태에서미리정한시간에따라파지력을변화시킬때, 상기미리정한시간에따라검출되는제 2 생체신호에대한특징벡터인제 2 시너지벡터와, 상기제 2 생체신호를상기제 2 생체신호에대응되는파지력정보로변환시킬수있는변환행렬을상기분류자세별로저장하여포함하고있는자세정보저장부와, 상기제 1 시너지벡터와
|
|
|
- 서현 윤
- 6 years ago
- Views:
Transcription
1 (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) B25J 9/16 ( ) B25J 13/08 ( ) (21) 출원번호 (22) 출원일자 2014 년 12 월 19 일 심사청구일자 전체청구항수 : 총 7 항 2014 년 12 월 19 일 (54) 발명의명칭파지자세및파지력을추정하는장치 (11) 공개번호 (43) 공개일자 2016년06월29일 (71) 출원인 서울대학교산학협력단 서울특별시관악구관악로 1 ( 신림동 ) 재단법인실감교류인체감응솔루션연구단 서울특별시성북구화랑로 14 길 5, 국제협력관 ( 하월곡동, 한국과학기술연구원 ) (72) 발명자 김상현 서울특별시동작구동작대로 29 길 118, 501 동 202 호 ( 사당동, 신동아아파트 ) 박재흥 경기도용인시수지구진산로 34 번길 29, 712 동 901 호 ( 풍덕천동, 진산마을삼성래미안 7 차아파트 ) ( 뒷면에계속 ) (74) 대리인 리앤목특허법인 (57) 요약 본발명은파지자세및파지력을추정하는장치에관한것으로서, 미리정한신체부위에부착되어상기제 1 생체신호를검출할수있는전극센서와, 상기검출된제 1 생체신호에대한특징벡터인제 1 시너지벡터를추출하는시너지추출부와, 미리정한수로분류된복수개의분류자세중적어도하나의자세를사용자가취한상 ( 뒷면에계속 ) 대표도 - 도 1-1 -
2 태에서미리정한시간에따라파지력을변화시킬때, 상기미리정한시간에따라검출되는제 2 생체신호에대한특징벡터인제 2 시너지벡터와, 상기제 2 생체신호를상기제 2 생체신호에대응되는파지력정보로변환시킬수있는변환행렬을상기분류자세별로저장하여포함하고있는자세정보저장부와, 상기제 1 시너지벡터와상기제 2 시너지벡터사이의유사도를평가하여, 상기임의의파지자세를상기분류자세들중적어도하나의특정분류자세로추정하는파지자세추정부와, 상기변환행렬을이용하여상기검출된제 1 생체신호로부터상기임의의파지자세에서의파지력을추정하는파지력추정부를포함하는것을특징으로한다. 본발명에따르면, 사용자가임의의파지자세를취할때발생하는제 1 생체신호로부터상기임의의파지자세및 파지력을동시에연관시켜추정할수있게된다. (72) 발명자 김민곤 경기도군포시용호 2 로 51, 102 동 1101 호 ( 당동, 쌍용아파트 ) 이지민 서울특별시관악구남부순환로 1910, 402 호 ( 봉천동 ) 권정흠 서울특별시강서구강서로 348, 110 동 501 호 ( 내발산동, 우장산힐스테이트아파트 ) 유범재 서울특별시서초구서초중앙로 188, B 동 2003 호 ( 서초동, 아크로비스타 ) 이발명을지원한국가연구개발사업 과제고유번호 부처명 교육과학기술부 연구관리전문기관 한국연구재단 연구사업명 글로벌프론티어연구개발사업 연구과제명 인간의손과원격물체의상호작용을위한원격존재실시간 Robot Hand의조작제어 기여율 1/1 주관기관 서울대학교 연구기간 ~
3 명세서청구범위청구항 1 사용자가임의의파지자세를취할때발생하는제1 생체신호로부터파지자세및파지력을추정하는장치에있어서, 미리정한신체부위에부착되어상기제1 생체신호를검출할수있는전극센서 ; 상기검출된제1 생체신호에대한특징벡터인제1 시너지벡터를추출하는시너지추출부 ; 미리정한수로분류된복수개의분류자세중적어도하나의자세를사용자가취한상태에서미리정한시간에따라파지력을변화시킬때, 상기미리정한시간에따라검출되는제2 생체신호에대한특징벡터인제2 시너지벡터와, 상기제2 생체신호를상기제2 생체신호에대응되는파지력정보로변환시킬수있는변환행렬을상기분류자세별로저장하여포함하고있는자세정보저장부 ; 상기제1 시너지벡터와상기제2 시너지벡터사이의유사도를평가하여, 상기임의의파지자세를상기분류자세들중적어도하나의특정분류자세로추정하는파지자세추정부 ; 상기변환행렬을이용하여상기검출된제1 생체신호로부터상기임의의파지자세에서의파지력을추정하는파지력추정부 ; 를포함하는것을특징으로하는파지자세및파지력을추정하는장치. 청구항 2 제 1항에있어서, 상기제1 생체신호와제2 생체신호는근전도신호이며, 상기전극센서는상기근전도신호를검출할수있는근전도센서인것을특징으로하는파지자세및파지력을추정하는장치. 청구항 3 제 1항에있어서, 상기미리정한신체부위는, 사용자의손가락과손목의움직임을관장하는근육들이위치한부위들중적어도하나를포함하는것을특징으로하는파지자세및파지력을추정하는장치. 청구항 4 제 1항에있어서, 상기제1 시너지벡터와제2 시너지벡터는, 검출되는생체신호에대해서소위주성분분석법을통해생성된고유벡터를이용하여추출되는것을특징으로하는파지자세및파지력을추정하는장치. 청구항 5 제 1항에있어서, 상기제2 생체신호에대응되는파지력정보는, 상기미리정한시간에따라파지력을변화시킬때검출되는힘정보로서, 힘측정센서를이용하여검출되는것을특징으로하는파지자세및파지력을추정하는장치. 청구항 6-3 -
4 제 1항에있어서, 상기파지자세추정부는, 상기제1 생체신호시너지벡터와상기제2 생체신호시너지벡터들사이의소위가중된유클리드거리차이를기초로하여상기유사도를평가함으로써, 상기상기임의의파지자세를상기분류자세들중에서상기거리차이가최소인적어도하나의상기특정분류자세로추정하는것을특징으로하는파지자세및파지력을추정하는장치. 청구항 7 제 1항에있어서, 상기파지력추정부는, 상기파지자세추정부에의하여추정된상기특정분류자세에대응하는상기변환행렬을이용하여, 상기제1 생체신호가입력되면상기임의의파지자세에서의파지력으로추정할수있는파지력정보가출력되도록하는것을특징으로하는파지자세및파지력을추정하는장치. 발명의설명 [0001] 기술분야본발명은파지자세및파지력을추정하는장치에대한것으로서, 사용자가임의의파지자세를취할때발생하는제1 생체신호로부터상기임의의파지자세및파지력을동시에연관시켜추정할수있도록하는파지자세및파지력을추정하는장치에관한것이다. [0002] [0003] [0004] [0005] 배경기술현대사회에들어서로봇기술의발전으로인간사회에다양한영향을미치면서, 로봇과인간사이의인터페이스구축에대한연구가활발히이루어지고있다. 이러한연구의일환으로많이대두되는것이생체신호를이용한인터페이스구성이다. 생체신호는사용자의정보가나타나있기에, 사용자가임의의장비를조작할필요없이로봇을조작할수있다는이점이있다. 이러한생체신호중인간의골격근에서발현되는신호를근전도라고명명하며, 다양한분야에서인터페이스를구축하거나, 근육의움직임을분석하기위하여사용되고있다. 종래에는, 상기인터페이스구축과관련해서근전도를이용하여자세를추정하는연구와, 근전도를이용하여힘을추정하려는연구가개별적으로있었다. 하지만종래의근전도를이용하는기술은, 자세와힘을추정함에있어, 동시에연관하여나타낼수가없다는문제점이있었다. 발명의내용 [0006] 해결하려는과제본발명은상기문제를해결하기위해안출된것으로서, 그목적은사용자가임의의파지자세를취할때발생하는제1 생체신호로부터상기임의의파지자세및파지력을동시에연관시켜추정할수있도록하는파지자세및파지력을추정하는장치를제공하기위함이다. [0007] 과제의해결수단상기목적을달성하기위하여본발명에따른파지자세및파지력을추정하는장치는, 미리정한신체부위에부착되어상기제1 생체신호를검출할수있는전극센서와, 상기검출된제1 생체신호에대한특징벡터인제 1 시너지벡터를추출하는시너지추출부와, 미리정한수로분류된복수개의분류자세중적어도하나의자세를사용자가취한상태에서미리정한시간에따라파지력을변화시킬때, 상기미리정한시간에따라검출되는제2 생체신호에대한특징벡터인제2 시너지벡터와, 상기제2 생체신호를상기제2 생체신호에대응되는파지력정보로변환시킬수있는변환행렬을상기분류자세별로저장하여포함하고있는자세정보저장 - 4 -
5 부와, 상기제1 시너지벡터와상기제2 시너지벡터사이의유사도를평가하여, 상기임의의파지자세를상기분류자세들중적어도하나의특정분류자세로추정하는파지자세추정부와, 상기변환행렬을이용하여상기검출된제1 생체신호로부터상기임의의파지자세에서의파지력을추정하는파지력추정부를포함하는것을특징으로한다. [0008] [0009] [0010] [0011] [0012] [0013] 여기서, 상기파지자세및파지력을추정하는장치는, 상기제1 생체신호와제2 생체신호가근전도신호이며, 상기전극센서가상기근전도신호를검출할수있는근전도센서인것이바람직하다. 여기서, 상기파지자세및파지력을추정하는장치는, 상기미리정한신체부위가사용자의손가락과손목의움직임을관장하는근육들이위치한부위들중적어도하나를포함하는것일수도있다. 여기서, 상기파지자세및파지력을추정하는장치는, 상기제1 시너지벡터와제2 시너지벡터가, 상기검출되는생체신호에대해서소위주성분분석법을통해생성된고유벡터를이용하여추출되는것이바람직하다. 여기서, 상기파지자세및파지력을추정하는장치는, 상기제2 생체신호에대응되는파지력정보가, 미리정한시간에따라파지력을변화시킬때검출되는힘정보로서, 힘측정센서를이용하여검출되는것이바람직하다. 여기서, 상기파지자세및파지력을추정하는장치는, 상기파지자세추정부가, 상기제1 생체신호시너지벡터와상기제2 생체신호시너지벡터들사이의소위가중된유클리드거리차이를기초로하여상기유사도를평가함으로써, 상기임의의파지자세를상기분류자세들중에서상기거리차이가최소인적어도하나의상기특정분류자세로추정하는것이바람직하다. 여기서, 상기파지자세및파지력을추정하는장치는, 상기파지력추정부가, 상기파지자세추정부에의하여추정된상기특정분류자세에대응하는상기변환행렬을이용하여, 상기제1 생체신호가입력되면상기임의의파지자세에서의파지력으로추정할수있는파지력정보가출력되도록하는것이바람직하다. [0014] 발명의효과 본발명의파지자세및파지력을추정하는장치에따르면, 사용자가임의의파지자세를취할때발생하는제 1 생체신호로부터상기임의의파지자세및파지력을동시에연관시켜추정할수있는효과가있다. [0015] 도면의간단한설명 도 1 은본발명의일실시예에따른파지자세및파지력을추정하는장치의블록도 ; 도 2는도 1에도시된자세정보저장부의블록도, 도 3은도 2에도시된자세정보들의전처리과정을나타낸흐름도, 도 4는도 1에도시된파지력추정부에서수행되는파지력추정방법을나타낸흐름도 ; 도 5는도 1에도시된전극센서가부착되는신체부위를나타낸도면 ; 도 6은미리정한수로분류된분류자세를나타낸도면 ; 도 7은생체신호를이용한파지력추정결과와시너지벡터를이용한파지력추정결과를나타낸그래프, 및도 8은시너지벡터를이용한파지력추정결과와실제측정된파지력결과사이의절대오차를나타낸그래프이다. [0016] [0017] 발명을실시하기위한구체적인내용이하에서는도면을참조하여본발명을보다상세하게설명한다. 도면들중동일한구성요소들은가능한한어느곳에서든지동일한부호들로나타내고있음에유의해야한다. 또한본발명의요지를불필요하게흐릴수있는공지기능및구성에대한상세한설명은생략한다. 본발명에서사용한용어는단지특정한실시예를설명하기위해사용된것으로본발명을한정하려는의도가아니다. 단수의표현은문맥상명백하게다르게뜻하지않는한, 복수의표현을포함한다. 본출원에서, " 포함하다 " 또는 " 가지다 " 등의용어는명세서상에기재된특징, 숫자, 단계, 동작, 구성요소, 부품또는이들을조합한것이존재함을지정하려는것이지, 하나또는그이상의다른특징들이나숫자, 단계, 동작, 구성요소, 부품또는이들을조합한것들의존재또는부가가능성을미리배제하지않는것으로이해되어야한다
6 [0018] [0019] 도 1은본발명의일실시예에따른파지자세및파지력을추정하는장치의블록도이고, 도 2는도 1에도시된자세정보저장부의블록도이며, 도 3은도 2에도시된자세정보들의전처리과정을나타낸흐름도이며, 도 4는도 1에도시된파지력추정부에서수행되는파지력추정방법을나타낸흐름도이다. 도 1 내지도 4를참조하면, 발명의일실시예에따른파지자세및파지력을추정하는장치 (100) 는, 사용자가임의의파지자세 (P) 를취할때발생하는제1 생체신호 (V 1 ) 로부터파지자세및파지력을추정하는장치로서, 전 극센서 (10) 와, 시너지추출부 (20) 와, 자세정보저장부 (30) 와, 파지자세추정부 (40) 와, 파지력추정부 (50) 를포 함하여구성된다. [0020] 본실시예에서상기제 1 생체신호 (V 1 ) 는사용자가임의의파지자세를취할때검출되는생체신호이며, 제 2 생체신호 (V 2 )( 후술 ) 는전처리단계과정 ( 후술 ) 에서검출되는생체신호임을전제로한다. 여기서상기제 1 생체 신호 (V 1 ) 및제 2 생체신호 (V 2 )( 후술 ) 는, 골격근에서발현되는신호 ( 이하근전도신호 (v i )) 로구성된근전도집 합 (V) 임을전제로한다. [0021] [0022] [0023] 상기전극센서 (10) 는, 상기생체신호를검출할수있는센서로서, 사용자의근전도신호를수집할수있는수단을포함할수있다. 여기서상기전극센서 (10) 는, 사용자의미리정한신체부위에탈부착될수있는근전도센서 (EMG, electromyography) 이다. 본실시예에서상기전극센서 (10) 는, Delsys Tringo EMG System이사용되었다. 여기서상기전극센서 (10) 의샘플링주파수가 1/n Hz이고 1초동안근전도신호를수집한다면 n 개 (frame) 의근전도신호 (v i ) 로이루어진근전도집합 (V = [v 1, v 2,..,v i,.., v n ],i=1,2,...,n ) 을검출할수있다. 여기서상기미리정한신체부위는, 사용자의손가락과손목의움직임을관장하는근육들이위치한부위들중적어도하나를포함할수있다. 예를들어, 상기미리정한신체부위의수가 m 이라면상기전극센서 (10) 는 m 개가마련되며, 상기근전도신호 (v i ) 는 m 개의요소를가진열벡터 (column vector) 로표현될수있다. 또한상 기근전도집합 (V) 는크기가 m x n 인행렬집합으로표현될수있다. ( ) [0024] 본실시예에서상기전극센서 (10) 가부착되는위치는, 도 5에도시된바와같이, Extensor Carpi Ulnaris(ECU)(10a), Extensor Digitorum Communis(EDC)(10b), Extensor Carpi Radialis(ECR)(10c), Flexor Carpi Ulnaris(FCU)(10d), Flexor Digitorum Superficialis(FDS)(10e), Flexor Carpi Radialis(FCR)(10f) 의 6 가지근육들이위치하는부분이다. 따라서본실시예에서, 상기 m 은 6 이라고할수있다. [0025] 상기시너지추출부 (20) 는, 상기 6 개의근육들 (10a, 10b, 10c, 10d, 10e, 10f) 에서검출되는근전도신호집합 (V) 인제 1 생체신호 (V 1 ) 로부터, 상기근전도신호 (v i ) 들사이의강한상관관계를수학적으로찾아특징벡터로 나타내는제 1 시너지벡터 (b k ) 들을추출한다. 상기제 1 시너지벡터 (b k ) 들은, 검출되는상기근전도신호 (v i ) 들 에대해서소위주성분분석법 (PCA, Principle Component Analysis) 의결과를이용하여추출된다. [0026] 여기서상기제 1 시너지벡터 (b k ) 들은, 상기주성분분석법을이용한 [ 수학식 1] 에의해생성되는공분산행렬 (Cov : covariance matrix) 에대한고유분석 (Eigen Value Decomposition) 을통해구할수있다. [0027] [ 수학식 1] [0028] [0029] 여기서, n 은고정된파지자세에서수집된근전도신호 (v i ) 의수를의미하며, i 는수집된상기 n 개의근전도신 호 (v i ) 들중 i 번째 frame 의근전도신호 (v i ) 를의미하며, 은파지자세에서측정된 n 개의근전도신호 (v i ) 들의평균벡터이다. 마지막으로 [ 수학식 1] 에서 T 는전치 (transpose) 를나타낸다
7 [0030] [0031] [0032] 상기공분산행렬 (Cov) 의고유분석을통하면고유값및상기고유값에대응되는고유벡터 ( 이하주성분벡터 ) 가생성되며, 일반적으로고유값의크기순서에따라상위 K개의주성분벡터들을선택할수있으며, 선택된상위 K개의주성분벡터들을열백터로하는시너지벡터들을얻을수있다. 한편, 상기근전도집합 (V) 를상기주성분분석법을이용하여행렬분해하면 [ 수학식 2] 와같다. [ 수학식 2] [0033] [0034] 여기서 V 는상기미리정한 m 개의신체부위들에서수집되는 n 개의 frame 근전도신호 (v i ) 들의근전도신호 집합 ( ) 이다. 여기서 A 는상기근전도신호집합 (V) 으로부터상기주성분분석법을통해생성되는주 성분벡터들의집합 ( ) 이다. 여기서 C 는상기주성분벡터들에상응하는계수벡터들의집합 ( ) 이다. [0035] 일반적으로상기 m 개의신체부위들에서검출되는근전도신호 (v i ) 의 m 개요소들사이에는강한상관관계가존 재하므로, 상기시너지벡터들의개수 (K) 를상기마련되는전극센서 (10) 들의개수 (m) 보다작게하여도상기시 너지벡터들만으로상기고정된파지자세에서발현되는근전도경향을잘반영할수있다. 여기서상기시너지 벡터들의집합 (A') 을, m x K 크기의행렬 ( ) 로, 상기시너지벡터들의집합 (A') 에상응하는계 수벡터들의집합 (C') 을, K x n 크기의행렬 ( ) 로표현할수있다. [0036] 본실시예에서상기제 1 시너지벡터 (b k ) 들은, 상기주성분벡터에대응하는고유값들중상위 3 개 (K=3) 의고유 값에대응되는주성분벡터들 (b 1, b 2, b 3 ) 을선택하여추출되었다. [0037] 상기자세정보저장부 (30) 는, 전처리과정을통하여미리정한수로분류된복수개의분류자세 (P j ) 별로제 2 시너지벡터 (a j,k ) 들과변환행렬 (H j ) 를저장하여포함한다. [0038] 여기서상기분류자세는, 사용자가손으로물건을잡을때취하는자세를말한다. 본실시예에서상기분류자 세 (P j ) 를, 도 6 에도시된바와같이, 엄지, 검지를이용하여파지하는자세 (Thumb-Index Grip, P 1 ) 와, 엄지, 검 지, 중지를이용하여파지하는자세 (Thumb-2 Grip, P 2 ) 와, 엄지, 검지, 중지, 약지를이용하여파지하는자세 (Thumb-3 Grip, P 3 ) 로분류하였다. [0039] [0040] 상기전처리과정의일례는, 도 3 을참고하여설명하기로한다. 먼저, 상기 6 가지근육 (10a, 10b, 10c, 10d, 10e, 10f) 이위치하는사용자의신체부위에상기전극센서 (10) 들을부착하고, 힘측정센서를포함하는물체 (S) 를마련한후, 상기분류자세 (P j ) 들중적어도하나의자세를 사용자가취하여상기물체 (S) 를파지한상태에서미리정한시간에따라파지력 (f j ) 을변화시킨다. 상기힘측정 센서는 ATI-MINI40 가이용되었다. 상기사용자는, 단조증가방식으로파지력이 15N 까지변화할수있도록상기 힘측정센서에힘을가하였다. (S31) [0041] 이어서, 상기사용자가파지력을변화시킬때상기전극센서 (10) 를이용하여근전도신호집합 (V) 인제 2 생 체신호 (V 2,j ) 를검출하는동시에, 상기힘측정센서를이용하여상기제 2 생체신호 (V 2,j ) 에대응하는상기파지 력 (f j ) 정보를검출한다. 여기서, n 개의 frame 으로근전도신호를수집하였다면, 상기제 2 생체신호 (V 2,j ) 는 m x n 크기의행렬이며, 상기파지력 (f j ) 는 1 x n 크기의행렬이된다.(S32) [0042] 이렇게 S32 단계에서검출된제 2 생체신호 (V 2,j ) 를, 상기주성분분석법을이용한 [ 수학식 1] 에의해생성되는 공분산행렬 (Cov : covariance matrix) 에대한고유분석 (Eigen Value Decomposition) 을통해상기제 2 시너지 벡터 (a j,k ) 들을추출한다. 본실시예에서는, 상기제 2 시너지벡터 (a j,k ) 들의개수를상기제 1 시너지벡터 (b k ) 들 - 7 -
