제 2 회경상남도지사배국제신비차 ( 新飛車, Flying Car) 경연대회최종보고서 소속성균관대학교 지도교수김훈모 인 팀장양승웅 인 외 명
|
|
|
- 승민 한
- 6 years ago
- Views:
Transcription
1 제 2 회경상남도지사배국제신비차 ( 新飛車, Flying Car) 경연대회최종보고서 소속성균관대학교 지도교수김훈모 인 팀장양승웅 인 외 명

2 1. 설계개념 (1) 임무분석 a) 주행임무 - 본팀의차량은 VTOL 기체로서주행모드에서는전폭 m, 전장 m, 전고 m, 휠베이스 m 크기의기체로주동력원은 BLDC모터 2개를이용하고, 조향은서보모터를이용한다. 그림 1. 주행코스그림 - 주행코스 : 주행코스는최외곽코스를 A 지점에서시작하여 B 지점을끝으로한바퀴 를통과한다. 가장쉬운구간이므로빠르게통과하도록한다. - 제동코스 : 주행코스를완주한후에 B 지점에서제동을하여 C 지점을지나가기전에 기체를제동시킨다. 주행코스에서빠르게달리는만큼제동거리가길어지므로미리 A 지점 부터감속을하여제동거리가짧아지도록해야한다. - 경사로 : C 지점에서정지로 H-I 코스로이어지는낮은경사로를오른뒤, 경사로에서잠 시정지후조향코스를향해다시출발한다. - 조향코스 : 조향코스의구성은좌, 우로급격하게꺾이는코스 (J-K-L) 를지나회전하는코스 (L-M-O-M-N) 를지난뒤완만한코스 (N-P-Q) 를지나는것으로완료된다. 이때최소한으로요구되는코스의회전반경을자동차최대조향각도에반영하여충분히기체가미끄러지지않고코스를주행할수있도록조종기를미리설정해두어야한다. - 뛰어넘기코스 : R지점에도달한기체를주행모드에서비행모드로변경시킨다. 호버링으로상승한뒤에 S지점까지직선이동한후에다시착륙하여주행모드로변경시킨다. 이때비행을위한배터리는작은용량을장착하여주행용으로쓰이는배터리의무게가비행안정성에방해가되지않도록해야한다.
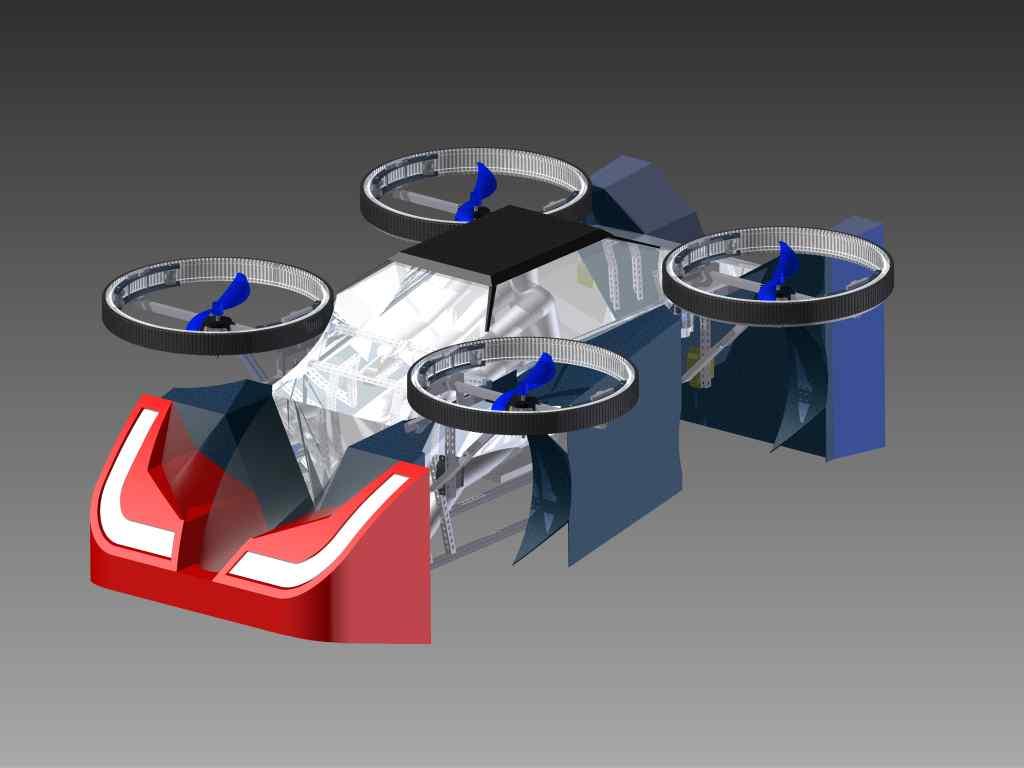
3 - 주행코스 2 : 급격히꺾이는코스가한군데존재하는 S-T-F-G-A-B 코스를주행한 다. 급격한코너의통과를위해느린속도로천천히통과하여야한다. - 주차코스 : B 에서 C 를향하여조금주행한뒤에후진으로 U 지점까지도착하면주차코 스를끝으로주행임무가완료된다. b) 비행임무 - 본팀의차량은비행모드에서전폭 m, 전장 m, 무게 kg 이다. 추력은 BLDC 모터 2x4 개 가 X 모양형태로구성된다엽비행체이다. 그림 2. 비행코스 ( 좌 : 기본비행 / 우 : 코스비행 ) - 기본비행 : 우선 1-6 으로호버링하여정지비행후에 로이어기는기본 비행코스를통과한다. 다엽비행체에기체의무게가상당하므로빠른이동보다는천천히 정확한비행을하도록한다. - 코스비행 : 기본비행을마친뒤 5 에서 3 으로대각선이동후다시 2 로이동하여 4 로대 각선비행, 5 를지나다시 1 로착륙하는것으로비행성능테스트가완료된다. 자세제어가 비교적정확한 V-tol 의장점을살려정확한코스를주행하는것을목표로한다. (2) 설계목표 - 형태 : 본팀의경우도로주행중교통혼잡상황에서수직으로상승하여비행하는형태가이상적인 flying car의동작이라고판단하여 "VTOL+Roadable" 로선택하여임무를수행한다. - 휠형상 : 휠의내부가비어있는 ' 허브리스휠 ' 을채택한다. 내부에비행구동장치를장 착하여공간낭비를최소화한다. - 비행방식 : 8 개의모터를 2 개씩 4 개배치하여안정적이고, 높은추력을낼수있는 X8 다엽비행체를기본으로한다.


4 - 모드변환 : 주행모드에서비행모드로변환시허브리스휠이수직으로 90도회전하여프로가드의역할을수행한다. 이를통해모드변경시에필요한공간활용을최대화하고추후실제 PAV 제작시에운전자를위한공간활용에우위를점할수있다. 또한모드의변환은자동적으로실행되며비교적빠른시간내에완료되는것을목표로한다. 그림 3. 설계주안점도표 (3) 디자인의미 그림 4. 디자인의의미





5 - 허브리스휠의사용이유 우선허브리스휠의사용시장점은다음과같이정리해볼수있다. 그림 5 허브리스의예시ㄱ. unsprung mass의감소 : 휠내부가비어있어 unsprung mass가감소한다. ㄴ. 힘과응력집중의감소 : 기존의차량은횡방향의축으로모든힘이전달되기때문에이부분에많은힘과응력이집중된다. 하지만허브리스휠의경우이축이없기때문에힘과응력집중이감소된다. ㄷ. 브레이크성능의증가 : 휠의내부가비어있어브레이크작동에따른열의방출이쉽고, 내부의많은공간에브레이크디스크를추가로장착하면 20~100% 의성능향상이있다. ㄹ. 높은개발잠재력 : 아직개발초기단계로앞으로더발전할가능성이높다. ㅁ. 미적아름다움 무엇보다도허브리스휠의가장큰장점은 공간의활용성 이다. 이미기존의플라잉카는주행부분과비행부분이분리된형태이므로기체의무게가늘어나는동시에탑승자의공간또한좁아지게된다. 우리가제작한기체의디자인은허브리스휠내부의공간에비행을위한동력원이들어가므로기존의차모양을유지하면서내부의자용자의탑승공간을크게할수있으므로다른신비차와다른차별성을가질수있다. 그림 6 트렌지션의모습과 S-Rover 의비교모습
 비행모드설계 a) 외형설계및성능 / 조종안정성해석 - 비행모드외형본기체는 X8, 즉 8개의프로펠러를 2개씩겹쳐서 X자의형태를만든다. 상하프로펠러의회전방향은서로반대방향이며, 바람의방향은같은아래방향을향하도록시계방향으로도는모터에는역피치를, 반시계방향으로도는모터에는정피치를장착하여사용한다. 이때바퀴는프롭가드의역할을한다.")
6 - 주행, 비행모드의변신 그림 7 S-rover 와영화백투더퓨처의타이머신자동차 허브리스휠을리니어엑츄에이터를이용하여프롭가드로전환시키는일은영화백투더퓨처의바퀴가내려앉으며비행모드로변신하는모습에서아이디어를얻어차용하였다. 이러한방식을차용하면서얻을수있는장점은공간활용을최대화하고, 일반적인플라잉카에기대되는형태를충족시키며심미적욕구도충족시킬수있다는것이다. 2. 형상설계 (1) 비행모드설계 a) 외형설계및성능 / 조종안정성해석 - 비행모드외형본기체는 X8, 즉 8개의프로펠러를 2개씩겹쳐서 X자의형태를만든다. 상하프로펠러의회전방향은서로반대방향이며, 바람의방향은같은아래방향을향하도록시계방향으로도는모터에는역피치를, 반시계방향으로도는모터에는정피치를장착하여사용한다. 이때바퀴는프롭가드의역할을한다.

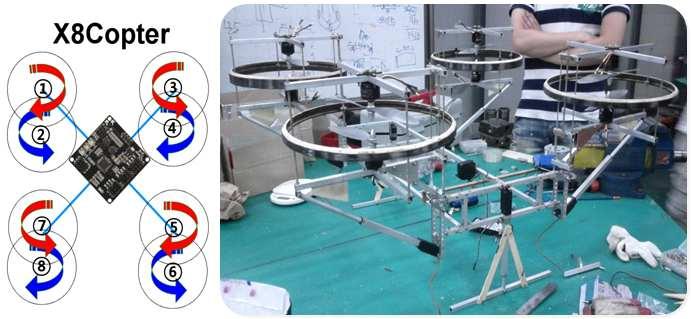

7 그림 8 모델링으로구현된비행모드모습 그림 9 X8 콥터의개략도와실제 S-Rover 의모습 - 비행자세제어보드 그림 10 FlyCam MultiCopter Blackboard
8 비행용제어보드는 FlyCam MultiCopter Blackboard 를사용하였다. 비행자세제어를이용한보드의설계는많은시간과노력을요하고, 기존의상용보드보다더좋은성능을보여주는보드를만들기어렵다는전제하에시중에서구매할수있는보드를사용하였다. 이보드는최대 12개의모터나서보를제어할수있는보드로여러가지형태의멀티콥터를제어가능하도록만들어진보드이다. - 비행특성 그림 11 S Rover 의비행 -> 이착륙 호버링시, 8 개의프로펠러가같은속도로같은추력을내게되며, 차체 무게보다큰추력을낼경우에는상승, 무게보다적은추력을내는경우는하강, 무게와같은추력을내는경우에는호버링을하게된다. -> 순항 8개의프로펠러중후방의 4개프로펠러, 즉 1,2,3,4 번프로펠러보다 5,6,7,8 프로펠러의속도를더높여서추력을크게할경우본기체가앞으로기울어지게된다. 이때자이로센서가내장된제어보드에서일정한각도를유지할수있도록한다. 그러면무게와상승방향추력은상쇄되며합력이 0이되며고도를유지하게된다. 하지만기울어진상태에서전방을향하는수평힘에의해기체가순항할수있게된다. -> 선회는프로펠러의회전이있을때그반력으로프로펠러가기체를회전시키려고하는힘을이용한다. 반시계방향으로회전하는 3,7,2,6번의프로펠러를 1,5,4,8번프로펠러보다빠르게회전시킬경우프로펠러가기체를시계방향으로돌리려는힘이커져기체는시계방향으로선회할수있게된다. 반면시계방향으로회전하는 1,5,4,8번프로펠러를반시계방향으로회전하는 3,7,2,6번프로펠러보다
 동력장치설계 - 모터, 프로펠러 그림 12. Flycam 1000 본기체에사용된모터는 Flycam 1000이라는제품으로최대추력이 1.5kg 인제품이다. 본기체에는 8개의프로펠러가장착되므로이론상최대추력은 12kg 이다.")
 를지원하는게좋다. 이러한기준으로선택한변속기는 Maytech LV-50A SBEC(2~6 Lipo)ESC이다. 지원하는배터리셀수는 2~6개이다. 최대 70A까지전류를버텨주고, 헬기용이므로잦은모터스피드의변화를잘버텨줄수있다. 본기체의비행용배터리의전압인 14.")
9 빠르게회전시킨다면기체가반시계방향으로회전시키려는힘이커져서기체가 반시계방향으로선회하게된다. - 비행안정성 기본적으로자이로센서를내장하고있는 FlyCam MultiCopter Blackboard 의마이크로 프로세서 Atmega 168 에는기체의기울기값을입력받아서기체를안정시키는프로그램이 내장되어있다. 따라서어떤특정요인에의해서보드나변속기, 모터, 프로펠러등비행에 필수적인부품들의파손이없다면비행의안정성은확보되었다고할수있다. b) 동력장치설계 - 모터, 프로펠러 그림 12. Flycam 1000 본기체에사용된모터는 Flycam 1000이라는제품으로최대추력이 1.5kg 인제품이다. 본기체에는 8개의프로펠러가장착되므로이론상최대추력은 12kg 이다. 또한프로펠러는회전방향이상하달라야하므로정피치와역피치를모두사용하여야한다. 또한프로펠러는 Flycam1000과최상의조화를이루면서본기체의허브리스바퀴안쪽에들어가는최대크기인 10inch를만족하는프로펠러인 APC 10x4.7을선정하였다. - 변속기 다엽비행체는좋은변속기를선택하는것이필수적이다. 다엽비행체에사용할변속기를 선택하는기준은다음과같다고한다. 1. 타이밍설정에 Auto 를지원하여야한다. 2. 해상도가좋아야한다. 3. 멀티콥터에서제어하는최고속도 (495Hz) 를지원하는게좋다. 이러한기준으로선택한변속기는 Maytech LV-50A SBEC(2~6 Lipo)ESC이다. 지원하는배터리셀수는 2~6개이다. 최대 70A까지전류를버텨주고, 헬기용이므로잦은모터스피드의변화를잘버텨줄수있다. 본기체의비행용배터리의전압인 14.8V로사용가능한사양이며, FlyCam MultiCopter Blackboard에서나온신호와전원보드에서나온전원을조절하여각프로펠러에한개씩총 8개의변속기가달려프로펠러의속도를조절할수있게해준다.


