자율주행차의도로주행을위한운행체계및 교통인프라연구개발기획연구 최종보고서 도로교통공단
|
|
|
- 연서 구
- 5 years ago
- Views:
Transcription
1 자율주행차의도로주행을위한운행체계및 교통인프라연구개발기획연구 최종보고서 도로교통공단
2
3 제출문 도로교통공단이사장귀하 본보고서를 자율주행차의도로주행을위한운행체계및교통인프라연구개발 기획연구 의최종보고서로제출합니다 년 12 월 충청북도충주시대학로 50 한국교통대학교산학협력단 대표전문수
4
5 연구진 한국교통대학교과업수행연구진 연구책임자 김진태 한국교통대학교 부교수 연구원 박준태 한국교통대학교 연구교수 연구원 조용빈 한국교통대학교 석사과정 연구원 양지웅 한국교통대학교 석사과정 연구원 김주빈 한국교통대학교 전임연구 연구보조원 조사랑 한국교통대학교 석사과정 연구보조원 김동협 한국교통대학교 학사과정
6 목차 제 1 장서론 연구개발필요성 도로주행운행체계연구개발필요성 교통인프라연구개발필요성 교통안전시설정보제공및운영관리기술개발 연구목적및범위 연구목적 연구범위 연구내용 2 제 2 장자율주행차분야규제변화 국 내외자율주행차규제변화 자율주행차분야규제혁파로드맵주요내용 관련법령 핵심규제이슈 8 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 자율주행차서비스현황및전망 상용화자율주행차기술 자율주행차시장규모전망 자율주행관련운행체계및 AI 운전능력검증체계개발동향조사 자율주행관련법검토 자율주행차운전면허발급및면허관리체계 자율주행차교통경찰현장지시및통제 자율주행차교통사고처리 AI 운전능력평가기준및검증체계 실도로환경시험단지구축 상설시험구간을이용한 AI 운전자격 ( 또는등급 ) 부여 자율주행운전면허실증단지구축 HILS기반 AI 운전능력검증시스템개발 자율주행을위한 AI 기반신호제어시스템개발동향조사 C-ITS 및 RSE 연계형자율주행지원스마트신호제어기개발기술 실시간신호운영을위한자율주행차정보수집기능기술 자율주행차위치및경로정보를이용한신호교차로정체예측기술 59 - i -
7 3.3.4 AI 기반광역네트워크차원의최적신호운영기술 통신기반의개별차량감응제어 (Actuation Control) 기술 자율주행차의운행경로최적화를통한정체관리기술 HILS 기반자율주행신호운영시스템시뮬레이션평가체계 IoT 기반교통안전시설정보제공및운영관리기술개발동향조사 효율적인교통안전시설규제정보공공개방전략 교통안전시설관리를위한표준코드체계 표준코드체계기반교통안전시설물정보관리시스템및관리기관용운영프로그램개발 자율주행차량제조사대상클라우드형정보제공체계 교통안전시설에적합한 IoT 장치요구사항 현장기반 IoT 정보제공응용프로토콜기술검토 관리센터와실시간연동하는관리소프트웨어개발 국내 외특허및연구동향 국내 외특허동향분석 선행연구동향분석 자율주행관련연구기관 95 제 4 장연구개발과제구성 비전및목표 비전 목표 기대효과 연구개발결과활용방안 연구개발과제범위 연구개발요구사항 요구사항분석 과제구성 104 제 5 장연구과제추진전략 과제별주요연구추진내용 연구목표 과제연구목표 : 자율주행관련운행체계및 AI 안전운전능력검증체계개발 과제연구목표 : 자율주행을위한 AI 기반신호제어시스템개발 과제연구목표 : IoT 기반교통안전시설정보제공및운영관리기술개발 연구분야별연차별사업내용 타사업연계방안검토 연차별주요성과및성과지표 연차별주요성과도출 ii -
8 5.2.2 과제별성과목표및성과지표 연구개발추진체계 과제별연구추진전략 과제간관계 연구추진체계 126 제6장자원투입계획 인력투입계획 소요예산산정 정부지원타당성검토 131 제7장과제공모방안 과제제안요구서 과제제안요구서 과제제안요구서 평가기준설정 연구개발목표 연구개발내용 추진전략및계획 개발기술의실용성및경제성 연구책임자의전문성및관리능력 149 부록연구개발관련특허조사 iii -
9 표목차 < 표 2-1> 해외자율주행차규제변화주요내용 5 < 표 2-2> 자율주행단계별정의및주요기능 5 < 표 2-3> 자율주행차분야선제적규제혁파로드맵주요법령 7 < 표 2-4> 단기과제영역별내용 8 < 표 2-5> 중기과제영역별내용 11 < 표 2-6> 장기과제영역별내용 13 < 표 3-1> 자율주행차기술수준분류기준 16 < 표 3-2> 기술수준별제어권설정 16 < 표 3-3> 안전운행요건규정주요내용 19 < 표 3-4> 안전운행요건규정주요내용 20 < 표 3-5> 3단계자율주행차의주요평가요소 32 < 표 3-6> 현행자동차정기검사와자율주행시스템운전면허갱신제도예 40 < 표 3-7> Euro NCAP 자율주행차의안전등급평가항목및내용 49 < 표 3-8> 기가코리아연구개발사업 57 < 표 3-9> 코드부여방식 68 < 표 3-10> 클라우드기술 73 < 표 3-11> 특허동향기술분류 77 < 표 3-12> 본기획과제관련선행연구검색방법 80 < 표 3-13> 선행연구 80 < 표 3-14> 국내자율주행관련산 학 연연구기관현황 95 < 표 4-1> 연구개발항목별목표 98 < 표 4-2> 기술개발요구사항 103 < 표 4-3> 과제구성 105 < 표 4-4> 과제별주요연구내용 106 < 표 5-1> 연구목표및주요연구내용 107 < 표 5-2> 연차별 1과제연구내용 108 < 표 5-3> 연차별 2과제연구내용 109 < 표 5-4> 연차별 3과제연구내용 110 < 표 5-5> 제1차년도연구개발분야별목표 111 < 표 5-6> 제2차년도연구개발분야별목표 112 < 표 5-7> 제3차년도연구개발분야별목표 113 < 표 5-8> 자율주행관련기존유사과제현황 114 < 표 5-9> 자율주행관련기존유사과제차별성및활용방안 116 < 표 5-10> 연차별 1과제주요성과 iv -
10 < 표 5-11> 연차별 2과제주요성과 120 < 표 5-12> 연차별 3과제주요성과 121 < 표 5-13> 1과제성과목표및성과지표 122 < 표 5-14> 2과제성과목표및성과지표 123 < 표 5-15> 3과제성과목표및성과지표 124 < 표 6-1> 지원인력투입총괄 129 < 표 6-2> 과제별연구투입인력 129 < 표 6-3> 소요예산총괄 130 < 표 6-4> ( 과제1) 자율주행관련운행체계및 AI 운전능력검증체계개발소요예산 130 < 표 6-5> ( 과제2) 자율주행을위한 AI 신호제어시스템개발소요예산 130 < 표 6-6> ( 과제3) IoT 기반교통안전시설정보제공및운영관리기술개발 130 < 표 7-1> 평가항목별배점기준 ( 안 ) v -
11 그림목차 < 그림 2-1> 자율주행차선제적규제혁파로드맵 6 < 그림 3-1> 국내상용화되어있는자율주행시스템 15 < 그림 3-2> 서계자율주행차기술의전망 17 < 그림 3-3> 자율주행차시장규모및판매량전망 17 < 그림 3-4> 자율주행차관련입법현황 18 < 그림 3-5> 레벨 2와레벨 3 자율주행차의차이점 31 < 그림 3-6> Cadillac CT6 경고알림의종류 33 < 그림 3-7> 주행오류발생빈도에의한 fallback 전략블록도 34 < 그림 3-8> 위험최소화를위한 fallback 전략블록도 ( 출처 : AUDI) 35 < 그림 3-9> 주-출차시장애물탐지예 37 < 그림 3-10> Audi A8의인터페이스 39 < 그림 3-11> 실제주행영상기반시뮬레이터및 HMI 예상도 39 < 그림 3-12> 제어권이양을위한자율주행차량의체계적 HMI 기법연구 43 < 그림 3-13> 제어권전환안전성평가기술및사회적수용성연구 43 < 그림 3-14> 구글특허예시 44 < 그림 3-15> 교통경찰인식영상 44 < 그림 3-16> 교통사고처리절차 45 < 그림 3-17> 테슬라모델S 사고상황 46 < 그림 3-18> NHTSA의자율주행차평가항목및기준안내서 48 < 그림 3-19> 국내실도로환경시험단지구축및계획현황 50 < 그림 3-20> 자율주행차에필요한인공지능기술분류 52 < 그림 3-21> 미국자율주행도로주행능력평가실증단지 M-City 53 < 그림 3-22> 국내자율주행도로주행능력평가실증단지 K-City 54 < 그림 3-23> 자율주행운전능력평가시스템 HILS 개요도 56 < 그림 3-24> C-ITS 신호연계장치 (CVIB) 정보전달연계도 56 < 그림 3-25> 스마트자율협력주행도로시스템개발 57 < 그림 3-26> 자율주행정보수집기술 58 < 그림 3-27> 통신보안컨넥티드기술 58 < 그림 3-28> LDM(Local Dynamic Map) 59 < 그림 3-29> 자율주행차량의교차로통과지원시스템 60 < 그림 3-30> 차량존재확률분포 60 < 그림 3-31> 통신을통한교차로점유율산정 61 < 그림 3-32> AI 기반광역네트워크신호운영 61 < 그림 3-33> 네트워크신호운영방법 62 - vi -
12 < 그림 3-34> 차량검지방식 63 < 그림 3-35> 통신기반감응방식 63 < 그림 3-36> 고속도로정체관리기법 64 < 그림 3-37> 스마트카센싱연계정체관리기술 64 < 그림 3-38> EBS Test HILS 장치 65 < 그림 3-39> EBS Test HILS 구성도 66 < 그림 3-40> 서울시 T-GIS 시스템의정의 67 < 그림 3-41> T-GIS 정보관리항목 69 < 그림 3-42> 시스템관리및권환체계 70 < 그림 3-43> 시스템운영 / 관리현황 70 < 그림 3-44> T-GIS 시스템구성도 71 < 그림 3-45> High-level view of Kafka architecture 72 < 그림 3-46> IoT 장치연계 73 < 그림 3-47> 노면표시배치방법 74 < 그림 3-48> 교통안전시설물개선 74 < 그림 3-49> IEEE 통신규격 75 < 그림 3-50> V2X 통신기술 75 < 그림 3-51> ISO/TC 204 표준화범위 76 < 그림 3-52> 시설관리표준 S/W기술개발 76 < 그림 3-53> 자율주행기술관련특허동향 78 < 그림 3-54> 국내 AI 교통신호분야특허출원추이 79 < 그림 3-55> 국내 AI 교통신호분야출원인비율 79 < 그림 3-56> Co-Pilot 시스템개념도 81 < 그림 3-57> Co-Pilot 시스템구조 82 < 그림 3-58> 자율주행교통안전정보제공체계 84 < 그림 3-59> 신경망을이용한돌발상황검지알고리즘 85 < 그림 3-60> 돌발상황검지알고리즘 85 < 그림 3-61> 세부기술간연계도 87 < 그림 3-62> V-Link 기술개념도 88 < 그림 3-63> 통합플랫폼하드웨어구성도 91 < 그림 3-64> V2X 네트워킹및응용기술분야 (ISO 13185) 표준화범위 93 < 그림 3-65> 시맨틱공간정보의서비스프레임워크 93 < 그림 4-1> 연구개발비전및목표 97 < 그림 5-1> 연구과제구성체계도 vii -
13 보고서요약서 과제고유번호 - 기획연구연구기간 ~ 공개여부 공개 연구과제명 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 요약 연구책임자 : 한국교통대학교김진태 1. 기술개발필요성 1.1 ( 과제1) 도로주행운행체계연구개발ㅇ자율주행차가도로를주행하기위해서는기술적인발전이외에도일정수준이상의주행안전성능 ( 교통안전 ) 을만족하는운전능력검증과사고발생시배상책임문제등을명확히하는제도의정비가필요 1.2 ( 과제2) 교통인프라연구개발ㅇ자율주행차상용화이후에도자율주행차와사람이운전하는일반차량이혼재된도로환경이상당기간유지될것으로예상되며 C-ITS 등일반차량을대상으로하는지능형교통체계와자율주행시스템을통합한교통신호운영체계구축필요 1.3 ( 과제3) 교통안전시설정보제공및운영관리기술개발ㅇ교통안전시설정보를시각정보외또다른방식으로자율주행차량에전달하는방식을확보할필요가있으며자율주행차와관련된운행체계, 운전능력검증, 신호제어시스템, 교통안전시설관리인프라개발방향에대한연구가필요 2. 연구개발과제구성 2.1 연구비전및목표 - viii -
14 2.2 연구개발과제구성ㅇ ( 세부기술 ) 자율주행차의안전한도로주행지원을위한교통운영및교통안전시설인프라기술개발로구성ㅇ ( 과제구성 ) 자율주행차의성능에대한객관적평가와일반차량과혼재된도로환경의신호제어기술및교통안전시설의정보제공 관리기술이필요함 2.3 과제별주요내용ㅇ과제명 : 자율주행관련운행체계및 AI 운전능력검증체계개발 - 자율주행관련운행체계개발 - 자율주행 AI 운전능력검증시스템개발 - 자율주행운전면허실증단지구축기획연구ㅇ과제명 : 자율주행을위한 AI 기반신호제어시스템개발 - 통신기반의자율주행차신호규제를위한현장시스템개발 - AI 기반통합신호관제시스템개발 - HILS 기반자율주행신호운영시스템시뮬레이터개발 - 중 소도시실증사업설계 / 구축 / 운영 / 평가ㅇ과제명 : IoT 기반교통안전시설정보제공및운영관리기술개발 - 자율주행차를위한교통안전시설운영관리기술개발 - IoT기반교통안전시설물인식기술개발 - 도심교차로환경통합실증ㅇ주요연구개발결과물 - 운전능력검증을위한가상인지환경 Generator 모듈개발 - 자율주행 AI 평가를위한통합체계시제품개발 - 통신기반자율주행차량신호규제현장시스템개발 - 실시간운영을위한현장검사단말기개발 - 인공지능기반통합신호관제시스템설계및실증 - 교통안전시설관리및운영플랫폼개발 - 교통안전시설에적합한 IoT 장치표준개발 - 통신기반의교통안전시설물시제품설치및운영평가 주요연구개발 운행체계개발 AI 기반신호제어 교통안전시설정보제공 Test-Bed 구축및효과평가 목표 자율주행면허발급및관리체계등자율차운행체계마련, AI 법규및안전수칙준수능력검증기준개발 자율주행차와일반차량이혼재해운영되는도로환경에서 AI 기반의스마트신호제어를위한현장장치및관제센터기술개발및실증 IoT 기반으로교통안전시설물의규제정보를제공하고, 관리하기위한스마트교통안전시설운영관리기술개발 AI 기반신호제어, IoT 기반교통안전시설, AI 운전능력검증단지등 Test-Bed 구축및효과평가 - ix -
15 3. 추진전략 3.1 연구추진체계 ㅇ경찰청 총괄 사업으로 전문기관 ( 도로교통공단 ) 이 과제의 관리 평가를 담당하며, 연구단은 본 연 구목표달성을위하여효율적인계획및체계를구성 추진함 - ( 경찰청 ) 본과제추진과관련된정책적판단및의사결정, 기본및시행계획수립등의역할을담당함 - ( 도로교통공단 ) 수요발굴 기획 평가 성과관리등과제전주기의실무를담당함 - ( 연구단 ) 본연구목표달성을위하여필요한연구활동및연구지원활동등효율적인계획및체계를 구성하여추진함 3.2 기술개발전략 ㅇ연차별중점연구개발 - 법제도정비및핵심기술개발에대한기본설계및장비개발진행 (1차년도 ) - 기술개발성능시험및검증진행 (2차년도 ) - 중소도시환경평가및실용화기술개발 (3차년도 ) ㅇ정부, 전문기관, 기업 ( 제작사, 부품사 ) 및유관기관등과유기적협조체제구축 - 기술수요기관의충분한의견수렴을통하여실용성확보 - 각종유사선진시스템및적용사례에대한조사및반영 - 과제성공률제고를위한자문회의등내 외부전문가의견수렴 4. 기대효과및성과활용방안 4.1 기대효과 ㅇ자율주행교통인프라환경구축을통한자율주행차상용화촉진및안전성확보 ㅇ자율주행차관련발전방안연구를수행함으로써관련국제기준선도및기술개발방향성제시 ㅇ자율주행발전방안및인프라환경의효율적인연계로활용기술개발및고도화추진 4.2 성과활용방안 ㅇ AI 운전능력에대한평가체계마련과국내실정에맞는총체적운행체계마련, 지방자치단체및유관기관 연구성과보급 ㅇ IoT 기반통신및교통안전시설기술개발을통한신시장, 신규일자리창출 색인어 ( 각 5 개이상 ) 한글자율주행차운전능력검증 AI 기반신호제어 IoT 교통안전시설연구실증 영어 Autonomous Driving Vehicle Driving Ability Testing Signal Control Based on AI IoT Traffic Safety Facility Validation Demonstration - x -
16 제 1 장서론 제 1 장서론 1.1 연구개발필요성 제 4차산업혁명시대가도래하면서핵심분야인자율주행기술이전세계적으로가속화, 국내에서도임시운행제도마련 ( 16. 2월 ) 이후, 자율주행차의시험운행이급격히증가하고있는추세임 2020년 Level 3 이상자율주행차출시후 2035년까지연평균 88% 의시장성장이전망됨에따라, 공공도로에서의본격적인자율주행이가속화될것으로전망되고있으며현재전세계적으로자율주행차의운행체계를어떻게적용할것인지에대한논란이가중되는가운데, 5년이상준비가진행된미국경우에도자율주행차안전확보를위한연구가진행중임 국내의경우자율주행차임시운행과관련된규정은존재하나실제도로운행을위한법제도등운행체계는미비한상황이며, 자율주행자동차의안전확보를위한운행체계틀마련이필요한실정으로일반차량과다른자율주행차의주행특성상도로인프라환경과신호제어등관련시설의구축및관리 ( 보안 ) 시스템에대한준비과정또한필수적이며설계단계부터법 규제와의연계성등에대한검토가필요함 도로주행운행체계연구개발필요성 자율주행차가도로를주행하기위해서는기술적인발전이외에도일정수준이상의주행안전성능 ( 교통안전 ) 을만족하는운전능력검증과사고발생시배상책임문제등을명확히하는제도의정비가필요함 - 자율주행장치에의해운전되는자율주행차는사람인운전자에게부여하는운전면허를대신할별개의면허제도가부재함 또한자율주행차의상용화를위해서는운전능력평가시스템을개발하고, 교통사고처리등에대한관련법의정비등전반적인운행체계구비가필요함 교통인프라연구개발필요성 자율주행차상용화이후에도자율주행차와사람이운전하는일반차량이혼재된도로환경이상당기간유지될것으로예상되며, C-ITS 등일반차량을대상으로하는지능형교통체계와자율주행시스템을통합한교통신호운영체계구축필요함 자율주행환경에서도신호교차로로인한불필요한정체를해소하기위해전통적인교통신호운영체계와자율주행차의위치와경로를제어하는운행관제시스템융합기술이필요하며 AI 기반의최적교통신호운영을위한통합신호관제시스템기술개발이필요함 - 1 -
17 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 교통안전시설정보제공및운영관리기술개발 자율주행차량은검지장치를통해수집된교통정보를통해주변의교통상황을인지, 판단및제어함현재인간운전자기준으로설치, 운영중인교통안전시설은자율주행차량검지장치에시각정보만을전달하기때문에교통안전시설에대한시각정보가차단될경우자율주행차는인간운전자와교통상황을다르게인지하여도로안전을위협할수있음따라서교통안전시설정보를시각정보외또다른방식으로자율주행차량에전달하는방식을확보할필요가있으며자율주행차와관련된운행체계, 운전능력검증, 신호제어시스템, 교통안전시설관리인프라개발방향에대한연구가필요함 1.2 연구목적및범위 연구목적 자율주행차기술의급격한확산과미래대비변화하는교통환경에대응하는교통체계구축제반사항을검토하고관련연구의방향성을기획함 최근자율주행차의임시운행허가, 미래형스마트시티자율주행실증단지구축등자율주행차의도로주행을위한기반환경조성을추진중으로자율주행기술도입에대비한자율주행교통체계선제적대응과준비를추진함 연구범위 가. 시간적범위 최신자율주행관련운행체계및교통인프라기술및연구개발국내 외동향분석 나. 내용적범위 자율주행차와관련된운행체계, 운전능력검증, 신호제어시스템, 교통안전시설관리, 인프라개발관련정책및기술, 연구및기술개발방향성기획 도로교통관리, 운영의미래지향적발전기반자율주행시대를대비한준비및개선사항조사 분석 연구내용 자율주행관련운행체계및 AI 운전능력검증체계연구기획 - 자율주행운행체계개발연구기획 - 자율주행 AI 운전능력검증시스템개발연구기획 - 자율주행운전면허실증단지구축연구기획 - HILS기반 AI 운전능력검증시스템연구기획 - 2 -
18 제 1 장서론 자율주행을위한 AI 기반신호제어시스템연구기획 - 통신기반자율주행차신호규제를위한현장시스템개발연구기획 - AI 기반통합신호관제시스템개발연구기획 - HILS기반자율주행신호운영시스템시뮬레이터개발연구기획 - 중 소도시실증사업설계 / 구축 / 운영 / 평가기술개발연구기획 IoT 기반교통안전시설정보제공및운영관리기술개발연구기획 - 자율주행차를위한교통안전시설운영관리기술개발연구기획 - IoT기반교통안전시설물인식기술개발연구기획 - 도심교차로환경통합실증연구기획 - 3 -
19 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 편집상여백 - 4 -
20 제 2 장자율주행차분야규제변화 제 2 장자율주행차분야규제변화 2.1 국 내외자율주행차규제변화 미국, 영국등자율주행차선진국은기술개발및일부법 제도개선에있어우리나라에비해앞선상황이나, 미래예측 융합연구 연동계획을통한선제적이고종합적인규제혁파로드맵설계는우리나라가가장혁신적임 < 표 2-1> 해외자율주행차규제변화주요내용 구분내용주요발표 미국 영국 EU 미국도로교통안전국 (NHTSA), 자율주행차분야초기규제모델제시 영국교통부 (Department for Transport, DfT), 자율주행차촉진을위한정부추진단기과제제시 EPoSS('15.4.), ERTRAC('15.7, 17.5) 자율주행차기술개발중심의로드맵을제시하며규제개선필요성등언급 연방자율주행차정책 (Federal Automated Vehicle Policy) 가이드라인발표 ( 16.9.) 2차가이드라인 (Automated Driving Systems 2.0) 발표 ( 17.9.) 무인자동차의도로 : 자율주행차기술을위한법 제도의검토 (The Pathway to Driverless Cars : A detailed review of regulations for automated vehicle technologies) 발표 ('15) EPoSS(European Roadmap Smart Systems for Automated Driving) 보고서, ERTRAC(European Road Transport Research Advisory Council) 보고서발표 우리나라에서는 ' 자율주행차분야선제적규제혁파로드맵 을구축, ICT 융합대표신산업인 자율주행차 분야에우선시범구축함 자율주행차분야규제혁파는제작, 안전, 교통, 보험, 통신보안, 개인정보등다양한규제이슈가포함되며구체적인상용화일정이제시되는등단계적인발전양상예측이가능한분야로세계적으로통용되는 6 단계 ( 레벨 0~ 레벨 5) 발전단계를고려함 < 표 2-2> 자율주행단계별정의및주요기능 단계레벨 0 레벨 1 레벨 2 레벨 3 레벨 4 레벨 5 기술과거현재 명칭무자율운전자보조부분자율조건부자율고도자율완전자율 정의 주요기능 모든운전운전자가수행 자율주행기능없음 운전자 : 주행, 시스템 : 조향, 가감속의특정주행모드수행 차간거리유지 차선유지 운전자 : 주행, 시스템 : 조향, 가감속기능복합되어특정주행모드수행 ( 현재수준 ) 차간거리유지 + 차선유지 자동주차 시스템 : 주행운전자 : 시스템의개입요청에적절대응, 항상차량제어를위한준비자세 고속도로자율주행 시스템 : 주행, 운전자가개입요청에적절히대응못하는경우에도시스템주행가능 특정구간및기상상황제외한자율주행 모든조건에서시스템이상시운전 자율주행 무인운송 - 5 -


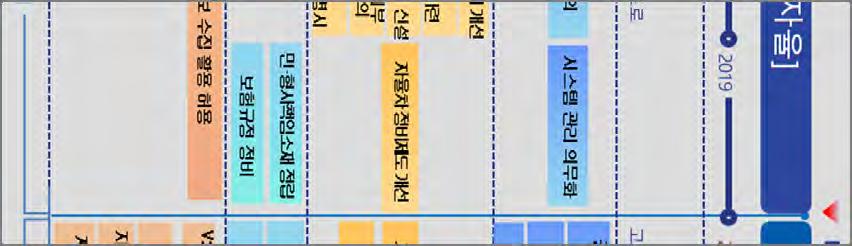
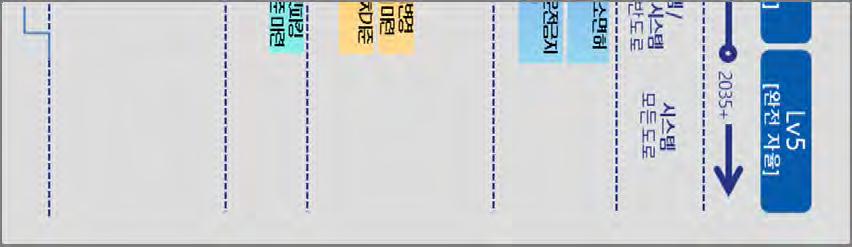
21 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 2-1> 자율주행차선제적규제혁파로드맵 ( 자료 : 국무조정실보도자료 ; ) - 6 -
22 제 2 장자율주행차분야규제변화 2.2 자율주행차분야규제혁파로드맵주요내용 관련법령 자율주행차분야와관련된규제장벽을개선하기우리나라중앙부처들은다양한법령내용을검토하고있으며이들법령들은 < 표 2-3> 과같음 < 표 2-3> 자율주행차분야선제적규제혁파로드맵주요법령구분관련법령부처 1 자동차관리법및하위법령 2 자율주행차의안전운행요건및시험운행등에관한규정 3 튜닝부품인증제운영에관한규정 4 자동차튜닝에관한규정 5 자동차및자동차부품의성능과기준에관한규칙 6 도로법및하위법령국토부 7 자동차손해배상보장법및하위법령 8 화물자동차운수사업법및하위법령 9 건설기계관리법및하위법령 10 여객자동차운수사업법및하위법령 11 국가통합교통체계효율화법및하위법령 12 주차장법및하위법령경찰청 15 특정범죄가중처벌등에관한법률및하위법령법무부 18 상법및하위법령 19 위치정보법및하위법령방통위 20 정보통신망법및하위법령방통위 과기정통부 21 개인정보보호법및하위법령행안부 도로교통법및하위법령제조물책임법 ( 민법 ) 교통사고처리특례법및하위법령형법 국토부에서는총 12개자율주행차관련법령과관련된규제내용을검토하고있음 경찰청은총 2개자율주행차관련법령과관련된규제내용을검토하고있음 법무부는총 4개자율주행차관련법령과관련된규제내용을검토하고있음 방송통신위에서는총 2개자율주행차관련법령과관련된규제내용을검토하고있음 행정안전부에서는총 1개자율주행차관련법령과관련된규제내용을검토하고있음 - 7 -
23 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 핵심규제이슈 가. 단기과제 : 부분자율주행 ( 레벨 2) 상용화 조건부자율주행 ( 레벨 3) 기반마련단계 (2018~2020) 자율주행차도입을위한단계적과정으로레벨 2 와레벨 3 에해당하는문제를별도로구분함 해당시기에극복하여야할문제를 (1) 운전자주체영역, (2) 차량장치영역, (3) 운행영역, (4) 인프라영역으로또다시구분하여이들을극복또는문제해결을지원하는방향으로법령정비수행되고있음 < 표 2-4> 단기과제영역별내용 구분과제명정비내용조치사항 운전주체영역 차량장치영역 자율주차시운전자이석허용 ( 경찰청 ) * 법률개정사항 운전자재정의 ( 경찰청 ) * 법률개정사항 시스템관리의무화 ( 국토부, 경찰청 ) * 법률개정사항 자율주행기능정의개선 ( 국토부 ) * 법률개정사항 자율주행여부외부표시의무화논의 ( 국토부 ) * 법률개정사항 제어권전환규정신설 ( 국토부 ) * 시행령이하개정사항 [ 기존 ] 운전자이석시 정지상태유지의무 로자동주차불가 [ 개선 ] 운전자이석시 교통사고방지의무 등으로개정하여자동주차허용 [ 기존 ] 현행도로교통법은사람만을운전자로규정 * 비엔나협약등국제협약에서기계까지운전자포함논의중 [ 개선 : 사람대신기계 ( 시스템 ) 가주행하는상황을대비하여, 관련규정개정 [ 기존 ] 현행자동차검사의무, 정비불량차운전금지의무등에자율주행차에부합하는운전자의자동차관리의무 ( 예 : S/W업데이트의무 ) 미포함 [ 개선 ] 운행자의관리소홀로인한문제발생을대비하여시스템관리의무화 [ 기존 ] 현행법상자율주행기능의정의는 운전자또는승객의조작없이자동차스스로운행하는기능 으로자율주행발전단계를고려하지않음 [ 개선 ] 발전단계별로달라지는자율주행기능 ( 예 : 부분자율주행, 조건부자율주행, 완전자율주행 ) 에대한정의개선 [ 기존 ] 자율주행차운행시외부에서알수있게하는표식부재하여, 외부차량운전자및보행자가자율주행차량인식불가 * 현재임시운행허가를받은자율주행차의경우, 자율주행차시험운행 표지부착 [ 개선 ] 자율주행차운행시외부에서알수있도록표식의무화논의 [ 기존 ] 자율주행시스템이주된주행을담당하고, 위급상황에서운전자에게운전제어권이전환되는조건부자율주행단계자율주행차에대한운전제어권이전방안등관련기준부재 * 예 : 기능고장감지및경고장치, 모드전환표시장치등관련기준 [ 개선 ] 자율주행시스템과운전자간운전제어권전환에관한기준마련 ( 기조치 ) 도로교통법개정완료 ( 시행) * 기발표 도로교통법개정 (~ 19) 자동차관리법및도로교통법규정신설 (~2020) 자동차관리법, 자율주행차의안전운행요건및시험운행등에관한규정, 자동차및자동차부품의성능과기준에관한규칙개정 (~ 19) ( 필요시 ) 자동차관리법규정신설 (~2019) 자동차관리법령, 자동차및자동차부품의성능과기준에관한규칙규정신설 (~20) - 8 -
24 제 2 장자율주행차분야규제변화 < 표계속 > 단기과제영역별내용 구분과제명정비내용조치사항 차량장치영역 자율주행운행설계영역 (ODD) 명시 ( 국토부 ) * 시행령이하개정사항 기능안전기준마련 ( 국토부 ) * 시행령이하개정사항 [ 기존 ] 완전한자율주행이가능하기전까지, 단계별운행허용기준미비 * 미국도로교통안전국 (NHTSA) 에선제조사로하여금자율주행이가능한운영설계영역 (ODD*: Operation Design Domain) 설계하고준수하도록권고 * ODD: 자율주행차운행중도로종류, 날씨등의여러제약사항발생시어떤기능들이실행되어야하는지에대한세부조건을설계하는것 [ 개선 ] 제작사별로, ODD 설계하도록하고설계범위내에서자율주행하도록 ODD설계를위한기준마련 [ 기존 ] 차량제작및안정적운행을위한안전관리기준미비 [ 개선 ] S/W안전성인증등을포함하여안정적자율주행을위해필요한요건마련, 자율주행차제작을위한중요안전기준항목개발 * 자율차개발시자발적으로안전성을확보하도록권고하는 자율주행차가이드라인 을제시 (~2018) 자동차관리법령, 자동차및자동차부품의성능과기준에관한규칙규정신설 (~2019) 자동차관리법령, 자동차및자동차부품의성능과기준에관한규칙, 규정신설 (~2019) 자율주행차검사 / 정비제도개선 ( 국토부 ) * 시행령이하개정사항 [ 기존 ] 현재자율주행차임시운행허가를받은자에대해서만주요장치및기능변경사항, 운행기록등에대한검사근거존재 [ 개선 ] 자율주행차상용화대비자율주행차에적합한검사기준마련 (~2022) 및필요시정비범위등관련규정개정 (~2020) 자동차관리법령개정 (2020~2022) 민사책임소재정립 ( 국토부, 법무부 ) * 법률개정사항 [ 기존 ] 자동차의운행에의한사고발생시운행자에손해배상책임귀속 [ 개선 ] 자율주행차사고에대하여배상체계 ( 책임주체등 ) 를명확히하는방향으로개선 ( 필요시 ) 자동차손해배상보장법, 제조물책임법개정 (~2020) 운행영역 형사책임소재정립 ( 경찰청, 법무부 ) * 법률개정사항 [ 기존 ] 교통사고로인한사람의사상또는재물의손괴발생시운전자에게형사책임부과 [ 개선 ] 자율주행중사고시운전자의형사책임재정립이필요하며, 이를위한사회적합의필요 교통사고처리특례법, 특정범죄가중처벌법등개정 (~2020) 보험규정정비 ( 국토부, 법무부, 금융위 ) * 법률개정사항 [ 기존 ] 교통사고발생시피해자사상 ( 死傷 ) 에대한손해배상보험은자동차보유자에게가입의무부과 [ 개선 ] 자동차보험가입의무대상자변화등논의필요 ( 보유자 보유자 제작자 ) ( 필요시 ) 자동차손해배상보장법등개정 (~2020) - 9 -
25 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 표계속 > 단기과제영역별내용 구분과제명정비내용조치사항 인프라영역 영상정보수집 활용규제개선 ( 행안부, 방통위 ) * 법률개정사항 위치정보규제개선 ( 방통위 ) * 법률개정사항 자율주행정밀맵규제개선 ( 국토부 ) * 시행령이하개정사항 [ 기존 ] 자율주행차가영상정보수집 처리 * 시개인정보보호법령등적용여부불명확하여, 자율주행운전자또는자동차업계의개인정보보호법령위반우려 * 예 : 주행중보행자의영상정보수집 처리등 [ 개선 ] 자율주행을위한영상정보수집및처리가가능하도록, 개인정보보호법등관련규제의적용여부를명확히하고 (~ 19), 커넥티드카의발전에따라정보통신서비스제공자의영상정보처리에관한정보통신망법관련규정개정 (~2020) [ 기존 ] 주행중물건의위치정보수집시수집에관한소유자의동의를일일이받아야하는문제 [ 개선 ] 개인의위치가아닌단순한물건의위치정보수집에관해선사전동의원칙예외적용 [ 기존 ] 자율주행관련민간업체의정밀맵활용에관한규제가불명확하여적극적인활용애로 [ 개선 ] 민간업체및단체에적용가능한국가공간정보관련국토지리정보원규정개정 개인정보보호법유권해석또는 ( 필요시 ) 개정 / 정보통신망법개정 (~2020) ( 기조치 ) 위치정보법개정완료 (' ) 및시행 (' ) * 기발표 ( 기조치 ) 국토지리정보원국가공간정보보안관리규정개정완료 ( 시행) * 기발표
26 제 2 장자율주행차분야규제변화 나. 중기과제 : 조건부자율주행 ( 레벨 3) 상용화 고도자율주행 ( 레벨 4) 기반마련단계 (2021~2025) 자율주행차도입을위한단계적과정으로레벨 3 과레벨 4 에해당하는문제를별도로구분함 해당시기에극복하여야할문제를 (1) 운전자주체영역, (2) 차량장치영역, (3) 운행영역, (4) 인프라영역으로또다시구분하여이들을극복또는문제해결을지원하는방향으로법령정비수행되고있음 < 표 2-5> 중기과제영역별내용 구분과제명정비내용조치사항 군집주행선두차량자격신설 ( 경찰청 ) * 법률개정사항 [ 기존 ] 자율주행기술개발로가능해질군집주행 * 시선두차량운전자격에관한기준부재 * 선두차량의유도및제어에따라, 후속자율주행차량들이짧은간격 (10m이하) 로늘어서서, 하나의군집을형성하여주행 [ 개선 ] 물류수송등을위한군집주행시선두차량운전자 ( 또는시스템 ) 의자격요건신설 도로교통법규정신설 (~2022) 운전주체영역 사전교육의무화 ( 경찰청, 국토부 ) * 법률개정사항 [ 기존 ] 현재운전면허를받으려는사람에게운전자기본예절, 도로교통법령, 긴급자동차길터주기요령등에관한교통안전교육의무부과 [ 개선 ] 발전해가는자율주행기능에대한사전교육의무화 ( 또는제조사의운전자에대한교육의무화 ) 도로교통법, 자동차관리법개정 (~2022) 모드별운전자주의의무완화 ( 경찰청 ) * 법률개정사항 [ 기존 ] 현재운전중휴대전화등영상기기사용금지 [ 개선 ] 자율주행모드인경우에영상기기등의조작허용 도로교통법개정 (~2025) 차량장치영역 자율주행사고기록시스템구축 ( 국토부 ) * 시행령이하개정사항 [ 기존 ] 자율주행차사고발생시사고기록분석을통한운전자및시스템간책임소재분석이필수적이나, 사고기록장치 ( 사고전후일정시간동안자동차의운행정보를저장 확인할수있는장치 ) 장착및분석등사고기록시스템구축미비 [ 개선 ] 자율주행사고기록시스템구축 * 에관한기준마련 * 사고기록장치항목및장착등기준마련, 사고기록분석체계마련등 자동차관리법령, 자동차및자동차부품의성능과기준에관한규칙개정 (~2021) 군집주행차량요건신설 ( 국토부, 경찰청 ) * 법률개정사항 [ 기존 ] 군집주행을위해차량이갖추어야할 H/W 또는 S/W 등기술적요건부재 [ 개선 ] H/W 또는 S/W기술진보에따라의무안전거리축소등군집주행요건개선 자동차관리법규정신설및 ( 필요시 ) 도로교통법개정 (~2022) 운행영역 군집주행규제관련법예외신설 ( 경찰청 ) * 법률개정사항 [ 기존 ] 현행법상안전거리확보의무및 2대이상의자동차가앞뒤로또는좌우로줄지어통행하는것을금지하는공동위험행위금지조항으로군집주행불가 [ 개선 ] 군집주행허용을위해안전거리확보및공동위험행위금지규정에대한특례신설 도로교통법규정신설 (~2022)
27 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 표계속 > 중기과제영역별내용 구분과제명정비내용조치사항 인프라영역 V2X( 인프라 / 차량간 / 교통 ) 정보제공방식표준및관리기준마련 ( 국토부, 경찰청 ) * 법률개정사항 자율주행시스템보안 ( 국토부, 과기정통부 ) * 법률개정사항 자율주행인프라연계및관리기준 ( 국토부, 경찰청 ) * 법률개정사항 자율주행허용도로구간표시 ( 경찰청, 국토부 ) * 법률개정사항 [ 기존 ] 연속류 ( 예 : 고속도로 ) 등일부도로구간에대하여통신기반자율주행을가능케하는국제인프라정보표준포맷만존재 [ 개선 ] 전구간인프라정보에대한표준화및원격제어신호등표준화기준마련필요 * 교통신호정보를자율차에제공하기위한교통신호정보표준안마련 (~ ) [ 기존 ] 통신기반자율주행이활성화될경우, 자율주행시스템해킹이나개인정보유출등의문제에관한보안대책부재 [ 개선 ] 자율주행차운행통신인프라에관한사이버보안대응등인프라관련규정마련 * 예 : 자율주행전용정보보안소프트웨어필수장착및업데이트의무화, 통신단말기인증및보안기준마련등 [ 기존 ] 자율주행사고발생등을방지하기위한인프라관리기준 * 부재 * 예 : 통신인프라 (ITS/ 지능형교통체계 ) 와자동차간연계방안, 인프라장애시대처방안등 [ 개선 ] 통신기반자율주행을대비하여인프라관리기준정립 [ 기존 ] 자율주행차와비자율주행차의혼합운행을대비한도로표시관련기준부재 [ 개선 ] 혼합운행되는상황을대비하여, 자율주행이허용되는도로구간의표시에관한기준설계 도로교통법시행규칙, 국가통합교통체계효율화법등규정신설 (~2022) 자동차관리법, 도로법규정신설 (~2022) 도로법, 도로교통법규정신설 (~2022) 도로교통법, 도로법개정 (~2022)
28 제 2 장자율주행차분야규제변화 다. 장기과제 : 고도자율주행 ( 레벨 4) 상용화 완전자율주행 ( 레벨 5) 기반마련단계 (2026~2035+α) 자율주행차도입을위한단계적과정으로레벨 4 과레벨 5 에해당하는문제를별도로구분함 해당시기에극복하여야할문제를 (1) 운전자주체영역, (2) 차량장치영역, (3) 운행영역으로또다시구분하여이들을극복또는문제해결을지원하는방향으로법령정비수행되고있음 < 표 2-6> 장기과제영역별내용 구분과제명정비내용조치사항 운전주체영역 차량장치영역 운행영역 자율주행용간소면허신설 ( 경찰청 ) * 법률개정사항 과로, 질병등운전금지관련특례신설 ( 경찰청 ) * 법률개정사항 구조 / 기능 / 장치변경 ( 튜닝 ) 인증체계마련 ( 국토부 ) * 시행령이하개정사항 좌석배치등장치기준개정 ( 국토부, 경찰청 ) * 시행령이하개정사항 원격주차대비주차장안전기준마련 ( 국토부 ) * 법률개정사항 [ 기존 ] 현재운전자 ( 사람 ) 가차량을직접운전하는경우에적합한운전면허제도시행 [ 개선 ] 자율주행기능이적용된차종을운전할수있는간소면허또는조건부면허신설 [ 기존 ] 과로, 질병등의영향과그밖의사유로정상적으로운전하지못할우려가있는상태등을운전결격및금지사유로규정 [ 개선 ] 자율주행이상용화될경우현행운전결격사유나금지사유의완화를위한특례신설 [ 기존 ] 일반차를이용한자율주행튜닝시안전기준및적합인증부재 [ 개선 ] 자율주행차튜닝허용여부및허용범위등을포함한일반차자율주행튜닝제도개선검토 [ 기존 ] 운전석, 차량조종장치등의장치기준은운전자가주행하는차량에맞추어규정 [ 개선 ] 완전자율주행차의경우운전석이나차량조종장치, 후사경등위치고정이불필요하여관련장치기준개정필요 [ 기존 ] 주차장내에서자율주행발렛파킹 ( 원격주차 ) 을대비한안전기준부재 [ 개선 ] 주차장내자율주행발렛파킹이가능하도록, 자율주행인프라설비등에관한안전기준제시 도로교통법개정 (~2027) 도로교통법개정 (~2027) 자동차관리법령, 자동차튜닝에관한규정, 튜닝부품인증제운영에관한규정개정 (~2027) 자동차관리법, 자동차및자동차부품의성능과기준에관한규칙, 도로교통법, 여객자동차운수사업법개정 (~2027) 주차장법규정신설 (~2027)
29 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 편집상여백