8 과마찬가지로 3 개 (K=3) 로추출하였다. (S33) [0043] 아울러, S32 단계에서검출된상기제 2 생체신호 (V 2,j ) 와, 상기제 2 생체신호 (V 2,j ) 에대응하는상기파지력정 보 (f j ) 사이의변환행렬 (H j ) 을추출한다. 여기서상기변환행렬 (H j ) 은, [ 수학식 4] 에의해얻어질수있다. (S34) [0044] [0045] 먼저 [ 수학식 4] 의도출과정을 [ 수학식 3] 으로부터설명한다. [ 수학식 3] [0046] [0047] 여기서, f i 는상기 i 번째 frame 에상응하는파지력 ( ) 이며, 상기 v i 는상기 i 번째 frame 에상 응하는근전도신호 ( ) 이다. 고정된파지자세에서검출되는상기 i번째 frame에상응하는근전도신호 (v i ) 와, 상기 i번째 frame에상응하는파지력 (f i ) 사이에선형성이가정된다. 상기 H는상기고정된파지자세에서의상기 i번째 frame에상응하는근전도신호 (v i ) 와, 상기 i번째 frame에상응하는파지력 (f i ) 사이의선형변환행렬 ( ) 이다. [0048] 고정된상기분류자세 (P j ) 에서수집되는 n 개의근전도신호 (v i ) 와, n 개의파지력 (f i ) 사이의변환행렬 (H j ) 은 [ 수학식 4] 와같다. [0049] [ 수학식 4] [0050] [0051] 여기서 V 2,j 는상기 n 개의근전도신호 (v i ) 들의근전도신호집합을나타내는제 2 생체신호 ( ) 이 며, f j 는상기제 2 생체신호 (V 2,j ) 에대응하는파지력정보 ( ) 이다. 상기 H j 는고정된상기분류 자세 (P j ) 에서의상기제 2 생체신호 (V 2,j ) 와상기제 2 생체신호 (V 2,j ) 에대응하는파지력정보 (f j ) 사이의선형 변환행렬 ( ) 이다. [ 수학식 3] 에서보는바와같이, 상기 i번째 frame에상응하는근전도신호 (v i) 와상기 i번째 frame에상응하는파지력 (f i ) 사이에선형성이가정되는것과마찬가지로, 상기제2 생체신호 (V 2,j ) 와상기제2 생체신호 (V 2,j ) 에대응하는파지력정보 (f j ) 사이에도선형성이가정된다. 여기서상기 [ 수학식 4] 에서의 + 는의사역행렬 (pseudo inverse) 를의미한다. (S34) [0052] 이어서, 상기 S31, S32, S33, S34 단계를상기분류자세 (P j ) 들전부 (P 1, P 2, P 3 ) 에대하여수행한다. (S35) [0053] 한편상기파지자세추정부 (40) 는, 상기제 1 시너지벡터 (b k ) 와, 상기제 2 시너지벡터 (a j,k ) 들사이의유사도를 상기분류자세별로평가함으로써, 상기임의의파지자세 (P R ) 를상기분류자세 (P j ) 들중적어도하나의특정분 류자세 (P c ) 로추정한다. 본실시예에서 P c 는 P 1, P 2, P 3 중에서어느하나일수있다. [0054] 본실시예에서상기파지자세추정부 (40) 는, 상기제 1 시너지벡터 (b k ) 와, 상기제 2 시너지벡터 (a j,k ) 들사이의 가중유클리드거리차이 (weighted-euclidean distance) 를기초로만들어진평가함수 (E(j)) 를통해상기유사 도를평가한다. [0055] 상기평가함수 (E(j)) 는 [ 수학식 5] 으로표현되며, 상기평가함수 (E(j)) 의값은 0 에가까울수록상기임의의 파지자세 (P R ) 가추정되는상기특정분류자세 (P c ) 와유사함을의미한다
![[0056] [ 수학식 5] [0057] [0058] 여기서 K 는, 상기시너지추출부 (20) 에서추출되는시너지벡터 (b k, a j,k ) 들의개수이며, 본실시예에서 K 의값은 3 이다.](/docs-images/91/105445530/images/9-0.jpg "여기서 j 는상기분류자세들중 j 번째자세를의미하며, w k 는상기제 1 시너지벡터 (b k ) 를구하기위하 여만든 [ 수학식 1] 의공분산행렬 (Cov) 를고유분석하였을때생성되는고유값행렬 (W) 의 k 번째대각성분의 값을의미한다.")
9 [0056] [ 수학식 5] [0057] [0058] 여기서 K 는, 상기시너지추출부 (20) 에서추출되는시너지벡터 (b k, a j,k ) 들의개수이며, 본실시예에서 K 의값은 3 이다. 여기서 j 는상기분류자세들중 j 번째자세를의미하며, w k 는상기제 1 시너지벡터 (b k ) 를구하기위하 여만든 [ 수학식 1] 의공분산행렬 (Cov) 를고유분석하였을때생성되는고유값행렬 (W) 의 k 번째대각성분의 값을의미한다. [0059] 여기서상기파지자세추정부 (40) 는, 상기분류자세 (P j ) 들중상기평가함수 (E(j)) 의값이최소가되도록하 는특정분류자세 (P c ) 를추출함으로써, 상기임의의파지자세 (P R ) 를상기특정분류자세 (P c ) 로추정하게 된다. [0060] 본실시예에서, 임의의파지자세 (P R ) 로서상기분류자세 (P k ) 들중상기 P 1, P 2, P 3 자세를각각 300 회씩인가하 여실제인가되는임의의파지자세 (P R ) 에대한추정되는특정분류자세 (P c ) 의결과를혼동행렬로서 [ 표 1] 에 나타내었다. 표 1 [0061] 인가파지자세 (P 1 ) 인가파지자세 (P 2 ) 인가파지자세 (P 3 ) 추정특정분류자세 (P 1 ) 추정특정분류자세 (P 2 ) 추정특정분류자세 (P 3 ) [0062] 상기 [ 표 1] 에나타난바와같이, 실제인가되는임의의파지자세 (P R ) 가 P 2 일때 300 회중 10 회를제외하고, 실 제인가되는임의의파지자세 (P) 와추정되는특정분류자세 (P c ) 가모두일치하였다. 즉추정성공률은 98.89% 을보였다. [0063] 상기파지력추정부 (50) 는, 상기특정분류자세 (P c ) 에대응하는변환행렬 (H c ) 을이용하여상기전극센서 (10) 를통해검출된상기제 1 생체신호 (V 1 ) 로부터상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는 파지력정보 (f c ) 를출력한다. 추정예를들어, 상기특정분류자세 (P c ) 가 P 1 이라면이용되는상기변환행렬 (H c ) 은 H 1 이된다. [0064] [0065] 상기파지력추정부 (50) 에서수행되는파지력추정과정의일례를도 4 를이용하여설명하기로한다. 먼저, 시너지추출부 (20) 로부터추출된상기제 1 생체신호 (V 1 ) 의주성분벡터들의집합 (A) 을이용하여상기제 1 생체신호 (V 1 ) 를상기변환행렬 (H c ) 에이용될수있도록 [ 수학식 6] 와같이재구성한다.(S51) [0066] [ 수학식 6] [0067] [0068] 여기서 A 는상기주성분분석법을통해상기제 1 생체신호 (V 1, ) ) 으로부터생성되는주성분 벡터들의집합 ( ) 을의미한다. 여기서 C 는상기제 1 생체신호 (V 1 ) 으로부터생성되는주성분벡 터들에상응하는계수벡터들의집합 ( ) 이다. 여기서상기 V' 는상기제 1 생체신호 (V 1 ) 를상기 변환행렬 (H c ) 에이용될수있도록상기 A 와 C 의행렬곱에의해생성되는재구성되는제 1 재구성생체신호 - 9 -
10 (V', ) 이다. [0069] 아울러, 상기변환행렬 (H c ) 을이용하여상기제 1 생체신호 (V 1 ) 로부터생성되는주성분벡터들의집합 (A) 과, 상 기제 1 생체신호 (V 1 ) 로부터상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 (f c ) 를 출력한다. (S52) [0070] 상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 (f c ) 를출력하는방법은 [ 수학식 7] 과 [ 수학식 8] 을이용하여설명한다. [0071] [ 수학식 7] [0072] [0073] [0074] 여기서 C 와 A 와 V' 가의미하는바는상기 [ 수학식 6] 에서의 C 와 A 와 V' 의의미와동일하다. 여기서 C 는상기 A 의주성분벡터들이서로직교 (orthonormal) 하는점을이용하여상기 [ 수학식 7] 처럼구할수있다. [ 수학식 8] [0075] [0076] 여기서 f c 는임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 ( ) 로서상기 [ 수학식 3] 의 f i 에대응되고, V' 는제 1 재구성생체신호 ( ) 로서상기 [ 수학식 3] 의 v i 에대응되 며, H c 는상기추정되는특정분류자세 (P c ) 에대응하는선형변환행렬 ( ) 로서, 상기 [ 수학 식 3] 의 H 에대응된다. 즉, 상기 [ 수학식 3] 의 f i, v i, H 는각각 f c, V', H c 로치환될수있다. 그리고상기 V' 는 [ 수학식 6] 에서와같이로표현되며, 상기 C 는 [ 수학식 7] 에서와같이 로표현될수있으므로, 상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는 파지력정보 (f c ) 는상기 [ 수학식 8] 과같이표현될수있다. [0077] 여기서상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 (f c ) 는, 상기전처리과정에 서수집된 (f j ) 의크기를초과하여출력될수있다. [0078] 본실시예에서임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 (f c ) 를출력할때는, 상기 [ 수학식 8] 에서의 m 차원의 A( ) 를, K 차원으로차원축소 (m > K) 된상기제 1 시너지벡터 (b k ) 들의집합 (A', ) 으로치환하여구성된 [ 수학식 9] 를이용하여출력한다. [0079] [ 수학식 9] [0080] [0081] 한편본실시예에서상기 [ 수학식 9] 의효용성을검증하기위하여, 상기전처리과정에서 6 개의상기전극센서 (10) 에서검출되며차원을축소하지않은 6 차원의상기제 2 생체신호 (V 2,j ) 로부터추정되는힘결과 ( 상기 [ 수학 식 2] 이용 ) 와상기전처리과정에서 3 차원으로차원축소된상기제 2 시너지벡터 (a j,k ) 들의집합으로부터추정 되는힘결과 ( 상기 [ 수학식 9] 이용 ) 를상기분류자세 (P j ) 마다비교할수있도록도 7 에도시하였다. [0082] 즉도 7 에서는, 사용자가상기분류자세 (P j ) 들중어느하나의자세를취하면서파지력을단조증가방식으로변 화시킬때, 상기힘측정센서로부터검출되는힘정보를파란실선으로도시하였으며, 상기 6 차원의상기제 2 생
11 체신호 (V 2,j ) 로부터추정되는힘결과 ( 상기 [ 수학식 2] 이용 ) 를빨간실선으로도시하였으며, 3차원으로차원축소된상기제2 시너지벡터 (a j,k ) 들의집합으로부터추정되는힘결과 ( 상기 [ 수학식 9] 이용 ) 를검은점선으로도시하였다. 도 7의 (a) 그래프는, 상기 P1(Thumb-Index Grip) 자세를취했을때의결과들이고, (b) 그래프는, P2(Thumb-2 Grip) 자세를취했을때의결과들이며, (c) 그래프는, P3(Thumb-3 Grip) 의자세를취했을때의결과들이다. [0083] 도 7 에도시된바와같이, 상기상기 6 차원의상기제 2 생체신호 (V 2,j ) 로부터추정되는힘결과 ( 상기 [ 수학식 2] 이용 ) 와, 3차원으로차원축소된상기제2 시너지벡터 (a j,k ) 들의집합으로부터추정되는힘결과 ( 상기 [ 수학식 9] 이용 ) 모두상기힘측정센서로부터검출되는힘정보의추세를잘반영하고있다. 또한, 상기상기 6차원의상기제2 생체신호 (V 2,j ) 로부터추정되는힘결과 ( 상기 [ 수학식 2] 이용 ) 와, 3차원으로차원축소된상기제2 시너지벡터 (a j,k ) 들의집합으로부터추정되는힘결과 ( 상기 [ 수학식 9] 이용 ) 사이에차이가거의없다는점에서, 상기 6개의근육들에서발생하는근전도신호사이에강한상관관계가있으며, 상기 6차원의생체신호 (V 1, V 2,j ) 를대신하여상기 3차원으로차원축소된시너지벡터 (b k, a j,k) 들의집합을이용하여파지력을추정하여도데이터손실이거의없다는장점이있다. [0084] 한편, 본실시예에서사용자가상기임의의파지자세 (P R ) 를취하면서파지력 (f R ) 를변화시킬때상기임의의파 지자세 (P R ) 로추정되는특정분류자세 (P c ) 를이용하여상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 (f c ) 를출력함으로써, 상기임의의파지자세 (P R ) 에서의파지력 (f R ) 을추정하는방법의효용성을검증하기위하여, 힘측정센서로부터검출되는힘정보와, 상기파지력정보 (f c ) 를상기분류자세 (P j ) 마다비교할수있도록도 8에도시하였다. [0085] 즉도 8 에서는, 사용자가상기분류자세 (P j ) 들중어느하나의자세를취하면서파지력을단조증가방식으로변 화시킬때, 상기힘측정센서로부터검출되는힘정보를파란실선으로도시하였으며, 임의의파지자세 (P R ) 로추정되는특정분류자세 (P c ) 를이용하여 3차원으로차원축소된상기제1 시너지벡터 (b k ) 들의집합으로부터출력되는파지력정보 (f c )( 상기 [ 수학식 9] 이용 ) 를빨간실선으로도시하였으며, 상기힘측정센서로부터검출되는힘정보와 3차원으로차원축소된상기제1 시너지벡터 (b k ) 들의집합으로부터출력되는파지력정보 (f c ) 사이의절대오차를검은점선으로도시하였다. 도 8의 (a) 그래프는, 상기 P1(Thumb-Index Grip) 자세를취했을때의결과들이고, (b) 그래프는, P2(Thumb-2 Grip) 자세를취했을때의결과들이며, (c) 그래프는, P3(Thumb-3 Grip) 의자세를취했을때의결과들이다. [0086] 도 8 에도시된바와같이, 임의의파지자세 (P R ) 로추정되는특정분류자세 (P c ) 를이용하여 3 차원으로차원축소 된상기제 1 시너지벡터 (b k ) 들의집합으로부터출력되는파지력정보 (f c ) 는상기힘측정센서로부터검출되는힘 정보의추세를잘반영하고있다. [0087] 또한상기임의의파지자세 (P R ) 로추정되는특정분류자세 (P c ) 를이용하여 3 차원으로차원축소된상기제 1 시 너지벡터 (b k ) 들의집합으로부터출력되는파지력정보 (f c ) 와, 상기힘측정센서로부터검출되는힘정보사이의절대오차가 3N 미만이라는점에서, 상기파지자세및파지력을추정하는장치 (100) 는, 상기전극센서 (10) 에의하여검출되는제1 생체신호 (V 1 ) 만으로임의의파지자세 (P R ) 를특정분류자세로 (P c ) 로추정할수있으며, 추정된상기특정분류자세 (P c ) 에따른상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 (P c ) 또한신뢰할만한수준으로획득할수있다는장점이있다. [0088] [0089] [0090] 이하에서는, 상술한구성의파지자세및파지력을추정하는장치 (100) 의작동하는방법의일례를설명하기로한다. 먼저, 사용자가임의의파지자세 (P) 를취하면서힘을가하는경우미리정한신체부위에부착된상기전극센서 (10) 는제1 생체신호 (V 1 ) 을검출하게된다. 이어서, 상기시너지추출부 (20) 는, 상기제1 생체신호 (V 1 ) 로부터상기주성분분석법을통해제1 시너지벡터
12 (b k ) 들을추출하게된다. [0091] 아울러, 상기파지자세추정부 (40) 는, 상기자세정보저장부 (30) 에저장되어있는상기분류자세 (P j ) 별상기제 2 시너지벡터 (a j,k ) 들과상기제 1 시너지벡터 (b k ) 들사이의가중된유클리드거리차이를계산하여, 상기거리 차이가최소가되도록하는특정분류자세 (P c ) 를추출함으로써, 상기임의의파지자세 (P R ) 를상기특정분류 자세 (P c ) 로추정하게된다. [0092] 이어서, 상기파지력추정부 (50) 는, 상기자세정보저장부 (30) 에저장되어있으며상기특정분류자세 (P c ) 에 대응하는변환행렬 (H c ) 을이용하여상기제 1 생체신호 (V 1 ) 로부터상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 (f c ) 를출력하게된다. [0093] 상술한구성의파지자세및파지력을추정하는장치 (100) 는, 미리정한신체부위에부착되어상기제 1 생체신 호 (V 1 ) 를검출할수있는전극센서 (10) 와, 상기검출된제 1 생체신호 (V 1 ) 에대한특징벡터인제 1 시너지벡터 (b k ) 를추출하는시너지추출부 (20) 와, 상기분류자세 (P j ) 별로상기제 2시너지벡터 (a j,k ) 및상기변환행렬 (H j ) 을저장하여포함하고있는자세정보저장부 (30) 와, 상기제1 시너지벡터 (b k ) 와상기제2 시너지벡터 (a j,k ) 사이의유사도를평가하여, 상기임의의파지자세 (P) 를상기분류자세 (P j ) 들중적어도하나의특정분류자세 (P c ) 로추정하는파지자세추정부 (40) 와, 상기변환행렬 (H j ) 을이용하여상기검출된제1 생체신호로 (V 1 ) 부터상기임의의파지자세 (P R ) 에서의파지력 (f R ) 을추정하는파지력추정부를포함하고있으므로, 사용자가임의의파지자세 (P R ) 를취할때발생하는제1 생체신호 (V 1 ) 로부터상기임의의파지자세 (P R ) 및파지력 (f R ) 을동시에연관시켜추정할수있는장점이있다. [0094] 그리고, 상기파지자세및파지력을추정하는장치 (100) 는, 상기제 1 생체신호 (V 1 ) 와제 2 생체신호 (V 2,j ) 가근 전도신호이므로, 해부학적관점에서인간의모든움직임은골격근의수축과이완에서비롯되므로파지자세및파지력을추정함에있어, 생체신호중가장관련성이있는근전도를이용한다는장점과, 상기전극센서 (10) 가상기근전도신호를검출할수있는근전도센서로서, 신체부위에부착하기만하면손쉽게근전도를검출할수있다는장점이있다. [0095] [0096] 또한, 상기파지자세및파지력을추정하는장치 (100) 는, 상기전극센서 (10) 가부착되는미리정한신체부위가, 사용자의손가락과손목의움직임을관장하는근육들이위치한부위들이므로, 상기파지자세및파지력을추정함에있어가장관련성이있는부위의근전도를측정하게되는바, 신뢰할만한결과를얻을수있게하는장점이있다. 그리고, 상기파지자세및파지력을추정하는장치 (100) 는, 상기제1 시너지벡터 (b k ) 와제2 시너지벡터 (a j,k ) 는, 검출되는생체신호에대해서소위주성분분석법을통해생성된고유벡터를이용하여차원축소되어추출되는것이므로, 파지자세및파지력을추정함에있어, 처리하는데이터의크기를줄이면서도상기제1 생체신호 (V 1 ) 와제2 생체신호 (V 2,j ) 의특징을필요한수준만큼반영할수있다는장점및시간지연을최소화시키면서파지자세및파지력을추정할수있다는장점이있다. [0097] 또한, 상기파지자세및파지력을추정하는장치 (100) 는, 상기제 2 생체신호 (V 2,j ) 에대응되는파지력 (f j ) 정보 가, 상기미리정한시간에따라파지력을변화시킬때검출되는힘정보로서, 힘측정센서를이용하여검출되는 것이므로, 상기제 2 생체신호 (V 2,j ) 와, 상기파지력 (f j ) 을상호선형성을가정할수있도록용이하게대응시킬 수있다는장점이있다. [0098] 그리고, 상기파지자세및파지력을추정하는장치 (100) 는, 상기파지자세추정부 (40) 가, 상기제 1 생체신호 시너지벡터 (b k ) 와상기제 2 생체신호시너지벡터 (a j,k ) 들사이의소위가중된유클리드거리차이를기초로하 여상기유사도를평가함으로써, 상기임의의파지자세 (P R ) 를상기분류자세 (P j ) 들중에서상기거리차이가최 소인적어도하나의상기특정분류자세 (P c ) 로추정하는바, 파지자세추정성공률을신뢰할만한수준으로획득 할수있다는장점이있다. [0099] 또한, 상기파지자세및파지력을추정하는장치 (100) 는. 상기파지력추정부 (50) 가, 상기파지자세추정부 (4-12 -