10 그림 13 비행에사용되는변속기 - 배터리본기체의비행모드의배터리는 4S 14.8V 25C 5000mah 2개전지로효율이높은리튬폴리머방식의배터리이다. 또한방전율도 25C로높은방전률을가지고있어서큰추력이필요한본기체에적절한사양이다. 또한 2개의배터리를장착하므로뒷바퀴에달리는두개의주행모터무게로인한무게중심변화를보상해줄수있고, 비행안정성에도움을줄수있다. - 추력특성프로펠러 8개가동축반전으로 2개씩 X자의형태를나타내므로 8개의프로펠러를모두다른평면에배치하는것보다는반대방향으로회전하는프로펠러에의해생기는와류로인해효율이떨어지는경향이있다. 하지만상대적으로작은프로펠러를달수있기때문에큰무게를들면서허브리스바퀴안에프로펠러가위치하는본 FlyingCar에는큰추력을낼수있는동축반전방식이적절하기에동축반전으로 8개의프로펠러를구성하였다. c) 비행조종장치설계 - 조종방식 (Control effector) 설계현재시점까지비행에사용되는조종기는 Futaba T7CHP모델이다. 본조종기는 72MHz 주파수대역대가가능한조종기이다. 최대 7CH까지송신이가능한조종기이며, 본기체를조종시에는 4개의채널을사용하게된다. 물론다엽비행체에요구되는주파수로는적합하지않다. 추가지원금을받게되는 2.4GHz 주파수를사용하는조종기로교체할예정이다. 그림 14 Futaba T7CHP
11 1CH 2CH 3CH 4CH aileron으로기체의 roll을담당하는채널이다. 즉기체의좌우기울기 정도를조절할수있어수평이동이가능하게한다. elecator로기체의 pitch를조절하는채널로기체를전후방으로기울게 해서전후방으로순항할수있게한다. throttle로 8개의프로펠러의속도를조절할수있는데 8개의프로펠러 의회전속도를동시에올릴경우에호버링을할수있으며이 착륙도가 능하다. rudder로기체의회전을담당하는채널로기체를시계방향, 또는반시 계방향으로회전할수있게해준다. - 주파수 Ch. MHz Ch. MHz 그림15. 72MHz 사용범위 조정기의특성상 50MHz 와 72MHz 의대역대둘다사용가능하나 72MHz 대역대를사용하
 그림 16.")

12 고있으며, 72MHz 안에도많은다른주파수가존재하기때문에대회참가팀들과혼선가 능성은없다고할수있다. 또한추가지원금을받을수있다면 2.4GHz 를이용하는조종기 로교체할예정이다. - 안정성증대시스템 (gyro) 그림 16. Gyroscope 비행용제어보드 FlyCam MultiCopter Blackboard 에포함된 MEMS gyro 는본 기체의안정성을높여주는핵심부품이다. 3 축센서가있는 MEMS gyro 는 Yaw Axis, Roll Axis, Pitch Axis 를가지고있으며초기값을조절가능한방식이다. d) 레이아웃및서브시스템 - 중량 그림 17. 중량측정모습
13 카울을제외한비행시필요한기자재를장착한후측정한기체의무게는 5kg 내외이다. 예 상추력은 6kg 이고, 대회전까지경량화작업과세부조정을통해 4kg 후반대로줄일수있 다면충분히효율적인비행을할수있을것이라예상된다. - 무게중심 S Rover의차량의무게중심은 Hubless부에집중이되어있는형태이긴하지만정사각형에가까운구조이기때문에이론적으론차량의무게중심이중앙에놓이게된다. 하지만제작중에생기는작은공차들이모여서무게중심이정확하게중심에오지못하는부분이생겼고이부분은유동적으로옮길수있는무게 ( 베터리 ) 를조정하여비행모드시에무게중심을차체의중심에위치하도록하였다. - 자동랜딩기어 그림 18. 자동랜딩기어자동랜딩기어부분을구성하는데 Linear actuator를사용하였다. 스트로크가최대 140mm가늘어나는 Linear actuator를이용하였고이를차체에수직으로장착하여차체를들어올리는방식으로자동랜딩기어를구성하였다. 자세한설명은아래주행부분모드변환섹션에나타나있다. - 모드변환장치모드변환을하는데필요한휠의 90 의위상차이를만들어주기위해서 Linear actuator 를사용하였다. Linear actuator를휠과바디에각각 1점씩지지하고늘어나는스트로크를계산하여 90 의위상차를주었다. (2) 주행모드설계 a) 외형 (Body) 설계



14 - 탑승공간 그림 19. 기체의주행모드시탑승공간 본차량을설계하면서 R/C스케일이아닌실제스케일을고려하였을때, 얼마나많은공간을사용할수있는지고찰해보았다. 위그림에서완성모델링형태에가상의탑승자를모델링하여탑승위치에배치해보았다. 배치를해볼때, 1인용차량이라고생각하고탑승자를배치했고그결과 1인의탑승자가온전하게탑승하는것이가능했고별도의공간이남아화물적재공간으로이용이가능할것으로판단되었다. 탑승자를 1인으로고정하지않은상태를생각해보아도 Hubless 휠에서비행과주행부의공간소비를해결할수있었기때문에기존의차량과동일하거나그이상의공간의활용이가능할것으로예상할수있다. - 탑승편의성본차량의뛰어난공간활용성은탑승의편의성과직결된다. 기존의차량의디자인을그대로사용가능하다는장점으로인해전형적인세단방식의 4도어의형태는물론이고해치백, 쿠페형식의다양한차량의형태로 Flying Car를구현할수있다. 특히전원소스로전기배터리를사용한다면엔진룸과같은별도의공간활용이필요없게될것이며, 만약타동력원을사용하게된다고해도 Hubless 디자인의특성상공간의활용성은더욱두드러지게될것이다. - 시야 그림 20. 주행시탑승자의시야각

 동력장치 (Power train) 설계 - 주동력장치주행모드에서사용되는미니모터는 VTX-KOREA AP-370N 미니모터이다. 미니모터두개를뒷바퀴상단에각각장착하는구조이다.")
15 구조상으로차량과동일한형태를취할수있는장점으로인해시야각의확보또한자유롭다. 위의그림에서보는것과같이상하 16도, 좌우 59.60도의시야확보가가능하다. 하지만이는차량의바디를기준으로한것으로유동적인측면이있다. 다만시야의확보측면에서 Hubless system의채택으로휠이커진측면이있고이런큰휠이시야를방해할수도있을것이다. 이런문제는실제차량스케일로차량이커질때, 동력원의크기가 1:1의사이즈로늘어나지않는특성으로인해상쇄될수있을것이다. - 점등장치 그림 21. 주행에서점등장치의설치위치 앞에서언급했듯이주행모드일때바디밖으로돌출되는부분이없는특성때문에점등 장치를부착하는데방해되는요인이없다. - 미러위치확보등 R/C스케일모델에서는바디에비해서휠이크기때문에미러위치가일반차량보다조금더위쪽으로장착될수밖에없다. 하지만실스케일로판단한다면이문제또한위에서언급한것과같이상쇄될수있는요인이다. b) 동력장치 (Power train) 설계 - 주동력장치주행모드에서사용되는미니모터는 VTX-KOREA AP-370N 미니모터이다. 미니모터두개를뒷바퀴상단에각각장착하는구조이다. 다음은모터와모터가기체에달리는위치를나타낸사진이다. 기어박스는 Tamiya Planetary Gear Box 이다. 이기어박스는 planetary 기어단을조합하여다양한기어비를만들수있고, 기어구조의특성상고속회전하는모터의동력을기어가어긋남없이정확히전달해줄수있다.
 / 기어박스 ( 우 ) 기어박스장착모습 ( 하단 ) -")

16 그림 22. 미니모터 ( 좌 ) / 기어박스 ( 우 ) 기어박스장착모습 ( 하단 ) - 동력전달구조동력의전달은뒷바퀴각각에장착된브러쉬모터를체인을통해아래쪽축으로전달한뒤풀리를회전시켜허브리스바퀴내부에부착한타이밍벨트를구동하는방식으로바퀴에동력을전달한다. 하나의큰모터를사용하는대신두모터를비행동력부에분산배치하는방식은비행의안정성에큰기여할수있다. 또한바퀴를들어올려모드가전환되는방식의특성상기존 RC카의차동기어를사용할수없었기에이러한방식을사용할수밖에없었다. 아래사진은기체에사용되는동력전달부를찍은사진이다. 그림 23. 동력전달구조사진
 샤시 (Chassis) 설계 - 메인프레임메인프레임을설계에서가장큰어려움은주행과비행에서요구되는프레임의특성사이에서발생되는모순이다. 주행모드에서는현가장치와같은유격을프레임에부여해야하고, 비행모드에서는프롭의위치가프레임에단단히고정되어야한다. 이러한두모순을잘절충하는것이샤시디자인의가장큰고려사항이었다. 최종적으로적용된샤시의모습은다음과같다.")
17 - 변속장치주행에사용되는변속장치는 VTX-KOREA 370,380급미니변속기이다. 주행용모터와같이추천되는제품이며제원은아래에나타나있다. 전후진겸용이며두개의모터네각각이변속기와연결된다. 차동제어를위해각각의신호를제어하는구조를구상중이다. 그림 24. 변속기와변속기제원 c) 샤시 (Chassis) 설계 - 메인프레임메인프레임을설계에서가장큰어려움은주행과비행에서요구되는프레임의특성사이에서발생되는모순이다. 주행모드에서는현가장치와같은유격을프레임에부여해야하고, 비행모드에서는프롭의위치가프레임에단단히고정되어야한다. 이러한두모순을잘절충하는것이샤시디자인의가장큰고려사항이었다. 최종적으로적용된샤시의모습은다음과같다. - 조향장치 ( 아커만 - 장토법 ) 차량의모든부분을직접제작하였기때문에안정적인조향을위해서실제차에적용되는이론을적용하여디자인하였다. 각타이어의회전면과진행방향을일치시키기위해서는각축의연장선상에선회중심이있어야하는데그러기위해서는좌우앞바퀴축의연장선과뒷바퀴축의연장선이한점에서교차하도록조향각을결정할필요가있다. 이런관계를나타내는이론적인식이아커먼-장토식이다. 이런 아커먼-장토법 을이용하여필요한스티어링축의길이를도출하기로하였다.
/(200)); plot(x,aa,'r'); x1=((350-(100.*sin(aa-23.58)+100.*sin(aa+31.14))).^2+((100.*sin(aa-23.58)-100.*sin (aa+31.14))).^2).^0.5; hold on plot(x1,aa); 그림 25.")
18 위그림을이용하여 sin 와같은식을세울수있었고해당식은 와 의 2 개의미지수를가지는연립방정식이다. 해당방정식을 Numerical 하게계산하기 위하여 MATLAB 프로그램을이용하였다. 코딩내용은다음과같고해당코딩으로 plot하여결과를도출해보았다. x=50:0.1:350; aa=asin((350-x)/(200)); plot(x,aa,'r'); x1=((350-(100.*sin(aa-23.58)+100.*sin(aa+31.14))).^2+((100.*sin(aa-23.58)-100.*sin (aa+31.14))).^2).^0.5; hold on plot(x1,aa); 그림 25. Matlab 계산과정 해당코딩에서 X 는길이 Y 는 의값 (radian) 을나타내므로, 바퀴에서튀어나올부분을 100mm 라고한다면그각도는 로하고, 두부분을연결할부분의길이는 242.8mm 로하면된다. 그렇게되면회전반경이 1375mm 인조향을만들수있다. 축간거


19 리가 2.4m 인실제차가회전반경이약 6m 인점을고려하여보면축간거리가 550mm 인 S Rover 차량에비례적용이가능하다는것을알수있다. 실제기체에적용된모습은다음과같다. 그림 26. 아커만 - 장토법 을 적용한부분 - 조향장치 ( 서보와의연결 ) 아커먼- 장토를이용하여구한조향장치구조를서보와연결하는부분을설계하기위한고려사항으로는양쪽방향으로의조향속도가같아야한다는점이다. 기본적인연결구조물은다음과같은 4절링크기구를사용하기로결정하였다. 그림 27. 조향을위한서보와링크기구 서보가중립위치에서양쪽으로회전할때최종적인바퀴의회전속도가양쪽모두같아야 하므로이를위하여다음과같이인벤터를통하여적절한링크기구의각링크길이를산출 하였다.


20 그림 28. 링크기구인벤터설계 최종적인링크기구의기체적용사진은다음과같다. 아래사진은좌, 우로조향시모습을 비교한것이다. 그림 29. 조향부분의좌, 우방향변화


21 - 현가장치 그림 30. 주행모드에서상태 그림 31. 비행모드에서의상태 현가장치를장착하는데있어서실제로고급차량에적용되는능동형서스펜션장치를장착하는것이이상적이다. 능동형서스펜션은스프링과오일댐퍼가혼합된형태를취하고있으며오일댐퍼내의오리피스의크기가조정되면서 1차적으로스프링이충격을완충하고최종적으로오일댐퍼가총체적인완충량을조정하는형태이다. 오일댐퍼내의오리피스가확장되면압축범위가늘어나서완충량이커지지만오리피스가완전히막히면완충이되지않게된다. 이런능동형서스펜션이필요한이유는비행모드전환시완충작용이일어나게되면비행의불안정성이발생할수있기때문이다. 그림 32. 비행모드이런현가장치를구성하려고하였지만 R/C부품을기본으로하는데는한계가있고능동형서스펜션자체가고급차량에적용되는기술이라 Flying Car에적용하는데한계가있었다. 예상되는능동형댐퍼의장착위치는다음과같다. 리니어엑츄에이터와바퀴내부허브를연결하는사이에연결하여주행변신모드에댐퍼의오리피스크기를줄이도록회로를구성한다.

22 그림 33. 모드변경에따른오리피스크기변화 한편, 비행모드에서의능동형서스펜션의필요성은다음과같다. 비행모드에서적은양의현가성능을낼수있도록오리피스를개방하면로터자체의진동을저감시키는장치로서사용될수있다. 이는기체의안정성을증대시킬것이다. 결과적으로 S Rover에서는비행안정성을위해서현가장치를배제하고구성하였다. 하지만직접제작한차량의특성상공차가존재하고이런공차가약간의완충효과를낼수있다고예상한다. - 제동장치 S Rover 차량의경우주행부의전원소스가전동 R/C와같은방식을사용한다. 때문에현재모형상태에서는별다른제동장치없이역전압을걸어서제동을하는일반적인 RC용전후진용전자변속기를이용하여제동장치를구성한다. 전자변속기에대한내용은동력장치부분에명시하였다. 실제스케일로제작시에는허브리스휠에직접제동을걸어주는브레이크페드를장착할수있다. 이때허브리스바퀴는또다른장점을보여준다. Hubless 휠에장착된브레이크패드는다른일반차량과비교하여외부공기와직접근접하게되므로브레이크패드에서발생되는열을공기로냉각시키는데유리하다. d) 안정성및안전성설계 - Roll Over 안정성 차량의 Roll Over 안정성은크게 2 가지요인에의해서확보되었다. 우선차량의폭과차

23 량길이의비가 1:1과근접할정도로차량의폭이넓다. 또한바퀴가차체에비해크고허브리스디자인으로인해중심이비어있기때문에질량이가벼우면서도회전관성모멘트가크기때문에회전성이좋아차량전체가전진하는관성이커지게된다. 이런관성력이 Roll Over 안정성을높일수있는요인이될것이다. - 외형적충돌안전성휠자체와휠을고정하고있는강재봉들이프롭가드역할을하면서주행중에생길수있는비행동력코어부를안정적으로보호하고있다. 또한주행동력부분도차량전체를볼때상단부위에위치해있기때문에충돌시에파손될염려도적은편이다. 또한모든코어파트를배치할때차체중심에배치를하였기때문에심각한충돌이아니고서는충돌로인한파손이일어날확률이적다. - 탑승자보호안전성등실제차량에서도탑승자를보호하기위에많은안정장치들이배치되어있다. 만약 S Rover차량이현실화된다면최대한실제차량의구조를보전하려고노력을하였기때문에현재차량에서이용중인거의모든안전장치를사용할수있다. 또한설계를진행하면서회전하는부위에대한안전한프롭가드를배치하여혹여발생할수있는위험요소를방지하였다. (3) 모드변환설계 a) 모드변환장치의창의성및현실성 - 모드변환장치 그림 34. 주행과비행모드시리니어엑츄에이터의변화


