|
|
|
- 지희 기
- 6 years ago
- Views:
Transcription

1 중소기업기술로드맵 Technology Roadmap for SME - 로봇 -
2
3 CONTENTS 전략분야 로봇 1. 개요 1 2. 국내외정책동향 3 3. 산업이슈및동향 시장동향및전망 기술동향및이슈 중소기업시장대응전략 주요기술개발테마 중소기업기술개발테마 35 기술개발테마 인간친화형협동로봇 1. 개요 외부환경분석 기업분석 기술개발현황 연구개발네트워크 기술로드맵기획 85 착용형근력증강웨어러블로봇 1. 개요 외부환경분석 기업분석 기술개발현황 연구개발네트워크 기술로드맵기획 133
4 산업용부상방지및작업지원로봇 1. 개요 외부환경분석 기업분석 기술개발현황 연구개발네트워크 기술로드맵기획 181 물류로봇 1. 개요 외부환경분석 기업분석 202 나. 주요기업기술개발동향 기술개발현황 연구개발네트워크 기술로드맵기획 228 스포츠시뮬레이터로봇 1. 개요 외부환경분석 기업분석 기술개발현황 연구개발네트워크 기술로드맵기획 287 노인과장애인을위한근력보조웨어러블로봇 1. 개요 외부환경분석 기업분석 기술개발현황 연구개발네트워크 기술로드맵기획 328

5 소셜로봇플랫폼및서비스 1. 개요 외부환경분석 기업분석 기술개발현황 연구개발네트워크 기술로드맵기획 383 가전로봇 1. 개요 외부환경분석 기업분석 기술개발현황 연구개발네트워크 기술로드맵기획 429
6
7 로봇 전략분야현황분석
8
9 로봇 로봇 1. 개요 가. 정의 로봇은외부환경을인식하고, 상황을판단하여, 자율적으로동작하는기계로, 로봇산업은 지능형로봇의완성품등제조외에도로봇제품을구성하는부분품, 판매, 서비스까지총칭 나. 범위및분류 (1) 범위 2014년로봇산업실태조사에따르면, 로봇산업특수분류는제조업용로봇, 전문서비스용로봇, 개인서비스용로봇, 로봇부품및부분품, 로봇시스템, 로봇임베디드, 로봇서비스로구분 모니터링센서기술에는수집하려는정보의목적에따라재난감지, 보안, 에너지및환경관리센서기술로분류 전문서비스용로봇은비제조업용로봇으로불특정다수를위한서비스제공및전문화된작업을수행하며, 사람의복지, 특정한시설이나특수목적에유용한서비스를제공하는로봇 개인서비스용로봇은인간의생활범주에서제반서비스를제공하는인간공생형대인지원을목적으로생산되며, 개인의건강, 교육, 가사, 안전, 정보제공등의서비스와밀접한관련이있음 로봇부품및부분품은제조업, 전문서비스, 개인서비스용로봇등을생산하기위해사용되는모든중간생산물 로봇시스템은로봇과기계, 장치등이조합되어필요로하는기능을실현하는집합체 로봇임베디드는로봇의형상은아니나, 로봇의기술이적용되어있는제품 로봇서비스는로봇을활용하여사람에게편리함을주는것을상품으로하여판매하는행위 (2) 분류 로봇은크게제조및비제조용으로나뉘며, 비제조용로봇은개인서비스, 전문서비스로나뉨 제조용로봇의분야는산업현장에서제품생산을목적으로만들어진기계로, 머니퓰레이터로봇플랫폼, 이동용플랫폼, 로봇용제어기, 로봇용센서등으로나뉨 비제조로봇중개인서비스로봇의경우생활편의를목적으로사람을돕기위해만들어진로봇으로, 가사지원, 교육, 엔터테인먼트, 실버케어등의분야로나뉨 1
10 전략분야현황분석 한편, 전문서비스로봇의경우재난구조, 의료등불특정다수를위해특수제작된로봇으로, 필드로봇, 전문청소, 검사및유지보수, 건설및철거, 유통물류, 의료, 구조및보안, 국방등 분야로나뉨 [ 로봇의분류 ] 분류공급망관점세부기술주요제품및기술 제조용로봇 산업각분야의제조현장에서생산과출하를위한작업수행 머니퓰레이터로봇플랫폼이동용플랫폼로봇용제어기로봇용센서 로봇핸드, 감속, 액추에이터 / 모터, 관절, 다축로봇팔, 직교좌표등을갖춘제조로봇 자율주행이가능한이동제어제조로봇 제어보드, 제어 SW 및제어알고리즘, 경로계획, 위치추정, 모션제어 위치및모션센서, 가속도센서, 자이로센서, 초음파센서, 토크센서, 터치센서 가사용로봇 로봇청소기, 주택경비용로봇, 심부름용로봇 인간의생활범주에서제반서비스를제공하는인간공생형대인지원로봇 교육및연구용여가지원용로봇헬스케어로봇 연구용로봇, 교육용로봇, 교보재용로봇등 애완용로봇, 소형휴머노이드로봇등 개인재활훈련용로봇, 헬스케어로봇등 기타개인서비스용로봇 맹인안내로봇, 머리감김로봇등 비제조 개인서비스 불특정다수를위해서비스제공및전문화된작업을수행 사회안전및극한작업로봇 의료로봇 시설청소용로봇, 이동형키오스크로봇등 실내경비용로봇, 화재감시로봇등 복강경수술로봇, 관절수술로봇, 재활훈련용로봇등 전문서비스 사회인프라로봇군사용로봇농림어업용로봇엔터테인먼트용로봇기타전문서비스용로봇 관로작업용로봇, 광업용로봇등 경계감사용로봇, 전투용로봇, 비행정찰로봇등 농업용및축산용로봇, 임업용로봇등 아케이드게임로봇, 연주로봇등 교통정리, 도로청소, 건물내장재공사등 * 출처 : 한국과학기술정보연구원, 중소기업기술로드맵 로봇응용분야. 2016, 한국로봇산업진흥원서비스용로봇활용사례집재구성 2
11 로봇 2. 국내외정책동향 가. 해외정책동향 유럽 유럽의각국가들은로봇산업을차세대핵심전략산업으로선정하고기술개발에집중 프랑스는 2020년 세계 5대서비스로봇산업국 을목표로 2013년 3월세계리더급로봇산업 개발계획 ( 중소기업 로봇설비 투자에 3,300만 유로 지원 계획 ) 을 발표하는 등 로봇 산업에 적극적으로투자중 독일은 하이테크전략 (Industry 4.0) 을발표하고인간과로봇의공동작업체계개발을추진하고있으며, 대표프로젝트로는산업용로봇과 M2M 등의자율제어시스템을연구하는 Autonomik for Industrie 4.0, 생산라인의자동화와통신기술의통합을목표로한파일럿공장 Smart Factory KL 이있음 영국은 2025 년세계로봇시장점유율 10% 를목표로, 기업혁신기술부산하에기술전략위원회를중심으로총 1 억 5 천만파운드를로봇산업에투자할계획 네덜란드는로봇산업육성을목적으로 2014 년 4 월 Smart Industry 를발표 EU 는 2014 년제조 농업 헬스 교통 사회안전등전방위적산업과로봇기술과의융합을통한세계로봇시장선점 강화를목적으로세계최대규모로봇프로그램 (SPARC) 을운영하고, 2014 년부터 2020 년까지총 21 억유로투자발표 SPARC 는로봇산업에대한전략연구아젠다및로드맵을발표하며유럽로봇연구및기술혁신에대한포괄적인정보를제공 원천 핵심기술확보및기술장벽구축을위한지적재산권강화에노력 2020 년까지약 620 억유로수준의로봇시장규모를달성할것으로전망하고있으며, 전세계로봇시장점유율을 42% 까지증가시키는것이목표 미국 2011 년 6 월발표한 첨단제조업파트너십 (Advanced Manufacturing Partnership) 의일환으로 로봇산업육성정책 (National Robotics Initiative) 을추진중 첨단제조업파트너십은산 관 학을결집해제조업분야의고용창출및국제경쟁력을제고하기위한신흥기술투자전략으로안보, 첨단소재, 로봇공학, 제조공정을 5 대중점영역으로선정 로봇산업육성정책프로그램은차세대로보틱스기술개발, 관련시스템과제품의역량및활용가능성제고, 로봇분야커뮤니티의관심을혁신적적용분야로전환등기초연구부터개발 - 제조 - 확산까지전주기를포함 로봇산업육성정책프로그램의 Co-Robot 은차세대로보틱스시스템이다양한위험상황에서안전하게인간과공존할뿐만아니라, 임무의기획과수행시파트너로기능할공생관계수립이필요함을강조 3
12 전략분야현황분석 과거로봇연구와다르게환경모델링, 상황이해, 풍부한자원등에서현격한차이가존재하며, 로봇기술의활용도를높이면서도손쉽게저렴한가격으로이용가능해야함 인구의노령화와문화적다양성의확대는국민의건강, 교육과학습, 개인과공공의안전, 안보등삶과경제전반의개선에기여할필요성을제기 이를위해연구비지원은기초과학부터공동인프라의연구개발까지인간과로봇의상호작용을강조하는다학제적분야를강조 2013 년 첨단제조업파트너십 발표이후, Co-Robot 중심의제조공정혁신 R&D 투자를강화하여, 2014 년 3 천 2 백만달러수준이었던지원규모를 2015 년 5 천만달러로 1.5 배이상확대 법률지원측면에서는미국연방항공국에서 North Dakoda 주의 2/3 에해당하는지역을무타무인항공로봇시험비행자유지역으로지정하여, 해당지역에서는무인항공로봇을타비행체와동일규제로관리하겠다고발표 FCC, irobot 회사에무선잔디깎기용로봇의제조및판매를제한적으로승인 일본후쿠시마원전사태를계기로국방부방위고등연구계획국 (DARPA) 은재난상황에서활용가능한로봇시스템의연구개발촉진을위한로보틱스챌린지를개최 공장이나연구실의간단하고반복적업무혹은인간이정밀하게통제하는제한적분야에서한정적으로사용되었던로봇이, 예측불가능한상황에서스스로작동가능한로봇으로발전하기위한혁신시도 2013 년 6 월소프트웨어기반의가상로봇경쟁, 2013 년 12 월예선을거쳐 2015 년 6 월결승전진행 한국과학기술원 (KAIST) 기계공학과오준호교수팀이개발한휴머노이드로봇휴보 (HUBO) 가 DARPA 로보틱스챌린지 2015 에서최종우승 일본 2014 년 6 월각료회의를통해신성장전략에서로봇을중점분야의하나로선정한이후, 로봇혁명실현회의를설치해 2015 년 1 월 로봇신전략 을발표 저출산 / 고령화에따른사회문제해결및신성장산업육성목적 2020 년까지제조분야에서현재의 2 배 (6 천억엔 1.2 조엔 ), 서비스분야에서현재의 20 배 (6 백억엔 1.2 조엔 ) 확대목표 로봇산업의핵심역량이하드웨어에서소프트웨어 / 인공지능알고리즘으로전환되면서, 제조에서는우위를보이더라도소프트웨어 / 인공지능을활용한사업화에서뒤쳐질것이라는위기감고조 전분야에대한기반확충을위해액션플랜구성 4
13 로봇 [ 분야별액션플랜의주요내용 ] 구분내용 2020 년목표 제조 부품조립, 식품가공등노동집약적제조업중심으로로봇도입추진 로봇화가지연되고있는준비공정등에로봇을도입하는한편, IT 활용을통해로봇자체고도화도모 로봇업체-사용자사이를연결해주는시스템통합업체육성 로봇표준모듈화및공통기반 ( 로봇 os) 을정비 조립과정의로봇화비율향상 : 대기업 25%, 중소기업 10% 차세대로봇활용우수사례 30건추진 상호운용가능한 하드웨어 : 1,000 제품 이상 시스템통합사업관련시장규모확대 서비스 물류, 도 소매업, 음식 숙박업 등 로봇도입 추진 우수사례수집과전국확산을통해지역 서비스업 일손 부족 해소, 생산성 향상을 통한임금상승선순환형성 차세대요소기술개발로접객자동화검토 피킹 (Picking) 및검품에관련된로봇보급률약 30% 향상 도소매, 요식, 숙박업종에서배달이나청소와같은작업을중심으로활용모범사례수집 (100개정도 ) 간호 이동및보행지원, 배설지원, 치매환자 보호, 목욕지원등 5 개분야개발및 실용화, 보급후원 간호로봇의국내시장규모 500억엔으로확대 신규간호방법등의식개혁추진 간호를하거나간호를받을때간호로봇을이용하겠다는의향을현재각각 60%, 65% 에서 80% 로상향 의료 수술지원로봇등의료기기보급 신규의료기기심사신속화 로봇기술을활용한의료기기실용화 100 건 이상지원 ( 15~ 19) 인프라 재해대응 건설 건설현장의노동력절감과작업자동화를통해중장기적인력부족에대응 인프라점검등에로봇을활용해기술자의유지관리효율화및고도화도모 재해조사로봇으로재해상황파악의신속화, 토사재해현장에서무인화시공으로효율성향상 생산성향상및노동력절감위한정보화시공기술보급률 30% 향상 중요 노후인프라 20% 에대한센서, 로봇, 비파괴검사기술활용한점검및보수고효율화도모 토사붕괴, 화산등가혹한재해현장에있어서도인간과비교해손색없는시공효율시현 5
14 전략분야현황분석 농림수산업 식품산업 트랙터등농업기계에 GPS 자동주행시스템등을활용함으로써작업자동화실행, 대규모 저비용생산실현 지원로봇이나제초로봇을활용하여인력에의존하는중노동을기계화 / 자동화 고도환경제어시스템및농작물상태판별로봇등의보급으로고품질화실현 2020 년까지자동주행트랙터현장구현 실현 신규로봇 20 기종이상도입 * 출처 : 과학기술 & ICT 정책 기술동향분석 (KISTEP, 2016), 한 중 일로봇산업및정책동향 ( 정보통신기술진흥센터, 2017) 재구성 로봇혁명실현회의후속조치로 로봇혁명Initative협의회 를조직하고로봇에의한새로운산업혁명추진하였는데, 이는자동차, 기계, 화학, 철강등 200여개의전방위적산업단체가참여하여로봇도입영역및활용지원을위해논의 2015년 6월내각부는 과학기술이노베이션종합전략 2015 발표하여, 로봇, lot( 사물인터넷 ) 등강화하기로하였으며, 이를차세대인프라구축, 2020년도쿄올림픽등에활용하기로발표 2015년 9월경제산업성과로봇업체는공동으로산업용로봇핵심부품표준화착수하였으며, 2016년에는정부에서인공지능, IoT( 사물인터넷 ) 등로봇에활용되는핵심기술개발을위해부처간의협의체를구성하고, 간호로봇개발지원을위한거점 10곳설치등에예산을집중적으로투입할예정임을발표 중국 2014년 6월시진핑주석이 세계최대로봇강국으로의도약 목표를발표하였으며, 13차경제개발 5개년계획, 중국로봇산업연맹설립 ( 13.4월), 로봇산업단지 ( 칭다오, 광저우, 충칭시 ) 운영등을통해年 5만대로봇생산계획 2014년 11월공업정보화부에서 13차경제개발 5개년계획 (2016~2020) 에로봇산업을포함하였으며, 이를통해 2020년까지산업용로봇산업구조를완비, 세계로봇시장점유율 45% 달성, 노동자 1만명당로봇사용대수를 100대이상증가, 타산업과로봇기술융합을통해 200조원신시장창출목표임을발표 2015년 5월중국 10대산업 upgrade계획인 중국제조 2025 계획에서로봇을중점분야육성산업으로발표하였는데, 특히 5대프로젝트중하나로 Smart Manufacturing 프로젝트를통해주요산업의 Smart Factory와디지털작업현장건설을추진할것을발표 2015년 9월발표한중국제조 2025 주요기술로드맵에서는로봇기술이융합된 CNC선반, 차세대 ICT산업, 의료기기등수요와목표, 육성분야, 지원내용등을포함한기술로드맵을제시함 자국로봇산업경쟁력강화를지원하는이유는중국의제조경쟁력이점진적으로하락해 2020년미국에제조경쟁력 1위를내어줄것으로예측되어로봇을이용한자동화기술을도입해야만하는상황이기때문 6
15 로봇 2015년 7월중국국무원에서인터넷플러스적극추진에관한행동지도의견을발표하여경제혁신과사회발전을추동할수있는 11개중점분야와관련계획설정 인터넷 + 협동제조중점분야에서는생산과정중에클라우드컴퓨팅, 사물인터넷, 산업용로봇기술의적극적활용과생산장비의스마트화를추진 인터넷 + 인공지능중점분야에서는인터넷플랫폼에기반한인공지능서비스를위해로봇분야의대중화및핵심기술혁신을가속화 2016 년 3 월중국정부는제조경쟁력강화및로봇산업육성을목적으로, 로봇산업 발전계획 을발표 [ 로봇산업발전계획의 5 대주요임무와 6 대정책조치 ] 5 대주요임무계획실현을위한 6 대정책조치 산업의상징이될수있는제품개발시도 ( 스마트제조, 스마트물류외특수작업에서의 니즈에도부응 ) 자금과자원의집약및지역산업에대한정책적 지도를강화하여로봇산업체인과생산요소의집약화 시도 고정밀감속기, 고성능구동기, 제어장치, 센서와같은 로봇핵심부품의생산기술발전시도 재정지원을강화하여국가프로젝트에의한 과학기술지원사업에나서, 로봇및핵심부품의 연구개발과산업화지원 산업기초 능력 및 중심적 기술 연구, 업계 기준 구축을강화 ( 로봇이노베이션센터및국가로봇평가측정센터 설립 ) 자금조달루트를확충하고금융기관의로봇산업체인 이해도를높여우량로봇기업에대한대출과 M&A 지원 로봇응용모델케이스를추진하고제조업의중점적 분야에서모델프로젝트를실시하는것외에재해 지원, 의료및재활등의분야로도확대 양호한시장환경을정비해산업용로봇의산업 규범을제정하고각방면의자원을우량기업에집중 업계선도기업을육성하고인터넷기업과전통적 로봇제조기업간의융합시도 인재육성을조직적으로실시해대학과로봇관련 학과를개설하며, 취업지원과관련된직업훈련에 로봇을포함 - 국제교류와제휴를확대해정부와업계단체, 기업등 여러루트를통해기술, 업계기준, 지적재산권, 측정 / 인증등의분야에서국제교류를추진 * 출처 : 한 중 일로봇산업및정책동향 ( 정보통신기술진흥센터, 2017) 7
16 전략분야현황분석 나. 국내정책동향 4 차산업혁명을주도하기위해로봇산업육성추진 2016 년관계부처합동으로 로봇산업발전방안 을발표, 5 대유망품목을선정하는등시장 변화흐름에따른정책적대응방안을제시 5 대유망품목 : 첨단제조 ( 협동 + 양팔 ) 로봇, 의료재활로봇, 무인이송로봇, 소셜로봇, 안전로봇 2017 년 10 월에는관계부처합동으로 2017 년지능형로봇실행계획 을발표 [ 실행계획세부내용 ] 분류 주제 내용 스마트공장확산 서비스 수요증가 등에 따라 성장 가능성이 크고, 기본적 내수기반이갖춰진유망품목중심기술개발추진 로봇 R&D 종합역량제고 재난안전로봇시스템개발및실증시설구축본격추진 (2016.7~) 신시장창출을위한특수제조환경용제조로봇시스템개발추진 2016 년주요성과분석 로봇수요전산업확대 개방형로봇산업생태계조성 범국가적로봇융합네트워크구축 의료 재활로봇, 헬스케어로봇실증을위한인프라구축추진 미국국방부와재난대응로봇공동연구착수 (2016~2019년, 총 36억원 ) 의료, 농업, 안전, 해양등융합로봇기술개발 중소제조로봇 240억원, 로봇부품 82억원, 교구용로봇 72억원등 16년총 737억원의대규모신규매출발생 국내중소 중견제조기업의제조자동화에필요한제조업용로봇을지원해생산성향상, 불량률감소등성과 한국로봇산업진흥원과한 아세안센터간협력 MOU 체결하여아세안시장개척지원 로보월드기간로봇기술사업화경진대회개최등로봇비즈니스아이디어및마케팅전략발굴 로봇제품에대한단계적인인증제도마련및국내외표준화활동의참여 지원확대 석박사급고급인력및중소기업실무형전문인력양성 로봇융합포럼 을개편하여, 정책과제 비즈니스모델발굴및제도개선중심의 융합얼라이언스 추진 잠재력이있는창업초기기업을발굴하여전문가멘토링, 비즈니스모델개발, 아이템검증 개발, 시장진입등지원 (2016년 9월 ) 8
17 로봇 분류주제내용 2017 년도추진방향 2017 년실행계획 유망품목중심핵심기술확보및경쟁력강화지원 신규수요창출및해외시장진출기반확대 융합분야전문인력양성과융합얼라이언스추진등협력생태계조성 로봇 R&D 종합역량제고 로봇수요전산업확대 개방형로봇산업생태계조성 범국가적로봇융합네트워크구축 스마트공장확산, 서비스수요증가등에따라미래성장가능성이큰유망품목중심으로집중적인기술개발 상용화추진 범부처수요연계기술개발및풀뿌리연구지원등수요자중심 R&D 지원으로기술개발역량제고및성과향상 스마트공장보급 확산사업과연계하여제조로봇신규수요를창출하고, 로봇활용스마트공장고도화의선순환구조형성 유망서비스로봇품목을중심으로로봇적용시범프로젝트를추진하여신뢰성확보하고초기로봇수요를창출 수출유망국대상수출상담회개최및기술선도국미국 EU 등과 R&D 기술교류등글로벌협력강화 휴머노이드로봇등선도기술분야, 인공지능 ICT 등융합분야의지속적연구환경조성을통해고급전문인력양성필요 타산업 타분야의로봇수요발굴및수급기관간협업활성화를위한로봇융합얼라이언스추진 로봇 R&D 성과향상을위한수요자중심의기술개발추진 유망로봇융합제품및산업원천 부품기술개발 로봇기술을他산업부문에적용한융합형로봇기술제품개발 로봇사업화지원사업의전략적활용을통해신규수요창출 기술선도국및수출유망국에대한전략적국제협력추진 수요기업 他산업주력기업의로봇분야투자확대촉진 로봇분야 KS인증및시험 표준국제화추진 석박사급고급인력및중소기업실무형전문인력양성추진 타산업 타분야로봇수요발굴및수급기관간협업촉진을위한로봇융합얼라이언스추진 지역거점지원기관의역할강화를통해지역로봇산업기반확대 * 출처 : 2017 년지능형로봇실행계획 ( 관계부처합동, 2017) 범부처협력로봇 R&D 실시 의료 재활, 물류, 안전, 해양, 농업, 엔터테인먼트등분야의로봇으로보건복지부, 국토교통부, 해양수산부, 농림축산식품부, 문화체육부등과협력해서진행 2017 년 9 월산업통상자원부에서로봇산업기술로드맵발표 국내로봇업계의다양한인력들이대규모로참여하여로봇비즈니스와기술개발에대한전망예측 향후로봇사업전개와산업부의로봇 R&D 및산업정책방향설정에참고자료로사용 9
18 전략분야현황분석 로봇핵심부품활성화정책수립및진행 국내에서설계 제조되는제조용로봇완제품은주요핵심부품을거의대부분수입하는실정 국내기업의가격경쟁력상승을위해하드웨어핵심부품의국산화를꾸준하게추진 로봇산업정책주요성과 R&D 종합역량제고 13대산업엔진일환으로메가트렌드와부합및향후고성장이전망되는 국민안전 건강로봇프로젝트 실시 급속한고령화사회에대비하여조기상용화가가능한병원물류로봇기술개발우선추진 ( 14.11~) 인간이접근하기힘든극한재난상황에활용하기위한재난대응로봇기술개발및실증기반조성추진 - 국민안전로봇프로젝트예비타당성조사진행 ( 14.5 ) 기존제조분야뿐아니라, 부품 SW/ 서비스분야에서도로봇 R&D 사업화성과발생 확대 - 현대중공업 모듈형슬림형수직다관절로봇 ( 09 14) 14년 312억원매출 - 로보티즈 사용자창작로봇솔루션 ( 09 14) 14년 84억원매출 - 한화, 굴삭중장비용탈부착가능조작로봇 ( 11 14) 동남아수출준비중 전방위적로봇수요기술적용확대에기여 의료, 농업등다양한산업분야와융합한로봇기술개발 - 의료분야에서는영상중재최소침습수술로봇, 혈관치료용마이크로로봇, 상하지근골격계수술로봇시스템등의료로봇기술개발 - 농업분야에서는농작업의자동화로봇기술개발, 로보틱농기계부품및센서등농업용로봇기술개발 - 친환경벼농사용제초로봇기술확보, 토양계측을위한농업용센서개발, 하이브리드동력적용승용관리기개발 ( 특허 3건, 기술이전 2건 ) 로봇보급측면에서, 공공분야로봇활용 효과성검증및뿌리산업, 교육분야등에서지속적인사업화성공및로봇시장확대성과 - 자율비행로봇 ( 리모아이 ), 軍대상무인기공급사업수주 (400억원규모 ) - 14년부처주도형로봇보급사업은자율비행로봇포함, 총 11개과제추진 11 14년지원된로봇보급사업으로, 14년전체신규매출은 468억원발생하였으며, 분야별로중소제조로봇 178억원, 교구용로봇 144억원등이시현되고로봇부품역시액추에이터, 센서모듈등대기업연계매출실현 - 로보트로, 스마트액추에이터 900대 (5억원 )-삼성( 베트남공장 ) / 센서텍, 로봇청소기용초음파센서모듈 7만개 (1.8억원 )-LG전자납품 10
19 로봇 세계협력분야에서는美 DARPA, 中광동성, 말레이시아 MARA 등해외로봇유관기관과의협력네트워크강화되어기술교류지원 - 美방위고등연구계획국 (DARPA) 주관국제재난대응로봇경진대회 (Robotics Challenge) 에국내팀 (KAIST, 로보티즈, 서울대 ) 참가지원 - 한국로봇산업협회와中광동성로봇관련 3개협회간 MOU* 체결 ( 15.1월) 을통해양국간로봇분야비즈니스협력기반확보 - 말레이시아토착민지원청 (MARA), 카타르과학관등과의로봇분야인적교류를통한 B2G 시장개척지원 개방형로봇산업생태계조성 사업지원측면에서, 로보월드기간로봇기술사업화경진대회개최하였으며, 로봇전용부품 ( 서보모터 ) 의다양한비즈니스모델발굴을위해 멀티미션 ( 다기능 ) 챌린지대회 개최 ( 오디오 감성로봇, 애완로봇 청소로봇등 ) - 로보월드 2014( ) : 9개국 126개사 (342부스) 참여, 2만8,943명관람 인프라구축측면에서, 인증절차의명료화를위해로봇품질인증국제화및대상품목확대추진 - 한국로봇산업진흥원 ( 로봇품질인증기관 ) 의국제공인시험기관 (KOLAS) 인정획득 ( 14.3) 및교육보조로봇인증 KS 제정 ( 14.12) - 품질인증대상품목 : 청소로봇 ( 09) 교육용로봇 ( 11) 교육보조로봇 ( 14) 인력양성측면에서, 多기술영역업무수행및다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형로봇전문인력양성 - 창의융합석사과정 (33명), 로봇 서비스융합SW 오픈아카데미 (85명) 등 어린이대상교육용로봇을활용한창의교육확대 ( 14년 4,430명 ) - 아동복지시설및농어촌지역, 인천아시안게임연계글로벌로봇캠프등 범국가적로봇융합네트워크구축 로봇융합포럼및로봇연구기관협의체구성운영하여, 2009년출범함로봇융합포럼을수요처, 마케팅전문가등이참여하는 Open 포럼방식으로전환하여인적네트워크구축지원 ( 14년총 4회개최 ) - (1차) 제조업혁신, (2차) 고령화사회대응, (3차) 지역산업경쟁력, (4차) 국방로봇 로봇연구지원기관협의체 를통해로봇머니퓰레이션기술개발과제 (3개연구기관공동, 14.8 ) 수행등지속적으로기술교류 ( 14년정례회의 4회, 워크숍 1회개최 ) 지역로봇산업지원기관협의회참여기관수확대 (9 12개) 및지역별특성에맞춘기업지원을통해지역기반로봇산업경쟁력강화 - 경북 ( 로봇융합연구원 -수중 사회안전 ), 전북 ( 전북테크노파크 -농기계 ), 강원 ( 강원정보문화진흥원 -문화 콘텐츠 ) 등업무협력약정 (MOU) 체결 ( 14.12) - 광주 ( 반려견용완구로봇사업화 ), 인천 부천 ( 아시안게임연계 Robot-Van( 이동형플랫폼 ) 구축지원, 9.7억원매출계약체결 ), 부산 ( 로봇캡스톤챌린지대회 ) 등 11
20 전략분야현황분석 [ 국내로봇산업정책변화 ] 연도정책명주요추진전략내용 킬러애플리케이션창출을위한기술개발 2005 년 지능형로봇산업비전및발전전략 역량강화 산업선순환 고리 형성을 위한 인프라 조성 시너지효과제고를위한혁신클러스터 구축 산업활성화를위한체제정비 산업화촉진을위한초기시장창출 로봇제품의신뢰성제고를위한표준 인증체계확립 2009 년 제 1 차지능형로봇기본계획 5개년 R&D 투자방향설정 3대기술군별차별화된 R&D 전략으로기술경쟁력제고 스타프로젝트추진 조기상용화촉진을위한수요자중심의시범사업강화 대규모로봇수요공간조성 세계최고권위의경진대회육성 법 제도개선및로봇윤리헌장제정 민간자금을 활용한로봇산업 투자재원 확보 산업활성화를위한지원시스템강화 로봇산업역량 결집을 위한 협력체계 구축 R&D 역량결집및산업진흥전담체계 구축 국내외시장확대를위한마케팅지원 고용연계형다차원적전문인력양성 광역경제권별로봇지원센터특화육성및 연계강화 수요자와공급자가함께 참여하는 집단 협업공간구축 2014 년 제 2 차지능형로봇기본계획 글로벌선도형대형 R&D 과제추진 다양한사회적니즈반영 부품 (SW) 서비스분야 R&D 강화 로봇기술의타제조 서비스분야확산 로봇보급사업의전략적활용 글로벌협력강화 수요기업 타산업 주력기업 투자 확대 유도 인증 표준국제화 중소기업중심로봇전문인력양성 타산업 타분야와의협업확대 로봇산업협력체계내실화 지역거점기관역할재정립 * 출처 : 한 중 일로봇산업및정책동향 ( 정보통신기술진흥센터, 2017) 12
21 로봇 3. 산업이슈및동향 가. 산업이슈 세계로봇산업이슈 노동인력, 생산환경의변화및제조업의부활로인해로봇수요증가 전세계적으로인건비증가와고령화에따른노동인력의감소로로봇에의한노동인력대체와생산성향상이절실함 ( 한국 65세이상인구비율은 1970년 3.1% 에서 2030년 24.3% 로증가예상 ) 중국등신흥국의임금인상폭의생산성증가율초과에따른해외생산이갖는비용효과감소와맞물려미국의제조업이살아나고있고전통제조업체들이생산성향상및비용절감을위해로봇에대한수요가증가하고있음 세계의공장역할을하고있는중국의 1인당생산성이낮은이유를로봇밀도가낮기때문이라는분석이있음 - 낮은로봇밀도를개선하려는중국의노력에의해중국의로봇시장이급성장하고있음 일본은전통적인제조용로봇강국으로자리잡고있어자국내내수시장의부진에도불구하고해외시장을크게확보하고있기때문에일본의로봇생산액은지속적으로성장하고있음 복잡한조립작업이나유형화되지않은공정의자동화수요대응필요 용접및도장공정의경우위치정밀도가중요하였으나, 부품핸들링및조립분야에서는위치정밀도만으로는충분하지않고힘 / 모멘트제어기능과쉬운티칭기능등이요구됨 산업용로봇을적용한기존생산라인은대부분컨베이어벨트또는팔레트시스템을도입한경우로조립및검사등을하나의셀단위로수행하는셀공정의자동화요구에대응이필요 수작업라인을포함하여유형화, 체계화되지않은공정에인간과로봇이작업공간을공유하면서협동작업수행을통해공정유연성을확대필요 글로벌제조기업들의협동로봇도입을통한자동화영역확대 BMW는의장공정작업에협동로봇 UR10을도입하여안전펜스없이작업자와협업할수있도록적용하였으며, 품질검사용공정에도확대적용예정 GE는 LED 조명조립공정에협동로봇 Saywer를도입하여기존공정변경없이설치하여운영중으로계절별생산물량변동이큰플랜트를대상으로확대도입추진 FANUC은사출성형기를제조하는공정에무거운물건을운반할수있는자사의 CR-35iA를도입하여볼스크류에베어링부품을압입하는작업을여성작업자가혼자수행 P&G는향수샘플제품포장공정에협동로봇 UR5를도입하여컨베이어픽앤플레이스 (Pick & Place) 작업에활용중으로공정변화가많은다품종소량생산공정에확대적용 13
22 전략분야현황분석 가와사키중공업의 duaro 양팔협동로봇은자동차와전자산업용으로개발했지만, 편의점용주먹밥 포장작업에도입되어활용되는등다양한분야에서활용됨 휴머노이드로봇의적용범위확대및플랫폼비즈니스모델로진화가능성 인간과감성소통이가능하며완성도높은동작이가능하면서가격경쟁력을갖춘로봇등장 소프트뱅크사의 페퍼 (Pepper) 는스마트폰생태계와같이원가이하로로봇을공급하고콘텐츠로수익을발생시키는플랫폼비즈니스모델로판매되고있으며현재운영되는앱은 200 여개이며, 타이머, 춤시연, 거짓말탐지, 운동프로그램, 피아노연주, 야구이야기, 영어배우기등엔터테인먼트와교육분야의앱이다수제공됨 - 향후플랫폼의시장을견인할킬러어플리케이션의등장가능성이보임 - 현재는일본에서만판매되고있으며중국어를탑재하여중국시장에출시예정 소프트뱅크사의 페퍼 (Pepper) 는 이모셔널엔진 (Emotional Engine) 을탑재한최초의감정인식로봇으로평가되고있으며, 사람의감정을인식하고이를반영해행동하며접객및제품홍보를할수있으며기존에감정을인식해스스로행동양식을만들며클라우드인공지능에기반한집단지성을이용하여복잡한감정을더빨리학습하고이에더정교하게반응함 고령화시대를맞이하여노인의건강을관리하고생활활동을지원하기위한실버케어관련산업이성장할전망이며이에따라케어로봇산업규모도확장할것으로예측됨 로봇의엑츄에이터기술의발달은소형화가가능하여 20cm이하의스마트폰형태의로봇으로휴대가가능한수준으로발전 로봇하드웨어에스마트폰은네트워크기반인공지능을부여하여저렴한장난감수준의로봇이라도인간과상호작용이가능한수준의커뮤니케이션능력을부여 ICT 기술의발달은온오프믹스형태의교육콘텐츠시장이활성화될전망이며, 가상현실세계의구현, 아바타에의한간접체험등의기능을가진개념의교육로봇이등장할것임 교육용로봇시장은 O2O(Online-to-Offline) 시장의확장으로향후가상현실 (VR) 기술과결합을통해가상체험시장으로성장가능. 나아가로봇과사물을가상체험기술과융합한증강현실시장은더욱큰성장가능성이있음 로봇기술의발전이진행되면서사람과함께작동하는로봇들이개발되고있으며, 최근에는사람이착용하는웨어러블로봇이발전중 1990년대초반부터물리적부담이가해지는작업을보조하기위한수단으로연구되었음 최근에는근력이약해지거나보행이불편한장애인들을위한로봇이연구되고있음 - 착용형로봇, 로봇의족, 로봇의수등 14
23 로봇 우리나라는제조업노동자 1만명당적용된제조로봇의대수로계산하는 로봇밀도 가 531로전세계 1위 2016년국제로봇연맹 (IFR) 의보고서에의하면한국이 531로 1위, 싱가포르가 398로 2위, 일본이 305로 3위를차지 한국의로봇밀도는 2011년부터일본을제치기시작해 5년연속세계 1위 산업용로봇의시장규모는중국에이은세계 2위 전기전자산업과자동차산업에적용된제조로봇이증가했기때문 전기전자산업에서주로사용하는직교좌표로봇은한국로봇시장의 54%( 수량기준 ) 를차지하며, 이규모는세계시장규모의 1/3에해당 국내시장에서는전문서비스로봇보다개인서비스로봇이약 2배이상큰규모를보이고있으며, 이는개인서비스로봇이전문서비스로봇보다약 2배이상큰세계시장과는반대 국내서비스로봇시장의대부분은가정용청소로봇 국내서비스로봇기업은로보티즈, 유진로봇, 로보케어, 퓨처로봇이대표적 15
24 전략분야현황분석 나. 핵심플레이어동향 해외업체동향 이스라엘의리워크로보틱스 (Rewalk Robotics) 는하지재활용로봇 리워크 (ReWalk) 를개발 상용화된하지재활로봇의대표격인제품으로, 2012년런던마라톤에서하반신마비환자가리워크를착용하고 16일만에완주에성공함 끊임없는제품개선으로기능을업그레이드하고있으며현재 ' 리워크 (Rewalk Rehabilitation 2.0)' 와 ' 리워크퍼스널 6.0(ReWalk Personal 6.0)' 두가지모델이출시됨 - 리워크 2.0은기관용 ( 기관과개인모두사용가능 ) 이며리워크퍼스널 6.0은개인용 - 리워크 2.0은배낭처럼등에메는배터리팩이존재하나, 리워크퍼스널 6.0은벨트처럼허리에차는주머니형태로변경됨 일본사이버다인은재활치료용, 산업용등여러분야에서다양한부위에착용할수있는 HAL을개발 몸을움직일때뇌에서근육으로전송되는생체전위신호를읽어착용자의동작을지원하는방식 산업현장에서쓰이는작업지원용모델은최근공항과은행등다양한곳에도입됨 HAL은허리에차는형태로무거운물건을들어올릴때허리에가해지는부담을줄여작업환경을개선하고작업자의부상을방지함 여성이나고령자도착용할수있도록 3kg의경량모델로제작되었으며, 45분충전으로최대 3시간사용가능 irobot은로봇청소기뿐만아니라바닥청소로봇, 수영장청소로봇, 교육용로봇, 병원용등다양한분야에서로봇을사용하는데일조하고있는 irobot은인공지능 (AI) 을통해제품을계속진화시키고있음 현재글로벌로봇청소기시장에서약 70% 의높은점유율을보이고있는 irobot은스마트홈통합과함께클라우드기반스마트폰앱으로서비스를제공하며, 소비자들의편의성과높은흡입력으로로봇청소기의단점을보완함 irobot은스마트홈이향후중요한트렌드로자리잡을것이라예상하며간편하고, 자동화, 개인화된 3세대스마트홈에초점을맞춰제품개발및출시에주력할것으로예상됨 16
25 로봇 [ irobot 로봇청소기 Roomba 제품중일부모델 ] 일본소프트뱅크는프랑스의로봇업체인알데바란로보틱스를인수한이후휴머노이드형 로봇인페퍼 (Pepper) 를출시 샤프와통신업체인 NTT 도다양한소형소셜로봇제품의개발과출시에도역량을집중하고있음 국내업체동향 국내 SG 로보틱스 (SG Robotics) 는하지완전마비장애인을위한워크온수트 (WalkON Suit) 를발표 하지완전마비장애인의성공적인동작보조를위하여구동토크및보행속도, 착용성, 보행안전성, 시스템안정성, 실용성등의요구조건을모두고려하여개발되었으며, 임상훈련을통해성능검증 앉기 / 서기및평지보행, 곡선보행, 불균일지형보행, 언덕오르기 / 내리기, 계단오르기 / 내리기등의다양한동작들이모두가능하도록동작생성알고리즘을구현 스위스에서개최된 2016년도 Cybathlon 장애인로봇올림픽의 Powered Exoskeleton Race 종목에서최종 3위입상 방위사업청은국방과학연구소, LIG넥스원과함께 복합임무용착용형근력증강로봇 개발에착수 복합임무용착용형근력증강로봇은다양한과제로이루어져있음 - 고기동하지근력증강로봇의고속동기화제어기술, 고하중상 하지근력증강로봇의통합운용제어기술, 착용형근력증강로봇용고밀도전원기술, 소방대원근력지원관련장치기술 실용화를위한기술개발에중점을두고개발기간에운용환경에적합한각종신뢰성실험을수행 착용자안전설계및성능평가에대한표준화등으로운용성향상과신뢰성있는체계를개발 현대자동차는 전기식 (EWR) 근력증강 로봇을, 현대로템은 유압식 (HWR) 근력증강 로봇을 개발 전기식로봇은자동차조립에쓰일수있고, 유압식로봇은전동차문이나에어컨등 80kg의 물체를들고시속 3km로움직일수있음 17
26 전략분야현황분석 에프알티는한국생산기술연구원에서개발한로봇 (HYPER) 기술을바탕으로유압식웨어러블원천기술을활용하여재난, 화재및구난현장에서운용자의임무수행을위한근력지원웨어러블로봇을개발 웨어러블로봇착용시무게를 30% 체감할수있으며시간당 6km의속도로이동가능 민수용과군수용두분야에서운용가능하며, 민수용은각종산업현장에서운반및현장작업보조용으로이용되고군수용은증대되는병사의전투부하를극복하고지속적인작전과빠른기동을지원 재난현장에서는구난 구조작업시소방관들의근력을증강해화재진압및인명구조의효율을높임 차량이동이불가능한재난환경에서무거운중량물이나인명의운반작업을도와줘작업보조및인명구조용으로활용가능 로보스타는한국기계연구원과공동개발한무인생산로봇시스템및양팔로봇상용화에 성공하였고, 이시스템은직교로봇, 6 축수직다관절로봇, 병렬로봇, 양팔로봇등제조공정에 필요한모든로봇을하나로엮어부품의공급 조립및최종제품검사까지수행가능 헥사시스템즈는산업지원기기및군사용근력증강로봇을개발판매 군사작전현장및산업현장적용을목적으로개발되었으며착용자상지 하지외부에외골격형태로 부착하여상지 하지근력증강을위한외골격로봇시스템을보유 뉴로메카는산업용필드버스를기반으로한임베디드컨트롤러분야전문업체이며이전보다 향상된산업용협동로봇 Indy7 을출시함 SK 텔레콤은스마트교육용로봇알버트와알버트의확장모델인누리아띠를상용화하였으며, 대화기반의상호작용과음악재생, 스마트홈제어등의기능을제공하는스마트스피커인 누구를출시하여성공적인판매량을기록하고있음 KT 와아이리버는스마트교육용로봇인키봇 (Kibot) 을공동개발하여국내에서성공적으로 상용화했을뿐아니라사우디아라비아의이동통신사인모바일리와 220 만달러규모의수출 계약을체결 LG는스마트홈게이트웨이역할을수행하는허브 (Hub) 로봇을 CES 2017 전시회에소개함. 허브는미국의지보 (Jibo) 와유사한외형과구동부를보유한소셜로봇으로스마트홈제어외에대화기반상호작용, 음악재생, 일정관리등비서기능도제공함. 미국출시용허브는아마존의알렉사 (Alexa) 를기반으로음성기반서비스를제공 18
27 로봇 한국전자인증은미국현지출자회사인에이아이브레인과인공지능전문기업인보나비전은영어교육을목적으로한친구로봇인타이키 (TYCHE) 를공동개발 캠브리지영어 ( 초급단계 ) 90% 를응답하는수준의획기적인인공지능로봇으로보고듣고말도하고놀면서아이들스스로지능계발을하도록돕는스마트폰로봇 아이피엘은 2016년음성인식을통해소통하며다양한기능을제공할수있는소셜로봇인아이지니 (ijini) 를개발하고, 2016년하반기에중국과 160억원규모의공급계약을체결하는등국내소셜로봇시장을견인하고있음 스케줄, 알람설정등의기능을제공하는개인비서역할, 홈모니터링과순찰등을수행하는경비원역할, 함께게임을하거나춤추고노래하는엔터테이너역할, 집안의가전을제어해주는스마트홈허브역할, 간단한대화를하며인간과공감하는커뮤니케이터의역할등다양함 유진로봇은한국전자통신연구원, 을지대병원과협업하여병원, 요양원등에사용될수있는 고하중, 저하중의물류로봇을개발했으며, 동시에국내외판매처로의판매를적극적으로 추진하여좋은평가를받고있음 19
28 전략분야현황분석 4. 시장동향및전망 가. 세계시장 세계로봇시장규모는 2016 년 310 억 4,000 만달러수준에서연평균 43.3% 씩증가하여 2021 년에는 1,877 억달러수준에도달할전망 [ 로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 합계 31,040 39,800 59,140 85, , , * 출처 : Size of the global market for industrial and non-industrial robots from 2016 to 2022(Statista, 2017) 세계로봇시장규모는노동비용의대체, 고령화에대한대응, 자국산업경쟁력제고, 국방력강화등을위한각국의적극적활용정책으로높은성장세를유지할전망 전체로봇시장에서제조업용로봇이 2/3에달하나이비율은점차감소될것으로추정되며빈자리를전문서비스용로봇이차지하게될것으로예상됨 특히 IFR(International Federation of Robotics) 의자료에따르면의료, 필드, 국방등목적에특화된분야에이어가장큰시장이형성되어있는분야가물류로봇분야로향후성장가능성높을것으로예상 개인서비스용로봇시장은교육가사도우미로봇, 육아돌봄로봇, 스마트홈서비스로봇 SW, 라이프케어로봇시장등의수요증가에따라지속확대될전망이며, 향후가사지원로봇시장규모가비중점차확대추세 전문서비스용로봇의경우기술적진보에의해뒷받침된사회적과제, 군사적요구사항및비즈니스요구로인해군사, 의료분야뿐아니라건설및농업산업분야등다양한응용분야에서의시장확대가기대되어급속한시장확대전망 미국 미국은전통적으로산업용로봇이시장수요의대부분을차지하고있었으나, 2006년이후서비스로봇시장이급성장하면서산업용로봇시장을추월하고있는중 전문서비스분야의로봇이건설, 물류, 원자력발전, 우주및심해탐사등다양한분야에활용되며특히의료용로봇이시장을주도하였으나, 일반인들이사용할수있도록디자인된서비스용로봇인바닥청소, 가정용경비시스템, 장난감교육, 장애인보조분야에서도수요확대예상 2011년오바마행정부는 첨단제조업육성정책 의일환으로로봇산업육성정책을추진중에있어차세대로봇개발및보급확대를통해새로운시장과일자리창출을통해미국의글로벌경쟁력을유지, 발전목표 20
29 로봇 특히, 인간과협업을극대화시킬수있는차세대로봇모델인 Co-Robot 핵심개발에 7000 만 달러를투자하여제조업, 항공우주, 보건 / 의료, 식품등에이용 일본 일본은로봇관련핵심부품군과서비스로봇시장에높은경쟁력을보유하고있으며, 서브모터, 액추에이터, 정밀기어박스, 감속기등과같은핵심부품군에서높은경쟁력을보유 자동차 ( 도요타 ) 와 IT하드웨어 ( 소프트뱅크 ) 기업들이휴머노이드로봇을활용, 서비스로봇시장에적극진출중으로향후관련부문의성장기대 인구구조변화 ( 노령화 ) 에따른노인을대상으로하는의료간호서비스수요증가로향후관련로봇수요가지속증가할것으로예상일본휴머노이드로봇은도요타의아시모, 소프트뱅크의페퍼가대표적임 일본정부는 2020년까지자국로봇시장규모를총 2조 4000억엔시장으로확대하는것을목표로로봇산업을육성시키고자하며 ( 제조 2배, 서비스 20배성장목표임 ), 로봇혁명실현회의를총리직속기구로설치하고로봇신전략 5개년계획을 2014년발표하는등정부차원에서의전폭적인지원을실시 중국 중국은글로벌 1위내수시장을보유하여적극적인정부지원을통한산업발전도모하고있음. 중국산업로봇시장은이미 2013년미국, 일본을제치고글로벌 1위로등극했으며, 성장속도또한가장빠른로봇시장으로부상중에있어 IFR에따르면 2017년산업용로봇판매량이 10만대에달할것으로예상 그러나중국로봇시장은이미글로벌 TOP4 ABB( 스위스 ), FANUC( 일본 ), YASKAWA( 일본 ) KUKA( 독일 ) 기업이이미선점한상황이나, 중국기업인 Midea에 KUKA가인수됨에따라향후중국로봇기술이크게발전할것으로전망 한편, 2016년 3월중국공업과정보화부, 국가개발위, 재정부는중국로봇산업육성로드맵인 로봇산업발전규획 을공동발표하여로봇산업내첨단상품을핵심추진분야로확정하고품질, 시장점유율, 주요현지기업의기업경쟁력을재고할방침 중국은 2020년까지산업용로봇판매량을 15만대로늘리고그중 50% 를중국산으로충당하며 3개이상의선두업체육성을목표 21
30 전략분야현황분석 나. 국내시장 로봇분야의국내시장규모는 2016 년 4 조 5,972 억원에서연평균 10.5% 씩증가해 2021 년 7 조 5,618 억원규모에다다를전망 [ 로봇분야의국내시장규모및전망 ] ( 단위 : 억원, %) 구분 CAGR 합계 45,972 50,783 56,098 61,968 68,454 75, * 출처 : 2016 로봇산업실태조사결과보고서 ( 한국로봇산업협회, 2017) 을바탕으로전망치추정 국내로봇실태조사서에따르면, 2014 년국내로봇시장은 2 만 3 천여대의로봇을생산하여 세계에서 4 번째로로봇을생산한국가로나타났으며, 산업용로봇이전체국내생산액의 85%, 서비스용로봇과로봇부품 15% 생산 국제로봇연맹에따르면, 국내산업용로봇의경우자동차, IT를중심으로한제조업부문의생산자동화가빠르게이루어짐에따라 2015년 3만 8,300대로세계 2위를차지한것으로나타났는데, 로봇밀도 ( 근로자 1만명당산업용로봇수 ) 의경우세계 1위이며, 종류별로는주로핸들링작업과머신텐딩분야로봇이대다수로물류이송에주로산업로봇이사용되고있음. 특히, 사물인터넷, 클라우드컴퓨팅등발달로스마트공장이증가할것으로예상되는바, 산업용로봇시장성장은더욱확대될것으로전망 세계다른국가와비교해보면, 국내로봇산업의경우기술력에서는일본, 시장규모에서는중국에밀리고있으며, 스타트업창업또한핵심기술부족으로미흡한수준 부품, 센서등의로봇기반기술의취약으로인해국내로봇시장의성장성이낮은상태이지만기술의발전에따라다양한형태의제품이점차시장을확대할것으로전망 한편, 시장규모가작고산업용로봇에비해단기수익이보장되지않는서비스로봇에대한투자가미진하여정부정책적지원이산업성장견인의주요원인 이에정부는 1990년산업용로봇육성이후 2000년들어서면서지능형로봇에정책적관심을갖기시작, 2008년부터는지능형로봇관련법, 제도적기반등을강화하며본격적인정책을시행중 2014년제2차지능형로봇기본계획을토대로 2016년 1월 6일지능형로봇개발및보급촉진법시행령을개정, 공포하면서본격적인정책지원중인데, 2020년까지로봇산업영역확대를위해총 5,000여억원을투입하고, 로봇연구기반조성을위해 150억원, 그리고, 로봇관련석, 박사급연구인력도 100여명가량양성될예정인바, 국내로봇시장성장예상 - 인간형로봇개발 : 카이스트 휴머노이드로봇연구센터 22
31 로봇 5. 기술동향및이슈 가. 기술동향 청소용로봇의발전속도는최근 10년간아주빠른진보를보이고있음 로봇청소기는 2001년에최초일렉트로룩스에의해출시된후 2003년 LG 전자및몇몇중소기업에의해개발판매되기시작 그후 2000년대중반청소용로봇은유리등물체를감지하고자동충전기능을탑재하기시작 이후카메라로공간을파악하고, 문턱감지, 청소영상녹화등의기능을탑재하기시작한것이 2011년전후임 이제최근청소용로봇은보다다양한기술과결합하여다양한시도를하고있음 최근서울대는인지 (Perception), 판단 (Desision), 행동 (Activity) 분야를청소용로봇에시행한적이있는데, 이때국내청소용로봇이 5세지능의어린이정도의인공지능을가진것으로조사되었음 청소용로봇의발전은이외에도집전체구조의파악, 보다적극적으로환경을분석하는것을시도하고있음 로봇감성표현및 HRI 기술의발전 KAIST는프리미티브기반의제스처생성및감성모델기반의감정표현기술연구 DST로봇은가정용애완서비스로봇을개발 - 15개의모터로구성된관절구동방식의 4족보행로봇으로다양한감정모션과지능적행동패턴수행가능 퓨처로봇은음성과표정을통해기쁨, 만족, 실망등다양한감성표현기능개발 - 감성표현을위해입모양, 허리움직임, 상황에따른부위별 LED 표현, 립싱크표현기능구현 일본오사카대학의이시구로교수팀은인간을닮은안드로이드로봇 Replee 시리즈를개발 일본산업기술총합연구소에서는휴머노이드 HRP 시리즈를개발해사람같은움직임을보이고, 감정을표현하며, 협동작업을수행할수있는연구진행 일본혼다는제스처표현다양화를위한모션튜닝, 감성상태에따른제스처생성, 발화문장에따른제스처매핑을수행할수있는로봇인아시모를개발 미국 Hanson Robotics는자연스러운얼굴표정구현과 HRI 기술을통해인간형얼굴로봇개발 미국 USC는사람의동작을그대로모사하면서사람처럼움직일수있는다자유도로봇시스템 Sparky와얼굴표정과몸동작을통한표현연구를위한 Bandit 로봇플랫폼개발 MIT 미디어랩에서는자기동기부여를통해내부동인을발현하고, 환경정보로부터다양한감정적대응을효과적으로수행할수있는로봇을개발 23
32 전략분야현황분석 최근개발되는소프트웨어러블로봇들은단단한골격구조와기계적관절을가지고있지않아, 기존의외골격형태의웨어러블로봇이가지고있는여러제한사항을극복가능 발목과무릎동작을돕기위한능동형소프트보조장비, 걷는동안일어나는물질대사의에너지효율을증가하는엑소수트, 케이블기반또는공압기반근육구동기를사용한상지및하지재활시스템등 사람의피부와조직처럼부드러움을가진능동소재들의개발이요구됨 스포츠시뮬레이터로봇은실제스포츠움직임에가까운실감구현에집중 스포츠시뮬레이터로봇은단순한움직임과반응력을시뮬레이션하는모션플랫폼에서모션의정밀도를높이기위해다자유도방식과전기식액추에이터기반의모션플랫폼으로확대 스포츠종목별특화된모션플랫폼을적용하거나공통플랫폼을이용하여다양한스포츠종목을커버하기위한기술개발노력 스포츠시뮬레이터로봇모션플랫폼과실감스포츠콘텐츠의접목뿐만아니라몰입환경을극대화하기위한다양한실감효과를재현하기위한장치와신기술도입 다축스포츠시뮬레이터의개발 신 ICT 기술과의접목및다양한산업과의연계 사용자인터랙션강화및맞춤형서비스제공 금속가공용제조로봇들의발전 금속의절삭가공기계들은수동식, NC, CNC 방식을거쳐현재는다축화가진행중 수직다관절로봇이직접절삭가공작업을수행하기시작 24
33 로봇 나. 주요업체별기술개발동향 (1) 해외업체동향 전통적인제조용로봇기업은중국시장진출확대및다각화 FANUC( ) 은제품표준화에노력하여대량생산을통한규모의경제실현 야스카와 ( ) 는섬세한대응이요구되는자동차용에주력 ABB( 스위스 ) 는중국의현지생산화에타사보다일찍착수했고, 새로운개념의제조용로봇개발과다양한응용분야에대한자동화솔루션으로사업범위확대 KUKA( 獨 ) 는 인간과로봇 이라는테마를비전으로한새로운개념의기술개발 (Light Weight Robot, 인간과함께일할수있는로봇 ) 및시장확대에역량집중 글로벌 IT 대기업들의적극적인로봇산업진출 구글 ( 美 ) 은미국과일본의로봇기업 9개사와인공지능전문기업 5개사를인수하며로봇사업본격화 아마존 ( 美 ) 은무인비행로봇인 Octocopter를활용한무인택배발송시스템공개 소프트뱅크 ( ) 는자회사인 Asratec을통해휴머노이드로봇운영체제인 V-sido 등을개발하며로봇사업본격진출 미국 MIT 미디어연구소의 Cynthia Breazeal 박사는소셜로봇 Jibo를크라우드펀딩을통해 371만달러를모금했고, 올해상반기정식판매예정이었지만일정이지연되어 2017년 9월에서야겨우발매됨 Jibo는 255가지감정표현개발에주력했으며, Jibo가보여준다양한서비스와저렴한가격, 자연스런움직임은전세계사람들의관심을끌었음 지보는신장약 30센티미터, 무게약 3킬로그램의탁상형소셜로봇임 두개의고해상도카메라와전방위의소리를감지하는마이크를탑재하고있으며, 몸통과머리를회전시켜다양한동작을표현할수있음 얼굴을검출하여추적하고인식할수있으며사진을촬영하거나영상통화서비스를제공함 고감도의마이크를통한음성인식과자연어처리기능을기반으로집안어디에서나음성으로명령을내리거나대화할수있음 인공지능기술을기반으로한학습능력을통해사용자의취향을파악하여적응하고, 사람에게능동적으로도움을제공할수있음 사회성과감정을자연스럽게표현함으로써사람과수월하게소통할수있음 가정내에서활용하는것을전제로사진사, 메신저, 이야기꾼, 친구, 비디오채팅아바타등의역할을수행함 25
34 전략분야현황분석 일본소프트뱅크는프랑스의로봇업체인알데바란로보틱스를인수한이후휴머노이드형로봇인페퍼 (Pepper) 를출시하여세계소셜로봇산업분야를선도하고있는한편, 샤프와통신업체인 NTT도다양한소형소셜로봇제품의개발과출시에도역량을집중하고있음 샤프 (Sharp) 는스마트폰과로봇을결합한소셜로봇인로보혼 (RoboHon) 을발표함 - 크기 20센티미터, 무게 390그램의휴대가능한소형로봇으로서전화통화가가능하고인공지능기술기반의 마음엔진 이탑재되어있어사용자와의대화가쌓일수록점차진화된교류행동을보여줄수있으며사람의얼굴을알아보고특유의동작을보여주거나춤을추는등의감성반응이가능 통신업체인 NTT는음성기반대화가가능하고사용자의생체신호를측정하고건강을관리하는소형탁상형로봇인 Sota를출시하고고령자요양원을중심으로마케팅활동을진행중임 - 로봇을 800달러에구입후매달 30달러를사용료로지불하는방식의플랫폼비즈니스를채용 소프트뱅크가개발한휴머노이드형로봇페퍼는키는 120 센티미터이고무게는 28 킬로그램으로리튬이온배터리를탑재하고있으며한번충전으로 12시간동작가능 - 머리와손에터치센서, 머리에 2개의고해상도카메라와 4개의마이크, 가슴에자이로센서, 팔에터치센서, 이동부에레이저센서와범퍼센서를탑재하고있으며, 전신의동작은 20개의모터로작동 - 사용자의얼굴을보거나음성을감지하여사람의감정을인식하는 이모셔널엔진 (Emotional Engine) 을탑재한감성로봇으로서사람의감정을세밀하게인식하여반응함으로써자연스럽고비정형화된반응을행동과말로표현할수있음 - 소프트뱅크는구입후일정기간마다구독료를지불하는임대형식의판매정책을통해페퍼를 200만원내외의저가로공급할수있었으며이를통해수차례에걸쳐매진을기록함 - 소프트뱅크는로봇제조원가보다낮은 200만원내외의가격으로로봇을공급하고약정요금과콘텐츠판매를통해수익을내는플랫폼비즈니스모델을채용하여페퍼를보급하고있으며이를통해수차례에걸쳐매진을기록하는등성공적인로봇매출을기록 - 페퍼용앱은현재 200여개로써앱의기능은타이머, 춤시연, 거짓말탐지, 운동보조, 피아노연주, 야구스토리텔링, 영어교습등다양한분야에걸쳐있으며향후킬러애플리케이션의등장가능성을높게예측 - 주로공공시설이나상점의접객과안내서비스에활용되고있음 각로봇은클라우드플랫폼에연결하여학습데이터를저장하고분석결과를입수할수있을뿐아니라학습한지식을다른로봇과공유함으로써일종의집단지성과같은형태의지식확장이가능한클라우드로봇임 2005년에설립된프랑스의알데바란로보틱스 (Aldebaran Robotics) 는 2004년에 EU의프로젝트를통해연구개발되기시작한소형휴머노이드로봇인 NAO를연구용플랫폼으로상품화한이래지속적인연구개발을통해소셜로봇의하드웨어플랫폼, 운영체제, SW 개발체계, 앱스토어등소셜로봇생태계를최초로구축함 신장 58센티미터, 무게 4.3킬로그램으로리튬배터리를탑재하고있으며한번충전에 90분작동가능함 26
35 로봇 얼굴과가슴에 HD 카메라, 네개의마이크, 초음파거리측정기, 두개의적외선센서, 자이로센서, 촉각센서, 압력센서를탑재함 초기에자폐어린이의교육용로봇으로디자인되었으며, 현재는연구용, 축구게임용로봇으로활용되고있음 로봇운영체제인 naoqi를통해운영되며 naoqi가제공하는각종응용프로그래밍인터페이스를통해모든센서와모터를제어할수있음 그래픽인터페이스를통해로봇응용개발이가능한 Choreographe라는도구를제공하고있으며, 최근에는간단한스크립트언어를이용하여대화기반로봇응용개발이가능한 qichat을선보임 EU는 FP6, FP7, Horizon2020으로이어지는다양한소셜로봇관련프로젝트를통해축적한기술력을바탕으로다양한소셜로봇스타트업기업들이활발히활동중임 Blue Frog Robotics는페퍼, 지보와함께세계소셜로봇분야에서가장많은주목을받고있는동반자로봇버디 (Buddy) 를출시함 - 버디는음성기반대화를통해소통하며비서, 보안, 엔터테인먼트, 정보도우미, 커뮤니케이터의역할을수행할수있을뿐아니라고령자를위한건강관리기능도제공 Leka는다운증후군, 자폐증어린이를대상으로교감이가능한소셜로봇인 Leka를개발함 - Leka는동작에반응하는공모양로봇으로굴러다니면서감정표현과대화가가능하고색, 소리, 진동을통해다양한감각을자극하여정서발달을도움 YUMII는얼굴인식을통해사람을알아보고음성기반대화를통해소통하는고령자건강관리용소셜로봇인 Cutii를개발하여소개함 Hease Robotics는이동형안내로봇인 Heasy를개발하여소개함 - Heasy는쇼핑매장, 공공시설등에설치되며고객을맞이하여음성기반대화, 얼굴인식, 감정인식기능을통해각종정보를제공하고길을안내하는등의서비스를자연스럽게수행할수있음 Emotech는음성을기반으로한자연스러운대화를통해소통할수있고사용자의상호작용패턴에따라성격이진화하며학습을통해능동적인서비스제공이가능한탁상형소셜로봇인 Olly를개발하고 CES 2017에서소개함 일본은소프트뱅크를중심으로소셜로봇산업을주도하는한편다양한소형소셜로봇 제품의개발과출시에도역량을집중하고있음 액티브링크는딥러닝플랫폼을채택한근력지원슈트인 파워로더 MS-04 공개 - 사람의하체부분에로봇의다리부분을장착해무거운물건을쉽게들고운반할수있음 - 엔비디아딥러닝플랫폼인 엔비디아젯슨 TX1 을탑재한모니터가부착되어 2족보행시지면의기복이나장애물을확인할수있음 - 사람이평소짐을안고운반하는자세에가깝도록개발돼운반작업시안정감을유지할수있음 27
36 전략분야현황분석 샤프 (Sharp) 는스마트폰과로봇을결합한소셜로봇인로보혼 (RoboHon) 을발표함 - 크기 20센티미터, 무게 390그램의휴대가능한소형로봇으로서전화통화가가능하고인공지능기술기반의 마음엔진 이탑재되어있어사용자와의대화가쌓일수록점차진화된교류행동을보여줄수있으며사람의얼굴을알아보고특유의동작을보여주거나춤을추는등의감성반응이가능 통신업체인 NTT는음성기반대화가가능하고사용자의생체신호를측정하고건강을관리하는소형탁상형로봇인 Sota를출시하고고령자요양원을중심으로마케팅활동을진행중임 - 로봇을 800달러에구입후매달 30달러를사용료로지불하는방식의플랫폼비즈니스를채용 중국의로봇업체들은최근빠른증가세를보이고있으며매년새로운소셜로봇제품을소개하고있어향후관련시장에서큰비중을차지할것으로예상 유비테크로보틱스 (UBTECH Robotics) 는 2016년음성기반대화, 얼굴인식, 사진촬영, 클라우드기반번역기능등을갖춘가정용휴머노이드로봇인알파2를개발하여발표하였고, 2016년에는아마존알렉사와연동하여보다진화된인공지능기능을제공하는링스 (Lynx) 를발표함 선전메이커웍스테크놀로지 (Shenzhen Maker Works Technology) 는두바퀴로균형을잡으면서달리기, 춤추기, 겨루기등동작을할수있는완구형로봇제미니 (Gemini) 를개발하여발표함 로키드 (Rokid) 사는음성기반대화가가능하고날씨, 일정관리등비서기능과스마트홈제어가가능한탁상형소셜로봇인로키드 (Rokid) 를개발함 샤오미 (Xiaomi) 는 2016년인텔과협력하에나인봇 (Nonebot) 플랫폼에감정과손동작을표현할수있는기능을탑재한소셜로봇프로토타입을선보였으나구체적상용화계획은발표하지않음 알리바바 (Alibaba) 는소프트뱅크와제휴하여페퍼를중국에유통하기로하고, 링테크놀로지 (Ling Technology) 는미국의지보사 (Jibo Inc) 와손잡고 2017년중지보의중국어버전을중국에출시할계획을밝히는등선진소셜로봇을도입하는데에도적극적임 (2) 국내업체동향 현대중공업은 15 년 7 월엔진사업부로부터로봇사업부분리독립, 현대기아차및협력업체 해외공장증설로산업용로봇수요증가 한화테크윈은 14 년 11 월삼성테크윈을인수하고, 이를바탕으로로봇무인화사업강화및 의료로봇신규개발추진 SKT 는 14 년 6 월 KT 의교육용로봇 키봇 을생산한아이리버를인수하고, 로봇활용 소프트웨어개발교육프로그램 스마트로봇코딩스쿨 을출시하는등교육용로봇사업 강화 네이버는 15 년 9 월향후 5 년간로봇, 무인자동차, 스마트홈등미래성장분야에 1,000 억 원투자계획발표 28
37 로봇 삼성전자는중소로봇 부품기업과차세대보급형제조로봇개발협력추진 유진로봇은 15 년 1 월사업다각화를위해 CJ E&M 과공동으로 로봇트레인 RT 기반캐릭터 사업진출 한국전자인증의미국현지출자회사인에이아이브레인과인공지능전문기업인보나비전은영어교육을목적으로한친구로봇인타이키 (TYCHE) 를공동개발함 캠브리지영어 ( 초급단계 ) 90% 를응답하는수준의획기적인인공지능로봇으로보고듣고말도하고놀면서아이들스스로지능계발을하도록돕는스마트폰로봇임 최근에는 IoT 장치연계를통한스마트홈의게이트웨이역할을중심으로하는소셜로봇제품들이주로선보이고있음 아이피엘은 2016년음성인식을통해소통하며스케줄, 알람설정등의기능을제공하는개인비서역할, 홈모니터링과순찰등을수행하는경비원역할, 함께게임을하거나춤추고노래하는엔터테이너역할, 집안의가전을제어해주는스마트홈허브역할, 간단한대화를하며인간과공감하는커뮤니케이터의역할등다양한기능을제공할수있는소셜로봇인아이지니 (ijini) 를개발하고, 2016년하반기에중국과 160억원규모의공급계약을체결하는등국내소셜로봇시장을견인하고있음 SK 텔레콤은대화기반의상호작용과음악재생, 스마트홈제어등의기능을제공하는스마트스피커인누구를출시하여성공적인판매량을기록하고있음 LG는스마트홈게이트웨이역할을수행하는허브 (Hub) 로봇을 CES 2017 전시회에소개함. 허브는미국의지보 (Jibo) 와유사한외형과구동부를보유한소셜로봇으로스마트홈제어외에대화기반상호작용, 음악재생, 일정관리등비서기능도제공함. 미국출시용허브는아마존의알렉사 (Alexa) 를기반으로음성기반서비스를제공 29
38 전략분야현황분석 다. 기술인프라현황 주요연구개발기관 전자부품연구원 - 국내최초협업로봇용충돌감지센서-전장일체형경량구동모듈 ( 모터 + 토크센서 + 힘토크센서 ) 기술을개발해포장 / 부품조립등의산업현장에서작업자의안전구현 - 선진기술수준의고출력 BLDC 모터, 충돌감지를위한고감도토크센서및힘-토크 (FT) 센서개발 한국기계연구원 - 양팔로봇개발과제를통하여인간과로봇이공간을공유하는협동로봇플랫폼을개발 - 작업공간을축소하기위하여양팔로봇을도입하는것이전자산업을중심으로필요성이대두되고있으며, 인간과로봇이작업장을공유하는상황에대처하기위하여안전성확보가필수적 한국생산기술연구원 - 외골격근력지원로봇슈트 하이퍼 (HyPer) 개발 : 발, 발목, 허리에사람의생체신호를감지하는 25개정밀감지센서를적용시켜인간의물리적인능력을향상시켜주는고출력외골격로봇슈트개발. 사용자의의도를감지할수있는센서제어알고리즘개발및센서부착형소형액추에이터모듈화기술개발 - 데모데이 에서세계최초소방관용웨어러블로봇기술을선보여최우수상 ( 국무총리상 ) 을수상. 에프알티, 아이리스, LIG넥스원, 이셀전자와공동개발. 세계두번째유압식, 근육강화용웨어러블로봇. 재활보조로봇으로도활용가능 한국로봇융합연구원 - 산업현장적용로봇의부품기술, 플랫폼기술개발및인간 로봇작업공조기술 ( 고출력경량로봇팔기술, 다양한바닥환경극복이동로봇플랫폼기술, 작업부하경감착용형로봇기술 ) 개발 한국과학기술연구원 - 능동안전관절을개발하여로봇이지정된작업을수행중에충돌을감지한경우로봇을정지시키는기술개발 한국로봇산업진흥원 - 로봇산업클러스터 : 센터와장비를구축하고, 기술사업화촉진및로봇창업맞춤형지원과상용화기술개발지원을통해의료, 사회안전, 제조분야의로봇산업육성을목표로함 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 차세대융합기술연구원스마트시스템연구소 - 극한환경로봇연구실 : 인간의활동이극도로제한을받는고방사선 ( 성 ) 환경과같은극한환경에서의작업등을수행하는로봇시스템연구개발 30
39 로봇 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등맞춤형기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원 ) - e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 지능형로봇테스트베드 ( 한국전자통신연구원 ) - 지능형로봇테스트베드에서로봇시험장비및인프라구축, 로봇시험평가방법개발및시험인증체계구축, 로봇시험평가방법개발및시험인증체계구축, 지능형로봇시험지원서비스제공 31
40 전략분야현황분석 6. 중소기업시장대응전략 Factor 기회요인위협요인 서비스로봇산업에대한지원확대 정책 성공적서비스로봇산업화에대한니즈 지방자치단체의시범사업정책증가 로봇이포함된타분야지원정책발표 미시적 R&D 정책 로봇기술을활용한서비스에대한규제존재 산업 우수한 ICT 인프라확보로다양한융복합제품개발가능 최근해외기업들의성공사례로자극받아적극적인사업추진경향성증가 제조용로봇에 비해 상대적으로 취약한 서비스 로봇산업 상대적으로높은진입장벽과시장확보로인해 타업종으로이탈하려는경우가많음 시장 인공지능기술의관심과활용확산으로산업용과 개인용로봇전체에대한수요증가 해외시장진출기반확대 기술과성능에대한지나치게높은기대감 선진국의선점효과 기술 로봇산업에 대한 전반적인 R&D 증가로 제품 경쟁력상승 비교적신규사업분야에서도짧은시간내현장 운용이가능한기술력보유 로봇개발인프라부족 핵심기술에대한국산화비율낮음 해외대기업과의 R&D 비용및기술력격차 기술표준화미흡 4 차산업혁명에대한적극적대응필요 핵심 기반기술국산화시도 중소기업의안정적 R&D 지원필요 제조 판매 서비스를통합한사업모델구축 적극적인해외시장진출시도 중소기업의시장대응전략 단순한기능적수행뿐만아니라안정성과신뢰성을동시에확보해높은시장의기대치에대응 특허공백기술분석을통한연구개발혹은관련기술이전을적극적으로활용 교육, 유통, 게임, 미디어, 엔터테인먼트등타산업과의융복합을통한기술경쟁력확보 제조및판매뿐만아니라중 장기적인서비스를포함한사업화모델구상 32
41 로봇 7. 주요기술개발테마 가. 기술개발테마별개요 기술개발테마 인간친화형협동로봇 착용형근력증강웨어러블로봇 산업용부상방지및작업지원로봇 물류로봇 스포츠시뮬레이터로봇 노인과장애인을위한근력보조웨어러블로봇 소셜로봇플랫폼및서비스 가전로봇 개요 산업자동화분야에사용되며인간과작업공간을공유하면서인간과의직접적인 상호작용을위해설계된로봇 신체외부에착용해근력을증강시키고, 이를통해기존사용자가수행하기 힘들었던과업들을효과적으로수행하도록지원해주는로봇 산업현장에서개별작업에최적화된보조력을생성하여작업자의부상을 방지하거나작업효율을증가시켜주는로봇 인간을대신하여생산자와소비자사이에서원료재료, 부품, 상품을안전하고 효율적으로전달하기위하여물류센터등에서상품을자동으로관리하는로봇 스포츠활동의실제적인움직임을모사하는로봇으로, 실제스포츠환경의제약 요인으로부터벗어나효과적인스포츠활동을가능하게하고실감나는가상의 스포츠체험을제공 노인들과장애인들을위한근력보조서비스를제공하기위해신체외부에 장착하는로봇 사람들의반응이나행동에따라상호작용하는지능형서비스콘텐츠를통해서 사람들의교육및여가활동에도움을주는로봇 일반가정내에서인간과함께생활하며지능형가전역할또는가사활동을 보조하는미래지능형로봇 33
42 전략분야현황분석 나. 기술개발테마별동향및전망 기술개발테마 동향및전망 인간친화형협동로봇 인간친화형협동로봇은온전히수작업만으로진행되는조립라인과자동화된생산라인사이의단점을보완해반자동화된형태로나타나고있음 다품종변량생산에최신기술을필요로하는기업들이직면한유연한생산목표를해결하기위한방안으로주목받고있음 착용형근력증강웨어러블로봇 공장근로자의작업지원을시작으로국방, 안전, 헬스케어, 엔터테인먼트에 이르기까지웨어러블로봇의적용가능성은폭넓은시장적용가능성을가지고 있음 산업용부상방지및작업지원로봇 산업용부상방지및작업지원로봇은전통적인분야에서새로운분야들로 로봇기술의적용이확대되면서발전하는중 물류로봇 물류로봇은경제성장률보다높은성장성과파생시장이기대되는산업으로그 속에서로봇의역할에대한기대가아주높음 스포츠시뮬레이터로봇 스포츠분야의전략적기술개발과글로벌경쟁력제고로고부가가치창출을 위한중요한산업으로스포츠와다양한산업과의높은연계성으로새로운 시장을창출하고있음 노인과장애인을위한근력보조웨어러블로봇 제조, 설계, 소프트웨어등의기존핵심기술역량을웨어러블로봇에접목하여 신속한제품개발과사업화추진전략으로시장의요구에대응 실버산업, 의료산업 등의 사업분야에 진출하려는 기술형 중소기업을 위한 최적의아이템 소셜로봇플랫폼및서비스 소셜로봇은교육용로봇, 엔터테인먼트로봇, 케어로봇, 공공안내로봇등으로 구성, 그외에도다양한서비스산업군이미래수요시장을구성 휴머노이드로봇의적용범위확대및플랫폼비즈니스모델로진화가능성 가전로봇 1인가구및고령화가구의증가로인해가사노동에대한지원을필요로하는시장의요구가있음 가전로봇기술은기계, 전기, 전자, 통신및네트워크기술및인공지능기술의유기적인융합과연계가시급하며, 특히기능적인수행뿐만아니라인간과공존하는특성이있으므로안정성과신뢰성의확보가중요 34
43 로봇 8. 중소기업기술개발테마 가. 중소기업기술수요 중소기업, 대기업 공기업등에대하여설문조사및방문조사를통하여기술수요조사를실시 주요기술분야별신청과제에대한내용을분석하여각분야별로중소기업이관심을갖는제품을파악 로봇 / 자동화기계관련 S/W 분야에서는소형수중탐사정자율방향인터페이스모듈, 정밀자율비행농업방제솔루션, 객관적데이터도출을위한자동화파레트티칭개발등에대한수요가높은것으로나타났으며, 이를통해스마트시계 밴드, 휴대용생체인증기기 시스템등제품개발에관심이높은것으로나타남 로봇제어및지능화기술분야에서는로봇제어를위한 GPS 내장형관성항법장치 (INS), 지능형서비스기능을갖춘고성능모션플랫폼개발, 이동로봇의 3D 실내공간정보생성및자율주행기술에대한수요가높은것으로나타남 로봇설계기술분야에서는다자유도병렬로봇기반인터랙티브가상현실체험시스템, 그라인딩작업을위한산업용로봇의힘측정장치및힘제어기술, 무선리모콘식중하중운반용도비로봇개발기술등에대한수요가높은것으로나타남 로봇비젼및생산자동화기술분야에서는지능형멀티에이전트이송로봇시스템을위한자율주행컨트롤러, 고속자율주행이가능한복차선이액형차선도색장비, 스마트티칭이가능한 SMT 디스펜서로봇시스템등의기술에대한수요가높은것으로나타남 기타로봇 / 자동화기계관련기술분야에서는외벽청소용로봇시스템, 고령자및장애자를위한포터블목욕시스템, IoT 기반무인형스마트농업자동화시스템및재배단이송로봇등의수요가높은것으로나타남 [ 중소벤처기업부 R&D 지원사업신청과제현황 ] 주요품목 과제건수 합계 점유율 (%) 평균증가율 (%) 로봇 / 자동화기계관련 S/W 로봇제어및지능화기술 로봇 로봇설계기술 로봇비젼및생산자동화 기타로봇 / 자동화기계관련기술 합계
44 전략분야현황분석 나. 중소기업기술개발테마 로봇 기술개발테마인간친화형협동로봇착용형근력증강웨어러블로봇산업용부상방지및작업지원로봇물류로봇스포츠시뮬레이터로봇 개요 산업자동화분야에사용되며인간과작업공간을공유하면서 인간과의직접적인상호 작용을위해설계된로봇 신체외부에착용해근력을증강시키고, 이를통해기존사용자가 수행하기힘들었던과업들을효과적으로수행하도록지원해주는 로봇 산업현장에서개별작업에최적화된보조력을생성하여작업자의 부상을방지하거나작업효율을증가시켜주는로봇 인간을대신하여생산자와소비자사이에서원료재료, 부품, 상품을안전하고효율적으로전달하기위하여물류센터등에서 상품을자동으로관리하는로봇 스포츠활동의실제적인움직임을모사하는로봇으로, 실제 스포츠환경의제약요인으로부터벗어나효과적인스포츠 활동을가능하게하고실감나는가상의스포츠체험을제공 노인과장애인을위한근력보조웨어러블로봇 노인들과장애인들을위한근력보조서비스를제공하기위해신체 외부에장착하는로봇 소셜로봇플랫폼및서비스 가전로봇 사람들의반응이나행동에따라상호작용하는지능형서비스콘텐츠를통해서사람들의교육및여가활동에도움을주는로봇 일반가정내에서인간과함께생활하며지능형가전역할또는가사활동을보조하는미래지능형로봇 36
45 기술개발테마현황분석 인간친화형 협동로봇
46
47 인간친화형협동로봇 정의및범위 인간친화형협동로봇이란인간과작업공간을공유하면서인간과의직접적인상호작용을위해설계된로봇으로, 안전하고사용하기쉬우며유연하고이동설치가용이하며저가의경량플랫폼을갖추고인간이어떤작업을성공적으로수행할수있도록도와주는로봇을의미 인간친화형협동로봇기술은기구모듈기술, 제어기술, 인터페이스기술, 작업지능기술, 안전기술, 응용및평가기술등을포함정부지원정책 범부처합동으로국내로봇산업공급역량강화기반조성과수요기반확충을위해제조로봇을활용한스마트고장고도화등을포함한 2017년지능형로봇실행계획발표 ( ) 충돌안전, 직관적교시, 사용자인터페이스, 작업유형화등협동로봇관련원천기술확보를위한기술고도화로봇제품단가절감을위한핵심로봇부품저가화및신규유망분야공정특성맞춤형기술개발추진 자동차, 휴대폰, 가전, 중소제조등국내제조업기반과연계한사업화적용실적 (reference) 확보후해외시장진출추진 산업통상자원부는제조업생태계를혁신하고주력산업경쟁력제고를꾀하기위해 ʻ제조업혁신 3.0 전략ʼ을추진하고제조업공장 1만개의스마트화를추진 ( ) 중소기업시장대응전략 강점 (Strength) ( 환경 ) 4차산업혁명시대스마트제조분야가증가 ( 기술 ) 고효율 저비용생산가능 ( 정책 ) 지속적인국가 R&D 투자를통한기반기술확보기회 (Opportunity) ( 환경 ) 협동로봇에대한수요증가 ( 기술 ) 다양한구동방식개발을통한경쟁력상승 ( 정책 ) 스마트공장지원정책발표 약점 (Weakness) ( 환경 ) 아직산업구조가약한편 ( 기술 ) 핵심기술에대한국산화비율낮음 ( 정책 ) 수요자연계정책부족위협 (Threat) ( 환경 ) 개발인프라부족 ( 기술 ) 해외대기업과의 R&D 비용격차 ( 정책 ) 수출지원정책부족 중소기업의시장대응전략 지속적기술개발을통해저가형협동로봇에대한확실한강점보유 핵심부품국산화를통한가격경쟁력확보 다양한환경과분야에서유연하게사용가능한솔루션개발및보급필요
48 핵심요소기술로드맵
49 인간친화형협동로봇 1. 개요 가. 정의및필요성 인간친화형협동로봇이란인간과작업공간을공유하면서인간과의직접적인상호작용을위해설계된로봇을의미 협동로봇 (Collaborative robot) 은줄여서 Cobot 이라고도하며, 인간과로봇의공유작업공간에서인간과물리적으로상호작용하는로봇 ( 출처 : Wikipedia) 협동로봇은인간과의직접적인상호작용을위해설계된로봇. 일반로봇은다소자율적으로움직이도록만들어졌으나협동로봇은사람이어떤작업을성공적으로수행할수있도록도와줌 ( 출처 : TTA, IT용어사전 ) 펜스안에서홀로작업하던로봇이인간과같은공간에서작업한다는의미이기때문에협업로봇이아닌협동로봇으로표현함. 한국로봇산업협회는국제표준 ISO 의한글화작업에서협동로봇으로번역하였고, 한국기술표준원은국내표준 KSB ISO 에서협동로봇으로통일 인간친화형협동로봇의주요특징은안전, 쉬운사용, 저렴한가격 안전 (Safe) : 기존산업용로봇에필수적이었던안전펜스구성필요없이작업자와로봇이작업공간을공유하며협동작업가능 쉬운사용 (Easy to use) : 소형, 경량으로유연하며이동이가능할뿐만아니라전문엔지니어가아닌일반작업자도쉽게티칭할수있음 적정가 (Affordable) : 상대적저가격과빠른투자회수가가능하여중소기업에서협동로봇도입이크게증가할것으로예상 제조스마트화, 셀공정과수작업라인으로적용확장 인간친화형협동로봇은온전히수작업만으로진행되는조립라인과자동화된생산라인사이의단점을보완해반자동화된형태로나타나고있음 다품종변량생산에최신기술을필요로하는기업들이직면한유연한생산목표를해결하기위한방안으로주목받고있음 인간친화형협동로봇의가장큰이점이면서중요한이슈는안전 인간과로봇이작업공간을공유하기위해서는안전펜스나안전지대구성없이로봇과함께, 어떤때는로봇과부딪히면서도안전하게작업이가능해야함 협동로봇안전관련표준 : ISO & ISO (Safety requirements for industrial robots), ISO/TS (Collaborative robots) ISO/TS 15066은협동작업과관련한상세한조건을담고있는표준 (2016년) 으로이문서에포함된협동로봇안전요구조건에대한 Verification & Validation 논의활발 41
50 기술개발테마현황분석 ISO/TS 에서안전에대한기능은 ISO 을준용. 일부업체에서는카테고리 3 의 PL=d 등급획득을통해협동로봇안전기준확보 전통적인산업용로봇과인간친화형협동로봇의지속적기술성장요구 제조용로봇은용도에따라이적재용로봇, 공작물탈착용로봇, 용접용로봇, 조립및분해용로봇, 가공용및표면처리로봇, 바이오공정용로봇, 시험검사용로봇, 기타제조업용로봇등으로구분 전통적인산업용로봇은단일품목의대량생산공정, 장기적생산공정, 속도가빠르고가반하중이큰작업에유리하고, 인간친화형협동로봇은다품종소량생산공정, 단기적생산공정, 인간로봇협동생산공정과가반하중이작은작업등에적합 산업용로봇은원천기술을보유하고유럽과일본의몇몇메이저업체들이세계시장을장악하고있으며, 신기술개발및 ICT 기술과의융합을통해지속적인시장지배력확대추진 제조업의스마트화정책에따라전통적인산업용로봇수요의지속과중소규모수작업라인을중심으로인간친화형협동로봇수요의증가가예측됨에따라기존산업용로봇메이저업체들과의차별화를통한전략적기술개발접근필요 [ 산업용로봇과협동로봇의특징비교 ] 구분 전통적산업용로봇 인간친화형협동로봇 비용 고가 저가 ( 약 25% 수준 ) 프로그래밍 어렵고, 단일운용제한 쉽고, 응용용이 속도 빠름 느림 안전 위험 ( 안전장치필수 ) 안전 공간점유율 높음 낮음 설치위치 제한적, 고정 다중, 이동가능 운용융통성 낮음 높음 재사용성 제한적 높음 자금회수기간 장기 단기 개발키포인트 정확성, 반복정밀도 유연성, 쉬운사용 * 출처 : Technavio, Humarobotics 등 42
51 인간친화형협동로봇 나. 범위 (1) 제품분류관점 인간친화형협동로봇은기구모듈, 제어기술, 인터페이스, 작업지능, 안전기술, 응용및평가등에따라다양한기술로분류 기구모듈기술은안전성과포터블기능을가진경량로봇기구부를설계하는기술로모터, 감속기, 센서등을포함하고, 축수및연결방식에따라다양한설계가능 제어기술은마이크로프로세서를사용하여로봇을정확하게구동하기위한알고리즘을구현하기위한기술로, PID 피드백제어, 적응제어, 중력보상, 역방향기구학기술등을포함 인터페이스기술은쉬운사용을위해사용자친화적인교시장치, 스마트인터페이스, 비프로그래밍모션학습. 신속설치및캘리브레이션등을포함 작업지능기술은협동로봇의지능작업을지원하기위해환경정보인식, 물체인식, 모델변경대응유연작업기술등을포함 안전기술은인간과로봇이공유하는작업공간에서안전을제공하기위해인간-로봇이격거리감지, 충돌예측, 충돌감지, 충격량최소화기술등을포함 응용및평가기술은협동로봇의공정적용과안전평가를위해빈피킹, 비주얼서보잉, 공정적용, 위험도평가, 안전성검증기술등을포함 [ 제품분류관점기술범위 ] 기술개발테마 제품분류관점 기구모듈 세부기술 안전한다자유도경량로봇기구부기술 모터, 감속기, 센서, 브레이크일체저동력액추에이터모듈기술 제어 피드백제어, 적응제어, 유연개방형로봇제어기기술 중력보상, 역방향기구학, 시뮬레이션제어기술 인간친화형협동로봇 인터페이스 작업지능 사용자친화형교시장치, 멀티모달스마트인터페이스기술 모션학습제어, 신속설치및캘리브레이션기술 비전시스템, 환경정보인식및물체인식지능기술 모델변경에대응가능한유연작업기술 안전 인간 - 로봇간근접거리모니터링, 작업공간감지기술 충돌감지및충격량최소화, 협동로봇안전요구조건적용기술 응용및평가 빈피킹, 비주얼서보잉, 공정적용및평가기술 인간로봇협동작업상황위험도평가및안전성검증기술 43
52 기술개발테마현황분석 (2) 공급망관점 인간친화형협동로봇기술은제조공정스마트화와관련한다양한산업분야에서활용 가능하며, 이러한기술을지원하기위한공급망단계별로구분가능 인간친화형협동로봇관련부품및모듈에는로봇을움직이는동력원인액추에이터, 로봇구동과관련한감속과적절한토크발생및감지를위한감속기와힘 / 토크센서, 모터제어기, 로봇제어기, 통신모듈, 카메라모듈, 교시장치등을포함 인간친화형협동로봇플랫폼에는사용편의성과안전기능을갖춘 6축또는 7축수직다관절로봇, 스카라로봇, 싱글암또는듀얼암로봇, 저하중또는고하중로봇, 고정식또는이동식플랫폼등을포함 엔드이펙터는로봇암말단에부착하는장치로작업대상물을잡는그리퍼, 대상물을도장, 용접, 절단, 드릴링, 밀링, 볼팅등의작업을위한스프레이건, 용접토치, 드릴, 그라인더, 절단용워터제트, 너트런너등을포함 인간친화형협동로봇응용서비스에는안전하고쉬운사용을지원하기위한안전시스템, 비전시스템, 캘리브레이션, 지능소프트웨어등을포함하며, 픽앤플레이스, 핸들링, 포장, 팔레트적재, 조립, CNC, 머신텐딩, 사출성형, 접착및용접, 품질검사등의응용서비스를포함 [ 공급망관점기술범위 ] 기술개발테마공급망관점세부기술 유압구동기, 공압구동기, AC 서보모터, DC 서보모터 부품및모듈 하모닉드라이브, RV 감속기, 유성기어, 볼스크류, 벨트, 케이블 모터제어기, 로봇제어기, 통신모듈, 카메라모듈, 힘 / 토크센서 교시장치 ( 티칭팬던트 ), 조이스틱, 스마트디바이스등 인간친화형협동로봇 플랫폼 엔드이펙터 6축/7축수직다관절로봇, 스카라 ( 수평다관절 ) 로봇 단팔 / 양팔로봇, 페이로드별 (5kg이하/10kg이하 /10kg이상) 로봇 공압식 / 전기식그리퍼, 툴체인저, 클램프, 석션컵 너트런너, 용접토치, 스프레이건, 드릴커터, 로봇핸드등 응용서비스 안전시스템, 비전시스템, 캘리브레이션, 지능소프트웨어 픽앤플레이스, 핸들링, 포장, 팔레트적재, 조립 CNC, 머신텐딩, 사출성형, 접착및용접, 품질검사등 44
53 인간친화형협동로봇 2. 외부환경분석 가. 산업환경분석 (1) 산업의특징 외국계대형로봇업체들이제조용로봇분야를선점하고있어전략적기술개발과글로벌경쟁력제고로국내기업들의시장진출및확대가필요한산업 유럽과일본의주요로봇대형제조사 (ABB, FANUC, KUKA, YASKAWA 등 ) 가제조로봇시장의대부분을차지할정도로시장영향력이막강 이들제조사들은 ICT 기술과의융복합을통해지능화, 고속화, 사용자협업, 무인자동화, 에너지효율화등의기술개발을통한시장확대를추진하고있음 또한소형고속화를통한면적절감및생산성향상, 신뢰성확보를위한인지및진단기술개발, 범용성향상을위한다중부품대응과고속 3D 비전등의기술개발이활발히진행 Universal Robots, Rethink Robotics 등에서실험적으로선보인인간친화형협동로봇이 KUKA, YASKAWA, FANUC 등대부분의로봇제조사들이제품화경쟁 노동인력, 생산환경의변화및제조업의부활로인해로봇수요증가 전세계적으로인건비증가와고령화에따른노동인력의감소로로봇에의한노동인력대체와생산성향상이절실함 ( 한국 65세이상인구비율은 1970년 3.1% 에서 2030년 24.3% 로증가예상 ) 중국등신흥국의임금인상폭의생산성증가율초과에따른해외생산이갖는비용효과감소와맞물려미국의제조업이살아나고있고전통제조업체들이생산성향상및비용절감을위해로봇에대한수요가증가하고있음 세계의공장역할을하고있는중국의 1인당생산성이낮은이유를로봇밀도가낮기때문이라는분석이있음. 낮은로봇밀도를개선하려는중국의노력에의해중국의로봇시장이급성장하고있음 일본은전통적인제조용로봇강국으로자리잡고있어자국내내수시장의부진에도불구하고해외시장을크게확보하고있기때문에일본의로봇생산액은지속적으로성장하고있음 복잡한조립작업이나유형화되지않은공정의자동화수요대응필요 용접및도장공정의경우위치정밀도가중요하였으나, 부품핸들링및조립분야에서는위치정밀도만으로는충분하지않고힘 / 모멘트제어기능과쉬운티칭기능등이요구됨 산업용로봇을적용한기존생산라인은대부분컨베이어벨트또는팔레트시스템을도입한경우로조립및검사등을하나의셀단위로수행하는셀공정의자동화요구에대응이필요 수작업라인을포함하여유형화, 체계화되지않은공정에인간과로봇이작업공간을공유하면서협동작업수행을통해공정유연성을확대필요 45
 은 Safety-rated Monitored Stop, Hand Guiding, Speed and Separation Monitoring, Power and Force Limiting의 4가지로표준화되어있고, 이중에서하나이상의협동작업모드를수행가능하면협동로봇으로정의 실제시장에서는협동로봇을")
![Power and force Limiting 조건을만족하는로봇으로한정하기도함 인간에게가하는생체역학적물리량 ( 접촉힘, 압력 ) 을엄격히제한하여실제운용간인간과의접촉및충돌상황에서도인간의상해로부터안전을보장가능해야함 [ 국제표준 ISO 10218-1 의 Collaborative Operation 유형 ] * 출처 : ISO 10218-1](/docs-images/93/112329278/images/54-2.jpg "글로벌제조기업들의협동로봇도입을통한자동화영역확대 BMW는의장공정작업에협동로봇 UR10을도입하여안전펜스없이작업자와협업할수있도록적용하였으며, 품질검사용공정에도확대적용예정 GE는 LED 조명조립공정에협동로봇 Saywer를도입하여기존공정변경없이설치하여운영중으로계절별생산물량변동이큰플랜트를대상으로확대도입추진")
54 기술개발테마현황분석 산업용로봇의협동운전및협동로봇의국제안전규격충족필요 국제표준 ISO 의 5.10절에따르면협동운전 (Colaborative Operation) 은 Safety-rated Monitored Stop, Hand Guiding, Speed and Separation Monitoring, Power and Force Limiting의 4가지로표준화되어있고, 이중에서하나이상의협동작업모드를수행가능하면협동로봇으로정의 실제시장에서는협동로봇을 Power and force Limiting 조건을만족하는로봇으로한정하기도함 인간에게가하는생체역학적물리량 ( 접촉힘, 압력 ) 을엄격히제한하여실제운용간인간과의접촉및충돌상황에서도인간의상해로부터안전을보장가능해야함 [ 국제표준 ISO 의 Collaborative Operation 유형 ] * 출처 : ISO 글로벌제조기업들의협동로봇도입을통한자동화영역확대 BMW는의장공정작업에협동로봇 UR10을도입하여안전펜스없이작업자와협업할수있도록적용하였으며, 품질검사용공정에도확대적용예정 GE는 LED 조명조립공정에협동로봇 Saywer를도입하여기존공정변경없이설치하여운영중으로계절별생산물량변동이큰플랜트를대상으로확대도입추진 FANUC은사출성형기를제조하는공정에무거운물건을운반할수있는자사의 CR-35iA를도입하여볼스크류에베어링부품을압입하는작업을여성작업자가혼자수행 P&G는향수샘플제품포장공정에협동로봇 UR5를도입하여컨베이어픽앤플레이스 (Pick & Place) 작업에활용중으로공정변화가많은다품종소량생산공정에확대적용 가와사키중공업의 duaro 양팔협동로봇은자동차와전자산업용으로개발했지만, 편의점용주먹밥포장작업에도입되어활용되는등다양한분야에서활용됨 46

