시간 및 설정 1. 용두를 2의 위치로 뽑아냅니다. 2. 용두를 시계방향 또는 반시계방향으로 돌려(모델에 따라 다름) 를 전날로 설정합니다. 3. 용두를 3의 위치로 당기고 현재 가 표시될 때까지 시계방향으로 돌립니다. 4. 용두를 계속 돌려 정확한 오전/오후 시간을 설정합니다. 5. 용두를 1의 위치로 되돌립니다. 169 쓰리
슬라이드 1
 로킷스마트코딩 0-1단계 Rokit Smart Coding Step. 0-1 STEP 0. 1st~2nd Week 목차 로킷브릭 (Rokit Brick) 소개 : 탭의종류조립도 : 선풍기학습목표로킷브릭 (Rokit Brick) 사용하기 (1) 스프라이트바꾸기 (2) 스크립트작성하기 (3) 보드연결하기 (SW/HW) (4) Rokit Brick 스프라이트로봇제어예제
로킷스마트코딩 0-1단계 Rokit Smart Coding Step. 0-1 STEP 0. 1st~2nd Week 목차 로킷브릭 (Rokit Brick) 소개 : 탭의종류조립도 : 선풍기학습목표로킷브릭 (Rokit Brick) 사용하기 (1) 스프라이트바꾸기 (2) 스크립트작성하기 (3) 보드연결하기 (SW/HW) (4) Rokit Brick 스프라이트로봇제어예제
1
 1 2 3 4 5 6 b b t P A S M T U s 7 m P P 8 t P A S M T U s 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 Chapter 1 29 1 2 3 4 18 17 16 15 5 6 7 8 9 14 13 12 11 10 1 2 3 4 5 9 10 11 12 13 14 15
1 2 3 4 5 6 b b t P A S M T U s 7 m P P 8 t P A S M T U s 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 Chapter 1 29 1 2 3 4 18 17 16 15 5 6 7 8 9 14 13 12 11 10 1 2 3 4 5 9 10 11 12 13 14 15
RVC Robot Vaccum Cleaner
 RVC Robot Vacuum 200810048 정재근 200811445 이성현 200811414 김연준 200812423 김준식 Statement of purpose Robot Vacuum (RVC) - An RVC automatically cleans and mops household surface. - It goes straight forward while
RVC Robot Vacuum 200810048 정재근 200811445 이성현 200811414 김연준 200812423 김준식 Statement of purpose Robot Vacuum (RVC) - An RVC automatically cleans and mops household surface. - It goes straight forward while
슬라이드 1
 첨부 4 리모콘별 TV 셋팅방법 2011. 1 전략서비스본부서비스지원팀 1 경제형 2002년개발쌍방향단순-2007년개발경제형 /PVR-2007년개발 2002 년 02 월 ~ 2003 년 08 월 85 만 (40 만은 TV 설정불가 ) 선호채널 도움말 만가능 1) TV 전원을키고 2) 0( 숫자 )+ 음소거동시에누름 -> LED ON 3) 리모콘 LED 주황색불확인후제조사코드입력
첨부 4 리모콘별 TV 셋팅방법 2011. 1 전략서비스본부서비스지원팀 1 경제형 2002년개발쌍방향단순-2007년개발경제형 /PVR-2007년개발 2002 년 02 월 ~ 2003 년 08 월 85 만 (40 만은 TV 설정불가 ) 선호채널 도움말 만가능 1) TV 전원을키고 2) 0( 숫자 )+ 음소거동시에누름 -> LED ON 3) 리모콘 LED 주황색불확인후제조사코드입력
View Licenses and Services (customer)
") 빠른 빠른 시작: 시작: 라이선스, 라이선스, 서비스 서비스 및 주문 주문 이력 이력 보기 보기 고객 가이드 Microsoft 비즈니스 센터의 라이선스, 서비스 및 혜택 섹션을 통해 라이선스, 온라인 서비스, 구매 기록 (주문 기록)을 볼 수 있습니다. 시작하려면, 비즈니스 센터에 로그인하여 상단 메뉴에서 재고를 선택한 후 내 재고 관리를 선택하십시오. 목차
빠른 빠른 시작: 시작: 라이선스, 라이선스, 서비스 서비스 및 주문 주문 이력 이력 보기 보기 고객 가이드 Microsoft 비즈니스 센터의 라이선스, 서비스 및 혜택 섹션을 통해 라이선스, 온라인 서비스, 구매 기록 (주문 기록)을 볼 수 있습니다. 시작하려면, 비즈니스 센터에 로그인하여 상단 메뉴에서 재고를 선택한 후 내 재고 관리를 선택하십시오. 목차
ISP and CodeVisionAVR C Compiler.hwp
 USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler http://www.avrmall.com/ November 12, 2007 Copyright (c) 2003-2008 All Rights Reserved. USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler
USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler http://www.avrmall.com/ November 12, 2007 Copyright (c) 2003-2008 All Rights Reserved. USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler
Studuino소프트웨어 설치
 Studuino 프로그래밍환경 Studuino 소프트웨어설치 본자료는 Studuino 프로그래밍환경설치안내서입니다. Studuino 프로그래밍 환경의갱신에따라추가 / 수정될수있습니다. 목차 1. 소개... 1 2. Windows... 2 2.1. 프로그래밍환경설치... 2 2.1.1. 웹설치버전설치방법... 2 2.2. Studuino 프로그래밍환경실행...
Studuino 프로그래밍환경 Studuino 소프트웨어설치 본자료는 Studuino 프로그래밍환경설치안내서입니다. Studuino 프로그래밍 환경의갱신에따라추가 / 수정될수있습니다. 목차 1. 소개... 1 2. Windows... 2 2.1. 프로그래밍환경설치... 2 2.1.1. 웹설치버전설치방법... 2 2.2. Studuino 프로그래밍환경실행...
아이콘의 정의 본 사용자 설명서에서는 다음 아이콘을 사용합니다. 참고 참고는 발생할 수 있는 상황에 대처하는 방법을 알려 주거나 다른 기능과 함께 작동하는 방법에 대한 요령을 제공합니다. 상표 Brother 로고는 Brother Industries, Ltd.의 등록 상
 Android 용 Brother Image Viewer 설명서 버전 0 KOR 아이콘의 정의 본 사용자 설명서에서는 다음 아이콘을 사용합니다. 참고 참고는 발생할 수 있는 상황에 대처하는 방법을 알려 주거나 다른 기능과 함께 작동하는 방법에 대한 요령을 제공합니다. 상표 Brother 로고는 Brother Industries, Ltd.의 등록 상표입니다. Android는
Android 용 Brother Image Viewer 설명서 버전 0 KOR 아이콘의 정의 본 사용자 설명서에서는 다음 아이콘을 사용합니다. 참고 참고는 발생할 수 있는 상황에 대처하는 방법을 알려 주거나 다른 기능과 함께 작동하는 방법에 대한 요령을 제공합니다. 상표 Brother 로고는 Brother Industries, Ltd.의 등록 상표입니다. Android는
게임 기획서 표준양식 연구보고서
 ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ
ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ
Windows 8에서 BioStar 1 설치하기
 / 콘텐츠 테이블... PC에 BioStar 1 설치 방법... Microsoft SQL Server 2012 Express 설치하기... Running SQL 2012 Express Studio... DBSetup.exe 설정하기... BioStar 서버와 클라이언트 시작하기... 1 1 2 2 6 7 1/11 BioStar 1, Windows 8 BioStar
/ 콘텐츠 테이블... PC에 BioStar 1 설치 방법... Microsoft SQL Server 2012 Express 설치하기... Running SQL 2012 Express Studio... DBSetup.exe 설정하기... BioStar 서버와 클라이언트 시작하기... 1 1 2 2 6 7 1/11 BioStar 1, Windows 8 BioStar
Microsoft Word - windows server 2003 수동설치_non pro support_.doc
 Windows Server 2003 수동 설치 가이드 INDEX 운영체제 설치 준비과정 1 드라이버를 위한 플로피 디스크 작성 2 드라이버를 위한 USB 메모리 작성 7 운영체제 설치 과정 14 Boot Sequence 변경 14 컨트롤러 드라이버 수동 설치 15 운영체제 설치 17 운영체제 설치 준비 과정 Windows Server 2003 에는 기본적으로
Windows Server 2003 수동 설치 가이드 INDEX 운영체제 설치 준비과정 1 드라이버를 위한 플로피 디스크 작성 2 드라이버를 위한 USB 메모리 작성 7 운영체제 설치 과정 14 Boot Sequence 변경 14 컨트롤러 드라이버 수동 설치 15 운영체제 설치 17 운영체제 설치 준비 과정 Windows Server 2003 에는 기본적으로
메뉴얼41페이지-2
 데이터 기반 맞춤형 성장관리 솔루션 스마트빌 플러스 은행계좌등록 은행계좌를 조회하여 등록합니다. 신용카드등록 신용카드를 조회하여 등록합니다. 금융정보 자동수집을 위하여 인증서이름, 아이디, 비밀번호를 등록합니다. 통합 자동 수집 금융정보 통합 자동수집을 실행합니다 은행계좌등록 은행계좌를 조회하여 등록합니다. 신용카드등록 신용카드를 조회하여
데이터 기반 맞춤형 성장관리 솔루션 스마트빌 플러스 은행계좌등록 은행계좌를 조회하여 등록합니다. 신용카드등록 신용카드를 조회하여 등록합니다. 금융정보 자동수집을 위하여 인증서이름, 아이디, 비밀번호를 등록합니다. 통합 자동 수집 금융정보 통합 자동수집을 실행합니다 은행계좌등록 은행계좌를 조회하여 등록합니다. 신용카드등록 신용카드를 조회하여
IRISCard Anywhere 5
 이 빠른 사용자 가이드는 IRISCard Anywhere 5 및 IRISCard Corporate 5 스캐너의 설치와 시작을 도와 드립니다. 이 스캐너와 함께 제공되는 소프트웨어는: - Cardiris Pro 5 및 Cardiris Corporate 5 for CRM (Windows 용) - Cardiris Pro 4 (Mac OS 용) Cardiris 의
이 빠른 사용자 가이드는 IRISCard Anywhere 5 및 IRISCard Corporate 5 스캐너의 설치와 시작을 도와 드립니다. 이 스캐너와 함께 제공되는 소프트웨어는: - Cardiris Pro 5 및 Cardiris Corporate 5 for CRM (Windows 용) - Cardiris Pro 4 (Mac OS 용) Cardiris 의
System Recovery 사용자 매뉴얼
 Samsung OS Recovery Solution 을이용하여간편하게 MagicInfo 의네트워크를설정하고시스템을백업및복원할수있습니다. 시스템시작시리모컨의 - 버튼이나키보드의 F3 키를연속해서누르면복구모드로진입한후 Samsung OS Recovery Solution 이실행됩니다. Samsung OS Recovery Solution 은키보드와리모컨을사용하여조작할수있습니다.