24 그림 35. 자동랜딩기어 주행모드에서비행모드까지의변환을간단하게하기위해일반 R/C 서보를이용하지않고길이가늘어나는 Linear actuator를이용하여변환모드를설계하였다. 휠이주행모드에서비행모드까지변환되는데 90 도의위상차이를가지고이런위상변화를위해서휠의한점과바디의한점을두고그사이에길이변경이가능한 Linear actuator를설치하였다. 모드변환에필요한랜딩역시같은 Linear actuator를설치하여차체전체를들어올리는방식이다. Linear actuator를구동하기위한회로는다음에나타나있다. - 엑츄에이터구동을위한회로 그림 36. 리니어액츄에이터구동을위한칩셋회로 엑츄에이터를위한구동회로는위와같이주행모드에서남는잉여채널을서보와연결하 여 Limit switch 를연결한회로를사용한다. 서보가왼쪽, 중립, 오른쪽으로움직이면각각

25 두개의 Limit switch가눌림에따라리미트스위치의진행방향을바꾸어준다. 이회로는랜딩, 바퀴상향조정에모두쓰이게된다. 이회로를장착하기위한채널은주행모드에서할당되며각각 3,4Ch에연결된다. 자세한채널의할당은다음에나타나있다. - 각각의모드에사용되는채널의분배 그림 37. 채널분배다음과같이각각의모드에대한수신기의채널분배는다음과같다. 두모드의전환을위해채널5에수신기에들어가는점퍼케이블을변환하는회로를연결하여자동모드변환을가능하게한다. 이회로에대한설명은다음항목에명시되어있다. 주행모드에서비행을위한랜딩기어, 프롭가드상향조정을끝낸뒤 5ch을이용하여비행모드로전환하게된다. - 모드변환을위한수신기변환장치비행모드와주행모드의변환에서가장중요한것은 1~4Ch에연결되는선들을각모드에따라변환하는장치를구현하는것이다. 우리는마이크로프로세서를이용한복잡한전자회로를구현하지않고, 서보와리미트스위치를이용한간단하지만정확한변환장치를다음과같이구성하였다. 펄스신호를보내주는 s 선은각각의채널에합쳐서수신기와연결한뒤같은 5v전압을쓰는선을모드별로묶어모드변환회로를통과하게한다. 서보혼의위치에따라리미트스위치가눌리며수신기에각모드에다라전원을달리넣어모드를변환할수있는회로이다.
")

26 그림 38. 모드변환을위한보드 b) 모드변환장치의효율성 - Linear Actuator 그림 39. Linear actuator 의스펙과성능표