55 인간친화형협동로봇 조립공정의자동화와생산성향상추진 대부분의조립공정은주로사람의수작업공정으로구성되어있고, 전체조립공정의 60~70% 는사람의리소스가낭비되거나부가가치가낮은작업임에도불구하고자동화적용이어려움 인간친화형협동로봇은리소스가낭비되거나부가가치가낮은 20~30% 작업을자동화가능 협동로봇은단순반복작업에투입하고숙련공은보다부가가치있는작업에투입하여기업의제조경쟁력확보가가능함 인간-로봇협력생산을통한공정유연성의극대화 정교한작업이요구되는생산공정에서는로봇메커니즘기술및센서기술뿐만아니라학습되지않은작업환경에적응할수있는작업지능기술등난이도높은기술개발필요 이러한생산라인의자동화수요에대응하기위해인간과함께배치되어작업할수있는인간친화형협동로봇이대안으로부각 인간이작업하는것이효율적인공정은인간작업자가수행하고, 나머지공정은로봇이수행하는효율적인분업화가능 인간-로봇협력생산은완전무인화에도달하기위해거쳐야할기술개발단계이며, 단기간내에공정의유연성을높이기위한현실적인솔루션이될수있음 * 출처 : 한국기계연구원 BIG 사업기획보고서 [ 로봇기술의발전단계 ] 47
56 기술개발테마현황분석 제조업의중요성을재인식하고스마트제조를통한산업혁명을추진 독일은 2006년부터첨단기술전략을추진해왔으며, 2011년 Industrie 4.0 전략을첨단기술전략에포함하여제4차산업혁명을대응 - Industry 4.0은센서, 로봇산업, 혁신제조공정, 물류및정보통신기술을핵심으로지능형생산시스템을갖춘스마트팩토리로의진화를추구 미국은제조업경쟁력강화와첨단제조업육성을위해 2011년 ' 첨단제조파트너십 (Advanced Manufacturing Partnership)' 프로그램을추진 - 지역별로기술별특성화연구소를설립하고산학연파트너쉽을구축하여이를중심으로첨단제조기술개발 일본은경제장기침체를극복하고신성장동력확충을위해 2013년 일본재흥전략 을추진, 2015년제4차산업혁명에대응하기위해이전략을보완한일본재흥전략 2015를발표 - 일본의강점인로봇에의한산업혁명을 10대과제로선정 중국은선진국들의제4차산업혁명정책에국가적으로대응하기위해 2015년 중국제조 2025 를발표하고, 자원집약형산업에서기술집약형스마트제조강국으로도약하기위해신산업체계구축 - 10대육성산업을선정하고, 5대중점프로젝트추진 한국도 2014년부터스마트공장의확산을통해제조업생태계를혁신하고주력산업경쟁력제고를꾀하기위해 제조업혁신 3.0 전략을수립추진 (2014년 6월, 산업통상자원부 ) 국가적인아젠다로제조분야와협동로봇발전전략수립및연구개발추진 미국은제조업부흥목적의 첨단제조파트너십 일환으로 국가로봇계획 (NRI) 을추진하고, 인간과동일공간작업로봇의개발을지원 유럽은범국가적로봇연구프로그램 SPARC 추진하고, 인간중심의산업용로봇 Rosetta Project, 지능형중소기업형로봇 SMERobotics Project, 미래제조공정의인간-로봇협조기술 RoboPartner Project, 인간-로봇협력공정구현 X-Act Project 등다수의 EU 프레임워크프로그램을진행 일본은범정부차원의 로봇신전략 추진하고, 로봇보급확산과활용확대를위한실증사업추진 중국은 중국제조 2025 핵심산업분야에로봇을선정하고주요공정스마트화등을추진 4차산업혁명대응을위한정부의로봇산업지원정책확대 4차산업혁명이가속화함에따라급변하는수요에신속히대응하기위해서는맞춤형유연생산체제로의전환이필수적 산업통상자원부는제조업생태계를혁신하고주력산업경쟁력제고를꾀하기위해 ʻ제조업혁신 3.0 전략ʼ을추진하고제조업공장 1만개의스마트화를추진 ( ) 산업통상자원부는 2025년까지스마트공장 3만개구축등중소및중견기업의 4차산업혁명대응을위한 스마트제조혁신비전 2025 발표 ( ) 범부처합동으로국내로봇산업공급역량강화기반조성과수요기반확충을위해제조로봇을활용한스마트고장고도화등을포함한 2017년지능형로봇실행계획발표 ( ) 48
57 인간친화형협동로봇 인간친화형협동로봇국가표준제정요구 스마트공장보급확산과연계하여인간친화형협동로봇의수요를창출하고안전성확보및품질향상등을통한수출경쟁력강화를위해국가표준 (KS) 을제정필요 산업용협동로봇은협동작업시인간과의충돌방지를위해로봇의최고속도를 250mm/s 이하로제한하고동작정확도, 반복정밀도, 전자파적합성등의성능규정 국가표준제정을통해국산로봇의내수확대및수출촉진이기대되고, 협동로봇의사용확대로스마트공장지원, 고품질이동로봇제품의보급 확산기대 ( 산업통상자원부국가기술표준원 ) 49
58 기술개발테마현황분석 (2) 산업의구조 인간친화형협동로봇은전방산업으로자동차, 전자, 금속및기계, 식품및음료, 가구및비품, 플라스틱및폴리머, 제약및화학산업과같은전반적인제조업과연관관계이며, 후방산업으로는액추에이터, 센서, 제어, 통신, 시스템설계등과연관되어있는구조 전방산업인제조업의지속적인성장에따라협동로봇산업도활성화되고, 이에따라로봇을구성하는액추에이터, 센서, 제어기, 통신모듈등과같은후방산업의성장및투자효과기대 다양한전방산업과의연계성이있어자동차, 전자등의산업분야별로특화된기술외에도특수목적이나환경의제조분야와타산업에대한대응필요 자동차산업은전통적인산업용로봇이집중적으로사용되고있는시장으로용접이나도색등기존응용분야이외에도가이던스나툴링등협동작업이필요한상황에대한꾸준한수요가예상됨 반도체및디스플레이산업분야는로봇도입을통한자동화가많이이루어져있지만전자제품제조라인은상대적으로자동화가미흡한상황으로협동로봇의수요가클것으로예측 금속및기계, 식품및음료, 가구및비품, 플라스틱및폴리머, 제약및화학등의제조업뿐만아니라농수산산업등다른산업으로의확대전략필요 협동로봇을포함한제조용로봇시장은자동화장비시장과밀접한관련성이있음. 자동화에있어순수한로봇시장은 17%, 모션시장은 12%, 머신비전시장은 20% 정도를차지함 - 대부분의제조로봇메이저사들은상기의시장에동시에참여하고있는경우가많음 후방산업은제조업의첨단화에기여할것으로예상되며, 지속적으로수요가증가할것으로전망되는산업 스마트액추에이터, 감속기, 공압유닛, 센서등의부품및모듈은높은기술수준을요구하고초기투자에대한비용부담으로후방산업관련부품기술개발을기피하고해외의존도가심화되고있어미래가치확보를위한노력필요 로봇모션의정밀제어및유연구조를가지는개방형소프트웨어개발로다른플랫폼으로의이식성을확보를위한지원필요 후방산업인모션제어, 통신제어, 인식, 시스템설계, 소프트웨어, 소재, 제품디자인등의분야와도유기적인연계가중요하며, 시스템통합및제품화를위한적극적인투자필요 [ 인간친화형협동로봇분야산업구조 ] 후방산업인간친화형협동로봇분야전방산업 모터, 스마트액추에이터, 감속기, 센서, 구동, 모션제어, 통신제어, 시스템설계, 공압, 비전, 인식, 소프트웨어, 소재, 제품디자인등 액추에이터및제어기모듈, 단팔 / 양팔수직다관절 / 스카라로봇, 엔드이펙터, 교시장치 ( 티칭팬던트 ), 협동로봇응용서비스 자동차, 조선, 전자, 금속및기계, 식품및음료, 가구및비품, 플라스틱및폴리머, 제약및화학, 농수산산업등 50
59 인간친화형협동로봇 나. 시장환경분석 (1) 세계시장 제조업의공정자동화와스마트팩토리확산과함께제조용로봇의수요는지속적으로확대될 것으로전망되며, 기존산업용로봇도입이어려웠던셀공정이나중소규모수작업라인에 적용가능한인간친화형협동로봇의수요는폭발적으로증가할것으로예측 인간친화형협동로봇분야의세계시장규모는 2016년 1억 7,670만달러규모로, 2017년부터 2021년까지연평균 56.94% 성장해 17억 3,770억달러규모에달할전망 산업계에서의자동화에대한투자증가와함께저가격과빠른투자회수로중소기업에서의협동로봇도입이크게늘어날것이기때문에고성장할것으로분석 (MarketsandMarkets, 2016) [ 인간친화형협동로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 세계시장 , , * 출처 : Collaborative Robots Market by Payload Capacity, Industry, Application, and Geography Global Forecast to 2023(Marketsandmarkets, 2017) 인간친화형협동로봇의세계시장규모는시장조사기관과조사시점에따라추정치에다소차이가있음 Technavio사에서는 2016년 1.99억달러, 2020년 12.36억달러, 2021년 21.01억달러규모로성장할것으로전망하고있으며, 성장률도 50% 대에서 70% 대로매년지속적으로증가할것으로전망 (Technavio, 2016) Global Collaborative Robots Market ($ millions) * 출처 : Technavio, GLOBAL COLLABORATIVE ROBOTS MARKET [ Technavio 의협동로봇세계시장전망 ] 51
60 기술개발테마현황분석 한편, Grand View Research사에서는 2015년 1.12억달러, 2020년 5.85억달러규모로연평균 39.16% 성장할것으로상대적으로소극적전망 하지만 2020년이후폭발적인성장을전망하고있으며, 2021년 9.02억달러, 2025년 67.74억달러규모로 2016년이후연평균성장률을 53.2% 로전망 (Grand View Research, 2016) 인간친화형협동로봇의응용분야별시장전망 인간친화형협동로봇의수요는조립, 픽앤플레이스, 머신텐딩등의응용분야가가장클것으로전망되며, 품질검사, 핸들링, 포장등의응용분야의수요도많을것으로예측 조립분야는 2015년 0.24억달러에서 2020년 2.96억달러규모로성장, 포장분야는 2015년 0.1억달러에서 2020년 1.24억달러규모로성장, 품질검사분야는 2015년 0.15억달러에서 2020년 1.83억달러규모로성장할것으로전망 (MarketsandMarkets, 2016) Grand View Research사에서는핸들링과머신텐딩분야의시장이가장클것으로전망하고있으며, 이어조립분야와품질검사분야가클것으로전망 (Grand View Research, 2016) [ 인간친화형협동로봇응용분야별세계시장규모및전망 ] ( 단위 : 백만달러, %) 응용구분 CAGR 조립 픽앤플레이스 핸들링 포장 품질검사 머신텐딩 접착및용접 기타 합계 , , * 출처 : MarketsandMarkets (2016), Collaborative Robots Market - Global Forecast to 2022 인간친화형협동로봇의산업분야별시장전망 인간친화형협동로봇은자동차, 전자, 금속및기계등분야의시장이가장클것으로전망되며, 플라스틱및폴리머, 식품및음료, 가구및비품, 의약및화학산업분야의수요도많을것으로예측 자동차산업은 2016년 0.42억달러에서 2022년 7.76억달러규모로성장, 전자산업은 2016년 0.36억달러에서 2022년 5.61억달러규모로성장, 금속및기계산업은 2016년 0.34억달러에서 2022년 6.02억달러규모로성장할것으로전망 (MarketsandMarkets, 2016) 52
61 인간친화형협동로봇 * 출처 : Grand View Research Inc., Collaborative Robots Market Analysis And Segment Forecasts To 2025 (RIA, International Federation of Robotics, Factor-tech, Discover Magazine, Hoover s, Primary Interviews, Company Annual Reports, and Grand View Research) [ 인간친화형협동로봇산업분야별성숙도및성장률전망매핑 ] 기존산업용로봇시장의지속적인성장과함께인간친화형협동로봇시장의부각전망 산업용로봇세계시장규모는 2015년 111.3억달러규모로추산되며, 소프트웨어, 주변기기, 시스템엔지니어링등을포함한제조로봇시스템시장은 350억달러규모로추정 (IFR, 2016) 2016년산업용로봇세계시장규모는 131억달러규모로 2015년대비약 18% 성장한것으로추산되며, 로봇시스템시장은 400억달러규모로추정 (IFR, 2017) 현재전체산업용로봇시장대비협동로봇의시장규모는미미한수준이지만, 2016년부터 2022년까지협동로봇시장의평균연평균성장률은기존산업용로봇시장에비해약 6.8배정도클것으로전망 (MarketsandMarkets, 2016) 53
62 기술개발테마현황분석 (2) 국내시장 국내인간친화형협동로봇시장규모는 2016 년기준 억원으로추산되며, 연평균 성장률은 66.2% 로국내시장의고성장을유지하여 2021 년에는 1,206.8 억원규모의 시장으로성장할것으로예상 [ 인간친화형협동로봇분야의국내시장규모및전망 ] ( 단위 : 억원, %) 구분 CAGR 국내시장 * 출처 : Collaborative Robots Market - Global Forecast to 2022(MarketsandMarkets, 2016) 국내인간친화형협동로봇시장규모는 2022년 1.61억달러 (1,773억원 ) 으로연평균 60% 이상의고성장이지속될것으로예상 (MarketsandMarkets, 2016) 2015년기준으로아시아태평양지역의협동로봇시장은 3,280만달러 (360.8억원 ) 규모이며, 일본이 1,190만달러 (130.9억원 ), 중국이 1,150만달러 (126.5억원 ), 한국이 520만달러 (57.2억원 ), 나머지굮가가 420만달러 (46.2억원 ) 의시장형성 국내협동로봇설치대수는 2015년 186대에서 2020년 2,707대규모로연평균 70.84% 증가할것으로예상 (MarketsandMarkets, 2016) [ 국내인간친화형협동로봇분야의설치대수기준규모및전망 ] ( 단위 : 대수, %) 구분 CAGR 국내시장 ,007 1,523 2, * 출처 : Collaborative Robots Market - Global Forecast to 2022(MarketsandMarkets, 2016) 국내제조업용로봇시장의지속적인성장에따라국내인간친화형협동로봇시장도고성장할것으로전망되며, 로봇부품및부분품시장에대한수요도증가할것으로전망 2015년기준로봇산업실태조사보고서에따르면제조업용로봇의국내시장규모는 2014년 2조 3,061억원에서 2015년 2조 4,293억원으로 5.3% 성장하였고, 로봇부품및부분품시장은 2014년 6,135억원에서 2015년 9,397억원으로 53.2% 증가 ( 로봇산업실태조사, ) 54
63 인간친화형협동로봇 (3) 무역현황 인간친화형협동로봇이라는품목으로수출입통계가집계되지않아무역현황을분석하는데한계가있어수출품목중기타산업용로봇이포함되는무역코드 (HSK ) 의무역현황을살펴보았으며, 수출량이증가하는추세임 수출현황은 12년 1억 5,576.4만달러에서 16년 1억 7,946.2만달러수준으로증가하였으며, 수입현황은 12년 1억 1,773.5만달러에서 16년 1억 2,464.9만달러수준으로증가하여무역수지흑자폭이증가 최근 5년 ( 12~ 16년) 간연평균성장률을살펴보면수출금액은 3.6% 로증가하였으며, 수입금액은 1.4% 로증가하여전체무역수지는 9.6% 증가한것으로나타남 무역특화지수는 12 년 (0.14) 부터 16 년 (0.18) 까지소폭증가한것으로나타나수출특화상태가 점차개선되고있고국내기업의수출량도증가하고있는것으로나타났으며, 국내의기타 산업용로봇제품의해외시장진출이활발하게이루어지고있는것으로분석 [ 인간친화형협동로봇관련무역현황 ] ( 단위 : 천달러, %) 구분 CAGR 수출금액 155, , , , , 수입금액 117, , , , , 무역수지 38,029 53,272 35,175 93,741 54, 무역특화지수 * * 무역특화지수 = ( 상품의총수출액 - 총수입액 )/( 총수출액 + 총수입액 ) 으로산출되며, 지수가 0 인경우비교우위는중간정도이며, 1 이면완전수출특화상태를말함. 지수가 -1 이면완전수입특화상태로수출물량이전혀없을뿐만아니라수입만한다는뜻 * 출처 : 관세청수출입무역통계 HS-Code(6 자리기준 ) 활용 55
64 기술개발테마현황분석 다. 기술환경분석 (1) 기술개발트렌드 연구개발동향 안전한인간로봇협동작업지원 직관적인교시지원을통한쉬운사용 신기술과의융합과스마트제조지원 인간로봇협동작업지원을위한안전기술 인간친화형협동로봇이사람과작업영역을공유하는이상접촉이나충돌등의위험은항상있으므로이를충분히고려하여독자적인안전설계를기반한로봇개발 Universal Robots은인간과안전하게협력할수있는양산로봇으로는최초로인간친화형협동로봇을출시하고폭스바겐과닛산등의생산라인에투입 협동로봇의가반하중을한정하는이유는대상물이무거운작업일수록사람과부딪혔을때위험성이높아지기때문으로모터출력이크면충돌시발생하는작은힘을검출하기어려움 - YASKAWA는독자적인분해능이우수한힘센서를개발하여가반하중 35kg의협동로봇 CR-35iA를제품화 다수의협동로봇이사람과의접촉감지에힘센서를사용하고있는데, Seiko Epson은수정압전방식의힘센서를개발함 - 수정압전방식은기존의정전용량식이나 Strain Gauge와비교하여강성이높기때문에미세한디바이스의변형을토대로 0.1N의작은힘을검출할수있음 Liferobotics는로봇에서팔꿈치에해당하는부분을제거하여작업자가로봇의움직임을예측하기쉽도록함 - 로봇의팔시작부분과지주사이에있는신축부를주름상자처럼만들어팔을앞으로뻗거나뒤로당기기용이한구조로만들어안전성을향상 쉽고편리한사용을위한직관적인교시기술 시스템통합업체에서시스템을구축하더라도사용자가간단히티칭하거나변경해야하는경우가많으므로대부분의협동로봇이암을직접움직여동작포인트를지정하는직접교시기능을지원 Universal Robots은누구나사용할수있는로봇을컨셉으로시스템통합업체에의존하는것이아니라사용자스스로티칭할수있다는모토로편리한인터페이스제공 FANUC은핸드가이드에서직접조작하거나직접티칭할수있는엔드이펙터조이스틱타입의장치를제공하여빠른시간내에셋업이가능하도록지원 ABB의 IRB 협동로봇도직관적인운용과직관적인교시를위해손목부분에장착된티칭장치를이용하여임의의위치로가이드함으로써프로그램을완료할수있도록인테페이스지원 56
65 인간친화형협동로봇 대부분의협동로봇제조사들은일반적인작업자도쉽고편리하게로봇을티칭할수있도록하는 교시장치나비프로그래밍티칭인터페이스제공 신기술의융합과스마트제조지원 머신러닝, 딥러닝등인공지능기술의도입, 가상현실및증강현실을통한원격로봇제어와제조공정트레이닝, 빅데이터및산업용사물인터넷적용으로스마트제조지원경향나타남 DENSO WAVE는가상현실기술과딥러닝기술을기반으로 VR HMD와모션센서장치를가진사용자의조정에의해양팔멀티모달 AI 로봇을제어할수있는기술시연 ABB는 RoboStudio + Virtual Reality 컨셉으로가상현실을이용한자동화방안을제시 - VR HMD를착용하고가상의환경에서신발제작시연 3D 비전을이용한빈피킹, 비주얼서보카메라를이용한고속트래킹, 2D 비전과인공지능기술을이용한물체인식및파지동작의티칭리스화등다양한신기술을협동로봇에적용시도 사람과유사한양팔로봇으로접근 일부로봇제조사는사람과유사한동작을목표로 2개의암을가진양팔협동로봇을개발 - 양팔형은단팔형에비해팔이차지하는설치면적이작아도되므로활용방법에따라서공간절약이가능 ABB는양팔협동로봇 IRB YuMi를출시 - YuMi는비전시스템, 그리퍼, 터치반응기술을채택한양팔로봇으로유연하고민첩한작업환경을요구하는애플리케이션에적합 Rethink Robotics는 SEA 구동기를기반으로제작한양팔형협동로봇 Baxter를출시 - 별도의프로그래밍작업이나통합작업없이도사용가능하도록제공 KAWADA는휴머노이드형양팔로봇 NEXTAGE의보급을위해 GLORY, THK, HITACHI 등의업체와제휴해다양한제조현장에적용하기위한협력강화 산업현장적용에서의유연성확대 인간친화형협동로봇은다품종소량생산에대한대응이나작업내용의변경또는활용방법이변해도적용할수있다는장점을가지며, 향후보다높은유연성과확장성요구에대응필요 Rethink Robotics의 Sawyer는제어소프트웨어를업데이트함으로써로봇의기능을수시로확충하고있음 년 3월에는암말단부카메라로작업의방향을인식하여피킹하는기능이나로봇의동작에관한데이터를실시간으로출력하는기능등을추가함 Kawasaki Heavy Industries와 duaro와 ABB의 YuMi 두협동로봇의협업적용등을통해, 다양한공정적용사례연구와협동로봇의안전문제에대한협력강화 57
66 기술개발테마현황분석 (2) 기술환경분석 4차산업혁명과로봇산업발전방안 산업통상자원부는주력산업고도화의핵심요소이자미래먹거리산업인로봇산업이 4차산업혁명에따른제조업혁신에새로운활로를열어줄것이라고전망하고, 스마트공장보급 확산에따른맞춤 유연생산과속도경쟁에대응하기위해서는첨단제조로봇의적극적인활용이필요하다고강조 로봇은해외진출한우리기업의생산공장이돌아오는리쇼어링 (reshoring) 을촉발하여제조업의새로운도약과국내일자리창출에중요한역할을할것으로기대 - 리쇼어링 : 기업이생산기지를인건비가저렴한국외로이전하는오프쇼어링 (offshoring) 의반대말로, 국외로생산기지를옮긴자국기업이다시국내로돌아오는현상을일컬음 로봇산업이새로운수출산업으로성장할수있도록시장창출과제도정비를통하여수요기반을강화하고, R&D 투자와인력양성, 인프라조성등을통해로봇산업의역량강화와전문기업육성을적극추진 수요기반강화 산업통상자원부는스마트공장보급과연계하여로봇잠재수요가큰기업을발굴하여첨단제조로봇의수요창출을촉진하고, 로봇활용을통한스마트공장의고도화도확산시켜나갈계획임 - 보급 확산사업을통해스마트공장솔루션을이미구축한기업중로봇공정을적용할수있는기업들을발굴하여첨단제조로봇들을투입하는시범프로젝트를 2018년까지 20개추진후, 효과가검증된업종들을중심으로 2019년이후본격확산시켜나갈예정 서비스로봇시장확대를위해기본적내수기반이갖춰져있고성장잠재력이큰무인이송, 의료재활, 소셜, 사회안전로봇을중심으로공공수요를적극발굴 년까지 80개프로젝트추진을통해선도시장을창출하고사업화적용실적을확보할수있도록지원 로봇안전을위한개발가이드라인과사고대응기준을업계와공동으로마련하고, 활용확대방안을관계부처와협의하는등시장활성화를위한선제적제도정비추진 공급역량강화 로봇전문기업육성을위해기술력과산업화잠재력을보유한로봇기업들의부설연구소를 첨단로봇상용화연구센터 로지정하여민관공동으로 1,000억원이상을투자하고, 2020년까지혁신적로봇신제품을 20개이상개발및출시지원 휴머노이드로봇연구센터를설치하여고속 고출력휴머노이드플랫폼, 보행 조작성능고도화에필요한핵심요소기술개발등세계최고수준의기술력을확보하고, 전문연구인력양성을추진하며, 중소 중견기업이필요로하는현장전문인력양성을위한맞춤형프로그램확대 모터, 감속기, 제어기등로봇부품의국산화를위해로봇핵심기술개발을집중지원하고, 로봇 R&D 지원방식도혁신하는등재원집중투입 상용화기술과원천기술개발을차별화하여전략적으로지원하고, 창의적아이디어경쟁을통해성과를극대화할수있도록임무수행형과제도입 58
67 인간친화형협동로봇 로봇산업클러스터 로봇산업의성장및시장진입을위해서는인프라조성, 상용화 R&D에대한체계적정부지원필요성에따라로봇산업클러스터조성 기업의장비활용교육및설계지원을통해제품기획부터제품검증까지전반과정지원을위한로봇혁신센터와로봇기업의시제품제작지원및신뢰성평가지원을위한로봇협동화팩토리구축 로봇혁신센터, 로봇협동화팩토리, 표준시험인증센터에로봇설계 해석 디지털검증 SW, 시제품 시작품가공제작장비, 성능시험평가및품질인증관련장비구축 로봇및로봇융합기술분야의성공적인창업활동을위해인프라및지원프로그램을제공함으로써창업자및창업초기기업의안정적인창업및성장지원 의료, 사회안전, 중소제조등의특화분야를중심으로생산공정자동화기술, 부품모듈상품화기술, 킬러애플리케이션기술개발지원 급격한기술변화에대응하기위한다양한정부지원정책추진 제조업생태계를혁신하고주력산업경쟁력제고를꾀하기위해 ʻ제조업혁신 3.0 전략ʼ을추진하고제조업공장 1만개의스마트화를추진 ( , 산업통상자원부 ) ICT 기술융합을바탕으로신산업발굴및일자리창출을위한 미래성장동력종합실천계획 을수립 ( , 과학기술정보통신부 ) 9대국가전략프로젝트 를선도프로젝트로선정하여미래성장동력의조기가시화를위한정책적지원강화 ( , 과학기술전략회의 ) 제4차산업혁명에대응하여지능정보기술확산에따른경제, 사회의미래변화상을예측하고, 바람직한지능정보사회실현을위하여국가차원의 지능정보사회중장기종합대책 수립 ( ) 로봇산업발전전략 ( ) 에기반하여첨단로봇공급역량을강화하여로봇의新시장진입을지원하고, 4차산업혁명흐름에따라인공지능응용산업화연구개발확대와차세대제조로봇을통한스마트공장연계연구개발등을추진 산업통상자원부는 4차산업혁명이가속화함에따라스마트공장구축을통한맞춤형유연생산체제로의전환이필수적이라고보고스마트공장보급목표확대등을포함한 스마트제조혁신비전 2025 발표 ( ) 관계부처합동으로 2017년지능형로봇실행계획발표 ( ) - 로봇핵심기술확보, 전문인력양성, 융합생태계조성등국내로봇산업공급역량강화기반조성과제조로봇을활용한스마트고장고도화, 서비스로봇공공수요발굴등유망제조로봇 서비스로봇에대한수요기반확충추진 59
68 기술개발테마현황분석 3. 기업분석 가. 주요기업비교 해외업체 머니퓰레이터로봇플랫폼의글로벌대표기업은 Rethink Robotics, Universal Robots, KUKA, ABB, Yaskawa, Denso, NEC, Matshshita Electric, FANUC, Kawasaki, Nachi, 하모닉, NEGUART 등으로제조용로봇, 구동기, 감속기개발및제조 인간친화형협동로봇분야에서 Rethink Robotics, Universal Robots, KUKA LBR iiwa 로봇, ABB 의유미로봇이인간과의협동에가장최적화된로봇으로평가 스웨덴의 ABB는최초의첨단제조용로봇생산기업으로글로벌시장점유율 1위이며, 일본야스카와전기는세계첨단제조용로봇시장의선두주자로지능형제조용로봇뿐만아니라인버터, 서보모터, 모션컨트롤러등을생산하고있으며공장자동화에필요한자동화설비를포함하는생산시스템제작기업 국내업체및기술동향 국내로봇생산기업들은내수시장이한정되어있어서보모터, 감속기, 제어기등과같은 핵심부품소재의국산화비율이저조하며, 국내대표기업은모터넷인터내셔날, 에스피지, 현대중공업, 로보스타, DST 로봇, 로보테크등이대표기업 현대중공업등대표기업을중심으로협동로봇의개발이진행중이나, 선진국에비하여초기 상태에머물고있는실정임 한국기계연구원에서는양팔로봇개발과제를통하여인간과로봇이공간을공유하는협동로봇플랫폼을개발하였음 작업공간을축소하기위하여양팔로봇을도입하는것이전자산업을중심으로필요성이대두되고있으며, 또한인간과로봇이작업장을공유하는상황에대처하기위하여안전성을확보하는것이필수적임 본과제에참여한전자부품연구원에서는관절에설치가능한힘센서를설치하여충돌발생시에최소한의시간내에로봇의동작을변화시켜서충격력을최소화하는기술을개발하였음 KIST 에서는능동안전관절을개발하여, 로봇이지정된작업을수행중에충돌을감지하여 로봇을정지시키는기술을개발하였음 60
69 인간친화형협동로봇 고려대에서는수동안전관절및능동안전관절을개발하여, 일정수준이상의충격이로봇에 가해지는경우에자동으로관절의힘이전달되지않도록하는기술과아울러로봇의동작에 따라서관절의힘을제한하는기술을개발하였음 경희대에서는머니퓰레이터와사람과의충돌을시험하여정적충돌시의신체부위별통증 한계치, 동적충돌시에상해발생상황을연구하고있으며, 이에따른충돌안전지수를 개발하고있음 세종대에서는이동로봇과사람과의충돌을시험하여동적충돌시의 1 차충돌및 2 차충돌로 인한상해발생에대한연구를진행하고있으며, 또한착용식로봇의피부손상발생에대한 모델을연구하고있음 국내중소기업사례 뉴로메카는최근산업용로봇분야에서도가장주목받고있는협동로봇기업, 2013년설립된기업으로안전문제와관련해센서없이알고리즘만으로도사람이로봇과충돌했을때충격을받지않게할수있는핵심기술을개발해자체보유, 뉴로메카는최근협동로봇시장의폭발적인성장세에따라 2020년까지 2,000대의협동로봇을판매, 매출 1,000억원을목표로하고있음. 올해상반기에가반중량 5kg의협동로봇양산을시작으로하반기에는 7kg의신제품도출시계획, 2018년에는중대형급인가반중량 13kg의협동로봇과대당만불대의저가형협동로봇시장에서글로벌 No.1을목표로부상중인기업 로보테크는직교좌표로봇, 스카라로봇, 겐트리로봇, 수직다관절로봇, 로봇콘트롤러, 모션콘트롤러, 서보드라이버, 그리퍼, 스위블등 100 여종에달하는그주변기기와각종라인시스템을개발하여국내유수기업에공급. 또한해외에서도경쟁력을확보중이며, 공장자동화를위한산업용로봇의머니플레이터, 컨트롤러, 무인화장비등의연구개발진행, 산업용로봇분야에서 10년이상의개발경험을보유한기업 민트로봇은다관절로봇의가격을높이는주요요소부품인감속기와모터를대체하면서도비슷한성능을유지할수있는부품을자체적으로개발하여독자적인부품기술을보유, 국내중소기업들이효율적인비용으로제조용로봇을구비할수있도록가격대비성능이뛰어난제조로봇을공급하는산업자동화시스템전문 3년차스타트업기업임. 공간활용이나처리속도면에서우위를보이는다관절로봇을주력, 병렬구동을활용한중공 ( 中空 ) 관절모듈 ' 할로인트 (Holloint)' 는가장주목받는제품, 할로인트이외에도로봇다관절플랫폼인 MR-6도좋은반응을얻는중 오토파워는 2014년출시한산업용델타로봇내수판매와현장적용경험을기반으로중국등해외시장공략, 산업용델타로봇은독일, 미국, 일본등몇몇선진국기업만이개발보유하고있는최신로봇으로 3차원공간에서 X, Y, Z 세축으로움직이며상품이송과포장 부품조립작업수행, 오토파워는 5년여연구개발 (R&D) 끝에산업용델타로봇국산화에성공했고, 기존의수입로봇시장을대체하며산업용로봇강소기업으로자리잡고있음, 특히국내최초로인간과협업이가능한 Collaboration Robot 제품인 OPTi 시리즈를양산, 판매하고있음 61
70 기술개발테마현황분석 [ 주요중소기업비교 ] ( 단위 : 백만원,%) 국내업체자산총계매출액 매출액증가율 영업이익율당기순이익율 R&D 집중도 ( 주 ) 뉴로메카 1, ( 주 ) 로보테크 8,121 11, ) ( 주 ) 오토파워 9,270 3, ) 2015 년 R&D 집중도 62
71 인간친화형협동로봇 나. 주요업체별기술개발동향 (1) 해외업체동향 노스롭그루먼 머니퓰레이터모바일로봇 방위산업체, 항공우주 전자시스템 정보시스템기술서비스등에주력함 리씽크로보틱스 휴머노이드산업용로봇머니퓰레이터 산업용휴머노이드백스터개발사 중소기업시장이타겟임 아뎁트테크놀러지 산업용로봇머니퓰레이터모바일로봇 전자 통신 가전 제약 식품가공 자동차부품산업과관련된로봇을설계 제조함 허니비로보틱스 산업용로봇머니퓰레이터모바일로봇 우주로봇및차세대항공우주시스템개발, 1990 년 로보텐터 라는로봇바텐더를개발함 UCL 로보틱스 산업용로봇머니퓰레이터모바일로봇 가스공급설비와에너지관련기업들에게로봇기술을검사 유지보수장치및서비스제공함 63
72 기술개발테마현황분석 (2) 국내업체동향 뉴로메카 2013년설립된뉴로메카는스마트로봇및스마트팩토리를지향하는사물인터넷 (IoT) 기반의로봇서비스를구현하기위한하드웨어, 소프트웨어통합솔루션을제공하는업체이며, 최근협동로봇시장의폭발적인성장세에따라 2020년까지 2000대의협동로봇을판매, 매출 1000억원을목표로하고있고, 대당 1만달러정도의저가형협동로봇시장점유율확대에집중 제품군으로는스마트커넥티드로봇기반의저가형협동로봇인디 (Indy) 및 HRI 인터페이스, 필드버스기반의실시간임베디드리눅스기반로봇제어기, 사물인터넷서비스를위한개방형임베디드게이트웨이및센서 / 구동기시스템, 로봇시뮬레이션및제어소프트웨어등 오토파워 2009 년한국기계연구원과양팔로봇을연구하며 OPTi 의개발을시작했으며, 중공형감속기와모터, 엔코더, 브레이크를개발하며제어기를제외한나머지모듈과하드웨어기술력을확보 푸른기술 제조분야에서 20년의연륜과노하우를갖고있는푸른기술은 2012년부터로봇사업을추진하고 있으며, 2013년고려대지능로봇연구소로부터로봇팔기술이전을받은이후산업용 7축로봇 다중관절및시각지능을이용한응용시스템을개발하고취약공정로봇보급사업에적용 이더캣 기반 BLDC 모터 드라이버 (400W급) 및 PC기반 로봇 제어기 개발에 이어 국제 안전인증규격을 준수한 반복정밀도 0.1mm, 가반 하중 15kg급의 6자유도 협동로봇 기술개발 사업을주관중 민트로봇 할로인트 (Holloint) 는고가의요소부품대신보급형로봇관절모듈을사용해개발하였고, 기존 협동로봇보다 2 배이상저렴한협동로봇 MR-6 를개발 제작 한화테크윈 한화테크윈은 40여년간쌓은정밀기계가공기술과제어기술, 영상분석및 SW 기술과더불어무인감시경계로봇, 자율주행차량등다양한로봇관련프로젝트수행경험을기반으로협동로봇사업을진행중 한화테크윈이가장먼저출시한 HCR-5는 6축다관절로봇으로작업반경 915mm, 반복정밀 0.01m, 가반중량 5kg의협동로봇으로안전성, 사용편리성, 유연성이강점 두산로보틱스 협동로봇하드웨어와소프트웨어를자체개발 비전문가도손쉽게설치및프로그래밍할수있도록애플리케이션방식으로프로그램을구현 64
73 인간친화형협동로봇 4. 기술개발현황 가. 기술개발이슈 국내기업의협동로봇시장진출 ( 한화테크윈 ) 국내기업최초로협동로봇 (HCR-5) 출시하여산업용로봇시장진출 ( 17.3월) - Payload 5kg의6축다관절로봇, 작업반경915mm, 반복정밀도 ±0.1 mm 구현 - 사용자친화적디자인, 간단한프로그래밍, 경량화설계기법적용 - 충돌을감지하고자동으로정지하는기술 (Collision Detection) 을활용하여작업자의안전성확보 협동로봇의가장큰이슈는안전 (Safety) 안전펜스나안전지대구성없이로봇과나란히, 또는로봇과사람이부딪히면서도작업이가능해야함 최근 ISO/TS 협동로봇안전요구조건이확정되면서정체된산업용로봇시장에협동로봇시장이활기를불어넣을것 국내시장에대한글로벌협동로봇제조사들의적극적인공략진행 ( 유니버설로봇 ) 최근국제인증기관 (TUV SUD) 으로부터어플리케이션인증을받아다양한분야의산업체에사용가능성확대 - 실험실, 의학및제약분야, 식품업계, 반도체생산업계등클린룸작업장을포함하고있는분야활용가능 - 산업용로봇에필수적인안전장치구성이필요없고, 프로그래밍개발도필요없으며, 이동이자유롭고, 유지보수에따른비용도없음 (KUKA 로보틱스 ) 고성능충돌감지알고리즘을내장한협동로봇국내출시 - 협동로봇 LBR 이바 (LBR iiwa) 는작업자와협업하는동시에초정밀로봇자동화를구현하는최적의솔루션을제공 (ABB) 비전시스템, 그리퍼, 터치반응기술을채택한양팔협동로봇출시 - 양팔협동로봇 유미 (YuMi) 의양팔움직임은사람의동작을모사한것이며유연하고민첩한작업환경을요구하는애플리케이션에적합 ( 화낙 ) 고중량협동로봇중심의제품라인을추진중 - 지난해국내시장에서첫번째협동로봇모델 CR35i를선보였으며자동차라인에서안전펜스구축없이작업자와나란히서서트렁크에예비타이어를장착하는실제모습을시연했음 ( 야스카와 ) 기존양팔형로봇에이어최근새로운협동로봇 HC10 출시 - 기존양팔형로봇인 Motoman SDA 10A는무거운가반중량과별도의컨트롤러가필요했으나, HC10은실리콘몸체를채용하고, 조작방식과프로그래밍이간단, 편리함 65
 협동로봇 LBR iiwa (ABB) 양팔로봇 YuMi ( 화낙 )")
")



74 기술개발테마현황분석 ( 유니버셜로봇 ) 소형협동로봇 UR3 ( 쿠카로보틱스 ) 협동로봇 LBR iiwa (ABB) 양팔로봇 YuMi ( 화낙 ) 협동로봇시리즈 ( 야스카와전기 ) 협동로봇 HC10 미래협동로봇기술의핵심은 적응적사고제어 BCI(Brain-Computer Interface) 라는신경기술은장애인들이생각만으로로보틱스보철도구를작동하는데활용되고있으며미래에는작업자가로봇을제어하는데 BCI 기술이적용될전망 MIT는최근리싱크로보틱스 (Rethink Robotics) 의협동로봇인 백스터 를활용해인간관찰자의뇌에서발생하는이상패턴인 ErrP(Error-related Potential) 를학습하는기술을개발 - 로봇이실수할때발생하는인간관찰자의뇌파 (EEG:Electroencephalogram) 인 ErrP 를읽어로봇의실수를교정할수있도록함 66
75 인간친화형협동로봇 나. 특허동향분석 인간친화형협동로봇특허상주요기술 주요기술 인간친화형협동로봇과관련된기술은로봇구동알고리즘및제어, 로봇시스템, 안전성검증및시험평가기술이있으며, 로봇구동알고리즘및제어에대한기술은로봇의동작및이동반복 / 재현기술, 인체동작해석 / 보정 / 보상기술, 안전구동제어기술로구분됨. 또한로봇시스템에대한기술은기구개발및설계기술, 센서시스템기술, 사용자인터페이스개발기술, 저장장치기술로구분되며, 안전성검증및시험평가에대한기술은충돌평가기술, 위험성예측및모니터링기술, 안전성검증기술로구분됨 분류요소기술설명 로봇구동알고리즘및제어 로봇의동작및이동반복 / 재현기술 인체동작해석 / 보정 / 보상기술 안전구동제어기술 기구개발및설계기술 데이터를처리하여반복 / 재생하는알고리즘또는제어방법 협업을위한사람의인체동작해석, 협업을위한보정, 보상기술 인간과로봇이작업함에있어안정적으로구동하기위해로봇을제어하는기술 로봇의기구적구성및다축관절에의한자유도증가를통한좁은공간에서작업, 넓은작업을가능하게하는설계기술 로봇시스템 안전성검증및시험평가 센서시스템기술 사용자인터페이스개발기술 저장장치기술 충돌평가기술 위험성예측및모니터링기술 안전성검증기술 인간과로봇, 이동로봇과장애물간의충돌등을감시하는센서시스템 인간친화형편의성향상을위한인터페이스기술 협업을사전에필요한정보기술의저장과주요작업에관한 ( 향후작업개선등을위한 ) 로그저장기술 인간과로봇, 이동로봇과장애물간의충돌시상해를유발시키는다양한요소에대한평가 인간과로봇의충돌및위험성을예측하고, 근접거리를실시간으로모니터링함으로써, 로봇의최대속도제한등의안전기능에반영하는기술 인간과로봇이근접거리에서작업함으로써발생할수있는위험상황에대한위험도평가를수행 67
76 기술개발테마현황분석 세부분야별특허동향 주요기술별국가별특허동향 인간친화형협동로봇에대한요소기술별주요국가별특허정보데이터입수하였으며, 최근 10 년간의특허데이터를비교분석함 분류요소기술한국미국일본유럽계 로봇구동알고리즘및제어 로봇의동작및이동반복 / 재현기술 인체동작해석 / 보정 / 보상기술 안전구동제어기술 기구개발및설계기술 로봇시스템 센서시스템기술 사용자인터페이스개발기술 저장장치기술 안전성검증및시험평가 충돌평가기술 위험성예측및모니터링기술 안전성검증기술 합계 383 1, ,622 국가별요소기술별특허동향에서는센서시스템기술이다른기술들에비해특허출원건수가가장많았으며, 그다음으로는로봇의동작및이동반복 / 재현기술, 저장장치기술및안전성검증기술이특허출원건수가많았음 센서시스템기술에서는미국이가장많은출원량을보유하고있으며, 한국이상대적으로적은출원량을보유하고있음. 다른모든요소기술에서도미국이가장많은출원량을보유하고있고한국이상대적으로적은출원량을보유하고있음 이에따라, 인간친화형협동로봇에대한기술은미국에서가장활발한연구가이루어지고있음을알수있음 68
77 인간친화형협동로봇 주요기술별출원인동향 세부분야 로봇구동알고리즘및제어 로봇시스템 안전성검증및시험평가 요소기술 로봇의동작및이동반복 / 재현기술 인체동작해석 / 보정 / 보상기술 안전구동제어기술 기구개발및설계기술 센서시스템기술 사용자인터페이스개발기술 저장장치기술 충돌평가기술 위험성예측및모니터링기술 안전성검증기술 기술집중도 FANUC 주요출원인 The Johns Hopkins Univ Bonutti Skeletal Innovations Leica Geosystems ROBERT BOSCH : 400건이상, : 300~399 건, : 200~299 건, : 100~199 건, : 100건미만 NIDEC SANKYO KUKA Roboter FANUC LTDROBERT BOSCH YASKAWA ELECTRIC KUKA Roboter GmbH Comau S.p.A. Siemens Aktiengesellschaft NABTESCO The Johns Hopkins Univ SICK Reis Group Holding The Johns Hopkins Univ SONY The Johns Hopkins Univ Bonutti Skeletal Innovations 한국전자통신연구원 ABB Research Siemens Aktiengesellschaft ROBERT BOSCH ABB Research Siemens Aktiengesellschaft FANUC ABB Research Reis Group Holding 국내특허동향 대학교, 공공연구기관중심의출원 ( 한국전자통신연구원, 한국과학기술연구소, 국방과학연구소등 ) 대학교, 공공연구기관중심의출원 ( 광주과학기술연, 전자부품연구원등 ) 대학교, 공공연구기관중심의출원 대학교, 공공연구기관중심의출원 대학교, 공공연구기관중심의출원 대학교, 공공연구기관중심의출원 일부중소기업의출원 대학교, 공공연구기관중심의출원 ( 한국전자통신연구원, 국방과학연구소등 ) 대학교, 공공연구기관중심의출원 ( 한국전자부품연구원, 한국전자통신연구원등 ) 대학교, 공공연구기관중심의출원 대학교, 공공연구기관중심의출원 ( 한국전자부품연구원, 한국전자통신연구원등 ) 69
78 기술개발테마현황분석 로봇구동알고리즘및제어분야주요출원인동향 로봇의동작및이동반복 / 재현기술에서는 The Johns Hopkins Univ가가장많은특허를보유하고있으며, 인체동작해석 / 보정 / 보상기술에서는 Leica Geosystems, 안전구동제어기술에서는 KUKA Roboter가가장많은특허를보유하고있음 국내에서는대학교및공공연구기관을중심으로로봇의동작및이동반복 / 재현기술, 인체동작해석 / 보정 / 보상기술, 안전구동제어기술에대한연구개발이이루어지고있음 로봇시스템분야주요출원인동향 기구개발및설계기술에서는 KUKA Roboter가가장많은특허를보유하고있으며, 센서시스템기술에서는 NABTESCO, 사용자인터페이스개발기술에서는 Reis Group Holding, 저장장치기술에서는 The Johns Hopkins Univ가가장많은특허를보유하고있음 국내에서는대학교및공공연구기관을중심으로기구개발및설계기술, 센서시스템기술, 사용자인터페이스개발기술, 저장장치기술에대한연구개발이이루어지고있음 안전성검증및시험평가분야주요출원인동향 충돌평가기술, 위험성예측및모니터링기술, 안전성검증기술 ABB Research가가장많은특허를보유하고있음 국내에서는대학교및공공연구기관을중심으로충돌평가기술, 위험성예측및모니터링기술, 안전성검증기술에대한연구개발이이루어지고있음 70
79 인간친화형협동로봇 인간친화형협동로봇분야의주요경쟁기술및공백기술 인간친화형협동로봇분야의주요경쟁기술은로봇의동작및이동반복 / 재현기술, 센서시스템기술, 저장장치기술이고, 공백기술은인체동작해석 / 보정 / 보상기술, 안전구동제어기술, 사용자인터페이스개발기술, 충돌평가기술위험성예측및모니터링기술로나타남 인간친화형협동로봇분야에서로봇의동작및이동반복 / 재현기술, 센서시스템기술, 저장장치기술이가장치열한분야이고, 인체동작해석 / 보정 / 보상기술, 안전구동제어기술, 사용자인터페이스개발기술, 충돌평가기술위험성예측및모니터링기술분야는아직까지출원이활발하지않은공백기술분야로나타남 세부분야요소기술기술집중도 로봇의동작및이동반복 / 재현기술 로봇구동알고리즘및제어 인체동작해석 / 보정 / 보상기술 안전구동제어기술 기구개발및설계기술 로봇시스템 센서시스템기술 사용자인터페이스개발기술 저장장치기술 충돌평가기술 안전성검증및시험평가 위험성예측및모니터링기술 안전성검증기술 : 400 건이상, : 300~399 건, : 200~299 건, : 100~199 건, : 100 건미만 71
80 기술개발테마현황분석 최신국내특허기술동향 분류요소기술최근핵심요소기술동향 로봇구동알고리즘및제어 로봇시스템 안전성검증및시험평가 로봇의동작및이동반복 / 재현기술 인체동작해석 / 보정 / 보상기술 안전구동제어기술 기구개발및설계기술 센서시스템기술 사용자인터페이스개발기술 저장장치기술 충돌평가기술 위험성예측및모니터링기술 안전성검증기술 정보수집 및 분석을 바탕으로 운동 경로를 생성하고, 로봇이생성된경로를반복해서추종하는기술 로봇디바이스를 통신이 가능하도록 하여 협업 동작을 식별하는기술 협업에서오차가발생할경우로봇의위치및동작정보를 보정하는기술 로봇의접촉력을 감지하여 이상 발생 시 초기 자세로 복귀하여경로를보상하는기술 로봇관절의각도방위감지, 외력측정을통해협업시 발생하는충돌로인한안전사고를억제하는기술 충돌을감지하고 자동으로 정지하는 기능 (Collision Detection) 에대한기술 형상기억합금및 중력보상 메커니즘을 가지는 설계 및 개발기술 위치제어기술과힘제어기술에따른관절토크센서 기술 ( 토크를쉽게제어할수있는센서 ) 복잡한프로그래밍 없이 사용 가능한 인터페이스 ( 터치식 작업지시또는직접지시기능 ) 기술 로봇의자율도수준을객관적으로판단하고, 로그정보를 저장및학습하는기술 외부로부터지령 위치, 속도, 가속도에 관한 정보를 입력받고로봇의현재위치, 속도등의정보를이용하여 충돌임계값을계산하는기술 입력된구간에서 로봇의 작동상태, 위치, 속도 등을 모니터링하고 작동상태를 실시간 검출하여 이상 동작을 조기에발견하는기술 사람과의접촉및충돌시안전성검증기술 최근국내에출원되는특허를통해기술동향을살펴보면, 인간친화형협동로봇에대한요소기술대부분은대학교, 공공연구기관을중심으로연구개발이이루어지고있는것으로나타남 인체동작해설 / 보정 / 보상기술에서는협업에서오차가발생할경우로봇의위치및동작정보를보정하는기술, 로봇의이상발생시초기자세로복귀하여경로를보상하는기술이개발되고있는것으로나타남 안전구동제어기술에서는로봇관절의각도방위감지, 외력측정을통해협업시발생하는충돌로인한안전사고를억제하는기술, 충돌을감지하고자동으로정지하는기능 (Collision Detection) 에대한기술이개발되고있는것으로나타남 72
81 인간친화형협동로봇 사용자인터페이스개발기술에서는복잡한프로그래밍없이사용가능한인터페이스기술, 충돌평가기술에서는외부로부터지령위치, 속도, 가속도에관한정보를입력받고로봇의현재위치, 속도등의정보를이용하여충돌임계값을계산하는기술, 위험성예측및모니터링기술에서는입력된구간에서로봇의작동상태, 위치, 속도등을모니터링하고작동상태를실시간검출하여이상동작을조기에발견하는기술이개발되고있는것으로나타남 중소기업특허전략수립방향및시사점 인간친화형협동로봇분야의공백기술분야는인체동작해석 / 보정 / 보상기술, 안전구동제어기술, 사용자인터페이스개발기술, 충돌평가기술위험성예측및모니터링기술로나타남 전세계적으로스마트팩토리가확대되고있는상황에서, 이를실현하기위한제조용로봇의수요가꾸준히늘고있고, 작업공간의활용성과작업공정변화및수정이없도록협동로봇에대한연구를진행하고있음 다만, 대부분의협동로봇은대기업에서제조하여판매하고있기때문에중소벤처기업의참여가높지는않은분야임 인체동작해석 / 보정 / 보상기술, 안전구동제어기술, 사용자인터페이스개발기술, 충돌평가기술위험성예측및모니터링기술은공백기술로나타났지만, 산업용로봇에적용되기위한구조개선과이에대한특허를확보하기위한전략이필요할것으로판단됨 향후중소기업은공백기술분야이면서대학교, 공공연구기관에서활발히연구개발을하고있는기술을이전받거나공동연구개발을진행하여제품화하는방향을우선적으로고려해볼수있을것으로사료됨 73
82 기술개발테마현황분석 5. 연구개발네트워크 가. 연구개발기관 / 자원 연구개발기관 인간친화형협동로봇분야주요연구개발기관 전자부품연구원 ( 김태근선임연구원 ) - 국내최초협업로봇용충돌감지센서-전장일체형경량구동모듈 ( 모터 + 토크센서 + 힘토크센서 ) 기술을개발해포장 / 부품조립등의산업현장에서작업자의안전구현 - 선진기술수준의고출력 BLDC 모터, 충돌감지를위한고감도토크센서및힘-토크 (FT) 센서개발 한국기계연구원 ( 원장임용택 ) - 양팔로봇개발과제를통하여인간과로봇이공간을공유하는협동로봇플랫폼을개발 - 작업공간을축소하기위하여양팔로봇을도입하는것이전자산업을중심으로필요성이대두되고있으며, 인간과로봇이작업장을공유하는상황에대처하기위하여안전성확보가필수적 로보스타 - 한국기계연구원과공동개발한무인생산로봇시스템및양팔로봇상용화에성공하였고, 이시스템은직교로봇, 6축수직다관절로봇, 병렬로봇, 양팔로봇등제조공정에필요한모든로봇을하나로엮어부품의공급 조립및최종제품검사까지수행가능 한국생산기술연구원융합생산기술연구소로봇그룹 ( 그룹장이동욱 ) - 필드로봇솔루션기술, 인지기반로봇지능및인간로봇상호작용기술, 중소제조업용로봇융합공정기술개발 한국로봇융합연구원 ( 원장박철휴 ) - 산업현장적용로봇의부품기술, 플랫폼기술개발및인간 로봇작업공조기술 ( 고출력경량로봇팔기술, 다양한바닥환경극복이동로봇플랫폼기술, 작업부하경감착용형로봇기술 ) 개발 한국과학기술연구원 ( 원장이병권 ) - 능동안전관절을개발하여로봇이지정된작업을수행중에충돌을감지한경우로봇을정지시키는기술개발 고려대학교 ( 지능로봇연구실송재복교수 ) 로보월드에서 7자유도의협동로봇인 KUDex-7D 와중력보상로봇등을소개 - 고려대는기존의협동로봇이나로봇팔에인공지능기술을결합하고, 학습기능을갖춘로봇기술개발중 경희대학교 - 사람과의충돌을시험하여정적충돌시의신체부위별통증한계치, 동적충돌시에상해발생상황을연구중이며이에따른충돌안전지수를개발중 74
83 인간친화형협동로봇 뉴로메카 - 산업용필드버스를기반으로한임베디드컨트롤러분야전문업체이며이전보다향상된산업용협동로봇 Indy7 을출시함 한화테크윈 - 하나의제어기로 2개의로봇운영이가능하여초기투자비절감가능 - 14년 11월삼성테크윈을인수하고, 이를바탕으로로봇무인화사업강화및의료로봇신규개발추진 DST 로봇 - 직각좌표로봇, 리니어로봇, 데스크탑로봇, 수평다관절로봇등의제조업용로봇뿐만아니라허큘렉스서보, 호비스로봇, 제니보로봇, 안내로봇등의서비스용로봇을제작및판매중 로보테크 - 직교좌표로봇, 스카라로봇, 겐트리로봇, 수직다관절로봇등산업용로봇뿐만아니라지능형로봇등을개발 연구개발자원 국가연구개발지원사업 중소벤처기업부 - 중소기업기술혁신사업 - 상용화기술개발사업 ( 구매조건부등 ) - 융복합기술개발사업 - 산학연협력기술개발사업 - 제품서비스기술개발사업 - 중소기업 R&D 역량제고사업 - 제품 공정개선기술개발사업 - 맞춤형기술파트너지원사업 - 산연전용과제 : 우수 R&D 인프라를활용한대표적인중소기업지원연구기관으로연구부서와중소기업간연계를통한기술지원은물론변리사, 산학연협력코디네이터, 기술거래사, 기술가치평가사등기술사업화관련전담인력이사업화사안마다관여해고품질비즈니스컨설팅제공 산업통상자원부 - 에너지 자원기술개발사업 - 전략핵심소재기술개발사업 - 신재생에너지기술개발사업 - 산업융합원천기술개발사업 - 로봇미래전략 (2013~2022) - 산업엔진프로젝트 (19대미래성장동력 ) - 사업화연계기술개발사업 ( 민간투자연계형등 ) 75
84 기술개발테마현황분석 국토교통부 - 건설기술연구사업 로봇산업정책협의회 - 창의적 도전적로봇연구촉진을위한풀뿌리지원프로그램 한국로봇산업진흥원 - 로봇산업클러스터 : 센터와장비를구축하고, 기술사업화촉진및로봇창업맞춤형지원과상용화기술개발지원을통해의료, 사회안전, 제조분야의로봇산업육성을목표로함 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등맞춤형기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원 ) - e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 지능형로봇테스트베드 ( 한국전자통신연구원 ) - 지능형로봇테스트베드에서로봇시험장비및인프라구축, 로봇시험평가방법개발및시험인증체계구축, 로봇시험평가방법개발및시험인증체계구축, 지능형로봇시험지원서비스제공 76
85 인간친화형협동로봇 나. 연구개발인력 인간친화형협동로봇분야는전자부품연구원, 한국기계연구원, 한국생산기술연구원, 한국로봇융합연구원, 한국과학기술연구원, 한국전자통신연구원, 고려대학교, KAIST, 로보스타, 뉴로메카등에서연구개발을진행하고있음 정부는개방형로봇산업생태계조성을위해인력양성측면에서多기술영역업무수행및 다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형 로봇전문인력양성추진 [ 인간친화형협동로봇분야주요연구조직현황 ] 기관전자부품연구원한국기계연구원한국생산기술연구원한국로봇융합연구원한국과학기술연구원한국전자통신연구원고려대학교 KAIST 로보스타 뉴로메카 77
86 기술개발테마현황분석 다. 기술이전가능기술 (1) 기술이전가능기관 인간친화형협동로봇의요소기술은크게로봇의동작및이동반복 / 재현기술, 인체동작 해석 / 보정 / 보상기술, 기구개발및설계기술, 센서시스템, 사용자인터페이스개발기술, 위험성예측및모니터링기술의총여섯개의분류로구분됨 기술이전이가능한기관은한국과학기술연구원, 한국전자통신연구원, 한국기계연구원, 울산 TP, 경상대학교, 군산대학교가있음 [ 인간친화형협동로봇요소기술연구조직 ] 분류요소기술기관 로봇의동작및이동반복 / 재현기술 양팔로봇간접교시기술을위한교시장치 양팔로봇의직접교시방법 한국전자통신연구원 한국기계연구원 인체동작해석 / 보정 / 보상기술 빠른움직임에도적용가능한 6 축힘센서자가보정방법 한국과학기술연구원 기구개발및설계기술 직교좌표로봇장치경상대학교 센서시스템 용접로봇을위한장애물승월용리프트 울산 TP 사용자인터페이스개발기술 GUI 기반의공장설비용무선인터페이스모듈 사용자중심의작업계획방법 한국전자통신연구원 한국과학기술연구원 위험성예측및모니터링기술 충돌회피및자율주행을위한센서융합기반하이브리드반응경로계획방법, 이를수행하기위한기록매체및이동로봇 군산대학교 78
87 인간친화형협동로봇 (2) 이전기술에대한세부내용 분류 세부내용 기술명 양팔로봇의직접교시방법 기술이전목적및필요성 최근조립라인에양팔로봇을적용하고자하는수요가늘고있으나, 교시절차가까다로워문제가되고있음 산업용로봇을교시하는과정은그자체가복잡도가높아시간이많이걸리는소모적인작업인데이는양팔동기화를고려하면양팔로봇에서는더욱어려우며, 이를해결하기위해교시자가로봇팔을잡고직접교시하는양팔직접교시가꼭필요함 현재의양팔로봇을교시하기위해서는한팔씩따로교시하여야함 한팔씩교시를한후양팔작업을위해서동기를맞추는복잡한과정을거침 조립공정및복잡공정에대한자동화솔루션으로양팔로봇에대한수요가높아지고있는반면, 양팔로봇교시를위한현실적인방법이없음 기술활용방안및기대성과 양팔로봇을직접교시함에있어서, 한쪽팔만을교시함에따라다른쪽팔에대해서도구속조건에따른연관동작의궤적이자동생성되도록함으로써, 직접교시시의양팔로봇의동기화문제를해결함 직관적으로는교시편의성을극대화시키고, 교시시간을단축시킴 (1/10수준) 기존양팔로봇의교시는양팔동작의동기화측면에서매우어려운작업인데, 본발명을이용하면사람이한쪽팔만을붙잡고직접교시하면나머지다른쪽팔에대하여미리결정된구속조건에따른연관동작의궤적이자동생성됨으로써, 종래양팔로봇의직접교시시발생하였던양팔의동기화문제가원천적으로해소되는큰효과가있음 또한, 직접교시과정에서사람이양팔로봇의두팔을동시에붙잡고교시하는과정에서발생되는불편함이 ( 한쪽팔만을교시하면되도록함으로써 ) 원천적으로해소되는큰효과가있음 더불어, 교시궤적이동작가능공간을벗어날경우, 동작가능공간의경계에정지해있는것으로교시궤적을변경처리하여기록함으로써, 잘못된교시궤적에의하여로봇팔이오동작할위험성을제거해주는효과가있음 세부문의 연구관련 한국기계연구원 로봇메카트로닉스연구실 79
88 기술개발테마현황분석 분류 기술명 세부내용 빠른움직임에도적용가능한 6 축힘센서자가보정방법 기술이전목적및필요성 기존에 Preloaded mass 추정및보정방식이모델기반또는다점보정방식 ( 여러위치에서추정후보정 ) 및정적보정이었던것과달리한점보정과동적보정 ( 움직이는상태에서추정및보정 ) 방식을가지고있음 가변물체추정및보정방식은모델기반 ( 미리모델링된물체만사용가능 ) 과정적보정 ( 정지된상태에서추정및보정 ) 하는것과달리모델없는물체도가능하고동적보정방식을가지고있음 추정을위한알고리즘에서기존에는 Kalman 필터등복잡한알고리즘과가속도센서등부가적센서를사용 ( 알고리즘구현을위한옵션 ) 했어야하지만, 본기술에서는 Wrench-mass 관계를이용한단순알고리즘을사용하고, 가속도센서등부가적센서를성능향상을위한옵션으로사용이가능함 기술활용방안및기대성과 본기술은힘센서를사용하는산업용로봇, 자동화장치, NC 머신등가공및 이동장치에사용이가능함 가변물체 조립, 이동 등이 필요한 작업, 가공 등 힘제어가 필요한 작업, 대상물체의 질량 정보가 불확실한 작업, 툴 체인지가 빈번하게 일어나는 작업에서사용이가능함 기존하드웨어에 대폭적인 수정 없이, 알고리즘에 대한 수정만으로 적용이 가능함 따라서빠른움직임에도관성의영향등을고려하여정확한위치를찾을수 있음 세부문의 연구관련 한국과학기술연구원 80
89 인간친화형협동로봇 분류 세부내용 기술명 직교좌표로봇장치 기술이전목적및필요성 본기술은직교좌표로봇장치에관한것으로, 더욱상세하게는가이드레일을따라이동하여대상물을이송시키는직교좌표로봇장치에관한것임 본기술은공간효율성이높고중량감소가가능하여안정적인고속이동이가능한직교좌표로봇장치를제공하는것에그목적이있음 기술활용방안및기대성과 본기술에따른직교좌표로봇장치에의하면, 프레임의일단에회전암이구비되어, 프레임이가이드레일을따라이동할때회전암이함께회전함으로써엔드이펙터의수직이동이가능함 또한회전암을구비함에따라설치시필요한높이를줄일수있어공간의활용성이좋음 자세제어부가 4절링크의구조로구동되어회전암의회전시에도엔드이펙터의방향을일정하게유지할수있어, 대상물을안전하고빠르게이송가능하며, 생산효율성이높음 더불어회전암에홀이형성되어중량을감소시킬수있으며, 용량이작은모터의사용이가능하여, 안정적인고속이동이가능함 따라서소형화로제작가능함으로유지보수에용이함 세부문의 연구관련 계약관련 경상대학교 경상대학교산학협력단 81
90 기술개발테마현황분석 분류 기술명 세부내용 용접로봇을위한장애물승월용리프트 기술이전목적및필요성 본발명은용접로봇을위한장애물승월용리프트에관한것임 기술활용방안및기대성과 선박용판넬블록의조립을위한용접시에한쌍의론지에의해형성된작업공간에서용접작업을완료한용접로봇을좌, 우이동되지않도록안전하게상승시켜이웃하는다른작업공간으로신속하게이동시킴으로써론지와용접로봇의충돌을방지하여용접로봇의파손을방지할뿐만아니라호이스트작동을위한전담작업인력이필요없으므로작업공수및시간을절감할수있도록하는용접로봇을위한장애물승월용리프트에관한것임 상기용접로봇을위한장애물승월용리프트는사각평판형상의하판의중앙부에설치되며일측하단부에는에어주입구와에어배출구를구비한자바라형튜브 ; 상기하판의상부면양측끝단부에설치된다수개의안테나형가이드 ; 및상기자바라형튜브와안테나형가이드의상부면에의해지지되도록설치된사각평판형상의상판으로구성됨 세부문의 연구및계약관련 울산 TP 울산기술이전센터 82
91 인간친화형협동로봇 분류 세부내용 기술명 사용자중심의작업계획방법 기술이전목적및필요성 환경변화에대응하면서여러사용자의요구사항을반영하여로봇의작업을계획하는방법 가변상황 ( 로봇이정해진작업뿐만아니라다양한작업에대해서작업계획을할수있도록 ) 에서작업수행을위한로봇작업계획기술개발 작업정책을설정하는정책설정기 (XML 기반으로정의하여사용 ) 를포함하는작업계획기로확장성이제공됨을통하여다양한가변상황에대한사용자의작업만족도평가로검증 기술활용방안및기대성과 실시간가변상황에적응적인작업계획방법 : 로봇의상태정보를작업계획의기준이되는정책속성으로반영하고, 사용자의정보및사용자의작업요구사항을반영하여작업을계획하며, 로봇이동작할때로봇의실제상황변화에맞춰실시간으로작업을재설정함으로써효율성및사용성, 적응성을제공하는작업계획방법 다양한작업관련정책을설정할수있는작업정책설정기지원 로봇에의한모든분야의작업계획기술에적용할수있음 세부문의 연구관련 한국과학기술연구원 83
92 기술개발테마현황분석 분류 기술명 기술이전목적및필요성 세부내용 충돌회피및자율주행을위한센서융합기반하이브리드반응경로계획방법, 이를수행하기위한기록매체및이동로봇 이동로봇의하이브리드반응경로계획방법은실제평면상에서이동로봇, 목표지점, 적어도하나의동적장애물의위치, 상기이동로봇과상기목표지점까지의거리및상기이동로봇의일정반경을포함하는정보를수집하는단계상기이동로봇및상기각동적장애물의위치를실제평면에서가상평면으로변환하는단계상기정보를파라미터로이용하여, 상기가상평면상에서상기이동로봇과상기동적장애물의충돌범위를추정하는단계및상기충돌범위를기초로, 상기실제평면상에서상기이동로봇의경로를계획하는단계를포함함 기술활용방안및기대성과 자율이동로봇센서시스템을단순화하면서도, 실시간으로변화하는동적외부환경에대한효율적인반응경로계획을제공할수있음 실제평면상에서이동로봇, 목표지점, 적어도하나의동적장애물의위치, 상기이동로봇과상기목표지점까지의거리및상기이동로봇의일정반경을포함하는정보를수집하는단계상기이동로봇및상기각동적장애물의위치를실제평면에서가상평면으로변환하는단계상기정보를파라미터로이용하여, 상기가상평면상에서상기이동로봇과상기동적장애물의충돌범위를추정하는단계및상기충돌범위를기초로, 상기실제평면상에서상기이동로봇의경로를계획하는단계를포함하고, 상기가상평면상에서상기이동로봇과상기동적장애물의충돌범위를추정하는단계는, 상기가상평면상에서상기이동로봇이상기동적장애물과충돌을회피하는좌우각각의이탈점을계산하는단계를더포함하는, 이동로봇의하이브리드반응경로계획방법임 이와같은해당기술에따르면, 자율이동로봇센서시스템의복잡성문제를해결할수있으므로, 이동로봇에프로세서와각종센서들을구성하는플랫폼셋업을단순화할수있음 특히, 자율주행이동로봇시스템구축시각종센서융합으로인해발생하는시스템의복잡성문제를키넥트 (Kinect) 와스마트폰기능의적용으로단순화시킬수있음 간편화된셋업방식은전문가가아닌일반인도사용이가능해지며, 자율주행에대한하드웨어구성시간을크게단축할수있음 연구관련 세부문의 군산대학교 계약관련 84
 데이터기반요소기술발굴 [ 인간친화형협동로봇분야키워드클러스터링 ] [ 인간친화형협동로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 클러스터 01 visual sensor 6~8 1.")
93 인간친화형협동로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 인간친화형협동로봇분야키워드클러스터링 ] [ 인간친화형협동로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 클러스터 01 visual sensor 6~8 1. Visual servoing of an articulated object based on stereovision 2. Cooperative multi-robot map merging using fast-slam 3. Dual arm robot 85
94 기술개발테마현황분석 No 주요키워드연관도수치관련특허 / 논문제목 1. Experimental study of a robust-adaptive controller design for 클러스터 02 robotic system 5~6 two cooperating RLED robot manipulators carrying a rigid payload 2. Performance and situation awareness effects in collaborative robot control with automation 3. Characteristics of middleware for networked collaborative robots 클러스터 03 power assist 3~4 1. A new generation of collaborative robots for material handling 2. POWER ASSIST APPARATUS, AND ITS CONTROL METHOD 3. Power assist apparatus, and its control method 1. Dynamic bandwidth management for teleoperation of 클러스터 04 collaborative robot 6~7 collaborative robots 2. A role-based language for collaborative robot applications 3. Collaborative Robot Manifold Tracker 1. Cooperative path planning and constraints analysis for 클러스터 05 industrial robot 3~4 master-slave industrial robots 2. Analysis of autonomous cooperative assembly using coordination schemes by heterogeneous robots using a control basis approach 3. INDUSTRIAL ROBOT 1. Distributed in-memory computing on binary memristor-crossbar for machine learning 클러스터 06 robotic arm 5~7 2. Co-robotic synthetic tracked aperture ultrasound imaging with cross-correlation based dynamic error compensation and virtual fixture control 3. APPARATUS AND METHOD TO CRADLE AND HEM PANELS AT AN ASSEMBLY-LINE STATION 1. COOPERATIVELY-CONTROLLED SURGICAL ROBOTIC SYSTEM 클러스터 07 arm assembly 5~7 WITH REDUNDANT FORCE SENSING 2. Robot arm assembly with harmonic drive 3. Robot arm assembly 86
95 인간친화형협동로봇 No 주요키워드연관도수치관련특허 / 논문제목 1. Distributed coordination strategy for target-enclosing operations 클러스터 08 cooperative control robot 3~5 by particle swarms 2. ehavior-based autonomous cooperative control of intelligent mobile robot systems with embedded Petri nets 3. ROBOT SYSTEM FOR CONVEYING ARTICLE IN SUSPENDED CONDITION 1. System for controlling a robotic device during walking, in 클러스터 09 frame structure 2~4 particular for rehabilitation purposes, and corresponding robotic device 2. C frame structure configured to provide deflection compensation and associated method 1. Solving simple target shipping tasks by a cooperative robot 클러스터 10 image capture 3~4 team. 2. COOPERATIVE MINIMALLY INVASIVE TELESURGICAL SYSTEM 3. Method of preparing a femur and tibia in knee arthroplasty 87
96 기술개발테마현황분석 (2) 요소기술도출 [ 인간친화형협동로봇분야요소기술도출 ] 분류요소기술출처 로봇구동알고리즘및제어 로봇시스템 안전성검증및시험평가 기구 제어 안전 로봇의동작반복 / 재현기술로봇의이동반복 / 재현기술인체동작해석 / 보정 / 보상기술안전구동제어기술기구개발및설계기술센서시스템기술사용자인터페이스개발기술저장장치기술충돌평가기술위험성예측및모니터링기술안전성검증기술다자유도로봇기구기술경량로봇기구기술유연개방형로봇제어기기기술사용자친화적교시인터페이스기술작업안전공간감지기술총돌감지및충격량최소화기술협동로봇안정요구조건적용기술 기술수요, 기술 / 시장분석, 전문가추천 기술수요, 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천 88
97 인간친화형협동로봇 (3) 핵심요소기술선정 [ 인간친화형협동로봇의핵심요소기술 ] 분류핵심요소기술개요 기구 다자유도로봇기구기술 경량로봇기구기술 다축관절에의한자유도증가를통한좁은공간에서작업가능및넓은작업반경확보기술 강하고가벼운소재와외부충격량감소설계, 로봇기구의포터블기능및안전성향상기술 제어 유연개방형로봇제어기기기술 사용자친화적교시인터페이스 모션제어기능과티칭팬던트기능을내재한스케일러블제어기와유연구조이식성을가지는개방형소프트웨어기술 쉽고직관적인사용자친화형교시장치기술및멀티모달휴먼인터페이스기술 작업안전공간감지기술 인간과로봇간의근접거리모니터링및작업공간분류에따른로봇구동제어기술 안전 충돌감지및충격량최소화기술 접촉또는비접촉충돌감지및대응, 충격력예측및최소화알고리즘기술 협동로봇안전요구조건적용 국제표준 (ISO , ISO/TS 15066, ISO PLd) 을충족하는안전협동로봇개발 89

98 기술개발테마현황분석 나. 인간친화형협동로봇기술로드맵 최종중소기업기술로드맵은기술 / 시장니즈, 연차별개발계획, 최종목표등을제시함으로써 중소기업의기술개발방향성을제시 90
99 인간친화형협동로봇 다. 연구개발목표설정 핵심요소기술별최종목표는아래와같이기술요구사항과연차별개발목표로제시함 [ 인간친화형협동로봇분야핵심요소기술연구목표 ] 분류핵심요소기술기술요구사항 연차별개발목표 1 차년도 2 차년도 3 차년도 최종목표 다자유도로봇기구기술 로봇기구자유도 6DOF 이상 6DOF 이상 6DOF 이상 다축관절을통한자유도확보 기구 경량로봇기구기술 기존대비무게감축도 - 10% 20% 로봇기구포터블기능및안전성향상 유연개방형로봇제어기기기술 유연구조이식성 확장가능설계 다중 IF 지원 개방형구조 유연하고확장성있는제어기기및개방형 SW 제어 사용자친화적교시인터페이스 교시자유도 3DOF 6DOF 6DOF 쉽고직관적인교시인터페이스제공 작업안전공간감지기술 인간 - 로봇간거리감지정확도 70% 80% 90% 작업자와로봇거리에따른로봇안전제어 안전 충돌감지및충격량최소화기술 최대허용충격력 150N 100N 50N 외부충격력감지기반안전확보 협동로봇안전요구조건적용 국제안전표준기준부합 - - ISO , ISO/TS 국제표준에부합한협동로봇개발 91
100 기술개발테마현황분석 라. 핵심요소기술심층분석 다자유도로봇기구기술 기술개발 필요성 로봇의기구적구성및다축관절에의한자유도증가를통한좁은공간에서작업, 넓은작업을가능하게하는설계기술이필요함 기술개발전략 협업을할수있는다관절암로봇 6 축구조및확장형관절을가지는로봇 No 명칭출원인 1 고온환경작업용 6 축수직다관절로봇경남대학교 2 협업로봇을이용한차량생산시스템및생산방법기아자동차 관련특허현황 3 확장형다관절휠구동식배관탐사로봇어셈블리부경대학교 4 로봇시스템및로봇장치 LIFE ROBOTICS 5 다관절형로보트 SONY 6 다관절암로봇형장치 FRAUNHOFER GES FORSCHUNG 적용가능분야 협업또는위험한지역에서정교한작업을수행하는로봇 관련기업 국내 : 기아자동차, 경남대학교산학협력단, 부경대학교산학협력단, 한양대학교산학협력단 해외 : LIFE ROBOTICS, SONY, FRAUNHOFER GES FORSCHUNG, MITSUBISHI HEAVY, HONDA MOTOR 92
101 인간친화형협동로봇 경량로봇기구기술 기술개발 필요성 소재, 외부충격량감소설계, 포터블, 안전성향상기술이필요함 단일구동부를이용해전체링크들을운동시킬수있는구조 기술개발전략 복합재료를이용하는로봇 불연속적격자구조와블록부품으로만들어지는구조 No 명칭출원인 1 경량화구조의포터블용접로봇대우조선해양 2 와이어구동기반경량로봇암장치전자부품연구원 3 경량전기로보트작동기 CBS Corportion 관련특허현황 액정표시장치용패널장착및탈착용더블암타입로봇에사용되는복합재료손목블록및이것이결합된더블암타입로봇 Bipedal Isotropic Lattice Locomoting Explorer: Robotic Platform for Locomotion and Manipulation of Discrete Lattice Structures and Lightweight Space Structures FABRICATING LIGHTWEIGHT SKIN SYSTEMS FOR LARGE SCALE ROBOTIC CHARACTERS 한국과학기술원 M a s s a c h u s e t t s Institute of Technology DANIEL REETZ 적용가능분야 경량화를위한로봇의외피또는골격 경량화를필요로하는기구구조 관련기업 국내 : 대우조선해양, 전자부품연구원, 한국과학기술원, 한국원자력연구원 해외 : Massachusetts Institute of Technology, RAYTHEON, DANIEL REETZ, Robotic Originals, CBS Corportion 93
102 기술개발테마현황분석 유연개방형로봇제어기기기술 기술개발 필요성 모션제어, 티칭펜던트, 스케일러블제어기, 유연구조이식성, 개방형소프트웨 어가필요함 기술개발전략 실시간제어가가능한 OPEN ARCHITECTURE CONTROL SYSTEM 기술 관련특허현황 No 명칭 출원인 1 System and method for remote control of unmanned vehicles Trevor O'Neill Institutul de 2 Mecanica Real time control method and device for robots in Solidelor al virtual projection Academiei Romane 3 자율이동시스템을위한개방형제어시스템아키텍처 프론트라인로보틱스 4 네트워크기반개방형서보드라이브시스템 한국산업기술대학교 5 System and method for localizing two or more moving nodes Robotic Research 적용가능분야 자동화공장에서사용하는제조로봇 관련기업 국내 : 프론트라인로보틱스, 한국산업기술대학교 해외 : Trevor O'Neill, Institutul de Mecanica Solidelor al Academiei Romane, Robotic Research 94
103 인간친화형협동로봇 사용자친화적교시인터페이스 기술개발 필요성 인간친화형편의성향상을위한인터페이스기술이필요함 복잡한프로그래밍없이사용가능한인터페이스 ( 터치식작업지시또는직접지시기능 ) 기술 기술개발전략 효율적으로로봇에대해서교시할수있는장치 역운동학해법을기초로해서다관절링크기구에대한교시데이터를작성하는 교시데이터작성장치 No 명칭출원인 1 힘 - 토크센서를이용한다자유도로봇직접교시장치 및그장치의작동방법 LIG 넥스원 2 원격단말기및이를이용한로봇교시방법삼성전자 관련특허현황 3 로봇시스템, 로봇교시방법및로봇교시장치 YASKAWA ELECTRIC 4 다관절링크기구의역운동학해법, 및이역운동학해법 을이용한교시데이터작성장치 KOBE STEEL 5 로봇교시장치한국기계연구원 6 로봇의직접교시및재생방법및이를구현하는로봇 제어장치 한국과학기술연구원 적용가능분야 로봇의작업을직접교시해야하는분야 극한환경에서작업을수행해야하는분야 관련기업 국내 : LIG넥스원, 삼성전자, 한국기계연구원, 한국과학기술연구원, 대구경북과학기술원, 유인프라웨이 해외 : YASKAWA ELECTRIC, KOBE STEEL, MITSUBISHI, TOYOTA MOTOR, SEIKO EPSON 95
104 기술개발테마현황분석 작업안전공간감지기술 기술개발 필요성 로봇작업의안전성을유지하기위해공간감지기술이필요하며, 이를위해 체적으로근접거리모니터링, 작업공간분류, 로봇구동제어기술이필요함 구 기술개발전략 통신부, 주제어부, 위치인식장치및데이터베이스 (DB) 를활용하는전략 라인스캐너와미리정해진작업공간의자료를활용하는기술 No 명칭출원인 1 이동형로봇의모니터링시스템마산대학교 2 이동로봇모니터링시스템, 및방법고려대학교 관련특허현황 3 실시간자기충돌및장애물회피 HONDA MOTOR 4 로봇안전시스템 DENSO WAVE 5 6 이동로봇의주행영역판별장치및주행영역판별방법적어도하나의공통영역을포함한각각의작업스페이스를가지는적어도 2대의로봇을제어하는방법 IHI AEROSPACE COMO SPA 7 레이저거리센서를구비한용접로봇및그의교정방법대우조선해양 적용가능분야 로봇청소기, 산업용로봇, 재난용로봇, 군사용로봇 관련기업 국내 : 모뉴엘, 삼성전자, 엘지전자, 에이스로봇, 대우조선해양 해외 : FANUC, LTDROBERT BOSCH, YASKAWA ELECTRIC, 샤오미 96
105 인간친화형협동로봇 충돌감지및충격량최소화기술 기술개발 필요성 인간과로봇, 이동로봇과장애물간의충돌시상해를유발시키는다양한요소에 대한대응기술이필요 외부로부터충격이가해지는경우외력이가해지는방향으로댐퍼링을발생시키는 기술 기술개발전략 충돌을감지하고자동으로정지하는기능 (Collision Detection) 에대한기술 외부로부터지령위치, 속도, 가속도에관한정보를입력받고로봇의현재위치, 속도등의정보를이용하여충돌임계값을계산하는기술 No 명칭출원인 1 인체상해평가를위한충돌시험장치경희대학교 2 충돌저감로봇한양대학교 관련특허현황 3 인간-서비스로봇충돌안전성평가시험장치 세종대학교 4 구동제어신호를이용한로봇충돌감지장치 사이보그-랩 5 METHOD AND APPARATUS FOR AUTOMATIC AND Siemens Industry EFFICIENT LOCATION GENERATION FOR Software COOPERATIVE MOTION 6 Robotic apparatus implementing collision avoidance scheme and associated methods Harris Corporation 적용가능분야 자동화공장에서사용하는제조로봇 관련기업 국내 : 기아자동차, 경희대학교, 한양대학교, 세종대학교, 사이보그 - 랩 해외 : KUKA Roboter, 5D Robotics, Siemens Industry Software, Harris Corporation 97
106 기술개발테마현황분석 협동로봇안전요구조건적용 기술개발 필요성 인간과로봇이작업함에있어안정적으로구동하기위해로봇을제어하는기술 기술개발전략 작업자의상태인식을통해로봇의안전성을조절하는기술 입력된구간에서로봇의작동상태, 위치, 속도등을모니터링하고작동상태를실시 간검출하여이상동작을조기에발견하는기술 No 명칭출원인 관련특허현황 1 작업자의감정상태의인식을통해협업로봇의안전성을조절하는방법및장치 한국전자통신연구원 2 로봇가디언모듈과이를이용한로봇안전보장장치및방법 경북대학교 3 로봇안전시스템 DENSO WAVE 4 산업용로보트의안전제어장치 NEW INDUSTRY RESEARCH ORGANIZATION 5 정지감시기능을가진로봇제어장치 FANUC 6 Safe path planning for collaborative robots X Development 적용가능분야 자동화공장에서사용하는제조로봇 관련기업 국내 : 한국전자통신연구원, 경북대학교, 숭실대학교, 충북대학교 해외 : DENSO WAVE, NEW INDUSTRY RESEARCH ORGANIZATION, FANUC, X Development, BRAGI, Ethicon 98
107 기술개발테마현황분석 착용형근력증강 웨어러블로봇
108
109 착용형근력증강웨어러블로봇 정의및범위 웨어러블로봇은인간의신체로부터생체신호를측정하여구동부를제어하며, 이로써착용자의신체능력을향상시키고자하는장치를의미 착용형근력증강웨어러블로봇은인체에부착된기구부를구동하여착용자의근력을보조하며, 다양한응용분야중에서도특히제조 / 안전 / 국방등분야에서의용도는큰시장성을가지는것으로전망되어전세계적으로개발경쟁이진행중정부지원정책 2018년 4차산업혁명신산업창출을위한산업기술 R&BD 전략미래시장중점투자분야에 AI 및로봇융합신기술발굴지원, 고령자건강증진기술등이포함 정부는재난현장대응기술을위한로봇개발계획을기획하였으며, 2014년재난대응과학기술역할강화 3개년실천전략에재난대응을위한장비탈부착식굴절로봇과개인방호를위한실시간위험감지수트, 근력강화수트등이포함 2015년정부는안전혁신마스터플랜과안전산업활성화방안의발표를통해범정부차원의재난 / 안전기술개발에대한정책수립하였으며, 이에따라국민안전처는산업연계형국가안전대진단추진기본계획에서 12대선도안전산업에재난대응로봇산업을포함 중소기업시장대응전략 강점 (Strength) ( 환경 ) 유연한산업구조 ( 기술 ) 우수한 IT 인프라 ( 정책 ) 산업지원정책수립기회 (Opportunity) ( 환경 ) 제조패러다임의변화 ( 기술 ) 기반기술연구 개발 ( 정책 ) 정부와업계의높은니즈 약점 (Weakness) ( 환경 ) 영세한산업구조 ( 기술 ) 핵심원천기술미흡 ( 정책 ) 산업계연계미흡위협 (Threat) ( 환경 ) 생산지원인프라부족 ( 기술 ) 글로벌업체와의기술격차 중소기업의시장대응전략 제조, 설계, 소프트웨어등의기존핵심요소기술역량을웨어러블로봇에접목하여신속한제품개발과사업화추진전략으로시장의요구에대응 작업자환경을고려하여현장에서의요구맞춤기술수요도출
110 핵심요소기술로드맵

, 국방용 ( 우 ) ] 스스로동작하는인간형태의로봇과별개로, 최근현실화되고있는인체착용형웨어러블로봇은인간의근력을향상시키는기능과부상이나장애의위험을방지할수있는안정성측면의기능으로인해폭넓은분야에서사용가능성이높아지고있음 인간의인지및판단능력은그대로사용하면서,")
111 착용형근력증강웨어러블로봇 1. 개요 가. 정의및필요성 웨어러블로봇은, 인간의신체로부터생체신호를측정하여구동부를제어하는장치를의미함. 이는착용자의신체능력을향상시켜주기위한장치이며, 최근생체인식기술이나초소형구동기술및경량소재등의발달로웨어러블로봇은점차현실화되고있음 웨어러블로봇의구동메커니즘은상지부와하지부로구분할수있으며, 두가지메커니즘을동시에지원하는형태도존재함 일반적인착용형근력증강웨어러블로봇은일반적인사람이무거운짐을들다가부상을입는것을방지하거나, 군인이오랫동안보행하는일을보조해주는등의용도로개발됨 [ 착용형근력증강웨어러블로봇의개발사례. 근로자용 ( 좌 ), 국방용 ( 우 ) ] 스스로동작하는인간형태의로봇과별개로, 최근현실화되고있는인체착용형웨어러블로봇은인간의근력을향상시키는기능과부상이나장애의위험을방지할수있는안정성측면의기능으로인해폭넓은분야에서사용가능성이높아지고있음 인간의인지및판단능력은그대로사용하면서, 근력등의운동능력을향상시키는웨어러블로봇기술은가까운시일내에구현가능한기술이면서현실에적용했을때사용범위가매우다양할것으로기대됨 착용형근력증강웨어러블로봇에서사용되는구동기관련한개발은세계적으로상당히많이 이루어져있으나, 최근에는보다유연한자세및중량지지보조를위한강성제어기술개발이 요구됨 착용자의도에따라동작되는로봇개발을위해인체동작의해석이필요함 다양한작업환경에서사용자의도파악을위해신체부착센서가사용되고있으나이러한센서들의 측정오차나분석의어려움으로인해기술개선이요구됨 103
112 기술개발테마현황분석 사용자맞춤형운동역학데이터를추출하기위하여 3 차원모션캡쳐기술의적용가능성이고려됨 착용자와로봇의상호작용이반영되어최적의보조력을내는것이기술개발의궁극적목표이며, 이를위한인체와로봇의상호작용이반영된동역학적시뮬레이션기술개발이우선요구됨 현재는로봇개발자와임상의사등의전문가들이수개월에걸쳐서보조력을조정하는과정이 필요함. 수많은사용자들을위한웨어러블로봇제조 / 생산을위해서는인체의근골격계 데이터가객관화 / 표준화되어이러한보조력맞춤과정이단축되어야함 104
113 착용형근력증강웨어러블로봇 나. 범위및분류 (1) 제품분류관점 웨어러블로봇은구동기, 기구부, 생체신호측정등의기반기술로구성되며그외에도 보행상태감지를위해족저압측정기술이필요함. 또한로봇과인체의상호작용으로 동작되는제품특성상로봇데이터와착용자데이터관리기술이별도로요구됨 [ 제품분류관점기술범위 ] 기술개발테마제품분류관점세부기술 모터및감속기기술 구동기기술 유압 / 공압등의큰힘을내기위한구동기술 높은착용성을위한차세대소프트구동기 기반기술 운동학정보측정기술 동작의도파악기술 위치, 자세, 속도, 가속도등의측정기술 힘정보측정기술 ( 구동력, 접촉력등 ) 뇌파 (EEG), 근전도 (EMG) 등의생체신호기반동작의도파악 조이스틱, 스마트폰등을통한수동입력방식 착용형근력증강웨어러블로봇 임베디드제어기술 실시간제어알고리즘과이를위한 RTOS 구현기술 장치드라이버및전원관리등의추가요소기술 족저압측정 지면반력측정위한압력측정기술 로봇데이터관리 관절각도및각속도, 관절토크, 족저압, 배터리잔량등 착용자데이터관리 생체데이터 신체데이터 맥박, 호흡량, 산소포화도, 근전도등 착용자나이, 성별, 신장, 몸무게등 ( 그외심리적데이터포함 가능 ) 105
114 기술개발테마현황분석 (2) 공급망관점 착용형근력증강웨어러블로봇은 4차산업혁명의핵심기반기술로주목을받고있음 공장근로자의작업지원을시작으로국방, 안전, 헬스케어, 엔터테인먼트에이르기까지웨어러블로봇의적용가능성은폭넓은시장적용가능성을가지고있음 인간의근력을향상시키는기술과더불어구동기반력으로착용자가힘을느끼도록해주는기술로발전하고있으며, 수많은사용자와폭넓은적용범위에확대적용하기위한데이터를축적하여개별제조사와사용자의개발기간단축과구매가격최소화를위한기술확보방향이제시되고있음 [ 공급망관점기술범위 ] 기술개발테마공급망관점세부기술 국방 주로무거운무기나짐을운송하거나장시간보행하기위한기술이요구되며, 강인한환경에서사용될수있도록높은강도와안전성을갖는설계가필요함 안전 소방, 원전등의재난상황에적용될수있는웨어러블로봇기술이요구되며, 사회안전전반에걸쳐도출되는요구에맞춤형기술개발이필요함 착용형근력증강웨어러블로봇 근로 헬스케어 작업자지원을위한웨어러블로봇기술은큰수요가있으며주로큰힘을내거나반복작업등을도와주는기술과근로자가작업중부상을입지않도록하는안전성관련기술로구분가능함 일상생활에서가벼운운동과자세교정등의역할이기대되며, 웨어러블로봇에부착된각종센서를이용한건강상태모니터링, 자세나보행의교정등의부가기능확장가능성이기대됨 노인및장애인을위한의료용웨어러블로봇기술은넓은범주에서헬스케어에포함될수있지만, 근력보조등의세부기술요소는이와차별화되는부분이많이존재함 엔터테인먼트 AR 이나 VR 등의기술을웨어러블로봇에접목하여엔터테인먼트시장진출을위한요소기술개발이요구됨. 현재시각정보수준만으로가상체험제품개발이이뤄지고있으며, 3~6 축구동하는의자에앉아서가속을느끼도록하는제품으로진전되고있음 웨어러블로봇은보다높은몰입감을느낄수있도록하는정밀힘제어기술을이용하여차세대엔터테인먼트제품의큰포텐셜을가짐 106
115 착용형근력증강웨어러블로봇 2. 외부환경분석 가. 산업환경분석 (1) 산업의특징 웨어러블로봇산업은모터와감속기관련산업과기구부제작을위한제조업뿐만아니라, 최근의소프트수트제작을위한신소재산업이나데이터측정및전송을위한 IT 관련산업까지모두포함하는광범위한융복합산업영역임 인체에서직접적용되는제품의특성상기능성을높이기위한개발과함께안전성이나유해성을확보하기위한장기간의연구가함께고려되어야함 일상생활에사용되기위하여사용자편의성과외관디자인등을모두고려해야하며, 주요선진국에서는이러한웨어러블로봇의개발을위해다양한분야의융합연구와기반환경조성을동시에추진하고있음 국내의웨어러블로봇관련한세계적인기술력을효과적으로활용하기위해서기존제조업이나 IT업등과의다양한융합기술추진전략이시급함 의료 / 서비스등의일부한정된분야에서만로봇산업이창출되었으나, 웨어러블로봇개발추세에따라급속도로확대된사업화방향이예견되고있음 주요선진국들의거대 IT기업과핵심기술력을갖춘연구그룹이나중소기업은매년새로운제품과기술을발표하고있음 우리나라의경우로봇관련한기술력있는중소기업들이새로운시장을열지못하여매출실적이매우저조하며, 제조업이나서비스업등의타업종으로이탈하려는경우가많음 (2) 산업의구조 착용형근력증강웨어러블로봇관련된후방산업은웨어러블로봇에사용되는주요핵심기술인모터및감속기제조, 생체신호측정관련센서, 로봇구동알고리즘및보조력제어등의기반기술관련산업 현재전량수입에의존하고있는고효율모터나하모닉드라이브감속기를국내개발하는시도와더불어, 이러한기존제품을웨어러블로봇에적용하기위한기구부하우징이나센서패키징등을통해부위별모듈화하는사업방향제안 복잡한연산을고속으로수행하는임베디드제어기와실시간 OS 기반의소프트웨어기술은기계나전기적인기반기술과함께필수요구되는요소임 많은사용자들로부터로봇과착용자의데이터를축적하여알고리즘개선이나안전성향상등의분석에적용하고자하는빅데이터관련기반기술이요구됨 107
116 기술개발테마현황분석 전방산업은국방, 안전, 근로, 헬스케어, 엔터테인먼트등으로구성 [ 착용형근력증강웨어러블로봇기술분야산업구조 ] 후방산업 모터및감속기제조, 생체신호측정관련센서, 로봇구동알고리즘및보조력제어, 임베디드소프트웨어, 데이터베이스구축 착용형근력증강웨어러블로봇기술분야 구동기, 운동학정보측정, 동작의도파악, 임베디드제어, 족저압측정, 로봇데이터관리, 착용자데이터관리 전방산업 국방, 안전, 근로, 헬스케어, 엔터테인먼트 108
![착용형근력증강웨어러블로봇 나. 시장환경분석 (1) 세계시장 ABI 리서치 ( 미국뉴욕 ) 에따르면웨어러블로봇시장은 2016 년 8,940 만달러에서 2021 년 4 억 7,390 억달러로연평균 39.6% 의성장을할것으로분석 [ 웨어러블로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 16 17 18 19 20 21 CAGR 세계시장 89.](/docs-images/93/112329278/images/117-1.jpg "4 124.8 174.2 243.2 339.5 473.9 39.6 * 출처 : ABI Research, 2015 * 출처 : ABI Research, 2015 [ 웨어러블로봇시장예측 ] IFR(International Federation of Robotics) 의 World Robotics 2017에따르면, 2016년세계로봇전체시장은규모는전년대비 13.")
117 착용형근력증강웨어러블로봇 나. 시장환경분석 (1) 세계시장 ABI 리서치 ( 미국뉴욕 ) 에따르면웨어러블로봇시장은 2016 년 8,940 만달러에서 2021 년 4 억 7,390 억달러로연평균 39.6% 의성장을할것으로분석 [ 웨어러블로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 세계시장 * 출처 : ABI Research, 2015 * 출처 : ABI Research, 2015 [ 웨어러블로봇시장예측 ] IFR(International Federation of Robotics) 의 World Robotics 2017에따르면, 2016년세계로봇전체시장은규모는전년대비 13.2% 성장한 203억 5900만달러에달함 세계로봇시장은제조용로봇산업이주류를이루고있으며, 개인서비스용로봇산업은가파른상승세전망 웨어러블로봇이주로포함되는전문서비스용로봇시장은 16년기준으로전년대비 6.5% 성장한 46억 7,400만달러로연평균 6.5% 의연평균성장률을나타냄 109
118 기술개발테마현황분석 [ 세계로봇시장매출액 ] ( 단위 : 백만달러 ) 구분 12 년 13 년 14 년 15 년 16 년 16/15 년 CAGR 제조용 8,496 9,507 10,196 11,162 13, % 11.5% 서비스용 4,860 5,365 6,174 6,826 7, % 12.9% 개인서비스용 1,224 1,704 2,134 2,229 2, % 36.8% 전문서비스용 3,636 3,661 4,040 4,597 4, % 6.5% 합계 13,356 14,872 16,370 17,988 20, % 11.1% * 출처 : World Robotics 2017(IFR, 2017 년 ) 서비스용로봇은의료, 물류, 필드로봇등전문서비스로봇중심으로증가세를보이며시장형성 세계서비스용로봇시장규모 (IFR, `17.9) : 의료로봇 16.1억불, 물류시스템로봇 9.9억불, 착유 목축등필드로봇 9.8억불, 엔터테인먼트로봇 9.8억불, 국방로봇 7.7억불등 [ 서비스로봇시장추이 ] ( 단위 : 백만달러 ) 구분 금액비중금액비중증가율금액비중증가율 Field Robotics 1,107 11% 984 9% -11% 1,104 8% 12% Logistic Systems 780 8% 992 9% 27% 1,133 8% 14% Medical Robotics 1,462 15% 1,611 14% 10% 1,833 13% 14% Defense Applications 1,038 10% 775 7% -25% 758 5% -2% Domestic Tasks 1,233 12% 1,558 14% 26% 2,012 15% 29% Entertainment Robots % 980 9% 0% 1,140 8% 16% Others 228 3% 331 5% 45% 412 5% 24% 합계 6, % 7, % 6% 8, % 16% * 출처 : World Robotics 2017(IFR, 2017 년 ) 110
119 착용형근력증강웨어러블로봇 (2) 국내시장 16 년말기준으로로봇산업총생산액은 4 조 4,903 억원으로, 전년도생산액 3 조 9,576 억 원대비 13.5% 증가 [ 국내로봇시장현황 ] 구분 ( 증감 ) 생산매출수출수입 ( 단위 : 억원, %) 비중 비중 비중 비중 제조 23,061 24,293 26,688 (9.9) 서비스 4,624 5,885 7,107 (20.8) ,671 25,831 27,009 (4.6) 6,916 3, ,694 6, ,834 4,391 (2.4) ( 9.1) ,464 1, ,020 6, ,098 1,046 (18.9) (47.2) (75.5) 12.6 전문 1,377 2,629 3,733 4, ,615 2,830 (42.0) (43.3) (129.4) (223.9) 11.1 개인 3,247 3,256 3,374 3, ,45 3,447 (3.6) ( 1.1) (11.0) ( 60.8) 1.5 부품 6,135 9,397 11,108 (18.2) ,983 10,060 11,499 (14.3) 1,027 1, ,780 1,558 (183.7) ( 7.4) 23.2 합계 33,820 39,575 44,903 45,972 9,483 6, ,674 42, ,104 8, ,977 6,394 (13.5) (9.0) (16.2) ( 2.8) 100 * 출처 : 2017 로봇산업실태조사보고서 ( 한국로봇산업협회, 2017 년 ) 2016년을기준으로전문서비스용로봇품목의출하액은 3,949억원으로나타남 기타전문서비스용로봇 (1,134억원) > 의료로봇 (1,030억원) > 군사용로봇 (517억원) > 사회안전및극한작업로봇 (355억원) 등의순으로나타남 전문서비스용로봇시장에서는의료로봇이가장큰부분을차지하고있는것으로파악 [ 전문서비스용로봇생산현황 ] ( 단위 : 억원 ) 111