30 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 제 3 장국내 외자율주행운행체계및교통인프라 동향및환경분석 3.1 자율주행차서비스현황및전망 상용화자율주행차기술가. 기술개발현황 현재상용화자율주행차기술은 6가지핵심기술로자동차를운행하는데운전자를보조하는기능들로정의되어있음 이런기능들은현대기아자동차뿐만아니라다양한제조사들까지포함하고있는일반기능으로중저가제품에까지확산되어있으며초기단계는고속도로에서일정한차간거리와속도를유지하며자동운행하는항법기능에서부터시작된기능임 ( 가 ) 차간거리제어기능 ( 나 ) 차선유지기능 ( 다 ) 자동긴급제동시스템 ( 라 ) 후 측방충돌회피지원시스템 ( 마 ) 주차조향보조시스템 ( 바 ) 차선이탈경보시스템 < 그림 3-1> 국내상용화되어있는자율주행시스템 - 차간거리제어기능 (ACC, Advanced Cruise Control) 은가속페달을밟지않아도차량의속도를일정하게유지하며전방의차량을감지하여앞차와의거리를일정하게유지시켜주는장치이며차선유지기능 (LKAS, Lane Keeping Assist System) 은영상인식센서를이용하여전방차선을인
31 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 식하고스티어링휠을제어하여차선을유지할수있도록하는기능임 - 자동긴급제동시스템 (AEB, Autonomous Emergency Brake) 은레이더와카메라를통하여전방의장애물과의거리를미리인식하여충돌위험을알려주어충돌을피하거나충돌위험을줄이는데기여할수있음 - 후측방충돌회피지원시스템 (ABSD, Active Blind Spot Detection) 은레이더를이용하여차량의후측방영역을감지하여운전자에게정보를제공하며주차조향보조시스템 (SPAS, Smart Parking Assistance System) 은차량스스로주차위치를탐색하고운전자는변속기와페달만작동하여주차나. 전망 자율주행차기술의수준은주로미국도로교통안전청 (NHTSA) 과 SAE(Society of Automotive Engineers) 정의에따르면레벨 3단계부터는자동차즉인공지능이주체가되며레벨 4단계부터는사람의개입없이자동화된상황에서운영될것으로예측됨 < 표 3-1> 자율주행차기술수준분류기준 구분 기술단계 특징 내용 Level 0 비자동 운전자가차량을완전히제어하는단계 사람 Level 1 운전자지원 조향, 가감속등을자동화해운전자가도움을받는수준 Level 2 부분자동화 고속도로와같은비교적운행이쉬운구간만자동차가조작하고운전하는단계 자동차 Level 3 조건부자동화 Level 4 고도자동화 Level 5 완전자동화 자료 : SAE( 국제자동차기술자협회 ) 눈과손을자유롭게해도될정도로자동차가조작하고운전하나, 돌발상황에서는사람의제어가필요 자동차가주행, 비상시대처등을모두조작하고운전하며운전자제어가불필요 모든도로환경에서시스템이항상주행하며, 사람이타지않고도자동차가스스로조작하고운전함 자율주행차는가감속, 조향및전방주시등제어기능및모니터링역할에따라단계별로제어권을구분하고있음 < 표 3-2> 기술수준별제어권설정 기술단계 조향, 가속및 주행환경 주행중비상상황 운전자사용유무 (SAE) 제동작동주체 모니터링 대응책임 가감속 조향 전방주시 Level 2 AI 시스템 운전자 운전자 X X O Level 3 AI 시스템 AI 시스템 운전자 X X Level 4 AI 시스템 AI 시스템 AI 시스템 X X X Level 5 AI 시스템 AI 시스템 AI 시스템 X X X 자료 : UNECE/WP29/ITS-AD-04-05, SAE J3016, NHTSA 가이드라인, 국토교통과학기술진흥원 (2016)
 가트너 Hype Cycle ( 나 ) S 커브 ( 레벨 3 이상 ) < 그림 3-2> 서계자율주행차기술의전망 ( 자료 : Gartner 2017) 3.1.2 자율주행차시장규모전망 글로벌자율주행차관련기업들이 2020년을상용화시기로선정함에따라시장조사기관들은 2020")
32 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 자율주행차의대중화를위해서는최소 10년이상이소요될것으로전문가들은예상하고있으며가트너의 Hyper Clcle의기술성숙도에근거하면레벨 2수준은이미상용화되어있으나, 레벨 3 이상자율주행차의경우기술안전성을검증받으려면적어도 5년이상의시간이필요할것으로예상하고있음 - 자율주행차는레벨 3 도입이시작되는 2020년의겨우 1% 점유, 2030년경에는 15 20% 보급률을예측하고있음 ( 가 ) 가트너 Hype Cycle ( 나 ) S 커브 ( 레벨 3 이상 ) < 그림 3-2> 서계자율주행차기술의전망 ( 자료 : Gartner 2017) 자율주행차시장규모전망 글로벌자율주행차관련기업들이 2020년을상용화시기로선정함에따라시장조사기관들은 2020 년대가되어야본격적인시장형성이가능할것으로전망하고있음 BCG( 보스턴컨설팅그룹 ) 는자율주행차의시장규모를 2025년약 420억달러 ( 약 50조원 ), 2035년에는세계자동차판매량의 25% 는자율주행차가차지할것이며, 그중완전자율주행차는 1,200만대, 부분자율주행차는 1,800만대에이를것으로전망하고있음 < 그림 3-3> 자율주행차시장규모및판매량전망 ( 자료 : IHS Automotive. 2014)
 이외의입법현황은현재법상에서나타나고있지는않음 그와관련한논의와연구는각논문및연구자료등을통하여지속적으로이어지는것으로보이고있기는하나기술력의현실화에앞서이루어지기는어려운부분이상당히존재할것으로판단 뿐만아니라국제협약의논의에따라국내법의개정이진행되어야하기에아직까지입법에대한논의만진행되고있는실정임 < 그림 3-4> 자율주행차관련입법현황")
33 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 3.2 자율주행관련운행체계및 AI 운전능력검증체계개발동향조사 자율주행관련법검토가. 국내입법현황 (1) 제도적측면 국내의자율주행차와관련한입법의경우자동차관리법상의자율주행차에대한정의부분 ( 법제2조1 의3 자율주행차 란운전자또는승객의조작없이자동차스스로운행이가능한자동차를말한다.) 이외의입법현황은현재법상에서나타나고있지는않음 그와관련한논의와연구는각논문및연구자료등을통하여지속적으로이어지는것으로보이고있기는하나기술력의현실화에앞서이루어지기는어려운부분이상당히존재할것으로판단 뿐만아니라국제협약의논의에따라국내법의개정이진행되어야하기에아직까지입법에대한논의만진행되고있는실정임 < 그림 3-4> 자율주행차관련입법현황 또한그밖의관련현황으로는개정된자동차관리법및동법시행령, 시행규칙에따라 2016년 2월 12일에고시되고 2017년 3월 31일일부개정된 자율주행자동차의안전운행요건및시험운행등에관한규정 ( 국토교통부고시제 호.) ( 이하 안전운행요건규정 ) 이시행됨에따라시험및연구를목적으로자율주행차임시운행이가능하게됨 주요내용으로는자율주행차의안전운행요건으로자율주행차의시험및연구를목적으로운행하려는자에대하여안전운행요건을갖추어야함
34 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 < 표 3-3> 안전운행요건규정주요내용 구분 일반적안전운행요건 ( 제 3 조 ~ 제 9 조 ) 자율주행자동차의구조및기능 ( 제 10 조 ~18 조 ) 임시운행관련요건 ( 제 19~22 조 ) 자율주행자동차는자동차자기인증이완료된자동차를대상으로하고, 모든공공도로주행관련재반법령을준수하도록제작되어야함 ( 제 3 조 ) 내용 자율주행자동차임시운행허가신청인이교통사고로인한손해에대한배상책임을충실히하도록명시함 ( 제4조제1항 ) 자율주행자동차임시운행허가신청인은자율주행기능의작동을확인할수있도록시험시설등에서충분한사전주행을실시의무화 ( 제5조 ) 허가신청대상자동차제시, 자율주행자동차의기술단계 구조및기능에대한설명서, 시험 연구계획서등필요한제출서류목록규정 ( 제6 7조 ) 후방차량운전자가자율주행자동차임을확인할수있는표지부착 ( 제6조 ) 성능시험대행자는자율주행자동차의안전운행요건등을확인하기위하여신청인에게명확하게규정된 시험운행확인방법및기준 에따라시험운행을요청할수있음 ( 제9조 ) 자율주행시스템의기능을쉽게조작할수있는조종장치와자율주행시스템의기능작동여부를확인할수있는표시장치를갖추어야함 ( 제10~13조 ) 자율주행시스템의기능고장발생을감지하고운전자에게경고를줄수있는기능고장감지장치및경고장치를갖추어야함 ( 제13 14조 ) 자율주행자동차의안전운행을위하여최고속도제한장치및전방충돌방지기능을할수있는장치를장착하여야함 ( 제16조 ) 자율주행자동차임시운행에따른사고발생시사고분석을할수있도록운행기록장치및영상기록장치를갖추어야함 ( 제17 18조 ) 시험운행시운전자로하여금충분한안전조치를취하도록하고, 임시운행허가신청인은자율주행자동차의기능을충분히인지하고있는자를운전자로지정하고관리해야함 ( 제19조 ) 피견인자동차의연결운행금지 ( 제20조 ) 새로운기술을갖춘자율주행자동차를시험운행할수있도록특례적용근거마련 ( 제22조 ) 자료 : 법률신문, 4 차산업혁명과자율주행자동차, 자율주행자동차국내법제, 기사참조. 이에따라현재자율주행차의임시운행의허가를받기위해서는국토부장관에신청하여야하고 ( 자동차관리법제27조제1항단서 ), 이에임시운행허가를받은자율주행차는국토부장관이정한운행구역에서만운행이가능하였으나, 개정및시행된자동차관리법시행규칙에따라일부구간을제외한모든도로환경에서시험운행을허용하게됨 ( 자동차관리법시행규칙제26조의2제1항제3호 ) (2) 기준적측면 산업통상자원국가기술표준원은 자율주행차산업육성을위하여 도로차량 자율주행자동차의주차시스템 일본요구사항및활용사례 를 KS로제정하여고시함
35 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 표 3-4> 안전운행요건규정주요내용 구분 자율주차조건 자율주차방법 내용 자율주행이가능한승용차에만적용되고, 주차단위구획이명확한평지에서의주차만을다루며, 평행주차, 직각주차, 대향주차 ( 기울 45, 60 ) 3 가지방식을규정 운전자의탑승유무에따라 1 운전자가탑승한상태에서운전대를잡지않고자율주차하는방법과 2 운전자가하차한상태에서자율주차하는방법으로구분 운전자가하차한상태에서의자율주차는근거리또는원거리에서단말이나중앙관제시스템으로제어되며 1 운전자단말의원격명령, 2 주차중앙관제시스템에서주차단위구획지정, 3 자동차에의한임의의주차단위구획담색, 4 운전자에의한주차위치임의지정자율주차등 4가지방식규정 자료 : 법률신문, 4 차산업혁명과자율주행자동차, 자율주행자동차국내법제, 나아가자율주행차통신용주파수공급및센서고도화를위한규제혁신으로 신고하지아니하고개설할수있는무선국용무선기기 ( 미래창조과학부고시제 호, , 일부개정및시행 ) 및 간이무선국 우주국 지구국의무선설비및전파탐지용무선설비등그밖의업무용무선설비기술기준 ( 국립전파연구원고시제 호, , 일부개정및시행 ) 의각일부개정을통하여차세대지능형교통체계통신용주파수공급및기술기준이마련되어자율주행차통신용주파수 [5855~5925MHz] 공급할수있게됨 뿐만아니라과학기술정보통신부는자율주행차본격확산에대비하여 신고하지아니하고개설할수있는무선국용무선설비기술기준 ( 미래창조과학부고시제 호, , 일부개정및시행 ) 의개정을통하여자동차충돌방지레이다에여러개의안테나가활용될수있도록 76~77GHz 대역의안테나의공급전력기준을완화하여충돌방지레이다성능향상을위한기술기준을완화함 이외같이자율주행차와관련한법령등에있어서변화는있지만, 아직까지는그기술력에대한체감및현실이드러나지않은상황하에서논의가지속되고있는상황임 각고시를통하여개정되고있는부분도있기는하지만, 고시는강행성이부족한것으로참고해서업무를진행하기위한사항으로인식하여야할것이며, 그구체적이고명확한내용은심도깊은연구및논의를통하여법령등으로이어져야할것임나. UN 입법현황 도로교통에관한국제협약은 도로교통표시및신호에관한비엔나협약 (Vienna Convention on Road Signs and Signals) ( 이하 비엔나협약, 채택 ) 과 도로와차량교통에관한제네바협약 (Convention on Road Traffic) ( 이하 제네바협약, 채택 ) 이있음 두가지협약은교통규칙의표준화를통한도로교통의안전을목적으로하는점과규정내용이유사하나비엔나협약은주로유럽국가가가입해있고, 제네바협약은아메리카, 아프리카및아시아국가가주로가입함 우리나라의경우비엔나협약은 1969년 12월29일에서명후국회비준절차를발지않았으며제네바협약은 1971년 6월 14일서명이후국회의비준절차를밟아 1971년 7월 14일부터국내에서조약
36 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 제389호로발효됨 (1) 비엔나협약 [ 운전자요건, 운전자의주의의무 ] 비엔나협약은유럽에서의도로교통의발전을반영하여개정되고확대되었으나자율주행시스템을허용하지않는것으로해석하고있음 [ 자율주행을반영하기위한협약의개정 ] 프랑스, 독일, 이탈리아정부등은자율주행기술의상용화를실행하기위해인간운전자를전제한조항의개정을논의함 유엔유럽경제이사회 (UNECE: United Nations Economic Commission for Europe) 의도로교통안전실무그룹 (Working Party on Road Traffic Safety WP.1) 은 자동차의자율주행을허용하는내용의비엔나협약수정안에합의후 비엔나협약개정안제출및 에효력이발생함 [ 개정의의미 : 3단계및 4단계자율주행차의허용 ] 비엔나협약의개정에도불구여전히인간운전자의존재를요구하며운전자에의한제어, 즉운전자의주의의무를요구하는구조를취하고있음 3단계, 4단계자율주행차는비엔나협약의운전자요건을충족하여운전자가존재한다고보기때문에자율주행차를허용함 5단계자율주행차는차량내인간의존재를 탑승객 으로보고 운전자 가존재하지않는것으로보기때문에자율주행차의운행을금지함 협약개정에따라 3단계, 4단계자율주행차의운행허용하여자율주행차상용화를추진할법적기반을확보함 (2) 제네바협약 [ 운전자요건, 운전자의주의의무 ] 인간운전자에의한운전을전제하고제어권과주의의무를상세히규정하여자율주행시스템을이용한주행은허용되지않는것으로해석됨 [ 개정논의 ] 자율주행시스템을이용한주행을허용하기위해제네바협약의개정문제가제기로 개정안제출및 유엔유럽경제이사회 (UNECE : United Nations Economic Commission for Europe) 의도로교통안전실무그룹 (Working Party on Road Traffic Safety WP.1) 에제출하여개정절차를진행중임
37 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 [ 개정안의의미와한계 ] 자동차의운전자가조향장치나제어장치를조작하지않더라도안전한주행을가능하게하는시스템이국제적합의나국제적수준을충족하는경우허용함 주행시스템이국제적합의나수준에부합하지않더라도 운전자가시스템을통제하는것이가능한경우 그한도에서당해시스템을허용함 비엔나협약과마찬가지로 3,4단계에서일부허용하며 5단계에서는추가적개정이필요할것으로예상되어 운전자 의존재요건및운전자에의한 운전제어 요건의한계가존재함 그러나 자율주행시스템 을운전자로간주하는경우 운전자존재 요건및운전자의 운행제어 요건이충족되어 5단계에서개정없이충족가능함 (3) 우리나라에대한영향 [ 접근법 I: 인간운전자의존재를필요로하는독일식접근법 ] 제네바협약이개정되더라도여전히운전자존재요건및운전자의운행제어요건을충족하기위해운전자의존재를도출할필요가있음 독일처럼탑승자를운전자로의제하는경우 3,4단계는가능하나 5단계는추가개정이필요함 [ 접근법 II: 자율주행시스템을운전자로보는미시간식접근법 ] 제네바협약이요구하는 운전자 의존재와관련하여미국미시간주의경우처럼 자율주행시스템 을운전자로간주할경우운전자존재요건이충족되며 5단계까지추가개정없이운행제어요건을충족할수있음다. 미국 [ 미국에서자동차관련법규의관할구분 : 연방관할과주관할 ] 미국주정부는도로교통시 운전자 를규제하는도로교통법을관할, 연방정부는 자동차 를규제하는자동차법을관할함 연방차원에서처음으로자율주행차에대한연방법 (SELF DRIVE Act) 이발의및하원을통과함 - NHTSA는자율주행차제조사가자기인증해야할자율주행차의안전관리기준의제정필요성을시사하였음 - 자율자동차의센서구성이어느정도가되어야안전기준을충족시키는지여부등자율주행차에대한성능기준 (performance standard) 을결정해야함 [ 제네바협약의당사국으로서의미국의지위 ] 제네바협약의당사국으로협약이요구하는것처럼자동차에는 운전자 가있어야하고, 운전자 가 운행의제어권 을행사함
38 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 운전자 요건의충족없이자율주행차가자율주행기능을이용해공용도로를운행하는것은아직까지허용되지않으며법 개정이요구됨 제네바협약이개정될경우, 미국에서도 3단계혹은 4단계자율주행차의운행이허용가능해짐 [ 네바다주 ] 2011년자율주행차에대한최초의입법을통과하여자율주행차시험운행에관한법령 (NRS : Nevada Revised Statute, Chapter 482A Autonomous Vehicle) 및행정규칙 (NAC : Nevada Administrative Code, Chapter 482A Autonomous Vehicle) 을제정하여시행함 그러나사고책임과관련된입법인 자동차보험및재무적책임에관한법률 (Motor Vehicle Insurance and Financial Responsibility Act, NRS Chapter 485) 에서는아직까지자율주행차에대한별도규정없음 도로교통에관한법률 (Chapters 484A-484E) 에서운전중전화나문자를보내는등의행위를하는것을범죄로규정하였으나자율주행모드에서예외조항을마련함 (NRS 484B ) [ 캘리포니아주자동차법전 (CVC) 및관련규정 ] 자율주행차관련규정은 자동차법전 (Vehicle Code VEH) DIVISION (Article 38750) 에자율주행차의개념, 시험운행조건, 승인에필요사항등을규정함 자율주행차보급에관한세부규정 (Autonomous Vehicle Deployment Regulation, 이하 캘리포니아주자율주행자동차보급규정 ) 안을마련공청회진행중임 - 시험운행이후, 본격상용화이전단계에서제작사가준수하여야할사항및기존자율주행차시험운행규정에보급 (deployment) 에관한사항을추가함 - 사고발생시관련데이터경찰제출의무등이추가되었음 [ 애리조나주의시험규정규제 ] 주지사의행정명령으로자율주행차제조사가애리조나주에서행하는모든자율주행시험에대해행정기관이지원할것을명령하는행정명령을발의함 3단계이상자율주행기술의시험주행허용으로 운전자 요건에대한새로운해석과 원격운전 의허용함 구글에서애리조나주에서완전자율주행시범서비스를진행중이며, 이는애리조나주가시험주행에있어차량안에물리적으로운전자가착석할것을요구하지않기때문임 [ 미시간주의시험규정규제 ] 미시간주는 2016년자율주행차와관련된네개의개정법안 (Senate Bill(SB) No. 995, 996, 997, 998) 을통과시켜자율주행차의실험과사용, 판매등에관한입법체계를마련함 공용도로에서자율주행차의운행, 특히인간운전자가감독하지않는상태의자율주행을허용하는취
39 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 지로미시간주자동차법전 (Michigan Vehicle Code, MVC ) 을개정함 미국미시간의경우의회는자율주행시스템을작동시킨탑승자를운전자로보지않고, 자율주행시스템이작동하는동안에는자율주행시스템을운전자로간주함 인간운행자없이운행하는자율주행기술의공도에서의시험주행을허용하면서, 보험가입사실등안전의증명하도록함 호출형자율주행차네트워크 의운행허용하고 공공 호출형자율주행차네트워크 (SAVE project) 규정을도입하였으며, 자율주행시스템을개조함에따라발생한사고에대해서면책하는규정도도입함 자동차보험에관한법률 (The Insurance Code MCL 500, Chapter 31, Motor Vehicle Personal And Property Protection) 에는자율주행차와관련된개정은아직진행되지않음 [NHTSA의 Federal Automated Vehicles Policy] 자율주행차 (Highly Automated Vehicle) 와관련된정책과입법의방향을제시및각주별자율주행차제도의큰틀을제공하는 Federal Automated Vehicle Policy: Accelerating the Next Revolution In Roadway Safety ( 이하 Federal Policy ) 를발표 ( 자율주행차량에대한차량성능지침은아래 4개장으로구성 ) (i) Vehicle Performance Guidance for Automated Vehicles (ii) Model State Policy (iii) NHTSA's Current Regulatory Tools (iv) New Tools and Authorities [SELF DRIVE Act] 연방차원에서는 NHTSA의 Federal Automated Vehicle Policy를기초로한연방법이최근하원을통과함 상원에서도거의동일한내용의법안이소관상임위원회를통과하여본회의의결예정이며각법령을정부에이송하면최종적으로공포및실행될법률이결정될예정임 NHTSA에서 2016년 9월발간한정책서를기준으로하며, 주정부및연방정부의권한분장, 안전평가서의무화, 연방자동차안전기준, 사이버보안, 데이터프라이버시, 소비자교육, 자문위원회등의내용을담고있음 [NHTSA의 Automated Driving Systems: A Vision for Safety 2.0] 2016년발표한가이드라인을보완하여 2017년 9월, 새로운가이드라인을발표함 초안보다관련이해관계자및기업들로하여금안전성향상을위해자발적으로고려할안전가이드라인을제시하고있음 해당가이드라인은 SAE의자율주행차 3단계에서 5단계의차량을대상으로작성되었으며, 첫장에서
40 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 는 12개의주요항목을다루고있으며, 두번째장에서는연방및주정부의역할과관련한내용을다루고있음라. 독일 [ 비엔나협약의당사국으로서의독일의지위 : 운전자의존재와운전자의운행제어규제 ] 독일은비엔나협약의당사국으로서비엔나협약의구속받기때문에자동차에는 운전자 가있어야하고, 운전자 가 운행의제어권 을행사해야함 [ 비엔나협약의개정 ] 독일은자율주행차를상용화하여자율주행차분야의세계적선도가목표로자율주행기능을운전자가제어할수있는경우 운전자에의한제어요건 을충족시키는것으로간주하는내용의비엔나협약개정안을관철함 그결과비엔나협약의당사국들은여전히 운전자 요건은충족시켜야하지만, 운전자의운행제어요건은자율주행기능에의해충족하고있음 [ 독일도로교통법의개정 ] 2017년초자율주행차의운행을허용하는도로교통법 (StVG : Straßenver kehrsgesetz) 을개정하여시행예정임 자율주행차의시험주행에대한규제장치뿐만아니라상용화되어실생활에서운행될수있는자율주행차규제체제에대한유럽최초의법률적기반을마련함 [ 독일의공용도로에서의시험주행에대한규제 ] 도로교통법시행령 (Straßenverkehrs-Zulassungs-Ordnung, StVZO) 은제70조에서독일의각주 (Land, Bundeslander) 정부로하여금도로교통법시행령이부과한기술적요건으로부터일정한예외를인정할권리를인정함 각주정부는운전자가탑승하는것을조건으로하여시험목적으로공용도로에서차량이자율적운행을임시로허용함 [ 도로교통법개정과자율주행차의운행허용 ] 개정된도로교통법에서 고도의자율주행혹은완전자율주행기능 에의한자동차의운행을사상최초로허용함 - 고도의자율주행기능 은 SAE 기준 3단계, 완전한자율주행기능 은 4단계자율주행차로해석하고있음
41 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 [ 자율주행차의운행허용과자율주행차로인정받기위한요건 ] 도로교통법개정으로 3단계및 4단계자율주행차의운행이허용되며, 자율주행차로인정되기위한법적요건을규정함 [ 자율주행차운전의주체와책임의주체 ] 운전의주체 : 자율주행기능을사용중인경우, 누가 운전자 인가? - 인간에의한 운전 및운전자개념의유지하여자동차를제어하지않더라도 운전자 로간주하고있음 - 대안으로자율주행기능을제어하는자율주행차량을 운전자 로보거나, 자율주행장치를제조한제조업자를 운전자 로보는방안을고려해볼수있음 - 자율주행차의발전단계별 운전자 인정방안 : 3단계자율주행차에서의 운전자 개념을유지하였음 책임의주체 : 보유자책임 원칙, 운전자책임 원칙의유지함 - 사고책임에대해서현행 보유자책임 제도를유지함 - 운행자뿐만아니라운전자에대해서도책임을추궁하는현행법구조를유지하였음 ( 운전자책임 원칙유지 ) - 이러한경우 자율주행차의운전자가언제, 어떠한경우책임을지는가? 와같은문제발생함 [ 자율주행차 운전자 의권리와주의의무 ] 개정된도로교통법에서자동차의운전자로하여금주행중주행외의다른활동을할권리를인정함 자율주행차운전자의권리와그한계로 1) 자율주행차운전자의권리 : 주행외의다른활동을할권리, 2) 권리의한계 : 준비의무가수반된권리, 3) 3단계자율주행자운전자의준비의무, 4) 4단계자율주행차운전자의준비의무를들수있음 자율주행차가운전자에게제어권회복을요구하거나, 자율주행차의용법에따른사용요건이더이상존재하지않음을알았거나명백한제반사정을고려할때알았어야했던경우제어권회복의무가있음 [ 자율주행차의사고유형에따른운전자, 운행자, 제조자의책임의귀속 ] 사고유형 I( 운전자가제어권을갖는동안발생한사고 ) 에서는운전자로서책임을지게됨 사고유형 II( 자율주행기능의사용중의사고 ) 에서는운전자는주행과무관한일을할권리가있으며, 낮은수준의주의의무만베풀면면책됨 - 자율주행기능에의한운전중준비의무를다한경우, 주행시스템오류로인한사고에서면책됨 사고유형 III( 제어권의전환중에발생한사고 ) 에서는누가책임지는가에대해명시적으로언급하지않음 사고유형 IV( 차량의흠결로인한사고책임 ) 에서는제조사의제조물책임이일차적으로있으나운전자가용법과달리사용한경우제조사가면책될가능성이있음
42 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 [ 자율주행차에서의데이터처리와데이터의운전자면책에의사용 ] 제어권전환등에대한데이터의저장의무가있으며, 누가운전을하였는지식별이가능해야함 저장된데이터는사고또는손해발생시운전자가과실에기여하지않았음을판단하는지표로활용하여유책성을뒤집을수있는가능성을부여함 [ 자율주행데이터의제공 ] 법개정에따라위의저장된데이터는교통당국의요구시제공되어야함 저장된데이터가자율주행차와연루된교통사고와관련하여제3자의청구권의주장또는방어를위하여필요하고제3자의요구가있을때데이터를제공할필요가있음 [ 자율주행데이터의삭제등 ] 사고와관련이없는데이터는저장시점부터 6개월이후삭제되어야하나 6개월전에데이터를삭제한경우에대한제재는규정되지않음 사고관련데이터의저장기간은 3년이고, 3년후삭제함 데이터저장, 보안등에대한시행령의제정을통해저장의종류와방법, 저장장치의기술적디자인과위치, 저장의무자의주소, 자동차매각시불법접근을막기위한데이터보안조치등에관한상세한규율은유보함마. 영국 자율주행기술의실험및자율주행차의도입에있어선도적인국가가되기위해시험주행뿐만아니라상용화된자율주행차의운행을위한법제도의정비를서두르고있음 도로교통법의행정규제법부분보다는사고가난경우피해자의보상을위한사고책임을어떻게보험으로처리하는것이가장타당한가에초점을맞추고있음 [ 영국의공용도로에서의시험주행에대한규제 ] 실제도로에서의자율주행차실험이허용되는지에대해관심을갖고법률을검토하고있음 영국정부는시험단계에서의안전을확보하기위해시험주행을위한 Code of Practice의발간을포함하여일정한조치를취하고있음 [ 시험운전자의운전면허등 : 운전능력과주의의무 ] 시험운전자 (test driver) 는시험주행을실시하는차량을운전할수있는면허를소지할필요가있음 공용도로에서시험하려는자율주행기능의동작과작동방법등에대한추가적이해와훈련을받을의무가있음
43 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 [ 시험실시기관, 제조사의의무 ] 시험주행을실시하는기관혹은자율주행시스템을개발하는제조사는공용도로에서의시험주행을실시하는경우운전능력과주의를베풀수있는운전자만을선별하여시험주행에투입할의무와그에따른책임을부담함 [ 규제방식 : Code v Legal Regulation] Code of Practice 방식이덜형식적이고융통성이있어이러한방식을통해자율주행기술의시험과안전성을확보하는것이영국이자율주행기술의선도적지위를유지하는데도움이된다고판단하고있음 [Code of Practice for testing] 자율주행차의시험주행에서의안전을확보하고준수해야할명시적기준을제정하기위해 Code of Practice를발행하기로선언및 에발의함 제정법이아니지만, 책임있는시험주행을촉진하기위하여제정되었으며 Code를준수하지않는경우과실을추정함 [Vehicle Technologies and Aviation Bill의제정과자율주행차의운행허용 ] Vehicle Technology and Aviation Bill(HC Bill 143) 법안이논의중이며 (i) 자율주행차의사고와관련된책임과보험에관한부분외에 (ii) 전기차의충천과충전소에대한규제및 (iii) 항공법에대한규제부분을다루고있음 [ 영국의자율주행차입법안의특징 ] 자율주행차사고의경우에도 피해자의보상 을가장우선으로하며, 기존법체계를유지하면서보험자의역할과책임을확대강화함 [ 교통부장관의자율주행차명부작성, 유지, 공표의무및자율주행차의정의 ] 장관의자율주행차명부작성, 유지, 및공표의무를갖고있으며차량의명부작성및식별을명시함 자율주행차의정의로명부에등재된차량을기준으로하며 3단계, 4단계, 5단계자율주행기술을포섭하고있음 자율주행차사고에대한보험자의 1차적책임을개설하였으며 1) 사고가자율주행차에의해스스로운전할때야기되고, 2) 사고당시자율주행차가법정책임보험에가입해있고, 3) 사고의결과피보험자혹은다른사람이손해를입은경우무조건피해자에책임을짐 보험자의사고책임자에대한구상권을개설하였으며자율주행차사고의피해자에대한일차적배상은보험사이고보험사가별도의구상을할수있게함
44 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 바. 일본 [ 제네바협약의당사국으로서의일본의지위 ] 일본은우리나라, 미국과마찬가지로제내바협약당사국으로해당협약의구속을받음 운전자및운행제어요건에 원격으로조정 하는경우에도운행제어를하는것으로보며 원격형자동운전시스템의공도실증실험에관련한도로사용허가신청에대한취급기준 에명시하고있음 일본은독일과마찬가지로인간운전자를여전히요구하며실증시험하는경우테스트드라이버를두도록함 [ 일본의자율주행차로드맵 ] 고도정보통신네트워크사회추진전략본부 ( 약칭 IT종합전략본부 ) 를설치하고 부터 3차례의 관민ITS 구상 로드맵 ( 이하 자율주행로드맵 이라고한다 ) 을발표, 이후 에 4번째로자율주행로드맵을발표함 [ 로드맵의개요 ] 자율주행로드맵에서는자가용차, 물류서비스, 이동서비스로나누어서 2025년까지의고도자동운전실현을향한시나리오를마련함 2020년상용화를위해교통관련법규의재검토를위한제도전체의제도정비대강을 2017년도를목표로책정함 고도자동운전에필수적인인공지능기술력의강화등을위한데이터전략을포함하고있음 [ 일본의자율주행차의규제를위한법령제정여부 ] 현재행정청의가이드라인에의한규제를시행하고있으며아직까지자율주행차와관련된입법은없음 2016년도경찰청발표가이드라인및 2017년취급기준은행정청의규제가이드라인일뿐법적효력이없음 [ 시험주행에대한규제 I: 자동주행시스템에관한공도실증실험을위한가이드라인 ] 자동주행시스템을이용해서자동차를주행시키는실증시험을실시함에있어서교통의안전과원활함을도모한다는관점에서유의해야할사항등을알림으로써적정하고안전한공도실증실험의실시에이바지할것을목적으로 2016년 5월경찰청에의해마련됨 해당가이드라인을따르지않는경우실험금지는아니며관계법령과자동주행시스템에관한공도실증실험에대한조사검토결과에입각해서공도실증실험을수행하거나수행하려고하는자에게지원하려는것을의도함 공도실증실험의내용등에따른안전확보조치, 테스트드라이버의요건, 테스트드라이버에관련된자동주행시스템의요건, 공도실증실험중의실험차량에관련한각종데이터등의기록 보존, 교통사고의조치등의내용을담고있음
45 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 [ 시험주행에대한규제Ⅱ: 원격형 자동운전시스템의공도실증실험도로사용허가신청취급기준 ] 원격조작에의한자동운전차량의공도실험을실시하는경우의기준 을마련하여발표함 취급기준에서는자동차로부터떨어져진행하는원격형자동운전시스템의공도실증실험에대해도로교통법제77조에규정하는도로사용허가의대상행위로하여전국에서실험주체가도로사용허가를받아서실시하고있음 허가에관한심사기준, 허가기간, 허가에부가되는조건, 허가에관련한지도사항을명시하고있음사. 시사점 현행법상으로자율주행차에대해서는아직까지완전한정의가내려져있지않고있으며이에대한논의는당분간지속될것으로보임 뿐만아니라현재까지이루어진입법은바로직면하는자율주행차를보듬을수없는상황을부정할수는없으며, 그외의자율주행차와관련한다른법의경우도상용화등에대한대비의관점에서그입법이아직까지는미비한것으로보임 그러나상용화는눈앞에예정하는상황에놓여있고이에대한대비는반드시속도감있게논의되어야할것임이분명한상황적현실을인식할필요가있음 현재로선각국의발목을잡고있는국제협약의개정을지켜보며진행하여야하는현실이존재하기에단순히국내법만을개정해버리면되는상황만은아니며그논의가깊이있고충분해야함은반드시지켜져야할것임 따라서자율주행차의운행체계구축을위한논의및운전면허에대한논의야말로자율주행차의운행에대한기본적인것이며반드시필요한사항임 자율주행차운전면허발급및면허관리체계가. 자율주행운전면허제도의필요성 자율주행레벨이 2나 3의경우운전자에게운전의부담을줄이고안전성을제고할수있으나이에따른시스템이해에대한책임이추가될필요가있음 - 특히자율주행의사고사례에서보는바와같이자동에서수동운전으로전환이요구될때이를수행할수있는요소가향후운전면허제도에포함되어야할것으로예상됨 자율주행레벨 4 이상의경우운전자에대해요구되는운전능력이감소할수있는반면에자동차제조사에대해서운전능력을검증하고운전면허제도로서제조사및공인기관의검증을요구할수있음 특히다양한환경및시나리오에대한자동차관리법및도로교통법준수여부등이자율주행운전면허제도관점에서검토될필요가있음
 를하느냐또는그렇지않으냐임 운전자가항상전방주시를하지않는 3단계에서는자율주행차가운전자대신의전방주시를하고있으며차량의 ODD를벗어나는시점에운전자에서경고및수동주행유도를함")
46 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 나. 레벨 2단계및 3단계주요평가요소및기준정의 2단계의주요평가요소는자율주행차의기능에대한평가를위한요소들을선정하였음 그림과같이 2단계와 3단계자율주행차의가장큰차이점은운전자가항상전방주시 ( 환경에대한인지 ) 를하느냐또는그렇지않으냐임 운전자가항상전방주시를하지않는 3단계에서는자율주행차가운전자대신의전방주시를하고있으며차량의 ODD를벗어나는시점에운전자에서경고및수동주행유도를함 이때운전자가주어진시간 ( 자율주행차의한계시점 ) 내에수동주행으로복귀함 즉, 2단계에서는평가가불가능한운행적요소에대한평가가이루어져야하며가장먼저필요한평가요소는 OEDR임 자율주행차가전방주시를할수있는범위에대한평가요소가필요하며, 이는 3장에서처럼일반주행능력과회피주행능력으로구분해서요소로정의함 다음으로는제어권전환에대한평가요소가필요하며언제제어권요구를요청하는지, 경고알림의형태, 전환시간등을평가요소로정의함 < 그림 3-5> 레벨 2 와레벨 3 자율주행차의차이점 먼저 OEDR의일반주행능력은 3장에서 21가지의상황을제시하고있는데이를다시재분류를하면 4가지의능력으로구분할수있으며이는표와같이구분할수있음 - 구분기준은인지및대응에대한대상을도로, 차량, 신호및표지판, 임시및기타장애물로구분 자율주행차마다제시되는 OEDR은 ODD의범위내에서이루어지고따라서 2단계의평가요소들도함께제고가되어야함 다음으로는 OEDR의충돌회피능력에대한평가요소를정의하고자하며, 충돌회피능력은일반주행능력
47 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 의평가요소의예시중에사고위험이있는경우 (ex. 도로위정지차량, 공사현장등 ) 에자율주행차량 이인지하고대응이가능한지, 불가능한상황에서는언제, 어떻게운전자에게제어권전환알림및전 환을하는지를평가요소로정의하고자함 < 표 3-5> 3 단계자율주행차의주요평가요소 구분 주행가능영역감지및주행 주변차량인지및대응 교통신호및표지판인지및대응 예기치못한상황인지및대응 충돌회피능력 제어권전환알림 제어권전환시점 내용 고속분기점, 합류점에서의주행 저속분기점, 합류점에서의주행 가변차로및주차장이탈 통과가능및통과불가능영역구분및주행 회전교차로에서의주행 교차로탐색및선회 ( 좌회전, 우회전 ) 차량추종주행 정지차량인지및대응 차선변경인지및대응 정지장애물인지및대응 마주오는차량감지및대응 교통신호감지및정지, 양보표지판인지 교통신호감지및정지, 양보표지판대응 접근제한감지 ( 일방통행, 회전금지등 ) 예기치못한공사현장감지및대응 임시교통신호에대한감지및대응 수신호에의한교통통제 ( 경찰, 공사구역근로자 ) 사고후사고당사자들의의한교통유도 응급차량감지및대응 OEDR 범위내의사고위험이있는경우 ODD를벗어나는상황 OEDR을벗어나는상황 알림의방법및종류 제어권전환요청시점 제어권전환의시간 제어권전환요청시전환을받지않은경우 3단계자율주행차의평가기준은 2단계와마찬가지로운전자관점의평가기준과차량관점에서평가기준으로구분하며, 먼저자율주행차의경우에는 2단계의평가기준과마찬가지로 ODD와 OEDR에대한범위와내용을매뉴얼과차량의거동의일치하는정도로평가할수있음 2단계와구분이되는요소로는제어권전환알림이며그림 7과같이알림의종류가다양해짐으로이를매뉴얼에제시하여야함 또한, 경고알림을주는시점에서의경고메시지, 주변환경, 차량의거동을동시에평가하여야하며평가기준으로는매뉴얼과의일치도를사용함 또한, 제어권전환요청이있을경우운전자가제어권을요청받지못하는상황을마주하였을때, 기능

48 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 이꺼지는지, 차량이정지하는지등의제어권전환실패상황에대한전략도매뉴얼에명시필요 운전자의경우에는 OEDR의범위즉, 자율주행차의인지및대응에대한범위를숙지하고있어야하며, 2단계와는다르게충돌회피능력에대한숙지는조작법과자율주행차의한계를숙지하는것이아닌소유한자율주행차가어떻게거동하는지를이해하여야함 - 자율주행차가충돌위험이있을경우자신이생각하는것과다른형태로거동을해도주행에는이상이없다는것을운전자가인지할수있음 3단계주요평가요소중제어권에관련된요소들은숙지뿐만이아니라조작능력에대한평가가이루어져야하며, 제어권알림요청이있을경우운전자가얼마나빠른시간내에제어권을넘겨받는지, 즉, 알림에대한대응에대한평가를하여야함 기준으로는자율주행차마다제시되는주어진시간내에운전자가제어권을받는지를평가하고자함 < 그림 3-6> Cadillac CT6 경고알림의종류 다. 4단계주요평가요소및기준정의 fallback 전략시고려사항 - fallback 전략은일반적으로차량을현재주행경로내에정지시키는것을수반하지만, 차선에서차량을이탈시키도록설계된보다광범위한기동에도적용될수있음 - 도로에서의비상정지는도로의형상, 정체유무, 보행자, 제한된상황의시야등으로인해매우위험할수있으며, 일반도로에서의비상정지시도는매우위험한것이므로금지또는마지막으로고려해야될사항임 fallback 전략준수여부확인 - 4단계이상의자율주행차의주행과정에일어나는모든이벤트는기록및저장되며, 이를이용하여자율주행차의운행중일어나는모든사고데이터에대한접근및분석이용이해지고, 그에따라사고유발에대한과실유무평가가가능해짐 - 기본적으로자율주행차는차자체의고장 ( 환경인지감소, 제어불량등 ) 에대한모니터링과외부

49 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 환경으로인한주행불가능시, 운전자와주변주행환경안전을위한자체 fallback 전략을수행하게되고, 안전을위한최소한의행동을수행하게되어만약, 자율주행차의기존에설정된 fallback 전략이제대로수행되지않을시, 더큰사고를야기시킬수있음 - 그러므로자율주행차가주행능력을상실한경우, 설정된 fallback 전략또는운전자에게제어권전환이원활하게이루어져야함 - fallback 기능을또한자율주행차의여러가지운전요소중의하나로, fallback 전략도하나의주행기능으로서성능평가가가능하며, 이는제작사의 fallback 시나리오를바탕으로자율주행이 fail된상황에서제시된시나리오와동일기능을수행하는지에대한평가로서진행될수있음 - 마지막으로, 자율주행차에의해유발된사고또는사고피해등으로인한발생된사고시점의데이터분석을통해자율주행차의 fallback 시나리오수행과나아가제어권전환이원활이이루어졌는지에대한후속조치등으로교통사고의과실평가 ( 운전자또는차량 ) 를할수있을것임 - 앞서언급한바와같이제작사가취할수있는 fallback 전략은자율주행차가지원하는자율주행기능별, 상황별또는안전목표에따라다를수있음 - 여기서는주행오류발생빈도에따른 fallback 전략의예제와위험최소화를위한예제를참조로설명함 - < 그림 3-7> 은각상황별오류발생원인및발생빈도에따른 fallback 전략으로서 Handover to Driver, Degraded Mode Driving, Autopilot safe stop, Blind safe stop에대한고장원인과결과에대한설명을보여주고있음 < 그림 3-7> 주행오류발생빈도에의한 fallback 전략블록도 임베디드시스템에서의안전성메카니즘 - 안전성관련시스템에서는, 특히자동차의일부시스템이고장나더라도제동및조향과스티어링을보장해야하며, 시스템고장을방지하거나최소화하기위해일반적인접근법은위험을최소화하는것임
 를인식함 - 오류방지시스템에서는일시적인장애가발생한경우, 시스템이정지되었다가다시시작됨 - fail operational : 고장발생시 fail-operational 시스템을종료하면안전을보장할수없으므로위험한시스템동작이발생함대체및안전한실행을위해추가적인고장허용대책이필요함")
50 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 - 위험최소화를위한대안적인접근법은안전정지또는높은고장내성을가진개선된제어를구현하며, fail silent 또는 fail safe 시스템에는안전정지가적용되며, fail operational은높은고장허용오차를요구함 - fail safe : 오류방지시나리오에서는탐지불가능한고장이발생할경우 safe system 상태로전환되어야하며, 이시스템은두개의서로다른상태 ( 어플리케이션이실행되지않았거나중단된상태 ) 를인식함 - 오류방지시스템에서는일시적인장애가발생한경우, 시스템이정지되었다가다시시작됨 - fail operational : 고장발생시 fail-operational 시스템을종료하면안전을보장할수없으므로위험한시스템동작이발생함대체및안전한실행을위해추가적인고장허용대책이필요함 fail-operational 동작은설계의다양성또는설계의중복성을이용하여해결할수있음 < 그림 3-8> 위험최소화를위한 fallback 전략블록도 ( 출처 : AUDI) 라. 공통평가요소 시스템안전성 : 자율주행차가안전성위험이없는시스템을목표로시스템공학에근거하여강인한설계와유효처리과정에따라야함 이과정은자율주행차가전기, 전자나기계적고장, 소프트웨어오류에도안전한곳으로정차되는것처럼의도된기능을디자인하는것을포함함 소프트웨어개발과정은소프트웨어개발과변화로예상하지못한결과를감지하고고치기위해잘계획하고, 통제되고, 기록되어야함 소프트웨어테스트는철저히기록하여구조화하고기록된소프트웨어를통해개발과정을보완하여야함 차량사이버보안 : 자율주행차안전에대한위험을최소화하기위해사이버보안위협과취약성을포함한, 위협을최소화하기위해강력한개발프로세스를따라야함 이프로세스는통합된시스템에대한체계적이고지속적인안전위험평가를포함되어야하며, 식별, 보호, 감지, 응답및복구기능은위험관리결정, 위험요소및위협을가능케하고사이버보안이벤트에서신속하게대응하고학습할수있도록해야함
51 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 휴먼머신인터페이스 : 자동차와운전자사이의상호작용은항상자동차설계과정에서중요한역할을해왔으며자율주행차가운전기능을수행함에따라운전자의의도와자율주행차의퍼포먼스를명확하게전달되어야하기때문에새로운복잡성이추가되었음 최소한의자율주행시스템지표들은운전자나탑승자에게다음사항들을알릴수있어야함 - 정상작동중 - 현재자율주행주행모드중 - 현재자율주행모드 사용불가능 - 자율주행시스템이오작동중 - 자율주행시스템에서운전자에게로제어권전한요청 충돌후행동 : 자율주행차가사고가난이후어떻게원상태로회복되었는지에대한평가, 시험및검증을위한문서화된프로세스구축, 센서또는컨트롤시스템이손상된경우에차가자율주행모드에서작동하도록되서는안되며문제가진단될때, 적절하게정비될때까지최소한의위험상태를유지해야함 데이터기록과공유 : 자율주행차는테스트, 평가, 이벤트수집을위한데이터기록단계를가지고있어야하고사건그리고충돌데이터들은기능고장, 저하또는그외고장이슈발생을기록하기위한단계를가지고있어야하며, 데이터는테스트와작동 ( 사고재구성포함 ) 목적둘다수집되어야함 차량은최소시스템의사건과성능에관련된모든정보를그사건의환경이재구성될수있도록기록되며, 이데이터는자율주행시스템의상태, 그리고자율주행이나운전자가차량을조작하고있었는지에대한정보를포함하여야함 자율주행차기술이계단식개발이진행되는것을감안할때각각의기능별로자동운전을평가하는것이합리적이며즉, 자동주행이제공되는시나리오를별도로평가를해야함 이를통해소비자는동일한운전상황에서한자율주행차의결과를다른자율주행차의결과와비교하고올바른시스템사용을보장할수있으며, 일정정도의지원또는자동화기능이제공되거나곧제공될것으로예상되는케이스들은아래와같음 (1) Parking (2) Traffic Jam (3) Highway Driving 첫번째로 Parking에대한기능은아래와같음 - 주차장을탐색하고주차공간찾기 - 주차공간에대한주차성능 - 주-출차시장애물탐지능력

52 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 < 그림 3-9> 주 - 출차시장애물탐지예 두번째로 Traffic Jam의기능은아래와같음 - 교통정치및정지 / 양보표지감지 - 비상차량감지및대응 - 교통혼잡지역에서의정지및출발 세번째로 Highway Driving의기능은아래와같음 - 고속및저속합류성능 - 속도제한변경감지및대응 - 추월및비추월지역기동성능 - 차선변경에대한감지및대응 앞으로는개별기능의평가를결합하여 자율주행 등급을부여할수있음, 이것들은상대적안전성, 관련성에의해개별기능의결과를평가할것임 자율주행차의기술범위, 능력이각기능에따라다르므로, 자율주행차운행중운전자의높은수준의안전성을보장하기위한시험및검증방법을개발해야함 성능검증은자율주행차가정상적인운전중에나타날것으로예상되는시스템의행동능력성능을검증해야하며이때, 자율주행차의충돌회피상황, 최소위험상태전환등을기록해야함 자율주행차의성능을검증하기위해, 시뮬레이션, 테스트트랙등을포함하여, 이러한모든상황은자율주행시스템에서데이터기록및저장이이루어져야하고, 사고발생시기록된데이터와 fallback 전략이적절히이루어졌는지분석 / 판단후사고과실평가가이루어져야함 자율주행차의다양한행동능력에대한평가, 시험및검증을위한프로세스를가져야함 - 자율주행차의행동능력이란, 차가차선을따라주행하고, 교통법규를준수하며, 차또는사람에대
53 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 한일반적인교통사고에대응하는후속조치를취하는등주행시일반적으로접할수있는교통상황에서자동화된차의행동능력을말함마. 운전면허제도의단계별구성체계 2단계운전면허제도전략 : 2단계자율주행차주요평가요소와그평가기준을정의하였고, 자율주행차의단계별로운전면허제도에대한전략을제시하고자함 먼저 2단계평가요소는기능적요소이며이는운전자의숙지여부및자율주행차의기능과매뉴얼과의일치도로요약할수있으며이를위한전략제안이필요함 첫번째로는자동차보험사와자동차제조사와의연계를통하여자율주행차의기능숙지를의무화하고이를이수한자에게보험료할인과같은인센티브를부여 두번째로는사전교육이나재교육을위한대표시나리오도출을제안하고자하며, 이는즉, 자율주행을통해서예방할수있는시나리오나자율주행시대응을할수없는교통사고시나리오에대한분석이선행되어야하며이를기반으로사전교육이나재교육과정이설계될필요가있음 3단계운전면허제도전략 : 가상환경기반운전면허평가, 현재운전면허제도는크게필기와실기시험으로구분할수있으며실기시험은장내기능시험과도로주행시험으로구분할수있으나, 3단계자율주행차의평가요소는실제기능조작에대한평가가필요하며현재운전면허제도의시험방법으로는평가어려움 즉, 기존운전면허실기시험에서는사고위험이높은상황이나센서가오작동하는상황등비정상적인상황에대한대응능력을고려하고있지않기에이러한상황에대한연습이나경험을축적하기가쉽지않음 특히, 제어권전환에대한평가는경고가발생하는즉, 돌발상황 ( 보행자출현, 선행차량급제동, 차선의변화등 ) 에서의평가이루어져야하기때문에실제차량으로평가하기에는시나리오도다양하며, 재현하기에는사고의위험도높아짐 따라서위에서언급한도출된시나리오를기반으로가상시뮬레이션기반의안전교육을통해서운전자들이예기치못한돌발상황에서도잘대처할수있는능력을갖추도록하고자함 2단계운전면허제도전략에서제안한사망사고데이터를분석하여전문가의견뿐만아니라데이터분석을통하여대표시나리오를도출하고도출한시나리오를가상시뮬레이터기반의시뮬레이션을통해서 3단계자율주행차의운전자시험을제안하고자함 최초 3단계자율주행양산차인 AUDI A8의 HMI이며이처럼실제와유사한 HMI를구성하고, 실제경고알림시스템으로모사하여운전자의위화감을최소화시켜시뮬레이션기반의시험도실제차량을운전과비슷하게느끼도록해야함


54 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 < 그림 3-10> Audi A8 의인터페이스 아래 < 그림 3-11> 은운전자의제어권전환능력을평가하는가상환경기반시뮬레이터와 HMI 를예 제로보여주고있음 < 그림 3-11> 실제주행영상기반시뮬레이터및 HMI 예상도 좀더구체적으로설명을하면처음에는차량이전방주시를하며운전자는영화를보고있는상황으로가정하고주행환경이하는영화를보여줌 이후임의로제어권전환을요청하며영화화면이꺼지고실제주행환경으로화면을전환함 - 이때운전자는주어진시간내로핸들을조작하고, 주행환경에맞추어주행을해야함 가상환경기반시뮬레이터의주행데이터를기반으로실제경고가울린시점과운전자가복귀한시점을비교하여두시점의차이를통해운전자의주행능력을평가함
55 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 이때주행환경은실제상황과유사한환경으로구성하여야하며위에서언급하였던교통사고를기반으로도출된시나리오로선정함 실제빈도수높은교통사고들에대해운전자의주행능력을평가한다면합격한운전자들의높은수준의자율주행차운행능력을기대할수있음 4단계운전면허제도전략 : 자율주행운전면허제자율주행차에대해일정수준의도로교통법상운전자준수사항을평가하고그결과에따라운전면허를부여하도록함 - 현재수행하고있는자동차정기검사와같이일정기간을두어시행하고, 시험 / 평가내용으로자율주행의기능수행후, 통과요건을맞추면운전면허를갱신하도록함 < 표 3-6> 현행자동차정기검사와자율주행시스템운전면허갱신제도예 구분 정기검사 자율주행시스템운전면허갱신 비사업용승용자동차및파견인자동차 2년 ( 최초신차 4년 ) 1년 사업용승용자동차 1년 ( 최초신차 1년 ) 1년 경형, 소형의승합및화물자동차 1년 1년 사업용대형 차령이 2년이하인경우 1년 6개월 화물자동차 차령이 2년이상인경우 6개월 6개월 그밖의자동차 차령이 5년이하인경우 1년 6개월차령이 5년이상인경우 6개월 6개월 자율주행차및자율주행시스템의운행허가및정기검사의시행및자율주행운전면허시험제도프로세스를구축할수있도록관련연구가필요함바. 자동평가시스템구축 자율주행차가모든사고시나리오를완벽하게회피하는것은불가능함 - 자율주행차가사고가발생하면수개월동안사고원인을조사할것이고, 가령사람이운전하는차량에책임이있다고하더라도, 자율주행차의주행불감증은대중의이목을이끌것임 이것에대한해결방안으로사고및결함에대한수학적모델에기초하여명확한규칙을설정할필요가있음 - 수학적모델에대한규칙이결정되면사고조사기간이줄어들게되고, 사실을기반으로하여책임 ( 자율주행차또는운전자 ) 은명확하게결정됨 - 이러한해결방안은대중의자율주행차에대한대중의신뢰도를향상시킬것으로보임 이러한해결방안에대한접근방식은운전시나리오, 우선순위의개념, 길, 방향, 속도거리등을포함하는방정식을공식화하여결함을결정하기위한수학적모델로나타냄 결함에대한공식화된모델은자율주행차로인한사고를피할수있는의사결정소프트웨어를만들수있으며, 또한효율적인방법으로유효성검사를수행할수있음
56 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 이렇게설계된시스템을 Responsibility Sensitive Safety (RSS) 라하고, RSS는계획및의사결정을통해자율주행차가사고를유발할수있는명령을보내지않도록함 RSS 시스템이완성되면기존에도로나시뮬레이션환경에서수행되던데이터집약적인자율주행차검증과정을피할수있게되고, 시스템이미리결정된일련의수학적규칙에대해모든명령을평가한다는것을증명함으로서간단히자율주행시스템을평가할수있음사. 자동차보험책정정책등과의연계 5단계자율주행차의상용화전까지는기술적한계가존재하고이에대한충분한숙지가필요함 - 특히 2단계의자율주행차의경우에는제한된환경에서만사용할수있는기능들이많은데충분한이해가없이기능을맹신하고사용하면큰사고로이어질수있음 사전교육은사전교육자료, 시험및평가, 자동차보험을통한인센티브와같이크게 3가지로구성될수있음 - 우선사전교육자료는자동차제조사마다기능과한계점이다다르기때문에해당자동차제조사에서제공하여야함 - 교육자료는인터넷동영상강의 (MOOC) 형태로운전자가쉽게하고효율적으로교육을받을수있도록함 다음으로실험및평가를위해서우선자동차제조사에서사전교육자료와연관된문제은행을제공해야함 - 이문제은행을기반으로온라인사전교육및시험출제를통해운전자들의기능숙지를위한사전교육을실시하고, 이시험을통과한운전자에게는사전교육인증서등과같이시험을통과하였다는증서를제공함 마지막으로자동차보험을통하여사전교육의인센티브를제공하는전략을제안하고자함 - 현재에도 ADAS 시스템을장착한차량은최대 13% 의보험료할인효과를얻고있음 - ADAS 시스템을가진차량에서실제할인을추진하고있음 이러한자동차보험할인프로그램을사전교육과연계하여자율주행차를운행하는운전자들이자발적으로사전교육을이수할수있도록시스템을구축함 - 위에서언급한시험및평가단계의교육증서를할인프로그램에적용받기위한조건으로채택한다면체계적으로사전교육을받는방향으로유도가가능할것으로예상 자동차보험책정정책과의연계는보험사-자동차제조사등과의연계를통하여사전교육제도를구축하고이를의무화시켜자율주행차를운행시안전성을확보하고자하는전략임 인증서를위한시험의형태또한접근성이좋은온라인평가를통해서많은운전자가이교육제도를통해혜택을받도록유도하고자함
57 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 아. 대상별운전면허평가의다양화 최근들어서고령운전자의사고가급증하고있으며화물운송등과같은사업용차량에의한대형사고를예방하고자적성검사나운전면허갱신주기조정, 또는운전자교통안전교육의무화검토 하지만고령운전자가자율주행차를이용하는경우일반운전자의운전능력에준하여주행을할수있으며이를고려한새로운운전면허제도가필요하기때문에고령운전자또는사업용고령운전자를위한새로운형태의운전면허제도제시가필요함 먼저, 고령운전자를대상으로하는신체검사가필요함 - 현재운전면허갱신때는단순시력및색약검사를시행하고있음 - 현재여객자동차운수사업법개정안에의하면 65세이상버스운전자대상 7종 ( 시야각검사, 신호등검사, 화살표검사, 도로찾기검사, 표지판검사, 추적검사, 복합기능검사 ) 의자격유지검사를시행 이를버스운전자들뿐만아니라일반고령운전자에게도확대해서적용하는방안검토필요함 - 고령운전자의반응속도는 20대운전자에비해평균 0.7초정도늦고, 복합기능검사를실시하였을때휴대전화로문자를보내는 20대운전자보다점수가낮게나온연구결과있음 ( 출처 : 삼성교통안전문화연구소 ) 이는고령운전자의운전능력저하를보여주는대표적인사례라고볼수있으며적지않은고령운전자들이자격유지검사를통과를하지못할수도있을것으로예상 하지만운전을이미오래한고령의운전자들에게면허증을반납시키는것과같이이동의자유를제한할수밖에없지만이러한경우에대해서자율주행차의도움을받아서안전하게운전할수있다면특별한면허를발급 현재운전자가소지하는면허증을보면 조건 이라는항목이존재하며, 이항목은현재운전자가소유한차량혹은면허를취득할때도움을받는보조장치의종류를의미하며종류는 (1) 자동변속기, (2) 의수, (3) 의족, (4) 보청기, (5) 청각장애인표지및볼록거울, (6) 수동제동기ㆍ가속기, (7) 특수제작ㆍ승인차, (8) 우측방향지시기, (9) 왼쪽엑셀러레이터, (10) 다륜형원동기장치자전거임 이미중증장애인등과같이일반차량으로는운전이힘든운전자들도여러장치들의도움으로운전면허를취득하고있음 이와같이 3단계이상의자율주행차의기능의도움을받는운전자는조건항목에도움을받는기능을기재하여운전면허를취득할수있게하고자함 이를위해제안하는전략은연령별맞춤형운전자적성검사전략임 - 야간시력, 동체시력, 위기판단능력등의항목포함하거나세분화시켜서운전자신체능력평가 적성검사미통과자들중전반적인능력이부족한운전자가아닌일부능력저하를보인운전자들에대해자율주행차의시스템과매칭이되는경우자율주행차를이용하여일반운전자에준하는주행이가능하도록할필요있음

