A. 학술부문 1. 설계개념및형상설계 (1) 설계목표 < 융합을통한결과물도출 > 저희뉴비팀은기계공학, 디자인공학, 산업디자인, 전자시스템등의다양한전공의학생들로구성이되어있습니다. 각자의전공분야에맞게자신의포지션에서현실적인신비차를제작함을목표로두고있습니다. < 이륙공간의최소화
|
|
|
- 남주 화
- 6 years ago
- Views:
Transcription
1 A. 학술부문 1. 설계개념및형상설계 (1) 설계목표 < 융합을통한결과물도출 > 저희뉴비팀은기계공학, 디자인공학, 산업디자인, 전자시스템등의다양한전공의학생들로구성이되어있습니다. 각자의전공분야에맞게자신의포지션에서현실적인신비차를제작함을목표로두고있습니다. < 이륙공간의최소화 (VTOL)> 미래에우리나라의도로는현자동차보급률을보았을때개인용자동차로포화상태가될것입니다. 하지만신비차의등장으로그혼란은많이줄어들예정입니다. 현재비행기들은 CTOL의형태를띠고있습니다. 이는이 착륙시활주로를포함한많은공간을요구합니다. 이러한이유로 VTOL 형태의신비차가더욱효과적인미래신비차의모습이라는예상을하게되었습니다. <BI-COPTER> 작년에제 4회국제신비차대회에참관했습니다. 정말훌륭한비행체들이많았지만그비행체들의문제는현재상용화되어있는쿼드콥터또는헥사콥터, x8콥터등미래의자동차라기보다멀티콥터를 RC자동차위에올려놓았다는느낌이큽니다. 물론미래의자동차가실제로그런형상을띄고있을수도있습니다. 하지만공간활용도면에서트라이콥터이상의기체는현실화되기어렵다고느꼈습니다. 저희팀은 bi-copter의로터방식을응용하여실제상용화할수있는디자인구현을목표로했습니다. <transform을통한최적화설계 > 신비차의주용도는비행과운전에있습니다. 하지만비행을하기위한형태와운전을위한형태가동일하다면공간상의측면과역학적인움직임측면에서손실이매우크다는판단을하였습니다. 따라서자동차로서의형태는오로지자동차의주행을위해서, 비행을위한형태는비행에최적화된설계를함을목표로생각하고있습니다. 현재자동차인프라에적합하며비행기로서제역할을하기위해저희팀은트랜스폼을생각하고있습니다. 접혀있는날개와로터, 그리고테일부가비행시제위치를찾는형식을생각하고있습니다. < 효율적인공간설계 > 저희가대회를위해제작할차량은축소설계할차량입니다. 비록작게제작하는차량이지만저희팀은제대로차량을축소해야한다고생각합니다. 축소한만큼더욱세밀하고정교하게설계해실제차량을예상되게해야한다고생각합니다. 실제사람 ( 인형 ) 의행동패턴을고려한공간설계를목표로하고있습니다. < 기체의견고성및안전성 > 무엇보다자동차와비행기에서중요한건조종자의안전입니다. 그러므로기체의프레임은웬만한충격에도버텨야합니다. 가볍고강한재료를사용함과더불어구조역학적인설계를통하여가볍고튼튼한기체를만듦을목표로하고있습니다. 저희 - 1 -
2 기체는두개의강력한모터를이용한트윈로터를쓸예정입니다. 로터는작고강한서보모터의힘으로작동할것입니다. 적어도 5kgf.cm정도의토크를지닌서보모터의비틀림힘을견디어더욱세밀한제어가가능하도록설계할예정입니다. 탑승객들은아무리값이저렴하다해도프로펠러비행기에대해선반신반의하는분위기가강합니다. 그이유는안전성면에서탐탁치못하다는이유입니다. < 안정적인비행 > 비행기로써당연한목표입니다. 안정적인주행과비행을위하여자이로, 고도를위한기압센서, 가속도센서, 지자기센서를이용하여부드럽고안정적인주행을목표로하고있습니다. 또한 gps를이용한자동주행을준비하고있습니다. < 안정된착륙및모드변환 > 비행시안전사고가제일많이날때는착륙을할때로서, 그만큼위험하고신중해야하는때입니다. 만약모드변환이자유롭지못하다면탑승자의편리성을무시하는행위라고생각합니다. 미래에는버튼하나로안전한자동착륙시스템이구축될것으로보입니다. 이점을생각해모드변환이자유로울수있도록설계하고자합니다. < 자연친화적인연료 > 석유자원의고갈문제와대기오염으로인한전세계의연비규제가점점심해지고있습니다. 이에현재전기에너지를이용한자동차가주목을받고있습니다. 많은자동차업체에서이미하이브리드카를비롯하여연료전지등의형태를띤전기에너지를이용한자동차개발에힘쓰고있습니다. 이러한움직임은앞으로자동차뿐만아니라모든운송수단에적용될것입니다. 그래서저희는전기에너지를활용한 PAV를설계하고자합니다. (2) 디자인의미하늘을나는자동차를디자인함에있어서가장큰주안점은주행과비행의모드를구분하여변형이되는디자인인데, 그두가지모드가각각신경써야할부분이생깁니다. 주행모드일때는기존도로에서주행이가능하도록차량의큰실루엣을벗어나지않게끔하였고, 비행모드일때는공중에뜨는데있어서안정적인형태를취하는것을최우선으로생각하였습니다. 수많은하늘을날게해줄장치중바이콥터를선택한이유는, 위의이유를들수있습니다. 프로펠러를접을수있을때가장자동차의형상을유지할수있어, 기존자동차의인프라들을활용하기에적합하기때문입니다
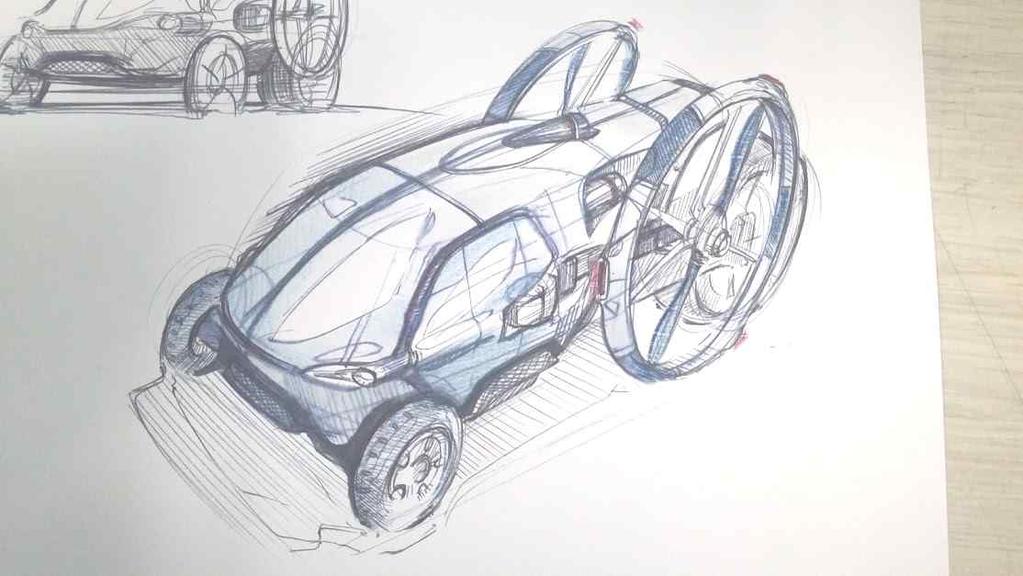
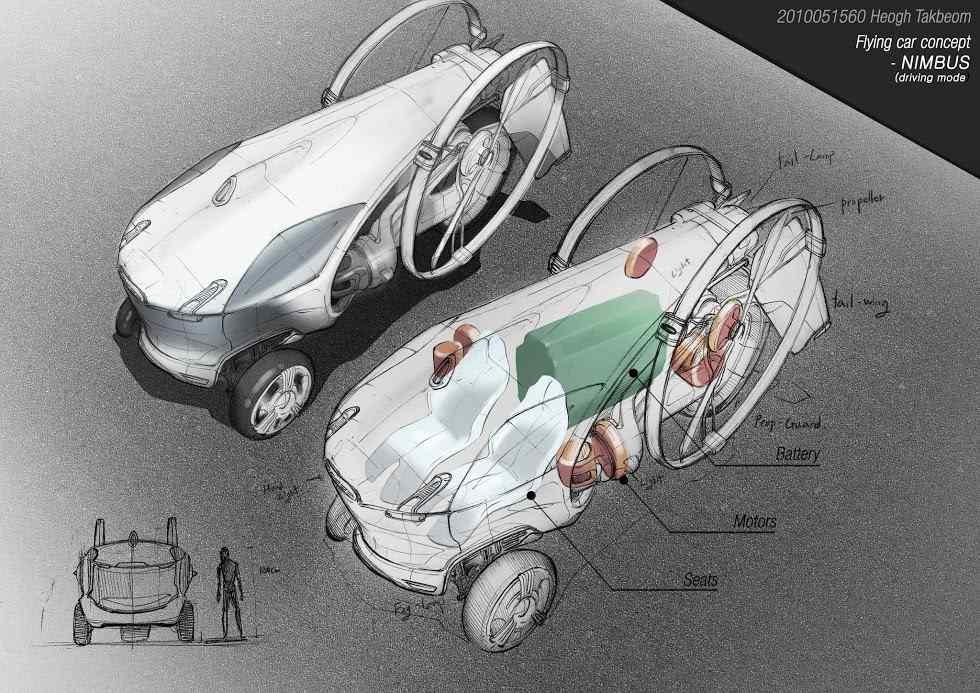

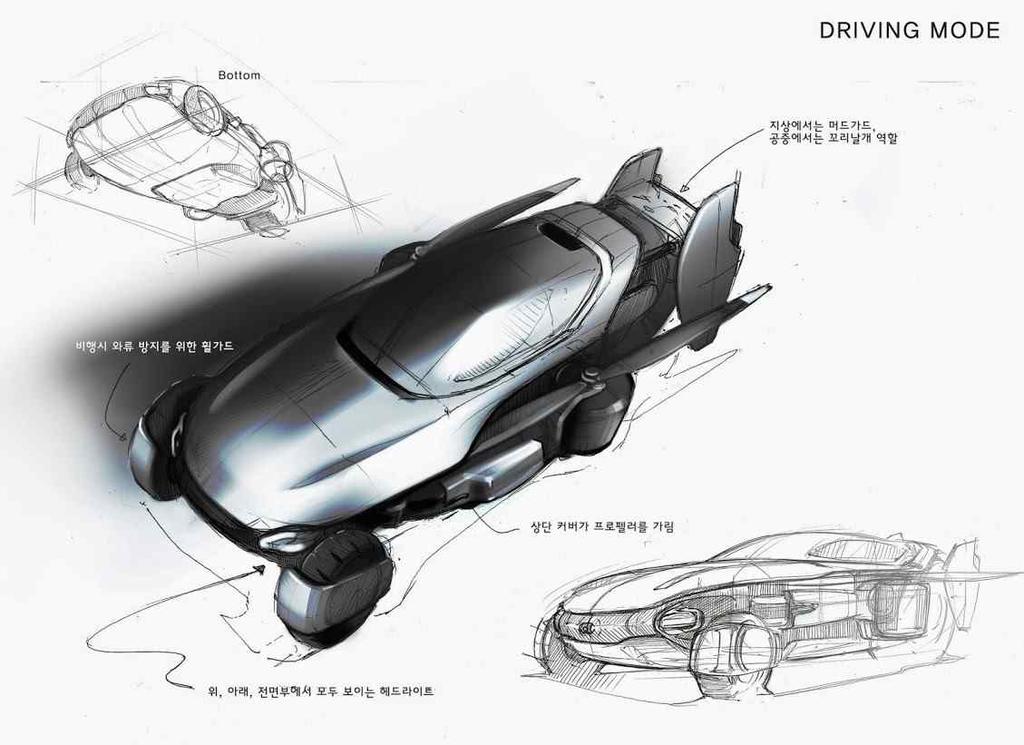
3 (3) 외형설계외형설계는전체적인신비차디자인의콘셉트를결정해줍니다. 공학도와디자인학도로이루어진저희뉴비팀은수차례의회의를거쳐더욱안정적이고현실적인기체를제작하고자합니다. 다음은저희팀의기체 님부스 의외형변화입니다. 1차디자인시안입니다. 2014년초에합류한디자인학과허탁범학생의초기시안입니다. 차량앞쪽에위치한콕핏 ( 실내공간 ) 에서는넓은시야를가질수있습니다. 두차례폴딩된두개의프로펠러는차량으로서의주행성을향상시킬것입니다. 전체적인형상은유선형을이루고있어비행시공기저항을최소화시킵니다. 2 차디자인시안입니다. 운전자의공간을더욱디테일하게표현했습니다. 프로펠러 부를펼쳤을때의형상입니다. 3차디자인시안입니다. 저희의신비차량님부스는기본적인형태를유지하면서인간공학적이고근미래의차량에접근하고있습니다. 차량사고및비행안전성을위해기존자동차처럼운전석을본넷뒤로배치하였고, 본넷안쪽으로부품중가장무게가많이나가는배터리를배치하여무게중심을조절하였습니다. 꼬리날개는 H형을취하고있는데주행시에는흙받이역할을하게하여, 낭비되는자원을최소화하였습니다
 공력및추력특성추력테스트를위해추력을측정가능한장치를직접만들었습니다. 측정을위한장치는조종기의트랜스미터기능을이용했습니다.")

4 균형잡힌설계및운전자탑승공간에대한고려도하였습니다. 먼저일반인들을대상으로진행한설문조사를분석한결과, 운전석이뒤쪽에있는디자인을더선호하는것으로드러났고, 최소 2인이상의탑승공간을확보해야하는니즈를알게되었습니다. 저희는이러한니즈를충족시키면서, 구성된부품을가장효과적으로배치하였습니다. 2. 성능및안정성 / 조종성해석 (1) 공력및추력특성추력테스트를위해추력을측정가능한장치를직접만들었습니다. 측정을위한장치는조종기의트랜스미터기능을이용했습니다. 현재쓰고있는 Graupner MZ-24 조종기는같은회사의수신기를사용할경우 RPM, 모터온도, 전압, 그리고전류를측정할수있습니다. 기체에사용할모터는 E-MAX사의 GT 로정하였습니다. 그기준은제조사에서제공하는모터의스펙을참고하였습니다. 다음은제조사에서제공해주는모터의스펙입니다. 모터의추력테스트를위해사용한프로펠러는 2 가지종류입니다. 제조사에서추천하 는프로펠러사이즈의제품들을더욱광범위하게체크해보고싶었지만금전적인이유 로아래의두가지프로펠러를선택했습니다



 실험은각각의프로펠러를사용하여 5 회씩진행했습니다.")