13 0) 에의하여추정된상기특정분류자세 (P c ) 에대응하는상기변환행렬 (H c ) 을이용하여, 상기제1 생체신호 (V 1 ) 가입력되면상기임의의파지자세 (P R ) 에서의파지력 (f R ) 으로추정할수있는파지력정보 (f c ) 가출력되도록하므로, 분류자세 (P j ) 별로전처리되어있는제2 생체신호 (V 2,j ) 와제2 생체신호에대응되는파지력 (f j ) 사이의선형변환행렬 (H c ) 를이용한다는점에서, 파지력추정오차율을저감시킬수있다는장점이있다. [0100] [0101] 한편, 본발명의일실시예에따른파지자세및파지력을추정하는장치 (100) 에서, 상기시너지추출부 (20) 와, 상기자세정보저장부 (30) 와, 상기파지자세추정부 (40) 와, 상기파지력추정부 (50) 에서수행되는기능은알고리즘이구축된기록매체에의하여수행될수있다. 또한상기파지자세및파지력을추정하는장치 (100) 는, 인간의의도를파악하여로봇핸드에전송하는구축되는알고리즘과함께, 인간의손을이용한로봇핸드의원격조작을원활히수행하기위하여이용될수있다. 이상에서는본발명의바람직한실시예및응용예에대하여도시하고설명하였지만, 본발명은상술한특정의실시예및응용예에한정되지아니하며, 청구범위에서청구하는본발명의요지를벗어남이없이당해발명이속하는기술분야에서통상의지식을가진자에의해변형실시가가능한것은물론이고, 이러한변형실시들은본발명의기술적사상이나전망으로부터개별적으로이해되어져서는안될것이다. [0102] 부호의설명 * 도면의주요부위에대한부호의설명 * 100 : 파지자세및파지력을추정하는장치 10 : 전극센서 20 : 시너지추출부 30 : 자세정보저장부 40 : 파지자세추정부 50 : 파지력추정부 도면 도면 1 도면
14 도면 3 도면

15 도면 5 도면
16 도면
17 도면
특허청구의 범위 청구항 1 복수개의 프리캐스트 콘크리트 부재(1)를 서로 결합하여 연속화시키는 구조로서, 삽입공이 형성되어 있고 상기 삽입공 내면에는 나사부가 형성되어 있는 너트형 고정부재(10)가, 상기 프리캐스 트 콘크리트 부재(1) 내에 내장되도록 배치되는 내부
를 서로 결합하여 연속화시키는 구조로서, 삽입공이 형성되어 있고 상기 삽입공 내면에는 나사부가 형성되어 있는 너트형 고정부재(10)가, 상기 프리캐스 트 콘크리트 부재(1) 내에 내장되도록 배치되는 내부") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) E01D 19/12 (2006.01) E01D 2/00 (2006.01) E01D 21/00 (2006.01) (21) 출원번호 10-2011-0036938 (22) 출원일자 2011년04월20일 심사청구일자 2011년04월20일 (65) 공개번호 10-2012-0119156
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) E01D 19/12 (2006.01) E01D 2/00 (2006.01) E01D 21/00 (2006.01) (21) 출원번호 10-2011-0036938 (22) 출원일자 2011년04월20일 심사청구일자 2011년04월20일 (65) 공개번호 10-2012-0119156
특허청구의범위청구항 1 복수의영상검출부로부터출력되는영상의히스토그램 (histogram) 을계산하는단계 ; 상기복수의영상검출부로부터출력되는영상을히스토그램평활화 (histogram equalization) 하는단계 ; 상기복수의영상검출부중하나의영상검출부를선택하는단계 ; 및
 을계산하는단계 ; 상기복수의영상검출부로부터출력되는영상을히스토그램평활화 (histogram equalization) 하는단계 ; 상기복수의영상검출부중하나의영상검출부를선택하는단계 ; 및") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년12월18일 (11) 등록번호 10-1473415 (24) 등록일자 2014년12월10일 (51) 국제특허분류 (Int. Cl.) G06T 5/40 (2006.01) H04N 5/217 (2011.01) (21) 출원번호 10-2012-0156871 (22) 출원일자 2012
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년12월18일 (11) 등록번호 10-1473415 (24) 등록일자 2014년12월10일 (51) 국제특허분류 (Int. Cl.) G06T 5/40 (2006.01) H04N 5/217 (2011.01) (21) 출원번호 10-2012-0156871 (22) 출원일자 2012
Microsoft PowerPoint - MDA 2008Fall Ch2 Matrix.pptx
 Mti Matrix 정의 A collection of numbers arranged into a fixed number of rows and columns 측정변수 (p) 개체 x x... x 차수 (nxp) 인행렬matrix (n) p 원소 {x ij } x x... x p X = 열벡터column vector 행벡터row vector xn xn... xnp
Mti Matrix 정의 A collection of numbers arranged into a fixed number of rows and columns 측정변수 (p) 개체 x x... x 차수 (nxp) 인행렬matrix (n) p 원소 {x ij } x x... x p X = 열벡터column vector 행벡터row vector xn xn... xnp
서 인코딩한 데이터를 무선으로 송신하기 위한 무선 송신 수단; 및 통화중 상기 입력 수단으로부터의 음원 데이터 전송신 호에 따라 상기 저장 수단에 저장되어 있는 해당 음원 데이터를 상기 디코딩 수단에 의해 디코딩하고, 상기 디코딩한 음원 데이터와 상기 입력 수단을 통해
 (51) Int. Cl. H04B 1/40 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월23일 10-0646983 2006년11월09일 (21) 출원번호 10-2004-0053063 (65) 공개번호 10-2006-0004082 (22) 출원일자 2004년07월08일
(51) Int. Cl. H04B 1/40 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월23일 10-0646983 2006년11월09일 (21) 출원번호 10-2004-0053063 (65) 공개번호 10-2006-0004082 (22) 출원일자 2004년07월08일
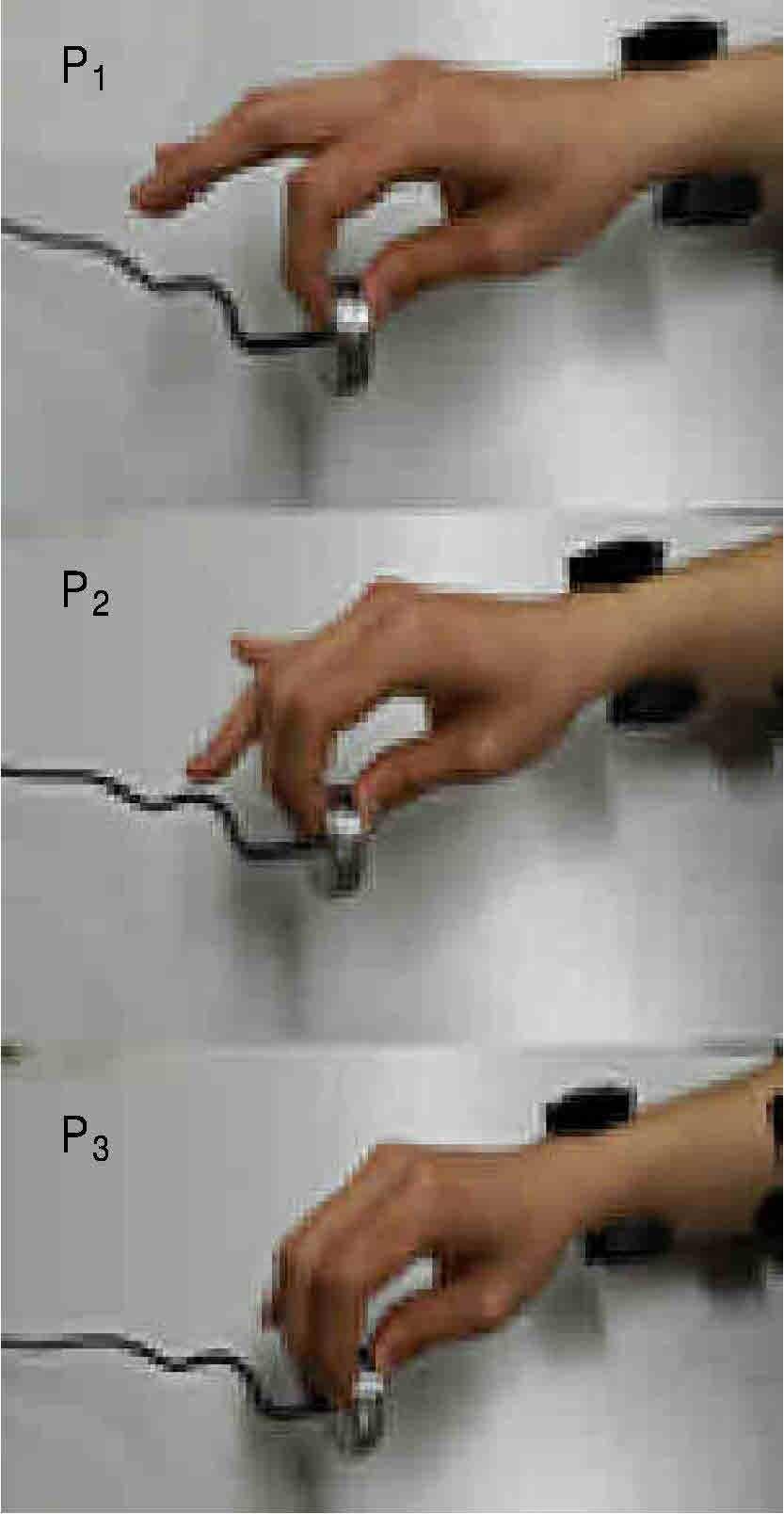
이발명을지원한국가연구개발사업 과제고유번호 부처명 미래창조부 연구관리전문기관 한국산업기술평가관리원 연구사업명 산업융합원천기술개발 연구과제명 단일노드 48TB 이상을지원하는개방형하둡스토리지어플라이언스 (Hadoop Storage Appliance) 개발 기
 개발 기") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2015년12월03일 (11) 등록번호 10-1573375 (24) 등록일자 2015년11월25일 (51) 국제특허분류 (Int. Cl.) G06F 12/08 (2006.01) (21) 출원번호 10-2013-0131411 (22) 출원일자 2013 년 10 월 31 일 심사청구일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2015년12월03일 (11) 등록번호 10-1573375 (24) 등록일자 2015년11월25일 (51) 국제특허분류 (Int. Cl.) G06F 12/08 (2006.01) (21) 출원번호 10-2013-0131411 (22) 출원일자 2013 년 10 월 31 일 심사청구일자
(72) 발명자경진호대전유성구지족동열매마을아파트 박찬훈대전서구둔산동크로바아파트 101동 201호 박동일 대전유성구지족동열매마을아파트 101 동 1401 호 이발명을지원한국가연구개발사업 과제고유번호 MO1940 부처명 지식경제부 연구사업명 지경부-국가연구
 발명자경진호대전유성구지족동열매마을아파트 박찬훈대전서구둔산동크로바아파트 101동 201호 박동일 대전유성구지족동열매마을아파트 101 동 1401 호 이발명을지원한국가연구개발사업 과제고유번호 MO1940 부처명 지식경제부 연구사업명 지경부-국가연구") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B25J 13/08 (2006.01) B25J 9/16 (2006.01) B25J 15/00 (2006.01) (21) 출원번호 10-2012-0028017 (22) 출원일자 2012 년 03 월 20 일 심사청구일자 (56) 선행기술조사문헌 JP2002264059
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B25J 13/08 (2006.01) B25J 9/16 (2006.01) B25J 15/00 (2006.01) (21) 출원번호 10-2012-0028017 (22) 출원일자 2012 년 03 월 20 일 심사청구일자 (56) 선행기술조사문헌 JP2002264059
이 발명을 지원한 국가연구개발사업 과제고유번호 20110026962 부처명 교육과학기술부 연구사업명 기초사업연구-일반연구자지원사업-기본연구지원사업(유형II) 연구과제명 시공간 부호 협력 통신을 위한 동기 알고리즘 연구 기 여 율 1/1 주관기관 서울시립대학교 산학협력단
 연구과제명 시공간 부호 협력 통신을 위한 동기 알고리즘 연구 기 여 율 1/1 주관기관 서울시립대학교 산학협력단") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H04J 11/00 (2006.01) (21) 출원번호 10-2012-0038191 (22) 출원일자 2012년04월13일 심사청구일자 2012년04월13일 (65) 공개번호 10-2013-0115668 (43) 공개일자 2013년10월22일 (56) 선행기술조사문헌
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H04J 11/00 (2006.01) (21) 출원번호 10-2012-0038191 (22) 출원일자 2012년04월13일 심사청구일자 2012년04월13일 (65) 공개번호 10-2013-0115668 (43) 공개일자 2013년10월22일 (56) 선행기술조사문헌
특허청구의 범위 청구항 1 제1 내지 제6 암이 각각의 관절부를 가지며 형성되며, 상기 제1 내지 제6 암 각각은 제1 내지 제6 링크에 의해 링크되고, 상기 제1 내지 제6 암 내부에는 각각의 암을 구동하는 구동모듈이 각각 내장되며, 상기 구동모듈 각각의 선단에는 1
 (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B25J 9/06 (2006.01) B25J 19/02 (2006.01) (21) 출원번호 10-2011-0079361 (22) 출원일자 2011년08월10일 심사청구일자 2011년08월10일 (65) 공개번호 10-2013-0017122 (43) 공개일자 2013년02월20일
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B25J 9/06 (2006.01) B25J 19/02 (2006.01) (21) 출원번호 10-2011-0079361 (22) 출원일자 2011년08월10일 심사청구일자 2011년08월10일 (65) 공개번호 10-2013-0017122 (43) 공개일자 2013년02월20일
1 경영학을 위한 수학 Final Exam 2015/12/12(토) 13:00-15:00 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오. 1. (각 6점) 다음 적분을 구하시오 Z 1 4 Z 1 (x + 1) dx (a) 1 (x 1)4 dx 1 Solut
 13:00-15:00 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오. 1. (각 6점) 다음 적분을 구하시오 Z 1 4 Z 1 (x + 1) dx (a) 1 (x 1)4 dx 1 Solut") 경영학을 위한 수학 Fial Eam 5//(토) :-5: 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오.. (각 6점) 다음 적분을 구하시오 4 ( ) (a) ( )4 8 8 (b) d이 성립한다. d C C log log (c) 이다. 양변에 적분을 취하면 log C (d) 라 하자. 그러면 d 4이다. 9 9 4 / si (e) cos si
경영학을 위한 수학 Fial Eam 5//(토) :-5: 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오.. (각 6점) 다음 적분을 구하시오 4 ( ) (a) ( )4 8 8 (b) d이 성립한다. d C C log log (c) 이다. 양변에 적분을 취하면 log C (d) 라 하자. 그러면 d 4이다. 9 9 4 / si (e) cos si
이 발명을 지원한 국가연구개발사업 과제고유번호 A1100-0801-2739 부처명 지식경제부 연구관리전문기관 연구사업명 IT핵심기술개발 연구과제명 융합형 포털서비스를 위한 이용자 참여형 방송기술개발 기여율 주관기관 전자부품연구원 연구기간 2008년 03월 01일 ~ 2
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G06Q 30/00 (2006.01) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0133476 (22) 출원일자 2008년12월24일 심사청구일자 2008년12월24일 (65) 공개번호 10-2010-0074918 (43) 공개일자 2010년07월02일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G06Q 30/00 (2006.01) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0133476 (22) 출원일자 2008년12월24일 심사청구일자 2008년12월24일 (65) 공개번호 10-2010-0074918 (43) 공개일자 2010년07월02일
한것으로스마트단말기에의하여드론조종앱을설치하는제 1 단계 ; 스마트단말기에의하여드론의불루투스통 신부에부여된고유식별번호를입력저장하고드론의불루투스를인식하며드론의블루투스통신부로부터회신되 는신호의수신레벨을분석하여최대통신거리를확인하여저장하는제 2 단계 ; 스마트단말기에의하여최대통
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B64C 13/20 (2006.01) B64C 39/02 (2006.01) G05D 1/00 (2006.01) H04M 1/725 (2006.01) (52) CPC 특허분류 B64C 13/20 (2013.01) B64C 39/024 (2013.01) (21)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B64C 13/20 (2006.01) B64C 39/02 (2006.01) G05D 1/00 (2006.01) H04M 1/725 (2006.01) (52) CPC 특허분류 B64C 13/20 (2013.01) B64C 39/024 (2013.01) (21)
(72) 발명자 오승용 경기도안산시상록구오목로 11 길 45, 202 호 ( 본오동 ) 박영욱 경기도수원시권선구당진로 31 번길 16, 한라비발디 202 동 1201 호 ( 당수동 ) 고대화 경기도수원시권선구금호로 189 번길 82-12, 202 호 ( 구운동 ) 김준
 발명자 오승용 경기도안산시상록구오목로 11 길 45, 202 호 ( 본오동 ) 박영욱 경기도수원시권선구당진로 31 번길 16, 한라비발디 202 동 1201 호 ( 당수동 ) 고대화 경기도수원시권선구금호로 189 번길 82-12, 202 호 ( 구운동 ) 김준") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2013년06월24일 (11) 등록번호 10-1278021 (24) 등록일자 2013년06월18일 (51) 국제특허분류 (Int. Cl.) B65G 1/12 (2006.01) B65G 1/06 (2006.01) H01L 21/677 (2006.01) B25J 5/00 (2006.01)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2013년06월24일 (11) 등록번호 10-1278021 (24) 등록일자 2013년06월18일 (51) 국제특허분류 (Int. Cl.) B65G 1/12 (2006.01) B65G 1/06 (2006.01) H01L 21/677 (2006.01) B25J 5/00 (2006.01)
(72) 발명자 박세웅 서울특별시관악구신림동산 56-1 서울대학교뉴미디어통신공동연구소 최진구 서울특별시영등포구당산동 2 가대우메종아파트 101 동 909 호 - 2 -
