개요 본작품의목적은 MCU 를처음접하는사용자가정해진커리큘럼에맞추어학습할수있는키트를만드는것이다. 사용자는본작품을통해저성능이지만사용및학습이쉽고현재가장많이사용되는 MCU 인 AVR 과현존하는가장고성능 MCU 인 C2000 프로세서를사용해봄으로서 MCU 를사용하는로봇엔지니어로
|
|
|
- 준엽 우
- 7 years ago
- Views:
Transcription
1 Texas Instruments innovation challenge Korean MCU design contest 2013 최종리포트 TMDX28069USB 를이용한 2 종 MCU 학습키트
2 개요 본작품의목적은 MCU 를처음접하는사용자가정해진커리큘럼에맞추어학습할수있는키트를만드는것이다. 사용자는본작품을통해저성능이지만사용및학습이쉽고현재가장많이사용되는 MCU 인 AVR 과현존하는가장고성능 MCU 인 C2000 프로세서를사용해봄으로서 MCU 를사용하는로봇엔지니어로서의기초소양을갖추게된다. 키트의구성요건은첫째, 보급가능하도록저가여야하며둘째, 로봇엔지니어를위한키트인만큼하드웨어와의연동이가능해야한다. 이를위해하드웨어는점퍼스위치를통한 AVR 과 C2000 간의하드웨어호환이되어야하며, 모터제어가가능한회로와구조를포함하고 PC 와의연동이가능해야한다. 또한소프트웨어는기초학습을위해제공되는기본코드와이를응용하여학습자가스스로작성가능한응용코드로구성되어야한다. 이키트는테스트를거쳐현재직접작성한교재와함께충남대메카트로닉스공학과에서 2013 년 2 학기부터마이크로프로세서실험과목에정식도입되었다. 본문 - 목적본작품은대학이나공업고등학교, 직업학교등에서로봇을학습하는곳에서처음 MCU 를접하는사용자가기초적인범용 MCU 에서고성능 MCU 까지두루체험할수있게도와주는것을목적으로하고있다. 이를통해사용자는자신이사용해본 MCU 를현장에나가응용하는데유리해질것이다. 이러한목적의달성을위해본작품은다음과같은 2 가지조건을만족해야한다. 개인구매나교육기관구매가용이하도록키트와그개발장비까지의구성요소들의가격이저렴해야한다. 로봇공학과관련된학습이목표이기때문에제어공학의학습이가능하도록모터와그제어회로, 그리고 PC 와의연동이가능해야한다. 하드웨어는 2 종의 MCU 가하나의하드웨어를점퍼스위치등을통해공유하게하고, 에뮬레이터가포함된 C2000 키트를응용하여단가를절감하였고, PCB 제작등을통해생산및보급이용이하게하였다. 소프트웨어는학습의용이성과효율성을위해기초학습을위한기본코드와응용학습을위한응용코드를제작하였다.

3 - 하드웨어 하드웨어선정 하드웨어구성을위한각종부품선정에있어서주안점은단가가저렴해야한다는것이다. 여기서말하는단가는개발환경까지포함하는포괄적개념으로해당 MCU 를가지고개발할때예상되는총비용이다. 이런점을고려하여선정된모델이 TMDX28069USB 다. <TMDX28069USB> TMDX28069 는 Piccolo 계열의 TMX320F28069 를탑재한학습용 ControlStick 이다. 이모델은 XDS100 계열의저가형에뮬레이터가내장되어있기때문에 CCS 역시무료로사용가능하다. 단가는 $39 로이를구매하면 DSP Core MCU 의개발환경구성에별도의추가비용이발생하지않는다. 또한대학지원프로그램의일환으로일부대학에무료로지원되고있다는점도장점이다. 저성능기초학습용 MCU 는 AVR 이선정되었다. MSP430 도좋은대안이될수있지만시장보급률과한글참조자료의양으로판단하였을때초급자의교육용으로가장알맞다. 또한대부분의대학교과목에서 AVR 을활용한수업이아직도많다는점이선정이유로작용하였다. 모터제어회로부분에는보급률이높고 H- 브릿지가내장되어있으며단가또한여타일체형모터드라이버보다저렴한 L298 이선정되었다. 모터는국내산저가형을선정하였으며, 이외에 PC 연동을위한 RS-232 회로, 보호를위한 3-State Buffer, 써지회로, 스위칭레귤레이터회로, LED, 스위치등이추가되었다.

4 회로설계 회로설계에서의주안점은첫째, 모터동작에의한노이즈및역기전력으로인해 MCU 가파손되지않도록보호할것, 둘째 LED, 스위치, 모터구동부등 2 종의 MCU 가모두사용하는회로의경우점퍼스위치를통해한종의 MCU 를임의로정해서동작가능하도록할것이다. 모터노이즈및역기전력방지를위해다이오드를이용한써지회로와 3-State Buffer 를탑재하였다. 역방향바이어스로배치된 4 개의다이오드는모터의회전에의한역기전력발생시이를 MCU 로흘러가지않게전원으로빼주는역할을한다. 모터드라이버입력신호선에 MCU 와모터드라이버회로사이에배치한 3-State Buffer 는혹시모를회로상의타격이 MCU 에영향을미치지않게해주며, 특히 3.3V 시스템인 의신호가성공적으로 5V 시스템인 L298 이나전류소모가많을수있는 LED 로전달되도록도와준다. 또한모터와드라이버가연결된 Analog GND 와 MCU 등이연결된 Digital GND 를비드를통해분리시켰다. 추가로 MCU 간의통신실습을위해 AVR 과 간에 SCI 통신선을연결하였다. QEP 핀이외부로노출되어있지않은 TMDX28069USB 의특성으로인해 가자체적으로모터제어를위한엔코더값을받아들이는것이불가능하다. 따라서엔코더카운팅을 AVR 이해서 에 SCI 통신으로값을넘기게되었다. <Kit 회로도 >

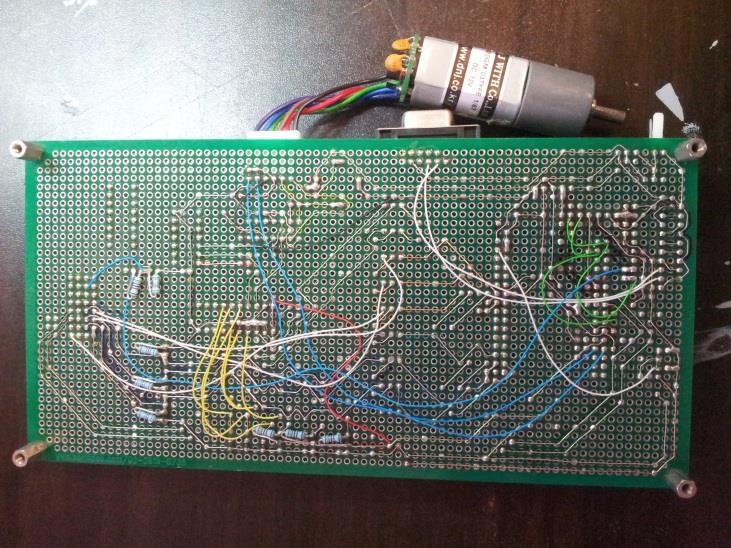
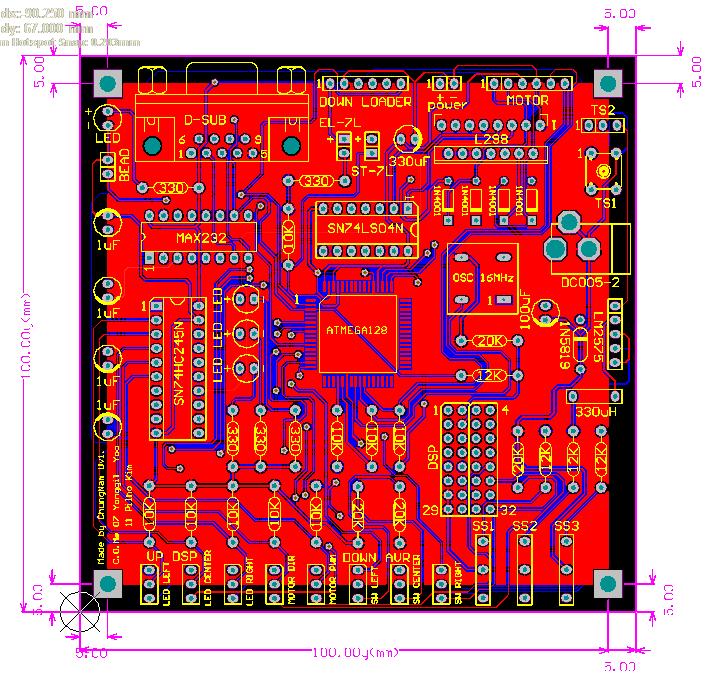
5 PCB 설계 양산을위해 PCB 를설계할필요가있다. PCB 설계전회로동작검토를위해테스트보드를제작하여테스트하였다. < 테스트보드 > 이를바탕으로확정된회로를 PCB 설계로옮겨작업하였다. <PCB 설계 > PCB 설계에는현재현역군인이기때문에대회참가가불가능했던김필호군이참여하였다.

6 키트최종구성모터고정과키트의회로보호를위한아크릴판제작및서포트를이용한조립이완료되었다. < 최종키트구성 > 하나의키트에는제작된본 Kit 와 AVR 용다운로더, 232-USB 컨버터, TMDX28069USB, 박스등이포함되어있다.
7 - 소프트웨어 커리큘럼프로그램선정 실습용프로그램선정에있어서주안점은기본적인기능과자주사용하는기능의사용이다. 커리큘럼은 1 주 1 회실험에총 10 주로구성되며, 이중 를이용한실습은 5 주로계획되었다. 총 5 회의실험은다음과같이구성되었다. 주차내용 1 주차 CCS 사용법 2 주차 GPIO 실습 3 주차 epwm 실습 4 주차 SCI 실습 5 주차모터제어모든실습의최종목표는모터제어다. 따라서모터의정역전환제어를위한 GPIO Control 실습, 속도제어를위한 epwm 실습이포함되어있다. 모터위치및속도 FeedBack 은엔코더를통해하게되는데 TMDX28069USB 에는엔코더카운팅전용주변장치인 QEP 가외부로노출되어있지않다. 따라서 SCI 실습에서 AVR 과의통신을학습하고이를이용하여 AVR 에서카운팅한엔코더값을 에서 SCI 를통해받아제어하는방식으로되어있다. 추가로기본적인개발환경에대한이해를돕기위해 CCS 의다운로드, 설치방법및실시간디버깅을이용한기본적인 사용법에대해첫주차에실습하게된다. CCS 사용법 는단순히삼각함수연산만실행하고이를배열에저장하는작업만한다. 사용자는 CCS 의실시간디버깅기능을이용하여그래프로그려본다. 이를통해사용자는프로젝트열기, DSP 연결, 실시간디버깅등 CCS 의기본적인사용법을학습한다. 응용실습은시간도메인이아닌주파수도메인으로그래프를그려보도록한다. #include "DSP28x_Project.h" #include "math.h" float graph[100]; unsigned int index = 0; void main(void) InitSysCtrl(); DINT; InitPieCtrl(); IER = 0x0000; IFR = 0x0000; InitPieVectTable(); EINT; ERTM;
8 for(;;) graph[index] = (float)sin((double)index / 10); index ++; if(index > 99) index = 0; DSP28x_usDelay(1000); <CCS 사용법기본실험코드 > GPIO 실습 스위치와 LED 를 GPIO 로입출력하여시각적으로볼수있게학습한다. 이실습은 2 가지실험으로구성되어있다. 첫번째기본실험은스위치입력을통해 LED 를제어한다. 사용자는이를통해기본적인 GPIO 사용법을익힐수있다. 이때스위치입력시채터링방지를위하여강제적인프로그램딜레이를사용한다. Input Qualifier 를사용하는방법도있지만키트의목적이어디까지나기본적인기능의습득을목표로하고있기때문에각주변장치에있는부가적인기능은이후로도많은부분생략하였다. 두번째기본실험에서는 CpuTimer Interrupt 를사용하여 LED 의깜빡임을제어한다. 이를통해사용자는 TI MCU 의기본적인 Interrupt 설정및사용법을학습할수있다. 응용실험은이둘을합쳐실습해본다. #include "DSP28x_Project.h" #define LEFT_SW_ON (!GpioDataRegs.GPADAT.bit.GPIO16) #define RIGHT_SW_ON (!GpioDataRegs.GPADAT.bit.GPIO18) signed char counter = 0; void Init_Gpio(void); void main(void) InitSysCtrl(); DINT; InitPieCtrl(); IER = 0x0000; IFR = 0x0000; InitPieVectTable(); Init_Gpio(); EINT; ERTM; for(;;) if(left_sw_on) counter ++; if(right_sw_on) counter --; if(counter > 3) counter = 0; else if(counter < 0) counter = 3; GpioDataRegs.GPACLEAR.all = 0x C;
9 GpioDataRegs.GPASET.all = 1 << (2 + counter); DELAY_US(100000); DELAY_US(100000); DELAY_US(100000); DELAY_US(100000); DELAY_US(100000); void Init_Gpio(void) GpioCtrlRegs.GPADIR.all = 0x C; GpioCtrlRegs.GPAMUX2.all = 0; GpioDataRegs.GPACLEAR.all = 0xFFFFFFFF; <GPIO 실습첫번째기본실험코드 > #include "DSP28x_Project.h" interrupt void cpu_timer0_isr(void); void Init_Gpio(void); void main(void) InitSysCtrl(); DINT; InitPieCtrl(); IER = 0x0000; IFR = 0x0000; InitPieVectTable(); Init_Gpio(); PieVectTable.TINT0 = &cpu_timer0_isr; InitCpuTimers(); ConfigCpuTimer(&CpuTimer0, 80, ); CpuTimer0Regs.TCR.all = 0x4000; IER = M_INT1; PieCtrlRegs.PIEIER1.bit.INTx7 = 1; EINT; ERTM; for(;;) interrupt void cpu_timer0_isr(void) CpuTimer0.InterruptCount++; GpioDataRegs.GPATOGGLE.all = 0x C; PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
10 void Init_Gpio(void) GpioCtrlRegs.GPADIR.all = 0x C; GpioCtrlRegs.GPAMUX2.all = 0; GpioDataRegs.GPACLEAR.all = 0xFFFFFFFF; <GPIO 실습두번째기본실험코드 > epwm 실습 앞서실습한 GPIO 기능과새로학습하는 epwm 을이용하여모터의속도를스위치입력을통해바꾸는실습을진행한다. 이를통해사용자는 epwm 의기본적인사용법을학습한다. epwm 에는이외에도 DeadBand, TripZone 등다양한부가기능이있으나역시기본적인기능수행과는별개의기능이므로생략하였다. 응용실습은방향까지바꾸어본다. #include "DSP28x_Project.h" #define LEFT_SW_ON (!GpioDataRegs.GPADAT.bit.GPIO18) #define RIGHT_SW_ON (!GpioDataRegs.GPADAT.bit.GPIO16) signed long counter = 0; void Init_Epwm(void); void Init_Dir_Gpio(void); void main(void) InitSysCtrl(); DINT; InitPieCtrl(); IER = 0x0000; IFR = 0x0000; InitPieVectTable(); InitEPwm1Gpio(); Init_Dir_Gpio(); Init_Epwm(); EINT; ERTM; for(;;) if(left_sw_on) EPwm1Regs.CMPA.half.CMPA++;; if(right_sw_on) EPwm1Regs.CMPA.half.CMPA--;; DSP28x_usDelay(1000); void Init_Epwm(void)