Samsung OS Recovery Solution 을이용하여간편하게 MagicInfo 의네트워크를설정하고시스템을백업및복원할수있습니다. 시스템시작시리모컨의 - 버튼이나키보드의 F3 키를연속해서누르면복구모드로진입한후 Samsung OS Recovery Solution 이실행됩니다. Samsung OS Recovery Solution 은키보드와리모컨을사용하여조작할수있습니다.
BY-FDP-4-70.hwp
 RS-232, RS485 FND Display Module BY-FDP-4-70-XX (Rev 1.0) - 1 - 1. 개요. 본 Display Module은 RS-232, RS-485 겸용입니다. Power : DC24V, DC12V( 주문사양). Max Current : 0.6A 숫자크기 : 58mm(FND Size : 70x47mm 4 개) RS-232,
RS-232, RS485 FND Display Module BY-FDP-4-70-XX (Rev 1.0) - 1 - 1. 개요. 본 Display Module은 RS-232, RS-485 겸용입니다. Power : DC24V, DC12V( 주문사양). Max Current : 0.6A 숫자크기 : 58mm(FND Size : 70x47mm 4 개) RS-232,
목차 윈도우드라이버 1. 매뉴얼안내 운영체제 (OS) 환경 윈도우드라이버준비 윈도우드라이버설치 Windows XP/Server 2003 에서설치 Serial 또는 Parallel 포트의경우.
 환경 윈도우드라이버준비 윈도우드라이버설치 Windows XP/Server 2003 에서설치 Serial 또는 Parallel 포트의경우.") 소프트웨어매뉴얼 윈도우드라이버 Rev. 3.03 SLP-TX220 / TX223 SLP-TX420 / TX423 SLP-TX400 / TX403 SLP-DX220 / DX223 SLP-DX420 / DX423 SLP-DL410 / DL413 SLP-T400 / T403 SLP-T400R / T403R SLP-D220 / D223 SLP-D420 / D423
소프트웨어매뉴얼 윈도우드라이버 Rev. 3.03 SLP-TX220 / TX223 SLP-TX420 / TX423 SLP-TX400 / TX403 SLP-DX220 / DX223 SLP-DX420 / DX423 SLP-DL410 / DL413 SLP-T400 / T403 SLP-T400R / T403R SLP-D220 / D223 SLP-D420 / D423
6. 설치가시작되는동안 USB 드라이버가자동으로로드됩니다. USB 드라이버가성공적으로로드되면 Setup is starting( 설치가시작되는중 )... 화면이표시됩니다. 7. 화면지침에따라 Windows 7 설치를완료합니다. 방법 2: 수정된 Windows 7 ISO
... 화면이표시됩니다. 7. 화면지침에따라 Windows 7 설치를완료합니다. 방법 2: 수정된 Windows 7 ISO") Windows 7 설치및 PCIE RAID 설정정보 DK173 초판 11월 2016 A. Windows 7 및 USB 드라이버설치 칩셋사양에따라 Windows 7 설치중에 USB 키보드 / 마우스를사용하려면시스템에서 USB 드라이버를사전로드해야합니다. 이절에서는 USB 드라이버사전로드방법과 Windows 7 설치방법에대해서설명합니다. 방법 1: SATA ODD
Windows 7 설치및 PCIE RAID 설정정보 DK173 초판 11월 2016 A. Windows 7 및 USB 드라이버설치 칩셋사양에따라 Windows 7 설치중에 USB 키보드 / 마우스를사용하려면시스템에서 USB 드라이버를사전로드해야합니다. 이절에서는 USB 드라이버사전로드방법과 Windows 7 설치방법에대해서설명합니다. 방법 1: SATA ODD
Microsoft Word - PLC제어응용-2차시.doc
 과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
Install stm32cubemx and st-link utility
 STM32CubeMX and ST-LINK Utility for STM32 Development 본문서는 ST Microelectronics 의 ARM Cortex-M 시리즈 Microcontroller 개발을위해제공되는 STM32CubeMX 와 STM32 ST-LINK Utility 프로그램의설치과정을설명합니다. 본문서는 Microsoft Windows 7
STM32CubeMX and ST-LINK Utility for STM32 Development 본문서는 ST Microelectronics 의 ARM Cortex-M 시리즈 Microcontroller 개발을위해제공되는 STM32CubeMX 와 STM32 ST-LINK Utility 프로그램의설치과정을설명합니다. 본문서는 Microsoft Windows 7
PathEye 공식 블로그 다운로드 받으세요!! 지속적으로 업그래이드 됩니다. 여러분의 의견을 주시면 개발에 반영하겠 습니다.
 PathEye Mobile Ver. 0.71b 2009. 3. 17 By PathEye 공식 블로그 다운로드 받으세요!! http://blog.patheye.com 지속적으로 업그래이드 됩니다. 여러분의 의견을 주시면 개발에 반영하겠 습니다. PathEye 설치 1/3 최종 배포 버전을 다 운로드 받습니다. 다운로드된 파일은 CAB 파일입니다. CAB 파일에는
PathEye Mobile Ver. 0.71b 2009. 3. 17 By PathEye 공식 블로그 다운로드 받으세요!! http://blog.patheye.com 지속적으로 업그래이드 됩니다. 여러분의 의견을 주시면 개발에 반영하겠 습니다. PathEye 설치 1/3 최종 배포 버전을 다 운로드 받습니다. 다운로드된 파일은 CAB 파일입니다. CAB 파일에는
Microsoft Word - ntasFrameBuilderInstallGuide2.5.doc
 NTAS and FRAME BUILDER Install Guide NTAS and FRAME BUILDER Version 2.5 Copyright 2003 Ari System, Inc. All Rights reserved. NTAS and FRAME BUILDER are trademarks or registered trademarks of Ari System,
NTAS and FRAME BUILDER Install Guide NTAS and FRAME BUILDER Version 2.5 Copyright 2003 Ari System, Inc. All Rights reserved. NTAS and FRAME BUILDER are trademarks or registered trademarks of Ari System,
PowerPoint 프레젠테이션
 실습 1 배효철 th1g@nate.com 1 목차 조건문 반복문 System.out 구구단 모양만들기 Up & Down 2 조건문 조건문의종류 If, switch If 문 조건식결과따라중괄호 { 블록을실행할지여부결정할때사용 조건식 true 또는 false값을산출할수있는연산식 boolean 변수 조건식이 true이면블록실행하고 false 이면블록실행하지않음 3
실습 1 배효철 th1g@nate.com 1 목차 조건문 반복문 System.out 구구단 모양만들기 Up & Down 2 조건문 조건문의종류 If, switch If 문 조건식결과따라중괄호 { 블록을실행할지여부결정할때사용 조건식 true 또는 false값을산출할수있는연산식 boolean 변수 조건식이 true이면블록실행하고 false 이면블록실행하지않음 3
Office 365 사용자 가이드
 [ 여기에입력 ] Office 365 사용자가이드 OFFICE 365 모바일설정 목차 1. 모바일에메일계정추가하기... 2 2. Lync 2013 App 설치하기... 7 3. Office Mobile App 설치하기... 10 4. Office for ipad 설치하기... 16-1 - 모바일기기에 Office 365 를설정해보세요. 모바일기기에 Office
[ 여기에입력 ] Office 365 사용자가이드 OFFICE 365 모바일설정 목차 1. 모바일에메일계정추가하기... 2 2. Lync 2013 App 설치하기... 7 3. Office Mobile App 설치하기... 10 4. Office for ipad 설치하기... 16-1 - 모바일기기에 Office 365 를설정해보세요. 모바일기기에 Office
KMC.xlsm
 제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
Index 1. Intro Install Connect Scratch 1.4 (Offline Editor) Scratch 2.0 (Online Editor) Connect f
 Scratch 2.0 (Online Editor) Connect f") Scratch 호환 센서 보드 SKY SSB 설정 메뉴얼 1st of April 2016 Techdine Index 1. Intro... 03 2. Install... 04 3. Connect... 06 3-1. Scratch 1.4 (Offline Editor)... 06 3-2. Scratch 2.0 (Online Editor)... 09 3-2-1. Connect
Scratch 호환 센서 보드 SKY SSB 설정 메뉴얼 1st of April 2016 Techdine Index 1. Intro... 03 2. Install... 04 3. Connect... 06 3-1. Scratch 1.4 (Offline Editor)... 06 3-2. Scratch 2.0 (Online Editor)... 09 3-2-1. Connect
사용설명서를 읽기 전에 ios용 아이디스 모바일은 네트워크 연결을 통해 ios 플랫폼 기반의 모바일 기기(iOS 버전 6.0 이상의 ipod Touch, iphone 또는 ipad)에서 장치(DVR, 네트워크 비디오 서버 및 네트워크 카메라)에 접속하여 원격으로 영상을
에서 장치(DVR, 네트워크 비디오 서버 및 네트워크 카메라)에 접속하여 원격으로 영상을") IDIS Mobile ios 사용설명서 Powered by 사용설명서를 읽기 전에 ios용 아이디스 모바일은 네트워크 연결을 통해 ios 플랫폼 기반의 모바일 기기(iOS 버전 6.0 이상의 ipod Touch, iphone 또는 ipad)에서 장치(DVR, 네트워크 비디오 서버 및 네트워크 카메라)에 접속하여 원격으로 영상을 감시할 수 있는 프로그램입니다.
IDIS Mobile ios 사용설명서 Powered by 사용설명서를 읽기 전에 ios용 아이디스 모바일은 네트워크 연결을 통해 ios 플랫폼 기반의 모바일 기기(iOS 버전 6.0 이상의 ipod Touch, iphone 또는 ipad)에서 장치(DVR, 네트워크 비디오 서버 및 네트워크 카메라)에 접속하여 원격으로 영상을 감시할 수 있는 프로그램입니다.
<4F E20C7C1B7CEB1D7B7A5C0BB20C0CCBFEBC7D120B5A5C0CCC5CD20BAD0BCAE20B9D720B1D7B7A1C7C120B1D7B8AEB1E F416E616C F616E645F47726
 Origin 프로그램을이용한데이터분석및그래프그리기 "2-4 단일코일에의해형성되는자기장의특성측정 " 실험을예로하여 Origin 프로그램을이용한데이터분석및그래프그리기에대해설명드리겠습니다. 먼저 www.originlab.com 사이트를방문하여회원가입후 Origin 프로그램데모버전을다운로드받아서설치합니다. 설치에필요한액세스코드는회원가입시입력한 e-mail로발송됩니다.
Origin 프로그램을이용한데이터분석및그래프그리기 "2-4 단일코일에의해형성되는자기장의특성측정 " 실험을예로하여 Origin 프로그램을이용한데이터분석및그래프그리기에대해설명드리겠습니다. 먼저 www.originlab.com 사이트를방문하여회원가입후 Origin 프로그램데모버전을다운로드받아서설치합니다. 설치에필요한액세스코드는회원가입시입력한 e-mail로발송됩니다.