 로인한자율주행을할수없는상황이발생할경우존재함 - 즉각운전자에게제어권전환이이루어지거나, 운전자의제어권전환거부시설정된최소위험전략 ( 긴급정지, 우측차선변경후갓길정지등 )")
58 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 자. 교통사고분석을통한운전자및차량의과실평가 4단계이상주요평가요소중하나인데이터기록및공유를이용하여자율주행차의과실여부를판단및평가함 자율주행차가차선을따라주행하고, 교통법규를준수하며, 차또는사람에대한일반적인교통사고에대응하는후속조치를취하는등주행시일반적으로접할수있는교통상황에서자동화된차의행동능력을이야기하며이를평가하고검증함 자율주행차에서사고감지및또는자율주행시스템의오류 ( 센서인지, 주행제어등 ) 로인한자율주행을할수없는상황이발생할경우존재함 - 즉각운전자에게제어권전환이이루어지거나, 운전자의제어권전환거부시설정된최소위험전략 ( 긴급정지, 우측차선변경후갓길정지등 ) 이선행되어야자율주행차의다양한행동능력에대한평가, 시험및검증을위한프로세스를가져야함 < 그림 3-12> 제어권이양을위한자율주행차량의체계적 HMI 기법연구 < 그림 3-13> 제어권전환안전성평가기술및사회적수용성연구
 현재교통사고상황별통일되고구조화된경찰공무원의현장지시및통제와관련한매뉴얼이없으며일부일선경찰청별로자체매뉴얼을배부한사례가있음 자율주행차에의한사고발생 교통통제 ( 구호조치 ) 사고조사 ( 현장보존 ) 회복절차를거침 최근에는미국특허청에구글이자전거주행자의수신호를감지할수있는특허를등록했음 < 그림 3-14> 구글특허예시 -")
59 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 자율주행차교통경찰현장지시및통제 ( 현황 ) 현재교통사고상황별통일되고구조화된경찰공무원의현장지시및통제와관련한매뉴얼이없으며일부일선경찰청별로자체매뉴얼을배부한사례가있음 자율주행차에의한사고발생 교통통제 ( 구호조치 ) 사고조사 ( 현장보존 ) 회복절차를거침 최근에는미국특허청에구글이자전거주행자의수신호를감지할수있는특허를등록했음 < 그림 3-14> 구글특허예시 - 구글에따르면자율주행차의여러개의센서와자체알고리즘분석을통해자전거주행자의수신호를감지하고자율주행차가자전거주행자의안전을위해스스로속도를줄일수있다는내용을담고있으며, 이러한구글의특허는자율주행차사고예방에큰도움이될것으로전망함 - 자율주행차량도사람을인식하는것을뛰어넘어사람의행동을분석하고이에대한의미를인식함으로써올바른대처를할수있을것으로기대됨 자율주행에영향을미치는비정형동적특성인지오픈데이터셋및인지처리기술개발 은영상으로부터특정대상을검출하여위치정보를알아내고행동을인지하는기술임 < 그림 3-15> 교통경찰인식영상
60 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 - 자율주행차는도로상에서교통흐름에중요한역할을담당하는경찰관이나안전요원의수신호를인지하고적절한행동을취해야함 - 기존에인지대상범위를넓혀경찰관및안전요원의수신호를인지하고이를분석하여감속 / 정지또는수신호에알맞은행동을취해야함 - 비정형화된동적특성영상및이미지를활용하여딥러닝알고리즘을통해인지처리기술개발이필요함 - 하지만, 경찰관이나안전요원이아닌일반인의수신호는따르지않아야하며, 자율주행차가도로교통법을위반하는등의경우경찰관이단속을위해비상정지명령을따라야할필요가있음 자율주행차의기능을불법으로개조하는것에대한단속도필요함 - 현재도법적으로허가된범위를넘어서는개조에대해단속이이루어지고는있지만, 자율주행차의경우는구조나장치의일부를변경하거나자동차에부착물을추가하는것은안전운전을위협을가하는요소로작용할가능성이높음 자율주행차교통사고처리 ( 현황 ) 현재경찰청훈령제 860 호 교통사고조사규칙 에의하면교통사고처리절차는아래그림과같음 < 그림 3-16> 교통사고처리절차
")
61 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 현장보존의방법및종류, 현장에서조사할사항, 사고지점의확정, 현장도면작성, 증거물의압수, 감정, 가 피해자조사, 실황조사서의작성방법에대해서는경찰청훈령에명시되어있음 자율주행사고기록시스템구축에관한기준마련이시급함 지난 5월미국플로리다에서테슬라자동차가오토파일럿 ( 자율주행 ) 중대형트레일러를인식하지못하고충돌하여첫사망사고가발생해논란이되고있음 < 그림 3-17> 테슬라모델 S 사고상황 - 테슬라사고의여파로독일에서는자율주행차에대한블랙박스설치를의무화하고중국은실도로상에서주행테스트금지등자율주행차의추가적사고에대한우려로법규마련에고심하고있음 자율주행차가운행되기위해서는도로망의역할이매우중요한데도로망의운영은국가 ( 국토교통부, 지자체 ) 가운영을담당하고있으며, 이러한도로망의운영이자율주행차의운행에적합하도록유지하고관리할의무가있음 - 예를들면, 자율주행차는도로의차선및표지판을중요한정보로인식하고차량을제어하는데, 이러한시설물의관리의부실로인해차량이오작동하여사고가발생할수도있음 - 만일도로나신호체계의문제로인해사고가발생하였다면, 특정사고에대해서국가혹은지자체가손해를배상해야하는책임발생할수있음 자율주행차는일반자동차와비해다양한원인즉, 시스템결함이나장애및오작동, 통신보안, 사이버공격등으로인하여사고가발생할수있으며, 이에대한책임관계가복잡해질것임 - 자율주행차의사고원인을규명하기위해서는자율주행차량에대한정보를기록할수있는장치가필요하며이를분석하여책임에대한분석및판단을해야하고, 이를위해서는사고정보기록장치의장착을의무화해야함
62 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 - 정확한교통사고분석을위해서수사기관이나피해자가사고정보기록데이터에대한접근이가능하도록의무화할필요가있음 - 외적인사고현장이나운전자중심의조사만으로는책임소재를판단하기어렵기때문에다양한전문적인분석이필요함 - 교통사고원인에대한분석을통해명확한책임을판정할수있도록하는교통사고처리체계도정립해야함 차량제조사에서는자율주행차의안전성및기능개선을위하여소프트웨어업데이트를진행할것이고, 각자율주행차량에대한업데이트도진행해야함 - 소프트웨어업데이트는개별소비자에의해서이루어지거나, 통신망통해서원격으로도가능 - 하지만, 통신망을통해동시에이루어진다고할지라도모든자율주행차량이동시에같은버전의소프트웨어를사용하지못할가능성이존재하고, 이럴경우같은종류의차량이각기다른소프트웨어를탑재한채로운행될가능성도있음 - 새로운버전의소프트웨어로업데이트되지않은채로주행하는과정에서사고가발생할경우사고에대한책임소재에대한문제가발생할가능성이높음 - 환경또는구조적인문제로업데이트가늦어졌거나사용자의관리소홀로인하여소프트웨어업데이트를정상적으로완료하지못한경우이에대한책임을제조사, 시설관리자, 운전자 ( 사용자 ) 중누구에게가중시켜야할지에대한것도정의될필요가있음 AI 운전능력평가기준및검증체계 자율주행 AI 기술은개발하는완성차업체에따라다양하게개발할수있으나이를차량에탑재하여상용화하기위해서는세계신차평가제도 (Global NCAP, Global New Car Assessment Program) 에서인증을받아야함 세계신차평가제도는미국도로교통안전국 (NHTSA, National Highway Traffic Safety Administration), 유럽의유로신차평가제도 (Euro NCAP, Euro New Car Assessment Program) 이대표적이며, 현재각국에존재하는신차평가제도는미국과유럽의승인결과를각국의형태에맞게수용하는형태임 미국 NHTSA는 2013년 5월 Preliminary Statement of Policy concerning Automated Vehicles 를발표하여자율주행차관련정책방향을구체적으로제시하였고, 2020년말까지민간업계와공공기관의협업을통해광범위한부분자율주행시스템평가기준을도입할예정임 2016년 9월미국은연방정부 DOT에서 Federal Automated Vehicle Policy 를발표하였고, 이를통해국가적으로하나의골격을형성하는정책및기술관련평가기준안내서에관한기본골자를제공하고자함 미국 NHTSA는상기정책을통해자율주행차가시판전안내테스트를필수적으로거쳐야하는사전인증제를실시에관한내용을입법화추진전단계에서명시하였으며, 15 Point Safety Assessment 를통해차량의안전설계, 개발, 임시운행과양산을위한평가항목안내서를발표함
 를기본목표로설정하고이를달성하기위한 5가지전략 ( 대화, 평가, 기술개발촉진, 사회환원, 효과분석 ) 및하위세부전략을수립하여추진함 위의 4가지영역의평가에기반하여 2009년에전반적인안전등급을도입하였으며, 평가항목은성인 어린이 보행자")
63 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 3-18> NHTSA 의자율주행차평가항목및기준안내서 이를통해자율주행차가시판전안전테스트를거쳐야하는사전승인제실시를입법화하고완성차제조업체에차량설계의다양성허가및비전통적차량설계테스트를허가하는제한적면책권을부여함 유럽의 Euro NCAP은보다안전한자동차 (For Safer Car) 를기본목표로설정하고이를달성하기위한 5가지전략 ( 대화, 평가, 기술개발촉진, 사회환원, 효과분석 ) 및하위세부전략을수립하여추진함 위의 4가지영역의평가에기반하여 2009년에전반적인안전등급을도입하였으며, 평가항목은성인 어린이 보행자 안전장비로나뉘어평가됨
64 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 < 표 3-7> Euro NCAP 자율주행차의안전등급평가항목및내용 성인탑승자보호 어린이탑승자보호 보행자보호 안전보조장비 구분 Offset-deformable Barrier(ODB) Full Width Rigid Barrier Side Mobile Barrier Side Pole Whiplash AEB City CRC Performance Vehicle Provisions CRC Installation Check Head Impact Upper Leg Impact Lower Leg Impact AEB Pedestrian AEB Cyclist Electronic Stability Control Seatbelt Reminders Speed Assistance ACE Interurban Lane Support 내용 성인운전자및동반탑승자의보호를위한안전도평가 정면충돌, 측면충돌및편달검사등 6 가지충돌에대해평가기준에따른평가 유아및어린이탑승자의안전도평가 연령과크기에적합한아동보호시스템을통해아동의차량탑승을허가하도록권장 머리움직임, 목및가슴부하등이주요측정기준 주행중충돌가능성있는보행자의안전도평가 보행자머리, 골반, 다리의상지및하퇴등에대한잠재적인위험을평가 운전보조및충돌회피기술을평가하기위한안전정비의안전도평가 사고를피하고부상을줄이기위해안전한주행을지원하는운전자보조기술에대해평가 국내에서는 KNCAP(Korea New Car Assessment Program) 을통해신차및자율주행차의기술개발을평가하고있음 첨단운전자지원시스템이 2004년처음개발이시작된이래로 2010년부터기능인정및상용화하기시작하였고, 전방충돌경고장치 차선이탈경고장치외다수의자율주행기술인증이진행완료또는진행중이나국외사례와비교했을때다소늦은경향이있음 실도로환경시험단지구축 국내 외에서자율주행차의각종부품및안전성평가를위해실도로환경기반시험단지구축사업이진행되고있음 한국교통연구원은 2013년 C-ITS 기반연구개발계획 ( 안 ) 을도출하였으며, 국토교통부는 2016년실도로평가환경구축상세기획연구를통해완성차인증기획연구로본격적인자율주행차량평가및인증의근거를마련하였음 자동차부품진흥원에서는대구달성에기존의 ITS 기반지능형자동차부품시험장을활용하여자동차부품업체의실증및 ITS 기반지능형자동차부품전반의실험에관한주행시험장을구축하였음 - 고속주행, 오르막등여러가지교통상황에서자율주행차에탑재된부품의성능실험을수행함




65 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 한국건설기술연구원에서는국토교통과학기술진흥원 R&D 연구를통해경기도연천군에기상환경재현도로성능평가실험시설을구축하였음 - 눈, 비, 안개등기상환경에대응하여교통안전과야간조명, 도로소음등의환경조건에서실제규모의실증실험을수행함 - 특히, 악천후시차량안전시스템의가동및주행안전성평가에관한내용이주요검증항목임 국토교통부는자율주행차규제혁신방안에따라판교에창조경제밸리를실도로환경시험단지로설정하여총연장 4km 규모의자율주행및비자율주행차량공용도시형테스트베드타운을조성할예정임 - 연구기관및기업등과의협업을통한정밀지도구축 V2X 통신등의 C-ITS 기반인프라시설을설치하고중앙관제센터를통한실시간차량주행자료전송및교통상황관리를목적으로함 또한대구달성및수성구일대에기존자동차산업관련테크노폴리스및관련인프라와연계하여총연장 98.3km 구간에실도로환경시험단지를구축하고해당구간의정밀지도를구축할예정임 - ITS 자동차부품시험장을중심으로성능평가및부품인증을위한실증시험단지구축을추진함 - 1회방문으로차량의검증을완료할수있는서비스실증환경구축을목표로함 ( 가 ) ITS 기반지능형자동차부품시험장 ( 나 ) 기상환경재현도로성능평가시험시설 ( 다 ) 판교창조경제밸리개념도 ( 라 ) 대구실도로시험단지구성 < 그림 3-19> 국내실도로환경시험단지구축및계획현황
66 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 스웨덴은 2014년에미래형도로교통수단전반에관한안전실증시험으로서스웨덴 SP 기술연구소 (SP Technical Institute) 와 Chalmers 대학교에서공동소유하는 ASTAZero(Active Safety Test Area and Zero) 를구축하였음 - ASTAZero는세계최대규모의실제도로재현자동차시험장으로서총연장 5.7km의고속도로시험부와 700m의가속트랙을가지고있음 - 도심환경에대한현대적기반시설내도로교통상황을다양하게재현및평가가능하며, 레벨 3 이상자율주행차에관한각종안전기술을중점적으로실험함 일본에서는 2016 년약 13 만 구축하였음 부지에세가지종류의실도로환경시험시설로구성된 J-Town 을 - ( 특이환경시험장 ) 비 안개를일으키는설비를구축하여악천후시자율주행차가전방의신호및표지등을식별가능한지확인함 - (V2X 시험장 ) 도심환경에서외부통신설비와정보를정상적으로주고받을수있는지확인함 - ( 다목적시험장 ) 100m 사방아스팔트포장도로위에실제교통환경을상정한차선과공사표지등을배치하여각종위험상황에대응가능한지를확인함 핀란드에서는 2016 ~ 2020년까지국가기술연구센터주도로자율주행차의테스트베드마련을위한국가기술연구센터를수립하였음 - 교통통신부, 핀란드교육청, 핀란드교통안전청, 핀란드교통규제청등국가기관과약 100여개의민간회사가공동으로참여하여자율주행에관한이해관계를형성하고국가차원에서로드맵수립함 - 핀란드교통청, VTT 핀란드국가기술연구센터, 지자체, 지역개발청등 5곳을실도로환경시험단지로지정함 - 지역적특성상눈길자율주행, 악천후시도로주행등기상관련연구가활발히진행중 상설시험구간을이용한 AI 운전자격 ( 또는등급 ) 부여 인공지능기반자율주행에는다양한분야의기술이복합적으로요구되고있으며, 자율주행에필요한기술은크게자율주행을위한최소한의기본기능과정밀한성능및안전성제고를위한첨단기능으로분류됨 - 주행을위한기본기능은운전자가차량을주행하는과정에맞추어인지 판단및제어 작동으로분류됨 - 정밀성및안전성을위한첨단기능은주행위치의정밀측정을위한정밀측위 전자지도와주행방향을감지하는 V2X 통신으로분류됨
 자율주행인지, 판단, 제어를하나의심층신경망으로연결하여문제해결함 - ( 정밀측위및지도생성 ) SLAM(Simultaneous Localization and Mapping) 에기반하여차량내센서정보를바탕으로차량의위치, 자세, 지도를동시에생성함 - ( 차량용 AI 컴퓨팅플랫폼 )")
67 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 3-20> 자율주행차에필요한인공지능기술분류 자율주행차의기본기능과관련되는인공지능기술은자율주행인지, End-to-End 자율주행등이있으며, 첨단기능관련인공지능기술은정밀측위및지도생성, 차량용 AI 컴퓨팅플랫폼, 센서융합, 딥러닝등이있음 - ( 자율주행인지 ) 카메라이미지를통한차량, 보행자, 차선을검출함 - (End-to-End 자율주행 ) 자율주행인지, 판단, 제어를하나의심층신경망으로연결하여문제해결함 - ( 정밀측위및지도생성 ) SLAM(Simultaneous Localization and Mapping) 에기반하여차량내센서정보를바탕으로차량의위치, 자세, 지도를동시에생성함 - ( 차량용 AI 컴퓨팅플랫폼 ) 인공지능기반고성능컴퓨팅플랫폼으로서자율주행자동차의생산을가속화할수있도록하는개방형플랫폼임 - ( 센서융합 ) 여러카메라미광선레이더, 레이더, 초음파센서등을통해데이터를융합하여차량의 360도환경을파악함 - ( 딥러닝 ) 아키텍처로구성된심층신경망은데이터센서시스템에서학습후차량에탑재및배포 다음과같은인공지능기술은자율주행차의레벨에따라레벨 0 ~ 2 수준차량에대한운전자격부여와레벨 3 이상차량에대한운전자격부여로분류됨 레벨 0 ~ 2 자동차는인공지능기술이일부기능에한하여주행을보조하는형태로만활용되기때문에운전자에게최종책임이부여되고이때운전능력은기존면허제도로평가가가능함 레벨 3 이상자율주행차는일부상황을제외한대부분의경우에서자동차가자체제어로운전하므로제조업체에서주행에따른책임을짐 따라서특정상황을제외한대부분의상황에서운전자의별도제어없이복잡한동적운전을수행하는레벨 3 이상자율주행 AI 기술에대해차량에관한별도의운전능력검증과평가를위한상설시험구간을통해실질적인평가가요구됨

68 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 자율주행운전면허실증단지구축 자율주행차의기술발전및상용화에따라전세계적으로부품, 환경등에관한안전성평가외에실증적도로환경에서자율주행차의시험주행및운전면허와관련한각종실증단지의구축이진행되고있음 미국에서는미시간대학교소재에약 13만 능력평가시설인 M-City를구축함 면적의세계최초도시형자율주행시험및도로주행 < 그림 3-21> 미국자율주행도로주행능력평가실증단지 M-City - 자율주행차가실도로주행전에실제도로와가장유사한환경에서차량과시스템을평가하는시설임 - 약 8km 연장의차로를따라기존도시와동일한형태로가건물, 가로등, 교차로, 신호, 표지, 횡단보로, 지하차도등이설치되어있는도시부와자갈길, 철도건널목, 4차선도로등이설치되어있는교외부로구성됨 - 실증단지에서는약 64km/h( 시속 40마일 ) 로주행하는자율주행차의신호인지후진입결정, 횡단보도를건너는인공보행자가있을시정지여부, 고속도로구간내타차량과의군집주행, 굴곡이있는자갈길이나철도건널목에서의차선이탈없는안전주행, 신호가없는교차로에서사람및차량이없어도무조건정차후출발하는 4 Way Stop 교차로, 원형교차로에서진출입등다양한항목을종합적으로검증함 - 기타위치정보를송수신하는 GPS와통신방해가일어날수있는다양한환경조건 ( 가로수, 지하차도구간등 ) 에서의자율주행, Connected Vehicle 기술및기타통신관련실험이가능하도록실증단지를구축하였음
, 고속주회로 ( 고속도로 ), 조향성능로 ( 지방도로 ) 개량및확장을거쳐도심부,")
69 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 국내에서는교통안전공단이 2016 ~ 2019 년까지경기화성소재자동차안전연구원주행시험장내에 기존 ITS 시험로를확장하여안전한자율주행실험및도로주행능력평가를위한 K-City 를구축함 < 그림 3-22> 국내자율주행도로주행능력평가실증단지 K-City - K-City는미국미시건대학교에위치한세계최초자율주행테스트베드인 M-City를벤치마킹한것임 - 국내도로및교통환경을반영하여특정조건에서각종사고, 위험상황반복, 재현실험수행을통해자율주행차의기술개발및도로주행능력평가에활용하는것을목적으로함 - 기존 ITS 시험로 ( 시가지및국도 ), 고속주회로 ( 고속도로 ), 조향성능로 ( 지방도로 ) 개량및확장을거쳐도심부, 커뮤니티부및자율주차시설, 자동차전용도로, 교외도로로구성함 - 자율주행차의레벨 3 상용화를대비하여 2017년에자동차전용도로부터 2018년도심부도로순으로의단계적인구축을계획하고있음 미국의 M-City와국내의 K-City는자율주행차의실험및도로주행능력을검증하는시설이지만현재, 인공지능관련기술평가와운전면허발급에관한측면의연구에있어서는부족한실정임 또한하드웨어기반시설에서지도학습 (Supervised Learning) 과규칙기반 (Rule-based) 검증이주로이루어지기때문에차량의일반화된능력평가및물리적제약으로인한다양성확보가어려움 따라서다양한환경조건에서일반화된능력평가가가능하고실질적인도로주행을위한운전면허를부가할수있는실증단지구축이필요함
70 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 HILS기반 AI 운전능력검증시스템개발 자율주행운전능력평가시스템은가상의시뮬레이션환경과실도로환경모두를고려가능 시뮬레이션환경은운전능력평가시비용과시간을절약할수있으며, 실제발생할수있는사고등의위험상황또한제거할수있는장점보유함 특히주행테스트시나리오에대한분석기법및알고리즘을적용하여객관화된지표를정립하고이에따라테스트, 분석함으로써자율주행차량이실제로운행되었을때의안전한지의여부를판단 또한사고상황등에대한다양한주행환경시나리오를구축하고테스트하는것이가능하여실제로자율주행차량이사람이운전하는차량보다안전함을입증하는도구로도사용가능 주행환경시나리오와테스트에대한정보를데이터베이스화하여운영하면보다더객관화된지표를마련가. 가상인지환경구축 자율주행을위하여설치된다양한검지체계를통하여도로에서수집되는가상의데이터또는신호정보를생성함 - Lidar, Vision, Laser, Radar 등각종인지체계의가상데이터 가상으로생성된인지데이터는실도로교통환경을현실적으로반영하여정보를생성하는가상인지환경생성모듈에의하여생성 가상의인지환경으로부터생성된데이터또는신호는자율주행을위한인공지능 (Artificial Intelligence, AI) 의입력자료로변환되어입력 - 자율주행차량에탑재된자율주행 AI가인지할수있는표준화된정보 Set으로변환할수있도록 Interface를구축하고이를통하여데이터변환 자율주행 AI를검증을위하여 Interface의전후입출력자료의표준화필요나. 자율주행 AI 운전능력평가검증체계 가상인지환경데이터입력후자율주행 AI는입력자료를기반으로가상환경에적합한주행의사결정을수행하며, 차량을제어하기위한제어명령을생성 - 차량제어명령은차량의 ECU(Electronic Control Unit) 로입력되는정보 해당제어명령에의한결과인차량거동의적합성여부를판단하여자율주행 AI의판단능력적절성여부를검증

")
71 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 3-23> 자율주행운전능력평가시스템 HILS 개요도 3.3 자율주행을위한 AI 기반신호제어시스템개발동향조사 C-ITS 및 RSE 연계형자율주행지원스마트신호제어기개발기술 자율주행신호제어는미리규정되어있는예외상황이긴하지만, 그발생시각및장소가일정하지않은상황 ( 응급차량, 경찰차량의등장 ) 을고려한신호제어기술들이공개되어있으므로이러한아이디어를반영한전략수립이요구됨 교통신호제어기와 C-ITS(RSE) 또는차량정보센터간신호정보및차량운행정보를상호연계하는장치도입등이필요하며교통신호제어기연계서비스규격화를위한법 제도, 표준 인증이필요 < 그림 3-24> C-ITS 신호연계장치 (CVIB) 정보전달연계도

 5G 기반자율주행서비스고도화를위한 AR, 영상분석, 원격제어등서비스실증 자율주행차량과일반차량이혼재된교통상황관리르위한능동적인주행관체플랫폼실증 통합 5G/LTE V2X 기지국및단말개발및고정밀위치측위기술등실증 나.")
72 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 가. 과학기술정보통신부기가코리아사업 과학기술정보통신부의기가코리아사업은 5G V2X 기반의자율주행과 C-ITS 서비스개선을통해자율주행서비스모델발굴및교통사고율감소실현에두고있음 5G-V2X 네트워크기반차량 - 네트워크및차량 - 차량간통신기술및융합서비스실증사업추진 < 표 3-8> 기가코리아연구개발사업 구분 연구목표 1 단계 ( ) 2 단계 ( ) 내용 5G V2X 기반의자율주행과 C-ITS 서비스개선을통해자율주행서비스모델발굴및교통사고율감소실현 5G 기반자율주행버스개발 (45 인승, 25 인승 ) GPS + Vision 기반자율줗애기술개발및신호등연동 In-Direct V2X 기반협력자율주행 ( 앞차영상, 위치, OBD 정보 ) 5G 기반자율주행서비스고도화를위한 AR, 영상분석, 원격제어등서비스실증 자율주행차량과일반차량이혼재된교통상황관리르위한능동적인주행관체플랫폼실증 통합 5G/LTE V2X 기지국및단말개발및고정밀위치측위기술등실증 나. 한국도로공사스마트자율협력주행도로시스템개발 총 4 세부로구성되며자율주행을지원하는첨단도로인프라개발을목표로자율주행차와협력하는첨단도로시스템기술력확보, 도로인프라정보와차량내ㆍ외부정보통합을바탕으로차별화된원천기술과응용기술개발함 ( 가 ) 스마트자율협력주행개요도 ( 나 ) 스마트자율협력주행과제구성 < 그림 3-25> 스마트자율협력주행도로시스템개발 ( 자료 : 자율협력주행도로시스템개발연구단 )
, 차와인프라간 (C2I)")

73 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 실시간신호운영을위한자율주행차정보수집기능기술 자동차와환경간의증가하는공생은차량의경계를넘는향상에많은기회를제공하며차량간 (C2C), 차와인프라간 (C2I) 통신과같은새로운기술은자율주행차를지원함 원격소프트웨어업데이트를제공해많은비용이드는리콜을최소화할수있으나동시에외부에서자동차에액세스할수있는가능성은모바일폰, 블루투스또는 Wi-Fi 등을통해해커공격의위험을증가시킬수있음 실시간신호운영은기존감응식기술을향상시킨통신감응방식으로개체간기술을개발하며차량및시설에관한모든정보는교통정보센터의서버로관리필요 < 그림 3-26> 자율주행정보수집기술 < 그림 3-27> 통신보안컨넥티드기술
 - 정밀전자지도기반의동적정보시스템개발 (1세부) - 목표 : 도로, 교통, 주행등의정보를수집, 저장, 관리, 제공하여차량이주변도로의상황정보를기반으로자율주행차량의안전성및정확도향상에기여나.")
74 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 가. 국내R&D 현황 자율협력주행을위한 BLDM 및 V2X기반도로시스템개발 ( 국토교통과학기술진흥원 ) ~2020.7(5차년과제중 3차년도진행중 ) - 정밀전자지도기반의동적정보시스템개발 (1세부) - 목표 : 도로, 교통, 주행등의정보를수집, 저장, 관리, 제공하여차량이주변도로의상황정보를기반으로자율주행차량의안전성및정확도향상에기여나. LDM(Local Dynamic Map) 협력형 ITS 기술개발을위해 ITS기지국간에교환되는방대한양의데이터를신속하고정확하게처리하기위해제안된기술 정적인전자정밀지도정보와동적인운행정보등자율협력주행의운행제어와관제를위한모든정보포함 - 국제표준화기구 (ISO) 와유럽전기통신표준협회 (ETSI) 등에서개념표준이제정됨 (TS , IS18750) < 그림 3-28> LDM(Local Dynamic Map) 자율주행차위치및경로정보를이용한신호교차로정체예측기술 자율주행차이교차로를통과하는상황에서, 영상획득부 ( 비젼센서 ) 를갖는교차로통과지원장치를구축하여, 접근차량에대한위험도와접근차량에대한정보데이터를형성하여, 자율주행차량측에제공하고, 자율주행차량은이러한위험도데이터와접근차량정보데이터및자율주행차량정보를기반으로교차로에서제동, 출발, 서행등의이동여부를판단하여자율주행을제어할수있도록시스템개발
 - 차대차 (V2V, Vehicle to Vehicle) - 자동차와보행자 (V2P, Vehicle to Pedestrian) 등자동차를중심으로무선통신을통해각종교통 도로상황 차량")
75 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 3-29> 자율주행차량의교차로통과지원시스템 감응식신호교차로는황색시간동안교차로에접근하는차량을효과적으로처리 - 전체적인운영효율을높일수있음 - 통신관제를통해교차로로접근하는차량의속도분포와위치정보를통하여정체예측기술도입을검토할수있음 < 그림 3-30> 차량존재확률분포 V2X는무선통신을기반으로하는커넥티드카기술의일종임 보다안전하고완벽한자율주행차를구현하기위한필수조건으로 - 자동차와인프라 (V2I, Vehicle to Infra) - 차대차 (V2V, Vehicle to Vehicle) - 자동차와보행자 (V2P, Vehicle to Pedestrian) 등자동차를중심으로무선통신을통해각종교통 도로상황 차량 보행자정보를교환하고공유함


76 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 < 그림 3-31> 통신을통한교차로점유율산정 교차로통과시 V2V 통신이가능한주변자동차와의충돌이예상되는경우해당정보를운전자에게 제공하는 ' 교차로주변차정보서비스 ' 와전방차종분류로정체를예측함 AI 기반광역네트워크차원의최적신호운영기술 다양한출처를갖는소통정보들은하나의데이터뱅크안에서통합되어야하며, 이데이터뱅크에서는현재의소통정보와장래의소통정보를생산하여제어시스템에공급하는역할을하게되고, 제어시스템은제어이력을다시데이터뱅크에빅데이터로축적됨 < 그림 3-32> AI 기반광역네트워크신호운영

77 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 네트워크차원의통행패턴학습과기점별 AI기반의자율주행차교통정보는구간별교통데이터를생성함 - 데이터뱅크에서제공되는자료를이용하여신호교차로의현재및장래의지체수준및이동류별여행속도지표등을가공하여신호교차로최적신호시간계획을생성하는신호제어관제시스템은동일센터내에위치 도시의교통정보수집인프라가신호제어를위한신뢰성을확보하지못할경우, 대안으로서별도의휴대단말기기반수집장치의설치가필요할수도있음 교통정보수집전략개발부문에는휴대단말기로부터교통정보를생성하는수집시스템개발을통해광역차원의교통정보와신호운영기술을개발함 < 그림 3-33> 네트워크신호운영방법 통신기반의개별차량감응제어 (Actuation Control) 기술 좌회전교통량이적은지점에불필요한신호현시를생략및최소화하여주도로직진류통행권을보장하며도로상황실시간모니터링장치로의활용이가능하며다양한정보연계환경을제공하기위해통신기반의감응기술을개발함 감응제어시스템은반감응제어, 좌회전조기종결, 보행자감응으로운영함 - 차량검지는부도로와주도로좌회전차로에루프검지기를설치하여차량이없는경우에는신호현시를조기종결하고, 주도로에현시를부여하여운영하는기술을개발함 신호주기는고정하여교차로간연동효과를유지할수있도록구현이필요하며보행자감응은모든횡단보도에보행자작동신호기를설치하여보행자와차량신호를독립적으로감응함 감응제어시스템에서사용되는차량검지기는현재신호교차로에사용되는매설형루프검지기를기본으로하며, 도로파손으로인해검지능력이상실되거나저하되는것을방지하기위해일반적인도로포장이아닌변형에강하고, 내구성이강한포장을고려함


78 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 < 그림 3-34> 차량검지방식 < 그림 3-35> 통신기반감응방식 자율주행차의운행경로최적화를통한정체관리기술 V2V 통신은자율주행차의위치, 속도, 방향등의다양한데이터를무선으로초당 10회다른차량과주고받음 - 탑승차량에장착된센서가포착하지못하는데이터를공유할수있으며, 차량뿐아니라교통통제시스템, 신호등과연계도포함되어야함 정체통합교통관리는통합대상에따라교통관리기법의경우에는개별기법들의기술적인통합방법이시스템의경우에는현장설비와센터의통합운영방법, 공간의경우에는교통관리구간의통합운영방법, 운영조직의경우교통관리운영조직의통합방법등다양한관점에서구현이필요함
, 무인자동차등과의연계기술이기도함 -")


79 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 3-36> 고속도로정체관리기법 커넥티드카 (Connected Car), 무인자동차등과의연계기술이기도함 - 하드웨어와소프트웨어의결합체인커넥티드카와무인자동차가제기능을발휘하기위해서는 C-ITS와같은교통인프라차원에서의시스템구축이필수적임 V2V, V2I 통신시스템및인프라를구축해안전성, 이동성, 환경성을극대화하기위한 Connected Vehicle, 실제주행환경에서차량간연계기술시험, 차량기반의안전시스템에대한운전자반응및대응분석, DSRC 기술의타당성, 확장성, 안정성, 상호운영성등의평가, 안전성향상위한추가기능평가등을목표로기술개발필요 ( 가 ) 고속도로램프미터링개요도 ( 나 ) 연속류스마트카서비스개요도 < 그림 3-37> 스마트카센싱연계정체관리기술
 을이용하여다양한차량모델구성및테스트시나리오구성을할수있기때문에자율주행차량과연계한평가방안및활용방안모색필요")
80 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 HILS 기반자율주행신호운영시스템시뮬레이션평가체계 V2V, V2I 통신시스템및인프라를구축해안전성, 이동성, 환경성을극대화하기위한 Connected Vehicle, 실제주행환경에서차량간연계기술시험, 차량기반의안전시스템에대한운전자반응및대응분석, DSRC 기술의타당성, 확장성, 안정성, 상호운영성등의평가, 안전성향상위한추가기능평가등을목표로기술개발필요 Simulink Library 형태로제공되는차량동역학 Open Model을제공하는 ASM(Automotive Simulation Models) 을이용하여다양한차량모델구성및테스트시나리오구성을할수있기때문에자율주행차량과연계한평가방안및활용방안모색필요 센서퓨전기반도심지인공지능상황인지및운행기술개발과센서퓨전기반기능개발및성능평가용주행환경 DB구축, 국제표준기반소프트웨어 / 시스템평가기술개발및검증을포함하는시뮬레이션설계필요 < 그림 3-38> EBS Test HILS 장치

81 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 3-39> EBS Test HILS 구성도 3.4 IoT 기반교통안전시설정보제공및운영관리기술개발동향조사 효율적인교통안전시설규제정보공공개방전략 자율주행및 C-ITS 기술이현실화되면서교통안전시설물정보에대한요구가증가하고있으며, 각종실시간교통정보와의융합에따른새로운정보의생성요구도함께늘어나고있음 교통안전시설물규제정보와같은공공데이터의개방과활용은경찰과시민간의소통활성화를통한대국민행정서비스의질을제고하고, 민간과의협업구현등에있어서중요한의의를지니고있음 가. 경찰청교통안전시설물규제정보개방방안연구 경찰청은교통안전시설물규제정보의개방요구에대비한대응방안및로드맵수립을통해향후고도화된미래교통체계에대비하고, 통합정보시스템의구축및기존교통정보와의연계를활성화할수있을것으로예상 또한새로운교통정보서비스의기반을마련하여향후자율주행및 C-ITS의교통환경에대비할수있을것으로기대됨나. 서울시교통안전시설물개방사례 서울시의교통안전관리시스템은 GIS 기반의전자지도에교통안전시설의설치위치, 공사이력, 사진등을표시하여사용자 ( 서울시교통운영및도로시설물관리자 ) 에게정확한자료와각종통계자료를제공하여업무의효율성을높이는업무지원시스템으로정의할수있음

82 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 시스템에접속한사용자가교통안전시설물의통계자료활용및운영 / 관리업무지원을위한시스템으로활용하고있음 또한인터넷을통해이용시민의불편사항이나고장신고접수 / 처리및각종규제정보, 통계등을시민에게제공하는기능도수행중 < 그림 3-40> 서울시 T-GIS 시스템의정의 교통안전시설관리를위한표준코드체계 국내많은시설물을관리하는지자체나공공기관들은다양한형태의시설물유지관리시스템및운영시스템을사용하고있으며, 개별기관의특성에따라관리목적을달리하여필요한시스템을구축, 운영하여유지관리활동을수행하고있음가. ITS 현장시설물유형및코드부여현황 ITS 현장시설물유형및장비상세구분을위해관련정보를코드화하여이를기반으로한현장시설물 ID를부여하는데활용함은물론 ITS 현장장비의도입연도유형별운영현황등다양한분석이가능하도록하고있음
83 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 표 3-9> 코드부여방식 장비종류 종류코드 장비구분 구분코드 비고 루프 01 영상 02 VDS 01 레이더 03 마이크로웨이브 04 기타 05 AVC AVI 일반 01 CCTV 04 IP/WEB 02 기타 03 DSRC 01 RSE 05 UTIS 02 WAVE 03 기타 04 문자식 01 도형식 02 VMS 06 동영상식 03 표지판식 04 기타 05 LCS 01 LCS 07 VSL 02 가변속도표지판 기타 03 RMS 램프미터링설비 안개 / 시정계 01 Co2 02 RWIS 09 풍향 / 풍속 03 노면온습도 04 통합형 05 기타 06 AID 돌발상황검지용장비 LCD 01 BIT 11 LED 02 LCD/LED복합 03 기타 04 과속 01 신호 02 단속설비 12 버스 03 주차 04 과적 / 과중 05 기타 06 전송국사

84 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 표준코드체계기반교통안전시설물정보관리시스템및관리기관용운영프로그램개발가. 교통안전시설물관리시스템현황분석 서울시교통안전관리시스템은 2009년 9월부터지방분권촉진위원회의 중앙행정권한의지방이양확정사무 에의한업무이관에따라체계적인교통안전시설물관리의필요성이생기고, 기존에시설물의설치현황및보수이력에대한체계적인관리체계가부족하여이에대한보완으로시스템을설치함 시스템의설치목적은다음과같음 - 교통안전시설물의효율적인구축및유지관리를위한시스템의필요 - 교통안전시설물관련통계자료를활용한업무지원체계필요 - 추가시설물의우치와보수이력관리등을위한종합정보시스템구축필요 서울시에서구축한주요교통안전시설물은아래그림에서붉은색으로표기된총 14개의항목으로구성 - 부착대, 신호등, 안전지대, 신호제어기, 지주, 횡단보도, 과속방지턱, 도로반사경, 시선유도봉, 차도 / 보도, 행정경계, BIS 단말기, 위험도로등 14개임 < 그림 3-41> T-GIS 정보관리항목 교통 / 도로안전시설물, 특수교통운영구역등의통계시설물항목을세분화하여업무환경에맞도록통계적으로표현이가능함 교통안전시설물과관련한서울시교통운영과, 각구청 / 경찰서의업무담당자에게관할지역내의시스템운영권한을부여하고, 이용자가데이터를추가, 수정, 삭제할수있는권한을가짐 서울시 6개도로관리사업소 ( 동부, 서부, 남부, 북부, 강서, 성동 ), 자치구별로데이터를유지관리하기위한인력을운영중에있음


85 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 3-42> 시스템관리및권환체계 국토교통부에서운영하는 V-world 배경지도를기본도로사용하고, 항공사진을제공하고있고, PC와모바일을통행시스템접근이가능하여현장업무를지원할수있음 T-GIS를활용한업무는관리자가권한을 - 산하기관및시공사에게제공하고 - 담당업무자는준공도면및현장조사를통해시설물에대한관리업무를수행함 검수팀에서는시설물의위치및속성을검수하여수정을요청하고, 유관기관에서는자료를요청하여시설물에대한현황을파악할수있음 < 그림 3-43> 시스템운영 / 관리현황

86 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 시스템구성은아래그림과같음 < 그림 3-44> T-GIS 시스템구성도 이와같은교통안전시설물관리시스템은서울특별시외에도 2010년부터시흥시, 2009년부터청주시에도구축되어운영되고있고, 현재일부경기도지자체와대전시등에서도구축이진행중에있음 하지만, 현재구축되어있는정보의정확성은유지 / 보수의한계와정보수집및입력자의전문성결여로인해많이부족한상황임 특히시설물의위치변경이적은신호제어기, 신호등과같은교통안전시설물은위치의정확성이높지만, 기타단말기와시선유도봉과같이잦은위치변경과유지보수가잦은시설물의정확성이부족한상태임 따라서현재구축되어있는데이터를사용하여향후자율주행과같은첨단교통운영시스템에적용하기는어려움이있을것으로판단되고, 교통운영및도로상에설치된기타부속시설물에대한추가적인데이터확보가필요할것으로예상
87 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 자율주행차량제조사대상클라우드형정보제공체계 최근자율주행차량연구의한축은클라우드지원자율주행자동차 (Cloud-assisted Autonomous Vehicle) 로, 클라우드서버들의지원을통해보다안전하고효율적인주행과추가적인서비스를제공하고자하는시도가활발히이루어지고있음 다수의차량및주행관련서비스와인프라가클라우드에연결되어서로정보를교환하는구조를이루는데, 이중클라우드내의서버의역할은차량내외부센서들과다양한자율주행서비스및주행관련인프라로부터주행에필요한데이터를수집하고차량운행에필요한정보를분석하여차량으로전달하는역할을함가. 자율주행차대상클라우드기술현황 토픽기반분산배포-구독메시징시스템은메시지를전달하고자하는배포자가메시지를송신하고자하는특정수신자 ( 구독자 ) 에게직접전달하는대신, 메시지를관심주제 ( 토픽 ) 별로범주를나눈뒤이를브로커로전송함 - 구독자또한본인의관심주제에대해브로커를통해구독신청을하고이에해당되는메시지들을전달받는방식으로동작하는메시징방법임 카프카는 2011년에오픈소스화된토픽기반분산배포-구독메시징시스템임 - 기존의다른토픽기반분산배포-구독메시징시스템에비하여동시간에많은데이터를처리할수있고, 다양한언어를사용하여개발할수있으며, 특히스트리밍데이터처리에유리하므로주목받고있음 < 그림 3-45> High-level view of Kafka architecture 클라우드는기존의방식에서벗어나가상화기술, 클라우드인프라서비스의도움으로다양한서비스를제공하며인프라, 플랫폼, 소프트웨어등으로분류가가능함

88 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 < 표 3-10> 클라우드기술 분류가상화컴퓨터클러스터분산데이터관리기술분산병렬처리기술 소프트웨어적기술로논리적개념을가짐 기술내용 물리적시스템에의존하지않는관련자원을분리 / 통합하는기술 1:N/N:1 의나눠쓰는서버, 또는하나로사용하는서버 다수의물리적시스템에서논리적하나의시스템으로클러스터링함 기하급수적으로즈가하는데이터연산과저장에효율적임 하나의시스템에서여러대의서브시스템을사용하는효과 시스템가용상태유지, 서버관리, 자원의배분, 분산기능수행 대규모의구조화된데이터를분산시킴으로써기하급숵으로증가된데이터량을줄일수있음 새로운시스템을추가하거나확장이손쉽게가능하도록함 다양한업무에따른연산기능의극대화가필요함 연산기능극대화위해여러시스템에서업무를나누어처리함 업무효율성을높이고네트워크의부하를줄이는데필요 교통안전시설에적합한 IoT 장치요구사항 IoT의발전을기술적, 상업적으로발빠르게활용하고있는분야가자동차산업으로아래와같이개발되고있음 (1) 탑승자가차량인테리어나차량자체와통신하는다양한기기를 IoT 장치로보는관점, (2) 차량에내장된다양한센서들을 IoT 장치자체로보는관점, (3) 위치가고정된센서에기반한고정형 IoT에대비하여, 차량을움직이는이동형 IoT 장치 < 그림 3-46> IoT 장치연계 교통안전시설의경우자율주행차의센서가인지 ( 인식 ) 하기쉬운특수표지판, 특수차선, 차로구분정보제공등의방법으로신규교통안전시설물을개발하고있음


89 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 자율주행관련차선표시방안으로는영상처리에기반한차로구분 ( 차로內측위는차선인식으로가 능 ), 차선에마그네틱이나특수도료, 센서를부착, 일정간격으로노면표시배치 ( 종방향측위확인및 보정 ) 등이제시되고있음 < 그림 3-47> 노면표시배치방법 현교통안전시설물설치기준은일반운전자의관측각및관측거리를기준으로제시되고있으나향후자율주행기술도입시현영상기반인식기술의한계로관측각및관측거리는낮아질것으로예상되며교통안전시설물의기준개선을통해이점을보완할필요가있음 또한, 교통안전시설물의표시방식의변화도가능함에따라국내 외적인기술및정책동향을지속적으로분석하여교통안전시설물설치 관리기준을개선하거나신설해야함 < 그림 3-48> 교통안전시설물개선 현장기반 IoT 정보제공응용프로토콜기술검토 북미는 SAE J2735를따르는 Basic Safety Message (BSM) 을주기적으로 ( 통상 100ms 주기 ) 전송하며, BSM에는전송자의위치, 속도, 가속도, 방향등의정보가포함되어전송되며 BSM 수신자는 BSM의정보를분석해충돌위험이있는지판단함 C-ITS V2X 통신호환성확보를위한고려사항으로 IEEE Std 과 2016 규격은호환성이없어 SAP(Service Access Point) 대다수변경이가능함
 기술은이미통신지연에민감한 V2X 통신의기반기술로사용중임 미국에서는약 3.")
 관련법제화를추진하고있음 < 그림 3-50> V2X 통신기술 전통적으로")

90 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 ( 가 ) IEEE Std ( 나 ) IEEE Std < 그림 3-49> IEEE 통신규격 와이파이기반의 IEEE802.11p(WAVE, Wireless Access in Vehicle Environments) 기술은이미통신지연에민감한 V2X 통신의기반기술로사용중임 미국에서는약 3.8톤이하자동차의도로주행안전성을향상시키기위해, 미국고속도로교통안전위원회 (NHTSA) 는 5.9GHz 주파수대의 DSRC(Dedicated Short Range Communications) 관련법제화를추진하고있음 < 그림 3-50> V2X 통신기술 전통적으로 ITS관련국제표준화추진은 ISO/TC 204에서추진하고있으며, 총 14개분야작업반 (WG) 을구성하여 57개국이참여중이며, TC 204 내표준화를위해 ISO 내관련 TC는물론외부기관과협력체계를구축하여논의와협조를지속적으로추진함 ISO/TC 204는전반적인 ITS 서비스에대한인터페이스, 메시지, 프로토콜, 정보교환규격, 시험방법등에대한표준화는물론이를구현하기위한아키텍처, 통신등기반기술에대한표준화도함께진행중임


91 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 그림 3-51> ISO/TC 204 표준화범위 관리센터와실시간연동하는관리소프트웨어개발 IPv6 연동망 (6NGIX, IPv6 Neutral Generic Internet Exchange) 은 KISA 가 2008 년부터운영하는국내 IPv6 기반의인터넷망으로써, 국내 ISP, IX 간 IPv6 트래픽연동및국내기업대상 IPv6 기반의테스트환경을지원 현장의교통안전시설정보를관리센터와실시간연동및정보갱신을위한프로그램은사물인터넷관련표준규격기반으로스마트시티와관련된다양한응용서비스와사물들을표준기반으로쉽게연계 IoT 서비스개발자또는관리자를위한관리 Portal 제공, 자체웹포털제작이어려운소상공인또는개인을위한디바이스의센서데이터를위젯으로표출하고, 디바이스데이터의그래프표출기능제공등으로응용 < 그림 3-52> 시설관리표준 S/W 기술개발
92 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 3.5 국내 외특허및연구동향 국내 외특허동향분석가. 특허조사기술정의 조사대상기술은 (1) 자율주행신호제어, (2) 자율주행교통정보의실시간수집및제공, (3) 자율주행자동차의교통운영및관제, (4) IoT 기반자율주행교통안전시설물, (5) 자율주행운전면허의관리와평가등에대한인프라, (6) 자율주행차교통사고조사및분석기술, 및 (7) 자율주행시대의현장교통통제및단속기술임 상기조사대상기술에대한특허동향을분석함 < 표 3-11> 특허동향기술분류 구분 AI 기반의자율주행신호제어시스템 자율주행교통정보의실시간수집및제공기술 자율주행차의교통운영및관제플랫폼기술 IoT 기반자율주행교통안전시설물 자율주행운전면허의관리와평가등에대한인프라기술자율주행차교통사고조사및분석기술 자율주행시대의현장교통통제및단속기술 기술정의 자율주행차량들과일반차량들이서로상충할수있는교차로지점에서인공지능기술을활용하는교통운영기술, 및빅데이터기반인공지능의혼잡예측교통관리 ( 혼잡지역예측, 교통예보, 혼잡예방신호제어 ), 예측신호제어, 위기대응제어기술 (E-Call 대응신호서비스, 긴급차운선신호서비스, 돌발상황해소제어등 ) 자유주행, 반자율주행, 비자율주행차량의교통흐름정보를아우르는교통정보로서정밀위치정보, 신호제어기정보, 가변규제정보 ( 예 : 강우, 강설, 박무등으로인한제한속도변화 ) 등을실시간으로수집하여제공하는기술 자율주행운전면허를확인, 자율주행의교통운영및제어정보를교류, 교통사고발생의경우원인분석에필요한자료를생성및관리, 교통안전안전경고발신이력을관리, 교통안전시설정보등과실시간정보교류, 돌발상황발생에따른교통통제및단속등을수행하기위한교통운영체계와이를위한관제플랫폼에관한기술 자율주행차량에교통안전시설 ( 안전표지, 노면표시, 교통신호기 ) 의시각정보뿐만아니라차량에장착된감지장치가인지할수있는 IoT 기반정보를실시간으로제공하고관리하기위한인프라기술 자율주행차의운전면허시험과관리등에대한시뮬레이터, 자율주행차의주행성능평가를위한다양한시험평가시나리오및기술, 및제어권전환에대한운전자의반응속도확인기술 자율주행차의교통사고를조사하고분석하기위한기술, 자율주행차의기술수준과시장보급수준에따른설정을고려한교통사고조사분석기술 돌발상황또는자율주행을위한교통안전시설물의정보갱신지연에따라일시적으로자율주행차를통제하거나제어하기위한기술, 자율주행차의제어권이각차량객체단위로운영에서중앙관제또는이동식관제기능으로이양하여통제하거나제어하기위한제반기술, 제어권이운전자와시스템으로이원화등을고려하여운전자의무사항준수여부와신호및지시위반, 과속등의불법운행을단속하기위한기술
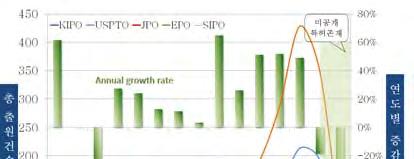
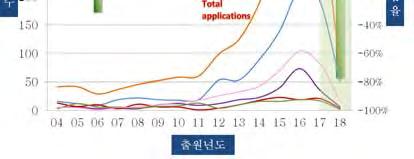

