본연구보고서는 2016 년도경찰청용역연구과제로서연구 내용은경찰청의공식견해가아님 연구진연구책임자 ( 아주대학교법학전문대학원교수, 법학박사 ) 공동연구자 ( 아주대학교법학전문대학원교수, 법학박사 ) 공동연구자 ( 차량IT융합산업협회국장, 경제학석사 ) 공동연구자 ( 도로교
|
|
|
- 원준 봉
- 5 years ago
- Views:
Transcription
1 2016 년경찰청용역보고서 자율주행자동차상용화대비도로교통법 개정방안연구 아주대학교산학협력단
2 본연구보고서는 2016 년도경찰청용역연구과제로서연구 내용은경찰청의공식견해가아님 연구진연구책임자 ( 아주대학교법학전문대학원교수, 법학박사 ) 공동연구자 ( 아주대학교법학전문대학원교수, 법학박사 ) 공동연구자 ( 차량IT융합산업협회국장, 경제학석사 ) 공동연구자 ( 도로교통공단책임연구원, 행정학박사 ) 공동연구자 ( 법무법인천일변호사, 심리학석사 )
3 목차 제1장서론 1 1. 연구의필요성 1 2. 연구의목적 2 3. 주요연구내용 3 제2장자율주행자동차에관한기초적논의 4 제1절자율주행자동차의개념 4 1. 일반적개념정의 4 2. 자동차관리법상자율주행자동차의개념 5 3. 자율주행기술의요소와작동방식 6 제2절자율주행자동차에이르기위한자동화단계 8 1. 미국교통부도로교통안전청의 5단계분류체계 8 2. 미국자동차기술학회의 6단계분류체계 독일연방도로교통청의 5단계분류체계 미국과독일의자율주행시스템발전단계비교 시대별자율주행기술의발전단계 16 제 3 절자율주행자동차의장벽 도로교통참가자의대응방식 공간및교통계획 기반시설 아날로그및디지털 법 윤리문제 IT-보안 기술 21 제3장차량의자율주행관련국제법규의개정동향 2 2 제 1 절문제제기 2
4 제2절자율주행관련국제협약의개정논의 비엔나협약 제네바협약 검토 27 제3절국제협약을고려한도로교통법개정방안 82 제4장주요국가의자율주행자동차기술개발현황과관련입법 0 3 제 1 절미국 개관 자율주행자동차기술개발현황 자율주행자동차관련입법현황 38 가. 네바다주 38 (1) 자율주행자동차관련개념정의 38 (2) 자율주행자동차시험운행요건 39 (3) 자율주행자동차등록기준 40 (4) 자동차제조업자의책임 40 (5) 자율주행자동차주행을위한규정의채택 41 (6) 자율주행자동차시험주행을위한네바다주행정규정 41 나. 캘리포니아주 42 (1) 자율주행자동차관련개념정의 43 (2) 자율주행자동차시험운행요건 43 (3) 자율주행자동차시험운행신청에대한승인요건 4 (4) 자율주행자동차시험운행의승인요건 45 (5) 차량국의규정마련의무 45 (6) 자율주행자동차시험주행을위한캘리포니아주행정규정 46 다. 자율주행자동차교통사고 47 (1) 구글카사고 47 (2) 테슬라모델 S 사고 47 제 2 절독일 개관 자율주행자동차기술개발현황 49
5 3. 자율주행자동차관련입법현황 59 가. 자율자동차시험운행의근거규정 59 나. 비엔나도로교통협약개정안제출 59 다. 자율주행버스의운행 62 라. 스위스의공공도로에서자율주행버스의운행 63 제3절일본 개관 자율주행자동차기술개발현황 자율주행자동차관련입법현황 85 가. 자율자동차시험운행의근거규정 85 나. 제네바도로교통협약개정논의 85 다. 자율주행자동차에관한법제도적논의 86 (1) 자율주행관련형사책임 86 (2) 자율주행관련행정법규상의의무 87 (3) 자동주행관련민사상의책임 89 (4) 기타 89 제5장자율주행자동차상용화대비도로교통법개정방향 2 9 제1절우리나라자율주행자동차관련기술개발현황 29 제2절우리나라자율주행자동차관련법제연구현황 한국법제연구원 한국교통연구원 한국법제연구원의공동연구 한국도로공사의스마트자율협력주행도로시스템개발 한국교통연구원의자율주행자동차윤리및운전자수용성기초연구 100 제3절도로교통법개정방향에관한전문가설문조사 전문가설문조사의실시목적및목표 전문가설문조사의설계 101 가. 조사방법 101 나. 참여한전문가의범위 102 다. 전문가설문조사실시기간 102
6 3. 주요설문내용 103 가. 운전자및고용주등의의무 103 나. 운전면허 103 다. 자율주행자동차도입시규제사항 설문사항별전문가설문조사의결과 104 가. 운전자및고용주등의의무에관하여 104 (1) 술에취한상태에서의운전금지 ( 제44조 ) 관련 104 (2) 과로한때의운전금지 ( 제45조 ) 관련 105 (3) 운전중휴대용전화사용금지 ( 제49조제1항제10호 ) 관련 105 (4) 운전중영상표시금지 ( 제49 조제1항제11 호 ) 및영상표시장치조작금지관련 106 (5) 좌석안전띠부착의무 ( 제50조, 제67조 ) 관련 107 (6) 교통사고발생시책임주체관련 108 나. 자율주행자동차관련면허취득여부 ( 제43조, 제80조 ) 관련 109 다. 자율주행자동차도입시규제사항신설관련 110 (1) 특정한시간 장소 상황에따른자율주행기능사용의금지필요성 110 (2) 시스템결함으로인한비정상적상황인식시운전자의개입의무인정여부 1 (3) 운전자또는조작자의자율주행자동차내착석위치 12 (4) 운전자의모니터링의무 12 (5) 기타자율주행자동차도입시규제사항의신설 13 제4절자율주행자동차상용화대비도로교통법개정방향 논의의출발점 도로교통법상자율주행자동차관련개념정의필요성 115 가. 현행도로교통법상운전자의해석 115 나. 제네바협약개정안제8조제6항의규정내용 116 다. 자율주행시스템모드를운전자개념에포함시킬것인지여부 운전자의의무 117 가. Level 3에서의도로교통법상운전자의무의규율철학과범위 117 나. 자율주행자동차운행시일반원칙규정의정립 118 다. Level 3의자율주행자동차대비도로교통법상기존운전자의무에대한검토 119 (1) 무면허운전등의금지 19 (2) 술에취한상태에서의운전금지 121 (3) 과로 질병 약물운전등의금지 123
7 (4) 운전중휴대폰, 영상표시장치등의사용및작동금지 124 (5) 좌석안전띠부착의무 126 라. 자율주행프로그램작동시신설및전속규율사항 127 (1) 특정시간, 장소및상황에따른자율주행기능의사용금지 127 (2) 시스템결함으로인한비정상적상황인식시운전자의개입의무 129 (3) 운전자또는조작자의자율주행자동차내좌석위치 131 (4) 운전자의모니터링의무 13 (5) 자율주행시스템의정상적인작동상태에서도인식할수없는상황에대한규율 운전면허및교육제도 135 가. 외국의자율주행자동차면허및교육관련동향 135 (1) 자율주행자동차운전면허도입과관련한현행규정및제도검토 135 (2) 자율주행자동차운전면허도입동향 139 나. 자율주행자동차운전면허제도도입방안 139 (1) 자율주행기술단계와운전면허 139 (2) 제한된자동화단계 (Level 3) 에서의운전면허 140 (3) 완전자동화단계 (Level 4) 에서의운전면허 141 다. 자율주행자동차도입에따른교육제도개선방안 자율주행자동차관련교통사고처리방안및교통사고발생시책임소재 144 가. 형사적책임 - 현행도로교통법과교통사고처리특례법의내용 14 나. Level3 자율주행자동차상용단계에서의도로교통법과교통사고처리특례법의개정방안 144 (1) 도로교통법개정방안 145 (2) 교통사고처리특례법개정방안 147 다. 민사적책임일반 149 라. 현행자동차손해배상보장법과제조물책임법의내용 150 마. Level3 자율주행자동차상용단계에서의자동차손해배상보장법과제조물책임법의개정방안 152 (1) 자동차손해배상보장법의개정 152 (2) 제조물책임법의개정 153 바. 현행보험관련법체계의개정필요 154 사. 소결 자율주행자동차교통사고관련딜렘마상황과그해결방안 155 가. 자율주행시스템모드주행시딜렘마상황 155 나. 딜렘마상황에관한논의 156 다. 법적문제로서딜렘마상황 158
8 7. 자율주행자동차의주행에따른구조적안전확보방안 159 가. 자율주행모드의외부표시 159 나. 자율주행자동차주행기록계의의무적설치필요성 160 다. 주행기록의경찰관열람방안 교통안전시설개선및기타자율주행자동차관련개정의필요성 160 가. 교통안전시설개선의방향 160 나. 자율주행자동차안전측면규제및도로이용자안전성확보방향 165 제 6 장결론및전망 168 참고문헌 170 첨부자료 : 자율주행자동차상용화대비도로교통법개정방향에관한전문가 설문조사지 172
9 표목차 < 표 1> 미국도로교통안전청 (NHTSA) 의자율주행기술발전 5 단계 9 < 표 2> 미국자동차기술학회 (SAE) 의자율주행기술발전 6단계 1 1 < 표 3> BASt 의자율주행기술발전 5단계 4 1 < 표 4> 자율주행기술발전단계비교 61 < 표 5> 자율주행기술의시대별발전과정예상 71 < 표 6> 차의자율주행에관한도로교통법개정방안 82 < 표 7> NCHRP 의인프라설계및운영관련프로젝트 53 < 표 8> SAFESPOT, COOPERS, CVIS 연구개요 5 5 < 표 9> EU 의운전면허기능시험평가항목및세목 136 < 표 10> 국가별기능시험내용및시험용자동차조건 137 < 표 11> EU 의운전면허증에기재되는자동차개조조건 138 < 표 12> 운전하고자하는자동차유형별운전면허제도변경고려사항 140 < 표 13> 제한된자동화단계 (Level 3) 에서의운전면허제도개선사항 141 < 표 14> 완전자동화단계 (Level 4) 에서의운전면허제도개선사항 142 < 표 15> 자율주행자동차도입에따른교육제도개선방안 143
10 그림목차 < 그림 1> GM 슈퍼크루즈 63 < 그림 2> 구글무인차 Self Driving Car 73 < 그림 3> Peloton 자율주행자동차 83 < 그림 4> PROMETHEUS 프로젝트로개발된시험차량 (VaMP, VITA-2) 4 5 < 그림 5> Continental 의운전자모니터링시스템 55 < 그림 6> SAFETY PILOT 프로젝트에사용된시스템과차량 6 5 < 그림 7> Drive C2X 테스트사이트 75 < 그림 8> 스마트키를이용한무인원격주차및자율주행지원 85 < 그림 9> A7 파일럿드라이빙컨셉 95 < 그림 10> Chemnitz 시에서실제주행중인자율주행버스 Arma 36 < 그림 11> Sitten 시 ( 프랑스명칭 Sion시 ) 에서실제주행중인자율주행버스 4 6 < 그림 12> ITS 기술에대한일본정부의지원현황 9 7 < 그림 13> ITS Spot 개요및현황 0 8 < 그림 14> ITS Spot 적용혼잡상황저감기술개요 1 8 < 그림 15> eits 적용트럭군집주행시스템구성도 1 8 < 그림 16> eits 적용기술 2 8 < 그림 17> 혼다자동차의교통혼잡저감기술 48 < 그림 18> 자율주행관련주요정부기술개발정책현황 29 < 그림 19> 국가전략프로젝트추진로드맵계획 39 < 그림 20> 도요타의자율주행기술의완성을위한기술블록 161 < 그림 21> 일본 SIP 의다이나맵을위한프레임워크 162 < 그림 22> 일본 SIP 의범위와내용 162 < 그림 23> 교통안전을위한기본요소와의관계 163 < 그림 24> 통신과안전운전과의관계 - 도요타 163 < 그림 25> 디지털다이나맵구성 164 < 그림 26> 진화된안전한자율주행을기능확보를위한기반기술과환경 165 < 그림 27> 자율주행자동차에따른사고원인 16 < 그림 28> 현행자동차보험체계 16 < 그림 29> 자율주행자동차도입에따른사고조사사례 167 < 그림 30> 사고조사기관의설립예시 167
11 제 1 장서론 1. 연구의필요성 사회의디지털화와인공지능의발전으로교통분야에서도종래의운전자중심자동차에서자동차스스로주변환경을인식하여운행하는자율주행자동차로빠르게진화하고있다. 여기서 자율주행자동차 란자동차 -인프라 ( 도로 ICT) 의모든요소가유기적으로연결된환경에서자율주행기술을토대로운전자또는승객의조작없이스스로주변환경을인식하여위험을판단하고주행경로를계획하는등스스로운행이가능한자동차를말한다. 현행 자동차관리법 제2조제1의3 호도자율주행자동차를 운전자또는승객의조작없이자동차스스로운행이가능한자동차 로정의하고있다. 자율주행자동차의등장은기존에인간의조종에자동차에비하여도로교통체계전반에많은변화를가져오게된다. 이경우자율주행자동차의잠재력으로는 1 교통의안전과이로인한교통사고를획기적으로감소시킬수있다는점, 1) 2 자동차의주행에있어서편의성과안락성을높여준다는점, 3 교통약자의이동편의를증대시킨다는점, 4 도로교통에서혼잡완화와도로수요를감소시킨다는점, 2) 5 환경친화적도로교통을확보할수있다는점등이지적되고있다. 다만자율주행자동차가도입되는경우개인정보침해의위험성, 해킹등보안취약성, 자율주행자동차에의한사고발생시그책임규명이불확실성등위험요소가지적되고있다. 글로벌자동차시장에서자율주행기술을탑재한양산형자동차는 2020년경부터보급이본격화될것으로예상되며 2020년부터 2035년까지북미, 서유럽, 아시아태평양 3개지역의자율주행자동차시장연평균성장률은 85% 에이를것으로전망되고있다. 3) 또한글로벌자동차시장에서해당년도에새로출시되는자동차중자율주행자동차가차지하는비중은 2015 년에 4.4%, 2030년에 40.5%, 2035년에 75.1% 에이를것으로전망되고있다. 4) 이처럼자율주행자동차의시장점유율이지속적으로높아간다는점을주목해보면세계 5위의자동차산업국가인우리나라로서는자율주행자동차의개발과양산에총력을기울이지않을수없다. 이에따라정부는 2020년자율주행자동차상용화를목표로규제개선, 기술개발지원및인프라확충등적극지원을예정하고있고, 국토부의 자동차관리법 등관련법령의개정을토대 1) 우리나라의경우 2014 년한해동안교통사고는총 223,552 건, 1 일평균 건이발생하였다. 총 223,552 건의교통사고로인하여사망한사람의수는 4,762 명이었고, 부상당한사람의수는 337,497 명이었다. ( 최종방문일 : ). 2) 남두희, 자율주행자동차와사회변화, 월간교통 ( 제 220 호 ), 67 쪽. 3) 산업통상자원부 / 미래창조과학부 / 국토교통부 / 경찰청, 자율주행산업융합혁신사업, , 4 쪽. 4) 산업통상자원부 / 미래창조과학부 / 국토교통부 / 경찰청, 자율주행산업융합혁신사업, , 4 쪽. 1
12 로 2016년 2월부터실제도로에서자율주행자동차가시험운행중이다. 자율주행자동차가상용화될경우법적규제도자율주행자동차에상응하게개선되어야한다. 예컨대현행도로교통법은사람에의한운전을기초로하여각종준수사항등을규정하고있기때문에사람에의한운전이아닌자율주행시스템에의한주행을본질로하는자율주행자동차와관련해서는현행도로교통법에의한규제가타당하지않기때문이다. 또한자율주행자동차가상용화되는경우에는자율주행자동차의운행으로인한사고발생시보험이나법적책임의이슈도등장하게된다. 자율주행자동차는센서, SW 등을통해운행되므로교통사고발생시기술적과실여부의판단과관련한논쟁이발생할수있고, 이경우에는도대체사고의주체를누구로정할것인지에관한복잡한문제도등장하게된다. 나아가자율주행자동차와관련한 자동차관리법 등의개정내용은자율주행자동차의시험운행과관련된것일뿐자율주행자동차가상용화된이후의규정으로보기힘들다. 따라서자율주행자동차가상용화된시대를대비한법적지원의관점에서도로교통법상의관련규정의정비와자율주행자동차의상용화에따른차량의안전확보및자율주행자동차관련교통사고발생시책임소재등의문제를해결하기위한법제를정비할필요가있다. 2. 연구의목적 이연구는자율주행자동차시험운행을통해자율주행자동차의안전성이확보된후자율주행자동차가상용화될경우기존운전자중심의도로교통법체계에수정이불가피하다는전제에서출발하여, 운전면허, 운전자의준수사항등자율주행자동차체계에맞는도로교통법의개정방향을제시하고, 특히자율주행자동차가도입되는경우자율주행자동차에의한교통사고발생시법적책임의귀속주체등의문제를해결하기위한관련법리를분석하여, 이를토대로교통사고관련규정의정비방향을제시하는것을목적으로한다. 자율주행자동차는이미오래전부터국내외에서그개발과상용화가논의되었으나, 자율주행자동차와관련한법적지원내지입법적논의는비교적최근에야등장하였다. 그배경에는아마도자율주행자동차와관련한입법적논의가주로자율주행자동차의기술적발전단계에종속되어있고, 따라서자율주행자동차와관련한입법적이고법리적인논의도자율주행자동차가상용화되는단계와결부되어있기때문인것으로보인다. 이점에서자율주행자동차와관련한입법적 법리적논의를진행함에있어서는대표적인자동차생산국임과동시에자율주행자동차의개발이고도로진행되고있는미국, 독일및일본의정책과법제에대한분석이불가피하다. 이연구에서도이들국가에서자율주행자동차관련기술의현황과입법동향에대한분석을기초로우리나라의도로교통법등법제정비방향을제시하고자한다. 2
13 3. 주요연구내용 자율주행자동차상용화대비도로교통법개정방안 의연구목표에도달하기위한일차적인접근방식은자율주행자동차에관한기초적논의를전개하는것이다 ( 제2장 ). 이점에서제2장에서는자율주행자동차의개념과기술발전단계및자율주행자동차의장벽등을논의할것이다. 제3장에서는차량의자율주행관련국제법규의개정동향을소개할것이다. 자동차의운행과관련한국제법규에는제네바협약과비엔나협약이있고, 우리나라는제네바협약에비준하였다. 이점에서자율주행관련국제협약인비엔나협약의주요개정내용과아직도개정절차가진행중인제네바협약의주요개정안을검토한후국제협약을고려한우리나라도로교통법개정방안을제시할것이다. 제4장에서는외국의자율주행자동차기술개발현황과자율주행자동차관련입법현황을분석하고자한다. 조사대상국가는자율주행자동차개발이한창진행되고있는미국, 독일, 일본등 3개국이다. 이들국가에서는자율주행자동차에관한연구 개발이한창진행중에있고, 또한자율주행자동차와관련한입법도부분적으로마쳤거나논의중에있다. 외국의자율주행자동차기술개발현황과입법현황에대한조사를토대로제5장에서는우리나라의자율주행자동차기술개발현황과자율주행자동차가상용화될경우를대비한도로교통법개정방향을제시할것이다. 구체적인논의내용으로는도로교통법정의규정, 운전자의무등, 운전면허및교육제도, 교통사고처리방안및교통사고발생시책임소재, 교통안전시설개선및기타자율주행자동차관련개정필요성등이다. 나아가자율주행자동차가상용화와관련된이슈를논의할것이다. 개별적으로는자율주행자동차도입에따른사회적 윤리적이슈검토와자율주행자동차도입에따른구조적안전조치방안마련등이다. 3
14 제 2 장자율주행자동차에관한기초적논의 자율주행자동차에관한개별적인쟁점들을논의하기에앞서비교적최근에등장한형상인자율주행자동차가구체적으로어떻게이해되며, 그잠재력은무엇인지, 자율주행자동차와관련한개별적인이슈들이무엇인지등에관한총론적관점에서의접근이필요하다. 자율주행자동차에관한기초적논의없이개별적인쟁점을파악할수없기때문이다. 제 1 절자율주행자동차의개념 1. 일반적개념정의자율주행자동차 (Autonomous Vehicles, Selbstfahrende Autos) 란일반적으로 자동차 -인프라 ( 도로 ICT) 의모든요소를유기적으로연결하여자율주행기술을토대로운전자또는승객의조작없이자동차스스로주변환경을인식하여위험을판단하고주행경로를계획하는등스스로운행이가능한자동차 로정의된다. 즉, 자율주행자동차란사람의영향없이주행, 조종및주차가가능한자동차를말한다. 자율주행자동차에대한이러한개념정의는자율주행자동차의핵심토대인자율주행기술 ( 자동차에탑재된기술로서운전자의능동적제어나모니터링없이자동차를운행할수있는능력 ) 이최고도로발전된상태에있는자동차에초점을맞춘것이다. 이점에서현재논의중인자율주행자동차의개념은완전한의미의자율주행자동차의양산및주행을전제로하는목표지향적개념설정이다. 자율주행자동차의개념과관련하여운전자인사람의수동적조작이전혀필요없는자동차를 로봇자동차 (Roboter-Auto) 라고부르기도한다. 이와같이사람의수동적조작이전혀필요없는로봇자동차의경우에는예컨대조종핸들이나엑셀레이트또는브레이크가완전히흠결되어사람의수동적인개입이더이상실현될수없는자동차의유형도생각해볼수있다. 이러한로봇자동차의성격을띠는자율주행자동차는현재구글사에서시험운행중인자율주행자동차에서찾아볼수있다. 2014년 5월 28일일반에공개된구글카 (Google-Autos) 의프로토타입 (Prototyp) 은배터리로움직이며, 시작과종료버튼이있을뿐핸들은조종할수없고브레이크나엑셀을밟을수도없도록되어있다. 이점에서구글카는수동조작을전제로하는자동차에서지속적인기술발전을거듭하여새롭게탄생되는일반적인자율주행자동차관념과는달리처음부터자율주행자동차를전제로하고있다. 그러나자율주행자동차는자율주행자동차의근간이되는핵심기술인자율수행기술내지자율주행시스템이어느정도로발전되었는가에의존된다. 자율주행기술내지자율주행시스템은기술의발전정도에따라점차고도화되는특징을지니고있기때문에자율주행자동차그자체의개념이반드시가장높은수준의자율주행기술에기반을둔자율주행자동차만을의 4
15 미한다고보기는힘들다. 자율주행기술이가장높은수준에이르지아니한경우에도사람의영향이없이자동차의주행이나조종등자율주행기술이적용되는자동차도자율주행자동차로볼수있기때문이다. 자율주행자동차는여러단계를거쳐발전되는과정에있다. 미국이나독일등외국에서자율주행자동차의발전단계를 5단계또는 6단계로구분하고있는이유도바로여기에있다. 5) 이점에서자율주행자동차란 자율주행기술이탑재 적용된자동차 로정의하는것이타당하다. 미국의네바다주도자율주행자동차를 자율주행기술이적용된자동차 를말한다고규정하고있다. 6) 한편, 첨단정보통신기술을기반으로하는점에서자율주행자동차는스마트카, 무인자동차, 커넥티드카등의개념과혼동되기도한다. 그러나스마트카 (Smart Car) 는위치정보제공시스템 (GPS), 장애물및충돌감지시스템등의첨단기술에기반하여자동차운행의효율성을높이는혁신적자동차를의미할뿐보통의자동차와다를바없다. 7) 또한무인자동차와자율주행자동차는운전자인사람이자동차를운전하지않는다는점에서는동일하지만무인자동차의경우에는그조종위치가자동차내부가아닌외부라는차이가있다. 8) 다만, 자율주행자동차가최고도로발전된단계에있는경우에는차량안에있는사람은단순한승객에불과하므로실질적으로무인자동차와동일하게될것이다. 마지막으로커넥티드카 (Conntected Car) 는정보통신기술과자동차를연결시킨것으로양방향인터넷, 모바일서비스등이가능한차량으로서원격시동및히터작동을가능하게하는등사물인터넷기술이채용된차량을말한다. 그러나커넥티드카의경우에는정보의주체가운전자임에반해자율주행자동차에서정보의주체는자율주행시스템그자체라는점에서차이가있다. 9) 2. 자동차관리법상자율주행자동차의개념 2015 년 8 월 11 일에개정되었고 2016 년 2 월 12 일자로시행된 자동차관리법 은자율주행 자동차의상용화를위한법적근거를마련하기위하여자율주행자동차의개념을명시하고 있다. 자동차관리법 제 2 조제 1 의 3 호에의하면, 자율주행자동차란 운전자또는승객의조 작없이자동차스스로운행이가능한자동차 를말한다. 그런데, 자동차관리법 제 2 조제 1 의 3 호에정의되어있는자율주행자동차는단순히 운 전자또는승객의조작없이자동차스스로운행이가능한자동차 라고만정의되어있어, 5) 이에관해서는본장제 2 절참조. 6) NRS 482A.030 7) 김정임, 자율주행차에관한공법적고찰, 한국법학회개최, 2016 년도한 일추계국제학술대회, 자율주행자동차상용화에따른법적제문제, , 31 쪽. 8) 김정임, 자율주행차에관한공법적고찰, 한국법학회개최, 2016 년도한 일추계국제학술대회, 자율주행자동차상용화에따른법적제문제, , 31 쪽. 9) 김정임, 자율주행차에관한공법적고찰, 한국법학회개최, 2016 년도한 일추계국제학술대회, 자율주행자동차상용화에따른법적제문제, , 31 쪽. 5
16 자동차관리법 이전제로하는자율주행자동차가완전한자율주행자동차만을의미하는것은아닌지의문이제기된다. 그러나 자동차관리법 이자율주행자동차의개념을정의하고있는이유는동법제27조제1항단서에규정된자율주행자동차에대한시험 연구목적의운행을가능하게할수있도록하기위함이다. 이와관련하여 자동차관리법 제 27조제1항단서는, 자율주행자동차를시험 연구목적으로운행하려는자는허가대상, 고장감지및경고장치, 기능해제장치, 운행구역, 운전자준수사항등과관련하여국토교통부령으로정하는안전운행요건을갖추어국토교통부장관의임시운행허가를받아야한다 고명시하고있다. 그렇다면 자동차관리법 제 2조제1의3 호에명시되어있는자율주행자동차의개념은자율주행모드와운전자모드가혼재되어있는자동차뿐만아니라운전자나승객의개입을전혀요하지않는가장높은수준의자율주행자동차까지포함하는것으로이해되어야한다. 10) 3. 자율주행기술의요소와작동방식 2016년 2월 12일에제정된국토교통부장관의고시인 자율주행자동차의안전운행요건및시험운행등에관한규정 제 2조제4호는 자율주행시스템 이란운전자의적극적인제어없이주변상황및도로정보를스스로인지하고판단하여자동차의가 감속, 제동또는조향장치를제어하는기능및장치를말한다 고명시하고있다. 또한 자율주행자동차의안전운행요건및시험운행등에관한규정 은자율주행자동차의구조및기능과관련하여조종장치 ( 제10 조 ), 시동시조종장치의선택 ( 제11 조 ), 표시장치 ( 제12 조 ), 기능고장자동감지 ( 제 13조 ), 경고장치 ( 제14 조 ), 운전자우선모드자동전환 ( 제15 조 ), 최고속도제한및전방충돌방지기능 ( 제16 조 ), 운행기록장치등 ( 제17 조 ), 영상기록장치 ( 제18조 ) 등을규정하고있다. 이러한규정내용을종합해보면, 자율주행자동차의안전운행요건및시험운행등에관한규정 은완전한자율주행자동차단계를전제로하고있는것이아니라그이전단계 ( 일반적으로 3단계 ) 의기술요소를규정하고있는것으로이해할수있다. 자율주행자동차는자율주행기술이탑재 적용되는자동차를말한다. 자율주행기술이자동차의자율주행을이끌기때문이다. 이점에서자율주행자동차의작동에서핵심적인것은바로자율주행기술이다. 자율주행기술내지자율주행시스템은운전지원시스템, 통신시스템, 요소기술등이통합된기술이다. 즉, 이러한시스템과기술이유기적으로결합된것이자율주행자동차이다. 이점에서자율주행기술내지자율주행시스템의개별적구성요소들을이해할필요가있다. 우선, 운전지원시스템은차선유지지원, 차간거리제어, 주차지원, 차선변경지원, 합 분류지 10) 윤지영 / 윤정숙 / 임석순 / 김대식 / 김영환 / 오영근, 법과학을적용한형사사법의선진화방안 (Ⅵ), 한국형사정책연구원, 2015, 188 쪽. 6
17 원, 좌우절지원, 자동발진 / 정지지원, 충돌피해경감 / 회피등을말한다. 통신시스템은차대차간 (V2V) 통신시스템, 도로대차간통신시스템 (V2I), 보행차대차간통신시스템등교통인프라와연결되어주행관련정보를교환함으로써상황을예측하고대응할수있게한다. 마지막으로요소기술은인지기술, 판단기술, 조작기술, 시스템설계, HMI(Human-Machine-Interface) 등을말한다. 대표적으로인식기술은다양한센터로부터데이터를융합시키고이를저장된매침과비교하여다른차량, 교통제어장치, 보행자나장애물등에어떻게반응할지를결정하는일련의소프트웨어프로세스를포함한다. 자율주행기술의구성요소들을유기적으로결합시킨자율주행자동차의작동방식에관해서는구글카와다른자동차생산업체에서양산하고자하는자율주행자동차를예로들어설명해볼수있다. 구글카는지금까지수백만킬로미터에달하는거리를시험운행하였다. 이과정에서복잡한도로교통과산악지대의도로에서도시험운행이이루어졌다. 모든상황에서실수없는주행이가능하도록하기위하여구글사는수많은기술적보조수단을활용하였다. 이와관련하여가장중요한기술적수단이바로차량의천장에부착시킨고도로민감한레이저였다. 이레이저를통하여짧은시간내에차량주변의환경을인식하도록하고, 이렇게녹화된정보로부터상세화된 3차원의카드를작성할수있게된다. 차량에부탁된그밖의센서들은측정된정보를보완한다음마지막으로차량내설치된컴퓨터가이러한보완된정보와 3차원의카드를비교한다. 차량에설치된센서로는예컨대차량의앞범퍼와뒤범퍼에조립된레이더측정기기이다. 이러한레이저측정기기를통하여차량이신속하게교통에참가할수있도록해줌과동시에예상하지않게발생하는장애물을피할수있게해준다. 또한구글카에는교통신호와교통표지판을녹화하는카메라가작동한다. 구글카는이러한교통정보를평가하여자신의주행을교통신호와교통표지판에상응하게한다. 그밖에 GPS 수신기와차바퀴에달린수많은측정기기들이있다. 차량의위치는 GPS와이른바관성항법장치를통하여녹화된다. 또한 GPS와관성항법장치는차량바퀴의움직임을통제한다. 구글카와는달리 Benz 차량양산업체인 Daimler 사가구상하는자율주행자동차는값비싼레이저스캐너와레이더스캐너를차량의천장에부착하지않는대신차량내부에부착된스테레오카메라와광역레이더및근접레이더를통하여자율주행차량의주행을가능하게하고자한다. 물론차량의범퍼하단부와상단및후미부분에다수의센서도설치되어있다. 7
18 제 2 절자율주행자동차에이르기위한자동화단계 구글사가시험주행하고있는구글카는이전단계의기술을전제로하지않고처음부터사람에의한운전대의조종이필요없는자율주행자동차를의도하고있다. 그러나대부분의양산차업계에서는기존의자동화기술을바탕으로점진적으로발전과정을거듭하여최종적으로자율주행자동차를생산하는것을목표로삼고있다. 이와관련하여선진외국에서는자율주행자동차에이르기위한자동화단계를 5단계또는 6단계로구분하고있다. 여기서자율주행자동차에이르기위한자동화단계란한편으로는자율주행자동차의토대인자율주행기술내지자율주행시스템의발전단계를의미함과동시에다른한편으로는운전자인사람의자동차에대한개입의정도를완화하는단계를의미하기도한다. 그렇지만세계적으로자율주행자동차의자동화단계에관한합의된입장은존재하지않고있다. 이점에서미국교통부도로교통안전청 (NHTSA) 의 5단계분류체계와미국자동차기술학회 (SAE) 의 6단계분류체계, 독일연방도로교통청 (BASt) 의 5단계분류체계를소개할것이다. 1. 미국교통부도로교통안전청의 5단계분류체계미국교통부산하도로교통안전청 (NHTSA: National Highway Traffic Safety Administration) 은자율주행기술을 0단계 (Level 0) 부터 4단계 (Level 4) 까지총 5단계로분류하고있다. 도로교통안전청의 5단계분류체계가세계적으로가장보편적으로수용되고있다. Level 0은 비자동화 (No-Automation) 단계 로서운전자가항상제동, 조향, 감속및동력등주요자동차조종과관련된역할을수행하고, 주행감시및안전운행의역할을수행하는단계를말한다. 차량의전방충돌경고 (FCW), 차선이탈경고 (LDWS) 등의기술수준이 Level 0에해당하는것으로보고있다. 제0단계에서는운전자인사람이차량의주행을감시 통제해야한다. Level 1은 기능제한자동화 (Function-specific Automation) 단계 로서여러자동화기능이조합되어운행되지못하기때문에운전자가자동차에대한제어권을보유하고있는단계를말한다. 크루즈콘트롤 (Cruse Control), 자동정지장치 (Automatic Braking), 차선유지장치 (Lane Keeping) 등이 Level 1의자동화기술에해당한다. Level 1에서는운전자인사람이차량에대한제어권을보유하고있으므로운전자가모니터링을해야한다. Level 2는 복합기능자동화 (Combined Function Automation) 단계 로서특정주행환경에서두개이상의제어기능이조화롭게작동하지만운전자가여전히모니터링및안전에대한책임을지고자동차에대한제어권을보유해야하는단계를말한다. 적응식크루즈컨트 8
19 롤 (ACC: Adaptive Cruse Control) 시스템이 Level 2의자율주행기술의대표적인예이다. Level 2에서는자율주행기술이이전단계보다더향상되었지만운전자가여전히모니터링을해야하므로운전자인사람이운전의주체가된다. Level 3는 제한된자동화 (Limited Self-Driving Automation) 단계 로서특정한도로및운행환경에서차량의모든기능을자동적으로제어하는것이가능하고필요에따라운전자가제어기능을수동으로전환할수있는수준을말한다. 현재구글사가개발하고있는자율주행자동차가 Level 3 수준에있는것으로볼수있다. Level 3에서는자율주행자동차가자율주행모드를기반으로하지만, 운전자의제어가필요한경우자율주행시스템이운전자에게경보신호를제공하여운전자로하여금운전자모드로주행할수있도록예정되어있다. 즉, Level 3에서는자율주행자동차가자율주행모드와운전자모드가혼재된방식을갖추고있다. 따라서 Level 3에서는자율주행모드로주행할경우에는자율주행시스템이주행을하는것이지만, 운전자모드로운전하는경우에는운전자인사람이운전의주체가된다. Level 4는 완전자동화 (Full Self-Driving Automation) 단계 로서도로환경에상관없이탑승자가목적지만입력하면자동차가운행조건을스스로파악하고운행하여목적지까지이동하는완벽한자율주행자동차로서이른바무인자동차와그개념이유사하다. Level 4에서는자동차의모든기능이자율주행시스템에의하여운영되기때문에이경우운전의주체는오로지자율주행시스템이고, 자율주행자동차에탑승한사람은일종의 승객 에불과할뿐이다. 미국도로교통안전청 (NHTSA) 의 5단계분류방식을도표로표현하면다음과같다. 자동화단계 Level 0 Level 1 < 표 1> 미국도로교통안전청 (NHTSA) 의자율주행기술발전 5단계 11) 특징 주요내용 운전주체 - 운전자가항상제동, 조향, 감속및동력등주요자 동차조종과관련된역할을수행하고, 주행감시및비자동안전운행의역할을수행하는단계 (No Automation) - 예 : 전방충돌경고 (FCW), 차선이탈경고 (LDWS) 장치등 운전자 - 현재시중에판매되고있는일반차종 - 여러자동화기능이조합되어운행되지못하기때문에 기능제한자동화 운전자가자동차에대한제어권을보유하고있는단계 (Function-specific - 예 : 크루즈콘트롤 (Cruse Control), 자동정지장치 운전자 Automation) (Automatic Braking), 차선유지장치 (Lane Keeping) 등 - 현재시중에판매되고있는특정고급차종 9
20 - 특정주행환경에서두개이상의제어기능이조화롭 Level 2 복합기능자동화 (Combined Function Automation) 게작동하지만운전자가여전히모니터링및안전에대한책임을지고자동차에대한제어권을보유해야하는단계 - 예 : 적응식정속주행시스템 (ACC: Adaptive Cruse Control) 운전자 - 일부상용화진행중 - 특정교통및환경상황에서주행이자동차자동화시 제한된자동화 스템에전부의존하는단계 Level 3 (Limited Self-Driving - 자율주행모드를기반으로하되, 운전자의제어가필요한경우경보신호제공하여운전자모드로주행 ( 자 시스템 / 운전자 Automation) 율주행모드 + 운전자모드 ) 완전자동화 - 현재연구개발진행중 - 자동차가출발부터목적지까지모든안전기능을제 Level 4 (Full Self-Driving 어하고그상태를모니터링하는단계 시스템 Automation) - 차량내의사람은승객에불과 2. 미국자동차기술학회의 6단계분류체계미국자동차기술학회 (SAE) 는자동차의자율주행기술을 6단계로분류하면서그기준으로 4 개항목을제시하고있다. 4개의항목으로는, 1 조향 ( 횡방향 ), 엑셀 / 브레이크 ( 종방향 ) 등핵심제어의주체가누구인가?, 2 운전환경의모니터링주체는누구인가?, 3 동적운전업무중 ( 비상시 ) 대비책의주체는누구인가?, 4 시스템운전모드의유무등이다. Level 0는 비자동 (NoAutomation) 단계 로서사람인운전자가전적으로모든조작을제어하고, 모든동적주행을조정하는단계이다. Level 1은 운전자지원 (Driver Assistance) 단계 로서자동차가조향지원시스템또는가속 / 감속지원시스템에의해실행되지만사람이자동차의동적주행에대한모든기능을수행하는단계이다. Level 1의대표적인기술로는순항제어와자동제동이다. Level 2는 부분자동화 (Partial Automation) 단계 로서주행환경에대한정보를활용하여조향 ( 횡방향 ) 과엑셀 / 브레이크 ( 종방향 ) 등자동차에대한핵심제어기능을시스템이수행할수있는기술을가진단계이지만, 주행환경의모니터링은사람인운전자가하며안전운전의책임도운전자가부담하도록되어있는단계이다. 스티어링과가속및감속을둘다갖춘특정한운전모드를실행한다. Level 2의자율주행기술은현재주차지원시스템, ACC 및차선유 11) 유동훈 / 강경표, 자율주행기술동향 기술수준구분 (SAE, NHTSA, VDA, BASt), 월간교통, ( 통권제 218 호 ), 57 쪽에서재인용. 10
21 지제어기능등으로구현되고있다. Level 3은 조건부자동화 (Conditional Automation) 단계 로서이단계부터는자율주행시스템이주행환경을모니터링한다. 다만, Level 3에서는자율주행시스템이동적운전조작의모든측면을제어하지만, 자율주행시스템이 ( 비상시 ) 운전자의개입을요청하면운전자가적절하게자동차를제어해야하며, 그에따른책임도운전자에게있다. Level 4는 고도자동화 (High Automation) 단계 로서주행에대한핵심제어, 주행환경모니터링및비상시의대처에이르기까지자율주행시스템이수행하지만자율주행시스템이전적으로항상제어하는것은아니다. 즉, 이단계에서는자율주행시스템이운전자로하여금제어하도록요청하였으나운전자가이에응답하지않으면차량이그대비책으로자율주행해야하는단계계로서운전자의즉각적대처가필요없는고도로자동화된자율주행시스템이라할수있다. Level 5는 완전자동화 (Full Automation) 단계로서운전자가대처할수있는모든도로조건과환경에서자율주행시스템이항상주행을담당한다. 미국자동차기술학회 (SAE) 가제시한 6단계의자율주행기술에서특징적인점은 Level 0부터 Level 2까지는운전자가여전히주행환경을모니터링하면서필요한경우자동차에대한완전한제어를할수있는반면, Level 2 이상부터는자율주행시스템이주행환경을모니터링하고운전자의개입을요구하는등자동차에대한조향과감속 / 가속등핵심제어를담당한다는데차이가있다. 또한미국도로교통안전청 (NHTSA) 의 5단계분류방식과의차이점은, 미국자동차기술학회 (SAE) 가제시하는 6단계분류방식에서는자율주행시스템이운전자로하여금제어하도록요청하였으나운전자가이에응답하지않으면차량이그대비책으로자율주행해야하는 Level 4( 고도자동화단계 ) 를추가하고있다는점이다. 따라서미국도로교통안전청 (NHTSA) 의 5단계분류방식중 Level 4는미국자동차기술학회 (SAE) 가제시하는 6단계분류방식중 Level 4와 Level 5를포괄하는것으로이해해야한다. 12) 미국자동차기술학회 (SAE) 의 6단계분류방식을도표로표현하면다음과같다. 자동화 단계 < 표 2> 미국자동차기술학회 (SAE) 의자율주행기술발전 6단계 13) 조향, 가 / 감운전환경의동적운전업시스템운특징내용속등핵심모니터링무중대비전모드의 12) 이지연 / 이승환 / 박유경 / 김영일, 자율협력주행 (Level 2) 을위한 LDM(Local Dynamic Map) 요구사항정의, 한국 ITS 학회 2015 년추계학술대회 ( ), 2 쪽.; 유동훈 / 강경표, 자율주행기술동향 기술수준구분 (SAE, NHTSA, VDA, BASt), 월간교통, ( 통권제 218 호 ), 59 쪽. 13) 유동훈 / 강경표, 자율주행기술동향 기술수준구분 (SAE, NHTSA, VDA, BASt), 월간교통, ( 통권제 218 호 ), 11
22 사람이주행환경을모니터링함운전자가전적으 로모든조작을비자동 Level 0 제어하고, 모든동 (No Automation) 적주행을조정하는단계자동차가조향지원시스템또는가속 / 감속지원시스운전자지원템에의해실행되 Level 1 (Driver 지만사람이자동 Assistance) 차의동적주행에대한모든기능을수행하는단계자동차가조향지원시스템또는가속 / 감속지원시스부분자동화템에의해실행되 Level 2 (Partial 지만주행환경의 Automation) 모니터링은사람이하며안전운전의책임도운전자가부담자율주행시스템이주행환경을모니터링함 제어의주체 주체 책의주체 유무 운전자 운전자 운전자 이용불가 운전자 / 시스템 운전자 운전자 일부시스템모드 시스템 운전자 운전자 일부시스템모드 시스템이운전조 작의모든측면을 제어하지만, 시스 Level 3 조건부자동화 (Conditional Automation) 템이운전자의개입을요청하면운전자가적절하게자동차를제어해 시스템시스템운전자 일부시스템모드 야하며, 그에따 른책임도운전자 가보유 Level 4 고도자동화 (High Automation) 주행에대한핵심제어, 주행환경모니터링및비상시의대처등을모 시스템시스템시스템 일부시스템모드 12
23 두시스템이수행 하지만 시스템이 전적으로항상제 어하는것은아님 Level 5 완전자동화 (Full Automation) 모든도로조건과환경에서시스템이항상주행담당 시스템시스템시스템 모두 시스템모드 3. 독일연방도로교통청의 5단계분류체계독일연방도로교통청 (BASt: Bundesanstalt für Straßenwesen) 은자율주행시스템을 5단계로분류하면서각각의단계별명칭을 Level 로표시하지않고자동차의자율주행의정도로표시하고있다. 즉, 1 운전자주행단계, 2 주행보조단계, 3 일부자동화단계, 4 고도자동화단계, 5 완전자동화단계등 5단계로구분한다. 운전자주행단계 (Driver Only) 란자동차가운행되는모든기간동안오로지운전자만조향 ( 횡방향 ) 과엑셀 / 브레이크 ( 종방향 ) 에대하여지속적으로지배하는단계를말한다. 이는미국도로교통안전청 (NHTSA) 의 5단계분류방식중 Level 0의기술수준에상응하는것이다. 주행보조단계 (Assistiert) 란자동차가운행되는모든기간동안운전자가지속적으로조향 또는 엑셀 / 브레이크등의운전조종을지배하는단계를말한다. 주행보조단계에서는운전자가지속적으로자동차의모든시스템을관찰하여야하고, 항상차량운행을완전하게인수할준비가되어있어야한다. 주행보조단계는미국도로교통안전청 (NHTSA) 의 5단계분류방식중 Level 1의기술수준과유사한단계이다. 부분자동화단계 (Teilautomatisiert) 란일정한시간동안또는특정한상황에서시스템이조향 및 엑셀 / 브레이크등의운전조종을수행하지만, 운전자는여전히시스템을지속적으로관찰해야하고, 항상차량운행을완전하게인수할준비가되어있어야하는단계를말한다. 미국도로교통안전청 (NHTSA) 의 5단계중 Level 2와동일한기술수준이다. 고도자동화단계 (Hochautomatisiert) 란일정한시간동안또는특정한상황에서시스템이조향 및 엑셀 / 브레이크등의운전조종을수행하지만, 운전자는반드시지속적으로시스템을관찰할필요는없고, 다만필요한경우에는시스템이충분한시간을주어운전자에 56 쪽에서재인용. 13
24 게자동차의주행임무를넘겨받으라고요구할수있는단계이다. 모든시스템들이시스템의한계를인식하지만이시스템은모든상황에서위험을최소화할수있는상태에이른단계는아니다. 미국도로교통안전청 (NHTSA) 의 5단계중 Level 3와동일한기술수준이다. 완전자동화단계 (Vollautomatisiert) 란개념정의된적용사례에서시스템이조향과엑셀 / 브레이크등의운전조종을완전하게수행하는단계이다. 이단계에서는운전자가시스템을관찰할필요가없다. 다만, 사전에개념정의된적용사례를이탈하기전에시스템이충분한시간을주어운전자에게자동차의주행임무를넘겨받으라고요구하게된다. 운전자가주행임무를넘겨받지아니한경우에는위험을최소화하는시스템상태로되돌아가게된다. 또한모든시스템들이시스템의한계를인식하게되고, 시스템이모든상황에서위험을최소화하는상태로되돌릴수있게된다. 완전자동화단계는미국도로교통안전청 (NHTSA) 의 5단계중 Level 4와동일한기술수준이다. 독일연방도로교통청의 5단계분류방식을도표로표현하면다음과같다. < 표 3> BASt 의자율주행기술발전 5 단계 14) 자동화단계운전자주행단계 (Driver Only) 주행보조단계 (Assistiert) 부분자동화단계 (Teilautomatisiert) 주요내용 -자동차가운행되는모든기간동안오로지운전자만조향 ( 횡방향 ) 과엑셀 / 브레이크 ( 종방향 ) 에대하여지속적으로지배하는단계 -자동차가운행되는모든기간동안운전자가지속적으로조향 또는 엑셀 / 브레이크등의운전조종을지배하는단계 -운전자는지속적으로자동차의모든시스템을관찰해야함 -운전자는항상차량운행을완전하게인수할준비가되어있어야함 -일정한시간동안또는특정한상황에서시스템이조향 및 엑셀 / 브레이크등의운전조종을수행해야하는단계 -운전자는여전히시스템을지속적으로관찰해야함 -운전자는항상차량운행을완전하게인수할준비가되어있어야함 주요시스템의예시조향과엑셀 / 브레이크에개입하는 ( 주행보조 ) 시스템미작동적응식크루즈컨트롤 (ACC) : -적응식거리및속도유지기능을갖춘종방향주행주차보조 : -주차보조를통한조향 ( 주차공간으로의자동조향, 운전자는엑셀 / 브레이크조종 ) 고속도로보조 : -자동화된종방향및횡방향주행 -고속도로에서최고속도까지주행 -운전자는지속적으로모니터링해야하고운전자주행을요구할경우즉시대응해야함 14
25 고도자동화단계 (Hochautomatisiert) 완전자동화단계 (Vollautomatisiert) -일정한시간동안또는특정한상황에서시스템이조향 및 엑셀 / 브레이크등의운전조종을수행하는단계 -운전자는반드시지속적으로시스템을관찰할필요는없음 -다만필요한경우에는시스템이충분한시간을주어운전자에게자동차의주행임무를넘겨받으라고요구함 -모든시스템들이시스템의한계를인식하지만, 시스템이모든상황에서위험을최소화할수있는상태에이른단계는아님 -개념정의된적용사례에서시스템이조향과엑셀 / 브레이크등의운전조종을완전하게수행하는단계 -운전자는시스템을관찰할필요가없음 -다만, 사전에개념정의된적용사례를이탈하기전에시스템이충분한시간을주어운전자에게자동차의주행임무를넘겨받으라고요구하게됨 -운전자가주행임무를넘겨받지아니한경우에는위험을최소화하는시스템상태로되돌아감 -모든시스템들이시스템의한계를인식하게되고, 시스템이모든상황에서위험을최소화하는상태로되돌릴수있음 고속도로운전사 (Autobahn Chauffeur) : -자동화된종방향및횡방향주행 -고속도로에서최고속도까지주행 -운전자는반드시지속적으로모니터링할필요없음 -충분한시간을부여하여운전자주행을요구할경우운전자은이에대응고속도로파일럿 (Autobahnpilot): -자동화된종방향및횡방향주행 -고속도로에서최고속도까지주행 -운전자는모니터링할필요없음 -운전자가운전자모드주행요청에응하지않는경우자동차는정지됨 4. 미국과독일의자율주행시스템발전단계비교자율주행시스템의발전단계에관한미국자동차엔지니어학회 (SAE) 가제시하는 6단계분류방법에주목해보면, 독일의연방도로교통청은 Level 5에대한정의가없고, 미국의도로교통안전청 (NHTSA) 이제시하는 5단계분류방법중 Level 4, 5가통합적인개념으로정의된것이외에용어도비슷하며내용도대체로유사하다. 독일의연방도로교통청의자율주행기술분류방법과미국자동차기술학회 (SAE) 의자율주행기술수준의구별단계도용어상의차이가있을뿐거의유사한것으로보인다. 이점에서미국자동차기술학회 (SAE) 가제시하는자율주행기술발전단계에기초하여미국도로교통안전청과독일의연방도로교통청의분류방법을대조해보면다음과같다. 14) BASt(Hrsg.), Rechtsfolgen zunehmender Fahrzeugautomatisierung, Gemeinsamer Schlussbericht der Projektgruppe, 2012, 9 쪽. 15
26 < 표 4> 자율주행기술발전단계비교 15) 기술 수준 SAE BASt NHTSA 조향, 가 / 감속등핵심제어의주체 운전환경의 모니터링주 체 동적운전업무중대비책의주체 시스템운전 모드의유무 운전자가주행환경을모니터링 0 비자동운전자주행비자동운전자운전자운전자이용불가 1 운전자지원주행보조 기능제한자 동화 운전자 / 시스템 운전자 운전자 일부 시스템모드 2 부분자동화부분자동화조합기능자동화 시스템운전자운전자 일부 시스템모드 자율주행시스템이주행환경을모니터링 3 조건부자동화고도자동화제한자동화시스템시스템운전자 일부 시스템모드 4 고도자동화완전자동화 시스템시스템시스템 일부 시스템모드 완전자동화 5 완전자동화 - 시스템시스템시스템 전부 시스템모드 5. 시대별자율주행기술의발전단계그렇다면, 자율주행자동차를탄생시키기위한자율주행기술이어느시점에서구현될수있는지의문이제기된다. 즉, 과거부터현재까지어떠한자율주행기술 ( 또는보조시스템 ) 이개발되었으며, 언제로봇이운전대와엑셀레이트및브레이크의작동을완전하게이전받는완전자율주행이구현될수있는지의문이제기된다. 이와관련하여독일의일간지인 Die WirtschaftsWoche 는시대별자율주행기술의발전단계를다음과같이표현하고있다. 15) 이지연 / 이승환 / 박유경 / 김영일, 자율협력주행 (Level 2) 을위한 LDM(Local Dynamic Map) 요구사항정의, 한국 ITS 학회 2015 년추계학술대회 ( ), 2 쪽에서재인용. 16
27 < 표 5> 자율주행기술의시대별발전과정예상 16) - 고도자동화 주행 -고속도로운전수 ( 완전자동화 ) -시내자율주행 -완전자동주차 -스마트폰에의한주차보조 -고속도로파일럿 ( 부분고도화 ) - 자동화된긴급차선변경보조 -교차로보조 - 정체보조 -스마트폰을통한주차 -공사장인식보조 -긴급차선변경보조 - 긴급제동기능 - 보행자인식 기능 -차선변경보조 -차선유지보조 - 주차보조 ( 일부자동 ) ~ ~ ~ 이후 16) 88.html 에서재구성하였음 ( 최종방문일 : ) 17
28 제 3 절자율주행자동차의장벽 자율주행자동차의목표를달성하기위해서는무엇보다도다양한기술적도전을극복해야한다. 물론이경우자율주행기술그자체는자율주행자동차로가는장벽들중하나에불과하다. 자율주행기술전문가들은현재해결되지않고남아있는기술적흠결을보완하면수년또는수십년내로자율주행자동차가등장할것이라고낙관하면서도자율주행자동차로가기위하여해결해야할 7가지의장벽이있음을지적하였다. 1. 도로교통참가자의대응방식자율주행자동차가도입되면기존의운전자인사람이라는요소에대하여많은문제가제기된다. 도로교통에참가한사람은 Level 3 또는 Level 4의자율주행자동차에대하여어떻게대응해야하는가? 이문제는다시금각각의자율주행자동차에탑승한사람들그자체에대하여제기된다. 즉, 자율주행자동차의이용자 ( 일반자동차의경우운전자 ) 가개입할수있다면언제어떠한방식으로개입해야하는가의문제이다. 우려되는부분은자율주행자동차의이용자가자신의자동차가무엇을하고있는지왜그러는것인지이해하지못하거나자율주행시스템을지탱하는컴퓨터를충분하게신뢰하지못함으로인하여나타나는잘못된대응이다. 이와관련되어있는것이바로자율주행자동차의이용자요소로서, 어떠한정보가가장이상적으로어느정도로상세하게이용자에게보고되어야하는지의여부이다. 즉, 자율주행시스템이어느정도의확신을가지고다양한가능성들중에어느하나를결정하여이용자에게알려주어야할것인지문제가제기된다. 또한이와관련하여자율주행자동차가안전하고경제적일뿐만아니라안락하게주행되도록하기위해서는주행방식을어떻게프로그램화해야할것인지도문제된다. 또한더중요한문제는다른도로교통참가자가새로운자율주행자동차에대하여어떻게대응해야할지알고있어야한다는점이다. 예컨대다음신호등이적색인경우에는제한속도인시속 80킬로대신 40킬로로만주행하도록프로그래밍된자율주행자동차는에너지를절감하는장점을가지고있다. 그러나이러한정보를알지못한채자율주행자동차의뒤를따라오는일반자동차의운전자는자율주행자동차의느린주행에스트레스를받게되고, 결과적으로사고의위험을높일수있다. 2. 공간및교통계획 공간계획과교통계획을입안하고집행하는담당자들은자율주행자동차의등장에특히불 안해한다. 이들은장기간에걸쳐비용이많이수반되는도로교통프로젝트를수행한다. 그런 18
29 데자율주행자동차가등장하는경우에는도로교통의모형을어떻게변경해야할것인지문제가제기된다. 공간계획과교통계획을입안 집행하는많은담당자들은교통량이급격하게증가할것이라고우려한다. 예컨대구글카와같이무인으로주행할수있는자율주행자동차가등장하는경우에는자율주행자동차의이용자들이자신의차를이용하여출근한후그차를빈차상태로자신의집에돌려보낸후최근시간에다시금자신의차를부를수가있는데, 이경우에는교통량이급격하게증가할수있다는것이다. 이에는무인의자율주행자동차가등장하는경우에는비싼주차비용을물면서까지자율주행자동차를주차시키지는않을것이라는사고가깔려있다. 그렇지만자율주행자동차의등장으로교통량이감소할것이라고예상하는전문가들도있다. 이들은자율주행자동차의등장으로다양한유형의이동모델이등장할수있을것으로예상한다. 즉, 카쉐어링 (Carsharing), 자율주행택시, 디지털방식으로조직된주행공동체등의방식으로전체적으로주행한거리가줄어들것이라고예상한다. 3. 기반시설 아날로그및디지털교통인프라와교통참가자들간에는일정한상관관계가있다. 즉, 교통참가자가많으면교통인프라가더좋게구축되어야하고, 교통인프라가좋게구축되어있으면교통참가자의수가많아지고교통이용에대한만족감도높아진다. 이와관련하여자율주행자동차가등장하는경우에는도로망을어떻게구축해야할것인지문제가제기된다. 예컨대자율주행자동차의주행에상응하게도로의형태와건설을변경하는것을생각해볼수있다. 다만, 이경우에도자율주행자동차의주행에상응하는교통신호와표지판등을어떻게개선할것인지과제로남아있다. 외국에서는이미자율주행자동차를위한디지털기반구축작업이진행되고있다. 자율주행자동차생산업체는매우상세화된디지털지도를자율주행자동차에매립하여주행의정확성과안전성을확보하고자한다. 모든도로, 도로가에있는모든나무및모든도로표지판과교통신호등이정확하게포착된다. 이를위하여예컨대노키아 (Nokia) 의카드서비스온라인지도서비스및네비게이션회사인 HERE 는미국에서 20개의차량을활용하여매일지도정보를수집하고있다. 1마일당약 1기가바이트상당의데이터가생성된다. 디지털기반시설에는디지털교통표지판또는무전형식에의한교통신호등도포함된다. 이와관련하여저자율주행자동차와디지털기반시설간의통신을 V2I( 차대기반시설 ) 라고한다. 상위개념인 V2x는 V2V( 차대차 ) 와 V2I( 차대기반시설 ) 이외에자율주행자동차와동력화되지않은교통참가자 ( 즉, 보행자, 자전거이용자 ) 간의통신도포함한다. 19
30 4. 법과거도로교통에관한비엔나협약은자율주행자동차에의한주행을허용하지않았으나 2016년에발효된비엔나협약은운전자가언제든지차량시스템에개입할수있는한자율주행시스템에의한주행이허용되는것으로개정되었다. 17) 비엔나협약에서명하지않았거나비준하지않은국가들은비엔나협약상의일정한제한 ( 즉, 차량시스템에개입할수있는한자율주행시스템에의한주행의허용 ) 을고려할필요가없다. 이에해당하는대표적인국가가바로미국이다. 한편, 자율주행자동차의도로에서의주행에대한허용가능성의문제와는달리법적인관점에서보면특히 Level 4의자율주행기술이장착된차량의교통사고에대하여현행법을적용할수있는지문제가제기된다. 그러나이에대해서는지금까지만족할만한결론이도출되지못했다. 자율주행자동차의교통사고에대한민형사상의책임문제는특히논란이되는부분이다. 예컨대잘못프로그래밍된소프트웨어로인한교통사고에대하여자율주행자동차의이용자가민사상책임을부담해야하는지, 형사처벌까지도받을수있는것인지문제되고, 자율주행자동차에아무도탑승하지아니한상태에서주행중에교통사고가발생한경우누가책임을부담해야하는지도의문이다. 또한 Level 4의자율주행자동차의경우에는운전면허가요구되는지, 이를위하여운전면허교육이필요한지도문제로된다. 주행중에휴대폰사용을금지하고있는현행도로교통법의규정은 Level 4의자율주행자동차에서는적용될수없을것이다. 나아가자율주행자동차의보증, 손해배상등과같은쟁점들도등장한다. 마지막으로개인정보보호의문제도각각의문화에따라상이하게다루어지게될것이다. 5. 윤리문제자율주행자동차와관련한윤리적관점에서제기되는문제에대해서는정확한답을구할수없다. 예컨대현재사회에서는도로교통에서일정한수위피해자가발생할수있음을받아들이고있다. 대부분의교통사고가인간의실수에의하여발생하는것이기때문이다. 그러나컴퓨터시스템이차량을조종하는경우에는교통사고로인한사망자의수를많이줄이게될것이다. 이렇게되기위해서는자율주행시스템을방어적으로프로그래밍해야할것이다. 그렇지만사망사건이한건도발생하지않도록너무방어적으로프로그래밍된자율주행차량은어느누구도구매하지않을것이다는점도유의해야한다. 또한자율주행자동차생산자는특정한상황을대비하여미리그상황에대한대응책을고민해야한다. 자율주행자동차가도로를주행하는중에주차되어있는다른차뒤에서갑자기 17) 구체적인개정내용은제 3 장참조. 20
31 뛰어나온어린아이를인식하였으나더이상피할수없게된상황이발생한경우전통적인시나리오에의하면, 1 어린아이를충격하여차에탑승한사람들이피해를입지않도록하는방법, 2 반대차선의차를충격하는방법, 3 주차되어있는다른차에부딪히는방법등 3가지의가능성이존재한다. 이경우반대차선의차를충격하는방법을선택하는것은바람직하지못하다. 그렇다면주차되어있는다른차에부딪히는방법은적절한가? 이경우에는주차되어있는차에누군가탑승하고있을수도있다. 또한자율주행자동차에탑승하고있는사람들이피해를입을위험도커진다. 그렇다면자율주행자동차의생산자는이러한딜레마상황을해결하기위하여자율주행시스템을어떻게프로그래밍해야할것인지근본적인문제가제기된다. 6. IT-보안사이버보안은항상완벽한것은아니다. 언제든지해킹을당할수있기때문이다. 이점에서자율주행자동차생산자는해킹된상황에서도안전하게대응할수있도록자율주행자동차를생산해야한다. 물론이것이성공할것인지는현재로서는지켜볼수밖에없다. 7. 기술마지막으로자율주행기술의발전이다. 이미자율주행자동차의개념그자체로부터자율주행자동차가기술의존적이라는점을알수있다. 물론이경우자율주행기술이단계적이고지속적으로발전되어가는것인지아니면어느한순간에완전한자율주행자동차가양산될수있는것인지도모두기술발전과결부되어있는것이다. 21
32 제 3 장차량의자율주행관련국제법규의개정동향 제 1 절문제제기 자율주행자동차는사람의개입없이자율주행시스템에의하여자동차가주행하는것을특징으로한다. 그러나이와같은차량의자율주행이현행도로교통법하에서허용될수있는지의문이제기된다. 현행도로교통법은사람의의한운전을전제로하고있기때문이다. 물론현행도로교통법은 초보운전자 ( 제2조제27호 ), 모범운전자 ( 제2조제33호 ) 등 운전자 라는용어를사용하고있지만 운전자 의구체적인개념은정의해두지않고있다. 그러나도로교통법의제규정에대한해석으로부터현행도로교통법이사람에의한운전만규율하고있다는점을알수있다. 도로교통법제2조제26호에의하면, 운전 이란도로 ( 제44조 제45조 제54조제1항 제148 조및제148 조의2 의경우에는도로외의곳을포함한다 ) 에서차마를그본래의사용방법에따라사용하는것 ( 조종을포함한다 ) 을말한다 고규정하고있다. 여기서 그본래의용법 이란운전자가이동을목적으로자동차를조종하는행위로보아야한다. 18) 또한판례도도로교통법상의운전의개념은시동을걸고핸들이나가속기또는브레이크등을손이나발로다루어일정한방향과속도로움직이게하여발진하거나적어도발진조작을완료하는것을가리키는것이라고판시 19) 하고있다. 따라서운전의개념내용에주목해보면, 현행도로교통법은사람인운전자에의한발진조작을전제로하지않는자율주행자동차를포착하지못하고있는것이다. 또한현행도로교통법제48조제1항 ( 안전운전및친환경경제운전의의무 ) 에의하면, 모든차의운전자는차의조향장치 ( 操向裝置 ) 와제동장치, 그밖의장치를정확하게조작하여야하며, 도로의교통상황과차의구조및성능에따라다른사람에게위험과장해를주는속도나방법으로운전하여서는아니된다 고명시하고있다. 도로교통법제48조제1항의규정에비추어보면, 차의조향장치와제동장치, 그밖의장치 에대한 ( 사람의 ) 조작이수반되지않는운전유형 ( 즉, 자율주행자동차의주행 ) 은자동차의운전에수반되는사고방지라는도로교통법제48조제1항의취지에반하므로도로교통법상허용되지않는행위가된다. 20) 따라서자동차가자율주행모드로주행되는단계또는완전한자율주행자동차단계에서는이러한도로교통법의규정들이자율주행자동차의주행에부합하게개정되어야할것이다. 그 18) 김정임, 자율주행차에관한공법적고찰, 한국법학회개최, 2016 년도한 일추계국제학술대회, 자율주행자동차상용화에따른법적제문제, , 42 쪽. 19) 대법원 선고 98 다 판결. 20) 이형범, 일본의자율주행자동차관련법적허용성과민사 행정 형사책임연구동향, 월간교통, ( 통권 215 호 ), 79 쪽. 22
33 러나현행도로교통법의많은조문들이이미국제적합의내지국제협약에의하여규정되었다. 이점에서국내법인현행도로교통법의개정에대하여논의하기전에도로교통과관련한국제협약에서차량의 ( 자율 ) 주행을어떻게규율해왔고, 또한차량의자율주행과관련하여어떠한개정논의가전개되고있는지검토해보아야한다. 제 2 절자율주행관련국제협약의개정논의 도로교통과관련한국제협약에는크게두가지가있다. 하나는 1968년 11월 8일에채택된 도로교통표시및신호에관한비엔나협약 (Vienna Convention on Road Signs and Signals, 이하 비엔나협약 이라함 ) 이고, 다른하나는 1949년 9월 19일에채택된 도로및차량교통에관한제네바협약 (Convention on Road Traffic, 이하 제네바협약 이라함 ) 이다. 이두협약은교통규칙의표준화를통한도로교통의안전을그목적으로하고있다. 다만, 비엔나협약은주로유럽국가들이당사국으로가입해있는반면, 제네바협약은아메리카, 아프리카및아시아국가들이주로가입해있다. 비엔나협약의경우우리나라는 1969년 12월 29일에서명만하였을뿐아직까지비준은하지않고있다. 이에반해제네바협약에는 1971 년 6월 14일에서명하여 1971년 7월 14일부터국내에서조약제389 호로발효되었다. 1. 비엔나협약비엔나협약에서차량의자율주행과관련된조항은제8조제1항및제5항과제13조제1항이다. 비엔나협약제8조제1항 ( 운전자 ) 은 모든이동하는차량또는연결차량에는운전자가있어야한다. 21) 고규정하고있다. 또한제8조제5항은 모든운전자는자신의차량을항상지배해야하고자신의동물을운행할수있어야한다. 고규정한다. 나아가제13조제1항 ( 속도와차량간의거리유지 ) 은 모든차량의운전자는주의를기울일수있고자신이부담하는모든차량의이동을항상수행할수있도록하기위하여모든상황에서자신의차량을지배해야한다. 모든차량의운전자는자신의차량의속도를선택함에있어전방으로볼수있는거리내에서모든예측가능한장애로부터자신의차량을정지시킬수있기위하여특히장소적사정, 도로의상태, 자신의차량의상태와적재상황, 날씨상황과교통밀도등상황들을항상고려해야한다. 모든차량의운전자는천천히운전해야하며, 필요한경우에는정지해야하고특히시야가불량한경우등과같은사정이요구되는경우에는천천히운전하거나정지해야한다. 22) 고규정하고있다. 21) Every moving vehicle or combination of vehicles shall have a driver. 22) Every driver of a vehicle shall in all circumstance have his vehicle under control so as to be able to be at all 23
34 그러나지속적으로진화되어가고있는자율주행시스템을법제적으로지원하기위하여비엔나협약에자동차의자율주행과관련한규정을둘필요가있었다. 이에비엔나협약제49조 ( 조약의개정절차 ) 에따른개정작업을담당했던국제연합유럽경제이사회 (United Nations Economic Commission for Europe: UNECE) 의도로교통안전실무그룹 (Working Party on Road Traffic Safty WP.1) 은 2014년 3월에개최된회의에서자동차의자율주행을허용하는내용의비엔나협약수정안에합의하였고, 23) 이수정안은 2014년 3월 26일에채택되었다. 여기서주요개정내용은차량의자율주행과관련한제8조제5항의 2의신설과제39조제1항제3문의신설이었다. 그후 2014년 9월 23일에비엔나협약개정안이국제연합에제출되어 2016년 3월 23일부터그효력을발하게되었다. 비엔나협약의개정내용의골자는차량의주행에영향을미치는시스템은그것이운전자인사람에의하여언제든지거부되거나차단될수있는경우에는허용된다는점이다. 이점에서비엔나협약의개정내용은동협약의가입국인유럽국가들과러시아, 브라질등 73개국이자율주행자동차의시험주행및상용화를추진할수있도록법제적으로뒷받침하고있다는점에그의의를찾을수있다. 차량의자율주행과관련한비엔나협약의개정내용을소개하면다음과같다. < 자율주행관련비엔나협약개정내용 ( 시행중 )> 제8조 ( 운전자 ) (1) 모든이동하는차량또는연결차량에는운전자가있어야한다. (2) 견인용 적재용또는승용에사용되고있는동물과입구에일정한표시가있는특별구역의경우를제외하고는개별가축또는가축의무리에는운전자가있도록국내법에규정할것을권고한다. (3) 모든운전자는필요한신체적이고정신적인특성을가지고있어야하고신체적이고정신적으로운전할수있는상태에있어야한다. (4) 모든차량의운전자는차량의운행에필요한자식과능력을갖추고있어야한다. 그러나이규정은국내법에따른운전교습에장애로작용하는것은아니다. (5) 모든운전자는항상자신의차량을지배해야하고자신의동물을운행할수있어야한다. (5의 2) 차량의운행에영향을주는차량시스템이차륜차량, 차량장치및차륜차량에장착하거나사용할수있는부품과관련하여국제적법기준에따른설계, 장착및이용을위한조건에부합하는경우에는본조제5항및제13조제1항에부합하는것으로본다. 차 times in a positon to perform all manoeuvres required of him. He shall, when adjusting the speed of his vehicle, pay constant regard to the circumstances, in particular the lie of the land, the state of the road, the condition and load of his vehicle, the weather conditions and the density of traffic, so as to be able to stop his vehicle within his range of forward vision and short of any foreseeable obstruction. He shall slow down and if necessary stop whenever circumstance so require, and particularly when visibility is not good. 23) 이개정안은독일, 벨기에, 프랑스, 이탈리아및오스트리아가제안한것이었다. 상세한내용은 ECE-TRANS/WP.1/145, Report of the sixty-eight session of the Working Party on Road Traffic Safety 참조. 24
35 량의운행에영향을주는차량시스템이앞에서언급한국제적법기준에따른설계, 장착및이용을위한조건에부합하지않지만당해차량시스템이운전자에의해제어또는차단될수있는경우에는본조제5항및제13조제1항에부합하는것으로본다. (6) 차량의운전자는자신의차량의운전과는다른모든활동을피할수있어야한다. 국내법규정은차량운전자의전화기사용에관한규정을두어야한다. 국내법규정은모든사안에서이동중에있는차또는원동기장치자전거의운전자가자동송수신장치없이전화기를이용하는행위를금지해야한다. 제39조 ( 기술적규정및차량의검사 ) (1) 국제적교통에서모든동력차량 ( 본협약제1조 p호 ), 모든트레일러및그와연결된모든차량은부록 5에기재된요건에부합해야한다. 또한이러한차량들은운행의안전을확보하고있어야한다. 이러한차량에제8조제5항의2에기재된국제적법기준에따른조립, 장착및사용을위한요건에부합하는시스템, 부품및차량장치가장착되어있는경우에는이러한시스템, 부품및차량장치는부록 5에합치되는것으로본다. (2) ~ (6) < 생략 > 2. 제네바협약제네바협약은우리나라가비준하여현재발효되고있으므로이에관하여보다상세하게살펴볼필요가있다. 제네바협약에서자동차의자율주행과관련한규정은제8조와제10조에서찾아볼수있다. 우선제네바협약제8조제1항에의하면, 일단위로서운행되고있는차량또는연결차량에는각기운전자가있어야한다. 24) 고규정하고있고, 제8조제5항에서는 운전자는항상차량을조종할수있고동물을안내할수있어야한다. 타도로사용자에게접근할때에는운전자는당해타도로사용자의안전을위하여필요한주의를기울여야한다. 25) 고규정하고있다. 또한제네바협약제10조는, 차량의운전자는항상차량의속도를조절하고있어야하며, 또적절하고신중한방법으로운전하여야한다. 운전자는상황에따라필요하다고인정될때특히시야가좋지못할때에는서행하거나정지하여야한다. 26) 고규정하고있다. 결국제네바협약제8조와제10조에따르면운전자의차량조종을전제로하지않는자율주행자동차의주행은허용되지않는것으로해석된다. 제네바협약은모두사람인운전자에의 24) Every vehicle or combination of vehicles proceeding as a unit shall have a driver. 25) Drivers shall at all times be able to control their vehicles or guide their animals. When approaching other road users, they shall take such precautions as may be required for the safety of the latter. 26) The driver of a vehicle shall at all times have its speed under control and shall drive in a reasonable and prudent manner. He shall slow down or stop whenever circumstances so require, and particularly when visibility is not good. 25
36 한자동차의운전을규정하고있기때문이다. 그러나자율주행자동차의상용화문제가제기되자 2015년 3월제네바협약개정안을제출하였고, 2015년 10월국제연합유럽경제이사회 (UNECE) 의도로교통안전실무그룹 (Working Party on Road Traffic Safty WP.1) 에제네바협약의개정안이보고되어현재개정절차가진행중에있다. 자율주행자동차와관련한제네바협약의개정골자는기존의제8조와제10조를존치하되, 제8조에제6항을신설하는것을내용으로한다. 따라서제네바협약의개정안도비엔나협약의개정내용과동일하게자율주행자동차의상용화를뒷받침하기위한내용들을담고있을뿐완전자율주행자동차단계를전제로하는것은아니다. 제네바협약이개정되는경우에도운전자는차량시스템을제어또는차단할수있어야하기때문이다. 제네바협약의개정안제8조제6항의내용을보면다음과같다. < 자율주행관련제네바협약개정안내용 > 제8조 (1) 일단위로서운행되고있는차량또는연결차량에는각기운전자가있어야한다. (2) 견인용 적재용또는승용에사용되고있는동물에는운전자가있어야하며, 입구에일정한표시가있는특별구역에있어서의경우를제외하고는가축에는운전자가따라야한다. (3) 집단으로이동하는차량또는동물에는국내법으로정하는수의운전자가있어야한다. (4) 앞에서서술한집단은필요에따라교통의편의를위하여적당한길이의부분으로분할되어야하고또한각부분의사이에는충분한간격이취해져야한다. 동규정은유목민이이동하는지역에는적용되지아니한다. (5) 운전자는항상차량을조종할수있고또는동물을안내할수있어야한다. 타도로사용자에접근할때에는, 운전자는당해타도로사용자의안전을위하여필요한주의를하여야한다. (6) 차량의주행에영향을주는차량시스템이차량, 차량장비및차량에정착하거나사용할수있는부품과관련하여국제적법기준에따른설계, 장착및이용을위한조건에부합하는경우에는본조제5항및제10조에부합하는것으로본다. 차량의운행에영향을주는차량시스템이앞에서언급한국제적법기준에따른설계, 장착및이용을위한조건에부합하지않지만당해차량시스템이운전자에의해제어또는차단될수있는경우에는본조제5항및제10조에부합하는것으로본다. 27) 제10조차량의운전자는항상차량의속도를조절하고있어야하며, 또적절하고신중한방법으로운전하여야한다. 운전자는상황에따라필요하다고인정될때특히시야가좋지못할때에는서행하거나정지하여야한다. 26
37 3. 검토앞에서언급한도로교통에관한비엔나협약과제네바협약의규정내용은거의유사하다. 이와같이두협약의내용이유사한배경에는제네바협약이체결될 1949년당시만하더라도독일등유럽국가들이 2차대전이후의혼란상황에서제네바협약에가입하지못하였고, 그이후 1960년대에비로소유럽국가들을중심으로비엔나협약이체결되면서아시아국가들은기존의제네바협약에잔류한반면, 유럽국가들은새로이비엔나협약을체결하였기때문인것으로보인다. 그러나중요한것은이미개정된비엔나협약뿐만아니라개정절차가진행중인제네바협약도미국도로교통안전청 (NHTSA) 의자율주행기술발전에관한 Level 2( 특정주행환경에서두개이상의제어기능이조화롭게작동하지만운전자가여전히모니터링및안전에대한책임을지고자동차에대한제어권을보유해야하는단계 ) 가현행국제협약상허용된다는전제하에 Level 3의기술발전과자율주행자동차의사회적이용가능성을염두에둔것이다. 제네바협약제8조에신설하고자하는제6항도자율주행자동차의상용화단계 (Level 3) 를대비한규정으로보인다. 제네바협약제8조의개정안은자동차의운전자가핸들등을조작하지않더라도안전한주행을가능하게하거나가능하게할수있도록지원하는시스템 ( 예컨대 driver assist system) 이관련되는국제적합의또는국제적수준을따르고있다고인정되는경우에는당해시스템을제네바협약제8조제5항 ( 운전자에게핸들등조작의무가있다는점을전제로한규정 ) 하에서도허용하려고하는것이다 ( 개정안제8조제6항제1문 ). 또한당해시스템이국제적합의또는국제적수준에부합하지않더라도운전자가시스템을통제하는것이가능하다면그한도에서당해시스템을허용하려고하는것이다 ( 개정안제8조제6항제2문 ). 제네바협약의개정안은예컨대드라이버어시스트시스템 (driver assist system) 이발전하여운전자의운전능력부족을보완하는사례가늘어가고있지만, 이러한시스템이운전자의판단을매개함이없이독자적으로교통안전을실현할수있는지의여부가완전히해소되지않고있으므로차량의운행에있어서교통의안전을위하여시스템의차단을포함하여적절하게차량을제어하려고하는운전자의의사를중시한종래의법제도를유지할수밖에없다는이해에토대를 27) 제 8 조제 6 항 : Vehicle systems which influence the way vehicles are driven shall be deemed to be in conformity with paragraph 5 of this Article and with Article 10, when they are in conformity with the conditions of construction, fitting and utilization according to international legal instruments concerning wheeled vehicles, equipment and parts which can be fitted and/or be used on wheeled vehicles. Vehicle systems which influence the way vehicles are driven and are not in conformity with the aforementioned conditions of construction, fitting and utilization, shall be deemed to be in conformity with paragraph 5 of this Article and with Article 10, when such systems can be overridden or switched off by the driver. 27
38 두고있는것이다. 이점에서이미개정된비엔나협약의규정내용이나현재개정이진행중인제네바협약의개정안에서는미국도로교통안전청 (NHTSA) 이제시하는완전자동화단계 (Level 4) 를원칙적으로금지하고있는것으로볼수있다. 다만, 도로교통에관한비엔나협약이개정되어 Level 3의자율주행자동차가허용되고있고, 이러한개정이최근 (2016 년 ) 에야발효되고있지만, 국제사회에서는구글카와같은 Level 4의자율주행자동차의도로주행을허용하기위한비엔나협약의개정논의도진행되고있는것으로알려져있다. 28) 이경우에는운전자의개념정의에자율주행시스템또는로봇도포함시켜야할것이다. 제 3 절국제협약을고려한도로교통법개정방안 제네바협약이전제로하고있는자율주행기술의발전단계는미국도로교통안전청 (NHTSA) 의자율주행기술발전에관한 Level 3이다. 물론비엔나협약은관련규정을개정하였음에반해, 제네바협약은개정절차가계속되고있다. 우리나라가비준한제네바협약제8조제6항이개정되는경우에는도로교통법에자율주행자동차의운행과관련한규정을신설해야한다. 이경우도로교통법은비엔나협약이나제네바협약이전제로하고있는것과같이운행에제공되는자동차의안전확보가운전자의책임에맡겨져있다는점에서출발해야한다. 따라서현시점에서는 Level 4의자율주행기술을전제로함이없이 Level 3의자율주행기술에바탕을둔제네바협약의개정안을그대로수용하면될것이다. 다만, 제네바협약이 Level 4의자율주행시스템에의한주행까지허용하는경우에는운전자의개념정의에자율주행시스템또는로봇도포함시켜야할뿐만아니라도로교통법전반에관한변혁적개정이요구되고, 경우에따라서는 자율주행시스템에의하여주행되는차량의도로교통에관한법률 이라는특별법을제정해야할필요도있다. 자율주행기술의 Level 3을전제로한제네바협약의개정안이발효될경우를대비하여우리나라의도로교통법을개정하고자할경우그구체적인방안은다음과같다. < 표 6> 차의자율주행에관한도로교통법개정방안 도로교통법 개정방안 제 48 조 ( 안전운전및친환경경제운전의의무 ) 1 모든차의운전자는차의조향장치 ( 操向裝 28) its-ch, Schwerpunktthema: Entwicklungen in Nachbarländern bieten Potenziale für Synergien, Themenvertiefung: fahrerlose Fahrzeuge, , 4 쪽. 28
39 置 ) 와제동장치, 그밖의장치를정확하게조작하여야하며, 도로의교통상황과차의구조및성능에따라다른사람에게위험과장해를주는속도나방법으로운전하여서는아니된다. 2 모든차의운전자는차를친환경적이고경제적인방법으로운전하여연료소모와탄소배출을줄이도록노력하여야한다. < 신설 > 3 차의운행에영향을주는차량시스템이차량, 차량장비및차량에정착하거나사용할수있는부품과관련하여국제적법기준에따른설계, 장착및이용을위한조건에부합하는경우에는제1항에부합하는것으로본다. 차의운행에영향을주는차량시스템이국제적법기준에따른설계, 장착및이용을위한조건에부합하지않지만운전자가당해차량시스템을제어또는차단할수있는경우에는제1항에부합하는것으로본다. 29
40 제 4 장주요국가의자율주행자동차기술개발현황과관련입법 미국, 독일, 일본등선진외국에서는자율주행자동차의상용화에대비하여관련입법을정비하였거나논의중에있다. 자율주행자동차상용화를위한입법은자율주행시스템의발전에의존하고있다는점에서본장에서는미국, 독일및일본의자율주행자동차기술개발현황, 입법현황및자율주행자동차교통사고와관련한논의진행상황을소개할것이다. 제 1 절미국 1. 개관미국은자율주행자동차분야에서가장선제적으로대응하고있는국가로알려져있다. 이미구글카와테슬라모델S 가자율주행자동차로서시험운행중에있다. 연방정부차원에서는자율주행자동차의상용화에대비한관련정책과규제권고사항등을개발하고있다. 미국도로교통안전청 (NHTSA) 이 2013 년 5월 30일자율주행자동차의안전주행에관한지침을담은 자율주행자동차관련정책의예비선언 (Preliminary Statement of Policy Concerning Automated Vehicles) 을발표하였고, 2016년 9월에는그후속으로 연방자율주행자동차정책 (Federal Automated Vehicles Policy) 을발표하였다. 29) 이정책에서는자율주행자동차의안전운행을확보하기위하여자동차제조사에적용되는총 15개항목의가이드라인이포함되어있다. 이들 15개항목의가이드라인을간략하게소개하면다음과같다. 30) 1 데이터기록및공유 : 수많은데이터를생산및활용하는시스템인자율주행자동차에서데이터는주행상태, 교통사고상황, 시스템오류등을확인할수있는주요정보인만큼충실히기록하고공유하여폭넓게활용할수있어야한다. 2 탑승자사생활보호관리 : 자율주행중어떤데이터가수집 저장되는지운전자가알수있어야하고, 자동차이용자는개인생체정보나행태와같은개인정보의수집을거부할수있어야한다. 3 시스템안전 : 자율주행자동차는시스템오작동이나정지, 교통사고등의상황에안전하게대응할수있는시스템을갖추어야한다. 자동차의안전시스템은객관적인외부검증을거쳐야하고, 기술적문제가발생할때도안전하게작동할수있음이증명되어야한다. 4 자동차사이버보안 : 자율주행자동차는사이버공격을방어할수있는보안시스템을갖 29) 상세한내용은 최종방문일 : ) 참조. 30) 아래의내용은박준환, 최근미국의자율주행자동차관련법 제도변화내용과시사점, 국회입법조사처, 이슈와논점제 1217 호, , 1~3 쪽에서번역된내용을인용한것임. 30
41 추어야한다. 제조사는보안관련프로그램과평가내용을기록해야하고, 이정보는동일산업분야내에서공유되어야한다. 5 사람과기계의인터페이스 : 자율주행과인간조종모드가안전하게전환되어야하고, 특히운전자는자율주행이어려운상황을쉽게인지할수있어야한다. 또한자율주행중에안전운행을위해자동차가보행자나타차량과통신할수있어야하며, 경우에따라도로시설등과도통신이가능해야한다. 6 충돌내구성 : 자율주행자동차는자동차의안전성능에대한 NHTSA 의기준을충족해야하고, 사고시승객을충분히보호할수있음을증명해야한다. 즉, 자율주행자동차도일반자동차와동일한안전기준을만족시키는구조와장치를갖추어야한다. 7 소비자교육및훈련 : 제조사는판매자등에게자율주행의작동원리를설명할수있도록관련직원을교육하여야한다. 더불어제조사와판매자는소비자에게자율주행자동차의기능과한계, 긴급상황대처요령등을충분히설명해야한다. 8 등록및인증 : 자율주행관련모든소프트웨어의업데이트내용이나새로운무인주행기능을 NHTSA 에보고해야한다. 9 충돌이후의행동양식 : 자율주행자동차가충돌후다시운행될때, 제조사는차량의안전함을미리증명해야한다. 즉, 손상된센서나안전제어시스템이완전히복구되었음이입증되지않는한자율주행은허용되지않는다. 10 연방 주 지방법률 : 자율주행자동차는운전자에적용되는각주나지역별법과관습을지켜야한다. 예컨대, 지역별제한속도나유턴금지, 일방도로등을인식할수있어야한다. 또한충돌등긴급상황대처를위해잠시중앙선을넘는등의일시적인법령위반행위도할수있도록한다. 11 윤리적고려사항 : 사람이운전중에여러가지윤리적판단을하는것처럼자율주행프로그램도윤리적측면의결과를초래하게된다. 특히사고위험시어떻게승객과주변을보호하는지에대한판단은매우중요한요소인만큼윤리적판단이요구되는상황별대응전략이나프로그램은정부에보고되어야한다. 12 운영설계영역 : 제조사는다양한도로 환경속에서자율주행자동차의작동방식을정의하여문서화한운영설계를작성해야한다. 운영설계는도로종류나제한속도, 날씨, 주 야간등개별상황속에서자율주행자동차가원활히작동하도록설계된기능이나시스템의정의혹은이를기술한설명서라할수있다. 13 대상물및이벤트감지와반응 : 자율주행자동차가사물과상황을어떻게인식하여, 적절히대응하는지가입증되어야한다. 인식과대응능력은일반운행과충돌방지능력으로구분하여입증해야한다. 31
42 14 비상대처 : 자율주행자동차에기술적오작동과같은비상상황이발생하면안전하게인간운전모드로전환하는등의비상대처전략이있어야한다. 그런데이때의대처는운전자가운전이가능한지, 졸음이나음주상태는아닌지등여러상황이고려된대처여야한다. 15 검증방법 : 제조사는자율주행에사용되는수많은기능이나장치가안전하게작동되는지평가 검증할방법을제시해야한다. 이검증은시뮬레이션은물론시험도로나일반도로에서의테스트를포함하여야한다. 미국정부는총 15개항목의안전및성능에관한심사기준을바탕으로 2013년미국자동차기술학회 (SAE) 에서정한 5등급에맞추어심사를진행하게된다. 주차원에서는 2011년부터자율주행자동차의개발과시험운행을위한법규들을마련하고있다 년 7월현재네바다주 ( ), 플로리다주 ( ), 캘리포니아주 ( ), 미시간주 ( ), 노스다코타주 (2015.3), 테네시주 ( ), 유타주 ( ) 등 7개주와와싱톤디시 ( ) 가자율주행자동차시험운행을허가하고있다. 31) 이들주에서시행되고있는자율주행자동차관련법률들은대부분자율주행자동차의도로시험을허용하기위한것으로도로주행시험을위한준수사항, 신청절차, 요건등을주로다루고있다. 아래에서는미국의자율주행자동차기술개발현황을소개한다음주차원에서특히네바다주와캘리포니아주의자율주행자동차상용화관련법제를소개할것이다. 2. 자율주행자동차기술개발현황미국은실제자율주행자동차관련 R&D 전략을과거부터추진해온가장선도적인국가라고할수있으며, 미국방부가추진했던정부의로봇중심연구들이최근 ICT융합기술과연계한자율주행연구로도발전해오고있으며, 자율주행자동차관련핵심요소기술인센서, 인공지능 (AI), 빅데이터등에대한 R&D 예산을지속적으로확대하고있다. 특히, 2015년 10 월 Strategy for American Innovation 을발표하면서해당 9개중점육성분야에는첨단자동차의상용화를위한지원내용이포함되어있을만큼적극적이다. 미국의자율주행관련기술은크게, 정부차원의기술개발과민간기업및학교 연구소의개발로나눌수있다. 정부차원의기술개발은교통부 ( 연방도로국 ) 32) 산하의 NHTSA 33) 중심의안전위주의기술개 31) 그러나 Arizona 주, Colorado 주, South Dakota 주, Maryland 주, New Hampshire 주등에서는법제화에실패하였거나법안심사가연기되고있다고한다. 예컨대 Maryland 주에서는위원회가부정적의견을제시하였고, Colorado 주에서는무기한연기되었으며, New Hampshire 주에서도법안통과가부정적인것으로예측되고있다. 윤지영 / 윤정숙 / 임석순 / 김대식 / 김영환 / 오영근, 법과학을적용한형사사법의선진화방안 (Ⅵ), 한국형사정책연구원, 2015, 344 쪽. 32) 연방도로국 (FHWA: Federal Hughway Agency) 33) National Highway Traffic Safety Administration 32
43 발과국방부국방고등연구기획청 (DARFA) 34) 중심의고등기술개발중심으로분류할수있으며, 이는실제교통안전을위한기술과, 우수한과학기술의적용이라는측면에서기술개발의목표와추진배경및내용상의차이를파악할수있다. 자동차안전운전을위해자율주행자동차관련기술의개발이이뤄지고있지만, 기술개발의주체와목적에따라, 민간차원의기술개발은크게포드, GM 등의자동차 OEM사중심의안전위주기술개발과구글과같은 IT회사들의서비스위주의기술개발로구분할수있다. 자율주행관련프로젝트를중심으로기술개발현황을살펴보면, 자율주행과관련하여미국에서가장빠른기술개발프로젝트는 1988년부터 PATH에서추진한도로노면에영구자석을삽입하여차량가이드시스템 35) 연구를시작으로다양한자율주행자동차관련연구를수행하고있다. 1988~1989 년영구자석에의한자기장측정을통한차량의위치추정기술을도요타셀리카차량에적용해서전동식자동조향제어시스템을개발하였다. 또한, 1992년에는세계최초로차량군집주행시스템을개발하고샌디에고의 HOV에서 4대의차량을이용하여시연했으며, 자동운전도로시스템 (AHS:Automated Highway System) 은 1997 년미국의캘리포니아주와카네기멜론데에서고속도로의제한된환경하에서자동차군집운행서비스를시연해내기도하였다. 차량의가감속제어를통해차량간격을줄여군집운행을진행함으로써연료및공기저항과교통혼잡을줄이는데기여할수있고, 이와유사한크루즈컨트롤시스템 (ACC) 이벤츠, BMW, 폭스바겐, 도요타등의자동차에장착되고있다. 앞에서언급한바와같이주로, 미국의자율주행자동차및교통시스템개발은교통부 (DOT : Department of Transportation), 국방부 (DoD : Department of Defense), 과학재단 (NSF: National Science Foundation), 에너지부 (DoE: Department of Energy) 등을통해연방정부및주정부의지원으로추진되고있다. 교통부와주정부및민간지원으로여러개의대학과연구기관에서 BRT(Bus Rapid Transit) 을위한 VAA(Vehicle Assist & Automation) 프로그램을수행하고있다. 미네소타주에서는 530 만달러의예산으로 10개버스를이용한군집주행을수행하였고, 라이다센서를이용한충돌예방기술과 GPS기술을이용한횡방향제어기술을적용했다. AC Transit에서는연방정부및캘리포니아주정부의지원 (200만달러 ) 으로 2009년부터자율주행자동차를개발하고있고, Eugene사에서는도로노면에부착된영구자석을통한자율주행기술을연구하고 AC Transit사에서는내부센서, 영구자석및 DGPS 를이용한상호보안기술을적용한자율주행기술을동시에개발하고있다. 샌디에고에서는 470만달러의예산으로광학및레이다센서로 ACC제어 34) Defense Advanced Research Projects Agency 35) 최근골프장에서이용되고있는골프카트무인주행시스템이이기술을활용중 33
44 를기반으로한충동예방및종방향제어를적용한버스의자율주행기술을개발하고있다. 미국은차량운행의안전성과이동성을극대화하기위해새로운서비스의실현을목적으로 Connected Vehicle 프로젝트를통해차량과차량, 차량과도로변인프라의통신시스템을구축하기위한 RITA를통해 2005년부터매년 1억 $ 씩 5년간기술개발을추진했다. 이프로젝트에는미교통부 (DOT) 의주도하에각주의 DoT와 12개의완성차업체등이참여했다. <Connected Vehicle 연구내용 > 분야 Safety Mobility Environment 연구내용 V2V Communications for Safety V2I Communications for Safety Real-time Data Capture and Management Dynamic Mobility Applications Applications for the Environment Real Time Information Synthesis(AERIS) Human Factors Research IntelliDrive Certification Technical and Policy IntelliDrive Test Environments Policy Roadmap Standards and Architecture Harmonization Systems Engineering 또한, 미시간대이동전환센터는미국최초로차로와교차로, 로봇보행자까지완비된실주행공간을구축하기위해 2015년 1월미시간대앤아버캠퍼스지역에총 32에이커규모의무인차시험모형도시 (M-City Project) 구축을추진중에있다. 이는도로곳곳에자율주행자동차와연동하는인터넷기기를설치하고, 도로교통망과연동하는자율주행차실험이가능한공간으로초기투자금인 1000만달러중주정부 ( 미시간주 ) 600만달러지원, 나머지 400만달러는자율주행자동차관련기업 ( 자동차, 보험, 통신사등 ) 15개사가투자하여실험대상자동차의안정성평가및일반도로주행가능여부판단을위한실제도시와같은차량, 신호등, 보행자, 지하도, 일반도로, 고속도로, 비포장도로, 원형교차로, 철도, 다리, 공사구간등의주변환경을조성하게된다. 모형도시의구축목적은자동차업체들이개발중인자율주행자동차를실제주행환경에서시범운행해기술을완성하려는것으로인공지능자동차실현도현실화되고있으며, 포드등자동차업체들은이번 M-City 에공동투자해 2021년까지 Level 4 수준 34
45 의완전한자율주행자동차를개발해미시간남동부의광범위한지역에서실제운행하는것으로목표로하고있다. M-City 모형도시는 5개차로와교차로, 원형교차로 ( 로타리 ), 보행신호와보행로, 버스등다른대중교통수단, 가상건물등이들어서며, 특히, 유동인구를고려한시뮬레이션 ( 모의주행 ) 을위해로봇보행자까지완비하기로했다. 이와는별개로미정부에서는 NCHRP(National Coorperative Highway Research Program) 를통해군집및자율주행자동차기술에대한연구로드맵을작성하였으며, 4가지분야 ( 제도와정책, 인프라설계및운영, 계획, 교통수단 ) 에대한핵심연구프로젝트를도출하였으며, 특히, 인프라설계및운영과관련된프로젝트는다음 36) 과같다. 프로젝트연구성과물기간 / 예산 도로인프라설계 군집 / 자율주행자동차의영향을 예측하기위한도구 유지보수자동차를위한군집 / 자율주행의적용 군집차량시스템과자율주행 차량시스템과의관계 자율주행을고려한교통제어전략 자율주행의성능을향상시키기 위한인프라요소에대한지침 군집 / 자율주행시스템구축에대한 평가를위한모형 유지보수차량과관련된적용에 대한지침 군집주행을위한인프라가 자율주행운영을어떻게지원할 수있는지에대한보고서 자율주행시스템을이용한교통 제어개선방안 18개월 /$750K 36 개월 /$3M 12 개월 /$100K 12 개월 /$250K 36 개월 /$1.5M 군집 / 자율주행을위한전용차로비용 편익분석 18 개월 /$500K 자율주행시스템을위한기하구조 설계 군집 / 자율주행이주및지자체 기관의사이버보안에미치는영향 < 표 7>NCHRP 의인프라설계및운영관련프로젝트 자율주행을지원하기위한도로 설계개선지침 사이버보안관련이슈및대응 방안 18 개월 /$500K 12 개월 /$250K 주및지자체기관을위한인력운용장래인력운용에관한전략 18 개월 /$150K 군집 / 자율주행적용을위한자료 관리전략 자료유지보수에대한기관 실행전략 24 개월 /$500K 민간분야의기술개발은크게자동차 OEM 사측면에서의기술개발과구글등의 ICT 기업에서 의연구개발로구분할수있다. 민간차원에서의자율주행관련기술개발은 GM 에서 1939 년뉴 36) 출처 : Shladover and Gettman 35