Microsoft PowerPoint Android-SDK설치.HelloAndroid(1.0h).pptx
.pptx") To be an Android Expert 문양세강원대학교 IT 대학컴퓨터학부 Eclipse (IDE) JDK Android SDK with ADT IDE: Integrated Development Environment JDK: Java Development Kit (Java SDK) ADT: Android Development Tools 2 JDK 설치 Eclipse
To be an Android Expert 문양세강원대학교 IT 대학컴퓨터학부 Eclipse (IDE) JDK Android SDK with ADT IDE: Integrated Development Environment JDK: Java Development Kit (Java SDK) ADT: Android Development Tools 2 JDK 설치 Eclipse
SBR-100S User Manual
 ( 1 / 13 ) SBR-100S 모델에 대한 사용자 펌웨어 업그레이드 방법을 안내해 드립니다. SBR-100S 는 신규 펌웨어가 있을시 FOTA(자동업데이트) 기능을 통하여 자동 업그레이드가 되며, 필요시 사용자가 신규 펌웨어를 다운받아 수동으로 업그레이드 할 수 있습니다. 1. 준비하기 1.1 연결 장치 준비 펌웨어 업그레이드를 위해서는 SBR-100S
( 1 / 13 ) SBR-100S 모델에 대한 사용자 펌웨어 업그레이드 방법을 안내해 드립니다. SBR-100S 는 신규 펌웨어가 있을시 FOTA(자동업데이트) 기능을 통하여 자동 업그레이드가 되며, 필요시 사용자가 신규 펌웨어를 다운받아 수동으로 업그레이드 할 수 있습니다. 1. 준비하기 1.1 연결 장치 준비 펌웨어 업그레이드를 위해서는 SBR-100S
Infinity(∞) Strategy
 Strategy") 반복제어 표월성 passwd74@cherub.sungkyul.edu 개요 for() 문 break문과 continue문 while문 do-while문 for() 문 for() 문형식 for( 표현식1; 표현식2; 표현식3) 여러문장들 ; 표현식 1 : 초기화 (1 번만수행 ) 표현식 2 : 반복문수행조건 ( 없으면무한반복 ) 표현식 3 : 반복문수행횟수 for()
반복제어 표월성 passwd74@cherub.sungkyul.edu 개요 for() 문 break문과 continue문 while문 do-while문 for() 문 for() 문형식 for( 표현식1; 표현식2; 표현식3) 여러문장들 ; 표현식 1 : 초기화 (1 번만수행 ) 표현식 2 : 반복문수행조건 ( 없으면무한반복 ) 표현식 3 : 반복문수행횟수 for()
Microsoft Word - Armjtag_문서1.doc
 ARM JTAG (wiggler 호환 ) 사용방법 ( IAR EWARM 에서 ARM-JTAG 로 Debugging 하기 ) Test Board : AT91SAM7S256 IAR EWARM : Kickstart for ARM ARM-JTAG : ver 1.0 ( 씨링크테크 ) 1. IAR EWARM (Kickstart for ARM) 설치 2. Macraigor
ARM JTAG (wiggler 호환 ) 사용방법 ( IAR EWARM 에서 ARM-JTAG 로 Debugging 하기 ) Test Board : AT91SAM7S256 IAR EWARM : Kickstart for ARM ARM-JTAG : ver 1.0 ( 씨링크테크 ) 1. IAR EWARM (Kickstart for ARM) 설치 2. Macraigor
경우 1) 80GB( 원본 ) => 2TB( 복사본 ), 원본 80GB 는 MBR 로디스크초기화하고 NTFS 로포맷한경우 복사본 HDD 도 MBR 로디스크초기화되고 80GB 만큼포맷되고나머지영역 (80GB~ 나머지부분 ) 은할당되지않음 으로나온다. A. Window P
 80GB( 원본 ) => 2TB( 복사본 ), 원본 80GB 는 MBR 로디스크초기화하고 NTFS 로포맷한경우 복사본 HDD 도 MBR 로디스크초기화되고 80GB 만큼포맷되고나머지영역 (80GB~ 나머지부분 ) 은할당되지않음 으로나온다. A. Window P") Duplicator 는기본적으로원본하드디스크를빠르게복사본하드디스크에복사하는기능을하는것입니다.. 복사본 하드디스크가원본하드디스크와똑같게하는것을목적으로하는것이어서저용량에서고용량으로복사시몇 가지문제점이발생할수있습니다. 하드디스크는사용하려면, 디스크초기화를한후에포맷을해야사용가능합니다. Windows PC는 MBR과 GPT 2 개중에 1개로초기화합니다. -Windows
Duplicator 는기본적으로원본하드디스크를빠르게복사본하드디스크에복사하는기능을하는것입니다.. 복사본 하드디스크가원본하드디스크와똑같게하는것을목적으로하는것이어서저용량에서고용량으로복사시몇 가지문제점이발생할수있습니다. 하드디스크는사용하려면, 디스크초기화를한후에포맷을해야사용가능합니다. Windows PC는 MBR과 GPT 2 개중에 1개로초기화합니다. -Windows
<BFACBDC0B9AEC1A6C7AEC0CC5F F E687770>
 IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
tiawPlot ac 사용방법
 tiawplot ac 매뉴얼 BORISOFT www.borisoft.co.kr park.ji@borisoft.co.kr HP : 00-370-077 Chapter 프로그램설치. 프로그램설치 3 2 Chapter tiawplot ac 사용하기.tiawPlot ac 소개 2.tiawPlot ac 실행하기 3. 도면파일등록및삭제 4. 출력장치설정 5. 출력옵션설정
tiawplot ac 매뉴얼 BORISOFT www.borisoft.co.kr park.ji@borisoft.co.kr HP : 00-370-077 Chapter 프로그램설치. 프로그램설치 3 2 Chapter tiawplot ac 사용하기.tiawPlot ac 소개 2.tiawPlot ac 실행하기 3. 도면파일등록및삭제 4. 출력장치설정 5. 출력옵션설정
Microsoft Word - src.doc
 IPTV 서비스탐색및콘텐츠가이드 RI 시스템운용매뉴얼 목차 1. 서버설정방법... 5 1.1. 서비스탐색서버설정... 5 1.2. 컨텐츠가이드서버설정... 6 2. 서버운용방법... 7 2.1. 서비스탐색서버운용... 7 2.1.1. 서비스가이드서버실행... 7 2.1.2. 서비스가이드정보확인... 8 2.1.3. 서비스가이드정보추가... 9 2.1.4. 서비스가이드정보삭제...
IPTV 서비스탐색및콘텐츠가이드 RI 시스템운용매뉴얼 목차 1. 서버설정방법... 5 1.1. 서비스탐색서버설정... 5 1.2. 컨텐츠가이드서버설정... 6 2. 서버운용방법... 7 2.1. 서비스탐색서버운용... 7 2.1.1. 서비스가이드서버실행... 7 2.1.2. 서비스가이드정보확인... 8 2.1.3. 서비스가이드정보추가... 9 2.1.4. 서비스가이드정보삭제...
목차 1. 시스템요구사항 암호및힌트설정 ( 윈도우 ) JetFlash Vault 시작하기 ( 윈도우 ) JetFlash Vault 옵션 ( 윈도우 )... 9 JetFlash Vault 설정... 9 JetFlash Vault
 JetFlash Vault 시작하기 ( 윈도우 ) JetFlash Vault 옵션 ( 윈도우 )... 9 JetFlash Vault 설정... 9 JetFlash Vault") 사용자매뉴얼 JetFlash Vault 100 ( 버전 1.0) 1 목차 1. 시스템요구사항... 3 2. 암호및힌트설정 ( 윈도우 )... 3 3. JetFlash Vault 시작하기 ( 윈도우 )... 7 4. JetFlash Vault 옵션 ( 윈도우 )... 9 JetFlash Vault 설정... 9 JetFlash Vault 찾아보기... 10 JetFlash
사용자매뉴얼 JetFlash Vault 100 ( 버전 1.0) 1 목차 1. 시스템요구사항... 3 2. 암호및힌트설정 ( 윈도우 )... 3 3. JetFlash Vault 시작하기 ( 윈도우 )... 7 4. JetFlash Vault 옵션 ( 윈도우 )... 9 JetFlash Vault 설정... 9 JetFlash Vault 찾아보기... 10 JetFlash
<4D F736F F F696E74202D203137C0E55FBFACBDC0B9AEC1A6BCD6B7E7BCC72E707074>
 SIMATIC S7 Siemens AG 2004. All rights reserved. Date: 22.03.2006 File: PRO1_17E.1 차례... 2 심벌리스트... 3 Ch3 Ex2: 프로젝트생성...... 4 Ch3 Ex3: S7 프로그램삽입... 5 Ch3 Ex4: 표준라이브러리에서블록복사... 6 Ch4 Ex1: 실제구성을 PG 로업로드하고이름변경......
SIMATIC S7 Siemens AG 2004. All rights reserved. Date: 22.03.2006 File: PRO1_17E.1 차례... 2 심벌리스트... 3 Ch3 Ex2: 프로젝트생성...... 4 Ch3 Ex3: S7 프로그램삽입... 5 Ch3 Ex4: 표준라이브러리에서블록복사... 6 Ch4 Ex1: 실제구성을 PG 로업로드하고이름변경......
PowerPoint 프레젠테이션
 Chapter 06 반복문 01 반복문의필요성 02 for문 03 while문 04 do~while문 05 기타제어문 반복문의의미와필요성을이해한다. 대표적인반복문인 for 문, while 문, do~while 문의작성법을 알아본다. 1.1 반복문의필요성 반복문 동일한내용을반복하거나일정한규칙으로반복하는일을수행할때사용 프로그램을좀더간결하고실제적으로작성할수있음.
Chapter 06 반복문 01 반복문의필요성 02 for문 03 while문 04 do~while문 05 기타제어문 반복문의의미와필요성을이해한다. 대표적인반복문인 for 문, while 문, do~while 문의작성법을 알아본다. 1.1 반복문의필요성 반복문 동일한내용을반복하거나일정한규칙으로반복하는일을수행할때사용 프로그램을좀더간결하고실제적으로작성할수있음.