27 무게는개당 84g의무게를가지고있고 6개의 Linear actuator가모드변환장치에사용되었으므로모드변환과랜딩을포함총 504g의무게 를가진다. 리니어엑츄에이터의내부구조는작은모터에높은기어비를구성하여웜기어를이용하여회전구동을직선구동으로변환하는것이다. 그림 40. 웜기어 이러한리니어엑츄에이터를사용한 S Rover 차량의모드변환장치는서보와기구학적링크를사용하는방식에비해정확한동작을할수있게해준다. 또한 150:1이라는기어비는바퀴의무게가비교적무서운 S-rover의각바퀴를비행모드를위해 90도올려줄수있을정도로상당한힘을보여준다. 다소속도가느린점이있지만실제스케일로증가할때유압장치를사용하는경우라면속도의문제또한해결될수있을것이라판단된다. - 모드변환회로 S-Rover의모든모드변환회로는모두서보와리미트스위치를이용하여제작되었다. 릴레이를이용하고, 마이컴을이용한회로를구성하고싶었지만관련지식을가진구성원이없었기에이렇게구현을하게되었다. 그러나별다른고민없이적은시간을들여제작할수있었고, 성능이확실했기때문에기체에최종적으로장착하게되었다. 3. 평가 (1) 지상시험 - 추력시험모터하나당의기본추력을테스트하기위해서추력테스트기를만들어서직접실험을하였다. Flycam 1000 모터하나당약 1.5kg의추력을발생시킬수있었고이런모터를 8개 X8형태로장착한 S Rover 차량은 6kg의차량을충분히호버링시킬정도의추력을발생시킬수있었다. - 구조시험 우리의차체프레임이비행시에받는비틀림을분석해본결과프레임상단에각관 1 개로 이루어진부분에비틀림이크게가해지고, 또한프레임에서대각선방향의힘을지지해줄
28 지지대가없어서대각방향의모멘트에약한부분이존재했다. 이런부분을해결하기위해 서바디경량화작업을실시하면서그구조를변경하여가볍고보든방향에서의비틀림과 모멘트에강하도록프레임을새로제작중에있다. - 부분품동작시험기본적으로모든부분동작은이상이없는상태이다. 모드변환을위하여리미트스위치와비행용서보를이용하여가벼운기계적제어보드를제작하였고랜딩을한후바퀴를들어올리는순차적작업을성공적으로수행하였다. 변속기의문제로인한반응속도의문제를제외하고비행구동부에도이상은없었다. 또한주행부분은속도측면에서좀느린부분이있어서기어박스의기어비를제어하면서대회시점까지최적의조합을찾아나갈계획이다. (2) 주행분석 a) 직진주행 - 직선주행안정성 S-Rover의주행동력은뒷바퀴의 2개의모터에서나온다. 따라서차량의직진성을높이기위해서는 2개의모터의속도를일정하게제어하는것이중요하다. 따라서 S-Rover는한개의수신기에서 Y자형태로선은뽑아동일한변속기 2개에연결함으로같은속도로출력이나오도록하였고적절한직진성능을보여주었다. 또한고토크의서보모터로조향을하여도로상의각종변수에의해조향각도가변하여직진성능을잃지않도록하였다. - 도로거칠기에따른안정성 S-Rover 는차량에비해큰바퀴를가지고있기때문에도로에있는각종장애물에큰 영향을받지않고직진성을유지할수있다. b) 제동성능 - 타이어성능 S-Rover의바퀴는합판으로이루어진거대한원형링의형태를이루고있다. 기존의양산되는 RC제품을쓴것이아니기때문에타이어의재질과형태를결정하는데어려움이있었으나, 최종적으로스펀지와미끄럼방지테이프를사용하기로하였다. 실제대부분의 RC의바퀴는휠, 이너스펀지, 그리고타이어의조합으로이루어져있다. 따라서 S-Rover의바퀴는구조상상용화된 RC차량과비슷한타이어의형태를이룰수있었고이는곧적절한성능으로보여졌다. - 속도에따른제동거리비교스로틀을 33% 정도올렸을시제동거리는대략 10~15cm 가량이나왔고, 66% 정도에서는 25cm 가량의제동거리가나왔다. 풀스로틀상태에서제동시에는대략 40cm정도의제동거리가나왔다. 차량의제동거리는속력의제곱에비례하나 S-Rover는구조상빠른속력을가지지는못하였기에제동거리에큰영향을주지못하는모습을보였다.
29 c) 코너주행 - 최소회전반경인벤터를이용하여아커만장토를설계했을때최소회전반경은대략 1112mm로측정되었고실제주행을했을시 1m 30cm ~ 1m 40cm 정도의최소회전반경을보였다. - 코너주행성능우선 S-Rover는위에서설명하였듯이아커만-장토법을사용하고있다. 따라서조향시양앞바퀴의각도를자연스럽게다르게할수있었고이는미끄러짐없이부드러운코너링을만드는데큰역할을하였다. 코너주행을부드럽게하기위해서는코너에서양쪽의바퀴들의속도를달리해주는차동장치가필수이다. 하지만 S-Rover는구조상기계적차동장치가없고 2개의모터를하나의수신기로제어하기때문에두모터가같은속력만을낼수있다. 따라서현재더나은코너링을위하여전자적차동이가능한제어보드를찾고있으며, 기존의사용하던보드의프로그램을변경하는것도연구중에있다. d) 경사주행 - 경사각에따른주행성능비교현재 S-Rover는상용화된기어박스를쓰고있다. 따라서최소 1:4에서부터최대 1:400까지기어비의변환이가능하다. 또한바퀴와풀리에서 1:10의기어비가발생한다. 따라서기어비를조정하며실험한결과 1:16의기어박스를사용하여총 1:160의기어비를만들었을때가장적합한주행성능을보였고, 충분한고토크의동력이만들어졌기때문에 20 의경사도무리없이올라갈수있었다. 또한미끄럼방지테이프를이용하였기때문에미끄러짐도크게발생하지않았다. - 경사정지 실험은아크릴판위에서실행되었고최대 25 가량의경사에도미끄러짐없이서있는모습 을볼수있었다. (3) 비행분석 - 호버링성능 6kg에달하는차체를호버링시키기위해서 X8 형태의멀티콥터의형태의비행체를가지도록했다. 4셀 14.8V 25C의방전률을가지는 5000mah 배터리 2개를배치하여실험을해보았을때, 60% 정도의스로틀을올렸을때호버링이가능했다. 보통 40~50% 정도의스로틀을올렸을때비행이가능한형태가가능한것을생각하면성능이뛰어난편은아니지만호버링이가능한정도의성능이다. 현재최종적으로차체의무게를경량화하는작업을실시중이므로대회용최종모델의경우는호버링성능이더욱개선될수있을것이라고생각한다.
30 - 정지비행안정성정지비행한상태에서비행의안정성을실험하였을때, 주행부가달린뒷바퀴쪽에상대적으로많은장치가달려안정적인모습을보이지못하였다. 따라서현재중량이많이나가는배터리를이용하여이부분은무게중심의균형을맞춤으로해결하고있다. 임시적으로테스트를할때마다무게중심을새로맞춰주고있지만, 경량화작업이끝나게되면정확한무게중심을맞추어무게중심을고정시킬계획이다. - 자세제어성능작년우승팀인아름다운비행을방문하여조언을구하면서자세제어성능테스트를실시하였다. 사람의인력으로인공적인호버링상황을만들고자세제어성능테스트를실시하였는데무게중심의미세한차이로인해전방으로전진하는자세제어가불안한면이있었고, 바디의미세한흔들림으로인해제어에문제가생긴측면또한존재하였다. 이런부분은바디경량화를위해바디를새로제작하면서기존에존재하지않는대각선방향의비틀림을방지할구조물을배치하여해결할것이다. 또저가의변속기가좋은반응속도를보여주지못하여서자세제어가어려운부분이있었다. 따라서좀더고가의좋은성능의변속기를구매하였고, 적절한반응속도와출력을얻을수있었다.
- 1 - 제 5 회국제신비차경연대회최종보고서
 - 1 - 제 5 회국제신비차경연대회최종보고서 2014. 9. 15. - 2 - A. 학술부문 1. 설계개념및형상설계 (1) 설계목표주어지임무를완수하기위해저희팀에서는수직이착륙이가능한 VTOL형신비차를제작을목표로합니다. 주행과비행미션을효율적으로수행하기위하여신비차의경량화와에너지효율을높이는쪽으로설계 / 제작할계획입니다. 시스템경량화신비차의경량화를위하여경량의 ABS
- 1 - 제 5 회국제신비차경연대회최종보고서 2014. 9. 15. - 2 - A. 학술부문 1. 설계개념및형상설계 (1) 설계목표주어지임무를완수하기위해저희팀에서는수직이착륙이가능한 VTOL형신비차를제작을목표로합니다. 주행과비행미션을효율적으로수행하기위하여신비차의경량화와에너지효율을높이는쪽으로설계 / 제작할계획입니다. 시스템경량화신비차의경량화를위하여경량의 ABS
제 회경상남도지사배국제신비차 경연대회최종보고서 프렌즈 소속일반팀 지도교수 인 팀장서영준 인 외 명
 제 회경상남도지사배국제신비차 경연대회최종보고서 프렌즈 소속일반팀 지도교수 인 팀장서영준 인 외 명 목차 1. 설개개념 ------------------------------------ 1 (1) 임무분석 --------------------------------- 1 (2) 설계목표 --------------------------------- 2 (3) 디자인의미
제 회경상남도지사배국제신비차 경연대회최종보고서 프렌즈 소속일반팀 지도교수 인 팀장서영준 인 외 명 목차 1. 설개개념 ------------------------------------ 1 (1) 임무분석 --------------------------------- 1 (2) 설계목표 --------------------------------- 2 (3) 디자인의미
4-Ç×°ø¿ìÁÖÀ̾߱â¨ç(30-39)
") 항공우주 이야기 항공기에 숨어 있는 과학 및 비밀장치 항공기에는 비행 중에 발생하는 현상을 효율적으로 이용하기 위해 과 학이 스며들어 있다. 특별히 관심을 갖고 관찰하지 않으면 쉽게 발견할 수 없지만, 유심히 살펴보면 객실 창문에 아주 작은 구멍이 있고, 주 날 개를 보면 뒷전(trailing edge) 부분이 꺾어져 있다. 또 비행기 전체 형 상을 보면 수직꼬리날개가
항공우주 이야기 항공기에 숨어 있는 과학 및 비밀장치 항공기에는 비행 중에 발생하는 현상을 효율적으로 이용하기 위해 과 학이 스며들어 있다. 특별히 관심을 갖고 관찰하지 않으면 쉽게 발견할 수 없지만, 유심히 살펴보면 객실 창문에 아주 작은 구멍이 있고, 주 날 개를 보면 뒷전(trailing edge) 부분이 꺾어져 있다. 또 비행기 전체 형 상을 보면 수직꼬리날개가
PERFORMANCE technology the all-new bmw 5 series. dynamic 06 business 14 comfort 20 safety 22 model LineuP 24 TecHnicaL data 26 bmw service 28 bmw kore
 sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
6_5상 스테핑 모터_ _OK.indd
 모델구성 적용모델 : 표준축형,, A 8K M 5 6 6 B Autonics motor 1: 은편축형만제공합니다. 2: Standard 결선방식은주문사양입니다. ( 단, 24각, A4K-G564(W), A8K-G566(W) 은제외입니다.) 모델구성 Q-42 모터형식 적용모델 : 기어드일체형,, 로터리액츄에이터형, 로터리액츄에이터 + A M 5 최대허용토크 모터상수
모델구성 적용모델 : 표준축형,, A 8K M 5 6 6 B Autonics motor 1: 은편축형만제공합니다. 2: Standard 결선방식은주문사양입니다. ( 단, 24각, A4K-G564(W), A8K-G566(W) 은제외입니다.) 모델구성 Q-42 모터형식 적용모델 : 기어드일체형,, 로터리액츄에이터형, 로터리액츄에이터 + A M 5 최대허용토크 모터상수
SM710월가격표9.30
 SE / SE PLEASURE / LE/ RE / PRESTIGE / RE35 2009년 10월 기준 SM7 가격표 SE SE PLEASURE LE RE PRESTIGE RE35 SM7 PERFECT CARE SERVICE Line-up Neo VQ23 SE 대형 승용차의 품위를 가장 합리적으로 즐기십시오. SE PLEASURE NEW LE 매력적인 스타일에
SE / SE PLEASURE / LE/ RE / PRESTIGE / RE35 2009년 10월 기준 SM7 가격표 SE SE PLEASURE LE RE PRESTIGE RE35 SM7 PERFECT CARE SERVICE Line-up Neo VQ23 SE 대형 승용차의 품위를 가장 합리적으로 즐기십시오. SE PLEASURE NEW LE 매력적인 스타일에
이 장에서 사용되는 MATLAB 명령어들은 비교적 복잡하므로 MATLAB 창에서 명령어를 직접 입력하지 않고 확장자가 m 인 text 파일을 작성하여 실행을 한다
 이장에서사용되는 MATLAB 명령어들은비교적복잡하므로 MATLAB 창에서명령어를직접입력하지않고확장자가 m 인 text 파일을작성하여실행을한다. 즉, test.m 과같은 text 파일을만들어서 MATLAB 프로그램을작성한후실행을한다. 이와같이하면길고복잡한 MATLAB 프로그램을작성하여실행할수있고, 오류가발생하거나수정이필요한경우손쉽게수정하여실행할수있는장점이있으며,
이장에서사용되는 MATLAB 명령어들은비교적복잡하므로 MATLAB 창에서명령어를직접입력하지않고확장자가 m 인 text 파일을작성하여실행을한다. 즉, test.m 과같은 text 파일을만들어서 MATLAB 프로그램을작성한후실행을한다. 이와같이하면길고복잡한 MATLAB 프로그램을작성하여실행할수있고, 오류가발생하거나수정이필요한경우손쉽게수정하여실행할수있는장점이있으며,
サーボモータ用高精度減速機_AFC_Aシリーズ
 Accurate Reducer High-Precision Gear for Servo-motors CONTENTS P. 2 P. A1 P. B1 P. T1 P. T23 1 유성감속기 APG type 100W-3000W 3arcmin 1arcmin 형번12 형번1 형번2 형번22 기종구성 용량 정밀도 3 10 100W 20 형번12 2 3분 1분 형번22 9
Accurate Reducer High-Precision Gear for Servo-motors CONTENTS P. 2 P. A1 P. B1 P. T1 P. T23 1 유성감속기 APG type 100W-3000W 3arcmin 1arcmin 형번12 형번1 형번2 형번22 기종구성 용량 정밀도 3 10 100W 20 형번12 2 3분 1분 형번22 9
ePapyrus PDF Document
 S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications 260 190 46 (W ) 1024 x 768 (4:3) 400 cd 4선압력방식 1.5Kg 245 x 184 (1T~5T 가능 ) Intel eleron J1900 Quard ore 2z Intel VL887 O, O 250 ~ 1T, 40 ~ SS 옵션가능
S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications 260 190 46 (W ) 1024 x 768 (4:3) 400 cd 4선압력방식 1.5Kg 245 x 184 (1T~5T 가능 ) Intel eleron J1900 Quard ore 2z Intel VL887 O, O 250 ~ 1T, 40 ~ SS 옵션가능
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
슬라이드 1
 한국산업기술대학교 제 5 강스케일링및회전 이대현교수 학습안내 학습목표 3D 오브젝트의확대, 축소및회전방법을이해한다. 학습내용 3D 오브젝트의확대및축소 (Scaling) 3D 오브젝트의회전 (Rotation) 변홖공갂 (Transform Space) SceneNode 의크기변홖 (Scale) void setscale ( Real x, Real y, Real z)
한국산업기술대학교 제 5 강스케일링및회전 이대현교수 학습안내 학습목표 3D 오브젝트의확대, 축소및회전방법을이해한다. 학습내용 3D 오브젝트의확대및축소 (Scaling) 3D 오브젝트의회전 (Rotation) 변홖공갂 (Transform Space) SceneNode 의크기변홖 (Scale) void setscale ( Real x, Real y, Real z)
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (
 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (") 제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
< > 1 2 '.... BLDC ESC GPS GPS.,.
 < > 1 2 '.... BLDC ESC....... GPS GPS.,. 1. 개요 연구동기및목적 사회적연구환경 1 1 (Amazon) (Prime Air) (Drone).. 그림 1. 프라임에어 (PrimeAir) 서비스.,... (Impact Lab) SF (SF Express) 500. SF (Octocopter), 2.7kg. (InCake),....
< > 1 2 '.... BLDC ESC....... GPS GPS.,. 1. 개요 연구동기및목적 사회적연구환경 1 1 (Amazon) (Prime Air) (Drone).. 그림 1. 프라임에어 (PrimeAir) 서비스.,... (Impact Lab) SF (SF Express) 500. SF (Octocopter), 2.7kg. (InCake),....
2_안드로이드UI
 03 Layouts 레이아웃 (Layout) u ViewGroup의파생클래스로서, 포함된 View를정렬하는기능 u 종류 LinearLayout 컨테이너에포함된뷰들을수평또는수직으로일렬배치하는레이아웃 RelativeLayout 뷰를서로간의위치관계나컨테이너와의위치관계를지정하여배치하는레이아웃 TableLayout 표형식으로차일드를배치하는레이아웃 FrameLayout
03 Layouts 레이아웃 (Layout) u ViewGroup의파생클래스로서, 포함된 View를정렬하는기능 u 종류 LinearLayout 컨테이너에포함된뷰들을수평또는수직으로일렬배치하는레이아웃 RelativeLayout 뷰를서로간의위치관계나컨테이너와의위치관계를지정하여배치하는레이아웃 TableLayout 표형식으로차일드를배치하는레이아웃 FrameLayout
No Slide Title
 저속 고토크 유압 모터 JS,JH, 시리즈 2K / J2K, 6k / J6K 시리즈 2005-1 B137 001-02 June 2000 JH 시리즈 특징 스풀 밸브 및 지로터가 있는 컴팩트한 디자인. 수입 고압 용량 샤프트 씰, 다 양한 범위의 마운팅 플랜지, 샤프트, 포트, 속도가 설계 유연성을 제공합 니다. 샤프트 회전 방향 및 속도는 쉽고 부드럽게 제어할
저속 고토크 유압 모터 JS,JH, 시리즈 2K / J2K, 6k / J6K 시리즈 2005-1 B137 001-02 June 2000 JH 시리즈 특징 스풀 밸브 및 지로터가 있는 컴팩트한 디자인. 수입 고압 용량 샤프트 씰, 다 양한 범위의 마운팅 플랜지, 샤프트, 포트, 속도가 설계 유연성을 제공합 니다. 샤프트 회전 방향 및 속도는 쉽고 부드럽게 제어할
게임 기획서 표준양식 연구보고서
 ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ
ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ ᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞᆞ
LM 가이드