 발명자 박세웅 서울특별시관악구신림동산 56-1 서울대학교뉴미디어통신공동연구소 최진구 서울특별시영등포구당산동 2 가대우메종아파트 101 동 909 호 - 2 -") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) H04B 7/26 (2006.01) H04B 7/155 (2006.01) H04Q 7/30 (2006.01) H04Q 7/20 (2006.01) (21) 출원번호 10-2006-0085572 (22) 출원일자 2006 년 09 월 06 일 심사청구일자 2006 년 09 월
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) H04B 7/26 (2006.01) H04B 7/155 (2006.01) H04Q 7/30 (2006.01) H04Q 7/20 (2006.01) (21) 출원번호 10-2006-0085572 (22) 출원일자 2006 년 09 월 06 일 심사청구일자 2006 년 09 월
이발명을지원한국가연구개발사업 과제고유번호 NRF-2012R1A1A4A 부처명 교육과학기술부 연구관리전문기관 한국연구재단 연구사업명 지역대학우수과학자지원사업 연구과제명 저주파신호와바이스태틱레이다를동시에이용한스텔스형표적의인식에관한연구 기여율 1/1 주관기관
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년11월12일 (11) 등록번호 10-1460591 (24) 등록일자 2014년11월05일 (51) 국제특허분류 (Int. Cl.) G01S 13/44 (2006.01) G01S 13/02 (2006.01) (21) 출원번호 10-2013-0049810 (22) 출원일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년11월12일 (11) 등록번호 10-1460591 (24) 등록일자 2014년11월05일 (51) 국제특허분류 (Int. Cl.) G01S 13/44 (2006.01) G01S 13/02 (2006.01) (21) 출원번호 10-2013-0049810 (22) 출원일자
(72) 발명자 김현석 인천광역시남구관교동신비마을아파트 110 동 차홍파 중국길림성연길시공원가원춘위 7 조, 연변대학교 19 빌딩 4 단원 1 층서 김영환 경상북도포항시남구효자동산 31 번지포항공과대학교전자전기공학과 배태일 경상북도포항시남구
 발명자 김현석 인천광역시남구관교동신비마을아파트 110 동 차홍파 중국길림성연길시공원가원춘위 7 조, 연변대학교 19 빌딩 4 단원 1 층서 김영환 경상북도포항시남구효자동산 31 번지포항공과대학교전자전기공학과 배태일 경상북도포항시남구") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G06F 17/50 (2006.01) H01L 21/00 (2006.01) (21) 출원번호 10-2008-0129152 (22) 출원일자 2008 년 12 월 18 일 심사청구일자 2008 년 12 월 18 일 (65) 공개번호 10-2010-0070560 (43) 공개일자
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G06F 17/50 (2006.01) H01L 21/00 (2006.01) (21) 출원번호 10-2008-0129152 (22) 출원일자 2008 년 12 월 18 일 심사청구일자 2008 년 12 월 18 일 (65) 공개번호 10-2010-0070560 (43) 공개일자
(72) 발명자 권욱현 서울특별시관악구관악로 1, 서울대학교자동화연구소 133 동 306 호 ( 신림동 ) 신수용 서울특별시양천구목동동로 130, 목동아파트 동 1201 호 ( 신정동 ) 최재영 서울특별시관악구서림 11 길 23, 308 호 ( 신림동 ) 이
 발명자 권욱현 서울특별시관악구관악로 1, 서울대학교자동화연구소 133 동 306 호 ( 신림동 ) 신수용 서울특별시양천구목동동로 130, 목동아파트 동 1201 호 ( 신정동 ) 최재영 서울특별시관악구서림 11 길 23, 308 호 ( 신림동 ) 이") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04L 12/28 (2006.01) (21) 출원번호 10-2006-0016507 (22) 출원일자 2006 년 02 월 21 일 심사청구일자 2011 년 01 월 19 일 (65) 공개번호 10-2007-0083321 (43) 공개일자 2007 년 08
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04L 12/28 (2006.01) (21) 출원번호 10-2006-0016507 (22) 출원일자 2006 년 02 월 21 일 심사청구일자 2011 년 01 월 19 일 (65) 공개번호 10-2007-0083321 (43) 공개일자 2007 년 08
본 발명은 중공코어 프리캐스트 슬래브 및 그 시공방법에 관한 것으로, 자세하게는 중공코어로 형성된 프리캐스트 슬래브 에 온돌을 일체로 구성한 슬래브 구조 및 그 시공방법에 관한 것이다. 이를 위한 온돌 일체형 중공코어 프리캐스트 슬래브는, 공장에서 제작되는 중공코어 프
 (51) Int. Cl. E04B 5/32 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2007년03월12일 10-0693122 2007년03월05일 (21) 출원번호 10-2006-0048965 (65) 공개번호 (22) 출원일자 2006년05월30일 (43) 공개일자 심사청구일자
(51) Int. Cl. E04B 5/32 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2007년03월12일 10-0693122 2007년03월05일 (21) 출원번호 10-2006-0048965 (65) 공개번호 (22) 출원일자 2006년05월30일 (43) 공개일자 심사청구일자
Vector Differential: 벡터 미분 Yonghee Lee October 17, 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표
 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표") Vector Differential: 벡터 미분 Yonhee Lee October 7, 08 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표기법을 정의하는 방법이다 보통 스칼라(scalar)에 대한 미분은 일분수 함수 f : < < 또는 다변수 함수(function
Vector Differential: 벡터 미분 Yonhee Lee October 7, 08 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표기법을 정의하는 방법이다 보통 스칼라(scalar)에 대한 미분은 일분수 함수 f : < < 또는 다변수 함수(function
특허청구의범위청구항 1 선박의안티재머 (Anti-Jammer) 위성항법시스템으로서, GPS 신호및 DGPS 신호를자함의 INS(Intertial Navigation System) 신호와비교하여기준오차범위초과시수신되는 GPS 신호와 DGPS 신호를재밍 (Jamming)
 위성항법시스템으로서, GPS 신호및 DGPS 신호를자함의 INS(Intertial Navigation System) 신호와비교하여기준오차범위초과시수신되는 GPS 신호와 DGPS 신호를재밍 (Jamming)") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2014-0044048 (43) 공개일자 2014년04월14일 (51) 국제특허분류 (Int. Cl.) G01S 19/07 (2010.01) (21) 출원번호 10-2012-0109967 (22) 출원일자 2012 년 10 월 04 일 심사청구일자 없음 전체청구항수 : 총 4
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2014-0044048 (43) 공개일자 2014년04월14일 (51) 국제특허분류 (Int. Cl.) G01S 19/07 (2010.01) (21) 출원번호 10-2012-0109967 (22) 출원일자 2012 년 10 월 04 일 심사청구일자 없음 전체청구항수 : 총 4
특허청구의범위청구항 1 물을여과하는필터부 ; 상기필터부에물을유동시키는정수관 ; 상기정수관에설치되고, 상기정수관의수류를이용하여전기를발생시키는발전모듈 ; 및상기정수관에배치되고, 상기발전모듈에서발생된전기가공급되고, 상기정수관을따라유동되는정수를전기분해하여살균하는살균모듈 ; 을
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) B01D 35/00 (2006.01) C02F 1/461 (2006.01) C02F 1/467 (2006.01) (21) 출원번호 10-2009-0019000 (22) 출원일자 2009 년 03 월 05 일 심사청구일자 없음 전체청구항수 : 총 4 항 (54) 정수기 (11)
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) B01D 35/00 (2006.01) C02F 1/461 (2006.01) C02F 1/467 (2006.01) (21) 출원번호 10-2009-0019000 (22) 출원일자 2009 년 03 월 05 일 심사청구일자 없음 전체청구항수 : 총 4 항 (54) 정수기 (11)
(72) 발명자 김도규 서울특별시성북구장위 3 동 박준일 서울특별시강서구등촌동 서광아파트 103 동 803 호 유형규 경기도광명시광명 4 동한진아파트 101 동 1801 호 - 2 -
 발명자 김도규 서울특별시성북구장위 3 동 박준일 서울특별시강서구등촌동 서광아파트 103 동 803 호 유형규 경기도광명시광명 4 동한진아파트 101 동 1801 호 - 2 -") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) F25B 30/06 (2006.01) (21) 출원번호 10-2008-0088941 (22) 출원일자 2008 년 09 월 09 일 심사청구일자 전체청구항수 : 총 7 항 2008 년 09 월 09 일 (54) 지중열교환기의공급파이프 (11) 공개번호 10-2010-0030143
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) F25B 30/06 (2006.01) (21) 출원번호 10-2008-0088941 (22) 출원일자 2008 년 09 월 09 일 심사청구일자 전체청구항수 : 총 7 항 2008 년 09 월 09 일 (54) 지중열교환기의공급파이프 (11) 공개번호 10-2010-0030143
도 1 명세서 도면의 간단한 설명 도 1은 본 발명의 일실시예에 따른 비접촉 USB 리더기의 블럭도를 나타낸다. 도 2는 도 1의 비접촉 USB 리더기를 이용한 인프라 구축 시스템의 개략도를 나타낸다. 도 3은 도 1의 비접촉 USB 리더기를 이용한 이용 방법에 대한
 (51) Int. Cl. G06K 7/00 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월01일 10-0639964 2006년10월24일 (21) 출원번호 10-2004-0077732 (65) 공개번호 10-2006-0028855 (22) 출원일자 2004년09월30일
(51) Int. Cl. G06K 7/00 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월01일 10-0639964 2006년10월24일 (21) 출원번호 10-2004-0077732 (65) 공개번호 10-2006-0028855 (22) 출원일자 2004년09월30일
특허청구의 범위 청구항 1 일반전화를 이용한 위험 알림시스템 및 실시간 영상전송 장치에서 CID(콜백넘버) 장치를 포함한 서버 및 그 장 비를 포함하며, 영상서버와 연동한 형태를 상황실에 전송하여 출동하는 시스템을 포함하는 것을 특징으로 하는 일반전화를 이용한 위험 알
 장치를 포함한 서버 및 그 장 비를 포함하며, 영상서버와 연동한 형태를 상황실에 전송하여 출동하는 시스템을 포함하는 것을 특징으로 하는 일반전화를 이용한 위험 알") (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2014-0008486 (43) 공개일자 2014년01월21일 (51) 국제특허분류(Int. Cl.) G08B 25/08 (2014.01) G08B 21/02 (2006.01) G08B 13/196 (2006.01) (21) 출원번호 10-2012-0075069 (22) 출원일자
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2014-0008486 (43) 공개일자 2014년01월21일 (51) 국제특허분류(Int. Cl.) G08B 25/08 (2014.01) G08B 21/02 (2006.01) G08B 13/196 (2006.01) (21) 출원번호 10-2012-0075069 (22) 출원일자
이 발명을 지원한 국가연구개발사업 과제고유번호 08921-01304 부처명 방송통신위원회 연구사업명 방송통신기술개발사업 연구과제명 안전한 전자파환경 조성 주관기관 한국전자통신연구원 연구기간 2008.01.01 ~ 2012.12.31-2 -
 (19) 대한민국특허청(KR) (12) 공개특허공보(A) (51) 국제특허분류(Int. Cl.) H05K 9/00 (2006.01) H04B 1/38 (2006.01) (21) 출원번호 10-2011-0134285 (22) 출원일자 2011년12월14일 심사청구일자 없음 기술이전 희망 : 기술양도, 실시권허여, 기술지도 전체 청구항 수 : 총 1 항 (54)
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (51) 국제특허분류(Int. Cl.) H05K 9/00 (2006.01) H04B 1/38 (2006.01) (21) 출원번호 10-2011-0134285 (22) 출원일자 2011년12월14일 심사청구일자 없음 기술이전 희망 : 기술양도, 실시권허여, 기술지도 전체 청구항 수 : 총 1 항 (54)
Æí¶÷4-¼Ö·ç¼Çc03ÖÁ¾š
 솔루션 2006 454 2006 455 2006 456 2006 457 2006 458 2006 459 2006 460 솔루션 2006 462 2006 463 2006 464 2006 465 2006 466 솔루션 2006 468 2006 469 2006 470 2006 471 2006 472 2006 473 2006 474 2006 475 2006 476
솔루션 2006 454 2006 455 2006 456 2006 457 2006 458 2006 459 2006 460 솔루션 2006 462 2006 463 2006 464 2006 465 2006 466 솔루션 2006 468 2006 469 2006 470 2006 471 2006 472 2006 473 2006 474 2006 475 2006 476
(52) CPC 특허분류 B01D 53/62 ( ) Y02C 10/10 ( ) (72) 발명자 이정현 대전광역시서구대덕대로 246 넥서스밸리 B 동 1417 호 박영철 대전광역시유성구반석동로 33 반석마을 5 단지아파트 505 동 201 호 이발명
 CPC 특허분류 B01D 53/62 ( ) Y02C 10/10 ( ) (72) 발명자 이정현 대전광역시서구대덕대로 246 넥서스밸리 B 동 1417 호 박영철 대전광역시유성구반석동로 33 반석마을 5 단지아파트 505 동 201 호 이발명") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B01D 53/22 (2006.01) B01D 53/62 (2006.01) (52) CPC 특허분류 B01D 53/225 (2013.01) B01D 53/228 (2013.01) (21) 출원번호 10-2015-0076621 (22) 출원일자 2015 년
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B01D 53/22 (2006.01) B01D 53/62 (2006.01) (52) CPC 특허분류 B01D 53/225 (2013.01) B01D 53/228 (2013.01) (21) 출원번호 10-2015-0076621 (22) 출원일자 2015 년
위해충전효율및온도변화를측정하는신호측정센서층을포함하여구성되는것을그구성상의특징으로한다. 본발명은인체삽입형의료기기의성능평가용인체유사팬텀의제조방법에관한것으로서, 보다구체적으로는인체유사팬텀의제조방법으로서, (1) 정제수, 액체상태의아가로오스 (agarose) 및소듐클로라이드 (
 정제수, 액체상태의아가로오스 (agarose) 및소듐클로라이드 (") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) A61B 6/00 (2006.01) (52) CPC 특허분류 A61B 6/583 (2013.01) (21) 출원번호 10-2015-0025541 (22) 출원일자 2015 년 02 월 24 일 심사청구일자 2015 년 02 월 24 일 (65) 공개번호 10-2016-0103273
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) A61B 6/00 (2006.01) (52) CPC 특허분류 A61B 6/583 (2013.01) (21) 출원번호 10-2015-0025541 (22) 출원일자 2015 년 02 월 24 일 심사청구일자 2015 년 02 월 24 일 (65) 공개번호 10-2016-0103273
특허청구의 범위 청구항 1 알람을 출력하기 위한 출력 인터페이스; 사용자의 안구전도값을 측정하기 위한 안구전도 측정부; 및 상기 안구전도 측정부가 측정한 안구전도값을 이용하여 사용자의 졸음 상태를 감지하고, 그에 따라 상기 출력 인터페이스로 알람을 출력하는 졸음상태 판
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) A61B 5/0496 (2006.01) A61B 5/18 (2006.01) (21) 출원번호 10-2009-0051767 (22) 출원일자 2009년06월11일 심사청구일자 2009년06월11일 (65) 공개번호 10-2010-0133070 (43) 공개일자 2010년12월21일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) A61B 5/0496 (2006.01) A61B 5/18 (2006.01) (21) 출원번호 10-2009-0051767 (22) 출원일자 2009년06월11일 심사청구일자 2009년06월11일 (65) 공개번호 10-2010-0133070 (43) 공개일자 2010년12월21일