46 욕박람회에서자율주행자동차의효시가되는 Futurama 를발표하였고, Futurama 는전용차선에서교통관제센터에서무선조정신호에유도되어주행한것을보면 1939년이전부터자율주행자동차에대한개념을잡고기술개발이추진된것을알수있다. 자동차 OEM사의자율주행자동차관련기술개발의경우기존의 ADAS 37) 의업그레이드를통한운전자안전도향상을위한기술개발을추진중이다. 특히, GM의경우 US 유력지 US Today 의 2013년 8월 30일자보도에의하면 GM은미국의회의공청회에서 2020년까지어느정도자동화된자동차를시장에출시할수있다고증언했으며, GM의 [ 디자인과기술 ] 이란웹사이트를통해현시점에서는 GM의자동차와트럭에는전방자동차의속도에맞추어서크루즈컨트롤을조정하는 Adaptive Cruise Control 이나자동차옆의사각지역에들어오는경우경고장치, 자동주차지원등완전자율주행을위한구성요소는이미가지고있다라고언급하였다. GM은 Super Cruise( 운전자의전방주시를필수로하는 foot-off, hands-off 가가능 ) 라고부르는시스템을 2017년양산을목표로개발하고있고슈퍼크루즈는레이다와카메라를이용하여핸들을조작해서차선안을올바르게달릴수있도록하고레이다가앞을주행하는자동차와의안전한차간거리를유지하고필요한경우에는완전하게정지하도록브레이크를자동으로밟을수있는기술로 Level 3를구현할수있는수준이다. < 그림 1>GM 슈퍼크루즈 2013년 12월 12일 Ford는 2025년이후의자동차가어떻게되어야할것인가의청사진을발표하였고 2014년 1월 22일에는 Ford가 MIT와 Stanford 대학과각각자율주행자동차를공동개발하는것을발표하였으며, 올 2016년초북미오토쇼를통해세계최초로눈길에서의자율주행기술을공개하기도했다. IT기업의대표주자인 Google은 DARPA 무인차대회에서우승한 Standford 대학의프로젝트 37) Advanced Drive Assistance System : 운전자운전지원시스템 36