 R/RS 가이드 B 제품치수제원 치수도, 치수표 R-R 형, R-LR 형... RS-R 형, RS-LR 형... R-A 형, R-LA 형... RS-A 형, RS-LA 형... R-B 형, R-LB 형... RS-B 형, RS-LB 형... 레일의표준길이와최대길이... 옵션... LaS 및각종씰부착후 블록치수 (L 치수 ).. LaS 부착후의그리스니플증가치수..
R/RS 가이드 B 제품치수제원 치수도, 치수표 R-R 형, R-LR 형... RS-R 형, RS-LR 형... R-A 형, R-LA 형... RS-A 형, RS-LA 형... R-B 형, R-LB 형... RS-B 형, RS-LB 형... 레일의표준길이와최대길이... 옵션... LaS 및각종씰부착후 블록치수 (L 치수 ).. LaS 부착후의그리스니플증가치수..
LM 가이드
 SR/SS 볼리테이너타입 가이드 B 제품치수제원 치수도, 치수표 SR-R 형, SR-R 형... SS-R 형, SS-R 형... SR- 형, SR- 형... SS- 형, SS- 형... SR-RH 형 ( 수주대응품 ), SR-RH 형 ( 수주대응품 ).. SS-RH 형 ( 수주대응품 ), SS-RH 형 ( 수주대응품 )... SR-H 형 ( 수주대응품 ),
SR/SS 볼리테이너타입 가이드 B 제품치수제원 치수도, 치수표 SR-R 형, SR-R 형... SS-R 형, SS-R 형... SR- 형, SR- 형... SS- 형, SS- 형... SR-RH 형 ( 수주대응품 ), SR-RH 형 ( 수주대응품 ).. SS-RH 형 ( 수주대응품 ), SS-RH 형 ( 수주대응품 )... SR-H 형 ( 수주대응품 ),
- 2 -
 - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
- 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
Microsoft PowerPoint - 부교재_자동차생활_34.파워 윈도우,도어록,와이퍼 사용법 [호환 모드]
![Microsoft PowerPoint - 부교재_자동차생활_34.파워 윈도우,도어록,와이퍼 사용법 [호환 모드]](/thumbs/40/20648484.jpg "Microsoft PowerPoint - 부교재_자동차생활_34.파워 윈도우,도어록,와이퍼 사용법 [호환 모드]") 파워 윈도우, 도어록, 와이퍼 사용법 학습 내용 1. 파워윈도우 2. 파워 도어록 장치 및 도어 개폐 방법 3. 윈도우 와이퍼 학습 목표 1. 파워윈도우, 도어록, 와이퍼 기능을 이해하고 사용할 수 있습니다. 본 콘텐츠의 내용은 통상적인 자동차관리에 대한 정보로서, 절대적인 적용기준이 되지는 않습니다. Copyrights c 현대자동차, 무단 전재 및 재배포
파워 윈도우, 도어록, 와이퍼 사용법 학습 내용 1. 파워윈도우 2. 파워 도어록 장치 및 도어 개폐 방법 3. 윈도우 와이퍼 학습 목표 1. 파워윈도우, 도어록, 와이퍼 기능을 이해하고 사용할 수 있습니다. 본 콘텐츠의 내용은 통상적인 자동차관리에 대한 정보로서, 절대적인 적용기준이 되지는 않습니다. Copyrights c 현대자동차, 무단 전재 및 재배포
완벽한개념정립 _ 행렬의참, 거짓 수학전문가 NAMU 선생 1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에
,, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에") 1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에대하여 AB=BA 1 가성립한다 2 3 (4) 이면 1 곱셈공식및변형공식성립 ± ± ( 복호동순 ), 2 지수법칙성립 (은자연수 ) < 거짓인명제 >
1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에대하여 AB=BA 1 가성립한다 2 3 (4) 이면 1 곱셈공식및변형공식성립 ± ± ( 복호동순 ), 2 지수법칙성립 (은자연수 ) < 거짓인명제 >
2016년 신호등 3월호 내지A.indd
 www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
ePapyrus PDF Document
 S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications ooling System 260 190 46 (W ) 1024 x 768 (4:3) L 400 cd 4선압력방식 1.5Kg ase an(50 50) onector X 2 VS 고정방식, 매립브라켓고정방식 245 x 184 (1T~5T 가능 ) 12V/5 dapter
S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications ooling System 260 190 46 (W ) 1024 x 768 (4:3) L 400 cd 4선압력방식 1.5Kg ase an(50 50) onector X 2 VS 고정방식, 매립브라켓고정방식 245 x 184 (1T~5T 가능 ) 12V/5 dapter
..액추에이터청정화기기모듈러F압력센서10-M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가스켓 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해
 ..액추에이터청정화기기모듈러F압력센서M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해니켈도금처리 튜브재질 폴리우레탄 사용유체 공기, 물주 ) M의경우 ø.1/ø2, ø/ø 적용 M-R ø.1/ø2
..액추에이터청정화기기모듈러F압력센서M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해니켈도금처리 튜브재질 폴리우레탄 사용유체 공기, 물주 ) M의경우 ø.1/ø2, ø/ø 적용 M-R ø.1/ø2
실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
슬라이드 1
 핚국산업기술대학교 제 9 강캐릭터컨트롤러 이대현교수 학습안내 학습목표 씬노드의구성및회전방법을응용하여, 구면카메라및캐릭터컨트롤을구현해본다. 학습내용 구면카메라구현을위한씬노드구성및회전캐릭터컨트롤을위한씬노구구성및회전 카메라및캐릭터컨트롤구현목표 카메라컨트롤 WOW의카메라컨트롤 ( 구면카메라 ) 마우스를이용한좌우패닝, 상하피칭. 휠스크롤을이용한줌인및줌아웃. 캐릭터를중심으로회전됨.
핚국산업기술대학교 제 9 강캐릭터컨트롤러 이대현교수 학습안내 학습목표 씬노드의구성및회전방법을응용하여, 구면카메라및캐릭터컨트롤을구현해본다. 학습내용 구면카메라구현을위한씬노드구성및회전캐릭터컨트롤을위한씬노구구성및회전 카메라및캐릭터컨트롤구현목표 카메라컨트롤 WOW의카메라컨트롤 ( 구면카메라 ) 마우스를이용한좌우패닝, 상하피칭. 휠스크롤을이용한줌인및줌아웃. 캐릭터를중심으로회전됨.
LM 가이드
 RSR 가이드 제품치수제원 치수도, 치수표 RSR- 형, RSR- 형, RSR-T 형... RSR- 형, RSR-K 형, RSR-V 형, RSR- 형.. RSR-(T) 형, RSR-(T) 형.. RSR-V 형, RSR-V 형, RSR- 형... 레일의표준길이와최대길이... 스톱퍼... 옵션... as 및각종씰부착후 블록치수 ( 치수 ).. 캡... QZ 부착후의
RSR 가이드 제품치수제원 치수도, 치수표 RSR- 형, RSR- 형, RSR-T 형... RSR- 형, RSR-K 형, RSR-V 형, RSR- 형.. RSR-(T) 형, RSR-(T) 형.. RSR-V 형, RSR-V 형, RSR- 형... 레일의표준길이와최대길이... 스톱퍼... 옵션... as 및각종씰부착후 블록치수 ( 치수 ).. 캡... QZ 부착후의
Microsoft Word - PLC제어응용-2차시.doc
 과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
제 4 회국제신비차경연대회최종보고서 KU Neo Flying Car 소속건국대학교 지도교수박정근 ( 인 ) 팀장류창명 ( 인 ) 외 3 명
 팀장류창명 ( 인 ) 외 3 명") 제 4 회국제신비차경연대회최종보고서 2013. 10. 14. KU Neo Flying Car 소속건국대학교 지도교수박정근 ( 인 ) 팀장류창명 ( 인 ) 외 3 명 Contents < 제목차례 > A. 학술부문 1 1. 설계개념및형상설계 1 (1) 설계목표 1 (2) 디자인의미 1 (3) 외형설계 2 2. 성능및안정성 / 조종성해석 3 (1) 공력및추력특성
제 4 회국제신비차경연대회최종보고서 2013. 10. 14. KU Neo Flying Car 소속건국대학교 지도교수박정근 ( 인 ) 팀장류창명 ( 인 ) 외 3 명 Contents < 제목차례 > A. 학술부문 1 1. 설계개념및형상설계 1 (1) 설계목표 1 (2) 디자인의미 1 (3) 외형설계 2 2. 성능및안정성 / 조종성해석 3 (1) 공력및추력특성
<BFACBDC0B9AEC1A6C7AEC0CC5F F E687770>
 IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
- 1 -
 [ 붙임 3] 작품설명서표지 작품번호 1145 편경은왜기역자인가? - 기역자형태에따른기본진동수및고유진동수변화분석 - 출품분야학생부출품부문물리 2013. 7. 8. 구분성명 출품학생 지도교사 강민석 이승목 정혁 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - cos cosh sinh cos sin - 10 - 는반지름
[ 붙임 3] 작품설명서표지 작품번호 1145 편경은왜기역자인가? - 기역자형태에따른기본진동수및고유진동수변화분석 - 출품분야학생부출품부문물리 2013. 7. 8. 구분성명 출품학생 지도교사 강민석 이승목 정혁 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - cos cosh sinh cos sin - 10 - 는반지름
온습도 판넬미터(JTH-05) 사양서V1.0
 사양서V1.0") 온습도 조절기 Model:JTH-05 1. 제품 사양. [제품 구분] JTH-05A(입력 전원 AC), JTH-05D(입력 전원 DC) [전원 사양] JTH-05A 입력 전압 출력 전원 소비 전력 JTH-05D AC 90~240V DC 10~36V 12Vdc / Max.170mA Max.2W [본체 사이즈] ~ 온/습도 범위(본체): 사용 [0 ~ 50, 85%RH
온습도 조절기 Model:JTH-05 1. 제품 사양. [제품 구분] JTH-05A(입력 전원 AC), JTH-05D(입력 전원 DC) [전원 사양] JTH-05A 입력 전압 출력 전원 소비 전력 JTH-05D AC 90~240V DC 10~36V 12Vdc / Max.170mA Max.2W [본체 사이즈] ~ 온/습도 범위(본체): 사용 [0 ~ 50, 85%RH
View Licenses and Services (customer)
") 빠른 빠른 시작: 시작: 라이선스, 라이선스, 서비스 서비스 및 주문 주문 이력 이력 보기 보기 고객 가이드 Microsoft 비즈니스 센터의 라이선스, 서비스 및 혜택 섹션을 통해 라이선스, 온라인 서비스, 구매 기록 (주문 기록)을 볼 수 있습니다. 시작하려면, 비즈니스 센터에 로그인하여 상단 메뉴에서 재고를 선택한 후 내 재고 관리를 선택하십시오. 목차
빠른 빠른 시작: 시작: 라이선스, 라이선스, 서비스 서비스 및 주문 주문 이력 이력 보기 보기 고객 가이드 Microsoft 비즈니스 센터의 라이선스, 서비스 및 혜택 섹션을 통해 라이선스, 온라인 서비스, 구매 기록 (주문 기록)을 볼 수 있습니다. 시작하려면, 비즈니스 센터에 로그인하여 상단 메뉴에서 재고를 선택한 후 내 재고 관리를 선택하십시오. 목차
쓰리 핸드(삼침) 요일 및 2405 요일 시간, 및 요일 설정 1. 용두를 2의 위치로 당기고 반시계방향으로 돌려 전날로 를 설정합니다. 2. 용두를 시계방향으로 돌려 전날로 요일을 설정합니다. 3. 용두를 3의 위치로 당기고 오늘 와 요일이 표시될 때까지 시계방향으로
 요일 및 2405 요일 시간, 및 요일 설정 1. 용두를 2의 위치로 당기고 반시계방향으로 돌려 전날로 를 설정합니다. 2. 용두를 시계방향으로 돌려 전날로 요일을 설정합니다. 3. 용두를 3의 위치로 당기고 오늘 와 요일이 표시될 때까지 시계방향으로") 한국어 표준 설정안내 서브 초침 시간 및 설정 1. 용두를 2의 위치로 뽑아냅니다. 2. 용두를 시계방향 또는 반시계방향으로 돌려(모델에 따라 다름) 를 전날로 설정합니다. 3. 용두를 3의 위치로 당기고 현재 가 표시될 때까지 시계방향으로 돌립니다. 4. 용두를 계속 돌려 정확한 오전/오후 시간을 설정합니다. 5. 용두를 1의 위치로 되돌립니다. 169 쓰리
한국어 표준 설정안내 서브 초침 시간 및 설정 1. 용두를 2의 위치로 뽑아냅니다. 2. 용두를 시계방향 또는 반시계방향으로 돌려(모델에 따라 다름) 를 전날로 설정합니다. 3. 용두를 3의 위치로 당기고 현재 가 표시될 때까지 시계방향으로 돌립니다. 4. 용두를 계속 돌려 정확한 오전/오후 시간을 설정합니다. 5. 용두를 1의 위치로 되돌립니다. 169 쓰리
Microsoft Word - 5장_보&골조.doc
 5. 보와골조 : 전단력과휨모멘트 (Beams and Frames: Shear forces and bending moments) 수업목적 : 평면상에서하중을받는보와골조에발생하는내력과모 멘트계산에필요한해석기법을이해하고습득. 수업내용 : 전단력도와모멘트도 하중, 전단력, 휨모멘트사이의관계 정성적처짐형상 평면골조의정적정정, 부정정, 불안정 평면골조의해석 Lecture
5. 보와골조 : 전단력과휨모멘트 (Beams and Frames: Shear forces and bending moments) 수업목적 : 평면상에서하중을받는보와골조에발생하는내력과모 멘트계산에필요한해석기법을이해하고습득. 수업내용 : 전단력도와모멘트도 하중, 전단력, 휨모멘트사이의관계 정성적처짐형상 평면골조의정적정정, 부정정, 불안정 평면골조의해석 Lecture
 안전확인안전기준 이륜자전거 제 1 부일반용자전거 1. 적용범위 비고 1 2. 관련표준 3. 정의 3.1 일반용자전거 3.2 세이프티훅 3.3 서스펜션훅 3.4 숄더패드 3.5 클리프리스페달 3.6 반사성타이어 3.7 고리모양반사장치 4. 종류및프레임형태 4.1 종류 표 표자전거의종류 비고 4.2 프레임의형태 5. 안전요구사항 5.1 일반 5.1.1 선예부 5.1.2
안전확인안전기준 이륜자전거 제 1 부일반용자전거 1. 적용범위 비고 1 2. 관련표준 3. 정의 3.1 일반용자전거 3.2 세이프티훅 3.3 서스펜션훅 3.4 숄더패드 3.5 클리프리스페달 3.6 반사성타이어 3.7 고리모양반사장치 4. 종류및프레임형태 4.1 종류 표 표자전거의종류 비고 4.2 프레임의형태 5. 안전요구사항 5.1 일반 5.1.1 선예부 5.1.2
<3235B0AD20BCF6BFADC0C720B1D8C7D120C2FC20B0C5C1FE20322E687770>
 25 강. 수열의극한참거짓 2 두수열 { }, {b n } 의극한에대한 < 보기 > 의설명중옳은것을모두고르면? Ⅰ. < b n 이고 lim = 이면 lim b n =이다. Ⅱ. 두수열 { }, {b n } 이수렴할때 < b n 이면 lim < lim b n 이다. Ⅲ. lim b n =0이면 lim =0또는 lim b n =0이다. Ⅰ 2Ⅱ 3Ⅲ 4Ⅰ,Ⅱ 5Ⅰ,Ⅲ
25 강. 수열의극한참거짓 2 두수열 { }, {b n } 의극한에대한 < 보기 > 의설명중옳은것을모두고르면? Ⅰ. < b n 이고 lim = 이면 lim b n =이다. Ⅱ. 두수열 { }, {b n } 이수렴할때 < b n 이면 lim < lim b n 이다. Ⅲ. lim b n =0이면 lim =0또는 lim b n =0이다. Ⅰ 2Ⅱ 3Ⅲ 4Ⅰ,Ⅱ 5Ⅰ,Ⅲ
Microsoft PowerPoint 상 교류 회로
 3상교류회로 11.1. 3 상교류의발생 평등자계중에놓인회전자철심에기계적으로 120 씩차이가나게감은코일 aa, bb,cc 를배치하고각속도의속도로회전하면각코일의양단에는다음식으로표현되는기전력이발생하게된다. 11.1. 3 상교류의발생 여기서 e a, e b, e c 는각각코일aa, bb, cc 양단에서얻어지는전압의순시치식이며, 각각을상 (phase) 이라한다. 이와같이전압의크기는같고위상이
3상교류회로 11.1. 3 상교류의발생 평등자계중에놓인회전자철심에기계적으로 120 씩차이가나게감은코일 aa, bb,cc 를배치하고각속도의속도로회전하면각코일의양단에는다음식으로표현되는기전력이발생하게된다. 11.1. 3 상교류의발생 여기서 e a, e b, e c 는각각코일aa, bb, cc 양단에서얻어지는전압의순시치식이며, 각각을상 (phase) 이라한다. 이와같이전압의크기는같고위상이
KMC.xlsm
 제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
96 경첩들어올림 347 타입 A Ø 타입 B Ø 신속하고쉬운도어탈착 모든금속구조재질및마감처리강철, 아연도금또는스테인리스스틸
 96 경첩들어올림 347 6.35.1 Ø 6.35 31.7 25.4.1 6.35 25.4.1 6.35.1 Ø 6.35 6.35 31.7 모든금속구조강철, 아연도금또는스테인리스스틸 63.5 50.8 50.8 50.8 63.5 50.8 Ø 3.2 Ø 3.2 25.4 20.8 20.8 25.4 1.27 1.27 1.27 1.27 50.8 4 x Ø 3.2±0.1
96 경첩들어올림 347 6.35.1 Ø 6.35 31.7 25.4.1 6.35 25.4.1 6.35.1 Ø 6.35 6.35 31.7 모든금속구조강철, 아연도금또는스테인리스스틸 63.5 50.8 50.8 50.8 63.5 50.8 Ø 3.2 Ø 3.2 25.4 20.8 20.8 25.4 1.27 1.27 1.27 1.27 50.8 4 x Ø 3.2±0.1
<B4EBC7D0BCF6C7D02DBBEFB0A2C7D4BCF62E687770>
 삼각함수. 삼각함수의덧셈정리 삼각함수의덧셈정리 삼각함수 sin (α + β ), cos (α + β ), tan (α + β ) 등을 α 또는 β 의삼각함수로나 타낼수있다. 각 α 와각 β 에대하여 α >0, β >0이고 0 α - β < β 를만족한다고가정하 자. 다른경우에도같은방법으로증명할수있다. 각 α 와각 β 에대하여 θ = α - β 라고놓자. 위의그림에서원점에서거리가