목 차 1. 드라이버 설치...3 1.1 설치환경...3 1.2 드라이버 설치 시 주의사항...3 1.3 USB 드라이버 파일...3 1.4 Windows XP에서 설치...4 1.5 Windows Vista / Windows 7에서 설치...7 1.6 Windows
 삼성SDS 하이패스 USB 드라이버 설치 매뉴얼 삼성SDS(주) 목 차 1. 드라이버 설치...3 1.1 설치환경...3 1.2 드라이버 설치 시 주의사항...3 1.3 USB 드라이버 파일...3 1.4 Windows XP에서 설치...4 1.5 Windows Vista / Windows 7에서 설치...7 1.6 Windows 8에서 설치...9 2. 드라이버
삼성SDS 하이패스 USB 드라이버 설치 매뉴얼 삼성SDS(주) 목 차 1. 드라이버 설치...3 1.1 설치환경...3 1.2 드라이버 설치 시 주의사항...3 1.3 USB 드라이버 파일...3 1.4 Windows XP에서 설치...4 1.5 Windows Vista / Windows 7에서 설치...7 1.6 Windows 8에서 설치...9 2. 드라이버
Microsoft PowerPoint - gnu-w06-python_[실습]_day13-turtle-shape
![Microsoft PowerPoint - gnu-w06-python_[실습]_day13-turtle-shape](/thumbs/92/108999084.jpg "Microsoft PowerPoint - gnu-w06-python_[실습]_day13-turtle-shape") DAY 13 거북이그래픽응용하기 모두의파이썬 20 일만에배우는프로그래밍기초 거북이그래픽응용하기 01 자주사용하는거북이그래픽명령어 02 03 키보드로거북이를조종해서그림그리기 마우스로거북이를조종해서그림그리기 2 1. 자주사용하는거북이그래픽명령어 자주사용하는거북이그래픽명령어 2 함수설명사용예 pos( ) / position( ) xcor( ), ycor( ) goto(x,
DAY 13 거북이그래픽응용하기 모두의파이썬 20 일만에배우는프로그래밍기초 거북이그래픽응용하기 01 자주사용하는거북이그래픽명령어 02 03 키보드로거북이를조종해서그림그리기 마우스로거북이를조종해서그림그리기 2 1. 자주사용하는거북이그래픽명령어 자주사용하는거북이그래픽명령어 2 함수설명사용예 pos( ) / position( ) xcor( ), ycor( ) goto(x,
NTD36HD Manual
 Upnp 사용 D7 은 UPNP 를지원하여 D7 의네크워크에연결된 UPNP 기기에별다른설정없이연결하여, 유무선으로네트워크상의연결된 UPNP 기기의콘텐츠를재생할수있습니다. TV 화면의 브라우저, UPNP 를선택하면연결가능한 UPNP 기기가표시됩니다. 주의 - UPNP 기능사용시연결된 UPNP 기기의성능에따라서재생되지않는콘텐츠가있을수있습니다. NFS 사용 D7
Upnp 사용 D7 은 UPNP 를지원하여 D7 의네크워크에연결된 UPNP 기기에별다른설정없이연결하여, 유무선으로네트워크상의연결된 UPNP 기기의콘텐츠를재생할수있습니다. TV 화면의 브라우저, UPNP 를선택하면연결가능한 UPNP 기기가표시됩니다. 주의 - UPNP 기능사용시연결된 UPNP 기기의성능에따라서재생되지않는콘텐츠가있을수있습니다. NFS 사용 D7
사용설명서를 읽기 전에 안드로이드(Android)용 아이디스 모바일은 네트워크 연결을 통해 안드로이드 플랫폼 기반의 모바일 기기에서 장치 (DVR, NVR, 네트워크 비디오 서버, 네트워크 카메라) 에 접속하여 원격으로 영상을 감시할 수 있는 프로그램입니다. 장치의 사
용 아이디스 모바일은 네트워크 연결을 통해 안드로이드 플랫폼 기반의 모바일 기기에서 장치 (DVR, NVR, 네트워크 비디오 서버, 네트워크 카메라) 에 접속하여 원격으로 영상을 감시할 수 있는 프로그램입니다. 장치의 사") IDIS Mobile Android 사용설명서 Powered by 사용설명서를 읽기 전에 안드로이드(Android)용 아이디스 모바일은 네트워크 연결을 통해 안드로이드 플랫폼 기반의 모바일 기기에서 장치 (DVR, NVR, 네트워크 비디오 서버, 네트워크 카메라) 에 접속하여 원격으로 영상을 감시할 수 있는 프로그램입니다. 장치의 사양 및 버전에 따라 일부
IDIS Mobile Android 사용설명서 Powered by 사용설명서를 읽기 전에 안드로이드(Android)용 아이디스 모바일은 네트워크 연결을 통해 안드로이드 플랫폼 기반의 모바일 기기에서 장치 (DVR, NVR, 네트워크 비디오 서버, 네트워크 카메라) 에 접속하여 원격으로 영상을 감시할 수 있는 프로그램입니다. 장치의 사양 및 버전에 따라 일부
EEAP - Proposal Template
 제품 : ArcGIS Online 제작일 : 2019 년 01 월 31 일 제작 : 개요 본문서는 ArcGIS Online 구독활성화방법대한한국에스리기술문서입니다. ArcGIS Desktop 을구매한지 1 년이내이거나유지보수중인고객은구매후워런티기간또는유지보수기간동안 ArcGIS Online 을무료로사용하실수있으며일정량의크레딧을제공받습니다. 본문서는무료로제공받은
제품 : ArcGIS Online 제작일 : 2019 년 01 월 31 일 제작 : 개요 본문서는 ArcGIS Online 구독활성화방법대한한국에스리기술문서입니다. ArcGIS Desktop 을구매한지 1 년이내이거나유지보수중인고객은구매후워런티기간또는유지보수기간동안 ArcGIS Online 을무료로사용하실수있으며일정량의크레딧을제공받습니다. 본문서는무료로제공받은
*Revision History 날짜 내용 최초작성 Tel Fax [2] page
![*Revision History 날짜 내용 최초작성 Tel Fax [2] page](/thumbs/87/95015203.jpg "*Revision History 날짜 내용 최초작성 Tel Fax [2] page") MSP430-SDS100i 매뉴얼 V1.0 Tel. 031-781-2812 Fax. 031-706-2834 E-mail. dsptools@syncworks.co.kr [1] page *Revision History 날짜 내용 2013. 07. 010 최초작성 Tel. 031-781-2812 Fax. 031-706-2834 E-mail. dsptools@syncworks.co.kr
MSP430-SDS100i 매뉴얼 V1.0 Tel. 031-781-2812 Fax. 031-706-2834 E-mail. dsptools@syncworks.co.kr [1] page *Revision History 날짜 내용 2013. 07. 010 최초작성 Tel. 031-781-2812 Fax. 031-706-2834 E-mail. dsptools@syncworks.co.kr
Oracle VM VirtualBox 설치 VirtualBox에서 가상머신 설치 가상머신에 Ubuntu 설치
 Oracle VM VirtualBox 설치 VirtualBox에서 가상머신 설치 가상머신에 Ubuntu 설치 VirtualBox를 사용하기 위해서는 일단 https://www.virtualbox.org/wiki/downloads 사이트에서 윈도우용 버추얼박스 설치화일을 다운로드 해야합니다. Ubuntu를 사용하기 위해서는 Ubuntu 디스크 이미지 화일을 다운로드
Oracle VM VirtualBox 설치 VirtualBox에서 가상머신 설치 가상머신에 Ubuntu 설치 VirtualBox를 사용하기 위해서는 일단 https://www.virtualbox.org/wiki/downloads 사이트에서 윈도우용 버추얼박스 설치화일을 다운로드 해야합니다. Ubuntu를 사용하기 위해서는 Ubuntu 디스크 이미지 화일을 다운로드
윈도우즈프로그래밍(1)
") 제어문 (2) For~Next 문 윈도우즈프로그래밍 (1) ( 신흥대학교컴퓨터정보계열 ) 2/17 Contents 학습목표 프로그램에서주어진특정문장을부분을일정횟수만큼반복해서실행하는문장으로 For~Next 문등의구조를이해하고활용할수있다. 내용 For~Next 문 다중 For 문 3/17 제어문 - FOR 문 반복문 : 프로그램에서주어진특정문장들을일정한횟수만큼반복해서실행하는문장
제어문 (2) For~Next 문 윈도우즈프로그래밍 (1) ( 신흥대학교컴퓨터정보계열 ) 2/17 Contents 학습목표 프로그램에서주어진특정문장을부분을일정횟수만큼반복해서실행하는문장으로 For~Next 문등의구조를이해하고활용할수있다. 내용 For~Next 문 다중 For 문 3/17 제어문 - FOR 문 반복문 : 프로그램에서주어진특정문장들을일정한횟수만큼반복해서실행하는문장
JAVA 프로그래밍실습 실습 1) 실습목표 - 메소드개념이해하기 - 매개변수이해하기 - 새메소드만들기 - Math 클래스의기존메소드이용하기 ( ) 문제 - 직사각형모양의땅이있다. 이땅의둘레, 면적과대각
 실습목표 - 메소드개념이해하기 - 매개변수이해하기 - 새메소드만들기 - Math 클래스의기존메소드이용하기 ( ) 문제 - 직사각형모양의땅이있다. 이땅의둘레, 면적과대각") JAVA 프로그래밍실습 실습 1) 실습목표 - 메소드개념이해하기 - 매개변수이해하기 - 새메소드만들기 - Math 클래스의기존메소드이용하기 ( http://java.sun.com/javase/6/docs/api ) 문제 - 직사각형모양의땅이있다. 이땅의둘레, 면적과대각선의길이를계산하는메소드들을작성하라. 직사각형의가로와세로의길이는주어진다. 대각선의길이는 Math클래스의적절한메소드를이용하여구하라.
JAVA 프로그래밍실습 실습 1) 실습목표 - 메소드개념이해하기 - 매개변수이해하기 - 새메소드만들기 - Math 클래스의기존메소드이용하기 ( http://java.sun.com/javase/6/docs/api ) 문제 - 직사각형모양의땅이있다. 이땅의둘레, 면적과대각선의길이를계산하는메소드들을작성하라. 직사각형의가로와세로의길이는주어진다. 대각선의길이는 Math클래스의적절한메소드를이용하여구하라.
SMT-1722-1922-Kor.indd
 SMT-2231 사용 설명서 첨부물 포장상자 개봉 후 제품은 튼튼하고 평평한 곳이나 설치장소에 놓고, 다음 내용물이 전부 있는지 체크하세요. TFT LCD 모니터 리모컨&건전지 VGA 신호케이블 전원코드 모니터 설치안내서 사용설명 CD 조작부 설명 전면조작부 적외선 센서 리모컨 센서 수신부 / PIP 동작중인 기능의 레벨증가 및 OSD메뉴 선택합니다.
SMT-2231 사용 설명서 첨부물 포장상자 개봉 후 제품은 튼튼하고 평평한 곳이나 설치장소에 놓고, 다음 내용물이 전부 있는지 체크하세요. TFT LCD 모니터 리모컨&건전지 VGA 신호케이블 전원코드 모니터 설치안내서 사용설명 CD 조작부 설명 전면조작부 적외선 센서 리모컨 센서 수신부 / PIP 동작중인 기능의 레벨증가 및 OSD메뉴 선택합니다.
과목 1 컴퓨팅적사고력과문제해결 1. 친구들의키를비교해보았다. < 보기 > 를참고하여 < 문제 > 의빈칸을완성하시오. (10 점 ) < 보기 > < 키를비교하여서술한내용 > < 문제분해 > 가. 초록이는노랑이보다키가 3cm 더크다. 나. 우리반에서는초록이가제일키가크다.