47 리더인세바스찬스런교수와 CMU의 Chris Urmson 교수를포함한핵심연구원들을영입하여자율주행자동차를개발하고있다. Google 차에는가장핵심기술인 Google 지도가탑재되어있으며, 차량앞과뒤편에 4개의레이다가, 천장에는 3차원라이다, GPS/INS/Encoder 가, 실내에는전방을주시하는 2개의카메라가설치되어차량, 보행자, 도로, 신호등을인식하며자동으로주행한다. Google 은이미토요타프리우스및렉서스 RX450h 차량등십여대의차량을이용하여캘리포니아도로와샌프란시스코도로에서 42만 km( 지구 12바퀴거리 ) 의테스트주행을하였으며, 아직도다양한조건하에서시험주행을하고있으며주행데이터를수집하고있다. 프로젝트리더인세바스찬스런은이를위해, 다음단계로출근길을주행하며테스트할예정이라고밝혔으며, 고속도로상의사슴과같은동물이나, 눈이덮인도로, 경찰수신호와같은실제상황에서는해결해야할상황이너무많다고밝히고있다. 2017년까지구글맵기반의클라우드서비스가가능한구간내에서근거리자율주행자동차의실용화를추진중이다. 또한, 구글은 2015년 12월 /22일오토모티브뉴스에서차세대무인차개발을위해자동차제조사인포드와협력하는방안을논의하고있다고보도했다. < 그림 2> 구글무인차 SelfDrivingCar 대학및연구소의경우대표적으로스탠포드대학은 2008년 10월 1일 CARS(Center for Automotive Research at Stanford) 를발족하고 2010 년 3월 VAIL 38) 로거점을옮겨 R&D 중이다. 지금까지없었던안전하고고성능으로인류가생존하기위한자연환경을유지할수있도록하고그위에운전하는것을즐길수있는자동차를구상하는것으로, 스탠포드대학의다양한분야로부터 34명의교수 연구스탭과학생을모아산업계를리드하는연구자와함께연구활동을진행하고있다. 38) VAIL(Volkswagen Automotive Innovation Lab) : 미국의스탠포드대학이차세대자동차의연구개발로세계적인핵심거점이되고자자동차업체나 ICT 업체등민간기업과같은대학의교직원, 학생의협력을촉진하기위해만든센터로서자율주행기술개발이나그실용화를위해서필요한인프라, 법적정비, 차세대자동차통신기술등업체들이공통되어안고있는큰과제에대해미래의자동차본연의자세를찾는것이목적 37

48 Peloton Technology 의경우는미국의장거리트럭운송업계를목적으로현시점에사업에바로응용할수있도록다양한기술을융합하여특별한전자적인도로인프라가없는프리웨이와로컬도로에서트럭의대열주행을가능하게했는데, 차량간의커뮤니케이션기술 (DSRC), 엔진 브레이크자동제어기술, 광역무선통신네트워크및 Cloud 서비스 Big Data 등을융합한종합적인네트워크시스템서비스로트럭의대열주행지원서비스를사업화하여장거리트럭수송업계에이노베이션을일으키려하고있다. 이는, 연간평균주행거리가 216,000km 이고, 그중 78% 는도시간에인적이드문원야의주행거리를달리는트럭운송업체의요구와맞물려많은기대효과를거둘것으로기대하고있으며, 2014년에는 FedEx, UPS나 Walmart 등의대기업운송업자와파일럿레벨이지만실제의운용을시작하였다. < 그림 3>Peloton 자율주행자동차 3. 자율주행자동차관련입법현황가. 네바다주네바다주는세계최초로자율주행자동차관련법률을제정하였다. 물론이러한입법에는구글사의적극적인로비가큰작용을한것으로알려져있다. 네바다주의자율주행자동차관련법규정은 NRS(The Nevada Revised Statutes) Chapter 482A(autonomous vehicles) 에서총 10개조항에걸쳐명시되어있다. 39) (1) 자율주행자동차관련개념정의 NRS 482A.025 조, 482A.030 조및 482A.040 조는자율주행자동차와관련된개념정의를규정하고있다. 그내용을번역하여옮기면다음과같다. 39) 최종방문일 : ) 38
49 NRS 482A.025 자율주행기술 이란자동차에탑재된기술로서운전자 ( 사람 ) 의능동적제어나모니터링없이자동차를운행할수있는능력을말한다. 자율주행기술 에는능동안전시스템 (Active Safety System), 운전자지원시스템 (System for Driver Assistance) 은포함하지않는다. 또한전자식사각지대감시장치 (Electronic Blind Spot Detection), 충돌예방시스템, 비상제동시스템, 주차보조시스템, 적응식정속주행시스템 (Adaptive Cruise Control), 차선유지보조시스템 (Lane Keeping Assistance System), 차선이탈경고장치 (Lane Departure Warning), 교통체증과대기지원시스템도단독으로또는다른시스템과결합하여자동차에탑재되어서인간의능동적조작이나감독없이도자동차가운행되도록하지않는한자율주행기술에포함되지아니한다. NRS 482A.030 자율주행자동차 는자율주행기술이적용된자동차를말한다. NRS 482A.040 공공도로 는공적권한으로부여된모든길의경계선들간의폭전체를말한다. 그러한길은차량통행목적으로공공의이용에개방된것이어야하며, 공공기관이그길을유지하고있는지여부는불문한다. (2) 자율주행자동차시험운행요건 NRS 482A.060 조와 NRS 482A.070 조는자율주행자동차의시험운행을위한요건을규정하고있다. 이들규정을번역하여옮기면다음과같다. NRS 482A.060 자율주행자동차의시험 : 보험과채권을위한요건. 누구라도자율주행자동차를네바다주의공공도로에서주행시험을하기전에다음의사항을준수하여야한다. 1. 5,000,000 달러에상응하는보험또는관계당국이허용한자기보험의증명서를관계당국에제출할것또는 2. 5,000,000 달러에상응하는현금을예치하거나보증서또는다른형태의허용된담보를관계당국에게재하고유지할것 NRS 482A.070 자율주행자동차의시험운행 : 자동차의안전과제어를위한요건. 자율주행자동차를네바다주의공공도로에서테스트할경우에는자율주행자동차의작동자는다음사항을준수하여야한다. 1. 자율주행자동차의작동자는자율주행자동차에대하여즉각적인수동제어를취할수있는위치에착석할것 39
50 2. 자율주행자동차의안전작동을모니터링할것 3. 자율주행기술이작동하지않거나그밖에다른위급상황이발행한경우자율주행자동 차에대하여즉각적인수동제어를취할수있는역량을갖출것 (3) 자율주행자동차등록기준 NRS 482A.080 조는차량등록을위한연방정부의기준과규정을충족해야하며, 네바다주에서시험운행또는작동을위한자동차의등록기준도충족할것을요구하고있다. 네바다주에서의자율주행자동차등록기준에관한 NRS 482A.080 조를옮기면다음과같다. NRS 482A.080 차량등록을위한연방정부의기준및규정을충족할것 : 네바다주에서공공도로에서의시험운행또는작동을위한요건. 1. 자율주행자동차가자동차로인정되기위한연방정부의모든기준과규정을충족하지못할경우그자율주행자동차는네바다주에서등록될수없다. 2. 자율주행자동차가다음의요건을충족하지못하는경우네바다주의공공도로에서시험운행하거나작동할수없다. (a) 자율주행기술을붙이거나떼어낼수있는수단을장착하고자율주행자동차의작동자가그러한수단에쉽게접근할수있도록할것 (b) 자율주행기술이자율주행자동차에서작동되고있을때이를시각적으로확인할수있도록자율주행자동차내부에이러한기능을하는계기가장착되어있을것 (c) 자율주행기술의오작동이감지되고그러한오작동이자율주행자동차의안전운행에영향을미치게될경우작동자에게자율주행자동차의수동제어를취할것을경고하는수단이장착되어있을것 (d) 네바다주의자동차법규및교통법규를준수하면서작동될수있을것 (4) 자동차제조업자의책임 NRS 482A.090 조는자율주행으로인한손해의발생과관련한자동차제조업자의책임을규정하고있다. NRS 482A.090 제조업자는특정손해에대하여책임을지지아니한다. 제3자에의하여자율주행자동차로변환된경우원래의자동차의제조업자는그러한변환으로인하거나그러한변환을용이하게하기위해설치된장비로인한결함이발생하여사람이부상당한경우책임을지지아니한다. 40
51 (5) 자율주행자동차주행을위한규정의채택 NRS 482A.100 조는네바다주의공공도로에서자율주행자동차의작동을허가하는규정을관계당국이채택하도록규정하고있고, NRS 482A.200 조는자율주행자동차의운행을위한면허관련사항을관계당국이규정할수있음을명시하고있다. 이들규정을옮기면다음과같다. NRS 482A.100 작동권한을부여하는규정의채택 : 자율주행자동차를운행하기위해서는다음의요건을충족해야한다. 1. 관계당국은네바다주의공공도로에서자율주행자동차의운행을허가하는규정을채택한다. 2. 제1항을통하여채택되는규정에는다음의사항을포함하고있어야한다. (a) 자율주행자동차가네바다주의공공도로에서운행되기전에자율주행자동차가갖추어야할요건을제시할것 (b) 네바다주의공공도로에서자율주행자동차가운행되거나시험운행되기위하여요구되는보험조건을제시할것 (c) 자율주행자동차및그작동을위한최소한의안정성기준을수립할것 (d) 자율주행자동차의시험을허용할것 (e) 특정지역에자율주행자동차의시험운행을제한할것 (f) 관계당국이필요하다고결정한것들로서그밖의요건들을제시할것 NRS 482A.200 자율주행자동차를운행할수있는면허에대한승인 : 규정들. 관계당국은네바다주의고속도로에자율주행자동차의운행을위한운전면허승인에대한사항을규정으로정할수있다. 이러한운전면허승인은매우제한적인경우자율주행자동차를능동적으로운행함에있어서사람이요구되지않는다는사실을인지하여야한다. (6) 자율주행자동차시험주행을위한네바다주행정규정 NRS 482A.100 조와 NRS 482A.200 조는네바다주관계당국으로하여금자율주행자동차작동권한을부여하는규정을채택하고, 자율주행자동차의운행을위한운전면허승인에대한사항을규정할수있도록위임하고있다. 이에네바다주행정규정 (Nevada Administrative Regulation: NAC) 제482a 조는자율주행자동차의작동권한과운전면허에관한사항을규정하고있다. 이에관한주요내용을번역하여옮기면다음과같다. NAC 482A.020 작동자. (NRS 482A.100, 482A.200) 본장의목적에따라, 달리규정함이없 41
52 는한자율주행자동차가주행하는동안실질적인탑승여부에관계없이자율주행모드로 작동되는해당자율주행자동차를작동하는사람을작동자라한다. NAC 482A.030 자율주행모드로작동되는자동차의운행면허 : 작동자가실질적으로탑승하지않은상태에서의작동 ; 경우에따라서는작동자를운전자로간주한다. (NRS 482.A.100, 482A.200) 1. 이규정 482A.110 에서달리규정함이없는한네바다주에자율주행자동차로등록된자동차는이규정 482A.190 에따라자율주행자동차의주행을위한운행면허가발급된경우에한해서만자율주행모드로작동할수있다. 운행면허가운전자가실제로해당자동차에탑승하지아니하여도자율주행자동차를자율주행모드로주행할수있도록허가한경우자율주행모드로작동되는자동차가주행하는동안실질적인탑승여부에관계없이자율주행모드로작동되는자율주행자동차를주행하는사람을작동자라한다. 2. 교통법규및네바다주에서운전을하거나주행이되는자동차와운전자에게적용할수있는기타관련법의시행목적에따라자율주행모드로작동되는자율주행자동차의작동자는작동자의실질적인탑승여부에관계없이주행하는동안해당자율주행자동차의운전자라고한다. NAC 482A.040 자율주행자동차운전을위한 G 면허 (G endorsement): 접수비. (NRS 482A.100, 482A.200) 1. 이규정 482A.130 에서별도로규정하고있는경우를제외하고네바다주운전면허증을소지한자중네바다주내에서자율주행모드로주행되는자율주행자동차의작동을원하는자는반드시 NAC 조항에따라관계당국이발급한운전자면허증에 G문자가기재되어있어야한다. 작동면허를원하는자는관계당국에서제공하는신청서를접수해야한다. 2. 자율주행모드로주행하는자율주행자동차의작동을위한운전면허증신청자는작동자가 NAC 482A.030 에따라네바다주교통법규및기타운전자와자동차에적용할수있는관련법의적용대상이됨을알아야한다. 3. 신청자는자율주행모드로주행되는자율주행자동차를작동할수있는능력과자격을갖추고있는지를판단하기위해관계당국이필요하다고판단되는추가정보를제출하여야한다. 4. 자율주행모드로주행되는자율주행자동차운전면허증신청서를접수할경우에는접수비 5달러를납부하여야한다. 나. 캘리포니아주 캘리포니아주에서자율주행자동차관련규정은 자동차법 (Vehicle Code - VEH) DIVISION 16.6.(38750 조 ) 에서명시하고있다. 제 조는자율주행자동차관련개념정의, 자율주행자동 42
53 차시험운행요건, 승인을위한지원서에포함되어야할사항등을규정하고있다. (1) 자율주행자동차관련개념정의캘리포니아주자동차법제38750 조 (a) 는자율주행자동차및관련개념들에대하여구체적으로정의하고있다. 이를옮기면다음과같다 (a) 이법의목적을위하여다음의용어정의가적용된다. (1) 자율주행기술 이란인간의능동적 물리적제어나감독없이도자동차를주행시킬수있는기술을의미한다. (2) (A) 자율주행자동차 란자율주행기술이그자동차에통합되어장착된자동차를의미한다. (B) 자율주행자동차는하나또는그이상의충돌회피시스템이장착된자동차를포함하지않는다. 또한전자식사각지대감시장치 (Electric Blind Spot Detection), 자동긴급제어시스템, 주자보조시스템, 적응식정속주행시스템 (Adaptive Cruise Control), 차선유지보조시스템 (Lane Keeping Assistance system), 차선이탈경고장치 (Lane Departure Warning), 교통체증과대기지원시스템, 그밖에이와유사한다른시스템이운전자를보조하거나안전성을강화시킨다할지라도이러한기능이단독으로또는다른시스템과결합하여자동차에탑재되어서인간의능동적조작이나감독없이도자동차가주행되도록하지않는한이러한시스템을탑재한자동차도자율주행자동차에포함되지않는다. (3) 담당국 이란차량국을의미한다. (4) 자율주행자동차의 작동자 란운전석에앉아있는사람또는운전석에없는경우자율주행기술이작동되도록하는사람을말한다. (5) 자율주행자동차의 제조업자 란 Section 470에정의된사람으로서원래자율주행기술이장착된자동차를만든사람이나본래자율주행기술이자동차제조업자에의해장착되지않은경우자율주행기술을설치함으로써그자동차를자유주행자동차로변환시킨사람을말한다. (2) 자율주행자동차시험운행요건제38750 조 (b) 는자율주행자동차의시험운행을위한요건을규정하고있다. 세부적으로 운전자 에대한요건과 보험또는채권등 에관한요건을명시하고있다 (b) 자율주행자동차는다음의모든요건을충족한경우운행에적합한등급의허가증을소지한운전자에의하여시험운행의목적을위하여공공도로에서운행될수있다. (1) 자율주행자동차는자율주행기술의제조업자에의해지정된피용자, 계약자등의사람만이캘리포니아주의도로에서운행할수있다. (2) 운전자는운전석에앉아서자율주행자동차의안전한작동을감독하고자율주행기술의오작동또는기타긴급상황이발생한경우자율주행자동차의즉각적인수동제어조치를 43
54 취할수있어야한다. (3) 캘리포니아주에서시험운행을시작하기에앞서, 그러한시험운행을수행하는제조업자는 5,000,000 달러상당의보험, 보증서, 또는자가보험 (Self-insurance) 의증명을획득하여야하고, 그러한보험, 보증서, 자가보험의증빙을차량국에제출하여야한다. 제출형태와방법은 subdivision (d) 에따라서채택된규정에따라차량국에의해요구된바를준수하여야한다. (3) 자율주행자동차시험운행신청에대한승인요건제38750 조 (c) 는자율주행자동차시험운행의승인을위한지원서에포함되어야할사항을규정하고있다 (c) (b) 에대한예외로서, 자율주행자동차는제조업자가차량국에지원서를제출하고그러한지원서가 (d) 에따라채택된규정에따라차량국의승인을받을때까지운행되어서는안된다. 이러한지원서에는최소한다음의증명사항을모두포함하고있어야한다. (1) 제조업자는자율주행기술이다음의요건을모두만족시키고있음을증빙하여야한다. (A) 자율주행자동차는자율주행기술을붙이거나떼어낼수있는메커니즘을가지고있고, 자율주행자동차의작동자는용이하게그러한메커니즘에접근할수있어야함 (B) 자율주행자동차는그러한자율주행기술이작동되고있는경우그러한사항을알려주는표지를차량내부에가지고있어야하며그러한표지는시각적으로인식될수있어야함 (C) 자율주행자동차는자율주행자동차가운행하는동안자율주행기술의오작동이감지된다면작동자에게이를경보해주는시스템이장착되어있어야한다.; 그러한경보가주어졌을때시스템은다음의사항을수행하여야한다. (i) 작동자에게자율주행자동차를제어하도록요구할것 (ii) 작동자가자율주행자동차를제어하지않거나할수없을경우, 자율주행자동차는완전히정지할것 (D) 자율주행자동차는작동자가자율주행자동차를제어할수있는여러가지방법을취하는것을가능하게하여야한다. 그러한방법에는브레이크, 가속페달, 운전대 (the steering wheel) 의사용에제한이없어야하며, 자율주행기술이작동되지않을경우그러한사실을작동자에게경보해주어야한다. (E) 자율주행자동차의자율주행기술은그차량모델년도의연방자동차안전기준과모든다른안전기준및주와연방법에규정된성능요건에부합하여야하며, 그규정들을해당법률에따라공표된다. (F) 자율주행기술은그차량모델년도의연방자동차안전기준과적용가능한모든다른안전기준및주와연방법에규정된성능요건을무력화시켜서는안되며, 그규정들을해당법률에따라공표된다. (G) 자율주행자동차는그것이자율모드로작동하고있는동안다른물체 ( 자동차, 물건, 자 44
55 연인을포함한다 ) 와충돌이발생할경우적어도충돌직전 30초동안자율주행기술감지데이터를포착해서저장할수있도록별도의기계장치를가지고있으며, 그러한별도의기계장치는법에의해요구되는다른기계장치와도분리된형태이어야한다. 자율주행기술이감지한데이터즉, 자율주행기술감지데이터는그데이터를다운로드및저장할수있는외부장치에의해그러한기계장치로부터추출될때까지그데이터가보유될수있도록오직그기계장치로부터추출될때까지그데이터가보유될수있도록오직그기계장치에의해서만읽혀질수있는형태로획득 저장되어야한다. 데이터는충돌이있었던날로부터 3년간보존되어야한다. (2) 제조업자는자율주행기술을공공도로에서시험운행하였고 (d) 에따라차량국에의해수립된시험운행기준에부합한다는것을증빙하여야한다. (3) 제조업자는 5,000,000 달러상당의금액에해당하는보증서또는자가보험의증명을 (d) 에따른차량국에의해채택된규정에의해명시된대로유지하고있음을증빙하여야한다. (4) 자율주행자동차시험운행의승인요건제38750 조 (e) 는자율주행자동차의시험운행에대한승인요건을규정하고있다 (e) (1) 차량국은 (c) 에의해제조업자가제출하는지원서가다음의조건을충족할경우승인하여야한다. - 지원자가자율주행자동차가공공도로에서안전하게작동될수있다고차량국이승인하는데필요한시험운전을완료하고모든필요한정보를제출할것 - 지원자가 (d) 에따라차량국에의해채택된규정에규율된모든요건들을준수할것 (2) (1) 에도불구하고무인자동차를작동할수있는자율주행자동차에대한승인을받고자하는경우, 차량국은그러한자동차의안전운행을보장하는데필요한추가적인요건을부여할수있다. 그리고차량국은 (1) 에따라실시한검토결과에비추어볼때공공도로에서자율주행자동차의안전한작동을보장하기위하여운전자석에운전자의착석이필요하다고판단하는경우에는운전자석에운전자의착석을요구할수있다. 차량국은제조업자가무인자동차의작동을승인받기를원할경우지원서의접수와관련된입법사항을공지하여야하며, 지원에대한승인은지원서가제출된날짜이후로 180일이경과하자마자효력이있다. (5) 차량국의규정마련의무제38750 조 (d) 는차량국으로하여금운행승인을위한지원서및승인에대한구체적요건을정하는규정을 2015년 1월 1일까지마련하여야하며, 이러한규정을채택함에있어공청회를실시하여야한다고규정하고있다 (d) (1) 차량국은조속히, 늦어도 2015 년 1 월 1 일까지 (b) 에서요구하고있는보험, 45
56 보증서또는자기보험의증빙제출을위한요건과 (c) 에따른자율주행자동차의작동신청의제출및승인에대한요건을규율하는규정을채택하여야한다. (2) 그규정은 (b) 의목적을위해수립된것뿐만아니라, 차량국이작동자의탑승여부와상관없이자율주행자동차가공공도로에서안전한작동을위해필요하다고인정한시험운행, 장비, 성능기준을포함하여야한다. 이러한규정을개발함에있어서차량국은자동차기술, 자동차안전, 자율시스템디자인등에있어서전문가를보유하고있는캘리포니아간선도로순찰대, 캘리포니아대학교교통연구소또는차량국에의해확인된다른기관과협의할수있다. (3) 차량국은규정을채택함에있어서캘리포니아간선도로순찰대와협의하여공공도로에서자율주행자동차가안전하게작동하기위해필요하다고결정된것들을부가적요건으로설정할수있다. 이러한부가적요건에는공공도로에배치되는자율운행자동차의총대수, 자율주행자동차작동자들에게적용되는새로운면허요건들그리고이규정에의하여발급된어떠한승인이나면허의취소, 정지, 거부를위한규칙도포함될수있으며, 부가적으로포함될수있는사항에는여기서열거된것으로제한되는것은아니다. (4) 차량국은무인자율주행자동차의작동에적용되는규정을채택함에있어서공청회를개최하여야한다. (6) 자율주행자동차시험주행을위한캘리포니아주행정규정제38750 조 (d) 가차량국에대하여운행승인을위한지원서및승인에대한구체적요건을정하는규정을 2015년 1월 1일까지마련할것을규정함에따라캘리포니아주차량국은 2014 년 5월 19일에관련행정규정 (Adopted Regulatory Text) 을제정하였고, 이행정규정은 2014년 9월 16일에발효되었다. 특히이행정규정제 조는자율주행자동차시험운행자의요건을규정하고있다. 행정규정제 조를옮기면다음과같다 자율주행자동차시험운행자요건. 제조업자는다음의요건을충족하는자율주행자동차의시험운전자가작동하거나주행하는경우를제외하고공공도로에서자율주행자동차를시험운행해서는안된다. (a) 자율주행자동차의시험운전자는자동차의작동을지속적으로감독하고즉각적인수동제어조치를취할수있어야한다. (b) 자율주행자동차의시험운전자는제조업자에의해지정된피용자, 계약자등이다. (c) 자율주행자동차의시험운전자는자율주행모드자동차또는기존의일반주행자동차모두에적용할수있는자동차법규 (Vehicle Code) 및지방규정을준수하여야한다. (d) 자율주행자동차의시험운전자는해당차량의자율주행기술의한계를인지하고공공도로에서해당자동차를시험주행하는동안모든상황에서안전하게작동할수있어야한다. 46
57 다. 자율주행자동차교통사고 (1) 구글카사고미국의대표적인자율주행자동차양산회사인구글사는도요타프리우스, 아우디 TT, 렉서스 RX(450h) 등을개조하여지금까지 6년간약 330km 를주행하면서 17차례에걸친작은사고를겪었으나구글사는이러한사고들이모두다른차량의과실로인한것이라고발표했다. 그러나 2016년 2월 14일캘리포니아마운틴뷰에서발생한구글카 (Lexus RX450h) 사고는구글카자체의과실에의한사고라는점에서그의의가있다. 이사고의과정을보면, 사고가발생한현장에서구글카는우회전을하기위하여우회전차선에진입하였는데여러개의모래주머니가도로를막고있는것을발견하여이를피해중앙선이있는차로안쪽으로진입해야했다. 반대편에는버스가있었지만구글카나탑승하고있던엔지니어모두버스가양보할것이라고판단했기때문에그대로진행했다. 그러나버스는양보하지않았고결국안쪽으로진입한구글카는버스의옆면을시속 3km의속도로살짝들이받아펜더와앞바퀴, 운전석쪽센서에손상을입었다. 다만, 사고로인해사망이나부상등의인명피해는없었다. 이사고에서구글사는구글카사고에대한책임을인정하면서, 사고원인에대해서는구글카는버스가속도를늦추거나끼어들수있도록양보할것이라고판단했고, 공간도여유로웠다고판단했다고밝혔다. 40) 구글카사고로인하여자율주행자동차의교통사고에대한법적책임에관한논의가활발하게진행되고있다. (2) 테슬라모델S 사고 2016년 5월 7일미국의전기자동차회사인테슬라모터스 (Tesla Motors) 의자율주행자동차인테슬라모델S 의 2015년도모델이플로리다주의고속도로에서자율주행모드 (Autopilot) 로주행하던중양방향이중앙분리대로분리된고속도로의교차로에서좌회전을하던대형트레일러의측면을충격하고트레일러아랫부분을관통한후도로가의 2개의펜스를뚫고전봇대를들이받아모델S 에타고있던운전자가사망하였다. 이것은자율주행중의자동차로인한최초의사망사고에해당한다. 테슬라측에의하면트레일러의차제가높았을뿐만아니라당일날씨가맑아빛이강한상태였기때문에트레일러의흰색자체를센서가감지하지못해브레이크가작동하지않았을가능성이있다고했다. 또한테슬라모델S 의자율주행모드는사실상운전보조기능에지나 40) 최종방문일 : ) 47
58 지않기때문에기술적으로는 Level 2에해당하므로운전에대한책임이기본적으로운전자측에있다고했다. 2016년 7월 26일미국연방교통안전위원회 (NTSB) 가발표한테슬라오토파일럿사고에대한예비조사결과에의하면테슬라모델S 가충돌전에제한속도인 105km/h 를초과한 119km/h 의속도로달리고있던것으로확인됐다. 이조사결과가발표되면서한편으로는테슬라자율주행모드의제한속도감지및조절기능에대한의문이제기되고있으며, 다른한편으로는자율주행자동차의안전성에대한관심을증폭시켜각주에서자율주행자동차의안전운행관련규정을강화하려는계기가되었다. 제 2 절독일 1. 개관독일에서아직까지자율주행자동차를정의해둔법령은없고, 용어자체도통일되어있지않다. 다만, 일반적으로는무인자동차 (Fahrerlose Transportfahrzeug 또는 Unbemanntes Fahrzeug) 라고부르기도하고, 자율주행자동차 (Autonomes Fahrzeug 또는 Selbstfahrendes Kraftfahrzeug) 라고부르기도한다. 독일은대표적인자동차생산국가이다. 그렇지만독일에서자율주행자동차와관련한정책은비교적최근에등장하였다. 다만, 자율주행자동차와관련한연구는활발하게진행되고있다. 독일연방정부는 2015 년에 자동화되고네트워크화된주행전략 (Strategie automatisiertes und vernetztes Fahren) 에서자율주행자동차의잠재력을높이평가하면서자율주행자동차의상용화에대비한활동영역과조치들을 1 기반시설 ( 자율주행자동차의실시간정보공유를가능하게하기위한도로상의기반시설확충 ), 2 법령개선 ( 운전자가시스템을지속적으로모니터링하지않아도자율주행자동차가스스로주행임무를수행할수있도록규제체계마련 ), 3 혁신 ( 바이에른주의 A9 고속도로를자율주행자동차시험운행구간으로마련하고, 연구를장려함 ), 4 네트워크화 ( 자율주행자동차의운행에필요한상세한정보구축 ), 5 IT보안과정보보호 ( 해킹방지를위한자동차관련 IT보안의표준화및자율주행자동차의이용자정보보호 ) 등 5개로제시하고있다. 독일에서자동차와도로교통에관한법령은다양하다. 도로교통법 (Straßenverkehrsgesetz: StVG), 자동차허가명령 (Fahrzeugzulassungsverordnung: FZV), 운전면허명령 (Fahrerlaubnis-Verordnung: FeV), 자동차부품명령 (Fahrzeugteileverordnung: FzTV), 도로교통규칙 (Straßenverkehrsordnung: StVO), 도로교통허가규칙 (Straßenverkehrszulassungsordnung: StVZO) 등이있다. 이들법령은대부분독일이비준한 도로교통에관한비엔나협약 을국내에서이행하는내용을담고있다. 독일에 48

59 서는미국과같이자율주행자동차에관한특별규정을두고있는법령은없다. 다만, 뒤에서 언급하는것처럼 도로교통에관한비엔나협약법률 의개정안이연방의회에제출되어 있다. 2. 자율주행자동차기술개발현황독일의자율주행자동차관련기술개발은, 유럽연합 (EU) 측면에서진행되는부분과독일자체적으로추진되는내용으로구분지어추진할수있다. 즉, 초기유럽의자율주행자동차는도쿄의정서에따른 Co2 배출감소를목적으로연구가시작되었고, EU주도의연구와각 EU참여국가의개별연구로구분할수있다. 먼저, 유럽연합은소속된국가별로다양한자율주행자동차육성정책을추진하고있지만, 아래와같이, 2015 년발간된 2건의보고서 (EPoSS 41), ERTRAC 42) ) 에서현재기술수준과사회제도적측면에서고려한기술개발로드맵을확인할수있다. < 유럽 EPoSS( 출처 :EPoSS 보고서 )> 자율주행기술레벨정의ㅇ자율주행 Level 은총 6단계인 SAE 기준을사용하고있으며, Level 0, 1, 2는현재상용화중인것으로보고있음. 즉, 현재출시되고있는 ADAS 및통합 ADAS 는자율주행 Level 1~2로정의하고있으며아직일반적인주행조건에서완벽한수준의 Level 3 이상의시스템이상용화된사례는없음 기술개발단계정의ㅇ EPoSS 보고서에서는자율주행기술개발단계를 R&D DEMO Production/Industry 로정의하고있으며, ERTRAC 보고서는 DEMO 와상용화사이에규제및표준화단계를추가함. 연구시작부터상용화까지는약 10년의시간이필요하다고명시함 41) EPoSS: European Technology Platform on Smart System Integration 42) ERTRAC : European Road Transport Research Advisory Counsil 49
 *HKMC 는 15.")
 의공식홈페이지등을면밀히검토한결과대부분 R&D- 데모 단계에있으며, 구체적인상용화계획은극소수임 * 아우디, 폭스바켄등은데모카개발 (R&D), 기술시연 (Demo) 을하고있으나, 상용화 (Production& Market) 출시계획에대한언급은자제 기술개발로드맵ㅇ EPoSS 에서는자율주행로드맵을 Level 3의마일스톤으로정의하고이를 R&D- 데모-")
60 자율주행기술개발단계 (EPoSS) 자율주행기술개발단계 (ERTRAC) ㅇ선진업체의경우브랜드홍보효과등을이유로상용화출시시기를과장하여표현하거나, 일부언론에의해 R&D- 데모-상용화 단계를구분하지않고단순연구 / 데모수준을상용화로표현하는기사다수존재 - 현재출시혹은 1~2 년내출시예정인자율주행차량은 ADAS 기능을통합한 hands-on 상태의 Level 2초기수준제품임 ( 법 / 제도개선불필요 ) *HKMC 는 월 ADAD 의확장개념인 HDA(HighwayDrivingAssistance) 출시했음 -일부경쟁력이취약한 OEM 및연구소등에서자율주행상용화계획을공격적으로발표하는사례가있으나, 이는과거사례와객관적이고현실적인 ( 상용화 ) 관점에서재검토가필요함 *GM SuperCruise(Level 2) 의경우 14 년 17 년으로양산계획정정 -해외선진업체 (OEM 및 Tier1) 의공식홈페이지등을면밀히검토한결과대부분 R&D- 데모 단계에있으며, 구체적인상용화계획은극소수임 * 아우디, 폭스바켄등은데모카개발 (R&D), 기술시연 (Demo) 을하고있으나, 상용화 (Production& Market) 출시계획에대한언급은자제 기술개발로드맵ㅇ EPoSS 에서는자율주행로드맵을 Level 3의마일스톤으로정의하고이를 R&D- 데모- 양산 Level 3 과정을통해개발한다고예측함. 또한국가마다도로체계 ( 자동차전용도로, 하이웨이등 ) 및관련법이상이하므로해당지역의도로환경, 법 / 제도에따라유연하게대응해야함을명시함. 아래그림에서명시된년도는 양산 년도로 Highway Autopilot 을 2025년에도심자율주행은 2030년에상용화를목표로함 50
 highway chauffeur higher AD highway autopilot A B 구간자율주행 운전자자유도제공 동물충돌회피철길건널목주행 highly AD (driverless 지향기술혁명 ) 지역 / 도시별자율주행기술요구사양상이 ㅇ ERTRAC 보고서는일반승용차,")
61 유럽 (EPoSS 발간 ) 마일스톤대상도로교통상황인식대상 Milestone 1 (2020) Milestone 1 (2022) Milestone 2 (2025) Milestone 3 (2030) 주차장자동차전용도로 (motorway) 자동차전용도로 (motorway) 도심 (city) 저속덜복잡한주행환경 중고속 복잡한교통환경 - - 동물 교통신호보행자이륜차 기술명및자율주행시나리오 traffic jam chauffeur ( 차선변경포함 ) highway chauffeur higher AD highway autopilot A B 구간자율주행 운전자자유도제공 동물충돌회피철길건널목주행 highly AD (driverless 지향기술혁명 ) 지역 / 도시별자율주행기술요구사양상이 ㅇ ERTRAC 보고서는일반승용차, 상용차등을대상으로총 Level 4의기술개발과정 ( Research Demo Regulation/Standards Industrialization ) 으로자율주행기술개발마일스톤을정의함. 특히, 상용차의경우 19년 Cooperative ACC(Adaptive Cruise Control) 를시작으로군집주행기술개발을목표로하고있음ㅇ또한, 최고속도를구체적으로명시하고있으며, 완전자율주행의경우 30년을목표로하고있으나, 대략적인추정치임을명시함 51
62 Passenger Cars 유럽 (ERTRAC 발간 ) Commercial Vehicle Park Assistance (Lv.2) Traffic Jam Assistance (Lv.2) : 30KPH 이하의차선유지, Stop&Go 교통체증운전지원 Traffic Jam Chauffeur (Lv.3) : 자동차전용도로에서 60KPH 까지교통체증운전지원. 차선변경기능포함 Truck - C-ACC Platooning : 운전자가모든기능에책임을지는협조형차간거리제어 2020 Parking Garage Pilot (Lv.4) : driverless valet parking Truck Terminal Parking Highway Chauffeur (Lv.3, 130KPH) Highway Chauffeur (Lv.3, 90KPH) : 자동차전용도로에서진출입로, 추월자동주행. 시스템한계도달시운전자에게수동운전요청 Truck Platooning : V2V 기반의군집주행 Highway pilot with ad-hoc platooning (Lv.4, Highway pilot (Lv.4, 130KPH) 110KPH) 자동차전용도로에서진출입로, 추월, 차선변경자동주행. 일반조건에서는수동운전요청없음. V2V 연계 Fully automated private vehicle (Lv.5) Fully automated Trucks (Lv.5) : 운전자는목적지만입력. 완전자동주행. 30 년은대략적인목표 ( 추정 ) 도전기술및주요이슈ㅇ EPoSS 의경우도심및복잡한교통상황에서의자율주행을위해서는 Vehicle-VRU(Vulnerable Road Users) Communication, Intention recognition external traffic members, Traffic scene interpretation 기술등을 30년에상용화해야한다고명시함 ㅇ이러한기술들은현재로서는구현이힘들거나초기연구단계로서향후인공지능과관 련된기술임 52
 자율주행자동차에대한운전자의요구사항충족과도로사용자들 (Road User) 이자율주행자동차를신뢰하고교통체계의일원으로받아들일수있는방법 - ( 운전자의주의와개입 ) 자율주행레벨에따라운전자의주의와개입정도를정의할수있는요구사양정립 - ( 검증및평가요구사양 )")
63 ㅇ ERTRAC 은자율주행자동차의상용화를위해다음과같은도전기술과주요이슈들을열거하고지속적인연구가필요하다고언급함 - ( 주행환경인식 ) 서로다른타입의센서를융합하여주행환경을인식하는기술 - ( 기술신뢰성확보를위한실증 ) 다양한주행조건 ( 날씨, 교통, 도로조건등 ) 에따른자율주행기술의신뢰성, 안전성, 강건성을검증하기위한대규모실증 - ( 법 / 규제 ) 자율주행자동차와관련된법 / 제도및보험관련제도확립 - ( 소비자 / 사회적수용성 ) 자율주행자동차에대한운전자의요구사항충족과도로사용자들 (Road User) 이자율주행자동차를신뢰하고교통체계의일원으로받아들일수있는방법 - ( 운전자의주의와개입 ) 자율주행레벨에따라운전자의주의와개입정도를정의할수있는요구사양정립 - ( 검증및평가요구사양 ) 자율주행기능에대한적절한검증과평가요구사양을확립하여성능지수의주안점을정의하고, 고효율의평가방법확립 - ( 인프라요구사양 ) 자율주행기능의고도화를위한도로시설 ( 인프라 ) 의역할및요구사양정의 - ( 상용화 ) 자율주행자동차관련시스템, 부품등을생산하기위한요구사항과대량생산을위한진입장벽이무엇이있는지검토필요 유럽의자율주행자동차관련기술은공공기관에의해주도되고있는데, 이는단순히역내교통시스템향상을위한기술개발만이아닌양산화를통한수출가능성까지고려된 R&D를수행하고있다는것에미국과차별화를둘수있다. 또한, 개발주도기관에따라다양한교통이혼합된상황하에서의제한적인자율주행기술과전용차선에서의완전자율주행기술로구분할수있다. EU주도의자율주행자동차기술개발은 EC산하의 DG-CONNECT, 43) DG-RTD 44) 에의해서대형프로젝트위주로진행되고있는데, DG-CONNECT 에서는자동차산업과깊게관련되는대형프로젝트로서 HAVEit, 45) SMART-64 를진행하고있고, DG-RTD 에서는 CityMobil, SARTRE(Safety 43) DG-CONNECT : Directorates General-Communications, Networks, Contents and Technology 44) DG-RTD : Directorates General ー Research and Innovation 45) HAVEit : Highly Automated Vehicle for Intelligent Transport 53