11 SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; EPwm1Regs.TBCTL.bit.CTRMODE = 0x0; EPwm1Regs.TBPRD = 0xFFFF; EPwm1Regs.TBCTL.bit.PHSEN = 0; EPwm1Regs.TBCTL.bit.HSPCLKDIV = 0x1; EPwm1Regs.TBCTL.bit.CLKDIV = 0x1; EPwm1Regs.CMPCTL.bit.SHDWAMODE = 0x0; EPwm1Regs.CMPCTL.bit.LOADAMODE = 0x0; EPwm1Regs.CMPA.half.CMPA = 0x00000; EPwm1Regs.AQCTLA.bit.PRD = 0x2; EPwm1Regs.AQCTLA.bit.CAU = 0x1; SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; void Init_Dir_Gpio(void) GpioCtrlRegs.GPADIR.bit.GPIO1 = 1; GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 0x0; <epwm 실습기본실험코드 > SCI 실습 이실습에서는 AVR 에서보내오는엔코더카운트값을실시간디버깅을통해확인하는작업을한다. 이를통해사용자는 의기본적인 SCI 사용법을학습하고서로다른 MCU 간의데이터교환을체험할수있다. #include "DSP28x_Project.h" void Init_Sci(void); void main(void) InitSysCtrl(); DINT; InitPieCtrl(); InitSciaGpio(); Init_Sci(); IER = 0x0000; IFR = 0x0000; InitPieVectTable(); EINT; ERTM; for(;;)
12 void Init_Sci(void) SciaRegs.SCICCR.all =0x0007; SciaRegs.SCICTL1.all =0x0001; SciaRegs.SCIHBAUD =0x0001; SciaRegs.SCILBAUD =0x0003; SciaRegs.SCICTL1.all =0x0021; SciaRegs.SCIFFTX.all=0xE040; SciaRegs.SCIFFCT.all=0x0; 모터제어실습 <SCI 실습기본실험코드 > 앞서실습했던내용들을종합하여하나의모터제어를실습해본다. GPIO 에서실습했던내용으로제어주기와모터방향을조정한다. epwm 에서실습했던내용으로모터의속도를조정한다. SCI 에서실습했던내용으로 AVR 을통해모터의 FeedBack Data 를수집한다. 이를통합하여하나의 PID 위치제어기를구성한다. #include "DSP28x_Project.h" #define PWM_MAX 5000 #define CW GpioDataRegs.GPACLEAR.bit.GPIO1 = 1 #define CCW GpioDataRegs.GPASET.bit.GPIO1 = 1 void Init_Sci(void); void Init_Epwm(void); void Init_Dir_Gpio(void); interrupt void cpu_timer0_isr(void); char encoder_data_int_buff = 0; float encoder_data = 0; float desired = 0; float error = 0; float Pgain = 0; float output = 0; void main(void) InitSysCtrl(); DINT; InitPieCtrl(); IER = 0x0000; IFR = 0x0000; InitPieVectTable(); InitSciaGpio(); Init_Sci(); InitEPwm1Gpio(); Init_Dir_Gpio(); Init_Epwm();
13 PieVectTable.TINT0 = &cpu_timer0_isr; InitCpuTimers(); ConfigCpuTimer(&CpuTimer0, 80, 10000); CpuTimer0Regs.TCR.all = 0x4000; IER = M_INT1; PieCtrlRegs.PIEIER1.bit.INTx7 = 1; EINT; ERTM; for(;;) interrupt void cpu_timer0_isr(void) CpuTimer0.InterruptCount++; encoder_data_int_buff = SciaRegs.SCIRXBUF.bit.RXDT; encoder_data = (float)encoder_data_int_buff; error = desired - encoder_data; output = error * Pgain; if(output < 0) CW; output *= -1; else CCW; if(output > PWM_MAX) output = PWM_MAX; EPwm1Regs.CMPA.half.CMPA = (unsigned int)output; PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; void Init_Sci(void) SciaRegs.SCICCR.all =0x0007; SciaRegs.SCICTL1.all =0x0001; SciaRegs.SCIHBAUD =0x0001; SciaRegs.SCILBAUD =0x0003; SciaRegs.SCICTL1.all =0x0021; SciaRegs.SCIFFTX.all=0xE040; SciaRegs.SCIFFCT.all=0x0; void Init_Epwm(void) SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; EPwm1Regs.TBCTL.bit.CTRMODE = 0x0; EPwm1Regs.TBPRD = PWM_MAX; EPwm1Regs.TBCTL.bit.PHSEN = 0; EPwm1Regs.TBCTL.bit.HSPCLKDIV = 0x1; EPwm1Regs.TBCTL.bit.CLKDIV = 0x1; EPwm1Regs.CMPCTL.bit.SHDWAMODE = 0x0; EPwm1Regs.CMPCTL.bit.LOADAMODE = 0x0; EPwm1Regs.CMPA.half.CMPA = 0x00000;
14 - 결론 EPwm1Regs.AQCTLA.bit.PRD = 0x2; EPwm1Regs.AQCTLA.bit.CAU = 0x1; SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; void Init_Dir_Gpio(void) GpioCtrlRegs.GPADIR.bit.GPIO1 = 1; GpioCtrlRegs.GPAMUX1.bit.GPIO1 = 0x0; < 모터제어실습기본실험코드 > 소프트웨어에첨부된모든코드들은분량관계상주석을삭제하였다. 본작품을통해 MCU 학습자들은 TI 사의고성능프로세서를체험하고학습할수있다. 일반적으로 TI 사의고성능 MCU 가학습현장에서사용되지못하는이유는비싼개발환경구성과복잡하고많은기능때문에처음사용자가접근하기어렵기때문이다. 이키트는 TI 사의기본솔루션을응용, 확장하여실교육현장에서필요로하는부분과조건을만족시켰으며, MCU 의사용난이도역시기존에사용이많은타사의 MCU 를먼저학습하고사용해봄으로써낮추어주었다. 본작품은 TI 사의 MCU 저변확대에기여하였으며, 고성능 MCU 의보급으로더질좋고창의적인로봇의개발이가능해졌다. 참고문헌 - TMS320x2806x Piccolo Technical Reference Guide (Rev. D) TI - 마이크로컨트롤러의기초및활용 이지홍, 유용길외 5 명, GS 인터비젼
슬라이드 1
 마이크로컨트롤러 2 (MicroController2) 2 강 ATmega128 의 external interrupt 이귀형교수님 학습목표 interrupt 란무엇인가? 기본개념을알아본다. interrupt 중에서가장사용하기쉬운 external interrupt 의사용방법을학습한다. 1. Interrupt 는왜필요할까? 함수동작을추가하여실행시키려면? //***
마이크로컨트롤러 2 (MicroController2) 2 강 ATmega128 의 external interrupt 이귀형교수님 학습목표 interrupt 란무엇인가? 기본개념을알아본다. interrupt 중에서가장사용하기쉬운 external interrupt 의사용방법을학습한다. 1. Interrupt 는왜필요할까? 함수동작을추가하여실행시키려면? //***
TMS320F28335 칩과 SYNCWORKS 사에서제작한 SMC150 기판을사용하기로결정하였다. 마지막으로소리출력부분에대해서는 MP3 모듈과스피커를사용, 해당구간에해당하는음원파일을재생하기위한장치로네오틱스사에서나온 NA-EMP3 보드와 NA-EMP3M 칩을사용하여소리를
 소리나는모터시스템을이용한전기자동차개발 Development of Electric Car by Application of Virtual Motor Sound System 전기전자공학전공 : 김주성, 김성기 Ju-Sung Kim and Seong-Ki Kim 강원대학교 IT 대학전기전자공학부전기전자공학전공 E-mail: [email protected], [email protected]
소리나는모터시스템을이용한전기자동차개발 Development of Electric Car by Application of Virtual Motor Sound System 전기전자공학전공 : 김주성, 김성기 Ju-Sung Kim and Seong-Ki Kim 강원대학교 IT 대학전기전자공학부전기전자공학전공 E-mail: [email protected], [email protected]
K&R2 Reference Manual 번역본
 typewriter structunion struct union if-else if if else if if else if if if if else else ; auto register static extern typedef void char short int long float double signed unsigned const volatile { } struct
typewriter structunion struct union if-else if if else if if else if if if if else else ; auto register static extern typedef void char short int long float double signed unsigned const volatile { } struct
Microsoft PowerPoint - ccs33_bios_com1_semaphore.ppt [호환 모드]
![Microsoft PowerPoint - ccs33_bios_com1_semaphore.ppt [호환 모드]](/thumbs/103/159058087.jpg "Microsoft PowerPoint - ccs33_bios_com1_semaphore.ppt [호환 모드]") 1. CCS3.3 DSP/BIOS semaphore 를이용한 COM1 시리얼통신 기존의예제프로그램을바탕으로실제현장에적용가능한 BIOS 프로그램을시작하겠습니다. 이장에서사용할 H/W 는 F28335 내부에있는 UART0 포트를사용해 PC 와 RS-232 통신을 프로세서간동기를맞추는데사용하는 semaphore 를사용해작성해보겠습니다. -Semaphore 란 C
1. CCS3.3 DSP/BIOS semaphore 를이용한 COM1 시리얼통신 기존의예제프로그램을바탕으로실제현장에적용가능한 BIOS 프로그램을시작하겠습니다. 이장에서사용할 H/W 는 F28335 내부에있는 UART0 포트를사용해 PC 와 RS-232 통신을 프로세서간동기를맞추는데사용하는 semaphore 를사용해작성해보겠습니다. -Semaphore 란 C
Microsoft PowerPoint - es-arduino-lecture-03
 임베디드시스템개론 : Arduino 활용 Lecture #3: Button Input & FND Control 2012. 3. 25 by 김영주 강의목차 디지털입력 Button switch 입력 Button Debounce 7-Segment FND : 직접제어 7-Segment FND : IC 제어 2 디지털입력 : Switch 입력 (1) 실습목표 아두이노디지털입력처리실습
임베디드시스템개론 : Arduino 활용 Lecture #3: Button Input & FND Control 2012. 3. 25 by 김영주 강의목차 디지털입력 Button switch 입력 Button Debounce 7-Segment FND : 직접제어 7-Segment FND : IC 제어 2 디지털입력 : Switch 입력 (1) 실습목표 아두이노디지털입력처리실습
목차 포인터의개요 배열과포인터 포인터의구조 실무응용예제 C 2
 제 8 장. 포인터 목차 포인터의개요 배열과포인터 포인터의구조 실무응용예제 C 2 포인터의개요 포인터란? 주소를변수로다루기위한주소변수 메모리의기억공간을변수로써사용하는것 포인터변수란데이터변수가저장되는주소의값을 변수로취급하기위한변수 C 3 포인터의개요 포인터변수및초기화 * 변수데이터의데이터형과같은데이터형을포인터 변수의데이터형으로선언 일반변수와포인터변수를구별하기위해
제 8 장. 포인터 목차 포인터의개요 배열과포인터 포인터의구조 실무응용예제 C 2 포인터의개요 포인터란? 주소를변수로다루기위한주소변수 메모리의기억공간을변수로써사용하는것 포인터변수란데이터변수가저장되는주소의값을 변수로취급하기위한변수 C 3 포인터의개요 포인터변수및초기화 * 변수데이터의데이터형과같은데이터형을포인터 변수의데이터형으로선언 일반변수와포인터변수를구별하기위해
인터럽트 (Interrupt) 범용입출력포트에서입출력의내용을처리하기위해매번입출력을요구하는플래그를검사하는일 (Pollong) 에대하여마이크로컨트롤러에게는상당한시간을소비하게만든다. 인터럽트란 CPU가현재처리하고있는일보다급하게처리해야할사건이발생했을때, 현재수행중인일을중단하고
 범용입출력포트에서입출력의내용을처리하기위해매번입출력을요구하는플래그를검사하는일 (Pollong) 에대하여마이크로컨트롤러에게는상당한시간을소비하게만든다. 인터럽트란 CPU가현재처리하고있는일보다급하게처리해야할사건이발생했을때, 현재수행중인일을중단하고") CHAPTER 7 인터럽트 가. 레지스터구조이해하기 나. 엔코더제어하기 인터럽트 (Interrupt) 범용입출력포트에서입출력의내용을처리하기위해매번입출력을요구하는플래그를검사하는일 (Pollong) 에대하여마이크로컨트롤러에게는상당한시간을소비하게만든다. 인터럽트란 CPU가현재처리하고있는일보다급하게처리해야할사건이발생했을때, 현재수행중인일을중단하고급한일을처리한후에본래의일을다시수행하는것을말한다.