 (Hyunoo Shim) 1 / 24 (Discrete-time Markov Chain) * 그림 이산시간이다연쇄 (chain) 이다왜 Markov? (See below) ➀ 이산시간연쇄 (Discrete-time chain): : Y Y 의상태공간 = {0, 1, 2,..., n} Y n Y 의 n 시점상태 {Y n = j} Y 가 n 시점에상태 j 에있는사건
(Hyunoo Shim) 1 / 24 (Discrete-time Markov Chain) * 그림 이산시간이다연쇄 (chain) 이다왜 Markov? (See below) ➀ 이산시간연쇄 (Discrete-time chain): : Y Y 의상태공간 = {0, 1, 2,..., n} Y n Y 의 n 시점상태 {Y n = j} Y 가 n 시점에상태 j 에있는사건
등록특허 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 ( ) (21) 출원번호 (22) 출원일자 2011 년 12 월 28 일 심사
 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 ( ) (21) 출원번호 (22) 출원일자 2011 년 12 월 28 일 심사") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 (2006.01) (21) 출원번호 10-2011-0144999 (22) 출원일자 2011 년 12 월 28 일 심사청구일자 2011 년 12 월 28 일 (65) 공개번호 10-2013-0076416 (43) 공개일자 2013 년 07
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 (2006.01) (21) 출원번호 10-2011-0144999 (22) 출원일자 2011 년 12 월 28 일 심사청구일자 2011 년 12 월 28 일 (65) 공개번호 10-2013-0076416 (43) 공개일자 2013 년 07

대 표 도 - 2 -
 (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2013-0062307 (43) 공개일자 2013년06월12일 (51) 국제특허분류(Int. Cl.) G06Q 30/02 (2012.01) (21) 출원번호 10-2013-0053925(분할) (22) 출원일자 2013년05월13일 심사청구일자 2013년05월13일 (62) 원출원
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2013-0062307 (43) 공개일자 2013년06월12일 (51) 국제특허분류(Int. Cl.) G06Q 30/02 (2012.01) (21) 출원번호 10-2013-0053925(분할) (22) 출원일자 2013년05월13일 심사청구일자 2013년05월13일 (62) 원출원
특허청구의범위청구항 1 다관절로봇의각축별시간에대한위치함수를 4차다항식, 속도함수를 3차다항식, 가속도함수를 2차다항식으로정의하고, 상기위치함수, 속도함수및가속도함수의경계조건을이용하여계수들을계산하여가속구간, 등속구간및감속구간에서의시간에대한위치함수을구하고, 상기가속구간,
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년08월01일 (11) 등록번호 10-1425057 (24) 등록일자 2014년07월24일 (51) 국제특허분류 (Int. Cl.) B25J 13/00 (2006.01) G06F 17/00 (2006.01) (21) 출원번호 10-2013-0028521 (22) 출원일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년08월01일 (11) 등록번호 10-1425057 (24) 등록일자 2014년07월24일 (51) 국제특허분류 (Int. Cl.) B25J 13/00 (2006.01) G06F 17/00 (2006.01) (21) 출원번호 10-2013-0028521 (22) 출원일자
실용신안 등록청구의 범위 청구항 1 톤백마대가 설치될 수 있도록 일정간격을 두고 설치되는 한 쌍의 지지프레임과, 상기 지지프레임과 지지프레임의 상부를 서로 연결하는 한 쌍의 연결프레임과, 상기 연결프레임의 상부에 일정간격을 두고 다수 설치되어 상기 톤백마대와 그 투입구
 (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) (51) 국제특허분류(Int. Cl.) B65B 67/12 (2006.01) B65D 88/16 (2006.01) (21) 출원번호 20-2012-0003587 (22) 출원일자 2012년05월01일 심사청구일자 2012년05월01일 (11) 공개번호 20-2013-0006479 (43) 공개일자
(19) 대한민국특허청(KR) (12) 공개실용신안공보(U) (51) 국제특허분류(Int. Cl.) B65B 67/12 (2006.01) B65D 88/16 (2006.01) (21) 출원번호 20-2012-0003587 (22) 출원일자 2012년05월01일 심사청구일자 2012년05월01일 (11) 공개번호 20-2013-0006479 (43) 공개일자
(72) 발명자 배경렬 대구광역시동구아양로 37 길 ( 신암동 ) 손현식 대구광역시동구송라로 109( 신암동 ) 이발명을지원한국가연구개발사업 과제고유번호 부처명 지식경제부 연구사업명 정보통신기술인력양성 연구과제명 스마트자동차를위한 AU
 발명자 배경렬 대구광역시동구아양로 37 길 ( 신암동 ) 손현식 대구광역시동구송라로 109( 신암동 ) 이발명을지원한국가연구개발사업 과제고유번호 부처명 지식경제부 연구사업명 정보통신기술인력양성 연구과제명 스마트자동차를위한 AU") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04N 13/00 (2006.01) (21) 출원번호 10-2012-0128809 (22) 출원일자 2012 년 11 월 14 일 심사청구일자 2012 년 11 월 14 일 (65) 공개번호 10-2013-0058611 (43) 공개일자 2013 년 06
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04N 13/00 (2006.01) (21) 출원번호 10-2012-0128809 (22) 출원일자 2012 년 11 월 14 일 심사청구일자 2012 년 11 월 14 일 (65) 공개번호 10-2013-0058611 (43) 공개일자 2013 년 06
많이 이용하는 라면,햄버그,과자,탄산음료등은 무서운 병을 유발하고 비만의 원인 식품 이다. 8,등겨에 흘려 보낸 영양을 되 찾을 수 있다. 도정과정에서 등겨에 흘려 보낸 영양 많은 쌀눈과 쌀껍질의 영양을 등겨를 물에 우러나게하여 장시간 물에 담가 두어 영양을 되 찾는다
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) A23L 1/307 (2006.01) C02F 1/68 (2006.01) (21) 출원번호 20-2011-0002850 (22) 출원일자 2011년04월05일 심사청구일자 2011년04월05일 (11) 공개번호 20-2011-0004312 (43) 공개일자 2011년05월03일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) A23L 1/307 (2006.01) C02F 1/68 (2006.01) (21) 출원번호 20-2011-0002850 (22) 출원일자 2011년04월05일 심사청구일자 2011년04월05일 (11) 공개번호 20-2011-0004312 (43) 공개일자 2011년05월03일
완벽한개념정립 _ 행렬의참, 거짓 수학전문가 NAMU 선생 1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에
,, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에") 1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에대하여 AB=BA 1 가성립한다 2 3 (4) 이면 1 곱셈공식및변형공식성립 ± ± ( 복호동순 ), 2 지수법칙성립 (은자연수 ) < 거짓인명제 >
1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에대하여 AB=BA 1 가성립한다 2 3 (4) 이면 1 곱셈공식및변형공식성립 ± ± ( 복호동순 ), 2 지수법칙성립 (은자연수 ) < 거짓인명제 >
실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
PowerPoint 프레젠테이션
 03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
명세서청구범위청구항 1 갠트리의헤드로부터방사선을조사하는선형가속기에사용되고, 상기헤드에설치되고, 방사선이조사되는환자의치료중심을향해레이저를쏘고환자의체표면에서반사된레이저를감지하여환자의체표면까지의거리를측정하는레이저거리측정기 ; 상기레이저거리측정기의데이터를수신하여 SSD(sou
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) A61N 5/10 (2006.01) (21) 출원번호 10-2014-0107105 (22) 출원일자 2014 년 08 월 18 일 심사청구일자 (56) 선행기술조사문헌 JP2012024909 A* JP2012501792 A* US20100280374 A1
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) A61N 5/10 (2006.01) (21) 출원번호 10-2014-0107105 (22) 출원일자 2014 년 08 월 18 일 심사청구일자 (56) 선행기술조사문헌 JP2012024909 A* JP2012501792 A* US20100280374 A1
장연립방정식을풀기위한반복법 12.1 선형시스템 : Gauss-Seidel 12.2 비선형시스템 12.1 선형시스템 : Gauss-Seidel (1/10) 반복법은초기근을가정한후에더좋은근의값을추정하는체계적인절차를이용한다. G-S 방법은선형대수방정
 반복법은초기근을가정한후에더좋은근의값을추정하는체계적인절차를이용한다. G-S 방법은선형대수방정") . 선형시스템 : GussSedel. 비선형시스템. 선형시스템 : GussSedel (/0) 반복법은초기근을가정한후에더좋은근의값을추정하는체계적인절차를이용한다. GS 방법은선형대수방정식을푸는반복법중에서 가장보편적으로사용되는방법이다. 개의방정식에서 인 ( 대각원소들이모두 0 이아닌 ) 경우를다루자. j j b j j b j j 여기서 j b j j j 현재반복단계
. 선형시스템 : GussSedel. 비선형시스템. 선형시스템 : GussSedel (/0) 반복법은초기근을가정한후에더좋은근의값을추정하는체계적인절차를이용한다. GS 방법은선형대수방정식을푸는반복법중에서 가장보편적으로사용되는방법이다. 개의방정식에서 인 ( 대각원소들이모두 0 이아닌 ) 경우를다루자. j j b j j b j j 여기서 j b j j j 현재반복단계
슬라이드 1
 장연립방정식을 풀기위한반복법. 선형시스템 : Guss-Sedel. 비선형시스템 . 선형시스템 : Guss-Sedel (/0) 반복법은초기근을가정한후에더좋은근의값을추정하는체계적인절차를이용한다. G-S 방법은선형대수방정식을푸는반복법중에서 가장보편적으로사용되는방법이다. 개의방정식에서 인 ( 대각원소들이모두 0 이아닌 ) 경우를다루자. j j b j b j j j
장연립방정식을 풀기위한반복법. 선형시스템 : Guss-Sedel. 비선형시스템 . 선형시스템 : Guss-Sedel (/0) 반복법은초기근을가정한후에더좋은근의값을추정하는체계적인절차를이용한다. G-S 방법은선형대수방정식을푸는반복법중에서 가장보편적으로사용되는방법이다. 개의방정식에서 인 ( 대각원소들이모두 0 이아닌 ) 경우를다루자. j j b j b j j j
특허청구의범위청구항 1 영상제공서버에서의실시간으로영상을제공하는방법에있어서, 클라이언트로부터매장의종류를포함하는검색어를수신하는단계 ; 수신된검색어에기초하여특정지역내에서상기매장의종류에해당하는적어도하나의매장을검색하고검색결과를상기클라이언트에전송하는단계 ; 상기클라이언트로부터발생
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0075000 (22) 출원일자 2008 년 07 월 31 일 심사청구일자 2008 년 07 월 31 일 (65) 공개번호 10-2010-0013469 (43) 공개일자 2010 년 02 월 10 일 (56)
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0075000 (22) 출원일자 2008 년 07 월 31 일 심사청구일자 2008 년 07 월 31 일 (65) 공개번호 10-2010-0013469 (43) 공개일자 2010 년 02 월 10 일 (56)
이발명을지원한국가연구개발사업 과제고유번호 NRF-2012M3C4A 부처명 미래창조과학부 연구관리전문기관 한국연구재단 연구사업명 차세대정보컴퓨팅기술개발사업 연구과제명 소셜및정보네트워크빅데이터마이닝소프트웨어원천기술개발 기여율 1/1 주관기관 서울대학교 연구기간
 (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2016-0147525 (43) 공개일자 2016년12월23일 (51) 국제특허분류 (Int. Cl.) H04L 12/24 (2006.01) (52) CPC 특허분류 H04L 41/12 (2013.01) H04L 41/142 (2013.01) (21) 출원번호 10-2015-0084387
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2016-0147525 (43) 공개일자 2016년12월23일 (51) 국제특허분류 (Int. Cl.) H04L 12/24 (2006.01) (52) CPC 특허분류 H04L 41/12 (2013.01) H04L 41/142 (2013.01) (21) 출원번호 10-2015-0084387
학습목차 2.1 다차원배열이란 차원배열의주소와값의참조
 - Part2- 제 2 장다차원배열이란무엇인가 학습목차 2.1 다차원배열이란 2. 2 2 차원배열의주소와값의참조 2.1 다차원배열이란 2.1 다차원배열이란 (1/14) 다차원배열 : 2 차원이상의배열을의미 1 차원배열과다차원배열의비교 1 차원배열 int array [12] 행 2 차원배열 int array [4][3] 행 열 3 차원배열 int array [2][2][3]
- Part2- 제 2 장다차원배열이란무엇인가 학습목차 2.1 다차원배열이란 2. 2 2 차원배열의주소와값의참조 2.1 다차원배열이란 2.1 다차원배열이란 (1/14) 다차원배열 : 2 차원이상의배열을의미 1 차원배열과다차원배열의비교 1 차원배열 int array [12] 행 2 차원배열 int array [4][3] 행 열 3 차원배열 int array [2][2][3]
온습도 판넬미터(JTH-05) 사양서V1.0
 사양서V1.0") 온습도 조절기 Model:JTH-05 1. 제품 사양. [제품 구분] JTH-05A(입력 전원 AC), JTH-05D(입력 전원 DC) [전원 사양] JTH-05A 입력 전압 출력 전원 소비 전력 JTH-05D AC 90~240V DC 10~36V 12Vdc / Max.170mA Max.2W [본체 사이즈] ~ 온/습도 범위(본체): 사용 [0 ~ 50, 85%RH
온습도 조절기 Model:JTH-05 1. 제품 사양. [제품 구분] JTH-05A(입력 전원 AC), JTH-05D(입력 전원 DC) [전원 사양] JTH-05A 입력 전압 출력 전원 소비 전력 JTH-05D AC 90~240V DC 10~36V 12Vdc / Max.170mA Max.2W [본체 사이즈] ~ 온/습도 범위(본체): 사용 [0 ~ 50, 85%RH
명세서청구범위청구항 1 일단이아래로경사지게형성되고타단의측면은제 1 링크 (11) 및제 2 링크 (12) 를갖는원형링크 (13) 의상기제 2 링크에연결되고상기원형링크를매개로회전가능한사용자의안착을위한좌석 (10); 일단이상기좌석의일단과상응하게아래로경사지게형성되고제 3 링크
 및제 2 링크 (12) 를갖는원형링크 (13) 의상기제 2 링크에연결되고상기원형링크를매개로회전가능한사용자의안착을위한좌석 (10); 일단이상기좌석의일단과상응하게아래로경사지게형성되고제 3 링크") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) A61G 5/14 (2006.01) A47C 7/62 (2006.01) (21) 출원번호 10-2014-0162951 (22) 출원일자 2014 년 11 월 20 일 심사청구일자 전체청구항수 : 총 6 항 2016 년 05 월 19 일 (11) 공개번호 10-2016-0060891
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) A61G 5/14 (2006.01) A47C 7/62 (2006.01) (21) 출원번호 10-2014-0162951 (22) 출원일자 2014 년 11 월 20 일 심사청구일자 전체청구항수 : 총 6 항 2016 년 05 월 19 일 (11) 공개번호 10-2016-0060891
특허청구의 범위 청구항 1 앵커(20)를 이용한 옹벽 시공에 사용되는 옹벽패널에 있어서, 단위패널형태의 판 형태로 구성되며, 내부 중앙부가 후방 하부를 향해 기울어지도록 돌출 형성되어, 전면이 오 목하게 들어가고 후면이 돌출된 결속부(11)를 형성하되, 이 결속부(11
를 이용한 옹벽 시공에 사용되는 옹벽패널에 있어서, 단위패널형태의 판 형태로 구성되며, 내부 중앙부가 후방 하부를 향해 기울어지도록 돌출 형성되어, 전면이 오 목하게 들어가고 후면이 돌출된 결속부(11)를 형성하되, 이 결속부(11") (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) E02D 29/02 (2006.01) E02D 17/20 (2006.01) E02B 3/14 (2006.01) (21) 출원번호 10-2010-0089517 (22) 출원일자 2010년09월13일 심사청구일자 (56) 선행기술조사문헌 JP2006037700 A* KR100920461