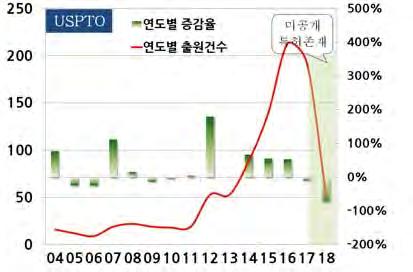
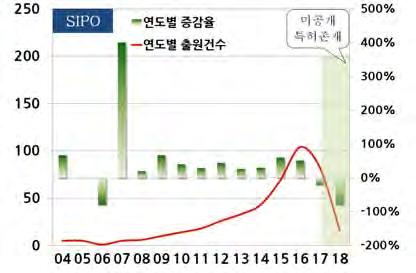
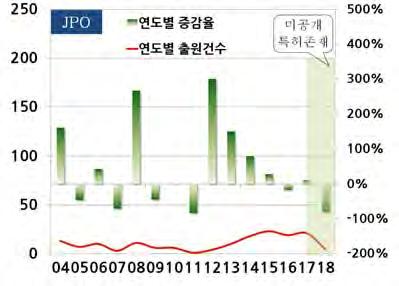

93 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 나. 연도별특허동향 중국및미국의자율주행관련기술연도별출원증가율이크게나타나고있음 ( 가 ) 전체출원건수 ( 나 ) KPO 기준 ( 다 ) USPTO 기준 ( 라 ) SIPO 기준 ( 마 ) JPO 기준 ( 바 ) EPO 기준 < 그림 3-53> 자율주행기술관련특허동향 국내지능형교통시스템분야특허출원은 2010 년본격적으로시작되어 2016 년이후급증하고있음 2010~2015 년에는한해평균 109 건정도출원되었으며 2016 년에 177 건으로급증하였으며, 2017 년에는 196 건으로 2015 년대비 2 배가까이증가함

94 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 최근 5년간출원된기술을분석한결과, 통신관련기술 (41%), 내비게이션관련기술 (18%), 교통신호제어관련기술 (10%), 교통량감지기술 (5%) 순으로나타남 2005년이후출원인유형을분석한결과중소기업 (39%), 학교및연구소 (22%), 대기업 (16%), 외국기업 (5%) 순으로조사돼중소기업과연구기관의출원비중이상대적으로높은것으로나타남 < 그림 3-54> 국내 AI 교통신호분야특허출원추이 < 그림 3-55> 국내 AI 교통신호분야출원인비율 선행연구동향분석 자율주행운행체계및교통인프라관련선행연구는국가연구개발을중심으로분석함 검색 DB는국토교통과학기술진흥원및한국교통연구원, 한국건설기술연구원및국가과학기술정보센터연구보고서 DB 등을검색하였으며연구사업명, 연구과제보고서명, 연구보고서초록을검색범위로함 주요연구수행기관은국책연구원및국토교통부, 경찰청산하기관이며첨단교통인프라및영체계기술, 자율주행협력기술연구가 2010년이후주를이루고있음 교통운
95 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 표 3-12> 본기획과제관련선행연구검색방법 구분검색 DB 검색키워드검색범위 선행연구검색범위 국토교통과학기술진흥원연구보고서관리 DB 한국교통연구원연구보고서관리 DB 한국건설기술연구원연구보고서관리 DB 한국철도기술연구원연구보고서관리 DB 국토연구원연구보고서관리 DB 서울연구원연구보고서관리 DB 도로교통공단교통과학기술원연구보고서관리 DB 국토해양부연구보고서관리 DB 건설기술정보시스템 (CODIL) 연구보고서관리 DB 국가과학기술정보센터 (National Digital Science Library; NDSL) 연구보고서관리 DB 자율주행, 신호운영, 통합관제, 교통안전시설연구사업명, 연구과제보고서명, 연구보고서초록 선행연구검토결과는 < 표 3-13> 과같음 < 표 3-13> 선행연구 년도 과제 ( 연구 ) 명 과제책임 수행기관 2015 스마트자동차시험운행을위한도로관련제도개선연구 강경표 한국교통연구원 자율주행시대를대비한첨단도로인프라의전략적관리방안연구 김광호 국토연구원 첨단인프라기술발전과국토교통분야의과제 -자율주행자동차중심 이백진 국토연구원 자율주행차량의운행을위한법적이슈 임이정 한국교통연구원 2016 자율주행시대를대비한도로의역할 이기영 한국도로공사 도로표지속성정보의자동추출기술개발 정규수 한국건설기술연구원 미래도로체계전망을통한고속도로기능강화방안수립 이기영 한국도로공사 자율주행자동차의실시간제어를위한고속 V-Link 통신기술개발 정상문 한국전자통신연구원 자율주행차도입의교통부문파급효과와과제 우승국 한국교통연구원 자율주행차량에대응한첨단교통인프라정책방안연구 오성호 국토연구원 자율주행차도입이국토공간이용에미치는영향연구 이백진 국토연구원 미래가치창출형신교통시스템개발 윤혁진 한국철도기술연구원 2017 스마트자율협력주행도로시스템개발최종보고서김규옥한국교통연구원 자율주행을위한교통안전정보제공방안연구기용걸도로교통공단 모빌리티정보공유형인공지능센터구축및요소기술개발기획 양충헌 한국건설기술연구원 자율주행대중교통의안전성향상을위한스마트인프라핵심기술개발 윤혁진 한국철도기술연구원 차세대첨단교통체계 (C-ITS) 의도시지역효율적도입방안연구 윤태관 국토연구원 ICT기반차량 / 운전자협력자율주행시스템 (Co-Pilot) 의판단제어기술개발 한우용 한국전자통신연구원 서울시사물인터넷산업잠재력과육성방안 조달호 서울연구원 2018 자율주행차량의안전및서비스성능강화를위한 C-ITS의역할 윤진수 한국교통연구원 자율주행차상용화를고려한도로부문대응과제 : 도로설계및계획 김광호 국토연구원
 의판단 / 제어기술개발 (2017, 한국전자통신연구원 ) (1) 개발목적 다중센서및차량통신기술 (V2X) 을기반으로주행상황을인식하고, Direct/Indirect 인식기반으로운전자상태 (Normal, Drowsy, Inattentive, Unresponsive) 를판별하여,")
96 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 가. ICT 기반차량 / 운전자협력자율주행시스템 (Co-Pilot) 의판단 / 제어기술개발 (2017, 한국전자통신연구원 ) (1) 개발목적 다중센서및차량통신기술 (V2X) 을기반으로주행상황을인식하고, Direct/Indirect 인식기반으로운전자상태 (Normal, Drowsy, Inattentive, Unresponsive) 를판별하여, 차량의운전제어권을결정함으로써, 운전자를보조하거나제한된환경에서스스로운전하는자동차와운전자간협력형주행기술개발 (2) 주요연구내용 Co-Pilot 운전제어권결정기술 < 그림 3-56> Co-Pilot 시스템개념도 운전자 / 도로 / 차량상태인식기반 Co-Pilot 운전제어권결정 SW - 운전부하이상 (drowsy, sleeping, inattentive, unresponsive) 기반동적운전제어권할당알고리즘 - 주행상황 ( 도로상태, Co-Pilot 에이전트상태 ) 분석기반동적운전제어권할당알고리즘 - 운전제어권모드결정알고리즘 (Driver Only, Driver Assisted, Co-Pilot Driving, Emergency, Minimum Risk Maneuver 모드 ) Co-Pilot 운전자상태판단기술 - 운전자시선기반 Co-Pilot 운전자상태 ( 주의 / 부주의 ) 판단엔진 - 운전부하 Underload 판단알고리즘 : 비전 /IR 융합인식 - 운전자무반응상태판단알고리즘 : 생체 / 차량정보연계인식
, 정 / 동적장애물인식및추적알고리즘 - 도로인프라 ( 신호등, 횡단보도 ) 인식알고리즘 Co-Pilot 판단 / 제어처리기술 - Co-Pilot 실시간경로계획및행동제어 SW - 융합맵 /V2X/3D 주행환경인식기반으로주행상황판단및예측알고리즘 - 운전자 / 에이전트주행이력기록및패턴분석기반행동제어및경로계획알고리즘 -")
97 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 - 운전부하 Overload 상태판단알고리즘 : 차내정보기기연계인식 - 운전자상태통합판단및예측엔진 Co-Pilot 주행환경인식기술 - 3D 환경정보를이용한주행공간및도로인프라인식통합 SW - 2/3D Lidar 정보및카메라영상정보융복합을통한 3차원환경모델링및인식알고리즘 - 3차원도로주행공간 ( 차선, 도로 / 비도로영역, 공사구간 ), 정 / 동적장애물인식및추적알고리즘 - 도로인프라 ( 신호등, 횡단보도 ) 인식알고리즘 Co-Pilot 판단 / 제어처리기술 - Co-Pilot 실시간경로계획및행동제어 SW - 융합맵 /V2X/3D 주행환경인식기반으로주행상황판단및예측알고리즘 - 운전자 / 에이전트주행이력기록및패턴분석기반행동제어및경로계획알고리즘 - 실시간차량용융합맵데이터처리및분석 SW - 동적융합맵영역에대한실시간융합맵데이터 Push 처리알고리즘 - 융합맵데이터분석기반주행불가능지역 Isolation 및예측알고리즘 (3) 주요성과 Co-Pilot 시스템은운전자상태인식, 주행환경인식, 운전제어권결정, 코파일럿에이전트 ( 주행상황판단및행동결정, 실시간경로계획 ), 차량모션제어 SW 기술별로연구개발 < 그림 3-57> Co-Pilot 시스템구조
98 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 나. 스마트자율협력주행도로시스템개발 (2017, 한국교통연구원 ) (1) 개발목적 자율협력주행을위한자동차와도로시스템의역할을규명하고, 자율주행차의운행을위한도로시스템개발을위한중장기로드맵을수립하여제시하고, 정책지원을위한방안을마련 자율주행차를수용할수있는첨단도로시스템을구축하고자율협력주행을위해개발되는기술과서비스들의성능을분석 첨단도로시스템에서자율협력주행이구현될수있는서비스와추진과제를도출해제시하며자율협력주행을위한새로운도로운영체계를수립하고도로시스템단계를정의하고기술과서비스를정의하여단계별도로인프라를구축하도록정책적방향을제시하고자함 (2) 주요연구내용 자율협력주행기술개발현황및변화전망 - 자율주행차기술단계를정의하고, 프로세서및주요기능등을파악 - 자율협력주행시장및전망, 자율협력주행기술현황및전망, 자율협력주행특허동향분석등을통해시장형성과기술개발의추이를파악 - 현국내기술수준및기술격차파악, 국가별정책추진계획과동향분석등을통해국내대응방안과법제도마련방향을정립 - 국외연구개발추진전략과추진과제를파악하여국내전략수립시참고, 향후자율주행차의정책여건전망및세부전망과대응을제시 차량과도로의협력및역할정립 - 자율주행차량과도로의역할을정립하기위해자율주행기술과자율협력주행기술을상세분석하고, 자율협력주행서비스와구현수준등을정의 - 자율주행차량과도로의협력서비스구현목표설정등을통해서비스구현에필요한기능을차량과도로, 차량과도로협력부분으로구분하여역할정립 - 도로인프라구축과연구개발필요성을제시 (Physical 인프라, Digital 인프라, Logical 인프라 ) 도로인프라구축전략과추진로드맵 - 자율협력주행서비스와제공전략을설정하고자율주행서비스보급시나리오및기술전략을설정함 - 자율협력주행서비스제공추진과제도출을위해전문가설문지및전문가자문회의를실시, 서비스우선순위를결정하고중장기로드맵을작성하여세부실행계획과추진주체및역할등제시 (3) 주요성과 자율주행기술과관련하여인프라동향및환경을분석하였음 현재기술분야의동향에대한다양한기초자료를수집하여자율주행차량의기술한계부분을파악하

99 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 고, 자율주행기술한계에따른도로인프라기반시설및정보제공체계에대해자율협령주행서비스와제공전략을설정하고이를구현하기위한추진과제도출 자율협력주행의한계및필요성, 차량과도로의연계서비스및연계시스템운영방안, 자율주행차와도로의연계를위한기능, 차량과도로의협력체계및역할을정립함 각국의자율주행차의정책과기술개발현황및추진로드맵개발상황파악 우리나라실정에맞는자율주행도로인프라정책추진방향수립및자율협력주행서비스도출을위한로드맵을커뮤니티마을, 중소도시, 대규모도시서비스단위로수립제시하였고각서비스단위별로 Physical, Digital, Logical 인프라구축계획제시다. 자율주행을위한교통안전정보제공방안연구 (2017, 도로교통공단교통과학연구원 ) (1) 개발목적 자율주행을위한교통안전시설의개선방향을마련하고도시교통정보센터에교통안전정보플랫폼을구축하여자율주행을위한교통안전정보 ( 돌발정보, 교통안전시설정보 ( 교통안전표지, 노면표시, 신호등 )) 를제공하기위한토대를마련 < 그림 3-58> 자율주행교통안전정보제공체계 (2) 주요연구내용 자율주행을위한교통안전시설개선방향설정 - 교통안전시설 ( 신호등, 교통안전표지, 노면표지 ) 개선방향설정 자율주행을위한교통안전시설개선방향설정을위한설문조사 - 자율주행차의교통안전시설인식율조사 - 자율주행을위한교통안전시설개선우선순위선정

100 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 자율주행을위한교통안전시설개선방향설정을위한전문가자문 자율주행을위한돌발검지알고리즘개발 - 신경망을이용한돌발상황검지알고리즘개발 (3) 주요성과 돌방상황검지알고리즘개발 - 도시교통정보센터에서제공하는구간통행속도정보를활용해돌발상황을검지하는알고리즘을개발하고성능평가 신경망을이용한돌발상황검지알고리즘개발 - 패턴인식및분류분야에서높은정확도를보이는신경망을활용한알고리즘개발 < 그림 3-59> 신경망을이용한돌발상황검지알고리즘 < 그림 3-60> 돌발상황검지알고리즘
101 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 라. 모빌리티정보공유형인공지능센터구축및요소기술개발기획 (2016, 한국건설기술연구원 ) (1) 개발목적 다양한모빌리티정보를공공과민간에서비스하여미래교통수단간, 도로관리자와운전자간, 도로관리자와민간기업간정보연계성을강화하여궁극적으로도로네트워크최적화달성및새로운비즈니스영역을구축하기위한인공지능기반모빌리티정보플랫폼구축및관련요소기술을개발 (2) 주요연구내용 모빌리티정보인프라표준개발 - 모빌리티정보현황분석및서비스기본설계 - 공공및민간데이터종류 출처 수집 현황분석 - 모빌리티정보제공기술동향분석 - 모빌리티정보수집 연계기술개발 - 데이터수집 연계인터페이스설계및개발 - 인공지능기반모빌리티정보표준설계및개발 - 인공지능기반데이터처리표준화방안마련 - 데이터품질관리방안설계및개발 - 데이터무결성및신뢰성향상을위한구체적인데이터품질관리방안 모빌리티정보제공을위한원천기술개발 - 자율협력주행기반교통운영기술개발 - 나노공간기반교통운영및안전효율성향상을위한정보제공기술개발 - 자율차기반공유서비스운영에필요한정보제공기술개발 - 도로위험도예측기술개발 - 도로위험도정보인덱스정립 - 도로위험도예측알고리즘개발 - 맞춤형모빌리티정보제공을위한이종 동정데이터융합 처리기술개발 - 모빌리티정보활용을위한처리기술개발 - 빅데이터융합 처리기술개발 모빌리티정보플랫폼구축및서비스개발 - 모빌리티정보플랫폼개발및구축 - Cloud 기반 Open형스마트플랫폼아키텍처설계 - Cloud 기반 Open형스마트플랫폼개발및구축
 주요성과 모빌리티정보인프라표준개발 - 데이터품질관리매뉴얼 - 데이터수집및제공관련설계서 - 자율차기술수준을고려한데이터연계표준설계서 - 빅터이터정보수집인터페이스설계서 - 차량-인프라정보연계자동화SW")
102 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 - 모빌리티정보공유기술개발 - 모빌리티정보공유서비스를위한 SW 설계및개발 - 맞춤형모빌리티정보제공기술개발 - 모빌리티정보제공시스템개발 모빌리티정보효과평가 - 단위원천기술별평가 - Hardware-in-Loop 기반단위기술평가 - Software-in-Loop 기반단위기술평가 - 모빌리티정보효과분석및평가 - 시뮬레이션기반모빌리티정보제공효과평가 - 실증테스트기반모빌리티정보제공효과평가 < 그림 3-61> 세부기술간연계도 (3) 주요성과 모빌리티정보인프라표준개발 - 데이터품질관리매뉴얼 - 데이터수집및제공관련설계서 - 자율차기술수준을고려한데이터연계표준설계서 - 빅터이터정보수집인터페이스설계서 - 차량-인프라정보연계자동화SW

103 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 모빌리티정보제공을위한원천기술개발 - 나노공간기반자율협력주행효율및안전성평가알고리즘 - 데이터융 복합기반도로위험도판단알고리즘및인덱스 - 인공지능기반분석데이터활용알고리즘 모빌리티정보플랫폼구축및서비스개발 - 모빌리티정보플랫폼 / 플랫폼관리포털 (Platform Management Portal) - 모빌리티정보고유서비스시스템설계서 - 도로위험도정보제공서비스시스템설계서 - 맞춤형모빌리티정보제공서비스시스템설계서 모빌리티정보효과평가 - Hardware-in-Loop/Software-in-Loop 실험매뉴얼 - 모빌리티정보효과평가를위한효과척도개발 - 모빌리티정보효과평가매뉴얼 / 실도로테스트매뉴얼마. 자율주행자동차의실시간제어를위한고속 V-Link 통신기술개발 (2016, 한국전자통신연구원 ) (1) 개발목적 고속으로이동하는차량환경에서차량주변의위험상황정보와차량제어정보를전달하기 여 100Mbps 급무선전송과 5 msec 급 Latency 를갖는무선전송모뎀기술개발 위하 - 100Mbps급 PER=0.01% 를만족하는 V-Link 통신모뎀기술 - 5msec급 Low Latency를제공하는광대역 V-Link 통신 MAC 기술 - V-Link 무선전송기술표준화 - V-Link 통신기술적용을위한서비스및단말기술 < 그림 3-62> V-Link 기술개념도
104 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 (2) 주요연구내용 100Mbps급 PER=0.01를만족하는 V-Link 무선전송규격개발 - WAVE와호환성을제공하기위한채널대역폭가변이가능하고대역폭을통합으로운용할수있는모뎀기술설계 - 차량고속이동환경 (400Km/h) 에서의 OFDM 모뎀채널추정알고리즘연구 - 다중경로채널환경에서 PER 0.01% 를만족하는동기알고리즘연구 5msec급 Low Latency를제공하는 V-Link MAC 규격개발 - 정보유형 ( 차량제어데이터, 경고데이터, 상황데이터 ) 에따른 QoS 관리및 Packet Scheduling 규격설계 - 다수의차량환경에서 Low Latency를제공하기위한 MAC scheduling 알고리즘연구 고속 V-Link 국내외표준화활동 - 국내 TTA에고속 V-Link 무선전송기술표준화제안 - 국제표준화기구 (3GPP) 의 V2X 표준화동향분석및협력기반조성 V-Link 서비스를위한메시지규격및단말설계 - 자율주행서비스에필요한 V-Link 통신요구사항정의 - WAVE와의호환성을위한 V-Link 단말설계 - 차량내부망 (CAN) 연계 V-Link 응용메시지규격설계 (3) 주요성과 100Mbps급 PER=0.01를만족하는 V-Link 무선전송규격개발 - 54Mbps 무전전송방안제안및모뎀시뮬레이션완료 - 200km/h 무선환경에서시뮬레이션완료 - (V-Link) 요구사항정의서 - (V-Link) 시스템기능규격서 - V-Link 모뎀구조및 PHY 기능설계서 - Enhanced TRFI 채널추정알고리즘설계 5msec급 Low Latency를제공하는 V-Link MAC 규격개발 - 50msec 시뮬레이션완료 - 저지연 V-Link 통신 MAC 기능규격 - V-Link 패킷스케줄링알고리즘개발
105 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 - 저지연다중접속 MAC 알고리즘 ( 연구보고서 ) - 가변 Interval 조정알고리즘구조설계및시뮬레이션 V-Link 서비스를위한메시지규격및단말설계 - BSM 요구사항정의서 - LDM 요구사항정의서바. 자율주행대중교통안전성향상을위한스마트인프라핵심기술개발 (2017, 한국철도기술연구원 ) (1) 개발목적 자율주행차가도로상의모든정보를스스로인지-판단-제어를지원하기위해도로시설을개선하여자율주행차를지원하는기술개발필요 자율주행대중교통을위한인프라연결기술필요 교차로등혼재구간에서자율주행대중교통은안전성확보에많은제약이있어, 인프라에설치된시스템에서차량들의정확한공간정보를명확히하여지원하는기술요구 (2) 주요연구내용 인프라기반인지및운행성능향상기술개발 - 인프라기반전용노선준동적교통상황인지기술개발 - 교통상황의 V2X 통신시스템개념설계 - 전용노선의인프라보강기초기술개발등 자율주행대중교통 ( 바이모달트램, PRT 등 ) 인프라다중센싱시스템개발 - 다중센싱시스템이용전용노선상태감지핵심기술개발 - 전용노선인프라센싱핵심기술및진단평가기술개발 - 센싱신호분석알고리즘개발 - 전용노선인프라연계야간및악천후인지성능기초기술개발 PRT 원 / 근거리차량원격, 근거리상황감시정보획득 ( 센싱 ) 기술개발 무인트램주행제어시스템기술개발 - 무인트램차량운행제어기술개발 - 무인트램차량통합제어장치개발 (3) 주요성과 인프라기반인지및운행성능향상기술개발 - 영상인식을통한자율주행교차로통과지원기술개발및통합플랫폼요소기술개발
106 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 - 대중교통자율주행 V2X 통신시스템설계 - 전용노선의인프라보강기술개발및균열치유기술개발 자율주행대중교통 ( 바이모달트램, PRT 등 ) 인프라다중센싱시스템개발 - 레이저 / 비전및열화상기반전용도로상태모니터링시스템기본설계완료및시험평가 - 레이저 / 비전및열화상신호분석알고리즘설계및 Lab실험및평가 - 3D 라이다를활용한악천후시주변신호처리알고리즘개발완료및 Lab 실험을통한성능검증 PRT 원 / 근거리차량원격, 근거리상황감시정보획득 ( 센싱 ) 기술개발 - 차량제어프로세스및테스트시나리오정의 - 교통신호등기구물 / 제어기설계및제작 - PRT 교통신호제어기통합테스 무인트램주행제어시스템기술개발 - 무인트램차량운행제어기술요구사항 / 시스템구조 / 장치별기능정의 - 무인트램차량제어알고리즘설계및시뮬레이션평가 < 그림 3-63> 통합플랫폼하드웨어구성도 사. V2X 네트워킹및응용기술과 Geo 시맨틱표준개발 (2012, 한국전자통신연구원 ) (1) 개발목적 주행차량의상황인지및실시간정보처리를위해차량과무선통신기술결합의핵심인차량모바일게이트웨이기반의네트워킹및응용표준 V2X 개발과분산된공간정보를유기적으로연동하기위한시맨틱공간정보처리및공간센서기반의응용서비스표준개발을위함
107 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 (2) 주요연구내용 V2X 국제표준화주도권확보및공간정보표준화기반구축 - V2X 네트워킹의핵심인차량모바일게이트웨이 (VMG) 유즈케이스국제표준초안개발 - 차량모바일게이트웨이프로토콜설계및프로토타입구현 - V2X 응용기술및서비스표준초안개발 - V2G (Vehicle-to-Grid) 통신인터페이스표준화참여 - GeoOntology 기술 / 표준화동향분석및서비스프레임워크개발 - GeoSensor 기술 / 표준화동향분석및센서관측국내표준개발 V2X 국제표준본격개발및시맨틱공간정보프레임워크개발 - ISO TC204 차량모바일게이트웨이프로토콜국제표준초안개발 - 차량정보기반 ITS/ 텔레매틱스서비스지원을위한차량모바일게이트웨이구성요건검증 - 전기차와충전기간의프로토콜요구사항표준개발지원 - 시맨틱공간정보서비스를위한기능요구사항개발 - GeoSensor 데이터처리및서비스를위한표준개발 - 실내공간모델구축및활용을위한표준개발 V2X 국제표준선도및실내공간모델표준개발 - ITS 서비스제공을위한차량정보의국제표준 (ISO TC204) IPR 확보 - VMG 기반의차량-노매딕응용테스트베드구축 - 전기자동차와스마트그리드연계를위한 ICT 표준개발 - 시맨틱공간정보서비스를위한온톨로지모델개발 - 노드 / 링크체계기반실내공간모델의구성및활용지침표준개발 (3) 주요성과 V2X 네트워킹및응용을위한 VMG 국제표준개발 NGN 연동을위한네트워크차량프레임워크국제표준제정 (ITU-T SG13) 전기차충전통신국내외표준활동선도 시맨틱공간정보표준프레임워크개발, 공간센서기반의응용서비스표준개발 실내공간정보표준프레임워크개발