 < 보기 > < 키를비교하여서술한내용 > < 문제분해 > 가. 초록이는노랑이보다키가 3cm 더크다. 나. 우리반에서는초록이가제일키가크다.") 1. SW 코딩자격 2 급샘플문항 ( 스크래치버전 ) 시험지 SW 코딩자격 (2 급 ) - Software Coding and Computing Test - SW 시험시간급수응시일수험번호성명 Scratch 2.0 45 분 2 년월일... 수험자유의사항 수험자는감독관의안내에따라문제지와시험용 SW 등의이상여부를확인해야합니다. 시험지는시험이끝난후답안지와함께제출해야하며,
1. SW 코딩자격 2 급샘플문항 ( 스크래치버전 ) 시험지 SW 코딩자격 (2 급 ) - Software Coding and Computing Test - SW 시험시간급수응시일수험번호성명 Scratch 2.0 45 분 2 년월일... 수험자유의사항 수험자는감독관의안내에따라문제지와시험용 SW 등의이상여부를확인해야합니다. 시험지는시험이끝난후답안지와함께제출해야하며,
Endpoint Protector - Active Directory Deployment Guide
 Version 1.0.0.1 Active Directory 배포가이드 I Endpoint Protector Active Directory Deployment Guide 목차 1. 소개...1 2. WMI 필터생성... 2 3. EPP 배포 GPO 생성... 9 4. 각각의 GPO 에해당하는 WMI 연결... 12 5.OU 에 GPO 연결... 14 6. 중요공지사항
Version 1.0.0.1 Active Directory 배포가이드 I Endpoint Protector Active Directory Deployment Guide 목차 1. 소개...1 2. WMI 필터생성... 2 3. EPP 배포 GPO 생성... 9 4. 각각의 GPO 에해당하는 WMI 연결... 12 5.OU 에 GPO 연결... 14 6. 중요공지사항
Microsoft Word - logic2005.doc
 제 8 장 Counters 실험의목표 - Catalog counter 의동작원리에대하여익힌다. - 임의의 counter를통하여 FSM 구현방법을익힌다. - 7-segment display 의동작원리를이해한다. 실험도움자료 1. 7-segment display 7-segment는디지털회로에서숫자를표시하기위하여가장많이사용하는소자이다. 이름에서알수있듯이 7개의 LED(
제 8 장 Counters 실험의목표 - Catalog counter 의동작원리에대하여익힌다. - 임의의 counter를통하여 FSM 구현방법을익힌다. - 7-segment display 의동작원리를이해한다. 실험도움자료 1. 7-segment display 7-segment는디지털회로에서숫자를표시하기위하여가장많이사용하는소자이다. 이름에서알수있듯이 7개의 LED(
Mango-E-Toi Board Developer Manual
 Mango-E-Toi Board Developer Manual http://www.mangoboard.com/ http://cafe.naver.com/embeddedcrazyboys Crazy Embedded Laboratory www.mangoboard.com cafe.naver.com/embeddedcrazyboys CRZ Technology 1 Document
Mango-E-Toi Board Developer Manual http://www.mangoboard.com/ http://cafe.naver.com/embeddedcrazyboys Crazy Embedded Laboratory www.mangoboard.com cafe.naver.com/embeddedcrazyboys CRZ Technology 1 Document
Windows Server 2012
 Windows Server 2012 Shared Nothing Live Migration Shared Nothing Live Migration 은 SMB Live Migration 방식과다른점은 VM 데이터파일의위치입니다. Shared Nothing Live Migration 방식은 Hyper-V 호스트의로컬디스크에 VM 데이터파일이위치합니다. 반면에, SMB
Windows Server 2012 Shared Nothing Live Migration Shared Nothing Live Migration 은 SMB Live Migration 방식과다른점은 VM 데이터파일의위치입니다. Shared Nothing Live Migration 방식은 Hyper-V 호스트의로컬디스크에 VM 데이터파일이위치합니다. 반면에, SMB
OCW_C언어 기초
 초보프로그래머를위한 C 언어기초 4 장 : 연산자 2012 년 이은주 학습목표 수식의개념과연산자및피연산자에대한학습 C 의알아보기 연산자의우선순위와결합방향에대하여알아보기 2 목차 연산자의기본개념 수식 연산자와피연산자 산술연산자 / 증감연산자 관계연산자 / 논리연산자 비트연산자 / 대입연산자연산자의우선순위와결합방향 조건연산자 / 형변환연산자 연산자의우선순위 연산자의결합방향
초보프로그래머를위한 C 언어기초 4 장 : 연산자 2012 년 이은주 학습목표 수식의개념과연산자및피연산자에대한학습 C 의알아보기 연산자의우선순위와결합방향에대하여알아보기 2 목차 연산자의기본개념 수식 연산자와피연산자 산술연산자 / 증감연산자 관계연산자 / 논리연산자 비트연산자 / 대입연산자연산자의우선순위와결합방향 조건연산자 / 형변환연산자 연산자의우선순위 연산자의결합방향
설치 순서 Windows 98 SE/Me/2000/XP 1 PC를 켜고 Windows를 시작합니다. 아직 컴퓨터에 프린터를 연결하지 마십시오. 2 PC에 P-S100 CD-ROM(프 린터 드라이버)을 삽입합니다. 3 설치 프로그램을 시작합니다. q CD-ROM의 PS1
을 삽입합니다. 3 설치 프로그램을 시작합니다. q CD-ROM의 PS1") 디지털 사진 프린터 P-S100 프린터 드라이버 설치 가이드 사용하는 컴퓨터에 따라 제공된 프린터 드라이버를 설치합니다. 설치 절차 에 대한 자세한 내용은 CD-ROM의 Readme 파일을 참조하십시오. 작동 환경 Windows 호환 모델: IBM PC/AT 및 호환품 운영 체제: Windows 98 SE/Me/2000/XP (Windows 98 SE/Me/2000/XP
디지털 사진 프린터 P-S100 프린터 드라이버 설치 가이드 사용하는 컴퓨터에 따라 제공된 프린터 드라이버를 설치합니다. 설치 절차 에 대한 자세한 내용은 CD-ROM의 Readme 파일을 참조하십시오. 작동 환경 Windows 호환 모델: IBM PC/AT 및 호환품 운영 체제: Windows 98 SE/Me/2000/XP (Windows 98 SE/Me/2000/XP
Mango-IMX6Q mfgtool을 이용한 이미지 Write하기
 Mango-IMX6Q mfgtool 을 이용한이미지 Write 하기 http://www.mangoboard.com/ http://cafe.naver.com/embeddedcrazyboys Crazy Embedded Laboratory www.mangoboard.com cafe.naver.com/embeddedcrazyboys CRZ Technology 1 Document
Mango-IMX6Q mfgtool 을 이용한이미지 Write 하기 http://www.mangoboard.com/ http://cafe.naver.com/embeddedcrazyboys Crazy Embedded Laboratory www.mangoboard.com cafe.naver.com/embeddedcrazyboys CRZ Technology 1 Document
MLB 2K9_PS3_MN
 목차 시작하기 전에...2 시작하기 전에...3 조작법...4 메뉴 조작법...4 게임 조작법...4 주 메뉴...10 2K NAV 메뉴...10 실제 로스터...11 2K 공유...11...11 시작하기 전에 시작하기 전에 무선 컨트롤러의 구성 게임 시작하기 시작하기 전에 PLAYSTATION 3 본체에 동봉된 사용설명서를 충분히 읽어보십시오. 사용설명서에는
목차 시작하기 전에...2 시작하기 전에...3 조작법...4 메뉴 조작법...4 게임 조작법...4 주 메뉴...10 2K NAV 메뉴...10 실제 로스터...11 2K 공유...11...11 시작하기 전에 시작하기 전에 무선 컨트롤러의 구성 게임 시작하기 시작하기 전에 PLAYSTATION 3 본체에 동봉된 사용설명서를 충분히 읽어보십시오. 사용설명서에는
Microsoft PowerPoint - e pptx
 Import/Export Data Using VBA Objectives Referencing Excel Cells in VBA Importing Data from Excel to VBA Using VBA to Modify Contents of Cells 새서브프로시저작성하기 프로시저실행하고결과확인하기 VBA 코드이해하기 Referencing Excel Cells
Import/Export Data Using VBA Objectives Referencing Excel Cells in VBA Importing Data from Excel to VBA Using VBA to Modify Contents of Cells 새서브프로시저작성하기 프로시저실행하고결과확인하기 VBA 코드이해하기 Referencing Excel Cells
Microsoft PowerPoint - chap06-2pointer.ppt
 2010-1 학기프로그래밍입문 (1) chapter 06-2 참고자료 포인터 박종혁 Tel: 970-6702 Email: jhpark1@snut.ac.kr 한빛미디어 출처 : 뇌를자극하는 C프로그래밍, 한빛미디어 -1- 포인터의정의와사용 변수를선언하는것은메모리에기억공간을할당하는것이며할당된이후에는변수명으로그기억공간을사용한다. 할당된기억공간을사용하는방법에는변수명외에메모리의실제주소값을사용하는것이다.
2010-1 학기프로그래밍입문 (1) chapter 06-2 참고자료 포인터 박종혁 Tel: 970-6702 Email: jhpark1@snut.ac.kr 한빛미디어 출처 : 뇌를자극하는 C프로그래밍, 한빛미디어 -1- 포인터의정의와사용 변수를선언하는것은메모리에기억공간을할당하는것이며할당된이후에는변수명으로그기억공간을사용한다. 할당된기억공간을사용하는방법에는변수명외에메모리의실제주소값을사용하는것이다.
vRealize Automation용 VMware Remote Console - VMware
 vrealize Automation 용 VMware Remote Console VMware Remote Console 9.0 이문서는새버전으로교체되기전까지나열된각제품버전및모든이후버전을지원합니다. 이문서에대한최신버전을확인하려면 http://www.vmware.com/kr/support/pubs 를참조하십시오. KO-002230-00 vrealize Automation
vrealize Automation 용 VMware Remote Console VMware Remote Console 9.0 이문서는새버전으로교체되기전까지나열된각제품버전및모든이후버전을지원합니다. 이문서에대한최신버전을확인하려면 http://www.vmware.com/kr/support/pubs 를참조하십시오. KO-002230-00 vrealize Automation
 정부3.0 국민디자인단 운영을 통해 국민과의 소통과 참여로 정책을 함께 만들 수 있었고 그 결과 국민 눈높이에 맞는 다양한 정책 개선안을 도출하며 정책의 완성도를 제고할 수 있었습니다. 또한 서비스디자인 방법론을 각 기관별 정부3.0 과제에 적용하여 국민 관점의 서비스 설계, 정책고객 확대 등 공직사회에 큰 반향을 유도하여 공무원의 일하는 방식을 변화시키고
정부3.0 국민디자인단 운영을 통해 국민과의 소통과 참여로 정책을 함께 만들 수 있었고 그 결과 국민 눈높이에 맞는 다양한 정책 개선안을 도출하며 정책의 완성도를 제고할 수 있었습니다. 또한 서비스디자인 방법론을 각 기관별 정부3.0 과제에 적용하여 국민 관점의 서비스 설계, 정책고객 확대 등 공직사회에 큰 반향을 유도하여 공무원의 일하는 방식을 변화시키고
특징 찾아보기 열쇠 없이 문을 열 수 있어요! 비밀번호 및 RF카드로도 문을 열 수 있습니다. 또한 비밀번호가 외부인에게 알려질 위험에 대비, 통제번호까지 입력해 둘 수 있어 더욱 안심하고 사용할 수 있습니다. 나만의 비밀번호 및 RF카드를 가질 수 있어요! 다수의 가
 www.kdnetwork.com 특징 찾아보기 열쇠 없이 문을 열 수 있어요! 비밀번호 및 RF카드로도 문을 열 수 있습니다. 또한 비밀번호가 외부인에게 알려질 위험에 대비, 통제번호까지 입력해 둘 수 있어 더욱 안심하고 사용할 수 있습니다. 나만의 비밀번호 및 RF카드를 가질 수 있어요! 다수의 가능할 삭제할 건전지 사용자를 위한 개별 비밀번호 및 RF카드
www.kdnetwork.com 특징 찾아보기 열쇠 없이 문을 열 수 있어요! 비밀번호 및 RF카드로도 문을 열 수 있습니다. 또한 비밀번호가 외부인에게 알려질 위험에 대비, 통제번호까지 입력해 둘 수 있어 더욱 안심하고 사용할 수 있습니다. 나만의 비밀번호 및 RF카드를 가질 수 있어요! 다수의 가능할 삭제할 건전지 사용자를 위한 개별 비밀번호 및 RF카드
GBF-1257B 카스블루투스체지방계앱사용매뉴얼
 GBF-1257B 카스블루투스체지방계앱사용매뉴얼 가. 사용 전 준비사항 (1) 기기 뒷면에 있는 밧데리 덮개를 연다. (2) 밧데리를 +/-부분을 올바르게 삽입한다. (3) 밧데리 덮개를 닫고 LCD 표시부가 0 점을 보여줄 때까지 기다린다. (4) 원하는 단위를 선택하기 위하여 제품 뒤편에 UNIT 버튼을 원하는 단위가 나올 때까지 순차적으로 누른다. 주의.