120 기술개발테마현황분석 착용형근력증강웨어러블로봇의국내연구 / 개발현황및기술수준 웨어러블로봇은크게재활 의료용 (Medical) 과근력증강용 (Augmentative) 으로분류할수있는데, 2015년 10월기준 EXOSKELETON REPORT에서발표한전세계의대표근력증강용로봇개발업체 18개社중국내업체는 Hyundai Motor와 DSME 두곳이포함됨 * 출처 : Exoskeleton report 2015 [ 근력증강용웨어러블로봇을개발중인업체현황 ] 112
121 착용형근력증강웨어러블로봇 다. 기술환경분석 근력증강시스템 근력증강시스템은시스템을이루는재료와구조및동작방식에따라두가지로구분됨 단단한외골격형 (Rigid exoskeleton) 근력증강시스템과부드러운슈트형 (Soft exosuit) 근력증강시스템으로구분 - 최초의외골격형근력증강시스템은 1960년대 GE 연구소가미해군의지원을받아개발한 Hardiman으로, 680kg의무게를들수있게설계되었음 - 최근에는활동성이강조된소프트슈트형태의시스템에대한연구가진행되고있으며, Soft ExoSuit 가대표적 [ 외골격형과슈트형근력증강시스템비교 ] 특징외골격형근력증강시스템슈트형근력증강시스템 소재 알루미늄, 플라스틱등 직물, 인공근육, 와이어, 공압튜브등 무개및부피 무겁고큼 가볍고작음 최대출력 근력의 1~10배 근력의 0~0.1배 관절구조배치 단순함 복잡함 탈부착용이성 어려움 간편함 주요용도 / 응용 근력증강 근력보조 * 출처 : 착용형근력증강기술동향 ( 한국전자통신연구원, 2017) 경제사회적파급효과 근력증강웨어러블로봇의경우산업현장, 재해현장, 군사작전등에서활용도가크므로지속적인관심과수요가늘고있음 - 우리나라산업통상자원부에서도산업원천기술개발사업의하나로지원중이고, 자동차조립공정과제강공정에서활용하기위하여현대자동차와포스코등의기업에서기술개발에참여하고있음 최첨단우주산업에도적용가능하여, 웨어러블로봇은우주실험에더많은장비를가지고오랜기간적은피로도로작업할수있어우주업무수행에큰도움을줄것으로예상됨 - 미국의 NASA에서우주비행에사용될웨어러블로봇을만들어사용하기로함 전세계적으로수요가확대되고있는웨어러블로봇이나, 관련기술의연구는특정나라에집중되어있는현실임 - 현재상용화되어있는로봇도고가의로봇들이어서시장이제대로형성되지않은상태임 - 일반인들이구매하여일상생활에서효과를볼수있는저가의로봇을개발하여세계시장에대량으로공급가능 또한웨어러블로봇을위하여개발된핵심기술들은그외지능형서비스로봇에도응용가능, 우리나라가로봇강국으로입국하기위한원초기술이될것임 113
122 기술개발테마현황분석 3. 기업분석 가. 주요기업비교 국내외근력증강웨어러블로봇분석 원천기술확보를위해각국의정부주도로근력증강웨어러블로봇연구가시작되었으며, 현재는상용화단계에이르러다양한성능의제품이매년소개되고있음 [ 근력증강웨어러블로봇의주요사례분석 ] 국가이름연구기관 ( 지원기관 ) HULC Lockheed Martin 초기모델발표년도 2009 특징 ( 정부지원관련등 ) 2010 년에미국국방부와 HULC 시스템을시험하는조건으로 1.1mUSD 의계약을체결함 제어메커니즘 동작패턴분석, 동역학보상제어 구동메커니즘 ( 반능동 ) 유압구동기 적용부위 하지 미국 XOS BLEEX Raytheon Sarcos UC 버클리대학교 (DARPA) 일본 HAL Cyberdyne 1997 한국 Hyper HEXAR -CR50 HEXAR -HL35 Robo- Wear 한국생산기술연구원 (( 구 ) 지식경제부 ) 한양대학교, ( 주 ) 헥사시스템즈 NT 리서치 년도미국방성연구기관에의해군사용외골격로봇프로젝트로채택 사용자의의도를파악하고신체동역학으로계산된관절토크를더해줌으로써근력보조효과구현 2010 년부터자국내임상실험을위한 JFDA 승인을받고, 최근에는유럽에서임상실험을위한 CE 마크를받음 ( 구 ) 지식경제부, 한국생산기술연구원 SEED형연구사업 (Super Soldier/Labor 구현을위한고출력외골격로봇슈트 ) 의지원을받음자체개발한소형유압구동기사용힘센서, 근육경도센서등을이용, 사용자의의도를파악하여제어함무거운짐을대신지탱하여근력보조효과를구현함 동작제어용 3D 마우스를사용하여사용자가선택적으로로봇을제어 마스터 - 슬레이브제어방법 동작패턴분석, 동역학보상제어 생체신호측정및행동의도파악 근전도및근육경도측정, 유압동역학과힘제어를위한모델링수행다축힘센서를부착하여착용자의힘을측정 근육경도측정 / 행동의도파악 유압구동기전신 유압구동기 전기모터 유압구동기 전기모터 전기모터 하지 전신 ( 일부자유도 ) 하지 하지 상지 전신 ( 일부자유도 ) 114
123 착용형근력증강웨어러블로봇 국내중소기업사례 SG로보틱스는완전마비장애인용일상생활보조로봇, 근력이부족하거나보행이불편한사람들이사용하는근력 보행보조로봇을개발하여생산하는업체. SG 로보틱스, 서강대학교, 세브란스재활병원이공동연구한완전마비장애인용일상생활로봇은스위스 사이배슬론 2016 에출전하여 3위를수상 엑소아틀레트아시아는 2016년설립된국내웨어러블로봇스타트업기업으로모스크바국립대공학연구소에서기술을이전받아한국에서상용화기술을접목한제품을개발및생산. 재활보행로봇은하반신완전 / 불완전손상환자를위한재활훈련과보행보조를지원하는제품으로, 무게 23kg( 배터리포함 ) 에총 4개의구동드라이브로구성 피앤에스미캐틱스는발목관절구동기능및관절간길이자동조절기능을갖고있는보행재활로봇을개발. 뇌졸중, 척수손상, 뇌성마비, 파킨슨병등보행장애를가진환자의보행재활로봇으로활용 헥사시스템즈는착용형외골격로봇을이용한군사용근력증강, 산업지원기기및재활치료및근력보조용의료기기를개발. 약 30개이상의산업용및의료용외골격로봇관련특허의출원및등록건수를보유 엔티로봇은로봇본체, 병원용로봇, 헬스케어로봇등을생산하는업체로척추손상장애인용웨어러블보행로봇, 물건의운반및보행을도와주는웨어러블근력증강로봇, 헬스케어용로봇팔, 근력이부족한환자의식사를도와주는식사보조로봇등다양한헬스케어로봇제품생산 에프알티는한국생산기술연구원에서개발한로봇기술을바탕으로설립된기업으로유압식웨어러블원천기술을활용하여재난, 화재및구난현장에서운용자의임무수행을위한근력지원웨어러블로봇을개발. 웨어러블로봇착용시무게를 30% 체감할수있으며시간당 6km의속도로이동가능 [ 주요중소기업비교 ] ( 단위 : 백만원,%) 국내업체자산총계매출액 매출액증가율 영업이익율당기순이익율 R&D 집중도 피앤에스미캐닉스 2,515 1, ) 헥사시스템즈 1, 엔티로봇 2, 에프알티 284,206 59, ) 2015 년 R&D 집중도 115
124 기술개발테마현황분석 나. 주요업체별기술개발동향 이스라엘의리워크로보틱스 (Rewalk Robotics) 는하지재활용로봇 리워크 (ReWalk) 를개발 상용화된하지재활로봇의대표격인제품으로, 2012년런던마라톤에서하반신마비환자가리워크를착용하고 16일만에완주에성공함 끊임없는제품개선으로기능을업그레이드하고있으며현재 ' 리워크 (Rewalk Rehabilitation 2.0)' 와 ' 리워크퍼스널 6.0(ReWalk Personal 6.0)' 두가지모델이출시됨 - 리워크 2.0은기관용 ( 기관과개인모두사용가능 ) 이며리워크퍼스널 6.0은개인용 - 리워크 2.0은배낭처럼등에메는배터리팩이존재하나, 리워크퍼스널 6.0은벨트처럼허리에차는주머니형태로변경됨 미국록히드마틴은군사용웨어러블로봇헐크 (HULC) 를개발 착용자에게적용되는중량을분담해 90kg의군장을메고도시속 16km의속도로달릴수있게지원 야전에서쉽고빠르게착용할수있도록개발됐으며, 착용한뒤에도포복, 무릎꿇기등유연한동작이가능 약 24kg의무게를가지고있으며, 티타늄프레임으로제작되었음 내장된센서가착용자의움직임을감지하고그정보를마이크로컴퓨터에전송해각모터가동작을제어 군용비행기에쓰이는 JP8 연료를사용해최대 72시간동안구동할수있도록개발중 일본액티브링크는딥러닝플랫폼을채택한근력지원슈트인 파워로더 MS-04 공개 사람의하체부분에로봇의다리부분을장착해무거운물건을쉽게들고운반할수있음 엔비디아딥러닝플랫폼인 엔비디아젯슨 TX1 을탑재한모니터가부착되어 2족보행시지면의기복이나장애물을확인할수있음 사람이평소짐을안고운반하는자세에가깝도록개발돼운반작업시안정감을유지할수있음 일본사이버다인은재활치료용, 산업용등여러분야에서다양한부위에착용할수있는 HAL을개발 몸을움직일때뇌에서근육으로전송되는생체전위신호를읽어착용자의동작을지원하는방식 산업현장에서쓰이는작업지원용모델은최근공항과은행등다양한곳에도입됨 HAL은허리에차는형태로무거운물건을들어올릴때허리에가해지는부담을줄여작업환경을개선하고작업자의부상을방지함 여성이나고령자도착용할수있도록 3kg의경량모델로제작되었으며, 45분충전으로최대 3시간사용가능 116
125 착용형근력증강웨어러블로봇 국내착용형근력증강웨어러블로봇의선구자인헥사시스템즈는 2008년노약자나장애인의근력을보조해주는외골격로봇헥사 (HEXAR) 를개발하고 2011년상지, 하지및전신착용형로봇을출시 상지근력증강로봇은간단한동작으로최대 40kg의물체를들어올릴수있고, 하지근력증강로봇은최대 40kg의짐을등에지고시속 6.5km의속도로움직일수있음 한국생산기술연구원은재난현장및생산현장등에서운용이가능하도록설계된하이퍼 (HyPER) 개발 민수용과군수용두분야에서운용가능하며, 민수용은각종산업현장에서운반및현장작업보조용으로이용되고군수용은증대되는병사의전투부하를극복하고지속적인작전과빠른기동을지원 재난현장에서는구난 구조작업시소방관들의근력을증강해화재진압및인명구조의효율을높임 차량이동이불가능한재난환경에서무거운중량물이나인명의운반작업을도와줘작업보조및인명구조용으로활용가능 국내 SG 로보틱스 (SG Robotics) 는하지완전마비장애인을위한워크온수트 (WalkON Suit) 를발표 하지완전마비장애인의성공적인동작보조를위하여구동토크및보행속도, 착용성, 보행안전성, 시스템안정성, 실용성등의요구조건을모두고려하여개발되었으며, 임상훈련을통해성능검증 앉기 / 서기및평지보행, 곡선보행, 불균일지형보행, 언덕오르기 / 내리기, 계단오르기 / 내리기등의다양한동작들이모두가능하도록동작생성알고리즘을구한 스위스에서개최된 2016년도 Cybathlon 장애인로봇올림픽의 Powered Exoskeleton Race 종목에서최종 3위입상 현대자동차는전기식 (EWR) 근력증강로봇을, 현대로템은유압식 (HWR) 근력증강로봇을개발 전기식로봇은자동차조립에쓰일수있고, 유압식로봇은전동차문이나에어컨등 80kg 의 물체를들고시속 3km 로움직일수있음 방위사업청은국방과학연구소, LIG넥스원과함께 복합임무용착용형근력증강로봇 개발에착수 복합임무용착용형근력증강로봇은다양한과제로이루어져있음 - 고기동하지근력증강로봇의고속동기화제어기술, 고하중상 하지근력증강로봇의통합운용제어기술, 착용형근력증강로봇용고밀도전원기술, 소방대원근력지원관련장치기술 실용화를위한기술개발에중점을두고개발기간에운용환경에적합한각종신뢰성실험을수행 착용자안전설계및성능평가에대한표준화등으로운용성향상과신뢰성있는체계를개발 117
126 기술개발테마현황분석 4. 기술개발현황 가. 기술개발이슈 착용형근력증강웨어러블로봇기술개발개요 로봇기술의발전이진행되면서사람과함께작동하는로봇들이개발되고있으며, 최근에는사람이착용하는웨어러블로봇이발전중 1990년대초반부터물리적부담이가해지는작업을보조하기위한수단으로연구되었음 최근에는근력이약해지거나보행이불편한장애인들을위한로봇이연구되고있음 - 착용형로봇, 로봇의족, 로봇의수등 착용형근력증강웨어러블로봇은인간의팔이나다리등신체의움직임을감지하여구동기가장착된신체를움직여인간의움직임을보조하고힘을증폭시킴 인체동역학분석, 행동의도파악, 제어방법, 구동시스템기술필요 군사분야, 산업분야, 의료분야에서빠르게성장중 외골격형근력증강시스템에사용되는액추에이터기술은기존의기계및로봇공학분야의 기술과크게다르지않지만, 슈트형근력증강시스템에서는유연한액추에이터가사용되어 차이를보임 전세계적으로하드웨어성숙도가높은착용형근력증강웨어러블로봇들이개발되고있고, 인간의움직임을방해하지않고시기적절하게보조력을생성하는알고리즘에대한연구가 활발히진행중 EAP(Electro-active polymer) 와 TRP(Temperature responsive polymer) 등의신소재 개발로구동부간소화연구가활발해짐 재활및트레이닝분야의슈트형근력증강시스템에다방면으로적용 착용형근력증강웨어러블로봇설계 인체와의유사성과경량화가중요한주제로, 단단한소재를사용한로봇뿐만아니라가볍고 부드러운소재를이용한센서나구동기를활용한로봇들도많이개발중임 인간과병렬적으로작용하기위해신체와유사한방법으로구동하는것이필요하기때문에 메커니즘과구조연구진행 118
127 착용형근력증강웨어러블로봇 일본 Chuo 대학교와 Nabtesco 사에서근육을모방한풍선형태의구동기를이용해무거운 물건을들때허리를보조해주는로봇을개발 미국유타대학교와시카고재활원에서는능동변속기가장착된전동인공슬관절을개발함 1.7kg 로가볍게설계되었고, 착용하면계단을오를수있음 미국 MIT에서는지상부근에서수동작업을수행하는작업자를보조하기위한여분의로봇팔 (SUPL) 인 MantisBot 개발 흉부에서뻗어나온로봇팔이바닥을지지하여작업자가엎드린자세를유지하면서도자유로운두손을원하는작업에사용할수있도록지원 착용형근력증강웨어러블로봇알고리즘및보조전략 착용형근력증강웨어러블로봇은인간과밀접하게상호작용하기때문에알고리즘과 보조전략도중요 일본 Maebashi Institute of Technology 에서는어깨관절의힘보조시스템을제어하기위해 뇌파 (EEP) 신호로부터어깨관절의 EMG 신호를추정하기위한선형모델을수립 미국컬럼비아대학교연구진에서는하지착용형로봇의무게와관성이건강한사람의 자연스러운보행에미치는영향을분석 착용형근력증강웨어러블로봇의무게와관성은보행훈련효율성에결정적인두요소 착용형근력증강웨어러블로봇기술의표준화문제 아직핵심부품, 기반기술에대한해외의존도가높고, 표준화에도체계적인대응이필요 중소기업의능력만으로는해결하기쉽지않아정부차원의정책적지원이필요 119
128 기술개발테마현황분석 나. 특허동향분석 착용형근력증강웨어러블로봇특허상주요기술 주요기술 착용형근력증강웨어러블로봇은크게강성설계기술과인체동작해석기술, DB구축기술로분류될수있고, 강성설계기술은구동모듈설계기술과강성제어알고리즘기술로, 인체동작해석기술은신체부착센서의고정밀측정기술, 3차원모션캡쳐기술, 최적보조력시뮬레이션기술, DB구축기술은인체근골격계데이터를 DB화하는기술로분류됨 분류요소기술설명 강성설계기술 구동모듈설계기술 강성제어알고리즘기술 탄성체기반의가변강성구동모듈설계기술 수동 / 부분수동 / 능동구동방식의강성제어알고리즘기술 신체부착센서의측정기술 작업자의도파악을위한신체부착센서의고정밀측정기술 인체동작해석 3 차원모션캡쳐기술운동역학데이터추출을위한 3 차원모션캡쳐기술 DB 구축기술 최적보조력시뮬레이션기술 인체근골격계 DB 구축기술 착용자와 로봇의 상호작용이 반영된 최적 보조력 시뮬레이션 기술 인체의 근골격계 데이터를 객관화 / 표준화하기 위한 DB 구축 기술 세부분야별특허동향 주요기술별국가별특허동향 착용형근력증강웨어러블로봇의요소기술별주요국가별특허정보데이터입수하였으며, 최근 10 년간의특허데이터를비교분석함 분류요소기술한국미국일본유럽계 강성설계기술 구동모듈설계기술 강성제어알고리즘기술 신체부착센서의측정기술 인체동작해석 3 차원모션캡쳐기술 최적보조력시뮬레이션기술 DB 구축기술인체근골격계 DB 구축기술 합계
129 착용형근력증강웨어러블로봇 국가별요소기술별특허동향에서강성제어알고리즘기술과인체근골격계 DB 구축기술은일본이 가장많은비중을차지하고있으며, 강성제어알고리즘기술과인체근골격계 DB 구축기술은 미국이, 구동모듈설계기술과신체부착센서측정기술은한국과미국이높은비중을나타내고있음 주요기술별출원인동향 세부분야 요소기술 기술집중도 주요출원인 국내특허동향 삼성전자 대기업, 대학중심 구동모듈설계기술 KAWASAKI HEAVY HONDA MOTOR 삼성전자, 서강대학교, 포스코, 전남대학교, 등 강성설계기술 HONDA MOTOR 대기업, 대학중심 강성제어알고리즘기술 DAINIPPON PRINTING TOYOTA MOTOR 삼성전자, 엘지전자, 국방과학연구소, 한국생산기술원, 현대로템등 대학교, 출연연중심 신체부착센서의측정기술 GORBEL EQUOS RESEARCH TOYOTA MOTOR 인제대학교, 피앤에스미캐닉스, 한국생산기술연구원, 한국전자통신연구원등 한국과학기술연구원 인체동작해석 3 차원모션캡쳐기술 HIROSHIMA UNIV 대학교, 출연연중심 한국과학기술연구원, PREFECTURAL 경희대학교등 UNIV JUSTIN 최적보조력시뮬레이션기술 FRANKIAN MOROW 대기업중심 삼성전자등 TOYOTA MOTOR UNIV OF TSUKUBA DB 구축기술 인체근골격계 DB 구축기술 NANT HOLDINGS I AKITA 대기업대학중심 삼성전자, 한국과학기술원, 휴비딕등 PREFECTURALU : 80 건이상, : 60~79 건, : 40~59 건, : 20~39 건, : 20 건미만 121
130 기술개발테마현황분석 강성설계기술분야주요출원인동향 구동모듈설계기술분야는삼성전자가가장많은특허를보유하고있으며그다음으로는 KAWASAKI HEAVY, HONDA MOTOR 등이많은특허를보유하고있는등일본회사들이주류를이루고있음 강성제어알고리즘기술분야는 HONDA MOTOR가가장많은특허를보유하고있으며그다음으로는 DAINIPPON PRINTING, TOYOTA MOTOR 등이많은특허를보유하고있는등일본회사들이주류를이루고있음 인체동작해석기술분야주요출원인동향 신체부착센서의측정기술분야는 GORBEL가가장많은특허를보유하고있으며그다음으로는 EQUOS RESEARCH, TOYOTA MOTOR, 등이많은특허를출원하고있음 3차원모션캡쳐기술분야는한국과학기술연구원이가장많은특허를보유하고있으며그다음으로는 HIROSHIMA UNIV, PREFECTURAL UNIV, 등이많은특허를보유하고있는등대학및출연연이주류를이루고있음 최적보조력시뮬레이션기술분야는 JUSTIN FRANKIAN이가장많은특허를보유하고있으며그다음으로는 MOROW, TOYOTA MOTOR, 등이많은특허를보유하고있음 DB구축기술분야주요출원인동향 인체근골격계 DB 구축기술분야는 UNIV OF TSUKUBA가가장많은특허를보유하고있으며그다음으로는 NANT HOLDINGS, AKITA PREFECTURAL UNIV. 등이많은특허를보유하고있으며, 주로일본의대학교가주류를이루고있음 착용형근력증강웨어러블로봇분야의주요경쟁기술및공백기술 착용형근력증강웨어러블로봇분야의주요경쟁기술은강성설계기술분야중강성제어 알고리즘기술이고, 공백기술은전반적으로인체동작해석기술로나타나며, 그중에서도 3 차원운동역학데이터추출을위한모션캡처기술로나타남 세부분야요소기술기술집중도 강성설계기술 구동모듈설계기술 강성제어알고리즘기술 신체부착센서의측정기술 인체동작해석 3 차원모션캡쳐기술 최적보조력시뮬레이션기술 DB 구축기술인체근골격계 DB 구축기술 : 80 건이상, : 60~79 건, : 40~59 건, : 20~39 건, : 20 건미만 122
131 착용형근력증강웨어러블로봇 최신국내특허기술동향 분류 요소기술 최근핵심요소기술동향 구동모듈설계기술 역구동이용이하게되는구조설계기술 슬라이딩조인트에탄성력을제공하는기술 강성설계기술 강성제어알고리즘기술 가상센싱데이터를통해학습을통한알고리즘생성기술 역동역학적방법과 HRI 센싱방법을융합한보행의도감지알고리즘 신체부착센서의측정기술 손바닥센서와발바닥센서를활용한하중측정기술 착용한상태에서의신발바닥과지면과의접촉여부및사용자의양발의압력변화에따른무게중심의이동을감지하는기술 사용자의움직임, 이동 경로, 보행패턴, 보행속도및 주변환경에대한정보를수집하는기술 인체동작해석 3차원모션캡쳐기술 산출된비례계수를 적용하여 사용자 모션 특징 데이터 (motion feature data) 를생성하는기술 가상인체모델의보행과연관된가상센싱데이터 (virtual sensing data) 를생성하는기술 최적보조력시뮬레이션기술 햅틱 (haptics) 기능으로보행훈련을구현하는보행훈련시뮬레이션기술 DB구축기술 인체근골격계 DB 구축기술 구축된 DB를통해 AI에응용하는기술 신체특징데이터와모션특징데이터를통해각각의사이에상관관계가최대가되게하는비례계수도출하는기술 국내특허동향을살펴보면대기업과대학, 출연연은강성설계기술을집중적으로연구개발하고있으며, 인체동작해석기술은대학교및출연연을중심으로연구개발을진행중이며, 중소기업은 DB구축기술및신체부착센서기술에집중하여연구개발을하고있는것으로나타남 중소기업특허전략수립방향및시사점 착용형근력증강웨어러블로봇분야의공백기술분야는운동역학데이터추출을위한 3차원모션캡쳐기술이고중소기업의시장진입상대적으로수월한분야는인체근골격계 DB 구축기술및신체부착센서의측정기술로나타남 착용형근력증강웨어러블로봇분야는자동차회사를중심으로연구개발이진행되고있고, 그외에도인공지능및센싱기술등다양한분야가융합되는기술로현재는대기업, 대학, 출연연, 중소기업모두가연구개발을진행하고있는기술분야임 단일기술로개발이되기어려운기술이기때문에강성설계기술은자동차회사를중심으로이루어지고있으며, 중소기업은신체부착센싱및최적보조력시뮬레이션기술에집중하는것이향후대기업과의협력을위해유리할것으로판단됨 또한보행이불편한노약자등을위한생활보조용로봇이나장애인의장애부위를보조할수있는착용형로봇이필요하기때문에특성화된기능가지는로봇을위해병원이나재활의학과등과의긴밀한협업이필요함 123
132 기술개발테마현황분석 향후중소기업은상대적으로경쟁이치열하지않은인체근골격계 DB 구축기술및신체부착센서의측정기술을공공연구기관의기술을이전받거나공동은연구개발하여제품화하는특허전략을수립하는것이바람직할것으로사료됨 특히구동모듈설계기술은서강대학교, 전남대학교, 한양대학교가보유한기술을바탕으로인체동작해석기술을개발하여공동으로연구개발을추진하는것을우선적으로고려해볼수있을것으로판단됨 124
133 착용형근력증강웨어러블로봇 5. 연구개발네트워크 가. 연구개발기관 / 자원 연구개발기관 착용형근력증강웨어러블로봇분야주요연구개발기관 한국생산기술연구원 ( 원장이성일 ) - 외골격근력지원로봇슈트 하이퍼 (HyPer) 개발 : 발, 발목, 허리에사람의생체신호를감지하는 25개정밀감지센서를적용시켜인간의물리적인능력을향상시켜주는고출력외골격로봇슈트개발. 사용자의의도를감지할수있는센서제어알고리즘개발및센서부착형소형액추에이터모듈화기술개발 - 데모데이 에서세계최초소방관용웨어러블로봇기술을선보여최우수상 ( 국무총리상 ) 을수상. 에프알티, 아이리스, LIG넥스원, 이셀전자와공동개발. 세계두번째유압식, 근육강화용웨어러블로봇. 재활보조로봇으로도활용가능 국방과학연구소 - 기동능력에중점을둔 고기동하지근력증강로봇의고속동기화제어기술 개발 헥사시스템즈 - 산업지원기기및군사용근력증강로봇을개발판매 - 군사작전현장및산업현장적용을목적으로개발되었으며착용자상지 하지외부에외골격형태로부착하여상지 하지근력증강을위한외골격로봇시스템을보유 LIG넥스원 - 무거운하중을다루는데중점을둔 고하중상하지근력증강로봇의통합운용제어기술 및 착용형근력증강로봇용고밀도전원기술 개발 연구개발자원 국가연구개발지원사업 중소벤처기업부 - 중소기업기술혁신사업 - 상용화기술개발사업 ( 구매조건부등 ) - 융복합기술개발사업 - 산학연협력기술개발사업 - 제품서비스기술개발사업 - 중소기업 R&D 역량제고사업 - 제품 공정개선기술개발사업 - 맞춤형기술파트너지원사업 125
134 기술개발테마현황분석 - 산연전용과제 : 우수 R&D 인프라를활용한대표적인중소기업지원연구기관으로연구부서와중소기업간연계를통한기술지원은물론변리사, 산학연협력코디네이터, 기술거래사, 기술가치평가사등기술사업화관련전담인력이사업화사안마다관여해고품질비즈니스컨설팅제공 산업통상자원부 - 에너지 자원기술개발사업 - 전략핵심소재기술개발사업 - 신재생에너지기술개발사업 - 산업융합원천기술개발사업 - 로봇미래전략 (2013~2022) - 산업엔진프로젝트 (19대미래성장동력 ) - 사업화연계기술개발사업 ( 민간투자연계형등 ) 보건복지부 - 국립재활원 보훈병원등에재활로봇보급 - 국공립병원에국산수술로봇선도제품시범적용 로봇산업정책협의회 - 창의적 도전적로봇연구촉진을위한풀뿌리지원프로그램 한국로봇산업진흥원 - 로봇산업클러스터 : 센터와장비를구축하고, 기술사업화촉진및로봇창업맞춤형지원과상용화기술개발지원을통해의료, 사회안전, 제조분야의로봇산업육성을목표로함 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 - 시장창출형로봇보급사업 : 보건복지부와국립재활원이참여하는의료재활로봇보급사업, 산업통상자원부와부천산업진흥재단이참여하는시장창출형로봇부품보급사업등의공공수요형사업과아이디어발굴형사업을진행 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등맞춤형기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 126
135 착용형근력증강웨어러블로봇 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국산업기술진흥원, 한국에너지기술평가원 ) - e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 127
136 기술개발테마현황분석 나. 연구개발인력 착용형근력증강웨어러블로봇분야는한국생산기술연구원, 한국과학기술연구원, 숭실대학교, 성균관대학교, 한양대학교, 연세대학교, 헥사시스템즈등에서주로연구개발을진행하고 있음 정부는개방형로봇산업생태계조성을위해인력양성측면에서多기술영역업무수행및 다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형 로봇전문인력양성추진 [ 착용형근력증강웨어러블로봇분야주요연구인력현황 ] 기관 성명 직급 한국생산기술연구원 이동욱 그룹장 한국과학기술연구원 최준호 책임연구원 한국과학기술연구원 김승종 책임연구원 한국과학기술연구원 김기훈 책임연구원 숭실대학교 김진오 교수 성균관대학교 이석한 교수 한양대학교 임성수 교수 연세대학교 원영신 교수 헥사시스템즈 한창수 대표 128
137 착용형근력증강웨어러블로봇 다. 기술이전가능기술 (1) 기술이전가능기관 착용형근력증강웨어러블로봇의요소기술은크게수동 / 부분수동 / 능동구동방식의강성제어알고리즘기술, 작업자의도파악을위한신체부착센서의고정밀측정기술, 운동역학데이터추출을위한 3차원모션캡쳐기술, 착용자와로봇의상호작용이반영된최적보조력시뮬레이션기술의총네개의분류로구분됨 기술이전이가능한기관은한국과학기술연구원, 숭실대학교, 성균관대학교, 한양대학교가있음 분류요소기술기관 강성제어알고리즘기술신체부착센서의고정밀측정기술 3차원모션캡쳐기술 [ 착용형근력증강웨어러블로봇분야연구조직 ] 기구적으로강성조절이가능한액추에이터 다중센서를이용한보행재활로봇지면반발력산출방법 모션캡쳐기반의자세분석을통한재활장치및이에따른재활방법 한국과학기술연구원 숭실대학교 경북대학교 상지근력보조를위한외골격메커니즘 한국과학기술연구원 최적보조력시뮬레이션기술 보행보조로봇및그보행보조방법 근력지원용착용형로봇 하지착용형근력지원로봇 성균관대학교 한양대학교 한양대학교 하체근력및고관절강화용운동기 연세대학교 129
138 기술개발테마현황분석 (2) 이전기술에대한세부내용 분류 기술명 세부내용 기구적으로강성조절이가능한액추에이터 기술이전목적및필요성 기구적으로강성변화가가능한액추에이터로두개의모터를이용하여강성및위치를독립적으로변화가능 외골격로봇에사용되면, 환자의운동능력에따라강성을조절하여좀더효과적인재활훈련을기대할수있으며예상치못하는근육의경직에서도환자를안전하게보호할수있음 기술활용방안및기대성과 본기술은 Parallel mechanism 을이용하여판스프링의유효길이를조절하여강성을조절함 두개의모터의상대속도를이용하여위치및강성조절가능 과도한토크가전달되는것을방지하기위한토크리미터를장착함 본기술은재활로봇, 서비스로봇이외적용이가능한모든개인용로봇분야에적용이가능함 세부문의 기술관련 한국과학기술연구원 130
139 착용형근력증강웨어러블로봇 분류 기술명 세부내용 모션캡쳐기반의자세분석을통한재활장치및이에따른재활방법 재활장치및그에따른재활방법이제공됨 기술활용방안및기대성과 반사체, 압력센서보드및카메라를포함하는재활시스템의재활방법은반사체에복수개의제1 마커가부착된상태에서카메라가반사체를촬영하여, 카메라의위치및자세를추정하는단계, 복수개의제2 마커가부착된재활대상이압력센서보드상에위치하면, 카메라를이용하여재활대상을촬영하는단계, 재활대상을촬영한이미지및압력센서보드의출력신호를이용하여재활대상의자세를추정하고, 보행동작을분석하는단계및분석결과를출력하는단계를포함함 기술관련 세부문의 경북대학교 계약관련 131
140 기술개발테마현황분석 분류 세부내용 기술명 기술이전목적및필요성 하지착용형근력지원로봇 본발명에의한하지착용형근력지원로봇은, 사용자의종아리에장착되는종아리프레임 ; 상기종아리프레임의하측에회전가능한구조로결합되며, 사용자의보행시지면을딛는발프레임및상기발프레임이지면을딛는과정에서복원탄성력을형성하고, 상기발프레임이지면으로부터떨어지는경우상기복원탄성력을상기종아리프레임과상기발프레임에인가하여상기종아리프레임과상기발프레임이이루는결합각도를사전에설정된범위로복원시키는회전복원유닛을포함하되, 상기복원탄성력은상기종아리프레임과상기발프레임이이루는상기결합각도가상기사전에설정된범위를벗어나는과정에서형성됨 기술활용방안및기대성과 본발명에의한하지착용형근력지원로봇을이용하면, 별도의동력을이용하지아니하고서도사용자의근력을보조할수있고, 일부관절이수동형관절로구성하더라도사용자의동작불편함을최소화시킬수있으며, 구성이단순화됨으로써제품의소형화및경량화가가능해지고제조비용이절감된다는장점이있음 기술관련 세부문의 한양대학교에리카 계약관련 132
![착용형근력증강웨어러블로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 착용형근력증강웨어러블로봇분야키워드클러스터링 ] [ 착용형근력증강웨어러블로봇주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1.](/docs-images/93/112329278/images/141-1.jpg "SUPPORT DEVICE, OPERATION SUPPORT DEVICE, AND MUSCLE 클러스터 01 muscle training 6~8 STRENGTH TRAINING SUPPORT DEVICE 2. Wearable muscle strength training detector device 3.")
141 착용형근력증강웨어러블로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 착용형근력증강웨어러블로봇분야키워드클러스터링 ] [ 착용형근력증강웨어러블로봇주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1. SUPPORT DEVICE, OPERATION SUPPORT DEVICE, AND MUSCLE 클러스터 01 muscle training 6~8 STRENGTH TRAINING SUPPORT DEVICE 2. Wearable muscle strength training detector device 3. Elastic shoulder support device for training mind and muscles for proper posture 133
142 기술개발테마현황분석 No 주요키워드연관도수치관련특허 / 논문제목 1. Adaptable bi-directional range-of-motion exercise apparatus 클러스터 02 force motion 5~6 providing repose configuration 2. Soft Exosuit for Assistance with Human Motion 3. Trunk Supporting Exoskeleton and Method of Use 1. Adaptable bi-directional range-of-motion exercise apparatus 클러스터 03 movement subject 3~4 providing repose configuration 2. Spinal Treatment Devices, Methods, and Systems 3. SYSTEM FOR SYNERGISTIC NEURO-PHYSIOLOGICAL REHABILITATION AND/OR FUNCTIONAL DEVELOPMENT 클러스터 04 ankle leg-support 6~7 1. Lower leg supporter 2. Stride stretching apparatus and method 3. Portable active pneumatically powered ankle-foot orthosis 1. 1st International Conference on Ambient Intelligence for Health, AmIHEALTH 2015 클러스터 05 frame pressure 7~8 2. Femoral support member for a walking assistance device 3. WEARABLE ROBOTIC DEVICE WITH BRACING SYSTEM WITH MOISTURE AND PRESSURE MANAGEMENT FOR COMFORTABLE REHABILITATION 1. Modelling and design of a synergy-based actuator for a 클러스터 06 Power assistance 5~7 tendon-driven soft robotic glove 2. A biologically inspired soft exosuit for walking assistance 3. Power and endurance for comfortable wearable robotics 1. Event-based control for sit-to-stand transition using a wearable exoskeleton 클러스터 07 Patient leg 7~9 2. Intention estimation and walking assistance for severe paraplegic patients having difficulty in controlling neuromuscular activity 3. Development of a lower extremity rehabilitation aid utilizing an insole-integrated load sensor matrix and a sole-embedded measurement node 134
143 착용형근력증강웨어러블로봇 No 주요키워드연관도수치관련특허 / 논문제목 1. Development of semg-driven assistive devices based on twisted 클러스터 08 robotic frame 3~5 string actuation 2. A flexible architecture to enhance wearable robots: Integration of EMG-informed models 3. Contact displacement actuator system 1. Soft Wearable Robotics Technologies for Body Motion Sensing 클러스터 09 body motion 4~7 2. Evaluating the effect of local variations in visually-similar motions on the clustering of body sensor features 3. INTEGRATOR FOR GLOBAL ELASTIC MOTION MODE OF HUMAN BODY 1. A motion phase-based hybrid assistive controller for lower limb exoskeletons 클러스터 10 motion assist 5~6 2. Motion-assist system of wearable motion-assist device, wearable motion-assist device, and motion-assist method of wearable motion-assist device 3. Effective motion assistance using a passive force endoskeleton power assist suit 135
144 기술개발테마현황분석 (2) 요소기술도출 산업 시장분석, 기술 ( 특허 ) 분석, 전문가의견, 중소기업기술수요를바탕으로로드맵기획을 위한요소기술도출 [ 착용형근력증강웨어러블로봇분야요소기술도출 ] 분류요소기술출처 탄성체기반의가변강성구동모듈설계기술 기술 / 시장분석, 전문가추천 수동구동방식의강성제어알고리즘기술 기술 / 시장분석, 전문가추천 강성설계기술 부분수동구동방식의강성제어알고리즘기술 기술 / 시장분석, 전문가추천 능동구동방식의강성제어알고리즘기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 작업자의도파악을위한신세부착센서의고정밀측정기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 인체동작해석 운동역학데이터추출을위한 3 차원모션캡쳐기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 착용자와로봇의상호작용이반영된최적보조력시뮬레이션기술 전문가추천, 특허 / 논문클러스터링 인체의근골격계데이터를객관화 / 표준화하기위한 DB 구축기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 DB 구축기술 로봇의무게에따른관성측정기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 최적보조력시뮬레이션기술 전문가추천, 특허 / 논문클러스터링 136
145 착용형근력증강웨어러블로봇 (3) 핵심요소기술선정 확정된요소기술을대상으로중소기업에적합한핵심요소기술선정 [ 착용형근력증강웨어러블로봇분야핵심요소기술 ] 분류핵심요소기술개요 탄성체기반의가변강성구동모듈설계기술 자세및중량지지보조를위한 강성제어기술개발 강성설계기술 수동 / 부분수동 / 능동구동방식의강성제어알고리즘기술 자세및중량지지보조를위한강성제어기술개발 작업자의도파악을위한신체부착센서의고정밀측정기술 다양한사용자와작업환경에서의로봇보조력최적화기술개발 인체동작해석 운동역학데이터추출을위한 3 차원모션캡쳐기술 다양한사용자와작업환경에서의로봇보조력최적화기술개발 착용자와로봇의상호작용이반영된최적보조력시뮬레이션기술 다양한사용자와작업환경에서의로봇보조력최적화기술개발 DB 구축기술 인체의근골격계데이터를객관화 / 표준화하기위한 DB 구축기술 DB 기반의인체데이터모델링자동화기술개발 137

146 기술개발테마현황분석 나. 착용형근력증강웨어러블로봇기술로드맵 최종중소기업기술로드맵은기술 / 시장니즈, 연차별개발계획, 최종목표등을제시함으로써 중소기업의기술개발방향성을제시 138
147 착용형근력증강웨어러블로봇 다. 연구개발목표설정 핵심요소기술별최종목표는아래와같이기술요구사항과연차별개발목표로제시함 [ 착용형근력증강웨어러블로봇분야핵심요소기술연구목표 ] 분류 핵심요소기술 기술요구사항 연차별개발목표 1 차년도 2 차년도 3 차년도 최종목표 강성설계기술 탄성체기반의가변강성구동모듈설계기술 수동 / 부분수동 / 능동구동방식의강성제어알고리즘기술 설계완성률 (%) 제어성공률 (%) 90% 이상 90% 이상 95% 이상 95% 이상 98% 이상 98% 이상 가변강성구동모듈개발 강성제어알고리즘개발 작업자의도파악을위한신체부착센서의고정밀측정기술 센서측정률 (%) 90% 이상 95% 이상 98% 이상 신체부착센서의고정밀측정기술개발 인체동작해석 운동역학데이터추출위한 3 차원모션캡쳐기술 모션인지율 (%) 90% 이상 95% 이상 98% 이상 3 차원모션캡쳐기술개발 착용자와로봇의상호작용이반영된최적보조력시뮬레이션기술 최적보조율 (%) 90% 이상 95% 이상 98% 이상 최적보조력시뮬레이션기술개발 DB 구축기술 인체의근골격계데이터를객관화 / 표준화하기위한 DB 구축기술 DB 완성률 (%) 90% 이상 95% 이상 98% 이상 근골격계데이터의 DB 구축 139
148
149 기술개발테마현황분석 산업용부상방지 및작업지원로봇
150
151 산업용부상방지및작업지원로봇 정의및범위 산업현장에서개별작업에최적화된보조력을생성하여작업자의부상을방지하거나작업효율을증가시켜주는로봇 제조용로봇과서비스용로봇의범위사이에넓게겹쳐져있는제품들로, 근로자들의안전하고효율적인작업을지원하는데초점을두고있음 정부지원정책 2016년관계부처합동으로 로봇산업발전방안 을발표, 5대유망품목을선정하는등시장변화흐름에따른정책적대응방안을제시 2017년 10월에는관계부처합동으로 2017년지능형로봇실행계획 을발표 로봇핵심부품활성화정책수립및진행 범부처협력로봇 R&D 실시 ( 보건복지부, 국토교통부, 해양수산부, 농림축산식품부, 문화체육부등 ) 중소기업시장대응전략 강점 (Strength) ( 환경 ) 우수한 ICT 인프라보유 ( 기술 ) 높은안정성과효율성확보가능 ( 정책 ) 로봇산업에대한적극적인지원기회 (Opportunity) ( 환경 ) 로봇기술의발달로적용분야확대 ( 기술 ) 근로자와함께운용이가능한제품들이개발중 ( 정책 ) 지방자치단체의시범사업정책증가중 약점 (Weakness) ( 기술 ) 기술표준화미흡 ( 정책 ) 기반기술에대한 R&D 정책미흡위협 (Threat) ( 기술 ) 글로벌기업들과의기술격차 ( 정책 ) 분야가아닌개별과제에대한 R&D 지원정책 중소기업의시장대응전략 로봇기반기술과 AI, 빅데이터기술을융합해개별과제자동화가가능한로봇개발필요 공백기술분야이면서, 수요처가존재하고, 대학교및공공연구기관에서공동연구개발혹은기술이전이가능한제품을우선적으로사업화
152 핵심요소기술로드맵
153 산업용부상방지및작업지원로봇 1. 개요 가. 정의및필요성 산업용부상방지및작업지원로봇은산업현장에서개별작업에최적화된보조력을생성하여작업자의부상을방지하거나작업효율을증가시켜주는로봇임 제조용로봇과서비스용로봇의범위사이에넓게겹쳐져있는제품들로, 근로자들의안전하고효율적인작업을지원하는데초점을두고있음 [ 로봇산업 3 대분야 ] 분야기능대표제품 제조용로봇 부품또는완성품자동화공정및반자동화된생산공정에서생산, 생산보조및지원을담당하는로봇 조립로봇, 위험물취급로봇, 물품이송로봇, 포장및적재로봇등 전문서비스용로봇 전문가를보조하여서비스를제공하는로봇 수술로봇, 재활보조로봇, 감시정찰로봇, 건설로봇, 의료서비스로봇등 개인서비스용로봇 일반개인사용자를대상으로서비스를제공하는로봇 청소로봇, 교육용로봇, 오락용로봇, 보행보조로봇, 애완견로봇등 산업용부상방지및작업지원로봇은전통적인분야에서새로운분야들로로봇기술의적용이확대되면서발전하기시작 대량생산및고정형생산시설에서적합한단순반복형로봇에서자동화된유연생산시스템으로발전하면서근로자들과공존할필요성증대 4차산업혁명이시작되면서로봇을사용하지않던환경에서로봇을사용하게되고, 특히인간과의협업이중요해짐에따라앞으로관련시장이급증할것으로예상 산업용부상방지및작업지원로봇에지능형로봇기술을적용하는사례가증가 최근지능형로봇의범위가제조업경쟁력강화, 고령화, 안전사회욕구증대등메가트렌드를 반영하여제조, 의료, 안전분야를중심으로기타서비스적용분야를포괄하는형태로발전 145
154 기술개발테마현황분석 산업용로봇은세계로봇산업에서가장큰비중을차지 산업용로봇이가장많은비중을차지하며, 개인서비스용이가장높은성장세를나타냄 세계로봇연맹 (IFR) 의 World Robotics 2015에따르면 2014년세계로봇시장은약 167억달러로최근 5년간연평균 21.2% 의성장세 - 산업용로봇 107억달러, 전문서비스로봇 38억달러, 개인서비스로봇 22억달러규모 산업용제조로봇의적용분야는자동차및전기전자분야가 70%~95% 로거의대부분을차지 미국, 독일, 중국은자동차분야가많은부분을차지하고있으며전자기기분야는상대적으로적음 일본은자동차와전자기기분야가비슷함 한국은전자기기분야가많은부분을차지함 [ 제조로봇의적용분야 ] 미국 중국 독일 일본 한국 식료품 3.3% 2.7% 3.9% 2.1% 0.5% 섬유 0.1% 0.0% 0.1% - - 화학 7.3% 7.6% 11.5% 7.4% 4.3% 일차금속 3.6% 1.0% 2.9% 0.5% 0.3% 금속제품 2.2% 3.1% 7.5% 4.8% 0.5% 전자기기 14.6% 18.5% 6.0% 34.3% 66.8% 일반기계 3.7% 0.7% 4.7% 3.6% 0.1% 자동차 57.3% 54.2% 59.4% 34.5% 26.8% 기타 7.9% 12.1% 3.9% 12.9% 0.7% * 출처 : 차세대제조로봇기술동향과산업전망 ( 한국산업기술평가관리원, 2016) 146
155 산업용부상방지및작업지원로봇 나. 범위 제조용로봇과서비스용로봇의범위사이에넓게겹쳐져있는제품들로, 근로자들의안전하고효율적인작업을지원하는데초점을두고있음 산업용로봇에서부터농업로봇, 해양탐사로봇, 스포츠훈련로봇등로봇으로서의특징은서로다르지만사람이위험에노출된채작업하던상황을완전히대체하거나보완할수있는로봇 [ 산업용로봇과농업로봇비교 ] 비교항목산업용로봇농업로봇 작업대상의균일성균일불균일 작업대상의규격화가능성가능불가능 작업대상에따라로봇재배치, 배열가능대부분불가능 이동기능의필요성거의불필요함대부분필요함 환경제어의용이성용이곤란 주행노면대부분포장된평탄지불규칙한노면, 경사지 사용자의자본정도대자본소자본 연간가동일수연중사용가능계절적작업성 전담오퍼레이터배치가능배치불가능 안전을위한금지구역설정설정가능설정곤란 * 출처 : 농업로봇기술동향과산업전망 ( 한국산업기술평가관리원, 2015) 산업용부상방지및작업지원로봇중대표적인로봇으로안전로봇과근력보조웨어러블로봇이존재 안전로봇은재난이발생하거나발생할가능성이높은상황에투입되어피해가확산되는것을방지하기위하여정찰, 방재및구호작업등을직접수행하거나간접적으로지원하는로봇 - 안전로봇은감시 정찰용로봇, 대테러용로봇, 소방용로봇등이있음 - 안전로봇은개발기간이길고많은비용이소모되며, 제품의개선및인증을위하여시범운영등이추가적으로요구되기때문에민간주도의시장창출이어려움 - 안전로봇의구매자는주로정부이며, 정부의정책이산업활성화에큰영향을미침 147
156 기술개발테마현황분석 [ 안전로봇의분류 ] 분류 용도 감시 정찰용 인간이접근하기어렵거나, 주기적인정찰이필요한상황에투입되어현장 정보를획득 대테러용 폭발물감지및제거등테러를대비 대응 소방용 소방대원을도와화재를진압 인명탐색및구조용 재난상황에서요구조자를탐색하거나구조 재난복구용 재난상황이종료된이후잔해물처리등재난복구 * 출처 : 안전로봇기술현황과향후전망 ( 한국산업기술평가관리원, 2015) 근력증강웨어러블로봇은인간의팔이나다리등신체의움직임을감지하여구동기가장착된신체를움직여인간의움직임을보조하고힘을증폭시키는로봇 - 인간의근력을향상시키는기술과더불어구동기반력으로착용자가힘을느끼도록해주는기술로발전하고있으며, 수많은사용자와폭넓은적용범위에확대적용하기위한데이터를축적하여개별제조사와사용자의개발기간단축과구매가격최소화를위한기술확보방향이제시되고있음 [ 외골격형과슈트형근력증강시스템비교 ] 특징외골격형근력증강시스템슈트형근력증강시스템 소재 알루미늄, 플라스틱등 직물, 인공근육, 와이어, 공압튜브등 무개및부피 무겁고큼 가볍고작음 최대출력 근력의 1~10배 근력의 0~0.1배 관절구조배치 단순함 복잡함 탈부착용이성 어려움 간편함 주요용도 / 응용 근력증강 근력보조 * 출처 : 착용형근력증강기술동향 ( 한국전자통신연구원, 2017) 148
157 산업용부상방지및작업지원로봇 2. 외부환경분석 가. 산업환경분석 (1) 산업의특징 산업용부상방지및작업지원로봇은최근로봇기술이발전하면서다양한분야와상황에서점차실용화되고있는로봇임 AI, 딥러닝등최신기술과의융합이필요한로봇에서부터, 단순히무거운물건을들어이동시키거나배달하는비교적단순한로봇까지다양한로봇이포함됨 사람이접근할수없는빠르고강력한로봇보다는사람과함께하면서오히려사람의안전을지원하는로봇들로, 사람을인식하고사람과상호작용하는기능이필수적임 대부분기존산업용로봇에비해많은비용이필요하지않고공간도많이차지하지않으며, 특정과업을위해설계 제작됨 안전로봇 : 정찰용, 폭발물처리, 위험물취급, 험지로물자수송, 소방로봇, 건물잔해제거, 화학물질유출현장에서인명구출등 수중탐색로봇 : 심해탐사로봇, 해저탐사를위한보행로봇등 농 축산업로봇 : 방제로봇, 텃밭청소로봇, 송아지포유로봇, 돈사청소지원로봇등 음식제조로봇 : 샐러드, 커피, 햄버거제조로봇등 관련시장이형성되고있는초기단계로규모가작으나잠재력은높음 각산업분야내에서첨단화에대한수요가높으며, 이를산업용부상방지및작업지원로봇이충분히대체가능 수요자중심의제품개발이필요함 149
 구분 16 17 18 19 20 21 CAGR 세계시장 37,750 41,380 45,350 49,700 54,480 59,710 9.")
158 기술개발테마현황분석 나. 시장환경분석 (1) 세계시장 MarketsandMarkets(2017) 에따르면산업용로봇은 2015 년 344 억 5,000 만달러에서 연평균 9.6% 씩증가해 2020 년 544 억 8,000 만달러에이를전망 [ 산업용로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 세계시장 37,750 41,380 45,350 49,700 54,480 59, * 출처 : MarketsandMarkets(2017) IFR 에따르면산업용로봇의생산량은 2005 년약 12 만대에서 2015 년약 25 만 4,000 대로 증가하며, 이후로연평균 13% 씩증가해 2019 년에는 41 만 4,000 대에이를전망 2005~2015 년까지는실제생산량을나타내고, 2016 년부터는전망치임 [ 2005~2019 년사이산업용로봇의세계생산량현황및전망 ] * 출처 : IFR World Robotics(2016) 150
 구분 16 17 18 19 20 21 CAGR 국내시장 40,199 42,209 44,320 46,536 48,862 51,306 5.")
159 산업용부상방지및작업지원로봇 (2) 국내시장 IFR에따르면산업용로봇의국내생산량은 2003년 4,660대에서 2015년 3만 8,285대로증가하며, 이후로연평균 5% 씩증가해 2019년에는 4만 6,000대에이를전망 세계산업용로봇시장의약 10~15% 규모 IFR(2016) 에따르면현재우리나라의산업용로봇시장규모는약 1조원으로추정됨 [ 산업용로봇분야의국내시장규모및전망 ] ( 단위 : 대, %) 구분 CAGR 국내시장 40,199 42,209 44,320 46,536 48,862 51, * 출처 : IFR World Robotics(2016) * 출처 : IFR World Robotics(2016) [ 2003~2015 년산업용로봇의국내생산량 ] 151
 부터 16 년 (0.")
160 기술개발테마현황분석 (3) 무역현황 산업용부상방지및작업지원로봇품목으로수출입통계가집계되지않아무역현황을분석하는데한계가있어제조업용로봇의수출입현황으로분석함 수출현황은 12년 4,661억원에서 16년 6,806억원수준으로증가하였으며, 수입현황은 12년 1,292억원에서 16년 3,990억원수준으로증가하여무역수지흑자폭이점차감소중 최근 5년 ( 12~ 16년) 간연평균성장률을살펴보면수출금액은 9.9% 증가하였으며, 수입금액은 32.6% 증가 무역특화지수는 12 년 (0.57) 부터 16 년 (0.26) 까지점차감소하고있는것으로나타나 수출특화상태가점차약해지고있는것으로분석됨 [ 제조업용로봇관련무역현황 ] ( 단위 : 억원, %) 구분 CAGR 수출금액 4,661 5,965 6,692 6,769 6, 수입금액 1,292 1,728 2,834 4,391 3, 무역수지 3,369 4,237 3,858 2,378 2, 무역특화지수 * * 무역특화지수 = ( 상품의총수출액 - 총수입액 )/( 총수출액 + 총수입액 ) 으로산출되며, 지수가 0 인경우비교우위는중간정도이며, 1 이면완전수출특화상태를말함. 지수가 -1 이면완전수입특화상태로수출물량이전혀없을뿐만아니라수입만한다는뜻 * 출처 : 2014 년로봇산업실태조사, 2016 년로봇산업실태조사 ( 한국로봇산업협회 ) IFR 에따르면 2015 년국내로수입한로봇은총 1 만 2,308 대로전년대비 44% 증가했으며, 해외로수출한로봇은 5,963 대로전년대비 44% 감소했음 2010 년에서 2015 년사이연평균증가율은수입 10%, 수출 36% 로조사됨 152
161 산업용부상방지및작업지원로봇 다. 기술환경분석 작업지원로봇의활용분야확대 최근육지자원의고갈이가속화되면서해양자원개발의중요성이커졌으며, 이에필수적인 해양로봇의개발증가 심해무인잠수정, 수중건설로봇등첨단해양장비개발들이활발히이루어지고있음 인공지능기반의해양로봇과사물인터넷기술이결합된수중통신망등핵심기술개발필요성증대 일반인이사용할수있는수중촬영로봇들도개발되어판매중 - 수중촬영로봇 비키 는중국로보시가개발한 1kg 정도의작은물고기로봇으로수심 50m 이상에서도정상작동이가능하며, 컨트롤러와신호가끊기면자동으로처음출발한자리로돌아와분실위험이적음 미세한작업을수행할수있는마이크로로봇과유연한작업에특화된소프트로봇의개발증가 노스캐롤라이나대와듀크대등이개발한마이크로로봇은세포하나를잡아옮길수있을정도로미세한작업이가능 - 10μm ( 마이크로미터 ) 크기의정육면체입자들로구성되어있고, 이입자의한쪽면에자석이삽입되어있어다양한형태로변경이가능 - 정육면체의입자배열이나개수를변경해세포를포획, 운반이가능 스탠퍼드대연구진은덩굴처럼뻗어나가는소프트로봇개발 - 재난구조나건물보수관리업무에사용 - 잔해더미들의틈을비집고들어가갇혀있는생존자를확인하거나물을공급할수있음 - 두루마리처럼감긴튜브형태이며, 한쪽끝에는펌프, 반대쪽끝에는카메라가부착되어있음 - 넝쿨식물이이동하는것처럼로봇이팽창해카메라가있는쪽으로이동 - 움직이는속도는사람보다빠른최대시속 35.4km에이르며원래몸길이의수천배까지뻗어나갈수있음 - 자기몸지름의 1/10 정도의틈으로들어가몸을팽창시키면 100kg의물체까지들어올릴수있으며, 몸으로케이블을감아끌어당길수도있음 농업용로봇개발확대 농업용로봇은사람이조작하는농기계또는사람의손을사용하여수행하는작업을무인화또는작업지원을도모하는기계시스템 차량계통로봇, 매니퓰레이터계통로봇, 시설계통로봇, 농사일지원장치로구분 153
162 기술개발테마현황분석 [ 농업용로봇의분류 ] 분류정의기계 차량계통로봇 매니퓰레이터계통로봇 논밭, 채소밭등에서작업을위해미리설정된경로를따라무인으로작업 주행하는농업용차량 사람의손이나간단한도구를사용하는농사일을대행하는로봇 로봇트랙터 토마토, 가지, 딸기, 양배추수확로봇 시설계통로봇낙농, 시설원예등농업시설에서이뤄지는작업공정을처리하는로봇 착유로봇 농사일지원장치 작업자의부담을경감시키기위한착용형 (wearable) 로봇 어시스트 수트 * 출처 : 농업용로봇개발과실용화사례 ( 한국과학기술정보연구원, 2015) 농사일지원장치 ( 착용형로봇 ) 은작업자및주변환경의상태파악을위한착용형시스템과가축의 상태파악을위한착용형시스템, 작업자의동작보조를위한착용형시스템으로분류 [ 농업용착용형시스템의예시및연구기관 ] 분류설명연구기관 작업자및주변환경상태파악용착용형시스템 가축의상태파악을위한착용형시스템 작업자의동작보조를위한착용형시스템 셔츠의양손목에가속도계를장착하고등에통신모듈을부착하여작업자의동작종류및수행빈도를수집 RFID를이용해작업자가사용하는농기구와농기계를파악하고, 손의움직임을감지할수있는센서를통해작업자의수행을파악 풍향및풍속을파악하기위한착용형센서개발 수확후수확물처리를위해농산물의표면에남아있는농약을실시간으로검출할수있는장갑개발 RFID를이용해송아지의개체데이터전송이가능한로봇포유기개발 밴드를신체에부착하여무릎과허리를펴는방향으로힘을가하는유연한착용형로봇개발 제동메커니즘기반의유연한착용형로봇 인도뭄바이대학일본규슈대학, 국립농업연구센터중국칭화대학미국캘리포니아대학, 호주연방과학산업연구소한국 다운일본북해도대학한국생산기술연구원 * 출처 : 농업과웨어러블기술 ( 로봇과인간, 2017) 154
163 산업용부상방지및작업지원로봇 3. 기업분석 가. 주요기업비교 세계산업용부상방지및작업지원로봇시장은점차확대되고있으나아직초창기수준이며, 국내산업의경쟁력은매우취약한상황 국내기업은첨단로봇기술에대한기술력부족과취약한가격경쟁력때문에자체기술로제작한로봇의수가많지않음 [ 활용분야별로봇및기업명 ] 구분업체명로봇활용분야국가 건설 액티브링크 철근운반어시스트로봇 공사현장에서철근운반 일본 건설 덕신하우징 데크플레이트해체로봇, 강판회수로봇 건설현장 한국 연구 빈크로스 Hexapod Robot 6족연구용로봇 중국 콘텐츠 DJI 인스파이어, 팬텀 ( 드론 ) 영상및사진촬영 중국 물류 ZMP 캐리어딜리버리 식품운송 일본 물류 MIT 재고관리용드론 재고관리 미국 농업 DJI 아그라스 MG-1( 드론 ) 방제작업 중국 농업 조지아텍대학 타잔 (Tarzan) 작물상태파악 미국 검사도시바수중조사로봇 수중조사 ( 방사능누출환경 ) 일본 검사 MIT 수도관검사로봇수도관누수정밀검사미국 검사한국로봇융합연구원용수공급관로검사로봇 용수공급관로비파괴정밀검사 한국 제조삼진웰텍 5 축용접로봇용접한국 탐사미항공우주국 (NASA) PUFFER 우주행성의생명체탐사 미국 탐사 라이신인텔리전트시스템 모기대응로봇 모기에국한된레이저공격로봇 중국 음식제조미소로보틱스플리피 (Flippy) 햄버거제작및주방업무보조 미국 음식제조보쉬 (Bosch) APAS Assistant 커피 / 솜사탕제조등독일 음식제조 초보틱스 (Chowbotics) 샐리샐러드제조미국 155
164 기술개발테마현황분석 국내중소기업사례 경인테크는현재방산사업및민수사업두가지분야를병행하고있는데방산부문에서는유도로켓용 / 유도탄용구동장치와 MLRS용발사대구동장치및무인초견로봇의매니퓰레이터연구개발을수행중이며, 민수부문의원자력로봇, 한국형인공위성발사체의 3단엔진연소시험설비등의연구개발을수행중. 2007년한국산업기술진흥협회로부터기업부설연구소를인정받는등산업용로봇분야의우수기업으로평가되고있음 드림씨엔지는대한민국발명특허대전은상및스위스제네바발명전시회금상등을수상한우수기업으로일반형및로봇형산업청소기제품을판매중임. 최근에는자체개발한 ' 지능로봇노면청소기 ' 제품을주력으로싱가포르에이어터키시장까지진출한상황임. 또한국내유일의소형노면로봇청소기제조기업으로세계최초로 ' 노면로봇청소기 ' 제조업타이틀을획득 로봇밸리는핸들링로봇시스템 / 용접로봇시스템 / 도장로봇 / 박판정용용접장치등로봇자동화시스템분야기술을제공하는기업으로 2015년에는 'KWASAKI ROBOT Global Partner 세계 Top 10 Award' 를수상한우수기업임. 또한로봇자동화시스템분야에대한다수의특허를보유하고있음 사이보그랩은조선용소형 6축수직다관절형로봇 ( 용접및 Handling) 을비롯하여 LNG선의멤브레인용접용로봇 (Plasma 용접케리지 ), 이를이송시켜주기위한벽면을타고다니는 Spider 로봇등다양한형태의로봇을개발공급을통해선박및특수환경용자동화사업분야에진출중. 특히클린환경용자동화사업분야에서자체개발한 7~8세대용마크로검사용로봇은세계최초의개념으로개발하여공급중 제타크리젠은 2006년설립후핵심기술력을바탕으로국내최초로수중청소로봇을독자적으로개발하였으며, 산업용수중청소로봇, 수영장수중청소기, Harmsco 필터하우징등다수의산업로봇제품을제공중. 현재대전시립수영장, 대명비발디파크리조트등 40여개의업체에제품시설을공급중 월성티엠피는방사능물질시험및취급용특수목적용로봇개발제조기업으로한국원자력연구원, 국방과학연구소, 한국산업단지공장등다수의산 / 학 / 연기관들과협력체계를통해기술개발중. 2013년미래창조경영우수기업선정및 2014년산업혁신 3.0 1차년도사업우수기업선정등특수목적용로봇제품군의우수한기술력을인정받고있음 [ 주요중소기업비교 ] ( 단위 : 백만원,%) 국내업체자산총계매출액 매출액증가율 영업이익율당기순이익율 R&D 집중도 경인테크 18,068 32, 드림씨엔지 ) 로봇밸리 6,788 3, 사이보그랩 3,428 1, 제타크리젠 ) 월성티엠피 1, ) 2014 년 R&D 집중도 4) 2015 년 R&D 집중도 156
165 산업용부상방지및작업지원로봇 나. 주요업체별기술개발동향 (1) 해외업체동향 미국 미국미소로보틱스 (Miso Robotics) 와캘리버거가협력해햄버거제작로봇플리피 (Flippy) 개발 플리피는기존협동로봇에햄버거를제작할수있는그립퍼를개조해장착함 비전카메라와센서, 딥러닝소프트웨어를통해기존주방설비의변경없이음식재료를찾고햄버거패티를뒤집어조리할수있으며, 재료의온도와조리시간을인공지능으로추적해근무자에게알림을전송 햄버거뿐만아니라치킨, 채소자르기, 플레이팅등다양한주방업무를보조하도록프로그래밍가능 미국초보틱스 (Chowbotics) 는고객의주문대로샐러드를만들어주는 샐리 개발 UC샌디에이고연구팀은자갈밭이나모래밭과같은거친지형을보행할수있는 4족보행소프트로봇개발 부드러운소재와딱딱한소재를함께고성능 3D프린터로처리해지형변화에따라탄력적이고빠르게대처할수있음 3개의병렬구조챔버 (Chamber) 가서로연결되어있으며챔버가부풀면서동력을얻을수있음 재난지역에투입되어관련데이터와이미지를수집하는데활용가능 미국항공우주국은접이식탐사로봇 PUFFER 개발 PUFFER는종이접기에서영감을얻어제작된접이식탐사로봇으로다양한형태로몸체를접을수있음 화성과목성의위성유로파의생명체탐사를위해디자인되었으며, 2020년화성탐사에보내질예정 다양한극한상황에적응하도록설계되었고, 초경량, 저비용, 소형이라는장점이있어우주선이나탐사선을통해쉽게운반가능 미국카페 X 테크놀로지스 (Cafe X Technologies) 는바리스타로봇을개발해카페 X 에적용 일본의미쓰비시에서만든다관절로봇 RV-F 을활용해주문에맞는커피를만들어내며, 주문에서 제조까지걸리는시간은 22~55 초정도소요 157
166 기술개발테마현황분석 중국 중국 DJI는농업, 촬영등개별작업에최적화된지능형드론을개발, 판매중 ' 아그라스 MG-1, ' 아그라스 MG-1S' 등농약살포전용드론을판매 - 최대 10l의농약을 10분만에 4,000~6,000m2규모의농지에살포가능 팬텀, 인스파이어 등영화촬영및사진촬영전용드론은능동적인장애물회피와정밀한컨트롤로극적인장면연출이가능 중국라이신인텔리전트시스템은레이저기반모기대응로봇개발 공공장소, 농지, 실내등에서사용되는모기제거용로봇으로주변사물및인체, 동물등에해를 가하지않고통제된레이저공격을할수있음 중국빈크로스는거리측정센서, 적외선송신기, 3축가속도계를장착한 6족연구용로봇 Hexapod Robot 개발 얼굴및음성인식, 기계학습알고리즘을보유하고있으며, 모든가전을제어할수있는적외선송신기장착, 장애물회피, 프로그래밍없이도움직임을제어가능 일본 일본액티브링크는공사현장에서무거운철근을운반하기쉽게도와주는철근운반어시스트로봇개발 인력난이예상되는건설현장의생산성을향상하기위해암 (ARM) 형태의로봇이인간대신무거운철근을운반 로봇을현장의철골기둥에고정한후, 손에해당하는파츠로철골을잡아서들어올리고정해진장소에철근을배치할수있으며, 조종자는기계끝에있는그립을움직여조작가능 철근배치의필요인원은평균 7명이지만로봇을도입하면보조인원 2명만으로도가능 시미즈건설은로봇의시공성을검증한뒤현장에본격적으로도입할계획 일본 ZMP는드론으로운반이어려운식품을운송할수있는 캐리어딜리버리 를개발해실증실험개시 초밥을배달하는택배로봇으로최대 100kg까지실을수있으며, 초밥 60인분을배송할수있음 길이 1m 30cm, 높이 1m, 시속 6km로달릴수있으며, 주문한사람이스마트폰애플리케이션으로받을위치를지정하면그앞으로자동배송 158
167 산업용부상방지및작업지원로봇 일본도시바와국제폐로연구개발기구 (IRID) 는수중조사로봇을개발해후쿠시마제1원자력발전소 3호기에투입 후방에전후진용스크류 4개, 몸통부분에승강스크류 1개를탑재해초당 5cm의속도로이동이가능하며물이차있는 3호기에들어가녹아내린핵연료파편을조사 2대의카메라가촬영을담당하며방사선선량계와조명장치를탑재해데이터를수집할수있음 유럽 독일보쉬는커피 / 솜사탕제조등의서비스용으로활용이가능한제조로봇 APAS Assistant 개발 민감한센서스킨이장착되어로봇에게사람이접근하면작업을중단하며, 3D 이미지처리시스템을탑재해작업대상을식별할수있음 모바일터치패드기반으로프로그래밍없이교시가능 뉴질랜드박스피시리서치는수중감시로봇 Boxfish Rov 개발 해양과학, 영화, 교육등에사용되는탐사촬영용 4K 카메라를장착한미니잠수로봇으로, 최대 수심 1,000m 까지잠수가가능하며, 수면근처에서무선제어가가능 159
168 기술개발테마현황분석 (2) 국내업체동향 국내덕신하우징은한국로봇융합연구원과함께건설현장에적용되는 데크플레이트볼트해체로봇 과 강판회수로봇 을개발할예정 로봇을통한무인화가가능할것으로예상되며, 향후지상작업형이아닌천장부착작업용건설로봇개발에도착수 국내삼진웰텍은용접작업에특화된 5축용접로봇을개발해자동화솔루션제공 숙련된용접인력들이지속적으로줄어드는상황에서높은기술력과낮은가격을바탕으로중소규모의기업을대상으로자동화솔루션제공 직관적인티칭방식을통해짧은교육시간으로도직접로봇을운용할수있음 국내 BAT 는건축과인테리어제작에로봇을사용하며실제현장에서적용중 로봇을이용해벽돌벽을쌓거나스티로폼을절삭하고점토를적층해구조물을빚는공정등을진행 건축분야에맞는로봇제어소프트웨어 (GERTY) 를직접개발해건축에적용 해양수산부는국내기술만으로수중건설로봇을개발하고시제품테스트완료 500~2,500m 깊이의바다속에서시설매설, 해저지면고르기등시설설치를위한수중작업을장시간수행할수있는장비수요급증 2013년부터해양개발용수중건설로봇개발사업을추진해 2017년주요부품성능을확인 2019년까지실제해역테스트와실증검증을진행해개발을완료하고 2021년부터는실제로가동예정 160
169 산업용부상방지및작업지원로봇 [ 국내외중요기업동향 ] 회사명국가설립연도관련동향 Dual-Arm Power Amplification Robot(MS-2) 개발 액티브링크일본 2003 Power Loader Light(PLL-04, Ninja) 개발 Power Jacket(REALIVE) 개발 어시스트수트 (AWN-03) 개발 ZMP 일본 2001 ADAS(Advanced Driver Assistance System) 표준에 대응하는 자체 플랫폼개발 제조및물류분야에서의자동화솔루션개발 로봇을이용한물류이송방법개발 티칭요소개발 도시바 ( 도시바기계 ) 일본 1939 원전해체용로봇개발 휴머노이드로봇개발 수직다관절로봇개발 덕신하우징한국 1980 데크플레이트볼트해체로봇과강판회수로봇을개발중 민간드론시장의약 70% 를점유하고있는드론전문업체 DJI 중국 2006 팬텀, 인스파이어, 매빅, 스파크등민간드론뿐만아니라산업용드론도출시 영화촬영용드론, 건설현장용드론, 인명구조용드론, 방제용드론등을출시하며다양한분야로영역확대중 161
170 기술개발테마현황분석 4. 기술개발현황 가. 기술개발이슈 금속가공용제조로봇들의발전 금속의절삭가공기계들은수동식, NC, CNC 방식을거쳐현재는다축화가진행중 수직다관절로봇이직접절삭가공작업을수행하기시작 워크스테이션의물리적제약을벗어나대형부품을쉽게제조할수있고, 이동작업에도용이하며, 작업자가필요하지않아다양한작업환경하에서작업이가능 ACL 오토모티브에서는한라인에서두가지버전의생산을위해수직다관절로봇두대를사용 국내에서도로봇을이용한절삭가공애플리케이션이증가중 다양한산업현장에서의활용성증대 중국에서는전통적제조업뿐만아니라도자기욕실용품산업에서도활용하기시작 도자기욕실용품생산과정중유약분무공정은인력을통해작업이이뤄지며, 작업환경이열악하고 노동강도가높으면서도결과물의품질은낮아로봇을이용한작업으로점차전환되고있는중 드론을이용한방제작업증가 대동공업은 DJI의 아그라스 MG-1', ' 아그라스 MG-1S' 를사용한방제작업솔루션제공 - 최대 10l의농약을 10분만에 4,000~6,000m2규모의농지에살포가능 - 농업관리플랫폼을사용해작업을쉽게계획하고실시간으로비행을관리하며, 기체의작동상태를자세히알수있음 MIT 연구팀은 RFID를스캔하는드론기술과수도관의누수위치를파악하는로봇파이프가드개발 RFID를이용한재고관리는지금까지사람이일일이 RFID 태그를스캐너로찍어정보를확인하고분류했기때문에작업자의실수로인한오류가많음 현재는드론조종자에의해동작하지만자율주행이가능한시스템을개발하는것이목표 셔틀콕모양의파이프가드는소화전을통해배관에삽입되어물의흐름에따라배관내부를움직이며, 누수위치를파악하고전송 멤브레인센서, 플렉시블지지대, 로봇하우징등세부분으로구성되어있으며, 기존누수탐지장비의 1/10 크기에불과함 수도관내에서빠르게움직일수있으며파이프의재질에상관없이사용가능 162
171 산업용부상방지및작업지원로봇 미국조지아텍대학연구진은줄을타고다니는농업용로봇타잔 (Tarzan) 개발 타잔은대규모의농장에서작물의상태를파악하기위해사용되며, 갈고리모양의두팔을번갈아움직이며줄을타고카메라로작물들의영상을찍어전송 농업용드론을활용해작물상태를파악할수있지만, 작물에보다가까이접근하기위해서는타잔같은로봇이필요 한국로봇융합연구원 (KIRO) 에서는용수공급관로비파괴정밀검사로봇개발착수 대규모용수공급관로검사는사람이직접초음파두께를측정하고육안으로용접부결함을탐상했기때문에신뢰도가부족 검사로봇은대규모용수관로내 외부를이동하면서부식에의한두께변화, 누수, 결함등관의구조적인상태를확인 검사의신뢰도확보가가능해지며, 단수및도장재제거등의부가절차를간소화할수있어조사기간은 1km당 52일에서 8시간, 비용은 5.12억원에서 1억원대로절감이가능할것으로전망 충주시는전자동로봇포유기를개발해시범사업추진 로봇포유기는자동으로송아지의포유및이유와개체별정밀영양관리가가능 포봇포유기를이용하면포유기간이 14일정도단축되고, 송아지의질병발생도일반농가대비 50% 감소 포유기 1대로 20~30두의포유관리가가능해노동력과시간을대폭절감할수있어사육농가의소득증대에기여가능 163
172 기술개발테마현황분석 나. 특허동향분석 산업용부상방지및작업지원로봇특허상주요기술 주요기술 산업용부상방지및작업지원로봇과관련된기술은로봇구조및그래스퍼, 이동플랫폼및환경인지기술이있으며, 로봇구조및그래스퍼기술은구조설계기술, 센서기술, 기구메커니즘기술, 그래스퍼기술로구분됨. 또한이동플랫폼에대한기술은이동메커니즘, 가변기구메커니즘, 전력공급기술로구분되며, 환경인지기술은 2D, 3D 환경인기기술로구분됨 분류요소기술설명 구조설계기술 중량물핸들링을위한자유도를가지는관절구조에대한설계기술 로봇구조및그래스퍼기술 센서기술 기구메커니즘기술 각종센서를활용한매핑 ( 지도작성 ) 및주변물체인식, 환경측정용센서기술 작업지원을위한제어기술, 로봇의테스크수행통합제어기술및원격제어, 시간지연, 예외처리를위한통합운용소프트웨어기술 그래스퍼기술 다양한모양의물체를파워그래스핑할수있는그래스프설계기술및동작범위와효율을고려한복합구조의로봇설계및제작기술 이동플랫폼 환경인지기술 이동메커니즘가변기구메커니즘전력공급기술 2D, 3D 환경인지 고하중플랫폼구동용정밀구동드라이버, 고속고토크모터구동바퀴, 캐터필러, 관절설계및이의가감속제어기술과플랫폼실시간자세인식 / 제어기술 환경인식기반 장애물 분류를 통한 승월가부 판단 기술 및 바퀴, 캐터필러, 관절의 구조변경 및 이동부 구조변경에 따른 플랫폼 위치 변경기술 엔진출력의동력전환, 효율적인베터리충방전및엔진 / 베터리기반유압생성과융합구동력발생기술 작업상황파악을위한영상을획득하고시점을동기화하여영상을디스플레이. 가시권외제어를위한데이터기반원격지영상구성및보강기술 164
173 산업용부상방지및작업지원로봇 세부분야별특허동향 주요기술별국가별특허동향 산업용부상방지및작업지원로봇에대한요소기술별주요국가별특허정보데이터입수하였으며, 최근 10 년간의특허데이터를비교분석함 분류요소기술한국미국일본유럽계 구조설계기술 로봇구조및그래스퍼기술 센서시스템기술 기구메커니즘기술 그래스퍼기술 이동메커니즘 ,009 이동플랫폼 가변기구메커니즘 전력공급기술 환경인지기술 2D, 3D 환경인지 합계 1,363 1,218 1, ,840 국가별요소기술별특허동향에서는이동메커니즘기술이다른기술들에비해특허출원건수가가장많았으며, 그다음으로는 2D, 3D 환경인지기술, 전력공급기술, 가변기구메커니즘기술이특허출원건수가많았음 이동메커니즘시스템은일본이가장많은출원량을보유하고있으며, 유럽이상대적으로적은출원량을보유하고있음 이외에다른모든요소기술에서도일본이가장많은출원량을보유하고있고유럽이상대적으로적은출원량을보유하고있음 이에따라, 산업용부상방지및작업지원로봇에대한기술은일본에서가장활발한연구가이루어지고있음을알수있음 165
174 기술개발테마현황분석 세부분야 요소기술 기술집중도 주요출원인 INTUITIVE SURGICAL 국내특허동향 대학교, 공공연구기관중심 구조설계기술 KUKA Roboter 한국생산기술연구원 NABTESCO 한국생산기술연구원, 에스지메카트로닉스등 센서시스템기술 The Johns Hopkins Univ. 대학교, 공공연구기관중심 국내중소기업 로봇구조및그래스퍼 기구메커니즘기술 SICK YASKAWA ELECTRIC NIDEC SANKYO 현대자동차, 대우조선해양, 삼성중공업등대기업중심 NIDEC SANKYO 그래스퍼기술 APPLIED MATERIALS PLEX INTERNATIONAL DESIGN YASKAWA ELECTRIC 이동메커니즘 HONDA MOTOR SEIKO EPSON TOYOTA MOTOR 이동플랫폼 가변기구메커니즘 IROBOT PANASONIC FANUC 전력공급기술 ABB PANASONIC ABB 환경인지 2D, 3D 환경인지 YASKAWA ELECTRIC SEIKO EPSON 주요기술별출원인동향 : 1,000건이상, : 750~999 건, : 500~749 건, : 250~499 건, : 250건미만 삼성전자, 현대자동차등대기업중심 로봇앤드디자인, 미래컴퍼니, 대학교등 현대중공업, 엘지전자, 삼성중공업등대기업중심 대학교출연연등 삼성전자, 엘지전자등대기업중심 삼성중공업 한국과학기술연구원등 한국전자통신연구원, 삼성중공업, 삼성전자등 166
175 산업용부상방지및작업지원로봇 로봇구조및그래스퍼분야주요출원인동향 구조설계기술에서는 INTUITIVE SURGICAL가가장많은특허를보유하고있으며, 센서시스템기술에서는 NABTESCO, 기구메커니즘기술에서는 YASKAWA ELECTRIC, 그래스퍼기술에서는 APPLIED MATERIALS가가장많은특허를보유하고있음 국내에서는대학교및공공연구기관을중심으로구조설계및센서시스템, 대기업을중심으로기구메커니즘, 그래스퍼기술에대한연구개발이이루어지고있음 이동플랫폼분야주요출원인동향 이동메커니즘기술에서는 YASKAWA ELECTRIC이가장많은특허를보유하고있으며, 가변기구메커니즘기술은 TOYOTA MOTOR, 전력공급기술은 FANUC가가장많은특허를보유하고잇음 국내에서는대학교, 공공연구기관및대기업을중심으로이동메커니즘, 가변기구메커니즘, 전력공급기술에대한연구개발이이루어지고있음 환경인지분야주요출원인동향 2D, 3D 환경인지기술에서는 ABB 가가장많은특허를보유하고있으며, 국내에서는대학교, 공공연구기관및대기업을중심으로 2D, 3D 환경인지기술에대한연구개발이이루어지고있음 산업용부상방지및작업지원로봇분야의주요경쟁기술및공백기술 산업용부상방지및작업지원로봇분야의주요경쟁기술은이동메커니즘, 가변기구메커니즘, 전력공급기술, 2D, 3D 환경인지, 기구메커니즘기술로나타남 인간친화형협동로봇분야에서이동메커니즘기술이가장치열한분야이고, 구조설계기술, 센서시스템기술, 그래스퍼기술분야는아직까지출원이활발하지않은공백기술분야로나타남세부분야요소기술기술집중도 구조설계기술 로봇구조및그래스퍼기술 센서시스템기술 기구메커니즘기술 그래스퍼기술 이동메커니즘 이동플랫폼 가변기구메커니즘 전력공급기술 환경인지 2D, 3D 환경인지 : 1,000 건이상, : 750~999 건, : 500~749 건, : 250~499 건, : 250 건미만 167
176 기술개발테마현황분석 최신국내특허기술동향 분류요소기술최근핵심요소기술동향 관절구동기를사용하지않는로봇의관절구조설계기술 로봇구조및그래스퍼기술 이동플랫폼 환경인지 구조설계기술센서시스템기술기구메커니즘기술그래스퍼기술이동메커니즘가변기구메커니즘전력공급기술 2D, 3D 환경인지 관절구조를최적화하고, 기계적마찰을저감또는조절할수있는설계기술 세밀한작업수행을위한촉각센서기술 임의의방향의외부충격을감지하는감지센서기술 구동력을강제로차단하여구동을정지시키는메커니즘기술 계단또는장애물을극복하는메커니즘기술 물체의경도에따라그립력을제어할수있는세밀한구동제어를가능하게하는기술 다중출력차동기어로부터전달되는구동력을강제적으로차단하는기술 곡선의이동경로로이동할수있는기술 장애물회피또는극복기술 무선전력전송기술및수중전력전송기술 소규모발전기부착및에너지절감형기술 3차원공간인식을통한목표물파악기술 영상정보를이용하여이동체의위치를인식하고궤적을추출하는기술 ( 이동체의궤적 ) 최근국내에출원되는특허를통해기술동향을살펴보면, 산업용부상방지및작업지원로봇에대한요소기술대부분은대학교공공연구기관및대기업을중심으로연구개발이이루어지고있는것으로나타남 구조설계기술에서는관절구동기를사용하지않는로봇의관절구조설계기술, 관절구조를최적화하고기계적마찰을저감또는조절할수있는설계기술이개발되고있는것으로나타남 센서시스템기술에서는세밀한작업수행을위한촉각센서, 임의의방향의외부충격을감지하는센서에대한기술이개발되고있는것으로나타남 그래스퍼기술에서는물체의경도에따라그립력을제어할수있는세밀한구동제어를가능하게하는기술이개발되고있는것으로나타남 중소기업특허전략수립방향및시사점 산업용부상방지및작업지원로봇분야의공백기술분야는구조설계기술, 센서시스템기술, 그래스퍼기술로나타남 인공지능기술이 4차산업혁명과접목되어공장자동화가진척되면서, 위험한산업분야에서사람을대체하여로봇을이용하려는수요가꾸준히늘고있어, 부상방지및작업지원로봇에대한연구가진행되고있음 168
177 산업용부상방지및작업지원로봇 다만, 대부분의부상방지및작업지원대부분의산업용부상방지및작업지원로봇은대기업에서제조하여판매하고있기때문에중소벤처기업의참여가높지는않은분야임 구조설계기술, 센서시스템, 그래스퍼기술은공백기술로나타났지만, 이미많은특허가존재하기때문에특허를확보하기위한전략이필요할것으로판단됨 향후중소기업은공백기술분야이면서대학교, 공공연구기관에서활발히연구개발을하고있는기술을이전받거나공동연구개발을진행하여제품화하는방향을우선적으로고려해볼수있을것으로사료됨 169
178 기술개발테마현황분석 5. 연구개발네트워크 가. 연구개발기관 / 자원 연구개발기관 산업용부상방지및작업지원로봇분야주요연구개발기관 전자부품연구원 ( 황정훈책임연구원 ) - 다양한실제환경 ( 비정형환경 ) 에서극한작업 ( 재난, 원전등 ) 을신속하게수행하는시각 (Vision) 가이드기반원격제어솔루션을개발 - 다중 / 이종센서 (2D/3D 카메라, 레이저거리측정센서 ) 동기화기술및분산연동기술개발 - 3D 재구성기술기반의임의시점에대한 HD급실시간다중 View 영상솔루션으로정밀원격제어가능 - 주행경로가이드및거리정보제공에따른조작편의성제공 한국생산기술연구원융합생산기술연구소로봇그룹 ( 그룹장이동욱 ) - 필드로봇솔루션기술, 인지기반로봇지능및인간로봇상호작용기술, 원격작업을위한원격로봇핵심원천기술, 중소제조업용로봇융합공정기술, 생체모방형수중 수륙양용로봇시스템기술개발 한국생산기술연구원 ( 원장이성일 ) - 해양로봇센터와로보스텍이공동으로개발한 원격조정무인잠수정 (ROV) 이잠수부와협업하여해저교각검사에투입되는실증테스트돌입 한국로봇융합연구원 ( 원장박철휴 ) - 산업현장적용로봇의부품기술개발및인간 로봇작업공조기술개발 - 용접공정용원격제어기반로봇시스템, 표면후처리공정용원격제어기반로봇시스템개발 - 산업현장및해상사고현장적용가능한해양로봇기술개발 차세대융합기술연구원스마트시스템연구소 ( 소장홍성수 ) - 극한환경로봇연구실 : 인간의활동이극도로제한을받는고방사선 ( 성 ) 환경과같은극한환경에서의작업등을수행하는로봇시스템연구개발 한국과학기술연구원로봇연구단 - NBIC 기술융합 ( 나노, 바이오, 정보통신및인지과학기술의융합 ), 로봇기술, 가상현실기술, 인간-컴퓨터상호작용기술을통해실감교류로보틱스및실감인터랙션기술개발 - 가정및작업장에서자율적으로작업하는인지휴머노이드로봇 선박해양플랜트연구소해양시스템연구부 - 수중작업및조작을위한원격조작 (Telerobotics) 기술개발, 수중환경인식 항법 SLAM 등로봇지능기술개발, 특수목적수중로봇시스템및실용화기술개발, 무인수상선의자율기술개발 - 해저탐사및작업을위한알고리즘및시스템 SW 기술, 수중건설작업을위해수중로봇에공통적으로적용이가능한 Smart ROV 공통기반기술, 수중건설현장의고정밀매핑기술등개발 170
179 산업용부상방지및작업지원로봇 경인테크 - 해양수산부가선박해양플랜트연구소와함께개발한다관절해저보행로봇 크랩스터 의기술을이전받아상용화 - 원전고방사선구역작업환경모니터링로봇시스템개발에도참여 주식회사로비텍 - 하드웨어기반의로봇플랫폼을제공하며안내및위험작업등에사용되는로봇플랫폼기술개발 - 감지및인지기술, 인간로봇상호작용, 제어, 로봇지능, 기구등다양한기술이접목되어고유한기능을수행하는여러컴포넌트및모듈로구성됨 제타크리젠 - 산업용수중청소로봇 크레보 시리즈및자동수중청소기등을개발 와이에스티티 (YSTT) - 자율주행로봇과협업로봇을기반으로로봇자동화솔루션을제공하는업체 - 이동을도와주는고정설비가필요하지않고, 다양한산업현장에유연하게대응할수있어작업내용변경도신속히가능. 장애물이나작업자를인지하고스스로주행경로를학습한뒤재설정해능률적으로임무수행 큐렉소 (CUREXO) - 로보닥 (ROBODOC) 시스템은정형외과슬관절전치환술 (TKA) 과고관절전치환술 (THA) 을위한수술로봇으로의사가수립한계획에따라로봇이뼈를절삭하도록되어있고, BMM(Bone Motion Monitor, 움직임제어장치 ) 기능이있어환자의움직임이감지될경우로봇이동작을멈추어환자움직임에따른오차를방지 연구개발자원 국가연구개발지원사업 중소벤처기업부 - 중소기업기술혁신사업 - 상용화기술개발사업 ( 구매조건부등 ) - 융복합기술개발사업 - 산학연협력기술개발사업 - 제품서비스기술개발사업 - 중소기업 R&D 역량제고사업 - 제품 공정개선기술개발사업 - 맞춤형기술파트너지원사업 - 산연전용과제 : 우수 R&D 인프라를활용한대표적인중소기업지원연구기관으로연구부서와중소기업간연계를통한기술지원은물론변리사, 산학연협력코디네이터, 기술거래사, 기술가치평가사등기술사업화관련전담인력이사업화사안마다관여해고품질비즈니스컨설팅제공 171
180 기술개발테마현황분석 산업통상자원부 - 에너지 자원기술개발사업 - 전략핵심소재기술개발사업 - 신재생에너지기술개발사업 - 산업융합원천기술개발사업 - 로봇미래전략 (2013~2022) - 산업엔진프로젝트 (19대미래성장동력 ) - 사업화연계기술개발사업 ( 민간투자연계형등 ) 환경부, 국토교통부, 해양수산부 - 글로벌탑환경기술개발사업 - 건설기술연구사업 - 해양생명공학기술개발사업 로봇산업정책협의회 - 창의적 도전적로봇연구촉진을위한풀뿌리지원프로그램 한국로봇산업진흥원 - 로봇산업클러스터 : 센터와장비를구축하고, 기술사업화촉진및로봇창업맞춤형지원과상용화기술개발지원을통해의료, 사회안전, 제조분야의로봇산업육성을목표로함 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등맞춤형기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 172
181 산업용부상방지및작업지원로봇 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원 ) - e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 지능형로봇테스트베드 ( 한국전자통신연구원 ) - 지능형로봇테스트베드에서로봇시험장비및인프라구축, 로봇시험평가방법개발및시험인증체계구축, 로봇시험평가방법개발및시험인증체계구축, 지능형로봇시험지원서비스제공 173
182 기술개발테마현황분석 나. 연구개발인력 산업용부상방지및작업지원로봇분야는선박해양플랜트연구소, 한국과학기술연구원, 전자부품연구원, 한국로봇융합연구원, 차세대융합기술연구원, 한국기술교육대학교에서주로 연구개발을진행하고있음 정부는개방형로봇산업생태계조성을위해인력양성측면에서多기술영역업무수행및 다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형 로봇전문인력양성추진 [ 산업용부상방지및작업지원로봇분야주요연구조직현황 ] 기관선박해양플랜트연구소한국과학기술연구원전자부품연구원한국로봇융합연구원차세대융합기술연구원한국기술교육대학교인하대학교숭실대학교경상대학교 174
183 산업용부상방지및작업지원로봇 다. 기술이전가능기술 (1) 기술이전가능기관 산업용부상방지및작업지원로봇의요소기술은크게구조설계기술, 로봇의태스크수행 통합제어기술, 그래스퍼, 이동메커니즘, 2D 3D 환경인지의총다섯개의분류로구분됨 기술이전이가능한기관은선박해양플랜트연구소, 한국과학기술연구원, 한국생산기술연구원, 한국과학기술원, 한국기술교육대학교, 인하대학교, 경상대학교가있음 [ 산업용부상방지및작업지원로봇분야연구조직 ] 분류요소기술기관 구조설계기술 로봇의태스크수행통합제어기술 마이크로조립용다자유도원격조종로봇시스템 초고압활선송전선로의고속자동점검을위한원격로봇기술개발 수중장비용무선전력및데이터송수신장치 한국과학기술연구원 한국과학기술연구원 한국생산기술연구원 로봇손과팔을이용한물체조작기술 한국과학기술연구원 그래스퍼 다자유도중력보상작업보조로봇 경상대학교 텐션조절이가능한케이블메커니즘을이용한로봇그리퍼 한국과학기술원 이동메커니즘 복수의다리를갖는이동로봇 다리겸용로봇팔과다수개의관절을갖는 6 족보행로봇 인하대학교 선박해양플랜트연구소 2D, 3D 환경인지 험지탐사용가변형볼로봇한국기술교육대학교 175
184 기술개발테마현황분석 (2) 이전기술에대한세부내용 분류 기술명 세부내용 마이크로조립용다자유도원격조종로봇시스템 기술이전목적및필요성 인간조작자의다자유도관절운동정보를추출하여전기적신호로변환하는다자유도교시수단과상기추출된다자유도운동정보를네트워크장치를통하여로봇으로전송하기위한처리수단, 상기전송된다자유도운동정보를받아다자유도운동을위한제어신호로변환하는마이크로로봇제어수단, 상기변환된다자유도운동제어신호에따라구동하기위한다자유도마이크로로봇구동수단, 마이크로부품조립환경의시각적인정보를효과적으로제공하기위한마이크로비전수단, 상기원격제어처리수단으로부터전송된다자유도운동정보를그래픽영상으로생성하기위한그래픽영상생성수단및상기마이크로비전수단으로부터의작업영역시각정보를실제영상으로표시하며, 상기그래픽영상생성수단으로부터의그래픽영상을가상영상으로표시하기위한영상표시수단을포함하는마이크로조립용다자유도원격조종로봇시스템을제공함 기술활용방안및기대성과 마이크로조립용다자유도원격조종시스템을통하여인간작업자손끝의운동및힘을수천분의 1 내지수만분의 1로축소함으로써수미크론 (um) 이하정밀도의미세부품의조립작업이가능함 미세수술및원격진단등의의료시스템, 미세조작이필요한분야, 초소형정밀모터, 광부품등의다자유도의마이크로조립시스템분야에적용이가능함 기술관련 세부문의 한국과학기술연구원 계약관련 176
185 산업용부상방지및작업지원로봇 분류 기술명 세부내용 초고압활선송전선로의고속자동점검을위한원격로봇기술개발 기술이전목적및필요성 초고압 (345kV) 활선송전선로의이상여부를원격점검하기위한송전선위를원격제어및자율이동가능한로봇기술 송전선로상의금구류를극복하고원격제어를통해안전하게이동가능한무인로봇시스템의개발 디지털카메라를이용한영상기반송전선로원격점검기술및무선전송기술, 활선상태에서의원활한작동을위한차폐기술, 원거리운용이가능한원격운용시스템및통합기술의개발 기술활용방안및기대성과 본기술은송전선로의경사, 장애물 ( 스페이스, 댐퍼, 슬리브 ) 및진동극복가능한이동메커니즘및제어기술임 활선에서작동가능한차폐및등전위기술개발 : 도전, 연자성재료를이용한 345kV/1200A 전자계차폐시험완료 원거리운용이가능한원격운용시스템및통합기술개발 : 1km 운용가능한통신모듈및원격모니터링시스템 디지털카메라영상기반송전선로원격점검기술및무선전송기술개발완료 : 6대의 CCD 카메라를이용한전력선및장애물 ( 스페이스, 접속개소, 댐퍼등 ) 이상유무점검가능 초고압 (345kV) 활선송전선로 2도체, 4도체에적용이가능함 세부문의 기술관련 한국과학기술연구원 177
186 기술개발테마현황분석 분류 기술명 로봇손과팔을이용한물체조작기술 세부내용 기술이전목적및필요성 여유자유도를갖는로봇팔과손, 상반신형양팔로봇을이용한물체조작제어기술 인간의동작분석, 무게중심및 ZMP 등시스템의안정성과균형에관련된정보획득. 해당결과를바탕으로상반신양팔로봇에사용가능한무게중심제어기및 Planner 무게중심모멘트최소화알고리즘및준정적상태에서로봇이필요로하는토크를줄이기위한중력최소화알고리즘 다양한서비스요구에맞게개발되는고기능로봇손을이용한물체의안정한파지-조작기술및물체를안정적으로파지-조작할수있는협조제어기술개발 사람의대항성 (Opposition) 원리에기초한파제제어알고리즘기술 기술활용방안및기대성과 기구적으로결합된로봇손과팔시스템을단일한제어기를사용하여제어가능함 사람의상반신과같이몸통과양팔을갖고있는로봇시스템에대해사람의무게중심 (CoM) 데이터를이용한밸런스플래너를가짐 직접교시에의한작업구현이가능함 작업형서비스로봇분야및산업용로봇에적용이가능함 세부문의 기술관련 한국과학기술연구원 178
187 산업용부상방지및작업지원로봇 분류 세부내용 기술명 복수의다리를갖는이동로봇 기술이전목적및필요성 본기술은주변지형에따라이동방법이변경되는로봇에관한것으로, 더욱상세하게는로봇의동작을제어하는제어부와, 상기제어부를수용하는본체부와, 상기본체부에장착되며주변지형을감지하는지형감지부와, 상기본체부의양쪽측면에형성되며, 상기지형감지부에의해감지된지형에따라상기제어부에의해상기로봇의이동형태를변경시키는복수의관절을갖는복수의다리로구성되어주변지형에따라이동방법이변경되는로봇을제공함 기술활용방안및기대성과 이동로봇에복수의관절과바퀴를구비한복수의다리와지형감지부를설치하여, 지형감지부에의해감지된지형에따라이동로봇의이동방법을변경하여, 모바일로봇이갖는지형에따른이동성의제약과보행로봇이갖는에너지효율의단점을최소화할수있는효과가있음 또한, 해당기술에의하면이동로봇의이동방법이주변지형에유연하게적응이가능하므로, 자연환경에서의로봇의활용의범위가커지는효과가있음 기술관련 세부문의 인하대학교 계약관련 179
188 기술개발테마현황분석 분류 세부내용 기술명 험지탐사용가변형볼로봇 기술이전목적및필요성 인명피해를최소화시킬수있는군사용로봇, 사막이나잔해로가득한건물들과방사능오염지역같이사람이움직이기힘든곳을정찰및탐사하는로봇, 험지탐험이나위험동물들을촬영하는방송용로봇, 지진이나산사태에깔린사람들에게산소나물을공급가능한인명구조용로봇및고령화시대에거동이불편한사람들에게편의를제공해주는완구용로봇등이러한필요성으로최근에는인간및여러형태의동물모양및습성을모티브로한로봇들이다양하게제작되고있음 기술활용방안및기대성과 가변형볼로봇은제1 유닛, 제2 유닛, 제1 프레임, 제1 연결부들, 제2 프레임, 제2 연결부들및복수의제1 다리들을포함함 상기제1 유닛및상기제2 유닛은상하로각각결합되어볼형태를형성하고, 상기제1 프레임은상부에위치하고, 상기제1 연결부들은상기제1 프레임외주면에돌출되고, 상기복수의제1다리들은결합부위의상하부가각각상기제1 프레임과상기제2 프레임에좌우로회전가능하도록결합됨 기술관련 세부문의 한국기술교육대학교 계약관련 180
![산업용부상방지및작업지원로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 산업용부상방지및작업지원로봇분야키워드클러스터링 ] [ 산업용부상방지및작업지원로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1.](/docs-images/93/112329278/images/189-1.jpg "Robot arm assembly and industrial robot using the same 클러스터 01 transmission mechanism 3~4 2. Industrial robot 3.")
189 산업용부상방지및작업지원로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 산업용부상방지및작업지원로봇분야키워드클러스터링 ] [ 산업용부상방지및작업지원로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1. Robot arm assembly and industrial robot using the same 클러스터 01 transmission mechanism 3~4 2. Industrial robot 3. Robot Collisions: A Survey on Detection, Isolation, and Identification 181
190 기술개발테마현황분석 No 주요키워드연관도수치관련특허 / 논문제목 1. Robot service system and a method for providing remote service for a robot 클러스터 02 robot controller 4~5 2. Autonomous Coverage Robot 3. AN INDUSTRIAL ROBOT SYSTEM COMPRISING AN ENABLING UNIT AND A PLURALITY OF GENERAL PURPOSE DEVICES AND A METHOD FOR CONTROLLING THE ROBOT SYSTEM 1. Onsite steel rail laser processing vehicle 2. Articulation Systems, Devices, and Methods for Catheters and 클러스터 03 laser processing 3~4 Other Uses 3. Robotic partial nephrectomy performed with Airseal versus a standard CO2 pressure pneumoperitoneum insufflator: a prospective comparative study 1. Battery replacement robot with mobile storage rack and battery replacement method 클러스터 04 battery replacement 6~7 2. Integration of new technology for research in the emergency department: Feasibility of deploying a robotic assessment tool for mild traumatic brain injury evaluation 3. Electrode material, electrode, and battery 1. MULTI-AXIAL INDUSTRIAL ROBOT 클러스터 05 supporting structure 2~3 2. Electric spot welding head for a multi-axis industrial robot with a casing and supporting structure ; Robot comprising this head 3. Manipulator robot 1. Industrial robot and method of transporting the same 클러스터 06 arm unit 5~7 2. Arm structure of industrial robot 3. ROBOT OPERATING APPARATUS PROVIDED WITH HANDLES FOR OPERATING ROBOT 클러스터 07 operating system 3~5 1. A simulator for Underwater Human-Robot Interaction scenarios 2. Dual-system component-based industrial robot controller 3. AUTONOMOUS ALL TERRAIN ROBOTICS VEHICLE 182
191 산업용부상방지및작업지원로봇 No 주요키워드연관도수치관련특허 / 논문제목 1. Automated truck unloader for unloading/unpacking product from 클러스터 08 detection space 3~5 trailers and containers 2. System and Method for Automated Truck Loading 3. Distributed sensors for hazard detection in an urban search and rescue operation 1. APPARATUS FOR THE AUTOMATED FEED OF CONNECTING 클러스터 09 supply line 2~4 ELEMENTS TO A PROCESSING UNIT AND FEED HOSE FOR THE CONNECTING ELEMENTS 2. Guide system for supply lines and a robot with a guide system 3. PARALLEL ROBOT 1. LUBRICATING OIL DETERIORATION SENSOR AND MACHINE 클러스터 10 deterioation sensor 3~6 PROVIDED WITH SAME 2. Speed reducer for industrial robot 3. Lubricant sensor 183
192 기술개발테마현황분석 (2) 요소기술도출 산업 시장분석, 기술 ( 특허 ) 분석, 전문가의견, 중소기업기술수요를바탕으로로드맵기획을 위한요소기술도출 [ 산업용부상방지및작업지원로봇분야요소기술도출 ] 분류요소기술키워드 구조설계기술 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 센서기술 기술 / 시장분석, 전문가추천 로봇구조및그래스퍼기술 작업지원을위한제어기술 로봇의태스크수행통합제어기술 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 원격제어와시간지연및예외처리를위한통합운용소프트웨어기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 그래스퍼기술 전문가추천, 특허 / 논문클러스터링 가변기구메커니즘 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 이동플랫폼기술 이동메커니즘 기술 / 시장분석, 전문가추천 전력공급기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 환경인지기술 2D, 3D 환경인지 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 184
193 산업용부상방지및작업지원로봇 (3) 핵심요소기술선정 확정된요소기술을대상으로중소기업에적합한핵심요소기술선정 [ 산업용부상방지및작업지원로봇분야핵심요소기술 ] 분류핵심요소기술개요 구조설계기술 중량물핸들링을위한자유도를가지는관절구조에대한설계기술 로봇구조및그래스퍼기술 센서기술 각종센서를활용한매핑 ( 지도작성 ) 및주변물체인식, 환경측정용센서기술 그래스퍼기술 다양한모양의물체를파워그래스핑할수있는그래스프설계기술및동작범위와효율을고려한복합구조의로봇설계및제작기술 이동플랫폼기술 가변기구메커니즘 전력공급기술 환경인식기반장애물분류를통한승월가부판단기술및바퀴, 캐터필러, 관절의구조변경및이동부구조변경에따른플랫폼위치변경기술 엔진출력의동력전환, 효율적인베터리충방전및엔진 / 베터리기반유압생성과융합구동력발생기술 환경인지기술 2D 환경인지 3D 환경인지 작업상황파악을위한영상을획득하고시점을동기화하여영상을디스플레이. 가시권외제어를위한데이터기반원격지영상구성및보강기술 작업상황파악을위한영상을획득하고시점을동기화하여영상을디스플레이. 가시권외제어를위한데이터기반원격지영상구성및보강기술 185