삼각함수. 삼각함수의덧셈정리 삼각함수의덧셈정리 삼각함수 sin (α + β ), cos (α + β ), tan (α + β ) 등을 α 또는 β 의삼각함수로나 타낼수있다. 각 α 와각 β 에대하여 α >0, β >0이고 0 α - β < β 를만족한다고가정하 자. 다른경우에도같은방법으로증명할수있다. 각 α 와각 β 에대하여 θ = α - β 라고놓자. 위의그림에서원점에서거리가
Phanto 4 Pro DJI PHANTOMTM 4 Pro는 스마트한 프로슈머를 위한 비행 카메라로, 최대 100bps에서 60fps 4K 동영상을 촬영하고 0메가픽셀 스틸 사진을 촬영할 수 있습니다. 4방향 장애물 회피 기능으로 비행 중에 장애물을 지능적으로 회피합니
 퀵 스타트 가이드 V1.0 Phanto 4 Pro DJI PHANTOMTM 4 Pro는 스마트한 프로슈머를 위한 비행 카메라로, 최대 100bps에서 60fps 4K 동영상을 촬영하고 0메가픽셀 스틸 사진을 촬영할 수 있습니다. 4방향 장애물 회피 기능으로 비행 중에 장애물을 지능적으로 회피합니다. DJI GOTM 4 앱에서 업그레이드된 TapFlyTM와 ActiveTrackTM을
퀵 스타트 가이드 V1.0 Phanto 4 Pro DJI PHANTOMTM 4 Pro는 스마트한 프로슈머를 위한 비행 카메라로, 최대 100bps에서 60fps 4K 동영상을 촬영하고 0메가픽셀 스틸 사진을 촬영할 수 있습니다. 4방향 장애물 회피 기능으로 비행 중에 장애물을 지능적으로 회피합니다. DJI GOTM 4 앱에서 업그레이드된 TapFlyTM와 ActiveTrackTM을
<5BB0EDB3ADB5B55D32303131B3E2B4EBBAF12DB0ED312D312DC1DFB0A32DC0B6C7D5B0FAC7D02D28312E28322920BAF2B9F0B0FA20BFF8C0DAC0C720C7FCBCBA2D3031292D3135B9AEC7D72E687770>
 고1 융합 과학 2011년도 1학기 중간고사 대비 다음 글을 읽고 물음에 답하시오. 1 빅뱅 우주론에서 수소와 헬륨 의 형성에 대한 설명으로 옳은 것을 보기에서 모두 고른 것은? 4 서술형 다음 그림은 수소와 헬륨의 동위 원 소의 을 모형으로 나타낸 것이. 우주에서 생성된 수소와 헬륨 의 질량비 는 약 3:1 이. (+)전하를 띠는 양성자와 전기적 중성인 중성자
고1 융합 과학 2011년도 1학기 중간고사 대비 다음 글을 읽고 물음에 답하시오. 1 빅뱅 우주론에서 수소와 헬륨 의 형성에 대한 설명으로 옳은 것을 보기에서 모두 고른 것은? 4 서술형 다음 그림은 수소와 헬륨의 동위 원 소의 을 모형으로 나타낸 것이. 우주에서 생성된 수소와 헬륨 의 질량비 는 약 3:1 이. (+)전하를 띠는 양성자와 전기적 중성인 중성자
1
 1 2 3 4 5 6 b b t P A S M T U s 7 m P P 8 t P A S M T U s 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 Chapter 1 29 1 2 3 4 18 17 16 15 5 6 7 8 9 14 13 12 11 10 1 2 3 4 5 9 10 11 12 13 14 15
1 2 3 4 5 6 b b t P A S M T U s 7 m P P 8 t P A S M T U s 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 Chapter 1 29 1 2 3 4 18 17 16 15 5 6 7 8 9 14 13 12 11 10 1 2 3 4 5 9 10 11 12 13 14 15
이장에서다룰내용 테두리를제어하는스타일시트 외부여백 (Margin) 과내부여백 (Padding) 관련속성 위치관련속성 2
 과내부여백 (Padding) 관련속성 위치관련속성 2") 03 장. 테두리여백지정하는속성 이번장에서는테이블, 레이어, 폼양식등의더예쁘게꾸미기위해서 CSS 를이용하여 HTML 요소의테두리속성을바꾸어보자. 이장에서다룰내용 1 2 3 테두리를제어하는스타일시트 외부여백 (Margin) 과내부여백 (Padding) 관련속성 위치관련속성 2 01. 테두리를제어하는스타일시트 속성값설명 border-width border-left-width
03 장. 테두리여백지정하는속성 이번장에서는테이블, 레이어, 폼양식등의더예쁘게꾸미기위해서 CSS 를이용하여 HTML 요소의테두리속성을바꾸어보자. 이장에서다룰내용 1 2 3 테두리를제어하는스타일시트 외부여백 (Margin) 과내부여백 (Padding) 관련속성 위치관련속성 2 01. 테두리를제어하는스타일시트 속성값설명 border-width border-left-width
<4D F736F F F696E74202D203137C0E55FBFACBDC0B9AEC1A6BCD6B7E7BCC72E707074>
 SIMATIC S7 Siemens AG 2004. All rights reserved. Date: 22.03.2006 File: PRO1_17E.1 차례... 2 심벌리스트... 3 Ch3 Ex2: 프로젝트생성...... 4 Ch3 Ex3: S7 프로그램삽입... 5 Ch3 Ex4: 표준라이브러리에서블록복사... 6 Ch4 Ex1: 실제구성을 PG 로업로드하고이름변경......
SIMATIC S7 Siemens AG 2004. All rights reserved. Date: 22.03.2006 File: PRO1_17E.1 차례... 2 심벌리스트... 3 Ch3 Ex2: 프로젝트생성...... 4 Ch3 Ex3: S7 프로그램삽입... 5 Ch3 Ex4: 표준라이브러리에서블록복사... 6 Ch4 Ex1: 실제구성을 PG 로업로드하고이름변경......
표지 모았어요
 From Bridgestone 4 BRIDGESTONE Magazine Contents On Bridgestone 04 10 12 24 46 48 52 54 56 57 60 Motoring 14 18 20 26 28 32 59 62 Travel / Lifestyle 34 38 44 Section 08 58 63 6 BRIDGESTONE Magazine News
From Bridgestone 4 BRIDGESTONE Magazine Contents On Bridgestone 04 10 12 24 46 48 52 54 56 57 60 Motoring 14 18 20 26 28 32 59 62 Travel / Lifestyle 34 38 44 Section 08 58 63 6 BRIDGESTONE Magazine News
LM 가이드
 SR B 제품치수제원 치수도, 치수표 SR-W 형, SR-WM 형, SR-V 형, SR-VM 형.. SR-TB 형, SR-TBM 형, SR-SB 형, SR-SBM 형.. 레일의표준길이와최대길이... SR 형의 레일탭타입... 옵션... LaCS 및각종씰부착후 블록치수 (L 치수 ).. SR 형전용자바라 JS 형... SR 형전용자바라 DS 형... SR 형전용
SR B 제품치수제원 치수도, 치수표 SR-W 형, SR-WM 형, SR-V 형, SR-VM 형.. SR-TB 형, SR-TBM 형, SR-SB 형, SR-SBM 형.. 레일의표준길이와최대길이... SR 형의 레일탭타입... 옵션... LaCS 및각종씰부착후 블록치수 (L 치수 ).. SR 형전용자바라 JS 형... SR 형전용자바라 DS 형... SR 형전용
A. 학술부문 1. 설계개념및형상설계 (1) 설계목표 < 융합을통한결과물도출 > 저희뉴비팀은기계공학, 디자인공학, 산업디자인, 전자시스템등의다양한전공의학생들로구성이되어있습니다. 각자의전공분야에맞게자신의포지션에서현실적인신비차를제작함을목표로두고있습니다. < 이륙공간의최소화
 설계목표 < 융합을통한결과물도출 > 저희뉴비팀은기계공학, 디자인공학, 산업디자인, 전자시스템등의다양한전공의학생들로구성이되어있습니다. 각자의전공분야에맞게자신의포지션에서현실적인신비차를제작함을목표로두고있습니다. < 이륙공간의최소화") A. 학술부문 1. 설계개념및형상설계 (1) 설계목표 < 융합을통한결과물도출 > 저희뉴비팀은기계공학, 디자인공학, 산업디자인, 전자시스템등의다양한전공의학생들로구성이되어있습니다. 각자의전공분야에맞게자신의포지션에서현실적인신비차를제작함을목표로두고있습니다. < 이륙공간의최소화 (VTOL)> 미래에우리나라의도로는현자동차보급률을보았을때개인용자동차로포화상태가될것입니다.
A. 학술부문 1. 설계개념및형상설계 (1) 설계목표 < 융합을통한결과물도출 > 저희뉴비팀은기계공학, 디자인공학, 산업디자인, 전자시스템등의다양한전공의학생들로구성이되어있습니다. 각자의전공분야에맞게자신의포지션에서현실적인신비차를제작함을목표로두고있습니다. < 이륙공간의최소화 (VTOL)> 미래에우리나라의도로는현자동차보급률을보았을때개인용자동차로포화상태가될것입니다.
1. REACTOR TAP 90% 로변경, 제작공급한사유 - 고객요청사항은 REACTOR 80% 운전기준임. - 삼성테크윈에서사용하는표준 REACTOR 사양은 80%, 75%, 70% 로 STARTER 도면은표준사양으로제출됨. - 동프로젝트용모터사양서 / 성적서확인결과
 1. REACTOR TAP 90% 로변경, 제작공급한사유 - 고객요청사항은 REACTOR 80% 운전기준임. - 삼성테크윈에서사용하는표준 REACTOR 사양은 80%, 75%, 70% 로 STARTER 도면은표준사양으로제출됨. - 동프로젝트용모터사양서 / 성적서확인결과기동전류가 400% 이하로표준모터의 650% 대비상당히낮은기동특성을가지고있어, 압축기운용시기동시간등을감안하여
1. REACTOR TAP 90% 로변경, 제작공급한사유 - 고객요청사항은 REACTOR 80% 운전기준임. - 삼성테크윈에서사용하는표준 REACTOR 사양은 80%, 75%, 70% 로 STARTER 도면은표준사양으로제출됨. - 동프로젝트용모터사양서 / 성적서확인결과기동전류가 400% 이하로표준모터의 650% 대비상당히낮은기동특성을가지고있어, 압축기운용시기동시간등을감안하여
최종 고등수학 하.hwp
 철/벽/수/학 고등수학 (하) 제1부 평면좌표 1 ST 철벽 CONCEPT 01 두점사이의거리 q 수직선위의두점사이의거리 수직선위의두점 A, B 사이의거리는 AB w 좌표평면위의두점사이의거리좌표평면위의두점 A, B 사이의거리는 AB Q❶-1 다음두점사이의거리를구하여라. 풀이 ⑴ A, B ⑵ A, B ⑶ A B ⑷ A B 2 배상면쌤 ^ ^ Q❶-2 다음을만족하는
철/벽/수/학 고등수학 (하) 제1부 평면좌표 1 ST 철벽 CONCEPT 01 두점사이의거리 q 수직선위의두점사이의거리 수직선위의두점 A, B 사이의거리는 AB w 좌표평면위의두점사이의거리좌표평면위의두점 A, B 사이의거리는 AB Q❶-1 다음두점사이의거리를구하여라. 풀이 ⑴ A, B ⑵ A, B ⑶ A B ⑷ A B 2 배상면쌤 ^ ^ Q❶-2 다음을만족하는
Microsoft PowerPoint - FoxFury 카달로그 - 택티컬
 Tactical LED Light 제조사 : (USA) 헤드랜턴형, 써치라이트형, 플래시라이트형라인업보유 고휘도, 광시야각, 긴사용시간 세계유일본질안전방폭기능옵션 (T4~T6등급) 최고급마감및뛰어난디자인 제품은 미국및세계유수의정부기관및단체에서채택되어사용되고있습니다. 단순한랜턴과달리과학적인설계및디자인으로특화된제품을제공합니다. 헤드랜턴시리즈는타제품에서구현하지못하는광시야각을제공합니다.
Tactical LED Light 제조사 : (USA) 헤드랜턴형, 써치라이트형, 플래시라이트형라인업보유 고휘도, 광시야각, 긴사용시간 세계유일본질안전방폭기능옵션 (T4~T6등급) 최고급마감및뛰어난디자인 제품은 미국및세계유수의정부기관및단체에서채택되어사용되고있습니다. 단순한랜턴과달리과학적인설계및디자인으로특화된제품을제공합니다. 헤드랜턴시리즈는타제품에서구현하지못하는광시야각을제공합니다.
 i - ii - iii - 1 - 연도 보험급여 총계 (A) 장해급여 유족급여 일시금연금일시금연금 연금계 (B) 연금비중 (B/A, %) 기타 급여 1) 1998 14,511 3,377 979 1,657 30 1,009 7.0 8,467 1999 12,742 2,318 1,120 1,539 38 1,158 9.1 7,727 2000 14,563 2,237 1,367
i - ii - iii - 1 - 연도 보험급여 총계 (A) 장해급여 유족급여 일시금연금일시금연금 연금계 (B) 연금비중 (B/A, %) 기타 급여 1) 1998 14,511 3,377 979 1,657 30 1,009 7.0 8,467 1999 12,742 2,318 1,120 1,539 38 1,158 9.1 7,727 2000 14,563 2,237 1,367
쌍백합23호3
 4 5 6 7 여행 스테인드글라스 을 노래했던 하느님의 영원한 충만성을 상징하는 불꽃이다. 작품 마르코 수사(떼제공동체) 사진 유백영 가브리엘(가톨릭 사진가회) 빛은 하나의 불꽃으로 형상화하였다. 천사들과 뽑힌 이들이 거룩하시다. 거룩하시다. 거룩하시다. 하며 세 겹의 거룩하심 가 있을 것이다. 빛이 생겨라. 유리화라는 조그만 공간에 표현된 우주적 사건인 셈이다.
4 5 6 7 여행 스테인드글라스 을 노래했던 하느님의 영원한 충만성을 상징하는 불꽃이다. 작품 마르코 수사(떼제공동체) 사진 유백영 가브리엘(가톨릭 사진가회) 빛은 하나의 불꽃으로 형상화하였다. 천사들과 뽑힌 이들이 거룩하시다. 거룩하시다. 거룩하시다. 하며 세 겹의 거룩하심 가 있을 것이다. 빛이 생겨라. 유리화라는 조그만 공간에 표현된 우주적 사건인 셈이다.
[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (
![[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (](/thumbs/103/157216582.jpg "[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (") [ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : 2013. 4. 1 ~ 2014. 12. 31 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 ( 울산과학고 ) 권범석 ( 울산과학고 ) 김진영 ( 울산과학고 ) 조희제 ( 울산과학고 ) .
[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : 2013. 4. 1 ~ 2014. 12. 31 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 ( 울산과학고 ) 권범석 ( 울산과학고 ) 김진영 ( 울산과학고 ) 조희제 ( 울산과학고 ) .
HXG350 설치부품 HXG0350IP03-FC-150 HSX0350IP04-FFC-350 HSX0350IP03-FCS-32
 HXG350 파워라인시리즈는가장작지만가장강력한피스톤로드가스스프링이며, 휴대용이하고강력합니다. 3500N에서 66000N까지의힘이허용되며, 스트로크길이는 10mm에서 125mm까지입니다. 가스충진은옆쪽의 C-groove와 U-groove가함께있으며, 다양한마운팅, 스텐다드마운팅과결합가능합니다. 기술제원 충진원료 충진압력 N2 가스 180bar/2610psi 작업온도
HXG350 파워라인시리즈는가장작지만가장강력한피스톤로드가스스프링이며, 휴대용이하고강력합니다. 3500N에서 66000N까지의힘이허용되며, 스트로크길이는 10mm에서 125mm까지입니다. 가스충진은옆쪽의 C-groove와 U-groove가함께있으며, 다양한마운팅, 스텐다드마운팅과결합가능합니다. 기술제원 충진원료 충진압력 N2 가스 180bar/2610psi 작업온도
슬라이드 1
 10. 기본설계도면 016 년상반기 김수영 10-1. 기본설계도면 기본설계도면의내용 선도 (ines 10-1. 기본설계도면 기본설계도면의내용 중앙횡단면도 (Midship Section 10-1. 기본설계도면 기본설계도면의내용 일반배치도 (General Arrangement 10-. 선도의작성 ines 의투영도 10-. 선형의구성 / 특징 선수형상 선박의종류
10. 기본설계도면 016 년상반기 김수영 10-1. 기본설계도면 기본설계도면의내용 선도 (ines 10-1. 기본설계도면 기본설계도면의내용 중앙횡단면도 (Midship Section 10-1. 기본설계도면 기본설계도면의내용 일반배치도 (General Arrangement 10-. 선도의작성 ines 의투영도 10-. 선형의구성 / 특징 선수형상 선박의종류
LM 가이드
 SSR 볼리테이너타입 가이드 B 제품치수제원 치수도, 치수표 SSR-XW 형, SSR-XWM 형... SSR-XV 형, SSR-XVM 형... SSR-XTB 형... 레일의표준길이와최대길이... SSR 형의 레일탭타입... 옵션... LaCS 및각종씰부착후 블록치수 (L 치수 ).. LaCS 부착후의그리스니플증가치수.. LiCS 부착후의 블록치수 (L 치수
SSR 볼리테이너타입 가이드 B 제품치수제원 치수도, 치수표 SSR-XW 형, SSR-XWM 형... SSR-XV 형, SSR-XVM 형... SSR-XTB 형... 레일의표준길이와최대길이... SSR 형의 레일탭타입... 옵션... LaCS 및각종씰부착후 블록치수 (L 치수 ).. LaCS 부착후의그리스니플증가치수.. LiCS 부착후의 블록치수 (L 치수
SIGIL 완벽입문
 누구나 만드는 전자책 SIGIL 을 이용해 전자책을 만들기 EPUB 전자책이 가지는 단점 EPUB이라는 포맷과 제일 많이 비교되는 포맷은 PDF라는 포맷 입니다. EPUB이 나오기 전까지 전 세계에서 가장 많이 사용되던 전자책 포맷이고, 아직도 많이 사 용되기 때문이기도 한며, 또한 PDF는 종이책 출력을 위해서도 사용되기 때문에 종이책 VS
누구나 만드는 전자책 SIGIL 을 이용해 전자책을 만들기 EPUB 전자책이 가지는 단점 EPUB이라는 포맷과 제일 많이 비교되는 포맷은 PDF라는 포맷 입니다. EPUB이 나오기 전까지 전 세계에서 가장 많이 사용되던 전자책 포맷이고, 아직도 많이 사 용되기 때문이기도 한며, 또한 PDF는 종이책 출력을 위해서도 사용되기 때문에 종이책 VS
Microsoft Word - 4장_처짐각법.doc
 동아대학교토목공학과구조역학 4. 처짐각법 변위법 (Slope Deflection ethod Displacement ethod) Objective of this chapter: 처짐각법의기본개념. What will be presented: 처짐각법을이용한다차부정정보해석 처짐각법을이용한다차부정정골조해석 Theoretical background 미국미네소타대학의