CHAPTER 7 인터럽트 가. 레지스터구조이해하기 나. 엔코더제어하기 인터럽트 (Interrupt) 범용입출력포트에서입출력의내용을처리하기위해매번입출력을요구하는플래그를검사하는일 (Pollong) 에대하여마이크로컨트롤러에게는상당한시간을소비하게만든다. 인터럽트란 CPU가현재처리하고있는일보다급하게처리해야할사건이발생했을때, 현재수행중인일을중단하고급한일을처리한후에본래의일을다시수행하는것을말한다.
(6)
") 5-6. EV 모듈의 PWM 출력예제목표 : 본예제에서는 EV(Event Manager) 모듈의 PWM 출력에대해학습한다. DSP8x에는 3상 AC 모터를구동할수있는 조의 PWM과엔코더입력회로가있다. 본예제에서는이 PWM 출력을사용하여 DC 모터의속도를조절해보고, RC 회로로 PWM 를필터링하여사인파형을출력시켜본다. 사용회로고찰 : 3.3V AR Kx4 3
5-6. EV 모듈의 PWM 출력예제목표 : 본예제에서는 EV(Event Manager) 모듈의 PWM 출력에대해학습한다. DSP8x에는 3상 AC 모터를구동할수있는 조의 PWM과엔코더입력회로가있다. 본예제에서는이 PWM 출력을사용하여 DC 모터의속도를조절해보고, RC 회로로 PWM 를필터링하여사인파형을출력시켜본다. 사용회로고찰 : 3.3V AR Kx4 3
학습목차 2.1 다차원배열이란 차원배열의주소와값의참조
 - Part2- 제 2 장다차원배열이란무엇인가 학습목차 2.1 다차원배열이란 2. 2 2 차원배열의주소와값의참조 2.1 다차원배열이란 2.1 다차원배열이란 (1/14) 다차원배열 : 2 차원이상의배열을의미 1 차원배열과다차원배열의비교 1 차원배열 int array [12] 행 2 차원배열 int array [4][3] 행 열 3 차원배열 int array [2][2][3]
- Part2- 제 2 장다차원배열이란무엇인가 학습목차 2.1 다차원배열이란 2. 2 2 차원배열의주소와값의참조 2.1 다차원배열이란 2.1 다차원배열이란 (1/14) 다차원배열 : 2 차원이상의배열을의미 1 차원배열과다차원배열의비교 1 차원배열 int array [12] 행 2 차원배열 int array [4][3] 행 열 3 차원배열 int array [2][2][3]
가. 도트매트릭스제어하기 단일 LED와는다르게도트매트릭스를구동시는구동전류가프로세서에서출력되는전류보다사용량을더많이필요하기때문에 TTL 계열의 IC로구동시키기에는무리가따른다. 이러한문제를해결하기위해서사용전압, 전류정격이높은달링턴트랜지스터가어레이형태로들어있는 ULN2803을
 CHAPTER 5 도트매트릭스제어하기 가. 도트매트릭스제어하기 가. 도트매트릭스제어하기 단일 LED와는다르게도트매트릭스를구동시는구동전류가프로세서에서출력되는전류보다사용량을더많이필요하기때문에 TTL 계열의 IC로구동시키기에는무리가따른다. 이러한문제를해결하기위해서사용전압, 전류정격이높은달링턴트랜지스터가어레이형태로들어있는 ULN2803을이용한다. 이 IC에는 8개의
CHAPTER 5 도트매트릭스제어하기 가. 도트매트릭스제어하기 가. 도트매트릭스제어하기 단일 LED와는다르게도트매트릭스를구동시는구동전류가프로세서에서출력되는전류보다사용량을더많이필요하기때문에 TTL 계열의 IC로구동시키기에는무리가따른다. 이러한문제를해결하기위해서사용전압, 전류정격이높은달링턴트랜지스터가어레이형태로들어있는 ULN2803을이용한다. 이 IC에는 8개의
<4D F736F F F696E74202D20B8B6C0CCC5A9B7CEC7C1B7CEBCBCBCAD202839C1D6C2F7207E203135C1D6C2F >
 10주차 문자 LCD 의인터페이스회로및구동함수 Next-Generation Networks Lab. 5. 16x2 CLCD 모듈 (HY-1602H-803) 그림 11-18 19 핀설명표 11-11 번호 분류 핀이름 레벨 (V) 기능 1 V SS or GND 0 GND 전원 2 V Power DD or V CC +5 CLCD 구동전원 3 V 0 - CLCD 명암조절
10주차 문자 LCD 의인터페이스회로및구동함수 Next-Generation Networks Lab. 5. 16x2 CLCD 모듈 (HY-1602H-803) 그림 11-18 19 핀설명표 11-11 번호 분류 핀이름 레벨 (V) 기능 1 V SS or GND 0 GND 전원 2 V Power DD or V CC +5 CLCD 구동전원 3 V 0 - CLCD 명암조절
<4D F736F F F696E74202D20BBB7BBB7C7D15F FBEDFB0A3B1B3C0B05FC1A634C0CFC2F72E BC8A3C8AF20B8F0B5E55D>
 뻔뻔한 AVR 프로그래밍 The 4 th Lecture 유명환 ( [email protected]) 1 시간 (Time) 에대한정의 INDEX 2 왜타이머 (Timer) 와카운터 (Counter) 인가? 3 ATmega128 타이머 / 카운터동작구조 4 ATmega128 타이머 / 카운터관련레지스터 5 뻔뻔한노하우 : 레지스터비트설정방법 6 ATmega128
뻔뻔한 AVR 프로그래밍 The 4 th Lecture 유명환 ( [email protected]) 1 시간 (Time) 에대한정의 INDEX 2 왜타이머 (Timer) 와카운터 (Counter) 인가? 3 ATmega128 타이머 / 카운터동작구조 4 ATmega128 타이머 / 카운터관련레지스터 5 뻔뻔한노하우 : 레지스터비트설정방법 6 ATmega128
TDB 3000 Series Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO
 Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO DRIVER 의장점을일체화저발열및토크특성우수 TDB 000 V 48 바이폴라 (Bipolar) Closed-Loop 스텝모터드라이버
Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO DRIVER 의장점을일체화저발열및토크특성우수 TDB 000 V 48 바이폴라 (Bipolar) Closed-Loop 스텝모터드라이버
Æí¶÷4-¼Ö·ç¼Çc03ÖÁ¾š
 솔루션 2006 454 2006 455 2006 456 2006 457 2006 458 2006 459 2006 460 솔루션 2006 462 2006 463 2006 464 2006 465 2006 466 솔루션 2006 468 2006 469 2006 470 2006 471 2006 472 2006 473 2006 474 2006 475 2006 476
솔루션 2006 454 2006 455 2006 456 2006 457 2006 458 2006 459 2006 460 솔루션 2006 462 2006 463 2006 464 2006 465 2006 466 솔루션 2006 468 2006 469 2006 470 2006 471 2006 472 2006 473 2006 474 2006 475 2006 476
Microsoft Word - EastSocket매뉴얼_ _.doc
 USB 전원을이용한 SMD 패키지라이팅지원보드 저가의라이팅장비를사용하여 SMD 패키지마이컴을라이팅할수있도록지원하는장비입니다. 각종제품개발시마이컴을 SMD로사용하는추세로이를양산에적용시고가의장비를사용해야했습니다. 아니면보드에다운로더를사용하여마이컴라이팅을했습니다. 그에따른생산속도의저하및고가의장비구입에따른경제적부담이컸습니다. 이를대처하기위해저가및기존개발에사용한장비를그대로사용하여라이팅을할수있는지원장비를개발했습니다.
USB 전원을이용한 SMD 패키지라이팅지원보드 저가의라이팅장비를사용하여 SMD 패키지마이컴을라이팅할수있도록지원하는장비입니다. 각종제품개발시마이컴을 SMD로사용하는추세로이를양산에적용시고가의장비를사용해야했습니다. 아니면보드에다운로더를사용하여마이컴라이팅을했습니다. 그에따른생산속도의저하및고가의장비구입에따른경제적부담이컸습니다. 이를대처하기위해저가및기존개발에사용한장비를그대로사용하여라이팅을할수있는지원장비를개발했습니다.
<4D F736F F F696E74202D20B8B6C0CCC5A9B7CEC7C1B7CEBCBCBCAD202834C1D6C2F7207E2038C1D6C2F729>
 8주차중간고사 ( 인터럽트및 A/D 변환기문제및풀이 ) Next-Generation Networks Lab. 외부입력인터럽트예제 문제 1 포트 A 의 7-segment 에초시계를구현한다. Tact 스위치 SW3 을 CPU 보드의 PE4 에연결한다. 그리고, SW3 을누르면하강 에지에서초시계가 00 으로초기화된다. 동시에 Tact 스위치 SW4 를 CPU 보드의
8주차중간고사 ( 인터럽트및 A/D 변환기문제및풀이 ) Next-Generation Networks Lab. 외부입력인터럽트예제 문제 1 포트 A 의 7-segment 에초시계를구현한다. Tact 스위치 SW3 을 CPU 보드의 PE4 에연결한다. 그리고, SW3 을누르면하강 에지에서초시계가 00 으로초기화된다. 동시에 Tact 스위치 SW4 를 CPU 보드의
XDS100S V3 Entry-level JTAG Emulator. Revision XDS100S V3 ( 사용매뉴얼 ) Rev TEL , FAX , .
 Rev TEL , FAX , .") Revision 12.01.31 XDS100S V3 ( 사용매뉴얼 ) Rev. 1.0.1 [1] page *Revision History 날짜 내용 2011. 12. 13. - Rev. 1.0 초판완성 2012. 01. 31. - Rev. 1.0.1 연결 Tip 추가 [2] page 목차 XDS100S V3... 1 1 제품구성... 4 2 XDS100S V3의특징...
Revision 12.01.31 XDS100S V3 ( 사용매뉴얼 ) Rev. 1.0.1 [1] page *Revision History 날짜 내용 2011. 12. 13. - Rev. 1.0 초판완성 2012. 01. 31. - Rev. 1.0.1 연결 Tip 추가 [2] page 목차 XDS100S V3... 1 1 제품구성... 4 2 XDS100S V3의특징...