194 기술개발테마현황분석 나. 산업용부상방지및작업지원로봇기술로드맵 최종중소기업기술로드맵은기술 / 시장니즈, 연차별개발계획, 최종목표등을제시함으로써 중소기업의기술개발방향성을제시 186
195 산업용부상방지및작업지원로봇 다. 연구개발목표설정 핵심요소기술별최종목표는아래와같이기술요구사항과연차별개발목표로제시함 [ 산업용부상방지및작업지원로봇분야핵심요소기술연구목표 ] 분류핵심요소기술기술요구사항 로봇구조및그래스퍼기술 이동플랫폼기술 구조설계기술 센서기술 그래스퍼기술 가변기구메커니즘 전력공급기술 로봇구조자유도 기존대비매핑및주변환경인식률 (%) 기존대비그래스프성공률 (%) 제작완성률 (%) 기존대비전력공급기술력 (%) 연차별개발목표 1 차년도 2 차년도 3 차년도 6DOF 이상 6DOF 이상 6DOF 이상 % 이상 95% 이상 98% 이상 최종목표 중량물핸들링을위한자유도를가지는관절구조설계 각종센서를활용한매핑및주변물체인식, 환경측정가능 다양한모양의물체를파워그래스핑할수있는그래스프설계기술및동작범위와효율을고려한복합구조의로봇설계및제작 바퀴, 캐터필러, 관절의구조변경및이동부구조변경에따른플랫폼위치변경 엔진출력의동력전환, 효율적인배터리충 / 방전, 무선 / 수중전력전송기능 환경인지기술 2D 환경인지 3D 환경인지 환경인지기술 실시간분석및시점동기화 이동중실시간분석 장애물에대한인식및우선권확보 작업상황파악및시점동기화 187
196
197 물류로봇 기술개발테마현황분석
198
199 물류로봇 정의및범위 인간을대신하여생산자와소비자사이에서원료재료, 부품, 상품을안전하고효율적으로전달하기 위하여상품을자동으로관리하는로봇 물류로봇은적용분야에따라제조공정용, 창고관리용, 무인택배용물류로봇으로나눌수있음 정부지원정책 유망품목중심핵심요소기술확보및경쟁력강화지원 신규수요창출및해외시장진출기반확대 타산업 타분야의로봇수요발굴및수급기관간협업활성화를위한로봇융합얼라이언스추진 로봇사업화지원사업의전략적활용을통해신규수요창출 중소기업시장대응전략 강점 (Strength) ( 환경 ) 세계최고수준의 IT 인프라 ( 기술 ) 실제산업현장에서운용이가능한기술력보유 ( 정책 ) 물류산업에대한지원정책기회 (Opportunity) ( 환경 ) 타산업과의융복합에따른신시장창출 ( 기술 ) 수요처에최적화된기술개발 ( 정책 ) 다양한산업에서의물류로봇적용지원사업 약점 (Weakness) ( 환경 ) 대기업과물류업계의참여가필수적 ( 기술 ) 안전성확보필요 ( 정책 ) 높은진입장벽해소부족위협 (Threat) ( 환경 ) 선진국의선점효과 ( 기술 ) 아마존, 구글등글로벌기업과의기술격차 ( 정책 ) 드론을사용한배송에대한규제 중소기업의시장대응전략 비제조환경, 대형건물에서사용하는물류로봇에집중 제조 판매에서끝내는것이아닌중 장기간의서비스를포함한사업화모델필요
200 핵심요소기술로드맵

 이나로봇매니플레이터결합형로봇 택배용물류로봇은택배차량에상품을승하차하는로봇에서드론등의비행체를이용한로봇 물류로봇은인간을대신하여최적의이동경로를선택하여원료재료, 부품,")
201 물류로봇 1. 개요 가. 정의및필요성 물류로봇이란인간을대신하여생산자와소비자사이에서원료재료, 부품, 상품을안전하고효율적으로전달하기위하여상품을자동으로관리하는로봇으로, 상품의이송, 핸들링, 포장, 분류, 배송기능을하는자동화로봇 물류자동화를위하여다양한형태의물류로봇이있으며, 공정자동화로봇, 제품의재고관리및상품이송용 AGV 에서드론도물류자동화를위한로봇으로보고있음 물류산업은제조장비산업의인식이강하지만 IT 와로봇기술의결합으로자동화시스템을구성하는물류로봇에대한수요가커질것으로전망 물류산업을포함하고이해하면서괄목할만한성과를거둔아마존과알리바바의예가있음 국내에서도최근 CJ 대한통운이물류첨단화를통해재도약을준비하고있음 물류자동화에는제조공정용물류, 배송업무용창고관리, 택배용물류로봇으로나눌수있음 제조공정용물류로봇은제조공정시스템내에서제품생산과자동화를위한물류이송을담당하는로봇 배송업무용창고관리로봇은재고관리상품분류를위한 AGV(Automated Guided Vehicles) 이나로봇매니플레이터결합형로봇 택배용물류로봇은택배차량에상품을승하차하는로봇에서드론등의비행체를이용한로봇 물류로봇은인간을대신하여최적의이동경로를선택하여원료재료, 부품, 제품을다음공정으로이동시키거나최종소비자에게전달하기위한자동화로봇의형태로, 환경에맞게상품의파지이송및포장매니플레이터타입부터포장상품을이송혹은배송하는로봇형태까지다양한형태의물류로봇이있음 * 출처 ( 좌측부터 ) : 자동피킹로봇, 셔틀로봇등도입스마트물류센터구축한다, 'CES 2018', 화제의로봇들 (1)( 로봇신문, 2016, 2018) [ 물류로봇의예시 ] 193
202 기술개발테마현황분석 나. 범위 (1) 제품분류관점 물류로봇의적용분야가확장되어다양한분야에서다양한형태로적용되고있으며, 공장자동화를위해무인반송, 재고관리, 화물처리용 AGV 와비행체인드론로봇형태로 분류되고있음 물류로봇은적용분야에따라제조공정용, 창고관리용, 무인택배용물류로봇으로나눌수있음 제조공정용물류로봇은공장라인과협업을통한형태로, 다양한형태의로봇팔과컨베이어시스템, 무인 AGV등이있음 창고재고관리용물류로봇은상품의분류및배송을위한시스템과함께 AGV 타입의로봇들이있음 무인택배용물류로봇은실내용일반 AGV와드론형비행체물류로봇이있음 물류로봇의경우상품의정확한인식, 다량의상품의신속한분류및이동등을요구하므로 정교한센싱기술, 자율주행기술등이필요함 효과적인물류관리를위한물류로봇에적용되는기술로는자동인식기술, 화물추적관리시스템, 복합운송B/L, QR, RFID, Bar Code, XML, 등종합적인기술의이해가필요함 효과적인물류정보관리를위한 IT 기술로 RFID와 QR 코드기술이대표적임 RFID는인식되는거리, 인식속도, 인식의정확성, 식별자의재사용성, 조작의편의성등의이점이있으며, 기존의바코드시스템을대체하기위한기술로적합 QR 코드는오염과손상에강하고높은복원율을가짐 물류창고내의물류로봇의자율주행에필요한기술로는실시간위치파악, 경로의생성과추종기능등의기술이필요함 실시간자기위치파악기술로는 CCD 카메라, LRF, 초음파센서, RFID, 자기-자이로유도, 유선유도등의기술 AGV 물류로봇의이동방식은삼륜구동, 다륜구동, 차륜구동방식이있으며, 차륜구동방식은양바퀴의속도차이를이용하여조향이가능하며, 간단한메커니즘으로보편적으로적용 물류창고에서 AGV 물류로봇의리프트구조의경우 KIVA 시스템은나선형볼베이링기반리프트구조를적용하고있음 - 리프트모듈은고정되고로봇몸체만의회전운동을통하여팔레트높이를조정할수있음 194
203 물류로봇 기술개발테마 제품분류관점 센싱기술 [ 제품분류관점기술범위 ] 제품별용도 이송혹은정리대상의인식, 로봇의위치인식, 경로인식 로봇제조기술 로봇팔, 다관절로봇, 로봇손, AGV, 무인항공기등에적용됨 물류로봇 로봇제어기술 아키텍쳐기술 제어용 S/W, 알고리즘, 제어기설계, 무인항공제어등에활용됨 물류통합제어알고리즘. 화물추적관리, SCM, 복합운송 B/L, 데이터 관리, 실시간처리, 빅데이터처리 로봇머니플레이트기술 수직다관절로봇, SCARA 로봇, 파레타이징로봇등물류운송및 집하처리로봇등에활용됨 (2) 공급망관점 물류로봇은공급망단계에따라제조용이송로봇, 집하적재용반송로봇, 무인택배용드론로봇이있음 제조용이송로봇에는반도체이송용수평다관절로봇, 수직다관절형태의파레타이징로봇, 직교좌표로봇등공정장비로봇을포함 집하적재용로봇에는컨베이어시스템, AGV 등이있음 무인택배용드론로봇처럼비행체를이용한택배시스템로봇도포함됨 [ 공급망관점기술범위 ] 기술개발테마공급망관점세부기술 제조용이송로봇 AGV, 파렛타이징로봇, 종정용인라인로봇 물류로봇 창고용물류로봇 AGV, 컨베이어시스템 배달용물류로봇 AGV, 무인항공기 195
204 기술개발테마현황분석 2. 외부환경분석 가. 산업환경분석 (1) 산업의특징 물류산업의수요및규모의증가 글로벌기업들은신기술도입, 업종융합등으로배송전쟁을선도하고있음 미국의아마존, 중국의알리바바의사업모델을통해미래국가경쟁력의핵심이물류산업임을확인 아마존이개최한아마존피킹챌린지에서여러종류의제품들을정확히분류해떨어뜨리거나파손시키지않고지시받은장소에갖다놓을수있는로봇경진대회가각광을받으며연구기관들이참가하는분위기는마치수술용로봇챌린지나 DARPA 의재해로봇챌린지, 인공지능연구대회와같은분위기임 각국에서드론을이용한배송서비스를앞다투어준비함 향후국가경쟁력확보차원에서물류로봇에대한기술선점이필요 드론으로대표되는새로운물류시장을형성하고기존시장은강화시키는경쟁력있는물류로봇개발의필요성이대두됨 타산업과의융복합에따른신시장창출의기회가되고있음 IT기술, IoT 기술, 로봇기술의융합에대한필요성이발생되고있음 글로벌기업들을시작으로 IT를활용한이종업체간결합을통한새로운부가가치제공 드론기술, 인공지능등이결합하여새로운무인택배물류로봇까지등장함 모바일환경에서의온라인주문과그로인한일대일배송의필요성이증가 생산자와소비자사이의중간경계가사라지고상품을바로수령할수있는무인택배수요증가 기업의경쟁력확보차원에서물류시스템플랫폼과연계된비즈니스수요증가 물류로봇은경제성장률보다높은성장성과파생시장이기대되는산업으로그속에서로봇의역할에대한기대가아주높음 국내에는세계최고수준의 IT 인프라가구축되어있고로봇응용분야에대한기술을확보한중소기업이많아어느분야보다관심을가지고성과를가질수있는환경이조성되어있음 단, 산업구조가어쩔수없이대기업의참여가필요하며기존물류업계의참여가또한필요한부분으로정책적접근이필요함 무인자동화에대한안전성입장에서의기술개발과그에따르는정책정비가필요함 196
205 물류로봇 (2) 산업의구조 물류분야의전략적기술개발을통한물류산업발전기반조성과로봇강국위상에부합되는 물류로봇산업경쟁력제고로고부가가치창출을위한필수산업 물류로봇은 ICT 기술과로봇산업의융합으로고부가가치의생산구조실현및경제적가치 향상을주도할새로운산업 물류로봇은제조업의전공정에걸쳐서물류자동화를위하여필요하며전방산업으로는 무인택배물류로봇으로서드론, 창고관리, 물류로봇으로서 AGV, 제조공정과연관관계이며, 후방산업으로는센서, 구동, 제어, 데이터관리처리, 통신기술등과연관이있는구조 물류로봇은우수한 IT 기술력을보유하고, 공정로봇분야에서세계에서인정하는기술을 가진국내산업에분명유리한점이있음 더불어현재산업의구조및방향이일대일구조의운송시스템과보다고도화된물류산업 기술이요구받는것이또한기회로판단됨 특히물류산업의성장에따라물류로봇산업도활성화되고, 로봇을구성하는각요소기술 및모듈산업의연쇄효과가기대됨 그러나선진국의선점효과가존재하고있어서빠르게추월할수있는동력이필요함 [ 물류로봇산업구조 ] 후방산업가전로봇전방산업 센서, 신호처리산업, 모터및액츄에이터산업, 통신제어모듈산업, 시스템설계및제어산업, 제품디자인산업, 로봇매니플레이터산업, 유무선이동통신, 데이터관리및처리 제조공정로봇, 창고관리로봇, 무인택배로봇 제조공정산업, 물류창고산업, 무인택배산업 197
 구분 16 17 18 19 20 21 CAGR 세계시장 386 427 471 546 633 735 16.")
206 기술개발테마현황분석 나. 시장환경분석 (1) 세계시장 물류로봇분야의세계시장규모는 2016 년 3 억 8,600 만달러규모에서 2021 년까지 16.8% 성장하여 7 억 3,500 만달러의시장을형성할것으로전망됨 세계시장에서물류로봇의위상은아마존과같은대형물류시스템이로봇을채택하게 되면서현재어느때보다높음 [ 물류로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 세계시장 * 출처 : World Robotics 2014, 지능형로봇 2015, 국내외로봇산업동향 2015 등을참고하여추정 * 출처 : Macquarie, IITP, 2017 [ 로봇분야별출하대수분석및예상 ] 198

207 물류로봇 세계적으로로봇분야별출하대수분석에서보면물류로봇의비중이보다증가할것으로 예상되고있음 특히맥쿼리는접객, 물류, 음식배달등의분야가로봇판매대수가급증할것으로예상하고 있음 특히단거리배송로봇시장규모가급증할것으로예상됨 배송로봇이란단거리 (5km에서 10km이내 ) 에서음식이나소형택배를배송하는로봇으로현재드론이상용화를앞두고있음 단거리배송로봇시장은 2025년 13억달러규모로맥쿼리는예상하고있음 24시간무인배송이가능하므로물류센터로부터개인으로배송하는시스템에대한요구사항이급증할것으로예상됨 [ 테슬라공장에서가동중인어뎁트링스 ] 최근물류로봇의발전방향은공장에설치하는가이드나마커가공장의유지보수비용을 상승시키는데반해새로운모델들은자체센서만으로 AGV 를구현하고있다는점 199
208 기술개발테마현황분석 (2) 국내시장 물류로봇의국내시장규모는 2016 년 99 억원규모에서 2021 년 181 억원규모로증가할 전망 [ 물류로봇분야의국내시장규모및전망 ] ( 단위 : 억원, %) 구분 CAGR 국내시장 * 출처 : World Robotics 2014, 지능형로봇 2015, 국내외로봇산업동향 2015 등을참고하여추정 국내물류로봇은아직아마존이나테슬라, 알리바바등이채택한것과같은선도적기술을 개발적용한예는없음 국내시장의규모가작고열악하며무엇보다중소기업에게진입장벽이높음 그런국내에서도최근 CJ 대한통운과한진택배등의물류회사를중심으로로봇의도입이나 로봇기술의적용에많은관심을가지기시작 200
209 물류로봇 다. 기술환경분석 물류로봇은시장규모와물류시스템전체에서역할을비춰볼때중소기업에적합함 기업의비용절감과작업효율향상을위한물류로봇의수요가증가됨 또한드론등의새로운아이디어가시장을창출하는좋은선순환을보여주고있음 물류자동화시스템이기업의경쟁력을좌우하는핵심요인이되고있으며소비자의다양화된 요구와상품주기단축에대응하는효율적인물류자동화시스템구축의필요성이증대됨 물류로봇의경우상품의인식, 이동, 머니플레이터기술등이필요 로봇자동화를통한물류경쟁력확보 아마존의키바는창고물류비용을많은비율로절감하면서물류로봇의가치를증명함 국내에서는물류 지원이필요 로봇에대한투자가저조하여국가경쟁력확보와기술선점차원에서정책적 물류자동화로봇의성능향상 최근물류자동화로봇기술은다양한인공지능기능을탑재하거나시도하고있음 특히소규모소비자형매장에도진출하려는시도가이어지고있음 이를위해다양한안전기술및견고함, 환경에대한적응력등이요구되고있음 드론을활용한물류택배 아마존, 구글등회사에서상용화를앞두고있음 드론을활용한물류시스템구축을위한정책정비가필요함 201
210 기술개발테마현황분석 3. 기업분석 가. 주요기업비교 세계로봇시장은 2015년 269억달러로추정되며, 향후 10년간연평균 9.5% 정도의성장률을보여 2025년에는 669억달러에달할것으로전망 (ICT Brief 호 ) 전체로봇중산업용로봇이약 65% 의비중을가지고있으며이비중은점차감소하여 2025년에는절반이하로떨어질것으로예상 산업용을제외한서비스용로봇분야에서는의료로봇과필드로봇및국방로봇이큰비중을차지하며이러한특수목적로봇분야에이어물류로봇이큰시장을형성하고있으며, 향후성장가능성이매우높게평가되고있음 현재주로사용되고있는물류로봇은공장이나창고등에서활용되고있으며, 정형적환경에서정형적방법으로운용되는 AGV(Automated Guided Vehicle) 가주를이루고있음 AGV는그특성상사람과활용공간이겹치지않고정해진형태의작업만수행하므로용도가매우제한적이며, 시스템을환경에설치해야하므로초기투자비용이많이발생하고시스템이나환경에변화가있을경우재투자비용이발생할수있음 2012년 Amazon에인수된 KIVA Systems에서개발, 운용하고있는물류로봇시스템이대표적인예로서 2014년현재 Amazon의물류창고에서약 1,000대정도가사용되고있음 - KIVA Systems의물류로봇은재고관리와상품운반등을담당하고있으며, 로봇스스로최적의경로를생성하고작업을수행함으로써효율성과물류작업의비용을크게감소시킴 - 로봇한대당최대 6명이할수있는일을수행할수있으며 5년간활용하였을경우 75만달러의인건비를줄일수있음 - 최대 454kg의물품을적재할수있으며, 바닥의바코드를읽어위치를인식하여 1.3m/s의속도로물품이송이가능함 제조업의귀환을통해국내생산력을높이고자주력하고있는미국이물류로봇분야를선도해가고있는데, 특히미국내 5~6개업체가물류시장의 80% 이상을차지하고있으며초기투자비용을최소화하고다양한환경에적용하는데필수적인자율주행기술을확보하기위해적극적으로노력하고있음 - JBT Corporation은자율주행기능을높인 SGV(Self Guided Vehicle) 을개발하였음 - 미국외에서는벨기에의 Egemin Automation이유ㆍ무인으로활용할수있는 AGV를개발하고수동및자동운전의전환을통해시스템의활용성을최대화하고자노력하고있음 - 일본의경우 MEIDEN 사에서개발한 MCAT이 1m/s의이송속도와 500kg의적재능력을가지고있는데특히이송용로봇플랫폼과조립가능한제어및센서모듈이별도로있는구조를가지며, 자기테이프를이용한위치인식솔루션으로 3cm 이내의정지위치오차를달성하였음 202
211 물류로봇 플랫폼의기술의범용화추세에따라우수한주행 S/W 능력이이슈가되어가고있으며, 다양한기능을공유하기위한 Open S/W와자사에특화된 S/W들이개발, 발표되고있음 로봇개발자들의알고리즘을공유하기위한조직인 OSRF(Open Source Robotics Foundation) 은 ROS(Robot Operation System) 의버전을관리하고있으며, 로봇의주행관련기술의빠른업데이트를통해이동플랫폼의자율주행기술을선도하고있음 청소로봇 Roomba와군용로봇 Packbot으로유명한 irobot 사는 AWARE 2.0이라는로봇지능제어 S/W를개발하여이동로봇의행동제어및통신관리등에활용하고있으며이를기반으로농업, 의료등다양한분야로진출하고있음 연구용플랫폼의대명사인 Pioneer 로봇의개발사인 Adept Robotics는다양한형태의자사로봇플랫폼을물류작업에적용할수있도록로봇주행 S/W ARIA를플랫폼제품에포함하여제공 고령화와생산인구의감소로인해어려움을겪고있는많은나라에서물류기능을기반으로하는서비스로봇에대한수요가점차커지고있음 싱가폴의경우음식점등의점포에서드론이나이동로봇을이용하여음료, 식사등을가져다주는서비스에큰관심을가지고유력한플랫폼및시스템을탐색하는중 코카콜라에서는자사의전시관등에서음료배달을수행하는로봇에대한데모를시행하고이의구매를적극적으로진행하고있음 EU의몇몇나라에서는노령인구를돌보는요양원, 병원등지에서부족한인력을보충하고자식사, 세탁물, 약품등의배송을수행하는로봇시스템에대해적극적인성능시험을추진하고있음 국내의경우정부주도차원에서물류자동화시스템을구축하는연구를일부수행하고있으며, 물류자동화및물류로봇기술은선진국대비 2년정도뒤진것으로평가됨 산업통상자원부에서는 AGV의주행기술개발이나병원물류로봇의개발등에대한과제를진행하며국내의물류관련자율주행기술을확보하고자노력하고있음 자율주행관련원천기술의개발은상당히진행되었으나기술의제품화가미진한상황이며, 물류작업을위한이송용툴관련기술은선진국대비 80% 수준정도로, 이적재용로봇의지능형제어기기술은 75% 수준으로평가됨 유진로봇은한국전자통신연구원, 을지대병원과협업하여병원, 요양원등에사용될수있는고하중, 저하중의물류로봇을개발하고있으며, 동시에국내외판매처로의판매를적극적으로추진하여좋은평가를받고있음 203
212 기술개발테마현황분석 [ 제품분류별주요기업 ] 구분 경쟁환경 기술분류센싱및플랫폼개발기술작업환경인지기술물류배송등임무수행기술 주요품목및기술 센서제작, 센싱정보전처리 / 후처리, 고하중 / 저하중이동플랫폼제작, 이송용카트제작, 핸들링장치제작 센서정보융합, 광역지도작성, 지도편집 / 관리, 위치인식, 전역 / 지역경로계획, 충돌회피, 경로추종 대상물품인식, 핸들링장치제어, 외부부착물인식및활용 해외기업 Velodyne, SICK, Bosch, Hokuyo, Aethon, Swisslog, JBT Corporation, Adept Technology, KIVA Systems, Panasonic SRI, Evolution Robotics, irobot Swisslog, Aethon, KIVA Systems, Panasonic, Amazon 국내기업 이오시스템, 유진로봇, 레드원테크놀로지, 퓨처로봇 하기소닉, 삼성전자, LG 전자, 유진로봇, DRB 파텍 NT 리서치, 유진로봇 국내중소기업사례 와이에스티티는기계 설비 자동차및공업용로제조업체이며, 최근무인이송등스마트공장솔루션개발을통해자율주행로봇과협업로봇을활용한로봇자동화시스템기업으로변모중. 와이에스티티는인천공항 CIP라운지내부를돌아다니며이용객에게물품을제공해주는자율주행로봇을도입, 시범운용중 디엠테크놀러지는산업용로봇 / 자동화기기제조등산업용로봇제조업체이며, 고속정밀이송용갠트리로봇개발과상용화성공. 고속정밀이송용갠트리로봇은전자, 반도체산업의클린룸환경에적용할수있는리니어모터기반의신제품. 두산 현대위아등제조공장생산설비에독자적으로생산로봇제품을납품하고있으며현재는중국시장진출을위한판로를개척중 엔티로봇은주요제품으로무인물류운반로봇, 착용형보행로봇, 고속외관검사로봇등생산. 병원에서열액등의의료검체, 수술도구, 의료품, 의약품, 폐기술등의다양한물류를운반해주는물류운반로봇 ( 모델명 : Sbot2-MD) 개발. 별도의가이드라인없이자율주행하며장애물회피가능 유진로봇은청소로봇아이클레보시리즈를비롯해배달서비스로봇고카트, 모바일플랫폼터틀봇등을생산. 유진로봇의독자적인기술력인자율주행솔루션을탑재한고카트는스스로엘리베이터를호출해층간이동및자동문통과가가능하며, 복잡한동선을가진병원이나호텔, 폭이좁은양로시설등에서활용 204
213 물류로봇 원에이지브이는 80~90% 를수입 ( 일본, 스웨덴등 ) 에의존하는 AGV 시장에서핵심부품및기술을자체개발, 수입품대비절반가격을형성해경쟁력확보. ( 주 ) 원에이지브이의자기유도형무인운반차에는전용제어기, 유지 보수 SW, 주소태크로 100여개이상코스입력가능한주소레이저, 상하이동형 RDD가탑재되었으며, 무인운반차제작에관한독보적인핵심기술을확보하고산업현장맞춤형부품을직접개발해적재능력이뛰어난무인운반차를생산 코어벨은산업용로봇 / 서비스로봇 / 통신기기 / 방송장비제조업체, 팔레트에박스별로구분적재가능한로봇시스템및물류이송에사용되는무인운반차 ( 최대 250kg /500kg) 를개발하여보급중. 코어벨의 2018년예상매출액은약 80억원정도이며, 최근한컴 MDS는코어벨을인수하여지능형로봇사업체계확립계획 [ 주요중소기업비교 ] ( 단위 : 백만원,%) 국내업체자산총계매출액 매출액증가율 영업이익율당기순이익율 R&D 집중도 와이에스티티 10,782 3, 디엠테크놀러지 16,857 15, 엔티로봇 2, 유진로봇 37,919 36, 원에이지브이 748 1, ) 코어벨 4, ) 2014 년 R&D 집중도 205
 해외업체동향 물류로봇의선진국인미국은공장, 물류창고에적용가능한물류로봇부터공중배송을목표로하는드론에이르기까지다양한분야에서물류로봇의기술을발전시키고있음")

![400kg이넘는가반하중을처리할수있으므로작업효율성을제고하였으며표준화된공간에서표준화된플랫폼을사용함으로서유지보수가원활하도록개발되었음 [ KIVA Systems 의 AGV ]](/docs-images/93/112329278/images/214-3.jpg "Google은무인자율주행차량을개발ㆍ시험하고있으며현재까지최대의시험주행거리를기록하고있으며, 이를통해인간탑승, 물류수송등다양한분야로의확장을계획하고있음 Aethon은병원,")
214 기술개발테마현황분석 나. 주요기업기술개발동향 (1) 해외업체동향 물류로봇의선진국인미국은공장, 물류창고에적용가능한물류로봇부터공중배송을목표로하는드론에이르기까지다양한분야에서물류로봇의기술을발전시키고있음 KIVA Systems는물류창고관리와 AGV의기능을결합한물류로봇제품을개발하여 Amazon의물류창고에적용하고있으며, 이는전자상거래업체들의신속하고다양한수요에대응하기위한목적을가지고있음 특히이물류로봇은비교적작은크기에 400kg이넘는가반하중을처리할수있으므로작업효율성을제고하였으며표준화된공간에서표준화된플랫폼을사용함으로서유지보수가원활하도록개발되었음 [ KIVA Systems 의 AGV ] Google은무인자율주행차량을개발ㆍ시험하고있으며현재까지최대의시험주행거리를기록하고있으며, 이를통해인간탑승, 물류수송등다양한분야로의확장을계획하고있음 Aethon은병원, 요양원등의환경에서약품, 검체등의저하중물품에서부터식사, 린넨등의고하중물품까지를운반할수있는플랫폼인 TUG를개발하여세계 150여개사이트에서 500여대이상을운영하고있는데이플랫폼은자동문과의연동및엘리베이터를이용한층간이동이가능하여다양한서비스를제공하고있음 [ Aethon 의 TUG ] 206

![Amazon 의드론배송플랫폼 ] 유럽은 AGV 제품의매출자체는미국에비해높으나세계시장을선도하는회사는적은것으로파악됨 유럽시장은미국시장대비 4~5배의 AGV 매출규모를가지고있으며, 스위스, 핀란드,](/docs-images/93/112329278/images/215-2.jpg "독일등의회사가관련제품을판매하고있음 유럽의경우제조공장등에서사용될수있는제품보다고령인구를대상으로활용될수있는제품에주목하고있으며스위스의 Swisslog 에서는 TransCar 나 RoboCourier")
![와같은범용성높은로봇을개발하였음 [ Swisslog 의물류로봇플랫폼 ] 일본은오랜경기불황의여파로새로운제품을개발하는여력이많이감소한상태로물류로봇의시장규모가답보상태임 2008년미국발금융위기사태이후경기회복이매우더뎌](/docs-images/93/112329278/images/215-3.jpg "2009년 AGV 출하량이전년대비 60% 로급감한이후증가세가회복되지못함 다이후쿠나도요타자동직기등몇몇업체가일본내 AGV 생산의다수를차지하고있으며, 파나소닉에서는 Hospi 시리즈를통해물류로봇의확대를꾀하고있음")
215 물류로봇 Amazon 은드론이 30 분이내에도착할수있는 2.2kg 이하의물품에대해서공중택배서비스를 제공하기위해시험하고있으며, 2016 년 12 월 7 일영국에서최초의실제배송을수행하였음 - 배송에걸린시간은주문후 13 분이었으며배송완료가실시간으로관리자에게전달되었음 [ Amazon 의드론배송플랫폼 ] 유럽은 AGV 제품의매출자체는미국에비해높으나세계시장을선도하는회사는적은것으로파악됨 유럽시장은미국시장대비 4~5배의 AGV 매출규모를가지고있으며, 스위스, 핀란드, 독일등의회사가관련제품을판매하고있음 유럽의경우제조공장등에서사용될수있는제품보다고령인구를대상으로활용될수있는제품에주목하고있으며스위스의 Swisslog 에서는 TransCar 나 RoboCourier 와같은범용성높은로봇을개발하였음 [ Swisslog 의물류로봇플랫폼 ] 일본은오랜경기불황의여파로새로운제품을개발하는여력이많이감소한상태로물류로봇의시장규모가답보상태임 2008년미국발금융위기사태이후경기회복이매우더뎌 2009년 AGV 출하량이전년대비 60% 로급감한이후증가세가회복되지못함 다이후쿠나도요타자동직기등몇몇업체가일본내 AGV 생산의다수를차지하고있으며, 파나소닉에서는 Hospi 시리즈를통해물류로봇의확대를꾀하고있음 중국은인건비절감, 첨단기술확보등의목적을바탕으로물류로봇을포함한각종로봇 개발에매진하고있으며, 싱가폴은저임금종사인구의감소를해결하기위해식당, 점포 등에서활용할수있는물품배달서비스로봇도입을고려하는중 207
216 기술개발테마현황분석 (2) 국내업체동향 국내에서는십여개의 AGV 제조업체가관련제품을판매하고있으며, 특히반도체나자동차관련대기업에납품하는제품위주로시장이형성되어있음 국내기업의경우그규모가작고대기업의존도가높아전문적으로 AGV만을생산하는업체가많지않음 새로운기술과제품을개발하기보다외국산제품을들여와대상환경에맞춰적용하는경우도많으며, 이는국내기업의물류로봇저변확대에어려움을주고있는상황임 가정용청소로봇으로잘알려진유진로봇은병원이나요양원에사용될수있는물류로봇 기술을한국전자통신연구원, 을지대병원과공동으로개발하고있으며, 국내외사이트에서 시범서비스를수행하고있음 국내에서도인터넷쇼핑몰의매출규모가증대됨에따라주문된물품을배송하기위한택배 시장이커지고있어이를위한지능형물류센터나택배시스템을연구하고있으나물류로봇 자체에대한연구는소극적인상태 정부는로봇기술개발을적극적으로지원하기위해제1차로봇진흥계획을수행하였고현재제2차로봇진흥계획을진행하고있으며, 이러한지원에힘입어개발될로봇기술과우리나라가강한정보통신기술을잘접목한다면빠른시일내에좋은결과를도출해낼수있을것으로판단됨 특히빠른고령화추세와열악한노동환경등의사회적문제해결에도움을줄수있는 로봇기술은국가적, 국민적관심아래지속적으로발전하고있으므로물류로봇분야에서도 우수한서비스를제공할수있는기술이조속한시일내에이루어질것임 208
 물류자동화")

217 물류로봇 국내 ( 관련 ) 로봇산업의개발현황 구분 개요 기존제조용로봇이적용되기어려운정밀조립, 핸들링, 포장작업등다양한공정에 활용가능한첨단제조로봇 양팔로봇 ( 기계연구원 ) 설치공간을최소화하고양팔동시작업으로작업효율성이높아수작업의존도가 높은공정에적용가능 위치인식, 경로계획, 자율이동, 안전이동등의기술을바탕으로 가능 ( 소형 / 중형 2 종 ) 물류자동화 효율화 병원용물류환경에우선적용후호텔, 공장등다양한물류환경에확대적용가능 무인이송로봇 ( 유진로봇 ) 기계연구원연구실에설치된휴대폰포장공정라인에서양팔로봇 2대가동시에소형개별박스에휴대폰, 배터리, 이어폰등구성물을포장하고, 컨베이어벨트로이동된개별박스 10개를다른양팔로봇 1대가대형마스터박스에포장하는작업을진행함 무인이송로봇은포장된마스터박스를싣고목표지점으로자율적으로이동하는시연을선보임 209
218 기술개발테마현황분석 4. 기술개발현황 가. 기술개발이슈 자율주행기술의확대적용 물류로봇은공장이나단순창고등의정해진환경에서마그네틱라인등의미리지정된 표식을따라이동하는형태에서점차다양한작업수행이가능한자율주행기능을포함하고 활용하는방향으로기술발전이진행 물류로봇의적용분야가이전의제조산업에서서비스산업으로확장됨에따라로봇이활용될공간과목적이매우다양해지고있는추세 사전에정해진작업만을수행하는경우보다상황에따라적절한동작을해야하는필요성이커져로봇의자율주행기능이매우주목받고있는상황 자율주행은플랫폼과센서를포함한 H/W 자체, 센싱된데이터를융합ㆍ처리하는정보처리및환경인지, 그리고주어진목표를달성하기위해필요한로봇제어등다양한기능이조화되어야이루어질수있는고수준의기술임 자율주행은이동성을갖춘서비스용로봇의범용기술이며, 물류로봇이우수한물류서비스를제공하기위해꼭필요한기술 원하는물품을원하는시간에원하는곳까지안전하게이송하는것이물류로봇의주된활용목적임 한자리에서고정되어단순반복작업을수행하는제조용공정로봇과는달리물류로봇은로봇이적용된환경내에서가능한한자유롭게이동가능해야하며, 이러한환경에는사람이나동적 / 정적장애물의존재가능성이상존하고있음 보다효율적인물류작업수행을위해서물류로봇은환경에대한정보를파악하고이를기반으로자신의행동방식을결정하고이에따라이동동작을적절히수행해야하는데이는현재의기술로완전히충족하기어려운점이있음 그럼에도불구하고다양한환경에서다양한물품의이송서비스를적절히수행하기위해서는물류로봇이반드시일정수준이상의자율주행기능을갖춰야하며필요할경우서비스에특화된형태의제한ㆍ변형된주행형태를가실수도있음 실내바닥환경에서의 2차원자율주행을확대하여 3차원자율비행기술이요구되는분야도확장될것으로예상됨 현재물류서비스산업을선도하고있는미국의경우다수의회사가드론등을이용한신속배송기술을개발, 시험하고있음 보안문제나분실, 훼손등의가능성이존재하긴하지만드론배송은소비자에게새로운구매의욕을불러일으킬수있는수단이될것임 210
219 물류로봇 기존의자율주행기술에포함되는세부핵심기술을 3차원공간으로확장하고적용에필요한부분을추가하면보다우수한물류서비스를제공할수있을것이며, 이는단순한기술개발및활용의문제이기보다는산업의적용분야를확장하고새로운서비스를만들어가는과정으로볼수있음 국외의경우드론배송을원활히수행하기위해중간기착지에소형물류창고를운영하거나배송지를통합적으로운영하려는시도등다양한아이디어가도출되고있지만국내의경우아직까지단순한아이디어도출의수준에서크게벗어나지못하고있는상태임 이러한추세가이어진다면 3차원환경을이용한물류산업에있어서선진국을뛰어넘는것은요원해질것이므로관련기술개발및사업적용을서둘러야할것으로판단됨 관련산업및기술과의연계발전필요 공장이나물류창고를벗어나지못하던예전물류작업에비해미래의물류작업은연관된다양한기술과연계되어발전될것으로전망 미국의 Google은무인자동차를개발하고있으며, EU의 Volvo는무인자율트럭을시험하고있음 이러한무인차량기술은물류의원거리수송에매우적합한기술로, 인간이가질수있는졸음, 판단미숙, 오감지등의취약요소를대부분배제한상황에서원활한물류수송이가능하도록할것임 또한예전에는단순한레저용이나촬영용으로사용되었던드론을택배에사용함으로써일정지역내에서의물류를신속하고정확하게이송할수있는시대가다가오고있음 영상을이용한다양한물체의인식, 머니퓰레이터를이용한다양한형태의물체핸들링등기존의로봇관련핵심기술들이물류로봇의작업을위해스핀오프되고있으며, 이를이용한고품질물류서비스구현이점차가능해지고있음 Amazon의 Picking Challenge 등은이러한적용을점차가속화하는좋은예이며, 다양한분야의융합을통해개별물류로봇의기능은더욱발전할것으로예상됨 인터넷기술의발전으로인해전세계에걸쳐영업을하는인터넷쇼핑몰의규모가계속적으로커지고있음 미국의 Amazon, 중국의 Alibaba.com 등대형인터넷쇼핑몰에서는시간적, 공간적제약없이제품구매와배송이이루어지고있음 이러한인터넷쇼핑몰의약진은대량의재고확보및관리와다품종제품을소비자에게효과적으로배송할수있는물류시스템에기반을두고있음 그러나취급하는물품의종류와양이많아짐에따라물류관리비용이증가하게되므로물류창고의설비비용을최소화하고관리효율성을높이기위해기존의물류시스템을뛰어넘는고수준의물류시스템이요구되고있음 물류작업을수행하고있는인력의노동강도가계속적으로증가함에따라발생하는작업실수, 사고를효과적으로해결하기위해서도물류산업에첨단로봇기술의연계는필수적인추세 211
220 기술개발테마현황분석 고령화추세에따라증가하고있는실버산업에의적용및생산 인구감소로인한노동 인력의대체로서물류로봇의가치증가 전세계적인고령화추세와우리나라의급속한고령인구증가로인해실버관련산업이점차 확대될 것으로 전망되며 요양원과 같은 단체 시설의 운영을 위해 실버산업과 물류로봇의 연계 활용이더욱필요하게될것으로보임 또한인구절벽으로인한생산인구감소로인해단순반복적인물류작업을수행할수있는 인구가점차줄어들고있는데이를물류로봇이대체할경우산업경쟁력유지에큰도움이될 것으로전망 ICT 기술과의융복합화 사물인터넷과빅데이터를이용한정보통신기술과의융복합화가물류산업발전에필수적인항목이되어가고있음 능동적정보수집, 처리및전송이가능한사물인터넷의적용이점차확대되어가고있는추세이며근미래에는우리주변의거의모든사물에이러한기능이추가될것으로예상됨 물류산업에서중요한재고물품관리, 배송대상인식, 정확한배송처리확인등의작업은사물인터넷의기능을활용할경우매우손쉬워지고정확해질것으로보이며, 이는물류로봇의효율적활용에큰도움이될것임 또한빅데이터를제조, 운반, 판매등산업전반의과정에효과적으로이용할경우정확한수요의예측과최적의공급이이루어질수있으므로물류산업의효율성을크게향상시키게될것임 물류로봇은이러한정보통신기술을적용하여사용자가원하는고품질의물류서비스를수행하고이를통해물류산업의발전에중요한역할을할수있을것으로예상 정보통신기술의발달및적용으로이동플랫폼이외부환경으로부터다양한환경정보를손쉽게받아활용할수있게되는시대가다가오고있음 물류로봇의자율주행기능을수행하기위해서는로봇이작업하는환경에대한정보의획득및처리가필수적인데주변환경에서자체적으로이러한정보를전달해줄수있다면물류로봇자체의기능을간소화할수있고이에따라물류로봇의생산원가를절감하여보다쉽게물류로봇을사용할수있도록하는것이가능 근미래에구현될지능형교통시스템에적용될 V2V(Vehicle to Vehicle), V2I(Vehicle to Infra), V2P(Vehicle to Person) 기술과유사하게물류로봇간정보교환, 물류로봇과환경간정보교환등이가능해진다면물류로봇이더좋은서비스를더저렴한비용으로수행할수있게되므로물류로봇산업의확장에크게기여할것으로전망됨 또한물류로봇이환경내에설치된장치에자신의정보를전달하는기능을수행할수있으므로로봇에대한일상적모니터링도쉽게가능해지므로해당물류로봇시스템이얼마나물류작업을효율적으로수행하고있는지, 물류로봇의상태및예상작업수행도가어떤지등을간단히파악하고그에따른적절한조치가가능해지므로물류로봇시스템의효율성이대폭증가할것으로기대됨 212
221 물류로봇 물류센터 / 공장물류로봇 ( 다중물류로봇운영 ) 자율주행, 피커추종, 다중로봇운영최적화, WMS 연동등의기능을가지는물류로봇은전문물류기업과의협력을통해현재보유또는개발중인기술관점에서사업화가가능 - CJ대한통운에서최대 300대의다중물류로봇운영을위한기술개발중 - 세계 1위물류기업 DHL은물류로봇과관련해피커추종로봇, 고정형피킹로봇, 이동형피킹로봇, 트레일러 / 컨테이너하역로봇의순으로물류로봇이도입될것으로전망 국내는전문물류기업주도하에기존인프라에변화를주지않거나최소화하면서, 24시간작업이가능한물류로봇의단계적도입추진이예상 - 한화 ( 기계부문 ), 칼텍, 한성웰텍, 엔스퀘어등다수기업이물류센터 / 창고를위한자동화솔루션사업화 - 코어벨은박스별로해당하는팔레트에구분적재하는구분적재로봇시스템및물류이송에사용되는무인운반차 ( 최대 250/500kg ) 를개발해로봇보급사업수행 - 마로로봇테크는 QR 코드인식형물류로봇 MR.Logi, 포테닛은자율주행기술기반의제품판매 [ 물류로봇관련중점기술개발 ] 기술분류현재수준목표수준 인식 ( 학습 ) 박스단위물품종류, 위치 / 자세인식 미리정해진제한된수의개별물품종류, 위치 / 자세인식 미리정해진제한된물품에적합한파지장치선택 물류센터에존재하는 물품에 대한 종류, 위치 / 자세인식 물류센터에존재하는물품을파지할수있는 파지장치 조작 ( 파지장치포함 ) 물체별파지점사전정의 박스단위물품의피킹 물류센터에존재하는물품에대한파지점자동생성및학습에의한파지점최적화 물류센터에존재하는물품에대한개별물품단위피킹 / 포장 ( 파지제어를위한비주얼서보잉포함 ) 자동화되어있지않음 박스단위물품의상 / 하역, 상 / 하차자동화 * 출처 : 한국산업기술평가관리원 병원 요양원 호텔물류이송로봇 병원 요양원을중심으로소형 ( 의약품 / 검체 ), 중대형 ( 식사 ) 물품이송형태로사업화진행, 자동문, 엘리베이터연동기능이필요하며, 여러사람들이함께하는공간에서운영되어중저속으로이동하는것이특징 - 유진로봇은병원, 노인간병시설, 푸트코트등에서활용할수있는운반로봇 GoCartʼ개발: GoCart 1.0(60kg이하 ), GoCart 2.0( 최대 300kg ), 엘리베이터를이용한층간이동이가능 - NT로봇은의료검체무인운반로봇 (Sbot, 최대 80kg, 1m/s 속도 ) 을개발해국내외보급사업수행 - 사비오크 (Savioke)' 는리얼센스카메라기술과오픈소스운영체제인 ROS를활용해저비용의고성능센싱기능을갖춘로봇을개발하였으며, 호텔에서사비오크가 Relay 로봇으로초기시장을개척하고있는중 213
222 기술개발테마현황분석 나. 특허동향분석 물류로봇특허상주요기술 주요기술 물류로봇은주행기술, 위치인식및자율주행기술, 플랫폼설계기술, 협업 / 협동기술, 선적 기술및포장 / 분류기술로구분됨 주요기술주행기술위치인식및자율주행기술장애물파악및회피기술플랫폼설계기술협업 / 협동기술선적기술 설명 큰부하중량을이송하는로봇의이동기술 운용영역에서의자기혹은목표지점위치인식및효율적주행경로파악과작성능력 주행중예기치못한물체에대해이동성파악및회피기술 산업용물류로봇의필요성과특성을이해한기계 / 하드웨어설계기술 사람과의협업혹은다수로봇간동시작업기술 물류를안전하고효율적으로전달하기위해필요한로봇의선적기술 포장 / 분류기술 물류를안전하고효율적으로전달하기위해필요한로봇의포장 / 분류기술 세부분야별특허동향 주요기술별국가별특허동향 물류로봇의주요기술별주요국가별특허정보데이터를입수하였으며, 최근 10 년간의 특허데이터를비교분석함 주요기술 한국 미국 일본 유럽 계 주행기술 83 3, ,281 5,340 위치인식및자율주행기술 장애물파악및회피기술 플랫폼설계기술 51 3, ,408 협업 / 협동기술 19 1, ,259 선적기술 169 4, ,011 5,707 포장 / 분류기술 137 2, ,961 합계 , ,146 19,
223 물류로봇 국가별주요기술별특허동향에서전체기술에있어서는미국이가장많은비중을차지하고있으며, 주행기술및협업 / 협동기술에서는한국이위치인식및자율주행기술, 장애물파악및회피기술, 플랫폼설계기술, 선적기술및포장 / 분류기술에있어서는일본이상대적으로가장적은출원량을보유하고있음 기술별로는선적기술이가장많은출원량을보유하고있으며, 상대적으로장애물파악및회피기술이가장적은출원량을보유하고있음 선적기술과주행기술은물류로봇에있어서활발하게연구가이루어지고있음을알수있음 주요기술별출원인동향 주요기술기술집중도주요출원인국내특허동향 주행기술 Robert Bosch Toyota IBM 개인출원인중심 이우성, 한민섭 등 위치인식및자율주행기술 irobot IBM 개인출원인중심 조동혁 등 장애물파악및회피기술 Boeing irobot 개인출원인중심 이우성, 조동혁 등 플랫폼설계기술 IBM Microsoft VMware 대기업중심 Microsoft, 삼성전자등 협업 / 협동기술 Microsoft IBM 개인출원인중심 이우성 등 선적기술 IBM Microsoft 개인출원인중심 한상관, 이우성 등 포장 / 분류기술 IBM Microsoft 개인출원인중심 한상관, 이우성 등 : 2,000 건이상, : 1,000~2,000 건, : 500~1,000 건, : 250~500 건, : 250 건미만 주요기술주요출원인동향 주행기술분야는 Robert Bosch가가장많은특허를보유하고있으며, 그다음으로는 Toyota, IBM, irobot, Siemens 등이많은특허를보유하고있어글로벌대기업들이주류를이루고있음 위치인식및자율주행기술분야는 irobot이가장많은특허를보유하고있으며, 그다음으로는 IBM, Anki 등이많은특허를보유하고있는등로봇분야에주력하고있는회사들이주류를이루고있음 장애물파악및회피기술분야는항공기등에대해서항법을통해장애물을회피하는기술력을보유하고있는 Boeing사가가장많은특허를보유하고있으며, 그다음으로 irobot 등이많은특허를보유하고있음 215
224 기술개발테마현황분석 플랫폼설계기술분야는 IBM이가장많은특허를보유하고있으며, 그다음으로 Microsoft나 VMware 등이많은특허를보유하고있음 협업 / 협동기술분야는 Microsoft가가장많은출원을보유하고있으며, Cobot (Collaborative Robot) 기술에가장많은연구가이루어지고있음 선적기술과포장 / 분류기술분야는 IBM이가장많은출원을보유하고있으며, 그뒤를 Microsoft 등이보유하고있는등로봇분야에집중적으로투자하고있는기업이많은특허를보유하고있음 물류로봇분야의주요경쟁기술및공백기술 물류로봇분야의주요경쟁기술은주행기술, 플랫폼설계기술, 선적기술및포장 / 분류 기술이고, 공백기술은장애물파악및회피기술로나타남 주요기술 주행기술 기술집중도 위치인식및자율주행기술 장애물파악및회피기술 플랫폼설계기술 협업 / 협동기술 선적기술 포장 / 분류기술 : 2,000 건이상, : 1,000~2,000 건, : 500~1,000 건, : 250~500 건, : 250 건미만 216
225 물류로봇 최신국내특허기술동향 주요기술 최근핵심요소기술동향 로봇의토크강화, 스피드향상기술 주행기술위치인식및자율주행기술장애물파악및회피기술플랫폼설계기술협업 / 협동기술선적기술포장 / 분류기술 무거운짐을운반하는하중지지기술 무인화물이송 주변환경을센싱하여위치를인식하는기술 GPS나네트워킹등을이용하여위치를인식하는기술 다중의센서를이용하여장애물을파악 소리감지기술 서버, 네트워킹등을구성 플랫폼의보안구축 사용자행동인식기술 다수의로봇제어기술 수평유지및자세제어기술 로봇암제어기술 자동포장기술 자동분배투입장치 국내특허동향을살펴보면개인출원을중심으로연구개발이진행되고있으며, 유일하게플랫폼설계기술에있어서대기업중심으로연구개발이진행되고있는것으로나타남 주행기술은로봇의토크를강화하거나, 기어등을향상시켜스피드를향상시키는기술과무거운짐을운반할때하중을지지하는기술및무인화물이송기술등에연구개발이진행되고있음 위치인식및자율기술은자율주행을위해주변환경을센싱하여위치를인식하거나 GPS나네트워크기술등을이용하여위치를인식하는기술에연구개발이집중되고있음 장애물파악및회피기술은단일센서가아닌다중의센서를이용하여장애물을파악하거나소리등을추가적으로센싱하는기술에대하여연구개발이진행되고있는것으로나타남 플랫폼설계기술은삼성전자등의대기업을중심으로연구개발이진행되고있으며, 서버및네트워크등을구성하거나플랫폼의보안기술에대한연구개발이집중되고있음 협업 / 협동기술은사용자의행동을인식하여물류를위한작업을협동하거나다수의로봇을일괄적으로제어하는기술에대하여연구개발이진행되고있음 선적기술은물건의수평을유지시키거나, 자세를제어시키는기술과로봇암의쥐는힘등을제어하는기술에대하여연구개발이집중되고있는것으로나타남 포장 / 분류기술에대하여대부분의기술이자동포장기술에대하여연구개발되고있으며, 자동분배투입장치에대해서도연구개발되고있는것으로나타남 217
226 기술개발테마현황분석 중소기업특허전략수립방향및시사점 물류로봇의공백기술분야는장애물파악및회피기술이고, 중소기업의시장진입의시장진입이상대적으로수월한분야는위치인식및자율주행기술과장애물파악및회피기술및협업 / 협동기술로나타남 물류로봇분야는자동차, 항공, 선박항해, 군사용등의센서를이용하는기술에유용하게이용될수있음 물류로봇분야는플랫폼설계기술외에전반적으로대규모의자금이나투자가투입되는분야가아니기때문에중소벤처기업의참여가높은분야임 다중의센서와이들의오차를최소화하거나고속으로장애물등을파악하거나위치를파악하는센싱기술이특허확보전략의방향으로판단됨 향후중소기업은상대적으로경쟁이치열하지않은장애물파악및회피기술과상대적으로특허경쟁이치열하지않은위치인식및자율주행기술과협업 / 협동기술에대하여공공기관및연구기관과공동연구개발하여제품화하는특허전략을수립하는것이바람직할것으로사료됨 또한글로벌기업들이선점하고있는특허경쟁에서우위를점하기위한특허창출전략을강구해야될것으로판단됨 218
227 물류로봇 5. 연구개발네트워크 가. 연구개발기관 / 자원 연구개발기관 물류로봇분야주요연구개발기관 한국기계연구원 - 기존제조용로봇이적용되기어려운정밀조립, 핸들링, 포장작업등다양한공정에활용가능한첨단제조로봇 - 설치공간을최소화하고양팔동시작업으로작업효율성이높아수작업의존도가높은공정에적용가능 한국생산기술연구원융합생산기술연구소로봇그룹 ( 그룹장이동욱 ) - 필드로봇솔루션기술, 인지기반로봇지능및인간로봇상호작용기술, 원격작업을위한원격로봇핵심원천기술, 중소제조업용로봇융합공정기술개발 유진로봇 - 병원, 노인간병시설, 푸드코트등에서활용이가능한 고카트 (GoCart) 를판매중이며뉴질랜드오클랜드대학에수출하였음 - 고카트는스스로물건을실어나르는자율주행로봇으로사람이나장애물을인식해충돌을방지하고, IoT와센서를접목해엘리베이터를호출하고스마트빌딩내부시스템및다른기기들과연동이가능 - 위치인식, 경로계획, 자율이동, 안전이동등의기술을바탕으로물류자동화효율화가능 주식회사로비텍 - 하드웨어기반의로봇플랫폼을제공하며안내및위험작업등에사용되는로봇플랫폼기술개발 - 화물운반및 RFID 기반물류관리에이용할수있는 AGV 플랫폼개발 와이에스티티 (YSTT) - 자율주행로봇과협업로봇을기반으로로봇자동화솔루션을제공하는업체 - 이동을도와주는고정설비가필요하지않고, 다양한산업현장에유연하게대응할수있어작업내용변경도신속히가능. 장애물이나작업자를인지하고스스로주행경로를학습한뒤재설정해능률적으로임무수행 - 컨베이어기능뿐만아니라상하이동성을확보한 LC제품 (Lift Conveyor) 을확보 마로로보테크 - 물류로봇및산업용로봇전문기업으로올해 QR코드인식형물류로봇 M3 를개발해국내중소기업의생산물류자동화현장에납품하고있고, 사용자지정경로주행이가능함에따라공간제약이최소화되어다양한공간에서사용이가능함 219
228 기술개발테마현황분석 코어벨 - 구분적재로봇시스템 ( 팔레타이저 ) 은스마트로봇시스템을이용하여박스에적재된적재물의종류에따라동일한박스별로해당되는팔렛트에구분적재하는시스템이며, 산업용물류이송로봇시스템 ( 무인반송차 ) 은다양한산업현장에서물류이송에사용가능한자동화장비로자율경로계획수립및계획경로운행을하고시스템을현장여건에맞게설계할수있어효율성이증대됨 연구개발자원 국가연구개발지원사업 중소벤처기업부 - 중소기업기술혁신사업 - 상용화기술개발사업 ( 구매조건부등 ) - 융복합기술개발사업 - 산학연협력기술개발사업 - 제품서비스기술개발사업 - 중소기업 R&D 역량제고사업 - 제품 공정개선기술개발사업 - 맞춤형기술파트너지원사업 - 산연전용과제 : 우수 R&D 인프라를활용한대표적인중소기업지원연구기관으로연구부서와중소기업간연계를통한기술지원은물론변리사, 산학연협력코디네이터, 기술거래사, 기술가치평가사등기술사업화관련전담인력이사업화사안마다관여해고품질비즈니스컨설팅제공 산업통상자원부 - 에너지 자원기술개발사업 - 전략핵심소재기술개발사업 - 신재생에너지기술개발사업 - 산업융합원천기술개발사업등 - 로봇미래전략 (2013~2022) - 산업엔진프로젝트 (19대미래성장동력 ) - 사업화연계기술개발사업 ( 민간투자연계형등 ) 환경부, 국토교통부 - 글로벌탑환경기술개발사업 - 건설기술연구사업 - 대형시설, 물류창고등에이송로봇적용 보건복지부 - 병원內물류수요에병원용이송로봇시범적용 220
229 물류로봇 평창올림픽조직위원회 - 평창올림픽에안내, 홍보, 이송, 경비로봇등활용 로봇산업정책협의회 - 창의적 도전적로봇연구촉진을위한풀뿌리지원프로그램 한국로봇산업진흥원 - 로봇산업클러스터 : 센터와장비를구축하고, 기술사업화촉진및로봇창업맞춤형지원과상용화기술개발지원을통해의료, 사회안전, 제조분야의로봇산업육성을목표로함 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 - 시장창출형로봇보급사업 : 보건복지부와국립재활원이참여하는의료재활로봇보급사업으로산업통상자원부와부천산업진흥재단이참여하는시장창출형로봇부품보급사업등의공공수요형사업과아이디어발굴형사업을진행 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원 ) - e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 지능형로봇테스트베드 ( 한국전자통신연구원 ) - 지능형로봇테스트베드에서로봇시험장비및인프라구축, 로봇시험평가방법개발및시험인증체계구축, 로봇시험평가방법개발및시험인증체계구축, 지능형로봇시험지원서비스제공 221
230 기술개발테마현황분석 나. 연구개발인력 물류로봇분야는한국전자통신연구원, 한국과학기술연구원에서주로연구개발을진행하고 있음 정부는개방형로봇산업생태계조성을위해인력양성측면에서多기술영역업무수행및 다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형 로봇전문인력양성추진 [ 물류로봇분야주요연구조직현황 ] 기관한국전자통신연구원한국과학기술연구원충북대학교한양대학교군산대학교 222
231 물류로봇 다. 기술이전가능기술 (1) 기술이전가능기관 물류로봇의요소기술은크게위치인식및자율주행기술, 장애물파악및회피기술, 플랫폼설계기술, 협업 / 협동기술, 선적기술, 포장 / 분류기술의총네개의분류로구분됨 기술이전이가능한기관은한국과학기술연구원, 한국전자통신연구원, 고려대학교, 충북대학교, 한양대학교, 군산대학교가있음 [ 물류로봇요소기술연구조직 ] 분류요소기술기관 직선정보기반장소인식을이용한로봇의자율주행방법및자율주행로봇 한양대학교 위치인식및자율주행기술 레이저스캐너를이용한이동로봇의실내주행시스템및방법 이동로봇의지도형성방법및위치인식방법 충북대학교 고려대학교 스캐닝장치의움직임추적방법 한국과학기술연구원 장애물파악및회피기술 충돌회피및자율주행을위한센서융합기반하이브리드반응경로계획방법, 이를수행하기위한기록매체및이동로봇 군산대학교 플랫폼설계기술 병원물류로봇시스템을위한스케줄링및로봇상태모니터링기술한국전자통신연구원 협업 / 협동기술 사용자친화적인로봇이송장치 Navi-guider 기술 한국전자통신연구원 223
232 기술개발테마현황분석 (2) 이전기술에대한세부내용 분류 기술명 세부내용 직선정보기반장소인식을이용한로봇의자율주행방법및자율주행로봇 기술이전목적및필요성 본발명은직선정보기반장소인식을이용한로봇의자율주행방법및자율 주행로봇에관한것임 기술활용방안및기대성과 영상획득부가전면에배치된카메라를통해소정장소내현재위치에서전방을연속촬영하여복수개의영상을획득하는단계 ; 정보검출부가획득한상기복수개의영상으로부터상기소정장소에대한특징을나타내는직선정보및상기로봇의움직임변화를나타내는모션정보를검출하고, 검출한직선정보및모션정보를데이터베이스에저장하는단계 ; 지도생성부가복수개의키넥트센서를이용하여상기소정장소내장애물의존재여부를포함하는국소격자지도를생성하는단계 ; 위치판단부가상기복수개의영상내포함된직선정보에기초하여상기소정장소에대한장소를인식한후, 상기로봇의현재위치를판단하는단계 ; 경로획득부가상기데이터베이스로부터저장된모션정보를입력받아, 이에기초하여상기로봇의이동경로를획득하는단계 ; 및주행부가획득한상기이동경로를따라상기로봇을주행시키는단계 ; 를포함하는것을특징으로함 이러한구성에의해, 본발명의직선정보기반장소인식을이용한로봇의자율주행방법및자율주행로봇은상기로봇이해당장소내이전에방문한경우, 해당장소를촬영한영상만을이용하여지도없이도상기장소내원하는목적지로용이하게자율이동할수있는효과가있음 기술관련 세부문의 한양대학교 계약관련 224
233 물류로봇 분류 기술명 세부내용 충돌회피및자율주행을위한센서융합기반하이브리드반응경로계획방법, 이를수행하기위한기록매체및이동로봇 기술이전목적및필요성 자율이동로봇센서시스템을단순화하면서도, 실시간으로변화하는동적외부환경에대한효율적인반응경로계획제공- 자율주행이동로봇시스템구축시각종센서융합으로인해발생하는시스템의복잡성문제를키넥트 (Kinect) 와스마트폰기능의적용으로단순화시킬수있음 기술활용방안및기대성과 자율주행자동차, 무인로봇, 자율주행시스템에적용가능함 기술관련 군산대학교 세부문의 계약관련 ( 재 ) 전북테크노파크 225
234 기술개발테마현황분석 분류 기술명 세부내용 병원물류로봇시스템을위한스케줄링및로봇상태모니터링기술 기술이전목적및필요성 본기술은병원물류로봇시스템의운용을위해다수의로봇에필요한작업을 효율적으로할당하는스케줄링기술과, 작업시개별로봇의상태를확인하고 로봇에이상이발생하였을경우이를알려줄수있는모니터링기술로구성됨 기술활용방안및기대성과 스케줄링기술 : 기존의로봇적용이단일로봇위주로진행되고있으나기술의발전에따라다중로봇을사용하고자하는요구가확대될것으로판단됨. 이에맞춰본기술은다중로봇시스템에서다중작업을효율적으로할당하는것뿐아니라로봇의상황과새로운작업의지정정도에따라실시간으로리스케줄링하는것이가능하도록개발되었음 모니터링기술 : 로봇의활용시필연적으로발생하게되는유지 / 보수의문제를획기적으로향상시키기위해실시간으로로봇의상태를모니터링하며이를사용자나관리자에게알려주어이상상황발생시효과적으로대응할수있도록함. 또한로봇의작업상황데이터를연속적으로기록하도록하여추가적인기능개발시핵심자료로활용 병원 / 요양원내저하중 / 고하중물류이송시스템과창고, 공장등에서의효율적물류관리시스템, 놀이공원, 대형쇼핑몰등에서의고객탑승및상품운반시스템등에적용가능함 기술관련 세부문의 한국전자통신연구원 계약관련 226
235 물류로봇 분류 기술명 세부내용 사용자친화적인로봇이송장치 Navi-guider 기술 기술이전목적및필요성 로봇을사용하다보면, 사용자가로봇을직접이동시켜야할경우가빈번히발생하여이를위해조이스틱과같은이송장치가보통사용되는데, 이는실제사용에있어로봇을사용자가원하는위치로이동시키기위해서는불편한점이많음. 이런점을개선하기위하여, 본기술에서는로봇을사용자가손쉽게원하는위치및방향으로이동및제어하기위한이송장치로네비가이더 (Naviguider) 라는명칭의장치를개발함 기술활용방안및기대성과 네비가이더를이용할경우, 로봇을애완견을데리고산책하듯이사용자가직관적으로위치및이동속도를제어할수있으므로로봇이송에관한사용자친화적인기능구현가능 시리얼및 USB 통신으로어떤로봇에도독립적으로장착가능하므로, 기존로봇이나새롭게로봇을설계시에손쉽게장착이가능 바퀴가달린이동로봇뿐만아니라, 어떠한이동성을가지는운반체및이동체에적용가능하여그응용성이매우풍부함 네비가이더를구성하는하드웨어및주요부품은매우보편화되어사용되어지는엔코더및전위차계로구성되어있어제작에용의함 본기술은이동로봇과같이바퀴가장착된장비를제어하기위한사용자친화적이고효과적인방법을제안하고있어, 물류로봇, 이동용카트, 여행용가방등에장착되어사용자가편하게이동체를이송하는데사용될수있음 기술관련 세부문의 한국전자통신연구원 계약관련 227
![기술개발테마현황분석 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 물류로봇분야키워드클러스터링 ] [ 물류로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1.](/docs-images/93/112329278/images/236-1.jpg "A parameter communication optimization strategy for distributed machine learning in sensors 클러스터 01 machine, learning 6~8 2. A comparison of distributed machine learning platforms 3.")
236 기술개발테마현황분석 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 물류로봇분야키워드클러스터링 ] [ 물류로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1. A parameter communication optimization strategy for distributed machine learning in sensors 클러스터 01 machine, learning 6~8 2. A comparison of distributed machine learning platforms 3. Rapid method of pattern recognition, machine learning, and automated genotype classification through correlation analysis of dynamic signals 228
237 물류로봇 No 주요키워드연관도수치관련특허 / 논문제목 1. Optimizing virtual machine placement in distributed clouds with M/M/1 servers 클러스터 02 virtual, machine, server 5~6 2. Distributed environment for efficient virtual machine inage management in federated Cloud architectures 3. Method and system for distributing hypervisor functionality over multiple physical devices in a network and configuring sub-hypervisor to control the virtual machines 1. An introduction to automated brazing - Part 2: Trolley- and continuous conveyor machines 클러스터 03 conveyor, belt 3~4 2. An inspection robot using infrared thermography for belt conveyor 3. Conveyor belt, conveyor belt assembly including an imaging system, and methods of using the same 1. Cooperative multi-robot information acquisition based on distributed robust model predictive control 클러스터 04 network, information 6~7 2. Distributed information system for collaborative robots and IoT devices 3. System and method for processing information via networked computers including request handlers, process handlers, and task handlers 1. Distributed multi-robot coordination for dynamic perimeter surveillance in uncertain environments 클러스터 05 environment, image 7~8 2. Distributed environment for efficient virtual machine image management in federated Cloud architectures 3. Method for managing user requests in a distributed computing environment, distributed computing environment and computer program product 1. Distributed in-memory computing on binary memristor-crossbar for machine learning 클러스터 06 distributed, computing 5~7 2. Panorama of real-life applications in logistics embedding bin packing optimization algorithms, robotics and cloud computing technologies 3. Automatic configuration information generation for distributed 클러스터 07 mobile, device 7~9 computing environment 1. Distributed self-deployment of mobile wireless 3D robotic sensor networks for complete sensing coverage and forming specific shapes 2. Distributed machine learning with self-organizing mobile agents for earthquake monitoring 3. Distributed system of autonomously controlled mobile agents 229
238 기술개발테마현황분석 No 주요키워드연관도수치관련특허 / 논문제목 1. Multi-rate LQR control of a multi-machine MVDC shipboard electric distribution system with constant power loads 2. Genetic algorithm design of an adaptive, multirate LQR 클러스터 08 distribution, control 3~5 controller for a multi-machine MVDC shipboard electric distribution system with constant power loads 3. Apparatus and methodology for enhancing efficiency of a power distribution system having power factor correction capability by 클러스터 09 robotic, manipulator 4~7 using a self-calibrating controller 1. Task-space fully distributed tracking control of networked uncertain robotic manipulators without velocity measurements 2. Model-based distributed cooperative control of a robotic manipulator 3. System for configuring a robotic manipulator 1. Device for assembling and feeding small sized articles to a packaging machine. 클러스터 10 packaging, machine 5~6 2. machine for packaging products in rigid or semirigid trays sealed across the top by a thermoplastic film, particularly for producing packs in a modified atmosphere 3. Assembly for unwinding and cutting a film, particularly for packaging machines and the like 230
239 물류로봇 (2) 요소기술도출 산업 시장분석, 기술 ( 특허 ) 분석, 전문가의견, 중소기업기술수요를바탕으로로드맵기획을위한요소기술도출 [ 물류로봇분야요소기술도출 ] 분류요소기술출처 주행기술기계 / 제어기술영상인식기술센서기술 대용량상호인식자료처리기술자율주행알고리즘자기위치추정기술위치인식을통한장애물회피기술플랫폼설계기술협업 / 협동기술선적기술포장 / 분류기술이송 / 핸들링기술다축제어용제어기기술동작메커니즘모듈기술원거리광역영상합성기술 2D/3D Texture-Depth 정보합성및환경인식기술정밀작업을위한 3인칭임의시점구현기술인명탐지기술발화점 / 가스누출지점탐지기술원격제어를위한인터렉션기술다중센서융합활용기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천 기술수요, 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천 기술수요, 기술 / 시장분석, 전문가추천 기술수요, 기술 / 시장분석, 전문가추천 전문가추천, 특허 / 논문클러스터링 231
240 기술개발테마현황분석 (3) 핵심요소기술선정 확정된요소기술을대상으로중소기업에적합한핵심요소기술선정 [ 물류로봇분야핵심요소기술 ] 분류핵심요소기술키워드 기계 / 제어기술 다축제어용제어기기술 동작메커니즘모듈기술 다축제어관련모듈화기술 센서및회로를통한동작메커니즘기술 주행 / 센서기술 자기위치추정기술 위치인식을통한장애물회피기술 대용량상호인식자료처리기술 자율주행알고리즘 신호제어기술을통해얻은데이터를이용한자기위치추정기술 장애물의판단및장애물의종류파악과상황에맞는회피기술 항공에서지상의물체에대한인식및로봇간상호인식 상호인식알고리즘과위치인식알고리즘을이용한자율주행알고리즘완료 232
241 물류로봇 나. 물류로봇기술로드맵 최종중소기업기술로드맵은기술 / 시장니즈, 연차별개발계획, 최종목표등을제시함으로써 중소기업의기술개발방향성을제시 233
242 기술개발테마현황분석 다. 연구개발목표설정 핵심요소기술별최종목표는아래와같이기술요구사항과연차별개발목표로제시함 [ 물류로봇분야핵심요소기술연구목표 ] 분류핵심요소기술기술요구사항 연차별개발목표 1 차년도 2 차년도 3 차년도 최종목표 기계 / 제어기술 다축제어용제어기기술 동작메커니즘모듈기술 센서및응용 센서및응용 복합센서와연계한부품기술개발 지능형동작제어메커니즘 오감센서다축부품기술적용제품화 자율동작제어메커니즘 다축제어부품의모듈화 지능형동작제어메커니즘모듈화 다축제어관련모듈화기술 센서및회로를통한동작메커니즘기술 주행 / 센서기술 자기위치추정기술 위치인식을통한장애물회피기술 대용량상호인식자료처리기술 자율주행알고리즘 신호처리 센서및제어기술 센서, 신호처리및제어기술 프로그램 센서데이터이용위치추정기술 실시간정보획득제어 실시간데이터신호처리기술 이동물류로봇의알고리즘 실시간위치추정기술 움직이는환경포함위치획득및실시간제어 신호처리및적용 주행알고리즘확보 이동중실시간데이터확보및위치추정 장애물에대한인식및우선권확보기술 다양한목표에대한인식기술향상 로봇의실외환경에서의주행알고리즘 신호제어기술을통해얻은데이터를이용한자기위치추정장애물의판단및장애물의종류파악과상황에맞는회피기술항공에서지상의물체에대한인식및로봇간상호인식상호인식알고리즘과위치인식알고리즘을이용한자율주행알고리즘완료 234
243 기술개발테마현황분석 스포츠시뮬레이터 로봇
244
245 스포츠시뮬레이터로봇 정의및범위 스포츠시뮬레이터로봇이란스포츠활동의실제적인움직임을모사하는로봇으로, 실제스포츠환경의제약요인으로부터벗어나효과적인스포츠활동을가능하게하고실감나는가상의스포츠체험을제공하기위한소프트웨어와하드웨어기술을의미 스포츠시뮬레이터로봇기술은모션플랫폼기술, 플랫폼해석및제어기술, 실감재현콘텐츠기술, 사용자인터랙션기술, 스포츠교육및평가기술등을포함정부지원정책 10대유망가상스포츠종목을선정, 체감형스포츠시뮬레이터의핵심요소기술개발지원으로스포츠 ICT 기술벤처시장활성화지원 문화체육관광부는스포츠산업의신성장동력화일환으로과학기술정보통신부와공동으로신기술이적용된스포츠분야지속발굴등신기술융복합스포츠산업육성을정책과제로선정 과학기술정보통신부와문화체육관광부는창조경제혁신센터, 관련기업과전문가등으로스포츠융복합화정책방안마련을위한창조경제융합스포츠산업육성협의체구성 과학기술정보통신부는로봇기술과가상현실기술을결합한스포츠콘텐츠산업의발전을위해 ICT융합스포츠콘텐츠개발지원사업을시행하고 ICT융합스포츠체험관설치중소기업시장대응전략 강점 (Strength) ( 환경 ) 스포츠시뮬레이터활용인구증가 ( 기술 ) 뛰어난 ICT 인프라를통해융복합제품개발가능 ( 정책 ) 정부의적극적인육성정책기회 (Opportunity) ( 환경 ) 로봇과연계된가상현실 콘텐츠시장이확대중 ( 기술 ) 스크린스포츠시뮬레이터연구개발증가 ( 정책 ) 빠른수출을위한현지화지원정책필요 약점 (Weakness) ( 환경 ) 상대적으로영세한업체들의비율이높음 ( 기술 ) 개발도구등핵심요소기술에대한국산화비중낮음 ( 정책 ) 맞춤형서비스에대한지원낮음위협 (Threat) ( 환경 ) 미국, 일본의산업경쟁력상승 ( 기술 ) 선진기업과의큰기술격차 ( 정책 ) 해외업체의국내진입전특허의권리화정책필요 중소기업의시장대응전략 교육, 유통, 게임, 미디어, 엔터테인먼트등타산업과의융복합을통한기술경쟁력확보 실제스포츠움직임에가까운실감구현을위해로봇기술뿐만아니라 AR/VR, 오감자극기술등과의융합시도 개발기간및비용절감을위해다수스포츠종목으로확장가능한공통플랫폼개발필요
246 핵심요소기술로드맵