GBF-1257B 카스블루투스체지방계앱사용매뉴얼 가. 사용 전 준비사항 (1) 기기 뒷면에 있는 밧데리 덮개를 연다. (2) 밧데리를 +/-부분을 올바르게 삽입한다. (3) 밧데리 덮개를 닫고 LCD 표시부가 0 점을 보여줄 때까지 기다린다. (4) 원하는 단위를 선택하기 위하여 제품 뒤편에 UNIT 버튼을 원하는 단위가 나올 때까지 순차적으로 누른다. 주의.
마지막 변경일 2018년 5월 7일 ** 이항분포와 정규분포의 관계 ** Geogebra와 수학의 시각화 책의 3.2소절 내용임. 가장 최근 파일은 링크를 누르면 받아 보실 수 있습니다.
 마지막 변경일 2018년 5월 7일 ** 이항분포와 정규분포의 관계 ** Geogebra와 수학의 시각화 책의 3.2소절 내용임. http://min7014.iptime.org/math/2017063002.htm 가장 최근 파일은 링크를 누르면 받아 보실 수 있습니다. https://goo.gl/edxsm7 http://min7014.iptime.org/math/2018010602.pdf
마지막 변경일 2018년 5월 7일 ** 이항분포와 정규분포의 관계 ** Geogebra와 수학의 시각화 책의 3.2소절 내용임. http://min7014.iptime.org/math/2017063002.htm 가장 최근 파일은 링크를 누르면 받아 보실 수 있습니다. https://goo.gl/edxsm7 http://min7014.iptime.org/math/2018010602.pdf
<4F B8A620C0CCBFEBC7D120C8B8B7CE20C0DBBCBAC0C720B1E2C3CA2E687770>
 Orcad 9.2 capture CIS(Component Information System) 을이용한회로도작성의기초 한국해양대학교지능로봇및자동화실험실 1. 시작 모든프로그램 Orcad Family Release 9.2 Capture CIS 를선택하여프로그램을실행시킨다. 2. New Project를선택하여프로젝트생성윈도우를띄우고나서, 오른쪽의그림예시와같이프로젝트명과디렉토리를설정해준다.
Orcad 9.2 capture CIS(Component Information System) 을이용한회로도작성의기초 한국해양대학교지능로봇및자동화실험실 1. 시작 모든프로그램 Orcad Family Release 9.2 Capture CIS 를선택하여프로그램을실행시킨다. 2. New Project를선택하여프로젝트생성윈도우를띄우고나서, 오른쪽의그림예시와같이프로젝트명과디렉토리를설정해준다.
1
 2/33 3/33 4/33 5/33 6/33 7/33 8/33 9/33 10/33 11/33 12/33 13/33 14/33 15/33 16/33 17/33 5) 입력을 다 했으면 확인 버튼을 클릭합니다. 6) 시작 페이지가 제대로 설정이 되었는지 살펴볼까요. 익스플로러를 종료하고 다시 실행시켜 보세요. 시작화면에 야후! 코리아 화면이 뜬다면 설정 완료..^^
2/33 3/33 4/33 5/33 6/33 7/33 8/33 9/33 10/33 11/33 12/33 13/33 14/33 15/33 16/33 17/33 5) 입력을 다 했으면 확인 버튼을 클릭합니다. 6) 시작 페이지가 제대로 설정이 되었는지 살펴볼까요. 익스플로러를 종료하고 다시 실행시켜 보세요. 시작화면에 야후! 코리아 화면이 뜬다면 설정 완료..^^
윈도 모바일 6.1을 OS로 사용하는 스마트폰(옴니아2 등)에서의 Tcl/Tk의 사용
에서의 Tcl/Tk의 사용") 일, 12/27/2009-18:11 bonkora 첨부 파일 1.png [1] 2.png [2] 3.png [3] 4.png [4] 5.png [5] 6.png [6] 7.png [7] 8.png [8] 9.png [9] 10.png [10] 11.png [11] study4etcl.zip [12] 파일 크기 11.91 KB 19.69 KB 21.67 KB
일, 12/27/2009-18:11 bonkora 첨부 파일 1.png [1] 2.png [2] 3.png [3] 4.png [4] 5.png [5] 6.png [6] 7.png [7] 8.png [8] 9.png [9] 10.png [10] 11.png [11] study4etcl.zip [12] 파일 크기 11.91 KB 19.69 KB 21.67 KB
Xcrypt 내장형 X211SCI 수신기 KBS World 채널 설정법
 [ X211S CI 위성방송수신기 - KBS World 채널 설정법 ] 세기위성 T: 82-2-2231-7989, F: 82-2-2232-6373 http://www.sekisat.com webmaster@sekisat.com 주의사항 구매 전에, 위의 X211S CI 수신기의 재고가 당사에 충분히 있는지, 미리 확인바랍니다. 본 제품은 Xcrypt
[ X211S CI 위성방송수신기 - KBS World 채널 설정법 ] 세기위성 T: 82-2-2231-7989, F: 82-2-2232-6373 http://www.sekisat.com webmaster@sekisat.com 주의사항 구매 전에, 위의 X211S CI 수신기의 재고가 당사에 충분히 있는지, 미리 확인바랍니다. 본 제품은 Xcrypt
 마지막 변경일 2018년 5월 7일 ** 도형의 자취 문제 ** Geogebra와 수학의 시각화 책의 4.1소절 내용임. http://min7014.iptime.org/math/2017063002.htm 가장 최근 파일은 링크를 누르면 받아 보실 수 있습니다. https://goo.gl/tywcbz http://min7014.iptime.org/math/2018010402.pdf
마지막 변경일 2018년 5월 7일 ** 도형의 자취 문제 ** Geogebra와 수학의 시각화 책의 4.1소절 내용임. http://min7014.iptime.org/math/2017063002.htm 가장 최근 파일은 링크를 누르면 받아 보실 수 있습니다. https://goo.gl/tywcbz http://min7014.iptime.org/math/2018010402.pdf
SBR-100S User Manual
 ( 1 / 24 ) SBR-100S 모델에대한 SSID( 네트워크이름 ) 변경하는방법을안내해드립니다. 아래안내사항은제품의초기설정값을기준으로작성되어있습니다. 1. SSID 이란? SSID 는 Service Set Identifier 의약자로무선랜을통해젂송되는모든패킷의헤더에존재하는고유식별자이다. 무선랜클라이언트가무선랜 AP 에접속할때각무선랜을다른무선랜과구붂하기위해사용됩니다.
( 1 / 24 ) SBR-100S 모델에대한 SSID( 네트워크이름 ) 변경하는방법을안내해드립니다. 아래안내사항은제품의초기설정값을기준으로작성되어있습니다. 1. SSID 이란? SSID 는 Service Set Identifier 의약자로무선랜을통해젂송되는모든패킷의헤더에존재하는고유식별자이다. 무선랜클라이언트가무선랜 AP 에접속할때각무선랜을다른무선랜과구붂하기위해사용됩니다.
슬라이드 1
 고객의 불편을 모바일과 웹을 통해 실시간으로 해결하는 모바일 영상 기반 A/S 시스템 매뉴얼 (AnySupport Video) Contents 1. 애니서포트 비디오 소개 2. 각 부분별 기능 소개 3. 프로그램 설치 4. 주요기능 설명 고객의 불편을 웹과 모바일을 통해 실시간으로 해결 1. 애니서포트 비디오 소개 fdfsfds 고객과 기업이 모두 만족하는
고객의 불편을 모바일과 웹을 통해 실시간으로 해결하는 모바일 영상 기반 A/S 시스템 매뉴얼 (AnySupport Video) Contents 1. 애니서포트 비디오 소개 2. 각 부분별 기능 소개 3. 프로그램 설치 4. 주요기능 설명 고객의 불편을 웹과 모바일을 통해 실시간으로 해결 1. 애니서포트 비디오 소개 fdfsfds 고객과 기업이 모두 만족하는
OnTuneV3_Manager_Install
 OnTuneV3.1 Manager 설치하기 # 사전준비사항 - Manager Version 3.1.6-2010-06-21 TeemStone 1. OnTune Manager를설치할 NT 서버 - Windows 2000, Windows 2003, Windows 2008, Windows XP, Windows Vista, Windows 7 등 Windows 2000이후모든
OnTuneV3.1 Manager 설치하기 # 사전준비사항 - Manager Version 3.1.6-2010-06-21 TeemStone 1. OnTune Manager를설치할 NT 서버 - Windows 2000, Windows 2003, Windows 2008, Windows XP, Windows Vista, Windows 7 등 Windows 2000이후모든
MF5900 Series MF Driver Installation Guide
 한국어 MF 드라이버설치설명서 사용자소프트웨어 CD-ROM................................................ 1.................................................................... 1..............................................................................
한국어 MF 드라이버설치설명서 사용자소프트웨어 CD-ROM................................................ 1.................................................................... 1..............................................................................