 FCWS 48) ) 적용모드, ACC 49) 적용반자율주행모드, ACC 및 LKAS 50) 적용반자율주행모드의 4가지로구분해서적용했다.")
64 Road Trains for the Environment) 와같은도심이동수단및트럭과같이안정성확보를위한일반교통체계와어떻게분리해야하는지에관한연구를진행하고있다. EU는과거 1987 년부터 1995 년까지 749백만유로를투자한 PROMETHEUS 46) 프로젝트를통해자율주행자동차개발을지원한경험이있다. 이는 1980년대자율주행자동차의개척자인뮌헨대학의 Ernst Dickmanns 교수에의해시작되었고다임러벤츠와공동연구를통해 VaMP와 VITA-2 를개발하여파리에서다중차선의고속도로를수천km 를최고시속 130km/h 로주행했으며, 일반차선에서군집주행과다른자율주행자동차와좌우차선변경등을수행했다. < 그림 4>PROMETHEUS 프로젝트로개발된시험차량 (VaMP,VITA-2) DG-CONNECT 에서추진된 HAVEit(2008~2011, 2750 만유로 ) 프로젝트는완전자율주행자동차가아니라부분적인자율주행자동차개발과운전자및차량과의상호작용을연구하기위한프로젝트로서다른프로젝트와달리 HMI 및자율주행자동차의단계별운전자의수용성연구를시도했다. HAVEit 프로젝트에서는 V2X 통신기술은적용되지않고차량에장착된차량의센서정보를기반으로구현되었는데운전자수용성연구를위해서부분자율주행자동차기술을운전자완전주행모드, 경고시스템 (LDWS, 47) FCWS 48) ) 적용모드, ACC 49) 적용반자율주행모드, ACC 및 LKAS 50) 적용반자율주행모드의 4가지로구분해서적용했다. 이는, 자율주행자동차주행시차량제어의책임여부를판단하기위해운전자와자율주행자동차의연계시스템에관한연구를수행했는데, 폭스바겐의 Auto Pilot 시스템의경우종횡방향자율주행기술을적용한 46) PROMETHEUS : PROgram for a European Traffic of Highest Efficient and Unprecedented Safety 47) LDWS : Lane Departure Warning System 48) FCWS : Forward Collision Warning System 49) ACC : Adaptive Cruise Control 50) LKAS : Lane Keep Assistance System 54
 는 30km/h 이하의교통혼잡지역에서선행차량과의거리를유지하는플래툰시스템을개발하였고, Continental 에서는차량의좌우의차량유무를감지하기위해레이저스캐너를적용하여승용차량에 Automated Assistance in Roadworks and Congestion 시스템을장착해서차로진입,")
65 자율주행자동차에가장근접한기술로인정받고있으나, 주행시운전자의전방주시의무를간과하였으며많은연구기관에서자율주행자동차개발에있어서정책적으로극복해야할이슈로인식되고있다. 볼보트럭의 AQuA(Automated Queue Assistance) 는 30km/h 이하의교통혼잡지역에서선행차량과의거리를유지하는플래툰시스템을개발하였고, Continental 에서는차량의좌우의차량유무를감지하기위해레이저스캐너를적용하여승용차량에 Automated Assistance in Roadworks and Congestion 시스템을장착해서차로진입, 공사구간통과및교통혼잡구간에서시연했다. < 그림 5>Continental 의운전자모니터링시스템 그외, 유럽의 C-ITS 프로젝트는 CVIS(Cooperative Vehicle-Infrastructure Systems), SAFESPOT, COOPERS 등을바탕으로 COMeSafety 로통합, Drive C2X에서현장검증을수행하였는데, 2009년까지 CVIS는핵심기술, SAFESPOT 은안전, COOPERS 는도로운영적차원에초점을두고개발했다. < 표 8> SAFESPOT, COOPERS, CVIS 연구개요 구분 CVIS SAFESPOT COOPERS 기간 주체기관 ERTICO Fiat Research Centre Austria Tech 목표 협력시스템을 위한 요소 안전을목적으로차대차중심 도로정보제공을중심으로한 55
, 확장성 (scalability), 안전성 (security), 상호운영성 (interoperability) 등의평가,")
66 내용 기술개발노차간, 차대차간의멀티채널통신과플랫폼, 고정도위치표정, 로컬동적지도등개발 의협력시스템어플리케이션개발주행상황과주위환경을실시간으로인식하고운전자에게적정한조작을행하도록지적차량과새로운협력어플리케이션개발 V2I 통신시스템어플리케이션개발안전과교통관리, 과금을위한교통상황, 인프라상황을실시간으로 V2I 통신시스템개발 2011년 8월부터 2014년 2월까지진행된 SAFETY PILOT 는 C-ITS 기반능동안전시스템의도입을목표로실제주행환경에서의차량간연계기술시험, 차량기반의안전시스템에대한운전자반응및대응분석, DSRC 기술의타당성 (feasibility), 확장성 (scalability), 안전성 (security), 상호운영성 (interoperability) 등의평가, 안전성향상을위한추가기능평가등을목적으로추진하는사업으로미국의 NHTSA 주도로 CAMP 협력을통해 2800대이상의차량을이용하여 V2V V2I 통신기술, 어플리케이션, 시스템, 드라이버수용성, 사회수용성등을평가하는것과동시에보안, 기기인증등도함께평가했으며실제상황에서통신이연결된차량간의안전기능을설명하고, 의사결정에필요한중요한기술데이터를제공할수있다는측면에서매우중요한프로젝트였었다. < 그림 6>SAFETYPILOT 프로젝트에사용된시스템과차량 56

67 2011년 1월부터 2013년 12월까지진행된 Drive C2X 프로젝트는유럽의다양한장소에서다양한도로환경및차량에의해이루어진필드테스트를통하여협조시스템을각국의독자적프로젝트와지속적으로협력하여종합적으로평가하고, 실용화를위한과정의프로젝트로참가자는유럽자동차제조사 Audi, BMW 외, 공급업체 Continental, Delphi 등총 44개기관에서참여했으며, 총예산은 백만유로로독일, 이탈리아, 네덜란드, 스웨덴, 프랑스, 핀란드 6개국의테스트사이트에서실시되었다. < 그림 7>DriveC2X 테스트사이트 독일의경우프랑스보다더지방분권적이며연방정부에서지원하는규모보다주정부의지원금액이더큰것이특징으로유럽의자율주행자동차관련기술개발의주축을이룬다. 독일은프랑스와같이국가연구소가없지만, 연구와기술에강점을갖는대학들이존재하고벤츠, 폭스바겐, BMW와같은완성차와 Continental, Bosch 와같은첨단기술을보유한세계적부품업체를보유하고있으며, 독일개발기술부인 BMFT(BundesMinisterium für Forschung und Technologie) 가수년간연구를하고 EU 프로젝트와연계해서인프라에대한투자보다는자동차시스템에집중을하고있으며많은부품업체들로부터의투자를유도하고있다. BMBF 의첫프로젝트인 자동 SWIFT 에 800만유로지원을발표하였으며, 자동차완성업체 Audi 와부품업체 Bosch 그리고카를스루에컴퓨터과학연구센터등이참여했다. 또한, 연방고속도로연구센터인 BASt 가 Aktiv 프로젝트후속으로자율주행에관한연구를지원하고있으며, 독일연방경제기술부에의해트럭군집주행이교통흐름및연료소비와환경에미치는영향도 57

68 연구를위해 2005년부터 2009년까지 4백만유로를지원하여 KONVOI 프로젝트를수행했다. 이는, EU 지원의 CHAUFFEUR 프로젝트에서이미기술적인부분은개발이되었다는가정하에이미상용화되어있는기술을기반으로일반도로에서트럭의군집주행을수행했다. 독일교통부는자율주행자동차시범운행을위한첫번째케이스로뮌헨과베를린사이를연결하는아우토반일부구간에서자율주행자동차운행을승인하기도했다. 민간차원에서의기술개발은대부분벤츠, 아우디, BMW 등자동차제조사와콘티넨탈, 보쉬로대표되는자동차부품회사위주의기술개발이이뤄지고있다. 벤츠는벤츠는이미 2013년 S-class 차량으로만하임과포르츠하임구간 104km 무인주행에성공한기록을가지고있고자율주행자동차분야내첫양산차를생산하는기업이되고자하는목표를가지고, 당해연도 (2013 년 ) 부터 S-class 에 NHTSA 레벨2 의초기모델인 Distronic Plus with Steering Assist 를양산하고있으며, 스테레오카메라, 멀티레이더를기반으로주변환경을인식하며운전자의 hands-off 51) 가 10초이상지속시조향제어기능을해제할수있도록하고있다. 주요기술개발내용으로는연구용차량인 S500 Intelligent Drive 차량은전면부에 2개, 후면부에 1개의장거리레이더와 4개의단거리레이더및영상센서와의융합을통해서신호및주변상황을이식하고, 자동차의무인주행숙련을위한 3차원디지털카드를개발하고도로상황외에도방향과도로차선수및교통표지판, 신호등의위치등을포함하여 GPS 신호와융합한위치인식기술을개발하고있다. BMW는 2015년에 New 7Series 에무인원격주차를세계최초로상용화하였으며 2017년에는 5Series 에운전취약자 ( 고령자, 초보운전자, 장애인 ) 가차선을변경할의지가있을시에자동차스스로자동제어가가능한차선변경보조 (80KPH 이하 ) 및 Self-parking 을양산할계획이다. < 그림 8> 스마트키를이용한무인원격주차및자율주행지원 51) 운전자가핸들을잡고있지않는상태 58

69 아우디는 2015 년프로토타입자율주행시험차량이캘리포니아실리콘밸리부터라스베가스 까지약 900km 구간을실증자율주행에성공하였고, 2017 년에는도심교통체증상황 52) 에서 자율주행을추진할예정이다. < 그림 9>A7 파일럿드라이빙컨셉 3. 자율주행자동차관련입법현황가. 자율주행자동차시험운행의근거규정독일에서자율주행자동차의시험운행에관한근거규정은도로교통허가규칙제19조제6항이다. 이에의하면 형식에대한운행허가의보유자인차량제조사의차량에제2항에규정된부품을변경하는경우에는그차량이오로지시험을위하여사용되는한운행허가의효력이유지된다. 이경우허가한기관에신고할필요는없다. 제1문은허가기관이차량등록증에당해차량을시험용차량으로허가기관에신고했다는사실을기재한경우에만적용된다. 고규정하고있다. 이경우시스템은사람의조작이나차단이가능할수있어야한다. 53) 나. 비엔나도로교통협약개정안제출현행독일도로교통규칙 (Strassenverkehrsordnung: StVO) 에명시되어있는도로교통에관한규칙들은일차적으로차의운전자 (Fahrzeugeführer) 에초점을맞추고있다. 예컨대도로교통규칙제3조제1항에의하면차의운전자는차를항상지배하는범위에서만신속하게운행할수있다고규정하고있다. 또한도로교통규칙제9조제5항에따라서차의운전자는차의좌 우회전, 방향전환및후진에있어다른교통참가자에게위험을초래해서는안된다. 현행도로교통규칙의규정에비추어보면자율주행자동차에탑승한운전자가교통상황을 52) 자율주행시험차량주변에주행하는아우디차량들이주행시나리오를의도적으로만들어줌 53) Kleine Anfrage, Geplante Teststrecke für selbstfahrende Autos, BT-DRs. 18/3957 vom
70 모니터링하지않거나적어도부분적으로자율주행중에다른일을보고있었던경우에는그 운전자는도로교통규칙을위반한것으로평가할수밖에없다. 이점에서자율주행자동차는 현행도로교통규칙에부합하지않는것으로보인다. 한편, 도로교통규칙에명시되어있는많 은규정들은운전자의주의의무를규정하고있는것이아니라추상적으로차의이동에요구 되는규정들을두고있다. 예컨대도로교통규칙제 2 조제 1 항제 2 문에따라서차는도로의우 측으로주행해야하고도로교통규칙제 3 조제 2 항에따라서충분한근거가없는한교통의 흐름에지장을초래할정도로느리게주행해서는아니된다. 따라서이러한예들을보면도로 교통규칙은일차적으로차의이동에초점을맞추고있는것이지운전자의행위를통제하는 데초점을맞추고있는것이아니다. 54) 이러한이해에서출발해보면, 도로교통규칙의대부분 의규정들은자율주행기술이발전된상황에맞추어확대해석함으로써자율주행자동차의도 로교통을규율할수있을것이다. 그러나현행도로교통규칙이자율주행자동차와부합하지않는다고평가하는경우에도도 로교통규칙이자율주행기술발전에대응하여자율주행자동차의교통을어떻게규율해야할 것인지고민해보아야한다. 이에관해서는원칙적으로두가지모델을생각해볼수있다. 하나는도로교통규칙상의개별규정들을운전자의행위 ( 주의의무 ) 와연결시키는것이아니라 모두차그자체의이동에연결시키는방법이다. 이에관한예를들면, 도로교통규칙제 1 조 에자동화된조종이운전자에의한운전과동일하게평가되는경우에는운전자에대한행위 의요구수준을충족한것으로간주하는상응성조항을두는방법이다. 55) 다른하나는자율주 행자동차에대한독자적인규정을두어자율주행자동차에요구되는주의의무를열거하는방 식인데, 이것은복잡하기만할뿐큰의미가없는것으로평가된다. 56) 그러나독일의통설은 현행도로교통규칙의범위내에서자율주행자동차의도로교통과조화를이루고자하는모든 시도들이도로교통에관한비엔나협약에배치된다고이해한다. 57) 따라서자율주행자동차의 주행이가능하기위해서는독일도로교통규칙의상위규범인도로교통에관한비엔나협약이 개정되어야한다. 58) 독일은도로교통에관한비엔나협약에만비준하였을뿐제네바협약에는가입조차하지 않았다. 비엔나협약중자율주행자동차와관련한제 8 조와제 39 조가 2016 년 3 월에개정 시행 되자독일에서는이협약의개정내용을국내에서이행하기위하여 2016 년 6 월 28 일 1968 년 54) Lennart S. Lutz, Autonome Fahrzeuge als rechtliche Herausforderung, NJW 2015, 122 쪽. 55) Lennart S. Lutz, Rechtliche Hürden auf dem Weg zu autonomen Fahrzeugen( /41/41393/1.html: 최종방문일 : ) 56) Lennart S. Lutz, Autonome Fahrzeuge als rechtliche Herausforderung, NJW 2015, 122 쪽. 57) Eric Hilgendorf(Hrsg.), Robotik Im Kontext Von Recht Und Moral, Nomos, 1. Auf., 2014, 189 쪽이하 : Lennart S. Lutz, Anforderungen an Fahrerassistenzsysteme nach dem Wiener Übereinkommen über den Straßenverkehr, NZV 2014, 67 쪽. 58) 비엔나협약의개정내용에관해서는앞의제 2 장제 3 절참조. 60
71 11월 8일자도로교통에관한협약제8조와제39조를개정하기위한법률안 59) 을연방의회에제출하여 2016년 9월현재법안이심의중에있다. 이법률안은비엔나협약상의개정조항인제8조제5항의 2와제39조제1항제3문을독일어로그대로번역하여옮기고있다. 독일의법률안이비엔나협약의개정내용을그대로번역하여옮긴이유는독일의고유한입법방식에근거하고있다. 즉, 독일에서는비엔나협약을국내에서비준할당시 1968 년 11월 8일자도로교통및도로교통표지협약에관한법률 60) 을제정하여이법률에비엔나협약상의규정내용을그대로번역하여옮기는방식을취하고있었기때문이다. 1968년 11월 8일자도로교통에관한협약제8조와제39조를개정하기위한법률안 의내용을그대로옮기면다음과같다. 1968년 11월 8일자도로교통에관한협약제8조와제39조를개정하기위한법률안 연방의회는다음의법률을결정하였다. 제1조국제연합유럽경제이사회 (UNECE) 의도로교통안전실무그룹 (WP.1) 이 2014 년 3월 24일부터 26일까지개최된제68차회의에서성안하였고국제연합사무총장의 2015년 10월 1일자서명으로통지된 1968년 11월 8일자도로교통에관한협약 (BGBL II S. 809, 811) 제8조및제39조의개정에동의한다. 개정내용은아래에서공식적인독일어번역본으로공표한다. (1) 이법은공포한다음날에발효된다. 제 2 조 (2) 협약의개정내용은독일연방공화국에서 2016 년 3 월 23 일에발효된다. <1968 년 11월 8일자도로교통에관한협약제8조와제39조의개정 > 제8조의개정제5항다음에아래와같은내용의제5항의 2를삽입한다. 제5항의 2 차량의운행에영향을주는차량시스템이차륜차량, 차량장치및차륜차량에장착하거나사용할수있는부품과관련하여국제적법기준에따른설계, 장착및이용을 59) Gesetzentwurf der Bundesregierung, Entwurf eines Gesetzes zur Änderung der Artikel 8 und 39 des Übereinkommens vom 8. November 1968 über den Straßenverkehr, BT-Drs. 18/ ) BGB II, 1977/39. 61
72 위한조건에부합하는경우에는본조제5항및제13 조제1항에부합하는것으로본다. 차량의운행에영향을주는차량시스템이앞에서언급한국제적법기준에따른설계, 장착및이용을위한조건에부합하지않지만당해차량시스템이운전자에의해제어또는차단될수있는경우에는본조제5항및제13조제1항에부합하는것으로본다. 제39조의개정 (1) 국제적교통에서모든동력차량 ( 본협약제1조 p호 ), 모든트레일러및그와연결된모든차량은부록 5에기재된요건에부합해야한다. 또한이러한차량들은운행의안전을확보하고있어야한다. 의문언에이어다음의문언을삽입한다 : 이러한차량에제8조제5항의2에기재된국제적법기준에따른조립, 장착및사용을위한요건에부합하는시스템, 부품및차량장치가장착되어있는경우에는이러한시스템, 부품및차량장치는부록 5에합치되는것으로본다. 그러나독일에서 1968 년 11월 8일자도로교통에관한협약제8조와제39 조를개정하기위한법률안 이연방의회에서통과하여시행되는경우에도애초의비엔나협약의개정사항이자율주행기술에관한 3단계 ( 즉, 자율주행모드와운전자모드의병존단계 ) 를전제로하고있기때문에사람인운전자는여전히차의운행에관한책임을부담하고언제든지차에대한통제를할수있어야한다. 따라서구글카와같이운전대와엑셀레이트가없는차는독일에서비엔나협약을국내에이행한경우에도별도의입법이없는한독일내에서의주행이허용되지아니한다. 다. 자율주행버스의운행독일에서는 2015년부터프랑스의버스생산업체인 Navya 사가생산한미니버스를 Chemnitz, Oberhausen, Bad Zwischenahn, Dangast 및 Leipzig 등 5개시에서시험운행하고있다. 이미니버스의명칭은 Arma 라한다. 이미니버스는순수하게전기로주행하는자율주행차량으로서사람의수송에이용되고있다. 컴퓨터로조종되고운전자가없는 Arma 는승객을 15명까지수송할수있고시속 45킬로미터까지주행할수있다. Arma 에서는컴퓨터기술이버스운전수를대신한다. 미리프로그래밍된구간에서 GPS, 레이더및센서가 Arma 를조종한다. Arma 는 11개의좌석과 4개의입석을갖추고있으며천천히주행하고보행자가지나갈경우에는스스로정지하거나필요한경우에는장애물을비켜간다. 배터리가 10% 미만으로만남은경우에는 Arma 가스스로충전소로조종해가는특징이있다. 62

73 < 그림 10>Chemnitz 시에서실제주행중인자율주행버스 Arma 그러나현시점에서자율주행버스인 Arma 는독일의공공도로에서주행할수없다. 독일에 서자율주행버스는병원, 공항, 대규모회사등의내부도로 ( 즉, 사적인공간 ) 에서셔틀버스로 만이용되고있을뿐이다. Arma 에대하여지금까지운행허가가되지않고있기때문이다. 라. 스위스의공공도로에서자율주행버스의운행독일과같이독일어권국가중의하나인스위스에서도자율주행버스가운행되고있다. 우선, 스위스연방환경 교통 에너지 통신부는 2015 년 4월스위스정보통신그룹인 Swisscom 에대하여공공도로에서자율주행자동차의시험주행을위한예외적승인을발하였다. 자율주행차시험주행을위한예외적승인의근거규정은도로교통법제106 조제5항이다. 이에따르면, 도로교통분야에서새로운기술적발현형식이등장하는경우및국가간의협약을시행하기위한경우연방정부는법적으로규율하기까지필요한것으로판단되는잠정적조치를취할수있다 고명시하고있다. 이규정에따라연방환경 교통 에너지 통신부는자율주행자동차의시험주행을위한예외적승인을발한것이다. 이로써 Swisscom 이공개한자율주행자동차파일럿프로젝트가처음으로개시되었다. 스위스연방정부가자율주행자동차의시험주행을위한예외적승인을한이유는스위스도로교통법상운전자는운전대를놓으면안되기때문이다. 연방환경 교통 에너지 통신부의예외적승인에는자율주행자동차의시험주행과관련하여어떠한규정이적용되지않을수있으며, 어떠한보완조치로써안전을담보할수있는지등이포함되었다. 즉, 연방환경 교통 에너지 통신부의예외적승인은다양한조건들과결부시키고있다. 우선, 지정된구간에서만자율주행이허용되고, 지정된구간이외에는칸톤의관할행정기관또는국도의경우에는연방도로교통청 (Bundesamt für Verkehr: BAV) 의승인을받아야한다. 또한시험차량에는항상특별하게훈련받은운전자 2명이탑승하여문제가발생할경우즉시개입할수있어야한다. 또한자율주행자동차의시험주행을위해서는스위스연방환경 교통 에너지 통신부의예외적승인이외에연방통신청 (Bundesamt für Kommunikation: BAKOM) 의예외적승인도필요했다. 시험주행에이용되는차량에대한무선통신허가가되지않았기때문이다. 나아가아래에서 63
 에서승객의운송에투입된자율주행버스는스위스운수회사인 PostAuto 사가운영하는운전자없는셔틀버스이다. Wallis 칸톤의도로교통관할관청은 Wallis 칸톤수도내의특정구역에서시험운행을위한허가를해주었다. 시험운행을위한예외적허가의유효기간은 2017 년가을까지이다.")
74 언급하는것과같이 Sitten 시에서시험운행중인자율주행버스에대해서는사람의운송에대한연방도로교통청의예외적승인도받아야한다. 한편, 스위스에서도독일에서와같이프랑스의버스생산업체인 Navya 사가생산한미니버스가실제로주행되고있다. 그러나독일과는달리스위스에서주행되고있는자율주행 ( 미니 ) 버스는공공도로에서실제로승객들을운송하는데활용되고있다 년 6월부터스위스 Sitten 시 ( 프랑스명 : Sion시 ) 에서승객의운송에투입된자율주행버스는스위스운수회사인 PostAuto 사가운영하는운전자없는셔틀버스이다. Wallis 칸톤의도로교통관할관청은 Wallis 칸톤수도내의특정구역에서시험운행을위한허가를해주었다. 시험운행을위한예외적허가의유효기간은 2017 년가을까지이다. 자율주행버스는 11개의좌석을갖추고있고현재최대시속 20킬로미터로운행되고있다. 이자율주행버스는전기로작동하는차로서이미 2015 년말에일반에소개되어공공도로가아닌장소에서수개월간시험주행이진행된바있다. 그러나현재스위스에서도독일과같이공공도로에서자율주행버스를운행함에대한법규정이완비되지않고있어서 Sitten 시에서자율주행버스를장기간의시험주행을하기위해서는여러가지의특별허가를받아야했다. 따라서 Sitten 시에서운행되고있는전기자율주행버스는연방도로교통청과 Wallis 칸톤의도로교통청으로부터모두허가를받아운행되고있다. 자율주행버스가시험운행중인때에는항상 1명의전문가가동반해야한다. 이전문가로하여금언제든지자율주행버스를정지시킬수있게함으로써승객의안전도확보하고있다. < 그림 11>Siten 시 ( 프랑스명칭 Sion 시 ) 에서실제주행중인자율주행버스 64
75 제 3 절일본 1. 개관일본에서는자율주행과관련하여 자동주행 이라는용어를사용하고있다. 일본정부는자율주행이자동차교통의미래에관련된중요한문제라는점을인식하여적극적으로대처하고있다. 이미 2013년에각의결정을통하여 세계최첨단 IT 국가창조선언 을내놓았는데, 이선언중자율주행자동차와관련된부분으로는차의자율계시스템과차와차, 도로와차와의정보교환등을조합하여 2020년중반에는자율주행시스템의시용을개시한다는국가목표를제시했다. 또한 2016년 5월 20일고도정보통신네트워크사회추진전략본부가 민관 ITS 구상 로드맵 2016~2020 년까지의고속도로의자동주행및한정지역의무인주행이동서비스의실현을향하여 를발표하였고, 이에 2016년 6월 23일내각부정책총괄 ( 과학기술 이노베이션담당 ) 이 전략적이노베이션창조프로그램 (SIP) 자동주행시스템연구개발계획을공표하였다. 61) 그러나일본정부가자율주행자동차를상용화하기위한기술발전과정책전개에관하여노력을기울이고있는것과는달리자율주행자동차와관련한법제적개선에관한논의는더디게진행되고있다. 이는지금까지자율주행자동차와관련한도로교통법등이개정되지않았을뿐만아니라개정안자체도나오지않고있다는점에서유추해볼수있다. 그배경에는일본의도로교통법의상위규범인도로교통에관한제네바협약이개정되어있지않기때문인것으로보인다. 다만, 일본경찰청은 2015년에자동주행의제도적과제등에관한조사검토위원회를설치했고, 자율주행자동차의도입과관련한제도적과제를설정하기위하여 일본능률협회총합연구소 에연구용역을발주하였고, 일본능률협회총합연구소는 2016년 3월에 자동주행의제도적과제등에관한조사연구보고서 를제출하였다. 이점에서본절에서는일본능률협회총합연구소가일본경찰청에제출한 자동주행의제도적과제등에관한조사연구보고서 를중심으로일본에서의자율주행자동차관련과제들을검토해보고자한다. 2. 자율주행자동차기술개발현황일본의자율주행자동차개별기술개발프로젝트를살펴보기에앞서, 2013년내각회의에서발표되었던 세계최첨단 IT 국가창조선언 에따라 2018년을목표로교통사고사망자수를 2500명이하, 2020년까지세계에서가장안전한도로교통사회를실현을위해 SIP 62) -자율주행시스템 프로그램과산관학위원으로구성된 자동주행비즈니스검토회 를통한자율 61) 川本哲郞, 自動運轉と刑事法, 한국법학회개최, 2016 년도한 일추계국제학술대회, 자율주행자동차상용화에따른법적제문제, , 79 쪽. 62) Strategic Innovation Promotion Program, 전략적혁신창조프로그램 65
76 주행기술경쟁력강화를위한선결과제발표 (2015 년 6월 ) 를중심으로아래와같이추진되고있다. SIP프로그램은자동차의자율계 ( 自律系 ) 시스템에차차간, 노차간의정보교환등을조합하여 2020년대에는자율주행 (= 자율주행 ) 시스템의試用 ( 시험삼아서사용해봄 ) 을개시할예정이며, 자동주행비즈니스검토회는도요타, 혼다등자동차제조기업과히타치제작소등부품기업이전략적협력을통한기술과부품을공동개발로첨단기술개발및인재육성에기여하며일본자율주행기준의국제화도추진중이다. 일본 SIP- 자율주행시스템 < 배경 국내외상황 > 자율주행시스템에는 1 교통사고의저감 2 교통정체의완화 3 환경부하의저감 4 고령자등의이동지원 5 운전쾌적성의향상과같은효과가기대되며국내외에서관심이급속히높아지고있다. 유럽에서는 2013 년종료된 FP7( 제 7차 Framework Programme) 의연구개발지원과함께 Horizon2020 에서자율주행시스템의연구개발이결정되어있다. 또한미국에서는미시건주에서협조형운전지원시스템에대한 3000대규모의실증실험의성과를바탕으로미국연방운수성 (USDOT) 에서자율주행시스템의검토에착수했다. 이와같이유럽 미국에서는관민이연계하여자율주행시스템의개발과보급을위해환경정비의검토가진행되고있으며, 개발경쟁의양상을보인다고할수있다. 또한일본에서교통사고의현상은지금까지국가, 지방공공단체, 관련민간단체및국민들의오랜노력의성과로교통사고사망자는감소해왔지만최근감소율은둔화되고있음. 그래서 2013년 6월에내각회의에서발표되었던 세계최첨단 IT 국가창조선언 : 2018년을목표로교통사고사망자수를 2500명이하로, 2020년에는세계에서가장안전한도로교통사회를실현함과함께교통정체를대폭줄인다. 라는국가목표의실현은상당히힘들것으로보인다. 특히, 교차로사고와보행자사고, 자동차 이륜차사고는큰과제이며, 자동차뿐만아니라교통환경의개선과사람의계발등을포함한종합적인접근이필요하다. 한편자동차의주행기능은인지, 판단, 조작의 3요소로구성된다. 자동차에설치한레이다등을통해서주행로의환경을인식하는기술 ( 자율형시스템 ) 과자동차외부에서통신을이용하여주행로환경을인식하는기술 ( 협조형시스템 ) 이있다. 자율주행시스템의실현에는이 2가 66
77 지가통합되어시너지효과를극대화할필요가있다. 교통사고사망자수를저감시키기 위해서는자율형시스템만으로는앞에서말한과제의해결이어려우며협조형시스템 을보완해나갈필요가있다. < 의의 정책적인필요성 > 2013년 6월에내각회의에서결정되었던 세계최첨단 IT 국가창조선언 에서자동차의자율계시스템과차차간, 노차간정보교환등을조합하여운전지원기술의고도화를계획하면서실용화를위해공도로상에서의실증을실시하여 2020년대중에는자율주행시스템의試用을개시하고이를통해상술한국가목표를실현하고자한다. 일본은과거 20년이상세계최첨단의 ITS 시스템을개발 도입해왔고현재도최대의수출산업으로자동차산업을보유하고있다. 유럽 미국의각국이국가정책으로자율주행시스템의연구개발을추진하는상황에서일본은이보다앞서자율주행시스템의개발 실용화및보급을추진하여국가목표를달성하고세계제일의도로교통사회를실현함으로써국민이향유하는가치는사회적으로도산업적으로도크다고할수있다. 한편 ITS 및자율주행시스템분야는관련부처도많고기술뿐만아니라사회수요, 법제도분야까지포함한다방면의검토가필요하고부처및관민이연계해서개발을진행해나가야한다. 또한, 글로벌상품인자동차에있어서국제표준화도중요하며현장주의에기반한실증실험에의한효과분석을최대화하고국제연계및시민이해 찬성을얻어가는것도 SIP 업무로중요하다. < 목표 목적 > 1 사회적목표교통사고사망자저감 (2500 명이하 / 년 ), 교통정체의완화등국가목표를달성한다. 달성시기에대해서는앞으로로드맵의입안및안전시책의교통사고사망자감소효과의예측을가능하게하는기술개발에따라명확히하며 PDCA 사이클을반복해나간다. 2 기술적목표 2017년까지는신호정보와정체정보등의인프라정보를활용한準자율주행시스템 (Level 2) 을시장화한다. 나아가서 2020년대전반을목표로準자율주행시스템 (Level 3) 를시장화하고 2020년대후반이후에는완전자율주행시스템의시장화 63) 를목표로한다. 또한일본의발전에기여하기위해 2020년동경올림픽 패럴림픽에서는동경을대상으로準자율주행시스템 (Level 3) 을먼저실용화한다. 국제적으로열려왔던연구개발환경을정비하고세계적규모의과제해결을위한새로운국제연계체제를확립한다. 3 산업면의목표 67
78 ⅰ) 산업창출 자율주행시스템관련신산업은시장이넓다. 자동차통신기, 노변통신기, 휴대통신기등정보통신기기의시장을중심으로폭넓은시장확대를기대할수있다. 또한자율주행시스템의실용화에따라서다이나믹맵 64) 기반기술과프로브정보등의신기술이진화하고이들정보의정비 / 운용 / 활용서비스라는새로운산업을창출한다. 더욱이이와같은 IT ITS 기술과경쟁영역이고도화된자동차주행기술이조합된다면 기계가사람과합쳐져서지원하는 새로운가치를얻어낼수있다. 나아가차세대공공교통시스템과교통제약자 보행이동지원시스템등의기술과지역의교통매니지먼트서비스와인프라를패키지화한수출비즈니스를창출할수있다. ⅱ) 글로벌쉐어국제연계를구축하여자율주행시스템에관한표준화를리드하고협조형시스템에있어서는선도적인우위성을살려서세계최고주자의지위를확립한다. 이들에대한구체적인수치목표에대해서는 IT종합전략본부신전략추진전문조사회도로교통분과회와연계하여 2014년도에검토를진행한다. < 출구전략 > 1. 교통사고사망자저감등국가목표달성자동차 사람 인프라삼위일체의교통사고대책을실행하는기술기반과실행체제를구축하고 관민 ITS 구상 로드맵 에기재된국가목표를달성한다. 운전지원시스템및자율주행시스템의개발및실용화 보급촉진을실시하는동시에교통사고사망자의데이터해석과시뮬레이션기술을진화시켜서안전시책의효과예측과검증을가능하게하는기술을개발한다. 또한복수의관계자를통합하는실행체제의검토를통해서국가목표의달성을위한진척 관리하는구조를구축한다. 2. 자율주행시스템의실현과보급 2017년까지신호정보와정체정보등의인프라정보를활용한準자율주행시스템 (Level 2) 을시장화한다. 나아가서 2020년대전반을목표로準자율주행시스템 (Level 3) 을시장화하고 2020년후반이후에는완전자율주행시스템의시장화 65) 를목표로한다. 3. 동경올림픽 패럴림픽을이정표로서비약 2020년동경올림픽 패럴림픽에서는동경의발전과고령화사회를맞는일본의다음세대에도움이될차세대교통시스템과초접근성 (accessibility, 교통제약자대책 ) 의개선과보급에노력한다. < 연구개발의내용 > 상기목표 출구전략을뒷받침하는데에필수적인개발테마를아래에정리하였다. 현 68

79 재필요하다고생각되는연구개발과시책테마 32건에대해투자요청또는준비완료의프로젝트테마는 29건, 종래의요청을포함하여계속해서의논해나갈테마가 3건이다. SIP 예산을이용하여실시하는프로젝트테마의선정은, 내각부가주도했지만개별연구개발테마의실시에있어서는관련시책의실시상황등에따라가장효과적이고효율적인실시의관점에서경찰청, 총무성, 경제산업성, 국토교통성과의사이에서적절한역할분담을검토했다. 연구개발테마는자동차산업스스로가중심이되어실시하는자동차의자율형시스템등의경쟁영역에대하여대응하고 SIP에서는관민연계실시가더필요한기반기술및협조영역 ( 협조형시스템관련 ) 에대해서개발 실용화를주로추진한다. 연구개발테마의분류를도표3 Ⅲ 에나타내고 SIP에서는점선에표시한테마를실시한다. I. 자율주행시스템의개발 실증지금까지정부에서검토되었던자율주행시스템은주로자동차전용도로에서의지원이중심이었다. 이는영역을한정함에따라기술적인허들을낮추기보다조기에실현하기위함이지만교통사고사망자저감의국가목표달성을생각할때일반도로도대상이되어야할필요가있다. SIP에서는도표4 Ⅳ 에나타낸것과같이지금까지의활동을살리면서자동차전용도로, 일반도로에서매끄럽게운전지원을할수있도록개발을진행해나간다. 69
 교통규제등의교통관리정보 (2) 자동차와보행자등의교통상황정보 (3) 주변구조물등의주행로의환경정보 (4) 상세한도로관리정보 (5) 정보의어셈블리와구조화 (6) 위성측위활용을위한기초평가 2014년도는다이나믹맵구축을위한아키텍처를검토하면서도로관리정보, 교통관리정보, 교통상황정보, 주행로환경정보의취득방법의개발과시험을실시한다.")
80 1 지도정보고도화 ( 다이나믹맵 ) 의개발자율주행시스템을실현하기위해서필요한이하의 6가지의통합된지도데이터베이스 ( 글로벌다이나믹맵 ) 을개발, 실용화한다. (1) 교통규제등의교통관리정보 (2) 자동차와보행자등의교통상황정보 (3) 주변구조물등의주행로의환경정보 (4) 상세한도로관리정보 (5) 정보의어셈블리와구조화 (6) 위성측위활용을위한기초평가 2014년도는다이나믹맵구축을위한아키텍처를검토하면서도로관리정보, 교통관리정보, 교통상황정보, 주행로환경정보의취득방법의개발과시험을실시한다. 2 ITS에의한선행정보의생성기술개발과실증실험자동차가스스로진로상의교통환경을적절하게파악하여필요한제어와지원을실현하기위해서 (1) 신호정보등으로대표되는동적인교통관리정보의취득 (2) 도로측센서와차차간통신등에의한고정밀도, 고신뢰성교통상황의취득 (3) 보행자통신단말을이용한보행자의움직임상황파악과보행자의이동지원실현 (4) 도로유효활용을위한안내정보취득등이필요하며위의 4가지모두에대해서개발 실증실험에착수한다. 3 센싱능력의향상기술개발과실증실험자율주행시스템의기술레벨은인지, 판단, 조작의 3요소와합류등의개별조정과정체완화등을최적으로실현하는도로시스템의통신및관제기능의고도화레벨이크게 70
81 좌우한다. 아래의 4테마를프로젝트화한다. (1) 자동차의환경인식센서성능고도화 (2) 고도의영상인식성능평가를위한영상인식시스템개발 실증 (3) 전천후차선식별기술 (4) 완전자율주행과전체를최적으로실현할수있는관제시스템 4 운전자모델의생성기술개발고령자등다양한특성을고려한운전행동데이터에기반한위험예측시뮬레이션기술구축과, 교통제약자의이동지원시스템개발을위하여 2014년도에는 (1) 교통제약자를포함한운전자의운전행동분석을통한운전자모델생성을실시한다. 5 시스템보안강화기술개발차차간, 노차간, 보행자와자동차간의통신등을이용한자동차와보행자 자전거의검지시스템의실용화를진행하는데외부에서의사이버공격등의보안상의위협을방지하기위해서 (1) 통신시스템의보안 (2) 자동차시스템의보안 (3) 자율주행시스템의안전성 신뢰성확보의개발에착수한다. II. 교통사고사망자저감 정체저감을위한기반기술정비 1 교통사고사망자저감예측수법의개발과국가공유데이터베이스구축교통사고사망자저감의국가목표달성을위해서는운전지원시스템의교통사고사망자저감효과를정확하게예측하는기술이필요하다. 2014년도는개발의우선도를정하기위해서아래의연구를실시한다. (1) 교통사고사망자저감효과예측수법의개발 2 마이크로 매크로데이터해석과시뮬레이션기술개발차세대통시스템을검토하는데에는기본시스템컨셉이검증가능한국가로서통일된교통환경시뮬레이션이필요하다. 2014년도는이시뮬레이션의검토에착수한다. (1) 마이크로 매크로연동시뮬레이션시스템의개발 3 지역교통 CO 2 배출량의가시화정체완화에따른환경부하저감효과를예측하기위해서 CO 2 배출량에의한지표화기술을개발한다. (1) 지역교통 CO 2 가시화기술의개발 III. 국제연계의구축 1 국제적으로열린연구개발환경의정비와국제표준화추진 71
82 자율주행자동차에관한기본적인이념의형성과국제표준화를진행하기위해서국제적으로열린연구개발의거점을만들고연구개발의빠른단계에서해외의관계자와협동하는환경을정비한다. 이를위해서 (1) 자율주행시스템의국제협조활동의추진 자율주행과사람의역할에관한이념과시스템아키텍처에관한공통인식양성 의논의장으로서일본에서의국제심포지엄의정기개최 기존의국제적인기준조화와표준화활동의일체된활동 국제적으로오픈된연구환경을정비하고각국의연구기관과기업이자동차를내놓고협조영역의실천적연구를공동으로실시 (2) 자율주행시스템의국제동향조사의집약 유럽연합과미국연방운수성의관련연구개발 학회와민간컨소시엄에의한관련연구개발 법제도면에서의검토상황을 2014년도부터착수한다. 2 자율주행시스템의사회수용성양성자율주행시스템의실용화 보급을위해서는일반시민이깊이이해하는사회수용성을양성해나갈필요가있다. 또한자율주행시스템에대한운전자의기대와실상사이에괴리가발생하지않도록하기위해서 (1) 운전자와자율주행시스템의역할과인터페이스에대한연구 (2) 국내외자동차교통관련이벤트에있어서체험형이해촉진활동 (3) 미디어미팅등을통한이해촉진활동을추진한다. 3 국제패키지수출체제구축자율주행시스템을동남아시아등에패키지수출하는비즈니스의확립을위해서필요한체제를구축한다. (1) 교통매니지먼트서비스와인프라의패키지수출에관한연구 IV. 차세대도시교통으로의전개 1 지역교통매니지먼트고도화교통사고사망자를확실하게저감하기위해서는현장이되는지역의교통환경과사람의행동양식을바꾸어나갈필요가있다. 이를위해서 (1) 지역교통안전활동을위한기반정비와지역지원 (2) 도로유효활동의추진 (3) 멀티모달의추진 (4) 이상기후 재해시의이동지원시스템의개발과실장 72
 차세대공공도로교통시스템의개발 3 접근성 ( 교통제약자대상 ) 의개선과보급휠체어이용자와고령자등의교통제약자를시작으로모든사람들의안전 안심, 원활한이동의지원을실현하는기술개발에착수한다. (1) 교통제약자및보행자의이동지원시스템의개발을위한기본설계 63) 완전자율주행시스템 ( 레벨 4) 의시장화에대해서는, 試用時期를상정.")
83 중에서 (1), (2) 에대한검토를착수하고 (3), (4) 는 2015년도이후에착수한다. 2 차세대교통시스템의개발 2020년의동경올림픽 패럴림픽을 SIP 자율주행시스템의이정표로서일본의장래의발전에도움이되는차세대교통시스템 (ART: Advanced Rapid Transit) 의실용화를위해서아래의개발에착수한다. (1) 차세대공공도로교통시스템의개발 3 접근성 ( 교통제약자대상 ) 의개선과보급휠체어이용자와고령자등의교통제약자를시작으로모든사람들의안전 안심, 원활한이동의지원을실현하는기술개발에착수한다. (1) 교통제약자및보행자의이동지원시스템의개발을위한기본설계 63) 완전자율주행시스템 ( 레벨 4) 의시장화에대해서는, 試用時期를상정. 64) 자율주행시스템에서진로생성을위해서종래의도로선형을그리는지도정보와함께도로의구조와주행로환경등의정보를통합화한디지털지도정보. 65) 완전자율주행시스템 ( 레벨 4) 의시장화에대해서는시험시기를상정. 73

84 일본자동주행비즈니스검토회향후대응방안개요 2016 년 3 월 23 일 74
85 75
86 76
87 기술면과사회면의과제 - 대열주행, 자동발렛파킹, Last one Mile 자율주행 - 77
88 78

 는도시간고속도로와자동차안전법규를재정, 경무청 (NPA, National Police Agency) 는도심의교통을통재하고, 경제통상산업부 (METI,")
89 그외대표적인기술개발내용으로는도로등의인프라에서주변상황을수신받는 ITS의필요성이대두되고있으며 2015년부터일부교차점및자동차에서실용화추진중에있다. 일본은 ITS 기술에대한정부의지대한관심으로이미 70년대부터 ITS 적용기술에대해연구를했고, 4개의정부부처가연합으로 ITS 적용기술에관한지원을하고있다. 국무및통신부 (MIC, Ministry of Internal Affairs and Communications) 는무선통신기술과주파수를할당하고, 국토기반운송관광부 (MLITT, Ministry of Land, Infrastructure, Tranport, and Tourism) 는도시간고속도로와자동차안전법규를재정, 경무청 (NPA, National Police Agency) 는도심의교통을통재하고, 경제통상산업부 (METI, Ministry of Economy, Trade, and Industry) 는국가경제건정성, 국가경쟁력향상을통한일자리창출을담당하면서기술개발을지원하고있다. < 그림 12>ITS 기술에대한일본정부의지원현황 79

90 이를통해일본정부는자율주행자동차의연구를첨단안전차량에대한 3단계의프로젝트 (Intelligent Vehicle, PVS(Personal Vehicle System), AHVS(Automated Highway Vehicle System)) 를통하여발전시켜왔으며, 이프로젝트들은도로환경의인식, 시각장치, 주행제어장치개발등을주요연구대상으로진행되어왔다. Intelligent Vehicle 프로젝트 는 1970년대중반부터 Mechanical Engineering Laboratory 의주관하에소형자동차를위한장애물감지시각시스템과자율주행을위한예측항법시스템을연구해왔다. ITS Spot 서비스 는도시내네비게이션시스템질향상과교통안전향상을위한더많은교통정보를운전자에게공급하기위해도로와자동차에 DSRC를적용하여차량에교통상황전달하는서비스를 2009년부터시작했다. 이는차량의커브진행시보이지않는지역에발생한교통혼잡과같은상황을전달하고, 고속도로진행시오르막과내리막길에서교통정보와연동해서 ACC의최적속도를 ITS Spot으로부터전송하여 C-ACC(Cooperative Adaptive Cruise Control) 가가능하도록했다. < 그림 13>ITSSpot 개요및현황 80