108 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 < 그림 3-64> V2X 네트워킹및응용기술분야 (ISO 13185) 표준화범위 < 그림 3-65> 시맨틱공간정보의서비스프레임워크 아. ITS 서비스성능평가및인증을위한시뮬레이션플랫폼기술개발 -시뮬레이터프로토타입개발및검증 (2017, 한국교통대학교 ) (1) 개발목적 V2X 기반의 C-ITS 교통안전서비스의정확한성능평가및인증을위해 V2X 무선채널특성, 물리계층, MAC 계층, 네트웍및어플리케이션계층, 그리고트래픽시뮬레이터가통합된시뮬레이션플랫폼프로토타입을구현하고, 이를이용한 C-ITS 안전서비스의성능검증을통해통합시뮬레이션플랫폼의유효성및우수성을검증하는것을목표로함
109 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 (2) 주요연구내용 교통시뮬레이션을위한 V2X 무선채널시뮬레이터개발 IEEE802.11p 물리계층링크레벨시뮬레이터구현 IEEE802.11p MAC 계층시뮬레이터구현 V2X 네트워크에서멀티홉데이터 dissemination 및응용을시뮬레이션할수있도록기존시뮬레이터확장 각계층간연동및교통시뮬레이터와의연동을위한 API 개발 통합시뮬레이터검증 (3) 주요성과 3차원레이트레이싱을이용한도심환경과고속도로환경에서의 delay와 Dopper spread 채널측정및모델링 WINER-II 경로손실모델의 5,9GHz 대역 V2V 채널환경에서의적합성검증 IEEE802.11p 물리계층시뮬레이터를 MATLAB으로개발 시뮬레이터에 Preamble 및 Frame body capture 기능구현하며또한, 시간및주파수동기알고리즘, 채널추정알고리즘구현 Prescan 시뮬레이터에무선채널시뮬레이터와연동하여환경에따른패킷송수신성공여부결정기능구현 Matlab simulation을통한 IEEE p/IEEE 기반 MAC 계층의송수신단구현및 Markov chain model 기반의 EDCA 구현. priority 기반 AC에따른 backoff 구현후기존시스템검증 Spark의 GraphX와 NS-2를연동하는모듈설계및개발 V2X기반의VANET에서객체 ( 차량, 보행자, 이륜차, 인프라 ) 간의관계모델링 Prescan 시뮬레이터에다수차량들의각송수신 pair의수신 SNR을구하는 WINNER-II large scale 무선채널시뮬레이터를 MATLABsimulink로구현 V2X 통신환경에서성능향상을위한협력통신기법의적용가능성검증을위한성능분석기법및시뮬레이터구현 Matlab simulink를이용하여구현된 MAC 계층시뮬레이터를 Labview 기반으로 PreScan 상에서동작가능하도록연동및 MAC 프로토콜의성능검증 교차로에서차량의밀집도와이동속도에따른 BSM 패킷의송수신성공률, 이에따른차량충돌예
110 제 3 장국내 외자율주행운행체계및교통인프라동향및환경분석 측및경고안전서비스의성공여부를실험하는시뮬레이션을수행하고, 이에대한분석을통해통 합시뮬레이터의성능과유효성검증 자율주행관련연구기관 국내산 학 연연구기관이수행한자율주행에관련연구프로젝트는아래표와같음 < 표 3-14> 국내자율주행관련산 학 연연구기관현황 구분기관명주요수행프로젝트 대학 산업계 연구소 경북대학교 계명대학교 국민대학교 서울대학교 성균관대학교 순천향대학교 아주대학교 연세대학교 인천대학교 인하대학교 충북대학교 KAIST 한양대학교 한국교통대학교 현대기아자동차 르노삼성자동차 타타대우자동차 쌍용자동차 모비스 만도 ETRI 자동차부품연구원 한국교통안전공단 한국건설기술연구원 국토연구원 한국교통연구원 2017 대학생자율주행경진대회 2017 대학생자율주행경진및자동차기술공모전등자동차부품전자화기술 2017 대학생자율주행경진대회및제 13 회미래자동차기술공모등무인자율주행차량및알고리즘개발, 고안전주행보조시스템등연구수행 제 13 회미래자동차기술공모, 자율주행자동차경진대회등자동차기술개발 2017 대학생자율주행경진대회및자율주행자동차경진대회등참여 2017 대학생자율주행경진대회 제 13 회미래자동차, 자율주행자동차경진대회, C.V.O 연구 제 13 회미래자동차기술공모전 : 자율주행자동차경진대회 제 13 회미래자동차기술공모전 : 자율주행자동차경진대회 2017 대학생자율주행경진대회및자동차동력계부품관련기술및인력교육 2017 대학생자율주행경진대회및제 13 회미래자동차기술공모전 제 13 회미래자동차기술공모전 : 자율주행자동차경진대회 교통시뮬레이션, 도로시설물설계, 교통안전분야, 차량간통신, 교통정보가공 국내최초자율주행셔틀버스개발및캠퍼스내운영 자율주행요소기술연구개발 스마트자율협력주행도로시스템참여 미국교통부커넥티드카프로젝트 (VSC3) 참여 스마트자율협력주행도로시스템참여 모기업인르노자동차와자율주행기술연구개발 새만금상용차 ( 트럭 ) 자율주행실증참여 모기업인타타자동차와자율주행기술연구개발 스마트자율협력주행도로시스템참여 자율주행자동차센서, 제어알고리즘, 액츄에이터연구개발 자율주행자동차센서, 제어알고리즘, 액츄에이터연구개발 차량용 77GHZ 측후방레이더신호처리및고성능자율주행프로세서기술 정보, 통신, 전자, 방송융 복합기술분야의산업원천기술개발 자동차부품의연구개발, 시험인증, 교육및정보제공 자율주행자동차 (LV2,3) 에대한안전성평가방법및제도연구개발 첨단교통요소기술및자율협력주행 (C-ITS 등 ) 기술개발연구 자율주행시대를대비한첨단도로인파르의전략적관리방안연구 V2X 통신인프라를활용한네트워크신호운영알고리즘개발및성능검증 사업용차량을이용한도로교통상황정보수집및활용기술개발기획
111 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 편집상여백
112 제 4 장연구개발과제구성 제 4 장연구개발과제구성 4.1 비전및목표 비전 자율주행시스템은 4차산업혁명을주도하는핵심산업분야로세계각국은자율주행차임시운행제도시행과제한적자율주행운행을통해자율주행차시대를준비하고있으며국내의경우 2020년자율주행차레벨3( 운전자개입필요 ) 상용화를목표로기술개발과인프라구축, 제도개선을추진중임 자율주행차의도로운행은도로교통시스템과의협력적관계가필수적으로안전한주행을지원하기위한교통안전시설개선방안, 교통안전정보수집및제공방안등이마련되어야함 자율주행차시대준비대응으로실제도로운행을위한법제도정비및운행체계틀마련, 교통인프라기술개발을통한자율주행자동차의안전확보및선제적교통운영체계구축을미션으로함 비전및미션달성을위해서는자율주행운행체계및 AI 안전운전능력검증, 자율주행지원을위한신호제어기술및교통안전시설운영관리기술개발이필요함 < 그림 4-1> 연구개발비전및목표 목표 자율주행차와관련된운전면허, 교통사고, 운전능력검증등운행체계및교통안전시설인프라개발로자율주행을위한상용화기반구축 - 자율주행차의공공도로운행을위한운행체계및 AI 안전운전능력 ( 법규및안전, 수신호인지등 ) 검증방법론, 기준등개발
113 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 - 자율주행차와일반차량이혼재된상황에서 AI 기반의스마트신호제어를위한현장장치및관제센터기술개발 - 자율주행차의안전운행을위한교통안전시설물 ( 신호등, 표지판등 ) 관리체계및현장 IoT 정보제공기술개발 < 표 4-1> 연구개발항목별목표 구분운행체계개발 AI기반신호제어교통안전시설정보제공 Test-Bed구축및효과평가 목표 자율주행면허발급및관리체계등자율주행차운행체계마련, AI 법규및안전수칙준수능력검증기준개발 자율주행차와일반차량이혼재해운영되는도로환경에서 AI 기반의스마트신호제어를위한현장장치및관제센터기술개발및실증 IoT 기반으로교통안전시설물의규제정보를제공하고, 관리하기위한스마트교통안전시설운영관리기술개발 AI 기반신호제어, IoT 기반교통안전시설, AI 운전능력검증단지등 Test-Bed 구축및효과평가 기대효과 자율주행교통인프라환경구축을통한자율주행차상용화촉진 자율주행차관련발전방안연구를수행함으로써관련국제기준선도및기술개발방향성제시 자율주행발전방안및인프라환경의효율적인연계로활용기술개발및고도화추진 자율주행차운전능력평가 검사기술상용화개발로국내기술산업육성및글로벌기술경쟁력우위확보 자율주행차검사제도도입을통해조기결함발견및위험도최소화를통한국민의안전확보, 사고비용감소 통신, 전자, 교통안전시설기술개발을통해제조업을비롯한여러산업의새로운일자리를창출 연구개발결과활용방안 본연구개발결과는자율주행차의운전능력검사체계마련을통해자동차검사표준모델로활용이가능하며검사관련제도개선기초자료로활용이가능 자동차검사항목및기준개발, 교통안전인프라장비실용화개발로교통운영기술향상및관련스마트도시교통 R&D등에활용 신호시스템및운영관리기술전국적 ( 지방자치단체 ) 보급, 교육을통해자율주행차도로주행반기술및표준화기술로활용 국가기
114 제 4 장연구개발과제구성 4.2 연구개발과제범위 연구개발요구사항가. 연구개발요구사항분석절차 기존교통운영체계및교통인프라의자율주행대응한계점과문제점조사 기술개발특성에따른성능기준, 적용성및요구사항조사나. 기술요구사항분석방법 산 학 연전문가를대상으로교통운영및인프라관련기술에대한자문을통해결과를도출함 현재기술수준에대한항목, 성능목표에대한항목, 기타기술요구사항에대한항목을바탕으로조사를진행함 요구사항분석가. 자율주행관련운행체계및 AI 안전운전능력검증체계개발 (1) 발전방안연구 자율주행차교통경찰현장지시및통제 - 경찰공무원의현장지시및통제방안개발 - 지시및통제가필요한사고상황제시 - 통제시요구되는교통안전시설물 - 교통경찰 ( 안전요원 ) 의수신호인식및판단, 제어알고리즘개발, 검증 - 자율주행차량단속프로세스및알고리즘개발, 검증 ( 교통법규위반, 불법개조등 ) 자율주행차교통사고처리 - 사고기록장치항목및장착기준 - 초동조치요령및조사방법 - 현장조사시스템의구축및운영 - 실황조사서의항목개발 - 주행및사고상황의정보분석이가능한장치의무탑재 - 정보기록장치의접근권한마련 - 다양한사고상황에이대한정의및책임소재체계정립
115 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 (2) AI 안전운전능력검증시스템 AI 안전운전능력평가기준및검증체계 - 자율주행 AI 알고리즘에대한분류를바탕으로제한적시나리오에서의테스트가다양한교통상황에서안전을담보할수있도록선택 - 도로종류및주행상황별요구운전능력수준정의 - 자동차전용도로, 도심도로등도로별요구운전능력수준정의 검증시스템적용시험단지구축방안연구 - 다양한도로조건및시나리오상에서구현가능하도록시험단지구축방안마련 - 각자율주행단계별인공지능기술에따른도로요소기술검증 상설시험구간이용 AI 운전자격부여제도및면허시스템연계 - 정보제공단계 (Level 1) 에서관리및제어단계 (Level 3 이상 ) 까지자율주행 AI 기술수준에따른단계적인운전자격부여에대한검토 (3) 자율주행운전면허실증단지구축방안연구 실증단지구축제반사항기획 - 시험평가센터등시험환경및지원인프라구성방안마련 - 자율주행차의차량관리및통제를위하여대량의데이터를관리할수있는인공지능기반 ITS 센터구축방안마련 (4) HILS기반 AI 운전능력검증시스템 검증시스템개발및활용 - 가상의시뮬레이션환경을통하여운전능력을진단할수있는실증평가시스템개발나. 자율주행위한 AI기반신호제어시스템개발 (1) 통신기반자율주행차신호규제를위한현장시스템 자율주행운행지원교통신호지역제어기개발 - 자율주행차운행지원교통신호제어기기능적요구사항분석 - 통신기반차량검지기술및감응제어기술확보, 통신보안성기술확보 - 스마트디지털제어기간정보연계모듈및신호제어기규격및인증방안개발 실시간신호운영을위한자율주행차운영전략개발 - 자율주행자동차의운행상태및경로모니터링기술개발 - 자율주행차정보수집장치및 DB 관리기술개발
116 제 4 장연구개발과제구성 자율주행환경신호교차로용량및안전성평가기술개발 - 자율주행차신호교차로용량분석기법개발 - 자율주행차운영신호교차로교통안전성분석기법개발 - 자율주행차신호교차로용량및안전성분석매뉴얼개발 (2) AI 기반통합신호관제시스템 자율주행차위치및경로정보이용신호교차로모니터링기술 - 자율주행자동차의운행상태및경로모니터링기술개발 - 네트워크교통흐름운영관리신호제어방안연구 AI 기반광역네트워크차원의최적신호운영기술 - AI 기술기반네트워크교통신호모니터링기반기술개발 - AI기반최적신호운영위한통합신호관제시스템개발 - 네트워크교통흐름운영관리신호제어기술개발 - 통합 AI 신호운영센터시스템 HILS 활용평가방안연구 통신기반개별차량감응제어 (Actuation Control) 기술 - AI 통신감응장치선정및적용성분석 - 자율주행환경교통신호현시표출체계개발 (3) HILS 기반자율주행신호운영시스템시뮬레이션평가체계구축 현장시스템-시뮬레이터-센터시스템 통합시뮬레이션평가기술 - 자율주행교통신호평가를위한 HILS 시스템개발 - 자율주행교통신호평가를위한시험환경설계및구축 - 개발된 HILS 시스템평가방안연구다. IoT 기반교통안전시설정보제공및운영관리기술개발 (1) 교통안전시설운영관리 교통안전시설규제정보공공개방전략 - 규제정보개방수준및정보개방전략수립 - 이용자접근환경및 V2X 환경에서보안관리방안 - 교통안전규제정보의신뢰성, 연속성을위한표준정립 교통안전시설관리를위한표준코드체계
117 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 - 교통안전시설물규제정보국외표준화사례검토 - 신호운영정보의 V2X 적용요구조건분석 - V2X 환경에서신호운영정보 (SPaT 메시지 ) 의적용방안검토 표준코드체계기반교통안전시설물정보관리시스템및관리기관용운영프로그램개발 - 자율협력주행을위한통합교통안전시설물정보생성기술 - 융합정보유지관리 ( 모니터링등 ) S/W 및센터운영자관리 S/W 자율주행차량제조사대상클라우드형정보제공체계 - 클라우드네트워크정보관리시스템구축 - 접속인증기술마련, DB이용환용제조사요구사항분석 (2) IoT 기반 V2X 기술 교통안전시설에적합한 IoT 장치기술 - IoT 교통안전시설통신장비및전원공급기술개발 - IoT 교통안전시설통신방어기술개발 현장기반 IoT 정보제공응용프로토콜기술 - IoT 교통안전시설정보제공응용프로토콜및 API 개발 - IoT 교통안전시설안정적무선통신방송기술개발 - IoT 교통안전시설통신실패시정보제공담보기술개발 교통안전시설정보수집을위한관리센터연동실시간소프트웨어개발 - 노변설치 IoT 교통노면표시정보수집장치및관리 SW 개발
118 제 4 장연구개발과제구성 < 표 4-2> 기술개발요구사항 자율주행관련운행체계및 AI 안전운전능력검증체계개발 자율주행을위한 AI 기반신호제어시스템개발 구분세부항목기술개발요구사항 발전방안연구 AI 안전운전능력검증시스템 자율주행운전면허실증단지구축 HILS기반 AI 운전능력검증시스템통신기반자율주행차신호규제를위한현장시스템 AI 기반통합신호관제시스템 HILS 기반자율주행신호운영시스템시뮬레이션평가체계구축 자율주행관련발전방안연구 자율주행차운전면허발급및면허체계 자율주행차교통경찰현장지시및통제 자율주행차교통사고처리 AI 안전운전능력평가기준및검증체계 검증시스템적용시험단지구축 상설시험구간이용 AI 운전자격부여제도및면허시스템연계 실증단지구축제반사항기획 검증시스템개발및활용 실시간신호운영을위한자율주행차정보수집기능기술 자율주행차위치및경로정보이용신호교차로모니터링기술 AI 기반광역네트워크차원의최적신호운영기술 통신기반개별차량감응제어 (Actuation Control) 기술 자율주행차운행경로최적화를통한정체관리기술 현장시스템-시뮬레이터- 센터시스템 통합시뮬레이션평가기술 도로교통법기반정비 면허발급기준및평가방법마련 교통경찰업무및정보수집체계 사고처리기술및행정절차마련 운전능력평가시나리오개발및평가방법 시험단지구축단계별요구사항 상설시험구간요건및운영방안 실증단지구축단계별요구사항 검증시스템평가및활용방안마련 차량 - 차량, 차량 - 도로 ( 인프라 ) 간지속적인데이터공유, 시호제어기연계서비스규격화필요 신호정보와자율주행차정보의융합, 교차로및링크정보를활용한분석알고리즘및평가방안필요 광역간, 도시간 AI 신호운영알고리즘및현장상황모니터링기술필요 자율주행및비자율주행차량검지, 융합DB 생성기술필요 운영경로갱신및정체관리솔루션개발 HILS 구조및현장-시뮬레이션피드백연계방안및평가체계마련
119 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 표계속 > 기술개발요구사항 IoT 기반교통안전시설정보제공및운영관리기술개발 구분 세부항목 기술개발요구사항 교통안전시설규제정보공공개방전략 규제정보범위및활용처공유방안 교통안전시설운영관리 IoT 기반 V2X 기술 교통안전시설관리를위한표준코드체계 표준코드체계기반교통안전시설물정보관리시스템및관리기관용운영프로그램개발 자율주행차량제조사대상클라우드형정보제공체계 교통안전시설에적합한 IoT 장치기술 현장기반 IoT 정보제공응용프로토콜기술 교통안전시설정보수집을위한관리센터연동실시간소프트웨어개발 표준코드마련및시설분류, 전국통합관리방안 프로그램효용성및시설관리이력표출방안 제조사요구사항및갱신주기, 업데이트현장반영체계 장치운영경제성및관리효율성 통신보안성및미래기술변화고려 연동정확성평가방안마련 과제구성 자율주행차의도로주행을위한운행체계및교통인프라개발 과제는총 3 개과제로구성하며과제별 3~4 개의세부과제로구성함 - 과제 1 : 자율주행관련운행체계및 AI 안전운전능력검증체계개발 - 과제 2 : 자율주행을위한 AI 기반신호제어시스템개발 - 과제 3 : IoT 기반교통안전시설정보제공및운영관리기술개발 가. 범위 연구개발사업은 ( 과제 1) 자율주행운행체계에대한제반사항을정비, 개선하고 AI 운전능력에대한평가및검증관련시스템, 시험장및운영방안등을개발하고, ( 과제 2) 자율주행을위한 AI 기반의신호제어, 통합관제, 현장장치등을개발함 ( 과제 3)IoT 기반의교통안전시설정보제공및관리기술을개발하고도심교차로환경에서실증을거쳐현장적용성을확보함 나. 대상 자율협력주행시스템을구성하는 AI 운전능력평가와교통인프라 ( 교통안전시설, 통신인프라, 관제센터등 ), AI 시험환경구축 다. 개발기술 자율주행차정보제공기술및자율주행차성능평가기술, 교통안전시설관리기술 라. 운영주체 교통운영을담당하는경찰및지방자치단체, 자율주행차제작사및안전서비스를제공할수있는민간, ICT 기업등
120 제 4 장연구개발과제구성 < 표 4-3> 과제구성 분류과제명세부과제개발내용 과제 1 과제 2 과제 3 자율주행관련운행체계및 AI 안전운전능력검증체계개발 자율주행을위한 AI 기반신호제어시스템개발 IoT 기반교통안전시설정보제공및운영관리기술개발 1-1 자율주행관련운행체계개발 1-2 자율주행 AI 안전운전능력검증시스템개발 1-3 자율주행운전면허실증단지구축방안연구 2-1 통신기반의자율주행차신호규제를위한현장시스템개발 2-2 AI 기반통합신호관제시스템개발 2-3 HILS 기반자율주행신호운영시스템시뮬레이터개발 2-4 중 소도시실증사업설계 / 구축 / 운영 / 평가 3-1 자율주행차를위한교통안전시설운영관리기술개발 3-2 IoT 기반교통안전시설물인식기술개발 3-3 도심교차로환경통합실증
121 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 표 4-4> 과제별주요연구내용 구분과제명주요연구내용 과제 1 과제 2 과제 3 자율주행관련운행체계및 AI 운전능력검증체계개발 자율주행을위한 AI 기반신호제어시스템개발 IoT 기반교통안전시설정보제공및운영관리기술개발 자율주행차의공공도로주행관련발생현안에대한운행체계방향성설정 자율주행 AI 안전운전능력검증시스템연구개발 자율주행운전면허실증단지구축방안연구 통신기반의자율주행차신호규제를위한현장시스템개발 AI 기반통합신호관제시스템개발 AI 기반통합신호운영센터시스템개발 자율주행신호운영시스템중소도시실증사업기획연구 3-1 IoT 교통안전시설개발 IoT 교통안전시설센터시스템개발 IoT 자율주행차교통안전시설운영관리실용기술개발 IoT 교통안전시설실증평가 자율주행운행체계요구사항및방향성 / 타당성제시 자율주행 AI 운전능력검증시나리오개발및단계적운전능력검증프로세스및검증시스템개발방향설정 가상인지환경기반 SILS/HILS 평가모듈개발 자율주행 AI 안전운전능력검증통합체계평가 자율주행 AI 운전능력검증통합체계기반실증시험단지구축 자율주행차량교차로교통신호운영전략및규제지원방안도출 자율주행환경신호교차로용량및안전성평가기술개발 AI 신호운영기술개발 자율주행자동차정보수집및활용기술개발 자율주행신호운영시스템 HILS평가체계구축 AI 신호운영 DB 구축 관리기술개발 통합신호운영센터시스템개발 중소도시실증사업추진계획수립및효과분석 IoT 교통안전시설통신장비, 전원공급, 보안기술개발 교통안전시설관리기관운영관리정보플렛폼개발 자율주행차량대상클라우드형정보체계구축 교통안전시설관리위한표준코드체계개발 교통안전시설규제정보공공개방전략수립 자율주행환경교통안전시설실증시나리오개발및시험
122 제 5 장연구과제추진전략 제 5 장연구과제추진전략 5.1 과제별주요연구추진내용 연구목표 연구목표는자율주행관련운행체계및 AI 운전능력검증, AI 기반신호제어시스템개발, IoT 기반교통안전시설정보제공및운영관리기술개발을주요목표로하며그에따른연구내용은 < 표 5-1> 과같음 < 표 5-1> 연구목표및주요연구내용 구분 목표 내용 자율주행관련운행체계및 AI 안전운전능력검증체계개발 자율주행을위한 AI 기반신호제어시스템개발 IoT 기반교통안전시설정보제공및운영관리기술개발 자율주행관련운행체계및 AI 안전운전능력검증체계개발 가상환경기반운전능력평가시뮬레이션구축방안개발 가상환경기반운전능력평가시뮬레이션요소기술개발 가상환경기반운전능력평가시뮬레이션응용기술개발 가상환경운전능력평가프로토타입개발 주요연구내용 자율주행을위한 AI 기반신호제어시스템개발 통신기반자율주행차신호규제를위한현장시스템개발 AI 기반통합신호관제시스템개발 HILS기반자율주행신호운영시스템시뮬레이터개발 중 소도시실증사업설계 / 구축 / 운영 / 평가기술개발 IoT 기반교통안전시설정보제공및운영관리기술개발 자율주행차를위한교통안전시설운영관리기술개발 IoT기반교통안전시설물인식기술개발 도심교차로환경통합실증연구기획 자율주행관련운행체계및 AI 안전운전능력검증체계개발목표는가상환경기반운전능력평가시뮬레이션구축방안개발, 가상환경기반운전능력평가시뮬레이션요소기술개발, 가상환경기반운전능력평가시뮬레이션응용기술개발, 가상환경운전능력평가프로토타입개발로나뉨 자율주행을위한 AI 기반신호제어시스템개발목표는통신기반자율주행차신호규제를위한현장시스템개발, AI 기반통합신호관제시스템개발, HILS기반자율주행신호운영시스템시뮬레이터개발, 중 소도시실증사업설계 / 구축 / 운영 / 평가기술개발로 4가지연구내용으로나뉨
123 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 IoT 기반교통안전시설정보제공및운영관리기술개발목표는자율주행차를위한교통안전시설운영관리기술개발, IoT기반교통안전시설물인식기술개발, 도심교차로환경통합실증연구기획으로나뉨 과제연구목표 : 자율주행관련운행체계및 AI 안전운전능력검증체계개발 3 개년도로나뉘어자율주행차주행안전성능, 면허제도및법규제, 운행체계에대한연구 내용을다루며 < 표 5-2> 와같음 < 표 5-2> 연차별 1 과제연구내용 연차연구개요연구내용 1 차년 2 차년 3 차년 자율주행차가도로를주행하기위해서는기술적인발전이외에도일정수준이상의주행안전성능 ( 교통안전 ) 을만족하는운전능력검증과사고발생시배상책임문제등을명확히하는제도의정비필요 자율주행장치에의해운전되는자율주행차는사람인운전자에게부여하는운전면허를대신할별개의면허제도가부재 또한, 자율주행시스템의도입은운전업무에대한운전자의역할을현격히감소시켜차량사고의책임소재에대한모호함을야기할수있음 국내의경우자율주행차의시험운행과관련된규정은존재하지만실제도로운행을위한법제도는미비한상황 자율주행차의상용화를위해서는운전능력평가시스템을개발하고, 교통사고처리등에대한관련법의정비등전반적인운행체계구비가필요 자율주행차의공공도로주행관련발생현안에대한운행체계방향성설정 자율주행AI안전운전능력검증시스템연구개발 자율주행운전면허실증단지구축기획연구추진 전자 통신 기계적관점이아닌도로이용자관점의교통법규및안전수칙준수능력, 비정규적상황대응 ( 돌발상황에서의정지와서행, 현장수신호인지능력, 안전시설인식및행동등 ) 을다양한실환경에서검증할수있는평가기준과시스템화된검증체계개발 도로시설및이용자환경을다양하게변화시켜검증시스템을적용할수있는실도로환경시험단지구축 상설시험구간을이용한 AI 운전자격 ( 또는등급 ) 부여제도를개발하고이를면허시스템과연계하는관리체계구축 1차년도에는자율주행차의공공도로주행관련발생현안에대한운행체계방향성설정, 자율주행 AI 운전능력검증시스템연구개발및운전면허실증단지구축기획연구에대한연구를수행함 2차년도에는전자 통신 기계적관점이아닌도로이용자관점의교통법규및안전수칙준수능력, 비정규적상황대응 ( 돌발상황에서의정지와서행, 현장수신호인지능력, 안전시설인식및행동등 ) 을다양한실환경에서검증할수있는평가기준과시스템화된검증체계개발, 도로시설및이용자환경을다양하게변화시켜검증시스템을적용할수있는실도로환경시험단지구축에대한연구를수행함 3차년도에는상설시험구간을이용한 AI 운전자격 ( 또는등급 ) 부여제도를개발하고이를면허시스템과연계하는관리체계구축에대한연구를수행함
124 제 5 장연구과제추진전략 과제연구목표 : 자율주행을위한 AI 기반신호제어시스템개발 총 3 개년도로나뉘어스마트신호제어현장장치및관제센터운영기술개발, 신호운영 체계구축, 운행관제시스템융합에대한연구내용을다루며 < 표 5-3> 과같음 < 표 5-3> 연차별 2 과제연구내용 연차연구개요연구내용 1 차년 2 차년 3 차년 자율주행차와일반차량이혼재해운영되는도로환경에서 AI 기반의스마트신호제어를위한현장장치및관제센터운영기술개발 일반차량을대상으로하는지능형교통체계와자율주행시스템을통합한신호운영체계구축이필요 자율주행환경에서도신호교차로로인한불필요한교통정체를해소하기위해전통적인교통신호운영체계와자율주행차의위치와경로를제어하는운행관제시스템을융합 자율주행차의교차로신호운영규제지원방안연구 실시간신호운영을위한자율주행차정보수집기능기술개발 자율주행차위치및경로정보를이용한신호교차로정체예측및모니터링기술개발 AI 기반광역네트워크차원의최적신호운영기술개발 통신기반의개별차량감응제어 (Actuation Control) 기술개발 자율주행차의운행경로최적화를통한정체관리기술개발 중 소도시를대상으로자율주행차통합신호제어시스템설계및구축을통해효과평가를실시하는등실증사업시행 1차년도에는자율주행차의교차로신호운영규제지원방안연구및실시간신호운영을위한자율주행차정보수집기능기술개발에대한연구를수행함 2차년도에는자율주행차위치및경로정보를이용한신호교차로정체예측및모니터링기술개발, AI 기반광역네트워크차원의최적신호운영기술개발, 통신기반의개별차량감응제어 (Actuation Control) 기술개발, 자율주행차의운행경로최적화를통한정체관리기술개발에대한연구를수행함 3차년도에는중 소도시를대상으로자율주행차통합신호제어시스템설계및구축을통해효과평가를실시하는등실증사업시행에대한연구를수행함
125 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 과제연구목표 : IoT 기반교통안전시설정보제공및운영관리기술개발 총 3 개년도로나뉘어인프라기술개발, V2X 기반통신정보전달신규교통안전시설추가 구축, 자율주행차교통안전시설개발및운영 관리에대한연구내용을다루며 < 표 5-4> 와 같음 < 표 5-4> 연차별 3 과제연구내용 연차 연구개요 연구내용 자율주행차량에교통안전시설 ( 안전표지, 노면표시, 신호시스템 ) 의시각정보뿐만 효율적인교통안전시설규제정보공공개방전략수립 교통안전시설관리를위한표준코드체계개발 아니라차량센서가인지할수있는 IoT 1차년 표준코드체계기반교통안전시설물정보관리시스템및기반의정보를실시간으로제공하고관리기관용운영프로그램개발관리하기위한인프라기술개발 자율주행차량제조사대상클라우드형정보제공체계 구축 2 차년 3 차년 기존시각정보기반교통안전시설은인간운전자와자율주행차량카메라센서에전달하기위해계속운영 자율주행차량에 V2X 기반통신정보전달을위한신규교통안전시설추가구축 자율주행차량은기존교통안전시설이전달하는시각정보와 V2X 기반의통신정보를조합하여인간운전자와동일하게교통안전시설을인지, 교통안전시설의교통규제및지시를수용 교통안전시설에적합한 IoT 장치표준개발 현장기반 IoT 정보제공응용프로토콜개발 노변에설치된교통안전시설정보수집및수정입력, 지도표출, 출력, 관리센터와실시간연동하는관리소프트웨어개발 IoT 시제품 ( 준상용제품수준 ) 설계및제작 IoT 기술규격서작성및자율주행차량용 API 개발 IoT 정보제공내역관리센터전송및이력관리 도시교통정보센터교통안전시설물관리시스템구축 실증사이트에대한안전시설조사및데이터베이스구축 노변안전시설물용 IoT 시제품설치및운영, 평가 1차년도에는효율적인교통안전시설규제정보공공개방전략수립, 교통안전시설관리를위한표준코드체계개발, 표준코드체계기반교통안전시설물정보관리시스템및관리기관용운영프로그램개발, 자율주행차량제조사대상클라우드형정보제공체계구축에대한연구를수행함 2차년도에는교통안전시설에적합한 IoT 장치표준개발, 현장기반 IoT 정보제공응용프로토콜개발, 노변에설치된교통안전시설정보수집및수정입력, 지도표출, 출력, 관리센터와실시간연동하는관리소프트웨어개발, IoT 시제품 ( 준상용제품수준 ) 설계및제작, IoT 기술규격서작성및자율주행차량용 API 개발, IoT 정보제공내역관리센터전송및이력관리에관한연구를수행함 3차년도에는도시교통정보센터교통안전시설물관리시스템구축, 실증사이트에대한안전시설조사및데이터베이스구축, 노변안전시설물용 IoT 시제품설치및운영, 평가에대한연구를수행함
126 제 5 장연구과제추진전략 연구분야별연차별사업내용 < 표 5-5> 는 1 차년도연구개발분야별목표를나타냄 < 표 5-5> 제 1 차년도연구개발분야별목표 연구분야연차목표투자영역주요수행내용 자율주행관련운행체계개발 자율주행 AI 운전능력검증시스템개발 자율주행운전면허실증단지구축기획연구통신기반의자율주행차신호규제를위한현장시스템개발 AI 기반통합신호관제시스템개발 HILS 기반자율주행신호운영시스템시뮬레이터개발 자율주행차를위한교통안전시설운영관리기술개발 IoT 기반교통안전시설물인식기술개발 교통관리당국의자율주행차지시및통제를위한기반기술확보 자율주행공도운행에대한발반방안이슈도출 자율주행차용운전면허를위한평가요소발굴 자율주행시스템운전능력평가를위한기반기술연구 (1 단계 ) 자율주행시스템운전능력평가시나리오생성기술개발 (2 단계 ) 자율주행시스템운전능력평가단지구축타당성분석 (1 단계 ) 자율주행신호교차로시스템프레임워크도출 자율주행운행지원스마트신호제어기개발 (1 단계 ) 인공지능신호관제시스템기계학습을위한실증지역교통기초자료구축 (1 단계 ) 통합환경자율주행신호제어시스템시뮬레이션시뮬레이터개발 (1 단계 ) 효율적인교통안전시설정보공공개방전략수립 (1 단계 ) 교통안전시설관리를위한운영체계설계 통신기반의교통안전시설개발 (1 단계 ) 현장 - 센터간교통안전시설정보의실시간연동체계및관리소프트웨어제작 기술개발 기술개발 기술개발 기술개발 기술개발 기술개발 실증 기술개발 기술개발 자율주행센서정보수집및통합관리기술개발 자율주행시스템운전능력평가발전방안검토및현안도출 자율주행교통정보데이터발전방안체계검토및현안도출 자율주행공도운행발전방안개선요구사항도출 자율주행의 Human-Factor 분석 자율주행차제어권전환안전성평가요소검토 자율주행개발모델현황및방향검토 국내외자율주행평가요소현황조사 ODD 기반자율주행기능및요구사항분석 자율주행시스템윤리적딜레마사회적수용성연구 안전운전능력평가범위설정및평가모델구축 인공지능기반교통상황시뮬레이션기술개발 실증단지구축을위한경제적, 정책적, 재무적타당성분석 평가환경통제및운영관리방안마련 통신기반신호교차로운영시스템아키텍쳐구성및요소정의 통신기반디지털신호제어기의통신프로토콜정의 객체인식기술을이용한교차로교통상황모니터링기술개발 실증지역연속교차로에대한시간대별방향별교통기초자료수집 학습기반교차로교통상황시뮬레이션구현및분석개발 (1 단계 ) 신호기, 안전표시, 노면표시설치위치, 모양, 우선순위, 기타 ( 신규시설추가등 ) 기준규격검토 자율주행개발사 + 교통그룹의의견수렴 기존시스템현황및개선사항도출및타시스템검토 시설별 DB 구축및관리를위한표준코드체계개발 자율주행교통안전시설운영관리프레임워크설계 통신이요구되는교통안전시설의요구사항파악 동적 / 정적교통정보속성및도로환경에따른요구사항 ( 종단, 평면선형 ) 도출 교통안전시설에적합한 IoT 장치표준개발 현장기반 IoT 정보제공응용프로토콜개발 도심교차로환경통합실증 통합시험실증후보지선정및기초조사 기술개발 실증 실증지역후보지선정및현황조사
127 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 < 표 5-6> 은 2 차년도연구개발분야별목표를나타냄 < 표 5-6> 제 2 차년도연구개발분야별목표 연구분야연차목표투자영역주요수행내용 자율주행관련운행체계개발 자율주행 AI 운전능력검증시스템개발 자율주행운전면허실증단지구축기획연구통신기반의자율주행차신호규제위한현장시스템개발 AI 기반통합신호관제시스템개발 HILS 기반자율주행신호운영시뮬레이터개발 자율주행차를위한교통안전시설운영관리기술개발 IoT 기반교통안전시설물인식기술개발 교통관리당국의자율주행차지시및통제를위한요소기술확보 자율주행공도운행관련발전방안도출 자율주행차용운전면허발급및면허관리체계 (2단계) 자율주행시스템운전능력평가를위한기반기술연구 (2단계) 자율주행시스템운전능력평가시나리오생성기술개발 (2단계) 자율주행시스템운전능력평가단지구축타당성분석 자율주행시스템운전능력평가단지운영설계안마련 자율주행운행지원스마트신호제어기개발 (2 단계 ) 인공지능신호관제시스템기계학습을위한실증지역교통기초자료구축 (2단계) 인공지능학습을위한인프라구축완료 통합환경자율주행신호제어시스템시뮬레이션시뮬레이터개발 (2 단계 ) 효율적인교통안전시설정보공공개방전략수립 (2단계) 교통안전시설현황조사및 DB 구축 (1단계) 교통안전시설 DB 관리시스템및관리운영플랫폼개발 통신기반의교통안전시설개발 (2단계) 통신기반의교통안전시설시제품설계 기술개발 기술개발 기술개발 기술개발 기술개발 기술개발 실증 기술개발 기술개발 자율주행센서정보수집및통합관리기술개발 ( 계속 ) 자율주행원격제어관리모듈개발 자율주행시스템운전능력평가발전방안도출 자율주행교통정보데이터발전방안도출 자율주행차제어권전환안전성평가요소검토 ( 계속 ) 자율주행개발모델현황및방향검토 ( 계속 ) 국내외자율주행평가요소현황조사 ( 계속 ) ODD 기반자율주행기능및요구사항분석 ( 계속 ) 자율주행시스템윤리적딜레마사회적수용성 ( 계속 ) 기술개발현황따른안전운전능력평가범위및모델수정 인공지능기반교통상황시뮬레이션기술개발 ( 계속 ) 실증단지구축을위한경제적, 정책적, 재무적타당성분석 ( 계속 ) 평가환경통제및운영관리방안마련 디지털신호제어기의자율주행지원기능을위한현장검사시스템개발 디지털신호등지원기능에대한디지털신호제어기현장검사통신플랫폼개발 객체인식기술을이용한교차로교통상황모니터링기술검증 실증지역연속교차로에대한시간대별방향별교통기초자료수집 ( 계속 ) 인공지능학습을위한컴퓨팅인프라구축 학습기반교차로교통상황시뮬레이션구현및분석개발 (2 단계 ) 신호기, 안전표시, 노면표시설치위치, 모양, 우선순위, 기타 ( 신규시설등 ) 기준규격검토 ( 계속 ) 도로교통법시행규칙의내용수정및매뉴얼제 개정 교통안전시설관리및운영플랫폼개발 교통안전시설 DB 구축 자율주행교통안전시설운영관리프레임워크도출 교통안전시설에적합한 IoT 장치표준개발 ( 계속 ) 현장기반 IoT 정보제공응용프로토콜개발 ( 계속 ) 통신방식선정및적용 통신기반교통안전시설프로토타입설계 도심교차로환경통합실증 통합시험실증평가및시범운영환경조성 기술개발 실증 실증지역선정및교통안전시설플랫폼기초설계
128 제 5 장연구과제추진전략 < 표 5-6> 은 3 차년도연구개발분야별목표를나타냄 < 표 5-7> 제 3 차년도연구개발분야별목표 연구분야 연차목표 투자영역 주요수행내용 교통관리당국의자율주행차지시및통제기술확보 자율주행공도운행을위한관련발전방안 자율주행교통정보유효성평가및관리기술개발 자율주행관련정비 자율주행시스템운전능력평가입법추진지원 기술개발운행체계개발 자율주행차용운전면허시험및수용체계 자율주행원격제어관리모듈표준화추진 마련 자율주행차용운전면허평가항목및관리체계개발 자율주행차의공도주행의운행체계및 상용화기반조성 자율주행개발모델현황및방향검토 ( 계속 ) 자율주행시스템운전능력평가를위한 국내외자율주행평가요소현황조사 ( 계속 ) 기반기술연구 (3단계) ODD 기반자율주행기능, 요구사항분석 ( 계속 ) 자율주행시스템운전능력평가시나리오 자율주행시스템윤리적딜레마사회적수용성 생성기술개발 (3단계) 연구 ( 계속 ) 자율주행 AI 운전능력검증시스템개발 자율주행운전면허실증단지구축기획연구통신기반의자율주행차신호규제를위한현장시스템개발 AI 기반통합신호관제시스템개발 HILS 기반자율주행신호운영시스템시뮬레이터개발 자율주행차를위한교통안전시설운영관리기술개발 IoT 기반교통안전시설물인식기술개발 도심교차로환경통합실증 중소도시실증사업설계 / 구축 / 운영 / 평가 실도로기반자율주행운전능력평가방안도출방향 자율주행시스템운전능력검증시스템개발및평가방향제시 자율주행시스템운전능력평가단지설계및운영환경운영안도출 자율주행실증단지구축타당성분석 자율주행운행지원스마트신호제어기시제품개발 자율주행을위한교차로신호제어기개발 자율주행차교통정보를활용한신호운영시스템최적화기술개발완료 인공지능기반자율주행통합관제를통한교차로신호운영최적화달성 통합환경자율주행신호제어시스템시뮬레이션시뮬레이터개발 (3단계) 통합신호제어시스템시뮬레이션평가환경조성 교통안전시설현황조사및 DB 구축 (2단계) 교통안전시설 DB 관리시스템및관리운영플랫폼개발및시범운영 자율주행을위한교통안전시설정비 통신기반의교통안전시설시제품설계, 제작및평가 디지털교통안전정보시스템구축및개발 통합시험실증평가및시범운영 디지털교통안전정보시스템실증평가 / 운영 중 / 소도시테스트사이트선정 자율주행신호제어시스템실증평가 기술개발 기술개발 기술개발 기술개발 기술개발 실증 기술개발 기술개발 기술개발 실증 실증 인공지능교통상황시뮬레이션기술개발 ( 계속 ) 기술개발현황에따른안전운전능력평가범위수정및평가모델수정 ( 계속 ) 인공지능교통상황시뮬레이션기술개발 ( 계속 ) 통합성능평가프로세스표준안방향제시 평가데이터분석및통합관리시스템구축 아날로그및디지털통합신호시스템시제품개발 실시간운영을위한현장검사단말기개발 교차로시뮬레이션을이용한최적네트워크및파라미터도출 인공지능기반통합신호관제시스템설계 / 실증 실증결과에따른네트워크및파라미터튜닝 현장시스템 - 시뮬레이터 - 센터시스템을통합한자율주행통합신호제어시스템의시뮬레이션평가기술개발 교통안전시설관리및운영플랫폼개발 ( 계속 ) 교통안전시설 DB 구축 ( 계속 ) 자율주행차를위한교통안전시설정보클라우딩구축 시범지역선정및교통안전시설정보제공체계시범운영 통신기반의교통안전시설시제품제작및 LAB 테스트 교통안전시설플랫폼 + 비젼기반교통안전시설 + 통신기반교통안전시설설치 통신기반의교통안전시설물시제품설치, 운영평가 테스트사이트대상자율주행차통합신호제어시스템설계및구축효과평가실증
129 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 타사업연계방안검토 자율주행관련국가연구과제의경우국토교통부를중심으로차량, 도로인프라개발과제가 < 표 5-8> 과같이진행됨 ( 교통물류사업, 국토공간정보연구사업 ) < 표 5-8> 자율주행관련기존유사과제현황 과제명주관예산연구목표연구내용 스마트자율협력주행도로시스템개발 ( 자율주행을위한 LDM 및 V2X 기반도로시스템개발 ) 한국도로공사 억원 ( 정부 억원 ) 자율협력주행지원을위한하이브리드 V2X 통신 (WAVE+LTE) 기술개발 자동차의자율주행을지원하는첨단도로인프라개발을통해 2030년 안전하고쾌적한자율주행도로환경 실현 - 사양 : 자율협력주행 Level 2 수준 - 기술수준 : TRL6-8 ( 실용화기술型 ) - 수요기업 : 도로인프라 (WAVE 기지국 ) 개발업체, 통신모듈및 LDM 관련업체 연속류대상자율협력주행과 LDM 기술개발 자율주행차량이단독으로인프라와연계하여정보를공유하는 V2X 기반협력주행기술 자율주행자동차안전성평가기술및테스트베드개발 교통안전공단 202 억원 ( 정부 172 억원 ) 자율주행차관련안전기준국제선도및실도로평가환경구축을통한국내기업기술경쟁력제고 ADAS 센서기반으로현재제작사에서상용화진행중인레벨 2~3 자율차의안전성을평가하고, 자동차안전기준개정, 국제기준등에평가기술의반영을위한연구 자율주행차안전성검증을위한실도로평가환경구축 - 공인국제회의 (UN ECE) 기준제안및반영관련표준 / 기준 자율주행자동차차량. 운전자제어권전환안전성평가기술및사회적수용성연구 교통안전공단 82 억원 ( 정부 74 억원 ) 자율주행차 (SAE level 3) 의제어권전환안전성기준마련및자율주행차관련법령제 개정 자율주행차제어권전환안전성평가기술개발 자율주행상황에서의인적요인 (Human Factor) 심층연구및 DB 구성 / 활용 자율주행차의사회적수용성향상기반기술연구 V2X 기반화물차군집주행운영기술개발 한국도로공사 131 억원 ( 정부 98.5 억원 ) 화물차를대상으로자율주행기술을적용하여군집주행기술을구현하고, 자동차전용도로에서 V2X 기반으로차량과협력하여안전과운영효율성을향상시키는군집주행서비스운영기술개발 ( 차량제어 ) 군집주행에필요한시스템이탑재된화물차로안정적인연결성을유지하며군집주행을구현하기위한기본적인동작모드 ( 합류, 이탈, 긴급 / 이상상황 ) 별주행시나리오에의해통합적으로인지, 판단, 제어를실행하는차량기술개발 ( 인프라 ) 도로교통정보인프라 (V2X) 가지원되는자동차전용도로에서실시간위치기반으로도로교통정보를제공받으며, 다양한서비스시나리오를통해군집주행의안전성과효율성 ( 군집형성등 ) 을향상하는서비스인프라시스템개발및연구실증 자율주행지원을위한도로변화신속탐지 - 갱신기술개발및실증 한국도로공사 억원 ( 정부 110 억원 ) 실시간도로변화정보신속수집 갱신 공유를위한요소기술개발, 공용 / 비공용테스트베드운영을통해완성도를검증, 맵정보갱신실증을통해상용화가능성을확인 정밀도로공간정보구축센서-소프트웨어통합솔루션개발 도로및시설물변화정보신속수집및갱신기술개발 도로변화신속탐지, 갱신기술통합실증및공유기술개발
130 제 5 장연구과제추진전략 < 표계속 > 자율주행관련기존유사과제현황 과제명주관예산연구목표연구내용 자율주행기반대중교통시스템실증연구 자율주행기반카셰어링서비스시험운영연구 한국교통연구원 SK 텔레콤 359 억원 ( 정부 268 억원 ) 6.4 억원 ( 정부 3.2 억원 ) 교통혼잡과배기배출물 / 미세먼지로인한환경오염등의도심교통문제해결및기존에개발된자율주행기술을활용하여체험형서비스 R&D를구현하는실증연구추진으로개발완료후국민이직접체감할수있는육상용신교통서비스 (Transit as a Service, TaaS) 확보 자율주행시대대응을위한신교통서비스개발이필요함에따라자율주행승용차기반카셰어링서비스도입에필요한요소기술개발과시험운영을통한서비스환경및전략을파악 자율협력주행기반친환경대중교통플랫폼기술개발 - 지능형인프라연계자율주행지원관제시스템개발 - 사용자중심대중교통운영환경구축및실증평가 자율주행공유교통실증사업을위한체계적전략수립을통해추후실증사업을위한요소기술별시험평가항목및성과지표를산정 - 서비스운영프레임워크구축 - 서비스관제및연계인프라운영 / 전략수립 - 공유교통서비스사업의비즈니스모델발굴 한국도로공사의경우스마트자율협력주행도로시스템개발 ( 자율주행을위한 LDM 및 V2X 기반도로시스템개발 ) 연구, 자율주행지원을위한도로변화신속탐지-갱신기술개발과실증연구및 V2X 기반화물차군집주행운영기술개발을수행하고있음 교통안전공단의경우자율주행자동차안전성평가기술및테스트베드개발연구와자율주행차차량- 운전자제어권전환안전성평가기술및사회적수용성연구를수행하고있음 한국교통연구원의경우자율주행기반대중교통시스템실증연구를수행하고있으며, 친환경플랫폼기술을개발하여지능형인프라연계자율주행지원관제시스템개발을통한사용자중심대중교통운영환경구축및실증평가를수행함 SK텔레콤의경우자율주행기반카셰어링서비스시험운영연구를수행하고, 자율주행공유교통실증사업을위해서비스운영프레임워크구축, 서비스관제및연계인프라운영 / 전략수립및공유교통서비스사업의비즈니스모델발굴을통해요소기술별시험평가항목및성과지표를선정함 기존수행중인과제와의차별성및연계는기술개발의대상및범위에서구별됨
131 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 기존수행중인자율주행관련기존유사과제차별성및활용방안은 < 표 5-9> 와같음 < 표 5-9> 자율주행관련기존유사과제차별성및활용방안 과제명세부기술차별성활용방안 스마트자율협력주행도로시스템개발 ( 자율주행을위한 LDM 및 V2X 기반도로시스템개발 ) 자율주행자동차안전성평가기술및테스트베드개발 자율주행자동차차량. 운전자제어권전환안전성평가기술및사회적수용성연구 자율주행기반카셰어링서비스시험운영연구 도로시설차량평가기술, 복합측위및협력제어시작품개발 정밀전자지도기반의 LDM 개발및도로시설개선연구 자율협력주행도로시스템 Test Bed 구축및운영 자율주행자동차주행 고장, 내부통신보안안전성평가기술 테스트베드개발 ( 자율주행실험도시, K-City) 자율주행차차량 - 운전자간제어권전환안전성연구 자율주행카셰어링실증요소기술개발 자율주행차의센서성능한계극복을통한안전성향상을지원하기위한도로인프라요소기술 ( 정밀전자지도기반의동적정보시스템, 하이브리드 V2X 통신시스템, GPS반송파복합기반측위시스템등 ) 개발 본과제에서는차량과교통안전시설의 I2V 통신및신호운영관제기술개발로인프라-센터-차량간통합운영융합기술을목표로차별화됨 LDM을차량에적용하는과제로, 센터및차량 LDM 모듈, 인터페이스및 V2X 메시지등을최초개발하며, 연속류에서적용가능한 LDM layer3까지의기술개발 본과제에서는차량의부품및기능설계에대해서는범위에서제외하며, 차량과의통신및교통상황에대한검지기술개발이중심으로개발기술이차별화됨 자율차와인프라간의단방향정보제공조건하의실증테스트임 본과제에서는 AI 성능평가에중점을둔실환경도로구간구축운영으로차별화됨 ADAS 센서기반으로현재제작사에서상용화진행중인레벨2~3 자율차의안전성을평가 본과제에서는차량기술을포함하지않으며운영및교통안전시설인프라기술을개발, 개발대상이차별화됨 K-City는커넥티드가아닌자율차단독의안전성능을평가하기위한실차기반시험환경임 AI 성능평가는평가기준개발부터실도로주행의안전성을확인하는단계까지수행, 범용적안전성을평가하는테스트베드운영으로차별화됨 레벨3의자동차전용도로기반자율주행차의상용화를위해탑승자의안전한제어권전환을위한기준을마련하는연구 본연구는실증사업을통해제어권외전반적 AI 성능평가실시로차별화됨 자율주행카셰어링서비스도입을위한요소기술개발로, 서울대관악캠퍼스내에서자율주행차 5대로실증기반연구 ( 종료 ) 카셰어링서비스개발은본연구개발범위에해당하지않음 기존과제의측위기술과제어기술은본과제에서발전적으로참고할수있는요소기술임 기존과제의 LDM 기반플랫폼기술은본사업에서융합기술검토로참고할수있는요소기술임 테스트구간의운영및기본계획수립시참고할수있음 자율주행차의사고처리대응전략수립시참고할수있음 테스트구간의운영및기본계획수립시참고할수있음 선행연구과제로결과물을검토하여실도로실증시고려사항도출, 활용할수있음 자율주행테스트운영방안에대한본연구과제실증테스트계획수립시활용
132 제 5 장연구과제추진전략 < 표계속 > 자율주행관련기존유사과제차별성및활용방안 과제명세부기술차별성활용방안 자율주행기반대중교통시스템실증연구 V2X 기반화물차군집주행운영기술개발 자율주행지원을위한도로변화신속탐지. 갱신기술개발및실증 자율협력주행기반친환경대중교통플랫폼기술개발 지능형인프라연계자율주행지원관제시스템개발 V2X 기반군집주행통합운영기반기술 자동차전용도로기반군집주행실증 정밀도로공간정보구축센서 - 소프트웨어통합솔루션개발 도로및시설물변화정보신속수집및갱신기술개발 대중교통 ( 소형및중 대형버스 ) 을위한자율주행기술개발로지능형인프라와연계하는버스개조기술과센서기반인지최적화기술을개발 본과제는노선비지정협력주행및제어기술을개발하는연구로차별화됨 대중교통안전성과운행효율성을높이기위한 V2X인프라기반교통정보제공기술개발연구 본과제는노선비지정협력주행및교통안전시설과의센싱, 차량관제를통한네트워크효율개선기술을개발, 운영범위및기술활용성에서차별화됨 대형화물트럭의군집주행을위한자동차전용도로에서의인프라, 차량, 물류센터연계기술개발 본과제는중소도시실증을통해단속류를포함한신호운영제어기술을개발하는것으로차별화됨 중소도시실증시테스트계획수립시환경적고려사항참고가능 교통정보제공기술은본과제의통합관제기술개발에서참고가능 군집주행교통류이동패턴에대한연구결과를참고하여교차로제어기술개발시참고가능 물류사업자중심의물류센터기반군집주행시스템실증 - 자율주행을위한고정밀지도구축을위한저가형솔루션을개발 본과제와연구개발범위및대상이다름 LDM layer 1, 2에제공되는정보에대한관리기술로고속도로유지관리에활용하는과제임 본과제와연구개발범위및대상이다름 교통안전시설관리소프트웨어개발시현장및센터간소프트웨어연동기술개발에참고 - 스마트자율협력주행도로시스템개발 ( 자율주행을위한 LDM 및 V2X 기반도로시스템개발은아래와같은차별성 ( 활용방안 ) 용을가짐 - 인프라-센터-차량간통합운영융합기술을목표 ( 기존과제의측위기술과제어기술은본과제에서발전적으로참고할수있는요소기술 ) - 차량과의통신및교통상황에대한검지기술개발이중심으로개발기술 ( 기존과제의 LDM 기반플랫폼기술은본사업에서융합기술검토로참고할수있는요소기술 ) - AI 성능평가에중점을둔실환경도로구간구축운영 ( 테스트구간의운영및기본계획수립참고가능 ) 자율주행자동차안전성평가기술및테스트베드개발은아래와같은차별성 ( 활용방안 ) 을가짐 - 운영및교통안전시설인프라기술을개발, 개발대상 ( 자율주행차의사고처리대응전략수립시참고가능 )
133 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 - 범용적안전성을평가하는테스트베드운영 ( 테스트구간의운영및기본계획수립시참고가능 ) 자율주행차차량. 운전자제어권전환안전성평가기술및사회적수용성연구는아래와같은차별성 ( 활용방안 ) 을가짐 - 실증사업을통해제어권외전반적 AI 성능평가실시 ( 선행연구과제로결과물을검토하여실도로실증시고려사항도출, 활용가능 ) 자율주행기반카셰어링서비스시험운영연구는아래와같은차별성 ( 활용방안 ) 을가짐 - 자율주행카셰어링서비스도입을위한요소기술개발 ( 자율주행테스트운영방안에대한본연구과제실증테스트계획수립시활용 ) 자율주행기반대중교통시스템실증연구는아래와같은차별성 ( 활용방안 ) 을가짐 - 노선비지정협력주행및제어기술을개발하는연구 ( 중소도시실증시테스트계획수립시환경적고려사항참고가능 ) - 노선비지정협력주행및교통안전시설과의센싱, 차량관제를통한네트워크효율개선기술을개발, 운영범위및기술활용성 ( 교통정보제공기술은본과제의통합관제기술개발에서참고가능 ) V2X 기반화물차군집주행운영기술개발은아래와같은차별성 ( 활용방안 ) 을가짐 - 중소도시실증을통해단속류를포함한신호운영제어기술을개발 ( 군집주행교통류이동패턴에대한연구결과를참고하여교차로제어기술개발시참고가능 ) 자율주행지원을위한도로변화신속탐지. 갱신기술개발및실증은아래와같은차별성 ( 활용방안 ) 을가짐 - 자율주행을위한고정밀지도구축을위한저가형솔루션을개발 ( 교통안전시설관리소프트웨어개발시현장및센터간소프트웨어연동기술개발 )
134 제 5 장연구과제추진전략 5.2 연차별주요성과및성과지표 연차별주요성과도출 자율주행차의도로주행을위한운행체계및교통인프라개발을위해서는 3년정도의연구개발이필요할것으로판단됨 - 발전방안연구및핵심기술개발에대한기본설계및장비개발진행 (1차년도) - 성능시험및검증진행 (2차년도) - 중소도시환경평가및실용화기술개발 (3차년도) 가. 1과제연구목표 : 자율주행관련운행체계및 AI 운전능력검증체계개발 1과제연차별주요성과는총 3개의세부연구로나뉘며 < 표 5-10> 과같음 < 표 5-10> 연차별 1 과제주요성과 세부 연구목표 주요성과 수행기간 국내외검증체계관련동향조사 자율주행관련운행체계개발 자율주행 AI 운전능력검증시스템연구개발 자율주행운전면허실증단지구축방안 인공지능의운전능력검증을위한요구사항제시및방법의타당성도출 자율주행 AI 운전능력검증시나리오개발 자율주행 AI 운전능력검증프로세스및검증시스템의개발방향설정 운전능력검증을위한가상인지환경 Generator 모듈개발 다양한가상인지환경입력자료변환 Interface 모듈개발 차량 ECU 제어명령평가모듈개발 자율주행 AI 평가를위한통합체계시제품개발 자율주행 AI 운전능력검증통합체계평가 자율주행 AI 운전능력검증통합체계기반실증실험단지구축 Proving Ground(PG) 기반설계방안제시및검토 자율주행 AI 운전능력평가시험단지의추후운영계획수립 1~3 차년 (3 년 ) 1~3 차년 (3 년 ) 1~3 차년 (3 년 ) 1-1세부연구목표는자율주행관련운행체계개발로자율주행 AI 운전능력관련주요성과를가짐 1-2세부연구목표는자율주행 AI 운전능력검증시스템연구개발로자율주행 AI 평가, 검증관련하여주요성과를가짐 1-3세부연구목표는자율주행운전면허실증단지구축방안으로자율주행 AI 검증통합체계기반실증실험단지구축관련하여주요성과를가짐
135 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 나. 2 과제연구목표 : 자율주행을위한 AI 기반신호제어시스템개발 2 과제연차별주요성과는총 4 개의세부연구로나뉘며 < 표 5-11> 과같음 < 표 5-11> 연차별 2 과제주요성과 세부 연구목표 주요성과 수행기간 통신기반의 통신기반자율주행차량신호규제현장시스템개발 2-1 자율주행차 자율주행차운행지원교통신호지역제어기개발 1~3차년신호규제를위한 실시간운영을위한현장검사단말기개발 (3년) 현장시스템개발 자율주행환경신호교차로용량및안전성평가기술개발 2-2 AI 기반 AI 기반네트워크신호운영기술개발 1~3차년통합신호관제시스템 통합 AI 신호운영센터시스템개발 (3년) 개발 인공지능기반통합신호관제시스템설계및실증 2-3 HILS 기반자율주행 통합신호제어시스템시뮬레이션평가환경조성 1~3차년신호운영시스템 현장시스템-시뮬레이터-센터시스템을통합한자율주행통합 (3년) 시뮬레이터개발신호제어시스템의시뮬레이션평가기술개발 2-4 중소도시실증사업설계 / 구축 / 운영 / 평가 테스트사이트대상자율주행차통합신호제어시스템설계및구축효과평가실증 3 차년 (1 년 ) - 2-1세부연구목표는통신기반의자율주행차신호규제를위한현장시스템개발로자율 주행신호규제현장시스템개발관련하여주요성과를가짐 - 2-2세부 연구 목표는 AI 기반 통합신호관제시스템 개발로 AI기반 신호운영 센터시스템 개발관련하여주요성과를가짐 - 2-3세부연구목표는 HILS 기반자율주행신호운영시스템 시뮬레이터 개발로통신호제 어시스템시뮬레이션평가환경조성및평가기술개발관련하여주요성과를가짐 - 2-4세부연구목표는중소도시실증사업설계 / 구축 / 운영 / 평가로테스트사이트대상자율 주행차통합신호제어시스템설계및구축효과평가실증관련하여주요성과를가짐
136 제 5 장연구과제추진전략 다. 3 과제연구목표 : IoT 기반교통안전시설정보제공및운영관리기술개발 3 과제연차별주요성과는총 3 개의세부연구로나뉘며 < 표 5-12> 와같음 < 표 5-12> 연차별 3 과제주요성과 세부연구목표주요성과수행기간 자율주행차를위한교통안전시설운영관리기술개발 IoT 기반교통안전시설인식기술개발 IoT 도심교차로환경통합실증 신호기, 안전표시, 노면표시설치위치, 모양, 우선순위, 기타 ( 신규시설추가등 ) 기준규격검토 교통안전시설관리및운영플랫폼개발 교통안전시설 DB 구축 자율주행차를위한교통안전시설정보클라우딩체계구축 교통안전시설에적합한 IoT 장치표준개발 현장기반 IoT 정보제공응용프로토콜개발 통신방식선정및적용 통신기반의교통안전시설시제품제작및테스트 실증지역후보지선정및현황조사 실증지역선정및교통안전시설플랫폼기초설계 통신기반의교통안전시설물시제품설치및운영평가 1~3 차년 (3 년 ) 1~3 차년 (3 년 ) 1~3 차년 (3 년 ) 3-1세부연구목표는자율주행차를위한교통안전시설운영관리기술개발로교통안전시설관리및구축관련하여주요성과를가짐 3-2세부연구목표는 IoT 기반교통안전시설인식기술개발로교통안전시설 IoT 장치개발관련하여주요성과를가짐 3-3세부연구목표는 IoT 도심교차로환경통합실증으로실증지역조사, 설계및평가관련하여주요성과를가짐
137 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 과제별성과목표및성과지표 연구개발이원활히이루어지도록각과제별로성과목표및성과지표를선정하여제시함 가. 1 과제성과목표및성과지표 1 과제세부연구별성과목표및성과지표는 < 표 5-13> 과같음 < 표 5-13> 1 과제성과목표및성과지표 성과지표 세부 성과목표 질적성과 양적성과 성과지표측정방법단위목표가중치 (0-1) 설정근거 1 운행관련법령개정 ( 안 ) 도출 제 / 개정안의적정성, 실효성검증 건 법령개정관련문서작성 1-1 자율주행관련운행체계개발 발전방연연구 면허체계정비 교통경찰사고처리 2 자율주행운전면허체계관련법령개정 ( 안 ) 도출 제 / 개정안의적정성, 실효성검증 건 법령개정관련문서작성 3 교통경찰사고처리지침 ( 안 ) 개발 제 / 개정안의적정성, 실효성검증 건 지침개발문서작성 1-2 자율주행 AI 운전능력검증시스템연구개발 AI운전능력평가체계 면허제도마련 실도로환경시험단지구축 1 2 지식재산권 평가기술 ( 지침 / 기준 ) 특허출원건 관련문서작성 건 운전능력평가기준도출및평가시스템면허제도관련문서작성시험단지구축관련문서작성 1-3 자율주행운전면허실증단지구축방안 운전면허실증단지구축 타당성분석 수익성분석 1 평가기술 ( 지침 / 기준 ) 관련문서작성 건 실증단지구축관련문서작성
138 제 5 장연구과제추진전략 나. 2 과제성과목표및성과지표 2 과제세부연구별성과목표및성과지표는 < 표 5-14> 와같음 < 표 5-14> 2 과제성과목표및성과지표 성과지표 세부 성과목표 질적성과 양적성과 성과지표측정방법단위목표가중치 (0-1) 설정근거 2-1 통신기반의자율주행차신호규제를위한현장시스템개발 자율주행운행지원교통신호제어기개발 스마트디지털제어기간정보연계모듈개발 자율주행자동차의운행상태및경로모니터링기술개발 1 논문 학술지개재발표 ( 국내외 ) 편 지식재산권특허출원건 시작품 시작품제작 건 신호제어알고리즘논문으로게재운행상태모니터링기술모듈설계 자율주행지원교통신호제어기제작 2-2 AI 기반통합신호관제시스템개발 AI 기반네트워크신호운영기술개발 통합 AI 신호운영센터시스템개발 1 평가기술 ( 지침 / 기준 ) 관련문서작성 건 지식재산권특허출원건 평가기술 ( 지침 / 기준 ) 관련문서작성 건 신호운영기술관련문서작성 신호운영제어기술 통합신호관제시스템관련문서작성 2-3 HILS 기반자율주행신호운영시스템시뮬레이터개발 신호제어시스템시뮬레이션시뮬레이터개발 자율주행교통신호평가를위한시험환경설계및구축 1 시작품 2 평가기술 ( 지침 / 기준 ) 시작품제작관련문서작성 건 건 SW 개발 SW 등록건 시뮬레이터시작품제작모의실험평가관련문서작성 HILS 모듈및 S/W 개발 2-4 중소도시실증사업설계 / 구축 / 운영 / 평가 실증사업대상지통합신호제어시스템설계및구축 자율주행신호운영시스템실증사업을통한효과분석 1 2 평가기술 ( 지침 / 기준 ) 평가보고서 관련문서작성 관련문서작성 건 건 테스트구간관련문서작성 실증사업평가관련문서작성
139 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 다. 3 과제성과목표및성과지표 3 과제세부연구별성과목표및성과지표는 < 표 5-15> 와같음 < 표 5-15> 3 과제성과목표및성과지표 성과지표 세부 성과목표 질적성과 양적성과 성과지표측정방법단위목표가중치 (0-1) 설정근거 3-1 자율주행차를위한교통안전시설운영관리기술개발 교통안전시설관리기관운영관리정보플렛폼개발 자율주행차량대상클라우드형정보체계개발 자율주행환경교통안전시설시설정보관리체계및 SW 개발 1 HW 개발 HW 등록건 지식재산권특허출원건 SW 개발 SW 등록건 교통안전시설운영관리시스템개발 시설 DB 관리모듈및정보제공 교통안전시설 DB 관리 S/W 3-2 IoT 기반교통안전시설인식기술개발 IoT 교통안전시설요소기술개발 IoT 교통안전시설시제품개발 IoT 교통안전시설정보수집장치개발 1 HW 개발 HW 등록건 지식재산권특허출원건 시작품 시작품제작 건 IoT 교통안전시설및정보수집장치개발 IoT 교통안전시설작동모듈 IoT 교통안전시설시작품제작 3-3 IoT 도심교차로환경통합실증 IoT 도심교차로대상통합실증환경구축 IoT 도심교차로대상실증평가수행 1 2 평가기술 ( 지침 / 기준 ) 평가보고서 관련문서작성 관련문서작성 건 건 도심교차로 IoT 시설구축관련문서작성 도심교차로 IoT 시설평가관련문서작성
140 제 5 장연구과제추진전략 5.3 연구개발추진체계 과제별연구추진전략가. 1과제 : 자율주행관련운행체계및 AI 운전능력검증체계개발 산 학 연이공조하여핵심원천기술개발및 IPR을확보하고, 개발기술의표준화및운영전략을수립하며, 학계를통한창의적아이디어발굴을통한융합기술개발, 해외전문기관으로부터의기술자문을통한개발방향수립나. 2과제 : 자율주행을위한 AI 기반신호제어시스템개발 산 학 연이공조하여무선감응신호제어감지장치의무선통신보안기술개발과감지장치의성능모니터링및관리소프트웨어기술개발을위한핵심기술확보를추진하고기존신호제어감지장치관련기관들과긴밀히협력하여감지장치의통신보안성및관리의효율성면에서한층업그레이드된무선감응신호제어감지장치를개발할수있도록개발방향수립다. 3과제 : IoT 기반교통안전시설정보제공및운영관리기술개발 산 학 연이공조하여무선감응신호제어감지장치의검지정보생산성향상을위한핵심기술확보를추진하고, 지자체및운영기관을통한실증단지구축및운용환경평가를위한시뮬레이션기술개발라. 연구협의체구성 상기 3가지과제들은모두연구결과를마지막연구연차에현장에서실증시험을수행하도록계획되어있음 - 3개과제가공통의실증지역을마련하여실증시험수행할수있도록연구협의체구성 과제간관계 1과제는자율주행차의공공도로주행관련발생현안해결과상용화기반구축을위한연구로자율주행관련운행체계개발, 자율주행 AI 운전능력검증시스템연구개발, 자율주행운전면허실증단지구축기획으로구성됨 - 1과제에서자율주행관련운행체계및 AI 운전능력검증체계개발을통해자율주행운행체계를개발하고 2세부신호제제어시스템구축시반영할차량특성을도출함 - 1과제에서 AI 운전능력검증체계확인을위한모니터링관리기술은 2과제에서통신기반 AI 통합관제시스템무선성능모니터링및관리소프트웨어를개발하는연구와연계됨 - 1과제에서발전방안연구는 3과제도시부시험환경의국내법제도초안도출및설치관리매뉴얼개발에활용가능함
141 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 2과제는자율주행을위한 AI 기반신호제어시스템개발, 통신기반자율주행차신호규제를위한현장시스템개발, 중 소도시실증사업설계 / 구축 / 운영 / 평가로구성됨 - AI 기반통합신호관제시스템개발및관리소프트웨어개발로구성됨 - 2과제에서개발된통신신호제어장치의무선통신보안기술은 3과제에서활용하여국내무선통신제어교통운영시스템의법제도반영및국제화전략수립등추진가능함 - 2과제에서개발된네트워크교통관리기술및모니터링및관리소프트웨어기술은 3과제에활용하여모바일디바이스기반운영자교통안전시설모니터링및관리소프트웨어인터페이스핵심기술개발을위한기술정보로상호연계됨 3과제는자율주행차를위한교통안전시설운영관리기술개발, 식기술개발, 도심교차로환경통합실증연구로구성됨 IoT 기반교통안전시설물인 - 1과제에서개발된운전능력평가기술과 2과제의통합신호운영센터및소프트웨어등의규격에실증및 IoT 기술접목을통하여국내및국제기준으로제안하기위한자율주행교통인프라전략등마련과관계됨 연구추진체계가. 핵심기술개발네트워크 산 학 연이공조하여, 핵심기술개발및 IPR을확보하고, 개발기술의표준화및운영전략을수립 학계를통한창의적아이디어의발굴을통한융합기술개발과기술이전등을통한시제품생산및원가경쟁력확보추진나. 개발및사업화네트워크 핵심기술개발네트워크를통해개발할기술을적용하기위해지자체를사업전미리시범적용지역을지정하여사업의효율성증대를도모하고도로교통공단주관하에시험사업을위한발전방안연구, 시험평가및시제품제작, 개발기술의제품개발등과연계한시범시스템구축다. 연구과제구성체계 연구과제의관리기관은도로교통공단이되며산학연전문가가연구단을맡고총 3개의과제를각각의전문기관에서맡을수있도록연구관리체계를 < 그림 5-1> 과같이구성하였음
142 제 5 장연구과제추진전략 경찰청 관리기관 도로교통공단 ( 연구단관리 ) 1 과제연구단 2 과제연구단 3 과제연구단 산학연전문가산학연전문가산학연전문가 1 과제 2 과제 3 과제 자율주행관련운행체계및 AI 운전능력검증체계개발 자율주행을위한 AI 기반신호제어시스템 개발 IoT 기반교통안전시설 정보제공및운영관리 기술개발 자율주행관련운행체계개발 자율주행 AI 운전능력검증시스템연구개발 자율주행운전면허실증단지구축방안연구 통신기반의자율주행차신호규제를위한현장시스템개발 AI 기반통합신호관제시스템개발 HILS 기반자율주행신호운영시스템시뮬레이터개발 중소도시실증사업설계 / 구축 / 운영 / 평가 자율주행차를위한교통안전시설운영관리기술개발 IoT 기반교통안전시설인식기술개발 IoT 도심교차로환경통합실증 < 그림 5-1> 연구과제구성체계도 1 과제자율주행관련운행체계및 AI 안전운전능력검증체계개발은 3 개의세부과제로구성되고, 2 과제자율주행을위한 AI 기반신호제어시스템개발은 4 개의세부과제로구성되고, 3 과제 IoT 기반 교통안전시설정보제공및운영관리기술개발은 3 개의세부과제로구성됨
143 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 편집상여백
144 제 6 장자원투입계획 제 6 장자원투입계획 6.1 인력투입계획 연구일정에따른인력투입계획은과제별로투입되는연구인력을구분하여산출함 투입연구인력은 3 년간총 139 명임 < 표 6-1> 지원인력투입총괄 ( 단위 : 명 ) 과제구분 1차년 2차년 3차년 합계 ( 과제1) 자율주행관련운행체계및 AI 안전운전능력검증체계개발 ( 과제2) 자율주행을위한 AI 신호제어시스템개발 ( 과제3) IoT 기반교통안전시설정보제공및운영관리기술개발 합계 과제의연구투입인력은 3년간 30명, 2과제의연구투입인력은 3년간 48명, 3과제의연구투입인력은 3년간 61명임 < 표 6-2> 과제별연구투입인력 ( 단위 : 명 ) 구분 세부과제 1차년 2차년 3차년 계 자율주행관련운행체계개발 과제 자율주행 AI 안전운전능력검증시스템개발 자율주행운전면허실증단지구축기획연구 통신기반의자율주행차신호규제를위한현장시스템개발 과제 AI 기반통합신호관제시스템개발 HILS 기반자율주행신호운영시스템시뮬레이터개발 중 소도시실증사업설계 / 구축 / 운영 / 평가 자율주행차를위한교통안전시설운영관리기술개발 과제 IoT기반교통안전시설물인식기술개발 도심교차로환경통합실증 합계
145 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 6.2 소요예산산정 연구일정에따른소요예산은투입인력을고려한인건비, 연구활동에따른장비재료비투입계획을고려하여산정하였음 총소요예산은 1과제, 2과제, 3과제, 관리기관소요예산을고려하여 21,466 백만원으로산정함 < 표 6-3> 소요예산총괄 ( 단위 : 백만원 ) 과제명 1차년 2차년 3차년 합계 (1과제) 자율주행관련운행체계및 AI 안전운전능력검증체계개발 ,500 (2과제) 자율주행을위한 AI 신호제어시스템개발 1,300 2,850 2,850 7,000 (3과제) IoT 기반교통안전시설정보제공및운영관리기술개발 1,645 4,700 4,700 11,045 ( 관리기관 ) 기획평가관리비 합계 3,700 8,883 8,883 21,466 < 표 6-4> ( 과제 1) 자율주행관련운행체계및 AI 운전능력검증체계개발소요예산 ( 단위 : 백만원 ) 세부과제 1차년 2차년 3차년 계 자율주행관련운행체계개발 자율주행 AI 안전운전능력검증시스템개발 ,500 자율주행운전면허실증단지구축기획연구 합계 ,500 < 표 6-5> ( 과제 2) 자율주행을위한 AI 신호제어시스템개발소요예산 ( 단위 : 백만원 ) 세부과제 1차년 2차년 3차년 계 통신기반의자율주행차신호규제를위한현장시스템개발 500 1,325 1,150 2,975 AI 기반통합신호관제시스템개발 600 1,325 1,150 3,075 HILS 기반자율주행신호운영시스템시뮬레이터개발 중 소도시실증사업설계 / 구축 / 운영 / 평가 합계 1,300 2,850 2,850 7,000 < 표 6-6> ( 과제 3) IoT 기반교통안전시설정보제공및운영관리기술개발 ( 단위 : 백만원 ) 세부과제 1차년 2차년 3차년 계 자율주행차를위한교통안전시설운영관리기술개발 545 2,050 1,050 3,645 IoT기반교통안전시설물인식기술개발 900 2,500 2,800 6,200 도심교차로환경통합실증 ,200 합계 1,645 4,700 4,700 11,
146 제 6 장자원투입계획 6.3 정부지원타당성검토 본연구개발대상및범위는공로상의안전시설인프라및교통운영 교통체계를포함하며국가교통안전증진과자율주행교통환경을조성하기위한과제로정부의체계적인정책에따라추진되어야하는연구개발사업임 자율주행차의상용화및도로운행을대비한기술개발연구로정부지원추진이타당함 - 자율주행차도로운행안전성을확보하기위한검사기술과교통인프라를개발하고, 법 제도정비및적용을통한국민의안전을확보하기위한공공의활용성이매우높은과제임 - 빠르게발전하는자동차제작기술대응및교통운영효율성강화를고려한미래지향적연구개발사업으로관련산업의육성과자율주행차도로주행의안전성을제고함 - 제8차국가교통안전기본계획 (2017~2021), 제2차자동차정책기본계획 (2017~2021) 등에따른정부정책방향과부합하는안전한교통환경을조성하고국민의안전과직결되는기술개발을추진함 민간은규모가영세하고자율주행교통환경에대한컨셉부재, 장비개발투자의한계등을고려할때정부주도의체계적인연구개발추진과산학연및민간부문의협력적관계구성이적절함
147 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 편집상여백
148 제 7 장과제공모방안 제 7 장과제공모방안 과제제안요구서 과제명 1. 연구개발목표 자율주행관련운행체계및 AI 안전운전능력검증체계개발 자율주행상용화기반조성, 안전확보를위한운행체계및자율주행차의 안전운전능력검증기술개발 자율주행차가도로를주행하기위해서는기술적인발전이외에도일정수준이상의주행안전성능 ( 교통안전 ) 을만족하는운전능력검증과사고발생시배상책임문제등을명확히하는제도의정비필요 - 자율주행관련운행체계개발 - 자율주행 AI 안전운전능력검증시스템연구개발 - 자율주행운전면허실증단지구축방안연구 자율주행자동차관련법제도기준연구를수행함으로써관련국제기준선도및자율주행기술개발방향성제시 자율주행허용기준, 제어권이양등에대한현안해결로국민편의증진및법제도적상용화기반구축 2. 연구개발필요성 국내 외교통운영관리환경변화대응기술개발필요 자율주행장치에의해운전되는자율주행차는사람인운전자에게부여하는운전면허를대신할별개의면허제도가부재 또한, 자율주행시스템의도입은운전업무에대한운전자의역할을현격히감소시켜차량사고의책임소재에대한모호함을야기할수있어기존의자동차법규제에대한정비가중요 현재전세계적으로다양한자율주행방식에따라법제도를어떻게적용할것인지에대한논란이가중되고있으며, 5 년이상준비가진행된미국의경우에도미흡한부분이다수 국내의경우자율주행자동차의시험운행과관련된규정은존재하지만실제도로운행을위한법제도는미비한상황 자율주행자동차의상용화를위해서는운전능력평가시스템을개발하고, 교통사고처리등에대한관련법의정비등전반적인운행체계구비가필요
149 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 3. 연구개발내용 과제명 : 자율주행관련운행체계및 AI 안전운전능력검증체계개발 ( 세부과제 1) 자율주행관련운행체계개발 - 자율주행관련법제도 ( 도로교통법, 교통사고처리특례법 ) 방향설정 - 자율주행차단계적운전능력검증 ( 운전자격부여제도등 ) 및면허관리체계개발 - 자율주행차교통경찰현장지시및통제방안개발 - 자율주행차를위한통행규칙가이드라인개발및법제화방안연구 ( 세부과제 2) 자율주행 AI 안전운전능력검증시스템개발 - 자율주행차의도로이용관점에서교통법규및안전수칙준수능력, 비정규적상황 ( 돌발상황, 수신호인식, 안전시설인식등 ) 대응능력등을검증할수있는기준과평가체계개발 - 가상환경기반운전능력평가시뮬레이션구축방안연구 가상환경시뮬레이션구축가이드라인개발 가상환경시뮬레이션구성요소개발 ( 로직설계, 실험요소및실험해석등 ) 가상환경시뮬레이션적용및활용방안 - 가상환경기반운전능력평가시뮬레이션기술개발 가상센서시뮬레이션설계 (Lidar, Radar, Camera, 등 ) 가상통신및운행환경시뮬레이션설계 (V2X, 5G, 교통및도로환경, 악천후기상환경등 ) 가상운전능력평가시나리오개발 ( 교통및도로환경, 이벤트등 ) 가상운전능력평가 SW 개발 - 가상환경기반운전능력평가시스템프로토타입제작 SILS 기반운전능력평가프로토타입제작및기술시연 HILS 기반운전능력평가프로토타입제작및기술시연 ( 세부과제 3) 자율주행운전면허실증단지구축방안연구 - 도로시설및이용자환경을다양하게변화시켜검증시스템을적용할수있는자율주행차안전운전능력실증단지기본설계 실증단지입지조건및당위성, 단지계획, 설계규모제시 실증단지구축계획및로드맵개발 실증단지구축을위한물리적기반시설 ( 실외시험환경, 실내시험환경, 지원시설, 안전운전능력평가센터등 ) 설계방안 설계대안개발 ( 실외주행코스, 필요인력, 소요예산등수립 ) - 자율주행안전운전능력실증단지구축을위한경제성, 정책성, 수익성확보방안, 운영방안등종합적분석과실증단지타당성평가 세부연구개발내용은연구제안단계에서당초연구개발목표를벗어나지않는범위에서다르게구성할수있음
150 제 7 장과제공모방안 4. 연구개발추진방법 연차별연구개발내용 1 차년도 - 자율주행시스템운전능력평가검토현안도출 - 자율주행차안전성평가요소검토 - 안전운전능력평가범위설정및평가모델구축 - 교통상황가상환경기반시뮬레이션기술개발 - 실증단지구축을위한경제적, 정책적, 재무적타당성분석 - 평가환경통제및운영관리방안마련 2 차년도 - 자율주행원격제어관리모듈개발 - 자율주행차안전성평가요소검토 ( 계속 ) - 교통상황가상환경기반시뮬레이션기술개발 ( 계속 ) - 실증단지구축을위한경제적, 정책적, 재무적타당성분석 ( 계속 ) - 평가환경통제및운영관리방안마련 ( 계속 ) 3 차년도 - 자율주행원격제어관리모듈기술규격개발 - 자율주행차용운전면허평가항목및관리체계개발 - 교통상황가상환경기반시뮬레이션기술시연 - 통합성능평가프로세스표준안방향제시 - 자율주행운전면허평가데이터분석및통합관리시스템구축 연구개발추진전략 자율주행차량또는자율주행소프트웨어개발업체참여하도록연구내용제안 - 자율주행차량 ECU 부문연구가능한연구진구성또는연구내용제안 실용화제품양산 - 개발될 AI 안전운전능력검증시스템의경우타과제와연계성및과업기간을고려, 2 차년도연구단계에서시작품생산이가능하여야함
151 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 5. 최종성과물 경찰부문자율주행운행체계발전계획서 자율주행차용운전면허평가항목및관리체계 AI 안전운전능력검증시스템및실증단지구축계획서 인공지능교통상황시뮬레이션기술 6. 연구기간및지원예산 관련특허, 논문, 보고서, 평가지표, 매뉴얼, 지침서등 총연구기간 : ~ (3 년 ) - 1 차년도연구개발기간 : ~ (9 개월 ) 총정부출연금 : 2,500 백만원이내 - 1 차년도정부출연금 : 600 백만원이내 7. 기타 본과제의보안등급은 일반과제 임 연구개발계획서는과제제안요구서 (RFP) 에제시된연구내용을참고하여작성하되, 과제목적달성을위해반드시필요하다고판단되는경우에는일부세부내용을가감할수있으나, 그사유와근거를명확히제시하여야함 기수행하였거나현재수행중인유사과제와연구내용이중복되지않도록연구개발계획서를작성하여야함 - 공모과제와관련하여기수행되었거나현재수행중인과제의연구개발결과물과의구체적인연계 통합및활용방안을연구계획에포함 - 제안된연구내용이타유사과제와연구방법이나목표등에서차별화되는경우에는포함하여도무방하되, 그근거를명확히해야함 연구개발수행도중과제의중복성이사후에발견되거나연구개발목표가다른연구개발에의하여성취되어연구개발을계속할필요성이없어진때에는협약을해약할수있음 연구착수시점현황과개발종료후의대비가가능하도록세부과제별로 As-Is 와 To-Be 를구체화 가시화하여제시 연구개발계획서에세부과제간연구내용및성과의연계 / 활용을위한전략제시 - 과학기술적성과물을포함하여최종성과물을구체화하여제시
152 제 7 장과제공모방안 연구신청자는연구개발성과목표 ( 성과지표 / 달성목표치 / 가중치 ) 및사업수행 ( 일정 ) 계획과이에대한관리계획등을연구개발계획서에제시 - 개발된기술및성과물의목표수준달성도를확인할수있는구체적방안을제시해야함 과제선정후해당연구책임자 ( 기관 ) 에대한진도점검 관리및성과평가등의근거자료로활용 - 제시한성과지표는사전검토, 선정평가를통해조정 ( 추가 ) 가능 세부과제 ( 기술 ) 별로기술도입, 원천기술개발등기술확보전략을연구개발계획에제시해야함 - 연구개발기술수준을 TRL 로설정하고이에합당한근거를제시하여야함 참여기업은참여하고자하는과제와관련된연구또는사업수행실적이있고, 과제추진시역할 ( 자료 기술조사또는제공, 시험시공현장제공등 ) 이명확하여야하며시작품을직접개발할수있으며활용하고자하는기업우대 국제공동연구또는전문가활용방안 - 필요시관련기술해외선도기관과의공동연구추진방안및전문가활용계획을연구계획에포함 추후연구개발계획등은수정 보완될수있으며, 이에따라과제내특정기술개발에대한추진방식등이변경될수있음 - 본과제의연구기간은추후협약시변경될수있음 - 전문기관은필요시선정된주관기관 ( 연구책임자 ) 과협의를거쳐연구개발계획서의수정 보완 ( 연구목표, 내용및범위등을구체화, 명확화 ) 할수있음 - 연구추진과정에서관련기술환경변화에따라연구내용 ( 연구비포함 ) 이조정될수있음 기타세부적인연구내용, 주요성과물, 연구비 ( 안 ) 등은기획보고서참조
153 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 과제제안요구서 과제명 1. 연구개발목표 자율주행을위한 AI 기반신호제어시스템개발 자율주행차와일반차량이혼재해운영되는도로환경의운영효율성 강화, 자율주행지원을위한 AI 스마트신호제어기술구현 일반차량과다른자율주행자동차의주행특성상도로인프라환경과신호제어등관련시설의구축및관리시스템에대한도입및 AI 기반의스마트신호제어를위한현장장치및관제센터운영기술확보 - 통신기반의자율주행차신호규제를위한현장시스템개발 - AI 기반통합신호관제시스템개발 - HILS 기반자율주행신호운영시스템시뮬레이터개발 - 중소도시실증사업설계 / 구축 / 운영 / 평가 자율주행차의신호운영규제지원방안및통신기반신호운영기술, 광역네트워크차원의신호운영기술확보 자율주행과일반차량의혼합교통류환경에서실시간신호운영을통한교통관리및정체관리체계를구축하여교통혼잡으로인한사회적비용절감 2. 연구개발필요성 자율주행상용화지원및자율주행도로환경구축을위한신호제어기술개발필요 자율주행차상용화이후에도자율차와사람이운전하는일반차량이혼재된도로환경이상당기간유지될것으로예상 자율주행환경에서도신호교차로로인한불필요한교통정체를해소하기위해전통적인교통신호운영체계와자율주행차의위치와경로를제어하는운행관제시스템융합기술이필요 C-ITS 등일반차량을대상으로하는지능형교통체계와자율주행시스템을통합한신호운영체계구축, AI 기반의최적신호운영을위한통합신호관제시스템기술개발을통해자율주행교통환경구현 중 소도시를대상으로자율주행차통합신호제어시스템설계및구축을통한효과평가실시등실증사업시행, 실증결과를토대로교통관리고도화전략확보
154 제 7 장과제공모방안 3. 연구개발내용 과제명 : 자율주행을위한 AI 기반신호제어시스템개발 ( 세부과제 1) 통신기반의자율주행차신호규제를위한현장시스템개발 - 자율주행차교차로교통신호기반기술개발 통신기반자율주행차운행상태및경로모니터링기술개발 통신기반자율주행차감응제어기술개발 - 자율주행차운행지원 (RSE 연계등 ) 교통신호지역제어기개발 자율주행운행지원교통신호제어기기능적요구사항개발 자율주행운행지원교통신호제어기간정보연계모듈 ( 통신및보안체계 ) 개발 자율주행차운행정보가공모듈개발 자율주행차교통신호정보제공이력관리모듈개발 자율주행교통신호정보제공기술고도화 ( 보행자, 우회전등 ) 자율주행운행지원교통신호제어기규격및인증방안개발 - 자율주행환경신호교차로용량분석기술개발 자율주행차신호교차로용량분석기법개발 자율주행차신호교차로용량분석매뉴얼개발 ( 세부과제 2) AI 기반통합신호관제시스템개발 - AI 기반네트워크신호운영방안연구 AI 교통신호연구를위한자료축적용빅데이터플랫폼개발 AI 기술기반네트워크교통흐름운영관리신호제어방안연구 AI 기술기반네트워크교통신호운영효과모니터링방안연구 자율주행차운행경로최적화를통한정체관리기술개발 - 통합 AI 신호운영센터시스템개발 신호제어빅데이터실시간분산처리 / 연계관리 DB 기술개발 자율주행센터시스템구축방안연구 자율주행센터시스템과자율주행운행지원교통신호제어기연계방안연구 자율주행센터시스템과스마트교통신호시스템센터연계방안연구 통합 AI 신호운영센터시스템 HILS 활용평가방안연구 ( 현장시스템 - 시뮬레이터 - 센터시스템 ) ( 세부과제 3) HILS 기반자율주행신호운영시스템시뮬레이터개발 - 자율주행신호운영시스템 HILS 평가체계구축 자율주행교통신호평가를위한 HILS 시스템개발 자율주행교통신호평가를위한시험환경설계및구축 개발된 HILS 시스템을이용한 AI 기반신호제어알고리즘평가 ( 세부과제 4) 중소도시실증사업수행및효과분석 - (2-1 세부개발기술에대한적절한실증규모와방법을제시 ) - 실증사업현장선정및관련시설자료수집 - 자율주행운행지원교통신호제어기실증교차로구축 - 자율주행운행지원교통신호제어기실증효과분석 세부연구개발내용은연구제안단계에서당초연구개발목표를벗어나지않는범위에서다르게구성할수있음
155 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 4. 연구개발추진방법 연차별연구개발내용 1차년도 - 통신기반신호교차로운영시스템아키텍쳐구성및요소정의 - 교차로교통상황모니터링기술개발 - AI기반교차로교통상황시뮬레이션구현및분석개발 (1단계) 2차년도 - 자율주행운행지원교통신호제어기제작 - 자율주행운행지원교통신호제어기통신플랫폼개발 - 자율주행운행지원교차로교통상황모니터링기술검증 - AI기반교차로교통상황시뮬레이션구현및분석개발 (2단계) 3차년도 - 인공지능기반통합자율주행운행지원교통신호제어기실증 - 실증결과에따른파라미터튜닝 - AI기반신호제어시스템운영자파라미터안정화연구 - 통합한자율주행통합신호제어시스템의시뮬레이션평가 연구개발추진전략 자율주행시험차량이본연구에투입될수있고안전운전능력실증단지에서활용할수있도록연구내용제안 - 자율주행시험차량을연구진이확보 ( 보유또는임대등 ) 하여본연구에투입할수있도록연구내용제안 국내교통신호제어기기술표준을이해하는교통신호제어기제작또는소프트웨어개발업체참여하도록연구내용제안 - 국내교통신호제어기표준기술과연계되는 AI 교통신호제어알고리즘내용제안 - 일반차량및자율주행차량검지및통신연구가능한연구진구성 - HILS 를이용한독립교차로교통신호제어기및복수교차로연계알고리즘평가연구수행가능한연구진구성또는연구내용제안 실용화제품양산 - 개발될신호제어및통신시설의경우타과제와연계성및과업기간을고려, 2 차년도연구단계에서시작품생산이가능하여야함
156 제 7 장과제공모방안 5. 최종성과물 자율주행운행지원교통신호제어기통신플랫폼 자율주행운행지원교차로교통상황모니터링기술 통신기반자율주행차검지기술 자율주행교통신호평가용 HILS 시스템 6. 연구기간및지원예산 관련특허, 논문, 보고서, 평가지표, 매뉴얼, 지침서등 총연구기간 : ~ (3 년 ) - 1 차년도연구개발기간 : ~ (9 개월 ) 총정부출연금 : 7,000 백만원이내 - 1 차년도정부출연금 : 1,300 백만원이내 7. 기타 본과제의보안등급은 일반과제 임 연구개발계획서는과제제안요구서 (RFP) 에제시된연구내용을참고하여작성하되, 과제목적달성을위해반드시필요하다고판단되는경우에는일부세부내용을가감할수있으나, 그사유와근거를명확히제시하여야함 기수행하였거나현재수행중인유사과제와연구내용이중복되지않도록연구개발계획서를작성하여야함 - 공모과제와관련하여기수행되었거나현재수행중인과제의연구개발결과물과의구체적인연계 통합및활용방안을연구계획에포함 - 제안된연구내용이타유사과제와연구방법이나목표등에서차별화되는경우에는포함하여도무방하되, 그근거를명확히해야함 연구개발수행도중과제의중복성이사후에발견되거나연구개발목표가다른연구개발에의하여성취되어연구개발을계속할필요성이없어진때에는협약을해약할수있음 연구착수시점현황과개발종료후의대비가가능하도록세부과제별로 As-Is 와 To-Be 를구체화 가시화하여제시 연구개발계획서에세부과제간연구내용및성과의연계 / 활용을위한전략제시 - 과학기술적성과물을포함하여최종성과물을구체화하여제시
157 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 연구신청자는연구개발성과목표 ( 성과지표 / 달성목표치 / 가중치 ) 및사업수행 ( 일정 ) 계획과이에대한관리계획등을연구개발계획서에제시 - 개발된기술및성과물의목표수준달성도를확인할수있는구체적방안을제시해야함 과제선정후해당연구책임자 ( 기관 ) 에대한진도점검 관리및성과평가등의근거자료로활용 - 제시한성과지표는사전검토, 선정평가를통해조정 ( 추가 ) 가능 세부과제 ( 기술 ) 별로기술도입, 원천기술개발등기술확보전략을연구개발계획에제시해야함 - 연구개발기술수준을 TRL 로설정하고이에합당한근거를제시하여야함 참여기업은참여하고자하는과제와관련된연구또는사업수행실적이있고, 과제추진시역할 ( 자료 기술조사또는제공, 시험시공현장제공등 ) 이명확하여야하며시작품을직접개발할수있으며활용하고자하는기업우대 국제공동연구또는전문가활용방안 - 필요시관련기술해외선도기관과의공동연구추진방안및전문가활용계획을연구계획에포함 추후연구개발계획등은수정 보완될수있으며, 이에따라과제내특정기술개발에대한추진방식등이변경될수있음 - 본과제의연구기간은추후협약시변경될수있음 - 전문기관은필요시선정된주관기관 ( 연구책임자 ) 과협의를거쳐연구개발계획서의수정 보완 ( 연구목표, 내용및범위등을구체화 명확화 ) 할수있음 - 연구추진과정에서관련기술환경변화에따라연구내용 ( 연구비포함 ) 이조정될수있음 기타세부적인연구내용, 주요성과물, 연구비 ( 안 ) 등은기획보고서참조
158 제 7 장과제공모방안 과제제안요구서 과제명 1. 연구개발목표 IoT 기반교통안전시설정보제공및운영관리기술개발 기존교통안전시설이전달하는시각정보와 V2X 기반의통신정보를조합한자율주행차교통규제기술개발 자율주행차량에교통안전시설 ( 안전표지, 노면표시, 신호시스템 ) 의시각정보뿐만아니라차량센서가인지할수있는 IoT 기반의정보를실시간으로제공하고관리하기위한인프라기술개발 - 자율주행차를위한교통안전시설운영관리기술개발 - IoT 기반교통안전시설인식기술개발 - IoT 도심교차로환경통합실증 도로특성에따른자율주행교통안전시설구축으로자율주행차주행안전성확보 교통안전시설인프라의규제정보제공기술의상용화촉진으로시장경쟁력확보및국제기준 표준을선도 2. 연구개발필요성 자율주행차를위한교통안전시설운영관리기술, 자율주행차센서에교통안전시설물정보전달을위한 IoT 기반정보제공기술개발 자율주행차량은센서로부터수집된교통정보를통해주변의교통상황을인지, 판단및제어 인간운전자기준으로설치, 운영중인교통안전시설은자율주행차량센서에시각정보만을전달, 교통안전시설에대한시각정보가차단될경우자율주행차는인간운전자와교통상황을다르게인지하여도로안전위협가능성존재 교통안전시설정보를시각정보외 V2X 기반의통신으로자율주행차량에전달필요 효율적인교통안전시설규제정보공공개방전략, 교통안전시설관리를위한표준코드체계, 교통안전시설에적합한 IoT 장치표준개발을통해자율주행차정보제공체계구축
159 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 3. 연구개발내용 과제명 : IoT 기반교통안전시설정보제공및운영관리기술개발 ( 세부과제 1) 자율주행차를위한교통안전시설운영관리기술개발 - 효율적인교통안전시설규제정보공공개방전략수립 - 교통안전시설관리를위한 DB 구조설계및안전시설분류코드체계개발 - 분류코드체계기반교통안전시설물정보관리시스템및관리기관용운영프로그램개발 - 자율주행차량제조사대상클라우드형정보제공체계구축 ( 세부과제 2) IoT 기반 V2X 기술개발및시제품개발 - 교통안전시설에적합한 IoT 장치표준개발 - 현장기반 IoT 정보제공응용프로토콜개발 - 노변에설치된 IoT 교통안전시설물정보수집, 지도표출, 출력, 관리센터와실시간연동하는관리소프트웨어개발 - 노변에설치된 IoT 교통안전시설물정보수정, IoT 정보제공이력관리소프트웨어및장치개발 - IoT 안전시설시제품설계및제작 - IoT 안전시설정보를확인할수있는차량단말기시작품제작 - IoT 기술규격서작성 ( 통신, 보안, 전원, DB 구조등 ) 및자율주행차량용 API 개발 ( 세부과제 3) IoT 도심교차로환경통합실증 - 실증사이트에대한안전시설조사및데이터베이스구축 - 교통안전시설용 IoT 시제품설치 / 운영 / 기능평가 - 도시교통정보센터용교통안전시설물관리시스템설치 / 운영 / 기능평가 세부연구개발내용은연구제안단계에서당초연구개발목표를벗어나지않는범위에서다르게구성할수있음
160 제 7 장과제공모방안 4. 연구개발추진방법 연차별연구개발내용 1 차년도 - 신호기, 안전표시, 노면표시설치위치, 모양, 우선순위, 기타 ( 신규시설추가등 ) 기준규격검토 - 시설별 DB 구축및관리를위한분류코드체계개발 - 자율주행교통안전시설운영관리플랫폼설계 - 도로환경에따른요구사항 ( 종단, 평면선형 ) 도출 - 교통안전시설에적합한 IoT 장비요소기술개발 - 현장기반 IoT 정보제공응용프로토콜개발 - 실증지역후보지선정및현황조사 2 차년도 - 교통안전시설관리및운영플랫폼개발 - 자율주행교통안전시설운영관리프로그램개발 - 교통안전시설에적합한 IoT 장치개발 - 현장기반 IoT 정보제공응용프로토콜개발 ( 계속 ) - 통신기반교통안전시설프로토타입개발및 LAB 테스트 - 실증지역후보지상세조사및데이터베이스구축 3 차년도 - 통신기반의교통안전시설시제품제작 - 교통안전시설운영관리시스템구축 - 시범지역교통안전시설정보제공체계실증 연구개발추진전략 자율주행시험차량이본연구에투입될수있고안전운전능력실증단지에서활용할수있도록연구내용제안 - 자율주행시험차량을연구진이확보 ( 보유또는임대등 ) 하여본연구에투입할수있도록연구내용제안 교통안전시설제작또는소프트웨어개발업체참여하도록연구내용제안 - IoT 통신및교통안전시설분야연구가능한연구진구성또는연구내용제안 - 열악한현장상황 ( 예 : 악천후 ) IoT 교통안전시설기능담보위한기술제안
161 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 실용화제품양산 - 개발될 IoT 기반교통안전시설정보제공기술은 3 차년도시범지역적용을통해평가를실시 5. 최종성과물 교통안전시설관리및운영플랫폼자율주행차를위한교통안전시설정보클라우딩플랫폼 IoT 기반의교통안전시설시제품중소도시통합신호제어시스템설계및구축실증평가서 6. 연구기간및지원예산 관련특허, 논문, 보고서, 평가지표, 매뉴얼, 지침서등 총연구기간 : ~ (3 년 ) - 1 차년도연구개발기간 : ~ (9 개월 ) 총정부출연금 : 11,045 백만원이내 - 1 차년도정부출연금 : 1,645 백만원이내 7. 기타 본과제의보안등급은 일반과제 임 연구개발계획서는과제제안요구서 (RFP) 에제시된연구내용을참고하여작성하되, 과제목적달성을위해반드시필요하다고판단되는경우에는일부세부내용을가감할수있으나, 그사유와근거를명확히제시하여야함 기수행하였거나현재수행중인유사과제와연구내용이중복되지않도록연구개발계획서를작성하여야함 - 공모과제와관련하여기수행되었거나현재수행중인과제의연구개발결과물과의구체적인연계 통합및활용방안을연구계획에포함 - 제안된연구내용이타유사과제와연구방법이나목표등에서차별화되는경우에는포함하여도무방하되, 그근거를명확히해야함 연구개발수행도중과제의중복성이사후에발견되거나연구개발목표가다른연구개발에의하여성취되어연구개발을계속할필요성이없어진때에는협약을해약할수있음 연구착수시점현황과개발종료후의대비가가능하도록세부과제별로 As-Is 와 To-Be 를구체화 가시화하여제시 연구개발계획서에세부과제간연구내용및성과의연계 / 활용을위한전략제시 - 과학기술적성과물을포함하여최종성과물을구체화하여제시
162 제 7 장과제공모방안 연구신청자는연구개발성과목표 ( 성과지표 / 달성목표치 / 가중치 ) 및사업수행 ( 일정 ) 계획과이에대한관리계획등을연구개발계획서에제시 - 개발된기술및성과물의목표수준달성도를확인할수있는구체적방안을제시해야함 과제선정후해당연구책임자 ( 기관 ) 에대한진도점검 관리및성과평가등의근거자료로활용 - 제시한성과지표는사전검토, 선정평가를통해조정 ( 추가 ) 가능 세부과제 ( 기술 ) 별로기술도입, 원천기술개발등기술확보전략을연구개발계획에제시해야함 - 연구개발기술수준을 TRL 로설정하고이에합당한근거를제시하여야함 참여기업은참여하고자하는과제와관련된연구또는사업수행실적이있고, 과제추진시역할 ( 자료 기술조사또는제공, 시험시공현장제공등 ) 이명확하여야하며시작품을직접개발할수있으며활용하고자하는기업우대 국제공동연구또는전문가활용방안 - 필요시관련기술해외선도기관과의공동연구추진방안및전문가활용계획을연구계획에포함 추후연구개발계획등은수정 보완될수있으며, 이에따라과제내특정기술개발에대한추진방식등이변경될수있음 - 본과제의연구기간은추후협약시변경될수있음 - 전문기관은필요시선정된주관기관 ( 연구책임자 ) 과협의를거쳐연구개발계획서의수정 보완 ( 연구목표, 내용및범위등을구체화 명확화 ) 할수있음 - 연구추진과정에서관련기술환경변화에따라연구내용 ( 연구비포함 ) 이조정될수있음 기타세부적인연구내용, 주요성과물, 연구비 ( 안 ) 등은기획보고서참조
163 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 7.4 평가기준설정 연구개발목표 안전한자율주행차공공도로운행및교통환경기반조성을위한발전방안연구, 교통인프라기술확보를목적으로최종목표에부합되도록각과제의구성과연차별목표및최종목표를설정하여제시 연차별목표및최종목표의달성에대한정량적인평가를위하여명확한성과지표설정과평가기준제시 연구개발내용 현장중심적용성을전제로한기술개발과실현을위한체계적이고실천적인과제구성이필요함 기획과제에서제시한연구목표및기술개발요청사항에대하여제안과제의적정성, 상향된목표제시여부평가 산학연관의긴밀한협력체계하에서연구과제의추진이필요하므로체계적인과제구성및추진체계구성여부평가 최종목표달성을위한각과제간연계여부및과제간개발사항의중복여부및차별성, 적정성평가 추진전략및계획 연구개발성과목표 지표체계, 실용성검증및실용화추진계획등을연구개발계획서에필히제시하며이를통해향후과제선정후해당연구책임자 ( 기관 ) 에대한진도점검 관리및성과평가등의근거자료로활용 Testbed 의구축이본연구과제의성공의선결요건이될수있으므로, Testbed 의조속한선정및구축방안이구체적으로수립되었는지에대한평가필요 참여기업은참여하고자하는과제와관련된연구또는사업수행실적이있고, 과제추진시역할 ( 자료 기술조사또는제공, 시험시공, 현장제공, 시제품제작등 ) 이명확하여야함 지원한기관및연구진은기초 / 원천기술, 응용기술, 실용화기술등과제성격에따른성과물을얻을수있는능력을갖춘수준이요구됨 과제의단계별추진사항이연구목표달성을위해타당한가를평가하고연구개발사항과이를위한구체적추진방안수립여부 세부과제및단위과제간의 Data 연계, 개발기술공유, 현장의공유등에대한체계적인구성을갖추고시너지효과를달성하고자하는구체적방안이있는지에대한평가 과제의목표달성을위한연구기간의단계설정과연구개발비의적정하게편성여부 개발기술의실용성및경제성 기관선정의우선순위는검지기및통신분야에서이론적수준, 현장실용화의수준, 세계수준의기술경쟁력보유수준등을복합적으로고려하여결정함
164 제 7 장과제공모방안 현재기술수준과비교하여목표한개발기술의향상정도, 기술선도국대비예상수준, 기술의경쟁력수준등에대하여정성적또는정량적평가여부 연구기관또는참여기관을통한개발기술의실용화및사업화방안이성과지표의구체적항목으로제시여부 개발되는과제결과는실험실내의제한된범위와조건과는달리현장의여건과환경을고려한실질적이고실현가능한기술여부 연구책임자의전문성및관리능력 연구책임자는과제내의세부과제및세세부과제간에유기적인결합이원활하게추진되도록할필요가있으며, 융합기술및기존기술의고도화인점을고려하여교통및개발분야의이해도가높은전문가를필요로함 연구책임자는각과제의연구기관과의협조체제구축은물론과제내에서진행되는과제관리, 대외기술협력등해당사업의원활한추진을위한역할을수행해야하여이에대한역량을갖추어야함 연구책임자는국토교통부에서실시하는해당분야의산업육성, 발전정책및종합계획수립등관련업무추진시, 기술자문및적극적인업무협조역할을수행해야함 < 표 7-1> 평가항목별배점기준 ( 안 ) 기준항목 연구개발목표 (10 점 ) 연구개발내용 (25 점 ) 추진체계및전략 (25 점 ) 연구성과물활용계획의구체성및달성가능성 (25 점 ) 연구진구성의전문성및연구책임자의관리능력 (15 점 ) 세부항목 최종목표및연차별목표의명확성, 타당성 (5 점 ) 성과지표와평가기준의명확성, 적정성 (5 점 ) 연구개발최종목표와의부합성 (5 점 ) 과제구성의체계성, 실현가능성 (5 점 ) 세부과제간의상호연계성, 연계방안의구체성 (10 점 ) 연구개발내용의차별성및독창성 (5 점 ) 연구추진체계및전략의구체성, 타당성 (5 점 ) 연구단계별추진방안의구체성 (5 점 ) 연구기간및연구비편성의적절성 (5 점 ) 시뮬레이션 시작품제작및 Testbed 구축방안의구체성, 타당성 (10 점 ) 성과물활용및실용화방안의구체성, 적절성 (10 점 ) 성과물의실용화가능성 (10 점 ) 실용화촉진방안의구체성 (5 점 ) 연구책임자의전문성및해당분야실적 (10점) 연구진전문성및구성의적정성 (5점) 평가위원과반수이상이연구개발계획서가과제제안요구서 (RFP) 와부합되지부합성않는다고판정시탈락조치기타 평가위원과반수이상이기수행되었거나수행중인과제와중복되는것으로중복성판정시탈락조치주 : 총점은 100점이며, 60점미만인경우에는탈락조치
165 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 편집상여백
166 부록. 연구개발관련특허조사 부록연구개발관련특허조사 순서 1 발명의명칭교통신호에따른자율주행차량제어를위한방법및시스템 출원인한국과학기술정보연구원특허번호 출원일 2016 년 05 월 13 일법적상태공개 (), 등록 (o), 거절 ( ) 청구항 본발명은교통신호에따른자율주행차량제어를위한방법및시스템에관한것으로서, 교통신호에따라자율주행차량의주행을제어하는방법에있어서, (a) 교통신호인공전위함수를계산하는단계, (b) 상기교통신호인공전위함수와기정의된자율주행차량제어를위한인공전위함수를연산하여최종인공전위함수를계산하는단계를포함한다. 대표도면 분석결과 종합 발명의목적은신호등신호에따른인공전위함수를정의하고, 정의된인공전위함수를사용해자율주행차량의속도및방향을제어하는교통신호에따른자율주행차량제어를위한방법및시스템을제공함에있음
167 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 2 발명의명칭비신호교차로자율주행정보제공장치및그방법 출원인한국전자통신연구원특허번호 출원일 법적상태공개 ( ), 등록 (o), 거절 ( ) 청구항 본발명은일반차량과자율주행차량이같이운행되는상황에서비신호교차로에서자율주행을위한정보를제공하기위한비신호교차로자율주행정보제공장치및그방법에관한것으로서, 상기장치는, 비신호교차로각방향의차로및차선상의객체에대한상태를감지하는주행상황인식부 ; 비신호교차로주행차량으로부터차량주행상태정보를수신하고, 비신호교차로주변객체상태메시지를비신호교차로주변으로브로드캐스팅하는통신모듈 ; 상기감지된교차로각차로또는차선의객체상태감지정보와, 상기수신된교차로주변의차량정보를기설정된분석알고리즘을실행하여융합및분석하여교차로내객체를각각분류하여객체상세정보를생성하는상황분석부 ; 및상기생성된교차로주변의객체상세정보를상기통신모듈에대한통신포맷의객체상태메시지로변환하고, 변환된객체상태메시지를상기통신모듈로제공하는메시지생성부를포함한다. 대표도면 분석결과종합 발명의목적은 V2X 통신을이용하여센서기반자율주행자동차의비신호교차로주행성능을향상시킬수있도록한비신호교차로자율주행정보제공장치및그방법을제공함에있음
168 부록. 연구개발관련특허조사 순서 3 발명의명칭커넥티드카와자율주행차량용신호등 출원인세종신호 ( 주 ) 특허번호 출원일 법적상태공개 ( ), 등록 (O), 거절 ( ) 청구항 본발명은커넥티드카와자율주행차량용신호등에관한것으로, 보다상세하게는내비게이션을장착한일반차량은물론자율주행차량모두에신호등의적색과녹색잔여시간을전송해주어차량주행시황색으로바뀔때교차로를신속히빠져나가려는차량과신호전환에따른급출발차량상호간의차량사고를미연에방지할수있도록한커넥티드카와자율주행차량용신호등에관한것이다. 대표도면 분석결과종합 발명의목적은내비게이션을장착한일반차량은물론자율주행차량모두에신호등의적색과녹색잔여시간을전송해주어차량주행시황색으로바뀔때교차로를신속히빠져나가려는차량과신호전화에따른급출발차량상호간의차량사고를미연에방지할수있도록한커넥티드카와자율주행차량용신호등을제공함에있음
169 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 4 발명의명칭 교통표지판인식정보를활용한자율주행장치및방법 출원인주식회사만도특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 본발명은실시간으로인식한교통표지판및도로정보를바탕으로차량을안전하고효율적으로운전하기위한자율주행장치및방법에관한것이다 청구항 본발명에서는다양한센서와카메라를이용하여자차량전방의차선, 타차량, 보행자, 교통표지판, 및 / 또는신호등을포함하는자차량전방의운전을위한정보를감지하는전방감지부, 차량의위치에따른도로분기및 / 또는도로속성정보를제공하는내비게이션, 레이더등을이용하여후측방사각지대에타차량및 / 또는보행자를포함하는후측방의운전을위한정보를감지하는후측방감지부, 감지된경고표지판에따라자율주행차량이수행하여야하는동작을저장하는동작저장부및상기전방감지부, 상기내비게이션, 상기후측방감지부로부터오는정보들을취합하고, 인식된교통표지판에따라수행하여야할동작을상기동작저장부로부터읽어들여상기자율주행차량이수행하도록제어하는제어부를포함하는자율주행장치가개시된다. 본발명에의하면, 실시간교통표지판인식및주행도로정보를수집하여인식된교통표지판에따라설정된동작을수행하게함으로써보다안전하며효율적인자율주행을가능하게하는효과가있다. 대표도면 분석결과종합 본발명의목적은운전자가운전을할때상당부분참고로하는교통표지판이내포한정보를활용하여보다안전하며효율적인자율주행방법을제공함
170 부록. 연구개발관련특허조사 순서 5 발명의명칭 전방도로형상과연결을분석해차선변경과타이밍을결정하는자율주행제어장치및방법 출원인현대자동차주식회사특허번호 출원일 법적상태공개 ( ), 등록 (o), 거절 ( ) 청구항 본발명은자율주행을통하여목적지까지보다편리하고안정적이며효율적으로도착하도록지원하기위하여, 정밀지도로부터인지된전방의도로형상, 도로간의연결관계, 제한속도, 차선수, 이벤트 ( 예, 교차로, 횡단보도, 합류점, 분기점, 과속방지턱, Dead-end 등 ) 등을고려하여차선변경이필요한지를자동으로결정하고차선변경이필요한경우차선변경의타이밍을효과적으로결정할수있는, 자율주행제어장치및방법에관한것이다. 대표도면 분석결과종합 본발명은자율주행제어장치및방법에관한것으로서, 특히, 자율주행을위해서정밀지도로부터인지된전방의도로형상, 도로간의연결관계등을고려하여차선변경여부및타이밍을결정하는자율주행제어장치및방법에관한것
171 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 6 발명의명칭 실시간차량속도에따른유동적차로활용시스템및방법 출원인메타빌드주식회사특허번호 출원일 법적상태공개 ( ), 등록 (o ), 거절 ( ) 청구항 본발명은실시간차량속도에따른유동적차로활용시스템및방법에관한것으로서, 보다상세하게는자율주행차량들이주행하는도로에서실시간차량속도에따라차로의개수를변화시켜도로레이더검지기에서검지된신호에따른차량의궤적정보를이용하여차량이주행하는도로의효율적인운영이가능하게하는실시간차량속도에따른유동적차로활용시스템및방법에관한것이다 대표도면 분석결과종합 본발명의목적은, 실시간차량의속도를고려하여차선을변경하여, 교통의지, 정체를해소할수있는실시간차량속도에따른유동적차로활용시스템및방법을제공하는데있다
172 부록. 연구개발관련특허조사 순서 7 발명의명칭차량및도로시설물정밀위치정보제공시스템 출원인 ( 주 ) 세인한국건설기술연구원 특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 주요도로시설물에서의정확한위치정보를제공함으로써차량의측위보정을정밀하게수행할수있도록하여안정적인자율주행을지원하는차량및도로시설물정밀위치정보제공시스템이제공된다. 본발명에서는도로시설물이설치된지점부근에좌표정보를포함하는도로시설물에대한정보를무선으로송출하는무선송출기를설치하고, 도로시설물이설치된지점에대응되는도로에 RFID 태그를매설한다. 차량은무선송출기로부터전송되는신호로부터도로시설물의좌표정보를획득하고, RFID 태그로부터의신호로부터해당좌표의정확한위치를파악하여, 차량의측위보정을수행한다. 이를위하여차량은무선송출기로부터의도로시설물정보를수신하기위한무선수신기와, 도로에매설된 RFID 태그를활성화시킬수있는신호를송출하고 RFID 태그로부터발신되는정보를수신하기위한 RFID 리더를더구비한다. 본발명에따르면, RFID 태그로부터의신호로부터해당좌표의정확한위치를파악할수있으므로, 도로시설물의위치를정밀도높게파악할수있다. 대표도면 분석결과종합 본발명은주요도로시설물의보다정확한위치정보를제공함으로써차량의측위보정을정밀하게수행할수있도록하여안정적인주행을지원하는것을목적으로한다. 또한도로에매설되는장치의구성을최대한간단하게함으로써시스템설치및유지보수비용을절감하는것을목적으로한다
173 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 8 발명의명칭 차량자율주행서비스시스템및이를위한클라우드서버및그동작방법 출원인한국전자통신연구원특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 본발명은차량자율주행서비스시스템및이를위한클라우드서버및그동작방법에관한것으로서, 본발명의실시예에따른차량자율주행서비스시스템은자율주행차량이기설정된출발지부터목적지까지자율주행하기위해이용하는자율주행맵데이터를요청하는사용자단말, 및서로다른위치에서주행중인복수의수집용차량으로부터수신되는로우데이터를기반으로정밀맵데이터를구축및관리하며, 상기사용자단말의상기자율주행맵데이터요청에따라상기정밀맵데이터를검색하여자율주행맵데이터를획득하고, 획득된상기자율주행맵데이터를상기자율주행차량에전송하는클라우드서버를포함한다. 대표도면 분석결과종합 본발명의목적은차량자율주행서비스시스템및이를위해자율주행을위한정밀맵데이터수집하고자율주행을하고자하는차량에게자율주행을위한맵데이터를제공하는클라우드서버의동작방법을제공함을목적으로한다
174 부록. 연구개발관련특허조사 순서 9 발명의명칭 클라우드기반의자율주행차량을위한차등보상형협력적맵데이터제공시스템 출원인한국클라우드컴퓨팅연구조합특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 본발명은현재주행중인차량의도로및도로인접부위의동적데이터혹은정적데이터를수집하는상기데이터수집부, 상기데이터수집부로부터수신된기초데이터를교통정보제공서버에서처리및해석가능한데이터의포맷으로변환을시켜주는데이터변환부, 데이터변환부로부터변환된데이터를저장하는데이터저장부, 및데이터변환부에의해생성된데이터를교통정보제공서버로송신하고, 교통정보제공서버로부터업데이트된맵데이터를수신하는데이터송수신부를포함하는자율주행차량 ; 각자율주행차량으로부터데이터를수신하고, 복수의자율주행차량으로부터수신된데이터를이용하여생성된새로운맵데이터를상기각자율주행차량으로송신하는데이터송수신부, 상기각자율주행차량으로부터수신된정형화된데이터를제어부에서처리및해석가능한포맷의데이터로변환하는데이터변환부, 및상기변환된데이터를이용하여업데이트된맵데이터를생성하는맵데이터생성부를포함하는교통정보제공서버 ; 및상기교통정보제공서버로부터각맵데이터를수신하고, 보상데이터를교통정보제공서버로송신하고, 보상서버및교통정보제공서버에서데이터처리및해석이가능하도록소정의포맷으로변환하는데이터송수신 / 변환부, 데이터의속성을구분하여객관화하는데이터속성판단부, 상기데이터속성판단부에의해얻어진데이터속성을이용하여데이터의가치를판단하는데이터가치판단부, 상기데이터가치판단부에의해얻어진가치에대하여매핑되어지는보상금을산정하는보상산정부 ; 및각데이터별로산정된보상정보를저장하는데이터저장부를포함하는보상서버를포함하는클라우드기반의자율주행차량을위한차등보상형협력적맵데이터제공시스템을제공한다. 대표도면 분석결과종합 본발명의목적은차량들이주행하는도로혹은이러한도로인근의상황에대한정보를실시간으로제공받아이를업데이팅하고, 업데이트된맵데이터를모든자율주행차량에전송하여변화된도로환경에따른신속한대처를가능하게하여시간절감내지사고예방을통한안전운행을강화하는클라우드기반의자율주행차량을위한협력적주행상황인지시스템을제공함에있다
175 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 10 발명의명칭 단지내도로에서자율주행차량의위치및해딩정보제공장치및방법 출원인한국전자통신연구원특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 표준화된 GIS(Geographic Information System ) 지도와영상정보만을사용하여복잡한단지내도로에서자율주행차량의정확한위치및해딩을인식하여제공하는장치및방법을제시한다. 제시된장치는자율주행차량에설치되고해당자율주행차량의움직임에따른주변의영상을감지하는영상센서, 자율주행차량에설치되고단지내관리장치로부터무선전송되는단지내 GIS 지도를수신하는무선통신부, 및자율주행차량에설치되고영상센서로부터의영상정보와무선통신부를통한단지내 GIS 지도를근거로해당자율주행차량의위치및해딩을인식하는위치 / 해딩인식부를포함한다. 대표도면 분석결과종합 본발명은단지내도로에서자율주행차량의위치및해딩정보제공장치및방법에관한것으로, 보다상세하게는자율주행차량의단지내도로에서의주행및주차를위해해당자율주행차량의위치및해딩을추정하여제공하는장치및방법에관한것이다
176 부록. 연구개발관련특허조사 순서 11 발명의명칭 도로표지영상을이용한노선정보의자동인식장치및방법 출원인한국건설기술연구원특허번호 출원일 법적상태공개 ( ), 등록 ( ), 거절 ( ) 청구항 본발명은도로표지영상을이용한노선정보의자동인식장치및방법에관한것으로서, 더욱상세하게는, 도로표지영상으로부터노선에대한정보인노선의종류및번호그리고해당노선이향하고있는방향과노선이어떤다른노선으로연결되어있는지를자동으로인식하여도로표지판을관리자가매번육으로도로표시판의내용을확인하여수기로입력하지않게하여도로표지판관리를빠르고효율적이게하고, 도로표지판의노선번호에대한정보를자동으로인식하는것을통해자율주행자동차스스로가자신이달리는도로의정보를재확인할수있게하여자율주행의신뢰성을높이고, 도로표지판의노선번호에대한정보를자동으로인식하여자동차의네이비게이션, 디스플레이또는음성출력을통해운전자에게명확하게알려줌으로써운전자의육안에의한도로표지판내용의오인식을방지하는도로표지영상을이용한노선정보의자동인식장치및방법에관한것이다. 대표도면 분석결과종합 도로표지판의내용인노선번호의종류및번호와해당노선이향하고있는방향과해당노선이어떤다른노선으로연결되어있는지를자동으로인식할수있게하는것
177 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 12 발명의명칭 OTP( 오티피 ) 를이용한 V2X( 브이투엑스 ) 통신시스템 출원인 특허번호 출원일주식회사미래테크놀로지법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 본발명은 OTP 를이용한 V2X 통신시스템에관한것으로서, 더욱상세하게는자동차와외부기기가통신하고자할때보안중계센터를통해상대측고유 OTP 발생용비밀키를제공받은후송신데이타를자신이사용하는 OTP 를이용해서암호화하여송신하고, 수신데이타를상대측 OTP 를이용해서복호화하여해독하도록구성하므로서, 자동차와외부기기상호간통신이 OTP 에의해암호화됨에따라보안성을월등히향상시켜해킹에의해자동차에탑재된전장부품이오동작을일으키지않도록함은물론자율주행동작시주행안정성을더욱높여줄수있도록한 OTP 를이용한 V2X 통신시스템에관한것이다. 대표도면 분석결과종합 본발명은자동차와외부기기가통신하고자할때보안중계센터를통해상대측고유 OTP 발생용비밀키를제공받은후송신데이터를자신이사용하는 OTP 를이용해서암호화하여송신하고, 수신데이터를상대측 OTP 를이용해서복호화하여해독하도록구성하므로서, 자동차와외부기기상호간통신이 OTP 에의해암호화됨에따라보안성을월등히향상시켜해킹에의해자동차에탑재된전장부품이오동작을일으키지않도록함은물론자율주행동작시주행안정성을더욱높여줄수있도록한 OTP 를이용한 V2X 통신시스템을제공함을목적으로한다
178 부록. 연구개발관련특허조사 순서 13 발명의명칭자율주행차량에서의 IoT 통신연결정보제공방법 출원인경북대학교산학협력단특허번호 출원일 법적상태공개 (O), 등록 ( ), 거절 ( ) 본발명은자율주행차량내에위치하는사용자 IoT 기기와차량외부에위치하는주변 IoT 기기간의통신연결상태를판단하여그통신연결정보를표시출력함으로써, 사용자가자신의 IoT 기기와통신연결된주변 IoT 기기에대한연결상태를직접확인할수있도록해주는자율주행차량에서의 IoT 통신연결정보제공방법에관한것이다. 청구항 본발명에따른자율주행차량에서의 IoT 통신연결정보제공방법은자율주행차량에위치하는서비스단말에서차량내에위치하는사용자 IoT 기기를탐색하는제 1 단계와, 상기서비스단말에서카메라를통해획득한차량주변배경영상범위에위치하는주변 IoT 기기를탐색하는제 2 단계, 상기서비스단말에서상기제 2 단계에서탐색된주변 IoT 기기중사용자 IoT 기기와통신연결된주변 IoT 기기의신호감도를측정하는제 3 단계및, 상기서비스단말에서카메라로부터획득한배경영상에사용자 IoT 기기와주변 IoT 기기및, 사용자 IoT 기기와통신연결된주변 IoT 기기에대한통신연결라인을신호감도에대응하여합성하여표시출력하는제 4 단계를포함하여구성되는것을특징으로한다. 대표도면 분석결과 종합 본발명은자율주행차량내에위치하는사용자 IoT 기기와연결된주변 IoT 기기간의연결정보와차량외부에위치하는주변 IoT 기기에대한상태정보를증강현실기법을이용하여시각적으로표시출력함으로써, 사용자가자신이소지하고있는 IoT 기기들이본인이연결을의도한정상적인네트워크에연결되어있는지, 또그상태는어떠한지에대해확인을간편하게할수있도록해주는자율주행차량에서의 IoT 통신연결정보제공방법을제공함에그기술적목적이있음
, 등록 ( ), 거절 ( ) 청구항 일실시예에있어서, 자율주행차량에연관되는노선의위치및노선정보를획득하되, 상기노선은출발위치및목적지를포함한다. 위치및노선정보에기반하여상기노선의실시간교통정보를획득한다. 위치및노선정보및실시간교통정보에기반하여, 자율주행차량의주행모드를결정한다.")
179 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 14 발명의명칭 실시간교통정보에기반하여자율주행차량내에서콘텐츠를제공하는시스템및방법 출원인바이두유에스에이엘엘씨특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 일실시예에있어서, 자율주행차량에연관되는노선의위치및노선정보를획득하되, 상기노선은출발위치및목적지를포함한다. 위치및노선정보에기반하여상기노선의실시간교통정보를획득한다. 위치및노선정보및실시간교통정보에기반하여, 자율주행차량의주행모드를결정한다. 결정된주행모드에기반하여콘텐츠데이터베이스로부터획득한콘텐츠항목리스트에서콘텐츠항목을선택한다. 선택된콘텐츠항목을자율주행차량내의표시장치에표시한다. 대표도면 분석결과 종합 본발명의실시예는일반적으로콘텐츠검색및전송에관한것이다. 더욱상세하게, 본발명의실시예는자율주행차량내에서의콘텐츠검색및전송에관한것
180 부록. 연구개발관련특허조사 순서 15 발명의명칭 자율주행차량및교통관리시스템상에도로공사정보를제공하는장치및방법 출원인한국과학기술원특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 자율주행차량및교통관리시스템상에도로공사정보를제공하는장치및방법이개시된다. 공사정보제공장치는, 컴퓨터가판독가능한명령을실행하도록구현되는적어도하나의프로세서를포함하고, 도로상의공사구간에대해도로공사중임을나타내는시각적인안전장치로구성되고, 상기적어도하나의프로세서는, 상기공사구간과인접한차로를주행하는차량을대상으로상기공사구간과관련된도로공사정보를제공하는과정을처리할수있다. 대표도면 분석결과 종합 자율주행차량및교통관리시스템 (ITS, intelligent transport system) 상에도로공사정보를제공할수있는장치및방법을제공한다
181 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 16 발명의명칭영상기반교통표시인식장치및방법 출원인현대자동차주식회사특허번호 출원일 법적상태공개 ( ), 등록 (o), 거절 ( ) 청구항 본발명은영상기반교통표시인식장치및방법에관한것으로, 자율주행장치가교통표시정보및차량의현재위치에근거하여교통표시인식기능동작여부를결정하는단계와, 상기자율주행장치가상기교통표시인식기능의동작결정에따라교통표시인식장치를동작시키는단계와, 상기교통표시인식장치가차량주위의영상을획득하는단계와, 상기교통표시인식장치가상기영상에서관심영역을검출하는단계와, 상기교통표시인식장치가상기자율주행장치로부터제공받은차량정보및교통표시정보에근거하여상기관심영역에서교통표시를인식하는단계와, 상기교통표시의인식결과에대한검증을수행하는단계를포함하는것을특징으로하는영상기반교통표시인식방법. 대표도면 분석결과 종합 본발명은차량내 외부정보를이용하여차량에장착된카메라를통해획득한영상에서교통표시를신속하고정확하게인식할수있게한다. 또한, 본발명은인식결과에대한검증을통해인식결과에대한신뢰도를향상시킬수있다
182 부록. 연구개발관련특허조사 순서 17 발명의명칭교통신호인식방법및시스템 출원인현대자동차주식회사특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 본발명은차량의자율주행중신호등의인식률을높이는기술에관한것으로, 본발명에서는, 신호등의위치정보를확보하고 ; 현재차량의위치정보를확보하며 ; 상기신호등의위치정보와차량의위치정보를바탕으로차량에서촬영하는전방의영상중신호등의영상인식범위를결정하고 ; 상기영상인식범위에촬영된신호등영상을바탕으로점등된신호등의신호를판단및인식하는것을특징으로하는교통신호인식방법및시스템이소개된다. 대표도면 분석결과종합 본발명의목적은차량의자율주행중신호등의인식률을높이도록한교통신호인식방법및시스템을제공하는데있다
183 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 18 발명의명칭자율차량들에대한교통신호응답 출원인웨이모엘엘씨특허번호 출원일 법적상태공개 (O), 등록 ( ), 거절 ( ) 청구항 본개시내용의양태들은차량 (100) 이교차로 (502) 를계속통과해야하는지를결정하는것에관한것이다. 예를들어, 차량의컴퓨터들 (110) 중하나이상은교통신호등 (526) 이황색으로부터적색으로변화될시간을식별할수있다. 하나이상의컴퓨터들은또한교통신호등이황색으로부터적색으로변화될시간에차량의위치를추정할수있다. 교차로의시작지점 (350) 이식별될수있다. 교통신호등이황색으로부터적색으로변화될시간에차량의추정된위치가시작지점을지난적어도임계거리인지에기초하여, 컴퓨터들은차량이교차로를계속통과해야하는지를결정할수있다. 대표도면 분석결과종합 인지시스템으로부터의정보는차량의컴퓨터가다양한환경들에서차량을안전하게조종하는것을허용하기위해매우상세한맵정보와조합될수있다. 이렇게매우상세한맵정보는차량의환경의예상된조건들예컨대도로들의형상및위치, 교통신호들, 및다른객체들을설명할수있다. 이와관련하여, 인지시스템으로부터의정보및상세한맵정보는교차로들및교통신호들을수반하는주행결정들을할시에차량의컴퓨터를원조하기위해사용될수있다
184 부록. 연구개발관련특허조사 순서 19 발명의 명칭 주행상황예측을통한적응형순항제어장치및적응형순항제어방법 출원인현대오트론주식회사특허번호 출원일 법적상태공개 ( ), 등록 (o), 거절 ( ) 청구항 본발명의일실시예에따른적응형순항제어장치는, 현재위치로부터목적지까지의도로정보를수신하는통신장치 ; 당해차량과인접한타차량의주행상황을감지하는차량감지모듈 ; 및타차량의주행상황을고려하여, 당해차량의속도를조절하고, 도로정보를기초로차량의운행에방해가될수있는방해요소를파악하고, 방해요소의유무에따라서, 당해차량의운행방식을조절하는컨트롤러 ; 를포함한다. 대표도면 분석결과 종합 본발명은주행상황예측을통한적응형순항제어장치및적응형순항제어방법에관한것으로, 보다상세하게는차량이주행도로의교통혼잡상황이나신호체계등의주행상황을미리인지하고판단하여, 차량이자율주행을수행할경우에차량의가 / 감속운행을조정하는운전보조시스템및그제어방법에관한것이다
185 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 20 발명의명칭 차량위치보정제어장치와이를구비하는차량위치보정시스템및방법 출원인현대모비스주식회사특허번호 출원일 법적상태공개 ( ), 등록 (o), 거절 ( ) 청구항 본발명은분할된영역내에서대표차량을선정하고 V2V 통신및 V2I 통신을통해수신된 DGPS 보정신호를이용하여대표차량부터자신의위치를보정하는차량위치보정시스템과방법및차량위치보정제어장치를제안한다. 본발명에따른차량위치보정시스템은각소영역에위치하는차량들중에서제 1 대표차량을결정하는대표차량결정부 ; 및먼저 DGPS 보정값이제 1 대표차량으로전송되도록제어하며, 이후 DGPS 보정값이제 1 대표차량으로부터동일소영역내나머지차량들로전송되도록제어하는데이터전송제어부를포함하는차량위치보정제어장치 ; 기지국또는다른소영역에위치한제 2 대표차량으로부터 DGPS 보정값을수신하며, DGPS 보정값을기초로자신의위치를보정하는제 1 대표차량 ; 및제 1 대표차량으로부터수신된 DGPS 보정값을기초로자신의위치를보정하는나머지차량들을포함한다. 대표도면 분석결과종합 본발명은상기한문제점을해결하기위해안출된것으로서, 분할된영역내에서대표차량을선정하고차량간통신 (V2V; Vehicle to Vehicle) 및차량과기지국간통신 (V2I; Vehicle to Infrastructure) 을통해수신된 DGPS 보정신호를이용하여대표차량부터자신의위치를보정하는차량위치보정시스템과방법및차량위치보정제어장치를제안함을목적으로한다. 자율주행시스템의 localization 시스템에적용가능
186 부록. 연구개발관련특허조사 순서 21 발명의명칭 무선통신시스템에서통신을수행하는장치및이를위한방법 출원인삼성전자주식회사특허번호 출원일 법적상태공개 ( ), 등록 ( ), 거절 ( ) 청구항 전자장치가개시된다. 상기전자장치는, 제 1 통신방식및제 2 통신방식을지원하는통신회로, 및상기통신회로와전기적으로연결된적어도하나의프로세서를포함하되, 상기적어도하나의프로세서는, 상기제 1 통신방식을이용한통신중에적어도하나의전자장치에대한연결정보를획득하고, 상기획득된연결정보를이용하여상기적어도하나의전자장치중하나의전자장치와상기제 2 통신방식으로의통신연결을수행하도록설정될수있다. 대표도면 분석결과 종합 본문서에개시되는다양한실시예들은 V2X 통신에서 Wi-Fi 다이렉트통신으로신속하게이동하여고용량데이터를효과적으로송수신하는전자장치및방법을제공
187 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 22 발명의명칭 무선통신시스템에서 V2X 메시지전송을위한 MBMS 기반의자원을할당하기위한방법및장치 출원인엘지전자주식회사특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 무선통신시스템에서 V2X(vehicle-to-everything) 메시지전송을위해자원을할당하기위한방법및장치가제공된다. 첫번째해결책으로서, 사전구성을기반으로한방식이정의되며 V2X 서비스를위한특정한 TMGI(temporary mobile group identity) 이정의된다. 두번째해결책으로서, MCE(multi-cell/multicast coordination entity) 가차량단말 (UE; user equipment) 또는 (RSU; road side unit) UE 로부터전송된 V2X 메시지의양에기반하는무선자원에대한요청을 V2X 기능을지원하는 enb(enodeb) 또는 enb 유형 RSU 로부터수신하고, 상기무선자원에대한요청에대한응답으로 MBMS(multimedia broadcast multicast service) 스케줄링정보를 V2X 기능을지원하는 enb 또는 enb 유형 RSU 로전송한다. 대표도면 분석결과 종합 본발명은무선통신에관한것으로서, 보다상세하게는, 무선통신시스템에서 V2X(vehicle-to-everything) 메시지전송을위한 MBMS(multimedia broadcast multicast services) 기반의자원을할당하기위한방법및장치에관한것
188 부록. 연구개발관련특허조사 순서 23 발명의명칭 OTP( 오티피 ) 를이용한 V2X( 브이투엑스 ) 통신시스템 출원인주식회사미래테크놀로지특허번호 출원일 법적상태공개 (O), 등록 ( ), 거절 ( ) 청구항 본발명은 OTP 를이용한 V2X 통신시스템에관한것으로서, 더욱상세하게는자동차와외부기기가통신하고자할때보안중계센터를통해상대측고유 OTP 발생용비밀키를제공받은후송신데이타를자신이사용하는 OTP 를이용해서암호화하여송신하고, 수신데이타를상대측 OTP 를이용해서복호화하여해독하도록구성하므로서, 자동차와외부기기상호간통신이 OTP 에의해암호화됨에따라보안성을월등히향상시켜해킹에의해자동차에탑재된전장부품이오동작을일으키지않도록함은물론자율주행동작시주행안정성을더욱높여줄수있도록한 OTP 를이용한 V2X 통신시스템에관한것이다. 대표도면 분석결과종합 본발명은자동차와외부기기가통신하고자할때보안중계센터를통해상대측고유 OTP 발생용비밀키를제공받은후송신데이터를자신이사용하는 OTP 를이용해서암호화하여송신하고, 수신데이터를상대측 OTP 를이용해서복호화하여해독하도록구성하므로서, 자동차와외부기기상호간통신이 OTP 에의해암호화됨에따라보안성을월등히향상시켜해킹에의해자동차에탑재된전장부품이오동작을일으키지않도록함은물론자율주행동작시주행안정성을더욱높여줄수있도록한 OTP 를이용한 V2X 통신시스템을제공함을목적으로한다
189 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 24 발명의명칭 V2X 기반차량위성항법신호에대한오차보정데이터생성을위한방법, 노변장치및정책서버 출원인현대오토에버주식회사특허번호 출원일 법적상태공개 ( ), 등록 (O), 거절 ( ) 청구항 본발명은무선통신장치를이용하여주행중인차량으로교통정보를송신하는복수의노변장치가위성항법신호에대한오차보정데이터생성을위한네트워크를형성하는단계, 상기네트워크를형성하는마스터노변장치가상기위성항법신호에대한제 1 오차보정정보를생성하고상기네트워크를형성하는다른노변장치의제 2 오차보정정보를상기제 1 오차보정정보에결합시켜상기오차보정데이터를생성하는단계, 상기마스터노변장치가상기네트워크의서비스영역에위치하는상기차량으로상기오차보정데이터를방송 (broadcasting) 하는단계, 상기복수의노변장치가상태정보를생성하고상기상태정보에따라불량상태로판단되는노변장치가상기네트워크에서제거되면서상기네트워크가재형성되는단계, 및상기마스터노변장치가재형성된상기네트워크에대해상기오차보정데이터를생성하고상기차량으로상기오차보정데이터를방송하는단계를포함하는위성항법신호에대한오차보정데이터생성방법을제공한다. 대표도면 분석결과종합 본발명의목적은, 위성항법신호의수신상태가불량한도로를주행하는차량이, 고가의센서를사용하지않고, 정밀한측위가가능하도록하는기술을제공하는것
, 등록 ( ), 거절 ( ) 청구항 본발명은종래 LED 신호등에설치된가시광통신시스템의경우에, LED 신호등에서발광되는조도가불안정하고, 불규칙적이어서가시광송수신사이의거리가짧아지고, 수신신호크기가작아져통신이단절되는문제점과, LED 가시광통신의단점인빛의간섭에따른데이터손실이커서움직이는차량과의가시광통신이어려워, LED")
190 부록. 연구개발관련특허조사 순서 25 발명의명칭 출원인 서울과학기술대학교산학협력단 ( 주 ) 파이브텍 LED 신호등의칼라광정보를통한신호등객체주변기기로의 IoT 연계형스마트가시광통신장치및방법 특허번호 출원일 법적상태공개 (O), 등록 ( ), 거절 ( ) 청구항 본발명은종래 LED 신호등에설치된가시광통신시스템의경우에, LED 신호등에서발광되는조도가불안정하고, 불규칙적이어서가시광송수신사이의거리가짧아지고, 수신신호크기가작아져통신이단절되는문제점과, LED 가시광통신의단점인빛의간섭에따른데이터손실이커서움직이는차량과의가시광통신이어려워, LED 신호등에진입하는차량쪽으로차량정지및속도저감에관한멀티정보전송이어려워, 신호등주위의교통사고가빈번히발생되는문제점을개선하고자, LED 신호등형가시광송신모듈 (100), 스마트디바이스기반형가시광수신모듈 (200), 차량기반형가시광수신모듈 (300), 가시광제어모듈 (400) 로구성됨으로서, LED 신호등을발광시킴과동시에원하는측위지점의위치정보와멀티정보 (LBS 광고, 날씨정보, 교통정보, 자율주행정보 ) 를가시광 LED ID 데이터통신신호로발생시켜방출시킬수있어, LED 신호등과 0.1m~10m 근거리에위치한스마트디바이스및차량쪽으로위치정보와멀티정보 (LBS 광고, 날씨정보, 교통정보, 자율주행정보 ) 를 1:1 타켓방식으로정확하게전달받아사용자인식율을기존에비해 80% 인식시킬수있고, 이로인해 LED 신호등에서발생되는교통사고발생율을기존에비해 70% 줄일수있으며, 스마트디바이스및차량과의호환성이좋아, 설치비용과설치시간을기존에비해 70% 줄일수있고, 반사체또는광렌즈를통해 LED 신호등으로부터나오는 RGB 색발광의세기를강하게하여, LED 가시광통신의단점인빛의간섭에따른데이터손실을효율적으로줄일수있으며, 115.2kbps~250.3kbps 전송속도에서최대가시광송수신사이의거리를 0.1m~10m 로형성시킬수있고, 이로인해기존에비해가시광 LED ID 데이터전송율을 80% 향상시킬수있는 LED 신호등의칼라광정보를통한신호등객체주변기기로의위치정보 멀티정보인식장치및방법을제공하는데그목적이있다. 대표도면 분석결과 종합 본발명에서는사용자가스마트디바이스기반형가시광수신모듈이설치된스마트폰을 LED 신호등 ( 보행등 ) 에근접시키면, 스마트디바이스의화면상에가시광 LED ID 데이터통신신호에포함된위치정보와멀티정보에따른 LBS 광고, 날씨정보, 교통정보를표출시킬수있고, 차량기반형가시광수신모듈이설치된차량을 LED 신호등 ( 교통신호등 ) 에근접시키면, 차량자체의스마트제어기기가가시광 LED ID 데이터통신신호에포함된위치정보와멀티정보에따른 LBS 광고, 날씨정보, 교통정보, 자율주행용센싱데이터, 자율주행정보를수신받아, 차량의전반적인구동제어시키거나, 또는차량의디스플레이장치화면상에표출시킬수있는 LED 신호등의칼라광정보를통한신호등객체주변기기로의 IoT 연계형스마트가시광통신장치및방법에관한것임