동아대학교토목공학과구조역학 4. 처짐각법 변위법 (Slope Deflection ethod Displacement ethod) Objective of this chapter: 처짐각법의기본개념. What will be presented: 처짐각법을이용한다차부정정보해석 처짐각법을이용한다차부정정골조해석 Theoretical background 미국미네소타대학의
Microsoft PowerPoint - Ch13
 Ch. 13 Basic OP-AMP Circuits 비교기 (Comparator) 하나의전압을다른전압 ( 기준전압, reference) 와비교하기위한비선형장치 영전위검출 in > 기준전압 out = out(max) in < 기준전압 out = out(min) 비교기 영이아닌전위검출 기준배터리 기준전압분배기 기준전압제너다이오드 비교기 예제 13-1: out(max)
Ch. 13 Basic OP-AMP Circuits 비교기 (Comparator) 하나의전압을다른전압 ( 기준전압, reference) 와비교하기위한비선형장치 영전위검출 in > 기준전압 out = out(max) in < 기준전압 out = out(min) 비교기 영이아닌전위검출 기준배터리 기준전압분배기 기준전압제너다이오드 비교기 예제 13-1: out(max)
6943-427622062-1.pdf
 Owner s manual Kuo+ 폴딩방법 1. 페달을 그림과 같이 접어 줍니다.(A) 2. 핸들바를 아래로 내리기 위해 레버를 엽니다. 3. 이제 핸들 포스트를 아래로 접기 위해, 레버 고정 장치(B)를 돌려서 (C) 레버를 내립니다. 앞바퀴 옆쪽으로 핸들 포스트를 꺽어 접습니다. 4. 한 손으로는 레버 고정 장치를 그림
Owner s manual Kuo+ 폴딩방법 1. 페달을 그림과 같이 접어 줍니다.(A) 2. 핸들바를 아래로 내리기 위해 레버를 엽니다. 3. 이제 핸들 포스트를 아래로 접기 위해, 레버 고정 장치(B)를 돌려서 (C) 레버를 내립니다. 앞바퀴 옆쪽으로 핸들 포스트를 꺽어 접습니다. 4. 한 손으로는 레버 고정 장치를 그림
API 매뉴얼
 PCI-DIO12 API Programming (Rev 1.0) Windows, Windows2000, Windows NT and Windows XP are trademarks of Microsoft. We acknowledge that the trademarks or service names of all other organizations mentioned
PCI-DIO12 API Programming (Rev 1.0) Windows, Windows2000, Windows NT and Windows XP are trademarks of Microsoft. We acknowledge that the trademarks or service names of all other organizations mentioned
1_12-53(김동희)_.hwp
_.hwp") 본논문은 2012년전력전자학술대회우수추천논문임 Cascaded BuckBoost 컨버터를 이용한 태양광 모듈 집적형 저전압 배터리 충전 장치 개발 472 강압이 가능한 토폴로지를 이용한 연구도 진행되었지만 제어 알고리즘의 용의성과 구조의 간단함 때문에 BuckBoost 컨버터 또는 Sepic 컨버터를 이용하여 연구 가 진행되었다[10][13]. 태양광 발전
본논문은 2012년전력전자학술대회우수추천논문임 Cascaded BuckBoost 컨버터를 이용한 태양광 모듈 집적형 저전압 배터리 충전 장치 개발 472 강압이 가능한 토폴로지를 이용한 연구도 진행되었지만 제어 알고리즘의 용의성과 구조의 간단함 때문에 BuckBoost 컨버터 또는 Sepic 컨버터를 이용하여 연구 가 진행되었다[10][13]. 태양광 발전
RVC Robot Vaccum Cleaner
 RVC Robot Vacuum 200810048 정재근 200811445 이성현 200811414 김연준 200812423 김준식 Statement of purpose Robot Vacuum (RVC) - An RVC automatically cleans and mops household surface. - It goes straight forward while
RVC Robot Vacuum 200810048 정재근 200811445 이성현 200811414 김연준 200812423 김준식 Statement of purpose Robot Vacuum (RVC) - An RVC automatically cleans and mops household surface. - It goes straight forward while
STATICS Page: 7-1 Tel: (02) Fax: (02) Instructor: Nam-Hoi, Park Date: / / Ch.7 트러스 (Truss) * 트러스의분류 트러스 ( 차원 ): 1. 평면트러스 (planar tru
 Fax: (02) Instructor: Nam-Hoi, Park Date: / / Ch.7 트러스 (Truss) * 트러스의분류 트러스 ( 차원 ): 1. 평면트러스 (planar tru") STATICS Page: 7-1 Instructor: Nam-Hoi, Park Date: / / Ch.7 트러스 (Truss) * 트러스의분류 트러스 ( 차원 ): 1. 평면트러스 (planar truss) - 2 차원 2. 공간트러스 or 입체트러스 (space truss)-3 차원트러스 ( 형태 ): 1. 단순트러스 (simple truss) 삼각형형태의트러스
STATICS Page: 7-1 Instructor: Nam-Hoi, Park Date: / / Ch.7 트러스 (Truss) * 트러스의분류 트러스 ( 차원 ): 1. 평면트러스 (planar truss) - 2 차원 2. 공간트러스 or 입체트러스 (space truss)-3 차원트러스 ( 형태 ): 1. 단순트러스 (simple truss) 삼각형형태의트러스
Phantom 4 DJI Phantom 4은(는) 별도의 장치 없이 물체를 지능적으로 추적하고 장애물을 피하면서 손가락으로 탭하여 비행할 수 있는 아주 스마트한 비행 카메라입니다. 비행 중에 4K 비디오 또는 12메가픽셀 정지 화상을 촬영합니다. TapFly와 Acti
 별도의 장치 없이 물체를 지능적으로 추적하고 장애물을 피하면서 손가락으로 탭하여 비행할 수 있는 아주 스마트한 비행 카메라입니다. 비행 중에 4K 비디오 또는 12메가픽셀 정지 화상을 촬영합니다. TapFly와 Acti") PHANTOM 4 퀵 스타트 가이드 V1.2 Phantom 4 DJI Phantom 4은(는) 별도의 장치 없이 물체를 지능적으로 추적하고 장애물을 피하면서 손가락으로 탭하여 비행할 수 있는 아주 스마트한 비행 카메라입니다. 비행 중에 4K 비디오 또는 12메가픽셀 정지 화상을 촬영합니다. TapFly와 ActiveTrack은 Phantom 4의 고유한 기능으로
PHANTOM 4 퀵 스타트 가이드 V1.2 Phantom 4 DJI Phantom 4은(는) 별도의 장치 없이 물체를 지능적으로 추적하고 장애물을 피하면서 손가락으로 탭하여 비행할 수 있는 아주 스마트한 비행 카메라입니다. 비행 중에 4K 비디오 또는 12메가픽셀 정지 화상을 촬영합니다. TapFly와 ActiveTrack은 Phantom 4의 고유한 기능으로
Windows 8에서 BioStar 1 설치하기
 / 콘텐츠 테이블... PC에 BioStar 1 설치 방법... Microsoft SQL Server 2012 Express 설치하기... Running SQL 2012 Express Studio... DBSetup.exe 설정하기... BioStar 서버와 클라이언트 시작하기... 1 1 2 2 6 7 1/11 BioStar 1, Windows 8 BioStar
/ 콘텐츠 테이블... PC에 BioStar 1 설치 방법... Microsoft SQL Server 2012 Express 설치하기... Running SQL 2012 Express Studio... DBSetup.exe 설정하기... BioStar 서버와 클라이언트 시작하기... 1 1 2 2 6 7 1/11 BioStar 1, Windows 8 BioStar
FGB-P 학번수학과권혁준 2008 년 5 월 19 일 Lemma 1 p 를 C([0, 1]) 에속하는음수가되지않는함수라하자. 이때 y C 2 (0, 1) C([0, 1]) 가미분방정식 y (t) + p(t)y(t) = 0, t (0, 1), y(0)
![FGB-P 학번수학과권혁준 2008 년 5 월 19 일 Lemma 1 p 를 C([0, 1]) 에속하는음수가되지않는함수라하자. 이때 y C 2 (0, 1) C([0, 1]) 가미분방정식 y (t) + p(t)y(t) = 0, t (0, 1), y(0)](/thumbs/94/121635808.jpg "FGB-P 학번수학과권혁준 2008 년 5 월 19 일 Lemma 1 p 를 C([0, 1]) 에속하는음수가되지않는함수라하자. 이때 y C 2 (0, 1) C([0, 1]) 가미분방정식 y (t) + p(t)y(t) = 0, t (0, 1), y(0)") FGB-P8-3 8 학번수학과권혁준 8 년 5 월 9 일 Lemma p 를 C[, ] 에속하는음수가되지않는함수라하자. 이때 y C, C[, ] 가미분방정식 y t + ptyt, t,, y y 을만족하는해라고하면, y 는, 에서연속적인이계도함수를가지게확 장될수있다. Proof y 은 y 의도함수이므로미적분학의기본정리에의하여, y 은 y 의어떤원시 함수와적분상수의합으로표시될수있다.
FGB-P8-3 8 학번수학과권혁준 8 년 5 월 9 일 Lemma p 를 C[, ] 에속하는음수가되지않는함수라하자. 이때 y C, C[, ] 가미분방정식 y t + ptyt, t,, y y 을만족하는해라고하면, y 는, 에서연속적인이계도함수를가지게확 장될수있다. Proof y 은 y 의도함수이므로미적분학의기본정리에의하여, y 은 y 의어떤원시 함수와적분상수의합으로표시될수있다.
Python과 함께 배우는 신호 해석 제 5 강. 복소수 연산 및 Python을 이용한 복소수 연산 (제 2 장. 복소수 기초)
") 제 5 강. 복소수연산및 을이용한복소수연산 ( 제 2 장. 복소수기초 ) 한림대학교전자공학과 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 1 배울내용 복소수의기본개념복소수의표현오일러 (Euler) 공식복소수의대수연산 1의 N 승근 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 2 복소수의 4 칙연산 복소수의덧셈과뺄셈에는직각좌표계표현을사용하고,
제 5 강. 복소수연산및 을이용한복소수연산 ( 제 2 장. 복소수기초 ) 한림대학교전자공학과 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 1 배울내용 복소수의기본개념복소수의표현오일러 (Euler) 공식복소수의대수연산 1의 N 승근 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 2 복소수의 4 칙연산 복소수의덧셈과뺄셈에는직각좌표계표현을사용하고,
(b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로
 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로") Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
슬라이드 1
 마이크로컨트롤러 2 (MicroController2) 2 강 ATmega128 의 external interrupt 이귀형교수님 학습목표 interrupt 란무엇인가? 기본개념을알아본다. interrupt 중에서가장사용하기쉬운 external interrupt 의사용방법을학습한다. 1. Interrupt 는왜필요할까? 함수동작을추가하여실행시키려면? //***
마이크로컨트롤러 2 (MicroController2) 2 강 ATmega128 의 external interrupt 이귀형교수님 학습목표 interrupt 란무엇인가? 기본개념을알아본다. interrupt 중에서가장사용하기쉬운 external interrupt 의사용방법을학습한다. 1. Interrupt 는왜필요할까? 함수동작을추가하여실행시키려면? //***
À̵¿·Îº¿ÀÇ ÀÎÅͳݱâ¹Ý ¿ø°ÝÁ¦¾î½Ã ½Ã°£Áö¿¬¿¡_.hwp
 l Y ( X g, Y g ) r v L v v R L θ X ( X c, Yc) W (a) (b) DC 12V 9A Battery 전원부 DC-DC Converter +12V, -12V DC-DC Converter 5V DC-AC Inverter AC 220V DC-DC Converter 3.3V Motor Driver 80196kc,PWM Main
l Y ( X g, Y g ) r v L v v R L θ X ( X c, Yc) W (a) (b) DC 12V 9A Battery 전원부 DC-DC Converter +12V, -12V DC-DC Converter 5V DC-AC Inverter AC 220V DC-DC Converter 3.3V Motor Driver 80196kc,PWM Main
HX170 설치부품 HX series HX0170IP03-FCR-19 HX0170IP03-FCR-90 HX0170IP03-BF-19
 ` HX170 파워라인시리즈는가장길이가짧고가장강력한피스톤로드씰의가스스프링입 니다. 장소활용에최적합니다. 파워라인스프링은 1700N 에서 95000N 까지의힘과 7 에서 125 까지의스트로크까지허용됩니다. HX170 은밑부분의 Port 연결부에서 Micro Hose TM 호스시스템으로가스가충전됩니다. 180bar/2610psi Lmin L HX170-007 7
` HX170 파워라인시리즈는가장길이가짧고가장강력한피스톤로드씰의가스스프링입 니다. 장소활용에최적합니다. 파워라인스프링은 1700N 에서 95000N 까지의힘과 7 에서 125 까지의스트로크까지허용됩니다. HX170 은밑부분의 Port 연결부에서 Micro Hose TM 호스시스템으로가스가충전됩니다. 180bar/2610psi Lmin L HX170-007 7
오토 2, 3월호 내지최종
 Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
Structure and Interpretation of Computer Programs: Assignment 3 Seung-Hoon Na October 4, George (아래 3개의 문제에 대한 구현이 모두 포함된 george.rkt파일을 제출하시오.
 Structure and Interpretation of Computer Programs: Assignment 3 Seung-Hoon Na October 4, 2018 1 George (아래 3개의 문제에 대한 구현이 모두 포함된 george.rkt파일을 제출하시오. 실행후 Problem 1.3에 대한 Display결과가 나와야 함) George 그림은 다음과
Structure and Interpretation of Computer Programs: Assignment 3 Seung-Hoon Na October 4, 2018 1 George (아래 3개의 문제에 대한 구현이 모두 포함된 george.rkt파일을 제출하시오. 실행후 Problem 1.3에 대한 Display결과가 나와야 함) George 그림은 다음과
Xcrypt 내장형 X211SCI 수신기 KBS World 채널 설정법
 [ X211S CI 위성방송수신기 - KBS World 채널 설정법 ] 세기위성 T: 82-2-2231-7989, F: 82-2-2232-6373 http://www.sekisat.com webmaster@sekisat.com 주의사항 구매 전에, 위의 X211S CI 수신기의 재고가 당사에 충분히 있는지, 미리 확인바랍니다. 본 제품은 Xcrypt
[ X211S CI 위성방송수신기 - KBS World 채널 설정법 ] 세기위성 T: 82-2-2231-7989, F: 82-2-2232-6373 http://www.sekisat.com webmaster@sekisat.com 주의사항 구매 전에, 위의 X211S CI 수신기의 재고가 당사에 충분히 있는지, 미리 확인바랍니다. 본 제품은 Xcrypt
차 례 4
 제 50 회전국과학전람회 2004. 07. 20 차 례 4 - 1 - 표 2. 천체의화각 표 1. 초점거리와화각 - 2 - 그림 1. 목성의표면구조 - 3 - 그림 2. 목성위성의상호현상 - 4 - π 공전속도 원궤도의반지름 π 그림 3. 케플러회전 - 5 - 표 3. 목성의궤도자료 표 4. 목성의물리자료 표 5. 4 대위성의궤도자료및물리자료 - 6 - 그림
제 50 회전국과학전람회 2004. 07. 20 차 례 4 - 1 - 표 2. 천체의화각 표 1. 초점거리와화각 - 2 - 그림 1. 목성의표면구조 - 3 - 그림 2. 목성위성의상호현상 - 4 - π 공전속도 원궤도의반지름 π 그림 3. 케플러회전 - 5 - 표 3. 목성의궤도자료 표 4. 목성의물리자료 표 5. 4 대위성의궤도자료및물리자료 - 6 - 그림
제목을 입력하십시오
 포워드, 플라이백컨버터 Prof. ByoungKuk ee, Ph.D. Energy echaronics ab. chool of Informaion and Communicaion Eng. ungkyunkwan Universiy Tel: 823299458 Fax: 823299462 hp://seml.skku.ac.kr E: bkleeskku@skku.edu Forward
포워드, 플라이백컨버터 Prof. ByoungKuk ee, Ph.D. Energy echaronics ab. chool of Informaion and Communicaion Eng. ungkyunkwan Universiy Tel: 823299458 Fax: 823299462 hp://seml.skku.ac.kr E: bkleeskku@skku.edu Forward
<30325FBCF6C7D05FB9AEC7D7C1F62E687770>
 고1 2015학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 1. 두복소수, 에대하여 의값은? ( 단, ) [2 점 ] 1 2 3 4 5 3. 좌표평면위의두점 P, Q 사이의거리는? [2 점 ] 1 2 3 4 5 2. 두다항식, 에대하여 를간단히하면? [2점] 4. 에서이차함수 의최댓값을, 최솟값을 이라할때, 의값은? [3점] 1