5 1. Dualsky 22 7 Wooden Propeller 2. TAROT T Series Propeller 제작할기체의예상하중은대략 13kg입니다. 호버링에필요한추력을 13kg으로가정할시모터당호버링시필요한추력은 6~7kg입니다. 따라서모터당 max추력은 13kg이라는결론을얻었습니다. 그로인해서가격과성능을절충하여모터는 EMAX 회사의 GT 를채택하였습니다. 프로펠러는 EMAX에서제공하는모터제원표를참조하여 24인치와 22인치로선정하였습니다. ( 모터테스트영상 실험은각각의프로펠러를사용하여 5 회씩진행했습니다. Dualsky 22 7 프로펠러 Tarot 이데이터를바탕으로기체에사용할모터의추력은우리의예상과거의일치하였고, ESC 에흐를전류와전압의안정성과모터최대출력을고려해서 22 인치프로펠러를 사용하기로결정했습니다

6 (2) 주행 / 비행성능해석 1. 주행성능해석 주행은바퀴의구름운동의크기에비례해서그성능이좌지우지되므로, 기본적인 토크에대한계산이우선이되어야합니다. 기본적인토크의계산공식은아래와같 습니다. 모터를선정하는데에제일주안점으로두어야할것은볼트당 RPM 즉모터자체 의kV와모터가먹는전력인kW를주안점으로두어야합니다. 그이유는모터가낼 수있는최대의토크값을구하는데있습니다. RPM 을구하는식은, 전 력을구하는식은 입니다. 위의계산은기존에있는모터의성능을위에있는공식과수식으로데이터를산출 하여, 본기체에적합한모터를선정하는데있습니다. 그렇다면본기체에적합한모터를계산하는방법은무엇이있을까? 우선차량의중량과타이어의크기를알아야합니다. 우리조의기체는뒷바퀴내에 존재하는모터로구동하는인휠방식을구동방식으로채택하였습니다. 중량과타이어 의반경을알고위의공식을이용하면기체가필요한토크를알수있습니다. 모터에축이직접연결되어구동되지않고기어를이용한차량의특성상기어비를 알아야최소토크를알수있습니다. 최소토크는아래의공식을이용합니다

 이용동력 ] 식을이용하여구하면됩니다. 모터출력을구하는식은다음과같으며 P=f*v, 이를이용한속도의식은다음과같습니다. P/f =v 잉여동력을이용한속도를구하는식은다음과같습니다.")
7 여기서구한최소토크에안전계수를약 1.5~2정도놓고곱해주면, 기체를움직이면서변속기에무리가가지않는필요토크를구할수있습니다. 이를이용해계산한우리의기체의필요데이터는다음과같습니다. 위의계산된데이터를기반으로선정된모터 FLUX TORK 2200Kv BRUSHLESS MOTOR의토크를계산을했습니다. 또한이데이터를바탕으로본체에적합하다는판단을하였습니다. 2. 비행성능해석모터테스트결과모터하나당추력이 6.5kg될경우호버링이가능한것을확인하였습니다. 그때의모터출력값이 W입니다. 확인한모터출력값을이용해속도를구했습니다. (1) 수평정상비행성능 < 정상자세일때의모터 > < 비행시모터 > 위에있는사진을참고로비행시틸팅의각도가 θ 일경우에수직힘과수평힘을나눠야하는데, 이를구하는공식은 Vertical Force(N) =Fcosθ, Horizontal Force(N)=Fsinθ 와같습니다. 그리고또다른필요조건인잉여동력은 [ 잉여동력 = 모터출력-호버링 ( 수식 ) 이용동력 ] 식을이용하여구하면됩니다. 모터출력을구하는식은다음과같으며 P=f*v, 이를이용한속도의식은다음과같습니다. P/f =v 잉여동력을이용한속도를구하는식은다음과같습니다. 잉여동력 / 수평힘 = v(velocity) 위의식들을이용해님부스의비행능력을해석해보았습니다. 우리님부스기체의모터가틸팅하는앞최대각은 20도이며, 이를이용하여속도를구해보았습니다
8 (2) 상승비행위의 (1) 번과같은방식으로상승비행최대속도를구해보았습니다. 모터추력테스트의데이터를이용하여, 최대수직힘을구하게되면 N입니다. 식을활용하여합력을구하게되면 N이되며, 최종적으로구한상승비행의속도는 32.51m/s입니다. (3) 안정성 / 조종성해석 본기체는 bi-copter 의기본적인특성에따라 pitch 축제어가불가능합니다. 이부분을 해결하기위해 bi-copter 의틸팅부에각도를줌으로써해결할수있었습니다. 틸팅부의원리는프로펠러의회전관성과모멘트를이용합니다. (a) 평상시에는서로다른방향으로회전을합니다. (b) 틸팅부가동일한방향으로기울며생기는회전힘에의해 My의힘을받습니다. (c) 결과적으로 y-y축을중심으로회전힘이생깁니다

 구조설계및해석시뮬레이션프로그램 Abaqus를이용하여구조해석을하였습니다.")

9 <PID 제어의알고리즘 > 3축자이로와 3축가속도센서를이용합니다.PID제어를위해기체의기울기를측정합니다. 측정된데이터를바탕으로기체를수평으로돌아가게해주기위해 BLDC모터와서보모터의변화하는양을제어합니다. 신속하고안정적으로복귀할수있는제어알고리즘구성하였습니다. PID제어는현재상태에서의오차값의크기에비례한제어작용을하는비례항과정상상태오차를없애는작용을하는적분항, 출력값의급격한변화에제동을걸어오버슛을줄이고안정성을향상시키는미분항으로구성되어각항의약점들을보완해주기에안정적인제어가가능합니다. 따라서조종자의조종이외에도 PID제어를통해안정적인자세제어가되어조종의난이도하락과조종안정성을확보하였습니다. 3. 구조설계및해석 (1) 구조설계및해석시뮬레이션프로그램 Abaqus를이용하여구조해석을하였습니다. < 주행시프레임의응력분포 > < 비행시프레임의응력분포 > 그리고프레임에서취약한부분을보강하는방법으로주행시타이어를고정하는축의양끝에서차체를들고주행을하게됩니다. 이를바탕으로 Abaqus를이용하여구조해석을한결과응력의분포는위의그림과같고최대응력은약 20MPa로해석이됩니다. 이는우리프레임의재료인알루미늄의항복강도인 245MPa의 1/10에해당하기때문에프레임의강도가충분함을알수있습니다. 또한변형량해석결과도 5.39 E-07mm로매우작습니다. 비행시모터추력에의해응력이가해지는데이는 Abaqus 해석결과위의그림과같은분포를보이고최대응력은약 22MPa입니다. 위의주행시의프레임에가해지는최대응력과도비슷한응력으로항복강도에미치지못해안전함을알수있습니다. 또한변형량해석결과도 5.35 E-08mm로매우작습니다


10 (2) 재질선정사유본기체의비행형태는 Bi-Copter 형태로기존에많이보였던 Tri-copter와 Quad-Copter 형태보다본체가버텨야하는하중이커야했기때문에, 시중에비행부의부담때문에많이쓰이고있는비금속물질인 Glass Fiber나 Epoxy보단강도가센 Carbon Fiber이적합했다고생각했습니다. 또한하중이집중되는부분에금속재료를사용하였는데비중이가벼운금속에속하는알루미늄을선택하였습니다. 이외의부품에서본체의경량화를위해큰강도를가진 PLA와모든축에서견딜수있는 ABS를선택하게되었고, 이를가공하고자 3D-printer를제작공구로선택하게되었습니다. 외형의재질은 FRP를사용할예정입니다. FRP은성형이쉽기때문에운송기기의외형재질로많이쓰이고있습니다. 4. 도면및주요제원 (1) 도면

11 (2) 주요제원 비행모드 주요제원 주행모드 길이 1600 mm 1200 mm 너비 1800 mm 600 mm 높이 360 mm 700 mm 모터변속기서보배터리 EMAX GT kV Max Thrust 13000g Brushless control + T 160 OPTO 12V 160A HBZ 22.2v 6600mAh 6S2P 35C Max 70C - 멀티콥터용 HPI Savage Flux HP TORK 2200 BRUSHLESS Motor 2200Kv FLUX BLUR ESC HCM 860 BB MG32.5kg cm Turnigy nano-tech 5000mAh 3S 65~130C Lipo Pack 구동방식모터두개를틸트시켜비행후륜방식 (RR) 프롭 Dualsky 22 7 Wooden Propeller 타이어 3D 직접가공 무게 보드 송 수신기 14 kg Mega Pirate AIO Graupner SJ MZ GHz,GR-24L 12ch 수신기 5. 중량및관성모멘트 (1) 내부배열

12 (2) 중량및무게중심 뉴비프로토타입의중량은약 10 kg으로무게중심의위치는그림과같습니다. 좌측은주행모드우측은비행모드일때의무게중심위치입니다. 해석프로그램은 CATIA(V19R 버전 ) 을사용하였으며, 자세한위치좌표는다음과 같습니다
 제작절차 l 설계에대한목표를확실히잡고, 비슷한사례에대해조사 ( 특허조사 ) l 수집된자료와새로수집된자료를바탕으로형상설계의구체화 l 설계진행시해석프로그램을통한강도및응력테스트및 3D Modeling 수행 l 구체화된설계에입각한기자재에대한부품선정 l 선정된부품과")
 의경우에는실제판매되고있는내치기어를사용하였고, 뒷바퀴에부착된대부분의부품을자체제작하여사용하였습니다. 외형제작방법아이소핑크라는스티로폼을이용하여외형디자인의형태를만들예정입니다. 방법은다음과같습니다.")
13 (3) 관성모멘트자료정확한데이터를얻기위해선관성모멘트측정실험장비를통한데이터수집이이루어져야하지만, 재정상황및여건이충족치않아컴퓨터의해석프로그램을통한관성모멘트측정이이루어졌습니다. 관성모멘트는무게중심측정과같이 CATIA ( 버전 V19R) 를해석프로그램으로사용했으며, 그결과는아래와같습니다. 6. 제작및검사방법 (1) 제작절차 l 설계에대한목표를확실히잡고, 비슷한사례에대해조사 ( 특허조사 ) l 수집된자료와새로수집된자료를바탕으로형상설계의구체화 l 설계진행시해석프로그램을통한강도및응력테스트및 3D Modeling 수행 l 구체화된설계에입각한기자재에대한부품선정 l 선정된부품과 Frame을결합시켜 Proto 모델완성후동작및비행실험실시 l 동작및비행실험에서얻은데이터를토대로문제분석및보완 (2) 제작방법, 제작공구기체제작에있어제일중요하다고여긴 Chassis은직접설계하여, 알루미늄판을 Laser Cutting하였고이를직접가공하였습니다. 인휠방식의제일중요하다고생각하는인터널기어 ( 스퍼기어 ) 의경우에는실제판매되고있는내치기어를사용하였고, 뒷바퀴에부착된대부분의부품을자체제작하여사용하였습니다. 외형제작방법아이소핑크라는스티로폼을이용하여외형디자인의형태를만들예정입니다. 방법은다음과같습니다. 사포를이용하여면을깔끔하게다듬은후퍼티를이용하여사포의틈을매우고다시한번면을다듬습니다. 그후면포를형상에
14 맞춰잘올려놓은후에폭시를발라경화시킵니다. 그다음신나를이용해안쪽의스티로폼을녹여냅니다. 튀어나온부분을잘라낸후다시사포질을통해면을다듬고프라이머를뿌립니다. 그리고도색작업을한뒤디테일한그래픽작업을마무리합니다. B. 창의성부문 1. 형상 (1) 형상의참신성우리팀기체님부스는 In-Wheel 주행능력을가진자동차와 VTOL의비행체혼합된형태로, 뒷바퀴안에내장되어있는모터로주행이되는기체입니다. 비행부는모터를 2개사용하는 Bi-Copter의형태를띠고있으며, 실질적인주행이가능하게설계한신비차입니다. (2) 형상의단순성 ( 고장발생가능성 ) 우리팀이제작하는님부스는주행모드는 In-Wheel 구동방식, 비행모드는 Bi-Copter 구동방식형태의기체로제작하고있습니다. 이때문에형상의단순성이쉽진않았는데, 우선주행모드에서고장이발생할수있는부분은모터의피니언기어와맞물리는스퍼기어입니다. 이스퍼기어는소모성부품이될수가있는데, 처음부터이를쉽게교체할수있도록설계하였습니다. 비행부에서는모드변환이되는날개를접는부분과모터가틸트되는부분이취약한부분입니다. 실제운행시이부분에서약간의오류가나더라도큰피해로이어질수있는만큼설계를할때강도가강하고수명이긴재료를택해서제작을진행할것입니다. (3) 주행모드시도로주행현실성주행모드로변환후도로에서주행을할시에국내도로폭기준과환경에맞추어주행에전혀제약이없도록설계하였습니다. 기존 Flying Car의문제점이였던비행부의길이에따른현도로에서의운행문제는 Folding 방식채택으로그불편함을없앴습니다. (4) 비행모드시비행제어현실성비행모드에서는 APM 통제에어스피드센서와파일럿튜브를통해안정적인제어를할예정입니다. 2. 주행방식 (1) 조향방식의참신성최대한단순화시켰습니다. 불필요한부품의사용을자제하고형상을단순화시킴으로무게를줄였습니다. 기존의조향방식을모델링삼아운용하는방식으로차량의최적화된구조를그대로사용할수있습니다. (2) 주행동력전달방식의참신성 인휠모터를이용한동력전달방식 ( 효율적인기어비이용 ). 동력전달방식은후륜구동 방식으로, 인휠모터방식을이용하였습니다. 비행부의하중을줄이고실내공간을극대
 양력발생방식의참신성기존헬기와멀티콥터를결합한틸트로터방식을사용하였습니다. 이는헬기의블레이드를틸트시키는방식과, 멀티콥터의 PID제어하는방식을혼합한비행방식입니다. (2) 비행동력전달방식의참신성기존의신비차대회에서보였던단순히크기만키운멀티콥터모델이아닌, 구현하였을때가능성이큰틸팅모터를이용하여주행부분과결합의용이성을키웠습니다.")