247 스포츠시뮬레이터로봇 1. 개요 가. 정의및필요성 스포츠시뮬레이터로봇이란스포츠활동의실제적인움직임을모사하는로봇을의미하며, 실감나는가상의스포츠체험을제공하기위한소프트웨어와하드웨어기술을의미함 스포츠과학과인공지능, 가상현실, 로봇기술, 빅데이터등의 ICT 기술이융합된실감스포츠시뮬레이션환경은새로운스포츠산업영역을창출할것으로예상 스포츠종목에대한전문적인교육훈련또는운동효과를제공하거나가상환경에서몰입감높은스포츠의체험을가능하게함 스포츠시뮬레이터로봇기술은모션플랫폼기술, 플랫폼해석및제어기술, 실감재현콘텐츠기술, 사용자인터랙션기술, 스포츠교육및평가기술등을포함 [ 스포츠시뮬레이터로봇주요기술구성 ] 삶의질의향상과건강에대한관심확대로스포츠참여인구의증가 스포츠를통한체력증진및삶의질향상추구, 각종문화활동의대중화에따른스포츠참여인구의증가및다양화 지리적환경, 계절적요인, 고가의장비나시설등의제약요인을극복할수있는스포츠시뮬레이션시스템의요구증대와미래형스포츠문화공간의창출이필요 실제환경에서익스트림스포츠와같이상해위험이높은스포츠를가상의시뮬레이션환경을통해안전하게체험할수있는소비욕구증대 전문선수를위한고난도기술습득및과학적트레이닝을위한스포츠시뮬레이션플랫폼에대한필요성증대 239
248 기술개발테마현황분석 4차산업혁명과스포츠의결합을통한스포츠산업의변혁 인공지능, 빅데이터, 클라우드, 사물인터넷, 가상현실등 4차산업혁명을대표하는기술들이스포츠산업에도적용되기시작했고미래스포츠산업의변화를유도할것으로예측 대량생산방식에서벗어나사물인터넷, 빅데이터, 3D 프린팅등의신기술과의결합을통해다품종변량생산과수요자맞춤생산을가능하게하는스마트팩토리도스포츠용품산업의변화를초래 가상현실, 증강현실, 혼합현실기술을이용한실내스포츠체험이나인공지능, 웨어러블기기, 드론, 모바일기술등의유기적연계를통한기존에없었던새로운스포츠서비스를창출가능 스포츠과학과 ICT 기술의융합을통한스포츠산업의체계화 몰입감있는스포츠환경을제공하고능동적인참여를위해재미를유발하며스포츠과학적모델에기반한가상스포츠시뮬레이터필요 ICT와과학기술발전으로스포츠용품산업및서비스산업, 스포츠산업과관광, BT, NT 등다른산업과의결합을통하여스포츠산업의범위확대 스포츠시뮬레이터기술은센싱, 기구설계및제어, 콘텐츠등타분야와밀접하게연관되어있어파급효과가크고새로운비즈니스기회를창출할기회를확대할수있음 고실감모션제어및사용자맞춤형서비스로스포츠현장감최대화 단순모션의기구부모듈과저실감형가상현실시스템및전문콘텐츠부족으로인한한계성극복필요 실감형시뮬레이터의핵심기술인정밀구동메커니즘및지능제어기술을바탕으로사용자의즐거움및건강증진을위해필요한모션생성을위한정밀메커니즘및제어기술 지속적인흥미유발및활동유지를위한사용자와스포츠시뮬레이터간의상호작용기술, 고품질의모션피드백및비주얼가시화기술이필요 사용자의개인별특성에맞는맞춤형서비스의제공을위한인식기술이필요하며, 사용자의상태에맞는모션을제공하여사용자로하여금시뮬레이터와의감성적공감을이룰수있는기술도포함 평창올림픽및동계스포츠관련신시장개척 동계스포츠는경기의특성때문에하계스포츠나생활스포츠종목보다시간, 공간, 비용등의제약이많아실감스포츠시뮬레이터에대한소비자의니즈증대예상 실내가족스포츠로발전할수있는종목을발굴하여동계스포츠시뮬레이터를개발하고체험시설을통해평창올림픽에대한일반인들의관심과참여를유도하고스포츠관광인구확대 240
249 스포츠시뮬레이터로봇 나. 범위 (1) 제품분류관점 스포츠시뮬레이터로봇은모션플랫폼, 플랫폼해석및제어, 실감재현콘텐츠, 사용자인터랙션, 스포츠교육및평가등에따라다양한기술로분류 모션플랫폼기술은스포츠종목별특성에적합한모션베이스, 기구, 센서, 액추에이터등포함 플랫폼해석및제어기술은스포츠시뮬레이터기구해석, 구동, 제어기술등포함 실감재현콘텐츠기술은실감효과생성장치, 실감 / 가상 / 증강콘텐츠, 멀티타입디스플레이와비정형스크린실감표현지원기술등포함 사용자인터랙션기술은지능소프트웨어플랫폼으로복합상황인지, 사용자인식, 자세인식, 사용자인터페이스등을포함 스포츠교육및평가기술은스포츠모션정밀분석, 버추얼코칭, 스포츠전문데이터베이스, 운동효과진단및평가등포함 스포츠환경정보수집기술은스포츠주변환경구축, 환경정보수집, 위치인식, 유무선통신, 운동장비배치등포함 [ 제품분류관점기술범위 ] 기술개발테마 제품분류관점 세부기술 모션플랫폼 스포츠모션구현을위한다자유도모션플랫폼기구부기술 모션플랫폼용서보모션제어및실감모듈형하드웨어기술 플랫폼해석및제어 스포츠운동좌표계분석, 기구학해석, 동역학해석검증기술 시뮬레이션시각화, 동역학기반시뮬레이션제어기술 스포츠시뮬레이터로봇 실감재현콘텐츠 사용자인터랙션 스포츠시뮬레이터용실감재현장치, 실감렌더링기술 실감콘텐츠표현, 동역학피드백이펙트구현기술 복합상황인지기반사용자인터랙션기술 사용자맞춤형서비스제공, 사용자자세인식및분석기술 교육및평가 버추얼코칭, 스포츠전문데이터베이스기술 생체신호기반진단및운동효과측정 / 평가기술 환경정보수집 실시간고정밀위치인식및유무선통신기술 주변환경구축및인식, 운동장비배치기술 241
250 기술개발테마현황분석 (2) 공급망관점 스포츠시뮬레이터로봇기술은다양한스포츠종목에적합한스포츠활동을하는데활용가능하며, 이러한기술을지원하기위한공급망단계별로구분가능 스포츠시뮬레이터로봇관련스포츠용품및장비에는신체신호측정과인체동작인식등을위한웨어러블기기와가상현실시뮬레이션용품, 시뮬레이션센서장치등을포함 스포츠시뮬레이터로봇기구및시설에는모션플랫폼, 피트니스및트레드밀형시뮬레이터, 승마, 요트, 스키, 스노우보드, 봅슬레이, 싸이클, 항공스포츠, 워터스포츠, 모터스포츠등의탑승형스포츠시뮬레이터기구및시설등을포함 광의의관점으로는골프시뮬레이터를포함하여야구, 축구, 농구, 하키, 테니스시뮬레이터등과같은스크린중심의스포츠시뮬레이터도포함할수있지만, 협의의관점으로는스포츠시뮬레이터로봇은모션베이스등의모션플랫폼을갖춘스포츠시뮬레이션시스템으로국한 스포츠시뮬레이터로봇소프트웨어에는실감콘텐츠, 물리엔진, 저작도구, 스포츠시뮬레이터통합운용소프트웨어등을포함하며, 맞춤형체력관리, 스포츠기술학습, 버추얼코칭과관련한어플리케이션프로그램과모바일앱등을포함 스포츠시뮬레이터로봇응용서비스에는스포츠교육, 스포츠경기, 스포츠정보지원등스포츠서비스와관련하여적용가능한기술과부대설비기술등을포함 [ 공급망관점기술범위 ] 기술개발테마 공급망관점 세부기술 용품및장비 웨어러블기기 ( 신체신호측정, 인체동작인식, 운동기능학습등 ) 가상현실시뮬레이션용품, 센서장치, 데이터기록장비등 스포츠시뮬레이터로봇 기구및시설 소프트웨어 모션플랫폼 ( 유압식, 공압식, 전기식등 ) 피트니스및트레드밀형시뮬레이터기구 탑승형스포츠시뮬레이터기구및시설 실감표현소프트웨어, 콘텐츠저작도구, 통합운용소프트웨어 맞춤형체력관리, 스포츠기술학습소프트웨어 스포츠시뮬레이터연동앱등 응용서비스 스포츠교육, 운동효과평가, 스포츠정보지원서비스등 242
251 스포츠시뮬레이터로봇 2. 외부환경분석 가. 산업환경분석 (1) 산업의특징 스포츠분야의전략적기술개발과글로벌경쟁력제고로고부가가치창출을위한중요한산업 스포츠산업은성장잠재력이높은산업으로서, 부가가치창출효과가높고일자리를만드는효과도큰산업으로, 융복합을통한시너지효과창출로경제발전에기여할것으로기대 월드컵, 올림픽등각종국제스포츠이벤트유치및우수성적기록등스포츠강국으로서의성과에비해스포츠산업의경쟁력과산업적가치연계는미흡 세계최고의 ICT 인프라와기술력을스포츠산업에접목해미래성장산업으로발전시키고선진화된스포츠환경을구축하기위한전략수립이필요 스포츠시뮬레이터로봇은스포츠와다양한산업과의높은연계성으로새로운시장을창출 스포츠산업은제조업, 정보통신, 유통, 엔터테인먼트, 미디어등다양한산업과의연계성이높고, 신소재, 바이오, 나노등과학기술이적용된첨단제품과서비스개발을위한국가간경쟁치열 스포츠와첨단과학기술을바탕으로복합산업의특성을이용하여신시장개척과고용창출이가능하고, 미디어, 관광, 엔터테인먼트등의타산업과의융합으로새로운비즈니스기회창출 스포츠의대중화및경제적가치를높이고, 동종ㆍ이종간결합을통해새로운상품과영역을창출하고스포츠산업생태계기반조성 가상현실, 증강현실, 인공지능, 빅데이터, 사물인터넷, 스마트웨어기술등 4차산업혁명신기술을스포츠에적용하여새로운시장창출증대 고령화및여가시간증가에따라건강한삶을영위하기위한생활스포츠에서의활용도증가 국민소득의증가, 여가시간의증가와건강에대한관심이높아지면서생활스포츠참여율이증가하고그에따른스포츠활동관련소비도증가 국민 1인당연간스포츠활동관련소비지출의규모는 2008년 402,588원에서 2014년 636,132원으로 1.6배증가 ( 문화체육관광부 2014) 생활스포츠참여율 ( 주 1회이상 ) 은 2003년조사에서급한증가세를보이고주춤한이후, 2012년 43.3% 에서 2016년 59.5% 로 1.4배증가하였으며, 점차적인증가추세에있음 ( 문화체육관광부국민생활체육참여실태조사 2016) 243
252 기술개발테마현황분석 * 출처 : 문화체육관광부, 국민생활체육참여실태조사 (2016) 단순일회성흥미위주보다는지속적인참여를유도할수있는기술이필요하며, 사회적으로고령화문제가대두됨에따라생활스포츠참여를통한건강한삶유지요구 스포츠체험을통한다양한신체활동에따른경제적가치향상이룰수있으며, 스포츠시뮬레이션지원을통해보다효율적으로직접또는간접적인스포츠경험으로삶의질향상 신제품과신규서비스출시로스포츠산업의외연확장 스포츠산업은스포츠와관련된재화와서비스를통하여부가가치를창출하는산업으로스포츠시설업, 스포츠용품업, 스포츠서비스업으로분류 우리나라스포츠산업총매출액은 2014년 63.1조원에서 2015년 65.1조원으로약 3.2% 증가하였고, 2015년영업이익은 5.8조원으로 9.0% 의이익률을나타내고있으며, 매출액중스포츠용품업의운동및경기용품소매업이가장많은 23.8% 를차지 (2015 스포츠산업백서 ) 경제전체에서직간접적으로유발되는부가가치단위를보여주는부가가치유발계수도스포츠산업은 0.791로전체산업평균 0.687보다도높고, 스포츠산업취업유발계수는 14.4( 명 /10억원 ) 로전체산업평균 12.4( 명 /10억원 ) 보다높음 (2015 스포츠산업백서 ) 스크린스포츠, 스포츠시뮬레이터장치, 실감스포츠콘텐츠등기존산업분류에포함되지않는신제품과서비스출시 4차산업혁명신기술접목을통한수요자맞춤형스포츠용품및고품질스포츠서비스로의파급효과기대 스포츠산업중장기계획수립과중점추진과제채택등정부의스포츠산업지원정책확대 스포츠로대한민국을바꾸기위한네가지전략이담긴스포츠비전 2018 발표하고, 경제를살리는 스포츠의일환으로스포츠산업의잠재력을가시화하는정책시행 ( 문화체육관광부, 2013 년 8 월 ) 244
 과학기술정보통신부와문화체육관광부는창조경제혁신센터, 관련기업과전문가등으로스포츠융복합화정책방안마련을위한창조경제융합스포츠산업육성협의체구성")
253 스포츠시뮬레이터로봇 선진국모방형에서新시장선도형구조로전환을위해국내 ICT 선진기술을접목한스포츠활동정보앱 기기개발, 스포츠정보서비스, 10대가상스포츠시뮬레이터개발지원 가상스포츠시장의성공모델인골프존의스크린골프부각이후, 뚜렷한후속스포츠콘텐츠부재로가상스포츠시장이정체됨에따라 10대유망가상스포츠종목을선정, 체감형스포츠시뮬레이터의핵심요소기술개발지원으로스포츠 ICT 기술벤처시장활성화지원 문화체육관광부는태권도와골프, 사격, 양궁등경기강세종목, 배드민턴및야구등생활체육수요가많은종목에대한가상현실스포츠콘텐츠의제작과 2018 평창올림픽관련동계스포츠가상현실콘텐츠제작지원 (2016년 7월 ) 과학기술정보통신부와문화체육관광부는창조경제혁신센터, 관련기업과전문가등으로스포츠융복합화정책방안마련을위한창조경제융합스포츠산업육성협의체구성 (2016년 8월 ) 과학기술정보통신부는로봇기술과가상현실기술을결합한스포츠콘텐츠산업의발전을위해 ICT융합스포츠콘텐츠개발지원사업을시행하고 ICT융합스포츠체험관설치 (2016년 9월 ) 문화체육관광부는스포츠산업의신성장동력화일환으로과학기술정보통신부와공동으로신기술이적용된스포츠분야지속발굴등신기술융복합스포츠산업육성을정책과제로선정 (2017년 1월 ) 용이한스포츠참여기회제공과스포츠융복합산업지원을통한저변확대 과학기술정보통신부는대구디지털산업진흥원주관하는 ICT스포츠사업의일환으로융합스포츠교실을운영 (2016년 6월 ) ICT융합스포츠콘텐츠는로봇기술과가상현실, 3D, 스마트센서기술을스포츠에적용한것으로대구아양중학교를대상으로융합스포츠교실시범사업실시 문화체육관광부와국민체육진흥공단은신체적 사회적 경제적제약으로체육활동을원만하게할수없는학생들의비율이높은초등학교 10개교를선발해가상현실스포츠실설치지원사업실시 (2017년 4월 ) - 서울옥수초등학교를대상으로시범운영 * 출처 : 전자신문, 문화체육관광부, 융합스포츠교실 ( 좌 ) 과가상현실스포츠실 ( 우 ) 열기구및래프팅체험, 사격, 우주체험이가능한큐브가상현실존, 카레이싱, 어트랙션슈팅게임이지원되는익스트림가상현실존등으로구성된국내최대규모의도심형가상현실테마파크몬스터브이알 (VR) 을인천송도에개소 (2017년 8월 ) 245
 * 출처 : 대전시, 지역융복합스포츠산업거점육성사업 스포츠에대한관심확대와경기수준향상으로보다나은스포츠산업기술요구 스포츠산업은지속적으로규모가확대되고비중도점차증가하고있는추세이며,")
254 기술개발테마현황분석 대구테크노파크스포츠융복합산업지원센터는스포츠저변확대및스포츠산업의시장경쟁력확보를위한국내스포츠 ICT 융복합산업의핵심거점화를위한 융복합스포츠산업거점육성사업 을문화체육관광부지원으로 2015년부터실시 대전시는문화체육관광부와국민체육진흥공단이지원하는 지역융복합스포츠산업거점육성사업 을통해스포츠관련창업교육과역량강화교육등을실시 - 주요추진사업은대덕연구개발특구등지역과학인프라를활용한스포츠 ICT 헬스케어분야와스크린스포츠, 사이버스포츠, 실감형스포츠시뮬레이터개발지원등 (2017년 8월 ) * 출처 : 대전시, 지역융복합스포츠산업거점육성사업 스포츠에대한관심확대와경기수준향상으로보다나은스포츠산업기술요구 스포츠산업은지속적으로규모가확대되고비중도점차증가하고있는추세이며, 스포츠산업의확대에따라보다스포츠이용에용이하고고실감의시뮬레이션및전문데이터처리기술요구 안전하고효율적인스포츠관련제품의기술개발을통하여스포츠산업활성화에기여할뿐만아니라스포츠시뮬레이터로봇을통해사용자맞춤형서비스와경기력향상기회제공가능 246
255 스포츠시뮬레이터로봇 (2) 산업의구조 스포츠시뮬레이터로봇은전방산업으로전문 / 생활스포츠, 피트니스, 웰니스산업과같은전반적인스포츠산업등과연관관계이며, 후방산업으로는센서, 액추에이터, 구동, 제어, 유무선통신등과연관되어있는구조 전방산업인스포츠산업의성장에따라스포츠시뮬레이터로봇산업도활성화되고, 이에따라로봇을구성하는센서, 액추에이터, 디스플레이, 제어, 모델링등과같은후방산업의성장및투자효과기대 후방산업인장치, 부품산업은글로벌 ICT 제조기술력과인프라, 첨단제품에부품을공급한기술력과생산기반을갖춘국내업체에게기회가될수있으나초기투자에대한위험부담이있어전략적육성이필요 다양한전방산업과의연계성이있어교육, 유통, 게임, 미디어, 엔터테인먼트등타산업과의융복합을통한글로벌기술경쟁력선점이요구되는산업 스포츠산업에서교육분야의직접적인점유율은높지않으나간접적인효과가큰분야로, 인성함양과체력향상등에대한관심과요구가증가함에따라스포츠교육이부각되고있음 유통분야도스포츠산업의중요한연계역할을하는분야로, 2015년스포츠산업진흥법개정안이국회를통과하여 2016년 8월부터시행되고있는데, 스포츠산업육성에필요한행정, 재정적지원의법적근거마련뿐만아니라스포츠소비자의편익과유통의활성화를위한제도적장치가마련됨 게임분야에있어서블리자드는오버워치에서 e스포츠로는처음으로지역연고제를도입하여세계의유수도시들이참여하고있음 문화체육관광부 2016년 e스포츠실태조사보고서에따르면한국 e스포츠산업규모는 723억원규모로세계시장의 10% 를차지하며, 경제적파급효과는생산유발효과 1,413억원, 부가가치유발효과 554억원에달할것으로추산 스포츠이벤트는각종미디어의중요한방송콘텐츠로다루어지고있고, 기업들의중요한마케팅수단이되고있음 - 또한미디어의디지털화에따른방송과통신의융합으로플랫폼을다양화한다는점에서스포츠산업으로서는좋은기회가될수있음 엔터테인먼트분야에있어서스포츠경기외적인문화를통해고객들에게흥미를유발하거나엔터테인먼트업계가스포츠마케팅을새로운비즈니스모델로접근하는등스포츠산업과의접목을통해시너지효과를기대 후방산업은 ICT 산업과연계되어스포츠산업의첨단화에기여할것으로예상되며, 지속적으로수요가증가할것으로전망되는산업 스포츠시뮬레이터로봇분야는시장규모에비해높은기술수준이요구되어일부전문중소기업에서개발에참여하고있으나초기투자에대한비용부담으로후방산업관련부품기술개발을기피하고해외의존도가심화되고있어미래가치확보를위한노력필요 247
256 기술개발테마현황분석 스포츠시뮬레이터로봇모션의정밀한시뮬레이션을위한구동및제어기술과스포츠종목의운동좌표계를분석하고기구학을해석하며동역학을이용하여해석결과를사전검증하고시뮬레이션가시화를통해효율적인제어를위한지원기술필요 후방산업인디스플레이, 실감장치, 콘텐츠, 데이터베이스, 사용자상호작용, 휴먼인터페이스등의분야와도유기적인연계가중요하며, 시스템통합및제품화를위한적극적인투자도필요 스포츠산업은타부문에비해부가가치유발계수와고용유발계수가높고경제적파급효과가큰산업이나국내업체의영세성으로인해생산성이낮고시장경쟁력은미흡하므로이에대한대응전략이필요하고, 신기술융합을통한트렌드변화에대처할수있는여건조성필요 가상현실, 인공지능, 빅데이터, 사물인터넷등신기술출현으로인한후방산업의확대에대한적절한대응과세계최고의 ICT 인프라와기술력을스포츠산업에접목해새로운시장을선점하기위한전략수립필요 전방산업인피트니스, 웰니스, 교육, 유통, 관광, 게임, 미디어, 엔터테인먼트등의산업과융복합을통해스포츠시뮬레이터로봇산업뿐만아니라스포츠산업의글로벌육성기회 [ 스포츠시뮬레이터로봇분야산업구조 ] 후방산업스포츠시뮬레이터로봇분야전방산업 센서, 액추에이터, 구동, 제어, 모델링, 유무선통신, 실감장치, 디스플레이, 콘텐츠, 상호작용, 데이터베이스, 데이터처리 스포츠시뮬레이션용품및장비, 스포츠시뮬레이터로봇기구및시설, 소프트웨어, 스포츠응용서비스 전문스포츠산업, 생활스포츠산업, 피트니스, 웰니스산업, 스포츠교육, 콘텐츠유통, 게임, 미디어, 엔터테인먼트산업등 248
257 스포츠시뮬레이터로봇 나. 시장환경분석 (1) 세계시장 스포츠시뮬레이터로봇기술은스포츠과학과 ICT 기술의융복합을통해새로운시장을창출하고관련요소기술의시장도확대될것으로전망되며, 스포츠산업은제조업, 정보통신, 유통, 엔터테인먼트, 미디어등다양한산업과의연계성이높아수요의정확한예측은어려움 스포츠시뮬레이터로봇분야의세계시장규모는 2016년 20.84억달러규모로추산되며 2021년 33.18억달러규모로연평균 9.8% 성장할것으로전망 스포츠시뮬레이터로봇시장규모현황과전망에서는골프시뮬레이터와같은모션플랫폼이없는스크린스포츠시장은제외하고예측함 [ 스포츠시뮬레이터로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 세계시장 2,084 2,291 2,493 2,747 3,021 3, * 출처 : MarketsandMarkets(2015) Service Robotics Market - Analysis & Forecast to 2020, MarketsandMarkets(2015) Motion Simulation Market Forecast to 2020, Frost&Sullivan(2016) Global Outlook for the Healthcare Industry, KEIT PD Issue Report ( ), 디지털콘텐츠산업분석자료, Transparency Market Research 자료로추정계상 스포츠시뮬레이터로봇모션플랫폼시장규모의전망을위해서비스로봇시장규모와모션시뮬레이션시장규모로살펴보면, 서비스로봇에대한사회적요구가다양해짐에따라서비스로봇의시장도확대되고있고, 국방수요가중심이되고있는모션플랫폼은스포츠를포함하여제조, 교육, 의료등전방위로확산되면서시장이확대될전망 세계서비스로봇시장규모는 2015년 81억달러에서연평균 17.36% 증가율을보이며 2020년에는 180억달러로성장예상 (MarketsandMarkets, ) 국제로봇연맹 (IFR) 에따르면전체로봇시장에서서비스로봇시장의비중은 2015년기준으로 38% 정도로추정 (IFR, World Robotics 2016) 세계서비스로봇시장에서엔터테인먼트및레저로봇시장규모는 2016년 2.1백만대에서 2017년 2.5백만대 (1.1억달러 ) 로약 22% 증가가예상되며, 2018년부터 2020년까지 10.5백만대 (7.5억달러 ) 로연평균 20~25% 성장할것으로전망됨 (IFR, 2017) 249
![기술개발테마현황분석 Entertainment and Leisure Robots * 출처 : IFR, Executive Summary World Robotics 2017 Service Robots [ 엔터테인먼트및레저로봇세계시장현황및전망 ] 세계모션시뮬레이션시장규모 (Automotive, Defense, Entertainment,](/docs-images/93/112329278/images/258-0.jpg "Healthcare, Mining, R&D, Sports, and Textile 모두포함 ) 는 2015 년 326.4 억달러에서연평균 6.97% 씩증가해 2020 년에 457.2 억달러에도달할것으로전망 (MarketsandMarkets, 2015.")
![4) * 출처 : Press Releases, Investor Relation Presentations, Annual Reports, Expert Interviews, and MarketsandMarkets Analysis [ 모션시뮬레이션세계시장현황및전망 ] 모션시뮬레이션시장점유율은북미가가장많은 56% 의점유율을보이고있고 (2014년), 이는](/docs-images/93/112329278/images/258-1.jpg "2015년에서 2020년사이연평균 5.50% 씩증가할것으로전망 아시아-태평양시장과기타세계시장 (Rest of World) 에서는 2015년에서 2020년사이휴먼모션시뮬레이션이각각연평균 11.73%, 11.24% 씩증가할것으로전망 스포츠분야의휴먼모션시뮬레이션시장은 2014년북미와유럽의비중이매우크고 2015년부터 2020년까지연평균 11.")
258 기술개발테마현황분석 Entertainment and Leisure Robots * 출처 : IFR, Executive Summary World Robotics 2017 Service Robots [ 엔터테인먼트및레저로봇세계시장현황및전망 ] 세계모션시뮬레이션시장규모 (Automotive, Defense, Entertainment, Healthcare, Mining, R&D, Sports, and Textile 모두포함 ) 는 2015 년 억달러에서연평균 6.97% 씩증가해 2020 년에 억달러에도달할것으로전망 (MarketsandMarkets, ) * 출처 : Press Releases, Investor Relation Presentations, Annual Reports, Expert Interviews, and MarketsandMarkets Analysis [ 모션시뮬레이션세계시장현황및전망 ] 모션시뮬레이션시장점유율은북미가가장많은 56% 의점유율을보이고있고 (2014년), 이는 2015년에서 2020년사이연평균 5.50% 씩증가할것으로전망 아시아-태평양시장과기타세계시장 (Rest of World) 에서는 2015년에서 2020년사이휴먼모션시뮬레이션이각각연평균 11.73%, 11.24% 씩증가할것으로전망 스포츠분야의휴먼모션시뮬레이션시장은 2014년북미와유럽의비중이매우크고 2015년부터 2020년까지연평균 11.79% 와 11.84% 증가할것으로전망되나, 아시아태평양지역과나머지지역에서 13.4% 와 14% 로더높은성장률을보일것으로전망 250
259 스포츠시뮬레이터로봇 [ 스포츠분야휴먼모션시뮬레이션세계시장규모및전망 ] ( 단위 : 백만달러, %) 지역구분 CAGR North America Europe Asia-Pacific Rest of the World Total * 출처 : Press Releases, Investor Relation Presentations, Annual Reports, Expert Interviews, and MarketsandMarkets Analysis 가상시뮬레이션시장에서가장큰비중을차지하고있는항공시뮬레이터와밀리터리시뮬레이터시장은고비용, 고위험의훈련을안전하고경제적이며효과적으로대체할수있다는장점으로인해고속성장중 세계항공시뮬레이터시장은 2016년 61.8억달러에서 2021년 75.4억달러로연평균 4.1% 씩증가할전망 (MarketsandMarkets, ) 밀리터리시뮬레이션과가상훈련시장은 2016년 133억달러에서 2026년 177억달러로연평균 2.9% 씩증가할전망 (Strategic Defence Intelligence, ) 항공시뮬레이터는전체밀리터리시뮬레이션시장의 59% 를차지해 78.5억달러일것으로예측 밀리터리시뮬레이션시장은북미에서 36.4% 를차지해가장많은점유율을보이며, 그이후유럽과아시아-태평양시장이각각 25.4%, 25.2% 를차지 가상현실시장과콘텐츠시장은국방, 제조, 미디어, 교육, 스포츠등의다양한분야로확대되고있어스포츠산업과관련한스포츠시뮬레이터로봇실감재현콘텐츠, 상호작용, 응용서비스기술시장도빠르게성장할것으로전망 가상현실세계시장은 2016년 22억달러에서 2025년 800억달러규모로성장전망 (Goldman Sachs, 2016) IDC는가상현실세계시장규모를 2016년 33억달러에서 2020년 848억달러로성장할것으로전망 (IDC, 2016) Digi-Capital은가상현실과증강현실세계시장이 2016년 50억달러에서 202년 1,500억달러로급격히성장할것으로전망 (Digi-Capital, 2016) 세계가상현실게임소프트웨어시장은 2015년 12.6억달러에서 2020년 36.2억달러로연평균 23.6% 증가할전망 (Transparency Market Research) 세계디지털콘텐츠시장은가상현실과증강현실시장규모를합하여 2014년 963억달러에서 2020년 1,540억달러규모로성장할것으로전망 ( 소프트웨어정책연구소, 2015) 251
260 기술개발테마현황분석 세계스포츠산업규모는 2015년기준 1조 5,000억달러 ( 약 1,713조원 ) 로추정되고있음 ( 문화체육관광부, 2015 스포츠산업백서 ) 국가별로스포츠산업의범위의차이가있지만, 미국의스포츠산업규모는 2015년기준으로 4,984억달러 ( 약 569조원 ) 로추정 영국이 2012년기준 389억파운드 ( 약 54조원 ), 독일이 2010년기준 774억유로 ( 약 96조원 ) 로추정 중국이 2014년기준 1.36조위안 ( 약 221조원 ), 일본이 2012년기준 11조 4천억엔 ( 약 125조원 ) 으로추정 252
261 스포츠시뮬레이터로봇 (2) 국내시장 국내스포츠시뮬레이터로봇시장규모는 2016년기준 208.1억원으로추산되며, 연평균성장률은 12.3% 로국내시장의고성장을유지하여 2021년에는 368.2억원규모의시장으로성장할것으로예상 국내스크린스포츠시장규모는 2013년 1.5조원, 2014년 2.5조원수준을형성하고있고, 2017년에는 5조원규모로추정 ( 문화체육관광부 ) 되나, 스크린스포츠시장규모의약 80% 인절대적인비중을스크린골프시장이차지 스포츠시뮬레이터로봇시장규모현황과전망에서는골프시뮬레이터와같은모션플랫폼이없는스크린스포츠시장은제외하고예측함 [ 스포츠시뮬레이터로봇분야의국내시장규모및전망 ] ( 단위 : 억원, %) 구분 CAGR 국내시장 * 출처 : MarketsandMarkets(2015) Service Robotics Market - Analysis & Forecast to 2020, MarketsandMarkets(2015) Motion Simulation Market Forecast to 2020, Frost&Sullivan(2016) Global Outlook for the Healthcare Industry, KEIT PD Issue Report ( ), 디지털콘텐츠산업분석자료, Transparency Market Research 자료로추정계상 국내모션플랫폼시장도국방시뮬레이터와항공시뮬레이터중심으로시장이형성되고있으나스포츠시뮬레이터에대한수요도점차증가할것으로전망 국내서비스로봇시장규모는 2015년 1.51억달러 (1,782억원 ) 에서연평균 17.92% 증가율을보이며 2020년에는 3.45억달러 (4,071억원 ) 로성장예상 (MarketsandMarkets, ) 2015년기준로봇산업실태조사보고서에따르면전문서비스로봇과개인서비스로봇을포함한전체서비스로봇의국내시장규모는 2014년 4,624억원에서 2015년 5,885억원으로 21.4% 성장한반면개인서비스로봇은 2014년 3,247억원에서 2015년 3,256억원으로 0.3% 성장에머무름 ( 로봇산업실태조사, ) 국내가상훈련시스템시장규모는 2013년 2,753억원, 2015년 2,939억원규모에서 2022년 4,133억원으로확대될것으로전망 (KEIT PD Issue Report, ) 국내가상현실및콘텐츠시장은몰입형가상현실을중심으로저변을확대할것으로예상되며킬러앱이될수있는스포츠콘텐츠에대한수요도증가할것으로전망 2016년피트니스웨어러블기기출하량이약 9천만대에달하고, 2017년국내스포츠콘텐츠시장은약 5조원으로성장할것으로전망 ( 과학기술정보통신부 ) 국내시뮬레이션기반콘텐츠시장은 2015년 3,621억원규모에서 2017년 4,752억원규모로증가할것으로전망 ( 디지털콘텐츠산업실태조사, ) 253
262 기술개발테마현황분석 [ 가상현실하드웨어및콘텐츠국내시장규모및전망 ] ( 단위 : 억원, %) 구분 CAGR 하드웨어 8,805 12,678 18,225 26,286 37,848 54, 콘텐츠 831 1,057 1,346 1,713 2,180 2, 합계 9,636 13,735 19,601 27,999 40,028 57, * 출처 : 한국VR 산업협회, 스포츠산업실태조사결과에의하면, 국내스포츠산업규모는매출액기준 2015년 65조 1,450억원으로 2014년 63조 1,490억원과비교할때 3.16% 증가하였으며, 국내총생산 (GDP) 대비 4.16% 를차지하는것으로추정 ( 문화체육관광부 ) 新분류기준의스포츠산업을영위하는사업체는전년대비 1,057개늘어난 93,350개로추정되고, 스포츠산업종사자수는 38만 3천명으로 2014년대비 1만여명이늘어난것으로나타남 舊분류기준으로 2015년매출액은 42조 9,110억원으로집계되었으며, 2015년스포츠산업을영위하는사업체는전년대비 4,861개가늘어난 7만 6,001개로추정 문화체육관광부스포츠산업기술기반조성사업 R&D 지원금액은 2013년 15개과제 69억원, 2014년 24개과제 81억원, 2015년 25개과제 85억원규모임 스포츠산업의중요성에비해스포츠산업의연구개발에대한직접적인지원은 2015년기준전체연구개발사업 (54,442개) 대비 0.046%(25개 ) 로매우부족한실정 (2015 스포츠산업백서 ) 254
263 스포츠시뮬레이터로봇 (3) 무역현황 스포츠시뮬레이터로봇또는스포츠시뮬레이터라는품목으로수출입통계가집계되지않아무역현황을분석하는데한계가있어수출품목중골프시뮬레이터가포함되는품목 (HSK ) 의무역현황을살펴보았으며, 수출량에비하여수입량이증가하는추세임 수출현황은 12년 1,023.1만달러에서 16년 1,075.1만달러수준으로소폭증가하였으며, 수입현황은 12년 438.1만달러에서 16년 973.3만달러수준으로증가하여무역수지흑자폭이감소 최근 5년 ( 12~ 16년) 간연평균성장률을살펴보면수출금액은 1.25% 로증가하고수입금액은 22.09% 로증가한것으로나타남 무역특화지수는 12년(0.40) 부터 16년(0.05) 까지감소한것으로나타나수출특화상태가약화되고있으며국내기업의수출량도감소되고있는것으로나타났으며, 국내의골프시뮬레이터제품의해외시장진출이정체되고있는것으로분석 새로운실감스포츠시뮬레이터기술의개발을통해新시장을개척하고스포츠산업과타산업의융복합을통한사업영역의확장이필요함 [ 스포츠시뮬레이터로봇관련무역현황 ] ( 단위 : 천달러, %) 구분 CAGR 수출금액 10,231 10,651 10,311 10,035 10, 수입금액 4,381 4,992 7,057 7,989 9, 무역수지 5,850 5,659 3,254 2,046 1, 무역특화지수 * * 무역특화지수 = ( 상품의총수출액 - 총수입액 )/( 총수출액 + 총수입액 ) 으로산출되며, 지수가 0 인경우비교우위는중간정도이며, 1 이면완전수출특화상태를말함. 지수가 -1 이면완전수입특화상태로수출물량이전혀없을뿐만아니라수입만한다는뜻 * 출처 : 관세청수출입무역통계 HS-Code(6 자리기준 ) 활용 255
264 기술개발테마현황분석 다. 기술환경분석 (1) 기술개발트렌드 연구개발동향 실제스포츠움직임에가까운실감구현 최신 ICT 기술과의접목및다양한산업과의연계 사용자인터랙션강화및맞춤형서비스제공 단순한움직임과반응력을시뮬레이션하는모션플랫폼에서모션의정밀도를높이기위해다자유도방식과전기식액추에이터기반의모션플랫폼확대 고출력, 부드러운움직임, 일정압력유지용이, 단전에대한안전등의장점을가진하이드롤릭기반모션플랫폼은고가의초기설치비용과오일누수등환경문제와유지보수비용문제로인한단점으로인해시장정체 전기식액추에이터방식은에너지효율성이좋고유지보수비용과인프라구축비용이상대적으로저렴하고소프트웨어기반의제어가용이하기때문에시장이확대되고있으며, 갑작스런전원공급중단에대한대응과고장에대한안전보장기술적용필요 단축또는 2~3축의움직임을표현하는모션플랫폼에서정밀한모션의제어가가능한 6자유도모션플랫폼이주력으로개발되고있으며, 실감자유도를표현하기위한더많은자유도를가지는스포츠시뮬레이터로봇에대한기술개발도진행 스포츠종목별특화된모션플랫폼을적용하거나공통플랫폼을이용하여다양한스포츠종목을커버하기위한기술개발노력 사이클, 승마, 요트, 스키, 스노보드, 봅슬레이등과패러글라이딩, 레이싱, 산악바이크와같은익스트림스포츠의각스포츠종목에적합한스포츠시뮬레이터모션플랫폼개발 범용의다자유도모션플랫폼을베이스로하고교환식스포츠기구부모듈을교체하여다수의스포츠종목을하나의공통플랫폼을이용하여확장가능 좁은공간에서전후좌우로이동할수있도록하는옴니트레드밀이나버툭스옴니, 앉기, 엎드리기, 점프동작까지가능한버추얼라이저와같은가상공간이동용모션플랫폼이개발되면서이에적합한스포츠종목에적용예상 스포츠시뮬레이터로봇모션플랫폼과실감스포츠콘텐츠의접목뿐만아니라몰입환경을극대화하기위한다양한실감효과를재현하기위한장치와신기술도입 사용자의스포츠환경몰입도향상을위한스포츠콘텐츠의고실감표현노력과모션플랫폼과의자연스러운피드백연동을통한실감효과극대화 균형, 경사, 속도등의각종운동감각표현과시각, 청각, 후각, 촉각, 평형감각등의오감제시를위한실감환경효과발생장치의통합전장부와오감효과생성시스템기술개발 256
265 스포츠시뮬레이터로봇 가상현실, 증강현실, 인공지능, 빅데이터, 사물인터넷, 스마트웨어기술등최신 ICT 기술을적용하여새로운시장창출가능 가상현실, 증강현실기술의개화로이를적용한스포츠시뮬레이터로봇시스템의개발필요. 이러한기술을활용한시뮬레이터제어와인터랙션이중요한화두로거론 저발열, 저전력, 초소형모바일컴퓨팅기술의발전과근접통신기술과각종센서기술의발달로웨어러블장치기술과의접목시도를통한신시장창출 가상현실플랫폼주도권확보를위한글로벌기업들의가상현실플랫폼생태계확대 가상현실시장을새롭게연오큘러스는 PC기반의고품질가상현실플랫폼으로강력한영향력을발휘하고있고, 소니는안정적인독자게임생태계를보유를기반으로플레이스테이션 VR을출시 PC기반의페이스북 ( 오큘러스 ) 과 HTC를비롯하여, 모바일기반의삼성전자와 LG전자등이가상현실디바이스경쟁과더불어실감형콘텐츠개발에박차 페이스북, 구글, HTC 등주요기업들은자사의기기에서개발한콘텐츠를구동할수있는서비스플랫폼개발병행 방대한인터넷트래픽요구에따라유선인터넷, 이동통신, 방송망까지새로운네트워크고도화에대비 스포츠관련가상현실기술개발은아직스크린스포츠수준에머물러있고가상현실디바이스에적용할스포츠콘텐츠도부족하지만가능성은무궁무진 스포츠시뮬레이터로봇분야에서도사용자중심및사용자친화적인제품이나서비스가시장을주도할것으로예상되며이와관련한사용자인터랙션기술의강화 인간의다양한감각을자유롭게이용하려는욕구가커지면서기존의기계에인간을맞추려는시스템에서기계를인간에맞추려는기술및제품개발로의변화시도 터치가아닌다른방식의인터랙션인터페이스의필요성이높아지면서동작인식기술에주목받고있고, 주로영상인식 / 분석기술에기반하고있으나다른형태로구현될가능성도제기 스포츠시뮬레이터로봇환경에서사용자맞춤형운동관리와맞춤형트레이닝등의스포츠응용서비스기술제공을통한활성화기대 웨어러블기기를이용하여칼로리소모량, 운동시간, 운동거리, 걸음횟수등의운동량을측정하거나실시간음성코치를지원하는개인러닝트레이닝시스템출시 스포츠시뮬레이터로봇환경에서사용자신원, 성별, 연령, 위치, 행동및감성상태등복합적인상황정보를인지하여개별맞춤형서비스를제공하는기술개발진행 257
266 기술개발테마현황분석 (2) 기술환경분석 주요정부부처에서는대학및연구기관이보유한첨단연구장비를공동활용할수있도록지원하는연구장비공동활용지원서비스를운영 중소벤처기업부산하중소기업기술정보진흥원을통해대학및연구기관이보유한연구장비를소프트웨어의중소기업공동활용을지원하여국가장비활용도제고와중소기업기술경쟁력향상을도모 과학기술정보통신부국가연구시설장비진흥센터는기반구축형연구장비의효율적운영체계마련을목적으로장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원에서는산업기술개발장비공동이용시스템인산업기술개발장비시스템 e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 한국전자통신연구원의지능형로봇테스트베드에서는로봇시험장비및시험인프라구축, 로봇시험평가방법개발및시험인증체계구축, 지능형로봇시험지원서비스제공 한국전자통신연구원지능형로봇테스트베드는로봇기업의요구사항수렴및시험방법도출을기반으로시험측정장비및시험인프라구축, 공용테스트베드및시험장비활용지원과사용법기술지도, 로봇환경에서의통신 /SW 컴포넌트 /HRI 성능평가항목및방법개발, 공공서비스로봇의시험인증평가체계구축등의서비스제공 보유인프라 : 테스트베드전용의광네트워크, 무선통신인프라구축, 로봇환경에서의통신안정성및신뢰성성능평가를위한환경, HRI(Human Robot Interaction) 성능측정환경, 공공용서비스로봇의품질평가를위한시험환경구축 국민체육진흥공단한국스포츠개발원에서는스포츠산업현장수요에부응하는최신동향및 정보를제공하고, 선진스포츠시장및기업의전략을공유하며, 스포츠산업의잠재가능성 발굴및인식의저변확대를위한다양한사업을수행 스포츠산업기술연구개발지원사업을통해스포츠와기술을접목한고부가가치스포츠용품기술개발및중소기업경쟁력강화를위한기술개발지원 지역융 복합스포츠산업기반확충사업을통해 ICT융복합스포츠산업육성을통한지역의신성장동력창출과새로운일자리창출을위한스포츠산업융 복합지역거점센터를운영하고, 스포츠자원과타산업의융복합으로콘텐츠개발및사업화를통한지역경제및스포츠산업활성화도모 정부부처간협력을통해스포츠와가상현실기술의융복합과체험관구축, 평창올림픽계기로글로벌확산을위한정책지원 문화체육관광부는경제를살리는스포츠의일환으로스포츠산업의잠재력을가시화하는정책을시행하고, 융복합을통한선진국모방형에서신시장선도형구조로전환하기위해 ICT 기술을접목한스포츠활동정보앱 기기개발과가상스포츠시뮬레이터개발지원 258
267 스포츠시뮬레이터로봇 과학기술정보통신부는로봇기술과가상현실기술을결합한스포츠콘텐츠산업의발전을위해 ICT융합스포츠콘텐츠개발지원사업을시행하고 ICT융합스포츠체험관설치 산업통상자원부는성장가능성이높은산업분야를선정하여정부지원을집중하기위해지능형로봇, 착용형스마트기기, 실감형콘텐츠, 가사훈련시스템등이포함된 19대미래성장동력분야발굴 [ 19 대미래성장동력 ] 주력산업미래신산업공공복지 에너지산업기반산업 스마트자동차 심해저해양플랜트 5G 이동통신 고기능무인기 지능형로봇 착용형스마트기기 실감형콘텐츠 스마트바이오생산시스템 가상훈련시스템 맞춤형웰니스케어 신재생에너지 하이브리드시스템 재난안전관리스마트시스템 직류송배전시스템 초임계CO2 발전시스템 융복합소재 지능형반도체 지능형사물인터넷 빅데이터 첨단소재가공시스템 * 출처 : 산업통상자원부 스포츠융합및가상현실콘텐츠의안전한이용환경과개발자네트워킹을강화하고법과제도적기술뒷받침을위한방안마련 가상현실콘텐츠이용가이드라인과가상현실콘텐츠의안전성확보및품질향상을위한가상현실콘텐츠제작절차등을마련하고, 가상훈련놀이기구및스포츠시뮬레이터등을포함한가상현실콘텐츠소비에따른인체영향과관련된정책연구추진 스포츠산업및가상현실산업협회등을통한기업간네트워킹강화하고, 기반기술, 표준, 특허, 기술동향등을논의할수있는기술교류의장을지원 과학기술정보통신부와문화체육관광부공동으로콘텐츠민관합동협의회및이슈별관계부처가참여하는협력창구구축을추진하고, 소비자안전등을위해발생가능한위험요인에대한안전성검사제도개선검토 259
268 기술개발테마현황분석 3. 기업분석 가. 주요기업비교 모션시뮬레이션플랫폼은하이드롤릭기반보다는액추에이터기반모션시뮬레이션의비중이훨씬크고, 앞으로도액추에이터기반이주력으로예상되며, 북미와유럽중심에서아시아태평양지역으로시장이확대되고있음 Bosch Rexroth, CAE(Canadian Aviation Electronics), Dassault Systems, Exponent, Human Solutions, Moog, SantosHuman, Siemens, Thoroughbred Technologies 등의업체가세계시장을주도하고있음 모션시뮬레이션플랫폼은국방및항공시뮬레이터모션플랫폼과가상훈련시스템을주력으로하고있지만엔터테인먼트, 헬스케어, 스포츠등다양한분야로확장되고있음 Infinadeck, Virtuix, Cyberith 등의업체에서좁은공간에서전방향으로이동가능한가상공간이동장비를출시함에따라이를기반으로하는다양한스포츠시뮬레이터로봇시스템의출현예상 스크린골프시뮬레이터의대중화에따라스크린야구, 스크린축구등다양한스포츠종목을대상으로하는스크린스포츠시장형성 스크린골프는 1990년대초미국, 독일, 일본등에서시뮬레이션기술을적용하면서시작되었지만, 1990년대후반부터 IT기술이접목되면서주목을받음 골프존을비롯한국내기업들이세계시장의점유율을높여가고있으며, 미국의 Aboutgolf, Fullswing 등이경쟁하고있음 최근에는야구, 축구, 농구, 하키, 테니스, 승마, 사격, 양궁등다양한종목으로스크린스포츠시뮬레이터가출시되고있으며업체간의선점경쟁점화 스포츠시뮬레이터를개발하는전문중소기업중심의시장형성과익스트림스포츠시뮬레이터개발경쟁 승마시뮬레이터는영국 Racewood사에서관련지적재산권을확보하고승마훈련에적합한다양한시뮬레이터제품군을출시하며시장을형성하였으나, 최근에는국내의승마시뮬레이터전문업체들이앞선기술력을바탕으로시장경쟁 소수매니아층만체험할수있던패러글라이딩, 레이싱, 산악바이크등의익스트림스포츠에대한수요증가로가상현실기반으로한익스트림스포츠시뮬레이터기술개발진행 실감스포츠콘텐츠, 스포츠인터랙션, 스포츠교육및평가등스포츠시뮬레이터로봇시장의활성화를위한관련기술개발필요 스포츠콘텐츠개발은 Unity와 Unreal이주로사용되고있으며, 국내업체의기반기술수준은취약한반면콘텐츠제작은글로벌기술경쟁력을보유 구글, 페이스북, 애플, 삼성, 소니등세계선진기업을중심으로실감콘텐츠공급을위한유통및서비스인프라구축과생태계플랫폼경쟁확대 260
269 스포츠시뮬레이터로봇 스포츠인터랙션, 스포츠교육및평가관련분야도산학연협력을통한기술개발과중소기업의 참여확대방안마련등을통해시장활성화필요 [ 제품분류별주요기업 ] 구분 경쟁환경 기술분류모션플랫폼실감콘텐츠인터랙션교육 / 평가관련용품 / 장비 주요품목및기술 모션베이스, 액추에이터, 센서, 제어, 조작, 구동및이동장치, 운동부하조정, 기구학 / 동역학해석 / 검증, 시뮬레이션시각화 실감 / 가상 / 증강콘텐츠, 렌더링, 프로젝션, 물리엔진, 저작도구, 리얼타임엔진, 실감재현장치, 오감효과생성, 콘텐츠제작, 실감소프트웨어 스포츠 / 사용자영상 / 음성인식, 신원 / 감성 / 자세 / 위치 / 상황인식, 센서정보융합, 운동감각표현, 맞춤형서비스, 상호작용인터페이스 생체정보측정처리, 운동기능학습, 스포츠활동모니터링, 스포츠 DB, 코칭소프트웨어, 데이터분석, 체력관리, 스포츠도구평가 / 검증 가상 / 증강현실장치, 웨어러블기기, 센서장치, 디스플레이, 데이터기록장비, 유무선통신, 스포츠환경정보수집및인식 해외기업 Bosch, Festo, CAE, Moog, Siemens, Cruden, Gilderfluke, XSimulator, Racewood, Cyculus, Infinadeck, Virtuix, Cyberith Matterport, Jaunt, EA, Crytek, Unity, Epic Games, Focaltron, AboutGolf, Nvidia, Trinigy Visual Sports, PowerAlley Interactive, GestureTek, Google, Apple, Microsoft, Intel, Viewdle, NeuroSky IBM, SAP, Sensatex, Sports motion, Omron, Polar, Nike, Adidas, RedLake, Codamotion, Nielsen Sports Microsoft, Apple, Richo, Facebook, HTC, Sony, Nokia, Gopro, InvenSense, Intel, Xsens, CyberGlove, Triax, K-vest 국내기업 모션디바이스, 피엔아이시스템, 도담시스템즈, 이노시뮬레이션, 기마로보, SM 로보틱스, 유도스타자동화, 시뮬라인, 썬에어로시스 CJ CGV, KT, 골프존, 알바트로스, 엑스골프, 라우드, 매크로그래프, 베레스트 스포츠코드코리아, 비솔, 일리시스, 다트피쉬코리아, 삼성전자, 보이스웨어, 셀바스에이아이 인바디, 비트컴퓨터, 유비케어, 모션테크놀로지, 스페이스일루젼, 에스씨미디어 삼성전자, LG 전자, 엠씨넥스, 한국미디어테크, LG 유플러스, SKT, 피코스넷, 세영정보통신, 이공이비피엠 261
270 기술개발테마현황분석 국내중소기업사례 그록스톤은과속경고속도표시장치및속도감지용레이더센서, 스크린연습장용피칭머신등을제조판매하고있으며, 피칭머신은단순직구가아닌다양한변화구와속도조절이가능하고미국 JUGS SPORTS사에공급예정 밸런스파크는사격, 야구, 축구등의스포츠체험이가능하며, 로봇을이용한승마체험, 건강관리및진단서비스를함께제공 에이티디랩은적녹조현상감시, 해상구조용장시간무인수직이착륙드론, VR 게임과영화를위한시뮬레이터개발등의로봇과로봇관련시스템을개발하고있으며최근 6축로봇의문제점을극복한 3축형승마로봇을개발 지오아이티는 IoT를접목한헬스바이크인 Z-바이크를개발하여집에서도퍼스널트레이닝효과를극대화하면서운동이가능하도록하였고, 개인용스마트기기를연결해사용가능한특징을가지며, 최근중국시장에도진출하였음 [ 주요중소기업비교 ] ( 단위 : 백만원,%) 국내업체자산총계매출액 매출액증가율 영업이익율당기순이익율 R&D 집중도 그록스톤 ( 주 ) 에이티디랩 지오아이티 1,281 1,
271 스포츠시뮬레이터로봇 나. 주요업체별기술개발동향 (1) 해외업체동향 모션플랫폼은국방, 산업용에서스포츠, 엔터테인먼트분야로확대되고있으며, 단순한움직임과반응력을모사하는플랫폼에서모션의자유도와정밀도를높이고가상현실기술과의접목을통해사실감을증가하는방향으로기술개발 Bosch Rexroth는전기구동방식의 3자유도및 6자유도모션플랫폼을출시, 캐빈시뮬레이션과비행시뮬레이션등에적용 Cruden은모터스포츠용시뮬레이터인 Hexatech 개발하였으며, 병렬형스튜어트플랫폼을이용하여 6자유도를구현하고스티어링피드백시스템적용 Gilderfluke는작지만효율성이높은 6축공압방식모션플랫폼을출시하였으며, 지면으로부터 60cm 이하로작고가볍고움직임도빠르며충분한구동력을발휘 Skytec Interative는스노보드와스키시뮬레이터인 The Real Alpine-Carving Training Machines 개발하였고, 대형슬라이딩시스템과대형화면을사용해실감콘텐츠를제공 Racewood는 Dressage Simulator, The Ridemaster, The Riding Simulator, Walk & Trotting Simulator, Cantering Simulator 등의다양한승마시뮬레이터제품을판매 공압구동장치를이용한보트시뮬레이터인 VSail Trainer를호주에서개발하였고, 다양한실제코스와바람상태의콘텐츠를제공하며, 돛과방향키를조작함으로서조종가능 VR 바이크시뮬레이터 Cyculus는바퀴는없고페달만있는데, 오큘러스 HMD를머리에쓰고 3D로만든가상의산악지형을달리는실제같은경험을전달 Infinadeck의옴니트레드밀은전후좌우로걸을수있도록만든장치로좁은공간에서실제처럼이동할수있으며, 유사가상공간이동장비로 Virtuix의 Omni, Cyberith의 Virtualizer 등이있음 가상현실시뮬레이션용품, 센서장치, 데이터기록장비와웨어러블기기는미국과유럽이시장을리드하고있으며, 가상, 증강, 실감기술이부상하면서관련기술개발도활발 가상현실구현디바이스와관련하여 Facebook은 Oculus Rift 상용버전출시, Google은 Magic Leap에투자하고 VR플랫폼 DayDream 발표, Sony는 PS4용 PSVR 발표, Microsoft는홀로렌즈개발자버전을공급하고윈도우10에서홀로렌즈지원예정 Ricoh에서는실시간 360도영상스티칭이가능한저가형카메라출시, Nokia, Gopro 등에서는전문가용고품질의카메라출시로실사 VR 콘텐츠제작접근성향상중 Xsens는관성센서를이용한모션캡처솔루션 MVN을개발. 카메라없이모션캡처가가능하며, 모션캡처데이터를기록하고분석하기위한 MVN Studio 소프트웨어제공 CyberGlove Systems는데이터글로브제품군을제공하고, 손을이용한역감장치, 실시간충돌감지, 진동, 충격, 펄스등의피드백효과를제공하는 VirtualHand SDK 개발 Microsoft의 Kinect는별도의게임컨트롤러없이 Xbox를제어하고상호작용가능하게하는장치로, 카메라모듈이장착되어모션캡처로사용자의동작을인식 263
272 기술개발테마현황분석 Triax Technologies의 SIM(Smart Impact Monitor) 센서는헤드밴드나스컬캡에내장할수있는웨어러블센서로스포츠선수의머리에가해지는충격의강도와빈도를기록할수있음 미국 K-vest에서는무선모션측정센서가내장된조끼형태의착용형시스템 K-vest, K-trainer, K-health 개발, 트레이너및물리치료사가사용자의모션을정량적으로관찰하고이를토대로피드백을제공하도록함 실감스포츠콘텐츠, 실감렌더링, 실시간콘텐츠환경을위한리얼타임엔진에대한기술개발이지속적으로이루어지고있고, 컴퓨터그래픽이나 3D 영상처리기술등이접목되고있으며, 개발플랫폼으로는 Unity와 Unreal이폭넓게활용됨 Matterport는 3D 센서를탑재한카메라를판매하고, 이장비로촬영한 360도사진이나영상을가상현실장치나 PC에서재현하는소프트웨어제공 Jaunt는실시간으로실사가상현실콘텐츠를제작하는회사로, 가상현실촬영을위한카메라로영화와같은수준높은콘텐츠제작을목표로함 EA의 Frostbite 엔진은모던워페어의게임에서극사실렌더링엔진으로, 광원효과및대량의데이터최적화에따라단순게임의비주얼을넘어서영화에사용할수있는수준에도달 Crytek의 CryEngine은 Frostbite 엔진과대등한기술로평가받는기술로, 외부의광원효과및자연물에처리에강점이있음 Epic Games는게임엔진인 Unreal 4를공개하였는데, 모바일게임에서부터블록버스터급콘솔과가상현실에이르기까지자연스러운움직임및외형을구현 스포츠시뮬레이터모듈과사용자와의상호작용을위해필요한사용자검출, 신원인식, 감성인식, 다중센서융합, 복합상황인식, 자세인식등의연구개발이진행되고있으며, 고속카메라를이용한스포츠영상분석기술도주목받고있음 ETH Zurich는거리센서정보와영상데이터를결합한사람검출및추적시스템을개발. 그래프기반방법으로데이터를클러스터링하고영상특징을이용해사람을검출하고추적 Japan Science Technology는연구용로봇을제작하고음원방향인식기능을탑재하여마이크배열을통해들어온소리를이용하여사용자를추적 Visual Sports는고속머신비전카메라 MicroSight를이용하여매초 2,000장의사진을분석해회전체의정확한궤적, 방향및속도를계산 PowerAlley Interactive는사용자가던진야구공의속도와방향을인식하여볼, 스트라이크, 히트를판정하고실제메이저리그의타석모습을비디오로디스플레이해사실감을높임 MIT AI Lab에서는 Oxygen 프로젝트를통해모바일장치및카메라, 마이크, 디스플레이, 스피커, 레이더등을이용하여사람의움직임과행동을검출및인식하는연구를수행 264
273 스포츠시뮬레이터로봇 스포츠교육및평가와관련하여신체신호측정, 인체동작인식, 운동기능학습관련장치와분석기술이다수출시되고있으며, 빅데이터기반스포츠분석솔루션도주목받는기술임 IBM은 Watson의스포츠분야진출을위해 Triax Technologies, Spare5, 113 Industries사와전략적제휴를발표. 운동선수의역량을높이거나팬들의경험을재정의하는데활용 Sensatex의 SmartShirt와 VivoMetrics의 VivoChampion 등은라이프셔츠기술로생체역학적인인체의움직임과생리적신호를측정하고분석하여시각화하고모니터링하여사용자의상태체크 미국의 Sports motion은촬영영상으로부터모션의각도, 거리, 속도등을측정하고이를선수동영상등의데이터베이스와비교하는코칭소프트웨어 Pro-trainer motion analysis software 개발 Omron은세계최초의탁구코치로봇을개발하여 2014년부터탁구코치로봇을선보이고있으며, 2016년 CEATEC JAPAN에서인공지능을탑재한 3세대모델 Forpheus를전시 SAP 등은스포츠분야의빅데이터분석솔루션개발에적극나서고있음. SAP는인메모리데이터베이스 HANA를이용하여스포츠데이터의빠른처리에활용 265
274 기술개발테마현황분석 (2) 국내업체동향 국내시뮬레이터모션플랫폼은고가의외산개발도구나시스템에대한의존도가높은편이며, 항공기, 차량, 국방등의연구용시뮬레이터들이주를이루고있지만, 일부기업에서스포츠시뮬레이션을위한모션플랫폼개발이이루어지고있음 국내시뮬레이터업체들은입체영화관용 4D 모션시뮬레이터를제품화하였고, 전후좌우움직임과뒤틀림을제공하고진동, 바람, 향기효과연출도가능 자전거, 승마등의스포츠에서단순반복적인모션에의존한기구에단조로움을극복하고엔터테인먼트요소를가미한시뮬레이터제품이개발되고있음 승마시뮬레이터는기마로보의 ELMA, 홍진레포츠의 HHRS승마, SM로보틱스의탑홀스, 유성의웰마, 인퍼니의다크호스, 대원포티스등에서제품출시 요트시뮬레이터는모션플랫폼을기반으로딩기요트를체험할수있는시뮬레이터로유도스타자동화등에서개발 스노보드시뮬레이터는실제보드처럼생긴발판위에올라탄뒤가상현실 HMD를이용하여설원을체험할수있도록하는장치로한국플라잉피쉬등에서개발 바이크시뮬레이터, 레이싱시뮬레이터, 스카이어트랙션등과같은익스트림스포츠를경험할수있는시뮬레이터도지오아이티, 모션디바이스, 피엔아이시스템등에서개발 국방, 자동차, 철도등의가상훈련을위한모션플랫폼을도담시스템즈, 이노시뮬레이션등의업체에서개발중 국내에서도가상현실시뮬레이션용품및웨어러블기기등과관련하여기술개발에참여하고있으나미국이나유럽의선진기업에비해기술격차가큰편임 삼성전자와 LG전자의 HMD와기반디스플레이기술이글로벌시장경쟁력을확보하고있으므로, 디스플레이및 HMD 등을중심으로국내우수한디바이스기술력과강소소프트웨어및솔루션기업간협업을통해글로벌경쟁력확보필요 생체신호를이용하여사람의감정상태, 스트레스, 주의집중도, 심신안정도, 정신적작업량등의정신적상태를측정하고조절하는데도움이되는웨어러블디바이스개발진행중 가상현실산업육성을위해정부에서는 2018년평창동계올림픽종목가상체험을위한 VR 게임콘텐츠제작지원및체험관구축진행 실감콘텐츠, 실감렌더링, 리얼타임엔진등의기반기술력은취약하고핵심저작도구의해외의존도는높으나, 글로벌수준의콘텐츠개발과 ICT 제조경쟁력을보유하고있으며, 또한스크린골프시장은대중화되었고, 스크린야구등의타종목스크린스포츠시장도형성되고있음 국내문화와한류콘텐츠는세계적으로각광받고있으나, 스포츠융합서비스콘텐츠는아직부족하므로, 문화, 한류와가상현실기술을결합한다양한콘텐츠개발시도 266
275 스포츠시뮬레이터로봇 3D와증강현실저작도구기술을보유하고있으나범용적활용은미미한수준으로자체저작도구이용 VR제작역량이취약한반면, 부분적으로 Unity와 Unreal 플러그인형태의기술력보유 MWC 2016 행사에서는 KT의 VR 스키점프와봅슬레이등동계올림픽을활용한가상현실콘텐츠를선보여주목을받음 골프공의초기속도, 탄도각, 방향을측정하고, 가상현실기술을접목한스크린골프시뮬레이션시스템을골프존, 알바트로스, 엑스골프등에서개발하여대중화시킴 스포츠시뮬레이터로봇인터랙션은사용자의몰입도를높이고자연스러운상호작용을위해필요한기술로부각되고있으며, 국내의여러연구기관에서기반기술에대한연구진행 한국전자통신연구원에서는사용자의복합적인상황정보를인지하여사용자맞춤형서비스를제공하고스포츠시뮬레이터환경에최적화된인식기술을제공하는스포츠시뮬레이터사용자맞춤형서비스용단위인식기술을개발 한국과학기술연구원은감성중심의상호작용을위한로봇플랫폼을개발하고, 터치와음성으로부터지각정보와상황정보를융합하여감정을표현하는기능을개발 서울대학교는다중감각통합기능과감정 / 정서 / 인지활동연구, 다양한감각정보들이통합되는양상과그에따른상호작용의발생등인간행동과관련된다양한분야에걸쳐연구진행 한국과학기술원은인간-로봇상호작용핵심연구센터를통해로봇의감성인지및표현과인터랙션에관련된다수의연구수행 신체신호측정, 인체동작인식, 운동기능학습관련장치와분석등을포함하여스포츠교육및평가와관련한기술개발도진행 다양한센서를사용하여개인의체력, 나이등의생체정보, 환경정보와같은사용자상황정보를수집하여인식하고운동효과를분석하는시스템개발이진행됨 모션테크놀로지의 Visual3D 소프트웨어는측정한데이터를이용하여 3차원동작분석을수행하는소프트웨어로정확한운동학과동역학분석을요구하는 3차원생체역학적동작분석가능 스페이스일루젼의모션캡쳐소프트웨어는연기자의복잡한동작을모션캡처하면서데이터화를최소화해정밀도를높여주는소프트웨어를개발 267
276 기술개발테마현황분석 4. 기술개발현황 가. 기술개발이슈 실제스포츠움직임에가까운실감구현 단순한움직임과반응력을시뮬레이션하는모션플랫폼에서모션의정밀도를높이기위해다자유도방식과전기식액추에이터기반의모션플랫폼으로확대 고출력, 부드러운움직임, 일정압력유지용이, 단전에대한안전등의장점을가진하이드롤릭기반모션플랫폼은고가의초기설치비용, 오일누유및유출등의환경문제, 유지보수비용문제로인한단점으로인해시장정체 전기식액추에이터방식은에너지효율성이좋고유지보수비용과인프라구축비용이상대적으로저렴하고소프트웨어기반의제어가용이하기때문에시장이확대되고있으며, 갑작스런전원공급중단에대한대응과고장에대한안전보장기술적용필요 단축또는 2~3축의움직임을표현하는모션플랫폼에서정밀한모션의제어가가능한 6자유도모션플랫폼이주력으로개발되고있으며, 실감자유도를표현하기위한더많은자유도를가지는스포츠시뮬레이터로봇이나새로운유형의모션플랫폼에대한기술개발도진행 스포츠종목별특화된모션플랫폼을적용하거나공통플랫폼을이용하여다양한스포츠종목을커버하기위한기술개발노력 사이클, 승마, 요트, 스키, 스노보드, 봅슬레이등과패러글라이딩, 레이싱, 산악바이크와같은익스트림스포츠의각스포츠종목에적합한스포츠시뮬레이터모션플랫폼개발 범용의다자유도모션플랫폼을베이스로하고교환식스포츠기구부모듈을교체하여다수의스포츠종목을하나의공통플랫폼을이용하여확장가능한방식의기술개발 좁은공간에서전후좌우로이동할수있도록하는옴니트레드밀과버툭스옴니, 앉기, 엎드리기, 점프동작까지가능한버추얼라이저와같은가상공간이동용모션플랫폼이개발되면서이에적합한스포츠종목에적용예상 스포츠시뮬레이터로봇모션플랫폼과실감스포츠콘텐츠의접목뿐만아니라몰입환경을극대화하기위한다양한실감효과를재현하기위한장치와신기술도입 사용자의스포츠환경몰입도향상을위한스포츠콘텐츠의고실감표현노력과모션플랫폼과의자연스러운피드백연동을통한실감효과극대화 균형, 경사, 속도등의각종운동감각표현과시각, 청각, 후각, 촉각, 평형감각등의오감제시를위한실감환경효과발생장치의통합전장부와오감효과생성시스템기술개발 다축스포츠시뮬레이터의개발 가상현실, 증강현실기술을적용한스포츠시뮬레이터로봇시스템의개발및상용화가활발하며, 이를활용한시뮬레이터제어와인터랙션이중요한화두로거론 268
 을자극하여사용자에게보다실감적인체감을줄수있는다축스포츠시뮬레이터를적용한로봇이활용됨 - 균형, 경사, 속도등의각종운동감각표현과오감제시를위한실감환경효과발생장치의통합전장부와오감효과생성시스템기술개발 - 평형감각반영용능동형다축운동플랫폼, 촉각용인터랙션모듈기술 ( 고삐,")
277 스포츠시뮬레이터로봇 - 기존제품들의단순한모션기구부, 저실감형가상현실시스템및전문콘텐츠부족으로인한한계성을극복하기위하여오감융합형스포츠시뮬레이터개발이활발 - 코리아 VR 페스티벌, 대한민국 ICT 융합엑스포, 평창동계올림픽기념 ICT 올림픽체험관등에서 AR VR과탑승형스포츠시뮬레이터로봇을결합한어트랙션을통해운동기구, 놀이기구및동계스포츠를체험할수있는체험관을운영한바있음 오감 ( 시각, 청각, 후각, 촉각, 평형감각 ) 을자극하여사용자에게보다실감적인체감을줄수있는다축스포츠시뮬레이터를적용한로봇이활용됨 - 균형, 경사, 속도등의각종운동감각표현과오감제시를위한실감환경효과발생장치의통합전장부와오감효과생성시스템기술개발 - 평형감각반영용능동형다축운동플랫폼, 촉각용인터랙션모듈기술 ( 고삐, 방향키, 돛, 액체분사등 ), 시각적효과를위한고실감형 VR 영상 / 전문콘텐츠기술, 가상비주얼콘텐츠반응형후각 / 청각용효과발생장치등의기술및장비활용 - 일례로 한국해사기술에서개발한 어반슬로프 는슬로프상에서의스키의위치나에징 (edging) 각도등을추적하는여러개의동작추적센서, 최첨단소프트웨어를탑재한파노라마스크린화면, 고출력모터내장형모션플랫폼등을결합한스키시뮬레이터를선보임 교환형플랫폼구조통한사업모델구상 - 종목별운동모션범위및속도스펙을분석하여, 공통플랫폼을활용하고모듈은교환식으로다양한스포츠체험에적용할수있는스포츠시뮬레이터공통융합기술 - 다양한종목의즉각연동시스템이가능하고오감실감형표현을통해실제와같은몰입감을제공하며, 사용자의자세및의도를파악하고국가대표급선수들의 db를활용하여스포츠코칭에도활용될수있음 * 출처 : 과학기술정보통신부, ' 다축모션플랫폼을기반으로한범용오감융합형스포츠시뮬레이터개발 ' [ 스포츠시뮬레이터에활용되는교환형플랫폼구조 ] 269
278 기술개발테마현황분석 신 ICT 기술과의접목및다양한산업과의연계 가상현실, 증강현실, 인공지능, 빅데이터, 사물인터넷, 스마트웨어기술등최신 ICT 기술을적용하여새로운시장창출가능 가상현실, 증강현실기술의개화로이를적용한스포츠시뮬레이터로봇시스템의개발필요. 이러한기술을활용한시뮬레이터제어와인터랙션이중요한화두로거론 저발열, 저전력, 초소형모바일컴퓨팅기술의발전과근접통신기술과각종센서기술의발달로웨어러블장치기술과의접목시도를통한신시장창출 가상현실플랫폼주도권확보를위한글로벌기업들의가상현실플랫폼생태계확대 가상현실시장을새롭게연오큘러스는 PC기반의고품질가상현실플랫폼으로강력한영향력을발휘하고있고, 소니는안정적인독자게임생태계를보유를기반으로플레이스테이션 VR을출시 PC기반의페이스북 ( 오큘러스 ) 과 HTC를비롯하여, 모바일기반의삼성전자와 LG전자등이가상현실디바이스경쟁과더불어실감형콘텐츠개발에박차 스포츠관련가상현실기술개발은아직스크린스포츠수준에머물러있고가상현실디바이스에적용할스포츠콘텐츠도부족하지만가능성은무궁무진 사용자인터랙션강화및맞춤형서비스제공 스포츠시뮬레이터로봇분야에서도사용자중심및사용자친화적인제품이나서비스가시장을주도할것으로예상되며이와관련한사용자인터랙션기술의강화 인간의다양한감각을자유롭게이용하려는욕구가커지면서기존의기계에인간을맞추려는시스템에서기계를인간에맞추려는기술및제품개발로의변화시도 터치가아닌다른방식의인터랙션인터페이스의필요성이높아지면서모션인식기술에주목하고있고, 주로영상인식 / 분석기술에기반하고있으나다른형태로구현될가능성도제기 스포츠시뮬레이터로봇환경에서사용자맞춤형운동관리와맞춤형트레이닝등의스포츠응용서비스기술제공을통한활성화기대 웨어러블기기를이용하여칼로리소모량, 운동시간, 운동거리, 걸음횟수등의운동량을측정하거나실시간음성코치를지원하는개인러닝트레이닝시스템출시 스포츠시뮬레이터로봇환경에서사용자신원, 성별, 연령, 위치, 행동및감성상태등복합적인상황정보를인지하여개별맞춤형서비스를제공하는기술개발진행 270
279 스포츠시뮬레이터로봇 나. 특허동향분석 스포츠시뮬레이터로봇특허상주요기술 주요기술 스포츠시뮬레이터로봇과관련된기술은실감재현스포츠시뮬레이터플랫폼, 실감재현스포트시뮬레이터응용서비스, 스포츠환경정보수집기술이있으며, 실감재현스포츠시뮬레이터응용서비스에대한기술은운동효과측정 / 평가및코칭프로그램기술, 실감재현콘텐츠기술로구분되며, 스포츠환경정보수집에대한기술은환경구축및인식기술, 운동장비구성품배치기술로구분됨 분류요소기술설명 실감재현스포츠시뮬레이터플랫폼 모션플랫폼 플랫폼해석및제어 시뮬레이터콘텐츠및상황인식기술 다종목, 다축 (X, Y, Z,... 축 ) 제어실시간모션구동장치및스포츠종목별교환식모듈및운동기센서입력장치 스포트운동좌표계분석, 기구학해석, 동역할해석검증기술및시뮬레이션시각화, 동역학기반시뮬레이션제어기술 사용자신원 / 위치 / 행동및감성상태등의복합적상황인지기반인간 - 스포츠모듈상호작용 (HSI) 기술및비젼 / 햅틱등의센서정보융합과각종운동감각 ( 균형, 경사, 속도등 ) 표현을위한오감 ( 시각 / 청각 / 후각 / 촉각 / 평형감각 ) 제시기술 실감재현스포츠시뮬레이터응용서비스 스포츠환경정보수집 운동효과측정 / 평가및코칭프로그램기술 실감재현콘텐츠 환경구축및인식기술 사용자별 3D 운동효과측정 / 평가및전문코칭프로그램개발기술 스포츠시뮬레이터용실감재현장치, 실감랜더링기술및실감콘텐츠표현, 동역학피드백이펙트구현기술 실시간고정밀위치인식및유무선통신기술. 스포츠재현로봇의 2D/3D 주변환경구축및인식기술 운동장비구성품배치기술스포츠재현로봇의운동장비구성품배치기술 271
280 기술개발테마현황분석 세부분야별특허동향 주요기술별국가별특허동향 스포츠시뮬레이터로봇에대한요소기술별주요국가별특허정보데이터입수하였으며, 최근 10 년간의특허데이터를비교분석함 분류요소기술한국미국일본유럽계 실감재현스포츠시뮬레이터플랫폼 모션플랫폼기술 플랫폼해석및제어기술 시뮬레이터콘텐츠및상황인식기술 실감재현스포츠시뮬레이터응용서비스 스포츠환경정보수집 운동효과측정 / 평가및코칭프로그램기술 실감재현콘텐츠기술 환경구축및인식기술 운동장비구성품배치기술 합계 ,833 국가별요소기술별특허동향에서는플랫폼해석및제어기술이다른기술들에비해특허출원건수가가장많았으며, 그다음으로는운동장비구성품배치기술, 환경구축및인식기술이특허출원건수가많았음 플랫폼해석및제어기술은미국이가장많은출원량을보유하고있으며, 일본이상대적으로적은출원량을보유하고있음. 이외에다른모든요소기술에서도미국이가장많은출원량을보유하고있고일본이상대적으로적은출원량을보유하고있음 이에따라, 스포츠시뮬레이터로봇에대한기술은미국에서가장활발한연구가이루어지고있음을알수있음 272
281 스포츠시뮬레이터로봇 주요기술별출원인동향 세부분야 요소기술 기술집중도 주요출원인 국내특허동향 모션플랫폼 NIKE SEGA GAMES NINTENDO 한국전자통신연구원 중소기업및대학교 BANDAI NAMCO 실감재현스포츠시뮬레이터플랫폼 플랫폼해석및제어 ENTERTAINMENT Impulse Technology NIKE 전북대학교산학협력단 연세대학교산학협력단 NIKE 시뮬레이터콘텐츠및상황인식기술 Virtual Training The Group Sports DIRECTV 전북대학교산학협력단 연세대학교산학협력단 한국전자통신연구원 NIKE 한국기술교육대학교 실감재현스포츠시뮬레이터응용서비스 운동효과측정 / 평가및코칭프로그램기술 실감재현콘텐츠 Christopher Cody Thompson KONAMI I m p u l s e Technology NIKE Jerome Hubert Wei 조선대학교 한국전자통신연구원 중소기업 다림비전 한국전자통신연구원 스포츠환경정보수집 환경구축및인식기술 운동장비구성품배치기술 NIKE IGT I-Race NIKE IGT Sega 연세대학교 한국전자통신연구원 연세대학교 전북대학교 : 400 건이상, : 300~399 건, : 200~299 건, : 100~199 건, : 100 건미만 실감재현스포츠시뮬레이터플랫폼주요출원인동향 모션플랫폼기술에서는 NIKE가가장많은특허를보유하고있으며, 플랫폼해석및제어기술에서는 BANDAI NAMCO, 시뮬레이터콘텐츠및상황인식기술에서는 NIKE가가장많은특허를보유하고있음 국내에서는대학교, 공공연구기관및중소기업을중심으로모션플랫폼기술, 플랫폼해석및제어기술, 시뮬레이터콘텐츠및상황인식기술에대한연구개발이이루어지고있음 273
282 기술개발테마현황분석 실감재현스포츠시뮬레이터응용서비스분야주요출원인동향 운동효과측정 / 평가및코칭프로그램기술에서는 NIKE가가장많은특허를보유하고있으며, 실감재현콘텐츠기술은 Impulse Technology가가장많은특허를보유하고있음 국내에서는대학교, 공공연구기관및중소기업을중심으로운동효과측정 / 평가및코칭프로그램기술, 실감재현콘텐츠기술에대한연구개발이이루어지고있음 스포츠환경정보수집분야주요출원인동향 환경구축및인식기술, 운동장비구성품배치기술은 NIKE가가장많은특허를보유하고있으며, 국내에서는대학교, 공공연구기관을중심으로환경구축및인식기술, 운동장비구성품배치기술에대한연구개발이이루어지고있음 스포츠시뮬레이터로봇분야의주요경쟁기술및공백기술 스포츠시뮬레이터로봇분야의주요경쟁기술은플랫폼해석및제어, 환경구축및인식, 운동장비구성품배치기술로나타남 스포츠시뮬레이터로봇분야에서플랫폼해석및제어, 환경구축및인식, 운동장비구성품배치기술이가장치열한분야이고, 운동효과측정 / 평가및코칭프로그램기술, 실감재현콘텐츠기술분야는아직까지출원이활발하지않은공백기술분야로나타남세부분야요소기술기술집중도 실감재현스포츠시뮬레이터플랫폼 모션플랫폼 플랫폼해석및제어 시뮬레이터콘텐츠및상황인식기술 실감재현스포츠시뮬레이터응용서비스 운동효과측정 / 평가및코칭프로그램기술 실감재현콘텐츠 스포츠환경정보수집 환경구축및인식기술 운동장비구성품배치기술 : 400 건이상, : 300~399 건, : 200~299 건, : 100~199 건, : 100 건미만 274
283 스포츠시뮬레이터로봇 최신국내특허기술동향 분류요소기술최근핵심요소기술동향 모션플랫폼 사용자의이동에따른가속도를측정하고, 사용자의시야 방향을감지하는기술 실감재현스포츠시뮬레이터플랫폼 플랫폼해석및제어 시뮬레이터콘텐츠및상황인식기술 실시간주변환경을분석하고, 사용자의조작에따른조작값을검출및운동방정식을통한동역학해석기술 실제운동과유사한근육운동을할수있도록제어기술 사용자의생체신호를획득하고분석하는기술 가상의시뮬레이터의데이터를바탕으로센서를이용하여사용자의위치에모션을발생하는기술 실감재현스포츠시뮬레이터응용서비스 운동효과측정 / 평가및코칭프로그램기술 실감재현콘텐츠 사용자의자세를촬영하고, 분석하여코칭정보를영상또는음성으로출력하는기술 사용자의생체신호를획득하고분석하여적합한훈련을제공하는기술 실제와유사한근육사용, 에너지소모및힘을느끼도록하는기술 실제와유사한속도, 가속도및중력을느끼도록하는기술 스포츠환경정보수집 환경구축및인식기술 영상을이용하여 특 장점을 추출하여 위치나 자세를 인식하는기술 IoT 단말을통해특정공간내의인물, 사물및환경등의 데이터를획득하는기술 운동장비구성품배치기술 공간을활용및이용편의를위한구조및구성기술 최근국내에출원되는특허를통해기술동향을살펴보면, 스포츠시뮬레이터로봇에대한요소기술대부분은대학교, 공공연구기관중심으로연구개발이이루어지고있는것으로나타남 운동효과측정 / 평가및코칭프로그램기술에서는사용자의자세를촬영하고, 분석하여코칭정보를영상또는음성으로출력, 사용자의생체신호를획득하고분석하여적합한훈련을제공기술이개발되고있는것으로나타남 실감재현콘텐츠기술에서는실제와유사한근육사용, 에너지소모및힘을느끼도록하는기술, 실제와유사한속도, 가속도및중력을느끼도록하는기술이개발되고있는것으로나타남 275
284 기술개발테마현황분석 중소기업특허전략수립방향및시사점 스포츠시뮬레이터로봇분야의공백기술분야는운동효과측정 / 평가및코칭프로그램기술, 실감재현콘텐츠기술로나타남 스포츠와 IT가결합하면서, 다양한스포츠시뮬레이터로봇이출시되고있으며, 최근 VR과센서등을통해실제와같은느낌을주기위한스포츠시뮬레이터로봇에대한연구가진행되고있음 해외에서는기업이스포츠시뮬레이터로봇을제조하여판매하고있으나, 국내에서는대학교, 공공연구기관에서연구를진행하고있고, 일부중소벤처기업이참여하고있는분야임 운동효과측정 / 평가및코칭프로그램기술, 실감재현콘텐츠기술은공백기술로나타났지만, 특허를확보하기위한전략이필요할것으로판단됨 향후중소기업은공백기술분야이면서대학교, 공공연구기관에서활발히연구개발을하고있는기술을이전받거나공동연구개발을진행하여제품화하는방향을우선적으로고려해볼수있을것으로사료됨 276
285 스포츠시뮬레이터로봇 5. 연구개발네트워크 가. 연구개발기관 / 자원 연구개발기관 스포츠시뮬레이터로봇분야주요연구개발기관 한국전자통신연구원 ( 소장한동원 ) - ETRI에서사람의모션을데이터베이스 (DB) 화하여실시간학습할수있는스마트웨어기술개발에성공 - 사람의신체주요관절에부착한 17개의센서를통해얻은데이터값으로관절의각도나 3차원위치좌표를알수있으며, 이는스마트웨어기술로 ETRI가개발한옷을입거나밴드를붙이면어려운운동의동작이나척추자세교정, 재활치료등움직이는동작을따라하는데유용할것임 - 본연구에 SOT(System on Textile) 기반지능형인터랙티브섬유기술과다채널센싱네트워킹기술적용 - ETRI에서실감미디어메타데이터재현을위한엔진기술을개발하고, 실감효과적응형엔진기술 로서국제표준화기구 (ISO/IEC) 에서국제표준으로승인됨 - 사용자의복합적인상황정보를인지하여사용자맞춤형서비스를제공하고스포츠시뮬레이터환경에최적화된인식기술을제공하는스포츠시뮬레이터사용자맞춤형서비스용단위인식기술개발 전자부품연구원 ( 원장박청원 ) - 입체적이고실감적인영상구현을위한곡면형무안경인터랙티브 3D(i3D) 공간디스플레이기술과 3D 공간감지및비접촉식촉감인터페이스기술로게임, 가상훈련등에서실감및몰입체험이가능하도록하는핵심기술개발 - 국립부산과학관과 모터보트시뮬레이터 상설전시를통해조종면허훈련, 안전운항교육, 단순오락용등다양한가상현실체험 훈련이가능하게함 한국로봇융합연구원 ( 원장박철휴 ) - 특수목적서비스로봇, 로보테인먼트핵심요소기술개발 - 가상현실 / 증강현실과결합한모션플랫폼, 콘텐츠상호작용실감전달기술개발 - 승마로봇, 사용자상호작용형모션플랫폼개발 밸런스파크 - 승마, 레이싱등다양한스포츠시뮬레이터로봇서비스를실시중이며, 국내최초로메디컬, 스포츠, 엔터테인먼트를합작해메디스포테인먼트 (Medi-Sportainment) 를구축 티디엘 ( 대표김유신 ) - 동계스포츠인봅슬레이를가상공간에서체험할수있는 ' 실감형봅슬레이시뮬레이터 ' 를개발 KT - MWC 2016에서 VR 스키점프와봅슬레이등동계올림픽을활용한가상현실콘텐츠를선보임 277
286 기술개발테마현황분석 연구개발자원 국가연구개발지원사업 중소벤처기업부 - 중소기업기술혁신사업 - 상용화기술개발사업 ( 구매조건부등 ) - 융복합기술개발사업 - 산학연협력기술개발사업 - 제품서비스기술개발사업 - 중소기업 R&D 역량제고사업 - 제품 공정개선기술개발사업 - 맞춤형기술파트너지원사업 - 산연전용과제 : 우수 R&D 인프라를활용한대표적인중소기업지원연구기관으로연구부서와중소기업간연계를통한기술지원은물론변리사, 산학연협력코디네이터, 기술거래사, 기술가치평가사등기술사업화관련전담인력이사업화사안마다관여해고품질비즈니스컨설팅제공 산업통상자원부 - 에너지 자원기술개발사업 - 전략핵심소재기술개발사업 - 신재생에너지기술개발사업 - 산업융합원천기술개발사업 - 로봇미래전략 (2013~2022) - 산업엔진프로젝트 (19대미래성장동력 ) - 사업화연계기술개발사업 ( 민간투자연계형등 ) 차세대스마트러닝산업지원센터구축사업 로봇산업정책협의회 - 창의적 도전적로봇연구촉진을위한풀뿌리지원프로그램 국민체육진흥공단한국스포츠개발원 - 스포츠산업기술연구개발지원사업 - 지역융 복합스포츠산업기반확충사업 한국로봇산업진흥원 - 로봇산업클러스터 : 센터와장비를구축하고, 기술사업화촉진및로봇창업맞춤형지원과상용화기술개발지원을통해의료, 사회안전, 제조분야의로봇산업육성을목표로함 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 278
287 스포츠시뮬레이터로봇 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등맞춤형기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원 ) - e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 279
288 기술개발테마현황분석 나. 연구개발인력 스포츠시뮬레이터로봇분야는한국전자통신연구원, 전자부품연구원에서주로연구개발을 진행하고있음 정부는개방형로봇산업생태계조성을위해인력양성측면에서多기술영역업무수행및 다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형 로봇전문인력양성추진 [ 스포츠시뮬레이터로봇분야주요연구조직현황 ] 기관한국전자통신연구원전자부품연구원고려대학교가톨릭대학교조선대학교티디엘 280
289 스포츠시뮬레이터로봇 다. 기술이전가능기술 (1) 기술이전가능기관 스포츠시뮬레이터로봇의요소기술은크게시뮬레이터콘텐츠및상황인식기술, 버추얼코칭프로그램기술, 스포츠시뮬레이터용실감재현장치기술, 실감렌더링및몰입환경용프로젝션기술, 환경구축및인식기술의총다섯개의분류로구분됨 기술이전이가능한기관은한국전자통신연구원, 전자부품연구원, 고려대학교, 가톨릭대학교, 가 있음 [ 스포츠시뮬레이터로봇요소기술연구조직 ] 분류요소기술기관 시뮬레이터콘텐츠및상황인식기술 실전과같은훈련이가능한 360 도전방향이동장치기반가상훈련시스템원천기술 360 도영상및모션장치기반몰입형인터랙티브콘텐츠체험기술 한국전자통신연구원 한국전자통신연구원 버추얼코칭프로그램기술 스포츠시뮬레이터용실감재현장치기술실감렌더링및몰입환경용프로젝션기술 환경구축및인식기술 가상현실기반의골프학습장치, 그방법및그기록매체 승마자의 3 차원모션분석기반실시간코칭시스템 인터랙티브모션플랫폼용다수사용자실감인터랙션기술 인터랙티브 UI 기반 3D 시스템기술 가상공간과현실공간을연계한로봇게임시스템및로봇게임방법 스포츠시뮬레이터사용자맞춤형서비스용단위인식기술 고려대학교조선대학교한국전자통신연구원전자부품연구원가톨릭대학교한국전자통신연구원 281
290 기술개발테마현황분석 (2) 이전기술에대한세부내용 분류 기술명 세부내용 360 도영상및모션장치기반몰입형인터랙티브콘텐츠체험기술 기술이전목적및필요성 모션플랫폼환경에서자세센서와위치센서를기반으로사용자의자세를정확하게파악하여 360도인터랙티브실감콘텐츠에반영하는기술 몰입형 HMD를이용하여사용자의위치, 방향에맞는인터랙티브실감영상을제공함으로써가상의여행체험을제공해주는기술 기계적인모션장치를이용하고있는사용자가콘텐츠와자연스럽게인터랙션할수있는실감인터랙션기술이부족한실정임 모션플랫폼의자연스러운움직임과주변환경의시각및청각적감각을상호연동하는콘텐츠기술이급속하게요구되고있음 연구개발결과물로서산출된 "360도영상및모션장치기반몰입형인터랙티브콘텐츠체험기술 " 을콘텐츠관련업체에이전하여기술확산을도모하고상용화를통해관련시장의창출과확대를목적으로함 기술활용방안및기대성과 인터랙티브체험형모션플랫폼환경에직접적으로반영할예정이며, 4D 극장, 체험형박물관등다양한체험형콘텐츠인터랙션기술에활용될수있음 국내 / 외모션플랫폼환경에서인터랙션기술을상용화한적이없으며, 추후개발된기술의상용화를통해시장과기술을선점하는효과가예상됨 인터랙티브콘텐츠기술을통하여다양한체험형실감인터랙션콘텐츠생산에기여할수있을것임 패러글라이딩교육장, 동호회등에서실제야외패러글라이딩이전에실내, 지상훈련을위한효과적인몰입형시뮬레이터 다양한인터랙티브콘텐츠를이용하면, 안전하고체계적인교육이가능함 남녀노소일반인들이실내에서쉽게접할수있는익스트림스포츠 4D 체험관 공간, 시간적제약요소때문에접하기힘들었던스포츠에대한접근성증대와흥미유발 지자체 ( 시청, 구청, 도청등 ) 에서관내주요시설, 관광지, 랜드마크, 절경등을한눈에하늘에서내려다볼수있는공공서비스 1차원적인관광홍보에서나아가주요아이템을실제로탐험하는듯한경험을제공함으로써실질적인홍보효과의증강 세부문의 기술관련 한국전자통신연구원 282
291 스포츠시뮬레이터로봇 분류 기술명 세부내용 가상현실기반의골프학습장치, 그방법및그기록매체 기술이전목적및필요성 본발명은소정의골프스윙동작을모션캡쳐하여 3 차원동작데이터를 생성하고, 동작데이터를랜더링하여영상정보를재생하고대응하는설명을 포함함 기술활용방안및기대성과 본발명은소정의골프스윙동작을모션캡쳐하여생성한 3차원동작데이터및상기골프스윙동작에대한설명데이터를저장하는데이터베이스부, 상기 3차원동작데이터를상기데이터베이스부로부터독출하고, 상기독출된 3차원동작데이터를랜더링하여버추얼휴먼에의한연속적인골프스윙영상정보를생성하는랜더링부, 상기버추얼휴먼의신체부위들중어느하나의신체부위를선택하기위한제1인터페이스를이용하여상기골프스윙영상정보의재생중에상기골프스윙영상정보의시점이상기신체부위를추종하도록상기랜더링부를제어하는스윙포인트제어부, 상기골프스윙영상정보를시각적으로재생하는애니메이션부및상기설명데이터를상기데이터베이스부로부터독출하여상기골프스윙영상정보에대응하는설명을디스플레이하는정보표시부를포함함 본발명에의하면, 스윙동작중일시정지나멈춤을통해각단계별동작을관찰가능하게하고, 여러각도에서관찰한스윙동작과신체각부위별스윙동작을제공할수있으며, 사용자의스윙동작과전문골퍼의스윙동작을비교할수있는수단을통해골프스윙동작에대한학습효과를향상시킬수있음 기술관련 세부문의 고려대학교 계약관련 283
292 기술개발테마현황분석 분류 기술명 세부내용 인터랙티브모션플랫폼용다수사용자실감인터랙션기술 기술이전목적및필요성 인터랙티브모션플랫폼용다수사용자실감인터랙션기술은움직임이심한상용모션플랫폼환경에서다수의모션인식센서를기반으로다수의사용자의의도를정확하게파악하여인터랙티브실감콘텐츠에반영하는기술임 해당기술은인터랙티브콘텐츠와실시간으로상호작용을할수있으며, 움직임이심하고조명이어두운환경에서도사용자의의도를정확하게파악할수있는기술임 모션플랫폼의인터랙티브콘텐츠부족으로사용자가급감하고있지만, 움직임이심한모션플랫폼환경에서콘텐츠와자유롭게인터랙션할수있는실감인터랙션기술이부족함실정임 움직임이심하고조명이어두운상용모션플랫폼환경에서인터랙티브콘텐츠와실감나게인터랙션할수있는기술을제공할것임 연구개발결과물로써산출된인터랙티브모션플랫폼용다수사용자실감인터랙션기술을모션플랫폼상용업체에이전하여실용화기술을보급하고상품성을향상하여기술의보급에목적을둠 기술활용방안및기대성과 인터랙티브체험형모션플랫폼환경에직접적으로반영하예정이며, 4D 극장, 체험형박물관등다양한체험형콘텐츠인터랙션기술에활용될수있음 국내 / 외모션플랫폼환경에서인터랙션기술을상용화한적이없으며, 추후개발된기술의상용화를통해시장과기술을선점하는효과가예상됨 인터랙티브콘텐츠기술을통하여다양한체험형실감인터랙션콘텐츠생산에기여할수있을것임 기술관련 세부문의 한국전자통신연구원 계약관련 284
293 스포츠시뮬레이터로봇 분류 기술명 기술이전목적및필요성 세부내용 스포츠시뮬레이터사용자맞춤형서비스용단위인식기술 본기술은사용자맞춤형서비스를위한사용자의신원, 성별및연령대를인식하고, 스포츠시뮬레이터사용자의의도와자세를인식하는기능을제공하는기술임 실환경에서사용자의복합적인상황정보를인지하여사용자맞춤형서비스를제공하고스포츠시뮬레이터환경에최적화된인식기술을제공하고자함 정형화된환경이아닌조명, 배경, 해상도, 사용자의포즈등의다양한환경변화에도안정적인인식률을제공하는사용자인식기술이필요함 많은수의사용자를식별하기위해서는대용량의데이터베이스에대해서도안정적인인식성능의제공이필요함 사용자의성별과연령대를포함한상황정보를인지하여사용자개별맞춤형운동관리와맞춤형트레이닝서비스의제공이필요함 스포츠시뮬레이터환경에서사용자의부조음을인식하여사용자와스포츠시뮬레이터간의상호작용이가능하도록할필요가있음 스포츠시뮬레이터상의사용자의자세를분석하여코칭하고사용자스스로자세를교정할수있도록스포츠자세에대한인식기능이필요함 기술활용방안및기대성과 조명, 포즈, 배경등의변화에도강인한인식성능제공, 대용량데이터베이스에서도안정된인식성능제공, 사용자맞춤형서비스를위한단위인식기술의선택적적용가능, 사용자맞춤형서비스및스포츠시뮬레이터응용분야에최적화 실환경에서의사용자인식기반서비스, 사용자성별및연령대별맞춤형서비스, 사용자개별맞춤형운동관리, 스포츠자세교정및자가코칭, 부조음인식및가상트레이닝, 스포츠시뮬레이터응용서비스전반에적용가능함 기술관련 세부문의 한국전자통신연구원 계약관련 285
294 기술개발테마현황분석 분류 기술명 인터랙티브 UI 기반 3D 시스템기술 세부내용 기술이전목적및필요성 무안경식입체영상기반에서신체의움직임을인지하여 3D 콘텐츠와상호 인터랙션하고, 영상객체조작시공간촉감기능을제공하여몰입연계체험이 가능한新정보가전시스템기술 기술활용방안및기대성과 직관적이고조작이쉬워현실감과흥미를느끼고, 디지털기기에서아날로그감성을느낄수있어서 Consumer 산업으로진입이용이 실감형 Interactive 3D e-shopping 또는 3D 원격교육 / 화상회의등다양한응용기술도출및다양한응용서비스확산으로저탄소녹색성장을이끄는 Green by IT 의효과가기대 3D 안경을착용하지않는인터랙티브 3D 시스템 실감몰입형무안경 3D 디스플레이시스템 3차원공간의손제스처, 몸동작등을인식할수있는센싱칩 인터랙티브 3D 콘텐츠와시스템이연동할수있는미들웨어 S/W 접촉하지않고손에자극을줄수있는비접촉식자극인터페이스 세부문의 기술및계약관련 전자부품연구원 전자부품연구원기업협력플랫폼 286
![스포츠시뮬레이터로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 스포츠시뮬레이터로봇분야키워드클러스터링 ] [ 스포츠시뮬레이터로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1.](/docs-images/93/112329278/images/295-1.jpg "Simulation based upon medical data offers a fast and robust method for the prediction of fracture risk 클러스터 01 accurate simulation 4~6 2.")
295 스포츠시뮬레이터로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 스포츠시뮬레이터로봇분야키워드클러스터링 ] [ 스포츠시뮬레이터로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1. Simulation based upon medical data offers a fast and robust method for the prediction of fracture risk 클러스터 01 accurate simulation 4~6 2. System and method for tracking and assessing movement skills in multidimensional space 3. Virtual sport system using start sensor for accurate simulation of movement of a ball 287
296 기술개발테마현황분석 No 주요키워드연관도수치관련특허 / 논문제목 1. Handheld versus mobile data acquisitions for spatial analysis of 클러스터 02 handheld device 2~4 natural turfgrass sports fields 2. Efficient interactive visualization of crowd scenes on mobile devices 3. Handheld device workout coach system 1. SWING ANALYSIS SYSTEM 클러스터 03 sporting environment 3~4 2. HYDROPLANE SPORTING ENVIRONMENT AND DEVICES AND METHODS THEREFOR 3. Electronic tracking system with heads up display 1. Third person view and guidance for more natural motor 클러스터 04 virtual environment 6~7 behaviour in immersive basketball playing 2. Research on the virtual reality training simulation technology based on key technology of physical simulation 3. Electrode material, electrode, and battery 1. MULTI-AXIAL INDUSTRIAL ROBOT 클러스터 05 virtual competition 7~8 2. Electric spot welding head for a multi-axis industrial robot with a casing and supporting structure ; Robot comprising this head 3. VIRTUAL ENVIRONMENTS FOR MANAGING AND INTERACTING WITH VIRTUAL SPORTS LEAGUES 1. Computer simulation of lower extremities movement during stair 클러스터 06 fitness monitoring 3~5 climbing 2. Movement variability and skills monitoring in sports 3. Fitness Monitoring Methods, Systems, And Program Products, and Applications Thereof 1. The potential of the Microsoft Kinect in sports analysis and 클러스터 07 electronic tracking 4~5 biomechanics 2. Learning to track and identify players from broadcast sports videos 3. Electronic Sports Tracking and Coaching System 288
297 스포츠시뮬레이터로봇 No 주요키워드연관도수치관련특허 / 논문제목 클러스터 08 exercise device 3~5 1. On the interaction design of game bike 2. Oscillating exercise device for shoulder and core strengthening 3. Exercise device 1. Rider posture analysis for postural correction on a sports simulator 클러스터 09 realistic movement 4~7 2. METHOD AND SYSTEM FOR SIMULATIONS OF DYNAMIC MOTION AND POSITION 3. System and method for tracking and assessing movement skills in multidimensional space 1. Human body tracking system application in gymnastics rhythmic player technical movement rotating posture analysis 클러스터 10 platform assembly 5~6 2. Design and implementation of visual simulation system of sports training 3. Universal support platform for exercise bicycles and exercise system with virtual reality synchronicity 289
298 기술개발테마현황분석 (2) 요소기술도출 산업 시장분석, 기술 ( 특허 ) 분석, 전문가의견, 중소기업기술수요를바탕으로로드맵기획을 위한요소기술도출 [ 스포츠시뮬레이터로봇분야요소기술도출 ] 분류요소기술출처 모션플랫폼 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 실감재현스포츠시뮬레이터플랫폼 플랫폼해석및제어시뮬레이터콘텐츠및상황인식기술다자유도실감모션플랫폼기술서브모션제어기술운동효과측정 / 평가및코칭프로그램기술 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 실감재현스포츠시뮬레이터응용서비스 스포츠환경정보수집 실감콘텐츠및피드백이펙트구현기술스포츠시뮬레이터실감재현장치기술실시간고정밀위치인식및유무선통신기술버추얼코칭프로그램기술환경구축및인식기술운동장비구성품배치기술사용자모션인식및분석기술스포츠모션버추얼코칭기술상황인지기반사용자인터페이스 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천 전문가추천, 특허 / 논문클러스터링 290
299 스포츠시뮬레이터로봇 (3) 핵심요소기술선정 확정된요소기술을대상으로중소기업에적합한핵심요소기술선정 [ 스포츠시뮬레이터로봇분야핵심요소기술 ] 분류핵심요소기술개요 실감재현스포츠시뮬레이터플랫폼 다자유도실감모션플랫폼기술 서보모션제어기술 스포츠모션구현을위한메커니즘과다자유도모션생성을지원하는모션플랫폼기구부개발 스포츠시뮬레이터로봇모션플랫폼용액추에이터개발과사용자안정성을기반으로하는서보모션의제어및모션제어기동기화기술 실감재현스포츠콘텐츠 스포츠시뮬레이터실감재현장치기술 실감콘텐츠및피드백이펙트구현기술 실감환경효과발생장치의통합전장부와오감효과생성시스템을개발하는기술 오감몰입도향상을위한실감콘텐츠의표현과동역학피드백이펙트를구현하는기술 사용자모션인식기술 비전또는하이브리드센서기반으로사용자의운동자세를검출하고인식하는기술 스포츠인터렉션 스포츠모션버추얼코칭기술 스포츠종목별인체학습용데이터를기반으로사용자의스포츠모션을분석하고버추얼코칭하는기술 상황인지기반사용자인터페이스 복합상황인지를기반으로사용자와의상호작용을통해스포츠참여몰입도를향상시키는기술 291
300 기술개발테마현황분석 나. 스포츠시뮬레이터로봇기술로드맵 최종중소기업기술로드맵은기술 / 시장니즈, 연차별개발계획, 최종목표등을제시함으로써 중소기업의기술개발방향성을제시 292
301 스포츠시뮬레이터로봇 다. 연구개발목표설정 핵심요소기술별최종목표는아래와같이기술요구사항과연차별개발목표로제시함 [ 스포츠시뮬레이터로봇분야핵심요소기술연구목표 ] 분류핵심요소기술기술요구사항 연차별개발목표 1 차년도 2 차년도 3 차년도 최종목표 모션플랫폼개발 다자유도실감모션플랫폼기술 실감모션구현정확도 70% 80% 90% 실감구현을위한다자유도및능동형모션구현 서보모션제어기술 모션동기제어속도 10ms 5ms 2ms 모션플랫폼안정성향상 스포츠시뮬레이터실감재현장치기술 실감재현몰입도 70% 80% 90% 실감재현몰입도극대화 실감재현콘텐츠 실감콘텐츠및피드백이펙트구현기술 피드백응답특성 5Hz 10Hz 20Hz 실감콘텐츠피드백실시간지원 사용자모션인식기술 모션인식정확도 85% 90% 95% 사용자스포츠모션인식정확도향상 스포츠인터랙션 스포츠모션버추얼코칭기술 코칭정확도 70% 80% 90% 전문가코칭수준의버추얼코칭구현 상황인지기반사용자인터페이스 인터페이스수 - 단일다중 상황인지기반인터랙션인터페이스구현 293
302
303 기술개발테마현황분석 노인과장애인을 위한근력보조 웨어러블로봇
304
305 노인과장애인을위한근력보조웨어러블로봇 정의및범위 웨어러블로봇은인간의신체로부터생체신호를측정하여구동부를제어하며, 이로써착용자의신체능력을향상시키고자하는장치를의미 노인과장애인을위한근력보조웨어러블로봇은인체에부착된기구부를구동하여착용자의근력을보조하며특히사용하지않는근육의퇴화를방지하고정상기능을할수있도록하는재활분야의료용로봇으로주로사용되며, 고령화로인한사회적요구의증대와장애를가진사용자들을위한기술적보완분야로정의될수있음정부지원정책 2018년 4차산업혁명신산업창출을위한산업기술 R&BD 전략미래시장중점투자분야에 AI 및로봇융합신기술발굴지원, 고령자건강증진기술등이포함 정부는재난현장대응기술을위한로봇개발계획을기획하였으며, 2014년재난대응과학기술역할강화 3개년실천전략에재난대응을위한장비탈부착식굴절로봇과개인방호를위한실시간위험감지수트, 근력강화수트등이포함 2015년정부는안전혁신마스터플랜과안전산업활성화방안의발표를통해범정부차원의재난 / 안전기술개발에대한정책수립하였으며, 이에따라국민안전처는산업연계형국가안전대진단추진기본계획에서 12대선도안전산업에재난대응로봇산업을포함 중소기업시장대응전략 강점 (Strength) ( 환경 ) 유연한산업구조 ( 기술 ) 우수한 IT 인프라 ( 정책 ) 산업지원정책수립기회 (Opportunity) ( 환경 ) 제조패러다임의변화 ( 기술 ) 기반기술연구 개발 ( 정책 ) 정부와업계의높은니즈 약점 (Weakness) ( 환경 ) 영세한산업구조 ( 기술 ) 핵심원천기술미흡 ( 정책 ) 산업계연계미흡위협 (Threat) ( 환경 ) 생산지원인프라부족 ( 기술 ) 글로벌업체와의기술격차 중소기업의시장대응전략 제조, 설계, 소프트웨어등의기존핵심요소기술역량을웨어러블로봇에접목하여신속한제품개발과사업화추진전략으로시장의요구에대응 실버산업, 의료산업등의분야에진출하려는기술형중소기업의적극적진출필요
306 핵심요소기술로드맵