91 < 그림 14>ITSSpot 적용혼잡상황저감기술개요 energy ITS 프로젝트 는에너지통상산업부를통해공기저항을감소를통한에너지저감및 CO2 배출감소를목적으로 2008년부터 2013년까지 1,200 만달러의 eits 프로젝트를지원했다. (JARI 중심으로 25톤트럭에다양한센서를부착해서 C-ACC 기능을비롯하여 AEB 기능까지적용되어있지만, 자동차선변경을적용되지않았음 ) < 그림 15>eITS 적용트럭군집주행시스템구성도 81

92 < 그림 16>eITS 적용기술 Auto Pilot System 프로젝트 는도로분야나자동차분야에서연구개발 실용화가진행되어온 ITS는교통사고의저감이나정체의해소 완화에공헌해왔지만, 이들문제점의근본적인해결을도모하기위해서인프라와자동차의협조시스템의실현등종래의 ITS 기술을더욱더고도화, 융합시킨차세대 ITS의도입이기대되고있으며, 이러한움직임에서국토교통성에서는차세대 ITS에대한연구회를구성해서차세대 ITS에관한니즈또는기술적, 제도적인과제등을분석, 새로운개념인고속도로상에서자동주행의실현을향한검토를아래와같이수행하였다. ( 고효율이고친환경적인도로교통사회구현 ) 고도의정체예측시스템등이사회시스템으로서구축되어자동주행자동차와제휴하는것과동시에주행경로가같은자동주행자동차간에고정밀한추종주행을실시하는등정시성, 속달성의비약적향상과고효율이고친환경적인주행이가능할것으로기대됨. 게다가고효율인도로교통사회는물류 인류의활성화를보진하고산업경쟁력의강화나노동형태의변화에도기여할것으로기대됨 ( 안전성이현격히향상된도로교통사회구현 ) 고도의노차간 차차간통신의협조기술 이나안전제어기술이탑재되어서복잡한교통환경에서도운전자가모든조작을실시했 을때와동등이상의높은안전성을확보하는것이가능할것임. 이러한시스템이사회 82
93 시스템으로서실장되어보급되므로안전성이현격히향상된도로교통사회를실현하는 것이가능함 ( 다양한이용자가편리성을만끽할수있는이용환경구현 ) 주행예약시스템이나 HMI 기술등과고도의자동주행이융합되므로철도등다른교통시스템과심리스하게이용가능한환경을구축해서주행을즐기는것으로도자동주행을이용가능하고장애인, 고령자등의운전취약자에게폭넓은이용도기대됨. 이러한시스템이사회시스템으로서실장되어보급되므로다양한이용자가새로운도로교통사회의편리성을만끽할수있을것임 ( 달성목표 ) 2020년대초반부까지고속도로본선 ( 분 / 합류때를제외 ) 에서고도의운전지원시스템에의한연속주행의실현을목표로함. 또한 2020년대초반부이후도자동주행시스템의試用개시를위한정부목표 ( 일본재흥전략 ) 에도이바지하도록지속하여고속도로의분 / 합류부, 정체다발구간등에서도최적인주행도포함한고도의운전지원시스템에의한연속주행의조기실현을목표로함 민간기업의경우닛산은 2015년 10월 28일일본도쿄모터쇼에서향후 4년동안자율주행기술을탑재한자동차 10종이상을양산할것이고이양산차들은미국, 유럽, 일본, 중국에서판매되며저렴한가격으로대량생산될예정이라고발표하였다. 기술개발내용으로는 3차원라이다또는특수제작된주행용맵도필요없는기술을적용하고있으며, 전기동력차량을기반으로해서리프후속모델을목표로자율주행자동차개발프로젝트연구그룹을실리콘벨리로이전하여, 2013년말도심형자율주행자동차에대한시험기반을구축한상태이다. 2020년까지는도심교차로와교통체증이심한지역에서도시교통체계를따라자율적으로주행가능하도록추진할예정이다. 도요타는실리콘밸리에인공지능연구개발거점으로 도요타리서치인스티튜트 (TRI)' 를설립하고, 향후 5년동안약 10억달러를투입할계획이라고발표하는등자율주행자동차기술개발을위한다양한시도를하고있다. 특히, 운전스킬에상관없이사고를내지않도록하는것, 자동차를더운전하기쉽도록만드는것, 모바일기반가사를도울수있는로봇을개발하는것, 인공지능과학습된기계의지식을활용하는것의 4가지연구목표를위해다양한기술개발을추진중이다. 도요타는이미 1998년부터 IMTS(Intelligent Multimode Transit System) 연구를시작해서전용도로상의자기마커적용자율주행기술, 군집주행및대열간충돌방지기술, 중거리공공교통시스템을목적으로연구를진행하였다. 이를통해, 1999년메가웹에 e-com RIDE를장내오락시설로운행하였고 2005년아이치국제박람회에서회장내 83
 을개발했다.")
94 수송시스템으로사용하였다. 아이치국제박람회에사용된 IMTS 는 3대의차량에의한군집주행과전용도로를자율주행하는대열에서일부가전용도로를나와다른교통과혼재하는박람회장내도로를일반버스로수동운전하는모드로구성되었었다. 혼다자동차는동경대학교고등과학기술연구센터와의공동연구로적용차량의경우앞차와의차량간격을일정하게유지시켜줌으로써일시적인교통혼잡시교통흐름을 23% 향상시키고, 8% 의연료절감효과가있고 ACC기술과결합하면 30% 의교통흐름향상과 13% 연료절감효과가있는교통혼잡저감기술 (TJA : Traffic Jam Assist) 을개발했다. < 그림 17> 혼다자동차의교통혼잡저감기술 2015년 5월, 일본 DeNA 와 ZMP는공동으로자율주행기술을활용한여객운송사업의실현을위한연구개발등을수행하는합병회사인 Robot Taxi 를설립하였다. 과소화 66) 또는고령화가진행되고있는지역의고령자나어린이, 장애가있는사람들의불편한생활을하고있는사람들을지원하는역할등을포함한새로운교통수단을실현하는것을목표로하고있다. 이는, 병원또는요양시설을순회하고, 폐선이되어버린지방노선버스또는전차등을대체하며, 해외에서방문해온관광객대응등의서비스시나리오를구상하고있으며 2020년동경올림픽까지무인교통서비스의정식상용화를추진중에있다. 일본가나가와현후지사와시실증실험에서는주민약 50명이모니터요원으로서참가하여로봇택시가승객의자택 66) 인구나산업등이거의모두빠져나간상태 84
95 까지마중하러가서약 3Km 떨어진간선도로를통하여슈퍼마켓까지데려다주는왕복코스 ( 운행차량 2 대, 예비차량 2 대를준비 ) 를시험운행 67) 중에있다. 3. 자율주행자동차관련입법현황가. 자율주행자동차시험운행의근거규정일본에서자동차를도로에서이용하기위해서는도로교통법에명시된요건을충족해야한다. 이와관련하여일본도로교통법제70조는안전운전의무를규정하고있다. 이에의하면, 차량등의운전자는당해차량의핸들, 브레이크그외의장치를조작하며, 또한도로, 교통및당해차량등의상황에맞게타인에게위해를가하지않는속도와방법으로운전하지않으면안된다. 고규정하고있다. 이규정에비추어보면, 차량등의핸들, 브레이크그밖의장치 의확실한조작이수반되지않는운전유형은자동차운전에수반되는사고방지라는도로교통법제70조의취지에반하므로도로교통법상허용되지않는행위가된다. 68) 일본의현행도로교통법상자율주행자동차의주행허용성에관하여일본학계에서는자율주행기술의발전정도에따라서달리평가하고있다. 즉, 운전자가가속 조타 제동에관여하는여지가남겨져있는 Level 2까지의자율주행자동차의운행은현행도로교통법에저촉되지않지만, 운전자의관여도가낮은 Level 3와운전자의관여가전혀필요없는 Level 4의자율주행자동차의운행은현행도로교통법의규정상허용되지않는것으로해석된다. 따라서현행도로교통법의규정에따라서자율주행기술을시험하기위해서는실험차량에대한예외적면허를받아야한다. 이를위해일본에서는 2013년 9월부터공공도로에서시험주행을허용하기위하여시험주행용차량번호판을부착한자율주행자동차를예외적으로허용하고있다. 현재 Nissan 과 Toyota 가자율주행자동차프로젝트에참여하고있다. 나. 제네바도로교통협약개정논의일본은도로교통에관한비엔나협약에는가입되어있지않고, 그대신우리나라와같이 1949년의제네바협약에비준하였다. 그런데일본도로교통법제70조에규정된운전의정의는, 핸들, 브레이크및기타장비를운전자가확실하게작동하는것을기본개념으로하고있다. 이와관련하여현재실용화되어있는자율주행기술에의한주행이도로교통법상의운전개념과부합하는지의여부가문제로된다. 이러한문제의식은새로운것이아니라지금까지도제네바협약에가입한국가와국제기구에서논의되어왔다. 현재도로교통에관한제네바 67) 안전을위해시험주행중인운전석에는승무원이앉아서긴급시적절한대응을하고있음 68) 이형범, 일본의자율주행자동차관련법적허용성과민사 행정 형사책임연구동향, 월간교통, ( 통권 215 호 ), 79 쪽. 85
96 협약이자율주행자동차와관련된개정절차가진행되고있으므로제네바협약이개정되면그 개정내용을일본의국내에서곧바로이행할것으로보인다. 다. 자율주행자동차에관한법제도적논의일본에서는자율주행자동차의법적문제에관한논의는대체로저조한것이현실이다. 69) 그런데일본경찰청의용역발주에따라서일본능률협회총합연구소가수행하여 2016년 3월에발표한조사연구결과 70) 에는자율주행과관련한형사상의책임, 행정법규상의의무및민사상의책임등을제안하고있다. 그내용을살펴봄으로써일본에서의자율주행자동차관련법률적논의를개관할수있을것이다. (1) 자율주행관련형사책임 71) 일본의현행도로교통법은교통의안전과원할을도모하기위해운전자에대해도로교통법제79조의규정에따라안전운전의무등다양한의무를부과하고있어교통사고또는교통위반시에원칙적으로운전자가그책임을부담하게된다. Level 2에서자율주행모드중운전자는주위의도로교통상황등의감시의무가부과되므로운전자가책임을부담함에반해, Level 3에서는운전자의과실책임이인정될지여부는원칙적으로운전자에게교통사고등의예견가능성및결과회피가능성이있는가의여부에달려있으므로시스템과운전자간에차량의조작권한의이전에관한구체적인기술개발의방향성을확인하여교통사고등에서도로교통법상의책임방향을검토할필요가있다. 또한무인상태를포함하여운전자가차량의조작에전혀관여하지않는상태인 Level 4는도로교통에관한제네바협약에관한국제적인논의에입각하여구체적인기술개발의방향성을확인하고, 교통사고등에서의도로교통법상의책임방향을검토할필요가있다. 이와함께교통사고의형사책임과관련하여 자동차의운전에의해사람이사상된행위등의처벌에관한법률 (2013 년법률제86호 ) 의적용관계등에서도검토가필요하다. 또한교통사고의진상을규명하고그책임을추궁하는데있어서, 차량주변의상황이나차량상태정보를기록하는드라이브레코더나이벤트데이터레코더등이유용하다것으로보이기때문에그장비방향에대해검토할필요가있다. 또한예를들어, 주변에차량이접근하는중에자율주행시스템이고장등에의해갑자기작동한계에도달하여다른차량과충돌하지않으면해당비상사태에대응할수없는상황 69) 川本哲郞, 自動運轉と刑事法, 한국법학회개최, 2016 년도한 일추계국제학술대회, 자율주행자동차상용화에따른법적제문제, , 81 쪽. 70) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, ) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 쪽. 86
97 등이예상되지만, 이와같은비상사태등에서의차량의작동을자율주행시스템에미리설정 하는경우에는교통사고등의책임방향과관련하여그알고리즘설정의방향과해당설정의 타당성을검증하는방법등을검토할필요가있다. (2) 자율주행관련행정법규상의의무 1 차량의점검 정비의무에관하여 72) 자율주행시스템이정상적으로기능하기위해서는자율주행시스템이상정한기능이양호한차량의상태를유지할필요가고려되어야하는데, Level 4에서는원칙적으로차량의사용자가도로운송차량법제4장에서규정하고있는차량의점검 정비의무를부담해야한다는지적이있는데반해, 자율주행시스템의구조를이해하는못하는사용자가점검 정비를하도록하는것은곤란하므로사용자에게점검 정비의무를부과할수없다는지적도있다. 제조사나차량에따라자율주행시스템의개별기능및점검 정비방법이다를가능성을고려하면서차량의점검 정비의무방향에대해관계당국이구체적인기술개발의방향성을확인하면서검토할필요가있다. 2 자율주행시스템의보안확보관련의무 73) 자율주행시스템의소프트웨어등을적절하게업데이트하는것이중요하다. 한편, 자율주행시스템등이외부네크워크와연결되는경우차량의주행제어관련시스템등이사이버공격을받을가능성도있다. 자율주행시스템의보안확보에관한의무의방향에대해관계당국이구체적인기술개발의방향성을확인하면서검토할필요가있다. 3 운전면허제도등의방향에관하여 74) 자율주행시스템을이용하는경우에요구되는운전면허및연습에대해서는, 긴급할경우에운전조작이필요한 Level 3에서는현재와동일하게운전기술이필요하다는지적이있음에반해, 통상의운전기능에추가하여자율주행시스템특유의조작및거동에관한유의점등을운전자가이해할수있도록연습의도입이필요하다는지적이있다. 그리고고령자등이동을지원하는관점에서취득요건을완화해야한다는지적도있다. 자율주행시스템을이용하는경우운전면허제도등의방향에대해운전자에부과되는의무및교통위반시책임의방향과밀접하게관련되어있으므로제조사나차량에따라자율주행 72) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 78 쪽. 73) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 78 쪽. 74) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 78 쪽. 87
98 시스템의개별기능및조작방법등이다를가능성있는점을고려하여구체적인기술개발의방향성을확인하여검토할필요가있다. Level 4에서차량에승차한자에게는운전면허가필요하지않는다는지적이있는데반해그운행을관리하는자에게는안전을담보하기위한자격이필요하다는지적이있다. 제네바협약에관한국제논의에입각하여구체적인기술개발의방향성을확인하면서검토할필요가있다. 4 교통사고시구호 보고의무에관하여 75) 일본도로교통법제72조에의하면교통사고가발생한경우운전자기타승무원에게구호 보고의무를부과하고있는데, 자율주행시스템이이용되는경우에도피해자보호등의관점에서같은의무를부과할필요가있다. Level 3의경우차량의운전자가존재하므로교통사고발생시운전자에묻는책임의내용이현재와같이운전자기타승무원에게대한구호 보고의무를부과할가능성이있다는지적이있다. 한편, Level 4와이른바원격조종에관해서는차량에승차하고있는사람의위치와차량에승차하고있는사람이없는경우도상정할필요가있을수있음을포함하여제네바협약에따른국제적인논의를바탕으로교통사고시구호 보고의무의방향을검토할필요가있다. 5 운전자이외의자에게관계되는의무에관하여 76) A 자율주행자동차에승차한자에게관계되는의무에관하여일본도로교통법에서는예컨대제7조의 3 제2항에의하면운전자는좌석벨트를장착하지않은자를운전자석이외의승차장치에승차하고자동차를운전해야하므로동승자의안전확보에관한조치가원칙적으로운전자의의무인데반해, Level 4의경우에는현재와같이운전자의위치에의해운전자에게의무를부과하는것이현실적이지않는경우를상정해보면자율주행자동차에승차하는사람의안전을담보하는데필요한조치를할의무를부과하는점을검토할필요가있다. B 기타도로이용자에관계된의무에관하여 시스템이요청하는대로운전자가대응하는것을상정하는 Level 3 및운전자가차량의조 작을전혀관여하지않는상태에있는 Level 4 의자율주행자동차가일반의도로이용자와혼 75) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 쪽. 76) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 79 쪽. 88
99 재되어주행하는경우에는운전자간의통신등에변화가생길것이라는지적이있으므로교통안전을원활하게확보하기위해서는다른도로이용자에게새로운의무를부과할지여부에대해구체적인기술개발의방향성을확인하면서검토할필요가있다. 또한다른도로이용자에게새로운의무를부과하는경우자율주행자동차에대해해당차량이자율주행차동차이고자율주행모드중에있다는점을다른도로이용자에게명확하게표시할의무를부과해야하는점에대해서도검토할필요가있다. (3) 자동주행관련민사상의책임 77) Level 3에서현재와같이교통사고가발생하는경우일본자동차손해배상보장법등이적용되는데, 원칙적으로같은법제3조에서규정한자기를위한자동차를운행에이용하는자가손해를배상할책임을부담하게되고, 해당자이외의자의책임에대해서는고의또는과실등개별적으로구체적인사정에따라판단해야한다는지적이있다. 또한교통사고가발생한경우에도자율주행시스템의제조자의책임이물을가능성이높다는것의지적이있는데, 자율주행시스템의보안에문제가있는경우복잡한문제가있는소프트웨어의문제를개인인교통사고피해자가증명하는것은곤란한경우가있다는지적이있고, 책임관계가복잡하여교통사고피해자에대한보상이지연되는것을피해야할필요가있다는지적도있다. Level 4의자율주행자동차및각 Level 의자율주행자동차가혼재된경우를포함한민사상의책임방향에대해서도검토가필요하다. (4) 기타 78) 1 자율주행의구체적형태에대응한과제 A 전자연결에관하여 일본재흥전략 개정 2015의 개혁 2020 프로젝트인트랙의대열주행이나라스트원마일자율주행을실현하기위한기술적검토가진행되고있는전자연결에대한구체적인기술개발의방향성을확인하면서후속차량이무인인경우의대열주행내용은제네바협약에관한국제논의도감안하면서도로교통법및도로운송차량의보안기준 (1951 년운수성령제67 호 ) 의취급을검토할필요가있다. B 원격조종에관하여 이른바원격조종으로차량을주행하는경우에관해서는차량에서원격에존재하고통신 77) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 79 쪽. 78) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 80 쪽. 89
100 기술을이용하여차량을조작하는사람을당해차량의운전자로자리매김할수있는지여 부등제네바협약에관한국제논의도고려하면서구체적인기술개발의방향성을확인하면서 도로교통법및도로운송차량의보안기준상취급을검토할필요가있다. 2 세컨드태스크 (second task) 에관하여 Level 3에서는, 시스템이요청하는경우에만운전자가대응하는것을상정하고있는자율주행모드중에 ( 시스템이요청하는경우에는운전자가대응하는것을전제로 ) 이른바세컨드태스크로어떤행위까지허용되는지에대해서는시스템과운전자간의차량의조작에관한권한의위임등에관한구체적인기술개발의방향성을확인하면서검토할필요가있다. 3 교통규제등의운용에관하여자율주행시스템을이용하는경우에는다른도로이용자뿐만아니라도로교통법을비롯한관계법령을준수하여주행해야하는것은당연하지만고속자동차국도에서가속차선등과본선차도간에제한속도에큰차이가있고, 규제속도와실제속도가괴리되어있는곳이있으므로주행의어려움도지적되고있으므로이러한문제점을해결하기위한교통규제등의운용방향에대해검토할필요가있다. 4 인프라에관하여자율주행시스템을보다안전하고원활하게작동하기위해서는지도정보, 신호정보등을실시간으로차량이인식하기위한인프라의정비가필요하고, 당해인식한정보의정확성을확보하기위한대책등을포함한인프라정비의방향성을검토할필요가있다. 5 사회적수용성에관하여완전자율주행시스템은지금까지일반적으로이해되는 자동차 와는전혀다른것으로되기때문에그도입에있어서는사회적수용성이요구된다. 자율주행에대한국민각계각층의아이디어는자율주행의효용 기능 한계등에관한정보의주지상황, 기술개발의진전상황, 사회경제정세등에따라변화하는것으로생각되므로지속적으로설문을실시하는등국민각계각층의생각을파악하기위하여노력하고그당시의사회적수용성을감안하면서자율주행의실현을위한제도의방향성을검토할필요가있다. 6 국민을위한정보제공에관하여 국민이자율주행의가치를즐길수있는자율주행의효용 기능 한계등을제대로이해 90
101 해야한다. 따라서민관이협력하여이러한정보를그당시의기술개발의진전상황을감안 하여일반국민을대상으로알기쉽게설명해나갈필요가있다. 91
 과우리나라자율주행자동차관련법제연구현황 ( 제2절 ) 을개관한다음자율주행자동차상용화대비도로교통법개정방향에관한전문가설문조사의결과를제시하고 ( 제3절 ), 이를토대로각각의쟁점사항별로도로교통법개정방향을제시 ( 제3절 ) 할것이다.")
102 제 5 장자율주행자동차상용화대비도로교통법개정방향 일반적으로도로교통법은자율주행자동차의상용화의법적장벽으로인식되고있다. 현행도로교통법은도로교통분야에서다양한규제를명시하고있는데, 이러한규정들은자율주행자동차를전제하지않은채시행되고있어자율주행자동차의주행과부합하지않는측면이있기때문이다. 이점에서자율주행자동차가상용화될경우에도로교통법의규제완화와규제진설등에관하여고민해보아야한다. 본장에서는우리나라자율주행자동차기술개발현황 ( 제1절 ) 과우리나라자율주행자동차관련법제연구현황 ( 제2절 ) 을개관한다음자율주행자동차상용화대비도로교통법개정방향에관한전문가설문조사의결과를제시하고 ( 제3절 ), 이를토대로각각의쟁점사항별로도로교통법개정방향을제시 ( 제3절 ) 할것이다. 제 1 절우리나라자율주행자동차관련기술개발현황 국내자율주행자동차관련기술개발의경우정부정책상직접적인지원없이스마트카기술개발사업의일환으로부품기술개발 ( 산업통상자원부및미래창조과학부 ) 와 C-ITS( 국토교통부 ) 관련기술개발사업으로추진되어왔다. 즉, 다양한지원사업의형태에따라, 부품, 소재, 융합등의분야별부품기술개발에주력해왔다고볼수있다. < 그림 18> 자율주행관련주요정부기술개발정책현황 이에따라, 해외선진국대비자율주행자동차관련기술의경우전문가들에따라약간의 92