15 화시키고자했습다. 변속기와모터에무리가가지않고토크를높일수있도록 1:10 의기어비를적용시켰습니다. (3) 주행에이득을주는요소 인휠모터방식을채택한만큼, 동력전달축과그외에불필요한부분을제거하여실내공간을극대화시켰으며, 그에따른중량감소로이어져운행시간이증가했습니다. 그리고앞쪽범퍼를장착하여충돌안정성을증가시켰습니다. 3. 비행방식 (1) 양력발생방식의참신성기존헬기와멀티콥터를결합한틸트로터방식을사용하였습니다. 이는헬기의블레이드를틸트시키는방식과, 멀티콥터의 PID제어하는방식을혼합한비행방식입니다. (2) 비행동력전달방식의참신성기존의신비차대회에서보였던단순히크기만키운멀티콥터모델이아닌, 구현하였을때가능성이큰틸팅모터를이용하여주행부분과결합의용이성을키웠습니다. (3) 비행에이득을주는요소틸트시키는방식으로방향전환에대해서힘을직접받아원하는방향으로방향선회가가능합니다. 무게중심이동력사이에존재하므로균형잡기가적절합니다. 4. 주행모드, 비행모드변환방식 (1) 주행 -> 비행변환시참신성주행시에는차량의날개부 ( 프로펠러가달려있는암 ) 이차량에고정되어있습니다. 리니어모터를이용하여암을단단히고정하고있다가펼치는방식을택할것입니다. (2) 비행 -> 주행변환시참신성주행에서비행으로가는방법의반대입니다. 주행과비행은다른수신기를사용할예정입니다. 주행의수신기에리니어모터를연결해놓을예정입니다. 착륙후동일한송신기에서다른주파수의수신기를이용함으로주행모드로변환후리니어모터조작을이용해주행에최적화된형상으로바꿀예정입니다. 5. 제어방식 (1) 조종면형상및위치
16 (2) 조종면구동방식 (3) 조종면대체장치 1. Yaw (Rudder) : 기존비행기의 Rudder 기능을수행하는수직꼬리날개의조종면을없애고기체에달려있는 2개의모터를따로제어하여 Tilt각을변화시켜구동되게하였습니다. 2. Pitch (Elevator) : (a) 평상시에는서로다른방향으로회전을합니다. (b) 틸팅부가동일한방향으로기울며생기는회전힘에의해 My의힘을받습니다. (c) 결과적으로 y-y축을중심으로회전힘이생깁니다. 3. Roll (Aileron) : Roll 제어는각모터의회전수를다르게제어함으로써, 비행체의자세를평형으로유지한상태에서횡방향이동이가능하게하여, 현도로상황에착륙이유리하도록설계하였습니다. (4) 자동시스템구성의참신성바이콥터에 GPS경로를지정하여원하는지점 ( 구간 ) 을통과하게하는방식의자동시스템을구성하였습니다. 이는사전에도착지점을설정하는내비게이션방식으로조종자가목적지 ( 구간 ) 을계속해서인식하지않아도되는편의를추구하였습니다. GPS 지점이설정되면각경로 ( 점 ) 마다직선으로임의의경로가지정되어바이콥터가해당경로사이를직선으로운항하며경로들을통과하는방식으로 GPS 경로지정이많아질수록더욱정밀한자동운항이가능합니다. 바이콥터몸체내부에 BLDC모터를별도로장착하여기체가 YAW축 ( 앞뒤 )( 수직 )( 시소 ) 으로흔들리는경우 MPU6050을이용하여값을받고, 기울어진각도만큼을 MCU에서의 PID제어를통해안정적인상태 ( 원점 ) 로복귀시키도록모터를움직여기체의안정성을높였습니다. 6. 동력원 (1) 독창적인동력원사용여부 (2) 녹색기반에너지원사용여부차량의외부표면에태양열패널을장착하여전기에너지를자체적으로생성하는시스템에대해검토중입니다
 형상제작의편의 알루미늄판을이용한 Chassis 제작은 Laser Cutting 및글라인더를이용하여비교 적쉽게가공할수있었으며, 여러가지부품들은 3D Printer 를이용하여설계및 가공을직접할수있었습니다.")
17 C. 제작부문 1. 기체소재의특이성 (1) 강도 프로토타입에사용된재료는아래의 sus304( 스테인리스스틸 ) 입니다. 본기체를제작 시고려중인재료는총 3 가지정도가있습니다. 서스파이프와 Duralumin 과 Carbon 섬유를고려중입니다. 인장강도 ( MPa ) 항복강도 ( MPa ) 탄성계수 ( GPa ) 비중 sus Duralumin (2) 형상제작의편의 알루미늄판을이용한 Chassis 제작은 Laser Cutting 및글라인더를이용하여비교 적쉽게가공할수있었으며, 여러가지부품들은 3D Printer 를이용하여설계및 가공을직접할수있었습니다. 비행부를지탱해주는 Carbon Pipe 의경우 Binder 를 이용하여프레임과결착시켰으며, 이는제작이용이함을보여줍니다. (3) 가벼운소재 비행을하는데있어가장중요한것이기체의무게를최소화하는것입니다. 따라서 소재는항상가벼우면서강도가충분해야하기때문에알루미늄과카본소재를생각하 였습니다. (4) 소재의현실성 ( 실기일때 ) 저희팀의기체인님부스를실기에적용시킬경우소재는충분히현실성이있다고 생각합니다. 요즘실제자동차에는연비향상및경량화를위해카본복합소재 (CFRP) 가많이쓰인다고합니다. 이를이용하여본기체에적용을시킨다면, 충분히현실성 있는기체라고생각이됩니다. 2. 제작능력 (1) 휠, 조향장치 ( 사진필요 ) 님부스를지상에서움직이게할휠은 2가지로나뉘어져있는데, 앞바퀴 2개는충격흡수를위한서스펜션과원활한조향을위한기존휠과타이어를이용하였고, 인휠형태의뒷바퀴의재료는 PLAMENT, 장치는 EDISON+ 3D Printer를이용하여위의사진처럼직접 3D 가공을하여조립하였습니다
 엔진고정엔진고정은 Tilt 방식을이용한본기체에게안전상제일중요하고강도가제일세야할부분입니다. 그래서프로토타입에는금속판을이용한모터마운트제작으로엔진이확실하게고정될수있도록하였습니다. 앞으로의엔진고정에서의설계방향은더가볍고강도가좋은모터마운트를만드는것입니다.")
18 (2) 힌지, 링케이지 힌지는경첩을링케이지는리니어모터를사용하여제작하였습니다. (3) 날개, 동체의비틀림 Bi-Copter의형태를띠고있는본기체의특성상, 큰추력의반력을버틸수있는튼튼한구조와모터의 Tilt를원활하게해줄수있는자유도가제일중요한요소였다. 그러므로위의사진처럼트러스구조를이용하여큰추력의반력을버틸수있게하였다. 그리고프레임에고정되어있는베어링 2개로모터의자유도를보장해주어날개를제작하였습니다. (4) 엔진고정엔진고정은 Tilt 방식을이용한본기체에게안전상제일중요하고강도가제일세야할부분입니다. 그래서프로토타입에는금속판을이용한모터마운트제작으로엔진이확실하게고정될수있도록하였습니다. 앞으로의엔진고정에서의설계방향은더가볍고강도가좋은모터마운트를만드는것입니다. (5) 완성도 신비차대회를알게되고많은사진과영상을찾아봤습니다. 하지만재작년의
19 부산대를제외하곤획기적이고완성도가높은신비차를보진못하였습니다. 대회에나가고자마음을먹고는다양한학교다양한학과의학생들을만나 1 년동안준비하여완성도높은신비차를만들어보자고이야기했습니다. 각자맡은파트에서최선을다하는팀원들이있기에실제제품의완성도에버금가는아름다운신비차를만들고자지금도최선을다하고있습니다. 공정하고원활한심사를위해반드시아래와같은작성요령에의거하여최종보 고서를작성하도록하십시오. - 작성요령 - 1. 용지 : A4 ( 세로 ) 2. 여백 : 상하각 15mm, 좌우각 25mm 3. 단 : 1단편집 4. 폰트 : 본문바탕체, 11폰트 5. 분량 : 그림, 표포함 15매이하 ( 페이지번호기입 ) 표지, 목차별도 6. 줄간격 : 적절히조정가능 (~200%) 현재까지진행된사항에대해사진등을첨부할것 - 심사원칙 - 1. 보고서의내용과기체에구현되어있는 ( 혹은구현할 ) 내용과일치해야함. 2. 국내의자동차및항공분야전문가로구성된 11명의심사위원단을구성하여채점함. 3. 발표 / 기체심사 (9월 20일 ) 시최종보고서 (hwp) 와발표자료 (ppt), 기체심사등을토대로심사하여채점하며, 대회당일 (9월 21일 ) 주행과비행심사점수를합산하여계산함. - 제출요령 - 1. 제출일자 : ( 월 ) 2. 최종보고서를 ([email protected] or [email protected]) 로송부 3. 지도교수 ( 일반팀의경우팀장 ) 의날인이들어간최종보고서표지스캔본은 로별도송부 제출기한을엄수하여주시기바라며, 이메일송부후반드시수신여부를
20 확인하여주시기바랍니다. (Tel : , 6819 / 경남 TP 문혁연구원, 김성경연구원 )
- 1 - 제 5 회국제신비차경연대회최종보고서
 - 1 - 제 5 회국제신비차경연대회최종보고서 2014. 9. 15. - 2 - A. 학술부문 1. 설계개념및형상설계 (1) 설계목표주어지임무를완수하기위해저희팀에서는수직이착륙이가능한 VTOL형신비차를제작을목표로합니다. 주행과비행미션을효율적으로수행하기위하여신비차의경량화와에너지효율을높이는쪽으로설계 / 제작할계획입니다. 시스템경량화신비차의경량화를위하여경량의 ABS
- 1 - 제 5 회국제신비차경연대회최종보고서 2014. 9. 15. - 2 - A. 학술부문 1. 설계개념및형상설계 (1) 설계목표주어지임무를완수하기위해저희팀에서는수직이착륙이가능한 VTOL형신비차를제작을목표로합니다. 주행과비행미션을효율적으로수행하기위하여신비차의경량화와에너지효율을높이는쪽으로설계 / 제작할계획입니다. 시스템경량화신비차의경량화를위하여경량의 ABS
4-Ç×°ø¿ìÁÖÀ̾߱â¨ç(30-39)
") 항공우주 이야기 항공기에 숨어 있는 과학 및 비밀장치 항공기에는 비행 중에 발생하는 현상을 효율적으로 이용하기 위해 과 학이 스며들어 있다. 특별히 관심을 갖고 관찰하지 않으면 쉽게 발견할 수 없지만, 유심히 살펴보면 객실 창문에 아주 작은 구멍이 있고, 주 날 개를 보면 뒷전(trailing edge) 부분이 꺾어져 있다. 또 비행기 전체 형 상을 보면 수직꼬리날개가
항공우주 이야기 항공기에 숨어 있는 과학 및 비밀장치 항공기에는 비행 중에 발생하는 현상을 효율적으로 이용하기 위해 과 학이 스며들어 있다. 특별히 관심을 갖고 관찰하지 않으면 쉽게 발견할 수 없지만, 유심히 살펴보면 객실 창문에 아주 작은 구멍이 있고, 주 날 개를 보면 뒷전(trailing edge) 부분이 꺾어져 있다. 또 비행기 전체 형 상을 보면 수직꼬리날개가
No Slide Title
 저속 고토크 유압 모터 JS,JH, 시리즈 2K / J2K, 6k / J6K 시리즈 2005-1 B137 001-02 June 2000 JH 시리즈 특징 스풀 밸브 및 지로터가 있는 컴팩트한 디자인. 수입 고압 용량 샤프트 씰, 다 양한 범위의 마운팅 플랜지, 샤프트, 포트, 속도가 설계 유연성을 제공합 니다. 샤프트 회전 방향 및 속도는 쉽고 부드럽게 제어할
저속 고토크 유압 모터 JS,JH, 시리즈 2K / J2K, 6k / J6K 시리즈 2005-1 B137 001-02 June 2000 JH 시리즈 특징 스풀 밸브 및 지로터가 있는 컴팩트한 디자인. 수입 고압 용량 샤프트 씰, 다 양한 범위의 마운팅 플랜지, 샤프트, 포트, 속도가 설계 유연성을 제공합 니다. 샤프트 회전 방향 및 속도는 쉽고 부드럽게 제어할
제 4 회국제신비차경연대회최종보고서 KU Neo Flying Car 소속건국대학교 지도교수박정근 ( 인 ) 팀장류창명 ( 인 ) 외 3 명
 팀장류창명 ( 인 ) 외 3 명") 제 4 회국제신비차경연대회최종보고서 2013. 10. 14. KU Neo Flying Car 소속건국대학교 지도교수박정근 ( 인 ) 팀장류창명 ( 인 ) 외 3 명 Contents < 제목차례 > A. 학술부문 1 1. 설계개념및형상설계 1 (1) 설계목표 1 (2) 디자인의미 1 (3) 외형설계 2 2. 성능및안정성 / 조종성해석 3 (1) 공력및추력특성
제 4 회국제신비차경연대회최종보고서 2013. 10. 14. KU Neo Flying Car 소속건국대학교 지도교수박정근 ( 인 ) 팀장류창명 ( 인 ) 외 3 명 Contents < 제목차례 > A. 학술부문 1 1. 설계개념및형상설계 1 (1) 설계목표 1 (2) 디자인의미 1 (3) 외형설계 2 2. 성능및안정성 / 조종성해석 3 (1) 공력및추력특성
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
(b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로
 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로") Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
< > 1 2 '.... BLDC ESC GPS GPS.,.
 < > 1 2 '.... BLDC ESC....... GPS GPS.,. 1. 개요 연구동기및목적 사회적연구환경 1 1 (Amazon) (Prime Air) (Drone).. 그림 1. 프라임에어 (PrimeAir) 서비스.,... (Impact Lab) SF (SF Express) 500. SF (Octocopter), 2.7kg. (InCake),....
< > 1 2 '.... BLDC ESC....... GPS GPS.,. 1. 개요 연구동기및목적 사회적연구환경 1 1 (Amazon) (Prime Air) (Drone).. 그림 1. 프라임에어 (PrimeAir) 서비스.,... (Impact Lab) SF (SF Express) 500. SF (Octocopter), 2.7kg. (InCake),....