191 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 26 발명의명칭실시간대규모교통정보수집방법및그운용시스템 출원인주식회사비트센싱특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 발명의목적은레이더또는라이다센서를이용하여교통정보를수집하되, 설치및정보수집에드는비용을낮추면서도필요로하는교통정보를도로별, 차선별로맞춤형제공하고자하는것이다. 그에따라본발명은도로의특정지점에레이더또는라이다센서를설치하여상기센서가차량감지를커버할수있는소정구간에대해차량의속도를관측하여관측된교통정보데이터를저장하고, 소정시간단위로누적된교통정보를이용하여차량속도 ( 차선별또는전체차선 ), 차량수 ( 차선별또는전체차선 ), 차량분류정보 ( 차선별또는전체차선 ), 차량의거리및각도등위치정보 ( 차선별또는전체차선 ), 각각의산술평균정보등을, 중앙서버에 IoT 망을이용하여전송하고, 상기중앙서버는각각의센서로부터수집된대규모교통정보를분석하여해당도로지점의교통상황표지판에실시간교통상황을표시하게하거나교통신호등연계하여신호주기를조정하게하거나네비게이션사업자서버로전송하여네비게이션이용자들에게제공되게하는것을특징으로하는교통정보수집방법을제공한다. 대표도면 분석결과종합 본발명의목적은다수의레이더또는라이다센서를이용하여교통정보를수집하되, 설치및정보수집에필요한주변장치를제거함으로써과도한투자비와지속적으로발생하는통신비용을낮추면서도실제필요한실시간교통정보를도로별로맞춤형으로제공하고자하는것이다. 본발명의또다른목적은상기와같이수집된교통정보를일반사용자, 교통방송국, 도로관리유관기관또는네비게이션사업자에게유료또는광고노출방식으로제공하는인터넷비지니스모델을제공하고자한다
192 부록. 연구개발관련특허조사 순서 27 발명의명칭 스마트펜스를이용한자율주행차를위한운행정보제공시스템 출원인주식회사코리트특허번호 출원일 법적상태공개 ( ), 등록 (o), 거절 ( ) 본발명은주변상황정보를획득하고취합하여자율주행차로송신하는자율주행차를위한운행정보제공시스템에관한것이다. 청구항 더욱구체적으로는, 자율주행차의운행경로설정을도와줄수있는자율주행차를위한운행정보제공시스템에있어서, 비행하면서제 1 주변상황정보를획득및송신할수있는무인비행체 (100); 제 2 주변상황정보를획득및송신하고상기무인비행체와연동되는 CCTV(200); 및상기제 1 주변상황정보와상기제 2 주변상황정보를수신하고취합및정리된운행정보를송신하는관제센터 (300) 를포함하는것을특징으로하는자율주행차를위한운행정보제공시스템에관한것이다. 대표도면 분석결과종합 본발명의목적은주변상황정보를취합하여자율주행차의운행경로설정에도움을주는데있다. 본발명의다른목적은일반도로, 고속도로, 국도, 인도및선로주변등에설치되어침입, 접촉, 접근및충격하는물체를감지하여, 경고하고위치와상황을알리는데있다. 본발명의또다른목적은무인비행체를이용하여제한없는시야각을제공하는데있다
193 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 28 발명의명칭도로표지판무선안내시스템 출원인세종신호 ( 주 ) 특허번호 출원일 법적상태공개 ( ), 등록 (o), 거절 ( ) 청구항 본발명은도로표지판무선안내시스템에관한것으로, 보다상세하게는길가주요교차로의표지판에서커넥트카의자율주행차량에이정표의내용을무선으로공급해주는것은물론각방향별이정표에그려져있는내용을각방향에무선데이터송신장치를통해정확한격자로데이터를전송하여안전한자율주행이되도록안내하는도로표지판무선안내시스템에관한것이다. 대표도면 분석결과종합 본발명은길가주요교차로의표지판에서커넥트카의자율주행차량에이정표의내용을무선으로공급해주는것은물론각방향별이정표에그려져있는내용을각방향에무선데이터송신장치를통해정확한격자로데이터를전송하여안전한자율주행이되도록안내하는도로표지판무선안내시스템을제공함에그주된목적이있다
, 등록 (O), 거절 ( ) 청구항 지능형분산컴퓨팅환경에서임의의조건에만족할때이동체에대한정보를해당담당자에게신속하게제공할수있는이동체정보관리시스템및이를이용한이동체정보관리방법이개시된다.")