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) E02D 29/02 (2006.01) E02D 17/20 (2006.01) E02B 3/14 (2006.01) (21) 출원번호 10-2010-0089517 (22) 출원일자 2010년09월13일 심사청구일자 (56) 선행기술조사문헌 JP2006037700 A* KR100920461
(72) 발명자 김화용 서울특별시관악구봉천 2 동동아아파트 109 동 803 호 강병희 서울특별시관악구봉천 11 동 번지미림연립 305 호 - 2 -
 발명자 김화용 서울특별시관악구봉천 2 동동아아파트 109 동 803 호 강병희 서울특별시관악구봉천 11 동 번지미림연립 305 호 - 2 -") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2010년04월09일 (11) 등록번호 10-0951955 (24) 등록일자 2010년04월01일 (73) 특허권자 (51) Int. Cl. 재단법인서울대학교산학협력재단 C02F 1/72 (2006.01) C02F 11/06 (2006.01) 서울특별시관악구봉천7동산4의 2번지
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2010년04월09일 (11) 등록번호 10-0951955 (24) 등록일자 2010년04월01일 (73) 특허권자 (51) Int. Cl. 재단법인서울대학교산학협력재단 C02F 1/72 (2006.01) C02F 11/06 (2006.01) 서울특별시관악구봉천7동산4의 2번지
특허청구의범위청구항 1 투입된음식물을분쇄하는분쇄기 ; 상기분쇄된음식물을가열할수있는마그네트론 ; 및탈취작용을하는저온촉매필터를포함하는음식물처리기에있어서, 상기마그네트론이상기저온촉매필터를일정온도로가열할수있는것을특징으로하는, 청구항 2 제 1 항에있어서, 상기음식물처리기는상기
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) F26B 3/347 (2006.01) F23G 5/00 (2006.01) B09B 3/00 (2006.01) (21) 출원번호 10-2009-0104077 (22) 출원일자 2009 년 10 월 30 일 심사청구일자 (30) 우선권주장 없음 2020090010354 2009
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) F26B 3/347 (2006.01) F23G 5/00 (2006.01) B09B 3/00 (2006.01) (21) 출원번호 10-2009-0104077 (22) 출원일자 2009 년 10 월 30 일 심사청구일자 (30) 우선권주장 없음 2020090010354 2009
특허청구의 범위 청구항 1 삭제 청구항 2 단일 개의 운영체제를 갖는 클라이언트 단말에 있어서, 제1 운영체제와, 상기 제1 운영체제 하에서 사용되는 파일을 저장하는 메모리; 및 상기 메모리에 저장된 파일을 운영체제 제공장치로 전송하고 상기 메모리를 포맷하며, 상기 운
 (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) G06F 9/22 (2006.01) (21) 출원번호 10-2012-0020563 (22) 출원일자 2012년02월28일 심사청구일자 2012년02월28일 (65) 공개번호 10-2013-0098775 (43) 공개일자 2013년09월05일 (56) 선행기술조사문헌
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) G06F 9/22 (2006.01) (21) 출원번호 10-2012-0020563 (22) 출원일자 2012년02월28일 심사청구일자 2012년02월28일 (65) 공개번호 10-2013-0098775 (43) 공개일자 2013년09월05일 (56) 선행기술조사문헌
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년07월10일 (11) 등록번호 10-1418046 (24) 등록일자 2014년07월03일 (51) 국제특허분류 (Int. Cl.) H03K 5/156 (2006.01) H03K 7/08 (2006.01) (21) 출원번호 10-2012-0148658 (22) 출원일자 2012
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년07월10일 (11) 등록번호 10-1418046 (24) 등록일자 2014년07월03일 (51) 국제특허분류 (Int. Cl.) H03K 5/156 (2006.01) H03K 7/08 (2006.01) (21) 출원번호 10-2012-0148658 (22) 출원일자 2012
항은 발명의 상세한 설명에는 그 발명이 속하는 기술분야에서 통상의 지식을 가진 자 (이하 통상의 기술자 라고 한다)가 용이하게 실시할 수 있을 정도로 그 발명의 목적 구성 및 효과를 기재하여야 한다고 규정하고 있다. 이는 특허출원된 발명의 내용을 제 3자가 명세서만으로
가 용이하게 실시할 수 있을 정도로 그 발명의 목적 구성 및 효과를 기재하여야 한다고 규정하고 있다. 이는 특허출원된 발명의 내용을 제 3자가 명세서만으로") 대 법 원 제 2 부 판 결 사 건 2013후518 권리범위확인(특) 원고, 상고인 코오롱인더스트리 주식회사 소송대리인 변리사 경진영 외 2인 피고, 피상고인 토요보 가부시키가이샤(변경 전: 토요 보세키 가부시키가이샤) 소송대리인 변호사 박성수 외 4인 원 심 판 결 특허법원 2013. 1. 25. 선고 2012허6700 판결 판 결 선 고 2015. 9.
대 법 원 제 2 부 판 결 사 건 2013후518 권리범위확인(특) 원고, 상고인 코오롱인더스트리 주식회사 소송대리인 변리사 경진영 외 2인 피고, 피상고인 토요보 가부시키가이샤(변경 전: 토요 보세키 가부시키가이샤) 소송대리인 변호사 박성수 외 4인 원 심 판 결 특허법원 2013. 1. 25. 선고 2012허6700 판결 판 결 선 고 2015. 9.
37 동대문구 청량리8 추진위 청량리동 ,314 재개발 38 성북구 돈암6 추진위 돈암동 ,050 재개발 39 성북구 동소문2 조합 동소문2가 33 20,657 재개발 40 성북구 동선1 추진위 돈암동 ,235 재개발 41 성북구
 서울시재개발재건축구역현황 (2016.12월기준 ) 연번 자치구 구역명 시행단계 주소 면적 사업구분 1 종로구 무악2 착공 무악동 46 11,059 재개발 2 종로구 신영1 조합 신영동 158 15,669 재개발 3 종로구 옥인1 사업시행 옥인동 47 30,282 재개발 4 종로구 충신1 조합 충신동 1-1 9,602 재개발 5 종로구 이화1 구역지정 이화동
서울시재개발재건축구역현황 (2016.12월기준 ) 연번 자치구 구역명 시행단계 주소 면적 사업구분 1 종로구 무악2 착공 무악동 46 11,059 재개발 2 종로구 신영1 조합 신영동 158 15,669 재개발 3 종로구 옥인1 사업시행 옥인동 47 30,282 재개발 4 종로구 충신1 조합 충신동 1-1 9,602 재개발 5 종로구 이화1 구역지정 이화동
소성해석
 3 강유한요소법 3 강목차 3. 미분방정식의근사해법-Ritz법 3. 미분방정식의근사해법 가중오차법 3.3 유한요소법개념 3.4 편미분방정식의유한요소법 . CAD 전처리프로그램 (Preprocessor) DXF, STL 파일 입력데이타 유한요소솔버 (Finite Element Solver) 자연법칙지배방정식유한요소방정식파생변수의계산 질량보존법칙 연속방정식 뉴톤의운동법칙평형방정식대수방정식
3 강유한요소법 3 강목차 3. 미분방정식의근사해법-Ritz법 3. 미분방정식의근사해법 가중오차법 3.3 유한요소법개념 3.4 편미분방정식의유한요소법 . CAD 전처리프로그램 (Preprocessor) DXF, STL 파일 입력데이타 유한요소솔버 (Finite Element Solver) 자연법칙지배방정식유한요소방정식파생변수의계산 질량보존법칙 연속방정식 뉴톤의운동법칙평형방정식대수방정식
특허청구의범위청구항 1 복수개의파장대역중적어도하나이상의파장대역의영상인카메라영상을획득하는카메라부 ; 상기카메라영상으로부터배경영역을제거하여표적영역을추출하는전처리부 ; 상기표적영역에서특징파라미터를추출하는특징파라미터추출부 ; 상기특징파라미터를정보화한형상화데이터를생성하는형상화데
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 5/00 (2006.01) G06T 7/00 (2006.01) H04N 9/67 (2006.01) (21) 출원번호 10-2012-0013080 (22) 출원일자 2012 년 02 월 09 일 심사청구일자 (56) 선행기술조사문헌 JP2005286577
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 5/00 (2006.01) G06T 7/00 (2006.01) H04N 9/67 (2006.01) (21) 출원번호 10-2012-0013080 (22) 출원일자 2012 년 02 월 09 일 심사청구일자 (56) 선행기술조사문헌 JP2005286577
특허청구의 범위 청구항 1 복수의 FA(Frequency Allocation)를 사용하는 광대역 무선통신 시스템에서 프리앰블 의사 잡음(Pseudo Noise : PN) 코드 할당 방법에 있어서, 각 FA에 고유의 인덱스를 정의하는 과정과, 기준 FA 인덱스를 사용하는
를 사용하는 광대역 무선통신 시스템에서 프리앰블 의사 잡음(Pseudo Noise : PN) 코드 할당 방법에 있어서, 각 FA에 고유의 인덱스를 정의하는 과정과, 기준 FA 인덱스를 사용하는") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2011년03월02일 (11) 등록번호 10-1017970 (24) 등록일자 2011년02월21일 (73) 특허권자 (51) Int. Cl. 삼성전자주식회사 H04L 9/20 (2006.01) H04L 9/28 (2006.01) 경기도 수원시 영통구 매탄동 416 (21) 출원번호
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2011년03월02일 (11) 등록번호 10-1017970 (24) 등록일자 2011년02월21일 (73) 특허권자 (51) Int. Cl. 삼성전자주식회사 H04L 9/20 (2006.01) H04L 9/28 (2006.01) 경기도 수원시 영통구 매탄동 416 (21) 출원번호
(72) 발명자 정종수 서울특별시 서대문구 모래내로 319, 101동 405호 (홍은동, 진흥아파트) 김정환 서울특별시 구로구 구로동로21길 7 (구로동) - 2 -
 발명자 정종수 서울특별시 서대문구 모래내로 319, 101동 405호 (홍은동, 진흥아파트) 김정환 서울특별시 구로구 구로동로21길 7 (구로동) - 2 -") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B01J 23/34 (2006.01) B01J 37/02 (2006.01) B01J 37/08 (2006.01) B01D 53/86 (2006.01) (21) 출원번호 10-2010-0098306 (22) 출원일자 2010년10월08일 심사청구일자 2010년10월08일
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B01J 23/34 (2006.01) B01J 37/02 (2006.01) B01J 37/08 (2006.01) B01D 53/86 (2006.01) (21) 출원번호 10-2010-0098306 (22) 출원일자 2010년10월08일 심사청구일자 2010년10월08일
Sequences with Low Correlation
 레일리페이딩채널에서의 DPC 부호의성능분석 * 김준성, * 신민호, * 송홍엽 00 년 7 월 1 일 * 연세대학교전기전자공학과부호및정보이론연구실 발표순서 서론 복호화방법 R-BP 알고리즘 UMP-BP 알고리즘 Normalied-BP 알고리즘 무상관레일리페이딩채널에서의표준화인수 모의실험결과및고찰 결론 Codig ad Iformatio Theory ab /15
레일리페이딩채널에서의 DPC 부호의성능분석 * 김준성, * 신민호, * 송홍엽 00 년 7 월 1 일 * 연세대학교전기전자공학과부호및정보이론연구실 발표순서 서론 복호화방법 R-BP 알고리즘 UMP-BP 알고리즘 Normalied-BP 알고리즘 무상관레일리페이딩채널에서의표준화인수 모의실험결과및고찰 결론 Codig ad Iformatio Theory ab /15
특허청구의 범위 청구항 1 맨홀 일부분에 관통되게 결합되는 맨홀결합구와; 상기 맨홀결합구의 전방에 연통되게 형성되어 토양속에 묻히게 설치되고, 외주면에는 지하수가 유입될 수 있는 다수의 통공이 관통 형성된 지하수유입구와; 상기 맨홀결합구의 후방에 연통되고 수직으로 세워
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) G01F 23/02 (2006.01) G01F 23/00 (2006.01) (21) 출원번호 10-2007-0096769 (22) 출원일자 2007년09월21일 심사청구일자 전체 청구항 수 : 총 5 항 (54) 지하수위 관측장치 2007년09월21일 (11) 공개번호 10-2009-0031004
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) G01F 23/02 (2006.01) G01F 23/00 (2006.01) (21) 출원번호 10-2007-0096769 (22) 출원일자 2007년09월21일 심사청구일자 전체 청구항 수 : 총 5 항 (54) 지하수위 관측장치 2007년09월21일 (11) 공개번호 10-2009-0031004
브와 IP 인터콤의연결만으로시스템이간편하고용이하게확장될수있어확장성이증대되고, 특히선박에적용되어종래의 PA/GA 시스템구축에필요한많은전선에대한비용의절감과전선무게절감에의한선박중량감소로유류비의절감이도모될수있는기술적특징을갖는다. 본발명에따른이더넷기반 PA/GA 용인터콤스테이션
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04L 29/06 (2006.01) H04L 12/10 (2006.01) H04L 29/12 (2006.01) (52) CPC 특허분류 H04L 65/1013 (2013.01) H04L 12/10 (2013.01) (21) 출원번호 10-2016-0011139
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04L 29/06 (2006.01) H04L 12/10 (2006.01) H04L 29/12 (2006.01) (52) CPC 특허분류 H04L 65/1013 (2013.01) H04L 12/10 (2013.01) (21) 출원번호 10-2016-0011139
OCW_C언어 기초
 초보프로그래머를위한 C 언어기초 4 장 : 연산자 2012 년 이은주 학습목표 수식의개념과연산자및피연산자에대한학습 C 의알아보기 연산자의우선순위와결합방향에대하여알아보기 2 목차 연산자의기본개념 수식 연산자와피연산자 산술연산자 / 증감연산자 관계연산자 / 논리연산자 비트연산자 / 대입연산자연산자의우선순위와결합방향 조건연산자 / 형변환연산자 연산자의우선순위 연산자의결합방향
초보프로그래머를위한 C 언어기초 4 장 : 연산자 2012 년 이은주 학습목표 수식의개념과연산자및피연산자에대한학습 C 의알아보기 연산자의우선순위와결합방향에대하여알아보기 2 목차 연산자의기본개념 수식 연산자와피연산자 산술연산자 / 증감연산자 관계연산자 / 논리연산자 비트연산자 / 대입연산자연산자의우선순위와결합방향 조건연산자 / 형변환연산자 연산자의우선순위 연산자의결합방향
공개특허 (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 (43) 공개일자 2013년09월25일 (51) 국제특허분류 (Int. Cl.) B65D 25/14 ( ) C23
 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 (43) 공개일자 2013년09월25일 (51) 국제특허분류 (Int. Cl.) B65D 25/14 ( ) C23") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2013-0104189 (43) 공개일자 2013년09월25일 (51) 국제특허분류 (Int. Cl.) B65D 25/14 (2006.01) C23C 16/26 (2006.01) C08J 7/00 (2006.01) (21) 출원번호 10-2012-0025472 (22) 출원일자
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2013-0104189 (43) 공개일자 2013년09월25일 (51) 국제특허분류 (Int. Cl.) B65D 25/14 (2006.01) C23C 16/26 (2006.01) C08J 7/00 (2006.01) (21) 출원번호 10-2012-0025472 (22) 출원일자

13. 다차원척도법 (MultiDimensional Scaling) 13.1 개념및목적 다차원척도법 (mds) 는다차원관측값또는개체들간의거리 (distance) 또는비유사성 (dissimilarity) 을이용하여개체들을원래의차원보다낮은차원 ( 보통 2차원 ) 의공간상에
 13.1 개념및목적 다차원척도법 (mds) 는다차원관측값또는개체들간의거리 (distance) 또는비유사성 (dissimilarity) 을이용하여개체들을원래의차원보다낮은차원 ( 보통 2차원 ) 의공간상에") 13. 다차원척도법 (MultiDimensional Scaling) 13.1 개념및목적 다차원척도법 (mds) 는다차원관측값또는개체들간의거리 (distance) 또는비유사성 (dissimilarity) 을이용하여개체들을원래의차원보다낮은차원 ( 보통 2차원 ) 의공간상에위치시켜 (spatial configuration) 개체들사이의구조또는관계를쉽게파악하고자하는데목적이있다.