Microsoft PowerPoint - ccs33_bios_PRD.ppt [호환 모드]
![Microsoft PowerPoint - ccs33_bios_PRD.ppt [호환 모드]](/thumbs/94/118693513.jpg "Microsoft PowerPoint - ccs33_bios_PRD.ppt [호환 모드]") 1. CCS3.3 DSP/BIOS PRD(periodic fuction manager) 생성 1. 디렉토리구성.. cmd..dsp2833x_headers.. include.. testprj_2.. testsrc_2 : Linker 컴맨드파일 : Chip관련헤더파일및헤더용 Linker 컴맨드파일 : 사용자인쿠르드파일 : 사용자프로젝트파일및실행파일 (.HEX)
1. CCS3.3 DSP/BIOS PRD(periodic fuction manager) 생성 1. 디렉토리구성.. cmd..dsp2833x_headers.. include.. testprj_2.. testsrc_2 : Linker 컴맨드파일 : Chip관련헤더파일및헤더용 Linker 컴맨드파일 : 사용자인쿠르드파일 : 사용자프로젝트파일및실행파일 (.HEX)
Motor Control Solution
 Motor Control Solution 마이크로칩에서는 Stepper, Brushed-DC, AC Induction, Switched Reluctance Brushless-DC 등모터종류별특성및동작방식에맞는 MCU가준비되어있어, User가 Motor를이용한 Application을개발하려할때에가장적절한 Solution을제시해줄수있다. 이중 FFT나 PID연산등정밀한모터제어를실행하기위해꼭해주어야하는빠른
Motor Control Solution 마이크로칩에서는 Stepper, Brushed-DC, AC Induction, Switched Reluctance Brushless-DC 등모터종류별특성및동작방식에맞는 MCU가준비되어있어, User가 Motor를이용한 Application을개발하려할때에가장적절한 Solution을제시해줄수있다. 이중 FFT나 PID연산등정밀한모터제어를실행하기위해꼭해주어야하는빠른
Microsoft PowerPoint - chap01-C언어개요.pptx
 #include int main(void) { int num; printf( Please enter an integer: "); scanf("%d", &num); if ( num < 0 ) printf("is negative.\n"); printf("num = %d\n", num); return 0; } 1 학습목표 프로그래밍의 기본 개념을
#include int main(void) { int num; printf( Please enter an integer: "); scanf("%d", &num); if ( num < 0 ) printf("is negative.\n"); printf("num = %d\n", num); return 0; } 1 학습목표 프로그래밍의 기본 개념을
[8051] 강의자료.PDF
![[8051] 강의자료.PDF](/thumbs/60/44663655.jpg "[8051] 강의자료.PDF") CY AC F0 RS1 RS0 OV - P 0xFF 0x80 0x7F 0x30 0x2F 0x20 0x1F 0x18 0x17 0x10 0x0F 0x08 0x07 0x00 0x0000 0x0FFF 0x1000 0xFFFF 0x0000 0xFFFF RAM SFR SMOD - - - GF1 GF0 PD IDL 31 19 18 9 12 13 14 15 1 2 3 4
CY AC F0 RS1 RS0 OV - P 0xFF 0x80 0x7F 0x30 0x2F 0x20 0x1F 0x18 0x17 0x10 0x0F 0x08 0x07 0x00 0x0000 0x0FFF 0x1000 0xFFFF 0x0000 0xFFFF RAM SFR SMOD - - - GF1 GF0 PD IDL 31 19 18 9 12 13 14 15 1 2 3 4
S O L U T I O N I N N O V A T I O N T P C M E C H A T R O N I C S TPC TPC SERVO & STEP MOTOR, DRIVER Series TDB2000 (일체형/분리형,
 S O L U T I O N I N N O V A T I O N T P C M E C H A T R O N I C S TPC-1606-1 www.tpcpage.co.kr TPC SERVO & STEP MOTOR, DRIVER Series TDB2000 (일체형/분리형, 제어기능 내장) TDB3000 (EtherCAT) TDCI (일체형, 제어기능 내장) TDB/TDU
S O L U T I O N I N N O V A T I O N T P C M E C H A T R O N I C S TPC-1606-1 www.tpcpage.co.kr TPC SERVO & STEP MOTOR, DRIVER Series TDB2000 (일체형/분리형, 제어기능 내장) TDB3000 (EtherCAT) TDCI (일체형, 제어기능 내장) TDB/TDU
(Asynchronous Mode) ( 1, 5~8, 1~2) & (Parity) 1 ; * S erial Port (BIOS INT 14H) - 1 -
 ( 1, 5~8, 1~2) & (Parity) 1 ; * S erial Port (BIOS INT 14H) - 1 -") (Asynchronous Mode) - - - ( 1, 5~8, 1~2) & (Parity) 1 ; * S erial Port (BIOS INT 14H) - 1 - UART (Univ ers al As y nchronous Receiver / T rans mitter) 8250A 8250A { COM1(3F8H). - Line Control Register
(Asynchronous Mode) - - - ( 1, 5~8, 1~2) & (Parity) 1 ; * S erial Port (BIOS INT 14H) - 1 - UART (Univ ers al As y nchronous Receiver / T rans mitter) 8250A 8250A { COM1(3F8H). - Line Control Register
Microsoft PowerPoint - chap02-C프로그램시작하기.pptx
 #include int main(void) { int num; printf( Please enter an integer "); scanf("%d", &num); if ( num < 0 ) printf("is negative.\n"); printf("num = %d\n", num); return 0; } 1 학습목표 을 작성하면서 C 프로그램의
#include int main(void) { int num; printf( Please enter an integer "); scanf("%d", &num); if ( num < 0 ) printf("is negative.\n"); printf("num = %d\n", num); return 0; } 1 학습목표 을 작성하면서 C 프로그램의
[ 융합과학 ] 과학고 R&E 결과보고서 뇌파를이용한곤충제어 연구기간 : ~ 연구책임자 : 최홍수 ( 대구경북과학기술원 ) 지도교사 : 박경희 ( 부산일과학고 ) 참여학생 : 김남호 ( 부산일과학고 ) 안진웅 ( 부산일과학고 )
![[ 융합과학 ] 과학고 R&E 결과보고서 뇌파를이용한곤충제어 연구기간 : ~ 연구책임자 : 최홍수 ( 대구경북과학기술원 ) 지도교사 : 박경희 ( 부산일과학고 ) 참여학생 : 김남호 ( 부산일과학고 ) 안진웅 ( 부산일과학고 )](/thumbs/103/161238827.jpg "[ 융합과학 ] 과학고 R&E 결과보고서 뇌파를이용한곤충제어 연구기간 : ~ 연구책임자 : 최홍수 ( 대구경북과학기술원 ) 지도교사 : 박경희 ( 부산일과학고 ) 참여학생 : 김남호 ( 부산일과학고 ) 안진웅 ( 부산일과학고 )") [ 융합과학 ] 과학고 R&E 결과보고서 뇌파를이용한곤충제어 연구기간 : 2013. 3. 1 ~ 2014. 2. 28 연구책임자 : 최홍수 ( 대구경북과학기술원 ) 지도교사 : 박경희 ( 부산일과학고 ) 참여학생 : 김남호 ( 부산일과학고 ) 안진웅 ( 부산일과학고 ) 장은영 ( 부산일과학고 ) 정우현 ( 부산일과학고 ) 조아현 ( 부산일과학고 ) 1 -
[ 융합과학 ] 과학고 R&E 결과보고서 뇌파를이용한곤충제어 연구기간 : 2013. 3. 1 ~ 2014. 2. 28 연구책임자 : 최홍수 ( 대구경북과학기술원 ) 지도교사 : 박경희 ( 부산일과학고 ) 참여학생 : 김남호 ( 부산일과학고 ) 안진웅 ( 부산일과학고 ) 장은영 ( 부산일과학고 ) 정우현 ( 부산일과학고 ) 조아현 ( 부산일과학고 ) 1 -
KEY 디바이스 드라이버
 KEY 디바이스드라이버 임베디드시스템소프트웨어 I (http://et.smu.ac.kr et.smu.ac.kr) 차례 GPIO 및 Control Registers KEY 하드웨어구성 KEY Driver 프로그램 key-driver.c 시험응용프로그램 key-app.c KEY 디바이스드라이버 11-2 GPIO(General-Purpose Purpose I/O)
KEY 디바이스드라이버 임베디드시스템소프트웨어 I (http://et.smu.ac.kr et.smu.ac.kr) 차례 GPIO 및 Control Registers KEY 하드웨어구성 KEY Driver 프로그램 key-driver.c 시험응용프로그램 key-app.c KEY 디바이스드라이버 11-2 GPIO(General-Purpose Purpose I/O)
Microsoft Word doc
 2. 디바이스드라이버 [ DIO ] 2.1. 개요 타겟보드의데이터버스를이용하여 LED 및스위치동작을제어하는방법을설명하겠다. 2.2. 회로도 2.3. 준비조건 ARM 용크로스컴파일러가설치되어있어야한다. 하드웨어적인점검을하여정상적인동작을한다고가정한다. NFS(Network File System) 를사용할경우에는 NFS가마운트되어있어야한다. 여기서는소스전문을포함하지않았다.
2. 디바이스드라이버 [ DIO ] 2.1. 개요 타겟보드의데이터버스를이용하여 LED 및스위치동작을제어하는방법을설명하겠다. 2.2. 회로도 2.3. 준비조건 ARM 용크로스컴파일러가설치되어있어야한다. 하드웨어적인점검을하여정상적인동작을한다고가정한다. NFS(Network File System) 를사용할경우에는 NFS가마운트되어있어야한다. 여기서는소스전문을포함하지않았다.
Microsoft PowerPoint - ch07 - 포인터 pm0415
 2015-1 프로그래밍언어 7. 포인터 (Pointer), 동적메모리할당 2015 년 4 월 4 일 교수김영탁 영남대학교공과대학정보통신공학과 (Tel : +82-53-810-2497; Fax : +82-53-810-4742 http://antl.yu.ac.kr/; E-mail : [email protected]) Outline 포인터 (pointer) 란? 간접참조연산자
2015-1 프로그래밍언어 7. 포인터 (Pointer), 동적메모리할당 2015 년 4 월 4 일 교수김영탁 영남대학교공과대학정보통신공학과 (Tel : +82-53-810-2497; Fax : +82-53-810-4742 http://antl.yu.ac.kr/; E-mail : [email protected]) Outline 포인터 (pointer) 란? 간접참조연산자
*Revision History 날짜 내용 최초작성 Tel Fax [2] page
![*Revision History 날짜 내용 최초작성 Tel Fax [2] page](/thumbs/87/95015203.jpg "*Revision History 날짜 내용 최초작성 Tel Fax [2] page") MSP430-SDS100i 매뉴얼 V1.0 Tel. 031-781-2812 Fax. 031-706-2834 E-mail. [email protected] [1] page *Revision History 날짜 내용 2013. 07. 010 최초작성 Tel. 031-781-2812 Fax. 031-706-2834 E-mail. [email protected]
MSP430-SDS100i 매뉴얼 V1.0 Tel. 031-781-2812 Fax. 031-706-2834 E-mail. [email protected] [1] page *Revision History 날짜 내용 2013. 07. 010 최초작성 Tel. 031-781-2812 Fax. 031-706-2834 E-mail. [email protected]
목차 1. 키패드 (KeyPAD) 2. KeyPAD 를이용한비밀번호입력기
 2. KeyPAD 를이용한비밀번호입력기") Chapter. 13 KeyPAD 를이용한비밀번호입력기 HBE-MCU-Multi AVR Jaeheung, Lee 목차 1. 키패드 (KeyPAD) 2. KeyPAD 를이용한비밀번호입력기 키패드 (KeyPAD) 키패드 (KeyPAD) 마이크로컨트롤러활용에서사용자의입력을받아들이기위한장치 전화기, 컴퓨터, 핸드폰, 냉장고등거의모든가전제품에서사용 키패드인터페이스방식
Chapter. 13 KeyPAD 를이용한비밀번호입력기 HBE-MCU-Multi AVR Jaeheung, Lee 목차 1. 키패드 (KeyPAD) 2. KeyPAD 를이용한비밀번호입력기 키패드 (KeyPAD) 키패드 (KeyPAD) 마이크로컨트롤러활용에서사용자의입력을받아들이기위한장치 전화기, 컴퓨터, 핸드폰, 냉장고등거의모든가전제품에서사용 키패드인터페이스방식
À̵¿·Îº¿ÀÇ ÀÎÅͳݱâ¹Ý ¿ø°ÝÁ¦¾î½Ã ½Ã°£Áö¿¬¿¡_.hwp
 l Y ( X g, Y g ) r v L v v R L θ X ( X c, Yc) W (a) (b) DC 12V 9A Battery 전원부 DC-DC Converter +12V, -12V DC-DC Converter 5V DC-AC Inverter AC 220V DC-DC Converter 3.3V Motor Driver 80196kc,PWM Main
l Y ( X g, Y g ) r v L v v R L θ X ( X c, Yc) W (a) (b) DC 12V 9A Battery 전원부 DC-DC Converter +12V, -12V DC-DC Converter 5V DC-AC Inverter AC 220V DC-DC Converter 3.3V Motor Driver 80196kc,PWM Main
(b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로
 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로") Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
The Pocket Guide to TCP/IP Sockets: C Version
 인터넷프로토콜 03 장 도메인네임시스템과주소 패밀리 (IPv4-IPv6 서비스 ) 1 목차 제 3 장도메인네임시스템과주소패밀리 3.1 도메인네임주소를숫자주소로매핑하기 3.2 IP 버전에무관한주소-범용코드의작성 3.3 숫자주소에서도메인네임주소획득하기 2 getaddrinfo() 를활용한주소 범용 (Generic) 코드 주소범용 (Generic) 코드란? 주소버전
인터넷프로토콜 03 장 도메인네임시스템과주소 패밀리 (IPv4-IPv6 서비스 ) 1 목차 제 3 장도메인네임시스템과주소패밀리 3.1 도메인네임주소를숫자주소로매핑하기 3.2 IP 버전에무관한주소-범용코드의작성 3.3 숫자주소에서도메인네임주소획득하기 2 getaddrinfo() 를활용한주소 범용 (Generic) 코드 주소범용 (Generic) 코드란? 주소버전
PowerPoint 프레젠테이션
 KeyPad Device Control - Device driver Jo, Heeseung HBE-SM5-S4210 에는 16 개의 Tack Switch 를사용하여 4 행 4 열의 Keypad 가장착 4x4 Keypad 2 KeyPad 를제어하기위하여 FPGA 내부에 KeyPad controller 가구현 KeyPad controller 16bit 로구성된
KeyPad Device Control - Device driver Jo, Heeseung HBE-SM5-S4210 에는 16 개의 Tack Switch 를사용하여 4 행 4 열의 Keypad 가장착 4x4 Keypad 2 KeyPad 를제어하기위하여 FPGA 내부에 KeyPad controller 가구현 KeyPad controller 16bit 로구성된
Chapter. 14 DAC 를이용한 LED 밝기제어 HBE-MCU-Multi AVR Jaeheung, Lee
 Chapter. 14 DAC 를이용한 LED 밝기제어 HBE-MCU-Multi AVR Jaeheung, Lee 목차 1. D/A 변환기 2. 병렬 D/A 변환기로 LED 밝기제어하기 3. 직렬 D/A 변환기로 LED 밝기제어하기 D/A 변환기 D/A 변환기 (Digital to Analog Converter) 디지털데이터를아날로그전압으로변환하는소자 A/D변환기와함께마이크로프로세서응용회로에서널리사용됨.
Chapter. 14 DAC 를이용한 LED 밝기제어 HBE-MCU-Multi AVR Jaeheung, Lee 목차 1. D/A 변환기 2. 병렬 D/A 변환기로 LED 밝기제어하기 3. 직렬 D/A 변환기로 LED 밝기제어하기 D/A 변환기 D/A 변환기 (Digital to Analog Converter) 디지털데이터를아날로그전압으로변환하는소자 A/D변환기와함께마이크로프로세서응용회로에서널리사용됨.