103 차이는있으나, 구글자율주행자동차와의기술격차는최소 5년이상에이를것으로판단된다. 구글의경우이미, 자율주행자동차를개발하고시험주행을수백만키로를하고있어그에따라축적된데이터에서도비교불가결하다는것이다. 국내대표주자격인현대기아자동차의경우, 자율주행자동차를선보이고는있으나, 관련기술은해외연구소를통해글로벌기업들의부분품기술을적용해구성하는수준으로실제국내기술의적용율이매우낮다. 향후, 자율주행자동차관련기술은그부가가치가매우높은분야로산업적경쟁력확보가매우중요하다고판단되며, 이러한기조에따라국내에서도산업통상자원부주관으로자율주행자동차관련핵심부품상용화관련기술개발사업에대한예비타당성조사를실시하고예산을확보하여 2017년부터본격적으로추진할예정이다. 다만, 산업통상자원부차원에서추진하는기술개발사업의경우예산확정이기획시점대비 3년이상이경과되었고, 기술개발목표역시 NHTSA 분류기준상자율주행 2-3단계의기술로경쟁력확보가어려울것으로판단되어미래기술을목표로국토교통부 -산업통상자원부 -미래창조과학부 -경찰청등이참여하는다부처공동사업으로 국가전략프로젝트 를아래와같이기획중에있다. 이는 3-4단계를목표로완전자율주행자동차를기반으로한다양한시범사업까지내포하고있어향후법제도개선을위한문제점도출에용이할것으로판단된다. < 그림 19> 국가전략프로젝트추진로드맵계획 민간기업차원에서의관련기술개발현황을살펴보면, 현대기아차에서는 2015 년 12 월 EQ900 모델에차선유지제어와차간거리제어및네비게이션맵을통합한고속도로주행보조 (HDS: Highway Driving Assist) 장치를적용하였다. HDS 에는벤츠와같이운전가의 Hand-Off 93
104 가 8초이상지속될시기능이해제되도록설계가되었다. 이후 2020년에는도심혼잡구간에서차선인식불가시레이더, 영상센서로주행상황을종합적으로판단하여앞차와일정거리를유지하는 TJA(Traffic Jam Assist) 의상용화를목표로하고있다. 동사는또한, 자율주행자동차기술이탑재된쏘울EV 를 CES2016 년에공개하고자율주행자동차브랜드인 드라이브와이즈 를론칭하고관련기술개발로드맵을제시했다. 또한, 그룹사인현대모비스는자율주행자동차를위한 i-cockpit 시스템을 CES2016 을통해공개하고자율주행자동차의운전석환경을구현했다. LG전자는 V2H(Vehicle to Home) 로집안기기를조종하는시스템과자율주행자동차의핵심기술인주변상황인식과정밀지도가연동된기술개발을추진중에있으며, 스마트카용인포테인먼트시스템, 스테레오카메라, 전기차등을독자개발하고있다. 삼성전자는 2015년 12월전장사업팀을신설하며차세대주력으로카인포테인먼트와자율주행자동차전장품사업에진출을선언했으며, 글로벌카인포테인먼트업체인하만카돈인수를통해사업추진을가시화하고있다. 자율주행관련하여서도카인포테인먼트개발사인빈리, 자율주행자동차 SW를개발하는 MIT출신벤처기업인누토노미등에투자하는등관련기술확보에노력중이다. 제 2 절우리나라자율주행자동차관련법제연구현황 1. 한국법제연구원한국법제연구원에서는 2014년에 미국의자율주행자동차임시운행허가에관한규제분석 에관한연구를수행하였다. 과제의성격은국토교통부첨단도로환경과의신청으로작성한법제분석지원 Issue Paper였다. 이연구에서다룬주요내용은자율주행자동차개념과추진현황, 미국의입법현황, 시사점등이다. 주요연구결과를요약해보면다음과같다. 2014년 11월말현재자율주행자동차와관련입법이통과한캘리포니아주, 네바다주, 플로리다주, 미시건주, 콜롬비아주의사례를분석하였다. 이연구에의하면, 자율주행자동차와관련된각주의입법은자율주행자동차의운행을금지하지는않으나대부분면허가있는운전자, 즉인간으로판단할수있는운전자의존재를가정하고있는경우가많으며, 특별한경우에는반드시착석을요구하고있다. 그밖에시험운행을위한자율주행자동차의승인요건, 자율주행기술의적합요건등에대하여규율하고있다. 연방차원에서는 2013년 5월 NHTSA 가자동화된운송수단의안전주행에관한지침을담은 94
105 권고안 (Preliminary Statement of Policy Concerning Automated Vehicles) 배포하였다. NHTSA 의규정은자율주행자동차가준수하여야하는연방자동차안전기준 (Federal Motor Vehicle Safety Standards) 을포함하고있으며자율주행자동차의운행을금지하고있지는않다. 이연구의시사점으로는다음과같이요약할수있다. 첫째, 도로법, 도로교통법및자동차관리법등현행법개정을통해자율주행자동차에대한운행을허용하는수준으로개정하는방안이고려될수있으며, 이러한방안에의할경우미국의입법례와같이자율주행자동차의운행허용요건, 자율주행자동차요건및책임등을관계법령별로개정하여야할것이다. 둘째, 도로와자동차관련된다수의법령과관계되는자율주행자동차에관한특례법을제정하는방안을고려할수도있다. 자율주행자동차에관한특례법은자동차의운행에관한보다많은국내외규범에대한고려가필요하다. 셋째, 어떠한경우에도자율주행자동차및자율운행기술등핵심개념에대한법적정의가이루어져야하며, 시험운행을위한인적 재정적요건, 자율주행자동차의등록기준과기술요건, 시험운행에대한승인요건, 법시행에필요한관계당국의규정마련의무등이마련되어야할것이다. 2. 한국교통연구원 한국법제연구원의공동연구 2015년부터 2017년까지연구수행이예정된한국교통연구원 한국법제연구원의 스마트자동차시험운행을위한도로관련제도개선연구 는과업기간이 2015년 5월부터 2017년 3월까지이며, 발주처는국토교통부첨단도로안전과이다. 주요연구내용으로는, 1 자율주행자동차임시운행안전운행요건중운행구역지정규제정비 ( 자율주행자동차임시운행도로대상현황조사및분석, 자율주행자동차임시운행지정도로확대관련제도개선방안및규제프리존등적용방안, 자율주행자동차임시운행활성화를위한운행구역규제네거티브전환방안 ), 2 자율주행자동차를고려한도로및교통특성에따른도로안전가이드라인제정안마련, 3 자율주행자동차해외법제및국제협약검토, 4 자율주행자동차운행에따른도로시설관리자의책임관련제도개선방안, 5 자율주행자동차및 C-ITS 등고려한도로관련법제발전방향도출등이다. 한국교통연구원과한국법제연구원이공동으로수행한이연구결과가활용된예를보면다음과같다. 첫째, 자율주행자동차안전운행조건관련자동차관리법시행규칙이 2016년 2월 11일자로개정되었다. 자동차관리법제27조 79) 단서에서규정하고있는시험 연구목적으로자율주행자 79) 제 27 조 ( 임시운행의허가 ) 1 자동차를등록하지아니하고일시운행을하려는자는대통령령으로정하는바에 95
106 동차를운행하고자하는경우의안전운행요건을제시하는자동차관리법시행규칙규정을신설한것이다. 신설된제26조의 2는다음과같다. 제26조의 2( 자율주행자동차의안전운행요건 ) 1 법제27조제1항단서에서 " 국토교통부령으로정하는안전운행요건 " 이란다음각호의요건을말한다. 1. 자율주행기능 ( 운전자또는승객의조작없이자동차스스로운행하는기능을말한다. 이하이조에서같다 ) 을수행하는장치에고장이발생한경우이를감지하여운전자에게경고하는장치를갖출것 2. 운행중언제든지운전자가자율주행기능을해제할수있는장치를갖출것 3. 국토교통부장관이정한운행구역에서만운행할것 ( 자율주행기능을사용하는경우만해당한다 ) 4. 운행정보를저장하고저장된정보를확인할수있는장치를갖출것 5. 자율주행자동차임을확인할수있는표지 ( 標識 ) 를자동차외부에부착할것 6. 자율주행기능을수행하는장치에원격으로접근 침입하는행위를방지하거나대응하기위한기술이적용되어있을것 7. 그밖에자율주행자동차의안전운행을위하여필요한사항으로서국토교통부장관이정하여고시하는사항 2 제26 조제1항에따라자율주행자동차의임시운행허가신청을받은국토교통부장관은법제32 조제3항에따라성능시험을대행하는자 ( 이하 " 성능시험대행자 " 라한다 ) 로하여금제1 항에따른안전운행요건에적합한지여부를확인하게한후안전운행요건에적합하다고인정하는경우임시운행허가를하여야한다. 3 제1항및제2항에따른안전운행요건의확인에필요한세부사항은국토교통부장관이정하여고시한다. 둘째, 자율주행자동차의안전운행요건및시험운행등에관한규정을 2016 년 2 월 11 일자로 제정하였다. 이규정은총 3 장 ( 제 1 장총칙, 제 2 장안전운행요건, 제 3 장임시운행 ) 21 개조문으 로구성되어있으며, 주요내용은다음과같다. 구분 일반적안전운행 규정내용 자율주행차는자동차자기인증이완료된자동차를대상으로하고, 모든 따라국토교통부장관또는시 도지사의임시운행허가 ( 이하 " 임시운행허가 " 라한다 ) 를받아야한다. 다만, 자율주행자동차를시험 연구목적으로운행하려는자는허가대상, 고장감지및경고장치, 기능해제장치, 운행구역, 운전자준수사항등과관련하여국토교통부령으로정하는안전운행요건을갖추어국토교통부장관의임시운행허가를받아야한다. 96
107 요건자율주행자동차의구조및기능 임시운행관련요건 공공도로주행관련제반법령을준수하도록제작되어야함 자동차손해배상보장법에따른보험가입의무화 자율주행자동차임시운행허가신청인은자율주행기능의작동을확인할수있도록시험시설등에서충분한사전주행실시의무화 허가신청대상자동차제시, 자율주행자동차의기술단계 구조및기능에대한설명서, 시험 연구계획서등필요한제출서류목록규정 후방차량운전자가자율주행자동차임을확인할수있는표지부착 성능시험대행자는자율주행자동차의안전운행요건등을확인하기위하여신청인에게시험시설등에서시험운행을요청할수있음 자율주행시스템기능을쉽게조작할수있는조종장치와자율주행시스템의기능작동여부를확인할수있는표시장치를갖추어야함 자율주행시스템의기능고장발생을감지하고운전자에게경고를줄수있는기능고장감지장치및경고장치를갖추어야함 자율주행자동차의안전운행을위하여최고속도제한장치및전방충돌방지기능을할수있는장치를장착하여야함 자율주행자동차임시운행에따른사고발생시사고분석을할수있도록운행기록장치및영상기록장치를갖추도록함 자율주행시스템의정상작동확인등을위해운전자이외에 1인이상의동승자가탑승하여야함 피연결자동차의연결운행금지 자율주행자동차안전운행요건및시험운행등에대한우리나라의요건을미국, 영국, 네덜 란드와비교하면다음과같다. 구분대상우리나라 ( 16.2.) 미국 ( 네바다주, 11.6) 영국 ( 15.2) 네덜란드 ( ) 대상차종 모든자동차 트레일러, 모터사이클, 4.5t 초과자동차제외 모든자동차 모든자동차 보험가입적절한보험소지 5M$ 보험증권제시적절한보험소지적절한보험소지 일반기준 사전시험주행 충분한사전주행필요 ( 마일리지기준없음 ) 10,000 마일사전수행 (16,000km) 폐쇄도로등에서충분한시험수행 ( 마일리지기준없음 ) 사전시험주행에의해고장및기능안전등검증필요 ( 마일리지기준없음 ) 식별표식자율차임시운행자율차전용임시운행규정없음규정없음 97
108 구조및기능 부착표지부착번호판부착 고장감지및경고장치 운전자우선자동전환 추가안전장치 운행기록장치 영상기록장치 최고속도제한기능전방추돌방지기능 교통안전법에따른운행기록장치 영상기록장치 특정기준없음 ( 다만, 허가기관인 RDW 재량에의해확인요구할수있음 ) 규정없음규정없음규정없음 사고 30 초전센서데이터기록 (read-only) 및보유 (3 년 ) 규정없음 차량장치작동기록 영상및음성기록설치가능 ( 차량장치작동기록대체용도불가 ) 허가기관에의해운행상황기록장치장착명할수있음 규정없음 운행기준 탑승인원 2 인탑승 2 인탑승규정없음규정없음 사고발생보고 허가구역 규정없음 고속도로 1 개구간국도 5 개구간등 ( 확대예정 ) 사고및교통법규단속 (10 일이내 ) 시험운행신청시신청자가명시한도로에서만시험운행 사고조사시협조및관련기관제출 4 개도시 ( 브리스틀, 코번트리, 밀턴케인즈, 그리니치 ) 규정없음 허가신청시시험운행도로신청 한편, 2016 년 2 월에시행된 시범운행운행구역지정공고 에의하면다음과같이고속 국도 1 개구간국도 5 개구간을자율주행자동차시험운행운행구역으로지정공고하였다. 구간시 종점연장비고 고속국도경부선 ( 서울 TG ~ 신갈 JC) - 영동선 (~ 호법 JC) 41km 터널 1 개소 국도 1 구간 국도 2 구간 국도 3 구간 국도 42 호선 ( 수원서수원 IC ~ 안산양촌 IC) 국도 39 호선 ( ~ 화성율암교차로 ) 국도 77 호선 ( ~ 평택내기삼거리 ) 국도 38 호선 ( ~ 평택오성 IC) 국도 42 호선 ( 수원신갈오거리 ~ 용인터미널교차로 ) 국도 45 호선 (~ 안성칠곡교차로 ) 국도 45 호선 ( 안성칠곡교차로 ~ 용인마평교차로 ) 국도 42 호선 ( ~ 용인양지 IC) 국도 17 호선 ( ~ 안성매산삼거리 ) 국도 38 호선 ( ~ 만정교차로 ) 61km 40km 88km 지하차도및터널 2 개소 터널 3 개소 국도 4 구간 국도 77 호선 ( 고양행주대교 IC ~ 파주당동 IC) 국도 37 호선 ( ~ 파주여우고개교차로 ) 국도 1 호선 ( ~ 고양대자삼거리 ) 85km 자동차전용도로포함 98
109 국도 39 호선 ( ~ 고양행주대교 IC) 국도 5 구간 국도 42 호선 ( 수원신갈오거리 ~ 용인터미널교차로 ) 국도 45 호선 ( ~ 광주태전교차로 ) 국도 3 호선 ( ~ 성남여수교차로 ) 45km 지하차도및터널 2 개소 또한 2015년 9월에서는자율주행차시험구간지정방식관련자동차관리법시행규칙개정안입법예고되었다. 주요내용을보면, 국토교통부장관이지정공고한구간에서만시험운행이가능하도록한방식을네거티브방식으로전환하고, 어린이, 노인및장애인등교통약자의보행안전성확보를위해국토교통부장관이별도로정한구역을제외한전체도로에서시험운행이가능하도록하는내용이다. 참고로현재는당초지정한시험운행구간인고속국도 1개소, 국도 5개소와추가로지정한규제청정지역 ( 프리존 ; 대구 ), 세종시등총 375km 구간에서만시험운행이가능하다. 3. 한국도로공사의스마트자율협력주행도로시스템개발이과제의성격은교통물류연구사업이고, 과업기간은 2015년 7월부터 2020년 7월까지이다. 현재 2차년도 ( ~ ) 연구가수행중이다. 주요연구내용을보면, 연구과제추진당시의세부별연구내용은다음과같이 2세부에서자율주행관련법제도정비에대한연구내용이포함되어있다. (1세부 ) 자율협력주행을위한도로기반시설고도화기술개발 (2세부 ) 자율협력주행도로시스템운영 관리기술개발 자율협력주행도로운영 관리기술개발 (TRL5 단계 ) 자율협력주행도로시스템효과분석연구 (TRL5 단계 ) 자율협력주행도로시스템실용화법 제도개선방안연구 (TRL8 단계 ) - 국내외자율협력주행관련법 제도정비및조직등개선방향도출 - 자율협력주행도로시스템관련법 제도재 개정 ( 안 ) 도출 - 자율협력주행기술교류및국내 외표준화추진 (3세부 ) 자율주행자동차연계협력주행실증기술개발 (4세부 ) 자율협력주행도로시스템 Test Bed 구축및평가기술개발 법제도정비부분은 1 차년도에종료되었고 2 차년도협약부터는법 제도관련연구를제 외한상태이다. 99
110 4. 한국교통연구원의자율주행자동차윤리및운전자수용성기초연구이과제의성격은한국교통연구원내부과제이고, 과업기간은 2016년 2월부터 2020년 11월까지이다. 주요연구내용다음과같이구성되어있는데, 특히자율주행자동차윤리에대한내용을포함하고있다. 자율주행자동차기술개발및정책현황분석 자율주행자동차윤리개념및인식분석 자율주행운전행태변화와윤리관계분석 자율주행자동차운전자수용성분석 자율주행운행시교통시스템문제점분석및개선 자율주행자동차 Human Factor 기술개발항목및기술개발수요도출 우선, 자율주행상황에서갑작스런교통사고등돌발상황발생시의책임소재, 충돌을회피할수없는상황에 어느누구를최우선으로보호해야하는가? 와같은윤리문제를해결해야할필요성에서연구내용에포함되어있다. 이것은로봇기능을가진자율차량이사고시인간과같은법적책임의주체가될수있는지, 또한자율차량을움직이는인공지능 (AI) 이 No-Win 상황하에서도특정선택을하도록프로그래밍되어있어야하는지와같이단순공학, 과학적기술로서해결하기어려운문제로서, 로봇윤리적인접근이필요하다고판단한것으로보인다. 또한자율주행자동차윤리개념정립, 운전행태및윤리문제분석을통한자율주행운전책임규명및대응기술, 정책방안마련이연구의주요목적에포함되어있다. 구체적으로보면, 자율주행운행행태및운전책임의변화및쟁점분석, 자율주행자동차운전책임및관련윤리개념정립, 자율주행자동차의 Human Factor 기술개발내용및과제도출등이다. 제 3 절도로교통법개정방향에관한전문가설문조사 1. 전문가설문조사의실시목적및목표자율주행자동차의상용화에따른도로교통법개정방향에관한전문가설문조사를실시한목적은자율주행자동차가상용화된후일상적으로운행되는것을전제로하여현행도로교통법상의다양한규제를완화내지폐지할필요성을검토하기위함이다. 현재의자동차시스템은운전자가모든운행기간동안조향장치와엑셀레이크및브레이크를작동해야한다. 이에반해자율주행자동차가등장하는경우에는사람에의한자동차운전의부담이현재보다훨씬완화될수밖에없다. 이점에서자율주행자동차가일상적으로운행되는시기에대비하 100
111 여이에상응한도로교통법상의규제를완화할가능성을검토해보아야한다. 이러한배경에서전문가설문조사는자율주행자동차의상용화를대비한도로교통법상의규제사항들에대하여자율주행시스템개발자, 연구자등의구상등을파악하고, 자율주행에대한법적과제를정리하기위한검토의기초자료로그목표가삼는데있다. 미국도로교통안전청 (NHTSA) 은자율주행기술발전단계를 Level 0부터 Level 4까지총 5단계로분류하고있다. 이중에서 Level 2에서는특정주행환경에서두개이상의제어기능이조화롭게작동하지만운전자가여전히모니터링및안전에대한책임을지고자동차에대한제어권을보유해야하는단계를말한다. 즉, Level 2에서는운전자가여전히모니터링을해야하므로운전자인사람이운전의주체가된다. 이점에서 Level 2까지는현행도로교통법이그대로적용되는데의문의여지가없다. 이에반해 Level 3은조향장치와엑셀레이트및브레이크를모두자율주행시스템이조작하되시스템이요청할경우에만운전자가대응하는자율주행기술의발전단계이다. 이점에서 Level 3은자율주행모드 ( 시스템모드 ) 와운전자모드가병존하는단계라할수있다. 세계적으로기술개발의목표로삼고있는단계로 Level 3이고, 도로교통에관한비엔나협약의개정내용뿐만아니라제네바협약의개정안도 Level 3을상정한것이다. 한편, Level 4는자동차의모든기능이자율주행시스템에의하여운영되기때문에이경우운전의주체는오로지자율주행시스템이고, 자율주행자동차에탑승한사람은일종의 승객 에불과할뿐이다. 자율주행자동차상용화대비도로교통법개정방향에관한전문가설문조사도 Level 3와 Level 4의자율주행기술을전제로하였다. Level 2의기술은이미현행도로교통법이적용되고있기때문이다. 2. 전문가설문조사의설계가. 조사방법특정한관심사에대한의견을수집하는방법론은전화인터뷰, 설문지에의한설문조사, 전문가설문조사등매우다양하게존재한다. 전화인터뷰는신속하고비교적비용이적게소요되는장점이있으나상세하게복잡한내용에관한설문조사의방법으로적합하지않은단점이있다. 설문지에의한설문조사는비교적적은비용을투입하여많은사람들을대상으로설문조사를할장점이있으나, 설문조사의대상자가자신에게문의된설문조사의문항에대하여타인의도움없이답할수있어야한다는한계가있다. 전문가설문조사는직업적전문가로활동하는사람들을대상으로설문하는것을내용으로한다. 이설문방법은복잡한문제에대하여비교적명확한응답을확보하는장점을지니고 101
112 있다. 다른한편, 전문가설문조사는쟁점사항과관련한복잡한문제제기가있을경우에이러한쟁점들을보완하는차원에서활용되는것이일반적이다. 자율주행자동차의상용화에대비한도로교통법개정방향의기초자료로삼기위한의견조사의방법은전문가설문조사에기초하기로하였다. 전화인터뷰나설문지에의한설문조사를실시하지않은이유는일반국민을대상으로자율주행자동차관련설문을조사할경우일반국민이자율주행기술의발전단계를모르고있을뿐만아니라일반국민의관점에서는자율주행자동차에관하여문의가제기되면당연히도로교통법상의규제가없어져야한다는내용으로응답할개연성이크기때문에본연구의목적과부합할수없는문제점이발생한다. 자율주행자동차는자율주행기술에의존하고있고, 이러한기술은현재발전과정에있으므로자율주행자동차의상용화에대비한도로교통법상의규제의완화도자율주행자동차관련전문가들을대상으로전문가설문조사를실시하면서그자문을구하는것이바람직하다. 전문가설문조사의진행과정은, 설문대상전문가들에게자율주행자동차사용화대비도로교통법개정방향에관하여연구진이미리작성한문제제기형설문지를발송한다음, 해당전문가들이구체적인근거를포함한응답을하도록하였다. 이와같은방식을취한이유는자율주행자동차관련도로교통법개정방향을논의함에있어서는자율주행기술의발전단계마다상이한결론이나올수있다는점을고려하였기때문이다. 나. 참여한전문가의범위 전문가설문조사에서는자율주행자동차생산 연구등분야에서실제로활동하고있는직 업상의전문가 8명이참가하였다. 이전문가들의직업그룹을분류하면다음과같다. 연번 직업그룹 전문가 소속 1 A LB소프트 2 자율주행자동차시험주행분야 B 한성대정보시스템공학과 3 C 도로교통공단자동차연구원 4 D 아주대교통시스템공학과 5 지능형교통시스템분야 E 아주대교통시스템공학과 6 F 도로교통공단 7 G 경찰청도로교통법분야 8 H 교통안전공단 * 전문가성명은인격권보호를위해편의상알파벳으로표시하였음 다. 전문가설문조사실시기간 전문가설문조사는 ( 월 ) 부터 15( 토 ) 까지 5 일간실시하였다. 102
113 3. 주요설문내용전문가설문조사에서다루어질주요설문내용에관하여연구진은추상적관점에서자율주행자동차가상용화될경우도로교통법의규제를완화해야하거나새로운규제를신설해야할쟁점들로선정하였다. 도로교통법의편제에따른관련쟁점은다음과같다. 가. 운전자및고용주등의의무 도로교통법제 4 장은운전자및고용주등의의무를규정하고있다. 이중에서자율주행자 동차가실제로도입될경우그규제완화가검토될수있는설문사항으로는다음과같다. < 자율주행자동차도입시도로교통법상운전자의의무등관련규제완화쟁점 > (1) 무면허운전등의금지 ( 제43조 ) (2) 술에취한상태에서의운전금지 ( 제44조 ) (3) 과로한때의운전금지 ( 제45조 ) (4) 운전중휴대용전화사용금지 ( 제49조제1항제10호 ) (5) 운전중영상표시장치에영상표시금지 ( 제49조제1항제11호 ) (6) 운전중영상표시장치조작금지 ( 제49조제1항제11의2 호 ) (7) 운전시좌석안전띠부착의무 ( 제50조 ) (8) 사고발생시의조치의무 ( 제54조 ) (9) 고속도로등운행자동차의모든운전자및동승자의좌석안전띠부착의무 ( 제67조 ) 나. 운전면허자율주행자동차가현실적으로도입되는경우자율주행자동차의주행을위한운전면허가필요한것인지도쟁점사항이다. 구체적인설문사항으로는 자동차등을운전하려는사람의운전면허취득의무 ( 제80조 ) 이다. 즉, 자율주행자동차를이용하고자하는사람도자율주행자동차와관련한면허를발급받아야하는지가설문내용이다. 물론운전면허관련설문은앞에서언급한 운전자및고용주등의의무 중무면허운전등의금지와직접관련되어있다. 다. 자율주행자동차도입시규제사항자율주행자동차가상용화되는경우에는그에따른도로교통법상의규제완화뿐만아니라자율주행자동차특유의위험등을회피하기위한운전자내지조작자의주의의무도문제될수있다. 이와관련한설문사항은다음과같다. 103
114 < 자율주행자동차도입시도로교통법상운전자또는조작자의주의의무규정신설쟁점 > (1) 특정한시간, 장소, 상황에따라자율주행기능의사용을금지할필요가있는지여부 (2) 시스템결함으로인한비정상적상황을인식한경우운전자또는조작자의개입의무인정여부 (3) 운전자또는조작자의자율주행자동차의자동차내착석위치를운전석으로해야하는지여부 (4) 운전자또는조작자의자율주행자동차안전작동에대한모니터링의무인정여부 4. 설문사항별전문가설문조사의결과 이상의설문문항에따라전문가설문조사를실시한결과를설문사항별로제시하면다음과 같다. 가. 운전자및고용주등의의무에관하여 (1) 술에취한상태에서의운전금지 ( 제44조 ) 관련 Level 3의자율주행자동차가상용화될경우음주상태에서자율주행자동차를주행또는운행의음주운전은금지되어야한다는의견이대부분이었다 (7명). 전문가들이설시한이유를보면다음과같다. 1 Level 3은은운전자역할이완전히배제되는단계가아니므로, 당연히음주운전이금지되어야함은이견이없으며, 자율주행자동차의동승자라고해도운전자의음주운전을방조한경우에는현행법규처럼일부형사책임이부과될수있다 (G). 2 특정한상황에서는운전자모드로운행하여야하므로음주운전은금지하는것이타당하다 (E). 3 Level 3의경우운전자의책임하에기능이사용되며항상운전자가운전할수있는상태이어야한다 (B). 4 미국 NHTSA( 도로교통안전청 ) 기준에따르면, Level 3의경우자율주행운전중에도특정상황발생시운전자가대응하여운전하도록되어있으며, 따라서음주운전은금지되어야할것으로판단된다 (C). 5 Level 3은자율주행이가능한조건이충족되는경우에만시스템이운전할수있어그외의경우운전자가운전을해야만한다 (F). 6 수동개입이언제라도가능해야하기때문이다 (D). 7 불시의긴급상황발생시운전자제어필요상황에서대처할수없다 (H). 104
115 한편, 음주상태하에서도자율주행자동차를이용할수있도록해야한다는견해 (1명) 도있었다 (1명). 그이유에대해서는자율주행자동차의음주운전의경우현재관리되는형태와는조금다른형태로되어야할것으로판단되며, 자율주행만을사용하는경우에는어느정도음주상태에서완화되는부분도필요하기때문이라고한다 (A). 다만, 이견해도자율주행자동차가운전자모드로운전되는경우에는음주운전이엄격하게금지되어야한다는점을강조한다. (2) 과로한때의운전금지 ( 제45조 ) 관련자율주행자동차가상용화되어도과로한때의운전금지를규정한도로교통법제45조는존치되어야한다는의견이대부분이었다 (7명). 개별적인이유는다음과같다. 1 과로 질병 약물로인해적절한시점에경보를인지하고수동조작을어렵게할우려가있기때문에음주운전또는과로등금지조항은기술수준의발전과더불어 Level 4 로접어들시기에본격적으로논의가필요한부분이다 (G). 2 Level 3의경우운전자모드가있으므로자동차조작에관한기술을가지고있어야한다 (E). 3 Level 3의경우운전자의책임하에기능이사용되며항상운전자가운전할수있는상태이어야한다 (B). 4 Level 3의경우운전자모드에서는사람이직접운전해야하므로상기조항은존치되어야할것으로판단된다 (C). 5 Level 3은특정조건이충족할때만자율주행이가능한기술로운전자는주행중언제든운전이가능하여야한다 (F). 6 Level 3은수동개입이언제든지필요하므로존치됨이당연하다 (D). 7 불시의긴급상황발생시운전자제어필요상황에서대처할수없게된다 (H). 이에반해수동주행과자율주행을구별하여그허용여부를판단하는견해 (1명) 도있었다. 이에의하면, 과로 질병등의경우에는운전자모드로는사용하지못하지만, 자율주행을하는경우에는이를허용하되위급상황등에대해서허용하는등의형태로바꾸어야한다는견해였다 (A). (3) 운전중휴대용전화사용금지 ( 제49조제1항제10호 ) 관련운전중휴대용전화사용금지에관해서는현행법과같이휴대폰사용이금지되어야한다는견해 (1명), 휴대폰사용이허용되어야한다는견해 (3명), 자율주행모드에서는휴대폰사용이허용되어야하지만운전자모드에서는휴대폰사용을금지되어야한다는견해 (4명) 등다양한의견이제시되었다. 105
116 휴대폰사용이금지되어야한다는견해의근거는, Level 3에서는긴급상황발생시수동모드로전환및응급대처가필요하므로골든타임확보차원에서완전히눈이자유로워지는 Level 4 이전단계까지는현행법규를보수적으로해석해야하고, 수동운전으로전환이후에는현행법규상황과동일하므로휴대폰사용이금지되어야한다고판단하였다 (G). 자율주행자동차의주행중에는휴대폰사용이허용되어야한다는견해의근거는다음과같다. 1 Level 3의자율주행자동차의목적및기능을고려할때, 운전중휴대폰사용은허용이가능할것으로판단된다 (C). 2 Level 3의자율주행중에운전자는모니터링의무가없으며, 휴대폰사용을허가해야하고, 운전자는시스템이자율주행을더이상하지못하는경우시스템의제어권전환의요구에대응하면된다 (F). 3 휴대폰을사용하더라도인지정상상태시운행이가능하다 (H). 자율주행모드에서는휴대폰을사용할수있도록하되, 운전자모드에서는휴대폰사용을금지해야한다는견해의근거는다음과같다. 1 휴대폰사용에관한규정은조금완화되어도무방하다고생각된다 (E). 2 자율주행모드에서는안정성을보장받을수있는조건이기때문에휴대폰사용을허용하고, 운전자모드는현재와동일한조건이기때문에이를금지해야한다 (A). 3 긴급상황시운전할수있는상태는유지되어야한다 (B). 4 상식선에서판단할때자율주행모드에서는휴대폰을사용하도록하는것이타당하다 (D). (4) 운전중영상표시금지 ( 제49조제1항제11호 ) 및영상표시장치조작금지관련운전중영상표시장치에영상표시금지및운전중영상표시장치조작금지와관련하여, 대부분의견해 (6명) 는자율주행모드에서는영상표시장치에영상을표시할수있고영상표시장치도조작할수있도록하되, 운전자모드에서는모두금지해야한다는입장을취하고있었다. 개별적인근거는다음과같다. 1 자율주행모드에서는운전자의개입없이안전하게운행이가능하게한다는전제하에영상표시장치를허용하는것도검토할수있다 (E). 2 자율주행모드에서는운전자의특별한조작이없기때문에영상을볼수있도록하고, 운전자모드에서는현재와동일하게운전자가운전하기때문에안전을위해서영상이금지되어야한다 (A). 3 자율주행모드에서는영상표시장치에영상을표시할수있고영상표시장치도조작할수있도록하되, 운전자모드에서는모두금지해야하는것이 Level 3의자율주행을사용하는이유이기때문이다 (B). 4 자율주행자동차 (Level 3) 의목적및기능을고려할때, 운전중영상표시장치조작등은허용이가능할것이나, 운전자모드에서는기존과같이영상장치의조작을금지하는것 106
117 이적절할것이다 (C). 5 레벨 3의자율주행중에운전자는모니터링의무가없으므로휴대폰사용을허가해야하며, 운전자는시스템이자율주행을더이상하지못하는경우시스템의제어권전환의요구에대응하면된다 (F). 6 자율주행모드시에는행동이자유롭기때문에영상표시장치에영상을표시할수있고영상표시장치도조작할수있도록하는것이타당하다 (D). 그러나자율주행자동차의주행중에도여전히영상표시장치에영상표시를금지해야하고, 운전중영상표시장치조작도금지되어야한다는견해 (1명) 도있었다. 그근거로는, 자율주행기술의발전에따라운전자역할이축소되어운전자들의휴대폰또는영상표시장치사용은점차늘어날것이분명하지만, Level 4 이전의단계까지는교통안전의중요성으로인해이를허용하기쉽지않기때문이라는것이었다 (G). 또한자율주행자동차의주행중에는영상표시장치에영상표시가허용되어야하고, 운전중영상표시장치조작도허용되어야한다는견해 (1명) 도있었다. 이견해의근거는영상장치를시청하더라도인지정상상태시운행이가능하기때문이라는것이었다 (H). (5) 좌석안전띠부착의무 ( 제50조, 제67조 ) 관련운전시좌석안전띠부착의무및고속도로등운행자동차의모든운전자및동승자의좌석안전띠부착의무와관련하여, 설문에응한 8명의전문가전원이자율주행자동차의주행중에도모두좌석안전띠를부착해야한다는견해를취하였다. 그근거를제시하면다음과같다. 1 교통사고의최후의보루는 안전띠 이고, 자율주행차량도사고위험성이상존하는이상, 당연히운전중인차량에탑승한사람은운전자이든동승자이든모두안전띠착용을의무화해야한다 (G). 2 안전이최우선이므로안전띠부착이필요하다 (E). 3 사고시안전띠는생명과직결되기때문에다른부분은사고를낼수있거나없거나의판단이지만, 안전띠는사고가나는경우에보호수단이기때문에자율주행과관계없이부착해야한다 (A). 4 사고시대비를위해항상안전벨트는의무화해야한다 (B). 5 Level 3의자율주행모드에서도돌발상황발생시탑승객들안전에위해요소가있으므로, 좌석안전띠를부착할필요가있을것으로사료된다 (C). 6 Level 3의자율주행중이라하더라도사고가발생할수있고, 안전띠는사고시피해감소를위한제1의안전장치로반드시필요하다 (F). 7 자율주행시에도사고가발생할수있으므로모든경우에안전띠를부착해야한다 (D). 107
118 8 비자율차와의추돌시피해를최소화하기위해서라도안전띠를부착해야한다 (H). (6) 교통사고발생시책임주체관련교통사고발생시의책임주체에관해서는, 사고발생시제조사의책임을원칙으로하되제조사가운전자의과실을입증하는경우에한해운전자에게책임을묻는방식이타당하다는견해에서부터 Level 3에서는운전에대한책임은운전자에더많이있는반면 Level 4에서는제조사의책임이크다는견해에이르기까지다양한의견이제시되었다. 개별적인내용은다음과같다. 1 일반형사사범과달리교통사고사범은고의범이아닌과실범이라는데큰차이가있으며, 사회상규상부여되는주의의무위반에대한책임을묻는것이핵심인데, 현실적으로제조사의책임을인정할수있는경우가얼마나될지는의문이며 ( 마치의료과실을일반인이입증하기가어려운것과유사한구조 ), 따라서이런경우는 입증책임전환 의법리로해결해야한다. 즉, 사고발생시제조사의책임을원칙으로하되, 예외적으로제조사가운전자의과실을입증하는경우에한해운전자에게책임을묻는방식이타당하다. 사실, 교통사고시책임문제는다소복잡한문제라고할수있다. 자율차의장치적결함을운전자가책임지는일이없어야하는반면, 과도한제조사의책임전가는자율주행차개발ㆍ보급에큰걸림돌이될것이기때문이다. 이경우운전자의주의의무를규정하고있는도로교통법상의운전자준수사항정의가매우중요하고, 제조사의입증책임전환규정신설로보완하는방안이타당하다고생각한다 (G). 2 사고원인제공자가책임을지는것이옳다 (E). 3 자율주행은운전자의운전과는관계없기때문에제조사의책임이더크다고할수있다. 물론충분한조작법등에대해서습득하고있어야한다. 그리고운전자모드에서는운전자의미숙이나조작에의해서차가움직이는것이때문에운전자에게책임을묻는것이타당하다 (A). 4 Level 3까지자율주행자동차에의한교통사고발생시그책임은운전자에게있다 (B). 5 자율주행자동차에의한교통사고발생시그책임부담에관해서는더깊은논의가필요하다고생각되지만, Level 3은돌발상황시단시간 ( 약 20초이내 ) 에운전자가대응을하도록되어있으므로 Level 3에서는운전에대한책임은운전자에더많이있는반면, Level 4에서는제조사의책임이크다고사료된다 (C). 6 교통사고의발생원인에따라사고의책임이정해져야하며, 대부분의경우자율주행모드에서사고가발생한경우에는제조사가책임을지고, 운전자모드에서사고가발생한경우에는운전자가책임을져야하겠지만반드시그렇다고단정할수없다 (F). 108
119 7 자율주행시사고는차량결함이므로제조사가책임이있으나교통사고조사시인프라의의한것인지도규명이필요하다. 만약인프라일경우에는정부의책임이있다 (D). 8 자율주행모드에서사고가발생한경우에는제조사가책임을지고, 운전자모드에서사고가발생한경우에는운전자가책임을져야한다 (H). 나. 자율주행자동차관련면허취득여부 ( 제43조, 제80조 ) 관련무면허운전등의금지및자동차등을운전하려는사람의운전면허취득의무와관련하여 Level 3의자율주행자동차가상용화될경우자율주행자동차를이용하고자하는사람이자율주행자동차의주행또는운행에필요한면허를취득할필요가있다는견해가우세하였다 (6 명 ). 그개별적인근거는다음과같다. 1 Level 3은기존수동운전자모드이외에자율주행모드가추가되는만큼돌발상황시대처요령등에대한차별화된운전지식 운전기능이반드시필요하다고생각되며, 이는단순히자동차제조사에서배포되는조작매뉴얼이상의교육이요구되며, 전문교육기관에서의교육이수가그방법이될수있을것이다. 다만, 국가가발급하는운전면허로포함시킬것인지, 아니면누구나이수하여야하는의무교육으로할것인지는정책적으로판단해야할사안임. 아무래도산업발전촉진및국민부담 ( 규제 ) 경감쪽에중요도가강조된다면의무교육이수쪽이더욱설득력이있을것으로예상된다. 다만, 그교육내용은단순한학과교육이아닌실제체험교육의형식으로과정이편성되어야하며, 단순이수가아닌평가내지는검증단계가또한반드시필요하다고보므로장기적으로는자율주행자동차사고로인한교통안전에대한목소리가커지면서평가과정이보다엄격해져별도의운전면허로발전될것으로전망된다 (G). 2 운전자모드가있으므로자동차조작에관한기술을가지고있어야한다 (E). 3 Level 3은자율주행이가능한조건이충족되는경우에만시스템이운전할수있다. 그외의경우운전자가운전을해야한다 (F). 4 자율주행자동차는기존자동차와기능이다르므로면허취득이별도로필요하다 (D). 5 기본적기기작동방법의숙지가필요하다 (H). 6 Level 3의경우특정상황에서사람이자율주행자동차를운전하여야되며, 따라서기존의자동차운전면허를가진사람이운전석에앉아있어야한다. 기존연구결과 ( 자율주행기술상용화에대비한도로교통공단발전전략수립연구, ) 를바탕으로한, Level 3(1단계 ), Level 3(2단계 ) 의단계별운전면허제도개선방안을제시해보면, 자율주행면허신설및운전면허구분개정방안으로도입시기에따라 1단계, 2단계별로구분하여운전면허부문의개선안을마련하고, 1단계부분자율주행도입시기에는부분자 109
120 율주행차를주행하기위해서는기존일반면허 ( 제1종, 제2종면허 ) 소지자에한하여자율주행교육을진행이가능하도록하되, 부분자율주행시기에맞춰제도마련 (2025 년예상 ) 으로 2단계완전자율주행도입시기에는완전자율주행차만을운전할수있는완전자율주행차전용면허를신설하여운영하도록해야한다. 제1종, 제2종면허와동일한수준신규면허제도를신설하고, 완전자율주행시기에맞춰 (2035 년예상 ) 제도를마련해야한다 (C). 이에반해 Level 3는 ADAS 이므로별도의자율주행자동차면허를취득할필요가없다는견해 (1명) 도있었다 (B). 또한 Level 3의경우자율주행모드에서는자동차의자동화시스템이작동하기때문에특별한면허가존재할필요가없으나, 자동차면허는운전자모드의경우에꼭필요하기때문에기존의자동차면허를가지고있는사람은별도로자율주행자동차면허를취득할필요가없다견해 (1명) 도있었다 (A). 다. 자율주행자동차도입시규제사항신설관련 (1) 특정한시간 장소 상황에따른자율주행기능사용의금지필요성특정한시간, 장소, 상황에따라자율주행기능의사용을금지할필요가있는지여부와관련하여, 금지할필요가있다는견해 (4명) 와금지할필요가없다는견해 (4명) 로나뉘었다. 금지할필요가있다는견해의근거는다음과같다. 1 상황에따라금지할필요가있다 (E). 2 Level 3은자율주행자동차가부분적으로자율주행이가능한상태를말하며, 시간, 장소, 상황에따라서자율주행기능의사용을금지할필요성이있다 (C). 3 자율주행을하기에는위험한장소는수동개입이타당하다 (D). 4 국가보안등위급시통신제한발생으로금지조치가필요하다 (H). 한편, 금지할필요가없다는견해의근거는다음과같다. 1 일부혼잡지역 기상악화시에는자율모드제한규정을두어야한다는주장이있을수있으나, 자율주행자동차에는 V2X 통신기술의적용으로소통정보가실시간으로수집 제공되고, 카쉐어링의보편화로인한교통량감소등으로인해안전은물론소통까지향상될것이라고전망되는만큼, 운전자의필요에따라자율주행 -수동전환이가능하다면굳이자율주행기능의사용을시간적 장소적으로일부금지하는규정은무의미한규정이될가능성이크다고본다. 다만, 자율주행자동차도입초기에는일반차량과의분리운행이안전성을보장하는데큰효과가있을것이라고생각하므로, 일정기간동안은자율주행자동차만이다닐수있는공간 ( 예 : 전용차로 ) 을보장하고, 수동모드가혼재 110
121 된공간을운행할때는자율주행기능을금지하는것에는찬성할수있다 (G). 2 충분히안전성을확보한상태에서차량이출시되는상황이라고판단되기때문에금지할필요는없다고판단된다. 단, 자율주행에사용되는맵등은항상최신성을유지할수있도록하는규정이필요하다 (A). 3 Level 3의기능적정의에따라특정상황 환경에서만허용되기때문에금지할필요가없다 (B). 4 자율주행의기술은 Level 3에서도여러단계로발전할것이며, 법에서강제할사항이아니다 (F). (2) 시스템결함으로인한비정상적상황인식시운전자의개입의무인정여부시스템결함으로인한비정상적상황을인식한경우운전자또는조작자의개입의무와관련하여, 이경우에는운전자또는조작자의개입의무를도로교통법에규정해야한다는견해 (5명) 가많았다. 개별적인근거는다음과같다. 1 자율주행자동차에대비한도로교통법개정시운전자의준수사항으로제일먼저고려되어야할규정이라고생각한다. 돌발상황시운전자조작의무가없다면, 모든사고의경우를제조사책임으로인정할수밖에없을것이기때문이며, 일부이를악용하는보험사기운전자도우려되기때문이다. 다만, 복잡하고다양한상황을빠짐없이고려하여완벽한운전자준수사항을입법할수있을지는미지수이며, 교통사고유형이나판례를통해지속적으로입법을보완해나가야할부분이라고생각된다 (G). 2 미국 NHTSA( 도로교통안전청 ) 기준에따르면, Level 3의경우운전자가특정상황발생시약 20초이내에대응하도록되어있으며, 따라서이러한내용들이관련법규에반영되어야할것으로판단된다 (C). 3 Level 3의기술은조건이충족될경우에자율주행이가능한기술로시스템이자율주행이불가한조건이발생하면, 시스템은운전자에게제어권을가지도록요청해야하고, 운전자는이에대응해야하며, 다만, 이러한제어권전환에는적절한절차를강제할필요가있다 (F). 4 사고를예방하기위한필수조처이다 (D). 5 비자율주행자동차의충돌시피해최소화를위한조작이필요하다 (H). 이에반해운전자또는조작자의개입의무를도로교통법에규정할필요가없다는견해 (3 명 ) 의개별적인근거는다음과같다. 1 상황에따라운전자가인식할수없는경우가있을수있다 (E). 2 자율주행시스템의상용화는안전성을바탕으로이루어져야하는것이기반이라고생각 111
122 되어, 당연히결함의경우에는운전자가조작자의개입이필요한상황이지만, 도로교통법에규정해야하는부분은법상으로사고가발생하는경우에대해서논란의소지를제공할수있을것으로판단된다 (A). 3 Level 3은운전자의전적인책임을전제하므로별도의규정을둘필요는없다 (B). (3) 운전자또는조작자의자율주행자동차내착석위치운전자또는조작자의자율주행자동차의자동차내착석위치를운전석으로해야하는지여부와관련하여, 이를긍정하는견해 (7명) 가압도적으로우세하였다. 그근거는다음과같다. 1 긴급상황에서의운전자개입이필요한단계이므로신속한조치를위해운전석에의착석의무부과는필요하다고보며, 뒷좌석에앉아있거나좌석을회전시켜뒷좌석의동승자와이야기를할수있다면신속한상황판단에따른수동조작전환은불가능하다고생각된다 (G). 2 운전자개입이필요한경우가항시발생할수있다 (E). 3 응급상황시운전할수있는상태는유지되어야한다 (B). 4 Level 3의경우, 자율주행자동차가자율주행모드로운행중에특정상황발생시단시간 ( 약 20초이내 ) 에사람이운전할수있는상태가되어야한다 (C). 5 시스템의제어권전환요구에대응해야한다 (F). 6 항상수동개입을대비해야한다 (D). 7 비자율차의충돌시피해최소화를위한조작이필요하다 (H). 이에반해운전자또는조작자의자율주행자동차의자동차내착석위치를운전석으로할필요가없다는견해 (1명) 는자율주행모드에서는운전석에꼭착석할필요는없다고판단되지만, 비정상적인상황이인식되는경우에차량을멈추거나조작할수있는부분이다른좌석 ( 뒷자석등 ) 에도있어야한다는점을그근거로제시하였다 (A). 이견해는비정상적상황이인식되는경우차량을조작할수있는장치가다른좌석에있을것으로전제로운전자또는조작자의착석위치를운전석으로국한할필요가없다는의견이므로결과적으로는운전석에착석할필요가있다는다수견해와그맥락을같이하는것이다. (4) 운전자의모니터링의무운전자또는조작자의자율주행자동차안전작동에대한모니터링의무인정여부와관련하여, 자율주행모드에서는항상모니터링해야하지만운전자모드에서는모니터링이필요없다는견해 (4명), 항상모니터링해야한다는견해 (2명), 모니터링하지않아도된다는견해 (2명) 등으로나누어졌다. 112
123 자율주행모드에서는항상모니터링해야하지만운전자모드에서는모니터링이필요없다는견해의근거로는, 1 자율주행의경우어떠한형태로든안전작동에대한모니터링은있어야하지만, 운전자모드의경우에는실제운전을운전자가하기때문에모니터링이필요하지않다는점 (A), 2 Level 3은운전자의책임하에운행되므로모니터링이필요하지않다는점 (B), 3 Level 3의경우자율주행모드에서는가끔모니터링하면되고, 운전자모드에서는일반자동차운행과동일한상태라는점 (C), 4 자율주행모드에서는항상모니터링해야하지만, 운전자모드에서는모니터링이필요없다는점 (H) 등이제시되었다. 항상모니터링해야한다는견해의근거로는, 1 자동차의 모든 기능이정상적으로작동되고있는지여부에대한판단을운전자에게전적으로의존시키기에는한계가있기때문에자율주행자동차의안전작동에대한모니터링의범위를어떻게보느냐에따라달리평가될수있는데, 차량의안전작동여부에대한확인은운전자보다는제조사의부담이더큰부분을차지하도록입법되어야하고, 이경우경고기능은기계적으로해결해야하고, 운전자는현존하고명백한위험에대하여경고음이울렸음에도이를인지하지못하고적절한조치를못한경우로한정해야하며, 센서등의오류까지운전자책임으로볼수는없다는점 (G), 2 어떠한상황에서도안전이최우선이므로항시모니터링이필요하다는점 (D) 등이제시되었다. 모니터링하지않아도된다는견해의근거로는, 1 자율주행모드를신뢰해야한다는점 (E), 2 Level 3의기술은자율주행중에운전자의모니터링의무가없는모드라는점 (F) 이제시되었다. (5) 기타자율주행자동차도입시규제사항의신설그밖에자율주행자동차도입시규제사항의신설에관한전문가의의견은다음과같다. 1 자율주행자동차확산에따라교통사고조사분야의큰변화가예상된다. 즉, 기존교통사고의주요요인이운전자의과실에기인했다면, 향후에는차량적요인이대폭증가할것으로전망되고있으며, 이는앞서운전자와제조사중어느쪽에보다큰책임을물어야할것인지와도연관되어있다. 따라서자율주행자동차에는차량의주행상태를모두체크하여저장해두는장치 ( 예를들면, 카메라 EDR 등 ) 의장착및기록정보공개를의무화해야명확한사고조사가가능하고, 만일이를임의적으로조작하는것을금지하는규제강화가반드시필요할것으로판단된다 (G). 2 자율주행자동차는안전과편안함을기반으로진행되어야하므로교통사고율을최소한으로줄이고, 운전자에게차량안의안전성및안락성을제공하기위해서는도로교통상의규제완화가어느정도필수요소로생각되지만, 사고발생시탑승자의안전을위해서 113
124 는안전벨트등의사고시안전을확보하는부분은현행에서진행하는것과같이규제를엄격히적용해야한다 (A). 3 자율주행자동차사고시책임을명확히규정할필요가있으며, 자동모드의사고원인규명을위한블랙박스및자료제공을의무화해야한다 (B). 4 자율주행자동차가주행하는지역에는잘못설치된교통시설물들등으로인한교통사고발생을방지하기위하여도로구간에교통안전시설물등이정확히설치되었는지를평가해주는교통안전진단제도등의도입이필요할것으로판단된다 (C). 5 완전자율주행자동차에대한시범운행을허용하는검토가필요하다 (F). 6 자동차운전면허제도개선, 사고조사방법개선, 자율주행자동차성능검사대폭강화, 윤리적문제 ( 인공지능등 ), 인프라문제등포괄적으로검토가필요하다 (D). 7 자율주행자동차운전자에대한보험혜택을부여해야한다 (H). 제 4 절자율주행자동차상용화대비도로교통법개정방향 앞의제2절에서서술한내용은자율주행자동차가상용화될경우를대비한도로교통법개정방향에관한전문가의의견을제시한것이다. 이를참고로하여본절에서는규범적관점에서자율주행자동차사용화대비도로교통법개정방향및자율주행자동차관련교통사고등에대한법적 제도적문제점에관한논의를전개할것이다. 1. 논의의출발점자율주행자동차상용화대비도로교통법개정방향과자율주행자동차관련교통사고에관한법적 제도적방안을논의하기에앞에서이연구가전제로하고있는자율주행기술의발전단계를확정할필요가있다. 도대체자율주행기술의어느단계에서그에부합하는도로교통법을개정해야하고, 나아가자율주행자동차관련교통사고에관한법적 제도적방안을수립해야할것인지먼저확정되어있어야하기때문이다. 이미언급한바와같이미국도로교통안전청 (NHTSA) 의 5단계에의한자율주행기술발전단계중현재자율주행자동차사용화기술은 Level 2까지는일부상용화가진행중이며, Level 3을목표로기술을발전시켜나가고있다. Level 2에서는운전자가모든운행과정에서모니터링을해야한다는점에서현재의도로교통법이나교통사고를전제로하는형법과특별형법이그대로적용된다. 한편, 자율주행기술의 Level 4에도달하는경우에는지금까지와는완전히다른법체계로변화되어야한다. Level 4는오로지자율주행시스템에의한자율주행자동차의주행을내용으로하기때문이다. 따라서 Level 4에서는자율주행자동차의주행과관 114