13. 다차원척도법 (MultiDimensional Scaling) 13.1 개념및목적 다차원척도법 (mds) 는다차원관측값또는개체들간의거리 (distance) 또는비유사성 (dissimilarity) 을이용하여개체들을원래의차원보다낮은차원 ( 보통 2차원 ) 의공간상에위치시켜 (spatial configuration) 개체들사이의구조또는관계를쉽게파악하고자하는데목적이있다.
특허청구의 범위 청구항 1 터치스크린 방식의 디스플레이(106) 상에 가상의 조이스틱(108a, 108b)을 좌우측에 하나씩 표시하고, 야구 게 임의 이용자가 상기 조이스틱(108a, 108b)을 조정하여 상기 야구 게임을 진행하도록 하는 방법으로서, 상기 이용자가 사
 상에 가상의 조이스틱(108a, 108b)을 좌우측에 하나씩 표시하고, 야구 게 임의 이용자가 상기 조이스틱(108a, 108b)을 조정하여 상기 야구 게임을 진행하도록 하는 방법으로서, 상기 이용자가 사") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) A63F 13/2145 (2014.01) A63F 13/20 (2014.01) (21) 출원번호 10-2012-0094000 (22) 출원일자 2012년08월28일 심사청구일자 (56) 선행기술조사문헌 JP2002301267 A* JP2006129942 A* 2012년08월28일
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) A63F 13/2145 (2014.01) A63F 13/20 (2014.01) (21) 출원번호 10-2012-0094000 (22) 출원일자 2012년08월28일 심사청구일자 (56) 선행기술조사문헌 JP2002301267 A* JP2006129942 A* 2012년08월28일
특허청구의범위청구항 1 환경미화에사용되는청소차량의배기통의열을이용해가열매체를가열시키는상기배기통을감싸도록형성되는히팅관 ; 상기청소차량수거함에발생되는오수의결빙을방지할수있도록상기히팅관을통해가열된공기로이루어진가열매체의열을상기수거함으로전달하는가열부 ; 상기가열매체가상기히팅관에서가
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) B65F 3/02 (2006.01) B65F 3/00 (2006.01) B65F 7/00 (2006.01) (21) 출원번호 10-2009-0023273 (22) 출원일자 2009 년 03 월 18 일 심사청구일자 (56) 선행기술조사문헌 KR100172217 B1* KR100284275
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) B65F 3/02 (2006.01) B65F 3/00 (2006.01) B65F 7/00 (2006.01) (21) 출원번호 10-2009-0023273 (22) 출원일자 2009 년 03 월 18 일 심사청구일자 (56) 선행기술조사문헌 KR100172217 B1* KR100284275
슬라이드 1
 Pairwise Tool & Pairwise Test NuSRS 200511305 김성규 200511306 김성훈 200614164 김효석 200611124 유성배 200518036 곡진화 2 PICT Pairwise Tool - PICT Microsoft 의 Command-line 기반의 Free Software www.pairwise.org 에서다운로드후설치
Pairwise Tool & Pairwise Test NuSRS 200511305 김성규 200511306 김성훈 200614164 김효석 200611124 유성배 200518036 곡진화 2 PICT Pairwise Tool - PICT Microsoft 의 Command-line 기반의 Free Software www.pairwise.org 에서다운로드후설치
(72) 발명자 오인환 서울 노원구 중계로 195, 101동 803호 (중계동, 신 안동진아파트) 서혜리 서울 종로구 평창14길 23, (평창동) 한훈식 서울 강남구 언주로71길 25-5, 301호 (역삼동, 영 훈하이츠) 이 발명을 지원한 국가연구개발사업 과제고유번호
 발명자 오인환 서울 노원구 중계로 195, 101동 803호 (중계동, 신 안동진아파트) 서혜리 서울 종로구 평창14길 23, (평창동) 한훈식 서울 강남구 언주로71길 25-5, 301호 (역삼동, 영 훈하이츠) 이 발명을 지원한 국가연구개발사업 과제고유번호") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2014년04월14일 (11) 등록번호 10-1384704 (24) 등록일자 2014년04월07일 (51) 국제특허분류(Int. Cl.) F16L 9/18 (2006.01) F17D 1/00 (2006.01) F16L 3/00 (2006.01) (21) 출원번호 10-2012-0113933
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2014년04월14일 (11) 등록번호 10-1384704 (24) 등록일자 2014년04월07일 (51) 국제특허분류(Int. Cl.) F16L 9/18 (2006.01) F17D 1/00 (2006.01) F16L 3/00 (2006.01) (21) 출원번호 10-2012-0113933
(72) 발명자 신일훈 경기 수원시 영통구 영통동 황골마을1단지아파트 151동 702호 나세욱 서울 용산구 용산동2가 18-5 김효준 경기 용인시 기흥구 상갈동 금화마을주공아파트 407동 1204호 윤송호 경기 용인시 수지구 풍덕천2동 삼성5차아파트 523-702 신동
 발명자 신일훈 경기 수원시 영통구 영통동 황골마을1단지아파트 151동 702호 나세욱 서울 용산구 용산동2가 18-5 김효준 경기 용인시 기흥구 상갈동 금화마을주공아파트 407동 1204호 윤송호 경기 용인시 수지구 풍덕천2동 삼성5차아파트 523-702 신동") (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G11C 16/10 (2006.01) G11C 16/34 (2006.01) (21) 출원번호 10-2006-0112411 (22) 출원일자 2006년11월14일 심사청구일자 2006년11월14일 (65) 공개번호 10-2008-0043633 (43) 공개일자 2008년05월19일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G11C 16/10 (2006.01) G11C 16/34 (2006.01) (21) 출원번호 10-2006-0112411 (22) 출원일자 2006년11월14일 심사청구일자 2006년11월14일 (65) 공개번호 10-2008-0043633 (43) 공개일자 2008년05월19일
특허청구의범위청구항 1 네트워크를통해외부음악메타데이터제공자로부터음악메타데이터가수신되면상기음악메타데이터를임시음악메타데이터에저장하는단계와, 상기임시저장되는음악메타데이터를파싱처리하여메타데이터요소를분리하는단계와, 상기파싱처리된음악메타데이터중주요필드정보를전처리정제하는단계와, 상
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년10월15일 (11) 등록번호 10-1449482 (24) 등록일자 2014년10월02일 (51) 국제특허분류 (Int. Cl.) G06Q 50/10 (2012.01) H04N 21/233 (2011.01) (21) 출원번호 10-2007-0117576 (22) 출원일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년10월15일 (11) 등록번호 10-1449482 (24) 등록일자 2014년10월02일 (51) 국제특허분류 (Int. Cl.) G06Q 50/10 (2012.01) H04N 21/233 (2011.01) (21) 출원번호 10-2007-0117576 (22) 출원일자
(72) 발명자 배홍민 울산광역시 동구 전하로 34 (전하동) 윤규상 울산광역시 동구 문현6길 19, 102동 304호 ( 방어동, 문현아이파크) 배대원 울산광역시 남구 월평로 253, 101동 409호 ( 삼산동, 삼산현대아파트) - 2 -
 발명자 배홍민 울산광역시 동구 전하로 34 (전하동) 윤규상 울산광역시 동구 문현6길 19, 102동 304호 ( 방어동, 문현아이파크) 배대원 울산광역시 남구 월평로 253, 101동 409호 ( 삼산동, 삼산현대아파트) - 2 -") (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2013-0082991 (43) 공개일자 2013년07월22일 (51) 국제특허분류(Int. Cl.) G06Q 10/06 (2012.01) (21) 출원번호 10-2011-0142753 (22) 출원일자 2011년12월26일 심사청구일자 없음 전체 청구항 수 : 총 1 항 (54)
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2013-0082991 (43) 공개일자 2013년07월22일 (51) 국제특허분류(Int. Cl.) G06Q 10/06 (2012.01) (21) 출원번호 10-2011-0142753 (22) 출원일자 2011년12월26일 심사청구일자 없음 전체 청구항 수 : 총 1 항 (54)
Microsoft Word - Lab.4
 Lab. 1. I-V Lab. 4. 연산증폭기 Characterist 비 tics of a Dio 비교기 ode 응용 회로 1. 실험목표 연산증폭기를이용한비교기비교기응용회로를이해 응용회로를구성, 측정및평가해서연산증폭기 2. 실험회로 A. 연산증폭기비교기응용회로 (a) 기본비교기 (b) 출력제한 비교기 (c) 슈미트트리거 (d) 포화반파정류회로그림 4.1. 연산증폭기비교기응용회로
Lab. 1. I-V Lab. 4. 연산증폭기 Characterist 비 tics of a Dio 비교기 ode 응용 회로 1. 실험목표 연산증폭기를이용한비교기비교기응용회로를이해 응용회로를구성, 측정및평가해서연산증폭기 2. 실험회로 A. 연산증폭기비교기응용회로 (a) 기본비교기 (b) 출력제한 비교기 (c) 슈미트트리거 (d) 포화반파정류회로그림 4.1. 연산증폭기비교기응용회로
등록특허 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06Q 30/06A0 ( ) (21) 출원번호 (22) 출원일자 2009 년 08 월 19 일
 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06Q 30/06A0 ( ) (21) 출원번호 (22) 출원일자 2009 년 08 월 19 일") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06Q 30/06A0 (2012.01) (21) 출원번호 10-2009-0076942 (22) 출원일자 2009 년 08 월 19 일 심사청구일자 2009 년 08 월 19 일 (65) 공개번호 10-2011-0019289 (43) 공개일자 2011 년
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06Q 30/06A0 (2012.01) (21) 출원번호 10-2009-0076942 (22) 출원일자 2009 년 08 월 19 일 심사청구일자 2009 년 08 월 19 일 (65) 공개번호 10-2011-0019289 (43) 공개일자 2011 년
특허청구의 범위 청구항 1 고유한 USB-ID를 가지며, 강제 포맷이나 프로그램 삭제가 불가능한 CD영역과 데이터의 읽기, 쓰기가 가능한 일 반영역으로 분할되어 있고 상기 CD영역에 임산부 도우미 프로그램이 임산부 PC(200)에 연결되면 자동 설치 및 실행되게 탑재된
에 연결되면 자동 설치 및 실행되게 탑재된") (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2010-0042502 (43) 공개일자 2010년04월26일 (51) Int. Cl. G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0101675 (22) 출원일자 2008년10월16일 심사청구일자 전체 청구항 수 : 총 13 항 2008년10월16일 (71)
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2010-0042502 (43) 공개일자 2010년04월26일 (51) Int. Cl. G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0101675 (22) 출원일자 2008년10월16일 심사청구일자 전체 청구항 수 : 총 13 항 2008년10월16일 (71)
Chap 6: Graphs
 그래프표현법 인접행렬 (Adjacency Matrix) 인접리스트 (Adjacency List) 인접다중리스트 (Adjacency Multilist) 6 장. 그래프 (Page ) 인접행렬 (Adjacency Matrix) n 개의 vertex 를갖는그래프 G 의인접행렬의구성 A[n][n] (u, v) E(G) 이면, A[u][v] = Otherwise, A[u][v]
그래프표현법 인접행렬 (Adjacency Matrix) 인접리스트 (Adjacency List) 인접다중리스트 (Adjacency Multilist) 6 장. 그래프 (Page ) 인접행렬 (Adjacency Matrix) n 개의 vertex 를갖는그래프 G 의인접행렬의구성 A[n][n] (u, v) E(G) 이면, A[u][v] = Otherwise, A[u][v]
특허청구의 범위 청구항 1 소스 컴퓨팅 디바이스로부터 복수의 컴퓨팅 디바이스들 중 적어도 하나의 컴퓨팅 디바이스로의 무선 액세스 포 인트를 통한 데이터 송신들에 대한 (i) 현재 데이터 레이트 및 (ii) 최고 데이터 레이트를 구축하는 단계; 상기 복수의 컴퓨팅 디바이
 현재 데이터 레이트 및 (ii) 최고 데이터 레이트를 구축하는 단계; 상기 복수의 컴퓨팅 디바이") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2013년11월27일 (11) 등록번호 10-1333908 (24) 등록일자 2013년11월21일 (51) 국제특허분류(Int. Cl.) H04W 28/10 (2009.01) H04W 28/22 (2009.01) (21) 출원번호 10-2011-7031262 (22) 출원일자(국제)
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2013년11월27일 (11) 등록번호 10-1333908 (24) 등록일자 2013년11월21일 (51) 국제특허분류(Int. Cl.) H04W 28/10 (2009.01) H04W 28/22 (2009.01) (21) 출원번호 10-2011-7031262 (22) 출원일자(국제)
Python과 함께 배우는 신호 해석 제 5 강. 복소수 연산 및 Python을 이용한 복소수 연산 (제 2 장. 복소수 기초)
") 제 5 강. 복소수연산및 을이용한복소수연산 ( 제 2 장. 복소수기초 ) 한림대학교전자공학과 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 1 배울내용 복소수의기본개념복소수의표현오일러 (Euler) 공식복소수의대수연산 1의 N 승근 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 2 복소수의 4 칙연산 복소수의덧셈과뺄셈에는직각좌표계표현을사용하고,
제 5 강. 복소수연산및 을이용한복소수연산 ( 제 2 장. 복소수기초 ) 한림대학교전자공학과 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 1 배울내용 복소수의기본개념복소수의표현오일러 (Euler) 공식복소수의대수연산 1의 N 승근 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 2 복소수의 4 칙연산 복소수의덧셈과뺄셈에는직각좌표계표현을사용하고,
도 3 은 본 발명에 따른 제거수단을 보인 사시도 도 4 는 본 발명에 따른 제거수단의 해파필터와 카본필터의 구성을 보인 개략단면도 <도면의 주요부분에 대한 부호의 설명> (1) : 케이싱 (1a) : 천연음이온 도료 (2) : 제거수단 (3) : UV살균장치 (4)
 : 케이싱 (1a) : 천연음이온 도료 (2) : 제거수단 (3) : UV살균장치 (4)") (51) Int. Cl. 7 A61L 9/20 (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2005년05월25일 10-0491080 2005년05월13일 (21) 출원번호 10-2004-0022173 (65) 공개번호 10-2004-0037034 (22) 출원일자 2004년03월31일 (43)
(51) Int. Cl. 7 A61L 9/20 (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2005년05월25일 10-0491080 2005년05월13일 (21) 출원번호 10-2004-0022173 (65) 공개번호 10-2004-0037034 (22) 출원일자 2004년03월31일 (43)
(72) 발명자 한상욱 서울특별시 노원구 공릉2동 81 태강아파트 1014동 201호 김진관 경기도 고양시 일산동구 마두동 강촌마을 2단지 한 신아파트 216-402 - 2 -
 발명자 한상욱 서울특별시 노원구 공릉2동 81 태강아파트 1014동 201호 김진관 경기도 고양시 일산동구 마두동 강촌마을 2단지 한 신아파트 216-402 - 2 -") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) E03B 3/03 (2006.01) E03F 1/00 (2006.01) C02F 1/00 (2006.01) (21) 출원번호 10-2011-0136139 (22) 출원일자 2011년12월16일 심사청구일자 (56) 선행기술조사문헌 KR100795918 B1* KR101036279
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) E03B 3/03 (2006.01) E03F 1/00 (2006.01) C02F 1/00 (2006.01) (21) 출원번호 10-2011-0136139 (22) 출원일자 2011년12월16일 심사청구일자 (56) 선행기술조사문헌 KR100795918 B1* KR101036279
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론
 이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관