..액추에이터청정화기기모듈러F압력센서10-M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가스켓 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해
 ..액추에이터청정화기기모듈러F압력센서M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해니켈도금처리 튜브재질 폴리우레탄 사용유체 공기, 물주 ) M의경우 ø.1/ø2, ø/ø 적용 M-R ø.1/ø2
..액추에이터청정화기기모듈러F압력센서M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해니켈도금처리 튜브재질 폴리우레탄 사용유체 공기, 물주 ) M의경우 ø.1/ø2, ø/ø 적용 M-R ø.1/ø2
제 회경상남도지사배국제신비차 경연대회최종보고서 프렌즈 소속일반팀 지도교수 인 팀장서영준 인 외 명
 제 회경상남도지사배국제신비차 경연대회최종보고서 프렌즈 소속일반팀 지도교수 인 팀장서영준 인 외 명 목차 1. 설개개념 ------------------------------------ 1 (1) 임무분석 --------------------------------- 1 (2) 설계목표 --------------------------------- 2 (3) 디자인의미
제 회경상남도지사배국제신비차 경연대회최종보고서 프렌즈 소속일반팀 지도교수 인 팀장서영준 인 외 명 목차 1. 설개개념 ------------------------------------ 1 (1) 임무분석 --------------------------------- 1 (2) 설계목표 --------------------------------- 2 (3) 디자인의미
SM710월가격표9.30
 SE / SE PLEASURE / LE/ RE / PRESTIGE / RE35 2009년 10월 기준 SM7 가격표 SE SE PLEASURE LE RE PRESTIGE RE35 SM7 PERFECT CARE SERVICE Line-up Neo VQ23 SE 대형 승용차의 품위를 가장 합리적으로 즐기십시오. SE PLEASURE NEW LE 매력적인 스타일에
SE / SE PLEASURE / LE/ RE / PRESTIGE / RE35 2009년 10월 기준 SM7 가격표 SE SE PLEASURE LE RE PRESTIGE RE35 SM7 PERFECT CARE SERVICE Line-up Neo VQ23 SE 대형 승용차의 품위를 가장 합리적으로 즐기십시오. SE PLEASURE NEW LE 매력적인 스타일에
<4D F736F F F696E74202D203137C0E55FBFACBDC0B9AEC1A6BCD6B7E7BCC72E707074>
 SIMATIC S7 Siemens AG 2004. All rights reserved. Date: 22.03.2006 File: PRO1_17E.1 차례... 2 심벌리스트... 3 Ch3 Ex2: 프로젝트생성...... 4 Ch3 Ex3: S7 프로그램삽입... 5 Ch3 Ex4: 표준라이브러리에서블록복사... 6 Ch4 Ex1: 실제구성을 PG 로업로드하고이름변경......
SIMATIC S7 Siemens AG 2004. All rights reserved. Date: 22.03.2006 File: PRO1_17E.1 차례... 2 심벌리스트... 3 Ch3 Ex2: 프로젝트생성...... 4 Ch3 Ex3: S7 프로그램삽입... 5 Ch3 Ex4: 표준라이브러리에서블록복사... 6 Ch4 Ex1: 실제구성을 PG 로업로드하고이름변경......
6_5상 스테핑 모터_ _OK.indd
 모델구성 적용모델 : 표준축형,, A 8K M 5 6 6 B Autonics motor 1: 은편축형만제공합니다. 2: Standard 결선방식은주문사양입니다. ( 단, 24각, A4K-G564(W), A8K-G566(W) 은제외입니다.) 모델구성 Q-42 모터형식 적용모델 : 기어드일체형,, 로터리액츄에이터형, 로터리액츄에이터 + A M 5 최대허용토크 모터상수
모델구성 적용모델 : 표준축형,, A 8K M 5 6 6 B Autonics motor 1: 은편축형만제공합니다. 2: Standard 결선방식은주문사양입니다. ( 단, 24각, A4K-G564(W), A8K-G566(W) 은제외입니다.) 모델구성 Q-42 모터형식 적용모델 : 기어드일체형,, 로터리액츄에이터형, 로터리액츄에이터 + A M 5 최대허용토크 모터상수
PERFORMANCE technology the all-new bmw 5 series. dynamic 06 business 14 comfort 20 safety 22 model LineuP 24 TecHnicaL data 26 bmw service 28 bmw kore
 sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
Microsoft Word - PLC제어응용-2차시.doc
 과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
LM 가이드
 RSR 가이드 제품치수제원 치수도, 치수표 RSR- 형, RSR- 형, RSR-T 형... RSR- 형, RSR-K 형, RSR-V 형, RSR- 형.. RSR-(T) 형, RSR-(T) 형.. RSR-V 형, RSR-V 형, RSR- 형... 레일의표준길이와최대길이... 스톱퍼... 옵션... as 및각종씰부착후 블록치수 ( 치수 ).. 캡... QZ 부착후의
RSR 가이드 제품치수제원 치수도, 치수표 RSR- 형, RSR- 형, RSR-T 형... RSR- 형, RSR-K 형, RSR-V 형, RSR- 형.. RSR-(T) 형, RSR-(T) 형.. RSR-V 형, RSR-V 형, RSR- 형... 레일의표준길이와최대길이... 스톱퍼... 옵션... as 및각종씰부착후 블록치수 ( 치수 ).. 캡... QZ 부착후의
KMC.xlsm
 제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
쓰리 핸드(삼침) 요일 및 2405 요일 시간, 및 요일 설정 1. 용두를 2의 위치로 당기고 반시계방향으로 돌려 전날로 를 설정합니다. 2. 용두를 시계방향으로 돌려 전날로 요일을 설정합니다. 3. 용두를 3의 위치로 당기고 오늘 와 요일이 표시될 때까지 시계방향으로
 요일 및 2405 요일 시간, 및 요일 설정 1. 용두를 2의 위치로 당기고 반시계방향으로 돌려 전날로 를 설정합니다. 2. 용두를 시계방향으로 돌려 전날로 요일을 설정합니다. 3. 용두를 3의 위치로 당기고 오늘 와 요일이 표시될 때까지 시계방향으로") 한국어 표준 설정안내 서브 초침 시간 및 설정 1. 용두를 2의 위치로 뽑아냅니다. 2. 용두를 시계방향 또는 반시계방향으로 돌려(모델에 따라 다름) 를 전날로 설정합니다. 3. 용두를 3의 위치로 당기고 현재 가 표시될 때까지 시계방향으로 돌립니다. 4. 용두를 계속 돌려 정확한 오전/오후 시간을 설정합니다. 5. 용두를 1의 위치로 되돌립니다. 169 쓰리
한국어 표준 설정안내 서브 초침 시간 및 설정 1. 용두를 2의 위치로 뽑아냅니다. 2. 용두를 시계방향 또는 반시계방향으로 돌려(모델에 따라 다름) 를 전날로 설정합니다. 3. 용두를 3의 위치로 당기고 현재 가 표시될 때까지 시계방향으로 돌립니다. 4. 용두를 계속 돌려 정확한 오전/오후 시간을 설정합니다. 5. 용두를 1의 위치로 되돌립니다. 169 쓰리
96 경첩들어올림 347 타입 A Ø 타입 B Ø 신속하고쉬운도어탈착 모든금속구조재질및마감처리강철, 아연도금또는스테인리스스틸
 96 경첩들어올림 347 6.35.1 Ø 6.35 31.7 25.4.1 6.35 25.4.1 6.35.1 Ø 6.35 6.35 31.7 모든금속구조강철, 아연도금또는스테인리스스틸 63.5 50.8 50.8 50.8 63.5 50.8 Ø 3.2 Ø 3.2 25.4 20.8 20.8 25.4 1.27 1.27 1.27 1.27 50.8 4 x Ø 3.2±0.1
96 경첩들어올림 347 6.35.1 Ø 6.35 31.7 25.4.1 6.35 25.4.1 6.35.1 Ø 6.35 6.35 31.7 모든금속구조강철, 아연도금또는스테인리스스틸 63.5 50.8 50.8 50.8 63.5 50.8 Ø 3.2 Ø 3.2 25.4 20.8 20.8 25.4 1.27 1.27 1.27 1.27 50.8 4 x Ø 3.2±0.1
Microsoft Word - CSWP_sample(KOR).docx
.docx") SOLIDWORKS CSWP 예제 Certified SOLIDWORKS Professional: Solid Modeling Specialist (CSWP-CORE) 공인솔리드웍스프로페셔널 : 솔리드모델링전문가 (CSWP-코어) CSWP는 SOLIDWORKS 고급기술시험을통과한프로페셔널을의미합니다. CSWP는 SOLIDWORKS의다양한복합적인피처를사용하여변수지정과파트및구동어셈블리를설계하고분석하는능력을보유하고있다는것을증명하는자격입니다.
SOLIDWORKS CSWP 예제 Certified SOLIDWORKS Professional: Solid Modeling Specialist (CSWP-CORE) 공인솔리드웍스프로페셔널 : 솔리드모델링전문가 (CSWP-코어) CSWP는 SOLIDWORKS 고급기술시험을통과한프로페셔널을의미합니다. CSWP는 SOLIDWORKS의다양한복합적인피처를사용하여변수지정과파트및구동어셈블리를설계하고분석하는능력을보유하고있다는것을증명하는자격입니다.
Microsoft Word - Lab.4
 Lab. 1. I-V Lab. 4. 연산증폭기 Characterist 비 tics of a Dio 비교기 ode 응용 회로 1. 실험목표 연산증폭기를이용한비교기비교기응용회로를이해 응용회로를구성, 측정및평가해서연산증폭기 2. 실험회로 A. 연산증폭기비교기응용회로 (a) 기본비교기 (b) 출력제한 비교기 (c) 슈미트트리거 (d) 포화반파정류회로그림 4.1. 연산증폭기비교기응용회로
Lab. 1. I-V Lab. 4. 연산증폭기 Characterist 비 tics of a Dio 비교기 ode 응용 회로 1. 실험목표 연산증폭기를이용한비교기비교기응용회로를이해 응용회로를구성, 측정및평가해서연산증폭기 2. 실험회로 A. 연산증폭기비교기응용회로 (a) 기본비교기 (b) 출력제한 비교기 (c) 슈미트트리거 (d) 포화반파정류회로그림 4.1. 연산증폭기비교기응용회로
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
오토 2, 3월호 내지최종
 Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
サーボモータ用高精度減速機_AFC_Aシリーズ
 Accurate Reducer High-Precision Gear for Servo-motors CONTENTS P. 2 P. A1 P. B1 P. T1 P. T23 1 유성감속기 APG type 100W-3000W 3arcmin 1arcmin 형번12 형번1 형번2 형번22 기종구성 용량 정밀도 3 10 100W 20 형번12 2 3분 1분 형번22 9
Accurate Reducer High-Precision Gear for Servo-motors CONTENTS P. 2 P. A1 P. B1 P. T1 P. T23 1 유성감속기 APG type 100W-3000W 3arcmin 1arcmin 형번12 형번1 형번2 형번22 기종구성 용량 정밀도 3 10 100W 20 형번12 2 3분 1분 형번22 9
LM 가이드
 SR/SS 볼리테이너타입 가이드 B 제품치수제원 치수도, 치수표 SR-R 형, SR-R 형... SS-R 형, SS-R 형... SR- 형, SR- 형... SS- 형, SS- 형... SR-RH 형 ( 수주대응품 ), SR-RH 형 ( 수주대응품 ).. SS-RH 형 ( 수주대응품 ), SS-RH 형 ( 수주대응품 )... SR-H 형 ( 수주대응품 ),
SR/SS 볼리테이너타입 가이드 B 제품치수제원 치수도, 치수표 SR-R 형, SR-R 형... SS-R 형, SS-R 형... SR- 형, SR- 형... SS- 형, SS- 형... SR-RH 형 ( 수주대응품 ), SR-RH 형 ( 수주대응품 ).. SS-RH 형 ( 수주대응품 ), SS-RH 형 ( 수주대응품 )... SR-H 형 ( 수주대응품 ),
<B3EDB9AEC0DBBCBAB9FD2E687770>
 (1) 주제 의식의 원칙 논문은 주제 의식이 잘 드러나야 한다. 주제 의식은 논문을 쓰는 사람의 의도나 글의 목적 과 밀접한 관련이 있다. (2) 협력의 원칙 독자는 필자를 이해하려고 마음먹은 사람이다. 따라서 필자는 독자가 이해할 수 있는 말이 나 표현을 사용하여 독자의 노력에 협력해야 한다는 것이다. (3) 논리적 엄격성의 원칙 감정이나 독단적인 선언이
(1) 주제 의식의 원칙 논문은 주제 의식이 잘 드러나야 한다. 주제 의식은 논문을 쓰는 사람의 의도나 글의 목적 과 밀접한 관련이 있다. (2) 협력의 원칙 독자는 필자를 이해하려고 마음먹은 사람이다. 따라서 필자는 독자가 이해할 수 있는 말이 나 표현을 사용하여 독자의 노력에 협력해야 한다는 것이다. (3) 논리적 엄격성의 원칙 감정이나 독단적인 선언이
Microsoft Word - 4장_처짐각법.doc
 동아대학교토목공학과구조역학 4. 처짐각법 변위법 (Slope Deflection ethod Displacement ethod) Objective of this chapter: 처짐각법의기본개념. What will be presented: 처짐각법을이용한다차부정정보해석 처짐각법을이용한다차부정정골조해석 Theoretical background 미국미네소타대학의
동아대학교토목공학과구조역학 4. 처짐각법 변위법 (Slope Deflection ethod Displacement ethod) Objective of this chapter: 처짐각법의기본개념. What will be presented: 처짐각법을이용한다차부정정보해석 처짐각법을이용한다차부정정골조해석 Theoretical background 미국미네소타대학의
<BFACBDC0B9AEC1A6C7AEC0CC5F F E687770>
 IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
Microsoft Word - 5장_보&골조.doc
 5. 보와골조 : 전단력과휨모멘트 (Beams and Frames: Shear forces and bending moments) 수업목적 : 평면상에서하중을받는보와골조에발생하는내력과모 멘트계산에필요한해석기법을이해하고습득. 수업내용 : 전단력도와모멘트도 하중, 전단력, 휨모멘트사이의관계 정성적처짐형상 평면골조의정적정정, 부정정, 불안정 평면골조의해석 Lecture
5. 보와골조 : 전단력과휨모멘트 (Beams and Frames: Shear forces and bending moments) 수업목적 : 평면상에서하중을받는보와골조에발생하는내력과모 멘트계산에필요한해석기법을이해하고습득. 수업내용 : 전단력도와모멘트도 하중, 전단력, 휨모멘트사이의관계 정성적처짐형상 평면골조의정적정정, 부정정, 불안정 평면골조의해석 Lecture
ADP-2480