125 련한도로교통법의규제체계가전면적으로개정되어야할뿐만아니라자율주행자동차에의한교통사고가발생한경우에도이경우에는로봇으로불리우는시스템에의하여주행되기때문에그차량에탑승해있는조작자내지탑승자에게형사책임을물을수는없고, 다만, 형법상제조물책임을물을수있을뿐인데, 이문제는다시금형법의일반원칙으로서법인의형사책임여부가검토되어야한다. 어쨌든 Level 4에도달하는경우에는자율주행자동차의교통사고에대한법적문제가민사법으로이전되는결과를초래하게될것이다. 보다본질적인문제는대부분의국가에서상용화의목표로삼고있는 Level 3이다. Level 3에서는조향장치, 엑셀레이터및브레이크등을모두자율주행시스템이조작하고, 다만시스템의요청이있는경우에만운전자가대응하는것을예정하고있다. Level 3에서의자율주행자동차는마치항공기의자동조종과유사한것이다. 따라서자율주행모드와운전자모드가병존하는자율주행기술발전의 Level 3에서는자율주행자동차에탑승하고있는운전자등의이동의편의를위하여현행도로교통법상의규제를완화내지폐지해야할것인지현실적으로문제될수있다. Level 3은완전자율주행을의미하는것이아니고, 따라서운전자에게도로교통에필요한모니터링의의무가있다고볼수있기때문이다. 그러나자율주행기술의 Level 3에서도로교통법상운전자의의무나준수사항등을완화내지폐지하고자하는경우에도, 도로교통법의상위에있는국제규범인도로교통에관한제네바협약의규범내용을고려해서그규제완화등의여부를판단해야할것이다. 따라서이연구에서는자율주행기술의발전목표를 Level 3로설정하여자율주행자동차의상용화에대비한도로교통법개정방향과교통사고시법적책임의주체나사고처리의문제를주로논의할것이다. 2. 도로교통법상자율주행자동차관련개념정의필요성가. 현행도로교통법상운전자의해석현행도로교통법은모범운전자등 운전자 의개념을명시하고있기는하지만 운전자 의개념내용이무엇인지는명시적으로규정하지않고있다. 그러나도로교통법제2조제 26호이 운전 에대한개념정의를 도로에서차마를그본래의사용방법에따라사용하는것 ( 조종포함 ) 으로개념정의하고있고, 대법원도 시동을걸고핸들이나가속기또는브레이크등을손이나발로다루어일정한방향과속도로움직이게하여발진하거나적어도발진조작을완료하는것을가리키는것 80) 이라고판시하고있는점에주목해보면현행도로교통법은사람인운전자에의한발진조작을전제로하지않는자율주행자동차를포착하지못하고있는것이다. 이러한의미에서보면, Level 3에있는자율주행자동차에탑재된자율 80) 대법원 선고 98 다 판결 115
126 주행시스템모드를운전자개념에포함시킬실익이있어보인다. 현행도로교통법에의하면자율주행모드로주행중인경우에는사람에의한운전이아니기때문에자율주행모드도운전자에포함시킴으로써전체적인주행과정에대하여도로교통법에의한도로교통의안전을확보할필요성이있어보이기때문이다. 나. 제네바협약개정안제8조제6항의규정내용그러나제네바협약개정안제8조제6항에서도자율주행시스템모드를운전자개념에포함시키지않고있다. 제네바협약개정안제8조제1항부터제5항까지는차량에는운전자가있어야하고, 운전자는항상차량을조종할수있고동물을안내할수있어야할것을규정하고있다. 그런데자율주행자동차의도입에따른제네바협약의개정안 ( 제8조제6항 ) 에의하면, 차량의주행에영향을주는차량시스템이차량, 차량장비및차량에정착하거나사용할수있는부품과관련하여국제적법기준에따른설계, 장착및이용을위한조건에부합하는경우에는제8조제5항에부합하는것으로보고 ( 제6항제1문 ), 차량의운행에영향을주는차량시스템이앞에서언급한국제적법기준에따른설계, 장착및이용을위한조건에부합하지않지만당해차량시스템이운전자에의해제어또는차단될수있는경우에도제8조제5항에부합하는것으로본다 ( 제6항제2문 ) 고규정하고있다. 즉, 제네바협약개정안은자율주행시스템이운전자의판단을매개함이없이독자적으로교통안전을실현할수있는지의여부가완전히해소되지않고있으므로차량의운행에있어서교통의안전을위하여시스템의차단을포함하여적절하게차량을제어하려고하는운전자의의사를중시한종래의법제도를유지할수밖에없다는이해에토대를두고있다. 국제적기준에비추어보면자율주행시스템모드를운전자로개념정의할필요성은적어보인다. 다. 자율주행시스템모드를운전자개념에포함시킬것인지여부자율주행기술의발전단계로서 Level 3의특징은자율주행자동차가자율주행시스템에의하여주행하지만시스템이요청하는경우에는운전자가시스템을제어해야한다는점이다. 즉, Level 3은자연인인사람에의한차의지배를전제로하고있다. 도로교통에관한제네바협약의개정안제8조제6항제2문도당해차량시스템이운전자에의해제어또는차단될수있는경우에는사람에의한운행지배와동일한것으로보고있다. 따라서자율주행모드와운전자모드가병존하는 Level 3에서도자연인인운전자는전체적으로차에대한운행지배를하고있는것으로평가해야한다. 만약그렇지않고도로교통법에별도로자율주행시스템모드를운전자개념에포함시키는경우에는 Level 4에서문제되어야할법적문제점 ( 교통사고발생시책임주체문제등 ) 을미리앞당겨서처리하게되는결과를초래할수있다. 예컨대완 116
127 전자율주행단계가아닌 Level 3에있는자율주행차량이시스템모드로주행중에사고가발생한경우운전자인자율주행시스템모드가 - 구체적으로는제조업체등이 - 교통사고에대한책임을부담하게되는반면, 자연인인운전자는책임을부담하지않는다고이해할여지가있게된다. 그러나 Level 3의경우자연인인운전자의과실책임여부에대해서는원칙적으로운전자에게교통사고등의예견가능성및결과회피가능성이있었는가에따라달라진다고보아야한다. 81) 이것은 Level 3의경우여전히자율주행차량에탑승해있는운전자가모니터링을해야한다는것을의미한다. 즉, 당해차량이전체적으로운행중에일정시간동안시스템주행모드로주행되고있다고해도그안에탑승해있는운전자를도로교통법에서말하는 운전자 라고해야하는것이지, 자율주행시스템모드자체를 운전자 개념에포함시켜서는안된다고판단된다. 이점에서 Level 3의자율주행시스템모드를운전자개념에포함시킬필요는없는것으로보인다. 다만, Level 4의완전자율주행자동차또는무인셔틀차가등장하는경우에는 차량의사용자 (Vehicle user) 라는용어를사용할필요가있다. 운전석이없는완전자율주행자동차나무인셔틀의경우에는그차량이나셔틀에탑승한사람은더이상운전자라고볼수없고, 이경우에차량에탑승한자는단순히 차량의사용자 에불과하기때문이다. 또한 Level 4의완전자율주행자동차의경우에는리모트컨트롤장치등을도움으로원격으로전송하여완전자율주행자동차를사용하도록선택한사람도 차량의사용자 에해당하게될것이다. 3. 운전자의의무가. Level 3에서의도로교통법상운전자의무의규율철학과범위 Level 3가 Level 2와구별되는자율주행자동차의가장큰특징은주행기술자체가단편적이지아니하고복합적이라는것이외에도, 사람인운전자의 운전 과자동주행기술의 프로그램실행 이일단선택한후에는각자독자성을유지하지만특정한상황에서필요성판단에따라사람인운전자가 프로그램실행 대체하여개입한다는점이다. < 미국도로교통안전청이분류한 Level 3에서의운전자와자율주행모드의역할 > Level 3는 제한된자동화 (Limited Self-Driving Automation) 단계 로서특정한도로및운행환경에서차량의모든기능을자동적으로제어하는것이가능하고필요에따라운전자가제어기능을수동으로전환할수있는수준을말한다. 현재구글사가개발하고있는자율주행자동차가 Level 3 수준에있는것으로볼수있다. Level 3에서는자율주행자동차가자율 81) 川本哲郞, 自動運轉と刑事法, 한국법학회개최, 2016 년도한 일추계국제학술대회, 자율주행자동차상용화에따른법적제문제, , 81 쪽. 117
128 주행모드를기반으로하지만, 운전자의제어가필요한경우자율주행시스템이운전자에게경보신호제공하여운전자로하여금운전자모드로주행할수있도록예정되어있다. 즉, Level 3에서는자율주행자동차가자율주행모드와운전자모드가혼재된방식을갖추고있다. 따라서 Level 3에서는자율주행모드로주행할경우에는자율주행시스템이주행을하는것이지만, 운전자모드로운전하는경우에는운전자인사람이운전의주체가된다. 따라서 Level 3 이전의단계에서는 자율주행프로그램의실행 관하여도로교통법상관심을두거나이를반영할필요가없었지만, 이제 Level 3 이후의도로교통법의자율주행자동차에대한규율철학은각각독자성을갖는사람의 운전 과 주행프로그램실행 과의관계를명확하게설정해주는것이다. 그결과 Level 3 이전단계에서는기존자율주행기술관련하여자동차, 운전자및환경의관점에서 자동차관리법 혹은 도로법 에만반영하면충분하였다고할수있다. 그러나 Level 3에서는도로운행시준수사항, 도로체계, 시설환경, 책임등의영역에서 (1) 사람의운전, (2) 주행프로그램의실행시독자적인규율을설정해줄필요가있고, (3) 이들영역에서양자의관계를설정해주는규율들이 필요한경우 도로교통법에반영해줄필요가생겼다. 요약하자면도로교통법에서는사람의운전과관련하여새롭게창설할규율, 프로그램실행관련규율사항, 그리고양자의관계설정에대한새로운규율이반영될필요가생긴것이다. 나. 자율주행자동차운행시일반원칙규정의정립 현행도로교통법은제 4 장에서운전자및고용주등의의무를규율하면서제 48 조에서 안 전운전및친환경경제운전의의무 를규정하고있다. 도로교통법제48조 ( 안전운전및친환경경제운전의의무 ) 1 모든차의운전자는차의조향장치 ( 操向裝置 ) 와제동장치, 그밖의장치를정확하게조작하여야하며, 도로의교통상황과차의구조및성능에따라다른사람에게위험과장해를주는속도나방법으로운전하여서는아니된다. 2 모든차의운전자는차를친환경적이고경제적인방법으로운전하여연료소모와탄소배출을줄이도록노력하여야한다. 운전자의안전운전및친환경경제운전에관한의무는도로교통법상운전자에부과하는 가장일반적인의무에관한규정이라고할수있다. 82) 그런데 Level 3 에서는사람운전자와 82) 입법기술상으로는이일반조항적의무규정은제 4 장의맨앞에위치해야하는것이옳다. 왜냐하면도로교통법의주된규율목적이도로교통상의안전확보및사고예방이므로이원칙규정이명실공히도로교통법의일반규정 118
129 자율주행프로그램의실행이독자성을가진채선택될것이므로도로교통법의일반원칙에해당하는이규정에서도자율주행자동차의프로그램에대한명확한의무를부과할필요가있다. 따라서도로교통법상운전자의각종의무에비하면상위의규정인이일반적의무규정은구체화된의무로써해석상 1 차의장치를정확하게조작할의무와 2 다른사람에게위험과장해를주는속도나방법으로운전하지않을의무를들고있는데, 83) 자율주행자동차의자율주행프로그램의실행에대하여그의무내용에따라분명하게규율해주는것이필요하다. 84) 즉, 2의다른사람에게위험과장해를주는속도나방법으로운전하지않을의무는자율주행자동차에대해별도로부과할의무가아니므로논외로하지만, 1의 차의장치를정확하게조작할의무 는자율주행프로그램에대해서도독자적으로부과할필요가있는의무조항에해당한다. 즉이의무의내용이차의조향장치나제동장치등모든장치를정확하게조작함으로써교통의안전성확보를담보하고자부과되는세부의무사항이기때문이다. Level 3 단계에서는사람인운전자가아닌자율주행프로그램의작동에의한주행시사고에대한책임의기초를마련하거나형사처벌혹은행정벌의처분을위하여일종의주의의무의바탕으로서자율주행프로그램의실행시 모든조향장치나제동장치등모든장치가주행상황에따라적절하고정확하게작동하도록설계되고작동되어야한다 는식의규정을둘필요가있다. 다. Level 3의자율주행자동차대비도로교통법상기존운전자의무에대한검토 (1) 무면허운전등의금지 1 현행규정도로교통법은모든운전자에대한의무로써제43조에서는도로운행에있어무면허운전, 즉운전면허를받지아니하거나효력이정지된운전면허로써운전하여서는안된다고규정한다. 그리고무면허운전을금지시키는전제로써같은법제80조는 자동차등을운전하려는사람은지방경찰청장으로부터운전면허를받아야한다 고규정하고있다. 2 자율주행자동차관련운전면허에관한 규정개정논의의범위 의성질을가지고있을뿐만아니라법의해석기준이기도하다. 즉도로교통법의체계적입법과해석을위해서는이규정을명확하게일반규정으로인식하는것은중요한의미를갖는다. 83) 방극봉, 도로교통법해설, 한국법제연구원, 2010, 193 면. 84) 독일의자율주행자동차도입관련교통법규의개선방향도이와유사하다 : 유동훈, 유럽의자율주행차관련법 제도동향, 월간교통 , 한국교통연구원. 119
130 그런데자율주행자동차의운행과관련한면허논의는 Level 0~4 어느단계에서든제43조의무면허금지는별도로개정관련논의는필요치않다. 왜냐하면일반자동차이든혹은몇단계의자율주행자동차에상관없이도로에서해당차량을운행하게하기위해서는어떤형태로든면허의존재가필요하다. 그것이 운전 면허이든혹은 조작 면허이든상관없다. Level 4의완전한주행프로그램이탑재된자율주행자동차라해도이차가도로에서운행하기위해서는조작혹은운행하려는사람에게는일정한면허의존재가필요한것이다. 그렇다면제43조의개정논의는필요치않다고본다. 그에비하여 자동차를운전하려는사람 에대해운전면허의취득을강제하는제80조의규정의취지를이해한다면 Level 3 이상의자율주행자동차를운전하려는사람 에게는그에걸맞는운전면허를취득할필요성이있다는문제제기가가능하다. 즉 Level 3 이상의단계의자율주행자동차의경우, 통상의운전기능에추가하여자율주행시스템의특유의조작혹은작동에대해운전자 / 작동자는그작동법에대해혹은일반적인운전과자율주행간의전환시스템에관하여학습과연습그리고그에관한면허가필요하다는관점에서보면 85) 이를위한도로교통법제80조의규정에대한손질이필요하다. 물론각자율주행자동차제조사나개별차량에따라자율주행시스템의기능과작동방법등이다를수있으므로이를고려하여운전하려는사람들이어떻게이를학습하고훈련을해야할지를고려한규정의개선이필요할것이다. 전술한바와같이전문가설문조사에서도 Level 3의자율주행자동차가상용화될경우운전자 ( 혹은작동자 ) 에대해서는자율주행자동차의운행또는작동에필요한면허를취득할필요가있다는견해를보였다. 특히이와관련하여자율주행자동차의운행또는작동을위한면허를취할것인지아니면조작매뉴얼에대한교육및훈련의이수의무를부과할것인지는정책적판단의문제라는견해는고려할만한의견이다. 생각건대면허취득이아닌의무교육이수를취하는경우에는추후그검증이필요할뿐만아니라사고발생시그책임에대한확실한근거를제시해야한다는점에서운전면허제도를취하는것이바람직하다고판단된다. 3 자율주행자동차의운전면허관련도로교통법상의반영방안자율주행자동차의기능및작동법에대한별도의추가적인학습및훈련과그에관한면허에관련해서는다음과같이반영하는것이가능하다. 첫째, 운전면허의종류 ( 범위 ) 에관한제80조제2항에서제4호를신설하여 자율주행자동차운전면허 를둔다. 이는제1호 ~ 제3호상의제1종면허, 제2종면허, 연습운전면허로구분된각호가자율주행시스템의면허를포섭하지못하기때문이다. 85) 日本能率協會總合硏究所, 自動走行の制度的課題等に關する調査硏究報告書, 2016, 78 쪽. 120
131 둘째, 신체상태또는운전능력에따라행정자치부령으로운전할수있는자동차등의구조를한정하는규정, 즉동법제3항의규정을자율주행자동차의운전면허조건을완화하는형태의개선이필요하다. 셋째, 동법제82조가제1호에서제6호에이르기까지운전면허의결격사유를규정하면서 18 세미만인사람, 정신질환자, 일정한장애인 ( 시각, 청각등신체장애인 ), 일정한약물중독자, 제1종대형면허혹은특수면허의경우 19세미만의 1년미만경력자등을열거하고있다. 그러나 Level 3의자율주행자동차의경우이에대한정책적고려에의한완화가필요하다고판단된다. 예컨대자율주행시스템의작동법과전환방법을숙지하고연습한경우에반드시 18 세미만을배제시킬수없는것이기때문이다. 넷째, 운전면허증의갱신기간과정기적성검사에있어서도현행법제87조는일반적인자동차를전제로하여연령, 신체상태, 운전능력등을고려하여갱신기간과정기적성검사기간을설정하고있는데사회적수용성을고려하여자율주행자동차에있어서는약간의완화된개선이논의될수있다. (2) 술에취한상태에서의운전금지 1 현행규정도로교통법제44조 ( 술에취한상태에서의운전금지 ) 1 누구든지술에취한상태에서자동차등 ( 건설기계관리법 제26조제1항단서에따른건설기계외의건설기계를포함한다. 이하이조, 제45조, 제47조, 제93조제1항제1호부터제4호까지및제148 조의2 에서같다 ) 을운전하여서는아니된다. 2 경찰공무원은교통의안전과위험방지를위하여필요하다고인정하거나제1항을위반하여술에취한상태에서자동차등을운전하였다고인정할만한상당한이유가있는경우에는운전자가술에취하였는지를호흡조사로측정할수있다. 이경우운전자는경찰공무원의측정에응하여야한다. 3 제2항에따른측정결과에불복하는운전자에대하여는그운전자의동의를받아혈액채취등의방법으로다시측정할수있다. 4 제1항에따라운전이금지되는술에취한상태의기준은운전자의혈중알코올농도가 0.05퍼센트이상인경우로한다. 이와같이현행도로교통법은누구든지술에취한상태에서 도로에서의자동차등의운 전 을금지하고있다 86) 는것과음주측정방법및 술에취한상태 의기준을정하고있다. 86) 방극봉, 앞의책 167 면이하 : 여기서의자동차는그범위가상당히넓게정의되고있으며도로에서의운전을조 121
132 따라서 Level 3 에서는이두가지에대한논의가필요하다. 2 Level 3 자율주행자동차도입시입법고려사항우선논의가필요한것은 Level 3에서도현행규정과같은 술에취한상태에서의운전금지 규정을그대로유지한채적용할것인지, 아니면현행의엄격한금지규정을부분적으로완화하는것이필요하다고판단하는경우그완화의범위를어떻게설정할것인지에관한것이다. A 술에취한상태의운전금지조항의유지여부 Level 3의성격은이미필요하다고판단되는경우사람인운전자의개입의무를전제로하고있기때문에원칙적으로술취한상태에서운전금지의무는 Level 3의자율주행자동차에대해서도그대로유지되고적용된다고할것이다. 이미전문가조사결과에서도나타난바와같이 Level 3의자율주행자동차에서는필요한경우언제든지자율주행모드로부터변환되어운전자의개입이예정되어있으므로, 우선운전자모드로변환하는것에대한판단을위해서도술취한상태를허용해서도안될뿐만아니라, 모드전환후운전자가개입하여운전을하게되는상황에서도술취한상태를용인할수는없기때문이다. B 예외규정또는음주측정기준의완화검토그러나기존의자동차로부터상당한정도의기술진보가있는 Level 3의자율주행자동차의운전자에게기존의것과동일한규율을할수는없는것이다. 일정한경우에예외적상황을반영하는것이필요하다. 그첫번째로예컨대특별히자율주행자동차전용도로로설계된구간으로일정한조건하에서자율주행모드만으로운행되는특별한경우에는사람인운전자는단순한동승자로써의역할일뿐이다. 이러한경우예외적으로사람인운전자에대해음주운전금지를의무화할필요는없다. 이러한경우에대해서는자동차관리법등다른관련법에서상당한규율준비를하고있는것과는상관없이도로에서의운전과관련된의무는전혀다른문제이기때문에당연히구체적인예외규정을두는것이마땅하다. 다음으로자율주행모드로부터운전자모드로의전환이소위운전조작의일부로써자동차에대한적극적인운전조작이아닌단순하고도일시적인조작을요하는경우이거나혹은단순 건으로한다. 122
133 하고도일시적인운전자의개입상황인경우 ( 예컨대신호등이작동하지않는경우에있어교 통경찰관의수신호에대응할상황 ) 에는현행의운전자혈중알콜농도 0.05 퍼센트기준의완화 필요성이제기될수있다. (3) 과로 질병 약물운전등의금지 1 현행규정도로교통법제45조 ( 과로한때등의운전금지 ) 자동차등의운전자는제44조에따른술에취한상태외에과로, 질병또는약물 ( 마약, 대마및향정신성의약품과그밖에행정자치부령으로정하는것을말한다. 이하같다 ) 의영향과그밖의사유로정상적으로운전하지못할우려가있는상태에서자동차등을운전하여서는아니된다. 과로한때등의운전금지에관한규정은질병, 약물에의해영향을받은상태등을포괄한것으로써전술한술취한상태의운전금지규정의취지와기본적으로동일한것이다. 그러나술취한상태의운전금지규정에있어서는음주측정을통해그위반여부를검사할수있는방법도있고그위반기준을제시할수있는데비하여약물이나질병등에의하여영향을받은상태의운전에있어서는이를측정할수있는수단도마땅치않을뿐만아니라, 그제재를위한기준도마련하기어렵기때문에술취한상태의운전금지규정과별도의규정을마련한것을볼수있다. 특히이금지의무는사실상그위반으로교통사고가발생하여그원인을밝히는과정에서위반사실이드러날수밖에없는소위의무이행의사전적집행이어려운의무규정에해당한다. 한편도로교통법제45조후단의 그밖의사유로정상적으로운전하지못할우려가있는상태 의운전금지에대한문언은그사유의불명확성과불특정성으로인해금지의무의부과가적절치않은것으로자율주행자동차의도입과상관없이그자체로입법적흠결로판단된다. 다만자율주행자동차관련입법적개선시 그밖의사유 를행정자치부령으로위임하여열거하는것이바람직하다. 2 Level 3 자율주행자동차도입시개정방안자율주행자동차의도입시에도이규정을존치시킬지여부에관한전문가설문조사의답변에서도명확하게드러났듯이 Level 3에서도원칙적으로이의무규정이존재해야하는것은명백하다. 다만술에취한상태의운전금지에서와마찬가지로운전자모드로전환하기전까지혹은자율주행프로그램모드로만작동되는여건에서는이의무에대한예외설정이필요하다 123
134 는반론이제기될수있다. 즉마약을음용한상태등은당연히제외시켜야할것이지만과로한상태의운전자가귀가를위해자율주행전용도로등에서주행모드로운전하는것자체를금지하는것은자율주행자동차의도입에역행하는것이된다. 즉이금지의무를위반한경우에대해서는형사처벌, 행정처분및운전면허의취소등의제재가뒤따르기때문에원칙적금지규정과함께일정한예외를입법적으로고려할필요가있다. Level 3 자율주행자동차의도입과관련해서는다음과같은방식의예외규정을검토할수있다. 즉, 다만과로한상태, 치료목적의약물복용의상태이더라도운전자의운전모드에의한운전이방해받지않을정도라고판단되는때에는그러하지아니하다 는예외규정에따라서예컨대피로한상태의직업운전자나치료목적의약물복용을한운전자가귀가를위해자율주행모드에의한운행을착수하여실행하더라도금지의무를위반하는것은아니다. (4) 운전중휴대폰, 영상표시장치등의사용및작동금지 1 현행규정도로교통법제49조 ( 모든운전자의준수사항등 ) 1 모든차의운전자는다음각호의사항을지켜야한다. 1.~ 9.: 생략 10. 운전자는자동차등의운전중에는휴대용전화 ( 자동차용전화를포함한다 ) 를사용하지아니할것. 다만, 다음각목의어느하나에해당하는경우에는그러하지아니하다. 가. 자동차등이정지하고있는경우나. 긴급자동차를운전하는경우다. 각종범죄및재해신고등긴급한필요가있는경우라. 안전운전에장애를주지아니하는장치로서대통령령으로정하는장치를이용하는경우 11. 자동차등의운전중에는방송등영상물을수신하거나재생하는장치 ( 운전자가휴대하는것을포함하며, 이하 " 영상표시장치 " 라한다 ) 를통하여운전자가운전중볼수있는위치에영상이표시되지아니하도록할것. 다만, 다음각목의어느하나에해당하는경우에는그러하지아니하다. 가. 자동차등이정지하고있는경우나. 자동차등에장착하거나거치하여놓은영상표시장치에다음의영상이표시되는경우 1) 지리안내영상또는교통정보안내영상 2) 국가비상사태 재난상황등긴급한상황을안내하는영상 3) 운전을할때자동차등의좌우또는전후방을볼수있도록도움을주는영상 124
135 11의2. 자동차등의운전중 ( 자동차등이정지하고있는경우는제외한다 ) 에는영상표시장치를조작하지아니할것 12.~13: 생략이하생략 현행운전중금지사항혹은준수사항으로운전중휴대폰 ( 동제10호 ), 영상표시장치의표시및시청금지 ( 동제11호 ), 영상표시장치의조작금지 ( 동제11조의 2) 등을규정하고있다. 특히이를요약하면휴대폰의사용금지, 영상표시장치의시청금지, 그리고영상표시장치의조작금지이다. 이와같은기기의사용금지및조작금지의무는 운전중 에만적용되는의무사항이다. 운전중 의의미는이미도로교통법제2조제26호 87) 에서정의하고있다. 따라서현행법상정의된 운전 에의하면자율주행프로그램에의한운행도운전의개념에포섭되므로앞의 3가지금지의무는그대로적용된다고할수있다. 2 해당금지규정의유지여부의논의앞서의다른금지의무에비하여 Level 3의자율주행자동차도입시휴대폰등사용금지에대한견해는다양한편이다. 이를반영하듯전문가설문조사에서도 8명의의견중 1명은현행의금지규정이그대로유지되어야한다고보고, 3명은휴대폰사용은일반적으로허용되어야한다는견해, 나머지 4명은자율주행모드에서는허용될수있지만운전자모드에서는금지규정이유지되어야한다는견해를밝혔다. 자율주행자동차의출현이유중의하나로서운전자 ( 작동자 ) 의운전이외의편의적활동을도모하기위함이라는관점에서볼때자율주행자동차의도입이후에도운전중휴대전화나기타영상표시장치의사용, 시청, 혹은조작을일반적으로금지한다는것은논리적으로모순이다. 결국운전자의운전이아닌자율주행모드에서는허용하는것이필요하고가능한것인지검토가필요하다. 3 Level 3 자율주행자동차에서의예외적부분허용성생각건대현행법상금지의대상이되는세가지의사항을 Level 3의자율주행자동차의금지사항으로유지할필요는없다고판단된다. 왜냐하면 Level 3의자율주행자동차에서는자율주행시스템에의한운행과필요시운전자에의한운전이모드전환이있기전까지는독립적이고 87) 도로교통법제 2 조제 26 호의용어정의에서 " 운전 " 이란도로 ( 제 44 조 제 45 조 제 54 조제 1 항 제 148 조및제 148 조의 2 의경우에는도로외의곳을포함한다 ) 에서차마를그본래의사용방법에따라사용하는것 ( 조종을포함한다 ) 을말한다. 125
136 완전하게운행되기때문에자율주행모드의운행시까지이러한세가지사항을모두금지할필요는없기때문이다. 특히전술한술취한상태이거나마약복용상태의경우에는차가시동을켜는순간부터그리고주행하는동안의자동차로부터의지시사항에대한인지및판단, 자율주행모드와운전자운전간의전환에대한판단, 그리고종국적으로는전환후의운전자의운전까지곤란하거나위험한것이므로원칙적으로금지되는것이합리적이라고할수있다. 그러나휴대폰혹은영상표시장치의사용혹은조작은술취한경우등과는달리오로지운전자 ( 혹은작동자 ) 가정상적인의식과판단을가지고사용, 시청조작하는것이므로이기기들의사용, 시청, 조작이가능한자율주행모드의운행시에는허용하는것이합리적이라고판단된다. 따라서휴대폰사용금지 ( 제10호 ), 영상표시장치의작동금지 ( 제11호 ), 영상표시장치의조작금지 ( 제11의 2호 ) 에대해서는각호의예외적상황으로각각자율주행프로그램의작동에의한운행시를예외항목으로설정할수있다. 다만 운전 의개념을어떻게설정하여개정할것인지에따라서예외규정의설정방식이달라질수있다. 만일현재전세계적으로논의되고있는것처럼운전을자율주행모드의작동까지포함하는개념으로정의되는경우에는위와같이개별항목에서예외상황을설정하는것이명확한규정방식이다. (5) 좌석안전띠부착의무 1 현행규정도로교통법제50조 ( 특정운전자의준수사항 ) 1 자동차 ( 이륜자동차는제외한다 ) 의운전자는자동차를운전할때에는좌석안전띠를매어야하며, 그옆좌석의동승자에게도좌석안전띠 ( 영유아인경우에는유아보호용장구를장착한후의좌석안전띠를말한다. 이하같다 ) 를매도록하여야한다. 다만, 질병등으로인하여좌석안전띠를매는것이곤란하거나행정자치부령으로정하는사유가있는경우에는그러하지아니하다. 2 자동차 ( 이륜자동차는제외한다 ) 의운전자는그옆좌석외의좌석의동승자에게도좌석안전띠를매도록주의를환기하여야하며, 승용자동차의운전자는영유아가운전자옆좌석외의좌석에승차하는경우에는좌석안전띠를매도록하여야한다. 3~9 생략도로교통법제67조 ( 운전자및동승자의고속도로등에서의준수사항 ) 1 고속도로등을운행하는자동차가운데행정자치부령으로정하는자동차의운전자는제50조제2항에도불구하고모든동승자에게좌석안전띠를매도록하여야한다. 다만, 질병등으로인하여좌석안전띠를매는것이곤란하거나행정자치부령으로정하는사유가 126
137 있는경우에는그러하지아니하다. 현행도로교통법은모든운전자, 그옆자리의동승자, 뒷좌석의영유아동승자및모든고속도로동승자에대해서안전띠부착의무를부과하고, 고속도로외의일반도로에서의뒷자석동승자에대해서는안전띠부착의주의를환기할의무를부과한다. 이는운전자및동승자에대하여사고시손해의예방혹은경감을위한안전및보호의무라고할수있다. 2 자율주행도입관련논의상식적으로본다면자율주행자동차가도입된다고하여안전띠의부착의무가달라져야한다고는생각하지않는다. 그러나현행법에서는모든운전자및그옆자리동승자, 고속도로운전자및모든동승자에대하여안전띠부착의무를하고그위반시 20만원이하의과태료를부과하고있다 ( 도로교통법제160 조제2항제1호 ). 그런데 Level 3의자율주행자동차가자율주행모드로주변기반시설과통신하면서최선의안전운행을하는차안에서운전자혹은동승자가안전띠를매지않고다른활동을할수있어야하는것아닌가하는문제를제기할수있다. 그러나전문가설문조사결과에서는어떤경우에서든안전이최우선이라는관점에서전원이의무조항의유지에찬성하는견해를보였다. 현행법과같이안전띠를부착하지않은경우과태료를부과하는현행법의규정이유지되어야할것인지의문제는어떤안전또는보호장치를잘갖춘자동차인지여부와상관없다. 아무리보호장치를잘갖춘자동차라하더라도사고시인명손해를예방하거나경감할수있는장치가안전띠라는것이증명된경우에는안전띠부착의무는유지되거나강화되어도상관없다. 더구나전술한대부분의의무가소극적인부작위의무인데반하여안전띠의무는적극적인작위의무라는점에서자율주행자동차에있어서도그대로유지되고적용되어야하며현행법의개선이필요치않다고판단된다. 라. 자율주행프로그램작동시신설및전속규율사항 (1) 특정시간, 장소및상황에따른자율주행기능의사용금지 1 논의의배경자율주행모드를제한하거나금지할필요가있는시간, 장소, 상황이도로교통법등에반영될필요가있는가? 예컨대새벽시간이거나국가보안시설내와같이통신제한이가해지는특정한장소, 혹은극심한태풍이나지진과같은비정상적기후나비상상황등의경우에자율주 127
138 행모드로선택되어운행하는것을금지해야하는것아닌가하는질문으로부터출발한다. 하지만이러한의문은 Level 3 이후의자율주행모드에모두해당되는것이기도하지만, 실제에있어서는자율주행프로그램의기술적진보와연관성을갖는것이기도하다. 즉자율주행프로그램의안전관련제어시스템, 혹은자동차가수신하는통신에대한분석과판단을하는프로그램의완전성여부에따라그러한규제의필요성여부가달라진다. 2 전문가설문조사의결과 특정한시간 장소 상황에따른자율주행기능사용의금지필요성특정한시간, 장소, 상황에따라자율주행기능의사용을금지할필요가있는지여부와관련하여금지할필요가있다는견해 (4명) 와금지할필요가없다는견해 (4명) 로나뉘었다. 금지할필요가있다는견해의근거는다음과같다. 1 상황에따라금지할필요가있다 (E). 2 Level 3는자율주행자동차가부분적으로자율주행이가능한상태를말하며, 시간, 장소, 상황에따라서자율주행기능의사용을금지할필요성이있다 (C). 3 자율주행을하기에는위험한장소는수동개입이타당하다 (D). 4 국가보안등위급시통신제한발생으로금지조치가필요하다 (H). 한편, 금지할필요가없다는견해의근거는다음과같다. 1 일부혼잡지역 기상악화시에는자율모드제한규정을두어야한다는주장이있을수있으나, 자율주행자동차에는 V2X 통신기술의적용으로소통정보가실시간으로수집 제공되고, 카쉐어링의보편화로인한교통량감소등으로인해안전은물론소통까지향상될것이라고전망되는만큼, 운전자의필요에따라자율주행 -수동전환이가능하다면굳이자율주행기능의사용을시간적 장소적으로일부금지하는규정은무의미한규정이될가능성이크다고본다. 다만, 자율주행자동차도입초기에는일반차량과의분리운행이안전성을보장하는데큰효과가있을것이라고생각하므로일정기간동안은자율주행자동차만이다닐수있는공간 ( 예 : 전용차로 ) 을보장하고, 수동모드가혼재된공간을운행할때는자율주행기능을금지하는것에는찬성할수있다 (G). 2 충분히안전성을확보한상태에서차량이출시되는상황이라고판단되기때문에금지할필요는없다고판단된다. 단, 자율주행에사용되는맵등은항상최신성을유지할수있도록하는규정이필요하다 (H). 128
139 3 Level 3의기능적정의에따라특정상황 환경에서만허용되기때문에금지할필요가없다 (B). 4 자율주행의기술은 Level 3에서도여러단계로발전할것이며, 법에서강제할사항이아니다 (F). 3 입법반영사항이미언급한바와같이이문제에대한해법은향후자율주행자동차의종합적기술발전속도에따라규제의신설여부도달라질수있다. 전문가들의견해에서도적절하게지적하고있듯이자율주행자동차에는 V2X 통신기술의적용으로소통정보가실시간으로수집 제공되고운전자의필요에따라자율주행 -수동전환이가능하기때문에자율주행기능의사용을시간적 장소적으로일부금지하는규정은실효성이없다고판단된다. 또한장래이와같은비정상적인기후상황, 천재지변혹은일정한보안구역과같은장소에대한자율주행자동차의정보교환능력과판단력및그리고그에대한안전성이확보되어출시되는것을전제로하는것이기때문에이러한우려를해소될것으로보여굳이이러한상황에대비한별도의금지혹은제한규정을둘필요는없다고판단된다. (2) 시스템결함으로인한비정상적상황인식시운전자의개입의무 1 논의의배경 Level 3의자율주행자동차의핵심은차량의내부시스템의판단에의해필요하다고인정하는경우자율주행모드에서운전자가개입하여운행하는것이다. 그런데이렇게판단하는시스템에결함으로인하여비정상적인상황인식이있는경우에사람인운전자의개임의무를규정해야하는것아닌가하는문제가제기된다. 여기에도두가지상황이예측가능하다. 첫째는시스템의결함을스스로인식하여운전자에게개입할것을요구하는경우이다. 이경우에는당연히운전자의개입이있어야하고이때그개입의무를소홀히한경우에는그로인하여발생한사고및손해등에대하여는운전자에게모든책임은아닐지라도그일단의책임을물을수있는근거가마련된다. 둘째는시스템이스스로의결함을인식하지도못하고그로인하여운전자의개입을요청하지도못하는경우이다. 이경우에는운전자가해당시스템결함을스스로인식하고판단해야하는것이 Level 3에서의요구이다. 그렇다면적어도두번째의상황에대비하여적어도시스템결함으로인하여시스템의인식및판단이비정상인상황에대해서는운전자의주체적인상황인식과판단의의무를부과하고그임무를해태한경우에대한책임의일부를물을수있는근거를마련하는것이필요하다. 129
140 2 전문가설문조사의결과 시스템결함으로인한비정상적상황인식시운전자의개입의무신설여부시스템결함으로인한비정상적상황을인식한경우운전자또는조작자의개입의무와관련하여, 이경우에는운전자또는조작자의개입의무를도로교통법에규정해야한다는견해 (5명) 가많았다. 개별적인근거는다음과같다. 1 자율주행자동차에대비한도로교통법개정시운전자의준수사항으로제일먼저고려되어야할규정이라고생각한다. 돌발상황시운전자조작의무가없다면, 모든사고의경우를제조사책임으로인정할수밖에없을것이기때문이며, 일부이를악용하는보험사기운전자도우려되기때문이다. 다만, 복잡하고다양한상황을빠짐없이고려하여완벽한운전자준수사항을입법할수있을지는미지수이며, 교통사고유형이나판례를통해지속적으로입법을보완해나가야할부분이라고생각된다 (G). 2 미국 NHTSA( 도로교통안전청 ) 기준에따르면, Level 3의경우운전자가특정상황발생시약 20초이내에대응하도록되어있으며, 따라서이러한내용들이관련법규에반영되어야할것으로판단된다 (C). 3 Level 3의기술은조건이충족될경우에자율주행이가능한기술로시스템이자율주행이불가한조건이발생하면, 시스템은운전자에게제어권을가지도록요청해야하고, 운전자는이에대응해야하며, 다만, 이러한제어권전환에는적절한절차를강제할필요가있다 (F). 4 사고를예방하기위한필수조처이다 (D). 5 비자율주행자동차의충돌시피해최소화를위한조작이필요하다 (H). 이에반해운전자또는조작자의개입의무를도로교통법에규정할필요가없다는견해 (3 명 ) Level 3에서현재와같이교통사고가발생하는경우일본자동차손해배상보장법등이적용되는데, 원칙적으로같은법제3조에서규정한자기를위한자동차를운행에이용하는자가손해를배상할책임을부담하게되고, 해당자이외의자의책임에대해서는고의또는과실등개별적으로구체적인사정에따라판단해야한다는지적이있다는개별적인근거는다음과같다. 1 상황에따라운전자가인식할수없는경우가있을수있다 (E). 2 자율주행시스템의상용화는안전성을바탕으로이루어져야하는것이기반이라고생각되어, 당연히결함의경우에는운전자가조작자의개입이필요한상황이지만, 도로교통법에규정해야하는부분은법상으로사고가발생하는경우에대해서논란의소 130
141 지를제공할수있을것으로판단된다 (H). 3 Level 3 는운전자의전적인책임을전제하므로별도의규정을둘필요는없다 (B). 3 입법반영사항앞서 Level 3에있어가장중요한의무로써일반적인운전자의안전운전의무를언급한바있다. 생각건대 Level 3에서의안전운전의무의하나의세부적인의무가바로시스템의결함으로인하여시스템자체의비정상적인상황의인식, 판단그리고오류의지시가있는경우운전자에대하여즉각적이고적절한개입의무를부과하는것이라고할수있다. 이러한상황에대하여운전자의적극적개입에관한것이법적의무로부과되지않는다면 Level 3의전제를부정하는것이고 Level 4와구분할수없게되며모든사고의책임을프로그램의제작사혹은차량제조사에게만돌리게하는불합리한결과에이르게된다. 물론이러한경우의책임을모두개입의무를해태한운전자에게전부돌리라는의미는아니다. 적절하게개입했어야할운전자에대하여그에비례하는책임을추궁하는것이면충분하다. 한편이러한견해에비하여 Level 3에서는운전자가사고의결과에대하여전적인책임을부담하는것을전제로하고있기때문에이러한개입의무규정을별도로둘필요가없다는의견도제기된다. 그러나 Level 3에서운전자가사고에대한전적인책임을진다는것은옳은시각은아니다. 운전자가일반적으로책임의주체로등장하는것은옳다하더라도실제사고결과운전자가발생한손해전부를진다는뜻은아니기때문이다. 그발생한손해에대하여자율주행시스템에도일단의책임질요인이있다면당연히그만큼그제작사가책임져야하는것이마땅하다. 결론적으로시스템의결함으로인하여시스템자체의비정상적인상황인식과판단이있는경우운전자에게적극적인개입의무를부과하는것은필요하고, 도로교통법상이의무의신설은전술한안전운전의무의하부혹은세부의무사항으로위치하는것이적절하다. (3) 운전자또는조작자의자율주행자동차내좌석위치 1 논의의배경 Level 3의자율주행자동차는운전자혹은시스템조작자가시스템의요청혹은독자적인판단상 ( 시스템자체의결함으로정상적인인식과판단이어려운상황인경우 ) 개입이필요한상황이라고판단하는경우즉각적인개입이가능해야함을조건으로한다. 그리고이러한운전자의개입은성질상소극적이아닌적극적개입의무를의미하고이의무를위반할경우그에대한책임도부담하게된다. 따라서이를구현하기위해서는언제든지개입이용이하고즉각적으로개입이이루어질수있도록뒷좌석등에위치하는것을금지해야한다는의견이 131
142 다수제기된다. 2 전문가설문조사의결과 운전자또는조작자의자율주행자동차내착석위치운전자또는조작자의자율주행자동차의자동차내착석위치를운전석으로해야하는지여부와관련하여, 이를긍정하는견해 (7명) 가압도적으로우세하였다. 그근거는다음과같다. 1 긴급상황에서의운전자개입이필요한단계이므로신속한조치를위해운전석에의착석의무부과는필요하다고보며, 뒷좌석에앉아있거나좌석을회전시켜뒷좌석의동승자와이야기를할수있다면신속한상황판단에따른수동조작전환은불가능하다고생각된다 (G). 2 운전자개입이필요한경우가항시발생할수있다 (E). 3 응급상황시운전할수있는상태는유지되어야한다 (B). 4 Level 3의경우, 자율주행자동차가자율주행모드로운행중에특정상황발생시단시간 ( 약 20초이내 ) 에사람이운전할수있는상태가되어야한다 (C). 5 시스템의제어권전환요구에대응해야한다 (F). 6 항상수동개입을대비해야한다 (D). 7 비자율주행자동차의충돌시피해최소화를위한조작이필요하다 (H). 이에반해운전자또는조작자의자율주행자동차의자동차내착석위치를운전석으로할필요가없다는견해 (1명) 는자율주행모드에서는운전석에꼭착석할필요는없다고판단되지만, 비정상적인상황이인식되는경우에차량을멈추거나조작할수있는부분이다른좌석 ( 뒷자석등 ) 에도있어야한다는점을그근거로제시하였다 (A). 이견해는비정상적상황이인식되는경우차량을조작할수있는장치가다른좌석에있을것으로전제로운전자또는조작자의착석위치를운전석으로국한할필요가없다는의견이므로결과적으로는운전석에착석할필요가있다는다수견해와그맥락을같이하는것이다. 3 입법반영사항 Level 3에서일반적인안전운전의무의구체적인세부준수의무로써적극적인개입의무를부과하는것으로충분하다는견해도만만치않다. 왜냐하면적극적인개입의무를충분히실천할수있고또한적극적인개입을적절하게했음에도불구하고사고를피하지못한경우에운전자가단순히좌석위치를위반했다는이유로책임을지게되는문제가생길수있기때문이다. 132
143 특히좌석위치와상관없이예컨대기술개발상황에따라서는뒷좌석에충분한개입혹은조작할수있는장치가마련되어있거나혹은향후에는뒷좌석혹은옆좌석이즉각운전석으로전환되는기술도개발될수도있는것이기때문이다. 그렇다면좌석위치를지정하거나뒷좌석을금지하는규정으로이문제를해결할것은아니다. 즉적극적개입의무를즉각실현할수있는곳에위치할의무를부과하는정도면충분하리라고판단한다. 따라서이러한위치의무를신설하여규정하고있다면다음의경우에는의무위반에해당하는것이된다. 즉아예운전자나조작자가차에승차를하지않는경우, 즉시운전석으로의전환이이루어지지않는차량에서옆좌석혹은뒷좌석에착석하고있는경우, 혹은적절한개입을위한장치가없는좌석에위치하여개입의무를실현할수없거나곤란한경우등이다. 한편이신설의무도안전운전의무의하부혹은세부의무로써전술한적극적인개입의무와동렬의위치에신설하는것이적절하다. (4) 운전자의모니터링의무 1 논의의배경일반차량의운전시에자율주행모드에대한모니터링을요구할수는없는것이다. 당연히 Level 3가자율주행모드에의한독자적인운행을전제로하기때문에발행하는논의인것이다. 자율주행모드로의운행시운전자가적극적으로개입할태세를갖추어야하기때문에운전자에게상시자율주행시스템의정상적인작동여부를모니터링해야하는것은당연한것이기때문이다. 2 전문가설문조사의결과 운전자의모니터링의무운전자또는조작자의자율주행자동차안전작동에대한모니터링의무인정여부와관련하여, 자율주행모드에서는항상모니터링해야하지만운전자모드에서는모니터링이필요없다는견해 (4명), 항상모니터링해야한다는견해 (2명), 모니터링하지않아도된다는견해 (2명) 등으로나누어졌다. 자율주행모드에서는항상모니터링해야하지만운전자모드에서는모니터링이필요없다는견해의근거로는 1 자율주행의경우어떠한형태로든안전작동에대한모니터링은있어야하지만, 운전자모드의경우에는실제운전을운전자가하기때문에모니터링이필요하지않다는점 (A), 2 Level 3는운전자의책임하에운행되므로모니터링이필요하지 133
144 않다는점 (B), 3 Level 3의경우자율주행모드에서는가끔모니터링하면되고, 운전자모드에서는일반자동차운행과동일한상태라는점 (C), 4 자율주행모드에서는항상모니터링해야하지만, 운전자모드에서는모니터링이필요없다는점 (H) 등이제시되었다. 항상모니터링해야한다는견해의근거로는 1 자동차의 모든 기능이정상적으로작동되고있는지여부에대한판단을운전자에게전적으로의존시키기에는한계가있기때문에자율주행자동차의안전작동에대한모니터링의범위를어떻게보느냐에따라달리평가될수있는데, 차량의안전작동여부에대한확인은운전자보다는제조사의부담이더큰부분을차지하도록입법되어야하고, 이경우경고기능은기계적으로해결해야하고, 운전자는현존하고명백한위험에대하여경고음이울렸음에도이를인지하지못하고적절한조치를못한경우로한정해야하며, 센서등의오류까지운전자책임으로볼수는없다는점 (G), 2 어떠한상황에서도안전이최우선이므로항시모니터링이필요하다는점 (D) 등이제시되었다. 모니터링하지않아도된다는견해의근거로는, 1 자율주행모드를신뢰해야한다는점 (E), 2 Level 3의기술은자율주행중에운전자의모니터링의무가없는모드라는점 (F) 이제시되었다. 3 입법반영여부전문가설문조사결과는모니터링의무가필요치않다는견해가다수로나타났다. 대체적으로는 Level 3에서는운전자가책임의주체이기때문에당연히수반되는의무일뿐이를별도로규정할필요는없다는입장이다. 그러나전술한바와같이책임의주체가된다는것과사고로인해발생하는손해에대하여전적인책임을진다는것은엄연이구분되는것이라는점은이미밝힌바있다. 생각건대모니터링의무는운전자의적극적인개입의무를보다명확히하는선언적인의미만있는것이라고할수있다. 운전자가안전운전의무로부터차의운행상태와자율주행시스템의정상적인작동상태를감시해야하는것은당연히수반되는의무에포함된다. 또한앞서신설이필요하다고판단한 적극적 개입의무는 소극적 인것이아니라시스템이요청하지않더라도운전자자신의적극적인인식과판단에따라개입을실행하는것을의미하기때문에모니터링의무는당연히포함되는것을해석할수도있다. 따라서일반의무인안전운전의무와그의세부적인실천의무에해당하는적극적개입의무가존재하는한, 그에포섭되는세부적인실천의무에해당하는모니터링의무는그것이이들의무를보다명확하게구체화한다는의미이외에는특별한의의가존재하지않는다고보는한굳이규정화할이유는없다고판단한다. 134
145 (5) 자율주행시스템의정상적인작동상태에서도인식할수없는상황에대한규율 1 교통정리시수신호의교환에관한규율도로교통법에부과되는의무혹은준수사항은모두운전자가자연인사람의존재를전제로하여두는규정이다. 그대표적인것이교통경찰관과사람인자동차운전자와의수신호교환에의한주행의경우이다. 이경우는현행도로교통법상교통정리와관련된곳곳에서규정을두고있는데모두사람인운전자가교통경찰관의수신호에대한이해를전제로하고있다. 그러나아무리완벽한카메라와음향장치를갖춘자율주행프로그램이더라도다양하고도불명확한제스처의수신호를정확하게읽어내는것은불가능에가까운일이므로이에관한적절한규율을해둘필요가있는것이다. 이와같은상황에서는앞서시스템의결함으로인하여비정상적인상황인식을하는경우에있어운전자의개입과는달리시스템이운전자의개입을요청하는상황일가능성이높지만상황자체를인식하지못하는경우도분명존재할수있다. 따라서바로이러한경우를대비하여운전자가스스로판단에의하여적극적으로개입해야할의무를부과하는것이필요하다. 2 우선순위가확정될수없는도로에서의수신호교환에관한규율현행도로교통법에는관련규정이미비되어있는사항이지만, 외국의도로교통법상으로는사람인운전자간의수신호에의한주행을규정하는예에관한것이다. 예컨대어느경우에도주행의우선순위가확정될수없는도로에서는운전자간의수신호에의해교행또는주행하도록하는경우이다. 이러한상황도그수신호에의한교행또는주행의의무에관한규정은사람인운전자를전제로해서만가능한규정이다. 이경우역시 Level 3의자율주행자동차의도입시에운전자의적극개입의무를부과하는것이필요하다. 이러한상황에서도시스템의결함으로인하여비정상적인상황인식을하는경우와같이시스템이운전자에상황인식을전달하지못하거나정확한판단과요청을못할수도있다. 따라서이러한경우를대비하여운전자가스스로판단에의한적극적인개입의무를신설해둘필요성이있다. 4. 운전면허및교육제도가. 외국의자율주행자동차면허및교육관련동향 (1) 자율주행자동차운전면허도입과관련한현행규정및제도검토현재운전면허기능시험에대한각국의제도에대한고찰을통해향후자율주행자동차가 135
146 도입되는경우각국의운전면허제도가어떻게바뀔지를예측해보도록한다. 운전면허에대한국제협약이나지침은존재하지않으나 EU의경우 EU 가입국에게적용되는운전면허표준지침 (2006/126/EC) 을제시하고있다. 동지침에의하면기능시험은차량점검, 기본조작시험, 도로에서의주행시험으로구분하고있는데, 차량점검과기본조작시험은특정행위의과정을중심으로평가하고, 도로에서의주행시험은행위과정보다는이러한행위를통한결과중심으로평가하고있다. 88) < 표 9> EU 의운전면허기능시험평가항목및세목 구분 차량과장비 평가세목 수동변속차량운전자는수동변속차량운전기술및태도시험을통과해야함 자동변속차량운전기술및태도시험시. 자동변속운전차량조건부면허발급 운전기술및태도시험용차량 : 최소 100 km /h 의속도를낼수있는사륜자동차 가맹국은더엄격한기준을위한규정을제정하거나그외다른기준추가가능 운전기술및태도 도로안전과관련한차량준비와기술점검 도로안전과관련한특별시험 교통태도 올바른착석을위해필요한경우좌석조정하기 가능한경우후사경, 안전벨트와목받침대조정하기 차문이닫혔는지점검하기 타이어, 핸들, 브레이크, 유동액, 등화, 반사경, 방향지시등수시점검 차로를유지하며직진차선에서후진하거나코너에서좌우로역회전 전방기어와후진기어를사용하여차량을반대방향으로돌림 차량을주차하고주차공간을나옴 ( 평면도로, 언덕이나오르막길에서평형, 예각또는우간, 전면또는역주차 ) 제동하여정확히정지하기 ( 비상정지실행은선택사항 ) 차량을운전해서나감 : 주차후, 운전중정지후 ; 차로나가기 직진방향도로에서운전 ; 제한된공간에서의추월을포함한추월 십자로 : 교차로와합류점으로의진입과횡단 방향변경 : 좌우회전 ; 차선변경 고속도로또는유사한도로 ( 있을경우 ) 진출입 : 추월선또는감속차선 추월 : 추월하기, 장애물통과하기, 추월당하기 특이한도로특징들 ( 있는경우 ): 로터리 ; 철로횡단 ; 트램 / 버스정거장 ; 보행자횡단 ; 긴경사로의오르막길 / 내리막길 하차시주의사항. 각국의기능시험내용을보면 EU 의기준과유사하게차량점검, 기본조작, 도로주행능력을 평가하고있는데, 우리나라와달리응시자가시험용자동차를준비하는경우가많다. 이에시 험용자동차의일반적인조건을제시하고있으며, 이러한자동차조건에대한예외를인정하 88) 예를들어추월을하는경우적정한시기에적정한방법으로추월이라는행위를수행하는것이문제이지, 어떤조작장치를사용하고어떤과정을거쳐추월하여야하는지를규정하지는않는다. 136