307 노인과장애인을위한근력보조웨어러블로봇 1. 개요 가. 정의및필요성 웨어러블로봇은, 인간의신체로부터생체신호를측정하여구동부를제어하는장치를의미함. 이는착용자의신체능력을향상시켜주기위한장치이며, 최근생체인식기술이나초소형구동기술및경량소재등의발달로웨어러블로봇은점차현실화되고있음 웨어러블로봇의구동메커니즘은상지부와하지부로구분할수있으며, 두가지메커니즘을동시에지원하는형태도존재함 노인과장애인을위한근력보조웨어러블로봇은근력기능이약화된노인이나장애인의보행이나일상생활을보조하며, 중장기적으로는재활치료기능까지포함됨 [ 노인과장애인을위한근력보조웨어러블로봇의개발사례 ] 기존의보행재활치료에서는병원내에서수개월동안이뤄지는트레드밀기반의근력향상훈련이주된방법이었지만, 근력보조웨어러블로봇은치료와동시에어느정도의일상생활을가능하게하므로힘든재활과정을이겨내는데큰도움이될수있음 보행이불가능하여누워서만지내야하는사용자들로써는근력퇴화외의질병발생가능성이높게나타날수있으며, 주변의도움없이스스로활동할수있게된다는것은감정적으로도커다란심리적치료효과의장점이있음 노인과장애인을위한근력보조웨어러블로봇에서사용되는구동기에서는어느정도의힘을낼수있는사용자들이일상생활에거부감이없도록무저항구동제어기술이요구됨 일반적인착용형로봇과다른기술적요소로써, 재활치료의극대화를위한최적보조력을제공하는기술이필요하며임상적소견에따른의료기구로써의개발방향이우선시되어야함 299
308 기술개발테마현황분석 착용자의도에따라동작되는로봇개발을위해인체동작의해석이필요함 노인과장애인의경우, 복잡한수동조작방식이적절치않은경우가많으며앞으로가려고할때는몸통을약간앞으로기울이거나팔을앞으로뻗는등의사용자의도파악기술이별도로요구됨 기존착용형로봇개발관련해서적용되었던근전도센서, 비전처리, 족압및가속도센서등의다양한센서융합기술을통해실제사용자에게반영가능한제품이개발되어야함 최대한가벼우면서도큰힘을낼수있는경량기구부와고효율구동장치가필요하며, 다양한 사용자맞춤형제작이되면서도시장에서수용가능한가격이맞춰지기위해서는주요부품의 모듈화를통한대량생산이선행되어야함 300
309 노인과장애인을위한근력보조웨어러블로봇 나. 범위 (1) 제품분류관점 웨어러블로봇은구동기, 기구부, 생체신호측정등의기반기술로구성되며그외에도 보행상태감지를위해족저압측정기술이필요함. 또한로봇과인체의상호작용으로 동작되는제품특성상로봇데이터와착용자데이터관리기술이별도로요구됨 [ 제품분류관점기술범위 ] 기술개발테마제품분류관점세부기술 노인과장애인을위한근력보조웨어러블로봇 기반기술 구동기기술 운동학정보측정기술 동작의도파악기술 임베디드제어기술 모터및감속기기술 유압 / 공압등의큰힘을내기위한구동기술 높은착용성을위한차세대소프트구동기 위치, 자세, 속도, 가속도등의측정기술 힘정보측정기술 ( 구동력, 접촉력등 ) 뇌파 (EEG), 근전도 (EMG) 등의생체신호기반동작의도파악 조이스틱, 스마트폰등을통한수동입력방식 실시간제어알고리즘과이를위한 RTOS 구현기술 장치드라이버및전원관리등의추가요소기술 족저압측정 지면반력측정위한압력측정기술 로봇데이터관리 관절각도및각속도, 관절토크, 족저압, 배터리잔량등 착용자데이터관리 생체데이터 신체데이터 맥박, 호흡량, 산소포화도, 근전도등 착용자나이, 성별, 신장, 몸무게등 ( 그외심리적데이터포함가능 ) 301
310 기술개발테마현황분석 (2) 공급망관점 근력보조웨어러블로봇은모든인류삶의질을향상시키기위한사회적기술로써이러한분야의사업은인간의생존과안전에대한본능을채워주는것을궁극적목표로단순히기업가치창출보다는거시적인시대의요구를우선고려하여야함 의료기술, 보건환경등의발달로전세계적인초고령화시대에서향후노인을위한기술개발과사업방향은필연적이며, 근력보조웨어러블로봇은노화로인한노년층의불편을해소해줄수있는차세대기술로서새로운형태의실버산업창출잠재력이높은분야임 유전, 재난, 질병등으로인한장애로인해일상생활과사회참여가어려운환자들을위하여근력보조웨어러블로봇기술이적용될수있으며, 신경이활성화되어있거나완전히마비되어있는다양한형태의질환환자들을위한맞춤형요소기술개발이요구되고있음 [ 공급망관점기술범위 ] 기술개발테마공급망관점세부기술 기존의보행보조기는평지에서밀고나갈수있을정도의상황에서만제한적으로이용이가능했으나, 근력보조웨어러블로봇은계단이나경사등에서정상보행이가능하도록개발되어야함 노인과장애인을위한근력보조웨어러블로봇 실버산업 헬스케어 기존의보행보조기를사용할수없을정도로근력이약화된노인을위한경우에, 웨어러블로봇은미세한생체신호명령만으로도근력보조되는구동기를이용하여보행뿐만아니라앉고서는등의일상생활이가능하도록개발되어야함 허리나무릎관절등이약해진상황에서는근력보조를하면서도동시에부상이없도록안전성을가지는설계가요구됨 일상생활에서가벼운운동과자세교정등의역할이기대되며, 웨어러블로봇에부착된각종센서를이용한건강상태모니터링, 자세나보행의교정등의부가기능확장가능성이기대됨 노인및장애인을위한의료용웨어러블로봇기술은넓은범주에서헬스케어에포함될수있지만, 근력보조등의세부기술요소는이와차별화되는부분이많이존재함 하지부분마비재활치료 하지부분마비환자의재활치료를위한웨어러블로봇개발에서는상체기울어짐을통한보행의도분석등의기술연구가필요함 하지완전마비보행보조 척수손상등으로인한하지완전마비환자의보행보조를위한웨어러블로봇개발에서는사용자가로봇의구동을느낄수있도록해주는햅틱기술이나다양한일상환경에서의보행보조를위한정밀구동제어기술등이요구됨 302
311 노인과장애인을위한근력보조웨어러블로봇 2. 외부환경분석 가. 산업환경분석 (1) 산업의특징 웨어러블로봇산업은모터와감속기관련산업과기구부제작을위한제조업뿐만아니라, 최근의소프트수트제작을위한신소재산업이나데이터측정및전송을위한 IT 관련산업까지모두포함하는광범위한융복합산업영역임 인체에서직접적용되는제품의특성상기능성을높이기위한개발과함께안전성이나유해성을확보하기위한장기간의연구가함께고려되어야함 일상생활에사용되기위하여사용자편의성과외관디자인등을모두고려해야하며, 주요선진국에서는이러한웨어러블로봇의개발을위해다양한분야의융합연구와기반환경조성을동시에추진하고있음 국내의웨어러블로봇관련한세계적인기술력을효과적으로활용하기위해서기존제조업이나 IT업등과의다양한융합기술추진전략이시급함 의료 / 서비스등의일부한정된분야에서만로봇산업이창출되었으나, 웨어러블로봇개발추세에따라급속도로확대된사업화방향이예견되고있음 주요선진국들의거대 IT기업과핵심기술력을갖춘연구그룹이나중소기업은매년새로운제품과기술을발표하고있음 우리나라의경우로봇관련한기술력있는중소기업들이새로운시장을열지못하여매출실적이매우저조하며, 제조업이나서비스업등의타업종으로이탈하려는경우가많음 303
312 기술개발테마현황분석 (2) 산업의구조 노인과장애인을위한근력보조웨어러블로봇관련된후방산업은웨어러블로봇에사용되는주요핵심요소기술인모터및감속기제조, 생체신호측정관련센서, 로봇구동알고리즘및보조력제어등의기반기술관련산업 현재전량수입에의존하고있는고효율모터나하모닉드라이브감속기를국내개발하는시도와더불어, 이러한기존제품을웨어러블로봇에적용하기위한기구부하우징이나센서패키징등을통해부위별모듈화하는사업방향제안 복잡한연산을고속으로수행하는임베디드제어기와실시간 OS 기반의소프트웨어기술은기계나전기적인기반기술과함께필수요구되는요소임 많은사용자들로부터로봇과착용자의데이터를축적하여알고리즘개선이나안전성향상등의분석에적용하고자하는빅데이터관련기반기술이요구됨 전방산업은실버산업, 헬스케어, 하지재활치료와보행보조등으로구성 [ 노인과장애인을위한근력보조웨어러블로봇기술분야산업구조 ] 후방산업 근력보조웨어러블로봇기술분야 전방산업 모터및감속기제조, 생체신호측정관련센서, 로봇구동알고리즘및보조력제어, 임베디드소프트웨어, 데이터베이스구축 구동기, 운동학정보측정, 동작의도파악, 임베디드제어, 족저압측정, 로봇데이터관리, 착용자데이터관리 실버산업, 헬스케어, 하지부분마비재활치료, 하지완전마비보행보조 304
313 노인과장애인을위한근력보조웨어러블로봇 나. 시장환경분석 (1) 세계시장 ABI 리서치 ( 미국뉴욕 ) 에따르면웨어러블로봇시장은 2016 년 8,940 만달러에서 2021 년 4 억 7,390 억달러로연평균 39.6% 의성장을할것으로분석 [ 웨어러블로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 세계시장 * 출처 : ABI Research, 2015 IFR(International Federation of Robotics) 의 World Robotics 2017에따르면, 2016년세계로봇전체시장은규모는전년대비 13.2% 성장한 203억 5900만달러에달함 세계로봇시장은제조용로봇산업이주류를이루고있으며, 개인서비스용로봇산업은가파른상승세전망 웨어러블로봇이주로포함되는전문서비스용로봇시장은 `16년기준으로전년대비 6.5% 성장한 46억 7,400만달러로연평균 6.5% 의연평균성장률을나타냄 [ 세계로봇시장매출액 ] ( 단위 : 백만달러 ) 구분 12 년 13 년 14 년 15 년 16 년 16/15 년 CAGR 제조용 8,496 9,507 10,196 11,162 13, % 11.5% 서비스용 4,860 5,365 6,174 6,826 7, % 12.9% - 개인서비스용 1,224 1,704 2,134 2,229 2, % 36.8% - 전문서비스용 3,636 3,661 4,040 4,597 4, % 6.5% 합계 13,356 14,872 16,370 17,988 20, % 11.1% * 출처 : World Robotics 2017(IFR, 2017 년 ) 서비스용로봇은의료, 물류, 필드로봇등전문서비스로봇중심으로증가세를보이며시장형성 세계서비스용로봇시장규모 (IFR, `17.9) : 의료로봇 16.1억불, 물류시스템로봇 9.9억불, 착유 목축등필드로봇 9.8억불, 엔터테인먼트로봇 9.8억불, 국방로봇 7.7억불등 305
314 기술개발테마현황분석 [ 서비스로봇시장추이 ] ( 단위 : 백만달러 ) 구분 금액비중금액비중증가율금액비중증가율 Field Robotics 1,107 11% 984 9% -11% 1,104 8% 12% Logistic Systems 780 8% 992 9% 27% 1,133 8% 14% Medical Robotics 1,462 15% 1,611 14% 10% 1,833 13% 14% Defense Applications 1,038 10% 775 7% -25% 758 5% -2% Domestic Tasks 1,233 12% 1,558 14% 26% 2,012 15% 29% Entertainment Robots % 980 9% 0% 1,140 8% 16% Others 228 3% 331 5% 45% 412 5% 24% 합계 6, % 7, % 6% 8, % 16% * 출처 : World Robotics 2017(IFR, 2017 년 ) (2) 국내시장 16 년말기준으로로봇산업총생산액은 4 조 4,903 억원으로, 전년도생산액 3 조 9,576 억 원대비 13.5% 증가 [ 국내로봇시장현황 ] 구분 ( 증감 ) 생산매출수출수입 ( 단위 : 억원, %) 비중 비중 비중 비중 제조 23,061 24,293 26,688 (9.9) 서비스 4,624 5,885 7,107 (20.8) ,671 25,831 27,009 (4.6) 6,916 3, ,694 6, ,834 4,391 (2.4) ( 9.1) ,464 1, ,020 6, ,098 1,046 (18.9) (47.2) (75.5) 12.6 전문 1,377 2,629 3,733 4, ,615 2,830 (42.0) (43.3) (129.4) (223.9) 11.1 개인 3,247 3,256 3,374 3, ,45 3,447 (3.6) ( 1.1) (11.0) ( 60.8) 1.5 부품 6,135 9,397 11,108 (18.2) ,983 10,060 11,499 (14.3) 1,027 1, ,780 1,558 (183.7) ( 7.4) 23.2 합계 33,820 39,575 44,903 45,972 9,483 6, ,674 42, ,104 8, ,977 6,394 (13.5) (9.0) (16.2) ( 2.8) 100 * 출처 : 2017 로봇산업실태조사보고서 ( 한국로봇산업협회, 2017 년 ) 2016년을기준으로전문서비스용로봇품목의출하액은 3,949억원으로나타남 기타전문서비스용로봇 (1,134억원 ) > 의료로봇 (1,030억원 ) > 군사용로봇 (517억원 ) > 사회안전및극한작업로봇 (355억원 ) 등의순으로나타남 전문서비스용로봇시장에서는의료로봇이가장큰부분을차지하고있는것으로파악 306
315 노인과장애인을위한근력보조웨어러블로봇 [ 전문서비스용로봇생산현황 ] ( 단위 : 억원 ) 노인과장애인을위한근력보조웨어러블로봇의국내연구 / 개발현황및기술수준 국내웨어러블로봇관련핵심요소기술은정부와기업의적극적인투자로성숙단계에진입하였음 (SG Robotics : 2016 Cybathlon 대회 exoskeleton for complete paraplegia부문에서동메달획득 ) 재활및치료를위한근력보조웨어러블로봇시장은초기시장에진입한기업이주도하고있음 (Cyberdyne/ 일본, ReWalk Robotics/ 이스라엘, Ekso Bionics/ 미국, Parker Hannifin/ 미국등 ) [ 재활및치료를위한근력보조웨어러블로봇의 FDA 승인현황 ] 초기시장을선점한기업은높은시장점유율을기반으로임상데이터를확보하고있으며, 이를통해사업영역을점차확대해나가고있음 국내 외웨어러블로봇관련핵심요소기술은정부와기업의적극적인투자로성숙단계에진입하였으나, 임상연계연구가부족하여시장진입에많은어려움을겪고있음 국내기업이세계시장에진입하기위해서는실증센터구축을통해임상적효과검증및안전성을확보하고이를기반으로시장점유율을확대하는전략이필요 307
316 기술개발테마현황분석 다. 기술환경분석 국내외근력보조웨어러블로봇분석 정상인의근력증강을위한웨어러블로봇이개발됨에따라, 그간의원천기술을이용하여재활치료, 근력보조목적의노인및장애인용웨어러블로봇이개발됨. 따라서노인과장애인을위한근력보조웨어러블로봇의연구기관은기존에근력증강웨어러블로봇연구를선행하였음 [ 노인의근력보조를위한웨어러블로봇의주요사례분석 ] 국가 이름연구기관 초기모델발표년도 특징 제어메커니즘 구동메커니즘 적용부위 WAD HONDA 2007 간단히벨트로착용이가능한편안한디자인과경량의로봇으로매일착용해야하는환자들에게효과적임 에너지분산제어 반능동구동 하지 일본 HAL Cyberdyne 년부터지금까지일본내복지시설과병원에임대형식으로제공되어안정성을입증받았음최근일본정부의승인으로전세계시장에진출할수있게됨 생체신호측정및행동의도파악 전기모터 하지 HEXAR- UR10 한양대학교, ( 주 ) 헥사시스템즈 2010 고관절에보조력을생성하여보행보조힘센서를통한의도파악 전기모터 고관절 SUBAR 서강대학교 2005 능동캐스터워커를동반하여사용자에게구동기장치의무게를부과하지않음 근섬유팽창도측정 / 보행패턴측정 전기모터 하지 한국 전동워커동력보행보조기 (PGO) 재활공학연구소 ( 보건복지부지원 ) 2009 양쪽고관절부위에인공근육을통한공기압력으로교차보행을도움전동워커는보행보조기, 사용자의안전성및독립성을위하여고안된제품 퍼지를이용한균형제어 복합 하지 308
317 노인과장애인을위한근력보조웨어러블로봇 [ 장애인의근력보조와재활치료를위한웨어러블로봇의주요사례분석 ] 국가 이름연구기관 초기모델발표년도 특징 제어메커니즘 구동메커니즘 적용부위 MANUS 매사추세츠공과대학교 1997 어깨와팔꿈치의재활치료용환자는컴퓨터화면에보이는지시를따라하면서재활치료를받을수있음보조정도는환자의상태에따라결정됨 임피던스제어전기모터상지 미국 elegs Ekso Bionics 2008 UC 버클리의연구진이 Berkeley Bionics 사를설립한후, Ekso Bionics 로변경어깨에부착된의도입력장치로의사를전달하면위치제어방법을통하여운동구현 위치제어전기모터하지 스위스 ARMEO LOKO- MAT Hocoma 뇌졸중, 외상성뇌손상혹은신경질환으로인하여손과팔에장애가있는환자들을위한재활운동로봇으로가상현실을이용하여환자의재활치료를도움 컴퓨터화면에표시되는대로보행을유도하고, 부족한근력을모터를이용하여보조함트레이드밀과연동하여다양한재활프로그램구현가능 임피던스제어 / 순응제어 전기모터 상지 임피던스제어전기모터하지 미국독일이스라엘 ReWalk ReWalk 2010 미국, 독일, 이스라엘등다양한국가에연구진과투자자가분포되어있는다국적회사 elegs 와유사한기능을가짐 위치제어전기모터하지 경제사회적파급효과 현재전세계적으로보조기를필요로하는인원은약 1억3000만명정도로추정됨 이로인한웨어러블로봇시장은 2014년이후연평균 69% 씩성장할것으로전문가들은예측하고있음. 보행보조와간병, 재활치료용보조로봇의수요는계속해서증가할것임 한정된자원으로인해현재치료를받지못하고있는잠재환자들이, 웨어러블로봇을통하여일상생활에서재활치료를받고원격으로진료를받을수있게되면현재그크기를가늠하기어려울정도의큰잠재시장이생성될것임 전세계적으로수요가확대되고있는웨어러블로봇이나, 관련기술의연구는특정국가에집중되어있는현실임 현재상용화되어있는로봇도고가의로봇들이어서시장이제대로형성되지않은상태임 - 일반인들이구매하여일상생활에서효과를볼수있는저가의로봇을개발하여세계시장에대량으로공급가능 309
318 기술개발테마현황분석 또한웨어러블로봇을위하여개발된핵심요소기술들은그외지능형서비스로봇에도응용가능, 우리나라가로봇강국으로입국하기위한원초기술이될것임 지능형로봇개발및보급촉진법에따라로봇제품보급확산을통한국내외시장창출을 목적으로시장창출형로봇보급사업이운영중임 산업부와로봇수요처인각관계부처협력을통해운영하고한국로봇산업진흥원에서평가및관리총괄 기본방향은신제품개발이후시장창출단계중간단계를지원하여로봇기업의사업화적용실적확보와제품의우수성입증기회제공을하고있음 11년부터 16년까지 111개과제 1,091억원예산을투입하여 2,756억원매출성과 의료재활, 로봇부품, 농업용, 수중로봇, 국방용, 교육용등의공공수요발굴형과공모방식발굴형사업으로다양한분야에투입하고있음 사회안전분야웨어러블로봇으로 15년 4대를투입함 대형재난현장에서인명구조및화재진압소방관의근력지원용으로경북소방학교등에투입 지원사업비 6억원예산투입으로 36억원매출성과, 2022년까지 966억원매출달성을전망 비용대비편익의비율도약 2.14로추정 310
319 노인과장애인을위한근력보조웨어러블로봇 3. 기업분석 가. 주요기업비교 SG로보틱스는완전마비장애인용일상생활보조로봇 (WalkON, 국제사이보그올림픽세계 3위 ), 근력이부족하거나보행이불편한사람들이사용하는근력 / 보행보조로봇 (Angelegs, UAE Robotics for Good 대회 3위 ) 제조판매 엑소아틀레트아시아는하지마비환자들을대상으로한외골격보행보조웨어러블로봇을제조판매하고있으며엑소아틀레트1은어플리케이션과블루투스를이용해환자상태에따라보복, 보행속도, 보행높이등을설정할수있음. 러시아스콜코보스타트업빌리지에서대상을수상 (2014년) 하였고러시아에서의료기기 2등급으로인증, 국내에서는 KC인증을획득 엔티로봇은병원용로봇 ( 병원물류운반로봇, 의료의약용클린멸균로봇, 항암조제로봇시스템 ), 헬스케어로봇 ( 척수손상장애인용웨어러블보행로봇, 웨어러블근력증강로봇, 헬스케어용로봇팔, 식사보조로봇 ), 고속병렬링크로봇, 비정렬피킹로봇등을제조판매 피앤에스미캐닉스는세계최초로발목관절구동기능및관절간길이자동조절기능을갖고있는보행재활로봇인워크봇-G를개발하여상품화. 근전도센서가장착돼환자의의지에맞게장시간재활훈련가능 헥사시스템즈는착용형로봇에관한기본플랫폼을갖추고있는기업으로국내착용형외골격로봇의선두기업임. 근력증강용외골격로봇및재활훈련용로봇등을개발하여병원기관 IRB 승인 (2012년), KR-40P 특허기술상인홍태용상을수상 (2014년). 착용형로봇기술의간소화 실용화를통해국내의료로봇시장창출 [ 주요중소기업비교 ] ( 단위 : 백만원,%) 국내업체자산총계매출액 매출액증가율 영업이익율당기순이익율 R&D 집중도 엔티로봇 2, 피앤에스미캐닉스 2,514 1, ) 헥사시스템즈 1, ) 2015 년 R&D 집중도 311
320 기술개발테마현황분석 나. 주요업체별기술개발동향 이스라엘의리워크로보틱스 (Rewalk Robotics) 는하지재활용로봇 리워크 (ReWalk) 를개발 상용화된하지재활로봇의대표격인제품으로, 2012년런던마라톤에서하반신마비환자가리워크를착용하고 16일만에완주에성공함 끊임없는제품개선으로기능을업그레이드하고있으며현재 ' 리워크 (Rewalk Rehabilitation 2.0)' 와 ' 리워크퍼스널 6.0(ReWalk Personal 6.0)' 두가지모델이출시됨 - 리워크 2.0은기관용 ( 기관과개인모두사용가능 ) 이며리워크퍼스널 6.0은개인용 - 리워크 2.0은배낭처럼등에메는배터리팩이존재하나, 리워크퍼스널 6.0은벨트처럼허리에차는주머니형태로변경됨 일본사이버다인은재활치료용, 산업용등여러분야에서다양한부위에착용할수있는 HAL을개발 몸을움직일때뇌에서근육으로전송되는생체전위신호를읽어착용자의동작을지원하는방식 여성이나고령자도착용할수있도록 3kg의경량모델로제작되었으며, 45분충전으로최대 3시간사용가능 캐나다바이오닉레버러터리 (Bionik Laboratories) 는아마존의인공지능음성인식비서인아마존에코를자사가개발한로봇인아르케 (ARKE) 에탑재시킴 아르케는척수손상환자혹은뇌졸중으로인해움직임이불편한사람들을위해개발됨 슈트로봇은착용뒤상체의미묘한움직임만으로도걷거나서있을수있음 국내 SG 로보틱스 (SG Robotics) 는 2017 UAE Robotics for Good 에서 1000여대의로봇중 3위에입상한주행보조로봇인엔젤렉스 (Angelegs) 를발표 엔젤렉스는근력이부족하거나보행이불편한분들의보행을도와주며, 무저항구동기, 자동보행인식, 자유로운길이조절이가능해사용성이뛰어남 한국생산기술연구원은하반신마비환자의자력보행이가능한로빈 (ROBIN-P1) 을개발 신체치수에맞출수있는가변프레임으로제작되어다양한체격의사용자가착용가능 로봇스스로사용자의보행의도를감지하여동작하며, 목발에부착된센서를바탕으로높은안전성을보유 헥사시스템즈는노약자등하지허약자의고관절동작을보조해보행을돕는 HEXAR-WA20을개발 보행속도를판단하고고관절을작은힘으로움직이게하는알고리즘으로구성되어노약자가편안하고빠르게걸을수있도록지원 312
321 노인과장애인을위한근력보조웨어러블로봇 착용자의보행의도를습득하여속도및보폭을자동으로변환할수있으며, 버튼형모드변환 기능을갖추고있음 헥사시스템즈는상 하지근력증강로봇등 6 개분야에적용가능한다양한웨어러블로봇을개발 한국과학기술연구원은작은힘으로무거운물건을사용할수있도록도와주는큘렉스 (KULEX) 를개발 큘렉스는 10-자유도상지근력보조로봇시스템으로스스로팔조차들어올릴수없을정도로근력이부족한노약자나장애인이칫솔질, 빗질, 식사등의일상생활을할수있도록어깨, 팔꿈치, 손목, 손가락의근력을보조함 1-자유도파지모듈, 3-자유도손목모듈, 6-자유도어깨-팔꿈치모듈, 사용자의의도및작업상태를분석하는의도인식기술을통해근력을보조하는알고리즘구성 감독자가존재하고재활치료환경이잘갖추어진병원등의시설에서사용하는것뿐만이아니라, 일상생활에서도손쉽게사용할수있도록개발됨 현대자동차는고령자나장애인들의보행을지원하는 H-LEX를개발 다리에보다큰힘을제공하는증폭모드, 넘어지는것을예방하는부상방지모드, 스스로걷기힘든사람을걸을수있게보조해주는보행모드등의기능제공 스마트폰과태블릿 PC 등모바일기기와연동해착용자가모드를변경하거나속도등을조절할수있으며걷는자세나부담이가해지는부위등에관한개인정보를확인가능 현대는 H-LEX를단순한노령자나장애인용제품으로제한하지않고, 다양한형태의이동성을보장하는장비로정의 313
322 기술개발테마현황분석 4. 기술개발현황 가. 기술개발이슈 보행재활용외골격로봇은뇌졸중등의뇌질환으로인해정상적인보행을하기어려운 환자들을지원하는용도로사용되는로봇 병원이나요양원에서치료를목적으로보행훈련을하도록개발된로봇, 일상생활중에착용하고 재활훈련을하도록개발된로봇, 보행을보조해주는로봇을모두포함 제조용로봇과다른서비스로봇과는달리, 노인이나장애인과직접적인상호작용이 이루어지기때문에중량, 부피, 파워등의조건을만족하도록설계되어야함 전통적인외골격로봇들은효과적으로힘을전달하는능력과단단한기계구조로인해 착용자의몸을잘지지할수있는장점을보유했지만, 사람과의상호작용에서문제가발생 최근개발되는소프트웨어러블로봇들은단단한골격구조와기계적관절을가지고있지않아, 기존의외골격형태의웨어러블로봇이가지고있는여러제한사항을극복가능 발목과무릎동작을돕기위한능동형소프트보조장비, 걷는동안일어나는물질대사의에너지효율을증가하는엑소수트, 케이블기반또는공압기반근육구동기를사용한상지및하지재활시스템등 사람의피부와조직처럼부드러움을가진능동소재들의개발이요구됨 소프트웨어러블로봇들이지금보다더실용적으로동작하기위해서는센서뿐만아니라, 착용자의의도까지실시간으로정확히파악할수있는기술개발이필요 한국과학기술연구원에서는 Cable-Differential Mechanism 을적용한외골격로봇을제안 뇌졸중편마비환자의고관절, 슬관절보조를위한로봇으로, 4.8kg 의가벼운무게를구현 차동기어방식의동력전달을통해관절당최대 62Nm 라는높은토크를나타냄 미국텍사스댈러스대학에서는뇌졸중환자의하지재활훈련을위한경량외골격로봇 디자인을제안 무릎과발목관절보조를위한로봇으로, 4.88kg 의가벼운무게를구현 미국콜럼비아대학에서는 cable 을사용한외골격로봇 C-ALEX 를개발 액추에이터를사람이아닌외부프레임에설치하고 Bowden cable 을이용해착용자의종아리와 허벅지에힘을전달 314
323 노인과장애인을위한근력보조웨어러블로봇 나. 특허동향분석 노인과장애인을위한근력보조웨어러블로봇특허상주요기술 주요기술 노인과장애인을위한근력보조웨어러블로봇은사용자의도파악기술로사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술과상체기울어짐을통한보행의도추정기술이있고, 무저항구동제어기술로무저항정밀토크보조력생성기술과무저항구동기설계및제작기술이있으며, 고정밀구동장치설계기술로경량 / 소형화된고정밀구동장치설계기술과전원 / 센서 / 구동기등이일체화된구동모듈양산기술로구분됨 분류요소기술설명 사용자의도파악기술 무저항구동제어기술 고정밀구동장치설계기술 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술 상체기울어짐을통한보행의도추정기술 무저항정밀토크보조력생성기술 무저항구동기설계및제작기술 경량 / 소형화된고정밀구동장치설계기술 전원, 센서, 구동기등이일체화된구동모듈양산기술 센서융합기술기반의사용자의도파악 정밀힘보조력제공을위한무저항구동제어 경량 / 소형화된일체형고정밀구동모듈제공 세부분야별특허동향 주요기술별국가별특허동향 노인과장애인을위한근력보조웨어러블로봇의요소기술별주요국가별특허정보데이터 입수하였으며, 최근 10 년간의특허데이터를비교분석함 분류요소기술한국미국일본유럽계 사용자의도파악기술 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술 상체기울어짐을통한보행의도추정기술 무저항구동제어기술 고정밀구동장치설계기술 무저항정밀토크보조력생성기술 무저항구동기설계및제작기술 경량 / 소형화된고정밀구동장치설계기술 전원, 센서, 구동기등이일체화된구동모듈양산기술 합계
324 기술개발테마현황분석 국가별요소기술별특허동향에서사용자의도파악기술에는미국이가장많은비중을차지하고 dlt으며, 유럽이상대적으로적은출원량을보유하고있음 무저항구동제어기술에는한국이가장많은비중을차지하고있으며, 유럽이적은출원이진행되었음 고정밀구동장치설계기술에는미국이가장많은출원을진행하고있으며, 유럽이적은출원이진행되었음 사용자의도파악기술을제외하고무저항구동제어기술과고정밀구동장치설계기술은출원건수가많지않아연구개발이활발히진행되고있지는않음을알수있음 주요기술별출원인동향 세부분야 요소기술 기술집중도 주요출원인 국내특허동향 사용자의도파악기술 무저항구동제어기술 고정밀구동장치설계기술 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술 상체기울어짐을통한보행의도추정기술 무저항정밀토크보조력생성기술 무저항구동기설계및제작기술 경량 / 소형화된고정밀구동장치설계기술 전원, 센서, 구동기등이일체화된구동모듈양산기술 ROCKWELL 삼성전자 L&P PROPERTY NOODOE DEERE JC BAMFORD KOHLER 문건 TECHNO ONE AKIRA KOICHI CARNEGIE UNIV 대기업중심 삼성전자, 라쉬반코리아 개인출원인중심 문건, 박동원 외국기업중심 아이워크 개인출원인중심 문건 중소기업중심 한국광학기계, 디메디 외국기업중심 엠티에스시스템즈, 아이워크 : 50 건이상, : 30~49 건, : 20~29 건, : 10~19 건, : 10 건미만 사용자의도파악기술분야주요출원인동향 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술분야는 ROCKWELL이가장많은특허를보유하고있으며, 그다음으로삼성전자등이많은특허를보유하고있음 상체기울어짐을통한보행의도추정기술분야는 L&P PROPERTY가가장많은특허를보유하고있으며, 그뒤를 NOODOE, DEERE 등이따르고있음 무저항구동제어기술분야주요출원인동향 무저항정밀토크보조력생성기술분야는 JC BAMFORD 가가장많은특허를보유하고있으며, 그 다음으로는 KOHLER 등이많은특허를보유하고있음 316
325 노인과장애인을위한근력보조웨어러블로봇 무저항구동기설계및제작기술분야는문건 가가장많은특허를보유하고있음 고정밀구동장치설계기술분야주요출원인동향 경량 / 소형화된고정밀구동장치설계기술분야는 TECHNO ONE이가장많은특허를보유하고있으며, 그다음으로는 AKIRA KOICHI 등이특허를보유하고있음 전원, 센서, 구동기등이일체화된구동모듈양산기술분야는 CARNEGIE UNIV가가장많은특허를보유하고있음 노인과장애인을위한근력보조웨어러블로봇분야의주요경쟁기술및공백기술 노인과장애인을위한근력보조웨어러블로봇분야의주요경쟁기술은사용자의도파악기술의사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술과상체기울어짐을통한보행의도추정기술이고, 공백기술은무저항구동제어기술의무저항정밀토크보조력생성기술과무저항구동기설계및제작기술과고정밀구동장치설계기술의경량 / 소형화된고정밀구동장치설계기술로나타남 노인과장애인을위한근력보조웨어러블로봇분야에서사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술이가장경쟁이치열할분야이고, 무저항정밀토크보조력생성기술분야는아직까지출원이활발하지않은공백기술분야로나타남 세부분야요소기술기술집중도 사용자의도파악기술 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술 상체기울어짐을통한보행의도추정기술 무저항구동제어기술 무저항정밀토크보조력생성기술 무저항구동기설계및제작기술 고정밀구동장치설계기술 경량 / 소형화된고정밀구동장치설계기술 전원, 센서, 구동기등이일체화된구동모듈양산기술 : 50 건이상, : 30~49 건, : 20~29 건, : 10~19 건, : 10 건미만 317
326 기술개발테마현황분석 최신국내특허기술동향 분류요소기술최근핵심요소기술동향 사용자의도파악기술 무저항구동제어기술 고정밀구동장치설계기술 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술 상체기울어짐을통한보행의도추정기술 무저항정밀토크보조력생성기술 무저항구동기설계및제작기술 경량 / 소형화된고정밀구동장치설계기술 전원, 센서, 구동기등이일체화된구동모듈양산기술 사용자의행동및상황을데이터를통해분석하고수집및 저장하는기술 센서를통해센싱된데이터를전송하고통신하는기술 시각장애인을위한보행보조기술 보행훈련을위한보행보조로봇 지형적응형보조로봇기술 원격제어유닛을통한구동기제어 사물인터넷및스마트로봇기술 근력보상장치이용기술 일체화부품제조기술 국내특허동향을살펴보면대기업과중소기업은사용자의도파악을위한센서융합기술을집중적으로연구개발하고있으며, 국내에출원한외국기업은무저항정밀토크보조력생성기술과전원 / 센서 / 구동기등이일체화된구동모듈양산기술을집중하여연구개발을하고있는것으로나타남 사용자의도파악기술에서사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술은사용자의행동및상황데이터를분석, 수집및저장하는기술이나, 센싱된데이터를전송하고통신하는기술에집중되고있으며, 상체기울어짐을통한보행의도추정기술은시각장애인을위한보행보조기술또는보행훈련로봇기술에집중되고있음 무저항구동제어기술에서무저항정밀토크보조력생성기술은지형적응형보조로봇기술에, 무저항구동기설계및제작기술은원격제어유닛을통한구동기제어나사물인터넷및스마트로봇기술에연구개발이진행되고있음 고정밀구동장치설계기술에서경량 / 소형화된고정밀구동장치설계기술은근력보상장치이용기술에집중되고있으며, 전원 / 센서 / 구동기등이일체화된구동모듈양산기술은일체화부품제조기술에중심이되어연구개발하고있음 318
327 노인과장애인을위한근력보조웨어러블로봇 중소기업특허전략수립방향및시사점 노인과장애인을위한근력보조웨어러블로봇분야의공백기술분야는무저항정밀토크보조력생성기술, 무저항구동기설계및제작기술및경량 / 소형화된고정밀구동장치설계기술이고, 중소기업의시장진입이상대적으로수월한분야는고정밀구동장치설계기술로나타남 노인과장애인을위한근력보조웨어러블로봇분야는자동차, 군사용등에사용되는센싱, 정밀제어및일체형제조기술등에활용될수있을것으로판단됨 무저항구동제어기술은기술개발이활발하게진행되고있지않고다수의특허를보유하고있는기업이존재하지않아, 초기연구개발투자가필요할것으로보이며, 중소벤처기업의참여가높을수있는분야는고정밀구동장치설계기술임 실버산업의중요성이증대되고있는추세이나, 실제적으로근력보조웨어러블로봇기술에대한기업의관심이더필요한상황임 319
328 기술개발테마현황분석 5. 연구개발네트워크 가. 연구개발기관 / 자원 연구개발기관 노인과장애인을위한근력보조웨어러블로봇분야주요연구개발기관 전자부품연구원융합시스템연구본부 ( 본부장이형수 ) - 휴먼케어시스템연구센터 : 라이프케어및생활환경케어기기 SG로보틱스 - 서강대학교공경철교수가창업한 SG로보틱스에서개발한 Angelegs는 UAE Robotics for Good 2017에 3위로입상해기술력을증명하였고, 근력이부족하거나보행이불편한분들의보행을돕기위해개발되었고, WalkON Suit는완전마비장애인을위한일상생활보조로봇으로 2016년국제사이보그올림픽 ( 사이배슬론 ) 에서랭킹 3위에올라기술력을입증 헥사시스템즈 - 노약자등하지허약자를위한보행보조기기를개발하였고, 허리벨트형또는어깨벨트등을이용하여무게를분산시킴 - 근육의재건및관절운동의회복등에사용하는전동식무릎관절운동기구를개발하였고, 탈 / 착이용이하며경량화 / 간소화된메커니즘을이용하여다양한자세에서재활운동이가능 - 팔꿈치및어깨관절운동에도움을주는상지재활운동기기를개발 LG전자 - 노약자의걷기보조, 앉기 서기, 탑승등세가지기능을제공하는전동근력보조시스템을탑재한 스마트워커 개발 - 스마트패드와조이스틱을달아기기를처음쓰는사용자도쉽게익힐수있게제조하였고, 사용자가조이스틱을미는강도를감지해바퀴를움직이고, 걷는속도에맞춰동작을지지해줌. 또버튼하나만누르면의자가나와바로앉을수있어전동휠체어처럼앉은상태에서속도를조절하며이동이가능 현대중공업 - 보행재활로봇인 모닝워크 (Morning Walk) 는지금까지뇌졸중환자등의치료에사용되면서로봇을이용한재활치료에대한환자와의료진의만족도가높음 - 환자이동보조로봇 캐리봇 (Carrybot) 은 100회이상의실증을통해환자이동시근력절감효과와이용편리성을입증 연구개발자원 국가연구개발지원사업 중소벤처기업부 - 중소기업기술혁신사업 320
329 노인과장애인을위한근력보조웨어러블로봇 - 상용화기술개발사업 ( 구매조건부등 ) - 융복합기술개발사업 - 산학연협력기술개발사업 - 제품서비스기술개발사업 - 중소기업 R&D 역량제고사업 - 제품 공정개선기술개발사업 - 맞춤형기술파트너지원사업 - 산연전용과제 : 우수 R&D 인프라를활용한대표적인중소기업지원연구기관으로연구부서와중소기업간연계를통한기술지원은물론변리사, 산학연협력코디네이터, 기술거래사, 기술가치평가사등기술사업화관련전담인력이사업화사안마다관여해고품질비즈니스컨설팅제공 산업통상자원부 - 에너지 자원기술개발사업 - 전략핵심소재기술개발사업 - 신재생에너지기술개발사업 - 산업융합원천기술개발사업 - 로봇미래전략 (2013~2022) - 산업엔진프로젝트 (19대미래성장동력 ) - 사업화연계기술개발사업 ( 민간투자연계형등 ) - 로봇산업발전방안 ( 첨단로봇상용화연궨터건립및로봇시스템설계기술개발지원등 ) - 재활로봇융합얼라이언스 ( 재활로봇시장활성화와제도개선방안논의, 재활로봇등유망서비스로봇중심의공공수요발굴, 보급 확산사업추진 ) 보건복지부 - 국립재활원 보훈병원등에재활로봇보급 - 국공립병원에국산수술로봇선도제품시범적용 로봇산업정책협의회 - 창의적 도전적로봇연구촉진을위한풀뿌리지원프로그램 한국로봇산업진흥원 - 로봇산업클러스터 : 센터와장비를구축하고, 기술사업화촉진및로봇창업맞춤형지원과상용화기술개발지원을통해의료, 사회안전, 제조분야의로봇산업육성을목표로함 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 - 시장창출형로봇보급사업 : 보건복지부와국립재활원이참여하는의료재활로봇보급사업, 산업통상자원부와부천산업진흥재단이참여하는시장창출형로봇부품보급사업등의공공수요형사업과아이디어발굴형사업을진행 321
330 기술개발테마현황분석 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등맞춤형기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원 ) - e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 322
331 노인과장애인을위한근력보조웨어러블로봇 나. 연구개발인력 노인과장애인을위한근력보조웨어러블로봇분야는한국과학기술연구원, 한국생산기술 연구원, 한국기계연구원에서주로연구개발을진행하고있음 정부는개방형로봇산업생태계조성을위해인력양성측면에서多기술영역업무수행및 다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형로봇 전문인력양성추진 [ 노인과장애인을위한근력보조웨어러블로봇분야주요연구조직현황 ] 기관 한국과학기술연구원 한국생산기술연구원 한국기계연구원 숭실대학교 323
332 기술개발테마현황분석 다. 기술이전가능기술 (1) 기술이전가능기관 노인과장애인을위한근력보조웨어러블로봇의요소기술은크게사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술, 무저항정밀토크보조력생성기술, 전원 / 센서 / 구동기등이일체화된구동모듈양산기술의총세개의분류로구분됨 기술이전이가능한기관은한국과학기술연구원, 한국생산기술연구원이있음 [ 노인과장애인을위한근력보조웨어러블로봇요소기술연구조직 ] 분류요소기술기관 사용자의도파악을위한센서융합기술 무저항정밀토크보조력생성기술일체화된구동모듈양산기술 다중센서를이용한보행재활로봇지면반발력산출방법 뇌졸중환자의보행재활을위한착용형외골격로봇 보폭과발드는높이의도감지를가능하게하는보행보조로봇제어기구 보행재활로봇의골반지지장치 능동형재활치료로봇 숭실대학교한국과학기술연구원한국생산기술연구원한국과학기술연구원한국기계연구원 324
333 노인과장애인을위한근력보조웨어러블로봇 (2) 이전기술에대한세부내용 분류 기술명 세부내용 뇌졸중환자의보행재활을위한착용형외골격로봇 뇌졸중환자의보행장애극복을위한착용형외골격로봇설계및제어방법 기술이전목적및필요성 골반운동이가능한구조를갖는보행재활로봇 : 보행에필요한하지관절 ( 고관절 / 슬관절 / 족관절 ) 뿐아니라, 골반의움직임 ( 회전 / 좌우이동 ) 이가능한재활로봇시스템설계및제작방법 환자의의도를보행에반영할수있는 minimize-force controller : 각링크 ( 대퇴 / 하퇴 ) 에부착된센서와근전도센서를기반으로환자의의지를실시간으로로봇의보행속도에반영할수있는제어 기술활용방안및기대성과 편마비환자의하지보행을위한하지모션훈련 : 편마비환자의경우밸런스 ( 골반움직임 ) 이중요하므로본재활로봇은골반의회전과좌우이동이가능한재활로봇으로, 보행중에발생하는좌우균형감각에기여함 Top-down 방식의보행재활훈련 : 환자의의지를로봇의보행에반영하여, 로봇의속도를실시간으로변경함으로써 top-down 방식의보행재활훈련이가능 보행재활훈련기술, 물리적재활이필요한의료관련전분야에적용이가능함 세부문의 기술관련 한국과학기술연구원 325
334 기술개발테마현황분석 분류 세부내용 기술명 보행재활로봇의골반지지장치 기술이전목적및필요성 본기술은보행재활로봇의골반지지장치에관한것으로, 더상세하게는, 재활자의다리에연결되는보행보조링크부재의하중이전가되지않으면서, 자연스러운보행패턴을훈련할수있도록보조하는보행재활로봇의골반지지장치에관한것임 기술활용방안및기대성과 해당기술의실시예에따른골반지지장치는재활자의다리에연결되는보행보조링크부재를구비하는보행재활로봇에사용되는장치로서, 지지프레임 ; 상기지지프레임의길이방향을따라직선이동이가능한한쌍의지지바 ; 상기지지바가상기지지프레임의길이방향을따라이동하도록동력을전달하는제1 구동기 ; 각각의지지바의내측에배치되는볼스크류 ; 상기볼스크류에결합되어, 상기볼스크류의구동에따라상기지지바의길이방향을따라직선이동가능한이동블록 ; 및상기볼스크류를구동시키는동력을전달하는제2 구동기를포함함 기술관련 한국과학기술연구원 세부문의 계약관련 ( 재 ) 경북테크노파크 326
335 노인과장애인을위한근력보조웨어러블로봇 분류 세부내용 기술명 능동형재활치료로봇 기술이전목적및필요성 상지부재활치료로봇기술은선진국들의노령화및뇌손상에따른환자의증가로필요성이증가함 기존에는어깨의움직임시발생하는상완골두 (humerus head) 의움직임을고려하지않거나단순한형태로간략화하여구현하는데그쳤으며, 재활치료환자에게전달하고자하는임피던스를정확하게전달하는데한계가있었음 재활로봇에특화된고성능의통합구동모듈을개발함 모터, 모터드라이브, 토크센서, 하모닉드라이브, 증분형엔코더, 절대엔코더그리고브레이크로구성되며, 모든구성요소가박형이자중공형의형상을가지고하나의하우징으로조립될수있도록통합구동모듈을설계제작함 기술활용방안및기대성과 어깨관절의 6자유도비선형움직임을자연스럽게구현할수있으면서사용자에게전달되는임피던스를정교하게제어함 소형경량이면서도충분한출력을내고, 구동및센싱모듈의안전성과정밀성이높으며, 고성능의임피던스제어가가능한통합구동모듈임 물리치료사가재활환자를대상으로재활로봇을사용한운동을수행시의치료행위를정량화할수있는물리치료사재활치료행위자동모델링기법을개발함 타이밍벨트를사용하지않고기 4축상지재활 ( 어깨 3축, 팔꿈치 1축 ) 메커니즘과 3축수지부재활 ( 손목 3축 ) 메커니즘을채용함 축별토크센서신호를이용하여고성능의임피던스제어가가능하며, 무게가많이걸리는조인트의경우돌발적인상황에서도브레이크를통해환자에게무게부하가걸리지않음 절대엔코더신호를기반으로매번작동시마다초기위치를세팅할필요없이자동으로원하는자세에서바로시작할수있으며증분형엔코더와의이중체킹을통해제어안전성을높임 세부문의 기술관련 한국기계연구원 327
![기술개발테마현황분석 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 노인과장애인을위한근력보조웨어러블로봇분야키워드클러스터링 ] [ 노인과장애인을위한근력보조웨어러블로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1.](/docs-images/93/112329278/images/336-1.jpg "Controlling devices using facial expression identification and 클러스터 01 identification, token 1~3 recognition for assisting physically disabled 2.")
336 기술개발테마현황분석 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 노인과장애인을위한근력보조웨어러블로봇분야키워드클러스터링 ] [ 노인과장애인을위한근력보조웨어러블로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1. Controlling devices using facial expression identification and 클러스터 01 identification, token 1~3 recognition for assisting physically disabled 2. 접속된장치로부터의정보수신, 개인식별및데이터저장 / 교환을위한 LED, 블루투스, RFID/NFC 기술을이용한착용형전자액세서리 클러스터 02 wrist, algorithms 3~5 1. RSS-based localization algorithm for indoor patient tracking 2. Improvement of Wearable wrist Rehabilitation Device Using Flexible Pneumatic Cylinders 328
337 노인과장애인을위한근력보조웨어러블로봇 No 주요키워드연관도수치관련특허 / 논문제목 클러스터 03 클러스터 04 authenticati on, information body, temperature 3~4 6~8 1. Design of Wearable System for Detection and Analysis of Physiological information 2. Visualization of Activities-Related information for Supporting Active Aged Persons 1. Developing a health-enabling service system combining wearable device and personal health records for older adults 2. MediSuit: Wearable health monitoring system for elders and bed-ridden patients 클러스터 05 sensing, element 4~5 1. Multi-modal sensing for human activity recognition 2. Reflective sensing and conditioning system in ubiquitous home care for elderly people 1. The reliability of a real time wearable sensing device to measure 클러스터 06 locking, mechanism 3~4 vertical jump 2. Non-invasive Analyte Access and Sensing through Eccrine Sweat: Challenges and Outlook circa A Wearable Hip Assist Robot Can Improve Gait function and Cardiopulmonary Metabolic Efficiency in Elderly Adults 클러스터 07 function, control 7~8 2. Automated functional and Behavioral Health Assessment of Older Adults with Dementia 3. function control methods and systems for wearable electronic 클러스터 08 클러스터 09 bluetooth, device water, resistance 4~5 2~4 devices 1. A system of fall detection using a wearable device based on bluetooth communication 2. A paraeducator glove for counting disabled-child behaviors that incorporates a bluetooth Low Energy wireless link to a smart phone 1. Development and characteristic study of woven fabrics for intelligent diapers 2. MULTI-ROTOR SAFETY SHIELD 1. System and Method for Remote Asset Management 클러스터 10 radio, transmitter 4~6 2. Low cost and batteryless sensor-enabled radio frequency identification tag based approaches to identify patient bed entry and exit posture transitions 329
338 기술개발테마현황분석 (2) 요소기술도출 산업 시장분석, 기술 ( 특허 ) 분석, 전문가의견, 중소기업기술수요를바탕으로로드맵기획을 위한요소기술도출 [ 노인과장애인을위한근력보조웨어러블로봇분야요소기술도출 ] 분류요소기술출처 사용자의도파악기술 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술 상체기울어짐을통한보행의도추정기술 기술수요, 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 무저항구동제어기술 무저항정밀토크보조력생성기술 무저항구동기설계및제작기술 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 경량 / 소형화된고정밀구동장치설계기술 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전원, 센서, 구동기등이일체화된구동모듈양산기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 고정밀구동장치설계기술 다중센서를이용한지면반발력산출기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 최적보조력시뮬레이션기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 로봇의무게에따른관성측정기술 기술 / 시장분석 330
339 노인과장애인을위한근력보조웨어러블로봇 (3) 핵심요소기술선정 확정된요소기술을대상으로중소기업에적합한핵심요소기술선정 [ 노인과장애인을위한근력보조웨어러블로봇분야의핵심요소기술 ] 분류핵심요소기술개요 사용자의도파악기술 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술 상체기울어짐을통한보행의도추정기술 센서융합기술기반의사용자의도파악 센서융합기술기반의사용자의도파악 무저항구동제어기술 무저항정밀토크보조력생성기술 무저항구동기설계및제작기술 정밀힘보조력제공을위한무저항구동제어 정밀힘보조력제공을위한무저항구동제어 고정밀구동장치설계기술 경량 / 소형화된고정밀구동장치설계기술 전원, 센서, 구동기등이일체화된구동모듈양산기술 경량 / 소형화된일체형고정밀구동모듈제공 경량 / 소형화된일체형고정밀구동모듈제공 331

340 기술개발테마현황분석 나. 노인과장애인을위한근력보조웨어러블로봇기술로드맵 최종중소기업기술로드맵은기술 / 시장니즈, 연차별개발계획, 최종목표등을제시함으로써 중소기업의기술개발방향성을제시 332
341 노인과장애인을위한근력보조웨어러블로봇 다. 연구개발목표설정 핵심요소기술별최종목표는아래와같이기술요구사항과연차별개발목표로제시함 [ 노인과장애인을위한근력보조웨어러블로봇분야핵심요소기술연구목표 ] 분류핵심요소기술기술요구사항 연차별개발목표 1 차년도 2 차년도 3 차년도 최종목표 사용자의도파악기술 사용자의도파악을위한근전도 / 비전 / 족압 / 가속도등의센서융합기술 제작완성률 (%) 90% 이상 95% 이상 98% 이상 사용자의도파악을위한센서융합기술개발 상체기울어짐을통한보행의도추정기술 의도인지율 (%) 90% 이상 95% 이상 98% 이상 보행의도추정기술개발 무저항구동제어기술 무저항정밀토크보조력생성기술 무저항구동기설계및제작기술 반력감소율 (%) 설계완성률 (%) 90% 이상 90% 이상 95% 이상 95% 이상 98% 이상 98% 이상 정밀토크보조력생성기술개발 무저항구동기개발 고정밀구동장치설계기술 경량 / 소형화된고정밀구동장치설계기술 전원, 센서, 구동기등이일체화된구동모듈양산기술 설계완성률 (%) 제작완성률 (%) 90% 이상 90% 이상 95% 이상 95% 이상 98% 이상 98% 이상 고정밀구동장치설계기술개발 일체형구동모듈양산기술개발 333
342
343 기술개발테마현황분석 소셜로봇플랫폼 및서비스
344
345 소셜로봇플랫폼및서비스 정의및범위 소셜로봇은사람과사람이교류하듯자연스럽게사람과상호작용할수있는로봇으로서상대방의감정과의도를인지하고교류상황의사회적의미를해석하면서주어진역할에맞는사회적이고문화적인규범을따르는사회적행위를표현할수있는로봇을가리킴 소셜로봇은대화를가장기본적인상호작용수단으로삼으면서다양한사회적행위표현을위해눈짓, 표정, 손짓, 몸짓등다중모달리티를활용하며, 클라우드서비스와사물인터넷을연계하여원격데이터와정보를해석하거나장치를제어할수있음 소셜로봇은교육, 건강관리, 생활지원, 엔터테인먼트, 커뮤니케이션, 협업등다양한분야에적용가능한범용로봇으로서분야별고유기능수행에사회적교류능력을더함으로써분야별기능적목표의효과적인달성과로봇활용의지속성을확보하는데기여함정부지원정책 과학기술정보통신부는 4차산업혁명원천기술확보전략의일환으로 2017년디지털동반자, 비디오튜링테스트등인간-기계상호작용에핵심적인인공지능기술개발과제를출범하였고, 로봇과인공지능기술을융합한신규과제를출범하는등소셜로봇관련기술에대규모예산을지원중임 산업통상자원부는개인서비스와전문서비스영역에서시장성이높고상용화가능성이높은소셜로봇, 의료로봇, 재활로봇, 안전로봇, 이송로봇에대한전략적육성계획을추진중으로 2017년에소셜로봇산업원천기술개발과사업화를위한여러개의 R&D 과제를출범하였으며향후 3 ~ 5년에걸쳐매년약 100억원을투자할예정중소기업시장대응전략 강점 (Strength) ( 환경 ) 인공지능기술의관심과활용확산 ( 기술 ) 서비스로봇개발기술축적 ( 정책 ) 인공지능-로봇융합기술지원확대기회 (Opportunity) ( 환경 ) 인공지능-로봇융합필요성대두 ( 기술 ) 다양한인공지능기술적용용이함 ( 정책 ) 성공적서비스로봇산업화니즈 약점 (Weakness) ( 환경 ) 소셜로봇시장형성미비 ( 기술 ) 대화, 교류관련핵심원천기술미비 ( 정책 ) 로봇보급지원정책미비위협 (Threat) ( 환경 ) 글로벌업체의빠른시장선점 ( 기술 ) 선도업체와기술격차 ( 정책 ) 단발적 R&D 정책 중소기업의시장대응전략 기존제품과차별화요소가있는독창적소셜로봇플랫폼개발을통해독자적시장형성시도 클라우드기반인공지능서비스의적극적활용을통한빠르고반복적인프로토타이핑과제품평가 소셜로봇의핵심요소인소통과교감기술의확보를위한지속적인산학연협력시도 소셜로봇을플랫폼비즈니스화하기위한보급방식을채용하고응용개발과유통생태계구축
346 핵심요소기술로드맵
347 소셜로봇플랫폼및서비스 1. 개요 가. 정의및필요성 소셜로봇은대화를통한소통과감성교감이가능한로봇으로서대개의경우자율적으로판단하고행동하는로봇으로정의하지만사람이일부기능을직접조작하는반자동로봇도대화와감성교감이가능하다면소셜로봇의범위안에포함 소셜로봇은사람이나동물의외형과행동양식을모사한로봇으로타인과감정을공유하고감정적자극에반응하는등감성적교류가가능하고음성기반의대화를통한소통뿐아니라시선맞춤, 터치, 제스처등비언어적 (Non-Verbal) 교류수단을통해서도소통이가능한확장된교류능력을보유함 소셜로봇은적용분야와기능에따라교육기능을대체하거나교사를보조하는교육용로봇, 쌍방향게임과콘텐츠서비스, 공연등을통해사람에게즐거움을제공하는엔터테인먼트로봇, 고령자와장애인등사회적약자에게육체뿐아니라정서적인건강을유지할수있도록도움을제공하는케어로봇, 정보제공, 쇼핑도우미등공공장소나쇼핑센터등에서고객을돕는공공안내로봇등을포함 기존의서비스로봇은응용분야에따라특화된기능과외형을지녔으므로응용분야를기준으로한로봇제품분류가효과적이었으나소셜로봇은소통과교감능력을강화한범용로봇으로서필요에따라여러분야에적용이가능한방향으로발전하고있어응용분야에따른로봇분류체계의타당성이낮아지고있음. 향후소셜로봇의범위와분류체계를재정비할필요가있음 공급망관점에서소셜로봇을구성하는주요기술과제품은음성인식, TTS(Text-To-Speech), 대화관리, 영상이해기술, 감성로봇플랫폼, 통합로봇소프트웨어프레임워크, 소셜로봇콘텐츠와서비스제작과유통프레임워크, 클라우드로봇과 IoT 연계기술을포함 대화를통한소통을위한음성인식과대화관리기술및관련제품. 특히음성의속도, 크기, 리듬, 강세등비언어적음성요소를제어하여풍부한감정을표현할수있는감성 TTS(Text-To-Speech) 기술은소셜로봇의감성교감에중요한기술요소임 풍부한감성표현과비언어적의미전달에유리한로봇플랫폼은소셜로봇의중요한요소임. 다양한표정연출이가능한얼굴은감성표현의중요한수단으로서다수의액추에이터와인공근육으로만든로봇얼굴또는애니메이션을화면에출력하는가상아바타로구현할수있음. 로봇몸체는사람과유사한골격구조를갖는휴머노이드로봇형태로구현하여사람의다양한자세와제스처를표현하도록만들수도있고, 미국의지보 (Jibo) 와같이소수의단순한구동부를활용하여제한된개수의감성을효과적으로표현하도록만들수도있음 339
")
 의퍼햇 (Furhat) ] 다양한응용분야별소통시나리오를저작,")

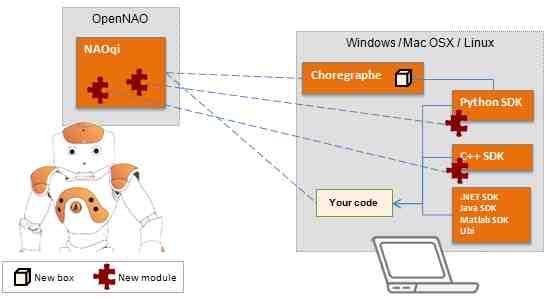
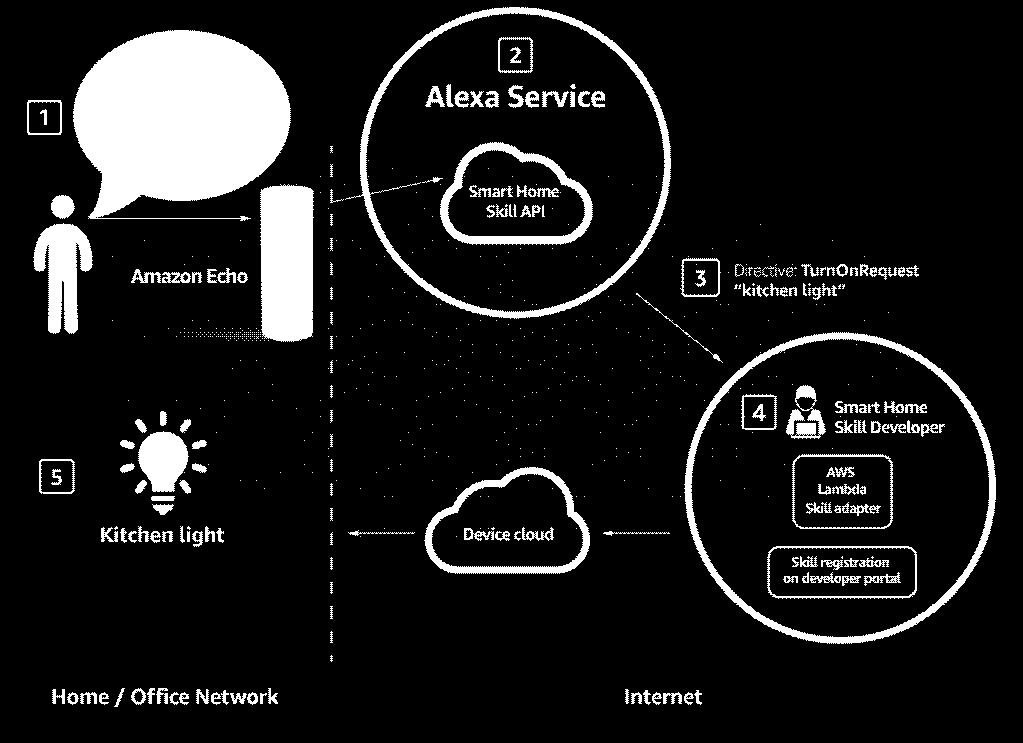
348 기술개발테마현황분석 [ 감정표현이가능한로봇얼굴들. 왼쪽부터생산기술연구원의 EVeR-4, 핸슨로보틱스 (Hanson Robotics) 의 소피아 (Sophia), 퓨처로봇의 FURo, 퍼햇로보틱스 (Furhat Robotics) 의퍼햇 (Furhat) ] 다양한응용분야별소통시나리오를저작, 관리, 실행하기위한로봇통합소프트웨어프레임워크는양질의콘텐츠확보와소셜로봇플랫폼의확산에필수적인요소임. 프레임워크는음성인식, 대화관리, 영상처리, 로봇제어를포함하는다수의기능모듈들을관리제어하는소셜로봇통합운영체제임 [ 나오 (Nao) 와페퍼 (Pepper) 의 SDK 구조 ] 소셜로봇은클라우드플랫폼에연결하여텍스트분석, 영상처리등자체처리가어려운고도의인공지능기능을활용함으로써보다지능적인상황인지와판단능력을보유할수있고, 클라우드를통해다른로봇과지식을공유함으로써빠르게성장할수있음 최근소셜로봇은음성기반대화인터페이스를기반으로 IoT 장치를원격제어할수있는기능을탑재하는사례가늘고있어향후스마트홈게이트웨이역할을주도할것으로예측 [ 아마존 (Amazon) 알렉사 (Alexa) 의클라우드와 IoT 연동스마트홈제어구조 ] 340

![[ 2017 년상반기기준전세계주요소셜로봇제품군 ] * 출처 : 유인오, 신동윤, "](/docs-images/93/112329278/images/349-2.jpg "감성, 교류, 교감을위한로봇, 소셜봇 \", 동아비즈니스리뷰 83 호, 2011.6.")
349 소셜로봇플랫폼및서비스 * 출처 : robot start inc., Communication Robot Industry Map, [ 2017 년상반기기준전세계주요소셜로봇제품군 ] * 출처 : 유인오, 신동윤, " 감성, 교류, 교감을위한로봇, 소셜봇 ", 동아비즈니스리뷰 83 호, [ 소셜로봇의주요구성기술요소 ] 341
350 기술개발테마현황분석 나. 범위 (1) 제품분류관점 소셜로봇은적용분야와기능에따라교육기능을대체하거나교사를보조하는교육용로봇, 쌍방향게임과콘텐츠서비스, 공연등을통해사람에게즐거움을제공하는엔터테인먼트로봇, 고령자와장애인등사회적약자에게육체뿐아니라정서적인건강을유지할수있도록도움을제공하는케어로봇, 정보제공, 쇼핑도우미등공공장소나쇼핑센터등에서고객을돕는공공안내로봇등을포함 교육용로봇은교사를대신하거나보조하는기능을수행하는로봇으로서교사의지도부담을줄여주는한편교육의효과를개선하는목적을달성하는데목적이있음. 학습자의교육과정에대한집중력과관심여부를관찰하고판단하여대응함으로써학습의지속성과교육내용의습득효과를향상 교육로봇은교육콘텐츠를로봇이주체가되어교육하는로봇으로서대표적인예로 SK텔레콤의스마트교육용로봇알버트와 KT와아이리버가공동개발한스마트교육용로봇키봇 (Kibot) 을들수있음 - 이들로봇은유아용교육콘텐츠를자체탑재하거나인터넷을통해입수하여실행하는콘텐츠재생기능중심으로동작하며간단한반응을통해쌍방향교육프로그램을제공 교육보조로봇은교사의교육활동을지원하는로봇으로서학생들이교육과정에더큰관심을갖도록유도하는매개체또는교육용부교재들을제공하는능동형멀티미디어단말로활용 - 로봇의소셜기능을좀더적극적으로활용하는경우로봇은학생들의교육참여도를측정하거나다툼, 따돌림등예외적상황을검출하여교사에게관련정보를제공하는등의보다적극적인학생지도기능을수행하기도함 교구재로봇은교육용로봇의범위에포함할수있으나로봇이대화를통한소통또는감성교감능력을보유하고있지않으므로소셜로봇의범위에포함하지는않음 엔터테인먼트로봇은사람의말과행동에반응하며사람의취미생활과여가활동에즐거움을주는서비스와콘텐츠를제공하는로봇 교육로봇, 안내로봇, 케어로봇등다양한제품군에포함되는로봇들은일반적으로간단한게임과영화, 음악등의콘텐츠서비스를제공하여사용자의흥미를유발하는데활용하므로큰범위에서엔터테인먼트로봇으로분류할수있는요소를포함 일본소니가 1999년에출시한아이보 (Aibo) 로봇은애완견로봇으로엔터테인먼트로봇의시초로볼수있으며이후파로 (Paro), 제니보 (Genibo) 등동물형애완로봇의출시가이어짐 완구로봇은압력, 빛등에단순반응하여움직이거나원격무선조정을통해작동되는데그쳤으나최근출시되는로봇들은보다복잡한소통능력과감정표현능력을보이고있음 - 미국앙키 (Anki) 의코즈모 (Cozmo) 는소형지게차형태의완구로봇으로서감정표현이가능한얼굴과다양한행동패턴을통해사용자와소통하며간단한놀이를진행할수있음 342
351 소셜로봇플랫폼및서비스 공연로봇은개인과소통하지않을뿐더러개인용서비스를제공하지도않지만문화활동과여가생활에즐거움을제공한다는점에서엔터테인먼트로봇으로분류가능 - 대다수기존공연로봇은원격조작또는탑승조작을통해사전에저작한콘텐츠를기계적으로반복재생하는데그치기때문에소셜로봇의범주에포함하기어렵지만, 최근음악을듣고음악의장단에맞추어발을구르고고개를끄덕이거나사람의피아노연주에자동으로반응하여실로폰과드럼을연주하는로봇들이소개된바있음 - 향후이러한로봇들이비언어적인영역에서사람과더친밀하고즉각적으로소통하고교감할수있게될것으로판단됨 케어로봇은사람의건강관리와정서안정을지원하는로봇으로서지속적인공존과소통을통해사용자의생활패턴과건강상태를파악하여건강상태를유지할수있는지원서비스를제공하고, 위급상황을감지하여긴급조치행위를실행하여대응 케어로봇은크게신체지원로봇, 생활지원로봇, 정서지원로봇으로구분 신체지원로봇은인간의신체건강을관리하고지원하는로봇들로이동보조로봇, 배변지원로봇, 목욕보조로봇등으로구분하며, 주로장애인이나고령자가혼자서수행하기힘든행위를보조하여이들이자율적으로독립생활을영위할수있도록지원함 이동보조로봇은고령화시대에노인과장애인이안전하게실내외목적지로이동할수있도록보조하는로봇으로서지능형워커 (Walker), 자동휠체어, 자율주행 1인용소형자동차등을포함 영국의 Care-O-Bot 3와같이거동이불편한사용자를위해여러가지물건을가져다주는일상생활행위지원로봇도신체지원로봇의범주에포함 생활지원로봇은사람의생활패턴을관찰하여간단한운동을제안하거나물마시기를제안하는등건강관리기능을수행 생활패턴관찰을위해사용자의스마트폰이나스마트와치등웨어러블장치로부터정보를입수하여활용 SK텔레콤의누구스피커나 Amazon의 Echo와같이음성기반소통이가능한탁상형장치도날씨정보를제공하거나일정을관리하고쇼핑을지원하는등생활지원기능을제공 정서지원로봇은사용자의정서안정을위한다양한기능을제공하는로봇임 - 로봇은사람의얼굴표정을관찰하고음성패턴을분석하여사람의감정을읽고적절히반응하는등감성적공감이있는소통을통해사용자가정서적으로고립되는현상을방지할수있음 - EU의다양한프로젝트에서는고령자들의외로움을해소할수있도록 SNS 서비스와연계하여지인들과지속적으로교류할수있도록지원하거나가족과정기적으로통화할수있도록영상통화서비스를제공하는등로봇이사용자와외부세계간의통로역할을맡도록하는기술개발이꾸준하게이어지고있음 343
![기술개발테마현황분석 [ 제품분류관점의기술범위 ] 기술개발테마 제품분류관점 교육로봇 세부기술](/docs-images/93/112329278/images/352-1.jpg "주로가정환경에서유아나어린이를대상으로온라인학습콘텐츠를이용하여교육프로그램을제공하는로봇 교육로봇")







352 기술개발테마현황분석 [ 제품분류관점의기술범위 ] 기술개발테마 제품분류관점 교육로봇 세부기술 주로가정환경에서유아나어린이를대상으로온라인학습콘텐츠를이용하여교육프로그램을제공하는로봇 교육로봇 교육보조로봇 학교, 공공기관또는가정에서학습콘텐츠를이용해교사를보조하거나사용자와의상호작용을통해서창의교육을가능하게해주는로봇으로서원격접속을통해원어민강의를제공하는목적의텔레프레즌스로봇도교육보조로봇의분류에포함 애완로봇 소니의 Aibo로대표되는동물형로봇으로애완동물의행동특성과정서반응을모사함으로써사람에게즐거움을제공함 엔터테인먼트로봇 완구로봇 의사소통을통해스무고개, 가위바위보, 블록쌓기등의게임을진행할수있을뿐아니라사람, 환경, 게임승부에반응하여감정을표현하는로봇 공연로봇 연극, 뮤지컬, 연주등각종퍼포먼스를수행하는로봇으로서공연진행상태와동료연기자의행동에능동적으로반응하여공연을진행하는로봇 소셜로봇 케어로봇 신체지원로봇 생활지원로봇 거동이불편한사람의이동을지원하거나씻기힘든사람의목욕을지원하는등의신체불편을해소하는역할을수행하는로봇으로서사용자의정확한신체적, 감정적상태를감지하고의사소통을통해사용자의필요를파악하여지원기능을극대화할수있는로봇 사용자의생활패턴을파악하고상황에따라필요한기능을제공하는로봇으로적절한시점에각종정보를검색하여보여주거나물건을찾아주는등의서비스를제공 정서지원로봇 사용자가고독함이나우울함에빠지지않고정신적으로건강한삶을영위할수있도록도와주는로봇 안내로봇 공공시설, 전시장등에서고객들과상호작용하며각종정보를제공하거나길을안내해주는등의서비스를제공하는로봇 안내로봇 쇼핑로봇 매장에서호객, 접객, 판매도우미등의역할을수행하는로봇으로고객의관심사항을파악하여적절한정보를제공하고구매동기를자극하는등고도의사회성표현이필요 동반자로봇 동반자로봇 개인의비서나친구, 가정의집사등의역할을수행하는로봇으로기능측면에서엔터테인먼트, 교육, 케어등복수의기능을제공할수있음. 향후대부분의소셜로봇은다양한부류의개인서비스를제공하는동반자로봇제품으로출시될것으로예상 [ 교육로봇 (KT 의키봇 2), 애완로봇 (Wowwee 의 CHiP), 완구로봇 (Anki 의 Cozmo), 케어로봇 ( 로보케어의 Silbot3), 생활지원로봇 (SKT 누구 ), 안내로봇 (LG 공항안내로봇 )), 동반자로봇 (IPL 의아이지니 ) ] 344
353 소셜로봇플랫폼및서비스 (2) 공급망관점 소셜로봇관련제품은공급망관점에따라소셜로봇요소부품, 소셜로봇플랫폼, 소셜 로봇운영체제, 소셜로봇콘텐츠 / 서비스개발환경, 소셜로봇콘텐츠 / 서비스, 소셜로봇 콘텐츠 / 서비스유통체계로구분 소셜로봇은다양한감정표현과유연한행동표현을위한다수의구동부와제어장치를포함 응용분야에따라큰차이가있으나더많은구동부와표현장치를보유할수록더다양한소통행동의실행과풍부한감정표현이가능하므로소셜로봇에유리함 대부분의소셜로봇은개인소비자를대상으로하므로상대적으로낮은가격대를형성할수있어야할뿐아니라유지보수의부담이적어야하므로저가이면서도내구성이우수한부품제작기술이필요함 소셜로봇플랫폼은인간친화적인외형디자인, 풍부한구동과표현능력, 우수한내구성, 높은유지보수성등양립하기어려운장점들을동시에제공해야함 사람과자연스럽게소통하고교감하는데있어로봇의외형은매우중요한요소이므로응용분야의특성과소비자들의실제반응을기반으로한인간친화적인외형디자인필요 소셜로봇의성공을위해판매후유지보수비용을최소화할필요가있으므로풍부한행동과감정표현을추구함과동시에내구성이높으면서도유지보수가용이한플랫폼구조설계가필수적 소셜로봇플랫폼의성패여부는콘텐츠와서비스가얼마나풍부한가에좌우되므로가능한 많은양질의로봇콘텐츠와서비스를확보하기위한전략은핵심성공요소임 소셜로봇운영체제는소셜로봇을기반으로한다양한콘텐츠와서비스를실행하고소셜로봇플랫폼의각종기능에접근하여로봇을제어할수있는인터페이스를제공 일본 SoftBank, 미국 Jibo 등은자사의소셜로봇들을위한독자적운영체제를개발하여활용하고있음 일본소프트뱅크는하드웨어플랫폼을싼값에보급하고거시적인응용생태계구축을통해수익의선순환을이루는플랫폼비즈니스모델을채용하여 Pepper를성공적으로보급하고있음 플랫폼운영체제는플랫폼을기반으로한응용개발의난이도와응용의유지보수비용을결정하는중요한요소이므로소셜로봇기반비즈니스의핵심요소임 나아가하나의플랫폼운영체제로다양한소셜로봇플랫폼을운영할수있는모델을제시한다면소셜로봇운영체제만으로독자적산업화도가능함 소셜로봇콘텐츠 / 서비스개발환경은소셜로봇운영체제위에서동작하는각종응용을 개발하기위한응용프로그래밍인터페이스와개발도구를포함하며소셜로봇산업생태계 활성화의핵심요소임 345
354 기술개발테마현황분석 응용프로그래밍인터페이스는소셜로봇의각종구동제어, 콘텐츠재생, 센서 (Sensor) 접근, 인식, 발화기능등을활용하여다양한상호작용응용을개발하는데필수적 다양한프로그래밍언어의지원, 비주얼프로그래밍도구와디버깅기능의지원, 시뮬레이터등응용프로그램개발의난이도를낮출수있는다양한지원은매우중요함 소셜로봇플랫폼제작사는 ROS(Robot Operating System) 와같이이미광범위한사용자커뮤니티가존재하는운영체제와호환성있는개발환경을제공함으로써더많은로봇응용개발자들을유인할수있음 소셜로봇기반콘텐츠와서비스의공급, 관리, 소비를위한소프트웨어인프라 Apple App Store, Google Play Store 와같은역할을수행하는유통체계로서소셜로봇플랫폼의 생태계활성화에중추적요소임 [ 공급망관점기술범위 ] 기술개발테마공급망관점세부기술 소셜로봇요소부품 내구성이높고유지보수가용이한소형의저가형로봇부품제작기술 소셜로봇플랫폼 인간친화적외형디자인, 다양한감정과행동표현, 높은유지보수성을제공하기위한모듈화된디자인등을특징으로하는하드웨어플랫폼 소셜로봇 소셜로봇운영체제 소셜로봇콘텐츠 / 서비스개발환경 소셜로봇콘텐츠 / 서비스 소셜로봇을기반으로한다양한콘텐츠와서비스를실행하고소셜로봇플랫폼의각종기능에접근하여로봇을제어할수있는인터페이스를제공하는소프트웨어플랫폼 소셜로봇을기반으로한다양한콘텐츠와서비스를제작하기위한개발언어, 도구와소프트웨어개발라이브러리 소셜로봇을기반으로한다양한콘텐츠와서비스 소셜로봇콘텐츠 / 서비스유통체계 소셜로봇기반콘텐츠와서비스를공급, 관리, 소비하는유통체계로서애플앱스토어나구글플레이스토어와같이소셜로봇응용의유통을담당하는소프트웨어인프라 346
355 소셜로봇플랫폼및서비스 2. 외부환경분석 가. 산업환경분석 (1) 산업의특징 로봇산업은기계, 금속, 반도체, 전기 / 전자, 컴퓨팅 SW, 센서, 통신등다양한사업을아우르는융합적인성격이강한산업 소셜로봇분야는인간과공존하며인간의필요와감정을파악하여자연스럽게소통하면서서비스를제공하는인공지능단말기술로발전 1인가구증가, 고령화등의사회변화에따라기존의인간노동력이필요하던가사노동, 육아, 간호와간병등에대한서비스를로봇이대체함으로써사회적비용을절감하는동시에삶의질을개선해야하는요구에부응할수있는산업분야 2014년 7월에발표된 가트너 사의 Hype Cycle for Emerging Technologies Maps 에의하면소셜로봇을포함하는스마트로봇기술은 5~10년이내에관련제품이안정화단계에도달하여지속적인시장창출이가능할것으로예측 소셜로봇과연계한 Connected Home, Smart Advisor, Wearable User Interface, Gesture Control, Speech Recognition 기술은 2~10년내안정화단계에접어들것으로예측 국내서비스로봇산업은다양성이확보된세계시장에비하여청소로봇과교육용로봇에편향되어있으며대기업중심으로상품화가진행됨 국내교육용로봇은 KT, SKT 등통신사를중심으로시장이형성되고있음 소셜로봇은교육용로봇, 엔터테인먼트로봇, 케어로봇, 공공안내로봇등으로구성, 그외에도다양한서비스산업군이미래수요시장을구성 소셜로봇분야는국내외시장에서교육용로봇이높은시장점유율을차지하고있으나향후케어로봇과공공안내로봇의비중이높아질것으로예측 소셜로봇산업육성을통해전방산업의기술경쟁력향상, 해외시장진출및시장규모확대기대 소셜로봇분야의전방산업육성을통해개인서비스용로봇수요견인효과및후방산업의투자유발효과기대 휴머노이드로봇의적용범위확대및플랫폼비즈니스모델로진화가능성 인간과감성소통이가능하며완성도높은동작이가능하면서가격경쟁력을갖춘로봇등장 소프트뱅크사의 페퍼 (Pepper) 는스마트폰생태계와같이원가이하로로봇을공급하고콘텐츠로수익을발생시키는플랫폼비즈니스모델로판매되고있으며현재운영되는앱은 200 여개이며, 타이머, 춤시연, 거짓말탐지, 운동프로그램, 피아노연주, 야구이야기, 영어배우기등엔터테인먼트와교육분야의앱이다수제공됨 347
356 기술개발테마현황분석 향후플랫폼의시장을견인할킬러어플리케이션의등장가능성이보임. 현재는일본에서만판매되고있으며중국어를탑재하여중국시장에출시예정 소프트뱅크사의 페퍼 (Pepper) 는 이모셔널엔진 (Emotional Engine) 을탑재한최초의감정인식로봇으로평가되고있으며, 사람의감정을인식하고이를반영해행동하며접객및제품홍보를할수있으며기존에감정을인식해스스로행동양식을만들며클라우드인공지능에기반한집단지성을이용하여복잡한감정을더빨리학습하고이에더정교하게반응 고령화시대를맞이하여노인의건강을관리하고생활활동을지원하기위한실버케어관련산업이성장할전망이며이에따라케어로봇산업규모도확장할것으로예측됨 로봇의엑츄에이터기술의발달은소형화가가능하여 20cm이하의스마트폰형태의로봇으로휴대가가능한수준으로발전 로봇하드웨어에스마트폰은네트워크기반인공지능을부여하여저렴한장난감수준의로봇이라도인간과상호작용이가능한수준의커뮤니케이션능력을부여 ICT 기술의발달은온오프믹스형태의교육콘텐츠시장이활성화될전망이며, 가상현실세계의구현, 아바타에의한간접체험등의기능을가진개념의교육로봇이등장할것임 교육용로봇시장은 O2O(Online-to-Offline) 시장의확장으로향후가상현실 (VR) 기술과결합을통해가상체험시장으로성장가능. 나아가로봇과사물을가상체험기술과융합한증강현실시장은더욱큰성장가능성이있음 348
357 소셜로봇플랫폼및서비스 (2) 산업의구조 교육분야에서소셜로봇은대화, 동작, 표정등을통해풍부한소통능력을통해능동적이고감성을교감하는학습지원이가능하고클라우드와 IoT 연계를통해광범위한온라인지능을활용할수있으므로지식기반사회의새로운교육수단으로활용될가능성이높음 공공교육영역은 1만 1천개의초, 중, 고등학교및 3만여개의유아보육기관에서활용될수있는거대한잠재시장을보유함. 세계시장규모가 5년내 20배이상증가할것으로예측 현재방과후학습을통한로봇활용소양교육, 로봇경진대회를통해교구로봇이활용되고있으며, 유치원을중심으로유아용교사보조로봇이일부활용 교육과정에교육용로봇을시범적용하여학습자의흥미증대와만족도향상에기여함을검증확인함 교육분야는소셜로봇의적용과사업화가능성이상대적으로 제품들은이미사업화에성공함 높은분야로서제한적으로일부 개인교육용로봇은저가플랫폼으로개발이가능하기때문에단기간내대량의로봇보급이가능하므로로봇시장활성화측면에서강점 교육용소셜로봇은후방산업으로교육서비스와연계되어일자리창출에기여하기적합하며우리나라는세계최고의 IT 인프라를바탕으로기술역량집중을통해중소기업의시장선점이용이할것으로기대 엔터테인먼트분야에서소셜로봇은인간감성교류확대, 인간친화적인콘텐츠제공등 1인가구가증가되는사회적인현상에부합하는수요적응형융합서비스가능 캐릭터로봇, 애완용로봇분야는사람과사물감지, 얼굴검출과인식, 음성인식, 언어이해기술을기반으로사람과의소통능력을극대화하는방향으로빠른제품화와기술혁신이이어질것으로예측 사람과장시간공존하면서개인의특성과선호를이해하고시의적절하게사람의필요를충족시킬수있는감성엔터테인먼트콘텐츠를제공하는데필요한기술과응용의개발에역량이집중되고있으며, 이를통해다방면으로인간의삶을지원함으로써사회현안문제를해결하는데기여할것으로기대 엔터테인먼트분야소셜로봇의후방산업은인지기능구현과다양한환경과상황대응에필요한센서등부품소재산업, 그리고로봇의구동을위한모터, 감속기등로봇관련기계부품산업, 로봇서비스개발을위한콘텐츠산업, 네트워크연결과 IoT 연계에필요한 IT 통신산업이주요산업임 전방산업은다목적교육서비스와연계된스마트교육, 공연, 게임및전시등문화산업 주요산업임 등이 349
358 기술개발테마현황분석 케어분야의소셜로봇은기계기술, IT, BT, 인간공학, 의료산업등의유기적인연계가필요한필요하며광범위한산업간융합이이루어짐 원천기술개발및제품화를위해정부의지속적인지원, 현장맞춤형가이드라인제공, 관련 R&D 공고등이복합적으로융합되어야상용화가가능하며, 중소 ᆞ벤처기업의인프라지원이무엇보다시급 로봇플랫폼과서비스기술, 케어로봇용체감형콘텐츠저작, 친환경로봇관련기술에대한특허점유가용이한분야이므로산업재산권확보에주력할필요성이다분한산업 로봇과관련부품, 유통, 로봇 SW 및서비스콘텐츠등을포함하는산업이며, 기술융합을통해타분야로파생되는산업 인간-로봇상호작용을위한동작의지신호추출, 신호처리, 센서융합기술, 인간-인간협력작업을위한상호원격분석기술, 감성기반상호작용기술, 시각 / 촉각 / 청각 / 강성기반인식식별기술등이핵심 지식집약적산업으로고부가가치를창출할수있으며, 원천기술확보에따라기술경쟁력, 글로벌시장점유도, 무역비중등이변화하는동향에영향력이높은산업 전방산업으로실버케어서비스산업, 라이프케어서비스산업, 지능형로봇산업, 원격의료서비스산업등이있으며, 후방산업으로는모터ᆞ 액추에이터산업, 반도체산업, BTᆞIT 산업, 디스플레이산업, 콘텐츠및서비스산업등이대표연관산업임 [ 소셜로봇의산업구조 ] 후방산업소셜로봇분야전방산업 온라인콘텐츠제작산업 센서및카메라모듈산업 액추에이터및모션제어기산업 H/W 플랫폼산업 클라우드컴퓨팅산업 IoT 장치산업 교육로봇, 교사보조로봇 엔터테인먼트로봇, 공연로봇, 완구로봇 교육산업 교육용로봇제조산업 네트워크기반스마트교육산업등 온라인게임산업 공연및전시문화산업 레져ᆞ스포츠산업등 모터ᆞ액추에이터산업 로봇매니퓰레이터산업 반도체산업 BT 관련산업 IT 관련산업 디스플레이산업 콘텐츠및서비스산업등 생활지원로봇, 실버 / 헬스케어로봇 실버케어서비스산업 헬스케어서비스산업 라이프케어서비스산업 원격의료서비스산업등 350
359 소셜로봇플랫폼및서비스 나. 시장환경분석 (1) 세계시장 LoupVentures 에따르면, 소셜로봇및엔터테인먼트로봇분야는 2016 년 11 억달러에서 연평균 7.3% 씩증가해 2021 년에는 16 억 9,000 만달러에달할전망 [ 소셜로봇및엔터테인먼트로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 세계시장 1,100 1,210 1,340 1,460 1,570 1, * 출처 : LoupVentures(2017) 소셜로봇분야주요품목의 2014년세계시장규모는 26억 74백만달러로 2018년까지연평균 19.93% 성장하여 45억 70백만달러규모를형성할것으로전망 세계시장의개인서비스용로봇분야에서가장큰시장은가사지원로봇으로 2014년기준 14억 55백만달러를형성하고있는것으로분석 그외 2014년기준으로개인서비스용로봇의품목별시장규모는개인엔터테인먼트로봇이 9억 90백만달러, 실버케어로봇 1억 10백만달러, 교육용로봇 1억 19백만달러규모의시장을형성 개인서비스용로봇분야주요품목의 2014년미국시장규모는 958백만달러로연평균 18.15% 성장하여 2018년에는 1,390백만달러규모를형성할것으로전망 미국시장의개인서비스용로봇분야에서가장큰시장은가사지원로봇으로 2014년기준 448백만달러를형성하고있는것으로분석 그외 2014년기준으로개인엔터테인먼트로봇 351백만달러, 교육용로봇 92백만달러, 실버케어로봇 68백만달러규모의시장형성 ( 단위 : 백만달러 ) 구분주요품목 CAGR 미국시장 [ 소셜로봇분야미국시장현황및전망 ] 교육용로봇 엔터테인먼트로봇 케어로봇 합계 * 출처 : World Robotics 2014 ( , IFR, International Federation of Robotics), 지능형로봇 2015 실행계획 ( , 관계부처합동 ), 국내외로봇산업동향 ( 한국로봇산업진흥원 ), Insight China: 중국산업용로봇시장보고서 ( , 한국무역협회 ), Trends in the Market for the Robot Industry in 2012 ( , Ministry of Economy, Trade and Industry of Japan) 등의자료를참고하여전망치추정 351

360 기술개발테마현황분석 국제로봇연맹 (IFR) 은소셜로봇을포함한서비스로봇전체세계시장규모를 2015년최대 90억달러로추정함. 이는전체로봇시장의 38% 로써매년 15 ~ 20% 의성장을거쳐 2020년이후에는산업용로봇시장을추월할것으로전망 서비스로봇중소셜및엔터테인먼트로봇은 2015년에 1.7백만대판매되어 10억달러규모의시장을형성한것으로추정 소셜및엔터테인먼트로봇은 2016년에 2.1백만대가판매되어약 25% 의성장을이루었으나로봇가격하락요인으로시장규모는 11억달러규모에머문것으로추정 소셜및엔터테인먼트로봇시장은지속적으로성장할것으로예상되나대량생산과보급으로인한로봇생산단가하락으로인해시장규모성장은더딜것으로예상함. 2025년에약 7.4백만대의소셜및엔터테인먼트로봇이판매되며시장규모는 20억달러에이를것으로예측 ( 출처 : Loup Ventures와 IFR, 2017) * 출처 : Loup Ventures, IFR, [ 소셜및엔터테인먼트로봇의세계시장전망 ] 352
361 소셜로봇플랫폼및서비스 (2) 국내시장 소셜로봇분야의 2016년국내시장규모는 1,032억원으로연평균 33.7% 성장하여 2021년에는 2,623억원규모로성장할것으로전망 2016년을기준으로교육용로봇은 686억원, 엔터테인먼트로봇은 147억원, 케어로봇은 199억원규모의시장을형성 [ 소셜로봇분야의국내시장규모및전망 ] ( 단위 : 억원, %) 구분 CAGR 교육용로봇 ,064 1,305 1, 엔터테인먼트로봇 케어로봇 합계 1,032 1,160 1,304 1,600 1,962 2, * 출처 : World Robotics 2014 ( , IFR, International Federation of Robotics), 지능형로봇 2015 실행계획 ( , 관계부처합동 ), 국내외로봇산업동향 ( 한국로봇산업진흥원 ), Insight China: 중국산업용로봇시장보고서 ( , 한국무역협회 ), Trends in the Market for the Robot Industry in 2012 ( , Ministry of Economy, Trade and Industry of Japan) 등의자료를참고하여전망치추정 353
362 기술개발테마현황분석 (3) 무역현황 소셜로봇을포함한개인서비스용로봇의총수출금액은 2012년 1,148억원, 2016년 788억원이며, 총수입금액은 2012년 95억원, 2016년 91억원으로수출과수입모두줄어들고있는것으로나타남 무역특화지수는 2012년 0.85에서 2016년 0.79로수출특화상태임 [ 개인서비스용로봇관련무역현황 ] ( 단위 : 억원, %) 구분 CAGR 수출금액 1,148 1, 수입금액 무역수지 1,053 1, 무역특화지수 * * 무역특화지수 = ( 상품의총수출액 - 총수입액 )/( 총수출액 + 총수입액 ) 으로산출되며, 지수가 0 인경우비교우위는중간정도이며, 1 이면완전수출특화상태를말함. 지수가 -1 이면완전수입특화상태로수출물량이전혀없을뿐만아니라수입만한다는뜻 * 출처 : 2014 로봇산업실태조사결과보고서, 2016 로봇산업실태조사결과보고서 ( 한국로봇산업협회 ) 354
363 소셜로봇플랫폼및서비스 다. 기술환경분석 (1) 기술개발트렌드 사람의행동, 표정, 말을이해하고사람이알아보기쉬운방식으로대화와행동을표현할수있는지능적이고인간친화적인상호작용기술개발이확산되고있음 소셜로봇은산업용로봇과달리사람과공존공생해야하므로자연스러운인간과의교류능력이필수적이며따라서첨단지능정보기술을기반으로한인간-로봇상호작용기술은 1가구 1로봇시대를앞당길수있는소셜로봇의주요경쟁력임 - 소셜로봇분야의핵심기술은개인서비스분야를넘어물류, 제조등사람과상호작용하는모든로봇분야에광범위하게적용될가능성이높으므로기술고도화가필수적임 사람과의상호작용을기반으로애착형성이가능한지능형서비스콘텐츠, 인간의생활과로봇을융합하여감정교감이가능한감성형콘텐츠등다양한어플리케이션서비스시장이크게성장할것으로예측되며이를기반으로인간과커뮤니케이션을극대화한다양한로봇제품들이빠르게발전할것으로예상 생체신호측정과해석을채용하여사람의상태를더잘이해하여반응하고건강관리등 부가적지원기능을제공하는기술개발확산 각종웨어러블센서와 IoT 장치를연동하여생리신호, 신경신호를측정함으로써사람의감정상태, 스트레스, 주의집중도, 심신안정도, 등의정신적상태를측정하고, 이를조절할수있도록지원하는소셜로봇응용에대한관심증대와더불어별도의센서장치없이 RGB 카메라를이용하여사람의맥박수, 체온등을측정할수있는신기술이등장하고있으며이를기반으로사람의감정과인지상태를보다정확히판단함으로써소셜로봇의교류능력을개선가능 터치인터페이스, 제스쳐인식, 음성인식을넘어뇌-컴퓨터인터페이스 (Brain-Computer Interface: BCI) 와같이로봇과소통할수있는새로운소통방식에대한연구가꾸준히이루어지고있음 - 특히뇌-컴퓨터인터페이스는신체나언어등다양한장애로인해로봇과소통이어려운사람들을위한소통방식으로서향후적용분야확대예상 EU는 FP7의 WEARHAP(Wearable Haptics for Humans and Robots) 프로젝트를통해, 다양한생리신경신호를기반으로인간과로봇간의사회적감성인터랙션을가능하게하는연구를진행함 고령화사회의도래와 1인 1가구의확산에따른사회구성원들의삶의질이저하되는현상은중요한사회현안이며, 소셜로봇은이를해결할수있는기술로대두되고있음 소셜로봇의소통능력과감성교감기능이사람의사회적소속감을증대하고외로움을해소한다는연구결과들이보고되고있으며, 이를기반으로독거노인과독신인구의증가로인해소외감, 고독감, 우울증에노출되는현상을완화할수있을것으로기대 웰빙, 웰니스라이프스타일추구등소비자의가치변화로인해단순건강, 미용등의심미적니즈와더불어안정성, 평화등정신적웰빙으로의수요가확산되는추세 개인주의적성향에따른감성화, 모바일화, 지능화, 개인화로인해사회전반적인메가트렌드가약화되고개인맞춤형마이크로트렌드로변화하고있는추세 355
364 기술개발테마현황분석 (2) 기술환경분석 과기정통부는 2018년을위시하여 4차산업혁명의유연한대응을위해로봇을포함하는 ICT 융합신산업기술개발에대한투자를강화하고있음 ( 출처 : 과학기술정보통신부 '18년도정부 R&D 투자방향 ) 기술성숙분야, 기구축인프라분야에대해서는민간역할강화를유도하고, 정부는핵심부가가치제고를통한역량내재화에집중 로봇분야에서는인공지능-로봇융합의핵심원천및공통기반기술에우선적으로투자하고, 미래형로봇등신규분야발굴확대 지원강화추진 인공지능 (AI) 과융합분야지원을확대하고, 향후성장가능성이높고로봇과의융합을통해시너지창출이가능한분야신규발굴 신규로봇분야개척을위한완전자유공모기초연구지원강화및다양한수요적용가능공통기반기술 ( 지능, 부품, 플랫폼, 표준화 ) 집중지원 산업별소관부처가수요를제기하고로봇주관부처가공통기반기술을지원하는부처간연계로봇개발지원강화 정부는소셜로봇을포함하는서비스로봇분야를시장창출이단기에가능하고민간 R&D 역량이중상위에속하는산업화유망분야로분류함 서비스로봇시장규모는 15 년에 68 억달러로, 전문서비스로봇 * 은전년대비 15%, 개인서비스 로봇 ** 은 4.7% 성장하였으며 16~19 년에는 455 억달러규모에다다를전망 * 의료, 농축산용필드, 국방분야등에서주로전문가에의해운용되는로봇 ** 가사, 건강, 교육등인간의생활범주에서불특정다수의일반인이사용하는로봇 최근인터넷쇼핑성장에따라물류로봇 ( 전문서비스 ) 성장이두드러지고, 다양한형태의개인용소셜 로봇 * 이시장에소개 * 개인서비스로봇유형별시장규모 : 15 년 10 억달러 ( 출처 : World Robotics 2016, IFR) 최고기술국인미국대비전문서비스로봇은약 75%, 인식 판단지능공통기술은약 78% (2.4 년 ) 로격차가존재하나, 개인서비스로봇의기술수준은최고기술국 ( 일본 ) 대비약 86% 수준 ( 출처 : 2015 산업기술수준보고서, KIAT) 정부는서비스로봇분야의기술중선진국대비기술격차가작은분야는민간이주도하도록하고, 로봇지능고도화를위한원천기술및신제품사업화촉진정책을추진 로봇과인공지능의융합을통해인간과대화, 얼굴 / 물체인식, 자기학습등필수요소기술을개발하고, 공통적용가능한소프트웨어플랫폼개발을집중육성 서비스로봇사용자를위한안전기준 ( 신체보호등 ), 기능인정과실증평가등신뢰성확보를위한기술개발과표준화, 규격화를위한테스트베드구축을통해글로벌시장진출기반조성추진 356