 Mitsubishi PLC 접속 GP 는 Mitsubishi FX Series 와통신이가능합니다. 시스템구성 6 7 8 GP-80 RS- Cable RS-C Cable FXN--BD FXN--BD 6 FX Series(FXS,FXN,FXN,FXNC, FXU) 7 FXS, FXN 8 FXN FX Series 는기본적으로 RS- 통신을하며, RS-/ converter
Mitsubishi PLC 접속 GP 는 Mitsubishi FX Series 와통신이가능합니다. 시스템구성 6 7 8 GP-80 RS- Cable RS-C Cable FXN--BD FXN--BD 6 FX Series(FXS,FXN,FXN,FXNC, FXU) 7 FXS, FXN 8 FXN FX Series 는기본적으로 RS- 통신을하며, RS-/ converter
(b) 연산증폭기슬루율측정회로 (c) 연산증폭기공통모드제거비측정회로 그림 1.1. 연산증폭기성능파라미터측정회로
 연산증폭기슬루율측정회로 (c) 연산증폭기공통모드제거비측정회로 그림 1.1. 연산증폭기성능파라미터측정회로") Lab. 1. I-V Characteristics of a Diode Lab. 1. 연산증폭기특성실험 1. 실험목표 연산증폭기의전압이득 (Gain), 입력저항, 출력저항, 대역폭 (Bandwidth), 오프셋전압 (Offset Voltage), 공통모드제거비 (Common-mode Rejection Ratio; CMRR) 및슬루율 (Slew Rate) 등의기본적인성능파라미터에대해서실험을통해서이해
Lab. 1. I-V Characteristics of a Diode Lab. 1. 연산증폭기특성실험 1. 실험목표 연산증폭기의전압이득 (Gain), 입력저항, 출력저항, 대역폭 (Bandwidth), 오프셋전압 (Offset Voltage), 공통모드제거비 (Common-mode Rejection Ratio; CMRR) 및슬루율 (Slew Rate) 등의기본적인성능파라미터에대해서실험을통해서이해
ePapyrus PDF Document
 S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications ooling System 260 190 46 (W ) 1024 x 768 (4:3) L 400 cd 4선압력방식 1.5Kg ase an(50 50) onector X 2 VS 고정방식, 매립브라켓고정방식 245 x 184 (1T~5T 가능 ) 12V/5 dapter
S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications ooling System 260 190 46 (W ) 1024 x 768 (4:3) L 400 cd 4선압력방식 1.5Kg ase an(50 50) onector X 2 VS 고정방식, 매립브라켓고정방식 245 x 184 (1T~5T 가능 ) 12V/5 dapter
전자회로 실험
 전자회로실험 2 조 고주현허영민 BJT의고정바이어스및 부품 * 실험목적 1) 고정바이어스와 회로의직류동작점을결정한다. 다이오드의특성 * 실험장비 계측장비 - Digital Multi Meter 부품 -저항 다이오드의특성 부품 - 트랜지스터
전자회로실험 2 조 고주현허영민 BJT의고정바이어스및 부품 * 실험목적 1) 고정바이어스와 회로의직류동작점을결정한다. 다이오드의특성 * 실험장비 계측장비 - Digital Multi Meter 부품 -저항 다이오드의특성 부품 - 트랜지스터
- 2 -
 - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
- 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
MD-C-035-1(N-71-18)
") MD-C-035-1(N-71-18) KEPIC 적용사례 : MD-C-035-1(N-71-18) ( 승인일자 : 2010. 8. 31) 제목 : 용접으로제조되는 KEPIC-MNF 의 1, 2, 3 및 MC 등급기기지지물의추가재 료 (KEPIC-MN) 질의 : 품목이용접으로제작될경우, KEPIC-MDP의부록 IA, IB, IIA, IIB 및 VI에나열된것이외에추가로어떤재료가
MD-C-035-1(N-71-18) KEPIC 적용사례 : MD-C-035-1(N-71-18) ( 승인일자 : 2010. 8. 31) 제목 : 용접으로제조되는 KEPIC-MNF 의 1, 2, 3 및 MC 등급기기지지물의추가재 료 (KEPIC-MN) 질의 : 품목이용접으로제작될경우, KEPIC-MDP의부록 IA, IB, IIA, IIB 및 VI에나열된것이외에추가로어떤재료가
ePapyrus PDF Document
 S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications 260 190 46 (W ) 1024 x 768 (4:3) 400 cd 4선압력방식 1.5Kg 245 x 184 (1T~5T 가능 ) Intel eleron J1900 Quard ore 2z Intel VL887 O, O 250 ~ 1T, 40 ~ SS 옵션가능
S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications 260 190 46 (W ) 1024 x 768 (4:3) 400 cd 4선압력방식 1.5Kg 245 x 184 (1T~5T 가능 ) Intel eleron J1900 Quard ore 2z Intel VL887 O, O 250 ~ 1T, 40 ~ SS 옵션가능
주지스님의 이 달의 법문 성철 큰스님 기념관 불사를 회향하면서 20여 년 전 성철 큰스님 사리탑을 건립하려고 중국 석굴답사 연구팀을 따라 중국 불교성지를 탐방하였습 니다. 대동의 운강석굴, 용문석굴, 공의석굴, 맥적산석 굴, 대족석굴, 티벳 라싸의 포탈라궁과 주변의 큰
 불교학과반(1년 과정) 기초교리반(6개월 과정) 매주 화요일 저녁 7시 매주 목요일 오후 2시 / 저녁 7시 5월 5일 5월 12일 5월 19일 5월 26일 어린이날 휴강 인도불교사 2 / 이거룡 교수님 인도불교사 3 / 이거룡 교수님 중국불교사 1 / 이덕진 교수님 5월 7일 5월 14일 5월 21일 5월 28일 백련암 예불의식 및 기도법 / 총무스님 성철
불교학과반(1년 과정) 기초교리반(6개월 과정) 매주 화요일 저녁 7시 매주 목요일 오후 2시 / 저녁 7시 5월 5일 5월 12일 5월 19일 5월 26일 어린이날 휴강 인도불교사 2 / 이거룡 교수님 인도불교사 3 / 이거룡 교수님 중국불교사 1 / 이덕진 교수님 5월 7일 5월 14일 5월 21일 5월 28일 백련암 예불의식 및 기도법 / 총무스님 성철
LM 가이드
 R/RS 가이드 B 제품치수제원 치수도, 치수표 R-R 형, R-LR 형... RS-R 형, RS-LR 형... R-A 형, R-LA 형... RS-A 형, RS-LA 형... R-B 형, R-LB 형... RS-B 형, RS-LB 형... 레일의표준길이와최대길이... 옵션... LaS 및각종씰부착후 블록치수 (L 치수 ).. LaS 부착후의그리스니플증가치수..
R/RS 가이드 B 제품치수제원 치수도, 치수표 R-R 형, R-LR 형... RS-R 형, RS-LR 형... R-A 형, R-LA 형... RS-A 형, RS-LA 형... R-B 형, R-LB 형... RS-B 형, RS-LB 형... 레일의표준길이와최대길이... 옵션... LaS 및각종씰부착후 블록치수 (L 치수 ).. LaS 부착후의그리스니플증가치수..
비행 4 배경 지식 현재와 과거의 크고 작은 비행기들 지난 세기 동안 비행기에는 많은 변화가 있 었다. 라이트 플라이어는 작고 느렸다. 이 작은 비행 기에는 한 사람만 탈 수 있었다. 그러나 오늘날의 비 행기는 거대하고 빠르다. 수백 명을 태우고 단 몇 시 간 만에 대
 교사용 4. 비행 1 단원 소개 비행을 하기 위해서 꼭 알아야 할 것 중의 하나인 비행방향이 있다. 본 단원은 방향 을 알기 위한 나침반 제작 활동과 항공지도를 보며 비행계획을 수립하는 활동과 빨대 비 행기를 만들어 직접 시험비행을 함으로써 비행조종에 대한 공부를 하고자 한다. 2 주제 안내 순 주 제 대상학년 소요시간 1 방향을 알려주는 나침반 4 ~ 6학년
교사용 4. 비행 1 단원 소개 비행을 하기 위해서 꼭 알아야 할 것 중의 하나인 비행방향이 있다. 본 단원은 방향 을 알기 위한 나침반 제작 활동과 항공지도를 보며 비행계획을 수립하는 활동과 빨대 비 행기를 만들어 직접 시험비행을 함으로써 비행조종에 대한 공부를 하고자 한다. 2 주제 안내 순 주 제 대상학년 소요시간 1 방향을 알려주는 나침반 4 ~ 6학년
ISP and CodeVisionAVR C Compiler.hwp
 USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler http://www.avrmall.com/ November 12, 2007 Copyright (c) 2003-2008 All Rights Reserved. USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler
USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler http://www.avrmall.com/ November 12, 2007 Copyright (c) 2003-2008 All Rights Reserved. USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler
포천시시설관리공단 내규 제 24호 포천시시설관리공단 인사규정 시행내규 일부개정(안) 포천시시설관리공단 인사규정 시행내규 일부를 다음과 같이 개정 한다. 제17조(기간제근로자의 무기계약직 임용) 1 기간제근로자 관리규정 제16조 를 제19조 로 한다. 제20조(인사기록)
 포천시시설관리공단 인사규정 시행내규 일부를 다음과 같이 개정 한다. 제17조(기간제근로자의 무기계약직 임용) 1 기간제근로자 관리규정 제16조 를 제19조 로 한다. 제20조(인사기록)") 포천시시설관리공단 인사규정 시행내규 개정이유 및 주요내용 개정구분 :일부개정 개정이유 조항에 대한 오류 수정 및 근무성적평정 작성 기준 변경사항을 적용하여 인사관리 업무에 만전을 기하고자함 주요내용 신 구조문 대비표 참조 개정 규정안 :덧붙임 신 구조문 대비표 :덧붙임 그 밖에 참고사항 :덧붙임 포천시시설관리공단 인사규정시행내규(전문) 포천시시설관리공단 내규
포천시시설관리공단 인사규정 시행내규 개정이유 및 주요내용 개정구분 :일부개정 개정이유 조항에 대한 오류 수정 및 근무성적평정 작성 기준 변경사항을 적용하여 인사관리 업무에 만전을 기하고자함 주요내용 신 구조문 대비표 참조 개정 규정안 :덧붙임 신 구조문 대비표 :덧붙임 그 밖에 참고사항 :덧붙임 포천시시설관리공단 인사규정시행내규(전문) 포천시시설관리공단 내규
Phanto 4 Pro DJI PHANTOMTM 4 Pro는 스마트한 프로슈머를 위한 비행 카메라로, 최대 100bps에서 60fps 4K 동영상을 촬영하고 0메가픽셀 스틸 사진을 촬영할 수 있습니다. 4방향 장애물 회피 기능으로 비행 중에 장애물을 지능적으로 회피합니
 퀵 스타트 가이드 V1.0 Phanto 4 Pro DJI PHANTOMTM 4 Pro는 스마트한 프로슈머를 위한 비행 카메라로, 최대 100bps에서 60fps 4K 동영상을 촬영하고 0메가픽셀 스틸 사진을 촬영할 수 있습니다. 4방향 장애물 회피 기능으로 비행 중에 장애물을 지능적으로 회피합니다. DJI GOTM 4 앱에서 업그레이드된 TapFlyTM와 ActiveTrackTM을
퀵 스타트 가이드 V1.0 Phanto 4 Pro DJI PHANTOMTM 4 Pro는 스마트한 프로슈머를 위한 비행 카메라로, 최대 100bps에서 60fps 4K 동영상을 촬영하고 0메가픽셀 스틸 사진을 촬영할 수 있습니다. 4방향 장애물 회피 기능으로 비행 중에 장애물을 지능적으로 회피합니다. DJI GOTM 4 앱에서 업그레이드된 TapFlyTM와 ActiveTrackTM을
 *) α ρ : 0.7 0.5 0.5 0.7 0.5 0.5-1 - 1 - - 0.7 (**) 0.5 0.5-1 - (**) Max i e i Max 1 =150 kg e 1 = 50 g xxx.050 kg xxx.050 kg xxx.05 kg xxx.05 kg Max 2=300 kg
*) α ρ : 0.7 0.5 0.5 0.7 0.5 0.5-1 - 1 - - 0.7 (**) 0.5 0.5-1 - (**) Max i e i Max 1 =150 kg e 1 = 50 g xxx.050 kg xxx.050 kg xxx.05 kg xxx.05 kg Max 2=300 kg
HX170 설치부품 HX series HX0170IP03-FCR-19 HX0170IP03-FCR-90 HX0170IP03-BF-19
 ` HX170 파워라인시리즈는가장길이가짧고가장강력한피스톤로드씰의가스스프링입 니다. 장소활용에최적합니다. 파워라인스프링은 1700N 에서 95000N 까지의힘과 7 에서 125 까지의스트로크까지허용됩니다. HX170 은밑부분의 Port 연결부에서 Micro Hose TM 호스시스템으로가스가충전됩니다. 180bar/2610psi Lmin L HX170-007 7
` HX170 파워라인시리즈는가장길이가짧고가장강력한피스톤로드씰의가스스프링입 니다. 장소활용에최적합니다. 파워라인스프링은 1700N 에서 95000N 까지의힘과 7 에서 125 까지의스트로크까지허용됩니다. HX170 은밑부분의 Port 연결부에서 Micro Hose TM 호스시스템으로가스가충전됩니다. 180bar/2610psi Lmin L HX170-007 7
실험 5
 실험. apacitor 및 Inductor 의특성 교류회로 apacitor 의 apacitance 측정 본실험에서는 capacitor를포함하는회로에교류 (A) 전원이연결되어있을때, 정상상태 (steady state) 에서 capacitor의전압과전류의관계를알아본다. apacitance의값이 인 capacitor의전류와전압의관계는다음식과같다. i dv = dt
실험. apacitor 및 Inductor 의특성 교류회로 apacitor 의 apacitance 측정 본실험에서는 capacitor를포함하는회로에교류 (A) 전원이연결되어있을때, 정상상태 (steady state) 에서 capacitor의전압과전류의관계를알아본다. apacitance의값이 인 capacitor의전류와전압의관계는다음식과같다. i dv = dt
[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (
![[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (](/thumbs/103/157216582.jpg "[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (") [ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : 2013. 4. 1 ~ 2014. 12. 31 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 ( 울산과학고 ) 권범석 ( 울산과학고 ) 김진영 ( 울산과학고 ) 조희제 ( 울산과학고 ) .
[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : 2013. 4. 1 ~ 2014. 12. 31 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 ( 울산과학고 ) 권범석 ( 울산과학고 ) 김진영 ( 울산과학고 ) 조희제 ( 울산과학고 ) .