194 부록. 연구개발관련특허조사 순서 29 발명의이동체정보관리시스템및이를이용한이동체명칭정보관리방법 출원인 동국대학교경주캠퍼스산학협력단 특허번호 출원일 법적상태 공개 ( ), 등록 (O), 거절 ( ) 청구항 지능형분산컴퓨팅환경에서임의의조건에만족할때이동체에대한정보를해당담당자에게신속하게제공할수있는이동체정보관리시스템및이를이용한이동체정보관리방법이개시된다. 이러한이동체정보관리시스템은적어도하나의엣지디바이스, 이동체제어장치, 서버및담당자단말기를포함한다. 상기엣지디바이스는이동체자체또는주변상황을센싱하여적어도하나의이동체정보를생성한다. 상기이동체제어장치는상기엣지디바이스로부터상기이동체정보를제공받는다. 상기서버는상기이동체제어장치로부터제공받은상기이동체정보를접근권한을갖고있는일반단말기에게로제공가능한상태로저장하고있다. 상기담당자단말기는유선또는무선네트워크를통해상기이동체제어장치와신호를주고받을수있다. 이때, 상기이동체제어장치는상기이동체정보중적어도하나의정보가기준조건에만족하다고판단하면, 상기이동체정보를상기담당자단말기로제공한다. 이로써, 해당담당자는긴급또는비상상황시상기담당자단말기를통해상기이동체정보를신속하게확인할수있다. 대표도면 분석결과종합
195 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 30 발명의명칭차량에구비된차량제어장치및차량의제어방법 출원인엘지전자주식회사특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 본발명은차량에구비된차량제어장치및차량의제어방법에관한것이다. 본발명의일실시예에따른차량제어장치는, 상기차량의위치정보를획득하고, 외부서버및타차량중적어도하나와통신을수행하도록형성된통신부, 차량과관련된정보를센싱하도록형성된센싱부및상기외부서버로부터지도정보와상기타차량으로부터상기타차량의위치정보를수신하도록상기통신부를제어하는프로세서를포함하고, 상기프로세서는, 상기획득된차량의위치정보와상기수신된타차량의위치정보를상기수신된지도정보에융합시키고, 상기융합된지도정보및상기센싱부를통해센싱된차량과관련된정보중적어도하나에근거하여차량을제어하는것을특징으로한다. 대표도면 분석결과종합 본발명의일목적은차량을최적화된방법으로자율주행시킬수있는차량제어장치및차량제어방법을제공할수있다
196 부록. 연구개발관련특허조사 순서 31 발명의명칭 무인운전시스템, 무인운전차이용요금부과서버및방법 출원인아이피랩주식회사특허번호 출원일 법적상태공개 (o), 등록 ( ), 거절 ( ) 청구항 무인운전시스템의무인운전차이용요금과금서버및방법을개시한다. 무인운전차이용요금과금서버는 GPS 정보및지역별무인운전차탑승요청수요정보를기반으로도심, 터미널, 공항, 기차역을포함하는무인운전차탑승요청수요가일정량이상인무인운전차탑승고수요지역을설정하고, 설정된무인운전차탑승고수요지역에서이동하는거리와탑승시간을기반으로무인운전차이용기준요금을설정하는기준요금설정모듈 ; 무인운전시스템에등록된무인운전차및탑승요청자의실시간위치, 탑승요청자에의해설정된출발지및목적지를파악하는위치파악모듈 ; 탑승요청자가설정한출발지와도착지, 출발예정시각및도착예정시각, 선호경로정보를포함하는탑승요청수요정보와무인운전차및탑승요청자의현재위치및실시간교통상황을기반으로무인운전차각각의이동경로를생성하는경로생성모듈 ; 생성된경로에따라무인운전차주행을제어하는주행제어모듈 ; 무인운전차의이동거리, 이동경로, 탑승시간및탑승요청자에의해설정된목적지의탑승요청수요정도에따라무인운전차에탑승한이용자에게과금되는요금을산출하는탑승요금산출모듈 ; 을포함한다. 대표도면 분석결과종합 본개시는무인운전차이용요금부과서버및방법에관한것으로구체적으로, 무인운전시스템에등록된무인운전차에탑승한이용자에게요금을부과하는서버및방법에관한것
197 자율주행차의도로주행을위한운행체계및교통인프라연구개발기획연구 순서 32 발명의명칭 적외선라인레이저를이용한무인주행차량의야간주행유도시스템및방법 출원인한국과학기술연구원특허번호 출원일 법적상태공개 ( ), 등록 (O), 거절 ( ) 청구항 본발명은적외선라인레이저를이용한무인주행차량의야간주행유도시스템및방법에관한것이다. 이를위해본발명의일실시예에따른무인주행차량의야간주행유도시스템 (10) 은무인주행차량과, 적외선레이저를방사하는적외선레이저유도장치와, 레이저유도장치를제어하여무인주행차량의주행을유도하기위한적외선레이저를방사하는서버를포함할수있다. 대표도면 분석결과종합 적외선라인레이저를이용하여어두운야간에서도무인주행차량의주행경로를유도할수있으며, 장애물을검출할수있는무인주행차량의야간주행유도시스템및방법을제공하는데그목적이있다