 2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관 2015 개정교육과정에따른정보과평가기준개발연구 연구협력진 머리말 연구요약 차례 Ⅰ 서론 1 Ⅱ 평가준거성취기준, 평가기준, 성취수준, 예시평가도구개발방향 7 Ⅲ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의개발 25 Ⅳ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의활용방안
2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관 2015 개정교육과정에따른정보과평가기준개발연구 연구협력진 머리말 연구요약 차례 Ⅰ 서론 1 Ⅱ 평가준거성취기준, 평가기준, 성취수준, 예시평가도구개발방향 7 Ⅲ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의개발 25 Ⅳ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의활용방안
(72) 발명자 김준기 경기 군포시 광정동 한양목련아파트 1226동 805호 유세훈 인천광역시 연수구 송도동 성지리벨루스 110동 50 1호 방정환 인천 연수구 연수동 578-1 고용호 인천광역시 연수구 해송로30번길 송도 웰카운티 4 단지 20 (송도동) 407동 4
 발명자 김준기 경기 군포시 광정동 한양목련아파트 1226동 805호 유세훈 인천광역시 연수구 송도동 성지리벨루스 110동 50 1호 방정환 인천 연수구 연수동 578-1 고용호 인천광역시 연수구 해송로30번길 송도 웰카운티 4 단지 20 (송도동) 407동 4") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H05K 3/34 (2006.01) B23K 1/19 (2006.01) (21) 출원번호 10-2012-0091105 (22) 출원일자 2012년08월21일 심사청구일자 (56) 선행기술조사문헌 JP2004172398 A JP2004255426 A KR1020080083127
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H05K 3/34 (2006.01) B23K 1/19 (2006.01) (21) 출원번호 10-2012-0091105 (22) 출원일자 2012년08월21일 심사청구일자 (56) 선행기술조사문헌 JP2004172398 A JP2004255426 A KR1020080083127
특허청구의범위청구항 1 친환경농축산물의산출량정보를포함하는소정의친환경농축산물정보를입력받아저장하는정보입력단계 ; 상기입력된친환경농축산물의산출량정보에기초하여상기친환경농축산물에고유하게설정되는고유코드가발급되도록제어하고, 상기고유코드와연계하여상기소정의친환경농축산물정보를저장하는고유
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) G06Q 10/00H0 (2006.01) (21) 출원번호 10-2006-0090196 (22) 출원일자 2006 년 09 월 18 일 심사청구일자 전체청구항수 : 총 11 항 2006 년 09 월 18 일 (54) 친환경농축산물혼입방지관리방법 (11) 공개번호 10-2008-0025562
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) G06Q 10/00H0 (2006.01) (21) 출원번호 10-2006-0090196 (22) 출원일자 2006 년 09 월 18 일 심사청구일자 전체청구항수 : 총 11 항 2006 년 09 월 18 일 (54) 친환경농축산물혼입방지관리방법 (11) 공개번호 10-2008-0025562
2002년 2학기 자료구조
 자료구조 (Data Structures) Chapter 1 Basic Concepts Overview : Data (1) Data vs Information (2) Data Linear list( 선형리스트 ) - Sequential list : - Linked list : Nonlinear list( 비선형리스트 ) - Tree : - Graph : (3)
자료구조 (Data Structures) Chapter 1 Basic Concepts Overview : Data (1) Data vs Information (2) Data Linear list( 선형리스트 ) - Sequential list : - Linked list : Nonlinear list( 비선형리스트 ) - Tree : - Graph : (3)
Microsoft PowerPoint - evaluation(창원대)
") Evaluation 헤렌휘트니스파크한경진 ATC Contents 1. Shoulder 2. Elbow 3. Knee 4. Ankle 1 Shoulder Neer Hawkin s Empty can Speed O brien Shoulder anatomy 2 Neer Test Hawkin s test 3 Empty can test Speed Test 4 O Brien
Evaluation 헤렌휘트니스파크한경진 ATC Contents 1. Shoulder 2. Elbow 3. Knee 4. Ankle 1 Shoulder Neer Hawkin s Empty can Speed O brien Shoulder anatomy 2 Neer Test Hawkin s test 3 Empty can test Speed Test 4 O Brien

(52) CPC 특허분류 H03H 7/383 ( ) H05H 1/46 ( ) H05H 2001/4682 ( ) - 2 -
 CPC 특허분류 H03H 7/383 ( ) H05H 1/46 ( ) H05H 2001/4682 ( ) - 2 -") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H01J 37/32 (2006.01) H03H 7/38 (2006.01) H05H 1/46 (2006.01) (52) CPC 특허분류 H01J 37/32183 (2013.01) H01J 37/3299 (2013.01) (21) 출원번호 10-2015-0104214
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H01J 37/32 (2006.01) H03H 7/38 (2006.01) H05H 1/46 (2006.01) (52) CPC 특허분류 H01J 37/32183 (2013.01) H01J 37/3299 (2013.01) (21) 출원번호 10-2015-0104214
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
(72) 발명자 배영택 서울동작구사당 1 동 번지 이정우 서울관악구봉천 7 동산 4-2 교수아파트 122A
 발명자 배영택 서울동작구사당 1 동 번지 이정우 서울관악구봉천 7 동산 4-2 교수아파트 122A") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2008-0070908 (43) 공개일자 2008년08월01일 (51) Int. Cl. H04B 7/04 (2006.01) H04B 7/02 (2006.01) H04L 1/02 (2006.01) (21) 출원번호 10-2007-0008774 (22) 출원일자 2007 년 01
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2008-0070908 (43) 공개일자 2008년08월01일 (51) Int. Cl. H04B 7/04 (2006.01) H04B 7/02 (2006.01) H04L 1/02 (2006.01) (21) 출원번호 10-2007-0008774 (22) 출원일자 2007 년 01
2008101003530.hwp
 (P)180.120-W(B07B 1/20) 특 허 심 판 원 제 심 10 부 결 심 판 번 호 2008원3530 사 건 의 표 시 2007년 특허출원 제96606 호 매립 폐기물 및 건축 폐기물 분쇄 청 구 인 백운석 분리 처리장치 의 거절결정불복 인천 서구 가좌동 대리인 변리사 김은구 4-2 범양아파트 105-1105 서울 강남구 역삼동 647-13 동궁빌딩
(P)180.120-W(B07B 1/20) 특 허 심 판 원 제 심 10 부 결 심 판 번 호 2008원3530 사 건 의 표 시 2007년 특허출원 제96606 호 매립 폐기물 및 건축 폐기물 분쇄 청 구 인 백운석 분리 처리장치 의 거절결정불복 인천 서구 가좌동 대리인 변리사 김은구 4-2 범양아파트 105-1105 서울 강남구 역삼동 647-13 동궁빌딩
(71) 출원인 나혜원 대구 달서구 도원동 1438 대곡사계절타운 305-1502 나혜리 대구 달서구 도원동 1438 대곡사계절타운 305-1502 (72) 발명자 나혜원 대구 달서구 도원동 1438 대곡사계절타운 305-1502 나혜리 대구 달서구 도원동 1438 대
 출원인 나혜원 대구 달서구 도원동 1438 대곡사계절타운 305-1502 나혜리 대구 달서구 도원동 1438 대곡사계절타운 305-1502 (72) 발명자 나혜원 대구 달서구 도원동 1438 대곡사계절타운 305-1502 나혜리 대구 달서구 도원동 1438 대") (51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) E02D 17/20 (2006.01) E02B 3/12 (2006.01) E02D 3/10 (2006.01) (21) 출원번호 10-2008-0131302 (22) 출원일자 2008년12월22일 심사청구일자 전체 청구항 수 : 총 4 항 (54) 제직형 지오셀 2008년12월22일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) E02D 17/20 (2006.01) E02B 3/12 (2006.01) E02D 3/10 (2006.01) (21) 출원번호 10-2008-0131302 (22) 출원일자 2008년12월22일 심사청구일자 전체 청구항 수 : 총 4 항 (54) 제직형 지오셀 2008년12월22일
임상검사를위한안구의움직임을검사함에있어외부에서자기장이형성되고, 이것을유도전류로측정하여안구의움직임에따른회전각도가그대로유도되는전압의크기로측정하므로, 복잡한신호의보정없이피검자의안구운동을편리하게검사할수있으며, 피검자가눈을감거나안구를가리는상황에서도안구의움직임을정확하게측정할수있다.
 (51) Int. Cl. A61B 3/113 (2006.01) (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006 년 09 월 25 일 10-0627929 2006 년 09 월 18 일 (21) 출원번호 10-2004-0032297 (65) 공개번호 10-2005-0107105 (22)
(51) Int. Cl. A61B 3/113 (2006.01) (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006 년 09 월 25 일 10-0627929 2006 년 09 월 18 일 (21) 출원번호 10-2004-0032297 (65) 공개번호 10-2005-0107105 (22)
특허청구의범위청구항 1 청소차량의적재함에적재되는쓰레기로부터발생되는오수를처리하는오수탱크에있어서, 상기오수탱크내의오수결빙을방지하도록오수탱크를가열하는제1 가열부 ; 상기적재함과상기오수탱크를연결하는오수관내의오수결빙을방지하도록상기오수관을가열하는제2 가열부 ; 상기오수탱크로유입되
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) B65F 3/02 (2006.01) B65F 3/00 (2006.01) B65F 7/00 (2006.01) (21) 출원번호 10-2009-0023275 (22) 출원일자 2009 년 03 월 18 일 심사청구일자 (56) 선행기술조사문헌 KR100157834 B1* KR100172217
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) B65F 3/02 (2006.01) B65F 3/00 (2006.01) B65F 7/00 (2006.01) (21) 출원번호 10-2009-0023275 (22) 출원일자 2009 년 03 월 18 일 심사청구일자 (56) 선행기술조사문헌 KR100157834 B1* KR100172217
특허청구의범위청구항 1 화재감시시스템에있어서, 상용전원 (AC 200V) 과수소전지나리듐이온배터리를예비전원으로함께사용하는전원부 (1) 와 ; 유선감지기 (7) 의경우저항을거쳐온 DC 24V 전압및전류를이용하여포토커플러 PC-1의출력 LOW 또는 HIGH의변화로단선유무를
 과수소전지나리듐이온배터리를예비전원으로함께사용하는전원부 (1) 와 ; 유선감지기 (7) 의경우저항을거쳐온 DC 24V 전압및전류를이용하여포토커플러 PC-1의출력 LOW 또는 HIGH의변화로단선유무를") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2010년03월23일 (11) 등록번호 10-0949176 (24) 등록일자 2010년03월16일 (51) Int. Cl. G08B 25/00 (2006.01) G08B 25/10 (2006.01) G08B 17/06 (2006.01) (21) 출원번호 10-2008-0058586
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2010년03월23일 (11) 등록번호 10-0949176 (24) 등록일자 2010년03월16일 (51) Int. Cl. G08B 25/00 (2006.01) G08B 25/10 (2006.01) G08B 17/06 (2006.01) (21) 출원번호 10-2008-0058586
PowerPoint 프레젠테이션
 11 곡선과곡면 01 Spline 곡선 02 Spline 곡면 03 Subdivision 곡면 C n 연속성 C 0 연속성 C 1 연속성 2 C 2 연속성 01 Spline 곡선 1. Cardinal Spline Curve 2. Hermite Spline Curve 3. Bezier Spline Curve 4. Catmull-Rom Spline Curve 5.
11 곡선과곡면 01 Spline 곡선 02 Spline 곡면 03 Subdivision 곡면 C n 연속성 C 0 연속성 C 1 연속성 2 C 2 연속성 01 Spline 곡선 1. Cardinal Spline Curve 2. Hermite Spline Curve 3. Bezier Spline Curve 4. Catmull-Rom Spline Curve 5.
특허청구의 범위 청구항 1 몸체(110)의 일측에는 테스트의 필요성에 따라 여타한 디젤 자동차(100)에서 분리시킨 상태의 분리형 커먼레일 인젝트(110)를 고정할 수 있는 분리형 인젝터 고정부(20)가 구비되고, 그 고정부(20)의 하측에는 분리형 커먼 레일 인젝터(
의 일측에는 테스트의 필요성에 따라 여타한 디젤 자동차(100)에서 분리시킨 상태의 분리형 커먼레일 인젝트(110)를 고정할 수 있는 분리형 인젝터 고정부(20)가 구비되고, 그 고정부(20)의 하측에는 분리형 커먼 레일 인젝터(") (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2010-0038259 (43) 공개일자 2010년04월14일 (51) Int. Cl. G01M 15/09 (2006.01) G01M 15/00 (2006.01) (21) 출원번호 10-2008-0097443 (22) 출원일자 2008년10월04일 심사청구일자 전체 청구항 수 :
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2010-0038259 (43) 공개일자 2010년04월14일 (51) Int. Cl. G01M 15/09 (2006.01) G01M 15/00 (2006.01) (21) 출원번호 10-2008-0097443 (22) 출원일자 2008년10월04일 심사청구일자 전체 청구항 수 :
USC HIPAA AUTHORIZATION FOR
 연구 목적의 건강정보 사용을 위한 USC HIPAA 승인 1. 본 양식의 목적: 건강보험 이전과 책임에 관한 법(Health Insurance Portability and Accountability Act, HIPAA)이라고 알려진 연방법은 귀하의 건강정보가 이용되는 방법을 보호합니다. HIPAA 는 일반적으로 귀하의 서면 동의 없이 연구를 목적으로 귀하의
연구 목적의 건강정보 사용을 위한 USC HIPAA 승인 1. 본 양식의 목적: 건강보험 이전과 책임에 관한 법(Health Insurance Portability and Accountability Act, HIPAA)이라고 알려진 연방법은 귀하의 건강정보가 이용되는 방법을 보호합니다. HIPAA 는 일반적으로 귀하의 서면 동의 없이 연구를 목적으로 귀하의
<B1B9BEEE412E687770>
 201 학년도대학수학능력시험 6 월모의평가문제및정답 2016 학년도대학수학능력시험 6 월모의평가문제지 1 제 2 교시 5 지선다형 1. 두행렬 성분은? [2 점 ] 에대하여행렬 의 3. lim 의값은? [2점] 1 2 3 4 5 1 2 3 4 5 2. 의값은? [2점] 1 2 3 4 5 4. 공차가 인등차수열 에대하여 의값은? [3 점 ] 1 2 3 4 5
201 학년도대학수학능력시험 6 월모의평가문제및정답 2016 학년도대학수학능력시험 6 월모의평가문제지 1 제 2 교시 5 지선다형 1. 두행렬 성분은? [2 점 ] 에대하여행렬 의 3. lim 의값은? [2점] 1 2 3 4 5 1 2 3 4 5 2. 의값은? [2점] 1 2 3 4 5 4. 공차가 인등차수열 에대하여 의값은? [3 점 ] 1 2 3 4 5
Microsoft PowerPoint - chap06-2pointer.ppt
 2010-1 학기프로그래밍입문 (1) chapter 06-2 참고자료 포인터 박종혁 Tel: 970-6702 Email: jhpark1@snut.ac.kr 한빛미디어 출처 : 뇌를자극하는 C프로그래밍, 한빛미디어 -1- 포인터의정의와사용 변수를선언하는것은메모리에기억공간을할당하는것이며할당된이후에는변수명으로그기억공간을사용한다. 할당된기억공간을사용하는방법에는변수명외에메모리의실제주소값을사용하는것이다.
2010-1 학기프로그래밍입문 (1) chapter 06-2 참고자료 포인터 박종혁 Tel: 970-6702 Email: jhpark1@snut.ac.kr 한빛미디어 출처 : 뇌를자극하는 C프로그래밍, 한빛미디어 -1- 포인터의정의와사용 변수를선언하는것은메모리에기억공간을할당하는것이며할당된이후에는변수명으로그기억공간을사용한다. 할당된기억공간을사용하는방법에는변수명외에메모리의실제주소값을사용하는것이다.