May leaflet_final.pdf
 2012.5.7 ~ 6.2 [19-22week // for 4weeks] Love Gift-Giving, Love Tupperware 5week 19 - week 22 / May 683,000 777,400 614,700 94,400 871_ May Flower Set(16) 210,000 441_ 37,600 326_ 28,800 308_ 46,400 02
2012.5.7 ~ 6.2 [19-22week // for 4weeks] Love Gift-Giving, Love Tupperware 5week 19 - week 22 / May 683,000 777,400 614,700 94,400 871_ May Flower Set(16) 210,000 441_ 37,600 326_ 28,800 308_ 46,400 02
catalogue
 KM International Product catalogue DCS(Display Computing Solution) 선구자 DCS(Display Computing Solution) 선구자 PC본체 + 모니터 + 스피커 하나로 결합된 올인원PC 올인원PC는 일반 데스크톱 PC 대비 월등히 낮은 소비전력과 높은 공간 활용성으로 노트북과 더불어 최근 PC 트랜드를
KM International Product catalogue DCS(Display Computing Solution) 선구자 DCS(Display Computing Solution) 선구자 PC본체 + 모니터 + 스피커 하나로 결합된 올인원PC 올인원PC는 일반 데스크톱 PC 대비 월등히 낮은 소비전력과 높은 공간 활용성으로 노트북과 더불어 최근 PC 트랜드를
이 장에서 사용되는 MATLAB 명령어들은 비교적 복잡하므로 MATLAB 창에서 명령어를 직접 입력하지 않고 확장자가 m 인 text 파일을 작성하여 실행을 한다
 이장에서사용되는 MATLAB 명령어들은비교적복잡하므로 MATLAB 창에서명령어를직접입력하지않고확장자가 m 인 text 파일을작성하여실행을한다. 즉, test.m 과같은 text 파일을만들어서 MATLAB 프로그램을작성한후실행을한다. 이와같이하면길고복잡한 MATLAB 프로그램을작성하여실행할수있고, 오류가발생하거나수정이필요한경우손쉽게수정하여실행할수있는장점이있으며,
이장에서사용되는 MATLAB 명령어들은비교적복잡하므로 MATLAB 창에서명령어를직접입력하지않고확장자가 m 인 text 파일을작성하여실행을한다. 즉, test.m 과같은 text 파일을만들어서 MATLAB 프로그램을작성한후실행을한다. 이와같이하면길고복잡한 MATLAB 프로그램을작성하여실행할수있고, 오류가발생하거나수정이필요한경우손쉽게수정하여실행할수있는장점이있으며,
제 2 회경상남도지사배국제신비차 ( 新飛車, Flying Car) 경연대회최종보고서 소속성균관대학교 지도교수김훈모 인 팀장양승웅 인 외 명
 경연대회최종보고서 소속성균관대학교 지도교수김훈모 인 팀장양승웅 인 외 명") 제 2 회경상남도지사배국제신비차 ( 新飛車, Flying Car) 경연대회최종보고서 2011. 9. 6. 소속성균관대학교 지도교수김훈모 인 팀장양승웅 인 외 명 1. 설계개념 (1) 임무분석 a) 주행임무 - 본팀의차량은 VTOL 기체로서주행모드에서는전폭 m, 전장 m, 전고 m, 휠베이스 m 크기의기체로주동력원은 BLDC모터 2개를이용하고, 조향은서보모터를이용한다.
제 2 회경상남도지사배국제신비차 ( 新飛車, Flying Car) 경연대회최종보고서 2011. 9. 6. 소속성균관대학교 지도교수김훈모 인 팀장양승웅 인 외 명 1. 설계개념 (1) 임무분석 a) 주행임무 - 본팀의차량은 VTOL 기체로서주행모드에서는전폭 m, 전장 m, 전고 m, 휠베이스 m 크기의기체로주동력원은 BLDC모터 2개를이용하고, 조향은서보모터를이용한다.
À̵¿·Îº¿ÀÇ ÀÎÅͳݱâ¹Ý ¿ø°ÝÁ¦¾î½Ã ½Ã°£Áö¿¬¿¡_.hwp
 l Y ( X g, Y g ) r v L v v R L θ X ( X c, Yc) W (a) (b) DC 12V 9A Battery 전원부 DC-DC Converter +12V, -12V DC-DC Converter 5V DC-AC Inverter AC 220V DC-DC Converter 3.3V Motor Driver 80196kc,PWM Main
l Y ( X g, Y g ) r v L v v R L θ X ( X c, Yc) W (a) (b) DC 12V 9A Battery 전원부 DC-DC Converter +12V, -12V DC-DC Converter 5V DC-AC Inverter AC 220V DC-DC Converter 3.3V Motor Driver 80196kc,PWM Main
- 1 -
 [ 붙임 3] 작품설명서표지 작품번호 1145 편경은왜기역자인가? - 기역자형태에따른기본진동수및고유진동수변화분석 - 출품분야학생부출품부문물리 2013. 7. 8. 구분성명 출품학생 지도교사 강민석 이승목 정혁 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - cos cosh sinh cos sin - 10 - 는반지름
[ 붙임 3] 작품설명서표지 작품번호 1145 편경은왜기역자인가? - 기역자형태에따른기본진동수및고유진동수변화분석 - 출품분야학생부출품부문물리 2013. 7. 8. 구분성명 출품학생 지도교사 강민석 이승목 정혁 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - cos cosh sinh cos sin - 10 - 는반지름
(-) : (), ()....... () : (-), (-). HP.... (-) :. (-) :. BGM volume :. SE volume :. Voice volume :. Output sound test :. (-) :. () :. ON. () :. ON. (-)
 : (), ()....... () : (-), (-). HP.... (-) :. (-) :. BGM volume :. SE volume :. Voice volume :. Output sound test :. (-) :. () :. ON. () :. ON. (-)") 남코의 초 울트라 기대작 테일즈 오브 이터니아!! 그간의 테일즈 시리즈...판타지아,데스티 니의 뒤를 잇는 최신작이 드디어 나왔다. CD3장이라는 방대한 용량으로 멋진 그래픽과 탄탄 한 성우진의 보이스가 게임의 재미를 한층 더해줄 것이다. 또 새로운 배틀 시스템은 전잔보 다 더욱 신속한 공격을 할수 있게 도와줄 것이다. 감춰진 모든 베일을 던져 버리고 우리
남코의 초 울트라 기대작 테일즈 오브 이터니아!! 그간의 테일즈 시리즈...판타지아,데스티 니의 뒤를 잇는 최신작이 드디어 나왔다. CD3장이라는 방대한 용량으로 멋진 그래픽과 탄탄 한 성우진의 보이스가 게임의 재미를 한층 더해줄 것이다. 또 새로운 배틀 시스템은 전잔보 다 더욱 신속한 공격을 할수 있게 도와줄 것이다. 감춰진 모든 베일을 던져 버리고 우리
< 목차 > Ⅰ. 연구동기 1 Ⅱ. 연구목적 1 Ⅲ. 연구내용 2 1. 이론적배경 2 (1) 직접제작한물질의기본구조 2 (2) 회절격자의이론적배경 3 (3) X-선회절법-XRD(X-Ray Diffraction) 3 (4) 브래그의법칙 (Bragg`s law) 4 (5)
 직접제작한물질의기본구조 2 (2) 회절격자의이론적배경 3 (3) X-선회절법-XRD(X-Ray Diffraction) 3 (4) 브래그의법칙 (Bragg`s law) 4 (5)") [ 첨부 4] 작품설명서표지서식 작품번호 1143 LASER 의라우에패턴을통한입체모형의구조분석 출품분야물리출품부문학생 2011. 7. 7 구분성명 출품학생 지도교사 김성현 권채련 김서연 전종술 - 1 - < 목차 > Ⅰ. 연구동기 1 Ⅱ. 연구목적 1 Ⅲ. 연구내용 2 1. 이론적배경 2 (1) 직접제작한물질의기본구조 2 (2) 회절격자의이론적배경 3 (3)
[ 첨부 4] 작품설명서표지서식 작품번호 1143 LASER 의라우에패턴을통한입체모형의구조분석 출품분야물리출품부문학생 2011. 7. 7 구분성명 출품학생 지도교사 김성현 권채련 김서연 전종술 - 1 - < 목차 > Ⅰ. 연구동기 1 Ⅱ. 연구목적 1 Ⅲ. 연구내용 2 1. 이론적배경 2 (1) 직접제작한물질의기본구조 2 (2) 회절격자의이론적배경 3 (3)
Microsoft Word - windows server 2003 수동설치_non pro support_.doc
 Windows Server 2003 수동 설치 가이드 INDEX 운영체제 설치 준비과정 1 드라이버를 위한 플로피 디스크 작성 2 드라이버를 위한 USB 메모리 작성 7 운영체제 설치 과정 14 Boot Sequence 변경 14 컨트롤러 드라이버 수동 설치 15 운영체제 설치 17 운영체제 설치 준비 과정 Windows Server 2003 에는 기본적으로
Windows Server 2003 수동 설치 가이드 INDEX 운영체제 설치 준비과정 1 드라이버를 위한 플로피 디스크 작성 2 드라이버를 위한 USB 메모리 작성 7 운영체제 설치 과정 14 Boot Sequence 변경 14 컨트롤러 드라이버 수동 설치 15 운영체제 설치 17 운영체제 설치 준비 과정 Windows Server 2003 에는 기본적으로
Best of the Best Benchmark Adobe Digital Index | APAC | 2015
 v Best of the Best 벤치마크 Adobe Digital Index APAC 2015 ADOBE DIGITAL INDEX Best of the Best 벤치마크 (아시아 태평양 지역) 본 리포트는 아시아 태평양 지역에 있는 기업의 성과를 정리해 놓은 것입니다. 이 리포트를 통해 아시아 태평양 지역의 모바일 마케팅 모범 사례를 살펴볼 수 있습니다.
v Best of the Best 벤치마크 Adobe Digital Index APAC 2015 ADOBE DIGITAL INDEX Best of the Best 벤치마크 (아시아 태평양 지역) 본 리포트는 아시아 태평양 지역에 있는 기업의 성과를 정리해 놓은 것입니다. 이 리포트를 통해 아시아 태평양 지역의 모바일 마케팅 모범 사례를 살펴볼 수 있습니다.
PowerPoint 프레젠테이션
 RecurDyn 의 Co-simulation 와 하드웨어인터페이스적용 2016.11.16 User day 김진수, 서준원 펑션베이솔루션그룹 Index 1. Co-simulation 이란? Interface 방식 Co-simulation 개념 2. RecurDyn 과 Co-simulation 이가능한분야별소프트웨어 Dynamics과 Control 1) RecurDyn
RecurDyn 의 Co-simulation 와 하드웨어인터페이스적용 2016.11.16 User day 김진수, 서준원 펑션베이솔루션그룹 Index 1. Co-simulation 이란? Interface 방식 Co-simulation 개념 2. RecurDyn 과 Co-simulation 이가능한분야별소프트웨어 Dynamics과 Control 1) RecurDyn
BY-FDP-4-70.hwp
 RS-232, RS485 FND Display Module BY-FDP-4-70-XX (Rev 1.0) - 1 - 1. 개요. 본 Display Module은 RS-232, RS-485 겸용입니다. Power : DC24V, DC12V( 주문사양). Max Current : 0.6A 숫자크기 : 58mm(FND Size : 70x47mm 4 개) RS-232,
RS-232, RS485 FND Display Module BY-FDP-4-70-XX (Rev 1.0) - 1 - 1. 개요. 본 Display Module은 RS-232, RS-485 겸용입니다. Power : DC24V, DC12V( 주문사양). Max Current : 0.6A 숫자크기 : 58mm(FND Size : 70x47mm 4 개) RS-232,
FlightGear 2.10
 FlightGear 2.10 FlightGear project 를원할히진행할수있도록설명되있는기술문서입니다. FlightGear 는윈도우, Linux 환경상에서구동할수있는비행 Simulator 프로그램입니다. 2013-05-18 Kim Tae Hoon Documentaion1.1v Language:Ko_kr FlightGear 2.10 1. FlightGear
FlightGear 2.10 FlightGear project 를원할히진행할수있도록설명되있는기술문서입니다. FlightGear 는윈도우, Linux 환경상에서구동할수있는비행 Simulator 프로그램입니다. 2013-05-18 Kim Tae Hoon Documentaion1.1v Language:Ko_kr FlightGear 2.10 1. FlightGear
<4D F736F F D20B1B8C1B6BFAAC7D0325FB0ADC0C7C0DAB7E15F34C1D6C2F75F76332E646F63>
 구조역학 5. 모멘트분배법 (oment Distribution ethod) Objective of this chapter: 모멘트분배법의개념이해와 다차부정정구조물해석에 의적용. What will be presented: 모멘트분배법용어와개념이해 모멘트분배법을 모멘트분배법을 이용한연속보해석 이용한골조해석 Theoretical background 미국 Univ.
구조역학 5. 모멘트분배법 (oment Distribution ethod) Objective of this chapter: 모멘트분배법의개념이해와 다차부정정구조물해석에 의적용. What will be presented: 모멘트분배법용어와개념이해 모멘트분배법을 모멘트분배법을 이용한연속보해석 이용한골조해석 Theoretical background 미국 Univ.
KC CODE KCS 국가건설기준표준시방서 Korean Construction Specification KCS : 2017 상수도공사 공기기계설비 2017 년 8 월일제정 국가건설기준
 KC CODE KCS 57 80 20 국가건설기준표준시방서 Korean Construction Specification KCS 57 80 20 : 2017 상수도공사 공기기계설비 2017 년 8 월일제정 http://www.kcsc.re.kr 국가건설기준 목차 KCS 57 80 20 상수도공사공기기계설비 1. 일반사항 1.1 적용범위,,,,,,, 1.2 참고기준
KC CODE KCS 57 80 20 국가건설기준표준시방서 Korean Construction Specification KCS 57 80 20 : 2017 상수도공사 공기기계설비 2017 년 8 월일제정 http://www.kcsc.re.kr 국가건설기준 목차 KCS 57 80 20 상수도공사공기기계설비 1. 일반사항 1.1 적용범위,,,,,,, 1.2 참고기준
2009_KEEI_연차보고서
 http://www.keei.re.kr KOREA ENERGY ECONOMICS INSTITUTE KEEI ANNUAL REPORT 2010. 5 KOREA ENERGY ECONOMICS INSTITUTE 3 KOREA ENERGY ECONOMICS INSTITUTE 4 KOREA ENERGY ECONOMICS INSTITUTE 5 KOREA ENERGY
http://www.keei.re.kr KOREA ENERGY ECONOMICS INSTITUTE KEEI ANNUAL REPORT 2010. 5 KOREA ENERGY ECONOMICS INSTITUTE 3 KOREA ENERGY ECONOMICS INSTITUTE 4 KOREA ENERGY ECONOMICS INSTITUTE 5 KOREA ENERGY
LM 가이드
 SR B 제품치수제원 치수도, 치수표 SR-W 형, SR-WM 형, SR-V 형, SR-VM 형.. SR-TB 형, SR-TBM 형, SR-SB 형, SR-SBM 형.. 레일의표준길이와최대길이... SR 형의 레일탭타입... 옵션... LaCS 및각종씰부착후 블록치수 (L 치수 ).. SR 형전용자바라 JS 형... SR 형전용자바라 DS 형... SR 형전용
SR B 제품치수제원 치수도, 치수표 SR-W 형, SR-WM 형, SR-V 형, SR-VM 형.. SR-TB 형, SR-TBM 형, SR-SB 형, SR-SBM 형.. 레일의표준길이와최대길이... SR 형의 레일탭타입... 옵션... LaCS 및각종씰부착후 블록치수 (L 치수 ).. SR 형전용자바라 JS 형... SR 형전용자바라 DS 형... SR 형전용
실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터
 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터") 실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터의전면패널에꼽는다. 통상적으로검은색프로브는전면패널의검은단자 (COM) 에꼽으며, 빨간색프로브는빨간색단자에꼽는다.