MACH3 Jog Pendant User Manual Draft Revision th of November 2015 By TECHDINE
 MACH3 Jog Pendant User Manual Draft Revision 0.12 25th of November 2015 By TECHDINE Table of Contents Introduction...3 1. Jog Pendant 의 연결 및 설정...4 2. Key 배치 / 설명...5 3. Jog Pendant 의 Key 확장...6 4. A축
MACH3 Jog Pendant User Manual Draft Revision 0.12 25th of November 2015 By TECHDINE Table of Contents Introduction...3 1. Jog Pendant 의 연결 및 설정...4 2. Key 배치 / 설명...5 3. Jog Pendant 의 Key 확장...6 4. A축
Microsoft Outlook G Suite 가이드
 UNICONVERSE Microsoft Outlook G Suite 가이드 G Suite 사용자가이드 - 국민대학교 유니컨버스 2017-01-01 2 Microsoft Outlook G Suite 가이드 내용 Microsoft Outlook 2016 에서 IMAP 설정... 3 Microsoft Outlook 2016 에서 POP 설정... 6 Google
UNICONVERSE Microsoft Outlook G Suite 가이드 G Suite 사용자가이드 - 국민대학교 유니컨버스 2017-01-01 2 Microsoft Outlook G Suite 가이드 내용 Microsoft Outlook 2016 에서 IMAP 설정... 3 Microsoft Outlook 2016 에서 POP 설정... 6 Google
제 2 장 기본 사용법
 LS Studio 1. 시작하기 1.1 특징 XG5000 에서는 XP-Builder, DriveView7 등의소프트웨어와의통합된개발환경을제공합니다. 통합된 개발환경에서는모든프로젝트파일을 XG5000 에서통합관리합니다. XP-Builder 통합프로젝트를사용함으로써 PLC 에서사용할변수목록을 CSV 파일로내보내기또는불러오기하는번거로움없이바로사용할수있습니다. 또한
LS Studio 1. 시작하기 1.1 특징 XG5000 에서는 XP-Builder, DriveView7 등의소프트웨어와의통합된개발환경을제공합니다. 통합된 개발환경에서는모든프로젝트파일을 XG5000 에서통합관리합니다. XP-Builder 통합프로젝트를사용함으로써 PLC 에서사용할변수목록을 CSV 파일로내보내기또는불러오기하는번거로움없이바로사용할수있습니다. 또한
슬라이드 1
 KloseupRemixer 가이드 기본인터페이스 배경 소품 캐릭터 캐릭터표정 소품부착 카메라 배경설정 대사 / 자막삽입, 편집 사운드 www.kloseup.com 009.06. 기본인터페이스 4 5. Scene library : 영상을구성하는데필요한장면 (Scene) 을모아두는부분입니다. 적용하기버튼을눌러선택한씬을타임라인에추가할수있습니다.. Object library
KloseupRemixer 가이드 기본인터페이스 배경 소품 캐릭터 캐릭터표정 소품부착 카메라 배경설정 대사 / 자막삽입, 편집 사운드 www.kloseup.com 009.06. 기본인터페이스 4 5. Scene library : 영상을구성하는데필요한장면 (Scene) 을모아두는부분입니다. 적용하기버튼을눌러선택한씬을타임라인에추가할수있습니다.. Object library
Contents 01. 안전을 위한 주의 사항 03 02. 터치형 멀티 조절기 각부 명칭 04 03. 터치형 각방 조절기 각부 명칭 05 04. 조절기 난방/정지 하기 06 05. 조절기 외출 /해제하기 07 06. 조절기 반복난방 하기 09 07. 조절기 예약난방 /
 사 용 설 명 서 대림산업 Touch형 조절기 멀티조절기 각방조절기 본 사용설명서는 찾기 쉬운 장소에 보관하세요. 제품 사용 전 반드시 사용설명서를 잘 읽어 주세요. 제품의 사양은 사전에 통보 없이 변경될 수 있습니다. 본사 및 공장 : 경기도 용인시 처인구모현면일산리 483-1 TEL : +82-31 - 336 9911 FAX : +82-31 - 336 9911
사 용 설 명 서 대림산업 Touch형 조절기 멀티조절기 각방조절기 본 사용설명서는 찾기 쉬운 장소에 보관하세요. 제품 사용 전 반드시 사용설명서를 잘 읽어 주세요. 제품의 사양은 사전에 통보 없이 변경될 수 있습니다. 본사 및 공장 : 경기도 용인시 처인구모현면일산리 483-1 TEL : +82-31 - 336 9911 FAX : +82-31 - 336 9911
MF Driver Installation Guide
 Korean MF 드라이버 설치설명서 사용자 소프트웨어 CD-ROM... 드라이버 및 소프트웨어 정보...1 지원되는 운영 체제...1 MF 드라이버 및 MF Toolbox 설치... [쉬운 설치]를 사용한 설치...2 [사용자 정의 설치]를 사용한 설치...10 USB 케이블 연결(USB를 이용해 연결하는 경우만)...20 설치 결과 확인...21 온라인
Korean MF 드라이버 설치설명서 사용자 소프트웨어 CD-ROM... 드라이버 및 소프트웨어 정보...1 지원되는 운영 체제...1 MF 드라이버 및 MF Toolbox 설치... [쉬운 설치]를 사용한 설치...2 [사용자 정의 설치]를 사용한 설치...10 USB 케이블 연결(USB를 이용해 연결하는 경우만)...20 설치 결과 확인...21 온라인
Microsoft PowerPoint - chap02-C프로그램시작하기.pptx
 #include int main(void) { int num; printf( Please enter an integer "); scanf("%d", &num); if ( num < 0 ) printf("is negative.\n"); printf("num = %d\n", num); return 0; } 1 학습목표 을 작성하면서 C 프로그램의
#include int main(void) { int num; printf( Please enter an integer "); scanf("%d", &num); if ( num < 0 ) printf("is negative.\n"); printf("num = %d\n", num); return 0; } 1 학습목표 을 작성하면서 C 프로그램의
var answer = confirm(" 확인이나취소를누르세요."); // 확인창은사용자의의사를묻는데사용합니다. if(answer == true){ document.write(" 확인을눌렀습니다."); else { document.write(" 취소를눌렀습니다.");
; // 확인창은사용자의의사를묻는데사용합니다. if(answer == true){ document.write( 확인을눌렀습니다.); else { document.write( 취소를눌렀습니다.);") 자바스크립트 (JavaScript) - HTML 은사용자에게인터페이스 (interface) 를제공하는언어 - 자바스크립트는서버로데이터를전송하지않고서할수있는데이터처리를수행한다. - 자바스크립트는 HTML 나 JSP 에서작성할수있고 ( 내부스크립트 ), 별도의파일로도작성이가능하다 ( 외 부스크립트 ). - 내부스크립트 - 외부스크립트
자바스크립트 (JavaScript) - HTML 은사용자에게인터페이스 (interface) 를제공하는언어 - 자바스크립트는서버로데이터를전송하지않고서할수있는데이터처리를수행한다. - 자바스크립트는 HTML 나 JSP 에서작성할수있고 ( 내부스크립트 ), 별도의파일로도작성이가능하다 ( 외 부스크립트 ). - 내부스크립트 - 외부스크립트
RS- 232, RS485 FND Display Module NET-SFND-4-23A RS-232, RS485 FND Display Module NET-SFND-4-23A MANUAL (Rev 1.0) Net-Control http
 Net-Control http") RS-232, RS485 FND Display Module NET-SFND-4-23A MANUAL (Rev 1.0) - 1 - 1. 정격사양. NET-SFND-4-23A Display Module 은 RS-232, RS-485 겸용입니다. 밝기조절기능을추가하여통신명령으로밝기를조절할수있습니다. 이기능을사용하여표시부를점멸시키거나점차밝아지거나어두워지는특수효과를낼수도있습니다.
RS-232, RS485 FND Display Module NET-SFND-4-23A MANUAL (Rev 1.0) - 1 - 1. 정격사양. NET-SFND-4-23A Display Module 은 RS-232, RS-485 겸용입니다. 밝기조절기능을추가하여통신명령으로밝기를조절할수있습니다. 이기능을사용하여표시부를점멸시키거나점차밝아지거나어두워지는특수효과를낼수도있습니다.
비트와바이트 비트와바이트 비트 (Bit) : 2진수값하나 (0 또는 1) 를저장할수있는최소메모리공간 1비트 2비트 3비트... n비트 2^1 = 2개 2^2 = 4개 2^3 = 8개... 2^n 개 1 바이트는 8 비트 2 2
 : 2진수값하나 (0 또는 1) 를저장할수있는최소메모리공간 1비트 2비트 3비트... n비트 2^1 = 2개 2^2 = 4개 2^3 = 8개... 2^n 개 1 바이트는 8 비트 2 2") 비트연산자 1 1 비트와바이트 비트와바이트 비트 (Bit) : 2진수값하나 (0 또는 1) 를저장할수있는최소메모리공간 1비트 2비트 3비트... n비트 2^1 = 2개 2^2 = 4개 2^3 = 8개... 2^n 개 1 바이트는 8 비트 2 2 진수법! 2, 10, 16, 8! 2 : 0~1 ( )! 10 : 0~9 ( )! 16 : 0~9, 9 a, b,
비트연산자 1 1 비트와바이트 비트와바이트 비트 (Bit) : 2진수값하나 (0 또는 1) 를저장할수있는최소메모리공간 1비트 2비트 3비트... n비트 2^1 = 2개 2^2 = 4개 2^3 = 8개... 2^n 개 1 바이트는 8 비트 2 2 진수법! 2, 10, 16, 8! 2 : 0~1 ( )! 10 : 0~9 ( )! 16 : 0~9, 9 a, b,
Microsoft PowerPoint - USB다운로더PC연결.pptx
 [ USB Driver 설치 및 SkyRobo 전송 방법 ] 작성일자 : 2013.01.31 - 목 차 - < USB Driver 설치 및 SkyRobo 전송 방법 > 1. USB Driver 설치 방법 2. PC에 USB 포트 연결하기 3. Port 설정 확인 방법 4. SkyRobo 프로그램 설치 / 실행하기 5. SkyRobo 프로그램 메뉴설명 6. SkyRobo
[ USB Driver 설치 및 SkyRobo 전송 방법 ] 작성일자 : 2013.01.31 - 목 차 - < USB Driver 설치 및 SkyRobo 전송 방법 > 1. USB Driver 설치 방법 2. PC에 USB 포트 연결하기 3. Port 설정 확인 방법 4. SkyRobo 프로그램 설치 / 실행하기 5. SkyRobo 프로그램 메뉴설명 6. SkyRobo
PowerPoint Template
 설치및실행방법 Jaewoo Shim Jun. 4. 2018 Contents SQL 인젝션이란 WebGoat 설치방법 실습 과제 2 SQL 인젝션이란 데이터베이스와연동된웹서버에입력값을전달시악의적동작을수행하는쿼리문을삽입하여공격을수행 SELECT * FROM users WHERE id= $_POST[ id ] AND pw= $_POST[ pw ] Internet
설치및실행방법 Jaewoo Shim Jun. 4. 2018 Contents SQL 인젝션이란 WebGoat 설치방법 실습 과제 2 SQL 인젝션이란 데이터베이스와연동된웹서버에입력값을전달시악의적동작을수행하는쿼리문을삽입하여공격을수행 SELECT * FROM users WHERE id= $_POST[ id ] AND pw= $_POST[ pw ] Internet
차례보기 Easy Setting Box 소개 03 Easy Setting Box 란 03 Easy Setting Box 주요기능 04 사용요구사항 Easy Setting Box 설치 / 제거하기 05 Easy Setting Box 설치하기 08 Easy Setting
 Easy Setting Box Easy Setting Box 사용자매뉴얼 Easy Setting Box 는모니터화면을여러개영역으로나누어창을사용하기쉽게배치할수있는화면분할응용프로그램입니다. 차례보기 Easy Setting Box 소개 03 Easy Setting Box 란 03 Easy Setting Box 주요기능 04 사용요구사항 Easy Setting Box
Easy Setting Box Easy Setting Box 사용자매뉴얼 Easy Setting Box 는모니터화면을여러개영역으로나누어창을사용하기쉽게배치할수있는화면분할응용프로그램입니다. 차례보기 Easy Setting Box 소개 03 Easy Setting Box 란 03 Easy Setting Box 주요기능 04 사용요구사항 Easy Setting Box
01장
 뇌를자극하는 Windows Server 2012 R2 부록 NAS4Free 의설치와환경설정 네트워크상에서저장공간이제공되는 NAS(Network Attached Storage) 환경을 VMware에서구성해야한다. 이책에서는그중 Unix 계열의운영체제이며무료로사용할수있는 NAS4Free 운영체제를설치하고사용할것이다. 결국지금설치하는 NAS4Free는쿼럼디스크와클러스터디스크를제공하는것이목적이다.