Microsoft Word - PEB08_USER_GUIDE.doc
 0. PEB08 이란? PEB08(PIC EVALUATION BOARD 8bits) 은 Microchip 8bit Device 개발을쉽고편리하게할수있는보드입니다. 1. 다양한 8bit Device 지원 기존대부분의 8bit 보드의경우일부 Pin-Count만지원을하였지만, PEB08은 PIC10, PIC12, PIC16, PIC18의 DIP Type Package의모든
0. PEB08 이란? PEB08(PIC EVALUATION BOARD 8bits) 은 Microchip 8bit Device 개발을쉽고편리하게할수있는보드입니다. 1. 다양한 8bit Device 지원 기존대부분의 8bit 보드의경우일부 Pin-Count만지원을하였지만, PEB08은 PIC10, PIC12, PIC16, PIC18의 DIP Type Package의모든
1. 제품규격및특징 구분 규격및특징 입력전압 DC 12~30V 모터구동방식 Bipolar 방식 최대모터전류 Max 3.0A 초기설정정지전류 :4(0.46A), 구동전류 :18(1.75A) 분주비 0(x256), 1(x128), 2(x64), 3(x32), 4(x16),
, 구동전류 :18(1.75A) 분주비 0(x256), 1(x128), 2(x64), 3(x32), 4(x16),") All In OneSTEP MBCD-13A ( 스텝모터용 1 축컨트롤러 / 드라이버일체형 ) 사용설명서 MotionBank 1. 제품규격및특징 구분 규격및특징 입력전압 DC 12~30V 모터구동방식 Bipolar 방식 최대모터전류 Max 3.0A 초기설정정지전류 :4(0.46A), 구동전류 :18(1.75A) 분주비 0(x256), 1(x128), 2(x64),
All In OneSTEP MBCD-13A ( 스텝모터용 1 축컨트롤러 / 드라이버일체형 ) 사용설명서 MotionBank 1. 제품규격및특징 구분 규격및특징 입력전압 DC 12~30V 모터구동방식 Bipolar 방식 최대모터전류 Max 3.0A 초기설정정지전류 :4(0.46A), 구동전류 :18(1.75A) 분주비 0(x256), 1(x128), 2(x64),
구성품 - UMD 2808 모듈 - JTAG 커넥터 - 젂원 케이블 주요 특징 모듈의 부품화 : 고신뢰성의 DSP 모듈을 최적화된 시스템에 적용 용이 TMS320F2808 ZGMS - 100MHz 탑재 : 확장된 온도규격 (-40 도 ~ 125 도) 적용 Ultralo
 적용 Ultralo") TMS320F2808 UMD 모듈 Rev 1.0 (주) 싱크웍스 Korea Tel. 031-781-2810 Fax. 031-706-2834 E-mail. [email protected] [1] page 구성품 - UMD 2808 모듈 - JTAG 커넥터 - 젂원 케이블 주요 특징 모듈의 부품화 : 고신뢰성의 DSP 모듈을 최적화된 시스템에 적용
TMS320F2808 UMD 모듈 Rev 1.0 (주) 싱크웍스 Korea Tel. 031-781-2810 Fax. 031-706-2834 E-mail. [email protected] [1] page 구성품 - UMD 2808 모듈 - JTAG 커넥터 - 젂원 케이블 주요 특징 모듈의 부품화 : 고신뢰성의 DSP 모듈을 최적화된 시스템에 적용
11장 포인터
 누구나즐기는 C 언어콘서트 제 9 장포인터 이번장에서학습할내용 포인터이란? 변수의주소 포인터의선언 간접참조연산자 포인터연산 포인터와배열 포인터와함수 이번장에서는포인터의기초적인지식을학습한다. 포인터란? 포인터 (pointer): 주소를가지고있는변수 메모리의구조 변수는메모리에저장된다. 메모리는바이트단위로액세스된다. 첫번째바이트의주소는 0, 두번째바이트는 1, 변수와메모리
누구나즐기는 C 언어콘서트 제 9 장포인터 이번장에서학습할내용 포인터이란? 변수의주소 포인터의선언 간접참조연산자 포인터연산 포인터와배열 포인터와함수 이번장에서는포인터의기초적인지식을학습한다. 포인터란? 포인터 (pointer): 주소를가지고있는변수 메모리의구조 변수는메모리에저장된다. 메모리는바이트단위로액세스된다. 첫번째바이트의주소는 0, 두번째바이트는 1, 변수와메모리
untitled
 while do-while for break continue while( ) ; #include 0 i int main(void) int meter; int i = 0; while(i < 3) meter = i * 1609; printf("%d %d \n", i, meter); i++; return 0; i i< 3 () 0 (1)
while do-while for break continue while( ) ; #include 0 i int main(void) int meter; int i = 0; while(i < 3) meter = i * 1609; printf("%d %d \n", i, meter); i++; return 0; i i< 3 () 0 (1)
PowerPoint 프레젠테이션
 System Software Experiment 1 Lecture 5 - Array Spring 2019 Hwansoo Han ([email protected]) Advanced Research on Compilers and Systems, ARCS LAB Sungkyunkwan University http://arcs.skku.edu/ 1 배열 (Array) 동일한타입의데이터가여러개저장되어있는저장장소
System Software Experiment 1 Lecture 5 - Array Spring 2019 Hwansoo Han ([email protected]) Advanced Research on Compilers and Systems, ARCS LAB Sungkyunkwan University http://arcs.skku.edu/ 1 배열 (Array) 동일한타입의데이터가여러개저장되어있는저장장소
제8장 자바 GUI 프로그래밍 II
 제8장 MVC Model 8.1 MVC 모델 (1/7) MVC (Model, View, Controller) 모델 스윙은 MVC 모델에기초를두고있다. MVC란 Xerox의연구소에서 Smalltalk 언어를바탕으로사용자인터페이스를개발하기위한방법 MVC는 3개의구성요소로구성 Model : 응용프로그램의자료를표현하기위한모델 View : 자료를시각적으로 (GUI 방식으로
제8장 MVC Model 8.1 MVC 모델 (1/7) MVC (Model, View, Controller) 모델 스윙은 MVC 모델에기초를두고있다. MVC란 Xerox의연구소에서 Smalltalk 언어를바탕으로사용자인터페이스를개발하기위한방법 MVC는 3개의구성요소로구성 Model : 응용프로그램의자료를표현하기위한모델 View : 자료를시각적으로 (GUI 방식으로
b027_2005_3462.hwp
 작품번호 제 27 회전국학생과학발명품경진대회 에어트랙을활용한운동상태변화측정의 시각화장치제작에관한탐구지도 출품분야지도논문출품부문학습용품 2005. 6.. 시 도 학교 ( 소속 ) 학년 ( 직위 ) 성 명 인천광역시인천과학고등학교교사김남두 지도학생인천과학고등학교 2 학년박태희 학교에서과학 ( 물리 ) 수업은흥미를유발시킬수있는실험보다는이론과문제풀이가위주로되어있어호기심을충족시키지못하고있다.
작품번호 제 27 회전국학생과학발명품경진대회 에어트랙을활용한운동상태변화측정의 시각화장치제작에관한탐구지도 출품분야지도논문출품부문학습용품 2005. 6.. 시 도 학교 ( 소속 ) 학년 ( 직위 ) 성 명 인천광역시인천과학고등학교교사김남두 지도학생인천과학고등학교 2 학년박태희 학교에서과학 ( 물리 ) 수업은흥미를유발시킬수있는실험보다는이론과문제풀이가위주로되어있어호기심을충족시키지못하고있다.
Delfino 실습장비 매뉴얼
 Delfino 실습장비매뉴얼 Rev. 1.0 목차 1. Delfino 실습장비소개... 2 2. 제품구성... 3 3. 주의사항... 5 프로세서모듈의탑재방향... 5 Delfino 실습장비의전원입력... 5 4. 회로블록및외관안내... 6 5. 사용방법... 10 Korea Tel. 031-781-2810 Fax. 031-706-2834 E-mail. [email protected]
Delfino 실습장비매뉴얼 Rev. 1.0 목차 1. Delfino 실습장비소개... 2 2. 제품구성... 3 3. 주의사항... 5 프로세서모듈의탑재방향... 5 Delfino 실습장비의전원입력... 5 4. 회로블록및외관안내... 6 5. 사용방법... 10 Korea Tel. 031-781-2810 Fax. 031-706-2834 E-mail. [email protected]
2009년2학기 임베디드시스템 응용
 임베디드시스템기초 (#514115 ) #2. GPIO & Matrix Keypad 한림대학교전자공학과이선우 Short Review #1 General Purpose Input Output (GPIO) Output port Input port Switch 사용방법 2 General Purpose Input Output(GPIO) port 모든 MCU의가장기본적이고중요한주변장치
임베디드시스템기초 (#514115 ) #2. GPIO & Matrix Keypad 한림대학교전자공학과이선우 Short Review #1 General Purpose Input Output (GPIO) Output port Input port Switch 사용방법 2 General Purpose Input Output(GPIO) port 모든 MCU의가장기본적이고중요한주변장치
슬라이드 1
 Delino EVM 용처음시작하기 - 프로젝트만들기 (85) Delfino EVM 처음시작하기앞서 이예제는타겟보드와개발홖경이반드시갖추어져있어야실습이가능합니다. 타겟보드 : Delfino EVM + TMS0F85 초소형모듈 개발소프트웨어 : Code Composer Studio 4 ( 이자료에서사용된버전은 v4..입니다. ) 하드웨어장비 : TI 정식 JTAG
Delino EVM 용처음시작하기 - 프로젝트만들기 (85) Delfino EVM 처음시작하기앞서 이예제는타겟보드와개발홖경이반드시갖추어져있어야실습이가능합니다. 타겟보드 : Delfino EVM + TMS0F85 초소형모듈 개발소프트웨어 : Code Composer Studio 4 ( 이자료에서사용된버전은 v4..입니다. ) 하드웨어장비 : TI 정식 JTAG
C 언어 프로그래밊 과제 풀이
 과제풀이 (1) 홀수 / 짝수판정 (1) /* 20094123 홍길동 20100324 */ /* even_or_odd.c */ /* 정수를입력받아홀수인지짝수인지판정하는프로그램 */ int number; printf(" 정수를입력하시오 => "); scanf("%d", &number); 확인 주석문 가필요한이유 printf 와 scanf 쌍
과제풀이 (1) 홀수 / 짝수판정 (1) /* 20094123 홍길동 20100324 */ /* even_or_odd.c */ /* 정수를입력받아홀수인지짝수인지판정하는프로그램 */ int number; printf(" 정수를입력하시오 => "); scanf("%d", &number); 확인 주석문 가필요한이유 printf 와 scanf 쌍
Section 03 트랜지스터를이용한스위칭동작 16/45 트랜지스터의직류특성 활성 직류상황에서전류 I C 는전류 I B 보다 h FE 배만큼더많은전류가흐름» 베이스와이미터가순방향으로바이어스» 컬렉터와베이스가역방향으로바이어스 차단 만일 I B 가 0[A] 이면컬렉터전류
![Section 03 트랜지스터를이용한스위칭동작 16/45 트랜지스터의직류특성 활성 직류상황에서전류 I C 는전류 I B 보다 h FE 배만큼더많은전류가흐름» 베이스와이미터가순방향으로바이어스» 컬렉터와베이스가역방향으로바이어스 차단 만일 I B 가 0[A] 이면컬렉터전류](/thumbs/89/99989809.jpg "Section 03 트랜지스터를이용한스위칭동작 16/45 트랜지스터의직류특성 활성 직류상황에서전류 I C 는전류 I B 보다 h FE 배만큼더많은전류가흐름» 베이스와이미터가순방향으로바이어스» 컬렉터와베이스가역방향으로바이어스 차단 만일 I B 가 0[A] 이면컬렉터전류") Section 03 트랜지스터를이용한스위칭동작 15/45 스위치 ON/OFF 의전기적특성 트랜지스터와기계적인스위치를이용한 LED ON/OFF 동작비교 LED 를켜기위한회로 ([ 그림 5-6]) Section 03 트랜지스터를이용한스위칭동작 16/45 트랜지스터의직류특성 활성 직류상황에서전류 I C 는전류 I B 보다 h FE 배만큼더많은전류가흐름» 베이스와이미터가순방향으로바이어스»
Section 03 트랜지스터를이용한스위칭동작 15/45 스위치 ON/OFF 의전기적특성 트랜지스터와기계적인스위치를이용한 LED ON/OFF 동작비교 LED 를켜기위한회로 ([ 그림 5-6]) Section 03 트랜지스터를이용한스위칭동작 16/45 트랜지스터의직류특성 활성 직류상황에서전류 I C 는전류 I B 보다 h FE 배만큼더많은전류가흐름» 베이스와이미터가순방향으로바이어스»
<4D F736F F F696E74202D20BBB7BBB7C7D15F FBEDFB0A3B1B3C0B05FC1A638C0CFC2F72E BC8A3C8AF20B8F0B5E55D>
 뻔뻔한 AVR 프로그래밍 The Last(8 th ) Lecture 유명환 ( [email protected]) INDEX 1 I 2 C 통신이야기 2 ATmega128 TWI(I 2 C) 구조분석 4 ATmega128 TWI(I 2 C) 실습 : AT24C16 1 I 2 C 통신이야기 I 2 C Inter IC Bus 어떤 IC들간에도공통적으로통할수있는 ex)