실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터의전면패널에꼽는다. 통상적으로검은색프로브는전면패널의검은단자 (COM) 에꼽으며, 빨간색프로브는빨간색단자에꼽는다.
6943-427622062-1.pdf
 Owner s manual Kuo+ 폴딩방법 1. 페달을 그림과 같이 접어 줍니다.(A) 2. 핸들바를 아래로 내리기 위해 레버를 엽니다. 3. 이제 핸들 포스트를 아래로 접기 위해, 레버 고정 장치(B)를 돌려서 (C) 레버를 내립니다. 앞바퀴 옆쪽으로 핸들 포스트를 꺽어 접습니다. 4. 한 손으로는 레버 고정 장치를 그림
Owner s manual Kuo+ 폴딩방법 1. 페달을 그림과 같이 접어 줍니다.(A) 2. 핸들바를 아래로 내리기 위해 레버를 엽니다. 3. 이제 핸들 포스트를 아래로 접기 위해, 레버 고정 장치(B)를 돌려서 (C) 레버를 내립니다. 앞바퀴 옆쪽으로 핸들 포스트를 꺽어 접습니다. 4. 한 손으로는 레버 고정 장치를 그림
슬라이드 1
 10. 기본설계도면 016 년상반기 김수영 10-1. 기본설계도면 기본설계도면의내용 선도 (ines 10-1. 기본설계도면 기본설계도면의내용 중앙횡단면도 (Midship Section 10-1. 기본설계도면 기본설계도면의내용 일반배치도 (General Arrangement 10-. 선도의작성 ines 의투영도 10-. 선형의구성 / 특징 선수형상 선박의종류
10. 기본설계도면 016 년상반기 김수영 10-1. 기본설계도면 기본설계도면의내용 선도 (ines 10-1. 기본설계도면 기본설계도면의내용 중앙횡단면도 (Midship Section 10-1. 기본설계도면 기본설계도면의내용 일반배치도 (General Arrangement 10-. 선도의작성 ines 의투영도 10-. 선형의구성 / 특징 선수형상 선박의종류
BN H-00Kor_001,160
 SPD-SHD/SPD-0SHD BN68-008H-00 ..... 6 7 8 8 6 7 8 9 0 8 9 6 8 9 0 6 6 9 7 8 8 9 6 6 6 66 67 68 70 7 7 76 76 77 78 79 80 80 8 8 8 8 8 86 87 88 89 90 9 9 9 9 9 96 96 98 98 99 0 0 0 0 06 07 08 09 0 6 6
SPD-SHD/SPD-0SHD BN68-008H-00 ..... 6 7 8 8 6 7 8 9 0 8 9 6 8 9 0 6 6 9 7 8 8 9 6 6 6 66 67 68 70 7 7 76 76 77 78 79 80 80 8 8 8 8 8 86 87 88 89 90 9 9 9 9 9 96 96 98 98 99 0 0 0 0 06 07 08 09 0 6 6
2 단계 : 추상화 class 오리 { class 청둥오리 extends 오리 { class 물오리 extends 오리 { 청둥오리 mallardduck = new 청둥오리 (); 물오리 redheadduck = new 물오리 (); mallardduck.swim();
; 물오리 redheadduck = new 물오리 (); mallardduck.swim();") 인터페이스적용 오리객체설계하기 ) 청둥오리, 물오리를설계하세요. 1 단계 : 필요한객체설계 class 청둥오리 { class 물오리 { 청둥오리 mallardduck = new 청둥오리 (); 물오리 redheadduck = new 물오리 (); mallardduck.swim(); mallardduck.fly(); mallardduck.quack(); redheadduck.swim();
인터페이스적용 오리객체설계하기 ) 청둥오리, 물오리를설계하세요. 1 단계 : 필요한객체설계 class 청둥오리 { class 물오리 { 청둥오리 mallardduck = new 청둥오리 (); 물오리 redheadduck = new 물오리 (); mallardduck.swim(); mallardduck.fly(); mallardduck.quack(); redheadduck.swim();
 안전확인안전기준 이륜자전거 제 1 부일반용자전거 1. 적용범위 비고 1 2. 관련표준 3. 정의 3.1 일반용자전거 3.2 세이프티훅 3.3 서스펜션훅 3.4 숄더패드 3.5 클리프리스페달 3.6 반사성타이어 3.7 고리모양반사장치 4. 종류및프레임형태 4.1 종류 표 표자전거의종류 비고 4.2 프레임의형태 5. 안전요구사항 5.1 일반 5.1.1 선예부 5.1.2
안전확인안전기준 이륜자전거 제 1 부일반용자전거 1. 적용범위 비고 1 2. 관련표준 3. 정의 3.1 일반용자전거 3.2 세이프티훅 3.3 서스펜션훅 3.4 숄더패드 3.5 클리프리스페달 3.6 반사성타이어 3.7 고리모양반사장치 4. 종류및프레임형태 4.1 종류 표 표자전거의종류 비고 4.2 프레임의형태 5. 안전요구사항 5.1 일반 5.1.1 선예부 5.1.2
BS-K1217-M□□-3012_ProductGuide_KR_PDF
 READER/WRITER MADE IN JAPAN System [ASLINK ] S-K1217-M-3012..,.,....,,. S-K1217-M08-3012 S-K1217-M12-3012 S-K1217-M18-3012 S-K1217-M30-3012 2() () / 1 2 1 DC..,,.,,,..,....... ' ARW-04 (Ver.04-1.01 ),
READER/WRITER MADE IN JAPAN System [ASLINK ] S-K1217-M-3012..,.,....,,. S-K1217-M08-3012 S-K1217-M12-3012 S-K1217-M18-3012 S-K1217-M30-3012 2() () / 1 2 1 DC..,,.,,,..,....... ' ARW-04 (Ver.04-1.01 ),
내지-교회에관한교리
 내지-교회에관한교리 2011.10.27 7:34 PM 페이지429 100 2400DPI 175LPI C M Y K 제 31 거룩한 여인 32 다시 태어났습니까? 33 교회에 관한 교리 목 저자 면수 가격 James W. Knox 60 1000 H.E.M. 32 1000 James W. Knox 432 15000 가격이 1000원인 도서는 사육판 사이즈이며 무료로
내지-교회에관한교리 2011.10.27 7:34 PM 페이지429 100 2400DPI 175LPI C M Y K 제 31 거룩한 여인 32 다시 태어났습니까? 33 교회에 관한 교리 목 저자 면수 가격 James W. Knox 60 1000 H.E.M. 32 1000 James W. Knox 432 15000 가격이 1000원인 도서는 사육판 사이즈이며 무료로
 22-12324-4TEL:3668-3114 FAX:742-3387 TEL:3668-3120 FAX:745-9476 TEL:3668-3109, 2279-0867~8 TEL:3668-3127 TEL:3668-3123, 3128, 3162 www.saeki.co.kr, www.pentaximaging.co.kr Small 의 큰 스타일을 경험하다 당신의 카메라만으로도,
22-12324-4TEL:3668-3114 FAX:742-3387 TEL:3668-3120 FAX:745-9476 TEL:3668-3109, 2279-0867~8 TEL:3668-3127 TEL:3668-3123, 3128, 3162 www.saeki.co.kr, www.pentaximaging.co.kr Small 의 큰 스타일을 경험하다 당신의 카메라만으로도,
TDB 3000 Series Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO
 Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO DRIVER 의장점을일체화저발열및토크특성우수 TDB 000 V 48 바이폴라 (Bipolar) Closed-Loop 스텝모터드라이버
Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO DRIVER 의장점을일체화저발열및토크특성우수 TDB 000 V 48 바이폴라 (Bipolar) Closed-Loop 스텝모터드라이버
RVC Robot Vaccum Cleaner
 RVC Robot Vacuum 200810048 정재근 200811445 이성현 200811414 김연준 200812423 김준식 Statement of purpose Robot Vacuum (RVC) - An RVC automatically cleans and mops household surface. - It goes straight forward while
RVC Robot Vacuum 200810048 정재근 200811445 이성현 200811414 김연준 200812423 김준식 Statement of purpose Robot Vacuum (RVC) - An RVC automatically cleans and mops household surface. - It goes straight forward while
Microsoft PowerPoint - 부교재_자동차생활_34.파워 윈도우,도어록,와이퍼 사용법 [호환 모드]
![Microsoft PowerPoint - 부교재_자동차생활_34.파워 윈도우,도어록,와이퍼 사용법 [호환 모드]](/thumbs/40/20648484.jpg "Microsoft PowerPoint - 부교재_자동차생활_34.파워 윈도우,도어록,와이퍼 사용법 [호환 모드]") 파워 윈도우, 도어록, 와이퍼 사용법 학습 내용 1. 파워윈도우 2. 파워 도어록 장치 및 도어 개폐 방법 3. 윈도우 와이퍼 학습 목표 1. 파워윈도우, 도어록, 와이퍼 기능을 이해하고 사용할 수 있습니다. 본 콘텐츠의 내용은 통상적인 자동차관리에 대한 정보로서, 절대적인 적용기준이 되지는 않습니다. Copyrights c 현대자동차, 무단 전재 및 재배포
파워 윈도우, 도어록, 와이퍼 사용법 학습 내용 1. 파워윈도우 2. 파워 도어록 장치 및 도어 개폐 방법 3. 윈도우 와이퍼 학습 목표 1. 파워윈도우, 도어록, 와이퍼 기능을 이해하고 사용할 수 있습니다. 본 콘텐츠의 내용은 통상적인 자동차관리에 대한 정보로서, 절대적인 적용기준이 되지는 않습니다. Copyrights c 현대자동차, 무단 전재 및 재배포
자유학기제-뉴스레터(6호).indd
.indd") freesem.kedi.re.kr CONTENTS 01 연속기획① : 협업기관에 가다! 예술 체육활동을 동시에 할 수 있는 국민체육진흥공단 에 가다! 02 협업기관을 찾아서 한국문화예술교육진흥원 한국폴리텍대학 03 자유학기제 자율과정 자료집 소개 04 알림 교육부 자유학기제지원센터, 협업기관 소식 꿈과 끼를 키우는 행복교육 자유학기제 Newsletter 알림
freesem.kedi.re.kr CONTENTS 01 연속기획① : 협업기관에 가다! 예술 체육활동을 동시에 할 수 있는 국민체육진흥공단 에 가다! 02 협업기관을 찾아서 한국문화예술교육진흥원 한국폴리텍대학 03 자유학기제 자율과정 자료집 소개 04 알림 교육부 자유학기제지원센터, 협업기관 소식 꿈과 끼를 키우는 행복교육 자유학기제 Newsletter 알림
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론
 이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
특징 찾아보기 열쇠 없이 문을 열 수 있어요! 비밀번호 및 RF카드로도 문을 열 수 있습니다. 또한 비밀번호가 외부인에게 알려질 위험에 대비, 통제번호까지 입력해 둘 수 있어 더욱 안심하고 사용할 수 있습니다. 나만의 비밀번호 및 RF카드를 가질 수 있어요! 다수의 가
 www.kdnetwork.com 특징 찾아보기 열쇠 없이 문을 열 수 있어요! 비밀번호 및 RF카드로도 문을 열 수 있습니다. 또한 비밀번호가 외부인에게 알려질 위험에 대비, 통제번호까지 입력해 둘 수 있어 더욱 안심하고 사용할 수 있습니다. 나만의 비밀번호 및 RF카드를 가질 수 있어요! 다수의 가능할 삭제할 건전지 사용자를 위한 개별 비밀번호 및 RF카드
www.kdnetwork.com 특징 찾아보기 열쇠 없이 문을 열 수 있어요! 비밀번호 및 RF카드로도 문을 열 수 있습니다. 또한 비밀번호가 외부인에게 알려질 위험에 대비, 통제번호까지 입력해 둘 수 있어 더욱 안심하고 사용할 수 있습니다. 나만의 비밀번호 및 RF카드를 가질 수 있어요! 다수의 가능할 삭제할 건전지 사용자를 위한 개별 비밀번호 및 RF카드
View Licenses and Services (customer)
") 빠른 빠른 시작: 시작: 라이선스, 라이선스, 서비스 서비스 및 주문 주문 이력 이력 보기 보기 고객 가이드 Microsoft 비즈니스 센터의 라이선스, 서비스 및 혜택 섹션을 통해 라이선스, 온라인 서비스, 구매 기록 (주문 기록)을 볼 수 있습니다. 시작하려면, 비즈니스 센터에 로그인하여 상단 메뉴에서 재고를 선택한 후 내 재고 관리를 선택하십시오. 목차
빠른 빠른 시작: 시작: 라이선스, 라이선스, 서비스 서비스 및 주문 주문 이력 이력 보기 보기 고객 가이드 Microsoft 비즈니스 센터의 라이선스, 서비스 및 혜택 섹션을 통해 라이선스, 온라인 서비스, 구매 기록 (주문 기록)을 볼 수 있습니다. 시작하려면, 비즈니스 센터에 로그인하여 상단 메뉴에서 재고를 선택한 후 내 재고 관리를 선택하십시오. 목차
내지(교사용) 4-6부
 4-6부") Chapter5 140 141 142 143 144 145 146 147 148 01 02 03 04 05 06 07 08 149 활 / 동 / 지 2 01 즐겨 찾는 사이트와 찾는 이유는? 사이트: 이유: 02 아래는 어느 외국계 사이트의 회원가입 화면이다. 국내의 일반적인 회원가입보다 절차가 간소하거나 기입하지 않아도 되는 개인정보 항목이 있다면 무엇인지
Chapter5 140 141 142 143 144 145 146 147 148 01 02 03 04 05 06 07 08 149 활 / 동 / 지 2 01 즐겨 찾는 사이트와 찾는 이유는? 사이트: 이유: 02 아래는 어느 외국계 사이트의 회원가입 화면이다. 국내의 일반적인 회원가입보다 절차가 간소하거나 기입하지 않아도 되는 개인정보 항목이 있다면 무엇인지
슬라이드 1