뇌를자극하는 Windows Server 2012 R2 부록 NAS4Free 의설치와환경설정 네트워크상에서저장공간이제공되는 NAS(Network Attached Storage) 환경을 VMware에서구성해야한다. 이책에서는그중 Unix 계열의운영체제이며무료로사용할수있는 NAS4Free 운영체제를설치하고사용할것이다. 결국지금설치하는 NAS4Free는쿼럼디스크와클러스터디스크를제공하는것이목적이다.
포인팅 장치 및 키보드
 포인팅 장치 및 키보드 문서 부품 번호: 430227-AD1 2007년 1월 본 설명서는 포인팅 장치 및 키보드에 대해 설명합니다. 목차 1 포인팅 장치 터치패드 ( 일부 모델만 해당 )................. 1 1 터치패드 사용.......................... 1 2 포인팅 스틱 ( 일부 모델만 해당 )............... 1
포인팅 장치 및 키보드 문서 부품 번호: 430227-AD1 2007년 1월 본 설명서는 포인팅 장치 및 키보드에 대해 설명합니다. 목차 1 포인팅 장치 터치패드 ( 일부 모델만 해당 )................. 1 1 터치패드 사용.......................... 1 2 포인팅 스틱 ( 일부 모델만 해당 )............... 1
목 차
 디지털운행기록계분석프로그램 사용자메뉴얼 루프 목 차 1. 단말기데이터다운로드 1-1 차량의설치된단말기의버튼중아래버튼은 1~2 초간누릅니다. 단말기의 버튼을 1 초 ~2 초간누릅니다 1-2 아래와같이변경된화면을확인후다운로드일수를설정 (1 일 ~31 일, 전체 ) 단말기의 버튼으로 다운로드일수를설정합니다. 1-3 USB 삽입후 OK 버튼을누르시면다운로드시작. 1.
디지털운행기록계분석프로그램 사용자메뉴얼 루프 목 차 1. 단말기데이터다운로드 1-1 차량의설치된단말기의버튼중아래버튼은 1~2 초간누릅니다. 단말기의 버튼을 1 초 ~2 초간누릅니다 1-2 아래와같이변경된화면을확인후다운로드일수를설정 (1 일 ~31 일, 전체 ) 단말기의 버튼으로 다운로드일수를설정합니다. 1-3 USB 삽입후 OK 버튼을누르시면다운로드시작. 1.
SIGIL 완벽입문
 누구나 만드는 전자책 SIGIL 을 이용해 전자책을 만들기 EPUB 전자책이 가지는 단점 EPUB이라는 포맷과 제일 많이 비교되는 포맷은 PDF라는 포맷 입니다. EPUB이 나오기 전까지 전 세계에서 가장 많이 사용되던 전자책 포맷이고, 아직도 많이 사 용되기 때문이기도 한며, 또한 PDF는 종이책 출력을 위해서도 사용되기 때문에 종이책 VS
누구나 만드는 전자책 SIGIL 을 이용해 전자책을 만들기 EPUB 전자책이 가지는 단점 EPUB이라는 포맷과 제일 많이 비교되는 포맷은 PDF라는 포맷 입니다. EPUB이 나오기 전까지 전 세계에서 가장 많이 사용되던 전자책 포맷이고, 아직도 많이 사 용되기 때문이기도 한며, 또한 PDF는 종이책 출력을 위해서도 사용되기 때문에 종이책 VS
SmartUpdaterPlus 설치 설치파일 다운로드 설치파일 다운로드하여 실행하여 순서에 따라 스마트 업데이트 플러스를 설치합니다. [스마트 업데이트 플러스 다운로드] 버튼을 클릭하여 설치파일 다운로드합니다. 소프트웨어 사용권에 동의하기를 누릅니다. 압축을 해제합니다
![SmartUpdaterPlus 설치 설치파일 다운로드 설치파일 다운로드하여 실행하여 순서에 따라 스마트 업데이트 플러스를 설치합니다. [스마트 업데이트 플러스 다운로드] 버튼을 클릭하여 설치파일 다운로드합니다. 소프트웨어 사용권에 동의하기를 누릅니다. 압축을 해제합니다](/thumbs/39/20101559.jpg "SmartUpdaterPlus 설치 설치파일 다운로드 설치파일 다운로드하여 실행하여 순서에 따라 스마트 업데이트 플러스를 설치합니다. [스마트 업데이트 플러스 다운로드] 버튼을 클릭하여 설치파일 다운로드합니다. 소프트웨어 사용권에 동의하기를 누릅니다. 압축을 해제합니다") SmartUpdaterPlus 스마트 업데이터 플러스 사용매뉴얼 SmartUpdaterPlus 설치 설치파일 다운로드 설치파일 다운로드하여 실행하여 순서에 따라 스마트 업데이트 플러스를 설치합니다. [스마트 업데이트 플러스 다운로드] 버튼을 클릭하여 설치파일 다운로드합니다. 소프트웨어 사용권에 동의하기를 누릅니다. 압축을 해제합니다. 4 설치 위치를 지정합니다.
SmartUpdaterPlus 스마트 업데이터 플러스 사용매뉴얼 SmartUpdaterPlus 설치 설치파일 다운로드 설치파일 다운로드하여 실행하여 순서에 따라 스마트 업데이트 플러스를 설치합니다. [스마트 업데이트 플러스 다운로드] 버튼을 클릭하여 설치파일 다운로드합니다. 소프트웨어 사용권에 동의하기를 누릅니다. 압축을 해제합니다. 4 설치 위치를 지정합니다.
Microsoft PowerPoint SDK설치.HelloAndroid(1.5h).pptx
.pptx") To be an Android Expert 문양세강원대학교 IT 대학컴퓨터학부 개발환경구조및설치순서 JDK 설치 Eclipse 설치 안드로이드 SDK 설치 ADT(Androd Development Tools) 설치 AVD(Android Virtual Device) 생성 Hello Android! 2 Eclipse (IDE) JDK Android SDK with
To be an Android Expert 문양세강원대학교 IT 대학컴퓨터학부 개발환경구조및설치순서 JDK 설치 Eclipse 설치 안드로이드 SDK 설치 ADT(Androd Development Tools) 설치 AVD(Android Virtual Device) 생성 Hello Android! 2 Eclipse (IDE) JDK Android SDK with
Microsoft PowerPoint - logo_2-미해답.ppt [호환 모드]
![Microsoft PowerPoint - logo_2-미해답.ppt [호환 모드]](/thumbs/79/79150257.jpg "Microsoft PowerPoint - logo_2-미해답.ppt [호환 모드]") Chap.2 Logo 프로그래밍기초 - 터틀그래픽명령어 ( 기본, 고급 ) 학습목표 터틀의이동과선그리기에대해살펴본다. 터틀의회전에대해살펴본다. 터틀펜과화면제어에대해살펴본다. 2012. 5. 박남제 namjepark@jejunu.ac.kr < 이동하기 > - 앞으로이동하기 forward 100 터틀이 100 픽셀만큼앞으로이동 2 < 이동하기 > forward(fd)
Chap.2 Logo 프로그래밍기초 - 터틀그래픽명령어 ( 기본, 고급 ) 학습목표 터틀의이동과선그리기에대해살펴본다. 터틀의회전에대해살펴본다. 터틀펜과화면제어에대해살펴본다. 2012. 5. 박남제 namjepark@jejunu.ac.kr < 이동하기 > - 앞으로이동하기 forward 100 터틀이 100 픽셀만큼앞으로이동 2 < 이동하기 > forward(fd)
실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
RealDSP UT 프로그램 메뉴얼
 Motorola Programmer ( 모델명 : MDProg16) 사용설명서 UUU 리얼시스 (RealSYS) Web: www.realsys.co.kr Tel: 031-420-4326 Fax: 031-420-4329-1 - 1. Motorola Programmer 프로그램특징 A. JTAG & OnCE 기능을이용한 Motorola 의내부플래시메모리 Writing
Motorola Programmer ( 모델명 : MDProg16) 사용설명서 UUU 리얼시스 (RealSYS) Web: www.realsys.co.kr Tel: 031-420-4326 Fax: 031-420-4329-1 - 1. Motorola Programmer 프로그램특징 A. JTAG & OnCE 기능을이용한 Motorola 의내부플래시메모리 Writing
PowerPoint 프레젠테이션
 유니티와아두이노를활용한 VR 컨트롤러개발 Part 06 헬로앱스코딩교육 김영준 공학박사, 목원대학교겸임교수前 Microsoft 수석연구원 splduino@gmail.com http://www.helloapps.co.kr 키보드로물체생성하기 키보드로물체생성하기 public GameObject CubeObject; public GameObject MyCamera;
유니티와아두이노를활용한 VR 컨트롤러개발 Part 06 헬로앱스코딩교육 김영준 공학박사, 목원대학교겸임교수前 Microsoft 수석연구원 splduino@gmail.com http://www.helloapps.co.kr 키보드로물체생성하기 키보드로물체생성하기 public GameObject CubeObject; public GameObject MyCamera;
아래 항목은 최신( ) 이미지를 모두 제대로 설치하였을 때를 가정한다
 이미지를 모두 제대로 설치하였을 때를 가정한다") 공유기사용환경에서 MNC-V100 환경설정하기 다음설명은 AnyGate GW-400A (Http://www.anygate.co.kr) 를사용하는네트워크환경에서 MNC-V100 을연결하여사용하는법을설명합니다. 공유기내부네트워크환경설정공유기를사용하는환경에서공유기의설정을아래그림과같이설정하시면 MNC-V100의설정을변경하지않아도모비캠과연결할수있습니다. ( 공유기의환경을변경하기어려운경우에는
공유기사용환경에서 MNC-V100 환경설정하기 다음설명은 AnyGate GW-400A (Http://www.anygate.co.kr) 를사용하는네트워크환경에서 MNC-V100 을연결하여사용하는법을설명합니다. 공유기내부네트워크환경설정공유기를사용하는환경에서공유기의설정을아래그림과같이설정하시면 MNC-V100의설정을변경하지않아도모비캠과연결할수있습니다. ( 공유기의환경을변경하기어려운경우에는