뻔뻔한 AVR 프로그래밍 The Last(8 th ) Lecture 유명환 ( [email protected]) INDEX 1 I 2 C 통신이야기 2 ATmega128 TWI(I 2 C) 구조분석 4 ATmega128 TWI(I 2 C) 실습 : AT24C16 1 I 2 C 통신이야기 I 2 C Inter IC Bus 어떤 IC들간에도공통적으로통할수있는 ex)
< E20C6DFBFFEBEEE20C0DBBCBAC0BB20C0A7C7D12043BEF0BEEE20492E707074>
 Chap #2 펌웨어작성을위한 C 언어 I http://www.smartdisplay.co.kr 강의계획 Chap1. 강의계획및디지털논리이론 Chap2. 펌웨어작성을위한 C 언어 I Chap3. 펌웨어작성을위한 C 언어 II Chap4. AT89S52 메모리구조 Chap5. SD-52 보드구성과코드메모리프로그래밍방법 Chap6. 어드레스디코딩 ( 매핑 ) 과어셈블리어코딩방법
Chap #2 펌웨어작성을위한 C 언어 I http://www.smartdisplay.co.kr 강의계획 Chap1. 강의계획및디지털논리이론 Chap2. 펌웨어작성을위한 C 언어 I Chap3. 펌웨어작성을위한 C 언어 II Chap4. AT89S52 메모리구조 Chap5. SD-52 보드구성과코드메모리프로그래밍방법 Chap6. 어드레스디코딩 ( 매핑 ) 과어셈블리어코딩방법

Microsoft PowerPoint - [2009] 02.pptx
![Microsoft PowerPoint - [2009] 02.pptx](/thumbs/86/93202615.jpg "Microsoft PowerPoint - [2009] 02.pptx") 원시데이터유형과연산 원시데이터유형과연산 원시데이터유형과연산 숫자데이터유형 - 숫자데이터유형 원시데이터유형과연산 표준입출력함수 - printf 문 가장기본적인출력함수. (stdio.h) 문법 ) printf( Test printf. a = %d \n, a); printf( %d, %f, %c \n, a, b, c); #include #include
원시데이터유형과연산 원시데이터유형과연산 원시데이터유형과연산 숫자데이터유형 - 숫자데이터유형 원시데이터유형과연산 표준입출력함수 - printf 문 가장기본적인출력함수. (stdio.h) 문법 ) printf( Test printf. a = %d \n, a); printf( %d, %f, %c \n, a, b, c); #include #include
Chap 6: Graphs
 AOV Network 의표현 임의의 vertex 가 predecessor 를갖는지조사 각 vertex 에대해 immediate predecessor 의수를나타내는 count field 저장 Vertex 와그에부속된모든 edge 들을삭제 AOV network 을인접리스트로표현 count link struct node { int vertex; struct node
AOV Network 의표현 임의의 vertex 가 predecessor 를갖는지조사 각 vertex 에대해 immediate predecessor 의수를나타내는 count field 저장 Vertex 와그에부속된모든 edge 들을삭제 AOV network 을인접리스트로표현 count link struct node { int vertex; struct node
금오공대 컴퓨터공학전공 강의자료
 C 프로그래밍프로젝트 Chap 14. 포인터와함수에대한이해 2013.10.09. 오병우 컴퓨터공학과 14-1 함수의인자로배열전달 기본적인인자의전달방식 값의복사에의한전달 val 10 a 10 11 Department of Computer Engineering 2 14-1 함수의인자로배열전달 배열의함수인자전달방식 배열이름 ( 배열주소, 포인터 ) 에의한전달 #include
C 프로그래밍프로젝트 Chap 14. 포인터와함수에대한이해 2013.10.09. 오병우 컴퓨터공학과 14-1 함수의인자로배열전달 기본적인인자의전달방식 값의복사에의한전달 val 10 a 10 11 Department of Computer Engineering 2 14-1 함수의인자로배열전달 배열의함수인자전달방식 배열이름 ( 배열주소, 포인터 ) 에의한전달 #include
실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
Chap 6: Graphs
 5. 작업네트워크 (Activity Networks) 작업 (Activity) 부분프로젝트 (divide and conquer) 각각의작업들이완료되어야전체프로젝트가성공적으로완료 두가지종류의네트워크 Activity on Vertex (AOV) Networks Activity on Edge (AOE) Networks 6 장. 그래프 (Page 1) 5.1 AOV
5. 작업네트워크 (Activity Networks) 작업 (Activity) 부분프로젝트 (divide and conquer) 각각의작업들이완료되어야전체프로젝트가성공적으로완료 두가지종류의네트워크 Activity on Vertex (AOV) Networks Activity on Edge (AOE) Networks 6 장. 그래프 (Page 1) 5.1 AOV
6_5상 스테핑 모터_ _OK.indd
 모델구성 적용모델 : 표준축형,, A 8K M 5 6 6 B Autonics motor 1: 은편축형만제공합니다. 2: Standard 결선방식은주문사양입니다. ( 단, 24각, A4K-G564(W), A8K-G566(W) 은제외입니다.) 모델구성 Q-42 모터형식 적용모델 : 기어드일체형,, 로터리액츄에이터형, 로터리액츄에이터 + A M 5 최대허용토크 모터상수
모델구성 적용모델 : 표준축형,, A 8K M 5 6 6 B Autonics motor 1: 은편축형만제공합니다. 2: Standard 결선방식은주문사양입니다. ( 단, 24각, A4K-G564(W), A8K-G566(W) 은제외입니다.) 모델구성 Q-42 모터형식 적용모델 : 기어드일체형,, 로터리액츄에이터형, 로터리액츄에이터 + A M 5 최대허용토크 모터상수
[ 마이크로프로세서 1] 2 주차 3 차시. 포인터와구조체 2 주차 3 차시포인터와구조체 학습목표 1. C 언어에서가장어려운포인터와구조체를설명할수있다. 2. Call By Value 와 Call By Reference 를구분할수있다. 학습내용 1 : 함수 (Functi
![[ 마이크로프로세서 1] 2 주차 3 차시. 포인터와구조체 2 주차 3 차시포인터와구조체 학습목표 1. C 언어에서가장어려운포인터와구조체를설명할수있다. 2. Call By Value 와 Call By Reference 를구분할수있다. 학습내용 1 : 함수 (Functi](/thumbs/100/144889077.jpg "[ 마이크로프로세서 1] 2 주차 3 차시. 포인터와구조체 2 주차 3 차시포인터와구조체 학습목표 1. C 언어에서가장어려운포인터와구조체를설명할수있다. 2. Call By Value 와 Call By Reference 를구분할수있다. 학습내용 1 : 함수 (Functi") 2 주차 3 차시포인터와구조체 학습목표 1. C 언어에서가장어려운포인터와구조체를설명할수있다. 2. Call By Value 와 Call By Reference 를구분할수있다. 학습내용 1 : 함수 (Function) 1. 함수의개념 입력에대해적절한출력을발생시켜주는것 내가 ( 프로그래머 ) 작성한명령문을연산, 처리, 실행해주는부분 ( 모듈 ) 자체적으로실행되지않으며,
2 주차 3 차시포인터와구조체 학습목표 1. C 언어에서가장어려운포인터와구조체를설명할수있다. 2. Call By Value 와 Call By Reference 를구분할수있다. 학습내용 1 : 함수 (Function) 1. 함수의개념 입력에대해적절한출력을발생시켜주는것 내가 ( 프로그래머 ) 작성한명령문을연산, 처리, 실행해주는부분 ( 모듈 ) 자체적으로실행되지않으며,
프로그래밍개론및실습 2015 년 2 학기프로그래밍개론및실습과목으로본내용은강의교재인생능출판사, 두근두근 C 언어수업, 천인국지음을발췌수정하였음
 프로그래밍개론및실습 2015 년 2 학기프로그래밍개론및실습과목으로본내용은강의교재인생능출판사, 두근두근 C 언어수업, 천인국지음을발췌수정하였음 CHAPTER 9 둘중하나선택하기 관계연산자 두개의피연산자를비교하는연산자 결과값은참 (1) 아니면거짓 (0) x == y x 와 y 의값이같은지비교한다. 관계연산자 연산자 의미 x == y x와 y가같은가? x!= y
프로그래밍개론및실습 2015 년 2 학기프로그래밍개론및실습과목으로본내용은강의교재인생능출판사, 두근두근 C 언어수업, 천인국지음을발췌수정하였음 CHAPTER 9 둘중하나선택하기 관계연산자 두개의피연산자를비교하는연산자 결과값은참 (1) 아니면거짓 (0) x == y x 와 y 의값이같은지비교한다. 관계연산자 연산자 의미 x == y x와 y가같은가? x!= y
슬라이드 1
 CCS v4 사용자안내서 CCSv4 사용자용예제따라하기안내 0. CCS v4.x 사용자 - 준비사항 예제에사용된 CCS 버전은 V4..3 버전이며, CCS 버전에따라메뉴화면이조금다를수있습니다. 예제실습전준비하기 처음시작하기예제모음집 CD 를 PC 의 CD-ROM 드라이브에삽입합니다. 아래안내에따라, 예제소스와헤더파일들을 PC 에설치합니다. CD 드라이브 \SW\TIDCS\TIDCS_DSP80x.exe
CCS v4 사용자안내서 CCSv4 사용자용예제따라하기안내 0. CCS v4.x 사용자 - 준비사항 예제에사용된 CCS 버전은 V4..3 버전이며, CCS 버전에따라메뉴화면이조금다를수있습니다. 예제실습전준비하기 처음시작하기예제모음집 CD 를 PC 의 CD-ROM 드라이브에삽입합니다. 아래안내에따라, 예제소스와헤더파일들을 PC 에설치합니다. CD 드라이브 \SW\TIDCS\TIDCS_DSP80x.exe
Microsoft PowerPoint - 3ÀÏ°_º¯¼ö¿Í »ó¼ö.ppt
 변수와상수 1 변수란무엇인가? 변수 : 정보 (data) 를저장하는컴퓨터내의특정위치 ( 임시저장공간 ) 메모리, register 메모리주소 101 번지 102 번지 변수의크기에따라 주로 byte 단위 메모리 2 기본적인변수형및변수의크기 변수의크기 해당컴퓨터에서는항상일정 컴퓨터마다다를수있음 short
변수와상수 1 변수란무엇인가? 변수 : 정보 (data) 를저장하는컴퓨터내의특정위치 ( 임시저장공간 ) 메모리, register 메모리주소 101 번지 102 번지 변수의크기에따라 주로 byte 단위 메모리 2 기본적인변수형및변수의크기 변수의크기 해당컴퓨터에서는항상일정 컴퓨터마다다를수있음 short
Microsoft PowerPoint - additional01.ppt [호환 모드]
![Microsoft PowerPoint - additional01.ppt [호환 모드]](/thumbs/90/102753799.jpg "Microsoft PowerPoint - additional01.ppt [호환 모드]") 1.C 기반의 C++ part 1 함수 오버로딩 (overloading) 디폴트매개변수 (default parameter) 인-라인함수 (in-line function) 이름공간 (namespace) Jong Hyuk Park 함수 Jong Hyuk Park 함수오버로딩 (overloading) 함수오버로딩 (function overloading) C++ 언어에서는같은이름을가진여러개의함수를정의가능
1.C 기반의 C++ part 1 함수 오버로딩 (overloading) 디폴트매개변수 (default parameter) 인-라인함수 (in-line function) 이름공간 (namespace) Jong Hyuk Park 함수 Jong Hyuk Park 함수오버로딩 (overloading) 함수오버로딩 (function overloading) C++ 언어에서는같은이름을가진여러개의함수를정의가능

PowerPoint 프레젠테이션
 Web server porting 2 Jo, Heeseung Web 을이용한 LED 제어 Web 을이용한 LED 제어프로그램 web 에서데이터를전송받아타겟보드의 LED 를조작하는프로그램을작성하기위해다음과같은소스파일을생성 2 Web 을이용한 LED 제어 LED 제어프로그램작성 8bitled.html 파일을작성 root@ubuntu:/working/web# vi
Web server porting 2 Jo, Heeseung Web 을이용한 LED 제어 Web 을이용한 LED 제어프로그램 web 에서데이터를전송받아타겟보드의 LED 를조작하는프로그램을작성하기위해다음과같은소스파일을생성 2 Web 을이용한 LED 제어 LED 제어프로그램작성 8bitled.html 파일을작성 root@ubuntu:/working/web# vi
Microsoft Word - PLC제어응용-2차시.doc
 과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
<322EBCF8C8AF28BFACBDC0B9AEC1A6292E687770>
 연습문제해답 5 4 3 2 1 0 함수의반환값 =15 5 4 3 2 1 0 함수의반환값 =95 10 7 4 1-2 함수의반환값 =3 1 2 3 4 5 연습문제해답 1. C 언어에서의배열에대하여다음중맞는것은? (1) 3차원이상의배열은불가능하다. (2) 배열의이름은포인터와같은역할을한다. (3) 배열의인덱스는 1에서부터시작한다. (4) 선언한다음, 실행도중에배열의크기를변경하는것이가능하다.
연습문제해답 5 4 3 2 1 0 함수의반환값 =15 5 4 3 2 1 0 함수의반환값 =95 10 7 4 1-2 함수의반환값 =3 1 2 3 4 5 연습문제해답 1. C 언어에서의배열에대하여다음중맞는것은? (1) 3차원이상의배열은불가능하다. (2) 배열의이름은포인터와같은역할을한다. (3) 배열의인덱스는 1에서부터시작한다. (4) 선언한다음, 실행도중에배열의크기를변경하는것이가능하다.