365 소셜로봇플랫폼및서비스 산업통상자원부는 16 년 11 월 15 일범부처로봇산업정책협의회가의결한 로봇산업 발전방안 의후속조치중하나로 대한민국로봇산업기술로드맵 을수립하여향후 R&D 전략에반영하기로함 로봇산업기술로드맵 은주관부처인산업부와 6 대로봇연구기관 *, 대학, 수요기업등각계전문가 80 여명이분야별분과위원회 ** 운영을통해추진작성함 * 과학기술연구원, 기계연구원, 로봇융합연구원, 전자부품연구원, 생산기술연구원, 전자통신연구원 ** 제조, 물류 농업, 의료 재활, 안전, 개인서비스, 부품, SW 지능, 표준화등 8 개분과 로봇산업기술로드맵 은로봇핵심기술을 8 대핵심분야 로구분하고, 제조, 물류 농업, 의료 재활, 안전, 개인서비스의 5 개제품기술과부품, SW 지능, 표준화의 3 개기반기술을제시함 - 이중개인서비스로봇은소셜로봇플랫폼과서비스기술을망라하는기술분야로정의하고있음 산업통상자원부는 대한민국로봇산업기술로드맵 에서개인서비스로봇을 일상생활속에서가사업무를돕거나신체적또는심리적으로도움을주거나여가또는교육적목적을충족시키는로봇 으로규정하고있으며그핵심제품과기술요소로소셜로봇플랫폼및서비스기술을포함함 개인서비스로봇중가정용로봇의핵심기술개발목표로 인간과대화및정서적교감이가능하고심부름등가사일을도울수있는로봇기술개발 을설정하고이러한목표달성을위한연구개발과제추진을제안함 [ 산업통상자원부가정의한 5 대로봇제품기술 ] 정부는 2016년말부터 2017년에걸쳐사람과정서적으로교감하면서다양한지원서비스를제공할수있는디지털동반자와로봇을실현하기위한각종인공지능원천기술과소셜로봇핵심, 응용기술개발과제를출범하여향후 3~5년에걸쳐매년약 300억원의예산을투자할예정임 357
366 기술개발테마현황분석 [ 소셜로봇관련정부 R&D 현황 ] 분류 R&D 과제 추정지원규모 소셜로봇관련성 고령사회에대응하기위한실환경휴먼케어로봇기술개발 ( 17 ~ 21) 연 60 억 소셜로봇핵심기술 고령자삶의질향상을위한보급형디지털컴패니언개발 ( 17 ~ 20) 연 10 억 소셜로봇응용기술 자율지능디지털동반자 (Autonomous Digital Companion) 기술연구 ( 16~ 20) 과학기술정보통신부 (1세부) 자율지능디지털동반자프레임워크및응용연구개발 (2세부) 자율지능동반자를위한적응형기계학습기술연구개발 (3세부) 사용자의의도와맥락을이해하는지능형인터랙션기술연구개발 (4세부) 상대방의감성을추론, 판단하여그에맞추어대화하고대응할수있는감성지능기술연구개발 연 150 억 인간 - 기계상호작용을위한인공지능원천기술 비디오튜링테스트 (Video Turing Test): 인간수준의비디오이해지능및 검증기술개발 ( 17~ 21) (1세부) 비디오튜링테스트를통과할수준의비디오스토리이해기반의질의응답기술개발 (2세부) 비디오이해를위한이벤트-상황지식체계학습및이벤트인식 / 관계추론기술개발 연 42 억 상황이해를위한인공지능원천기술 (3 세부 ) 비디오이해를위한데이터수집및보정자동화시스템개발 휴먼케어를위한휴머노이드형서비스로봇및사회적인간로봇상호작용 원천기술개발 ( 17~ 21) (1 세부 ) 사회적상호작용이가능한휴머노이드형소셜로봇을위한원천기술 개발 (2세부) 서비스로봇의사회적상호작용을위한소셜로봇지능원천기술개발 연 45 억 소셜로봇핵심기술 산업통상자원부 (3세부) 생활 환경에서 사회성을 반영한 서비스 로봇의 물체 다루기 원천기술개발 가정용소셜로봇및서비스시스템개발 ( 17~ 19) 연 10 억 소셜로봇응용기술 로봇지능을향상시키는로봇상호작용원천기술개발 ( 17~ 21) 연 3 억 소셜로봇핵심기술 인공지능을활용한에듀테인먼트분야의로봇화기술개발 ( 17~ 21) 연 3 억 소셜로봇응용기술 358
367 소셜로봇플랫폼및서비스 3. 기업분석 가. 주요기업비교 소니는 1999년강아지로봇 AIBO를발매 발매당시 2,500달러의비싼금액이었지만 2006년까지일본, 미국, 유럽시장에 15만대이상판매됨 출시당시에는인기가높았으나, 비싼가격때문에수요층확대에실패하고 2006년사업철수 2014년부터는 A/S도중지했으며폐기하는 AIBO들이생겨나자주인들은이들에대한합동장례식을치렀으며, 전자제품이아닌감정적교류가이뤄지는객체로인식 소프트뱅크는 2015 년소셜로봇 Pepper 를발매 인간과동일한언어를구사하고제스처를취하는등진일보한기능을제공 발매이후은행, 쇼핑몰등다양한환경에적용되었으며, 1 만대이상보급됨 퓨처로봇은음성인식, 감정분석으로사람의표정과말에대응하여, 응답하는 퓨로-아이홈 (FURo-i Home) 로봇을개발함 아직까지는비싼비용과기능의한계등으로소셜로봇활용은광고및홍보에국한되어사용되고있지만, 지속적인개발과학생과소셜로봇간의협동을통해학생의학습성취도나참여도를높이고자교육등적용분야확대가고려되고있음 미국 MIT 미디어랩 Cynthia Breazeal 박사는소셜로봇 Jibo를크라우드펀딩을통해 371만달러를모금했고, 올해상반기정식판매예정이었지만일정이지연되어 2017년 9월에서야겨우발매됨 Jibo는 255가지감정표현개발에주력했으며, Jibo가보여준다양한서비스와저렴한가격, 자연스런움직임은전세계사람들의관심을끌었음 프랑스의로봇스타트업 Blue Frog Robotics 소셜로봇 Buddy를개발하여크라우드펀딩인디고고에서 61만달러를모금했고, 이로봇역시많은사람들의관심을받고있음 개인비서, 집안감시, 요리법등의정보제공, 아이들의놀이상대, 영상통화등다양한기능을보유함 개별판매하는로봇팔을장착하면프로젝터기능을추가로사용할수있음 버디는특히아동과상호작용하며성장하는로봇으로장난감의위치에서벗어나아동의데이터를학습해그에맞는성격이부여되고, 나이와관심사에맞춰함께성장함 359
368 기술개발테마현황분석 [ 대표적인해외소셜로봇제품비교 ] 구분 Pepper( 일본 ) Jibo( 미국 ) Buddy( 프랑스 ) 컨셉 어눌하지만대화가능한휴머노이드로봇 사람과감정교류기반으로편의기능제공 Jibo 보다인간을닮고, Pepper 보다는간결함 특징 머리와팔을인간과같은형상과감정인식기반의대화를통해의인화시도 몸통과머리의자연스러운움직임과디스플레이를통해의인화시도 만화캐릭터같은큰눈과작은입으로귀여운표정을가짐 가격 1,658 달러 ( 약 200 만원 ) 보험료 / 서비스료등실제는 2 년약정에 2 천만원선 749 달러 ( 약 90 만원 ) 649 달러 ( 약 78 만원 ) 개발사일본 Softbank 미국 Jibo 프랑스 Blue Frog Robotics 높이 / 무게 120cm / 28kg 27cm / 2.7kg 56cm / 5kg 움직임 바퀴가장착돼자유로운이동가능 데스크고정형으로이동불가 전면 2 개의큰바퀴, 후면 1 개바퀴로이동 외관 * 출처 : 소셜로봇기술동향과산업전망, 한국산업기술평가관리원, 딥러닝등인공지능이주도하는최근 IT Trend에의하여 ' 로봇 ' 에대한일반대중의이해와수용도가점차높아지고있으며, 소셜로봇에있어서기술적특징은 Interface/UX 영역이로봇고유영역으로남고, AI는범용화기술이될가능성이높으나 Interface와 AI의조화가핵심경쟁력이될가능성이큼 즉로봇이가지고있는지식을자연스럽게말이나행동으로옮겨야하는데이를사람과같이맥락에맞는자연스런행동을접목시키는것이중요한기술이될것임 한국과학기술연구원 (KIST) 지능로봇사업단 메로S(MERO-S) 는음성인식, 얼굴인식, 감성표현아바타기술들을확보해사람과감성적교류가가능함 영어보조교사잉키와메로는 2010년미국타임지선정세계 50대발명품에선정 노인치매예방로봇실벗은용인실버타운 삼성노블카운티 에서치매환자들의치료와활용되었으며, 경북대학교의과대학에서는자폐아이들의치료에활용되기시작하였고, 노인요양기관 병원 학교등에서구입해활용하고있지만판매가활발하진않음 360
369 소셜로봇플랫폼및서비스 [ 대표적인해외소셜로봇제품비교 ] 제공기능설명 Pepper Jibo Buddy 개인비서 생일등일정을음성으로미리알려줌, 음식주문 O O X 좋아하는음악플레이 X X O 놀이친구 아이에게동화를읽어주는스토리텔링 O O O 핸즈프리통화, 메시지알림 / 읽어주기 (TTS) X O O 소통수단 영상통화, 화자의위치를인식해서스스로방향전환 X O X 로봇간통신 O X O 스마트홈허브 전등등스마트디바이스 On/Off 제어 X O O 감정인식 사람의감정을인지하고, 이를바탕으로적절하게대화함 O X X 음성 / 얼굴인식, 대화 음성명령을이해하고, 명령내린사람의얼굴을인식함 간단한대화를통해명령수행 O O O 자가학습 가족구성원의얼굴과취향을학습 O O O 홈보안 SW 확장성 집안을순찰하면서전등, 출입문등을감시, 원격제어 O X O 추락이나비정상적인정지상태감시 X X O SDK 를이용한기능확장 O O O * 출처 : 소셜로봇기술동향과산업전망, 한국산업기술평가관리원,
370 기술개발테마현황분석 국내중소기업사례 디에스티로봇은 직각좌표로봇부터 수평다관절 로봇 등의 제조업 로봇뿐만 아니라, 모바일 플랫폼용소형로봇, 애완로봇, 소셜로봇, 교육용로봇등제조판매 로보로보는로봇을이용한코딩교육전문기업으로유아를위한블록로봇부터세밀한코딩이 가능한대회용로봇까지제조판매 로보케어는 어린이 영어 교육, 노인을 위한 서비스에 적합한 로봇 ( 실벗-3), 감성적 인터랙션이 가능한 로봇 ( 메로 ), 인간과의상호작용을극대화한휴머노이드로봇 ( 키보 ) 등을제조판매 아이피엘 (IPL) 은 레드닷디자인 (2016) Best winner of the industrial을 수상하였고, 외부에서 집안의기기들을제어하는스마트홈허브로봇 ( 아이지니 ) 개발판매 코어벨이자체개발한농업용구분적재, 이송로봇은레이저센서를통해주변의모든지형지물을 인식함 퓨처로봇은감성표현이가능한 AI 감성로봇 ' 퓨로 (Furo)' 등을개발하고, 안내로봇상용화에 이어 최근 핀테크 기반 커머스봇 ' 퓨로-데스크 ' 를 출시함. 최근 초정밀 글로벌 금형전문회사인 신흥정밀과투자협력으로대규모로봇생산체제를구축함 한울로보틱스는국내최초의휴머노이드형안내로봇제품을보유하고있으며, 로보월드 2016에서 하이브리드비행로봇을선보임. 이비행로봇은하이브리드구조를채택하고있어에너지효율을 극대화함 [ 주요중소기업비교 ] ( 단위 : 백만원,%) 국내업체자산총계매출액 매출액증가율 영업이익율당기순이익율 R&D 집중도 디에스티로봇 41,773 44, 로보로보 15,929 10, 로보케어 1, 아이피엘 (IPL) 1, , , 코어벨 4, 퓨처로봇 4,110 1,
371 소셜로봇플랫폼및서비스 4. 기술개발현황 가. 기술개발이슈 음성인식기술 애플은자사스마트폰및태블릿에시리를도입해인터넷검색, 일정, 주소록등사용자의상황에맞는기능을서비스 - 입력된소리의정확도를높이기위해문장의맥락을고려 마이크로소프트는음성인식비서기능인코타나를개발 구글은입력된음성데이터를클라우드서버로전송하고서버에서인식을수행한후에그결과를사용자기기로전송 - 애플시리와코타나보다검색량과정확도가높은편 삼성전자는스마트폰과태블릿에서 S보이스서비스도입 옥션은 2015년초부터음성으로상품을검색해주는서비스실시 영상및행동인식기술 마이크로소프트에서는카메라와레이저스캔장비를활용해사람의동작및제스처를인식하는키넥트개발 구글은딥러닝기법을활용해동영상에서원하는객체를인식하는기술개발 년 1천만개의유튜브동영상속에서고양이이미지를 74.8% 의정확도로인식 페이스북은사람의얼굴을인식하는프로그램개발 년개발한딥페이스의정확도는 97.25% 로인간의인식능력과거의비슷한정도 로봇감성표현기술 KAIST는프리미티브기반의제스처생성및감성모델기반의감정표현기술연구 DST로봇은가정용애완서비스로봇을개발 - 15개의모터로구성된관절구동방식의 4족보행로봇으로다양한감정모션과지능적행동패턴수행가능 퓨처로봇은음성과표정을통해기쁨, 만족, 실망등다양한감성표현기능개발 - 감성표현을위해입모양, 허리움직임, 상황에따른부위별 LED 표현, 립싱크표현기능구현 지식추론기술 IBM은인공지능슈퍼컴퓨터인 Watson을개발 - 구조화된자료뿐만아니라비구조화된자료까지인식할수있으며, 의료, 과학, 금융등다양한분야에서사용되고있음 년 2월제퍼디퀴즈쇼에서사상최대우승자인브래드러터, 가장긴챔피언십기록보유자켄제닝스와대결해우승 363
372 기술개발테마현황분석 HRI 기술 일본오사카대학의이시구로교수팀은인간을닮은안드로이드로봇 Replee 시리즈를개발 일본산업기술총합연구소에서는휴머노이드 HRP 시리즈를개발해사람같은움직임을보이고, 감정을표현하며, 협동작업을수행할수있는연구진행 일본혼다는제스처표현다양화를위한모션튜닝, 감성상태에따른제스처생성, 발화문장에따른제스처매핑을수행할수있는로봇인아시모를개발 미국 Hanson Robotics는자연스러운얼굴표정구현과 HRI 기술을통해인간형얼굴로봇개발 미국 USC는사람의동작을그대로모사하면서사람처럼움직일수있는다자유도로봇시스템 Sparky와얼굴표정과몸동작을통한표현연구를위한 Bandit 로봇플랫폼개발 MIT 미디어랩에서는자기동기부여를통해내부동인을발현하고, 환경정보로부터다양한감정적대응을효과적으로수행할수있는로봇을개발 지식추론및 HRI 복잡화기술 EU는 FP6 COGNIRON(The Cognitive Robot Companion) 프로젝트로인간과공존할수있는인지로봇개발중 - 일상생활에서사람과함께살아가며상황인지, 표현, 추론, 학습능력을통합구현해사람에게봉사할수있는동반자로봇을개발하는것이목표 일본와세다대의 Humanoid Robotics Institute에서는 Physical and Psychological 메커니즘을결합한휴머노이드로봇개발중 인공지능과로봇융합기술 R&D 촉진 국내기업의세계적인소셜로봇플랫폼개발필요 소셜로봇은서비스플랫폼의일부이므로일단시장장악이이루어지고나면바꾸기매우어려움 아직소셜로봇은다른제품도시장형성초기단계에있으므로더늦기전에한국기업도세계적인소셜로봇플랫폼을목표로개발하여시장에진입해야함 인공지능융합기술및 HRI R&D 장려 앞으로다양한형태의소셜로봇뿐만아니라인공지능과융합된로봇시스템이개발되고적용될것 이러한분야는한국의미래성장동력이될산업이므로이에대해활발히 R&D를지원해야함 HRI(Human Robot Interaction) 에대한연구개발이확대되어야함 - 소셜로봇은 HRI가핵심성능인로봇이며, 특히 Social HRI에대한다양한연구개발이뒷받침되어야향후더욱경쟁력있는제품개발로이어질수있음 364
373 소셜로봇플랫폼및서비스 산학연협력체계강화 기업은시장요구분석과제품개발을, 대학과연구소는핵심 / 원천기술개발을담당함 미국의 Jibo는관련기술개발을진행하던대학 / 연구소에서제품을개발하는기업으로신속히기술이연결됨 국내로봇기술을가진기업은여럿있으나대부분규모가영세하여자체적으로인공지능등핵심 / 원천기술의수준은낮은수준 대학과연구소가보유하고있는인공지능기술이제품에보다쉽게녹아들수있도록산학연이서로의역할을잘나누어협업해야뒤처진기술을따라가며효과적으로시장에침투할수있는제품개발에성공할수있음 빅데이터접근성개선 인공지능기술고도화를위한빅데이터접근성개선이필요함 소셜로봇은로봇기술보다도인공지능기술이더욱비중이높은로봇분야 인공지능연구에는학습에필요한빅데이터확보가매우중요한데, 구글, 페이스북같은글로벌 IT 기업이확보할수있는데이터규모에비교하면국내에서확보할수있는데이터는너무적은상황 국내인공지능연구자대부분이빅데이터확보의어려움을호소하고있으므로, 공공질서를해치지않는범위안에서공공데이터의제공등연구개발을촉진할지원책을강구해야함 공공기관의초기수요확대지원 소셜로봇의시장규모확대에공공수요활용함 국내는작은시장규모로인해미국, 일본, 유럽, 중국에비해초기시장형성에특히애로가많음. 소셜로봇도공공기관의대외창구 ( 우정사업본부, 정부및지자체민원창구등 ) 또는교육시설같은공공수요를활용하여초기시장규모확대를지원하는정책을펼칠필요있음 365
374 기술개발테마현황분석 나. 특허동향분석 소셜로봇플랫폼및서비스특허상주요기술 주요기술 소셜로봇플랫폼및서비스와관련된기술은소셜로봇플랫폼제작기술개발, 상황인식기술 개발, 멀티모달인간 - 로봇상호작용, 통합운영소프트웨어프레임워크, 서비스와콘텐츠제작 기술로구분됨 분류 요소기술 설명 하드웨어장치, 아바타, 프로젝션등다양한접근방법을기반으로사용자, 소셜로봇플랫폼제작기술개발 상황인식기술개발 감성표현을위한로봇얼굴 유연한제스처와자세표현 감성형로봇플랫폼디자인과 시스템통합 사용자감정인식기술 원거리음성인식기술 사용자행동인식기술 환경및상호작용상황에따라풍부한감정을표현할수있는로봇얼굴의 디자인, 제작및제어기술 고개움직임, 팔동작, 몸체자세등상호작용상황에적합한다양한자세와 동작을유연하고효율적으로표현할수있는하드웨어제작및제어기술 사용자의거부감을최소화하고감성을극대화할수있는외형디자인 방법론과소셜로봇의풍부한인식과표현능력을확보하기위한다수의 센서와액추에이터를로봇플랫폼안에효과적으로실장하는기술 영상과음성신호를기반으로표정, 말투, 음운등의정보를검출하여 사용자의감정을인식하는기술 사용자와일정거리를유지하는로봇에장착된마이크를통한음성인식 성공율을개선하는기술 지식기반인간- 로봇상호작용 사용자의제스처, 자세, 활동을인식하는기술지능체계구축기술 상호작용상황의의미를해석하고대응하기위해필요한지식저작과활용기술 멀티모달인간 - 로봇상호작용 통합운영소프트웨어프레임워크 서비스와콘텐츠제작기술 로봇의멀티모달표현기능을활용하는대화기반의상호작용시나리오를 멀티모달대화시나리오저작효율적으로저작할수있는언어체계와저작도구기술 저작된시나리오를해석하여상호작용상황에적합한로봇행위를결정하고 멀티모달상호작용실행엔진실행하는실행엔진기술기술 상황변화에따라감정상태를제어하는로봇감정모델과이를기반으로 멀티모달감정표현기술로봇의다양한표현메카니즘을융합하여효과적으로감정을표현하는기술 사용자와의상호작용을위한 사용자와의커뮤니케이션시사용자의도에맞는언어생성및프로세스, 대화및의사소통기술복합지식의인지과정에따른서비스레벨의사용자의도파악기술 소셜로봇의상호작용능력을실현하는데필요한다수의 SW 모듈들을대상으로연동체계, 처리흐름, 자원관리등을통합제어하는기술 멀티모달인식제어통합기술 원격지에서로봇의상태를모니터링하고, 인식제어기능중일부또는전부를 원격모니터링과제어기술사람이원격수행함으로써소셜로봇의실환경적용성능을최적화하는기술 IoT 및클라우드서비스연동 로봇자체플랫폼뿐아니라환경내 IoT 장치와클라우드로부터정보를기술획득하여활용하고제어함으로써서비스의양과질을향상하고, 클라우드를통해로봇간의정보공유와협업을이룩하는연동기술 단일응용서비스와콘텐츠를다양한소셜로봇플랫폼에탑재하여실행하기 서비스와콘텐츠제작모델위해필요한저작, 해석, 실행표준모델의설계와참조시스템개발기술표준화기술 소셜로봇서비스와콘텐츠를공유하고유통할수있는로봇특화생태계 콘텐츠공유관리유통체계플랫폼구축기술 366
375 소셜로봇플랫폼및서비스 세부분야별특허동향 주요기술별국가별특허동향 소셜로봇플랫폼및서비스에대한요소기술별주요국가별특허정보데이터입수하여분석함 분류요소기술한국미국일본유럽계 소셜로봇플랫폼제작기술 상황인식기술개발 감성표현을위한로봇얼굴 유연한제스처와자세표현 감성형로봇플랫폼디자인과 시스템통합 사용자감정인식기술 원거리음성인식기술 사용자행동인식기술 지식기반인간 - 로봇상호작용 지능체계구축기술 멀티모달대화시나리오저작기술 , 멀티모달인간 - 로봇상호작용 멀티모달상호작용실행엔진기술 멀티모달감정표현기술 사용자와의상호작용을위한 대화및의사소통기술 통합운영소프트웨어프레임워크 멀티모달인식제어통합기술 원격모니터링과제어기술 IoT 및클라우드서비스연동기술 서비스와콘텐츠제작기술 서비스와콘텐츠제작모델표준화 기술 콘텐츠공유관리유통체계 합계 839 1, ,100 국가별요소기술별특허동향에서는소셜로봇플랫폼제작기술이다른기술들에비해특허출원건수가가장많았으며, 그다음으로는통합운영소프트웨어프레임워크, 멀티모달인간-로봇상호작용기술이출원건수가많았음 소셜로봇플랫폼제작기술은미국이가장많은출원량을보유하고잇으며, 한국이상대적으로적은출원량을보유하고있고, 이외에다른모든요소기술에서도미국이가장많은출원량을보유하고있고일본이상대적으로적은출원량을보유하고있음 이에따라, 소셜로봇플랫폼및서비스에대한기술은미국에서가장활발한연구가이루어지고있음을알수있음 367
376 기술개발테마현황분석 주요기술별출원인동향 세부분야요소기술기술집중도주요출원인국내특허동향 소셜로봇플랫폼제작기술개발 감성표현을위한로봇얼굴 유연한제스처와자세표현 감성형로봇플랫폼디자인과시스템통합 SONY Honda Motor NIPPON TELEGR& TELEPH 삼성전자 한국전자통신연구원 한국과학기술원 한국과학기술연구원 상황인식기술개발 사용자감정인식기술 원거리음성인식기술 사용자행동인식기술 지식기반인간- 로봇상호작용지능체계구축기술 Sony YAMAHA MOTOR SOFTBANK ROBOTICS EUROPE 삼성전자 중앙대학교 엘지전자 대학교및공공기관 멀티모달대화시나리오 저작기술 멀티모달인간 - 로봇상호작용 멀티모달상호작용실행엔진기술 멀티모달감정표현기술 SONY KUKA Systems Honda Motor 한국전자통신연구원 숭실대학교 한국과학기술연구원 사용자와의상호작용을위한 대화및의사소통기술 Honda Motor 통합운영소프트웨어프레임워크 멀티모달인식제어통합기술 원격모니터링과제어기술 IoT 및 클라우드 서비스 연동기술 SONY ADVANCED TELECOMMUNIC ATION RESEARCH 한국전자통신연구원 한국과학기술원 한국과학기술연구원 INSTITUTE INTERNATIONAL 서비스와콘텐츠제작기술 서비스와콘텐츠제작모델표준화기술 콘텐츠공유관리유통체계 FUTURE ROBOT Sony 한국전자통신연구원 : 1,000 건이상, : 750~999 건, : 500~749 건, : 250~499 건, : 250 건미만 소셜로봇플랫폼제작기술개발주요출원인동향 소셜로봇플랫폼제작기술에서는 SONY 가가장많은특허를보유하고있으며, 국내에서는대학교, 공공연구기관을중심으로소셜로봇플랫폼제작기술에대한연구개발이이루어지고있음 상황인식기술개발주요출원인동향 상황인식기술개발기술에서는 SONY 가가장많은특허를보유하고있으며, 국내에서는대학교, 공공연구기관을중심으로상황인식기술개발기술에대한연구개발이이루어지고있음 368
377 소셜로봇플랫폼및서비스 멀티모달인간 - 로봇상호작용주요출원인동향 멀티모달인간 - 로봇상호작용기술에서는 SONY 가가장많은특허를보유하고있으며, 국내에서는대학교, 공공연구기관을중심으로멀티모달인간 - 로봇상호작용기술에대한연구개발이이루어지고있음 통합운영소프트웨어프레임워크주요출원인동향 통합운영소프트웨어프레임워크기술에서는 Honda Motor가가장많은특허를보유하고있으며, 국내에서는대학교, 공공연구기관을중심으로통합운영소프트웨어프레임워크기술에대한연구개발이이루어지고있음 서비스와콘텐츠제작기술주요출원인동향 서비스와콘텐츠제작기술에서는 FUTURE ROBOT이가장많은특허를보유하고있으며, 국내에서는대학교, 공공연구기관을중심으로서비스와콘텐츠제작기술에대한연구개발이이루어지고있음 소셜로봇플랫폼및서비스분야의주요경쟁기술및공백기술 소셜로봇플랫폼및서비스의주요경쟁기술은소셜로봇플랫폼제작기술개발, 멀티모달인간-로봇상호작용, 통합운영소프트웨어프레임워크기술로나타남 소셜로봇플랫폼및서비스분야에서소셜로봇플랫폼제작기술개발, 멀티모달인간-로봇상호작용, 통합운영소프트웨어프레임워크기술이가장치열한분야이고, 상황인식기술개발, 서비스와콘텐츠제작기술분야는아직까지출원이활발하지않은공백기술분야로나타남 세부분야요소기술기술집중도 소셜로봇플랫폼제작기술 상황인식기술개발 감성표현을위한로봇얼굴 유연한제스처와자세표현 감성형로봇플랫폼디자인과시스템통합 사용자감정인식기술 원거리음성인식기술 사용자행동인식기술 지식기반인간 - 로봇상호작용지능체계구축기술 멀티모달인간 - 로봇상호작용 멀티모달대화시나리오저작기술 멀티모달상호작용실행엔진기술 멀티모달감정표현기술 사용자와의상호작용을위한 대화및의사소통기술 통합운영소프트웨어프레임워크 서비스와콘텐츠제작기술 멀티모달인식제어통합기술 원격모니터링과제어기술 IoT 및클라우드서비스연동기술 서비스와콘텐츠제작모델표준화기술 콘텐츠공유관리유통체계 : 1,000 건이상, : 750~999 건, : 500~749 건, : 250~499 건, : 250 건미만 369
378 기술개발테마현황분석 최신국내특허기술동향 분류요소기술최근핵심요소기술동향 소셜로봇플랫폼제작기술개발 감성표현을위한로봇얼굴 유연한제스처와자세표현 감성형로봇플랫폼디자인과시스템통합 감정정보를수신하여감정정보에대응하는이동을수반하는동작을진행하는기술 인체의신경계를기반으로정서를합성하고표현하는기술 신체자세의깊이영상을획득하여제스처를인식하는기술 진화알고리즘과모방학습을통해동작을제어하는기술 상황인식기술개발 멀티모달인간 - 로봇상호작용 통합운영소프트웨어프레임워크 서비스와콘텐츠제작기술 사용자감정인식기술 원거리음성인식기술 사용자행동인식기술 지식기반인간-로봇상호작용지능체계구축기술 멀티모달대화시나리오저작기술 멀티모달상호작용실행엔진기술 멀티모달감정표현기술 사용자와의상호작용을위한대화및의사소통기술 멀티모달인식제어통합기술 원격모니터링과제어기술 IoT 및클라우드서비스연동기술 서비스와콘텐츠제작모델표준화기술 콘텐츠공유관리유통체계 상대의얼굴기반영상분석을진행하여감정의정도를파악하는기술 생체정보를이용한감정인식기술 센서에의해수신된감각정보와주변환경및상황을인식하여인간-로봇상호작용기술 주변환경및로봇의센서에의해상황을인식하고상호작용서비스를제공하는기술 환경정보를수집하고, 동작에필요한정보를클라우드서버로부터수집하여실행하는기술 로봇의모션을순차적으로연출하고미디어와동기화하여연출할수있는콘텐츠제작장치기술 상호작용경험정보를분석하여교육시스템과연동되는콘텐츠 최근국내에출원되는특허를통해기술동향을살펴보면, 소셜로봇플랫폼및서비스에대한요소기술대부분은대학교, 공공연구기관중심으로연구개발이이루어지고있는것으로나타남 상황인식기술개발기술에서는상대의얼굴기반영상분석을진행하여감정의정도를파악하는기술, 생체정보를이용한감정인식기술이개발되고있는것으로나타남 서비스와콘텐츠제작기술에서는로봇의모션을순차적으로연출하고미디어와동기화하여연출할수있는콘텐츠제작장치기술, 상호작용경험정보를분석하여교육시스템과연동되는콘텐츠기술이개발되고있는것으로나타남 370
379 소셜로봇플랫폼및서비스 중소기업특허전략수립방향및시사점 소셜로봇플랫폼및서비스분야의공백기술분야는상황인식기술, 서비스와콘텐츠제작기술로나타남 인구고령화, 1인가구의증가, 개인주의심화등변화하는현대사회에서의복잡다양한사회문제를해결할수있는도구의하나로소셜로봇이주목받고있으며, 이에대한연구가진행되고있음 해외에서는기업이소셜로봇플랫폼및서비스분야를개발하고있으나, 국내에서는대학교, 공공연구기관에서연구를진행하고있는분야임 상황인식기술, 서비스와콘텐츠제작기술이공백기술로나타났지만, 특허를확보하기위한전략이필요할것으로판단됨 향후중소기업은공백기술분야이면서대학교, 공공연구기관에서활발히연구개발을하고있는기술을이전받거나공동연구개발을진행하여제품화하는방향을우선적으로고려해볼수있을것으로사료됨 371
380 기술개발테마현황분석 5. 연구개발네트워크 가. 연구개발기관 / 자원 연구개발기관 소셜로봇플랫폼및서비스분야주요연구개발기관 한국전자통신연구원 ( 소장한동원 ) - SW 콘텐츠연구소의지능로보틱스연구본부 ( 본부장신성웅 ) 는로봇지식생성 / 융합 / 분석 / 추론기술과영상 / 음성 / 센서융합인식및인간로봇상호작용기술을개발 - HMI 연구그룹은로봇이사람간의상호작용과유사하게상호작용할수있는 HMI 컴포넌트소프트웨어를개발하고, 다수의카메라와마이크센서를이용하고요소기술들의인식능력을하나로합하여사용자들의모든인식가능한정보를쉽게사용할수있도록제공하고지속적인모니터링으로정확하고포괄적인정보를제공 - SW 콘텐츠연구소의지능정보연구본부 ( 본부장박상규 ) 는언어지능기술, 음성지능기술등을개발 - 언어지능연구그룹은질의응답, 다국어자동번역, 대화처리기술을주요연구분야로두고, 음성지능연구그룹은음성인식기술, 자동통역기술등인공지능의주요분야인음성지능기술연구수행중이며 IoT 환경에서인간친화적이고지능화된서비스를지원하는대화음성인터페이스기술등을연구중 - 음성처리연구실 ( 담당자박전규 ) 에서 DB-CALL 기반지능형영어학습시스템인지니튜터를개발하였고, 이시스템은컴퓨터를이용하여영어말하기연습을수행하며, 영어표현학습, 문법및발음교정등을제공받을수있는음성언어기술기반영어학습서비스시스템 (2014) - 세계최초로 ISO 국제표준으로채택된 ETRI에서개발한자동통역기술 제로유아이 (Zero UI) 는기존의스마트폰터치기반의자동통역기사용보다진화한형태로사용자가스마트폰을주머니나핸드백에두고블루투스와헤드셋을활용하여통역하는기술로핵심기술은 2채널음성처리기술과바지인 (Barge-in) 기술등임 - ETRI에서딥러닝기술을바탕으로대용량의데이터를이용하는 9개언어음성인식가술을개발하여다국어음성데이터 (DB) 와음성텍스트의다국어데이터 (DB) 를보유한곳이없어다국어음성인식관련시장의기업들에큰도움이될것으로보임 전자부품연구원정보통신미디어연구본부 ( 본부장이규복 ) - 스마트미디어연구센터 : 지능형개인화미디어솔루션, 지능형홈플랫폼, 상황인지형미디어검색 분석 추천 - 콘텐츠응용연구센터 : 콘텐츠융합임베디드SW 기술, AI기반스마트콘텐츠기술 전자부품연구원융합시스템연구본부 ( 본부장이형수 ) - 지능로보틱스연구센터 : 인지 판단 행동등로봇지능기술, 제조, 전문서비스로봇용구동모듈 - 인공지능연구센터 : 차세대기계학습및추론기술, 청각지능및언어지능기술, 의미추출및상황이해시각지능기술, 인간-기계인터페이스기술 372
381 소셜로봇플랫폼및서비스 한국생산기술연구원융합생산기술연구소 ( 소장장인훈 ) - 휴먼융합기술그룹 ( 그룹장임대영 ) : 동작분석시스템 ( 노종련연구원 ) - 로봇그룹 ( 그룹장이동욱 ) : 사람의표정빅데이터를딥러닝기술로학습하여로봇을비롯한피사체의얼굴표정, 표현감정을판별하는감정인식기술과인지기반로봇지능및인간로봇상호작용기술개발해인간의감정을읽는소셜로봇 에버 를개발 한국로봇융합연구원 ( 원장박철휴 ) - 특수목적서비스로봇, 로보테인먼트핵심요소기술개발 - 감성, 실감움직임표현기술및로보틱우대장치기술개발 - 간호서비스로봇, 교육용로봇플랫폼, 안내서비스로봇 한국과학기술연구원로봇연구단 - NBIC 기술융합 ( 나노, 바이오, 정보통신및인지과학기술의융합 ), 로봇기술, 가상현실기술, 인간-컴퓨터상호작용기술을통해실감교류로보틱스및실감인터랙션기술개발 - 자연스럽고직관적인인간-컴퓨터-로봇양방향실감인터랙션 한국과학기술연구원지능로봇사업단 - 메로S(MERO-S) 는사람보다는일체형 PC에가까우며사람과감성적교류가가능한로봇임 - 노인치매예방로봇 실벗 은용인실버타운 삼성노블카운티 에서치매환자들의치료와경북대학교의과대학에서자폐아이들의치료에활용되기시작함 아이피엘 (IPL) - 아이지니 (ijini) 를개발하여중국에 160억규모수출계약체결 - 아이지니는학습형기기등록을통해집안기기제어가가능하며사용자설정에따라다양한시나리오설정이가능하고, 시나리오기반자동주행및장애물자동회피기능뿐만아니라음원방향추적기술등을통해음성을인식하고호출시사용자위치로이동이가능 - 음성인식을통해소통하며스케줄, 알람설정등의기능을제공하는개인비서역할, 홈모니터링과순찰등을수행하는경비원역할, 함께게임을하거나춤추고노래하는엔터테이너역할, 집안의가전을제어해주는스마트홈허브역할, 간단한대화를하며인간과공감하는커뮤니케이터의역할등다양한기능을제공 와이에스티티 (YSTT) - 인천국제공항기업인전용 (CIP) 라운지에서비스로봇을도입운용중 - 단순순회에서맞춤배달로서비스모델이개선됨. 스스로위치를파악하고주행경로를설정. 라이다스캔으로위치를파악, 주행시사람이나장애물을만나면회피 AI브레인 - 한국전자인증과인공지능전문기업보나비전과공동개발한교육용 AI지능로봇타이키 (TYCHE) 는보고듣고상황에맞게말하는로봇으로아이들과함께놀면서도어학용공부가가능한스마트교육용로봇으로캠브리지영어 ( 초급단계 ) 90% 를응답하는수준의획기적인인공지능로봇으로아이들스스로지능계발을하도록돕는스마트폰로봇 373
382 기술개발테마현황분석 퓨처로봇 - 국내대표전문서비스로봇기업으로오픈플랫폼서비스로봇인 퓨로 (FURO) 시리즈를개발하였으며, 올해클라우드인공지능과전자결제솔루션을결합한서비스로봇인 퓨로데스크 를선보임 LG - 스마트홈게이트웨이역할을수행하는허브 (Hub) 로봇을 CES 2017 전시회에소개함 - 허브는미국의지보 (Jibo) 와유사한외형과구동부를소유한소셜로봇으로스마트홈제어외에대화기반상호작용, 음악재생, 일정관리등비서기능도제공함 - 미국출시용허브는아마존의알렉사 (Alexa) 를기반으로음성기반서비스를제공 SKT - 14년 6월 KT의교육용로봇 키봇 (Kibot) 을생산한아이리버를인수하고, 로봇활용소프트웨어개발교육프로그램 스마트로봇코딩스쿨 을출시하는등교육용로봇사업강화 - 대화기반의상호작용과음악재생, 스마트홈제어등의기능을제공하는스마트스피커인 누구 (NUGU) 를출시 연구개발자원 국가연구개발지원 사업 중소벤처기업부 - 중소기업기술혁신사업 - 상용화기술개발사업 ( 구매조건부등 ) - 융복합기술개발사업 - 산학연협력기술개발사업 - 제품서비스기술개발사업 - 중소기업 R&D 역량제고사업 - 제품 공정개선기술개발사업 - 맞춤형기술파트너지원사업 - 산연전용과제 : 우수 R&D 인프라를활용한대표적인중소기업지원연구기관으로연구부서와중소기업간연계를통한기술지원은물론변리사, 산학연협력코디네이터, 기술거래사, 기술가치평가사등기술사업화관련전담인력이사업화사안마다관여해고품질비즈니스컨설팅제공 산업통상자원부 - 에너지 자원기술개발사업 - 전략핵심소재기술개발사업 - 산업융합원천기술개발사업 - 로봇미래전략 (2013~2022) - 산업엔진프로젝트 (19대미래성장동력 ) 374
383 소셜로봇플랫폼및서비스 - 사업화연계기술개발사업 ( 민간투자연계형등 ) - 발전시설등에감시경계안전로봇등시범적용 과학기술정보통신부 / 우정사업본부, 문화체육관광부 - 우체국에인공지능기반소셜로봇시범적용 - 전시장, 박물관안내서비스등에소셜로봇적용 로봇산업정책협의회 - 창의적 도전적로봇연구촉진을위한풀뿌리지원프로그램 한국로봇산업진흥원 - 시장창출형로봇보급사업 : 보건복지부와국립재활원이참여하는의료재활로봇보급사업으로산업통상자원부와부천산업진흥재단이참여하는시장창출형로봇부품보급사업등의공공수요형사업과아이디어발굴형사업을진행 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등맞춤형기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원 ) - e-tube 를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 지능형로봇테스트베드 ( 한국전자통신연구원 ) - 지능형로봇테스트베드에서로봇시험장비및인프라구축, 로봇시험평가방법개발및시험인증체계구축, 로봇시험평가방법개발및시험인증체계구축, 지능형로봇시험지원서비스제공 375
384 기술개발테마현황분석 나. 연구개발인력 소셜로봇플랫폼및서비스분야는한국전자통신연구원, 전자부품연구원, 한국생산기술연구원, 한국과학기술연구원, 카이스트 (KAIST) 에서주로연구개발을진행하고있음 정부는개방형로봇산업생태계조성을위해인력양성측면에서多기술영역업무수행및 다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형 로봇전문인력양성추진 휴머노이드로봇은기술적파급효과가크고인간형로봇분야에서세계선도기술을확보하고전문연구인력을양성하기위해 휴머노이드로봇연구센터 를카이스트 (KAIST) 에설치하여고속 고출력인간형로봇플랫폼가보행 조작성능고도화를위한요소기술과핵심부품등을개발하고, 석박사급연구인력 100명양성을목표로함 [ 소셜로봇플랫폼및서비스분야주요연구조직현황 ] 기관한국전자통신연구원전자부품연구원한국생산기술연구원한국과학기술연구원가톨릭대학교목포대학교동아대학교충남대학교포항공과대학교 376
385 소셜로봇플랫폼및서비스 다. 기술이전가능기술 (1) 기술이전가능기관 소셜로봇플랫폼및서비스의요소기술은크게유연한제스처와자세표현, 사용자감정인식기술, 사용자행동인식기술, 멀티모달대화시나리오저작기술, 멀티모달상호작용실행엔진기술, 멀티모달감정표현기술, 멀티모달인식제어통합기술의총일곱개의분류로구분됨 기술이전이가능한기관은한국전자통신연구원, 한국생산기술연구원, 포항공과대학교, 충남대학교, 가톨릭대학교, 동아대학교, 목포대학교가있음 [ 소셜로봇플랫폼및서비스요소기술연구조직 ] 분류요소기술기관 유연한제스처와자세표현 휴머노이드로봇의자세제어장치및방법 동아대학교 사용자감정인식기술 얼굴표정을이용한감정인식장치및그제어방법 충남대학교 사용자행동인식기술 프로젝터와카메라및거리센서를이용하여안내화면을제공하는전시장용도슨트이동로봇 목포대학교 멀티모달대화시나리오저작기술 멀티모달음성대화데이터수집을위한반복적오즈의마법사방법과그장치 포항공과대학교 멀티모달상호작용실행엔진기술 상황의도판단을위한상황추론엔진 통신부하를낮추고성능을향상시킨공연용로봇시스템 한국전자통신연구원 한국생산기술연구원 멀티모달감정표현기술 멀티모달인식제어통합기술 멀티모달리티감정인식시스템, 감정인식방법및그기록매체 얼굴표정인식방법및이를사용하는영상콘텐츠감상용로봇의동작방법 충남대학교 가톨릭대학교 377
386 기술개발테마현황분석 (2) 이전기술에대한세부내용 분류 기술명 세부내용 얼굴표정을이용한감정인식장치및그제어방법 기술이전목적및필요성 해당기술은얼굴표정을이용한감정인식장치및그제어방법에대한것으로서, 보다상세하게는객체의얼굴표정변화를감지함으로써객체가느끼는복수의감정을구별할수할수있는얼굴표정을이용한감정인식장치및감정인식방법을제공하기위한것임 기술활용방안및기대성과 해당기술의일예와관련된얼굴표정을이용한감정인식장치는기설정된기준에따라분류된복수의감정각각에대응하는제 1 객체에대한제 1 영상을획득하기위한카메라, 상기제 1 영상중복수의제 1 프레임을사용자로부터지정받기위한사용자입력부, 상기제 1 프레임에포함된상기제 1 객체의얼굴을인식하고, 상기인식된얼굴을이용하여상기제 1 객체의얼굴요소를추출하며, 상기얼굴요소를이용하여상기복수의감정각각에대한변화패턴을추출하는제어부와상기추출된복수의감정각각에대한변화패턴을저장하는메모리를포함하되, 상기카메라를통해상기제 1 객체에대한제 2 영상이획득되는경우, 상기제어부는, 상기제 2 영상에포함된제 1 객체의얼굴요소의제 1 변화패턴을추출하고, 상기메모리에저장된복수의변화패턴중상기제 1 변화패턴과동일한변화패턴에대응하는감정이상기제 1 객체의감정으로판단되도록제어할수있음 세부문의 기술및계약관련 충남대학교 378
387 소셜로봇플랫폼및서비스 분류 기술명 세부내용 프로젝터와카메라및거리센서를이용하여안내화면을제공하는전시장용 도슨트이동로봇 기술이전목적및필요성 해당기술은프로젝터와카메라를이용하여시야각의개선과선명도높은화면 생성이가능한안내용이동로봇구성방법에관한것임 기술활용방안및기대성과 안내용이동로봇의위치인식방법과화면을투영할벽면검출방법, 벽면에투영된화면초점을맞추기위한방법들을형성하는방법에관한것임 이를위하여해당기술은로봇의이동경로에따른주행은자계안내선을통하여자계위치센서를통하여이동을하며, 안내할전시작품 (600) 의위치에알에프아이디 (310) 를부착하여이동중로봇의중앙에알에프아이디리더기 (300) 가검출을하면안내할콘텐츠를시작함 여기서카메라 (500) 와영상처리기 (510) 를이용하여투영할벽 (420) 을검출하고, 거리센서 (900) 를이용하여벽면 (420) 과프로젝터 (400) 사이의거리측정을통한투영이적합한높이를검출하여높이조절장치 (800) 로높이조절을하고, 팬틸트 (430) 를이용하여알맞은시야각과선명도를조절하여사용자가최적화된화면으로안내를받을수있는시스템기반방법을제시함 기술관련 세부문의 목포대학교 계약관련 379
388 기술개발테마현황분석 분류 기술명 상황의도판단을위한상황추론엔진 세부내용 기술이전목적및필요성 인간 - 로봇상호작용, IoT(Internet of Things), 홈네트워크등의각종분야에서 서비스와기능의효과적인실행을위해필수적인상황판단에적용가능한 상황의도판단을위한상황추론엔진기술 기술활용방안및기대성과 본기술은사실과규칙의형식으로지식을표현하여선언하고이를기반으로논리적인추론을실행할수있을뿐아니라, 웹표준지식표현언어인 W3C OWL(Web Ontology Language) 과 SWRL(Semantic Web Rule Language) 을지원함으로써로봇분야뿐아니라사물인터넷 (Internet of Things), 홈네트워크, 지능형챗봇등상황인지가필수적인다양한응용분야에서지능형기능을개발하는데활용가능한요소기술임 본기술을활용하면지식표현을응용으로부터분리하여저작, 실행, 관리할수있으므로다양한환경에빠르게지능적서비스를개발적용할수있음 본기술을활용함으로써각종지능형서비스의개발비용을최소화할수있을뿐아니라환경변화에빠르게대응할수있음 상황추론엔진은두종류의지식표현방식 ( 규칙과온톨로지 ) 을모두지원하므로, 상황추론엔진을활용하면온톨로지와규칙을결합하여보다효과적으로지식을표현하고처리할수있음 기술관련 세부문의 한국전자통신연구원 계약관련 380
389 소셜로봇플랫폼및서비스 분류 기술명 세부내용 멀티모달리티감정인식시스템, 감정인식방법및그기록매체 기술이전목적및필요성 해당기술은멀티모달리티감정인식시스템및감정인식방법에관한것임 기술활용방안및기대성과 감정상태에따라다양하게변하는객체의반응을생체신호, 얼굴표정, 및얼굴표면온도등의멀티모달리티를활용하여동시에병렬적으로측정함으로써객체가느끼는감정상태를인식할수있는멀티모달리티감정인식기술에관한것임 이를위해제시된자극에대응하여반응하는객체 (Object) 의반응을멀티모달리티를통하여측정하는반응측정수단 (100); 측정된데이터로부터감정인식에필요한특징데이터를추출하고, 추출된특징데이터를서로융합하는융합수단 (200); 및융합수단 (200) 에서융합된데이터에기초하여감정을인식하는감정인식수단 (300); 을포함하는것을특징으로하는멀티모달리티감정인식시스템이개시됨 기술관련 세부문의 충남대학교 계약관련 381
390 기술개발테마현황분석 분류 기술명 세부내용 얼굴표정인식방법및이를사용하는영상콘텐츠감상용로봇의동작방법 기술이전목적및필요성 본발명은얼굴표정인식방법및이를사용하는영상콘텐츠감상용로봇의 동작방법에관한것임 기술활용방안및기대성과 본발명에따른얼굴표정인식방법은아래 (a)~(g) 의단계를포함하는것을특징으로함 (a) 입력되는영상으로부터얼굴영역을추출하여상기추출된얼굴영역의포즈를추정하는단계 (b) 상기추출된얼굴영역의포즈가정면을응시하는것으로추정되는경우, 상기추출된얼굴영역의얼굴형태및얼굴텍스처 (Texture) 를추출하는단계 (c) 상기추출된얼굴형태및얼굴텍스처 (Texture) 를기설정된평균형태로와핑 (Warpping) 하여평균얼굴형태및평균얼굴텍스처 (Texture) 를생성하는단계 (d) 상기평균얼굴형태및상기평균얼굴텍스처 (Texture) 를레티넥스 (Retinex) 처리하는단계 (e) 복수의얼굴표정에대해상기 (a) 단계내지상기 (d) 단계를각각수행하고, 상기각얼굴표정에대한상기레티넥스 (Retinex) 처리된평균얼굴형태및상기레티넥스 (Retinex) 처리된평균얼굴텍스처 (Texture) 에기초하여상기각얼굴표정에대한제1얼굴파라미터를학습하는단계 (f) 입력되는영상에대해상기 (a) 단계내지상기 (d) 단계를수행하여생성되는레티넥스 (Retinex) 처리된평균얼굴형태및평균얼굴텍스처 (Texture) 에기초하여제2얼굴파라미터를생성하는단계 (g) 상기제1얼굴파라미터중상기제2얼굴파라미터와가장큰유사도를갖는어느하나로상기제2얼굴파라미터에대한얼굴표정을추정하는단계 세부문의 기술관련 계약관련 가톨릭대학교 382
![소셜로봇플랫폼및서비스 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 소셜로봇플랫폼및서비스분야키워드클러스터링 ] [ 소셜로봇플랫폼및서비스분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 클러스터 01 communicati on device 4~6 1.](/docs-images/93/112329278/images/391-1.jpg "Design and Implementation of Virtual Instructor Based on NAO Robot 2. A model for an emotional respondent robot 3. Communication system in trains 클러스터 02 interactive education 5~6 1.")
391 소셜로봇플랫폼및서비스 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 소셜로봇플랫폼및서비스분야키워드클러스터링 ] [ 소셜로봇플랫폼및서비스분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 클러스터 01 communicati on device 4~6 1. Design and Implementation of Virtual Instructor Based on NAO Robot 2. A model for an emotional respondent robot 3. Communication system in trains 클러스터 02 interactive education 5~6 1. Mobile robotics laboratory in a virtual world 2. Interactive education system for teaching patient care 3. Systems and methods for computerized interactive training 383
392 기술개발테마현황분석 No 주요키워드연관도수치관련특허 / 논문제목 1. Exploratory learning with geodromo: Design of emotional and 클러스터 03 education content 3~4 cognitive factors within an educational cross-media experience 2. ONLINE EDUCATION PLATFORM HAVING AN INSTRUCTOR DASHBOARD 3. Electronic Healthcare Education System and Method 1. ASEE Annual Conference and Exposition, Conference 클러스터 04 education system 3~5 Proceedings 2. Robot and human teacher: A structure of quiz and questionnaire to analyze the efficiency of teaching 3. Interactive Education System for Teaching Patient Care 1. Inferring categories to accelerate the learning of new classes 클러스터 05 learning system 7~8 2. Traditional culture learning system for Korean Folk Literature, Pansori 3. INTERACTIVE LEARNING PATH FOR AN E-LEARNING SYSTEM 1. SYSTEM AND METHOD FOR MANAGING INTERACTIVE TRAINING 클러스터 06 interactive training 5~6 AND THERAPIES 2. System and Method for Virtual Training Environment 3. Process and Apparatus for Computer Training 1. 3rd International Conference on Green Power, Materials and 클러스터 07 virtual instrument 3~5 Manufacturing Technology and Applications, GPMMTA Interactive education system for teaching patient care 3. Reactive human-robot interaction learning in virtual environments 1. Reactive human-robot interaction learning in virtual environments 클러스터 08 interactive learning 3~5 2. Method and System for Providing Content for Learning Appliances Over an Electronic Communication Medium 3. Method and system for providing content for learning appliances over an electronic communication medium 384
393 소셜로봇플랫폼및서비스 No 주요키워드연관도수치관련특허 / 논문제목 1. Simulating Get-Understand-Share-Connect model for personal 클러스터 09 learning environment 4~7 knowledge management in learning environment 2. Investigating interactions between students with mild mental retardation and humanoid robot in terms of feedback types 3. Instruction System with Eyetracking-Based Adaptive Scaffolding International Conference on Information and 클러스터 10 train communicati on 5~6 Communication Technology Convergence, ICTC TRAIN COMMUNICATION SYSTEM AND TRAIN COMMUNICATION METHOD 3. Transport unit 385
394 기술개발테마현황분석 (2) 요소기술도출 산업 시장분석, 기술 ( 특허 ) 분석, 전문가의견, 중소기업기술수요를바탕으로로드맵기획을 위한요소기술도출 [ 소셜로봇플랫폼및서비스분야요소기술도출 ] 분류요소기술출처 소셜로봇플랫폼제작기술개발 감성표현을위한로봇얼굴 유연한제스처와자세표현 감성형로봇플랫폼디자인과시스템통합 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천 기술 / 시장분석, 전문가추천 사용자감정인식기술 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 상황인식기술개발 원거리음성인식기술 사용자행동인식기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 지식기반인간 - 로봇상호작용지능체계구축기술 멀티모달대화시나리오저작기술 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 멀티모달인간 - 로봇상호작용 멀티모달상호작용실행엔진기술 멀티모달감정표현기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 기술 / 시장분석, 전문가추천 사용자와의상호작용을위한대화및의사소통기술 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 통합운영소프트웨어프레임워크 멀티모달인식제어통합기술 원격모니터링과제어기술 IoT 및클라우드서비스연동기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 기술수요, 기술 / 시장분석, 전문가추천 서비스와콘텐츠제작기술 서비스와콘텐츠제작모델표준화기술 콘텐츠공유관리유통체계 기술 / 시장분석, 전문가추천 전문가추천 386
395 소셜로봇플랫폼및서비스 (3) 핵심요소기술선정 확정된요소기술을대상으로중소기업에적합한핵심요소기술선정 [ 소셜로봇플랫폼및서비스분야핵심요소기술 ] 분류핵심요소기술개요 소셜로봇플랫폼 감성표현을위한로봇얼굴기술 유연한제스처와자세표현기술 하드웨어장치, 아바타, 프로젝션등다양한접근방법을기반으로사용자, 환경및상호작용상황에따라풍부한감정을표현할수있는로봇얼굴의디자인, 제작및제어기술 고개움직임, 팔동작, 몸체자세등상호작용상황에적합한다양한자세와동작을유연하고효율적으로표현할수있는하드웨어제작및제어기술 로봇영상기반사용자행동인식기술 사용자의제스처, 자세, 활동을인식하는기술 상황인식과표현 멀티모달신호기반사용자감정인식기술 영상과음성신호를기반으로표정, 말투, 음운등의정보를검출하여사용자의감정을인식하는기술 멀티모달감정표현기술 상황변화에따라감정상태를제어하는로봇감정모델과이를기반으로로봇의다양한표현메카니즘을융합하여효과적으로감정을표현하는기술 멀티모달대화시나리오저작기술 로봇의멀티모달표현기능을활용하는대화기반의상호작용시나리오를효율적으로저작할수있는언어체계와저작도구 멀티모달상호작용실행엔진기술 저작된시나리오를해석하여상호작용상황에적합한로봇행위를결정하고실행하는실행엔진기술 콘텐츠 / 서비스통합운용 멀티모달인식제어통합 소셜로봇의상호작용능력을실현하는데필요한다수의 SW 모듈들을대상으로연동체계, 처리흐름, 자원관리등을통합제어하는기술 IoT 및클라우드서비스연동기술 로봇자체플랫폼뿐아니라환경내 IoT 장치와클라우드로부터정보를획득하여활용하고제어함으로써서비스의양과질을향상하고, 클라우드를통해로봇간의정보공유와협업을이룩하는연동기술 387

396 기술개발테마현황분석 나. 소셜로봇플랫폼및서비스기술로드맵 최종중소기업기술로드맵은기술 / 시장니즈, 연차별개발계획, 최종목표등을제시함으로써 중소기업의기술개발방향성을제시 388
397 소셜로봇플랫폼및서비스 다. 연구개발목표설정 핵심요소기술별최종목표는아래와같이기술요구사항과연차별개발목표로제시함 [ 소셜로봇플랫폼및서비스분야핵심요소기술연구목표 ] 분류핵심요소기술기술요구사항 연차별개발목표 1 차년도 2 차년도 3 차년도 최종목표 소셜로봇플랫폼 감성표현을위한로봇얼굴제작기술 유연한제스처와자세표현기술 감성과행위개수 ( 연차별누적 ) 표현동작의자유도 ( 연차별누적 ) 얼굴기반총 8 종의감정과행위표현 손과팔로총 18 자유도의동작표현 로봇영상기반사용자행동인식기술 행동개수 / 정확도 10 / 85% 20 / 90% 30 / 95% 1 인칭시점영상기반사용자행동정밀인식 상황인식과표현 멀티모달신호기반사용자감정인식기술 모달리티 / 정확도 영상 / 85% 영상 + 음성 / 87% 영상 + 음성 + 발화문장 / 90% 2 개이상의모달리티융합기반 90% 이상정확도 멀티모달감정표현기술 모달리티 / 적합도 표정 / 60% 표정 + 제스처 / 70% 표정 + 제스처 / 80% 2 개이상의모달리티를통해감정을표현하여사용자적합성판정수준 80% 이상달성 ( 적합성은정성평가 ) 멀티모달대화시나리오저작기술 구현범위 멀티모달대화스크립트 상황인식정보연동구문지원 - 상황인식정보연계활용을지원하는스크립트기반대화시나리오저작 콘텐츠 / 서비스통합운용 멀티모달상호작용실행엔진기술 멀티모달인식제어통합 자동화방법 / 동기화수준 구현범위 행위태깅 / 문장단위 아키텍처설계와개발 단어매칭 / 문장단위 의미매칭 / 어절단위 시범시나리오개발과검증 발화문장의의미에따라행위를결정하여어절단위로동기화하여실행 통합아키텍처의개발과검증 ( 정성평가 ) IoT 및클라우드서비스연동기술 연동규모 5 종 10 종 15 종 사용자편의성증진을위한 IoT 와클라우드연동서비스확대 389
398
399 가전로봇 기술개발테마현황분석
400
401 가전로봇 정의및범위 일반가정내에서가사활동을보조하거나자율적으로가정내환경을판단하여정해진가사업무를 스스로수행하는로봇 실내 / 외청소용로봇, 기존의가사용제품을사용하는가사도우미로봇등 정부지원정책 로봇산업발전방안 을확정짓고서비스로봇공공수요발굴, 로봇로드맵, 휴머노이드연구센터설립등추진 관계부처합동으로 2017년지능형로봇실행계획 을발표해범국가적로봇융합네트워크구축, 신규수요창출및해외시장진출기반확대등구체적실행계획을공개 로봇핵심부품활성화정책수립및진행 광주테크노파크가전로봇센터는로봇관련기업을육성하고, 로봇관련시험평가장비와시제품개발장비를도입하여, 기업의기술개발과제품생산을지원 중소기업시장대응전략 강점 (Strength) ( 환경 ) 인공지능을보유한가전로봇에대한수요증가 ( 기술 ) 인공지능서비스로봇기술보유 ( 정책 ) 지능형로봇에대한지원정책강화기회 (Opportunity) ( 환경 ) 1인및고령화가구의증가로수요증가 ( 기술 ) 세계수준의가전과융합한고품질제품개발가능 ( 정책 ) 서비스로봇산업에대한지원확대 약점 (Weakness) ( 환경 ) 같은기능이라도대기업제품을우선하는소비문화 ( 기술 ) 글로벌선도형기술부재 ( 정책 ) 가전로봇의빠른제품사이클에맞춘정책부재위협 (Threat) ( 환경 ) 중국의저가로봇과의경쟁 ( 기술 ) 가전대기업들의특허 ( 정책 ) EU 등경쟁국에서대규모의스타트업기업지원 중소기업의시장대응전략 단순한기능적수행뿐만아니라안정성과신뢰성을동시에확보해시장의요구에대응 가전로봇기술중상대적으로공백기술인인간 - 로봇연결기술에집중
402 핵심요소기술로드맵
403 가전로봇 1. 개요 가. 정의및필요성 가전로봇이란일반가정내에서가사활동을보조하거나자율적으로가정내환경을판단하여 정해진가사업무를스스로수행하는로봇을의미 가전로봇의범위는실내 / 외청소용로봇, 기존의가사용제품을사용하는가사도우미로봇 등으로분류를나눌수있음 고도의정밀도나정교함을요구하는산업용로봇과달리가전로봇은예기치못한다양한환경에대한유연성이보다더요구됨 가전로봇이운용되어야하는가정환경은뛰어노는어린아이, 세힘한주의가필요한영유아, 예측할수없는반려동물, 사용자의로봇에대한이해도등등로봇입장에서주의해야하는다양한환경이존재하기때문에작업의유연성, 효율성이로봇에게요구됨 가정內가사활동의다양한종류에맞춰로봇의목적및기능분류와표준화도이루어져야함 가전로봇은기존의가전제품에로봇의기능이더해지는것에서새로운형태의로봇에대한 시도도존재하고있음 소비자의필요성에의해개발되기보다는소비자의필요성도개발할필요가있는분야임 소비자가가전제품을다루듯이로봇을다루는분야이므로손쉬운작동과견고함안정성등이 요구됨 특히고령화시대, 1 인가구의증가시대에맞춰가전로봇도화재예방, 화재경고, 방범 등의기능도포함되는것이필요함 395
404 기술개발테마현황분석 나. 범위 (1) 제품분류관점 사용되는목적에따른분류는실내청소, 실외청소, 가사도우미로봇으로구분 실내청소형로봇은실내환경에서환경인식, 주행기술을보유한자율청소로봇으로정의 실외청소형로봇도실내청소형로봇과사용되는기술은비슷할수있지만, 환경적요소에대해보다넓은인식범위와보다열악한동작환경에대해더욱강인한성능이요구됨 가사도우미로봇은현재정확히분류를하는것은어렵지만실내물건의정리택배물품수령및접수등의업무를처리하기위해기존의청소용로봇과는차별되는로봇을의미 그로인해가사도우미로봇은사람처럼팔과손, 혹은그에상응하는기능으로물건을잡고정리하는능력을보유할수있음 주행기술방식별로는바퀴구동형방식과다리나비행등과같은비바퀴구동형, 그리고고정형으로구분할수있음 기존의청소로봇처럼바퀴구동형이있을수있으며자율주행능력을보유하거나혹은그렇지않아도자신의위치를파악하고주변환경을인지하는능력을가짐 다양한로봇을시도하는현재기술분위기를보면가사지원로봇들이바퀴뿐만아니라다리구동형이나실내외를넘나들며물건의정리나이동을도와주는형태의로봇으로발전할가능성이높음 또한요리하는로봇이나쓰레기분류등고정된자리에서임무를수행하는고정형로봇이있을수있음 현재로봇의일반적기술과현재많은관심을받고있는로봇의개발중인기술을가전 로봇에적용할수있는범위로분류 [ 제품분류관점기술범위 ] 기술개발테마 가전로봇 제품분류관점 음성인식 / 합성기술 영상인식 / 감정기술 네트워킹기술 하이브리드앱기술 위치인식및자율주행 환경인식및판단 장애물파악및회피 제품별용도 청소로봇, 가사도우미로봇등에음성명령및현상황음성보고 가전로봇이가족구성원을인식하거나물건을인식하고, 가족 구성원의감정을읽거나, 자신의상황을인간친화적인감정용어로 표현하는것 로봇간의통신뿐아니라현재 IoT 기술이탑재된여러가전제품과의 통신기술 로봇의구동 및 로봇의 상태, 로봇이 수집한 데이터를 외부에서 확인하기위한모바일앱및로봇구동기술 다양한센서와알고리즘을활용한위치인식및자율주행기술 여러환경인지센서기술을활용한화재등의재난인식및인간과 재산을지키기위한판단기술 주행기능을가진로봇의경우가정에서있을수있는어린아이, 영유아, 반려견등의다양한장애물을파악하고회피할수있는능력 396
405 가전로봇 (2) 공급망관점 가전로봇의공급망은센서, 구동및그제어기, 인식시스템, 통신모듈, 전원시스템등으로 공급망단계를구분 가전로봇의공급망은다양한가정환경에대응하고인식, 주행혹은머니플레이터기술및 최근활발히연구되는인공기술기능의구현을고려함 [ 공급망관점기술범위 ] 기술개발테마공급망관점세부기술 자율주행및자기위치인식기술 실내청소 이물질흡입등청소기술 추가로가정내환경인식및모니터링기술 장애물인식및회피기술 가전로봇 실외청소 자율주행및실외자기위치및청소범위인식기술 잔디혹은시멘트등불균일바닥에대한대응기술 날씨및외부환경에대한인식기술 가사도우미 물건의적재, 파지및운송기술 로봇팔과같은머니플레이트기술 영상및음성인식기술 환경인식및판단기술 397
406 기술개발테마현황분석 2. 외부환경분석 가. 산업환경분석 (1) 산업의특징 가전로봇은가사노동의대체용으로기존의청소, 정리등의일을대신수행하는로봇 제품의개발을의미 가사노동을돈으로환산할경우연간 143 조원에서 170 조원에이르며이는우리나라 총생산의약 25% 에달하는가치 가사지원로봇분야의 2013 년세계시장규모는 174 억달러로연평균 32% 성장하여 2018 년 650 억달러규모의시장을형성할것으로전망 1 인가구및고령화가구의증가로인해가사노동에대한지원을필요로하는시장의요구가있음 최근까지새로운시장을개척해온청소용로봇은좀더많은기능에대한요구가있음 기존의바퀴로구동되는진공청소기개념에서한단계더나아가자신의위치를파악하고가족구성원의위치를파악해서사람에게방해되지않는곳에서의청소, 혹은다양한환경인식및영상인식능력으로집중청소지역관리등의능력이요구됨 또한가족구성의인식능력을통해방범기능이나화재예방및판단기능이요구됨 집전체를구동하는청소용로봇의특성을활용하여각가전제품혹은각방에대한상태를확인하고모니터링하는기능도요구되고있음 최근인공지능의발전과다양한 IoT 기술의발전으로가사도우미로봇의개념이최근구체화되고좀더발전되고있음 가사도우미로봇을이용한요리, 가정비품의정리정돈, 설거지, 재활용재품의분류, 빨래감을세탁기로이동하는등의로봇이개발되고곧시장에등장할것으로예상 특히단지청소용로봇만의미하던가전로봇이가사도우미의기능을포함하면서더많은기능이필요하게됨 산업용로봇에서요구되던로봇팔의기술이필요하게됨 청소혹은정리대상의확인, 인식등을위한영상관련기술이필요 다양한형태로인간과교감하기위한감정인식및표현기술이필요하게됨 특히사람이없는상태에서가사도우미를활용하기위해서스마트폰이나웹을통한다양한접근방식이또한필요함 398
![가전로봇 지능기반의환경인식, 조작, 인간과의상호교감등을이용한정리정돈기능등의가사노동을소화할수있도록, 인공지능, 자율주행, 위치인식, 감성학습등의기술이요구됨 인간과의상호작용, 대화및의사소통을위한이동, 매니플레이션기능을가진로봇의이용을통한동적인가사노동역할수행이가능한로봇이필요함 * 출처 : 로봇신문 [ 가사도우미로봇의예시 ]](/docs-images/93/112329278/images/407-1.jpg "그러나이러한가전로봇의간과할수없는어려움은가격, 성능, 소음, 수명등까다로운소비자의눈높이를맞추며, 로봇기술에대해무지한소비자를위한편리한조작성능이요구된다는것 액추에이터및핵심센서의가격경쟁력확보 로봇시장확보를위한양산개발및성능개선필요 매니플레이션및주행기술에치중된기존가전로봇기술을네트워크및통신, 인공지능기술과접목하는시도가필요")
407 가전로봇 지능기반의환경인식, 조작, 인간과의상호교감등을이용한정리정돈기능등의가사노동을소화할수있도록, 인공지능, 자율주행, 위치인식, 감성학습등의기술이요구됨 인간과의상호작용, 대화및의사소통을위한이동, 매니플레이션기능을가진로봇의이용을통한동적인가사노동역할수행이가능한로봇이필요함 * 출처 : 로봇신문 [ 가사도우미로봇의예시 ] 그러나이러한가전로봇의간과할수없는어려움은가격, 성능, 소음, 수명등까다로운소비자의눈높이를맞추며, 로봇기술에대해무지한소비자를위한편리한조작성능이요구된다는것 액추에이터및핵심센서의가격경쟁력확보 로봇시장확보를위한양산개발및성능개선필요 매니플레이션및주행기술에치중된기존가전로봇기술을네트워크및통신, 인공지능기술과접목하는시도가필요 관련원천기술개발및상품화는지속적인기술개발과현장적용기술이융합되어야 상용화가가능한구조로대량양산화를위한노력이필요 399
408 기술개발테마현황분석 (2) 산업의구조 가전로봇기술은기계, 전기, 전자, 통신및네트워크기술및인공지능기술의유기적인 융합과연계가시급하며, 특히기능적인수행뿐만아니라인간과공존하는특성이있으므로 안정성과신뢰성의확보가중요함 현재까지가전로봇은스타트업계의많은시도로선제품출시후시장형성구조를가지고 있어서시장의분위기가도전적임 전방산업으로육아및아동교육지원, 가전산업연계, 스마트홈연계등이있어서기술 경쟁력선점이요구되는산업 후방산업으로 ICT 산업과연계되어가사업무지원의첨단화에기여할것으로예상되며 지속적으로수요가증가할것으로전망되는산업 [ 가전로봇산업구조 ] 후방산업가전로봇전방산업 각종센서모듈관련산업, 구동부및제어기관견산업, 배터리등전원관련산업, 인공지능등지식기반산업 실내 / 외청소, 유리창, 벽청소로봇, 주방로봇, 가사도우미로봇 가전산업, 스마트홈산업, 라이프케어, 실버산업 400
 세계시장 가사도우미로봇및가정용청소기로봇의시장은확대될것으로전망되며, 향후가사지원 로봇시장규모확대될것으로전망됨 가전로봇의성장률은연평균 25% 로추정되며 2016 년 1,966 백만달러규모에서 2021 년 4,081 백만달러의시장을가질것으로추정됨 [ 가사로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 16 17 18 19")
409 가전로봇 나. 시장환경분석 (1) 세계시장 가사도우미로봇및가정용청소기로봇의시장은확대될것으로전망되며, 향후가사지원 로봇시장규모확대될것으로전망됨 가전로봇의성장률은연평균 25% 로추정되며 2016 년 1,966 백만달러규모에서 2021 년 4,081 백만달러의시장을가질것으로추정됨 [ 가사로봇분야의세계시장규모및전망 ] ( 단위 : 백만달러, %) 구분 CAGR 세계시장 1,966 2,211 2,487 2,612 3,265 4, * 출처 : World Robotics 2014, 지능형로봇 2015, 국내외로봇산업동향 2015 등을참고하여추정 * 출처 : Macquarie, 2017 [ 세계청소로봇시장전망 ] 맥퀘리는 2017 년청소로봇시장을 22 억달러로추정하고 2025 년그규모는 10 배가넘는 250 억달러가될것으로전망함 이는청소로봇이이제주요가전제품으로자리매김을하고있음을의미하며시장의선택지가 아직다양해서중소기업의진입이용이한것으로판단됨 그중청소용로봇시장은 2020 년경 25 억달러정도규모로시장조사업체인리포트 바이어는예상함 401

410 기술개발테마현황분석 일본의시장조사업체인시드플래닝에따르면일본시장의규모는 2020 년경청소용로봇만 100 만대규모로자국시장규모를예측 402
411 가전로봇 (2) 국내시장 국내시장규모는현재 3 천 7 백억원규모에서 2020 년경 5 천억원규모를돌파할것으로 예상됨 [ 가사로봇분야의국내시장규모및전망 ] ( 단위 : 억원, %) 구분 CAGR 국내시장 3,306 3,718 4,182 4,767 5,434 6, * 출처 : World Robotics 2014, 지능형로봇 2015, 국내외로봇산업동향 2015 등을참고하여추정 국내시장은여전히산업용로봇의규모가크고발전하고있지만, 세계시장의서비스로봇 규모가발전하는것과는달리국내시장은답보상태임 이는진공형청소뿐아니라걸레질을많이하는국내청소문화의독특함도영향을주는 것으로판단됨 세계청소로봇시장이 irobot 이 63% 정도를차지는하는것으로 irobot Investor Presentation 2017 년주장하고있는가운데, 국내 LG 와몇몇중소기업이글로벌시장에 진입하기위해노력중임 403
412 기술개발테마현황분석 (3) 무역현황 가전로봇을포함한개인서비스용로봇의총수출금액은 2012년 1,148억원, 2016년 788억원이며, 총수입금액은 2012년 95억원, 2016년 91억원으로수출과수입모두줄어들고있는것으로나타남 무역특화지수는 2012년 0.85에서 2016년 0.79로수출특화상태임 [ 개인서비스용로봇관련무역현황 ] ( 단위 : 억원, %) 구분 CAGR 수출금액 1,148 1, 수입금액 무역수지 1,053 1, 무역특화지수 * * 무역특화지수 = ( 상품의총수출액 - 총수입액 )/( 총수출액 + 총수입액 ) 으로산출되며, 지수가 0 인경우비교우위는중간정도이며, 1 이면완전수출특화상태를말함. 지수가 -1 이면완전수입특화상태로수출물량이전혀없을뿐만아니라수입만한다는뜻 * 출처 : 2014 로봇산업실태조사결과보고서, 2016 로봇산업실태조사결과보고서 ( 한국로봇산업협회 ) 404

413 가전로봇 다. 기술환경분석 청소용로봇의발전속도는최근 10년간아주빠른진보를보이고있음 로봇청소기는 2001년에최초일렉트로룩스에의해출시된후 2003년 LG 전자및몇몇중소기업에의해개발판매되기시작 그후 2000년대중반청소용로봇은유리등물체를감지하고자동충전기능을탑재하기시작 이후카메라로공간을파악하고, 문턱감지, 청소영상녹화등의기능을탑재하기시작한것이 2011년전후임 이제최근청소용로봇은보다다양한기술과결합하여다양한시도를하고있음 최근서울대는인지 (Perception), 판단 (Desision), 행동 (Activity) 분야를청소용로봇에시행한적이있는데, 이때국내청소용로봇이 5세지능의어린이정도의인공지능을가진것으로조사되었음 청소용로봇의발전은이외에도집전체구조의파악, 보다적극적으로환경을분석하는것을시도하고있음 [ 로봇셰프, 몰리로보틱스 ] 가사로봇의범위는청소용로봇에서벗어나서요리하는로봇, 빨래를분류하고세탁기까지 이송하는로봇, 설거지해야할그릇을식기세척기에넣는로봇으로까지확대되고있음 다양한기업의다양한시도로대중적인지도는상승했지만, 제품의성능은아직기대에 미치지못함 이는전문인력및개발비용이커서중소기업에대한진입장벽을가지고있으며, 너무나 많은분야와의협업이필요한한계를가지고있음 405

 을통해제품을계속진화시키고있음 - irobot은스마트홈이향후중요한트렌드로자리잡을것이라예상하며간편하고, 자동화, 개인화된")
![3세대스마트홈에초점을맞춰제품개발및출시에주력할것으로예상됨 [ irobot 로봇청소기 Roomba 제품중일부모델 ] 로봇청소기시장폭발적성장, 대기업앞다투어진출및연구개발투자증가 - 기존영국다이슨,](/docs-images/93/112329278/images/414-3.jpg "스웨덴일렉트로룩스등유럽가전업체에서주도하던로봇청소기는 2013년부터다양한산업에서로봇청소기시장에뛰어들며본격적으로고급화가시작됨 - 인공지능, AR 등최신기능을탑재한다양한제품이출시및개발되며청소기관련연구개발")
 을통해더욱최첨단기능을갖춘제품들이출시될전망임")
414 기술개발테마현황분석 3. 기업분석 가. 주요기업비교 시장점유율이큰청소로봇에대한경쟁환경분석 세계에서가장큰로봇청소기업체 : irobot - 현재글로벌로봇청소기시장에서약 70% 의높은점유율을보이고있는 irobot은스마트홈통합과함께클라우드기반스마트폰앱으로서비스를제공하며, 소비자들의편의성과높은흡입력으로로봇청소기의단점을보완함 - 로봇청소기뿐만아니라바닥청소로봇, 수영장청소로봇, 교육용로봇, 병원용등다양한분야에서로봇을사용하는데일조하고있는 irobot은인공지능 (AI) 을통해제품을계속진화시키고있음 - irobot은스마트홈이향후중요한트렌드로자리잡을것이라예상하며간편하고, 자동화, 개인화된 3세대스마트홈에초점을맞춰제품개발및출시에주력할것으로예상됨 [ irobot 로봇청소기 Roomba 제품중일부모델 ] 로봇청소기시장폭발적성장, 대기업앞다투어진출및연구개발투자증가 - 기존영국다이슨, 스웨덴일렉트로룩스등유럽가전업체에서주도하던로봇청소기는 2013년부터다양한산업에서로봇청소기시장에뛰어들며본격적으로고급화가시작됨 - 인공지능, AR 등최신기능을탑재한다양한제품이출시및개발되며청소기관련연구개발 (R&D) 투자도꾸준히증가하고있음 - 맞벌이, 1인가구, 애완동물을기르는가구, 신혼부부등이점차늘어남에따라로봇청소기시장에도긍정적인영향을미칠것으로전망됨. 삼성전자, LG 등기술력을갖춘대기업들이점차성장하고있는로봇청소기시장에관심을가지며제품을출시하고있으며, 꾸준한연구개발 (R&D) 을통해더욱최첨단기능을갖춘제품들이출시될전망임 다양한마케팅으로제품의가시성확보및유통채널다각화필요 - 로봇청소기의수요가증가하고있지만제품을구매하는주요소비층은밀레니엄세대로, 제품마케팅을위해서는 SNS, 온라인등의유통채널을통해제품을알리고장점을강조하는전략이필요함 - 높은가격대로제품구매를망설이는소비자들을공략하기위해서는최첨단기능을탑재한제품보다, 특정기능을더욱강화하고제품의가격경쟁력을확보하는것이좋은방안이될것으로보임 406
415 가전로봇 - 백화점, 대형유통업체매장판매뿐만아니라온라인, 홈쇼핑등을통해제품을판매해다양한유통채널을확보하는것이필요할것으로전망됨 향후청소기시장에서로봇청소기제품인기지속전망 - 최신기술을탑재한다양한로봇청소기제품이꾸준히출시되면서기존의단점으로뽑히던흡입력, 충전주기, 청소력에대한보완이이루어지고, 소비자들의좋은반응이이어질것으로전망됨 - 부담스러운가격대로구매를고민하던소비자들을위해부담없이구매할수있는 100달러, 200달러로봇청소기제품군이증가하면서향후로봇청소기를사용하는소비자들이더욱증가할것으로보임 [ 제품분류별주요기업 ] 구분 경쟁환경 기술분류로봇부품및부분품로봇제품로봇서비스 주요품목및기술 각종센서, 카메라모듈, 영상처리모듈, 음성처리모듈, 모터제어기, 모터 / 액추에이터, 배터리, 메커니즘모듈, 주행모듈, 머니퓰레이터모듈, 조작모듈, 로봇용소프트웨어 청소서비스로봇, 생활지원로봇, 홈케어로봇 네트워크연동서비스, 영상 / 음성처리서비스, 홈모니터링서비스, 원격제어서비스, IoT 연동서비스, 해외기업 maxon motor, Kollmorgen, Sharp, Murata, Sony, DFR, SICK AG, Hokuyo, Electrolux, Kärcher, irobot,evolution Robotics, Dyson, Friendly Robotics, Husqvarna, Xiaomi, Vileda Google, Softbank, AT&T, Verizon, Telefonica, Deutsche Telecom 국내기업 누리로봇, 하이젠모터, 광전자, 레이닉스, 센서텍, 하기소닉, 얄리한국 LPS 휴앤텍, 엠씨넥스, 마이크로인피니티, 로보큐브테크, 피플앤드테크놀러지 SKC, LG 화학, 코캄배터리, 이레텍 삼성전자, LG 전자, 유진로봇, 파인로보틱스, 알에프, 에브리봇, 아이로, 바램시스템, 한국설제, 코어벨 SK 텔레콤 /SK 브로드밴드, LG U+, KT, 네이버랩스, 바램시스템 국내중소기업사례 레드원테크놀러지는로봇센서, 모터, 기구학, 자율주행등의종합적인교육 / 연구활동에적합한실내용이동로봇플랫폼보유. 얼굴인식이가능한클라우드기반의에이전트로봇개발 로보티즈는유아부터성인전문가까지모든세대에대응하는각각의로봇제품을제작판매중이며자체개발한로봇플랫폼 ( 다이나믹셀 ) 제공 바램시스템은세계최초홈 CCTV 로봇인앱봇링크, 앱봇링크의 2세대인앱봇라일리등으로 2016년에만 1만대, 100만달러수출달성 유진로봇은청소용로봇, 교육용로봇, 연구용로봇, 재난구조로봇등다양한로봇들을제조판매하고있으며한국로봇산업진흥원의지능형로봇품질인증획득 407
416 기술개발테마현황분석 파인로보틱스는세계최초로복합형청소기 ' 센스봇 ' 을출시하여국내는물론전세계에수출을하게 됨. 최근두바이정보통신박람회 (GITEX) 2017 에참가해센스봇을비롯한독자기술력제품을소개 [ 주요중소기업비교 ] ( 단위 : 백만원,%) 국내업체자산총계매출액 매출액증가율 영업이익율당기순이익율 R&D 집중도 레드원테크놀러지 2,340 2, 로보티즈 24,910 15, 바램시스템 1,313 2, 유진로봇 37,919 36,
417 가전로봇 나. 주요업체별기술개발동향 2017 년세계가전전시회 (CES) 에참가한로봇업체의최근가전로봇기술적용최근제품을 중심으로아래표로정리함 [ 가전로봇목록 ] 제품제조사내용 잔디깎이로봇로봇공기청정기리틀아이가드로보버디로봇맥스해바라기로봇폴디메이트 LG 전자 코웨이 아이보튼로보틱스 ( 중국 ) 에이브림엔터프라이즈 ( 미국 ) 포컬맥스테크놀로지 ( 중국 ) 쉐이드크래프트 ( 미국 ) 폴디메이트 ( 이스라엘 ) 센서및범퍼, 알고리즘을통해자신과장애물의위치를확인함으로써안전성및절단성능을극대화 울타리등의장애물을발견하면자동으로속도를줄여충돌을피함 오염지역을자동으로찾아가정화하는로봇공기청정기 주방, 거실등에따라달라지는실내공기오염도를분석 영아의위험상황경보, 침입경보, 원격대화, 지능형캡처등이가능 이미지및음성분석을통해아이가위험에노출된경우, 일정데시벨이상으로아이가울경우스마트폰앱과연동해경고를보냄 스마트폰및태블릿과연동해집내부를모니터링할수있는가정경비용로봇 가벼운물건운송도가능하며, 내장형 720p 카메라를탑재 24시간보안및홈모니터링은물론스케줄관리, 화상회의, 프로젝터기반의영상송출이가능한가정경비용로봇 로봇의모든기능은모바일과연동해컨트롤이가능하며, 자율충전기능도탑재 세계최초로태양을추적해자동으로그늘을만들어주는로봇 해변에서도활용이가능하며, 가전제어및원격모니터링기능을가지고있음 음성명령이가능하며태양열로충전됨 세탁물정리및의류의주름을제거해주는로봇 의류를개는속도는 10초, 주름제거시에는 20~30 초가소요됨 가정에적합한작은사이즈가특징 Desktop Companion Robot 파나소닉 ( 일본 ) 달걀처럼둥근모양의자연어대화가갈능한커뮤니케이션로봇 음성제어와와이파이를지원하며클라우드에접속해정보검색가능 8M 픽셀카메라와프로젝터, 적외선센서를내장 루미젠트 유니봇 세레보 ( 일본 ) 에코박스로보틱스 ( 중국 ) 사진촬영및화상회의가가능한스탠드램프 자동으로움직이며, 4개의모터, 8M 픽셀카메라를탑재 음성인식은물론사용자를자동으로감지하며책상자료를캡처가능 바닥청소, 공기정화, 집안감시, 원격제어 등의 다기능을 탑재한로봇청소기 적외선거리 센서, 출입문 센서, 창문 센서, 공기질 측정 센서, 습기센서등의각종센서들이탑재되어있어바닥 청소, 공기정화, 집안감시등이가능 409
418 기술개발테마현황분석 4. 기술개발현황 가. 기술개발이슈 최신지능로봇플랫폼기술개발동향 ( 로봇미들웨어 ) 일본의소니, 혼다등의기업이나연구기관들에서개인용로봇의제어하드웨어플랫폼과미들웨어의기술개발을추진하고있는중임 - 일본과미국 RTI사가로봇의미들웨어를 OMG에서제안, 표준화진행중 - 정통부의 URC 로봇사업을중심으로 CORBA 기반의로봇미들웨어진행 - 인간기능생활지원지능로봇기술개발사업단에서 UPnP기반의로봇미들웨어개발진행 - 실시간운영체제는임베디드 OS로개발되어미들웨어와통합된실시간 OS의개발이이루어질것으로예상 ( 환경및상황인식기술 ) 환경모델링기술은각감지모달리티로부터들어오는신호로부터물체를판별하고인식하는기술이개발중임. 이기술은차후주변의환경과상황을인식할수있는기술로확장되어나갈것이며, 로봇이움직이는상황에서다중물체를추적할수있는기술로개발될것임 - 물체인식기술단계에서부터물체정보및환경정보데이터베이스의접근방법과구조를표준화하여재사용성과호환성을확립하는것필요 ( 로봇소프트웨어아키텍처및라이브러리 ) 국내지능형로봇표준포럼및 TTA에서각로봇의모듈에대한인터페이스단체규격수립 (URC 장치추상화를위한공통로봇인터페이스프레임워크 ) - 로봇아키텍처 / 라이브러리는 OMG를중심으로고수준의장치추상화와컴포넌트의표준화가이루어지고있음 인간-로봇인터페이스분야 사용자인터페이스기술 - 현재인간과로봇간의단일모달리티상호작용기술로부터점차비전, 음성, 촉각, 매개등인간의다양한의사전달매체를지원할수있는멀티모달상호작용기법과상호작용채널을통해들어오는정보를통합하는멀티모달통합기술의개발이진행될것으로전망 - 멀티모달통합기술은인지기술, 감정상호작용기술들의개발과함께발전해나갈것임 얼굴 / 표정인식및학습기술 - 사용자의얼굴을인식하여, 표정을파악하거나신원을파악하는기술의개발임 - 얼굴에대한데이터베이스화기술과 API를표준화하여데이터베이스에구축에부담을줄이고개발효율성을증대 감시로봇, 안내로봇등에서음성인식기술이개발과더불어음성내에포함된화자의신원정보를파악하여이용하는화자인식기술이개발중 - 로봇이인간사용자와친밀한관계를지속하여사회-정서적으로상호작용을유지할수있는지에대한연구및효과적인상호작용설계기술이활발하게진행될것으로예상 410

419 가전로봇 환경및네트워크기술 디지털홈네트워크연동기술 - 가정의디지털홈기기를제어하고가정을감시하는기능을가진로봇개발중 - 현재디지털홈네트워크기술의개발이활발히진행중이나개발그룹에따라서로다른미들웨어사용으로호환성이없음 - 디지털홈네트워크에접근하고연동하는프로토콜기술개발과디지털홈네트워크프로토콜의표준화가서로연동되어개발되는중 - 디지털홈네트워크에서의로봇의위상의정립과역할및권한에대한합의와연동프로토콜의개발필요 로봇네트워크통신프로토콜기술 - 유비쿼터스환경에서로봇 / 서버간의통신프로토콜이개발됨 [ 네트워크연계가전로봇기술 ] 성능평가및안전성기술 기능및성능평가기술 - 로봇의시각, 음성, 촉각구동기등각모듈들이개발됨에따라이들에대한신뢰성을확보하기위해모듈의성능을평가하는방법에대한표준화작업이이루어져야함 - 각모듈 / 기능에대한성능평가기술이확립되면이들에대한표준평가시스템및플랫폼이개발되리라전망이며, 로봇시장이커짐에따라생산된제품의성능을평가하는방법개발이이루어질것임 411
420 기술개발테마현황분석 신뢰성 / 안전성확보및평가기술 - 중소기업을중심으로청소로봇의개발및보급이확산되고있음 - 인간기능생활지원지능로봇기술개발사업단에서노약자 / 재활치료필요자의감각및자세균형기능증진등을도와주는재활로봇의연구개발이활발히진행중임 - 로봇의인간에대한안전성의보장이절실히요구되고있으나아직지능형서비스로봇의안전성에관한국제 / 국내표준이전무한실정 - 현재 ISO/TC184에서산업용로봇의안전성에대한표준을넓은범위로개정중에있음 - 국제 / 국내적으로로봇의안전성에대한표준이가장이루어져야하며, 안전기준의수립후, 안전성평가에대한표준, 로봇의신뢰성평가에대한기준작업이이루어질것임 412
421 가전로봇 나. 특허동향분석 가전로봇특허상주요기술 주요기술 가전로봇은크게외부신호인식 / 판단기술과인간로봇연결기술로분류될수있고, 외부신호인식 / 판단기술은음성인식 / 합성기술과영상인식 / 감정기술, 상황인지및판단기술, 위치인식및자율주행, 장애물파악및회피기술로, 인간로봇연결기술은네트워킹기술과하이브리드앱기술로분류됨 분류요소기술설명 음성인식 / 합성기술 영상인식 / 감정기술 사용자의음성을인식하여사용자를인증하고, 음성을합성하는기술 촬영영상을통한영상 ( 감정 ) 인식기술 외부신호인식 / 판단기술 환경신호기반의상황인지및판단기술 위치인식및자율주행기술 시스템에구성되어있는센서들로부터수집된환경데이터를분석하여로봇이처한환경을판단할수있는지능을개발 운용영역에서의자기혹은목표지점위치인식및효율적주행경로파악과작성능력 장애물파악및회피기술 주행중예기치못한물체에대해이동성파악및회피기술 인간로봇연결기술 네트워킹기술 하이브리드앱기술 가정내에서로봇과가전제품과인간사이의통신관련기술 가정내로봇과인간의조작성을이어주는모바일기반앱개발기술 413
422 기술개발테마현황분석 세부분야별특허동향 주요기술별국가별특허동향 가전로봇의요소기술별주요국가별특허정보데이터입수하였으며, 최근 10 년간의특허데이터를 비교분석함 분류요소기술한국미국일본유럽계 음성인식 / 합성기술 영상인식 / 감정기술 외부신호인식 / 판단기술 환경신호기반의상황인지및판단기술 위치인식및자율주행기술 장애물파악및회피기술 인간로봇연결기술 네트워킹기술 하이브리드앱기술 합계 국가별요소기술별특허동향에서음성인식 / 합성기술은일본이가장많은비중을차지하고있음 위치인식및자율주행기술과장애물파악및회피기술, 영상인식 / 감정기술은한국이가장높은비중을차지하고있으며, 이는엘지전자와삼성전자등의한국가전기업의로봇청소기관련특허가높은비중을차지하기때문인것으로판단됨 인간로봇연결기술은상대적으로미국의비중이매우높게나타나며, 미국에특허출원이많은출원이집중되어가장활발한연구가이루어지고있음을알수있음 414
423 가전로봇 주요기술별출원인동향 세부분야요소기술기술집중도주요출원인국내특허동향 음성인식 / 합성기술 SONY HONDA MOTOR 출연연과대기업중심 한국전자통신연구원, 삼성전자, 엘지전자 한국전자통신연구원 출연연과대기업중심 영상인식 / 감정기술 SONY 한국전자통신연구원, HONDA MOTOR 삼성전자, 엘지전자 외부신호인식 / 판단기술 환경신호기반의상황인지및판단기술 HONDA MOTOR 한국전자통신연구원 SONY 출연연과대기업중심 한국전자통신연구원, 삼성전자, 삼성중공업 위치인식및자율주행기술 엘지전자 삼성전자 유진로봇 로봇청소기업체중심 엘지전자, 삼성전자, 유진로봇 장애물파악및회피기술 엘지전자 삼성전자 TOYOTA MOTOR 출연연과대기업중심 엘지전자, 삼성전자, 한국전자통신연구원 인간로봇연결기술 네트워킹기술 엘지전자 다이슨 도시바 INTEL 대기업과출연연중심 엘지전자 한국전자통신연구원, 한국생산기술연구원 출연연과대학교중심 하이브리드앱기술 HONDA MOTOR 한국전자통신연구원, 한국전자통신연구원 인하대학교, 성균관대학교 : 400 건이상, : 300~399 건, : 200~299 건, : 100~199 건, : 100 건미만 외부신호인식 / 판단기술분야주요출원인동향 음성인식 / 합성기술분야는 SONY가가장많은특허를보유하고있으며그다음으로는 HONDA MOTOR, NEC 등이많은특허를보유하고있는등일본회사들이주류를이루고있음 영상인식 / 감정기술분야는한국전자통신연구원이가장많은특허를보유하고있으며그다음으로는 SONY, HONDA MOTOR, 등이많은특허를보유하고있음 환경신호기반의상황인지및판단기술분야는 HONDA MOTOR이가장많은특허를보유하고있으며그다음으로는한국전자통신연구원, SONY, 등이많은특허를보유하고있음 위치인식및자율주행기술분야는엘지전자가가장많은특허를보유하고있으며그다음으로는삼성전자, 유진로봇, 등이많은특허를보유하고있음 415
424 기술개발테마현황분석 장애물파악및회피기술분야는엘지전자가가장많은특허를보유하고있으며그다음으로는 삼성전자, TOYOTA MOTOR, 등이많은특허를보유하고있음 인간로봇연결기술분야주요출원인동향 네트워킹기술분야는엘지전자가가장많은특허를보유하고있으며그다음으로는다이슨, 도시바, 등이많은특허를출원하고있음 하이브리드앱기술분야는 INTEL이가장많은특허를보유하고있으며그다음으로는 HONDA MOTOR, 한국전자통신연구원, 등이많은특허를보유하고있는등대학및출연연이주류를이루고있음 가전로봇분야의주요경쟁기술및공백기술 가전로봇분야의주요경쟁기술은외부신호인식 / 판단기술에포함되는세부기술들로 나타났으며그중에서도위치인식및자율주행기술이가장경쟁적인기술로나타남 공백기술은전반적으로인간로봇연결기술로나타나며, 그중에서도하이브리드앱기술로나타남 세부분야요소기술기술집중도 외부신호인식 / 판단기술 음성인식 / 합성기술영상인식 / 감정기술환경신호기반의상황인지및판단기술위치인식및자율주행기술 장애물파악및회피기술 인간로봇연결기술 네트워킹기술 하이브리드앱기술 : 400 건이상, : 300~399 건, : 200~299 건, : 100~199 건, : 100 건미만 416
425 가전로봇 최신국내특허기술동향 세부분야요소기술최근핵심요소기술동향 외부신호인식 / 판단기술 음성인식 / 합성기술 영상인식 / 감정기술 환경신호기반의상황인지및판단기술 위치인식및자율주행기술 대화형음성인식기술 최적화된음소를 추출하고 추출된 음소와 미리 저장된 다수개의단어를매칭하여사용자의음성을인식하는기술 얼굴영역을 기준으로 다른 동작을 측정하여 일상적인 노이즈동작을제거하는기술 영상을통해 감정을 인식하여 로봇이 주어진 역할을 수해할수있게하는기술 스캔방식의센서를활용해특징점을추출하는기술 주변환경과로봇의 동작환경을 모두 고려하여 예측하는 기술 순차적인 2차원정보를통해 3차원영상매칭기술 ADoG 기반 특징점을 이용한 이동 로봇의 위치를 인식하는기술 에지프로파일에존재하는면적의대칭성을기반하는기술 인간로봇연결기술 장애물파악및회피기술 네트워킹기술 하이브리드앱기술 카메라와적외선센서를이용한벽면이동로봇의장애물 인식기술 위치의불확실성을고려하여이동경로를산출하는기술 로봇이자체적으로해결할수없는경우홈네트워크를 제어하여해결하는기술 로봇들간의협업으로각로봇이가진리소스를최대한 낭비없이효율적으로활용하는기술 로봇의이동성을 이용해 사용자와 로봇간의 상호작용을 통한정보수집 로봇과사용자의 상호작용 능력요소를 기초로 제어하는 기술 국내특허동향을살펴보면대기업과출연연을중심으로가전로봇기술을집중적으로 연구개발하고있으며, 인간로봇연결기술중하이브리드앱기술은대학교및출연연을 중심으로연구개발을진행중으로나타남 417
426 기술개발테마현황분석 중소기업특허전략수립방향및시사점 가전로봇분야의공백기술분야는하이브리드앱기술이고중소기업의시장진입상대적으로수월한분야또한하이브리드앱기술로나타남 가전로봇분야는가전대기업인엘지전자, 삼성전자, SONY와전통적으로로봇기술에관심이많은일본자동차업계를중심으로연구개발이진행되고있음 향후중소기업은상대적으로경쟁이치열하지않은하이브리드앱기술을공공연구기관과대학교의기술을이전받거나공동으로연구개발하여제품화하는특허전략을수립하는것이바람직할것으로사료됨 특히하이브리드앱기술은한국전자통신연구원과인하대학교, 성균관대학교가보유한기술을바탕으로기술을개발하여공동으로연구개발을추진하는것을우선적으로고려해볼수있을것으로판단됨 418
427 가전로봇 5. 연구개발네트워크 가. 연구개발기관 / 자원 연구개발기관 가전로봇분야주요연구개발기관 전자부품연구원정보통신미디어연구본부 ( 본부장이규복 ) - 모빌리티플랫폼연구센터 : 무인이동체센싱신호처리 IP 기술, 무인이동체보안기술, 무인이동체제어플랫폼및서비스기술, 무인이동체지능정보플랫폼기술 한국로봇융합연구원 ( 원장박철휴 ) - 특수목적서비스로봇핵심요소기술, 로보틱우대장치기술개발 - 유리창청소로봇개발 파인로보틱스 - 10년이상로봇청소기를개발해판매중이며, 내년로봇공기청정기가판매예정 - 습 건식청소로봇, 하이브리드청소로봇, 로봇공기청정기등다양한로봇개발경험이있으며, 로봇주행및매니플레이션에대한메커니즘설계기술, 로봇용임베디드환경에최적화된디지털회로설계기술등지능형로봇제품개발역량보유 유진로봇 - iclebo 시리즈의청소로봇을개발하여판매중이며 NST 주행알고리즘을향상시키는등성능을향상시키고, 청소능력이 110배강화된프리미엄청소로봇아이클레보오메가를비롯해디즈니 (Disney) 와콜라보레이션제품인마블아이언맨등으로국내청소로봇시장을리드하는중 - 올해산업통상자원부로부터 우수기술연구센터 (ATC) 로신규지정됨 알에프 - 국제전자제품박람회 (CES) 2017에서유리창청소로봇인 윈도우메이트 를출품하여 CES 혁신상 을수상 - 윈도우메이트는강력한네오디뮴자석을이용해창문에부착하는로봇으로강한외부충격에도추락하지않도록설계되었으며, 배터리잔량부족등작동이어려운환경에서는최초부착위치로돌아오는인공지능을탑재하고있음 - 알에프는일본유통업체인 SODC와 429만달러규모의현지수출계약을체결하고이를시작으로유럽유리창청소로봇시장에진출할계획 에브리봇 - 생활로봇전문엔지니어가연구개발하며물걸레청소에최적화된청소메커니즘및주행알고리즘이적용된물걸레전용로봇청소기, 진공흡입과물걸레청소기능및내비게이션기능이탑재된하이브리드로봇청소기, IoT/IoE 기반혁신적홈서비스로봇을개발 - 비전센서를장착하여로봇의정확한위치인식및자율주행이가능한스마트비전매핑기술, 단일 Wide-range&Long-distance Laser를사용하여장애물의위치및거리를카메라로인식하는광폭센싱기술등로봇청소기에최적화된특화기술을보유 419
428 기술개발테마현황분석 연구개발자원 국가연구개발지원사업 중소벤처기업부 - 중소기업기술혁신사업 - 상용화기술개발사업 ( 구매조건부등 ) - 융복합기술개발사업 - 산학연협력기술개발사업 - 제품서비스기술개발사업 - 중소기업 R&D 역량제고사업 - 제품 공정개선기술개발사업 - 맞춤형기술파트너지원사업 - 산연전용과제 : 우수 R&D 인프라를활용한대표적인중소기업지원연구기관으로연구부서와중소기업간연계를통한기술지원은물론변리사, 산학연협력코디네이터, 기술거래사, 기술가치평가사등기술사업화관련전담인력이사업화사안마다관여해고품질비즈니스컨설팅제공 산업통상자원부 - 에너지 자원기술개발사업 - 전략핵심소재기술개발사업 - 신재생에너지기술개발사업 - 산업융합원천기술개발사업 - 로봇미래전략 (2013~2022) - 산업엔진프로젝트 (19대미래성장동력 ) - 사업화연계기술개발사업 ( 민간투자연계형등 ) - 인공지능의응용 산업화촉진을위한지원 로봇산업정책협의회 - 창의적 도전적로봇연구촉진을위한풀뿌리지원프로그램 한국로봇산업진흥원 - 로봇산업클러스터 : 센터와장비를구축하고, 기술사업화촉진및로봇창업맞춤형지원과상용화기술개발지원을통해의료, 사회안전, 제조분야의로봇산업육성을목표로함 - 로봇활용중소제조공정혁신지원사업 : 로봇을활용한중소제조공정혁신으로국내중소제조업의생산성향상, 고부가가치화등제조경쟁력강화와국내로봇기업경쟁력제고및로봇산업규모확대를지원하는사업으로수요기업당국비최대 3~10억원지원 ( 총사업비 50% 이내 ) 및민간부담금국비 50% 이상현금매칭으로경제적지원 420
429 가전로봇 중소기업대상시설및장비지원 중소기업전용연구시설 (Rental Lab) ( 한국생산기술연구원 ) - 공동연구수행및장비를효율적으로이용하고자하는중소 중견기업에게연구공간을제공하고, 연구원인프라 ( 인력, 장비등 ) 를활용한근접지원을통해기업의생산성및경쟁력을높이고있음 실용화중심의로봇중소기업부설연구소 ( 한국로봇융합연구원 ) - 국내로봇기업의경쟁력강화를위해공동연구개발 기술자문 장비이용등맞춤형기업지원서비스제공 - 지능형로봇개발및제품상용화촉진사업 / 로봇융합비즈니스사업 / 경북특화산업로봇융합사업 / 수요발굴지원단 / 중소기업융 복합기술개발사업 연구장비공동활용지원사업 ( 중소벤처기업부, 한국로봇산업진흥원 ) - 주관기관이보유한연구시설과장비, 소프트웨어를중소기업이공동활용하도록지원 - 연구개발과설계및디자인, 시제품제작, 성능평가, 양산및마케팅에이르는원스톱지원 국가연구시설장비진흥센터 ( 과학기술정보통신부 ) - 장비활용종합포털사이트 ZEUS를통해국가연구시설 장비의활용극대화를위해필요한정보를체계화하고모두가편리하게이용할수있도록최상의서비스를제공 산업기술개발장비공동이용시스템 e-tube ( 산업통상자원부, 한국산업기술평가관리원, 한국에너지기술평가원, 한국산업기술진흥원 ) - e-tube를통해산업기술 R&D에필요한연구장비를보다쉽고, 빠르고, 편리하게이용할수있도록적극지원 지능형로봇테스트베드 ( 한국전자통신연구원 ) - 지능형로봇테스트베드에서로봇시험장비및인프라구축, 로봇시험평가방법개발및시험인증체계구축, 로봇시험평가방법개발및시험인증체계구축, 지능형로봇시험지원서비스제공 421
430 기술개발테마현황분석 나. 연구개발인력 가전로봇분야는전자부품연구원, 한국로봇융합연구원, 한국기계연구원, 한국과학기술연구원 에서주로연구개발을진행하고있음 정부는개방형로봇산업생태계조성을위해인력양성측면에서多기술영역업무수행및 다양한산업분야에서로봇융합을통한신규비즈니스창출이가능한중소기업실무형 로봇전문인력양성추진 [ 가전로봇분야주요연구조직현황 ] 기관전자부품연구원한국로봇융합연구원한국기계연구원한국과학기술연구원충북대학교동의대학교숭실대학교숭실대학교서강대학교세종대학교부산대학교고려대학교 422
431 가전로봇 다. 기술이전가능기술 (1) 기술이전가능기관 가전로봇의요소기술은크게음성인식 / 합성기술, 영상인식 / 감정기술, 네트워킹기술, 위치 인식및자율주행기술, 환경신호기반의상황인지및판단기술, 장애물파악및회피기술의 총여섯개의분류로구분됨 기술이전이가능한기관은한국과학기술원, 한국기계연구원, ( 재 ) 대구경북과학기술원, 충북대학교, 숭실대학교, 서강대학교, 세종대학교, 부산대학교, 고려대학교가있음 [ 가전로봇요소기술연구조직 ] 분류요소기술기관 음성인식 / 합성기술 초저전력유연압전기반음성인식센서 관심음원제거방법및그에따른음성인식방법 한국과학기술원 서강대학교 영상인식 / 감정기술 네트워킹기술 영상인식 기반 인터페이스를 사용하는 콘텐츠 제작 방법 및 시스템 스마트기기가장착된로봇제어시스템및그방법 세종대학교 숭실대학교 위치인식및자율주행기술 레이저스캐너를이용한이동로봇의실내주행시스템및방법 하이드로스테틱서보액추에이터 충북대학교 한국기계연구원 환경신호기반의상황인지및판단기술 홈네트워크서비스제어를위한상황인지서비스제공시스템및방법 부산대학교 장애물파악및회피기술 모바일로봇의장애물회피퍼지제어기 이동로봇의장애물회피시스템 ( 재 ) 대구경북과학기술원 고려대학교 423
432 기술개발테마현황분석 (2) 이전기술에대한세부내용 분류 기술명 세부내용 관심음원제거방법및그에따른음성인식방법 기술이전목적및필요성 기존기술에따른관심음원분리알고리즘을통해출력신호의역엔트로피를최대화하여효과적으로관심음원을추정할수있으나, 이를위해서는이론적으로혼합된음원의개수만큼마이크입력이존재해야만함 실제환경에서혼합된음원의개수만큼마이크를준비하는것은불가능할뿐만아니라준비한다고해도추정할파라미터가너무많아지는문제가있었음 기술활용방안및기대성과 해당기술은다수개의음원으로부터의음향신호가혼합되는환경에설치된두개의마이크를통해제공되는혼합신호에서관심음원을제거하는것을통해혼합된잡음신호를추정할수있는관심음원제거방법을제공하는것을그목적으로함 또한해당기술의다른목적은다수개의음원으로부터의음향신호가혼합되는환경에설치된두개의마이크를통해제공되는혼합신호에서관심음원을제거하는것을통해혼합된잡음신호를추정하고, 이를마이크를통해제공되는혼합신호와비교하여혼합신호에서잡음신호가지배적인영역을구분한후이영역에대해손실특징복원기술을적용하여특징값을복원한음성인식방법을제공하는것임 상기한목적을달성하기위한해당기술에따르는해당기술에따르는관심음원제거방법은, 두개의마이크각각으로부터의입력혼합신호를제공받아단구간푸리에변환하여시간-주파수영역으로변환하는단계 ; 상기시간-주파수영역의입력혼합신호들로부터관심음원을제거하기위한관심음원제거벡터를설정하는단계 ; 상기관심음원제거벡터를이용하여입력혼합신호에서관심음원을제거하여혼합된잡음신호를생성하는단계를구비함을특징으로함 해당기술은다수개의음원으로부터의음향신호가혼합되는환경에설치된두개의마이크를통해제공되는혼합신호에서관심음원을제거하는것을통해혼합된잡음신호를효과적으로추정할수있음 세부문의 기술관련 계약관련 서강대학교 424
433 가전로봇 분류 기술명 세부내용 영상인식기반인터페이스를사용하는콘텐츠제작방법및시스템 기술이전목적및필요성 해당기술은영상인식기반인터페이스를사용하는콘텐츠제작방법및 시스템에관한것임 기술활용방안및기대성과 해당기술에따른영상인식기반인터페이스를사용하는콘텐츠제작방법은, 인터페이스부에배치된인공마커및보조마커를인식하는단계, 인공마커에대응되는오브젝트를화면에표시하는단계, 그리고보조마커에대응하여오브젝트의형태또는동작을변경하여상기화면에표시하는단계를포함함 이와같이해당기술에의하면, 영상인식기술을이용하는인터페이스로콘텐츠제작이이루어지기때문에구상한콘텐츠장면을간단하고빠르게생성및수정할수있으며, 의미기반의마커를사용하기때문에직관적으로오브젝트를생성할수있음 또한마커의조합과움직임을이용하는직관적인명령어로콘텐츠의다양한설정이가능하여연령대에상관없이일반사용자가쉽게콘텐츠를제작할수있는편의성을제공함 기술관련 세부문의 세종대학교 계약관련 425
434 기술개발테마현황분석 분류 기술명 세부내용 레이저스캐너를이용한이동로봇의실내주행시스템및방법 기술이전목적및필요성 본발명은이동로봇의실내주행시스템및방법에관한것으로서, 본발명의레이저스캐너를구비하는이동로봇의실내주행시스템에서, 상기레이저스캐너로부터각도에따라주변환경과의거리를측정한측정점데이터를전송받아, 이데이터로부터불연속점과모서리점으로구성된표식점을추출하는표식점추출부, 상기표식점으로부터이동로봇의경로를생성하기위하여, 이동로봇의좌, 우벽면에위치한벽면표식점을추출하는벽면표식점추출부및상기벽면표식점으로부터이동로봇의이동경로를생성하는경로생성부를포함함 레이저스케너를이용한이동로봇제어방법중자연표식을사용하는방법은별다른외부작업이필요하지않기때문에이를이용한많은방법이연구되고있음 기술활용방안및기대성과 자연표식을사용하여복도를주행할때에는복도라는공간의특성상별다른특징이없기때문에로봇을제어하는데어려움을겪게됨. 즉, 자연표식으로서인식할만한점을찾을수없는문제가발생하게됨 자연표식을사용하여이동로봇을자동으로제어하는방법은표식을스스로인식하여로봇을제어해야하므로, 인식할만한표식이없는환경에서는사용하기힘듦 본발명에의하면복도환경에서다른인공표식이나지형물없이불연속점과모서리점을찾아로봇의경로를설정하여자동으로주행하도록함으로써, 인공표식이나다른지형물을설치하는데드는노력과비용을절감할수있는효과가있음 기술관련 세부문의 충북대학교 계약관련 426
435 가전로봇 분류 기술명 세부내용 홈네트워크서비스제어를위한상황인지서비스제공시스템및방법 기술이전목적및필요성 해당기술은홈네트워크서비스제어를위한상황인지서비스제공시스템에 있어서서비스를수행하는상황인지관리서버를포함함 기술활용방안및기대성과 적어도하나이상의홈네트워크기기와, 홈네트워크내에무작위로분산되어오브젝트의명령, 상태및주변환경이벤트를모니터링하여출력하는다수의센서노드와, 상기홈네트워크기기및다수의센서노드와무선으로연결되어상기홈네트워크기기를제어하고, 상기홈네트워크기기별특성온톨로지 (Ontology) 모델과상황추론규칙에대한정보를등록하고하기의상황인지관리서버에전달하는홈네트워크서버와, 상기홈네트워크서버로부터수신된정보를미리설정된알고리즘 (Algorithm) 을통해추론및해석하여각오브젝트에대한서비스실행및주변환경의특성에따라적응적으로서비스를수행하는상황인지관리서버를포함함을특징으로함 기술관련 세부문의 부산대학교 계약관련 427
436 기술개발테마현황분석 분류 세부내용 기술명 이동로봇의장애물회피시스템 기술이전목적및필요성 해당기술은자율이동로봇의장애물회피시스템에관한것으로유연접촉 감지모듈, 충돌영역산출부, 충돌회피제어부를포함함 기술활용방안및기대성과 상기자율이동로봇의주행가능방향에서상호상이한접촉위치에서장애물과의접촉이가능하도록상기자율이동로봇외측으로돌출되어형성되어장애물과의접촉시탄성적으로변형하여장애물을감지하는다수의유연접촉감지모듈과 ; 상기자율이동로봇의제동거리에기초하여장애물과의충돌가능영역을산출하는충돌영역산출부와 ; 상기다수의유연접촉감지모듈중상기접촉위치가상기충돌가능영역으로부터근접하게벗어난유연접촉감지모듈들의감지결과만을장애물과의접촉으로인식하는충돌회피제어부를포함하는것을특징으로함 이에따라, 상호상이한접촉위치에서접촉이가능한유연접촉감지모듈을이용하여이동로봇의주행속도및 / 또는주행방향에적응적으로장애물과의접촉을감지하여장애물과의충돌을회피할수있음 기술관련 세부문의 고려대학교 계약관련 428
![가전로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 가전로봇분야키워드클러스터링 ] [ 가전로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1.](/docs-images/93/112329278/images/437-1.jpg "Home appliance with supplemental combustion air supply 클러스터 01 home appliance 6~8 apparatus 2. Heating Apparatus, and Steam Generator and Home Appliance Using the Same 3.")
437 가전로봇 6. 기술로드맵기획 가. 중소기업핵심요소기술 (1) 데이터기반요소기술발굴 [ 가전로봇분야키워드클러스터링 ] [ 가전로봇분야주요키워드및관련문헌 ] No 주요키워드연관도수치관련특허 / 논문제목 1. Home appliance with supplemental combustion air supply 클러스터 01 home appliance 6~8 apparatus 2. Heating Apparatus, and Steam Generator and Home Appliance Using the Same 3. Home appliance having detergent compartment 클러스터 02 autonomous vehicle 5~6 1. Celestial navigation system for an autonomous vehicle 2. CELESTIAL NAVIGATION SYSTEM FOR AN AUTONOMOUS VEHICLE 429
438 기술개발테마현황분석 No 주요키워드연관도수치관련특허 / 논문제목 1. A Secure Collaborative Spectrum Sensing Strategy in 클러스터 03 real-time location 7~8 Cyber-Physical Systems 2. Recognition of indoors activity sounds for robot-based home monitoring in assisted living environments 3. Dynamic coordinate method for home return of cleaner robot 1. Single package, indoor air-sourced, basement heat pump for home heating and air conditioning 클러스터 04 home air 6~7 2. Homecare Robots to Improve Health and Well-Being in Mild Cognitive Impairment and Early Stage Dementia: Results From a Scoping Study 3. Ceiling vision localization with feature pairs for home service robots 클러스터 05 cleaning robot 7~8 1. CLEANING DEVICE 2. A novel navigation system for indoor cleaning robot 3. Clean room robots assemble medical devices 1. Method and system for room activity communication 클러스터 06 room controller 5~7 2. Method and system for monitoring room activity 3. Utilizing the Android Robot Controller for robots, wearable apps, and the Hotel Room of the Future 1. Weighted online calibration for odometry of mobile robots 클러스터 07 environment optical-elem ent 7~ rd International Conference on Intelligent System and Applied Material, GSAM Efficient object tracking system using the fusion of a CCD camera and an infrared camera 클러스터 08 base station 7~8 1. Autonomous robot auto-docking and energy management systems and methods 2. On laser diode and wireless communication based interactive docking for home service robots 3. Development of a Real-Time Task Editable Service-Oriented Security Robot 430
439 가전로봇 (2) 요소기술도출 산업 시장분석, 기술 ( 특허 ) 분석, 전문가의견, 중소기업기술수요를바탕으로로드맵기획을 위한요소기술도출 [ 가전로봇분야요소기술도출 ] 분류요소기술출처 음성인식 / 합성기술 영상인식 / 감정기술 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 외부신호인식 / 판단기술 환경신호기반의상황인지및판단기술 위치인식및자율주행기술 장애물파악및회피기술 기술 / 시장분석, 전문가추천 기술수요, 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 전문가추천, 특허 / 논문클러스터링 네트워킹기술 기술 / 시장분석, 전문가추천 하이브리드앱기술 기술 / 시장분석, 전문가추천 로봇팔및손구동기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 상황에따른행위선택기술 기술수요, 기술 / 시장분석, 전문가추천 인간로봇연결기술 가사지원로봇용 HRI 표준화기술 기술 / 시장분석, 전문가추천 명령전달기술 기술수요, 기술 / 시장분석, 전문가추천 학습지능기술 기술 / 시장분석, 전문가추천 이종통신망상호운영성관련기술 기술 / 시장분석, 전문가추천 다양한정보기기와의연동기술 기술 / 시장분석, 전문가추천, 특허 / 논문클러스터링 431
440 기술개발테마현황분석 (3) 핵심요소기술선정 확정된요소기술을대상으로중소기업에적합한핵심요소기술선정 [ 가전로봇분야핵심요소기술 ] 분류핵심요소기술개요 인식 음성인식 / 합성 영상인식 / 감정 사용자의음성을인식하여사용자를인증하고, 음성을합성하는기술 촬영영상을통한영상 ( 감정 ) 인식기술 통신 네트워킹기술 가정내에서로봇과가전제품과인간사이의통신관련기술 로봇매니퓰레이션로봇팔및손개발기술물건을파지하고이송할수있는능력 이동기술위치인식및자율주행기술자율주행능력 로봇지능 환경인지및판단 로봇혹은가정내에서의환경을판단할수있는지능개발 432