 3 장유도전동기의동특성해석법 3-1 αβ좌표계에서 IM의지배방정식 [2] abc 좌표계에서유도전동기전압방정식 1 (1) 유도전동기의전압방정식 dλas dλbs dλcs vas = Ri s as +, vbs = Ri s bs +, vcs = Ri s cs + dt dt dt dλar dλbr dλcr var = Ri r ar +, vbr = Ri r br +,
3 장유도전동기의동특성해석법 3-1 αβ좌표계에서 IM의지배방정식 [2] abc 좌표계에서유도전동기전압방정식 1 (1) 유도전동기의전압방정식 dλas dλbs dλcs vas = Ri s as +, vbs = Ri s bs +, vcs = Ri s cs + dt dt dt dλar dλbr dλcr var = Ri r ar +, vbr = Ri r br +,
교육실습 소감문
 컴퓨터교육과 2008312140 김경근 Ⅰ. 처음... 이번에 교육실습을 다녀온 곳은 서울에 위치한 노원고등학교, 나의 모교이다. 실 습 학교로 굳이 이 학교를 선택 지원한 이유는, 모교이기 때문 이 아니라 집에서 가까워서 라는 이유가 컸다. 물론 내가 졸업한 모교가 어떻게 변했을지도 궁금하기 도 했다. 실습을 시작하기 전만 해도 오로지
컴퓨터교육과 2008312140 김경근 Ⅰ. 처음... 이번에 교육실습을 다녀온 곳은 서울에 위치한 노원고등학교, 나의 모교이다. 실 습 학교로 굳이 이 학교를 선택 지원한 이유는, 모교이기 때문 이 아니라 집에서 가까워서 라는 이유가 컸다. 물론 내가 졸업한 모교가 어떻게 변했을지도 궁금하기 도 했다. 실습을 시작하기 전만 해도 오로지
Microsoft Word - Lab.7
 Lab. 1. I-V C Lab. 7. Characterist tics of a Dio 능동필터 ode 1. 실험목표 연산증폭기를이용한저역통과필터 (low-pass filter), filter), 대역통과필터 (band-pass filter) 회로를구성, 연산증폭기능동필터회로를이해 고역통과필터 (high-pass 측정및평가해서 2. 실험회로 A. 연산증폭기능동필터
Lab. 1. I-V C Lab. 7. Characterist tics of a Dio 능동필터 ode 1. 실험목표 연산증폭기를이용한저역통과필터 (low-pass filter), filter), 대역통과필터 (band-pass filter) 회로를구성, 연산증폭기능동필터회로를이해 고역통과필터 (high-pass 측정및평가해서 2. 실험회로 A. 연산증폭기능동필터
<INPUT DATA & RESULT / 전단벽 > NUM NAME tw Lw Hw 철근 위치 Pu Mu Vu RESULT (mm) (mm) (mm) 방향 개수 직경 간격 (kn) (kn-m)
 (mm) (mm) 방향 개수 직경 간격 (kn) (kn-m)") 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 NUM NAME tw Lw Hw 철근 위치 Pu Mu Vu RESULT (mm) (mm) (mm) 방향 개수 직경 간격 (kn) (kn-m) (kn) 휨 전단 축력 종합 1 2W1 300 3400 4500 수직 2EA- D13 @150
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 NUM NAME tw Lw Hw 철근 위치 Pu Mu Vu RESULT (mm) (mm) (mm) 방향 개수 직경 간격 (kn) (kn-m) (kn) 휨 전단 축력 종합 1 2W1 300 3400 4500 수직 2EA- D13 @150
Microsoft PowerPoint 상 교류 회로
 3상교류회로 11.1. 3 상교류의발생 평등자계중에놓인회전자철심에기계적으로 120 씩차이가나게감은코일 aa, bb,cc 를배치하고각속도의속도로회전하면각코일의양단에는다음식으로표현되는기전력이발생하게된다. 11.1. 3 상교류의발생 여기서 e a, e b, e c 는각각코일aa, bb, cc 양단에서얻어지는전압의순시치식이며, 각각을상 (phase) 이라한다. 이와같이전압의크기는같고위상이
3상교류회로 11.1. 3 상교류의발생 평등자계중에놓인회전자철심에기계적으로 120 씩차이가나게감은코일 aa, bb,cc 를배치하고각속도의속도로회전하면각코일의양단에는다음식으로표현되는기전력이발생하게된다. 11.1. 3 상교류의발생 여기서 e a, e b, e c 는각각코일aa, bb, cc 양단에서얻어지는전압의순시치식이며, 각각을상 (phase) 이라한다. 이와같이전압의크기는같고위상이
COMFILE_VOL13_20140204.cdr
 "다양한 산업현장에서 쓰이고 있는 컴파일 제품" 데이터 수집 데이터 수집용 필드 I/O 제품 "모드포트" 필드 I/O 전력 모니터링 로봇 제어 태양광 발전 트랙커 제어 CUPC-P80 CT1721C CB405 포장기 화력발전소-화력 감지 시스템 녹방지장치(용존산소제거장치) CT1721C CB280, CLCD-216 CUWIN3500 일회용 용기 성형기 항온항습기
"다양한 산업현장에서 쓰이고 있는 컴파일 제품" 데이터 수집 데이터 수집용 필드 I/O 제품 "모드포트" 필드 I/O 전력 모니터링 로봇 제어 태양광 발전 트랙커 제어 CUPC-P80 CT1721C CB405 포장기 화력발전소-화력 감지 시스템 녹방지장치(용존산소제거장치) CT1721C CB280, CLCD-216 CUWIN3500 일회용 용기 성형기 항온항습기
PowerPoint Presentation
 디지털 CMOS 인버터의동작및특성 IT CookBook, 최신 VLSI 설계, 조준동, 성균관대학교 학습목표 CMOS 인버터의동작과구조를익힌다. CMOS 인버터의출력전류, 출력전압의특성을알아본다. 노이즈마진을구한다. 목차 1.CMOS 인버터의동작및구조 2.CMOS 인버터의출력전류 / 전압특성 Section 01 CMOS 인버터의동작및구조 1.1 CMOS 인버터의동작.
디지털 CMOS 인버터의동작및특성 IT CookBook, 최신 VLSI 설계, 조준동, 성균관대학교 학습목표 CMOS 인버터의동작과구조를익힌다. CMOS 인버터의출력전류, 출력전압의특성을알아본다. 노이즈마진을구한다. 목차 1.CMOS 인버터의동작및구조 2.CMOS 인버터의출력전류 / 전압특성 Section 01 CMOS 인버터의동작및구조 1.1 CMOS 인버터의동작.
슬라이드 1
 tress and train I Metal Forming CAE La. Department of Mechanical Engineering Geongsang National Universit, Korea Metal Forming CAE La., Geongsang National Universit tress Vector, tress (Tensor) tress vector:
tress and train I Metal Forming CAE La. Department of Mechanical Engineering Geongsang National Universit, Korea Metal Forming CAE La., Geongsang National Universit tress Vector, tress (Tensor) tress vector:
PowerPoint 프레젠테이션
 03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
온습도 판넬미터(JTH-05) 사양서V1.0
 사양서V1.0") 온습도 조절기 Model:JTH-05 1. 제품 사양. [제품 구분] JTH-05A(입력 전원 AC), JTH-05D(입력 전원 DC) [전원 사양] JTH-05A 입력 전압 출력 전원 소비 전력 JTH-05D AC 90~240V DC 10~36V 12Vdc / Max.170mA Max.2W [본체 사이즈] ~ 온/습도 범위(본체): 사용 [0 ~ 50, 85%RH
온습도 조절기 Model:JTH-05 1. 제품 사양. [제품 구분] JTH-05A(입력 전원 AC), JTH-05D(입력 전원 DC) [전원 사양] JTH-05A 입력 전압 출력 전원 소비 전력 JTH-05D AC 90~240V DC 10~36V 12Vdc / Max.170mA Max.2W [본체 사이즈] ~ 온/습도 범위(본체): 사용 [0 ~ 50, 85%RH
실감미디어 제작 전문인 과정 1기 결과보고서
 관리번호 Ⅰ 사업개요 1. 사업목적 산업 분야에 디바이스, 콘텐츠 개발 를 지원하여 사업성과 확산 과 새로운 BM 개발 2. 지원분야 지정과제 과제 번호 과제명 지원금 16-001 모션플랫폼(6DOF)을 활용한 VR 시제품 개발 8천만원 이내 16-002 인터랙티브 가능한 360도 홀로그램 쇼케이스 시제품 개발 4천만원 이내 16-003 HMD와 트레드밀을
관리번호 Ⅰ 사업개요 1. 사업목적 산업 분야에 디바이스, 콘텐츠 개발 를 지원하여 사업성과 확산 과 새로운 BM 개발 2. 지원분야 지정과제 과제 번호 과제명 지원금 16-001 모션플랫폼(6DOF)을 활용한 VR 시제품 개발 8천만원 이내 16-002 인터랙티브 가능한 360도 홀로그램 쇼케이스 시제품 개발 4천만원 이내 16-003 HMD와 트레드밀을
표지 모았어요
 From Bridgestone 4 BRIDGESTONE Magazine Contents On Bridgestone 04 10 12 24 46 48 52 54 56 57 60 Motoring 14 18 20 26 28 32 59 62 Travel / Lifestyle 34 38 44 Section 08 58 63 6 BRIDGESTONE Magazine News
From Bridgestone 4 BRIDGESTONE Magazine Contents On Bridgestone 04 10 12 24 46 48 52 54 56 57 60 Motoring 14 18 20 26 28 32 59 62 Travel / Lifestyle 34 38 44 Section 08 58 63 6 BRIDGESTONE Magazine News
REVIEW CHART 1
 Rev.3, 27. October 2017 구교 2017. 10. 27 한국철도시설공단 REVIEW CHART 1 1 2 θ 3 θ θ 4 5 knm 6 7 8 9 10 11 K V K h K s 12 상재하중 복토중량 암거중량 측면마찰력 양압력 13 14 15 16 17 18 19 θ =80 ~90 L 1 L2 L1 L=2L +L 1 2 L1
Rev.3, 27. October 2017 구교 2017. 10. 27 한국철도시설공단 REVIEW CHART 1 1 2 θ 3 θ θ 4 5 knm 6 7 8 9 10 11 K V K h K s 12 상재하중 복토중량 암거중량 측면마찰력 양압력 13 14 15 16 17 18 19 θ =80 ~90 L 1 L2 L1 L=2L +L 1 2 L1
슬라이드 1
 1. 서론 수리학의정의 수리학 (hydraulics) 또는수리공학 (hydraulic engineering) 은유체 (liquid) 특히물의역학을다루는분야로물의기본성질및물과물체간에작용하는힘뿐만아니라물과관련된구조물이나시스템의계획및설계를연구하는응용과학의한분야이다. 1 장강의내용 - 유체의정의 - 물의상태변화 - 차원및단위 - 점성 - 밀도, 단위중량및비중 - 표면장력및모세관현상
1. 서론 수리학의정의 수리학 (hydraulics) 또는수리공학 (hydraulic engineering) 은유체 (liquid) 특히물의역학을다루는분야로물의기본성질및물과물체간에작용하는힘뿐만아니라물과관련된구조물이나시스템의계획및설계를연구하는응용과학의한분야이다. 1 장강의내용 - 유체의정의 - 물의상태변화 - 차원및단위 - 점성 - 밀도, 단위중량및비중 - 표면장력및모세관현상
<4D F736F F F696E74202D20B8B6C0CCC5A9B7CEC7C1B7CEBCBCBCAD202834C1D6C2F7207E2038C1D6C2F729>
 8주차중간고사 ( 인터럽트및 A/D 변환기문제및풀이 ) Next-Generation Networks Lab. 외부입력인터럽트예제 문제 1 포트 A 의 7-segment 에초시계를구현한다. Tact 스위치 SW3 을 CPU 보드의 PE4 에연결한다. 그리고, SW3 을누르면하강 에지에서초시계가 00 으로초기화된다. 동시에 Tact 스위치 SW4 를 CPU 보드의
8주차중간고사 ( 인터럽트및 A/D 변환기문제및풀이 ) Next-Generation Networks Lab. 외부입력인터럽트예제 문제 1 포트 A 의 7-segment 에초시계를구현한다. Tact 스위치 SW3 을 CPU 보드의 PE4 에연결한다. 그리고, SW3 을누르면하강 에지에서초시계가 00 으로초기화된다. 동시에 Tact 스위치 SW4 를 CPU 보드의
LM 가이드
 SSR 볼리테이너타입 가이드 B 제품치수제원 치수도, 치수표 SSR-XW 형, SSR-XWM 형... SSR-XV 형, SSR-XVM 형... SSR-XTB 형... 레일의표준길이와최대길이... SSR 형의 레일탭타입... 옵션... LaCS 및각종씰부착후 블록치수 (L 치수 ).. LaCS 부착후의그리스니플증가치수.. LiCS 부착후의 블록치수 (L 치수
SSR 볼리테이너타입 가이드 B 제품치수제원 치수도, 치수표 SSR-XW 형, SSR-XWM 형... SSR-XV 형, SSR-XVM 형... SSR-XTB 형... 레일의표준길이와최대길이... SSR 형의 레일탭타입... 옵션... LaCS 및각종씰부착후 블록치수 (L 치수 ).. LaCS 부착후의그리스니플증가치수.. LiCS 부착후의 블록치수 (L 치수
2_안드로이드UI
 03 Layouts 레이아웃 (Layout) u ViewGroup의파생클래스로서, 포함된 View를정렬하는기능 u 종류 LinearLayout 컨테이너에포함된뷰들을수평또는수직으로일렬배치하는레이아웃 RelativeLayout 뷰를서로간의위치관계나컨테이너와의위치관계를지정하여배치하는레이아웃 TableLayout 표형식으로차일드를배치하는레이아웃 FrameLayout
03 Layouts 레이아웃 (Layout) u ViewGroup의파생클래스로서, 포함된 View를정렬하는기능 u 종류 LinearLayout 컨테이너에포함된뷰들을수평또는수직으로일렬배치하는레이아웃 RelativeLayout 뷰를서로간의위치관계나컨테이너와의위치관계를지정하여배치하는레이아웃 TableLayout 표형식으로차일드를배치하는레이아웃 FrameLayout