고1 2015학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 1. 두복소수, 에대하여 의값은? ( 단, ) [2 점 ] 1 2 3 4 5 3. 좌표평면위의두점 P, Q 사이의거리는? [2 점 ] 1 2 3 4 5 2. 두다항식, 에대하여 를간단히하면? [2점] 4. 에서이차함수 의최댓값을, 최솟값을 이라할때, 의값은? [3점] 1
 *) α ρ : 0.7 0.5 0.5 0.7 0.5 0.5-1 - 1 - - 0.7 (**) 0.5 0.5-1 - (**) Max i e i Max 1 =150 kg e 1 = 50 g xxx.050 kg xxx.050 kg xxx.05 kg xxx.05 kg Max 2=300 kg
*) α ρ : 0.7 0.5 0.5 0.7 0.5 0.5-1 - 1 - - 0.7 (**) 0.5 0.5-1 - (**) Max i e i Max 1 =150 kg e 1 = 50 g xxx.050 kg xxx.050 kg xxx.05 kg xxx.05 kg Max 2=300 kg
PowerPoint Presentation
 5 불대수 IT CookBook, 디지털논리회로 - 2 - 학습목표 기본논리식의표현방법을알아본다. 불대수의법칙을알아본다. 논리회로를논리식으로논리식을논리회로로표현하는방법을알아본다. 곱의합 (SOP) 과합의곱 (POS), 최소항 (minterm) 과최대항 (mxterm) 에대해알아본다. 01. 기본논리식의표현 02. 불대수법칙 03. 논리회로의논리식변환 04.
5 불대수 IT CookBook, 디지털논리회로 - 2 - 학습목표 기본논리식의표현방법을알아본다. 불대수의법칙을알아본다. 논리회로를논리식으로논리식을논리회로로표현하는방법을알아본다. 곱의합 (SOP) 과합의곱 (POS), 최소항 (minterm) 과최대항 (mxterm) 에대해알아본다. 01. 기본논리식의표현 02. 불대수법칙 03. 논리회로의논리식변환 04.
제 53 회서울특별시과학전람회 예선대회작품설명서 본선대회작품설명서 쓰나미의피해를최소화시키는건물과 건물배치에대한탐구 출품번호 S-504 출품분야학생부출품부문지구과학 학교명학년 ( 직위 ) 성명
 성명") 제 53 회서울특별시과학전람회 예선대회작품설명서 본선대회작품설명서 쓰나미의피해를최소화시키는건물과 건물배치에대한탐구 출품번호 S-504 출품분야학생부출품부문지구과학 2012. 5. 14. 학교명학년 ( 직위 ) 성명 - 1 - 그림 1 쓰나미의발생과정 그림 2 실제쓰나미의사진 ρ - 2 - 그림 3 땅을파는모습그림 4 완성된수조의모습 - 3 - 그림 5 삼각기둥그림
제 53 회서울특별시과학전람회 예선대회작품설명서 본선대회작품설명서 쓰나미의피해를최소화시키는건물과 건물배치에대한탐구 출품번호 S-504 출품분야학생부출품부문지구과학 2012. 5. 14. 학교명학년 ( 직위 ) 성명 - 1 - 그림 1 쓰나미의발생과정 그림 2 실제쓰나미의사진 ρ - 2 - 그림 3 땅을파는모습그림 4 완성된수조의모습 - 3 - 그림 5 삼각기둥그림
BY-FDP-4-70.hwp
 RS-232, RS485 FND Display Module BY-FDP-4-70-XX (Rev 1.0) - 1 - 1. 개요. 본 Display Module은 RS-232, RS-485 겸용입니다. Power : DC24V, DC12V( 주문사양). Max Current : 0.6A 숫자크기 : 58mm(FND Size : 70x47mm 4 개) RS-232,
RS-232, RS485 FND Display Module BY-FDP-4-70-XX (Rev 1.0) - 1 - 1. 개요. 본 Display Module은 RS-232, RS-485 겸용입니다. Power : DC24V, DC12V( 주문사양). Max Current : 0.6A 숫자크기 : 58mm(FND Size : 70x47mm 4 개) RS-232,
슬라이드 1
 프로세싱 광운대학교로봇학부박광현 프로세싱실행 2 C:\processing-3.2.1 폴더 창나타내기 실행 정지 3 폭 높이 600 400 도형그리기 배경칠하기 5 background(255, 255, 255); R G B background(255, 0, 0); background(255, 122, 0); 선그리기 6 background(255, 122, 0);
프로세싱 광운대학교로봇학부박광현 프로세싱실행 2 C:\processing-3.2.1 폴더 창나타내기 실행 정지 3 폭 높이 600 400 도형그리기 배경칠하기 5 background(255, 255, 255); R G B background(255, 0, 0); background(255, 122, 0); 선그리기 6 background(255, 122, 0);
(72) 발명자 오승용 경기도안산시상록구오목로 11 길 45, 202 호 ( 본오동 ) 박영욱 경기도수원시권선구당진로 31 번길 16, 한라비발디 202 동 1201 호 ( 당수동 ) 고대화 경기도수원시권선구금호로 189 번길 82-12, 202 호 ( 구운동 ) 김준
 발명자 오승용 경기도안산시상록구오목로 11 길 45, 202 호 ( 본오동 ) 박영욱 경기도수원시권선구당진로 31 번길 16, 한라비발디 202 동 1201 호 ( 당수동 ) 고대화 경기도수원시권선구금호로 189 번길 82-12, 202 호 ( 구운동 ) 김준") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2013년06월24일 (11) 등록번호 10-1278021 (24) 등록일자 2013년06월18일 (51) 국제특허분류 (Int. Cl.) B65G 1/12 (2006.01) B65G 1/06 (2006.01) H01L 21/677 (2006.01) B25J 5/00 (2006.01)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2013년06월24일 (11) 등록번호 10-1278021 (24) 등록일자 2013년06월18일 (51) 국제특허분류 (Int. Cl.) B65G 1/12 (2006.01) B65G 1/06 (2006.01) H01L 21/677 (2006.01) B25J 5/00 (2006.01)
Windows 10 General Announcement v1.0-KO
 Windows 10 Fuji Xerox 장비와의호환성 v1.0 7 July, 2015 머리말 Microsoft 는 Windows 10 이 Windows 자동업데이트기능을통해예약되어질수있다고 6 월 1 일발표했다. 고객들은 윈도우 10 공지알림을받기 를표시하는새로운아이콘을알아차릴수있습니다. Fuji Xerox 는 Microsoft 에서가장최신운영시스템인 Windows
Windows 10 Fuji Xerox 장비와의호환성 v1.0 7 July, 2015 머리말 Microsoft 는 Windows 10 이 Windows 자동업데이트기능을통해예약되어질수있다고 6 월 1 일발표했다. 고객들은 윈도우 10 공지알림을받기 를표시하는새로운아이콘을알아차릴수있습니다. Fuji Xerox 는 Microsoft 에서가장최신운영시스템인 Windows
기업분석(Update)
") 1.. Quantitative Analyst 이창환 91-73 ch.lee@ibks.com Sector Monitor: 업종별수익률 : Cyclical 업종이 Defensive 업종대비아웃퍼폼 이익모멘텀 : 1개월전대비 EPS 전망치변화율은업종전반적으로 (+) 를기록. ERR 역시전반적으로 (+) 를기록한가운데 와, 업종이두드러짐. 개월선행 EPS 전망치는,,
1.. Quantitative Analyst 이창환 91-73 ch.lee@ibks.com Sector Monitor: 업종별수익률 : Cyclical 업종이 Defensive 업종대비아웃퍼폼 이익모멘텀 : 1개월전대비 EPS 전망치변화율은업종전반적으로 (+) 를기록. ERR 역시전반적으로 (+) 를기록한가운데 와, 업종이두드러짐. 개월선행 EPS 전망치는,,
Pascal N2 gas springs
 N2 gas springs www.pascaleng.co.jp Pascal N2 gas springs 페이지 가스스프링모델일람 와 의차이 가스스프링취급주의 배관 나사커넥터 나사커넥터 가스충전기구 가스스프링모델일람 가스스프링모델일람 가스스프링사양일람 형식 구조사이즈 실린더경 초기하중 페이지 표준모델 페이지 콤팩트모델 페이지 하이파워 쇼트스트로크모델 페이지 롱스트로크모델
N2 gas springs www.pascaleng.co.jp Pascal N2 gas springs 페이지 가스스프링모델일람 와 의차이 가스스프링취급주의 배관 나사커넥터 나사커넥터 가스충전기구 가스스프링모델일람 가스스프링모델일람 가스스프링사양일람 형식 구조사이즈 실린더경 초기하중 페이지 표준모델 페이지 콤팩트모델 페이지 하이파워 쇼트스트로크모델 페이지 롱스트로크모델
Microsoft PowerPoint - chap06-1Array.ppt
 2010-1 학기프로그래밍입문 (1) chapter 06-1 참고자료 배열 박종혁 Tel: 970-6702 Email: jhpark1@snut.ac.kr 한빛미디어 출처 : 뇌를자극하는 C프로그래밍, 한빛미디어 -1- 배열의선언과사용 같은형태의자료형이많이필요할때배열을사용하면효과적이다. 배열의선언 배열의사용 배열과반복문 배열의초기화 유연성있게배열다루기 한빛미디어
2010-1 학기프로그래밍입문 (1) chapter 06-1 참고자료 배열 박종혁 Tel: 970-6702 Email: jhpark1@snut.ac.kr 한빛미디어 출처 : 뇌를자극하는 C프로그래밍, 한빛미디어 -1- 배열의선언과사용 같은형태의자료형이많이필요할때배열을사용하면효과적이다. 배열의선언 배열의사용 배열과반복문 배열의초기화 유연성있게배열다루기 한빛미디어
Microsoft Word - EastSocket매뉴얼_ _.doc
 USB 전원을이용한 SMD 패키지라이팅지원보드 저가의라이팅장비를사용하여 SMD 패키지마이컴을라이팅할수있도록지원하는장비입니다. 각종제품개발시마이컴을 SMD로사용하는추세로이를양산에적용시고가의장비를사용해야했습니다. 아니면보드에다운로더를사용하여마이컴라이팅을했습니다. 그에따른생산속도의저하및고가의장비구입에따른경제적부담이컸습니다. 이를대처하기위해저가및기존개발에사용한장비를그대로사용하여라이팅을할수있는지원장비를개발했습니다.
USB 전원을이용한 SMD 패키지라이팅지원보드 저가의라이팅장비를사용하여 SMD 패키지마이컴을라이팅할수있도록지원하는장비입니다. 각종제품개발시마이컴을 SMD로사용하는추세로이를양산에적용시고가의장비를사용해야했습니다. 아니면보드에다운로더를사용하여마이컴라이팅을했습니다. 그에따른생산속도의저하및고가의장비구입에따른경제적부담이컸습니다. 이를대처하기위해저가및기존개발에사용한장비를그대로사용하여라이팅을할수있는지원장비를개발했습니다.
MakerSprit_MPack제안서
 쉽고 재미있는 코딩학습 교구- CODING BOX CODING BOX 코딩박스 선생님과 학생 모두를 위한 소프트웨어 교육프로그램입니다. 코딩+종이로봇+아두이노 3개를 한번에 배웁니다. 소프트웨어 교육은 받았긴 했지만 그 다음에 무엇을 어떻게 해야할지 모르신다면 이제 피지컬컴퓨팅 수업을 들어보세요. 컴 퓨터의 모니터화면에서 벗어나 이제 실제로 움직임을 제어해보는
쉽고 재미있는 코딩학습 교구- CODING BOX CODING BOX 코딩박스 선생님과 학생 모두를 위한 소프트웨어 교육프로그램입니다. 코딩+종이로봇+아두이노 3개를 한번에 배웁니다. 소프트웨어 교육은 받았긴 했지만 그 다음에 무엇을 어떻게 해야할지 모르신다면 이제 피지컬컴퓨팅 수업을 들어보세요. 컴 퓨터의 모니터화면에서 벗어나 이제 실제로 움직임을 제어해보는
untitled
 기능에대한일반정보 기능에대한일반정보 Scania 는세가지속도제한기능을제공합니다. 이러한기능을통해쓰레기수거차량, 소방용엔진및중량물수송용트랙터등과관련된고객및법적요건을만족시킬수있습니다. 속도제한기 은표준기능이며모든차량에장착되어있습니다. 차량속도제한기 는 BWS 컨트롤유니트 (FPC339A) 에포함되어있습니다. 기존차량의경우에는이기능이 EMS 컨트롤유니트 ( 엔진컨트롤유니트
기능에대한일반정보 기능에대한일반정보 Scania 는세가지속도제한기능을제공합니다. 이러한기능을통해쓰레기수거차량, 소방용엔진및중량물수송용트랙터등과관련된고객및법적요건을만족시킬수있습니다. 속도제한기 은표준기능이며모든차량에장착되어있습니다. 차량속도제한기 는 BWS 컨트롤유니트 (FPC339A) 에포함되어있습니다. 기존차량의경우에는이기능이 EMS 컨트롤유니트 ( 엔진컨트롤유니트
LM 가이드
 HSR 가이드 제품치수제원 치수도, 치수표 HSR-A 형, HSR-A 형, HSR-LA 형, HSR-LA 형.. HSR- 형, HSR- 형, HSR-L 형, HSR-L 형.. HSR-C 형 Ct 급... HSR-R 형... HSR-R 형, HSR-R 형, HSR-LR 형, HSR-LR 형.. HSR-R 형 Ct 급... HSR-YR 형, HSR-YR 형...
HSR 가이드 제품치수제원 치수도, 치수표 HSR-A 형, HSR-A 형, HSR-LA 형, HSR-LA 형.. HSR- 형, HSR- 형, HSR-L 형, HSR-L 형.. HSR-C 형 Ct 급... HSR-R 형... HSR-R 형, HSR-R 형, HSR-LR 형, HSR-LR 형.. HSR-R 형 Ct 급... HSR-YR 형, HSR-YR 형...
그룹웨어와 XXXXX 제목 예제
 데이터통신 부호화 (encoding) 부호화 (Encoding) 의개념 정보 Encoder 신호 1 Digital - to - Digital 2 Analog - to - Digital 3 Digital - to - Analog 4 Analog - to - Analog 2 1 Digital-to-Digital Encoding Digital 정보를 Digital
데이터통신 부호화 (encoding) 부호화 (Encoding) 의개념 정보 Encoder 신호 1 Digital - to - Digital 2 Analog - to - Digital 3 Digital - to - Analog 4 Analog - to - Analog 2 1 Digital-to-Digital Encoding Digital 정보를 Digital
Install stm32cubemx and st-link utility
 STM32CubeMX and ST-LINK Utility for STM32 Development 본문서는 ST Microelectronics 의 ARM Cortex-M 시리즈 Microcontroller 개발을위해제공되는 STM32CubeMX 와 STM32 ST-LINK Utility 프로그램의설치과정을설명합니다. 본문서는 Microsoft Windows 7
STM32CubeMX and ST-LINK Utility for STM32 Development 본문서는 ST Microelectronics 의 ARM Cortex-M 시리즈 Microcontroller 개발을위해제공되는 STM32CubeMX 와 STM32 ST-LINK Utility 프로그램의설치과정을설명합니다. 본문서는 Microsoft Windows 7
ISP and CodeVisionAVR C Compiler.hwp
 USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler http://www.avrmall.com/ November 12, 2007 Copyright (c) 2003-2008 All Rights Reserved. USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler
USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler http://www.avrmall.com/ November 12, 2007 Copyright (c) 2003-2008 All Rights Reserved. USBISP V3.0 & P-AVRISP V1.0 with CodeVisionAVR C Compiler
실험 5
 실험. apacitor 및 Inductor 의특성 교류회로 apacitor 의 apacitance 측정 본실험에서는 capacitor를포함하는회로에교류 (A) 전원이연결되어있을때, 정상상태 (steady state) 에서 capacitor의전압과전류의관계를알아본다. apacitance의값이 인 capacitor의전류와전압의관계는다음식과같다. i dv = dt
실험. apacitor 및 Inductor 의특성 교류회로 apacitor 의 apacitance 측정 본실험에서는 capacitor를포함하는회로에교류 (A) 전원이연결되어있을때, 정상상태 (steady state) 에서 capacitor의전압과전류의관계를알아본다. apacitance의값이 인 capacitor의전류와전압의관계는다음식과같다. i dv = dt
고 학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ] 1. 의값은? ( 단, ) [ 점 ] 다항식 이 로인수분해될때, 의값은? ( 단,,
![고 학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ] 1. 의값은? ( 단, ) [ 점 ] 다항식 이 로인수분해될때, 의값은? ( 단,,](/thumbs/97/131116939.jpg "고 학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ] 1. 의값은? ( 단, ) [ 점 ] 다항식 이 로인수분해될때, 의값은? ( 단,,") 고 208학년도 9월고수학 전국연합학력평가영역문제지 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ]. 의값은? ( 단, ) [ 점 ] 2 3 2 3 4 5 4 5 2. 다항식 이 로인수분해될때, 의값은? ( 단,, 는상수이다.) [ 점 ] 4. 좌표평면위의두점 A, B 사이의거리가 일때, 양수 의값은? [ 점 ] 2 3 4 5 2
고 208학년도 9월고수학 전국연합학력평가영역문제지 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ]. 의값은? ( 단, ) [ 점 ] 2 3 2 3 4 5 4 5 2. 다항식 이 로인수분해될때, 의값은? ( 단,, 는상수이다.) [ 점 ] 4. 좌표평면위의두점 A, B 사이의거리가 일때, 양수 의값은? [ 점 ] 2 3 4 5 2