198 부록. 연구개발관련특허조사 순서 33 발명의명칭가시광통신장치를이용한지능형교통시스템 출원인경희대학교산학협력단특허번호 출원일 법적상태공개 ( ), 등록 (O), 거절 ( ) 청구항 본발명은가시광통신장치를이용한지능형교통시스템에관한것이다. 가시광통신장치는다수의사용자별정보데이터를특정주파수대역의반송주파수에실어서다수의사용자별신호로변조하는변조부 ; 변조부에서출력되는상기다수의사용자별신호에대해다수의사용자별로서로다르게할당되는확산코드를사용하여확산처리하여출력하는확산처리부 ; 확산처리부에서출력되는다수의사용자별확산신호를다중화하여출력하는다중화부 ; 조명기능수행을위해외부로부터입력되는조명신호와다중화부에서출력되는다수의사용자별신호확산중하나를선택하여출력하는신호선택부 ; 및전기신호를가시광영역의광신호로변환하여송신하는가시광발광다이오드 (LED) 를포함하며, 신호선택부로부터출력되는신호에대응되는가시광을송신하는가시광발광다이오드부를포함한다. 본발명에따르면, 기존의전파통신에서로간섭을주지않는다. 따라서, 전파의간섭으로인한기기의오작동을유발할수있는병원, 항공기내에서본발명에따른가시광통신장치를이용하여필요한데이터를전달할수있다. 대표도면 분석결과종합 본발명이이루고자하는하나의기술적과제는가시광을발산하는조명등을이용한가시광통신장치를차량대차량, 차량대노변등의통신에이용할수있는가시광통신장치를이용한지능형교통시스템을제공하는것이다
11 8 ( ), 56,. 1. 선제적규제혁파로드맵추진배경및의의 - 2 -
, 56,. 1. 선제적규제혁파로드맵추진배경및의의 - 2 -") 보도자료 ( 배포 ) 2018. 11. 7( 수 ) * 엠바고 : 11 월 8 일 ( 목 ) 11:00( 국정현안점검조정회의종료 ) 이후사용 비고 담당 # 브리핑 : 11.7( 수 ) 11:00, 정부세종청사, 규제조정실장 # 공동배포 : 법무부, 과기정통부, 행안부, 국토부, 방통위, 금융위, 경찰청 국무조정실규제기획과제과 과장한동희, 사무관최진수 (044-200-2911,
보도자료 ( 배포 ) 2018. 11. 7( 수 ) * 엠바고 : 11 월 8 일 ( 목 ) 11:00( 국정현안점검조정회의종료 ) 이후사용 비고 담당 # 브리핑 : 11.7( 수 ) 11:00, 정부세종청사, 규제조정실장 # 공동배포 : 법무부, 과기정통부, 행안부, 국토부, 방통위, 금융위, 경찰청 국무조정실규제기획과제과 과장한동희, 사무관최진수 (044-200-2911,
< 선제적규제혁파로드맵 3 대핵심요소 > ( 미래예측 ) 미래발전양상예측 다양한시나리오도출 규제이슈발굴 ( 융합연구 ) 융복합적성장신산업특성고려, 다분야전문기관 다부처협동연구 ( 연동계획 ) 신산업불확실성을감안, 주기적재설계를통해변화에탄력대응 < 선제적규제혁파로드맵기대
 미래발전양상예측 다양한시나리오도출 규제이슈발굴 ( 융합연구 ) 융복합적성장신산업특성고려, 다분야전문기관 다부처협동연구 ( 연동계획 ) 신산업불확실성을감안, 주기적재설계를통해변화에탄력대응 < 선제적규제혁파로드맵기대") 보도자료 ( 배포 ) 2018. 11. 7( 수 ) * 엠바고 : 11 월 8 일 ( 목 ) 11:00( 국정현안점검조정회의종료 ) 이후사용 비고 담당 # 공동배포 : 법무부, 과기정통부, 행안부, 국토부, 방통위, 금융위, 경찰청 국무조정실규제기획과제과 국토교통부첨단자동차기술과 경찰청교통운영과 행정안전부개인정보보호협력과 방송통신위원회개인정보보호윤리과 법무부
보도자료 ( 배포 ) 2018. 11. 7( 수 ) * 엠바고 : 11 월 8 일 ( 목 ) 11:00( 국정현안점검조정회의종료 ) 이후사용 비고 담당 # 공동배포 : 법무부, 과기정통부, 행안부, 국토부, 방통위, 금융위, 경찰청 국무조정실규제기획과제과 국토교통부첨단자동차기술과 경찰청교통운영과 행정안전부개인정보보호협력과 방송통신위원회개인정보보호윤리과 법무부
2016년 신호등 4월호 내지A.indd
 www.koroad.or.kr E-book 04 2016. Vol. 428 30 C o n t e n t s 08 50 24 46 04 20 46,, 06 24 50!! 08? 28, 54 KoROAD(1)! 12 30 58 KoROAD(2) (School Zone) 16 60 34 18 62 38, 64 KoROAD, 40 11 (IBA) 4!, 68. 428
www.koroad.or.kr E-book 04 2016. Vol. 428 30 C o n t e n t s 08 50 24 46 04 20 46,, 06 24 50!! 08? 28, 54 KoROAD(1)! 12 30 58 KoROAD(2) (School Zone) 16 60 34 18 62 38, 64 KoROAD, 40 11 (IBA) 4!, 68. 428
2002report hwp
 2002 연구보고서 210-23 가족법상친권 양육권및면접교섭권제도의실효성확보방안연구 한국여성개발원 발간사 연구요약. 연구의목적 . 가족법상친권 양육권및면접교섭권제도의내용 1. 친권에관한검토 2. 양육권에관한검토 3. 면접교섭권에관한검토 4. 관련문제점 . 가족법상친권 양육권 면접교섭권제도의시행현황 1. 공식통계를통해본시행현황 2. 친권 양육권 면접교섭권관련법원실무
2002 연구보고서 210-23 가족법상친권 양육권및면접교섭권제도의실효성확보방안연구 한국여성개발원 발간사 연구요약. 연구의목적 . 가족법상친권 양육권및면접교섭권제도의내용 1. 친권에관한검토 2. 양육권에관한검토 3. 면접교섭권에관한검토 4. 관련문제점 . 가족법상친권 양육권 면접교섭권제도의시행현황 1. 공식통계를통해본시행현황 2. 친권 양육권 면접교섭권관련법원실무
Ⅰ Ⅱ Ⅲ Ⅳ
 제 2 차유비쿼터스도시종합계획 국토교통부 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ - 4 - 1 배경및법적근거 2 계획의수립방향 - 3 - 3 계획수립의성격및역할 4 계획수립경위 - 4 - Ⅱ 1 국내외여건변화 가. 현황 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - 나. 문제점및기본방향 - 14 - 2 국내 U-City 현황 가. 현황 -
제 2 차유비쿼터스도시종합계획 국토교통부 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ - 4 - 1 배경및법적근거 2 계획의수립방향 - 3 - 3 계획수립의성격및역할 4 계획수립경위 - 4 - Ⅱ 1 국내외여건변화 가. 현황 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - 나. 문제점및기본방향 - 14 - 2 국내 U-City 현황 가. 현황 -
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (
 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (") 제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
120330(00)(1~4).indd
(1~4).indd") 도시개발법시행규칙 [ 별지제 5 호서식 ] 색상이어두운란은가작성하지않습니다. 접수번호 접수일자 성명 ( 법인의명칭및대표자성명 ) 주민등록번호 ( 법인등록번호 ) 전화번호 구역명 동의내용 구역면적 ( m2 ) 사업방식 시행자에관한사항 본인은 도시개발법 제4조제4항및영제6조제6항에따라환지방식의도시개발계획에대하여시행자등에게설명을듣고위내용 ( 개발계획수립과정에서관계기관협의및도시계획위원회의심의결과등에따라개발계획이변경되는경우를포함합니다
도시개발법시행규칙 [ 별지제 5 호서식 ] 색상이어두운란은가작성하지않습니다. 접수번호 접수일자 성명 ( 법인의명칭및대표자성명 ) 주민등록번호 ( 법인등록번호 ) 전화번호 구역명 동의내용 구역면적 ( m2 ) 사업방식 시행자에관한사항 본인은 도시개발법 제4조제4항및영제6조제6항에따라환지방식의도시개발계획에대하여시행자등에게설명을듣고위내용 ( 개발계획수립과정에서관계기관협의및도시계획위원회의심의결과등에따라개발계획이변경되는경우를포함합니다
ㅇ ㅇ
 ㅇ ㅇ ㅇ 1 ㆍ 2 3 4 ㅇ 1 ㆍ 2 3 ㅇ 1 2 ㆍ ㅇ 1 2 3 ㆍ 4 ㆍ 5 6 ㅇ ㆍ ㆍ 1 2 ㆍ 3 4 5 ㅇ 1 2 3 ㅇ 1 2 3 ㅇ ㅇ ㅇ 붙임 7 대추진전략및 27 개세부추진과제 제 5 차국가공간정보정책기본계획 (2013~2017) 2013. 10 국토교통부 : 2013 2017 차 례 제 1 장창조사회를견인하는국가공간정보정책
ㅇ ㅇ ㅇ 1 ㆍ 2 3 4 ㅇ 1 ㆍ 2 3 ㅇ 1 2 ㆍ ㅇ 1 2 3 ㆍ 4 ㆍ 5 6 ㅇ ㆍ ㆍ 1 2 ㆍ 3 4 5 ㅇ 1 2 3 ㅇ 1 2 3 ㅇ ㅇ ㅇ 붙임 7 대추진전략및 27 개세부추진과제 제 5 차국가공간정보정책기본계획 (2013~2017) 2013. 10 국토교통부 : 2013 2017 차 례 제 1 장창조사회를견인하는국가공간정보정책
☆5.명묘희(2차수정)경찰학연구제33호.hwp
경찰학연구제33호.hwp") 교통수단의구분및관리에대한도로교통관계법령개정방안연구 The Revision of Road Traffic Act of Classification and Management of Diverse Transport Modes 명묘희 * Ⅰ. 서론 1) Ⅱ. 선행연구및정책동향 Ⅲ. 교통수단구분및관리에관한입법현황 Ⅳ. 국제협약및외국사례에대한비교법적고찰 Ⅴ. 교통수단관리의문제점분석및정책제언
교통수단의구분및관리에대한도로교통관계법령개정방안연구 The Revision of Road Traffic Act of Classification and Management of Diverse Transport Modes 명묘희 * Ⅰ. 서론 1) Ⅱ. 선행연구및정책동향 Ⅲ. 교통수단구분및관리에관한입법현황 Ⅳ. 국제협약및외국사례에대한비교법적고찰 Ⅴ. 교통수단관리의문제점분석및정책제언
장애인건강관리사업
 장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
 ii iv 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 2 3 4 5 1 3 6 37 제품군 제품분류 39 제출물관리대장 41 43 45 47 < 접수번호 > 관리번호 평가결과보고서 < 평가대상제품명 > 년월일 < 평가기관명 > 49 제 1 장개요 o 일반적으로다음의사항을포함한다. - 정보보호제품평가인증관련규정 (
ii iv 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 2 3 4 5 1 3 6 37 제품군 제품분류 39 제출물관리대장 41 43 45 47 < 접수번호 > 관리번호 평가결과보고서 < 평가대상제품명 > 년월일 < 평가기관명 > 49 제 1 장개요 o 일반적으로다음의사항을포함한다. - 정보보호제품평가인증관련규정 (
 신 재생에너지공급의무화 (RPS) 제도 Contents - 목차 - 1. 신에너지및재생에너지개발 이용 보급촉진법령 2. 신 재생에너지공급의무화제도관리및운영지침 3. 공급인증서발급및거래시장운영에관한규칙 신에너지및재생에너지 개발 이용 보급촉진법령 신 재생에너지공급의무화 (RPS) 제도 5 법률시행령시행규칙 신에너지및재생에너지개발 이용 보급촉진법 신에너지및재생에너지개발
신 재생에너지공급의무화 (RPS) 제도 Contents - 목차 - 1. 신에너지및재생에너지개발 이용 보급촉진법령 2. 신 재생에너지공급의무화제도관리및운영지침 3. 공급인증서발급및거래시장운영에관한규칙 신에너지및재생에너지 개발 이용 보급촉진법령 신 재생에너지공급의무화 (RPS) 제도 5 법률시행령시행규칙 신에너지및재생에너지개발 이용 보급촉진법 신에너지및재생에너지개발
2016년 신호등 1월호 내지(1219).indd
.indd") www.koroad.or.kr E-book 01 2016. Vol. 425 06 C o n t e n t s 58 48 18 22 04 CEO 18 2016 48! 06 22 52,, 2 08 26,! 56 KoROAD,! 14 28 58 16 32 60,?! 36, 62?, 38, 64 KoROAD?. (IBA) 4! 425 2016 1 4 1980 8 22.
www.koroad.or.kr E-book 01 2016. Vol. 425 06 C o n t e n t s 58 48 18 22 04 CEO 18 2016 48! 06 22 52,, 2 08 26,! 56 KoROAD,! 14 28 58 16 32 60,?! 36, 62?, 38, 64 KoROAD?. (IBA) 4! 425 2016 1 4 1980 8 22.
학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental Ta
 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental Ta") www.sen.go.kr 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의 시설 설비및교구기준연구 2012. 10. 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental
www.sen.go.kr 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의 시설 설비및교구기준연구 2012. 10. 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental
2016년 신호등 3월호 내지A.indd
 www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
농림축산식품부장관귀하 본보고서를 미생물을활용한친환경작물보호제및비료의제형화와현장적용매뉴 얼개발 ( 개발기간 : ~ ) 과제의최종보고서로제출합니다 주관연구기관명 : 고려바이오주식회사 ( 대표자 ) 김영권 (
 과제의최종보고서로제출합니다 주관연구기관명 : 고려바이오주식회사 ( 대표자 ) 김영권 (") 농림축산식품부장관귀하 본보고서를 미생물을활용한친환경작물보호제및비료의제형화와현장적용매뉴 얼개발 ( 개발기간 :2014. 7. 29 ~ 2016. 7. 28.) 과제의최종보고서로제출합니다. 2016. 7. 28. 주관연구기관명 : 고려바이오주식회사 ( 대표자 ) 김영권 ( 인 ) 협동연구기관명 : 목원대학교산학협력단 ( 대표자 ) 고대식 ( 인 ) 협동연구기관명
농림축산식품부장관귀하 본보고서를 미생물을활용한친환경작물보호제및비료의제형화와현장적용매뉴 얼개발 ( 개발기간 :2014. 7. 29 ~ 2016. 7. 28.) 과제의최종보고서로제출합니다. 2016. 7. 28. 주관연구기관명 : 고려바이오주식회사 ( 대표자 ) 김영권 ( 인 ) 협동연구기관명 : 목원대학교산학협력단 ( 대표자 ) 고대식 ( 인 ) 협동연구기관명
<312E20C0AFC0CFC4B3B5E55F5352444320C0FCC0DAB1E2C6C720B1B8B8C5BBE7BEE7BCAD2E687770>
 페이지 2 / 6 첨부 1. 공급품 목록 및 납기일정 번호 품명 모델명/사양 Vendor 단위 수량 납기 비고 1 (샘플기판) 6Layer, FR-4, 1.6T, 1온스, 2 (샘플기판) 3 (샘플기판) 4 (샘플기판) 5 (샘플기판) FRONT PANEL BOARD 3종 1. 샘플기판은 Board 별 성능시험용 2. 샘플 기판 후 Board 별 육안점검 및
페이지 2 / 6 첨부 1. 공급품 목록 및 납기일정 번호 품명 모델명/사양 Vendor 단위 수량 납기 비고 1 (샘플기판) 6Layer, FR-4, 1.6T, 1온스, 2 (샘플기판) 3 (샘플기판) 4 (샘플기판) 5 (샘플기판) FRONT PANEL BOARD 3종 1. 샘플기판은 Board 별 성능시험용 2. 샘플 기판 후 Board 별 육안점검 및
- 2 -
 - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
- 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
 > 국가기술자격검정시행계획 2015. 11. 2016 - 4 - 1. 근거 2. 기본방침 - 1 - 3. 세부시행계획 - 2 - - 3 - - 4 - 4. 검정별시행계획 - 5 - - 6 - - 7 - 기술사 종목별시행회 108 110 108 110 108 110 108 109 110 108 109 110 108 109 110 108
> 국가기술자격검정시행계획 2015. 11. 2016 - 4 - 1. 근거 2. 기본방침 - 1 - 3. 세부시행계획 - 2 - - 3 - - 4 - 4. 검정별시행계획 - 5 - - 6 - - 7 - 기술사 종목별시행회 108 110 108 110 108 110 108 109 110 108 109 110 108 109 110 108
ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9
![ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9](/thumbs/40/22040462.jpg "ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9") 오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
ICT À¶ÇÕÃÖÁ¾
 Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 국제개발협력평가소위원회
 '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 국제개발협력평가소위원회") ( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 2016. 2. 16. 국제개발협력평가소위원회 제 20 차 국제개발협력 평가소위원회 회의자료 2 0 1 6 ᆞ 2 ᆞ 16 국제개발협력 평가소위원회
( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 2016. 2. 16. 국제개발협력평가소위원회 제 20 차 국제개발협력 평가소위원회 회의자료 2 0 1 6 ᆞ 2 ᆞ 16 국제개발협력 평가소위원회
목 차
 Ⅴ. 광교지구택지개발사업지구단위계획결정 ( 변경 ) 도서 목 차 Ⅴ. 광교지구택지개발사업지구단위계획결정 ( 변경 ) 도서 1. 지구단위계획구역결정 ( 변경 ) 조서 가. 총괄 ( 변경없음 ) 도면표시번호 구역명위치 기정 면 적 ( m2 ) 변경후 변경 계 1단계 2단계 비고 - 수원시영통구매탄동, 이의동, 광교지구원천동, 하동, 팔달구우만동, 제1종지구단위계장안구연무동일원획구역용인시수지구상현동,
Ⅴ. 광교지구택지개발사업지구단위계획결정 ( 변경 ) 도서 목 차 Ⅴ. 광교지구택지개발사업지구단위계획결정 ( 변경 ) 도서 1. 지구단위계획구역결정 ( 변경 ) 조서 가. 총괄 ( 변경없음 ) 도면표시번호 구역명위치 기정 면 적 ( m2 ) 변경후 변경 계 1단계 2단계 비고 - 수원시영통구매탄동, 이의동, 광교지구원천동, 하동, 팔달구우만동, 제1종지구단위계장안구연무동일원획구역용인시수지구상현동,
목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 목재제품의종류 국내목재산업현황 목재산업트렌드분석및미래시
 목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
PERFORMANCE technology the all-new bmw 5 series. dynamic 06 business 14 comfort 20 safety 22 model LineuP 24 TecHnicaL data 26 bmw service 28 bmw kore
 sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
목 차 주요내용요약 1 Ⅰ. 서론 3 Ⅱ. 스마트그리드산업동향 6 1. 특징 2. 시장동향및전망 Ⅲ. 주요국별스마트그리드산업정책 17 Ⅳ. 미국의스마트그리드산업동향 스마트그리드산업구조 2. 스마트그리드가치사슬 3. 스마트그리드보급현황 Ⅴ. 미국의스마트그리드정
 2012-02 2012. 1. 13 미국스마트그리드산업의 Value Chain 및정책동향 주요내용요약 서론 스마트그리드산업동향 주요국별스마트그리드산업정책 미국의스마트그리드산업동향 미국의스마트그리드정책동향 21세기스마트그리드산업전략 결론 작성김정욱책임연구원, 미국거점 kjwcow@kiat.or,kr +1-404-477-3288 감수조영희팀장, 국제협력기획팀 yhcho@kiat.or.kr
2012-02 2012. 1. 13 미국스마트그리드산업의 Value Chain 및정책동향 주요내용요약 서론 스마트그리드산업동향 주요국별스마트그리드산업정책 미국의스마트그리드산업동향 미국의스마트그리드정책동향 21세기스마트그리드산업전략 결론 작성김정욱책임연구원, 미국거점 kjwcow@kiat.or,kr +1-404-477-3288 감수조영희팀장, 국제협력기획팀 yhcho@kiat.or.kr
발간등록번호
 발간등록번호 3. 보고서요약서 보고서요약서 - 2 - - 3 - 4. 국문요약문 - 4 - 5. 영문요약문 < SUMMARY > - 5 - 6. 영문목차 < CONTENTS > - 6 - - 7 - 7. 본문목차 목차 - 8 - - 9 - 제 1 장. 연구개발과제의개요 - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 -
발간등록번호 3. 보고서요약서 보고서요약서 - 2 - - 3 - 4. 국문요약문 - 4 - 5. 영문요약문 < SUMMARY > - 5 - 6. 영문목차 < CONTENTS > - 6 - - 7 - 7. 본문목차 목차 - 8 - - 9 - 제 1 장. 연구개발과제의개요 - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 -
제 2 차 (2013~2015) 어린이식생활안전관리종합계획
 어린이식생활안전관리종합계획") 제 2 차 (2013~2015) 어린이식생활안전관리종합계획 2012. 9 목 차 추진배경 1 주요성과와반성 3 정책과여건 11 추진체계 16 세부추진과제 21 1. 어린이기호식품안전판매환경조성 23 1-1. 어린이식품안전보호구역지정및관리강화 26 1-2. 어린이기호식품판매환경개선 30 2. 어린이식생활안심확보를위한안전공급체계구축 39 2-1. 어린이단체급식의안전관리및품질개선
제 2 차 (2013~2015) 어린이식생활안전관리종합계획 2012. 9 목 차 추진배경 1 주요성과와반성 3 정책과여건 11 추진체계 16 세부추진과제 21 1. 어린이기호식품안전판매환경조성 23 1-1. 어린이식품안전보호구역지정및관리강화 26 1-2. 어린이기호식품판매환경개선 30 2. 어린이식생활안심확보를위한안전공급체계구축 39 2-1. 어린이단체급식의안전관리및품질개선
< C617720BBF3B4E3BBE7B7CAC1FD20C1A632B1C72E687770>
 IT&Law 상담사례집 - 제 2 권 - IT&Law 상담사례집제2권 - 1 - 제 1 장프로그램저작권일반 - 2 - IT&Law 상담사례집제2권 - 3 - 제 1 장프로그램저작권일반 - 4 - IT&Law 상담사례집제2권 - 5 - 제 1 장프로그램저작권일반 - 6 - IT&Law 상담사례집제2권 - 7 - 제 1 장프로그램저작권일반 - 8 -
IT&Law 상담사례집 - 제 2 권 - IT&Law 상담사례집제2권 - 1 - 제 1 장프로그램저작권일반 - 2 - IT&Law 상담사례집제2권 - 3 - 제 1 장프로그램저작권일반 - 4 - IT&Law 상담사례집제2권 - 5 - 제 1 장프로그램저작권일반 - 6 - IT&Law 상담사례집제2권 - 7 - 제 1 장프로그램저작권일반 - 8 -
담당부서 배포일시 대한민국임시정부수립 보도참고자료 ( 금) 총 3매 2019년 4월 11일은 100주년기념일입니다 과장이창기사무관김진후주무관이동우첨단자동차기술과담당자,, (044) , 3849 보도일시즉시보도가능합니다. 자율주행자동차상
 총 3매 2019년 4월 11일은 100주년기념일입니다 과장이창기사무관김진후주무관이동우첨단자동차기술과담당자,, (044) , 3849 보도일시즉시보도가능합니다. 자율주행자동차상") 담당부서 배포일시 대한민국임시정부수립 보도참고자료 019. 4. 5.( 금) 총 매 019년 4월 11일은 100주년기념일입니다 과장이창기사무관김진후주무관이동우첨단자동차기술과담당자,, (044) 01-848, 849 보도일시즉시보도가능합니다. 자율주행자동차상용화촉진및지원에관한법률 제정안, 국회통과 자율주행차상용화에대비한법적기틀마련 자율주행자동차상용화촉진및지원에관한법률
담당부서 배포일시 대한민국임시정부수립 보도참고자료 019. 4. 5.( 금) 총 매 019년 4월 11일은 100주년기념일입니다 과장이창기사무관김진후주무관이동우첨단자동차기술과담당자,, (044) 01-848, 849 보도일시즉시보도가능합니다. 자율주행자동차상용화촉진및지원에관한법률 제정안, 국회통과 자율주행차상용화에대비한법적기틀마련 자율주행자동차상용화촉진및지원에관한법률
CR2006-41.hwp
 연구책임자 가나다 순 머 리 말 2006년 12월 한국교육학술정보원 원장 - i - - ii - - iii - 평가 영역 1. 교육계획 2. 수업 3. 인적자원 4. 물적자원 5. 경영과 행정 6. 교육성과 평가 부문 부문 배점 비율(%) 점수(점) 영역 배점 1.1 교육목표 3 15 45점 1.2 교육과정 6 30 (9%) 2.1 수업설계 6 30 2.2
연구책임자 가나다 순 머 리 말 2006년 12월 한국교육학술정보원 원장 - i - - ii - - iii - 평가 영역 1. 교육계획 2. 수업 3. 인적자원 4. 물적자원 5. 경영과 행정 6. 교육성과 평가 부문 부문 배점 비율(%) 점수(점) 영역 배점 1.1 교육목표 3 15 45점 1.2 교육과정 6 30 (9%) 2.1 수업설계 6 30 2.2
3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 -
 안양시도로조명시설설치및관리에관한조례안 1. 제정이유 2. 주요내용 - 1 - 3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 - 안양시도로조명시설설치및관리에관한조례안 - 3 - ➃ - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 별표 1 도로및교통의종류에따른도로조명등급 ( 제 6 조관련 ),,.,,,,,
안양시도로조명시설설치및관리에관한조례안 1. 제정이유 2. 주요내용 - 1 - 3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 - 안양시도로조명시설설치및관리에관한조례안 - 3 - ➃ - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 별표 1 도로및교통의종류에따른도로조명등급 ( 제 6 조관련 ),,.,,,,,
[11하예타] 교외선 인쇄본_ver3.hwp
![[11하예타] 교외선 인쇄본_ver3.hwp](/thumbs/81/84006372.jpg "[11하예타] 교외선 인쇄본_ver3.hwp") 2012 년도예비타당성조사보고서 교외선 ( 능곡 ~ 의정부 ) 철도사업 2012. 7. 요약 요약 제 1 장예비타당성조사의개요 1. 사업추진배경 2000 5 16, 2004 4 1,, 2006 -,, 39,., ~~, 2. 사업의추진경위및추진주체 2004. 12: (~) () - 21 (B/C=0.34). 2010. 04~2012. 02: (~) () - (B/C=0.53,
2012 년도예비타당성조사보고서 교외선 ( 능곡 ~ 의정부 ) 철도사업 2012. 7. 요약 요약 제 1 장예비타당성조사의개요 1. 사업추진배경 2000 5 16, 2004 4 1,, 2006 -,, 39,., ~~, 2. 사업의추진경위및추진주체 2004. 12: (~) () - 21 (B/C=0.34). 2010. 04~2012. 02: (~) () - (B/C=0.53,
¾Æµ¿ÇÐ´ë º»¹®.hwp
 11 1. 2. 3. 4. 제2장 아동복지법의 이해 12 4).,,.,.,.. 1. 법과 아동복지.,.. (Calvert, 1978 1) ( 公 式 的 ).., 4),. 13 (, 1988 314, ). (, 1998 24, ).. (child welfare through the law) (Carrier & Kendal, 1992). 2. 사회복지법의 체계와
11 1. 2. 3. 4. 제2장 아동복지법의 이해 12 4).,,.,.,.. 1. 법과 아동복지.,.. (Calvert, 1978 1) ( 公 式 的 ).., 4),. 13 (, 1988 314, ). (, 1998 24, ).. (child welfare through the law) (Carrier & Kendal, 1992). 2. 사회복지법의 체계와
위탁연구 기능경기시스템선진화방안
 위탁연구 2016-4 기능경기시스템선진화방안 제출문 한국산업인력공단이사장귀하 이보고서를한국산업인력공단위탁연구과제 기능 경기시스템선진화방안 의최종보고서로제출합니 다. 2016. 6 한국고용노사관계학회 회장조준모 연구진연구책임자 : 고혜원 ( 한국직업능력개발원선임연구위원 ) 참여연구자 : 김봄이 ( 한국직업능력개발원부연구위원 ) 연구보조원 : 전희선 차례 i
위탁연구 2016-4 기능경기시스템선진화방안 제출문 한국산업인력공단이사장귀하 이보고서를한국산업인력공단위탁연구과제 기능 경기시스템선진화방안 의최종보고서로제출합니 다. 2016. 6 한국고용노사관계학회 회장조준모 연구진연구책임자 : 고혜원 ( 한국직업능력개발원선임연구위원 ) 참여연구자 : 김봄이 ( 한국직업능력개발원부연구위원 ) 연구보조원 : 전희선 차례 i
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 한국직업자격학회
 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업
 2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업 목차 i 목 차 iv 목차 표목차 목차 v vi 목차 목차 vii 그림목차 viii 목차 요 약 요약 1 요 약 제 1 장사업개요및조사방법 4 차세대바이오그린 21 사업사업계획적정성재검토보고서 : * ( 15 ) 요약 5 : 6 차세대바이오그린 21 사업사업계획적정성재검토보고서 요약 7 8
2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업 목차 i 목 차 iv 목차 표목차 목차 v vi 목차 목차 vii 그림목차 viii 목차 요 약 요약 1 요 약 제 1 장사업개요및조사방법 4 차세대바이오그린 21 사업사업계획적정성재검토보고서 : * ( 15 ) 요약 5 : 6 차세대바이오그린 21 사업사업계획적정성재검토보고서 요약 7 8
2016년 신호등 10월호 내지.indd
 www.koroad.or.kr E-book 10 2016. Vol. 434 62 C o n t e n t s 50 58 46 24 04 20 46 06 08, 3 3 10 12,! 16 18 24, 28, 30 34 234 38? 40 2017 LPG 44 Car? 50 KoROAD(1) 2016 54 KoROAD(2), 58, 60, 62 KoROAD 68
www.koroad.or.kr E-book 10 2016. Vol. 434 62 C o n t e n t s 50 58 46 24 04 20 46 06 08, 3 3 10 12,! 16 18 24, 28, 30 34 234 38? 40 2017 LPG 44 Car? 50 KoROAD(1) 2016 54 KoROAD(2), 58, 60, 62 KoROAD 68
목 차 제1장과제개요 1 1. 개요 1 2. 사업목표 1 3. 주요연구개발내용 1 4. 활용계획및기대효과 1 제2장항공기비행절차및공역설계프로그램개발 2 1. 연구의개요 2 2. 연구의필요성 3 3. 정부지원의타당성 7 4. 국내 외기술개발동향 8 5. 중복성검토결과 1
 목 차 제1장과제개요 1 1. 개요 1 2. 사업목표 1 3. 주요연구개발내용 1 4. 활용계획및기대효과 1 제2장항공기비행절차및공역설계프로그램개발 2 1. 연구의개요 2 2. 연구의필요성 3 3. 정부지원의타당성 7 4. 국내 외기술개발동향 8 5. 중복성검토결과 17 6. 세부연구개발내용 18 7. 기술개발효과 26 8. 기술개발성과활용방안 29 9. 연구개발추진전략
목 차 제1장과제개요 1 1. 개요 1 2. 사업목표 1 3. 주요연구개발내용 1 4. 활용계획및기대효과 1 제2장항공기비행절차및공역설계프로그램개발 2 1. 연구의개요 2 2. 연구의필요성 3 3. 정부지원의타당성 7 4. 국내 외기술개발동향 8 5. 중복성검토결과 17 6. 세부연구개발내용 18 7. 기술개발효과 26 8. 기술개발성과활용방안 29 9. 연구개발추진전략
untitled
 국문요약....,,... 2,,. 3.,. 4. 5. Abstract Demographic change is greatly accelerating owing to the increasingly low birth rate and aging population in Korea. In particular, the increase in the number of elderly
국문요약....,,... 2,,. 3.,. 4. 5. Abstract Demographic change is greatly accelerating owing to the increasingly low birth rate and aging population in Korea. In particular, the increase in the number of elderly
I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 )
 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 )") KS 인증공장심사항목해설서 2013. 3 한국표준협회 I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 ) 4-2. (4 ) 5. (7 ) 5-1.
KS 인증공장심사항목해설서 2013. 3 한국표준협회 I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 ) 4-2. (4 ) 5. (7 ) 5-1.
경상북도와시 군간인사교류활성화방안
 2010-14 경상북도와시 군간인사교류활성화방안 목 차 경상북도와시 군간인사교류활성화방안 요약,,,, 4, 5, 6,,,,, 5 58 1:1 34, 24 ( 13, 11 ) 2010 2017 8 i (5 8 ),.,, 74 (4 3, 5 19, 6 52 ) (4~6 4,901 ) 1.5% 5% ii 제 1 장 연구개요 1 연구배경과목적 2 연구범위와방법
2010-14 경상북도와시 군간인사교류활성화방안 목 차 경상북도와시 군간인사교류활성화방안 요약,,,, 4, 5, 6,,,,, 5 58 1:1 34, 24 ( 13, 11 ) 2010 2017 8 i (5 8 ),.,, 74 (4 3, 5 19, 6 52 ) (4~6 4,901 ) 1.5% 5% ii 제 1 장 연구개요 1 연구배경과목적 2 연구범위와방법
 연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
< C0DAC0B2C5BDB1B820BFEEBFB520B8DEB4BABEF32D33C2F720C6EDC1FD2E687770>
 과학영재의창의적탐구능력배양을위한 R&E 프로그램기획 운영핸드북 Handbook of Annual Planning and Implementing R&E Program for the Talented 2017 과학영재창의연구 (R&E) 지원센터 이핸드북은과학고와과학영재학교의연간 R&E 프로그램기획 운영을효과적으로지원하기위해개발된것으로, 한국과학창의재단지정과학영재창의연구
과학영재의창의적탐구능력배양을위한 R&E 프로그램기획 운영핸드북 Handbook of Annual Planning and Implementing R&E Program for the Talented 2017 과학영재창의연구 (R&E) 지원센터 이핸드북은과학고와과학영재학교의연간 R&E 프로그램기획 운영을효과적으로지원하기위해개발된것으로, 한국과학창의재단지정과학영재창의연구
어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구
홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구") 2015-0213-025 2015년판 교통사고통계 요약 어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구축 관리 분석)하여 교통안전정책 수립
2015-0213-025 2015년판 교통사고통계 요약 어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구축 관리 분석)하여 교통안전정책 수립
자율주행자동차기술및시장동향 자율주행자동차요소기술 크게네가지영역즉 인지기술 판단기술 차량이동제어기술 기술로구분 인지기술에는레이더 주변인지기술 카메라 지구항법위성시스템등이속함 판단기술에는결정론적 확률론적방법과학습 비학습기반알고리즘과같은 인공지능기술이해당 제어기술에는엑츄에이
 3 117 자율주행자동차국내외입법비교분석과정책대안 자율주행자동차의운행과책임 신기술과제도화의역할 다양한정보통신기술의기존산업적용을위하여 기존의정태적법제도에대한유연성 이요구 산업 기술분야의법제도는기술혁신의엑셀레이터기능을함 자율주행 자동차관련분야역시신기술개발 특히정보통신분야기술 로인한기존 법제도의변화를요구 자율주행자동차분야역시신기술의적용으로기존자동차산업과관련된 기존내용의변화를요구
3 117 자율주행자동차국내외입법비교분석과정책대안 자율주행자동차의운행과책임 신기술과제도화의역할 다양한정보통신기술의기존산업적용을위하여 기존의정태적법제도에대한유연성 이요구 산업 기술분야의법제도는기술혁신의엑셀레이터기능을함 자율주행 자동차관련분야역시신기술개발 특히정보통신분야기술 로인한기존 법제도의변화를요구 자율주행자동차분야역시신기술의적용으로기존자동차산업과관련된 기존내용의변화를요구
?.? -? - * : (),, ( 15 ) ( 25 ) : - : ( ) ( ) kW. 2,000kW. 2,000kW 84, , , , : 1,
,, ( 15 ) ( 25 ) : - : ( ) ( ) kW. 2,000kW. 2,000kW 84, , , , : 1,") 기계 기구및설비설치또는변경시사업장안전성문제가걱정된다면? 제조업등유해 위험방지계획서로해결하세요! '14 9 13 10 13. ?.? -? - www.kosha.or.kr * : (),, ( 15 ) - 15 - ( 25 ) - 2 - : - : ( 2013-2 ) ( ) 10. 500kW. 2,000kW. 2,000kW 84,000 123,000 183,000
기계 기구및설비설치또는변경시사업장안전성문제가걱정된다면? 제조업등유해 위험방지계획서로해결하세요! '14 9 13 10 13. ?.? -? - www.kosha.or.kr * : (),, ( 15 ) - 15 - ( 25 ) - 2 - : - : ( 2013-2 ) ( ) 10. 500kW. 2,000kW. 2,000kW 84,000 123,000 183,000
 학자금지원을위한소득기준 산출방식개선방안연구 한국장학재단이사장귀하 본보고서를 학자금지원을위한소득기준산출방식개선방안연구 의최종 보고서로제출합니다. 2011. 9 주관연구기관 : 한국보건복지정보개발원 연구진 연구책임자 : 홍성대연구위원공동연구원 : 이대영책임연구원추병주연구원구자연위촉연구원 학자금지원을위한소득기준 산출방식개선방안연구 주관연구기관 : 한국보건복지정보개발원
학자금지원을위한소득기준 산출방식개선방안연구 한국장학재단이사장귀하 본보고서를 학자금지원을위한소득기준산출방식개선방안연구 의최종 보고서로제출합니다. 2011. 9 주관연구기관 : 한국보건복지정보개발원 연구진 연구책임자 : 홍성대연구위원공동연구원 : 이대영책임연구원추병주연구원구자연위촉연구원 학자금지원을위한소득기준 산출방식개선방안연구 주관연구기관 : 한국보건복지정보개발원
1
 제주국제자유도시개발센터 389 2.7 제주국제자유도시개 제주국제자유도시개발센터 391 1. 평가결과요약 평가부문종합경영부문 (35) 주요사업부문 (35) 경영관리부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B o 3.750 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 D + 1.500
제주국제자유도시개발센터 389 2.7 제주국제자유도시개 제주국제자유도시개발센터 391 1. 평가결과요약 평가부문종합경영부문 (35) 주요사업부문 (35) 경영관리부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B o 3.750 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 D + 1.500
본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임
 학교안전기준현황파악 ᆞ 분석및 개선방안연구 본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임 목 차 학교안전기준현황파악ㆍ분석및개선방안연구 Ⅰ. 서론 / 1 1. 3 2. 4. 4. 6 3. 8 4. 8 Ⅱ. 국내학교안전관리법규현황 / 9 1. 11 2. 34 Ⅲ. 주요국의학교안전관리법규현황 / 49 1. 51 2. 114 3.
학교안전기준현황파악 ᆞ 분석및 개선방안연구 본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임 목 차 학교안전기준현황파악ㆍ분석및개선방안연구 Ⅰ. 서론 / 1 1. 3 2. 4. 4. 6 3. 8 4. 8 Ⅱ. 국내학교안전관리법규현황 / 9 1. 11 2. 34 Ⅲ. 주요국의학교안전관리법규현황 / 49 1. 51 2. 114 3.
조사보고서 구조화금융관점에서본금융위기 분석및시사점
 조사보고서 2009-8 구조화금융관점에서본금융위기 분석및시사점 Ⅰ. 서론 Ⅱ. 구조화금융의미시적시장구조 2 조사보고서 2009-08 요약 3 Ⅲ. 서브프라임위기의현황과분석 4 조사보고서 2009-08 Ⅳ. 서브프라임위기의원인및특징 요약 5 6 조사보고서 2009-08 Ⅴ. 금융위기의파급경로 Ⅵ. 금융위기극복을위한정책대응 요약 7 8 조사보고서 2009-08
조사보고서 2009-8 구조화금융관점에서본금융위기 분석및시사점 Ⅰ. 서론 Ⅱ. 구조화금융의미시적시장구조 2 조사보고서 2009-08 요약 3 Ⅲ. 서브프라임위기의현황과분석 4 조사보고서 2009-08 Ⅳ. 서브프라임위기의원인및특징 요약 5 6 조사보고서 2009-08 Ⅴ. 금융위기의파급경로 Ⅵ. 금융위기극복을위한정책대응 요약 7 8 조사보고서 2009-08
목차 I. 개요 1 II. 제 1 차우주위험대비기본계획 주요내용 3 III. 우주위험대비 2016 년도주요실적 4 IV. 16 년도개선사항및 17 년도개선방향 12 V 년도추진목표및과제 13 VI. 추진과제별시행계획 우주위험대책본부운영
 제 1 차우주위험대비기본계획 '14~'23 2017 년도시행계획 2017. 2. 관계부처합동 목차 I. 개요 1 II. 제 1 차우주위험대비기본계획 주요내용 3 III. 우주위험대비 2016 년도주요실적 4 IV. 16 년도개선사항및 17 년도개선방향 12 V. 2017 년도추진목표및과제 13 VI. 추진과제별시행계획 14 1. 우주위험대책본부운영 14 2.
제 1 차우주위험대비기본계획 '14~'23 2017 년도시행계획 2017. 2. 관계부처합동 목차 I. 개요 1 II. 제 1 차우주위험대비기본계획 주요내용 3 III. 우주위험대비 2016 년도주요실적 4 IV. 16 년도개선사항및 17 년도개선방향 12 V. 2017 년도추진목표및과제 13 VI. 추진과제별시행계획 14 1. 우주위험대책본부운영 14 2.
보도자료 2014 년국내총 R&D 투자는 63 조 7,341 억원, 전년대비 7.48% 증가 - GDP 대비 4.29% 세계최고수준 연구개발투자강국입증 - (, ) ( ) 16. OECD (Frascati Manual) 48,381 (,, ), 20
 ( ) 16. OECD (Frascati Manual) 48,381 (,, ), 20") 보도자료 2014 년국내총 R&D 투자는 63 조 7,341 억원, 전년대비 7.48% 증가 - GDP 대비 4.29% 세계최고수준 연구개발투자강국입증 - (, ) 2014 10 30() 16. OECD(Frascati Manual) 48,381 (,, ), 2014,. * 통계법국가승인지정통계 ( 제 10501 호 ) 로서 1963 년에최초실시된이래, 매년시행하고있는전국
보도자료 2014 년국내총 R&D 투자는 63 조 7,341 억원, 전년대비 7.48% 증가 - GDP 대비 4.29% 세계최고수준 연구개발투자강국입증 - (, ) 2014 10 30() 16. OECD(Frascati Manual) 48,381 (,, ), 2014,. * 통계법국가승인지정통계 ( 제 10501 호 ) 로서 1963 년에최초실시된이래, 매년시행하고있는전국
대한주택보증 ( 주 ) 대한주택보증
 대한주택보증") 대한주택보증 ( 주 ) 335 2.6 대한주택보증 대한주택보증 ( 주 ) 337 1. 평가결과요약 평가부문 종합 경영 부문 (35) 주요 사업 부문 (35) 경영 관리 부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B + 4.500 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 B +
대한주택보증 ( 주 ) 335 2.6 대한주택보증 대한주택보증 ( 주 ) 337 1. 평가결과요약 평가부문 종합 경영 부문 (35) 주요 사업 부문 (35) 경영 관리 부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B + 4.500 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 B +
<BBE7C8B8C0FBC0C7BBE7BCD2C5EBBFACB1B820C3D6C1BEBAB8B0EDBCAD2E687770>
 국립국어원 2007-01-42 사회적의사소통연구 : 성차별적언어표현사례조사및대안마련을위한연구 국립국어원 한국여성정책연구원 제출문 국립국어원장귀하 국립국어원의국고보조금지원으로수행한 사회적의사 소통연구 : 성차별적언어표현사례조사및대안마련을위한 연구 의결과보고서를작성하여제출합니다. 한국여성정책연구원 안상수 백영주, 양애경, 강혜란, 윤정주 목 차 연구개요 선행연구의고찰
국립국어원 2007-01-42 사회적의사소통연구 : 성차별적언어표현사례조사및대안마련을위한연구 국립국어원 한국여성정책연구원 제출문 국립국어원장귀하 국립국어원의국고보조금지원으로수행한 사회적의사 소통연구 : 성차별적언어표현사례조사및대안마련을위한 연구 의결과보고서를작성하여제출합니다. 한국여성정책연구원 안상수 백영주, 양애경, 강혜란, 윤정주 목 차 연구개요 선행연구의고찰
임베디드2014(가을)
") 2014 Autumn Vol.8 www.givet.re.kr 2014 Autumn News Letter 2014 Autumn Vol.8 News Letter CONTENTS GIVET Autumn 04 05 이천십사년 가을호 뉴스레터 FOCUS_ 2014년 기업지원사업 성과 기업지원성과 1 2013 경북디지털기기부품산업 패키지역량강화사업 사업기간 : 2013년
2014 Autumn Vol.8 www.givet.re.kr 2014 Autumn News Letter 2014 Autumn Vol.8 News Letter CONTENTS GIVET Autumn 04 05 이천십사년 가을호 뉴스레터 FOCUS_ 2014년 기업지원사업 성과 기업지원성과 1 2013 경북디지털기기부품산업 패키지역량강화사업 사업기간 : 2013년
Layout 1
 대대대대대대대대 :Layout 1 2014-07-15 대대 1:40 Page 1 대학의기업연계형장기현장실습 (IPP) 프로그램확산방안연구 연구보고서 2013-04 http://hrd.koreatech.ac.kr 대학의기업연계형장기현장실습 (IPP) 프로그램확산방안연구 오창헌편저 지은이 오창헌 ( 한국기술교육대학교교수 ) 엄기용 ( 한국기술교육대학교부교수 )
대대대대대대대대 :Layout 1 2014-07-15 대대 1:40 Page 1 대학의기업연계형장기현장실습 (IPP) 프로그램확산방안연구 연구보고서 2013-04 http://hrd.koreatech.ac.kr 대학의기업연계형장기현장실습 (IPP) 프로그램확산방안연구 오창헌편저 지은이 오창헌 ( 한국기술교육대학교교수 ) 엄기용 ( 한국기술교육대학교부교수 )
<37322DC0CEB1C7BAB8C8A3BCF6BBE7C1D8C4A2C0C7B0DFC7A5B8ED5B315D2E687770>
 인권보호수사준칙개정안에 대한 국가인권위원회의 의견 국가인권위원회는 국가인권위원회법 제20조 제1항에 따른 법무부의 인권보호 수사준칙개정안에 대한 국가인권위원회의 의견 요청에 대하여 검토한 결과 국가인권위원회법 제19조 제1호에 의하여 아래와 같이 의견을 표명한다. 1. 개정안 제12조의 체포 등에 대한 신속한 통지조항에서 지체없이 라는 용어는 명확성의 원칙을
인권보호수사준칙개정안에 대한 국가인권위원회의 의견 국가인권위원회는 국가인권위원회법 제20조 제1항에 따른 법무부의 인권보호 수사준칙개정안에 대한 국가인권위원회의 의견 요청에 대하여 검토한 결과 국가인권위원회법 제19조 제1호에 의하여 아래와 같이 의견을 표명한다. 1. 개정안 제12조의 체포 등에 대한 신속한 통지조항에서 지체없이 라는 용어는 명확성의 원칙을
 클라우드컴퓨팅 주요법령해설서 2017. 11. 목차 3... 5 I... 15 II... 39 1. 공공분야... 41 2. 금융분야... 71 3. 의료분야... 81 4. 교육분야... 95 5. 신산업등기타분야... 101 III... 109 요약문 5, 15 3, 1 16~ 18 15 11 16 4, 16 7,,, 5 16 5, 16 7~10,,,
클라우드컴퓨팅 주요법령해설서 2017. 11. 목차 3... 5 I... 15 II... 39 1. 공공분야... 41 2. 금융분야... 71 3. 의료분야... 81 4. 교육분야... 95 5. 신산업등기타분야... 101 III... 109 요약문 5, 15 3, 1 16~ 18 15 11 16 4, 16 7,,, 5 16 5, 16 7~10,,,
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론
 이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
 ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
 목 차 2012-5 - 7) - 6 - - 7 - 직업교육의메카, 명품신성인양성 1 사업명 - 8 - 2 필요성및목적 - 9 - 직업교육의메카, 명품신성인양성 - 10 - - 11 - 직업교육의메카, 명품신성인양성 - 12 - - 13 - 직업교육의메카, 명품신성인양성 2-1 필요성 - 14 - 2-2 목적 3 사업내용총괄 3-1 사업개요 - 15 - 직업교육의메카,
목 차 2012-5 - 7) - 6 - - 7 - 직업교육의메카, 명품신성인양성 1 사업명 - 8 - 2 필요성및목적 - 9 - 직업교육의메카, 명품신성인양성 - 10 - - 11 - 직업교육의메카, 명품신성인양성 - 12 - - 13 - 직업교육의메카, 명품신성인양성 2-1 필요성 - 14 - 2-2 목적 3 사업내용총괄 3-1 사업개요 - 15 - 직업교육의메카,
<C0CCBCF8BFE42DB1B3C1A4BFCFB7E12DB1E8B9CCBCB12DC0DBBCBAC0DAB0CBC1F5BFCFB7E12DB8D3B8AEB8BBB3BBBACEC0DAB0CBC1F52E687770>
 사회복지용 지능로봇 기술동향 머 리 말 목 차 제1장 서 론 1 제2장 기술의 특징 3 제3장 사회복지용 지능 로봇산업의 기술 수요 전망 11 제4장 사회복지용 지능 로봇의 기술 동향 32 제5장 결론 및 정책 제언 103 참고문헌 109 표 목차 그림 목차 제1장 서 론 1. 목적 및 필요성 2. 분석내용 및 범위 제2장 기술의 특징 1. 지능형 로봇기술의
사회복지용 지능로봇 기술동향 머 리 말 목 차 제1장 서 론 1 제2장 기술의 특징 3 제3장 사회복지용 지능 로봇산업의 기술 수요 전망 11 제4장 사회복지용 지능 로봇의 기술 동향 32 제5장 결론 및 정책 제언 103 참고문헌 109 표 목차 그림 목차 제1장 서 론 1. 목적 및 필요성 2. 분석내용 및 범위 제2장 기술의 특징 1. 지능형 로봇기술의
최종보고서-2011년_태양광등_FIT_개선연구_최종.hwp
 Ⅰ Ⅱ - i - Ⅲ - ii - - iii - - iv - Ⅳ Ⅴ - v - 1 1 33 1.1 33 1.1.1. 33 1.1.2. 33 1.2 35 1.2.1. 35 1.2.2. 36 2 40 2.1 40 2.1.1. 40 2.1.2. 43 2.2 47 2.2.1. 47 2.2.2. 51 3 54 3.1 54 3.1.1. 54 3.1.2. 60 3.1.3.
Ⅰ Ⅱ - i - Ⅲ - ii - - iii - - iv - Ⅳ Ⅴ - v - 1 1 33 1.1 33 1.1.1. 33 1.1.2. 33 1.2 35 1.2.1. 35 1.2.2. 36 2 40 2.1 40 2.1.1. 40 2.1.2. 43 2.2 47 2.2.1. 47 2.2.2. 51 3 54 3.1 54 3.1.1. 54 3.1.2. 60 3.1.3.
경북자동차부품관련연구소의효율적 운영방안
 2009-046 경북자동차부품관련연구소의효율적 운영방안 차례 표차례 그림차례 요약 1. 연구배경및목적,,, IT. 3,.,.. 2. 국내 지역자동차산업현황 2007 20.3 GDP 2.5%. 9%, 12%, 13%, 07 409, 285 5, 147 2.9. 8.6%, 7.0%, 4.5%, i . ( ) ( ) ( ) 4,577 277,319 38,865,170
2009-046 경북자동차부품관련연구소의효율적 운영방안 차례 표차례 그림차례 요약 1. 연구배경및목적,,, IT. 3,.,.. 2. 국내 지역자동차산업현황 2007 20.3 GDP 2.5%. 9%, 12%, 13%, 07 409, 285 5, 147 2.9. 8.6%, 7.0%, 4.5%, i . ( ) ( ) ( ) 4,577 277,319 38,865,170
C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 개관 완성차브랜드현황 협력업체 ( 부
 Global Market Report 17-039 Global Market Report 태국자동차산업글로벌밸류체인 (GVC) 진출방안 방콕무역관 C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 13 3. 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 16 1. 개관
Global Market Report 17-039 Global Market Report 태국자동차산업글로벌밸류체인 (GVC) 진출방안 방콕무역관 C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 13 3. 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 16 1. 개관
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
( 1 ) ( 2 )
 ( 2 )") 보건의료기술육성기본계획 ( 13 17) 2016 년시행계획 ( 안 ) ( 1 ) ( 2 ) 0 비전중장기 5대추진전략 국민건강 G7 선진국도약 - 2020 건강수명 75 세시대 달성 - 건강 R&D 투자지속적확대 글로벌수준의기술개발을위한선택과집중 성과창출형 R&D 지원시스템고도화 연구생태계조성 건강산업촉진을위한제도개선 건강 R&D 투자지속적확대 보건의료 R&D
보건의료기술육성기본계획 ( 13 17) 2016 년시행계획 ( 안 ) ( 1 ) ( 2 ) 0 비전중장기 5대추진전략 국민건강 G7 선진국도약 - 2020 건강수명 75 세시대 달성 - 건강 R&D 투자지속적확대 글로벌수준의기술개발을위한선택과집중 성과창출형 R&D 지원시스템고도화 연구생태계조성 건강산업촉진을위한제도개선 건강 R&D 투자지속적확대 보건의료 R&D
제29권 11호 통권 648호.hwp
 자율주행자동차의기기전자인증체계도입을위한법 제도개선방안제 29 권 11호통권 648호 자율주행자동차의기기전자인증체계도입을위한법 제도개선방안 정민호 * 1) 자율주행자동차시대는머지않은시기에도래할것이다. 자율주행자동차시대를대비하기위한관련법제도의개선방안연구는시험운행을위한영역, 상용화를위한영역, 협력적지능형교통체계를위한기기전자인증영역으로나눌수있다. 이러한세가지영역중시험운행을위한법령개정논의는이미해외나우리나라모두입법을통해해결되었으며,
자율주행자동차의기기전자인증체계도입을위한법 제도개선방안제 29 권 11호통권 648호 자율주행자동차의기기전자인증체계도입을위한법 제도개선방안 정민호 * 1) 자율주행자동차시대는머지않은시기에도래할것이다. 자율주행자동차시대를대비하기위한관련법제도의개선방안연구는시험운행을위한영역, 상용화를위한영역, 협력적지능형교통체계를위한기기전자인증영역으로나눌수있다. 이러한세가지영역중시험운행을위한법령개정논의는이미해외나우리나라모두입법을통해해결되었으며,
1-표지 및 목차 & 1-서론 (최종보고서안).hwp
.hwp") 목차 표목차 그림목차 1 제 1 장서론 하수도시설내진기준마련을위한연구 1.1 1.2 1.3 제 1 장서론 하수도시설내진기준마련을위한연구 2 제 2 장 국내외주요지진발생현황 및피해사례조사 분석 하수도시설내진기준마련을위한연주 2.1 서론 2.2 국내지진발생현황및발생빈도 2.3 국외주요지진과하수도시설피해상황 제 2 장국내외주요지진발생현황및피해사례조사
목차 표목차 그림목차 1 제 1 장서론 하수도시설내진기준마련을위한연구 1.1 1.2 1.3 제 1 장서론 하수도시설내진기준마련을위한연구 2 제 2 장 국내외주요지진발생현황 및피해사례조사 분석 하수도시설내진기준마련을위한연주 2.1 서론 2.2 국내지진발생현황및발생빈도 2.3 국외주요지진과하수도시설피해상황 제 2 장국내외주요지진발생현황및피해사례조사
자산관리서비스선진화방안(인쇄).hwp
.hwp") 경영보고서 2009-2 자산관리서비스활성화방안 보험연구원 Ⅰ. 서론 2 경영보고서 2009-02 Ⅱ. 자산관리서비스에대한논리적검토 요약 3 4 경영보고서 2009-02 Ⅲ. 국내외자산관리서비스현황 요약 5 운용전략 운용전략 자산관리서비스유형 유가증권 뮤추얼펀드 상장지수펀드 운용전략 1 운용전략 2 SMA MDA MDA 6 경영보고서 2009-02
경영보고서 2009-2 자산관리서비스활성화방안 보험연구원 Ⅰ. 서론 2 경영보고서 2009-02 Ⅱ. 자산관리서비스에대한논리적검토 요약 3 4 경영보고서 2009-02 Ⅲ. 국내외자산관리서비스현황 요약 5 운용전략 운용전략 자산관리서비스유형 유가증권 뮤추얼펀드 상장지수펀드 운용전략 1 운용전략 2 SMA MDA MDA 6 경영보고서 2009-02
Slide 1
 Java 기반의오픈소스 GIS(GeoServer, udig) 를지원하는국내공간 DBMS 드라이버의개발 2013. 08. 28. 김기웅 (socoooooool@gmail.com) 임영현 (yhlim0129@gmail.com) 이민파 (mapplus@gmail.com) PAGE 1 1 기술개발의목표및내용 2 기술개발현황 3 커뮤니티운영계획 4 활용방법및시연 PAGE
Java 기반의오픈소스 GIS(GeoServer, udig) 를지원하는국내공간 DBMS 드라이버의개발 2013. 08. 28. 김기웅 (socoooooool@gmail.com) 임영현 (yhlim0129@gmail.com) 이민파 (mapplus@gmail.com) PAGE 1 1 기술개발의목표및내용 2 기술개발현황 3 커뮤니티운영계획 4 활용방법및시연 PAGE
여수신북항(1227)-출판보고서-100부.hwp
-출판보고서-100부.hwp") 2012 년도타당성재조사보고서 여수신북항건설사업 2012. 10 요약 요약 1. 사업의개요 가. 추진배경및목적 2012( 1), 2) ) 164 11. -.,,. (2008.10.23, ) 3). 1),,,,,,,. 2),,,,. 3) 2013 7 2012(, ) 11, ( A,B,C,W ).. 나. 사업내용및추진경위 : : : 1,103m, 1,270m,
2012 년도타당성재조사보고서 여수신북항건설사업 2012. 10 요약 요약 1. 사업의개요 가. 추진배경및목적 2012( 1), 2) ) 164 11. -.,,. (2008.10.23, ) 3). 1),,,,,,,. 2),,,,. 3) 2013 7 2012(, ) 11, ( A,B,C,W ).. 나. 사업내용및추진경위 : : : 1,103m, 1,270m,
2018년 10월 12일식품의약품안전처장
 2018년 10월 12일식품의약품안전처장 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - - 18 - - 19 - - 20 - - 21 - - 22 - - 23 - - 24 - - 25 - - 26 - - 27
2018년 10월 12일식품의약품안전처장 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - - 18 - - 19 - - 20 - - 21 - - 22 - - 23 - - 24 - - 25 - - 26 - - 27
외국인투자유치성과평가기준개발
 2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
ad-200200004.hwp
 탈성매매를 위한 사회복귀지원 프로그램 연구 여 성 부 목 차 Ⅰ. 서론 Ⅱ. 이론적 배경 및 선행연구결과 정리 Ⅲ. 여성복지상담소 실태조사 결과 Ⅳ. 선도보호시설의 운영 및 프로그램 현황 조사 결과 Ⅴ. 결론 참고문헌 부 록 표 목 차 그 림 목 차 부 표 목 차 Ⅰ. 서 론 . 서론 1. 연구의 목적 및 필요성 탈성매매를 위한 사회복귀지원 프로그램 연구
탈성매매를 위한 사회복귀지원 프로그램 연구 여 성 부 목 차 Ⅰ. 서론 Ⅱ. 이론적 배경 및 선행연구결과 정리 Ⅲ. 여성복지상담소 실태조사 결과 Ⅳ. 선도보호시설의 운영 및 프로그램 현황 조사 결과 Ⅴ. 결론 참고문헌 부 록 표 목 차 그 림 목 차 부 표 목 차 Ⅰ. 서 론 . 서론 1. 연구의 목적 및 필요성 탈성매매를 위한 사회복귀지원 프로그램 연구
 NCS 기반일학습병행대학표준모델개발 책을펴내며 목차 표목차 그림목차 요약 i ii NCS 기반일학습병행대학표준모델개발 요약 iii iv NCS 기반일학습병행대학표준모델개발 요약 v vi NCS 기반일학습병행대학표준모델개발 요약 vii viii NCS 기반일학습병행대학표준모델개발 요약 ix x NCS 기반일학습병행대학표준모델개발 제 1 장서론
NCS 기반일학습병행대학표준모델개발 책을펴내며 목차 표목차 그림목차 요약 i ii NCS 기반일학습병행대학표준모델개발 요약 iii iv NCS 기반일학습병행대학표준모델개발 요약 v vi NCS 기반일학습병행대학표준모델개발 요약 vii viii NCS 기반일학습병행대학표준모델개발 요약 ix x NCS 기반일학습병행대학표준모델개발 제 1 장서론
안전확인대상생활화학제품지정및안전 표시기준 제1조 ( 목적 ) 제2조 ( 정의 )
 제2조 ( 정의 )") 안전확인대상생활화학제품지정및안전 표시기준 제1조 ( 목적 ) 제2조 ( 정의 ) - 1 - - 2 - 제3조 ( 안전확인대상생활화학제품지정 ) 제4조 ( 안전기준의설정 ) 제5조 ( 안전기준 ) 제6조 ( 표시기준 ) - 3 - - 4 - 제9조 ( 규제의재검토 ) 제 7 조 ( 안전기준확인제출자료 ) 제8조 ( 안전기준적용예외 ) 부칙 제1조 ( 시행일 )
안전확인대상생활화학제품지정및안전 표시기준 제1조 ( 목적 ) 제2조 ( 정의 ) - 1 - - 2 - 제3조 ( 안전확인대상생활화학제품지정 ) 제4조 ( 안전기준의설정 ) 제5조 ( 안전기준 ) 제6조 ( 표시기준 ) - 3 - - 4 - 제9조 ( 규제의재검토 ) 제 7 조 ( 안전기준확인제출자료 ) 제8조 ( 안전기준적용예외 ) 부칙 제1조 ( 시행일 )
담당부서 보도자료 배포일시 화 총 매 본문 참고 과장정의경 서기관이창기 주무관최문갑첨단자동차기술과담당자 보도일시 2016 년 8 월 10 일 ( 수 ) 조간부터보도하여주시기바랍니다. 통신 방송 인터넷은 8. 9( 화 ) 11:00 이후보도가능 자율주행실험도시 (K-Ci
 조간부터보도하여주시기바랍니다. 통신 방송 인터넷은 8. 9( 화 ) 11:00 이후보도가능 자율주행실험도시 (K-Ci") 담당부서 보도자료 배포일시 화 총 매 본문 참고 과장정의경 서기관이창기 주무관최문갑첨단자동차기술과담당자 보도일시 2016 년 8 월 10 일 ( 수 ) 조간부터보도하여주시기바랍니다. 통신 방송 인터넷은 8. 9( 화 ) 11:00 이후보도가능 자율주행실험도시 (K-City) 구축의첫삽을뜨다 - 국토교통부 K-City 착수보고회가져 - 국토교통부 장관강호인 는
담당부서 보도자료 배포일시 화 총 매 본문 참고 과장정의경 서기관이창기 주무관최문갑첨단자동차기술과담당자 보도일시 2016 년 8 월 10 일 ( 수 ) 조간부터보도하여주시기바랍니다. 통신 방송 인터넷은 8. 9( 화 ) 11:00 이후보도가능 자율주행실험도시 (K-City) 구축의첫삽을뜨다 - 국토교통부 K-City 착수보고회가져 - 국토교통부 장관강호인 는
 2.2 한국마사회 한국마사회 95 한국마사회 97 1. 평가결과요약 평가부문 종합경영부문 (35) 주요사업부문 (35) 경영관리부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B o 3.750 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 C o 2.000 (3) 경영혁신노력과성과 9등급평가
2.2 한국마사회 한국마사회 95 한국마사회 97 1. 평가결과요약 평가부문 종합경영부문 (35) 주요사업부문 (35) 경영관리부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B o 3.750 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 C o 2.000 (3) 경영혁신노력과성과 9등급평가
 신청서작성 신청접수 신청서보완 신청서검토 신청제품공지및의견서접수 생산실태조사협조 생산실태조사 생산실태조사 지정심사참석 지정심사 지정심사 ( 물품및법인평가 ) 지정심사는분야별 5~10 인의 외부심사위원으로구성 지정심사결과확인 지정심사결과보고 최종심사 조달청계약심사협의회 지정결과확인 우수조달공동상표물품지정 지정증서 ( 별도발송 및직접수령 ) 지정증서수여 지정관리심사
신청서작성 신청접수 신청서보완 신청서검토 신청제품공지및의견서접수 생산실태조사협조 생산실태조사 생산실태조사 지정심사참석 지정심사 지정심사 ( 물품및법인평가 ) 지정심사는분야별 5~10 인의 외부심사위원으로구성 지정심사결과확인 지정심사결과보고 최종심사 조달청계약심사협의회 지정결과확인 우수조달공동상표물품지정 지정증서 ( 별도발송 및직접수령 ) 지정증서수여 지정관리심사
2002report hwp
 2002 연구보고서 220-11 초 중등교육과정의성인지적개편을위한양성평등교육내용개발 한국여성개발원 발간사 양성평등교육내용개발진 연구요약 1. 연구목적 2. 연구방법 3. 7 차교육과정및교과서내용분석 가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 4. 각교과별양성평등교육내용개발가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 5. 결론 목 차 Ⅰ 서론
2002 연구보고서 220-11 초 중등교육과정의성인지적개편을위한양성평등교육내용개발 한국여성개발원 발간사 양성평등교육내용개발진 연구요약 1. 연구목적 2. 연구방법 3. 7 차교육과정및교과서내용분석 가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 4. 각교과별양성평등교육내용개발가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 5. 결론 목 차 Ⅰ 서론
- i -
 KOFST 2014 과학기술퇴직인력의사회참여역량확대사업 - i - 사업과제명 ( 한글 ) ( 영어 ) A project for promotion of engagement of the retired science and technology professionals in social activities 사업수행기관 사업책임자 성명직위전공 원장 총사업기간 2014
KOFST 2014 과학기술퇴직인력의사회참여역량확대사업 - i - 사업과제명 ( 한글 ) ( 영어 ) A project for promotion of engagement of the retired science and technology professionals in social activities 사업수행기관 사업책임자 성명직위전공 원장 총사업기간 2014
2 Journal of Disaster Prevention
 VOL.13 No.4 2011 08 JOURNAL OF DISASTER PREVENTION CONTENTS XXXXXX XXXXXX 2 Journal of Disaster Prevention 3 XXXXXXXXXXXXXXX XXXXXXXXXXXXXX 4 Journal of Disaster Prevention 5 6 Journal of Disaster Prevention
VOL.13 No.4 2011 08 JOURNAL OF DISASTER PREVENTION CONTENTS XXXXXX XXXXXX 2 Journal of Disaster Prevention 3 XXXXXXXXXXXXXXX XXXXXXXXXXXXXX 4 Journal of Disaster Prevention 5 6 Journal of Disaster Prevention
1
 2014 년도기술수준평가결과 ( 안 ) - 120 개국가전략기술 - ( 1 ) 2014 가. 10대기술분야 ( 2 ) 나. 120개국가전략기술분야 ( 3 ) 다. 미래성장동력산업 (13 개 ) 분야 4. ( 4 ) 2014 년도기술수준평가결과 ( 안 ) -120 개국가전략기술 - 목차 1. 평가개요 1 2. 평가단계별추진절차 2 3. 평가결과 3 4. 국가전략기술로본미래성장동력산업별기술수준
2014 년도기술수준평가결과 ( 안 ) - 120 개국가전략기술 - ( 1 ) 2014 가. 10대기술분야 ( 2 ) 나. 120개국가전략기술분야 ( 3 ) 다. 미래성장동력산업 (13 개 ) 분야 4. ( 4 ) 2014 년도기술수준평가결과 ( 안 ) -120 개국가전략기술 - 목차 1. 평가개요 1 2. 평가단계별추진절차 2 3. 평가결과 3 4. 국가전략기술로본미래성장동력산업별기술수준
m (-6933, `12.5.2) ( ),,,,.,. 2 2 ( ) 1 2 (( 高 ) M10 110) 2,280, H, H.. - (, ) H, H, H. - ( 引拔 ), H,. (-6933, `12.5.2) ( ),. 3 (2,280), (, ) ( 共
 ( ),,,,.,. 2 2 ( ) 1 2 (( 高 ) M10 110) 2,280, H, H.. - (, ) H, H, H. - ( 引拔 ), H,. (-6933, `12.5.2) ( ),. 3 (2,280), (, ) ( 共") 연번주요지적사항처분요구조치현황 감사결과처분요구및조치현황 No. 1 m () ( : ) 3 [(1),, ], 2. 3 2013 6~12 11( 2.7), 399KW. - 2 - m (-6933, `12.5.2) (2014-56),,,,.,. 2 2 ( ) 1 2 (( 高 ) M10 110) 2,280, H, H.. - (, ) H, H, H. - ( 引拔 ),
연번주요지적사항처분요구조치현황 감사결과처분요구및조치현황 No. 1 m () ( : ) 3 [(1),, ], 2. 3 2013 6~12 11( 2.7), 399KW. - 2 - m (-6933, `12.5.2) (2014-56),,,,.,. 2 2 ( ) 1 2 (( 高 ) M10 110) 2,280, H, H.. - (, ) H, H, H. - ( 引拔 ),
보험판매와 고객보호의 원칙
 ..... 61),,,, IT,.,. 2020-2040. IT...... 1 10.. (No Fault). (No Fault). (No Fault). * /. (2016.12.08), (2016.12.24), (2016.12.26) - 243 - 10 2 (2016).... 1),,.,,,.,. 2) (National Highway Traffic Safety
..... 61),,,, IT,.,. 2020-2040. IT...... 1 10.. (No Fault). (No Fault). (No Fault). * /. (2016.12.08), (2016.12.24), (2016.12.26) - 243 - 10 2 (2016).... 1),,.,,,.,. 2) (National Highway Traffic Safety
사용자중심의강력한렌터카관리솔루션 렌트업 RENTUP 서비스사용매뉴얼
 렌트업 RENTUP 서비스사용매뉴얼 I. 기본기능. 메뉴구성. 서비스이용흐름도 3. 시스템접속및로그인 4. 차량대여스케줄및기타현황확인 5. 지점운영현황확인 6. 유비칸차량관제연동 I. 기본기능. 메뉴구성 예약관리 대여관리 차량관리 정산관리 고객. 업체관리 관리자 예약가능차량 실시간대여현황 차량현황 입출금현황 고객관리 사업장관리 예약현황 대여가능차량 차량정보관리
렌트업 RENTUP 서비스사용매뉴얼 I. 기본기능. 메뉴구성. 서비스이용흐름도 3. 시스템접속및로그인 4. 차량대여스케줄및기타현황확인 5. 지점운영현황확인 6. 유비칸차량관제연동 I. 기본기능. 메뉴구성 예약관리 대여관리 차량관리 정산관리 고객. 업체관리 관리자 예약가능차량 실시간대여현황 차량현황 입출금현황 고객관리 사업장관리 예약현황 대여가능차량 차량정보관리
국가건설기준 설계기준 Korean Design Standard KDS : 2016 쌓기 깎기설계기준 2016 년 6 월 30 일제정
 국가건설기준 설계기준 Korean Design Standard KDS 11 70 05 : 2016 쌓기 깎기설계기준 2016 년 6 월 30 일제정 http://www.kcsc.re.kr 건설기준제 개정에따른경과조치 이기준은발간시점부터사용하며, 이미시행중에있는설계용역이나건설공 사는발주기관의장이필요하다고인정하는경우종전에적용하고있는기준 을그대로사용할수있습니다.
국가건설기준 설계기준 Korean Design Standard KDS 11 70 05 : 2016 쌓기 깎기설계기준 2016 년 6 월 30 일제정 http://www.kcsc.re.kr 건설기준제 개정에따른경과조치 이기준은발간시점부터사용하며, 이미시행중에있는설계용역이나건설공 사는발주기관의장이필요하다고인정하는경우종전에적용하고있는기준 을그대로사용할수있습니다.
<BBEAC0E7BAB8C7E8C1A6B5B52E687770>
 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
농업기반정비사업 계획설계기준 개편
 발간등록번호 11-1543000-000714-01 http://rri.ekr.or.kr Reforms of Code Structure for the Agricultural Infrastructure Design Standards (Ⅰ) - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - -
발간등록번호 11-1543000-000714-01 http://rri.ekr.or.kr Reforms of Code Structure for the Agricultural Infrastructure Design Standards (Ⅰ) - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - -
정보연계기관 GPS정보 GPS좌표 및 시간 정보 수신 CDMA망 무선인터넷망 (Wi-Fi) 이동통신망 정보 송수신 서비스센터 통합 소방서 요청 위급상황 발생 GPS좌표값, 시간정보 송신 상황별 대응 요청 경찰서 정보수집 정보분석 서비스 사용자 정보가공 정보 송수신 보험
 이동통신망 정보 송수신 서비스센터 통합 소방서 요청 위급상황 발생 GPS좌표값, 시간정보 송신 상황별 대응 요청 경찰서 정보수집 정보분석 서비스 사용자 정보가공 정보 송수신 보험") 표준 시험인증 기술 동향 차량 ICT 기반 긴급구난체계 (e-call) 서비스 및 기술 동향 양상운 TTA 이동통신시험인증단 선임연구원 1) 2012년 기준 인구10만 명당 교통사고 사망자 수 OECD국가중 33위, 자동차 1만 대당 교통사고 사망자 수 32위, 인구 10만 명당 교통사고 사망자 수 연평균 감소율 2.81%로 OECD 평균보다 낮음 등 TTA
표준 시험인증 기술 동향 차량 ICT 기반 긴급구난체계 (e-call) 서비스 및 기술 동향 양상운 TTA 이동통신시험인증단 선임연구원 1) 2012년 기준 인구10만 명당 교통사고 사망자 수 OECD국가중 33위, 자동차 1만 대당 교통사고 사망자 수 32위, 인구 10만 명당 교통사고 사망자 수 연평균 감소율 2.81%로 OECD 평균보다 낮음 등 TTA
 2012-82 The Study on the Alternative Plans for Conservation and Effective Use in Palgong-Mountain , i ii iii iv v ? vi vii 제 절연구배경및목적 연구배경과필요성 연구목적 제 절연구범위 연구내용및방법 연구범위 연구내용 연구방법 제 절선행연구고찰 주요개념 관련연구
2012-82 The Study on the Alternative Plans for Conservation and Effective Use in Palgong-Mountain , i ii iii iv v ? vi vii 제 절연구배경및목적 연구배경과필요성 연구목적 제 절연구범위 연구내용및방법 연구범위 연구내용 연구방법 제 절선행연구고찰 주요개념 관련연구
354-437-4..
 357 358 4.3% 5.1% 8.2% 6.2% 5.6% 6% 5% 5.3% 96.1% 85.2% 39.6% 50.8% 82.7% 86.7% 28.2% 8.0% 60.0% 60.4% 18,287 16,601 (%) 100 90 80 70 60 50 40 86.6% 80.0% 77.8% 57.6% 89.7% 78.4% 82.1% 59.0% 91.7% 91.4%
357 358 4.3% 5.1% 8.2% 6.2% 5.6% 6% 5% 5.3% 96.1% 85.2% 39.6% 50.8% 82.7% 86.7% 28.2% 8.0% 60.0% 60.4% 18,287 16,601 (%) 100 90 80 70 60 50 40 86.6% 80.0% 77.8% 57.6% 89.7% 78.4% 82.1% 59.0% 91.7% 91.4%
목차 Ⅰ. 기본현황 Ⅱ 년도성과평가및시사점 Ⅲ 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬
 증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종
 2 0 1 4 년 4 / 4 분기 2014. 9 목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ. 2014 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종별전망 7 5. 규모및유형별전망 8 6. 정부경기부양정책발표에따른영향
2 0 1 4 년 4 / 4 분기 2014. 9 목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ. 2014 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종별전망 7 5. 규모및유형별전망 8 6. 정부경기부양정책발표에따른영향
참고 1 실시간관측부이설치위치및관측항목 참고 2 해운대이안류발생감시및상황전파
 보 도 자 료 10. 21 (금) 배포 일시 총 2011. 10매(본문 2, 붙임 8) 과 장 김옥수, 사무관 임채호, 주무관 이호정 국립해양조사원 담당 해양관측과ㆍ 담 당 자 실 장 이은일, 연구사 권석재 부서 해양과학조사연구실 (032)880-0460 hojeong@korea.kr 보 도 일 시 2011년 10월 24일(월) 석간부터 보도하여 주시기 바랍니다.
보 도 자 료 10. 21 (금) 배포 일시 총 2011. 10매(본문 2, 붙임 8) 과 장 김옥수, 사무관 임채호, 주무관 이호정 국립해양조사원 담당 해양관측과ㆍ 담 당 자 실 장 이은일, 연구사 권석재 부서 해양과학조사연구실 (032)880-0460 hojeong@korea.kr 보 도 일 시 2011년 10월 24일(월) 석간부터 보도하여 주시기 바랍니다.
슬라이드 1
 IT R&D Global Leader 자율협력주행을위한 V2X 통신기술 Krnet2017 미래자율주행자동차세션 2 목차 1 협력주행기술개념 2 협력주행서비스 3 V2X 통신기술표준 4 V2X 통신기술개발 3 1 협력주행기술개념 4 협력주행기술개념 자율주행기술 : 센서를이용한자율주행 협력자율주행기술 : 통신인프라와연계한자율주행 Google s Autonomous
IT R&D Global Leader 자율협력주행을위한 V2X 통신기술 Krnet2017 미래자율주행자동차세션 2 목차 1 협력주행기술개념 2 협력주행서비스 3 V2X 통신기술표준 4 V2X 통신기술개발 3 1 협력주행기술개념 4 협력주행기술개념 자율주행기술 : 센서를이용한자율주행 협력자율주행기술 : 통신인프라와연계한자율주행 Google s Autonomous
[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp
![[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp](/thumbs/91/104626366.jpg "[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp") 2010 년도예비타당성조사보고서 광주도시철도 2 호선건설사업 공공투자관리센터 한국개발연구원 요 약 요약 Ⅰ. 예비타당성조사의개요 1. 사업의배경및목적,,. 2 2002 2005, 2010. 2015 2. 1 1 2015 2 2. 사업추진경위 2002, 2005 (B/C=1.42, AHP=0.606), ( )., 5, 2 ( () ). - (2010.2).
2010 년도예비타당성조사보고서 광주도시철도 2 호선건설사업 공공투자관리센터 한국개발연구원 요 약 요약 Ⅰ. 예비타당성조사의개요 1. 사업의배경및목적,,. 2 2002 2005, 2010. 2015 2. 1 1 2015 2 2. 사업추진경위 2002, 2005 (B/C=1.42, AHP=0.606), ( )., 5, 2 ( () ). - (2010.2).
5월전체 :7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26
 5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로