PowerPoint Presentation
 신호조절 (Signal Conditioning) 메카트로닉스 시스템의 구성 ECU 인터페이스 회로 (시그널 컨디셔닝) 마이컴 Model of 기계 시스템 인터페이스 회로 (드라이빙 회로) 센서 액츄에이터 (구동기) 기계 시스템 PN 접합 다이오드 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드 응용회로 [1] 다이오드
신호조절 (Signal Conditioning) 메카트로닉스 시스템의 구성 ECU 인터페이스 회로 (시그널 컨디셔닝) 마이컴 Model of 기계 시스템 인터페이스 회로 (드라이빙 회로) 센서 액츄에이터 (구동기) 기계 시스템 PN 접합 다이오드 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드 응용회로 [1] 다이오드
Microsoft Word - logic2005.doc
 제 8 장 Counters 실험의목표 - Catalog counter 의동작원리에대하여익힌다. - 임의의 counter를통하여 FSM 구현방법을익힌다. - 7-segment display 의동작원리를이해한다. 실험도움자료 1. 7-segment display 7-segment는디지털회로에서숫자를표시하기위하여가장많이사용하는소자이다. 이름에서알수있듯이 7개의 LED(
제 8 장 Counters 실험의목표 - Catalog counter 의동작원리에대하여익힌다. - 임의의 counter를통하여 FSM 구현방법을익힌다. - 7-segment display 의동작원리를이해한다. 실험도움자료 1. 7-segment display 7-segment는디지털회로에서숫자를표시하기위하여가장많이사용하는소자이다. 이름에서알수있듯이 7개의 LED(
Microsoft Word - DCMD-1000 사용자 메뉴얼.docx
 DCDM-1000(Ver.1.0 DC모터 드라이버 (DCMD-1000) 사용 설명서 V1.0 Last updated : March 6, 2014 1 / 10 DCDM-1000(Ver.1.0) 목차 1 소개 및 특징 1.1 소개 1.2 사양 1.3 특징 2 DC모터 드라이버(DCMD-1000) 사용법 2.1 전체결선도 2.2 Pin 설명 및 모드 설정 방법 2.3
DCDM-1000(Ver.1.0 DC모터 드라이버 (DCMD-1000) 사용 설명서 V1.0 Last updated : March 6, 2014 1 / 10 DCDM-1000(Ver.1.0) 목차 1 소개 및 특징 1.1 소개 1.2 사양 1.3 특징 2 DC모터 드라이버(DCMD-1000) 사용법 2.1 전체결선도 2.2 Pin 설명 및 모드 설정 방법 2.3
API 매뉴얼
 PCI-TC03 API Programming (Rev 1.0) Windows, Windows2000, Windows NT, Windows XP and Windows 7 are trademarks of Microsoft. We acknowledge that the trademarks or service names of all other organizations
PCI-TC03 API Programming (Rev 1.0) Windows, Windows2000, Windows NT, Windows XP and Windows 7 are trademarks of Microsoft. We acknowledge that the trademarks or service names of all other organizations
2 PX-8000과 RM-8000/LM-8000등의 관련 제품은 시스템의 간편한 설치와 쉬운 운영에 대한 고급 기술을 제공합니다. 또한 뛰어난 확장성으로 사용자가 요구하는 시스템을 손쉽게 구현할 수 있습니다. 메인컨트롤러인 PX-8000의 BGM입력소스를 8개의 로컬지
 PX-8000 SYSTEM 8 x 8 Audio Matrix with Local Control 2 PX-8000과 RM-8000/LM-8000등의 관련 제품은 시스템의 간편한 설치와 쉬운 운영에 대한 고급 기술을 제공합니다. 또한 뛰어난 확장성으로 사용자가 요구하는 시스템을 손쉽게 구현할 수 있습니다. 메인컨트롤러인 PX-8000의 BGM입력소스를 8개의 로컬지역에
PX-8000 SYSTEM 8 x 8 Audio Matrix with Local Control 2 PX-8000과 RM-8000/LM-8000등의 관련 제품은 시스템의 간편한 설치와 쉬운 운영에 대한 고급 기술을 제공합니다. 또한 뛰어난 확장성으로 사용자가 요구하는 시스템을 손쉽게 구현할 수 있습니다. 메인컨트롤러인 PX-8000의 BGM입력소스를 8개의 로컬지역에
C++-¿Ïº®Çؼ³10Àå
 C C++. (preprocessor directives), C C++ C/C++... C++, C. C++ C. C C++. C,, C++, C++., C++.,.. #define #elif #else #error #if #itdef #ifndef #include #line #pragma #undef #.,.,. #include #include
C C++. (preprocessor directives), C C++ C/C++... C++, C. C++ C. C C++. C,, C++, C++., C++.,.. #define #elif #else #error #if #itdef #ifndef #include #line #pragma #undef #.,.,. #include #include
CAN-fly Quick Manual
 adc-171 Manual Ver.1.0 2011.07.01 www.adc.co.kr 2 contents Contents 1. adc-171(rn-171 Pack) 개요 2. RN-171 Feature 3. adc-171 Connector 4. adc-171 Dimension 5. Schematic 6. Bill Of Materials 7. References
adc-171 Manual Ver.1.0 2011.07.01 www.adc.co.kr 2 contents Contents 1. adc-171(rn-171 Pack) 개요 2. RN-171 Feature 3. adc-171 Connector 4. adc-171 Dimension 5. Schematic 6. Bill Of Materials 7. References
PowerPoint 프레젠테이션
 Autodesk Software 개인용 ( 학생, 교사 ) 다운로드가이드 진동환 ([email protected]) Manager Autodesk Education Program - Korea Autodesk Education Expert 프로그램 www.autodesk.com/educationexperts 교육전문가프로그램 글로벌한네트워크 /
Autodesk Software 개인용 ( 학생, 교사 ) 다운로드가이드 진동환 ([email protected]) Manager Autodesk Education Program - Korea Autodesk Education Expert 프로그램 www.autodesk.com/educationexperts 교육전문가프로그램 글로벌한네트워크 /
 C 프로그래밍 언어 입문 C 프로그래밍 언어 입문 김명호저 숭실대학교 출판국 머리말..... C, C++, Java, Fortran, Python, Ruby,.. C. C 1972. 40 C.. C. 1999 C99. C99. C. C. C., kmh ssu.ac.kr.. ,. 2013 12 Contents 1장 프로그래밍 시작 1.1 C 10 1.2 12
C 프로그래밍 언어 입문 C 프로그래밍 언어 입문 김명호저 숭실대학교 출판국 머리말..... C, C++, Java, Fortran, Python, Ruby,.. C. C 1972. 40 C.. C. 1999 C99. C99. C. C. C., kmh ssu.ac.kr.. ,. 2013 12 Contents 1장 프로그래밍 시작 1.1 C 10 1.2 12
<BFACBDC0B9AEC1A6C7AEC0CC5F F E687770>
 IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
<443A5C4C C4B48555C B3E25C32C7D0B1E25CBCB3B0E8C7C1B7CEC1A7C6AE425CBED0C3E0C7C1B7CEB1D7B7A55C D616E2E637070>
 #include "stdafx.h" #include "Huffman.h" 1 /* 비트의부분을뽑아내는함수 */ unsigned HF::bits(unsigned x, int k, int j) return (x >> k) & ~(~0
#include "stdafx.h" #include "Huffman.h" 1 /* 비트의부분을뽑아내는함수 */ unsigned HF::bits(unsigned x, int k, int j) return (x >> k) & ~(~0
untitled
 Step Motor Device Driver Embedded System Lab. II Step Motor Step Motor Step Motor source Embedded System Lab. II 2 open loop, : : Pulse, 1 Pulse,, -, 1 +5%, step Step Motor (2),, Embedded System Lab. II
Step Motor Device Driver Embedded System Lab. II Step Motor Step Motor Step Motor source Embedded System Lab. II 2 open loop, : : Pulse, 1 Pulse,, -, 1 +5%, step Step Motor (2),, Embedded System Lab. II
Microsoft PowerPoint - SY-A3PSK-V1.pptx
 SY-A3PSK -V1.0 Low power Single chip, single voltage Nonvolatile, Reprogrammable Live at Power-up Live at Power up Maximum design security Firm-error immune Clock management Advanced I/O standards User
SY-A3PSK -V1.0 Low power Single chip, single voltage Nonvolatile, Reprogrammable Live at Power-up Live at Power up Maximum design security Firm-error immune Clock management Advanced I/O standards User
Chap 6: Graphs
 그래프표현법 인접행렬 (Adjacency Matrix) 인접리스트 (Adjacency List) 인접다중리스트 (Adjacency Multilist) 6 장. 그래프 (Page ) 인접행렬 (Adjacency Matrix) n 개의 vertex 를갖는그래프 G 의인접행렬의구성 A[n][n] (u, v) E(G) 이면, A[u][v] = Otherwise, A[u][v]
그래프표현법 인접행렬 (Adjacency Matrix) 인접리스트 (Adjacency List) 인접다중리스트 (Adjacency Multilist) 6 장. 그래프 (Page ) 인접행렬 (Adjacency Matrix) n 개의 vertex 를갖는그래프 G 의인접행렬의구성 A[n][n] (u, v) E(G) 이면, A[u][v] = Otherwise, A[u][v]
Microsoft PowerPoint - 제11장 포인터(강의)
") 쉽게풀어쓴 C 언어 Express 제 11 장포인터 이번장에서학습할내용 포인터이란? 변수의주소 포인터의선언 간접참조연산자 포인터연산 포인터와배열 포인터와함수 이번장에서는포인터의기초적인지식을학습한다. 포인터란? 포인터 (pointer): 주소를가지고있는변수 1003 1004 1005 영화관 1002 1006 1001 포인터 (pointer) 1007 메모리의구조
쉽게풀어쓴 C 언어 Express 제 11 장포인터 이번장에서학습할내용 포인터이란? 변수의주소 포인터의선언 간접참조연산자 포인터연산 포인터와배열 포인터와함수 이번장에서는포인터의기초적인지식을학습한다. 포인터란? 포인터 (pointer): 주소를가지고있는변수 1003 1004 1005 영화관 1002 1006 1001 포인터 (pointer) 1007 메모리의구조
슬라이드 1
 / 유닉스시스템개요 / 파일 / 프로세스 01 File Descriptor file file descriptor file type unix 에서의파일은단지바이트들의나열임 operating system 은파일에어떤포맷도부과하지않음 파일의내용은바이트단위로주소를줄수있음 file descriptor 는 0 이나양수임 file 은 open 이나 creat 로 file
/ 유닉스시스템개요 / 파일 / 프로세스 01 File Descriptor file file descriptor file type unix 에서의파일은단지바이트들의나열임 operating system 은파일에어떤포맷도부과하지않음 파일의내용은바이트단위로주소를줄수있음 file descriptor 는 0 이나양수임 file 은 open 이나 creat 로 file
iii. Design Tab 을 Click 하여 WindowBuilder 가자동으로생성한 GUI 프로그래밍환경을확인한다.
 Eclipse 개발환경에서 WindowBuilder 를이용한 Java 프로그램개발 이예는 Java 프로그램의기초를이해하고있는사람을대상으로 Embedded Microcomputer 를이용한제어시스템을 PC 에서 Serial 통신으로제어 (Graphical User Interface (GUI) 환경에서 ) 하는프로그램개발예를설명한다. WindowBuilder:
Eclipse 개발환경에서 WindowBuilder 를이용한 Java 프로그램개발 이예는 Java 프로그램의기초를이해하고있는사람을대상으로 Embedded Microcomputer 를이용한제어시스템을 PC 에서 Serial 통신으로제어 (Graphical User Interface (GUI) 환경에서 ) 하는프로그램개발예를설명한다. WindowBuilder:
PowerPoint 프레젠테이션
 Verilog: Finite State Machines CSED311 Lab03 Joonsung Kim, [email protected] Finite State Machines Digital system design 시간에배운것과같습니다. Moore / Mealy machines Verilog 를이용해서어떻게구현할까? 2 Finite State
Verilog: Finite State Machines CSED311 Lab03 Joonsung Kim, [email protected] Finite State Machines Digital system design 시간에배운것과같습니다. Moore / Mealy machines Verilog 를이용해서어떻게구현할까? 2 Finite State
목차 윈도우드라이버 1. 매뉴얼안내 운영체제 (OS) 환경 윈도우드라이버준비 윈도우드라이버설치 Windows XP/Server 2003 에서설치 Serial 또는 Parallel 포트의경우.