441 가전로봇 나. 가전로봇기술로드맵 최종중소기업기술로드맵은기술 / 시장니즈, 연차별개발계획, 최종목표등을제시함으로써 중소기업의기술개발방향성을제시 433
목 차
 제 2 차지능형로봇기본계획 ( 안 ) (2014~2018) 2014. 7. 관계부처합동 목 차 Ⅰ. 기본계획수립배경 - 1 - < 참고 (1) : 35 년의로봇정책역사 > - 2 - - 3 - Ⅱ. 국내외로봇산업현황및전망 1 세계시장현황및전망 가. 현황 - 4 - 나. 전망 < 참고 (2) : 세계로봇시장규모전망 > - 5 - 2 국내로봇산업현황 - 6 -
제 2 차지능형로봇기본계획 ( 안 ) (2014~2018) 2014. 7. 관계부처합동 목 차 Ⅰ. 기본계획수립배경 - 1 - < 참고 (1) : 35 년의로봇정책역사 > - 2 - - 3 - Ⅱ. 국내외로봇산업현황및전망 1 세계시장현황및전망 가. 현황 - 4 - 나. 전망 < 참고 (2) : 세계로봇시장규모전망 > - 5 - 2 국내로봇산업현황 - 6 -
목 차. 추진근거및경과 1. 로봇산업관련동향 년주요성과분석 5. 년도추진방향 10. 년실행계획 11 < 참고 > 부처별추진과제목록 16
 년지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획
년지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획
목 차. 추진근거및경과 1. 로봇산업관련동향 년주요성과분석 5. 년도추진방향 9. 년실행계획 10 < 참고 > 부처별추진과제목록 16
 년지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획
년지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형지능형로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇로봇실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획실행계획
<C0CCBCF8BFE42DB1B3C1A4BFCFB7E12DB1E8B9CCBCB12DC0DBBCBAC0DAB0CBC1F5BFCFB7E12DB8D3B8AEB8BBB3BBBACEC0DAB0CBC1F52E687770>
 사회복지용 지능로봇 기술동향 머 리 말 목 차 제1장 서 론 1 제2장 기술의 특징 3 제3장 사회복지용 지능 로봇산업의 기술 수요 전망 11 제4장 사회복지용 지능 로봇의 기술 동향 32 제5장 결론 및 정책 제언 103 참고문헌 109 표 목차 그림 목차 제1장 서 론 1. 목적 및 필요성 2. 분석내용 및 범위 제2장 기술의 특징 1. 지능형 로봇기술의
사회복지용 지능로봇 기술동향 머 리 말 목 차 제1장 서 론 1 제2장 기술의 특징 3 제3장 사회복지용 지능 로봇산업의 기술 수요 전망 11 제4장 사회복지용 지능 로봇의 기술 동향 32 제5장 결론 및 정책 제언 103 참고문헌 109 표 목차 그림 목차 제1장 서 론 1. 목적 및 필요성 2. 분석내용 및 범위 제2장 기술의 특징 1. 지능형 로봇기술의
ㅇ ㅇ
 ㅇ ㅇ ㅇ 1 ㆍ 2 3 4 ㅇ 1 ㆍ 2 3 ㅇ 1 2 ㆍ ㅇ 1 2 3 ㆍ 4 ㆍ 5 6 ㅇ ㆍ ㆍ 1 2 ㆍ 3 4 5 ㅇ 1 2 3 ㅇ 1 2 3 ㅇ ㅇ ㅇ 붙임 7 대추진전략및 27 개세부추진과제 제 5 차국가공간정보정책기본계획 (2013~2017) 2013. 10 국토교통부 : 2013 2017 차 례 제 1 장창조사회를견인하는국가공간정보정책
ㅇ ㅇ ㅇ 1 ㆍ 2 3 4 ㅇ 1 ㆍ 2 3 ㅇ 1 2 ㆍ ㅇ 1 2 3 ㆍ 4 ㆍ 5 6 ㅇ ㆍ ㆍ 1 2 ㆍ 3 4 5 ㅇ 1 2 3 ㅇ 1 2 3 ㅇ ㅇ ㅇ 붙임 7 대추진전략및 27 개세부추진과제 제 5 차국가공간정보정책기본계획 (2013~2017) 2013. 10 국토교통부 : 2013 2017 차 례 제 1 장창조사회를견인하는국가공간정보정책
<40C1B6BBE7BFF9BAB85F32BFF9C8A32E687770>
 로봇산업의국내외동향및전망 로봇산업의국내외동향및전망 목차 권구복연구원 Ⅰ. 로봇산업개요 Ⅱ. 세계로봇산업동향및전망 Ⅲ. 국내로봇산업동향및전망 Ⅳ. 국내로봇산업발전애로요인및대응방향 요약로봇은인간을모방하여외부환경을인식하고상황을판단하고자율적으로동작하는기계를의미한다. 로봇은제조용로봇과서비스용로봇으로구분되고, 서비스용로봇은전문서비스용로봇과개인서비스용로봇으로분류된다. 최근제조업의생산성경쟁심화,
로봇산업의국내외동향및전망 로봇산업의국내외동향및전망 목차 권구복연구원 Ⅰ. 로봇산업개요 Ⅱ. 세계로봇산업동향및전망 Ⅲ. 국내로봇산업동향및전망 Ⅳ. 국내로봇산업발전애로요인및대응방향 요약로봇은인간을모방하여외부환경을인식하고상황을판단하고자율적으로동작하는기계를의미한다. 로봇은제조용로봇과서비스용로봇으로구분되고, 서비스용로봇은전문서비스용로봇과개인서비스용로봇으로분류된다. 최근제조업의생산성경쟁심화,
<464B4949B8AEC6F7C6AE2DC0AFBAF1C4F5C5CDBDBABBEABEF7C8AD28C3D6C1BE5FBCD5BFACB1B8BFF8BCF6C1A4292E687770>
 국내 유비쿼터스 사업추진 현황 본 보고서의 내용과 관련하여 문의사항이 있으시면 아래로 연락주시기 바랍니다. TEL: 780-0204 FAX: 782-1266 E-mail: minbp@fkii.org lhj280@fkii.org 목 차 - 3 - 표/그림 목차 - 4 - - 1 - - 2 - - 3 - - 4 - 1) 유비쿼터스 컴퓨팅프론티어사업단 조위덕 단장
국내 유비쿼터스 사업추진 현황 본 보고서의 내용과 관련하여 문의사항이 있으시면 아래로 연락주시기 바랍니다. TEL: 780-0204 FAX: 782-1266 E-mail: minbp@fkii.org lhj280@fkii.org 목 차 - 3 - 표/그림 목차 - 4 - - 1 - - 2 - - 3 - - 4 - 1) 유비쿼터스 컴퓨팅프론티어사업단 조위덕 단장
<B8B6B1D4C7CF2DBAD0BEDFB0CBC5E4BFCF2DB1B3C1A4BFCFB7E128C0CCC8ADBFB5292DC0DBBCBAC0DAB0CBC1F5BFCF2DB8D3B8AEB8BB2DB3BBBACEB0CBC1F52E687770>
 가정용 지능로봇의 기술동향 머리말 목 차 제1장 서 론 1 제2장 기술의 특징 4 제3장 가정용 로봇 산업 및 기술수요 전망 14 4장 가정용 로봇의 기술동향 27 5장 주요국의 가정용 로봇의 기술정책 분석 61 6장 국제표준화와 특허출원 동향 80 7장 결론 및 정책 제언 86 참고문헌 92 표 목차 그림 목차 제1장 서 론 1. 기술동향분석의 목적 및
가정용 지능로봇의 기술동향 머리말 목 차 제1장 서 론 1 제2장 기술의 특징 4 제3장 가정용 로봇 산업 및 기술수요 전망 14 4장 가정용 로봇의 기술동향 27 5장 주요국의 가정용 로봇의 기술정책 분석 61 6장 국제표준화와 특허출원 동향 80 7장 결론 및 정책 제언 86 참고문헌 92 표 목차 그림 목차 제1장 서 론 1. 기술동향분석의 목적 및
목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 목재제품의종류 국내목재산업현황 목재산업트렌드분석및미래시
 목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
한편, 국제로봇연맹(IFR : International Federation of Robotics)이 8.30일 발간한 World Robotics 2012 ( 국제 로봇통계자료)에 따르면, 첨부1 로봇 수출기업 간담회 개요 11년도 세계 제조용 로봇 시장은 자동차 및 전
이 8.30일 발간한 World Robotics 2012 ( 국제 로봇통계자료)에 따르면, 첨부1 로봇 수출기업 간담회 개요 11년도 세계 제조용 로봇 시장은 자동차 및 전") 보도자료 http://www.mke.go.kr 12년 9월 11 일( 화) 석간부터 보도하여 주시기 바랍니다. 자료문의 : 로봇산업과 강감찬 과장(2110-5619), 고상미 사무관(5630) 로봇 - 수출로 글로벌화 시작! - 지경부, 로봇 수출대책 마련 - 청소로봇 품질인증 국제표준화 지원 강화 로봇 수출협의체 구성하여 수출 지원 로보월드 를 아시아 대표
보도자료 http://www.mke.go.kr 12년 9월 11 일( 화) 석간부터 보도하여 주시기 바랍니다. 자료문의 : 로봇산업과 강감찬 과장(2110-5619), 고상미 사무관(5630) 로봇 - 수출로 글로벌화 시작! - 지경부, 로봇 수출대책 마련 - 청소로봇 품질인증 국제표준화 지원 강화 로봇 수출협의체 구성하여 수출 지원 로보월드 를 아시아 대표
Ⅰ Ⅱ Ⅲ Ⅳ
 제 2 차유비쿼터스도시종합계획 국토교통부 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ - 4 - 1 배경및법적근거 2 계획의수립방향 - 3 - 3 계획수립의성격및역할 4 계획수립경위 - 4 - Ⅱ 1 국내외여건변화 가. 현황 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - 나. 문제점및기본방향 - 14 - 2 국내 U-City 현황 가. 현황 -
제 2 차유비쿼터스도시종합계획 국토교통부 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ - 4 - 1 배경및법적근거 2 계획의수립방향 - 3 - 3 계획수립의성격및역할 4 계획수립경위 - 4 - Ⅱ 1 국내외여건변화 가. 현황 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - 나. 문제점및기본방향 - 14 - 2 국내 U-City 현황 가. 현황 -
2010 산업원천기술로드맵요약보고서 - 화학공정소재
 2010 산업원천기술로드맵요약보고서 - 화학공정소재 - 2010. 7 본요약보고서는한국산업기술진흥원주관으 로수립되고있는 2010 년도산업원천기술로 드맵의일부내용을발췌한것입니다. 산업원천기술로드맵전체내용을담은 2010 산업원천기술로드맵보고서 는오는 8월한국산업기술진흥원홈페이지 (www.kiat.or.kr) 를통해공개될예정입니다. 목 차 Ⅰ. 화학공정소재산업의정의및범위
2010 산업원천기술로드맵요약보고서 - 화학공정소재 - 2010. 7 본요약보고서는한국산업기술진흥원주관으 로수립되고있는 2010 년도산업원천기술로 드맵의일부내용을발췌한것입니다. 산업원천기술로드맵전체내용을담은 2010 산업원천기술로드맵보고서 는오는 8월한국산업기술진흥원홈페이지 (www.kiat.or.kr) 를통해공개될예정입니다. 목 차 Ⅰ. 화학공정소재산업의정의및범위
태양광산업 경쟁력조사.hwp
 태양광산업산업경쟁력조사 1 Ⅰ. 1. 52 2. 53 Ⅱ. 1. 54 2. 60 3. 64 III. 1. 71 2. 82 Ⅳ. 1. 98 2. 121 3. 132 Ⅴ. 1. 147 2. 160 3. 169 4. SWOT 181 Ⅵ. 1. 187 2. 202 3. 217 Ⅶ. 225 < 요약 > Ⅰ. 서론 II. 태양광산업의개요 III. 태양광기술개발현황
태양광산업산업경쟁력조사 1 Ⅰ. 1. 52 2. 53 Ⅱ. 1. 54 2. 60 3. 64 III. 1. 71 2. 82 Ⅳ. 1. 98 2. 121 3. 132 Ⅴ. 1. 147 2. 160 3. 169 4. SWOT 181 Ⅵ. 1. 187 2. 202 3. 217 Ⅶ. 225 < 요약 > Ⅰ. 서론 II. 태양광산업의개요 III. 태양광기술개발현황
( 1 ) ( 2 )
 ( 2 )") 보건의료기술육성기본계획 ( 13 17) 2016 년시행계획 ( 안 ) ( 1 ) ( 2 ) 0 비전중장기 5대추진전략 국민건강 G7 선진국도약 - 2020 건강수명 75 세시대 달성 - 건강 R&D 투자지속적확대 글로벌수준의기술개발을위한선택과집중 성과창출형 R&D 지원시스템고도화 연구생태계조성 건강산업촉진을위한제도개선 건강 R&D 투자지속적확대 보건의료 R&D
보건의료기술육성기본계획 ( 13 17) 2016 년시행계획 ( 안 ) ( 1 ) ( 2 ) 0 비전중장기 5대추진전략 국민건강 G7 선진국도약 - 2020 건강수명 75 세시대 달성 - 건강 R&D 투자지속적확대 글로벌수준의기술개발을위한선택과집중 성과창출형 R&D 지원시스템고도화 연구생태계조성 건강산업촉진을위한제도개선 건강 R&D 투자지속적확대 보건의료 R&D
‘17년 로봇 R&D 방향
 AI 기반로봇연구및산업동향 2018-07-17 KDB 산업은행세미나 지능형로봇 PD 김경훈 한국산업기술평가관리원 1 1 일상생활에들어온로봇 2 산업용로봇 수평다관절로봇 자동차공장차체조립라인 수직다관절로봇 직교좌표로봇 병렬형로봇 LCD 이송로봇 양팔로봇 협동로봇 웨이퍼이송로봇 3 서비스로봇 복강경수술로봇 무릎관절수술로봇 재활로봇 장애인보행보조로봇 착유로봇 물류운반로봇
AI 기반로봇연구및산업동향 2018-07-17 KDB 산업은행세미나 지능형로봇 PD 김경훈 한국산업기술평가관리원 1 1 일상생활에들어온로봇 2 산업용로봇 수평다관절로봇 자동차공장차체조립라인 수직다관절로봇 직교좌표로봇 병렬형로봇 LCD 이송로봇 양팔로봇 협동로봇 웨이퍼이송로봇 3 서비스로봇 복강경수술로봇 무릎관절수술로봇 재활로봇 장애인보행보조로봇 착유로봇 물류운반로봇
**09콘텐츠산업백서_1 2
 2009 2 0 0 9 M I N I S T R Y O F C U L T U R E, S P O R T S A N D T O U R I S M 2009 M I N I S T R Y O F C U L T U R E, S P O R T S A N D T O U R I S M 2009 발간사 현재 우리 콘텐츠산업은 첨단 매체의 등장과 신기술의 개발, 미디어 환경의
2009 2 0 0 9 M I N I S T R Y O F C U L T U R E, S P O R T S A N D T O U R I S M 2009 M I N I S T R Y O F C U L T U R E, S P O R T S A N D T O U R I S M 2009 발간사 현재 우리 콘텐츠산업은 첨단 매체의 등장과 신기술의 개발, 미디어 환경의
수출및수입액현황 (2016) 6억 1,284 만달러억 1 7,045 만달러 4억 4,240 만달러 2015 년대비 15.4 % 증가 2015 년대비 11.1 % 증가 2015 년대비 1.3 % 증가 수출액 수출입차액 수입액 지역별수출액 ( 비중 ) 일본 4,129만달러
 6억 1,284 만달러억 1 7,045 만달러 4억 4,240 만달러 2015 년대비 15.4 % 증가 2015 년대비 11.1 % 증가 2015 년대비 1.3 % 증가 수출액 수출입차액 수입액 지역별수출액 ( 비중 ) 일본 4,129만달러") 국내캐릭터산업현황 사업체수및종사자수 사업체 종사자 2,069 개 2,213 개 30,128 명 33,323 명 2015 년 7.0 % 10.6 % 증가증가 2016년 2015년 2016 년 매출액및부가가치액 매출액 부가가치액 11 조 662 억원 4 조 3,257 억원 10 조 807 억원 3 조 9,875 억원 2015 년 9.8 % 8.5 % 증가증가 2016년
국내캐릭터산업현황 사업체수및종사자수 사업체 종사자 2,069 개 2,213 개 30,128 명 33,323 명 2015 년 7.0 % 10.6 % 증가증가 2016년 2015년 2016 년 매출액및부가가치액 매출액 부가가치액 11 조 662 억원 4 조 3,257 억원 10 조 807 억원 3 조 9,875 억원 2015 년 9.8 % 8.5 % 증가증가 2016년
 목 차 2012-5 - 7) - 6 - - 7 - 직업교육의메카, 명품신성인양성 1 사업명 - 8 - 2 필요성및목적 - 9 - 직업교육의메카, 명품신성인양성 - 10 - - 11 - 직업교육의메카, 명품신성인양성 - 12 - - 13 - 직업교육의메카, 명품신성인양성 2-1 필요성 - 14 - 2-2 목적 3 사업내용총괄 3-1 사업개요 - 15 - 직업교육의메카,
목 차 2012-5 - 7) - 6 - - 7 - 직업교육의메카, 명품신성인양성 1 사업명 - 8 - 2 필요성및목적 - 9 - 직업교육의메카, 명품신성인양성 - 10 - - 11 - 직업교육의메카, 명품신성인양성 - 12 - - 13 - 직업교육의메카, 명품신성인양성 2-1 필요성 - 14 - 2-2 목적 3 사업내용총괄 3-1 사업개요 - 15 - 직업교육의메카,
목 차 < 요약 > Ⅰ. 검토배경 1 Ⅱ. 반도체산업이경기지역경제에서차지하는위상 2 Ⅲ. 반도체산업이경기지역경제에미치는영향 7 Ⅳ. 최근반도체산업의여건변화 15 Ⅴ. 정책적시사점 26 < 참고 1> 반도체산업개관 30 < 참고 2> 반도체산업현황 31
 반도체산업이경기지역경제에 미치는영향및정책적시사점 한국은행경기본부 목 차 < 요약 > Ⅰ. 검토배경 1 Ⅱ. 반도체산업이경기지역경제에서차지하는위상 2 Ⅲ. 반도체산업이경기지역경제에미치는영향 7 Ⅳ. 최근반도체산업의여건변화 15 Ⅴ. 정책적시사점 26 < 참고 1> 반도체산업개관 30 < 참고 2> 반도체산업현황 31 i / ⅶ ii / ⅶ iii / ⅶ iv
반도체산업이경기지역경제에 미치는영향및정책적시사점 한국은행경기본부 목 차 < 요약 > Ⅰ. 검토배경 1 Ⅱ. 반도체산업이경기지역경제에서차지하는위상 2 Ⅲ. 반도체산업이경기지역경제에미치는영향 7 Ⅳ. 최근반도체산업의여건변화 15 Ⅴ. 정책적시사점 26 < 참고 1> 반도체산업개관 30 < 참고 2> 반도체산업현황 31 i / ⅶ ii / ⅶ iii / ⅶ iv
UDI 이슈리포트제 18 호 고용없는성장과울산의대응방안 경제산업연구실김문연책임연구원 052) / < 목차 > 요약 1 Ⅰ. 연구배경및목적 2 Ⅱ. 한국경제의취업구조및취업계수 3 Ⅲ. 울산경제의고용계수 9
 / < 목차 > 요약 1 Ⅰ. 연구배경및목적 2 Ⅱ. 한국경제의취업구조및취업계수 3 Ⅲ. 울산경제의고용계수 9") UDI 이슈리포트제 18 호 고용없는성장과울산의대응방안 2009.11. 3. 경제산업연구실김문연책임연구원 052)283-7722 / mykim@udi.re.kr < 목차 > 요약 1 Ⅰ. 연구배경및목적 2 Ⅱ. 한국경제의취업구조및취업계수 3 Ⅲ. 울산경제의고용계수 9 Ⅳ. 고용없는성장지속과대응방안 16 고용없는성장과울산의대응방안 요약문. 2005 5,..,..,..,
UDI 이슈리포트제 18 호 고용없는성장과울산의대응방안 2009.11. 3. 경제산업연구실김문연책임연구원 052)283-7722 / mykim@udi.re.kr < 목차 > 요약 1 Ⅰ. 연구배경및목적 2 Ⅱ. 한국경제의취업구조및취업계수 3 Ⅲ. 울산경제의고용계수 9 Ⅳ. 고용없는성장지속과대응방안 16 고용없는성장과울산의대응방안 요약문. 2005 5,..,..,..,
ICT À¶ÇÕÃÖÁ¾
 Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
<BBEAC0E7BAB8C7E8C1A6B5B52E687770>
 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
신성장동력업종및품목분류 ( 안 )
") 신성장동력업종및품목분류 ( 안 ) 2009. 12. 일러두기 - 2 - 목 차 < 녹색기술산업 > 23 42-3 - 목 차 45 52 < 첨단융합산업 > 66 73 80-4 - 목 차 85 96 115 < 고부가서비스산업 > 120 124 127 129 135-5 - 녹색기술산업 - 6 - 1. 신재생에너지 1-1) 태양전지 1-2) 연료전지 1-3) 해양바이오
신성장동력업종및품목분류 ( 안 ) 2009. 12. 일러두기 - 2 - 목 차 < 녹색기술산업 > 23 42-3 - 목 차 45 52 < 첨단융합산업 > 66 73 80-4 - 목 차 85 96 115 < 고부가서비스산업 > 120 124 127 129 135-5 - 녹색기술산업 - 6 - 1. 신재생에너지 1-1) 태양전지 1-2) 연료전지 1-3) 해양바이오
목차 Ⅰ. 기본현황 Ⅱ 년도성과평가및시사점 Ⅲ 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬
 증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
 2011-67 차례 - iii - 표차례 - vii - 그림차례 - xi - 요약 - i - - ii - - iii - 제 1 장서론 대구 경북지역인력수급불일치현상진단과해소방안에대한연구 1) ( ) 574 208 366 263 103 75.6 77.9 74.3 73.0 77.7 19.3 19.2 19.4 20.5 16.5 3.0 1.0 4.1
2011-67 차례 - iii - 표차례 - vii - 그림차례 - xi - 요약 - i - - ii - - iii - 제 1 장서론 대구 경북지역인력수급불일치현상진단과해소방안에대한연구 1) ( ) 574 208 366 263 103 75.6 77.9 74.3 73.0 77.7 19.3 19.2 19.4 20.5 16.5 3.0 1.0 4.1
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (
 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (") 제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 국제개발협력평가소위원회
 '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 국제개발협력평가소위원회") ( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 2016. 2. 16. 국제개발협력평가소위원회 제 20 차 국제개발협력 평가소위원회 회의자료 2 0 1 6 ᆞ 2 ᆞ 16 국제개발협력 평가소위원회
( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 2016. 2. 16. 국제개발협력평가소위원회 제 20 차 국제개발협력 평가소위원회 회의자료 2 0 1 6 ᆞ 2 ᆞ 16 국제개발협력 평가소위원회
 클라우드컴퓨팅 주요법령해설서 2017. 11. 목차 3... 5 I... 15 II... 39 1. 공공분야... 41 2. 금융분야... 71 3. 의료분야... 81 4. 교육분야... 95 5. 신산업등기타분야... 101 III... 109 요약문 5, 15 3, 1 16~ 18 15 11 16 4, 16 7,,, 5 16 5, 16 7~10,,,
클라우드컴퓨팅 주요법령해설서 2017. 11. 목차 3... 5 I... 15 II... 39 1. 공공분야... 41 2. 금융분야... 71 3. 의료분야... 81 4. 교육분야... 95 5. 신산업등기타분야... 101 III... 109 요약문 5, 15 3, 1 16~ 18 15 11 16 4, 16 7,,, 5 16 5, 16 7~10,,,
자유학기제-뉴스레터(6호).indd
.indd") freesem.kedi.re.kr CONTENTS 01 연속기획① : 협업기관에 가다! 예술 체육활동을 동시에 할 수 있는 국민체육진흥공단 에 가다! 02 협업기관을 찾아서 한국문화예술교육진흥원 한국폴리텍대학 03 자유학기제 자율과정 자료집 소개 04 알림 교육부 자유학기제지원센터, 협업기관 소식 꿈과 끼를 키우는 행복교육 자유학기제 Newsletter 알림
freesem.kedi.re.kr CONTENTS 01 연속기획① : 협업기관에 가다! 예술 체육활동을 동시에 할 수 있는 국민체육진흥공단 에 가다! 02 협업기관을 찾아서 한국문화예술교육진흥원 한국폴리텍대학 03 자유학기제 자율과정 자료집 소개 04 알림 교육부 자유학기제지원센터, 협업기관 소식 꿈과 끼를 키우는 행복교육 자유학기제 Newsletter 알림
레이아웃 1
 1 2015 December no.28 융합 Weekly 발행일 _ 2015.12.28 발행처 _ 융합연구정책센터 TIP 지능형로봇 박현섭 한국산업기술평가관리원 선정사유 제조분야에적용되기시작한로봇은전문및개인서비스분야로확장되고있으며, 제조경쟁력, 국방력, 고령화사회문제대안등한나라의국가경쟁력을좌우하는핵심기술및산업분야로대두 - 동남아인건비상승에따른제조업본국회귀 (Reshoring)
1 2015 December no.28 융합 Weekly 발행일 _ 2015.12.28 발행처 _ 융합연구정책센터 TIP 지능형로봇 박현섭 한국산업기술평가관리원 선정사유 제조분야에적용되기시작한로봇은전문및개인서비스분야로확장되고있으며, 제조경쟁력, 국방력, 고령화사회문제대안등한나라의국가경쟁력을좌우하는핵심기술및산업분야로대두 - 동남아인건비상승에따른제조업본국회귀 (Reshoring)
2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예
 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예") 2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예 Homework #2 [2] 답의예 ( 학생 1): 소폭수정 다양한외부환경을효과적으로검지할수있는센서기술은검지변환, 신호처리및지능화기술등융합 적특성을갖고있음. 현재대부분실용화중심의연구가주류를이루고있으며,
2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예 Homework #2 [2] 답의예 ( 학생 1): 소폭수정 다양한외부환경을효과적으로검지할수있는센서기술은검지변환, 신호처리및지능화기술등융합 적특성을갖고있음. 현재대부분실용화중심의연구가주류를이루고있으며,
에너지절약_수정
 Contents 산업훈장 포장 국무총리표창 삼성토탈주식회사 09 SK하이닉스(주) 93 (주)이건창호 15 한국전자통신연구원 100 현대중공업(주) 20 KT 106 두산중공업 주식회사 24 (사)전국주부교실 대구지사부 111 한국전력공사 30 (주)부-스타 36 [단체] (주)터보맥스 115 [단체] 강원도청 119 [단체] 현대오일뱅크(주) 124 [단체]
Contents 산업훈장 포장 국무총리표창 삼성토탈주식회사 09 SK하이닉스(주) 93 (주)이건창호 15 한국전자통신연구원 100 현대중공업(주) 20 KT 106 두산중공업 주식회사 24 (사)전국주부교실 대구지사부 111 한국전력공사 30 (주)부-스타 36 [단체] (주)터보맥스 115 [단체] 강원도청 119 [단체] 현대오일뱅크(주) 124 [단체]
16-27( 통권 700 호 ) 아시아분업구조의변화와시사점 - 아세안, 생산기지로서의역할확대
 아시아분업구조의변화와시사점 - 아세안, 생산기지로서의역할확대") 16-27( 통권 700 호 ) 2016.07.08 - 아세안, 생산기지로서의역할확대 본보고서에있는내용을인용또는전재하시기위해서는본연구원의허락을얻어야하며, 보고서내용에대한문의는아래와같이하여주시기바랍니다. 총괄 ( 경제연구실장 ) : 주원이사대우 (2072-6235, juwon@hri.co.kr) 경제연구실 / 동향분석팀 : : 조규림선임연구원 (2072-6240,
16-27( 통권 700 호 ) 2016.07.08 - 아세안, 생산기지로서의역할확대 본보고서에있는내용을인용또는전재하시기위해서는본연구원의허락을얻어야하며, 보고서내용에대한문의는아래와같이하여주시기바랍니다. 총괄 ( 경제연구실장 ) : 주원이사대우 (2072-6235, juwon@hri.co.kr) 경제연구실 / 동향분석팀 : : 조규림선임연구원 (2072-6240,
<C3E6B3B2B1B3C0B0313832C8A32DC5BEC0E7BFEB28C0DBB0D4292D332E706466>
 11-8140242-000001-08 2013-927 2013 182 2013 182 Contents 02 16 08 10 12 18 53 25 32 63 Summer 2 0 1 3 68 40 51 57 65 72 81 90 97 103 109 94 116 123 130 140 144 148 118 154 158 163 1 2 3 4 5 8 SUMMER
11-8140242-000001-08 2013-927 2013 182 2013 182 Contents 02 16 08 10 12 18 53 25 32 63 Summer 2 0 1 3 68 40 51 57 65 72 81 90 97 103 109 94 116 123 130 140 144 148 118 154 158 163 1 2 3 4 5 8 SUMMER
 국가표본수기간 평균최초수익률 국가표본수기간 ( 단위 : 개, 년, %) 평균최초수익률 아르헨티나 20 1991-1994 4.4 요르단 53 1999-2008 149.0 오스트레일리아 1,562 1976-2011 21.8 한국 1,593 1980-2010 61.6 오스트리아 102 1971-2010 6.3 말레이시아 350 1980-2006 69.6 벨기에 114
국가표본수기간 평균최초수익률 국가표본수기간 ( 단위 : 개, 년, %) 평균최초수익률 아르헨티나 20 1991-1994 4.4 요르단 53 1999-2008 149.0 오스트레일리아 1,562 1976-2011 21.8 한국 1,593 1980-2010 61.6 오스트리아 102 1971-2010 6.3 말레이시아 350 1980-2006 69.6 벨기에 114
_산업연구원-전체.indd
 산업포커스 지능형로봇산업의국내외동향과육성정책및시사점 요 약 지능형로봇산업은고령화사회, 제조경쟁력강화, 국방력증강등사회및국가차원의문제에대한해결책을제시할수있는산업으로주목을받고있다. 이제지능형로봇산업은인건비상승문제를겪고있는선진국과신흥국모두에게대안으로부상하고있다. 국내지능형로봇관련정책추진과정에서볼때, 올해는정부가로봇산업에대한지원정책을본격화한지약 12년이되는시점이다.
산업포커스 지능형로봇산업의국내외동향과육성정책및시사점 요 약 지능형로봇산업은고령화사회, 제조경쟁력강화, 국방력증강등사회및국가차원의문제에대한해결책을제시할수있는산업으로주목을받고있다. 이제지능형로봇산업은인건비상승문제를겪고있는선진국과신흥국모두에게대안으로부상하고있다. 국내지능형로봇관련정책추진과정에서볼때, 올해는정부가로봇산업에대한지원정책을본격화한지약 12년이되는시점이다.
수요기반강화 공급역량강화 전망및기대 - 4 -
 주형환산업부장관주요발언 보도자료 2016 년 10 월 11 일 ( 화 ) 석간부터보도하여주시기바랍니다. ( 인터넷, 방송, 통신은 10.11( 화 ) 오전 6 시이후보도가능 ) http://www.motie.go.kr 배포일시 2016. 10. 10. ( 월 ) 담당부서기계로봇과 담당과장정창현과장 (044-203-4310) 담당자이헌두사무관 (044-203-4315)
주형환산업부장관주요발언 보도자료 2016 년 10 월 11 일 ( 화 ) 석간부터보도하여주시기바랍니다. ( 인터넷, 방송, 통신은 10.11( 화 ) 오전 6 시이후보도가능 ) http://www.motie.go.kr 배포일시 2016. 10. 10. ( 월 ) 담당부서기계로봇과 담당과장정창현과장 (044-203-4310) 담당자이헌두사무관 (044-203-4315)
제 2 차 (2013~2015) 어린이식생활안전관리종합계획
 어린이식생활안전관리종합계획") 제 2 차 (2013~2015) 어린이식생활안전관리종합계획 2012. 9 목 차 추진배경 1 주요성과와반성 3 정책과여건 11 추진체계 16 세부추진과제 21 1. 어린이기호식품안전판매환경조성 23 1-1. 어린이식품안전보호구역지정및관리강화 26 1-2. 어린이기호식품판매환경개선 30 2. 어린이식생활안심확보를위한안전공급체계구축 39 2-1. 어린이단체급식의안전관리및품질개선
제 2 차 (2013~2015) 어린이식생활안전관리종합계획 2012. 9 목 차 추진배경 1 주요성과와반성 3 정책과여건 11 추진체계 16 세부추진과제 21 1. 어린이기호식품안전판매환경조성 23 1-1. 어린이식품안전보호구역지정및관리강화 26 1-2. 어린이기호식품판매환경개선 30 2. 어린이식생활안심확보를위한안전공급체계구축 39 2-1. 어린이단체급식의안전관리및품질개선
MRIO (25..,..).hwp
.hwp") 공공투자사업의지역경제파급효과추정을위한 다지역산업연관모형 MRIO 구축및분석 한국개발연구원 제 Ⅰ 장문제의제기 1 제Ⅱ장다지역산업연관모형 (MRIO) 분석의추이및문제점 7 제Ⅲ장 MRIO 모형구축을위한방법론검토 17 제Ⅳ장 KDI MRIO 모형의구조및특성 37 제Ⅴ장 KDI MRIO 모형의세부구축방법 60 제Ⅵ장 KDI MRIO 모형의추정및결과 120 제Ⅶ장
공공투자사업의지역경제파급효과추정을위한 다지역산업연관모형 MRIO 구축및분석 한국개발연구원 제 Ⅰ 장문제의제기 1 제Ⅱ장다지역산업연관모형 (MRIO) 분석의추이및문제점 7 제Ⅲ장 MRIO 모형구축을위한방법론검토 17 제Ⅳ장 KDI MRIO 모형의구조및특성 37 제Ⅴ장 KDI MRIO 모형의세부구축방법 60 제Ⅵ장 KDI MRIO 모형의추정및결과 120 제Ⅶ장
목 차. 산업의메가트렌드 1 우리의대응실태 8 우리산업의발전방향 기본방향 주요정책과제 산업별추진과제 28
 차산업혁명시대 신산업창출을위한정책과제 2016. 12. 21 신산업민 관협의회 목 차. 산업의메가트렌드 1 우리의대응실태 8 우리산업의발전방향 14 1. 기본방향 14 2. 주요정책과제 16 3. 산업별추진과제 28 . 산업의메가트렌드 가산업대변혁 (Big Bang) 의시대도래 - 1 - 나 4 대메가트렌드 (3S 1P) Œ Ž (1) 스마트화 : 초연결과지능화확산
차산업혁명시대 신산업창출을위한정책과제 2016. 12. 21 신산업민 관협의회 목 차. 산업의메가트렌드 1 우리의대응실태 8 우리산업의발전방향 14 1. 기본방향 14 2. 주요정책과제 16 3. 산업별추진과제 28 . 산업의메가트렌드 가산업대변혁 (Big Bang) 의시대도래 - 1 - 나 4 대메가트렌드 (3S 1P) Œ Ž (1) 스마트화 : 초연결과지능화확산
- 2 -
 - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
- 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
목 차 주요내용요약 1 Ⅰ. 서론 3 Ⅱ. 스마트그리드산업동향 6 1. 특징 2. 시장동향및전망 Ⅲ. 주요국별스마트그리드산업정책 17 Ⅳ. 미국의스마트그리드산업동향 스마트그리드산업구조 2. 스마트그리드가치사슬 3. 스마트그리드보급현황 Ⅴ. 미국의스마트그리드정
 2012-02 2012. 1. 13 미국스마트그리드산업의 Value Chain 및정책동향 주요내용요약 서론 스마트그리드산업동향 주요국별스마트그리드산업정책 미국의스마트그리드산업동향 미국의스마트그리드정책동향 21세기스마트그리드산업전략 결론 작성김정욱책임연구원, 미국거점 kjwcow@kiat.or,kr +1-404-477-3288 감수조영희팀장, 국제협력기획팀 yhcho@kiat.or.kr
2012-02 2012. 1. 13 미국스마트그리드산업의 Value Chain 및정책동향 주요내용요약 서론 스마트그리드산업동향 주요국별스마트그리드산업정책 미국의스마트그리드산업동향 미국의스마트그리드정책동향 21세기스마트그리드산업전략 결론 작성김정욱책임연구원, 미국거점 kjwcow@kiat.or,kr +1-404-477-3288 감수조영희팀장, 국제협력기획팀 yhcho@kiat.or.kr
Art & Technology #5: 3D 프린팅 - Art World | 현대자동차
 Art & Technology #5: 3D 프린팅 새로운 기술, 새로운 가능성 미래를 바꿔놓을 기술 이 무엇인 것 같으냐고 묻는다면 어떻게 대답해야 할까요? 답은 한 마치 한 쌍(pair)과도 같은 3D 스캐닝-프린팅 산업이 빠른 속도로 진화하고 있는 이유입니 가지는 아닐 것이나 그 대표적인 기술로 3D 스캐닝 과 3D 프린팅 을 들 수 있을 것입니 다. 카메라의
Art & Technology #5: 3D 프린팅 새로운 기술, 새로운 가능성 미래를 바꿔놓을 기술 이 무엇인 것 같으냐고 묻는다면 어떻게 대답해야 할까요? 답은 한 마치 한 쌍(pair)과도 같은 3D 스캐닝-프린팅 산업이 빠른 속도로 진화하고 있는 이유입니 가지는 아닐 것이나 그 대표적인 기술로 3D 스캐닝 과 3D 프린팅 을 들 수 있을 것입니 다. 카메라의
경북지역일자리공시제내실화방안
 2011-49 경북지역일자리공시제내실화방안 차례 표차례 요약. 5.,,.,.,..,..,,. 2010 7 2011 8 244 227. 2011 6 i 2011 6 221 (www.reis.or.kr) 8 224. 23 2010 100%, 5 2011. 5 224,025 13. 33,536 8, 10,219. 21,499 1/3. 8,796 21,872,
2011-49 경북지역일자리공시제내실화방안 차례 표차례 요약. 5.,,.,.,..,..,,. 2010 7 2011 8 244 227. 2011 6 i 2011 6 221 (www.reis.or.kr) 8 224. 23 2010 100%, 5 2011. 5 224,025 13. 33,536 8, 10,219. 21,499 1/3. 8,796 21,872,
<B8D3B8AEB8BB5F20B8F1C2F72E687770>
 발간사 발간사 KDI 정책연구사례 : 지난 30 년의회고 발간사 KDI 정책연구사례 : 지난 30 년의회고 목차 / 김광석 / 김적교 / 사공일 / 송희연 / 남상우 / 문팔용 / 김윤형 / 사공일ㆍ송대희 / 김수곤 / 김영봉 / 이규억 / 민재성ㆍ박재용 KDI 정책연구사례 : 지난 30 년의회고 / 황인정 / 남상우 / 양수길 / 고일동 / 김준경ㆍ조동철
발간사 발간사 KDI 정책연구사례 : 지난 30 년의회고 발간사 KDI 정책연구사례 : 지난 30 년의회고 목차 / 김광석 / 김적교 / 사공일 / 송희연 / 남상우 / 문팔용 / 김윤형 / 사공일ㆍ송대희 / 김수곤 / 김영봉 / 이규억 / 민재성ㆍ박재용 KDI 정책연구사례 : 지난 30 년의회고 / 황인정 / 남상우 / 양수길 / 고일동 / 김준경ㆍ조동철
1
 2014 년도기술수준평가결과 ( 안 ) - 120 개국가전략기술 - ( 1 ) 2014 가. 10대기술분야 ( 2 ) 나. 120개국가전략기술분야 ( 3 ) 다. 미래성장동력산업 (13 개 ) 분야 4. ( 4 ) 2014 년도기술수준평가결과 ( 안 ) -120 개국가전략기술 - 목차 1. 평가개요 1 2. 평가단계별추진절차 2 3. 평가결과 3 4. 국가전략기술로본미래성장동력산업별기술수준
2014 년도기술수준평가결과 ( 안 ) - 120 개국가전략기술 - ( 1 ) 2014 가. 10대기술분야 ( 2 ) 나. 120개국가전략기술분야 ( 3 ) 다. 미래성장동력산업 (13 개 ) 분야 4. ( 4 ) 2014 년도기술수준평가결과 ( 안 ) -120 개국가전략기술 - 목차 1. 평가개요 1 2. 평가단계별추진절차 2 3. 평가결과 3 4. 국가전략기술로본미래성장동력산업별기술수준
........1.hwp
 2000년 1,588(19.7% ) 99년 1,628(20.2% ) 2001년 77(1.0% ) 98년 980(12.2% ) 90년 이 전 1,131(16.3% ) 91~95년 1,343(16.7% ) 96~97년 1,130(14.0% ) 1200.00 1000.00 800.00 600.00 400.00 200.00 0.00 98.7
2000년 1,588(19.7% ) 99년 1,628(20.2% ) 2001년 77(1.0% ) 98년 980(12.2% ) 90년 이 전 1,131(16.3% ) 91~95년 1,343(16.7% ) 96~97년 1,130(14.0% ) 1200.00 1000.00 800.00 600.00 400.00 200.00 0.00 98.7
¿©¼ººÎÃÖÁ¾¼öÁ¤(0108).hwp
.hwp") 어렵다. 1997년우리나라 50대그룹 (586개기업 ) 에근무하는 110,096 명의과장급이상관리 - 1 - - 2 - - 3 - 행정및경영관리자 (02) 중에서경영관리자에해당되는부문이라고할수있다. 경영관리자는더세부적으로는기업고위임원 (021), 생산부서관리자 (022), 기타부서관리자 (023) 등으로세분류할수있다 (< 참고-1> 참조 ). 임원-부장-과장
어렵다. 1997년우리나라 50대그룹 (586개기업 ) 에근무하는 110,096 명의과장급이상관리 - 1 - - 2 - - 3 - 행정및경영관리자 (02) 중에서경영관리자에해당되는부문이라고할수있다. 경영관리자는더세부적으로는기업고위임원 (021), 생산부서관리자 (022), 기타부서관리자 (023) 등으로세분류할수있다 (< 참고-1> 참조 ). 임원-부장-과장
 > 국가기술자격검정시행계획 2015. 11. 2016 - 4 - 1. 근거 2. 기본방침 - 1 - 3. 세부시행계획 - 2 - - 3 - - 4 - 4. 검정별시행계획 - 5 - - 6 - - 7 - 기술사 종목별시행회 108 110 108 110 108 110 108 109 110 108 109 110 108 109 110 108
> 국가기술자격검정시행계획 2015. 11. 2016 - 4 - 1. 근거 2. 기본방침 - 1 - 3. 세부시행계획 - 2 - - 3 - - 4 - 4. 검정별시행계획 - 5 - - 6 - - 7 - 기술사 종목별시행회 108 110 108 110 108 110 108 109 110 108 109 110 108 109 110 108
hwp
 지식경제와핵심역량 지식경제와핵심역량 ⅲ ⅳ 지식경제와핵심역량 지식경제와핵심역량 ⅴ ⅵ 지식경제와핵심역량 지식경제와핵심역량 ⅶ ⅷ 지식경제와핵심역량 지식경제와핵심역량 ⅸ ⅹ 지식경제와핵심역량 지식경제와핵심역량 ⅹⅰ ⅹⅱ 지식경제와핵심역량 지식경제와핵심역량 ⅹⅲ ⅹⅳ 지식경제와핵심역량 지식경제와핵심역량 ⅹⅴ ⅹⅵ 지식경제와핵심역량 지식경제와핵심역량
지식경제와핵심역량 지식경제와핵심역량 ⅲ ⅳ 지식경제와핵심역량 지식경제와핵심역량 ⅴ ⅵ 지식경제와핵심역량 지식경제와핵심역량 ⅶ ⅷ 지식경제와핵심역량 지식경제와핵심역량 ⅸ ⅹ 지식경제와핵심역량 지식경제와핵심역량 ⅹⅰ ⅹⅱ 지식경제와핵심역량 지식경제와핵심역량 ⅹⅲ ⅹⅳ 지식경제와핵심역량 지식경제와핵심역량 ⅹⅴ ⅹⅵ 지식경제와핵심역량 지식경제와핵심역량
C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 개관 완성차브랜드현황 협력업체 ( 부
 Global Market Report 17-039 Global Market Report 태국자동차산업글로벌밸류체인 (GVC) 진출방안 방콕무역관 C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 13 3. 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 16 1. 개관
Global Market Report 17-039 Global Market Report 태국자동차산업글로벌밸류체인 (GVC) 진출방안 방콕무역관 C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 13 3. 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 16 1. 개관
지능형로봇
 지능형로봇 전략분야 지능형로봇 1. 개요 1 2. 정책분석 4 3. 생태계분석 15 4. 기술분석 26 5. 중소기업시장대응전략도출 32 6. 전략품목 33 전략품목 산업용근력증강웨어러블로봇 1. 개요 38 2. 외부환경분석 41 3. 기술분석 46 4. 연구개발네트워크 57 5. 기술개발로드맵 62 가정용로봇및콘텐츠 1. 개요 70 2. 외부환경분석 73
지능형로봇 전략분야 지능형로봇 1. 개요 1 2. 정책분석 4 3. 생태계분석 15 4. 기술분석 26 5. 중소기업시장대응전략도출 32 6. 전략품목 33 전략품목 산업용근력증강웨어러블로봇 1. 개요 38 2. 외부환경분석 41 3. 기술분석 46 4. 연구개발네트워크 57 5. 기술개발로드맵 62 가정용로봇및콘텐츠 1. 개요 70 2. 외부환경분석 73
01정책백서목차(1~18)
") 발간사 2008년 2월, 발전과 통합이라는 시대적 요구에 부응하여 출범한 새 정부는 문화정책의 목표를 품격 있는 문화국가 로 설정하고, 그간의 정책을 지속적으로 보완하는 한편 권한과 책임의 원칙에 따라 지원되고, 효율의 원리에 따라 운영될 수 있도록 과감한 변화를 도입하는 등 새로운 문화정책을 추진하였습니다. 란 국민 모두가 생활 속에서 문화적 삶과 풍요로움을
발간사 2008년 2월, 발전과 통합이라는 시대적 요구에 부응하여 출범한 새 정부는 문화정책의 목표를 품격 있는 문화국가 로 설정하고, 그간의 정책을 지속적으로 보완하는 한편 권한과 책임의 원칙에 따라 지원되고, 효율의 원리에 따라 운영될 수 있도록 과감한 변화를 도입하는 등 새로운 문화정책을 추진하였습니다. 란 국민 모두가 생활 속에서 문화적 삶과 풍요로움을
CONTENTS 목 차 요약 / 1 Ⅰ. 이란시장동향 / 2 1. 이란시장개요 2. 주요산업현황 3. 이란의교역및투자동향 Ⅱ. 한 - 이란경제교류현황 / 10 Ⅲ. 경쟁국의이란진출현황 / 12 Ⅳ. 對이란 10 대수출유망품목 / 15 Ⅴ. 對이란진출전략 /
 CONTENTS 목 차 요약 / 1 Ⅰ. 이란시장동향 / 2 1. 이란시장개요 2. 주요산업현황 3. 이란의교역및투자동향 Ⅱ. 한 - 이란경제교류현황 / 10 Ⅲ. 경쟁국의이란진출현황 / 12 Ⅳ. 對이란 10 대수출유망품목 / 15 Ⅴ. 對이란진출전략 / 56 1. 대이란진출전략및유의사항 2. KOTRA 의이란진출지원방안 경제제재완화대비, 對이란 10 대수출유망품목및진출방안
CONTENTS 목 차 요약 / 1 Ⅰ. 이란시장동향 / 2 1. 이란시장개요 2. 주요산업현황 3. 이란의교역및투자동향 Ⅱ. 한 - 이란경제교류현황 / 10 Ⅲ. 경쟁국의이란진출현황 / 12 Ⅳ. 對이란 10 대수출유망품목 / 15 Ⅴ. 對이란진출전략 / 56 1. 대이란진출전략및유의사항 2. KOTRA 의이란진출지원방안 경제제재완화대비, 對이란 10 대수출유망품목및진출방안
5월전체 :7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26
 5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
오토 2, 3월호 내지최종
 Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
목차 Ⅰ Ⅱ (2013)
") 뿌리산업실태및인력수급현황분석 목차 Ⅰ. 1 1. 1 2. 1 Ⅱ. 3 1. 3. 3. 4. 5. 5. 6. 7. 8 2. 11. 11. 12 3. 17. 17. 19. 21. 23 4. (2013) 25. 25. 27 5. 1 29 Ⅲ. 31 1. (2013) 31. 31. 33 2. (2013) 35. 35. (2014) 37 3. (2013) 39. 39.
뿌리산업실태및인력수급현황분석 목차 Ⅰ. 1 1. 1 2. 1 Ⅱ. 3 1. 3. 3. 4. 5. 5. 6. 7. 8 2. 11. 11. 12 3. 17. 17. 19. 21. 23 4. (2013) 25. 25. 27 5. 1 29 Ⅲ. 31 1. (2013) 31. 31. 33 2. (2013) 35. 35. (2014) 37 3. (2013) 39. 39.
I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 )
 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 )") KS 인증공장심사항목해설서 2013. 3 한국표준협회 I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 ) 4-2. (4 ) 5. (7 ) 5-1.
KS 인증공장심사항목해설서 2013. 3 한국표준협회 I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 ) 4-2. (4 ) 5. (7 ) 5-1.
12나라살림-예산표지 수정본
 2012 S U M M A R Y O F F Y 2 0 1 2 B U D G E T 01 02 03 SUMMARY OF FY 2012 BUDGET 01 9 10 11 12 13 14 15 16 17 18 19 23 24 25 26 27 28 29 02 1 35 2 36 37 38 39 40 41 42 3 43 44 45 46 4 47 48
2012 S U M M A R Y O F F Y 2 0 1 2 B U D G E T 01 02 03 SUMMARY OF FY 2012 BUDGET 01 9 10 11 12 13 14 15 16 17 18 19 23 24 25 26 27 28 29 02 1 35 2 36 37 38 39 40 41 42 3 43 44 45 46 4 47 48
- 2 -
 2014 년융 복합기술개발사업 ( 융 복합과제 ) 제안요청서 목차 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - Ω - 18 - - 19 - - 20 - 기계소재 -001-21 - 기계소재 -002-22 - 기계소재
2014 년융 복합기술개발사업 ( 융 복합과제 ) 제안요청서 목차 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - Ω - 18 - - 19 - - 20 - 기계소재 -001-21 - 기계소재 -002-22 - 기계소재
4 차산업혁명과지식서비스 l 저자 l 한형상 / 한국산업기술평가관리원지식서비스 PD 김 현 / 한국전자통신연구원 IoT 연구본부장 SUMMARY 4차산업혁명의성격은초연결 초융합 초지능의세키워드로요약된다. 초연결은사람, 사물등객체간의상호연결성이확장됨을말하며이는곧실시간데이
 4 차산업혁명과지식서비스 l 저자 l 한형상 / 한국산업기술평가관리원지식서비스 PD 김 현 / 한국전자통신연구원 IoT 연구본부장 SUMMARY 4차산업혁명의성격은초연결 초융합 초지능의세키워드로요약된다. 초연결은사람, 사물등객체간의상호연결성이확장됨을말하며이는곧실시간데이터공유가질적 양적으로크게확대됨을의미한다. 초융합은초연결환경의조성으로이전에는생각할수없었던異種기술
4 차산업혁명과지식서비스 l 저자 l 한형상 / 한국산업기술평가관리원지식서비스 PD 김 현 / 한국전자통신연구원 IoT 연구본부장 SUMMARY 4차산업혁명의성격은초연결 초융합 초지능의세키워드로요약된다. 초연결은사람, 사물등객체간의상호연결성이확장됨을말하며이는곧실시간데이터공유가질적 양적으로크게확대됨을의미한다. 초융합은초연결환경의조성으로이전에는생각할수없었던異種기술
 1. 2. 3. 추진배경및경과 추진배경 추진경과 2012년도추진실적및성과 정부투자 인력양성및교육프로그램운영 단계별성과 2013 년도추진계획 기본계획 4 대전략별 13 년도투자계획 구분 미래부 농식품부 산업부 복지부 환경부 해수부 4 대전략별투입계획합계 ( 단위 : 백만원 ) 전략 1 전략 2 전략 3 전략 4 10,704.85 6,310.6 6,029.4
1. 2. 3. 추진배경및경과 추진배경 추진경과 2012년도추진실적및성과 정부투자 인력양성및교육프로그램운영 단계별성과 2013 년도추진계획 기본계획 4 대전략별 13 년도투자계획 구분 미래부 농식품부 산업부 복지부 환경부 해수부 4 대전략별투입계획합계 ( 단위 : 백만원 ) 전략 1 전략 2 전략 3 전략 4 10,704.85 6,310.6 6,029.4
<C3D6BDC C0CCBDB4202D20BAB9BBE7BABB2E687770>
 * IV. 가정에종사하는컨슈머로봇시장전망 AI, IoT 등의기술발전과집안에서의 ICT 기기보급등에의해 B2C 컨슈머용로봇분야가다시부각되고있음 코트라의 2018년글로벌로봇산업시장동향및진출방안 보고서에의하면로봇의글로벌성장률이제조로봇은 15%, 컨슈머용로봇은 35% 로컨슈머용로봇성장률이훨씬높은것으로예측 컨슈머로봇성장트랜드에는엔터테인먼트용로봇들이중심에있는데, 휴머노이드로봇보다는제작이쉽고원가가싸며,
* IV. 가정에종사하는컨슈머로봇시장전망 AI, IoT 등의기술발전과집안에서의 ICT 기기보급등에의해 B2C 컨슈머용로봇분야가다시부각되고있음 코트라의 2018년글로벌로봇산업시장동향및진출방안 보고서에의하면로봇의글로벌성장률이제조로봇은 15%, 컨슈머용로봇은 35% 로컨슈머용로봇성장률이훨씬높은것으로예측 컨슈머로봇성장트랜드에는엔터테인먼트용로봇들이중심에있는데, 휴머노이드로봇보다는제작이쉽고원가가싸며,
1
 제주국제자유도시개발센터 389 2.7 제주국제자유도시개 제주국제자유도시개발센터 391 1. 평가결과요약 평가부문종합경영부문 (35) 주요사업부문 (35) 경영관리부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B o 3.750 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 D + 1.500
제주국제자유도시개발센터 389 2.7 제주국제자유도시개 제주국제자유도시개발센터 391 1. 평가결과요약 평가부문종합경영부문 (35) 주요사업부문 (35) 경영관리부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B o 3.750 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 D + 1.500
92302 대한무역투자진흥공사 대한무역투자진흥공사
 92302 대한무역투자진흥공사 357 92302 대한무역투자진흥공사 92302 대한무역투자진흥공사 359 총괄요약표 리더십 전략 경영 시스템 경영 성과 평가범주지표명평가방법가중치등급 리더십 전략 주요 사업 활동 경영 효율화 주요 사업 성과 고객 성과 경영 효율 성과 (1) 경영진리더십 6등급평가 3 A (2) 지배구조및윤리경영 6등급평가 4 B (3) CS
92302 대한무역투자진흥공사 357 92302 대한무역투자진흥공사 92302 대한무역투자진흥공사 359 총괄요약표 리더십 전략 경영 시스템 경영 성과 평가범주지표명평가방법가중치등급 리더십 전략 주요 사업 활동 경영 효율화 주요 사업 성과 고객 성과 경영 효율 성과 (1) 경영진리더십 6등급평가 3 A (2) 지배구조및윤리경영 6등급평가 4 B (3) CS
활력있는경제 튼튼한재정 안정된미래 년세법개정안 기획재정부
 활력있는경제 튼튼한재정 안정된미래 2 012 년세법개정안 기획재정부 목차 Ⅰ. 일자리창출및성장동력확충 1 고용창출지원강화 < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > ㅇ < 개정이유 > < 적용시기 > ㅇ < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 >
활력있는경제 튼튼한재정 안정된미래 2 012 년세법개정안 기획재정부 목차 Ⅰ. 일자리창출및성장동력확충 1 고용창출지원강화 < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > ㅇ < 개정이유 > < 적용시기 > ㅇ < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 >
 ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
2 인구절벽에대비한해외정책및사례연구
 제 1 장서론 1 1. 연구의배경및목적 2 인구절벽에대비한해외정책및사례연구 제 1 장서론 3 2. 연구절차및방법 4 인구절벽에대비한해외정책및사례연구 1. 인구절벽현상의의의 제 2 장인구절벽현상의개념적정의, 원인, 문제점 5 2. 인구절벽현상의원인 (1) 합계출산율의감소 6 인구절벽에대비한해외정책및사례연구 제 2 장인구절벽현상의개념적정의, 원인, 문제점 7 (2)
제 1 장서론 1 1. 연구의배경및목적 2 인구절벽에대비한해외정책및사례연구 제 1 장서론 3 2. 연구절차및방법 4 인구절벽에대비한해외정책및사례연구 1. 인구절벽현상의의의 제 2 장인구절벽현상의개념적정의, 원인, 문제점 5 2. 인구절벽현상의원인 (1) 합계출산율의감소 6 인구절벽에대비한해외정책및사례연구 제 2 장인구절벽현상의개념적정의, 원인, 문제점 7 (2)
2. 인공지능관련주요기술분야와응용영역 2-1. 인공지능기술분류 2-2. 인공지능기술의특성 2-3. 인공지능응용영역및어플리케이션 2-4. 국내기술수준현황 3. 인공지능분야 Key Player 들의주요비즈니스동향 3-1. 주요동향 3-2. 인공지능관련인수합병 (M&A) 현
 현") Ⅰ. 인공지능 (AI) 기술개관및도입효과 1. 인공지능의개념이해 1-1. 최근인공지능기술의대두 1-2. 인공지능개념정의 1-3. 인공지능의유형분류 1-4. 머신러닝 과 딥러닝 ', 핵심개념의구분 2. 인공지능의학문적논의배경 3. 인공지능기술의역사적발전과정 3-1. 인공지능의탄생기 : 1950 년대 3-2. 인공지능의활성화기 : 1960 년대 3-3. 인공지능의과도ㆍ침체기
Ⅰ. 인공지능 (AI) 기술개관및도입효과 1. 인공지능의개념이해 1-1. 최근인공지능기술의대두 1-2. 인공지능개념정의 1-3. 인공지능의유형분류 1-4. 머신러닝 과 딥러닝 ', 핵심개념의구분 2. 인공지능의학문적논의배경 3. 인공지능기술의역사적발전과정 3-1. 인공지능의탄생기 : 1950 년대 3-2. 인공지능의활성화기 : 1960 년대 3-3. 인공지능의과도ㆍ침체기
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론
 이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
[2016년조사대상 (19곳)] 대림산업, 대한항공, 동부화재해상, ( 주 ) 두산, 롯데쇼핑, 부영주택, 삼성전자, CJ제일제당, 아시아나항공, LS니꼬동제련, LG이노텍, OCI, 이마트, GS칼텍스, KT, 포스코, 한화생명보험, 현대자동차, SK이노베이션 [ 표
![[2016년조사대상 (19곳)] 대림산업, 대한항공, 동부화재해상, ( 주 ) 두산, 롯데쇼핑, 부영주택, 삼성전자, CJ제일제당, 아시아나항공, LS니꼬동제련, LG이노텍, OCI, 이마트, GS칼텍스, KT, 포스코, 한화생명보험, 현대자동차, SK이노베이션 [ 표](/thumbs/91/104667414.jpg "[2016년조사대상 (19곳)] 대림산업, 대한항공, 동부화재해상, ( 주 ) 두산, 롯데쇼핑, 부영주택, 삼성전자, CJ제일제당, 아시아나항공, LS니꼬동제련, LG이노텍, OCI, 이마트, GS칼텍스, KT, 포스코, 한화생명보험, 현대자동차, SK이노베이션 [ 표") - 1 - [2016년조사대상 (19곳)] 대림산업, 대한항공, 동부화재해상, ( 주 ) 두산, 롯데쇼핑, 부영주택, 삼성전자, CJ제일제당, 아시아나항공, LS니꼬동제련, LG이노텍, OCI, 이마트, GS칼텍스, KT, 포스코, 한화생명보험, 현대자동차, SK이노베이션 [ 표 1] 입사지원서의학력과출신학교정보기재란유무 - 2 - 회사명 학력기입 고등학교대학석사박사출신학교명
- 1 - [2016년조사대상 (19곳)] 대림산업, 대한항공, 동부화재해상, ( 주 ) 두산, 롯데쇼핑, 부영주택, 삼성전자, CJ제일제당, 아시아나항공, LS니꼬동제련, LG이노텍, OCI, 이마트, GS칼텍스, KT, 포스코, 한화생명보험, 현대자동차, SK이노베이션 [ 표 1] 입사지원서의학력과출신학교정보기재란유무 - 2 - 회사명 학력기입 고등학교대학석사박사출신학교명
신규투자사업에 대한 타당성조사(최종보고서)_v10_클린아이공시.hwp
_v10_클린아이공시.hwp") 신규투자사업에 대한 타당성 조사 (요약본) 2015. 4. 지방공기업평가원 제주관광공사가부족한쇼핑인프라를보완하고, 수익을제주관광진흥에재투자하여 관광산업활성화와관광마케팅재원확보 라는양대목적달성에기여하고공기업으로서사회적책임을다하고자시내면세점사업에투자하려는의사결정에대한타당도는전반적으로볼때 긍정 으로평가할수있음 역할및필요성 대내 외환경 정책및법률 경제성기대효과
신규투자사업에 대한 타당성 조사 (요약본) 2015. 4. 지방공기업평가원 제주관광공사가부족한쇼핑인프라를보완하고, 수익을제주관광진흥에재투자하여 관광산업활성화와관광마케팅재원확보 라는양대목적달성에기여하고공기업으로서사회적책임을다하고자시내면세점사업에투자하려는의사결정에대한타당도는전반적으로볼때 긍정 으로평가할수있음 역할및필요성 대내 외환경 정책및법률 경제성기대효과
목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종
 2 0 1 4 년 4 / 4 분기 2014. 9 목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ. 2014 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종별전망 7 5. 규모및유형별전망 8 6. 정부경기부양정책발표에따른영향
2 0 1 4 년 4 / 4 분기 2014. 9 목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ. 2014 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종별전망 7 5. 규모및유형별전망 8 6. 정부경기부양정책발표에따른영향
2016 년도국토교통기술 연구개발사업시행계획 국토교통부 국토교통과학기술진흥원
 2016 년도국토교통기술 연구개발사업시행계획 2015. 12. 국토교통부 국토교통과학기술진흥원 목차 Ⅰ. 계획수립개요 1 계획수립배경 1 계획수립대상사업 1 상위계획과연계성 2 Ⅱ. 투자현황및성과 3 투자현황 3 투자방향 5 주요성과 8 Ⅲ. 2016 년추진방향및주요내용 9 정부연구개발과국토교통 R&D 추진방향연계 9 부문별투자계획 10 R&D 시스템개선 12
2016 년도국토교통기술 연구개발사업시행계획 2015. 12. 국토교통부 국토교통과학기술진흥원 목차 Ⅰ. 계획수립개요 1 계획수립배경 1 계획수립대상사업 1 상위계획과연계성 2 Ⅱ. 투자현황및성과 3 투자현황 3 투자방향 5 주요성과 8 Ⅲ. 2016 년추진방향및주요내용 9 정부연구개발과국토교통 R&D 추진방향연계 9 부문별투자계획 10 R&D 시스템개선 12
KOTRA 자료 해외시장권역별진출전략 < 유럽 >
 KOTRA 자료 15-054 2016 해외시장권역별진출전략 < 유럽 > 유럽진출전략 목 차 Ⅰ. 16년주요이슈및전망 3 1. 유로화약세강화 3 2. EU 경기호조세본격화에따른수출유망시장확대 3 3. VW사태에따른자동차와주력상품시장환경변화 4 4. 유럽의블루오션시장, 대규모프로젝트발주본격화 4 5. 중동난민유입에따른정치 사회적불안요소가중 5 Ⅱ. 진출환경분석
KOTRA 자료 15-054 2016 해외시장권역별진출전략 < 유럽 > 유럽진출전략 목 차 Ⅰ. 16년주요이슈및전망 3 1. 유로화약세강화 3 2. EU 경기호조세본격화에따른수출유망시장확대 3 3. VW사태에따른자동차와주력상품시장환경변화 4 4. 유럽의블루오션시장, 대규모프로젝트발주본격화 4 5. 중동난민유입에따른정치 사회적불안요소가중 5 Ⅱ. 진출환경분석
_report.hwp
 해외출장복명서 ( 일본기타큐슈, 교토, 오사카 ) 2009. 9 녹색국토 도시연구본부이승욱 - 차례 - 1. 해외출장개요 1 2. 주요내용및시사점 2 1. 기타큐슈무라사키강 2 2. 교토카모강 14 3. 오사카요도강 16 3. 방문기관및안내자 1. 목적 2. 출장일정및출장지 - 1 - 1. 기타큐슈무라사키강 < 무라사키강전경 > - 2 - < 무라사키강하류에입지한산업단지전경
해외출장복명서 ( 일본기타큐슈, 교토, 오사카 ) 2009. 9 녹색국토 도시연구본부이승욱 - 차례 - 1. 해외출장개요 1 2. 주요내용및시사점 2 1. 기타큐슈무라사키강 2 2. 교토카모강 14 3. 오사카요도강 16 3. 방문기관및안내자 1. 목적 2. 출장일정및출장지 - 1 - 1. 기타큐슈무라사키강 < 무라사키강전경 > - 2 - < 무라사키강하류에입지한산업단지전경
1 제 26 장 사회간접자본의확충
 삼성경제연구소 1 제 26 장 사회간접자본의확충 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 제 27 장 대형국책과제의추진 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56
삼성경제연구소 1 제 26 장 사회간접자본의확충 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 제 27 장 대형국책과제의추진 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56
현안과과제_8.14 임시공휴일 지정의 경제적 파급 영향_150805.hwp
 15-27호 2015.08.05 8.14 임시공휴일 지정의 경제적 파급 영향 - 국민의 절반 동참시 1조 3,100억원의 내수 진작 효과 기대 Executive Summary 8.14 임시공휴일 지정의 경제적 파급 영향 개 요 정부는 지난 4일 국무회의에서 침체된 국민의 사기 진작과 내수 활성화를 목적으로 오는 8월 14일을 임시공휴일로 지정하였다. 이에 최근
15-27호 2015.08.05 8.14 임시공휴일 지정의 경제적 파급 영향 - 국민의 절반 동참시 1조 3,100억원의 내수 진작 효과 기대 Executive Summary 8.14 임시공휴일 지정의 경제적 파급 영향 개 요 정부는 지난 4일 국무회의에서 침체된 국민의 사기 진작과 내수 활성화를 목적으로 오는 8월 14일을 임시공휴일로 지정하였다. 이에 최근
C O N T E N T S 목 차 요약 / 3 Ⅰ. 브라질소비시장동향및특성 경제현황 2. 소비시장의특성 Ⅱ. 브라질소비시장히트상품분석 최근히트상품 년소비시장, 이런상품을주목하라! Ⅲ. 우리기업의 4P 진출전략
 Global Market Report 16-035 2016 브라질소비시장, 이런상품을주목하라! C O N T E N T S 목 차 요약 / 3 Ⅰ. 브라질소비시장동향및특성 4 5 1. 경제현황 2. 소비시장의특성 Ⅱ. 브라질소비시장히트상품분석 11 20 1. 최근히트상품 2. 2016 년소비시장, 이런상품을주목하라! Ⅲ. 우리기업의 4P 진출전략 27 30
Global Market Report 16-035 2016 브라질소비시장, 이런상품을주목하라! C O N T E N T S 목 차 요약 / 3 Ⅰ. 브라질소비시장동향및특성 4 5 1. 경제현황 2. 소비시장의특성 Ⅱ. 브라질소비시장히트상품분석 11 20 1. 최근히트상품 2. 2016 년소비시장, 이런상품을주목하라! Ⅲ. 우리기업의 4P 진출전략 27 30
2003report250-9.hwp
 2003 연구보고서 250-9 여성의 IT 직종교육훈련후취업현황및취업연계방안 : () : () 한국여성개발원 발간사 2003 12 연구요약 1. 2. 전체정부위탁훈련기관의취업관련서비스제공정도에서, 취업정보, 취업상담, 취업알선을 적극적이며많이제공 한다가각각 76.6%, 70.3%, 65.6% 로알선기능이약간떨어지며, 취업처개척 개발 (50.0%) 이가장낮다.
2003 연구보고서 250-9 여성의 IT 직종교육훈련후취업현황및취업연계방안 : () : () 한국여성개발원 발간사 2003 12 연구요약 1. 2. 전체정부위탁훈련기관의취업관련서비스제공정도에서, 취업정보, 취업상담, 취업알선을 적극적이며많이제공 한다가각각 76.6%, 70.3%, 65.6% 로알선기능이약간떨어지며, 취업처개척 개발 (50.0%) 이가장낮다.
Global Market Report 한 - 뉴질랜드 FTA 에따른현지반응과 중소기업수출유망품목
 Global Market Report 15-014 2015.3.20 한 - 뉴질랜드 FTA 에따른현지반응과 중소기업수출유망품목 C O N T E N T S 목차 요약 Ⅰ. 한 - 뉴질랜드 FTA 주요내용 1 1 1 3 1. 협상경과 2. 상품양허주요내용 3. 투자및인력교류주요내용 Ⅱ. 한 - 뉴질랜드 FTA 에대한현지반응조사 5 5 6 6 9 9 10 1.
Global Market Report 15-014 2015.3.20 한 - 뉴질랜드 FTA 에따른현지반응과 중소기업수출유망품목 C O N T E N T S 목차 요약 Ⅰ. 한 - 뉴질랜드 FTA 주요내용 1 1 1 3 1. 협상경과 2. 상품양허주요내용 3. 투자및인력교류주요내용 Ⅱ. 한 - 뉴질랜드 FTA 에대한현지반응조사 5 5 6 6 9 9 10 1.
차 례
 2015 년 8 월호 제주경제동향 차 례 제주지역경제동향 ʼ15.6 124.6 124.6 0.12% 0.12%, 105.7 0.52% 105.7-0.52% ʼ15.7 4p () 79 4p 100 720 46.6% ʼ15.6 5,355M/T 19,530-24.7% -4.7%, 110.2 2.1% 108.8 3.8% 183.4 45.6% 1,071,464-7.2%
2015 년 8 월호 제주경제동향 차 례 제주지역경제동향 ʼ15.6 124.6 124.6 0.12% 0.12%, 105.7 0.52% 105.7-0.52% ʼ15.7 4p () 79 4p 100 720 46.6% ʼ15.6 5,355M/T 19,530-24.7% -4.7%, 110.2 2.1% 108.8 3.8% 183.4 45.6% 1,071,464-7.2%
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 한국직업자격학회
 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
비상업목적으로본보고서에있는내용을인용또는전재할경우내용의출처를명시하면자유롭게인용할수있으며, 보고서내용에대한문의는아래와같이하여주시기바랍니다. 경제연구실 : 주원이사대우 ( ,
 18-10( 통권 785 호 ) 2018. 03. 09 관세전쟁발수출절벽대응을위한내외수균형전략 - 최근경제동향과경기판단 (2018 년 1 분기 ) 비상업목적으로본보고서에있는내용을인용또는전재할경우내용의출처를명시하면자유롭게인용할수있으며, 보고서내용에대한문의는아래와같이하여주시기바랍니다. 경제연구실 : 주원이사대우 (2072-6235, juwon@hri.co.kr)
18-10( 통권 785 호 ) 2018. 03. 09 관세전쟁발수출절벽대응을위한내외수균형전략 - 최근경제동향과경기판단 (2018 년 1 분기 ) 비상업목적으로본보고서에있는내용을인용또는전재할경우내용의출처를명시하면자유롭게인용할수있으며, 보고서내용에대한문의는아래와같이하여주시기바랍니다. 경제연구실 : 주원이사대우 (2072-6235, juwon@hri.co.kr)
슬라이드 1
 공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
요약 1 요약 제 1 장사업의개요및조사방법
 요약 1 요약 제 1 장사업의개요및조사방법 2 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서 요약 3 ( : ) 4 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서 요약 5 6 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서 제 2 장기술적타당성분석 요약 7 8 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서 요약 9 10 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서
요약 1 요약 제 1 장사업의개요및조사방법 2 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서 요약 3 ( : ) 4 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서 요약 5 6 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서 제 2 장기술적타당성분석 요약 7 8 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서 요약 9 10 미래해양개발을위한수중건설로봇개발사업예비타당성조사보고서
임베디드2014(가을)
") 2014 Autumn Vol.8 www.givet.re.kr 2014 Autumn News Letter 2014 Autumn Vol.8 News Letter CONTENTS GIVET Autumn 04 05 이천십사년 가을호 뉴스레터 FOCUS_ 2014년 기업지원사업 성과 기업지원성과 1 2013 경북디지털기기부품산업 패키지역량강화사업 사업기간 : 2013년
2014 Autumn Vol.8 www.givet.re.kr 2014 Autumn News Letter 2014 Autumn Vol.8 News Letter CONTENTS GIVET Autumn 04 05 이천십사년 가을호 뉴스레터 FOCUS_ 2014년 기업지원사업 성과 기업지원성과 1 2013 경북디지털기기부품산업 패키지역량강화사업 사업기간 : 2013년
2017년 해사안전시행계획(최종).hwp
.hwp") 2017 년해사안전시행계획 2017. 5. 요약본 목차. 해사안전시행계획의개요 1. 해양사고현황및여건 5. '16 년성과및반성 13. '17 년추진계획 17 1. 선박안전신뢰성제고및맞춤형안전관리 25 2. 자율적안전관리기반확대및해사안전관리체계고도화 65 3. 범바다안전의식의획기적전환유도 115 4. 해상종사자역량제고와고품질복지제공 131 5. ICT기반첨단해상교통안전관리체계구축
2017 년해사안전시행계획 2017. 5. 요약본 목차. 해사안전시행계획의개요 1. 해양사고현황및여건 5. '16 년성과및반성 13. '17 년추진계획 17 1. 선박안전신뢰성제고및맞춤형안전관리 25 2. 자율적안전관리기반확대및해사안전관리체계고도화 65 3. 범바다안전의식의획기적전환유도 115 4. 해상종사자역량제고와고품질복지제공 131 5. ICT기반첨단해상교통안전관리체계구축
<C1A1C1A2C2F8C1A6BDC3C0E55F E786C7378>
 점접착제 1-No. 20150900 Multi Client Report 점 접착제시장분석및전망 (2015) Sep., 2015 화학경제연구원 CHEMICAL MARKET RESEARCH INC. #1204, JnK Digital Tower, 111 Digital 26th, Guro-gu, Seoul 152-050, Korea TEL : +822-6124-6660
점접착제 1-No. 20150900 Multi Client Report 점 접착제시장분석및전망 (2015) Sep., 2015 화학경제연구원 CHEMICAL MARKET RESEARCH INC. #1204, JnK Digital Tower, 111 Digital 26th, Guro-gu, Seoul 152-050, Korea TEL : +822-6124-6660
장애인건강관리사업
 장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
2010교육프로그램_08-0000
 2010 교육프로그램안내 메카트로닉스및나노융합기업지원서비스사업 Contents 나노융합실용화센터 대구기계부품연구원 경북대학교 계명대학교 영진전문대학 영남이공대학 2 4 6 8 18 30 32 36 38 42 3 2010 교육프로그램안내 메카트로닉스및나노융합기업지원서비스사업 메카트로닉스 및 나노융합 기업지원서비스사업 개요 비 전 교육내용 현장생산인력 및 연구인력의
2010 교육프로그램안내 메카트로닉스및나노융합기업지원서비스사업 Contents 나노융합실용화센터 대구기계부품연구원 경북대학교 계명대학교 영진전문대학 영남이공대학 2 4 6 8 18 30 32 36 38 42 3 2010 교육프로그램안내 메카트로닉스및나노융합기업지원서비스사업 메카트로닉스 및 나노융합 기업지원서비스사업 개요 비 전 교육내용 현장생산인력 및 연구인력의
m (-6933, `12.5.2) ( ),,,,.,. 2 2 ( ) 1 2 (( 高 ) M10 110) 2,280, H, H.. - (, ) H, H, H. - ( 引拔 ), H,. (-6933, `12.5.2) ( ),. 3 (2,280), (, ) ( 共
 ( ),,,,.,. 2 2 ( ) 1 2 (( 高 ) M10 110) 2,280, H, H.. - (, ) H, H, H. - ( 引拔 ), H,. (-6933, `12.5.2) ( ),. 3 (2,280), (, ) ( 共") 연번주요지적사항처분요구조치현황 감사결과처분요구및조치현황 No. 1 m () ( : ) 3 [(1),, ], 2. 3 2013 6~12 11( 2.7), 399KW. - 2 - m (-6933, `12.5.2) (2014-56),,,,.,. 2 2 ( ) 1 2 (( 高 ) M10 110) 2,280, H, H.. - (, ) H, H, H. - ( 引拔 ),
연번주요지적사항처분요구조치현황 감사결과처분요구및조치현황 No. 1 m () ( : ) 3 [(1),, ], 2. 3 2013 6~12 11( 2.7), 399KW. - 2 - m (-6933, `12.5.2) (2014-56),,,,.,. 2 2 ( ) 1 2 (( 高 ) M10 110) 2,280, H, H.. - (, ) H, H, H. - ( 引拔 ),
경남도립거창대학 5 개년발전전략 GPS 2020( 안 )
") 경남도립거창대학 5 개년발전전략 GPS 2020( 안 ) 2016. 3 GPS 2020 본과업은대학발전 TASK FORCE 팀에 의하여연구되었습니다. 2016. 3 경남도립거창대학 5 개년발전전략 GPS 2020 Ⅰ 1. 8 2. 8 3. 12 4. 13 5. 14 6. 16 7. 17 Ⅱ 1. 20 2. 21 3. 24 4. 25 Ⅲ 1. 28 2. 29
경남도립거창대학 5 개년발전전략 GPS 2020( 안 ) 2016. 3 GPS 2020 본과업은대학발전 TASK FORCE 팀에 의하여연구되었습니다. 2016. 3 경남도립거창대학 5 개년발전전략 GPS 2020 Ⅰ 1. 8 2. 8 3. 12 4. 13 5. 14 6. 16 7. 17 Ⅱ 1. 20 2. 21 3. 24 4. 25 Ⅲ 1. 28 2. 29
[11하예타] 교외선 인쇄본_ver3.hwp
![[11하예타] 교외선 인쇄본_ver3.hwp](/thumbs/81/84006372.jpg "[11하예타] 교외선 인쇄본_ver3.hwp") 2012 년도예비타당성조사보고서 교외선 ( 능곡 ~ 의정부 ) 철도사업 2012. 7. 요약 요약 제 1 장예비타당성조사의개요 1. 사업추진배경 2000 5 16, 2004 4 1,, 2006 -,, 39,., ~~, 2. 사업의추진경위및추진주체 2004. 12: (~) () - 21 (B/C=0.34). 2010. 04~2012. 02: (~) () - (B/C=0.53,
2012 년도예비타당성조사보고서 교외선 ( 능곡 ~ 의정부 ) 철도사업 2012. 7. 요약 요약 제 1 장예비타당성조사의개요 1. 사업추진배경 2000 5 16, 2004 4 1,, 2006 -,, 39,., ~~, 2. 사업의추진경위및추진주체 2004. 12: (~) () - 21 (B/C=0.34). 2010. 04~2012. 02: (~) () - (B/C=0.53,
ºñÁ¤±Ô±Ù·ÎÀÇ ½ÇÅÂ¿Í °úÁ¦.hwp
 비정규근로의 실태와 정책과제 요약 i ii 비정규근로의 실태와 정책과제(II) 요약 iii iv 비정규근로의 실태와 정책과제(II) 요약 v vi 비정규근로의 실태와 정책과제(II) 요약 vii 제1장 서 론 1 2 비정규근로의 실태와 정책과제(Ⅱ) 제1장 서 론 3 4 비정규근로의 실태와 정책과제(Ⅱ) 제1장 서 론 5 6 비정규근로의
비정규근로의 실태와 정책과제 요약 i ii 비정규근로의 실태와 정책과제(II) 요약 iii iv 비정규근로의 실태와 정책과제(II) 요약 v vi 비정규근로의 실태와 정책과제(II) 요약 vii 제1장 서 론 1 2 비정규근로의 실태와 정책과제(Ⅱ) 제1장 서 론 3 4 비정규근로의 실태와 정책과제(Ⅱ) 제1장 서 론 5 6 비정규근로의
슬라이드 1
 ment Perspective (주)아임굿은 빅데이터 기술력, 반응형웹 제작, 온라인마케팅 노하우를 겸비한 IT 솔루션개발 및 마케팅 전문 기업입니다. 웹 정보를 수집하는 크롟링 시스템과 대량의 데이터를 처리하는 빅데이터 기술을 통해 쉽게 지나칠 수 있는 정보를 좀 더 가치있고 흥미로운 결과물로 변화하여 고객에게 제공하고 있습니다. 또한 최근 관심이 높아지고
ment Perspective (주)아임굿은 빅데이터 기술력, 반응형웹 제작, 온라인마케팅 노하우를 겸비한 IT 솔루션개발 및 마케팅 전문 기업입니다. 웹 정보를 수집하는 크롟링 시스템과 대량의 데이터를 처리하는 빅데이터 기술을 통해 쉽게 지나칠 수 있는 정보를 좀 더 가치있고 흥미로운 결과물로 변화하여 고객에게 제공하고 있습니다. 또한 최근 관심이 높아지고
 중소 중견기업 기술로드맵 2017-2019 Technology Roadmap for SME - 로봇 - CONTENTS 전략분야 로봇 1. 개요 1 2. 국내외 정책동향 3 3. 산업이슈 및 동향 9 4. 시장동향 및 전망 17 5. 기술동향 및 이슈 21 6. 중소기업 시장대응전략 28 7. 중소기업 전략제품 29 전략제품 가사지원로봇 1. 개요 38 2.
중소 중견기업 기술로드맵 2017-2019 Technology Roadmap for SME - 로봇 - CONTENTS 전략분야 로봇 1. 개요 1 2. 국내외 정책동향 3 3. 산업이슈 및 동향 9 4. 시장동향 및 전망 17 5. 기술동향 및 이슈 21 6. 중소기업 시장대응전략 28 7. 중소기업 전략제품 29 전략제품 가사지원로봇 1. 개요 38 2.
중점협력국 대상 국가협력전략 ( 9 개국 ) ᆞ 5 ᆞ 30 관계부처 합동
 ᆞ 5 ᆞ 30 관계부처 합동") 중점협력국대상국가협력전략 (9 개국 ) - 콜롬비아, 방글라데시, 아제르바이잔, 르완다, 볼리비아, 우간다, 우즈베키스탄, 인도네시아, 파라과이 - 2016. 5. 30. 관계부처합동 중점협력국 대상 국가협력전략 ( 9 개국 ) 2 0 1 6 ᆞ 5 ᆞ 30 관계부처 합동 총목차 1. 콜롬비아국가협력전략 1 2. 방글라데시국가협력전략 38 3. 아제르바이잔국가협력전략
중점협력국대상국가협력전략 (9 개국 ) - 콜롬비아, 방글라데시, 아제르바이잔, 르완다, 볼리비아, 우간다, 우즈베키스탄, 인도네시아, 파라과이 - 2016. 5. 30. 관계부처합동 중점협력국 대상 국가협력전략 ( 9 개국 ) 2 0 1 6 ᆞ 5 ᆞ 30 관계부처 합동 총목차 1. 콜롬비아국가협력전략 1 2. 방글라데시국가협력전략 38 3. 아제르바이잔국가협력전략
목차 1. 서론 1 2. 제조용로봇산업동향 5 3. 제조용로봇시장동향 제조용로봇기업및제품동향 결론 23
 제조용로봇기술및시장동향 VOL. 46 2017.3 목차 1. 서론 1 2. 제조용로봇산업동향 5 3. 제조용로봇시장동향 12 4. 제조용로봇기업및제품동향 15 5. 결론 23 제조용로봇기술및시장동향보고서 1. 서론 목적 본보고서는제조용로봇과관련한국내 외기술및시장정보를제공하여산 학 연각계에서사업화 전략수립시참고자료로활용하는데그목적이있음 제조용로봇의정의로봇은인간을모방하여,
제조용로봇기술및시장동향 VOL. 46 2017.3 목차 1. 서론 1 2. 제조용로봇산업동향 5 3. 제조용로봇시장동향 12 4. 제조용로봇기업및제품동향 15 5. 결론 23 제조용로봇기술및시장동향보고서 1. 서론 목적 본보고서는제조용로봇과관련한국내 외기술및시장정보를제공하여산 학 연각계에서사업화 전략수립시참고자료로활용하는데그목적이있음 제조용로봇의정의로봇은인간을모방하여,
대한주택보증 ( 주 ) 대한주택보증
 대한주택보증") 대한주택보증 ( 주 ) 335 2.6 대한주택보증 대한주택보증 ( 주 ) 337 1. 평가결과요약 평가부문 종합 경영 부문 (35) 주요 사업 부문 (35) 경영 관리 부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B + 4.500 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 B +
대한주택보증 ( 주 ) 335 2.6 대한주택보증 대한주택보증 ( 주 ) 337 1. 평가결과요약 평가부문 종합 경영 부문 (35) 주요 사업 부문 (35) 경영 관리 부문 (30) 평가지표평가방법점수등급득점 (1) 책임경영구현및공익성제고를위한최고경영진의노력과성과 9등급평가 6 B + 4.500 (2) 이사회 감사기능의활성화노력과성과 9등급평가 4 B +