 환경 윈도우드라이버준비 윈도우드라이버설치 Windows XP/Server 2003 에서설치 Serial 또는 Parallel 포트의경우.") 소프트웨어매뉴얼 윈도우드라이버 Rev. 3.03 SLP-TX220 / TX223 SLP-TX420 / TX423 SLP-TX400 / TX403 SLP-DX220 / DX223 SLP-DX420 / DX423 SLP-DL410 / DL413 SLP-T400 / T403 SLP-T400R / T403R SLP-D220 / D223 SLP-D420 / D423
소프트웨어매뉴얼 윈도우드라이버 Rev. 3.03 SLP-TX220 / TX223 SLP-TX420 / TX423 SLP-TX400 / TX403 SLP-DX220 / DX223 SLP-DX420 / DX423 SLP-DL410 / DL413 SLP-T400 / T403 SLP-T400R / T403R SLP-D220 / D223 SLP-D420 / D423
ATmega128
 ATmega128 외부인터럽트실습 Prof. Jae Young Choi ( 최재영교수 ) (2015 Spring) Prof. Jae Young Choi 외부인터럽트실험 외부인터럽트를사용하기위해관렦레지스터를설정 일반적으로 I/O 포트에대한설정이끝난후에외부인터럽트나타이머 / 카운터설정 PE4~7 번까지 4 개의외부인터럽트 INT4~INT7 까지사용 외부인터럽트사용법요약
ATmega128 외부인터럽트실습 Prof. Jae Young Choi ( 최재영교수 ) (2015 Spring) Prof. Jae Young Choi 외부인터럽트실험 외부인터럽트를사용하기위해관렦레지스터를설정 일반적으로 I/O 포트에대한설정이끝난후에외부인터럽트나타이머 / 카운터설정 PE4~7 번까지 4 개의외부인터럽트 INT4~INT7 까지사용 외부인터럽트사용법요약
Microsoft PowerPoint - 제11장 포인터
 쉽게풀어쓴 C 언어 Express 제 11 장포인터 이번장에서학습할내용 포인터이란? 변수의주소 포인터의선언 간접참조연산자 포인터연산 포인터와배열 포인터와함수 이번장에서는포인터의기초적인지식을학습한다. 포인터란? 포인터 (pointer): 주소를가지고있는변수 1003 1004 1005 영화관 1002 1006 1001 포인터 (pointer) 1007 메모리의구조
쉽게풀어쓴 C 언어 Express 제 11 장포인터 이번장에서학습할내용 포인터이란? 변수의주소 포인터의선언 간접참조연산자 포인터연산 포인터와배열 포인터와함수 이번장에서는포인터의기초적인지식을학습한다. 포인터란? 포인터 (pointer): 주소를가지고있는변수 1003 1004 1005 영화관 1002 1006 1001 포인터 (pointer) 1007 메모리의구조
<4D F736F F F696E74202D20B8B6C0CCC5A9B7CEC7C1B7CEBCBCBCAD202834C1D6C2F7207E2038C1D6C2F729>
 7주차 AVR의 A/D 변환기제어레지스터및관련실습 Next-Generation Networks Lab. 3. 관련레지스터 표 9-4 레지스터 ADMUX ADCSRA ADCH ADCL 설명 ADC Multiplexer Selection Register ADC 의입력채널선택및기준전압선택외 ADC Control and Status Register A ADC 의동작을설정하거나동작상태를표시함
7주차 AVR의 A/D 변환기제어레지스터및관련실습 Next-Generation Networks Lab. 3. 관련레지스터 표 9-4 레지스터 ADMUX ADCSRA ADCH ADCL 설명 ADC Multiplexer Selection Register ADC 의입력채널선택및기준전압선택외 ADC Control and Status Register A ADC 의동작을설정하거나동작상태를표시함
프로그램을 학교 등지에서 조금이라도 배운 사람들을 위한 프로그래밍 노트 입니다. 저 역시 그 사람들 중 하나 입니다. 중고등학교 시절 학교 도서관, 새로 생긴 시립 도서관 등을 다니며 책을 보 고 정리하며 어느정도 독학으르 공부하긴 했지만, 자주 안하다 보면 금방 잊어
 개나리 연구소 C 언어 노트 (tyback.egloos.com) 프로그램을 학교 등지에서 조금이라도 배운 사람들을 위한 프로그래밍 노트 입니다. 저 역시 그 사람들 중 하나 입니다. 중고등학교 시절 학교 도서관, 새로 생긴 시립 도서관 등을 다니며 책을 보 고 정리하며 어느정도 독학으르 공부하긴 했지만, 자주 안하다 보면 금방 잊어먹고 하더라구요. 그래서,
개나리 연구소 C 언어 노트 (tyback.egloos.com) 프로그램을 학교 등지에서 조금이라도 배운 사람들을 위한 프로그래밍 노트 입니다. 저 역시 그 사람들 중 하나 입니다. 중고등학교 시절 학교 도서관, 새로 생긴 시립 도서관 등을 다니며 책을 보 고 정리하며 어느정도 독학으르 공부하긴 했지만, 자주 안하다 보면 금방 잊어먹고 하더라구요. 그래서,
Microsoft Word - AM-GYRO-P V02 메뉴얼.doc
 2 축자이로센서플러스모듈 ( Model : AM-GYRO-P ) 메뉴얼 뉴티씨 (NEWTC) 1 AM-GYRO-P 소개 2축자이로 ( 각속도 ) 센서 (InvenSense사의 IDG-650/IXZ-650) 를이용한 Evaluation 보드 출력신호에 Low Pass Filter ( 약 2kHz) 구현 AM-GYRO 모듈과 AVR 보드와연결하여테스트할수있는보드입니다.
2 축자이로센서플러스모듈 ( Model : AM-GYRO-P ) 메뉴얼 뉴티씨 (NEWTC) 1 AM-GYRO-P 소개 2축자이로 ( 각속도 ) 센서 (InvenSense사의 IDG-650/IXZ-650) 를이용한 Evaluation 보드 출력신호에 Low Pass Filter ( 약 2kHz) 구현 AM-GYRO 모듈과 AVR 보드와연결하여테스트할수있는보드입니다.
11장 포인터
 Dynamic Memory and Linked List 1 동적할당메모리의개념 프로그램이메모리를할당받는방법 정적 (static) 동적 (dynamic) 정적메모리할당 프로그램이시작되기전에미리정해진크기의메모리를할당받는것 메모리의크기는프로그램이시작하기전에결정 int i, j; int buffer[80]; char name[] = data structure"; 처음에결정된크기보다더큰입력이들어온다면처리하지못함
Dynamic Memory and Linked List 1 동적할당메모리의개념 프로그램이메모리를할당받는방법 정적 (static) 동적 (dynamic) 정적메모리할당 프로그램이시작되기전에미리정해진크기의메모리를할당받는것 메모리의크기는프로그램이시작하기전에결정 int i, j; int buffer[80]; char name[] = data structure"; 처음에결정된크기보다더큰입력이들어온다면처리하지못함
0. 표지에이름과학번을적으시오. (6) 1. 변수 x, y 가 integer type 이라가정하고다음빈칸에 x 와 y 의계산결과값을적으시오. (5) x = (3 + 7) * 6; x = 60 x = (12 + 6) / 2 * 3; x = 27 x = 3 * (8 / 4
 1. 변수 x, y 가 integer type 이라가정하고다음빈칸에 x 와 y 의계산결과값을적으시오. (5) x = (3 + 7) * 6; x = 60 x = (12 + 6) / 2 * 3; x = 27 x = 3 * (8 / 4") Introduction to software design 2012-1 Final 2012.06.13 16:00-18:00 Student ID: Name: - 1 - 0. 표지에이름과학번을적으시오. (6) 1. 변수 x, y 가 integer type 이라가정하고다음빈칸에 x 와 y 의계산결과값을적으시오. (5) x = (3 + 7) * 6; x = 60 x
Introduction to software design 2012-1 Final 2012.06.13 16:00-18:00 Student ID: Name: - 1 - 0. 표지에이름과학번을적으시오. (6) 1. 변수 x, y 가 integer type 이라가정하고다음빈칸에 x 와 y 의계산결과값을적으시오. (5) x = (3 + 7) * 6; x = 60 x
1장. 유닉스 시스템 프로그래밍 개요
 Unix 프로그래밍및실습 7 장. 시그널 - 과제보충 응용과제 1 부모프로세스는반복해서메뉴를출력하고사용자로부터주문을받아자식프로세스에게주문내용을알린다. (SIGUSR1) ( 일단주문을받으면음식이완료되기전까지 SIGUSR1 을제외한다른시그널은모두무시 ) timer 자식프로세스는주문을받으면조리를시작한다. ( 일단조리를시작하면음식이완성되기전까지 SIGALARM 을제외한다른시그널은모두무시
Unix 프로그래밍및실습 7 장. 시그널 - 과제보충 응용과제 1 부모프로세스는반복해서메뉴를출력하고사용자로부터주문을받아자식프로세스에게주문내용을알린다. (SIGUSR1) ( 일단주문을받으면음식이완료되기전까지 SIGUSR1 을제외한다른시그널은모두무시 ) timer 자식프로세스는주문을받으면조리를시작한다. ( 일단조리를시작하면음식이완성되기전까지 SIGALARM 을제외한다른시그널은모두무시
Microsoft PowerPoint - C프로그래밍-chap03.ppt [호환 모드]
![Microsoft PowerPoint - C프로그래밍-chap03.ppt [호환 모드]](/thumbs/97/133437227.jpg "Microsoft PowerPoint - C프로그래밍-chap03.ppt [호환 모드]") Chapter 03 변수와자료형 2009 한국항공대학교항공우주기계공학부 (http://mercury.kau.ac.kr/sjkwon) 1 변수와자료유형 변수 프로그램에서자료값을임시로기억할수있는저장공간을변수 (variables) 변수 (Variables) 는컴퓨터의메모리인 RAM(Random Access Memory) 에저장 물건을담는박스라고생각한다면박스의크기에따라담을물건이제한됨
Chapter 03 변수와자료형 2009 한국항공대학교항공우주기계공학부 (http://mercury.kau.ac.kr/sjkwon) 1 변수와자료유형 변수 프로그램에서자료값을임시로기억할수있는저장공간을변수 (variables) 변수 (Variables) 는컴퓨터의메모리인 RAM(Random Access Memory) 에저장 물건을담는박스라고생각한다면박스의크기에따라담을물건이제한됨
금오공대 컴퓨터공학전공 강의자료
 C 프로그래밍프로젝트 Chap 13. 포인터와배열! 함께이해하기 2013.10.02. 오병우 컴퓨터공학과 13-1 포인터와배열의관계 Programming in C, 정재은저, 사이텍미디어. 9 장참조 ( 교재의 13-1 은읽지말것 ) 배열이름의정체 배열이름은 Compile 시의 Symbol 로서첫번째요소의주소값을나타낸다. Symbol 로서컴파일시에만유효함 실행시에는메모리에잡히지않음
C 프로그래밍프로젝트 Chap 13. 포인터와배열! 함께이해하기 2013.10.02. 오병우 컴퓨터공학과 13-1 포인터와배열의관계 Programming in C, 정재은저, 사이텍미디어. 9 장참조 ( 교재의 13-1 은읽지말것 ) 배열이름의정체 배열이름은 Compile 시의 Symbol 로서첫번째요소의주소값을나타낸다. Symbol 로서컴파일시에만유효함 실행시에는메모리에잡히지않음
Flowchart 작성법
 Flowchart 작성법 Flowchart 란? Algorithm 어떤문제를해결하기위해수행할작업을순서대로파악해서, 그순서에따라해결방법을결정하는방법 수학의문제해결방법으로사용할뿐만이아니라일상생활과일의경우에도무의식적으로사용 Flowchart Algorithm 을정해진기호를이용한그림으로표시하여시각적으로표현한것 2 Flowchart 란? Program Flowchart
Flowchart 작성법 Flowchart 란? Algorithm 어떤문제를해결하기위해수행할작업을순서대로파악해서, 그순서에따라해결방법을결정하는방법 수학의문제해결방법으로사용할뿐만이아니라일상생활과일의경우에도무의식적으로사용 Flowchart Algorithm 을정해진기호를이용한그림으로표시하여시각적으로표현한것 2 Flowchart 란? Program Flowchart
1. 구성품 - TMS320F280x 소켓모듈 - 몰렉스 2 핀전원케이블 mm 간격의 2x20 핀해더 - PCB 지지대 2. 주의사항 - 입력전압 : 5V 전류눈금이나와있는파워서플라이를권장 모듈의전원이공급상태에서, 소켓이열리지않도록주의해주시고 모든정전기를배제
 TMS320C2000 DSP Module Series 싱크웍스 TMS320F280X 소켓모듈 Rev 1.0 ( 우 ) 463-839 경기도성남시분당구야탑동 513-2 상우빌딩 3 층싱크웍스 Te l. 0 3 1-781- 2 8 1 0 F a x. 0 3 1-7 0 6-2 8 3 4 E - m a i l. d s p t o o l s @ s y n c w o
TMS320C2000 DSP Module Series 싱크웍스 TMS320F280X 소켓모듈 Rev 1.0 ( 우 ) 463-839 경기도성남시분당구야탑동 513-2 상우빌딩 3 층싱크웍스 Te l. 0 3 1-781- 2 8 1 0 F a x. 0 3 1-7 0 6-2 8 3 4 E - m a i l. d s p t o o l s @ s y n c w o
<4D F736F F D C6AFBAB0BACEB7CF2D322E204D4F544F52C8B8C0FC20BCD3B5B520C3F8C1A420B9E6B9FD20B1B8C7F62E444F43>
 * 모터회전속도측정 *. 엔코더모터의회전속도제어를위해서속도의측정이필요. 속도센서로는일반적으로 Incremental 엔코더를많이사용함. 전원 Motor 엔코더 신호출력 A 상 B 상 엔코더의신호출력방식 : Open Collector 와 Line Driver 방식이많이사용됨. 엔코더의회전당펄스수 (PPR): 60,500,5,600,000,04,000,048,4000,4096,8000,89
* 모터회전속도측정 *. 엔코더모터의회전속도제어를위해서속도의측정이필요. 속도센서로는일반적으로 Incremental 엔코더를많이사용함. 전원 Motor 엔코더 신호출력 A 상 B 상 엔코더의신호출력방식 : Open Collector 와 Line Driver 방식이많이사용됨. 엔코더의회전당펄스수 (PPR): 60,500,5,600,000,04,000,048,4000,4096,8000,89