147 는경우차량개조조건을부과하면서운전면허증에이를명기하고있다. 국가시험내용시험용자동차조건 영국 독일 프랑스 미국 호주 일본 시력검사 : 자동차번호판읽기 차량안전관련구술시험 : 문제은행에공개된 25 문항중 2 문항 기본조작 : 경사로출발등 6 개과제 도로주행 : 자주운전포함 차내장치조작 비도로상 - 후진평행주차등의무과제 2가지 - 선택과제 1가지 도로주행 차량안전점검 비도로상평가 도로주행 - 조작, 도로상황이해, 다른이용자와도로공유 - 위험인지와대처능력 - 가산점부여행위 차량안전점검 도로주행 < 표 10> 국가별기능시험내용및시험용자동차조건 25 개구역에서의운전수행능력 속도관리, 위치선정, 의사결정, 위험인지, 위험반응, 차량제어의 6 개요소 가면허 : 연결식코스내과제주행 본면허 : 평행주차등장내코스, 도로주행 응시자가준비 : 본인자동차또는렌터카 ( 자동차 4 개의바퀴 최고속도 62.5mph 또는 100km/h 이상 속도측정가능한속도계장착 차량전방과후방에 L 표지판장착 최대허용중량 3,500kg 이하 보험가입, 납세증명서, 자동차검사증 시험관을위한안전벨트장착 차내후방거울장착 최대속도 130 km/h 4 인승 오른쪽에두개의문 실내백미러, 2 개의우측외부백미러 학원의연습용자동차대여 ) - 응시가능한자동차조건제시 차량등록증및번호판, 보험 방향지시등, 브레이크등, 경적, 비상브레이크, 주차브레이크작동 운전자측창문개폐가능 시야를가리지않는앞유리 두개의백미러부착, 안전띠장착 운전면허시험장에서시험차제공 자동차등록증부착자동차검사증부착 승차정원 5 명이상인보통승용차로, 축거가 1.30m 이상인것 - 길이 : 4.40 이상 4.90 이하 - 폭 : 1.69 이상 1,80 이하 - 축거 : 2.5 이하 2.80 이하 주로장애등의사유로인하여특별한장치를부착하거나자동차의개조가필요한경우가 이에해당하는데, 참고로 EU 의자동차개조조건은다음과같다. 137
148 < 표 11> EU 의운전면허증에기재되는자동차개조조건 구분 변속기변경 클러치변경 제동체계변경 가속체계변경 제어와가속결합변경 통제장치변경 핸들변경 운전석변경 기타 수동변속기 전자변속기 보조변속기상자없음 조정클러치페달 자동클러치 제동조절페달 왼발용제동페달 경사진제동페달 기능이강화된상용제동의최대치사용 자동주차제동 발로작동하는주차제동 ( 조절 ) 전자식상용제동 가속조절페달 기울어진가속페달 무릎가속 왼쪽제동페달에있는가속페달 앞 / 접이식 / 독립식가속페달분할 평행페달 미끄럼 (sliding) 식가속과제동 접이식 / 독립식가속과제동페달 한쪽제동페달분할 앞가속과제동페달분할 전자식가속과제동 구체적조건 자동변속기 기어변경조절레버 수동클러치 앞 / 접이식 / 독립식클러치페달분할 확장제동페달 한쪽용제동페달 수동 ( 조절 ) 상용제동 비상브레이크의최대치사용 전자주차제동 앞 / 접이식 / 독립식제동페달분할 무릎으로작동하는제동 한쪽용가속페달 수동가속 서보가속 ( 전자식, 공기식, 등등 ) 왼쪽가속페달 같은 ( 또는거의같은 ) 수준페달 미끄럼식과정형식가속과제동 위로돋아진바닥 한쪽제동페달첨가를위한분할 뒤꿈치 / 다리지지 핸들과조종장치에부정적영향을미치지않고작동하는통제장치 왼손으로핸들과부속품 ( 손잡이, 포크 ) 을풀지않고작동하는통제장치 핸들, 부속품과가속제어결합연동장치를풀지않고작동하는통제장치 핸들과부속품을풀지않고작동하는통제장치 오른손으로핸들과부속품을풀지않고작동하는통제장치 표준보조핸들 백업체계가있는핸들 핸들조절 ( 핸들크기및두께, 기타 ) 발로작동하는운전 핸들에있는손잡이 핸들선회장치 착석을위해등받이가있는운전석 미끄럼식작동으로길이를늘리는운전석 안전벨트조정 특정차량 / 차대번호 ( 차량구별번호, VIN) 에제한 특정차량 / 등록판 ( 차량등록번호, VRN) 에제한 보조강화핸들 핸들지지대 경사진핸들 수평핸들 수직핸들 대체조절핸들 ( 조이스틱, 기타 ) 신체유형에맞게조절하는운전석 팔걸이가있는운전석 다만응시자의운전을보조하는전방충돌경고 (FCW), 차선이탈경고 (LDWS) 장치, 크루즈콘트 롤 (Cruse Control), 자동정지장치 (Automatic Braking), 차선유지장치 (Lane Keeping), 자동주차장 138
149 치, 차로변경장치, 차간거리경고장치등을부착한자동차를이용하는경우, 이러한장치를사용한운전의허가에대한문제가제기되면서이에대한표준을정할필요가있다는의견이제시되기도하였다. 수동변속외에자동변속을장착한차량에대한별도조건을부과하는것, 차량개조조건을통하여기존의응시자와는다른조건하에서운전면허시험을실시하는것, 기능이제한되어있기는하나특정한자동화장치를사용하게하되조건을부과하게하는것등은향후자율주행자동차상용화와이에대비한운전면허도입에참고가될수있을것이다. (2) 자율주행자동차운전면허도입동향미국, 유럽, 일본을비롯한아시아국가모두자율주행자동차의시험운행에필요한운전자조건은제시하고있으나실질적인상용화를대비한운전면허계획을수립하고있는국가는없는것으로조사되었다. 이는외국의경우에도자율주행자동차는상용화단계가아니라시험주행단계이고, 향후상용화된다하더라도단계가운전자가언제든지개입할수있고개입하여야하는제한된자동화 (Limited Self-Driving Automation) 단계이기때문에기존의운전면허외에별도의자율주행자동차운전면허를신설할필요가없기때문이다. 나. 자율주행자동차운전면허제도도입방안 (1) 자율주행기술단계와운전면허자율주행자동차개발및상용화는크게제한된자동화단계 (Level 3) 와완전자동화단계 (Level 4) 로구분될수있는데, 제한된자동화단계에서의운전면허에대한접근과완전자동화단계에서의운전면허의접근은완전히다른방식이될것이다. 제한된자동화단계의경우현재의운전면허체계를유지하면서자율주행자동차에대한적용사례를신설하는방향으로의제도개선이필요하다. 이러한판단의근거는다음과같다. 첫째, 일부의상황이나조건에서는시스템에전부의존하더라도최종적인책임자는운전자이며, 운전자는자율주행시스템모드로운전하더라도언제든지수동모드로운전할수있어야하기때문에자율주행자동차를운전하는경우라도수동모드에서의운전능력을평가할필요가있다. 둘째, 제한된자동화시스템이상용화된다하더라도자동차회사별, 차종별로자동화정도가다를수있으므로이에대한개별적인판단도필요하다. 셋째, 운전자는자율주행자동차뿐만아니라일반적인자동차를운전하여야하는상황을대비하여기존의운전면허를취득하고자할것이므로기존의운전면허에대한수요가감소하지는않을것이다. 그러나완전자동화단계에서는별도의자율주행자동차면허에대한전반적인검토가필요하다. 139
150 제한된자동화단계와완전자동화단계모두에적용되는운전면허응시자의구분과이에대한고려사항은다음과같이세가지로구분할수있다. 이러한세가지경우에서우선적으로판단하여야하는것은자율주행자동차운전이기존의운전자에게요구하는역량이외에추가적으로필요한역량이있는지, 아니면반대로기존의자동차운전역량중일부역량에대한예외가필요한지나아가운전면허를취득하게할필요가있는지에대한것이다. < 표 12> 운전하고자하는자동차유형별운전면허제도변경고려사항 유형 제한된자동화단계 고려사항 완전자동화단계 기존의자동차만운전 현재의운전면허체계유지 기존의자동차운전 + 자율주행자동차운전 자율주행자동차운전에추가되는요건필요여부판단 자율주행자동차만운전 - 완화되는운전요건필요여부판단 - 별도의조건면허신설필요성검토 - 운전면허를취득하도록할필요가있는지에대한검토 - 운전면허체계전면개선 VS 자율주행자동차조건부운전면허부여 (2) 제한된자동화단계 (Level 3) 에서의운전면허 1 자율주행자동차운전에조건완화가필요한지에대한검토및적용다음으로기존의자동차운전역량에비해자율주행자동차를운전하는경우에역량의완화가필요한지를판단해보면일정부분의운전역량이줄어들게되고이에대한고려가필요한것으로판단된다. 특히장애인, 노약자인경우자율주행자동차운전이기존의장애인용자동차운전과유사한이유로별도의조건부운전면허부여가필요하다는의견이제시될수있다. 그러나다른한편으로는신체장애를보완하기위한차량개조등은모든운전조건에서항상적용되며상황에따라모드전환이이루어지지않는반면, 자율주행자동차의경우특정상황에서만적용되거나이러한상황에서도수동모드로의전환이필요한경우가발생한다는점에서다르다할수있다. 따라서자율주행자동차조건부운전면허발급은신중히검토할필요가있다. 다만, 시스템의결합이아닌개별자동화장치 ( 예를들면자동주차장치등 ) 의사용과이에대한조건코드부여는검토가필요하다. 2 자율주행차동차운전에조건강화가필요한지에대한검토및적용 140
151 자율주행자동차운전에추가적역량이필요한지에대해판단해보면자율주행자동차에적용되는시스템에대한운전자의지식, 숙련도등을운전면허시험을통해별도로평가할필요가있는지가그대상이될수있다. 기존에시판되는각종부가적편의장치에대해운전면허시험에서별도로평가하지않는다는점, 이미개별적으로장착되고있는자동화장치의경우에도이의조작에대한평가를별도로하고있지않다는점, 개별자동차회사별, 차종별, 차의고급화정도별도부착되는장치의수준이나정도가다르다는점등을들어볼때이를판매하는자동차회사가별도로이에대해교육, 홍보를하도록하는방안이더합리적이라할수있을것이다. < 표 13> 제한된자동화단계 (Level 3) 에서의운전면허제도개선사항 유형 기존의자동차운전 + 자율주행자동차운전 자율주행자동차만운전 제도개선사항 - 별도의운전면허시험필요없음 - 자율주행자동차운전자를대상으로한자동화시스템에대한자동차회사등에서의교육및홍보 - 별도의운전면허체계또는조건부과필요없음 - 개별자동화시스템부착관련조건부과 (3) 완전자동화단계 (Level 4) 에서의운전면허 1 자율주행자동차운전면허필요성검토및적용운전면허는적성검사, 학과시험, 기능시험으로구성되어있는데, 자율주행자동차의경우적성검사와기능시험은현재의체계와다르게구성할필요가있으나운전에필요한지식, 운전예절등을평가하는학과시험의경우여전히필요하다. 특히자율주행자동차와일반자동차가혼재하는상황에서는운전자가기본적으로알아야하는사항이추가될여지도있을수있다. 한편적성검사와기능시험의경우자동화시스템이분담할수있는정도에따라조건이완화될수있으나해당자동차 ( 또는시스템 ) 를해당조건하에서운행할수있는지에대한평가는필요할것으로판단된다. 89) 자율주행자동차면허가필요한경우이러한면허를별도로둘것인지, 아니면조건부운전면허형태로할것이지는자율주행자동차의확산정도에따라달라질것이다. 즉자율주행자동차보급상황에따라 현행운전면허체계유지 / 자율주행자동차조건부면허부과 일반자동차운전면허 + 자율주행자동차운전면허병존 자율주행자동차운전면허 / 비자율주행자 89) 조이스틱나아가음성만으로운전이가능한장애인용자동차의경우에도해당장애인이이러한자동차를이용하여도로를운행할수있는지에대한기능시험이이루어지고있음은참고할만한사례가될것이다. 141
152 동차조건부면허부과 의 3 단계로변화할것으로예측된다. 2 유형별운전면허제도개선사항자율주행자동차가상용화되는경우기존의교통시스템과다른시스템으로변화할가능성이높이때문에기존의자동차만을운전하고자하는경우에도새로운체계에대한이해가필요하기때문에학과시험의경우내용의일부개편이필요할것으로판단된다. 자율주행자동차만을운전하고자하는경우에는조건부면허이든별도의체계를형성하든별도의운전면허시험이필요한데, 이경우학과시험은기존의자동차운전자와동일하나적성검사와기능시험은별도의기준을마련하여실시할필요가있을것이다. 또한자율주행자동차운행에필요하여추가적으로필요한지식등에대한시험은기능시험시구두시험의형식으로실시할수있을것이다. 기존의자동차운전면허를취득한사람이자율주행자동차를운전하고자하는경우에는추가적으로필요한내용의정도에따라추가적으로필요한내용에대한교육을이수하는조건으로운전면허를부여하는방안과기존운전면허로자율주행자동차를운전하게하는방안이있을수있다. 90) < 표 14> 완전자동화단계 (Level 4) 에서의운전면허제도개선사항 유형 기존의자동차운전 기존의자동차운전 + 자율주행자동차운전 자율주행자동차만운전 제도개선사항 학과시험내용개편 - 자율주행자동차운행방식에대한이해 - 자율주행자동차전용시설설치및사용 - 자율주행자동차운전자기존자동차운전자와의관계 추가적운전면허필요여부에대한판단필요 - 대안 1 : 교육이수조건부자율주행자동차운전면허부여 - 대안 2 : 별도의추가적인면허불필요 운전면허체계 - 별도의운전면허체계또는조건부과필요 - 자율주행자동차보급정도에따른단계별변화 1 단계 : 현행운전면허체계유지 / 자율주행자동차조건부면허부과 2 단계 : 일반자동차운전면허 + 자율주행자동차운전면허병존 3 단계 : 자율주행자동차운전면허 / 비자율주행자동차조건부면허부과 운전면허시험내용및방법 - 학과시험 : 현행유지, 추가적인지식에대한평가가필요한경우기능시험시구두시험형태로실시 - 적성검사및기능시험 : 현행대비요건완화 90) 이경우운전자가자발적으로교육을이수하는경우도있을수있으나이경우는별론으로한다. 142
153 다. 자율주행자동차도입에따른교육제도개선방안 자율주행자동차가상용화되는경우필요한교육은기존운전자에대한교육과자율주행자 동차운전자에대한교육두가지로나누어검토할필요가있다. < 표 15> 자율주행자동차도입에따른교육제도개선방안 유형기존운전자자운전율면허주취득행단계자동차운운전전면허자취득후단계 제한된자동화단계 자율주행자동차도입에따른법령개편내용에대한교육및홍보 ( 일부법령개편 ) - 자율주행자동차운행방식에대한이해 - 자율주행자동차전용시설설치및사용 의무교육 : 필요없음 기타교육 : 자동차회사또는도로교통공단등관련기관에서교육및홍보프로그램개발, 교육및홍보실시 별도교육필요없음 교육내용및방법 완전자동화단계 개편된학과시험내용에대한교육 - 자율주행자동차운행방식에대한이해 - 자율주행자동차전용시설설치및사용 - 자율주행자동차운전자기존자동차운전자와의관계 학과교육 - 구성 : 공통교육 + 자율자동차관련교육 - 내용 : 자율주행자동차에대한별도교육프로그램구성 - 방법 : 공통교육반 + 별도교육반 기능교육 - 구성 : 자율주행자동차별도교육 - 내용 : 별도교육프로그램구성 - 방법 : 자동차학원 vs 자동차회사 vs 별도기관 특별교육 ( 교통법규위반또는사고야기자 ) - 교육반편성 : 공통교육반 vs 별도교육반 - 별도교육반이편성되는경우자율주행자동차특성에적합한교육프로그램구성필요 기존운전자에대한교육은자율주행자동차도입으로인하여개정된법령내용을중심으로것이다. 제한된자동화단계에서는자율주행자동차전용시설설치및이용등일부자율주행자동차와관련된법령이개정될것으로판단되며완전자동화단계에서는이러한법령의개정폭이넓어질것이므로학과교육및시험내용이대대적으로개편될것이기때문이다. 자율주행자동차운전자에대한교육은제한된자동화단계와완전자동화단계에서의적용이달라지는바제한된자동화단계에서는자동차회사, 관련기관에서필요한교육프로그 143
154 램을개발하여자발적으로교육을이수하게할필요가있을것이다. 그러나완전자동화단 계에서는운전면허취득단계에서의교육뿐만아니라운전면허취득후단계에서의교육도 기존자동차운전자와는차별적으로제공될필요가있다. 5. 자율주행자동차관련교통사고처리방안및교통사고발생시책임소재가. 형사적책임 - 현행도로교통법과교통사고처리특례법의내용현재판매되고있는자동차들도일종의자율주행자동차 ( 말하자면 Level 2 ) 라고할수있지만, 도로교통법이나교통사고처리특례법에는자율주행자동차관련법령이구체적으로명시되지않고, 실제도로교통법에서는자율주행자동차를자동차관리법제3조에따른자동차정의에의해적용하고있는듯하다. 현행도로교통법이나교통사고처리특례법에의하면, 운전자가차마 ( 車馬 ) 등차량을운행하던중 사고를내고구호의무를다하지않거나, 업무상 혹은 중대한과실 로사람을다치게하거나재물을손괴한경우해당운전자에대하여형사처벌을받게하되, 일정한경우피해자의명시적의사에반하여공소를제기하지못하거나당해차량이보험에가입된경우불처벌의특례를인정하도록되어있다. 하지만, 이들법은기본적으로운전자의주의의무위반여부를토대로형사책임을부과하고있는바, 운전자의조작없이스스로주행하는자율주행자동차가운행중보행자나다른차량을들이받아상해나사망등인명피해를발생시킨경우 사람 이운전한경우와동일하게 기계 에게도 주의의무위반으로인한형사적책임 을물을수있는지, 그렇다면그책임의주체는누구인지, 가령주의의무위반이라하더라도그기술력의정도에따라책임에차등을두어야하는것은아닌지 등이문제될수있고이런의미에서현행도로교통법이나교통사고처리특례법과같은관련법의개정이필요하다. 나. Level 3 자율주행자동차상용단계에서의도로교통법과교통사고처리특례법의개정방안현재운행되고있는자동차들은, 크루즈콘트롤시스템의도입으로사람이운전대를잡지않고도일정속도로앞차와의차간거리를유지한채주행하는것이가능하거나, 차량에붙어있는민감한센서의작동으로장애물의접근을미리경고해주기도하고, 자동주차시스템의작동으로사람이운전대를잡지않고도주차가가능한단계까지발전되고있다. 이는미국도로교통안전국 (NHTSA) 에서정의한자율주행기술단계중굳이따지자면, Level 2에해당하는기술이다. 우리나라는 2020년까지 Level 3까지발전된자율주행자동차의상용화를눈앞에두고있다. 144
155 (1) 도로교통법개정방안 Level 3까지발전된자율주행차량은조향, 제동, 가속등자동차주행관련기능이모두자동화되고사람이핸들을잡거나브레이크를밟는등의행위를할필요는없지만, 예측불가능한돌발상황이발생하는경우즉시 사람 인 운전자 가개입하여수동으로차량의기능을제어해야하는수준을말한다. 따라서완전히운전자의개입을배제한채모든위기상황까지자동차스스로컨트롤이가능한 Level 4와는달리, 현재논의의중심이되고있는 Level 3 수준의자율주행차량의운행은 사람 인 운전자 가운행상황을계속모니터링하고, 사고발생을방지할의무와책임을지고있다는점에서교통사고의처리및그로인한책임의주체를명확히하는쪽으로의개정이필요하게된다. 따라서현행관련법에서 운전자 에게요구되는의무는그대로유지하되자율주행자동차의특수성을고려하여몇가지규정을변경시키는방향으로개정이이루어져야할것이다. 1 일각에서는자율주행모드에서운전하다가사고가난경우 운전자 는 사람 이아닌 자율주행자동차의자동운전시스템 으로보아야한다는주장도있으나, 아직까지 Level 3의단계에서는 사람인운전자 가사고에대한통제권을갖고그에따른민, 형사적책임및사고처리의주체가된다는의미에서기존의운전자개념을바꿀필요는없을것으로본다. 2 Level 3 정도의자율주행자동시스템이장착된차량을운전할때는, 운전자가자율주행자동시스템을능숙하게조작할수있어야하고위험신호가감지되면즉시 91) 위기상황에대처해야하므로도로교통법제80조제2항소정의행정자치부령으로정한면허의종류에자율주행자동시스템장착차량을운전할수있는면허를포함시키고제43조 ( 무면허운전등의금지 ) 가적용되도록해야할것이다. 3 Level 3의경우, V2X 통신기술의적용으로소통정보가실시간으로수집 제공되고운전자의필요에따라자율주행 -수동전환이가능하기때문에원칙적으로는자율주행기능의사용을시간적 장소적으로일부금지하는규정은실효성이없다. 다만, 기본적으로 Level 3 에서는돌발상황에대해 사람 인운전자의조작이필수적이고따라서사람의안전이나재물손괴등의위험을미연에방지하는것이중요하므로위험이가중되는상황이나시간장소등에서의자율주행기능사용을금지하는예외규정을두는것이필요하다. 이러한금지와관련된세부사항은대통령령혹은행정자치부령으로구체화시키는것이타당하다. 4 Level 3 수준의자율주행차량의시스템결함으로자동차가비정상적으로운행되거나시스템이상황인식을제대로하지못하는경우혹은돌발상황이발생한경우, 운전자의개 91) 약 20 초, 미국 NHTSA( 도로교통안전청 ) 기준에따르면, Level 3 의경우운전자가특정상황발생시약 20 초이내에대응하도록되어있음 145
156 입의무를필수적으로규정한조항이추가되어야한다. 이는이단계에서의자율주행자동차의내재적한계로인한사고를방지하기위하여필수적인조항일뿐아니라추후민, 형사상책임소재를가리기위해서도필요하다. 물론, 운전자의개입이필요한상황에대한구체적사항은대통령령혹은행정자치부령등으로규율하거나판례를통해보완되어야할것이다. 5 자율주행기능의사용금지및운전자의개입의무와관련하여위와같은의무가제대로이행되었는지를확인하고실효성을높이기위하여 Level 3 수준의자율주행차량은차량내의모든조작및 사람 인운전자의개입등이자동으로철저하게기록 ( 예를들면, 카메라 EDR, 블랙박스등의장착으로 ) 되어야하고, 기록정보공개를의무화하는것은물론임의로조작하는것을금지하는규정이추가되어야한다. 6 운전자의자율주행자동차내착석위치는현행대로운전석에위치하거나사고발생시피해를최소화하기위해적극적개입의무를즉각실현할수있는위치에있도록규정해야할것이다. 7 자율주행모드 에서운행시 자율주행기능 을믿어야하고 운전자 의모니터링의무가불요하다는관점도있으나, 교통사고의발생이라고하는위험을방지하기위해서라도 모니터링 을게을리하면안되고, 다른일에정신이팔려있다가차량의위험발생경고음을놓치는경우가있어서는아니다. 이는현재의 전방주시의무 에상응하는개념이지만보다세부적이고구체적으로 시스템 에대한모니터링의무를부과하는규정이필요할것으로보인다. 8 이와관련하여 자율주행모드 로차량이운행되는도중교통경찰등의 수신호 에의해규율되는상황에처하게되면자율주행자동차가 운전자 에게경고음을울려 수신호 우선규정을따를수있도록해야한다. 아무리완벽한자율주행프로그램이더라도다양하고도불명확한교통경찰의수신호를정확하게읽어내는것이용이하지않기때문에이럴때는 운전자 의개입이필요하기때문이다. 9 현행도로교통법제49조 ( 모든운전자의준수사항등 ) 소정의운전중휴대폰 ( 동제10 호 ), 영상표시장치의표시및시청금지 ( 동제11호 ), 영상표시장치의조작금지 ( 동제11조의 2) 등규정및도로교통법제44조 ( 술에취한상태에서의운전금지 ) 와관련하여 자율주행모드 로운행할때에도 운전자 에게위와같은금지규정을적용하는것은모순적이고지나치게과한면이있다. 그러나자율주행모드에서도 사람 인 운전자 의개입의무나모니터링의무가필수적이므로원칙적으로는현행의위제규정들이유효하게적용되는것으로하되, 구체적인상황에따라서는예외적으로규정을완화시키는것이필요하다. 10 현행도로교통법제45조 ( 과로한때등의운전금지 ) 규정의적용문제도예외규정을두는방식으로개정될필요성이있다. 현행법은 운전자 의 과로, 질병또는약물 ( 마약, 146
157 대마및향정신성의약품과그밖에행정자치부령으로정하는것을말한다 ) 의영향과그밖의사유로정상적으로운전하지못할우려가있는상태에서의자동차등의운전 을금지하고있지만, 자율주행자동차모드로운전이가능한경우에는 운전자의개입의무나모니터링의무 에지장을주지않을정도의컨디션만유지하면되기때문에, 예외적으로허용되는경우를규정하는것이타당할것이다. 11 Level 3의자율주행자동차는자동운전시스템이완전하지않기때문에안전한차량의운행을위해교통인프라의개선이반드시필요하고, 교통안전시설물등의정확한설치등이확인되어야할것이다. 12 그밖에현재자율주행자동차의운행과관련하여서는자동차관리법이시행되고있는바, 도로교통법조항과상호모순되거나충돌하지않도록법개정방향에제정되어 2020년까지상용화될자율주행자동차의기술발전수준에따라추가연구와논의가필요하고, 그결과가법개정에반영되어야할것이다. (2) 교통사고처리특례법개정방안자율주행자동차의발전과더불어반드시고려되어야할점은 사고발생시책임소재 와관련된것이다. 자동차는위험한물건이라고여겨지고있으며, 사고가발생하는경우에는 허용된위험 의관점에서운전자의과실책임정도를규율하는바, 자율주행시스템모드로주행중교통사고가발생한경우형사책임 ( 민사책임에대해서는후술 ) 의적절한배분이중요하다. 예컨대, 운전자가자율주행모드에서도로교통법상모든의무규정을이행하였음에도차량운행에이상이생겼고, 그에따라사고가발생하였다면이사고의책임은운전자에게있다고할것인가, 아니면차량을제조한제조회사에있다고할것인가. 이는매우어려운문제인데, 왜냐하면현재수준의자동차 (Level 2 수준 ) 만하더라도차한대에수만가지부품이들어가고복잡한전선들의상호연결로인하여신호체계가교란되어자동차를구입한후 3년정도만지나도 ( 때로는차를구입하자마자 ) 우리가이해할수없는크고작은고장들이발생하지만, 도대체그원인이무엇인지알수없는경우가많기때문이다. 따라서소위 급발진 이라고불리는사고가나도그사고의발생원인이규명되지않아현재로서는운전자에게모든책임을미루는형편이다. 상황이이러하다면, 더욱이 Level 3 수준의자율주행자동차의경우그복잡성은우리가상상도못할정도일것이어서오히려원인을알수없는고장이발생할가능성이더클뿐아니라운전자가이상을감지해도통제할수없을가능성이더크다. 그렇다면이런경우에도현재와같이모든책임을운전자에게만돌릴수있을것인가. Level 3 수준의자율주행자동차가상용화되고, 이차량이운전자의수동조작이아닌자율 147
158 주행시스템모드로주행중에사고가발생한경우라면사고의원인은운전자가아니라자율주행시스템모드라고보는것이더합리적일것이며, 이경우현재수준보다는훨씬더큰정도로이차량을제조한제조업체등이교통사고에대한책임을부담해야힐것이다. 가사그렇지않다고하더라도형법상책임원리에기초하여볼때, 자연인인운전자의과실책임문제는상당부분축소되어야하며, 원칙적으로는운전자에게교통사고등의예견가능성및결과회피가능성이얼마나있었는가를따져서판단되어져야한다. 따라서이와같은점을기초로교통사고처리특례법의개정이이루어져야할것이다. 1 이미앞에서주장한바와같이, Level 3 수준의자동차는돌발상황과같은급박한상황변화가일어났을때반드시 사람 인운전자가개입할것을요구하고, 결국사고의책임은궁극적으로운전자에게있다고전제한다는점에서 ( 차량의제조업체가일부책임을부담한다고하더라도형사책임과같은형벌은기계가아닌사람이받을수밖에없다는의미 ) 현행교통사고처리특례법상의운전자개념을변경할필요가없다. 이는도로교통법의운전자개념을변경할필요가없다고주장한것과같은맥락이다. 2 다만, 교통사고처리특례법상형사책임을묻더라도이는형법상자기책임의원칙에기반해야하는것이므로, 만약불완전한자동차의기능이나결함등으로인하여사고가촉발되었다고한다면, 그리고운전자가그와같은기능상문제점이나사고발생을예상할수없었고, 도로교통법에서운전자에게요구하는모든의무사항을운전자가충실히이행했음에도부득이하게사고가발생한것이라면, 사람 인운전자에게사고로인한형사책임을지게하는것은부당하다고생각한다. 따라서현행의교통사고처리특례법에추가로자동차의기능이나결함등으로인한사고혹은운전자가필요한의무를다했음에도예컨대해킹등으로인하여사고발생을예견하거나막을수없었다고한다면 형사적으로면책 되는내용의규정을추가해야할필요가있다. 3 또한자율주행모드로운행되는상황에서긴급한돌발상황이발생하여경고음등을통해이를운전자에게알렸음에도운전자가사고예방을위해조치할수없을정도로위험이급박했거나, 사고예방을위한조치가불가능한경우등에도운전자는면책되어야할것이다. 이는시스템이운전자에게위험경고를지나치게늦게해주었다거나, 돌발상황이미처손쓸수없을정도로갑자기발생했다는것을의미할수있어이런경우까지 사람 인운전자에게책임을묻는다는것은 법이지킬수없는것을운전자에게강요하는것 과마찬가지이기때문이다. 전자의경우라면형사적으로는누구도책임을지지않지만, 민사적으로는제조자인자동차회사가배상책임을져야할것이다. 4 그리고이때운전자가형사적으로완전면책되지는않는다하더라도, 운전자가사고를미연에방지할수있었는지, 혹은사고방지를위해얼마나노력했는지에따라적당하게책 148
159 임을감경하는규정도추가되어야할것으로본다. 5 더욱이현행교통사고처리특례법은제4조에서 보험가입시면책특례 를규정하고있는바, Level 3 수준의자율주행자동차의특성에맞는보험상품에가입한경우, 역시운전자가형사적으로면책되도록특례규정을두는것이법체계상타당할것이다. 6 기타, 사람 인운전자가운행에전혀관여하지않거나사고발생에책임이없는경우등자율주행자동차의기술발전단계에따라형사적책임의정도나인정근거역시계속하여개정되어져야할것이다. 다. 민사적책임일반자율주행자동차의발전은운전자편의성증대와교통안전강화측면에서시작되었으며, 기술의발전으로인하여사고의위험성을상당부분감소시킬것으로기대된다. 이러한기술발전의결과로, 여객및화물운송산업이변화함과동시에교통시스템자체도변화할뿐아니라, 자동차제조업시장과자동차운행관련 SW를비롯한관련산업분야의파장도예고된다. 미국의씽크탱크 (think tank) 연구소 RAND의보고서 (Anderson et al., 2014) 에의하면, 고속도로를주행하는모든차량이전방추돌방지시스템과차선경고시스템, 사각지대보조시스템및적응적전방헤드라이트 (Adaptive Headlight) 를갖추는경우, 추돌사고비율을 3분의 1이상줄일수있을것이라고보았다. 또한자율주행자동차가탑승자를출근시켜목적지에내려준다음, 차량스스로가멀리있는주차공간까지운행하여주차하는것도가능하기때문에, 공간효율화에도기여할수있고궁극적으로는 1인 1 차량소유의개념이사라지고차량공유시스템으로의변화가가능할것이라고하였다 ( 이경우당분간은차량이오가면서기름을더많이소비하거나교통혼잡을유발하는등의문제가발생할수는있으나이는궁극적으로인류가얻는이득에비하면감수할수있는것이라는의미이다 ). 우리나라의경우, 지난 2월부터자율주행자동차의임시운행이허용되면서일반도로에서자율주행자동차가운행되기시작하였으나교통사고가발생했을때이를처리할수있는법률적근거는아직마련되어있지않고있다. 하지만현재개발중인 Level 3의자율주행기술은돌발상황에서운전자에게제어권이이전되므로사고시운전자가책임을부담하는현행법을기본으로하여사고책임문제를다루는것이타당하다. 이와같은맥락에서자율주행자동차의임시운행을허가하였을때 자동차손해배상보장법에따른보험가입을의무화 하여만일의사고에대비하도록하였다. 92) 우리나라에서는현대제네시스 EQ900 이완전자율주행자동차의전단계인고속도로주행 92) 강소라, 자율주행자동차법제도현안및개선과제, KERI Brief 16-21, 한국경제연구원, 쪽. 149
160 지원 (HDA) 시스템을탑재하고, 자율주행자동차로서임시운행첫허가를받았다. 현대는, 이차량에대하여대인은무한, 대물은 1억원한도의보험에가입했으나, 이는자율주행자동차를위한별도의보험상품이아니라차량을테스트하는연구원을지정해기존상품에가입한것이다. 국토교통부는자율주행자동차사고를우선적으로자동차보험으로처리하고특별히차량결함이밝혀지면제작사가구상 ( 제조물보험책임 ) 토록하는방안을검토중에있다. 93) 최근손해보험협회는자율주행자동차상용화대비를위해미래산업부와국토교통부금융당국학계및업계등과함께자율주행자동차협의체를구성할계획을밝히기도하였다. 94) 일본에서는도쿄해상일동화재보험이자율주행시보험차량을위한손해보험상품개발을발표하였으며, 향후자율주행자동차상용화를겨냥한새로운보험상품개발도염두에두고있다고한다. 95) 영국의아드리안플럭스도자율주행 (Adrian Flux) 자동차전용자동차보험을개발해현재시판되는자율주행자동차인테슬라 S의모델소유자가가입할경우자율주행모드로운행시발생하는대부분의사고에대해보상을받을수있게하였다. 96) 하지만, 이와같은임시운행허가정도가아닌, 자율주행자동차가상용화되는정도에까지이르게되면, 그발전정도에따라민사상책임의주체나, 방법이지금과는판이하게달라져야하고따라서관련법의대대적인개정이반드시필요하다. 우리나라의경우, 다른나라에비해자율주행자동차의기술발전이아직은낙후되어있는것이사실이나, Level 3 수준의자율주행자동차운행중교통사고가발생하는경우민사적책임은자동차손해배상보장법과제조물책임법에의해규율될수있고, 교통사고정보조사및분석을위해서는, 도로교통법, 자동차관리법및자동차손해배상보장법등이관련된다고할수있다. 이하에서는민사상책임과관련된자동차손해배상보장법과제조물책임법에대해검토해보기로한다. 라. 현행자동차손해배상보장법과제조물책임법의내용현행자동차손해배상보장법은자동차의운행으로사람이사망또는부상하거나재물이멸실또는훼손된경우에손해배상을보장하는제도를확립하여피해자를보호하고, 자동차사고로인한사회적손실을방지함으로써자동차운송의건전한발전을촉진함을목적으로하며, 97) 자동차운전자들에게책임보험가입을의무화하고있다. 그런데이법은자동차의소유자가직접운전을하지않았다하더라도소유자의지배범위가미치는 사람 을매개로 93) 국토교통부, [Q&A] 자율주행자동차상용화지원방안, ) 전혜영, 손보협회, 자율주행자동차상용화 글로벌협력추진 머니투데이, ) 서정환 일본자율주행자동차시대 착착 보험상품곧출시, 한국경제, ) 오슬기 자율주행전용보험출시보험신문, 英車 ) 자동차손해배상보장법 ( 법률제 호, , 일부개정 ]) 제 1 조목적참조 150
161 운행중사고가발생했다면역시운행자로서책임을지게되어있어사실상무과실책임처럼운용되고있다. 즉, 자동차로인한인사사고에관하여자동차의보유자에게무과실책임과동일한손해배상책임을인정하는동시에정부가재보험 ( 再保險 ) 하는강제보험제도에의하여피해자에게정액의보험금급여를보장 ( 손해의사회보장화 ) 한법률이다 ( 법률제5793 호전면개정 ). 자기를위하여자동차를운행하는자가그운행으로인해다른사람을사망또는부상케한경우, 피해자는보험가입자등에게이에대한손해배상책임을물어보험금등을자기에게직접지급할것을청구할수도있다 ( 자동차손해배상보장법제90조 ). 또자동차의보유자에대해서손해배상을청구할수있다 ( 동법제3조 ). 자동차보유자가피해자에게손해배상금을지급한경우에는보험사업자에게보험금의한도금액안에서그가피해자에게지급한금액을청구할수있다 ( 동법제9조제2항 ). 무과실의입증책임은가해자에게지우고있는점에서, 입증책임의전환이행하여져있고, 그만큼가해자의면책사유가감소되어결과적으로는무과실배상책임에가까운것으로되어있다. 98) 그러나더큰변화는제조물책임법에서발생한다. 현행제조물책임법은물품을제조하거나가공한자에게그물품의결함으로인해발생한생명 신체의손상또는재산상의손해에대하여무과실책임의손해배상의무를지우고있는법률이다. 이로써피해자를보호하고국민생활의안정과제품의안전에대한의식을높여기업의경쟁력향상을도모하기위한것이다. 이법에서말하는 제조물 이란다른동산이나부동산의일부를구성하는경우를포함한제조또는가공된동산을가리키고, 제조물의제조 설계 표시상의결함으로발생한생명 신체또는재산상의손해에대하여배상해야하는자는제조물을제조 가공 수입한자와자신을제조업자로표시하거나제작업자로오인시킬표시를한자이다. 제조업자를알수없는경우에는공급업자도손해배상책임을진다. 제조업자가그제조물을공급하지아니하였거나그제조물을공급한때의과학기술수준으로는결함의존재를알수없었던경우, 제조물의결함이제조업자가당해제조물을공급할당시의법령이정하는기준을준수함으로써발생한경우등에그사실을입증한때에는손해배상책임을면할수있다. 동일한손해에대하여배상할책임이있는자가 2인이상인경우에는연대하여배상책임을진다. 제조물책임법에의한제조업자의배상책임을배제하거나제한하는특약은무효이며, 손해배상청구권의소멸시효는손해및제조업자를안때로부터 3년으로한다. 99) 그러나소비자가제조자의고의나과실을입증해야만피해구제를받을수있어서피해자인소비자입장에서는실효성이없었다. 이에, 입증책임을완화시켜주려는입법적노력이있었으나, 그럼에도불구하고 98) [ 네이버지식백과 ] 자동차손해배상보장법 [ 自動車損害賠償保障法 ] ( 법률용어사전, , 법문북스 ) 99) [ 네이버지식백과 ] 제조물책임법 [ 製造物責任法 ] ( 두산백과 ) 151
162 예컨대급발진사고와같이원인을알수없는사고가발생한경우, 입증책임완화법리가적 용되어제조사의책임이인정된경우는없었다. 마. Level 3 자율주행자동차상용단계에서의자동차손해배상보장법과제조물책임법개정방안 (1) 자동차손해배상보장법의개정 1 Level 3 수준의자율주행자동차상용화단계가되면현행자동차손해배상보장법의개정이필요한것이아닌가하는의문이생긴다. 이법은 사람 인운전자가운전석에서자동차를운행하는것을전제로 주행중사고는운전자책임 이라는개념에서시작하고있기때문에 사람 인운전자의개입없이운행도중발생한사고에대해서도적용될수있을것인가가문제시될수있기때문이다. 이법은 자동차의소유자나자동차를사용할권리가있는자로서자기를위하여자동차를운행하는자 를 자동차보유자 로정의하고 운전자 란 다른사람을위하여자동차를운전하거나운전을보조하는일에종사하는자 로정의하면서개념적으로구분하여사용하고있다. 그리고제3조제1호에서는 자동차보유자 가운행으로인하여다른사람을사망하게하거나부상하게한경우ᄀ 자동차보유자 와 운전자 가주의의무를게을리하지아니하였고, ᄂ피해자또는자기및운전자외의제3자에게고의또는과실이있으며, ᄃ자동차의구조상의결함이나기능상의장해가없었다는것을전부증명한경우에만면책되는것으로규정하고있다. 제3조 ( 자동차손해배상책임 ) 자기를위하여자동차를운행하는자는그운행으로다른사람을사망하게하거나부상하게한경우에는그손해를배상할책임을진다. 다만, 다음각호의어느하나에해당하면그러하지아니하다. 1. 승객이아닌자가사망하거나부상한경우에자기와운전자가자동차의운행에주의를게을리하지아니하였고, 피해자또는자기및운전자외의제3자에게고의또는과실이있으며, 자동차의구조상의결함이나기능상의장해가없었다는것을증명한경우 따라서이법에의하면ᄀ, ᄂ, ᄃ의세가지요건이전부충족되는경우에만면책이가능하기때문에, 사람 인운전자의개입없이자율주행시스템모드로운행중사고가난경우, 이세가지요건이충족되었는지여부를어떤식으로판단할것인지가문제될수있다. 즉, 도로교통법이나교통사고처리특례법상운전자개념이명확히규정되지는않았지만자율주행시스템자체를 운전자 에포함시킬필요는없다는것이제네바협약및다수의견해라고본다면, 자율주행시스템 모드로운행된자동차의교통사고에서면책되기위해서는우선운전자를누구로볼것인지의문제가생긴다. 또한, 사고를야기한자율주행시스 152
163 템모드를자동차의구조상결함이나기능상장해로볼수있을것인지도문제가될수있다. 그리고자동차보유자 ( 자기를위하여자동차를운행하는자 ) 가주의의무를게을리하지않았다는것을어떻게입증할수있을지도문제가될수있다. 만약 자율주행시스템 자체를 운전자 로본다면, 기존의다른법률과의통일성 ( 도로교통법이나교통사고처리특례법상 자율주행시스템 을운전자개념에포함시키지않겠다는 ) 이손상되는문제가생기게되고, 그렇다고이를 운전자 로보지않는경우실제자동차를운행한 자율주행시스템 은 운전자 도아니고, 자동차보유자 도아닌것이되어, 제3조소정의면책조항규정을적용할때문제가될수있기때문이다. 따라서이와같은문제를해결하기위해서는, 운행중인자율주행자동차에탑승하여개입의무와모니터링의무가있는자 를 운전자 로보아그가모니터링주의의무를게을리하지않았다는점과 자율주행시스템 자체나자동차에다른구조적결함혹은기능상장해가없었다는점을입증하여면책이가능하도록해야할것이다. 2 이법은자동차보유자로하여금인사사고에대비하여제5조소정의책임보험등에가입할것을의무화하고있는데, 그렇다면이법에서말하는 의무보험 에가입할수있는자동차의종류에자율주행자동차도포함될수있도록규정을정비해야한다. 하지만, 자율주행자동차시대에는자율주행자동차스스로운행중발생한사고에대하여어떠한개입의여지나통제력이미치지않는자동차보유자가사고책임을부담하게되는문제점때문에현행의자동차손해배상법률체계가불공정하다는불만이발생할가능성이있으므로, 이점에대해서는제작사와부담비율을분담해야하고, 이는결국보험의문제로귀결될수있음을고려해야한다. (2) 제조물책임법의개정 1 Level 3 수준의자율주행자동차가상용화되면, 실제사고의발생이 사람 인운전자의개입이없는상태에서자동차자체의자율운행중발생할수있게되고, 따라서제조업체에게책임을일정정도분담시켜야할필요성이늘어나게된다. 이경우, 자동차손해배상보장법상의운행자책임 ( 자동차보유자에게자율주행자동차에대한사용이익, 운행지배가있는것으로해석 ) 과, 제조업체책임 ( 자율주행시스템혹은자율주행프로그램의결함으로인한사고책임 ) 을구분할수있는명확한기준과각상황에따른손해배상의방법등을구체화시킬것이필요하다. 또한제조업체의실손해배상외에패널티를부과하는것도생각해볼수있다. 2 그러나그렇게되면업체입장에서는배상책임비용이증가하게되고, 자동차부품이나관련소프트웨어기업들에게도연쇄적으로피해배상책임이확산될수있으므로책임의 153
164 한계를어느정도까지규정하는가하는것이중요한어젠다로작용하게될수있다. 3 또한실효성을높이기위해서, 소비자 ( 피해자 ) 의입증책임완화혹은, 소비자 ( 피해자 ) 보호라는관점에서제조물책임법이개정되어야할필요성이있고, 이법제6조소정의 면책특약제한 규정의실효성을확보하기위하여표준약관의제정이나자율주행단계별로배상책임주체등을구분하여규정하는것도필요하다. 특히, 2013년에제조물책임법에입증책임완화규정을신설하였음에도실효성이없었다는점을고려하여아예 입증책임을전환 시키는쪽으로전향적인개정이있어야할것이다. 왜냐하면, 자율주행자동차의시스템에대한지식이점점진화하면서너무도전문적이어서입증책임을완화시켜놓는정도만으로는소비자에게실익이없기때문이다. 바. 현행보험관련법체계의개정필요자율주행자동차가상용화되게되면, 자동차의하드웨어적결함보다는, 소프트웨어의결함, 도로등교통인프라의부족및구조적문제, 정보통신망의오류및해킹과같은통제불능의원인으로사고가발생할가능성이매우크다. 이러한경우모든책임을 자동차보유자 혹은 운전자 에게만전가시키는것은손해의공평한부담이라는대전제에맞지않는측면이많다. 또한, 자율주행자동차가상용화되면사고의책임주체가더욱다양해지고, 사고의발생원인이더욱다양해지며, 각주체별로사고원인을설명하는데보다적합한개념이달라지게된다. 예를들어, 자율주행시스템으로운행되는자동차가사고를일으켰을때, 이를운전자의부주의나주의의무미이행이라는개념으로설명하는것은부적절한측면이있지만, 운전자의경우에는주의의무미이행이절대적인사고원인일것이기때문이다. 또한자율주행자동차가상용화됨에따라오히려사고원인을규명하는것이어려워지고, 사고원인을조사하는데비용이나시간이많이들어가게되고손해사정비가증가될가능성이크다. 그리고보험상품의종류나보상금액도사고원인이나사고주체에따라다양하게개발되어야하고, 무엇보다중요한것은사고발생에책임이있는정도에따라공평하게책임이분산부담되어야한다는것이다. 사. 소결자율주행자동차는도로를달리는차들이전부자율주행자동시스템을탑재하고있어야한다는가정하에이상적으로평가되는경향이있다. 그러나현단계에서는아직까지도로를달리는자동차들의자율주행시스템탑재수준이동질적이라고볼수없고, 과도기적상황에놓여있어오히려자율주행자동차가사람들때문에괴롭힘을당할것이라는재밌는주장이나오기도하는상황이다. 최근메르세데스 -벤츠 USA 대표디에마르엑슬러는 자율주행자 154
165 동차개발이오래걸리는이유는기술문제가아닌사람때문 이라면서실제자율주행자동차가상용화됐을때를가정해, 인간운전자는과속도하고차선을넘나들기도하는데, 이에반해자율주행자동차는운전자의안전이최우선이기때문에절대차선을넘는일이없고, 만약정체된도로에서갑자기옆차가끼어들려한다면인간은양보하지않겠지만자율주행자동차는이를장애물로인식하여브레이크를밟게될것이며, 이러한자율주행자동차의특성을간파한인간운전자들에의해이용당할것 이라는예측을내놓기도했다. 100) 결론적으로, 자율주행자동차의상용화를대비해현재가장문제가되는법률의개정방향에대해간단하게논의해보았으나, 이는논의의첫걸음일뿐이라는점을잊지말고, 계속해서논의를이어가야할것이다. 6. 자율주행자동차교통사고관련딜렘마상황과그해결방안자율주행자동차의교통사고와관련하여제기되는핵심적인논의사항중의하나로는, 교통사고로인하여피해자가발생할수밖에없는이른바딜렘마상황이발생할경우이를해결하기위한소프트웨어의프로그래밍방안이다. 가. 자율주행시스템모드주행시딜렘마상황 Level 3의자율주행시스템또는 Level 4의로봇자동차에서는당해차량이시스템에의하여주행되므로자율주행자동차의생산자는위급상황이나사고상황에대비하여피해를예방하거나최소화하도록관련소프트웨어를프로그래밍해야한다. 이와관련하여사고알고리즘이란자율주행자동차의주행중에발생할수있는긴급사태에대응하기위한일련의프로그램매뉴얼을말한다. 101) 문제는사고로인하여피해가야기될수밖에없는상황에서부득이한선택이요구되는딜렘마상황 (Dilemma-Situation) 이발생한경우에피해를최소화하기위하여소프트웨어를어떻게프로그래밍해야할것인지의여부이다. 이러한딜렘마상황은 Level 3 의자율주행시스템모드로주행중이거나 Level 4의로봇시스템으로서의자율주행자동차가주행할경우에닥칠수있는문제이다. 자율주행시스템에의한주행시닥칠수있는딜레마상황의예를들면다음과같다. 보행자가도로에들어섰다. 자율주행시스템모드로주행하는자동차의제동장치가너무늦게반응하였다. 이경우자율주행자동차는그보행자를충격하거나보행자를피하여도로우측가드레일또는장벽을들이받을수있다. 시스템이가드레일또는장벽을들이받도록프로그래 100) 서울신문, 자율주행차, 인간운전자에괴롭힘당할것 박종익기자 ) 윤지영 / 윤정숙 / 임석순 / 김대식 / 김영환 / 오영근, 법과학을적용한형사사법의선진화방안 (Ⅵ), 한국형사정책연구원, 2015, 354 쪽. 155
166 밍되어있는경우에는자율주행자동차안에타고있던이용자내지승객이사망할개연성이높다. 자율주행자동차가이동의편의등을위하여등장한것이지만자율주행시스템그자체도완벽한것은아니므로사고가발생하는것은피할수없고, 특히자율주행시스템이헤킹등을당한경우에도사고발생을배제할수없다. 이러한딜렘마상황에서시스템의일부를구성하는소프트웨어의프로그래밍방안을생각해보면다음과같이다양하다. 1 전방에보행자 1명이있는경우 - 보행자를충격하여보행자에게피해를입히는대신자율주행자동차에탑승한사람을보호하는방안 - 도로옆가드레일을들이받아보행자를살리는대신자율주행자동차에탑승한사람에게피해를입히는방안 2 전방에수인의보행자가있는경우 - 보행자들을충격하여보행자들에게피해를입히는대신자율주행자동차에탑승한사람을보호하는방안 - 도로옆가드레일을들이받아보행자들을살리는대신자율주행자동차에탑승한사람에게피해를입히는방안 3 전방에보행자 1명이있고도로의우측보도에보행자 1명이있는경우 - 전방에있는보행자를충격하여피해를입히는대신우측보도에있는보행자와자율주행자동차에탑승한사람을보호하는방안 - 우측보도에있는보행자를충격하여피해를입히는대신전방에있는보행자와자율주행자동차에탑승한사람을보호하는방안 4 전방에수인의보행자가있고도로의우측보도에보행자 1명이있는경우 - 전방에있는수인의보행자를충격하여피해를입히는대신우측보도에있는보행자와자율주행자동차에탑승한사람을보호하는방안 - 우측보도에있는보행자를충격하여피해를입히는대신전방에있는수인의보행자와자율주행자동차에탑승한사람을보호하는방안 나. 딜렘마상황에관한논의 MIT(Massachusetts Institute of Technology) 의 Iyad Rahwan 교수등이실시한딜레마상황에관한설문조사에의하면, 응답자들의많은수가사고가발생한경우사망피해자의수를최소화하는 공리주의적 접근방식이타당하다는의견을제시했다. 102) 여기서공리주의적 102) J. F. Bonnefon, A. Shariff, I. Rahwan, The Social Dilemma of Autonomous Vehicles, Science 352(6293), 2016, 쪽참조. 156
167 접근방식이란 최대다수의최대행복 을의미한다. 따라서이러한견해에의하면전방에수인의보행자가있고도로의우측보도에보행자 1명이있는경우보행자 1명을희생자로삼도록프로그래밍되어야할것이다. Iyad Rahwan 교수등이딜렘마상황을공리주의적관점으로해결하려고한배경에는이러한공리주의가미국과영국에널리퍼져있기때문인것으로보인다. 그러나유럽대륙에서는공리주의가확산되어있지않아서피해자의단순한수와잠재적인사망피해자의최소화라는공식이널리확산되어있지않다. 이점에서 Daimler 사의 Klaus Schartel 법무실장은시스템을특정인에게이롭게하고다른특정인에게불리하게하는판단을내용으로하도록프로그램화하는것은독일법체계와유럽법체계에서전혀허용되지않는방식이라고한다. 103) 딜렘마상황에관한상이한도덕관념은자율주행자동차가그한계를초월한경우개별국가에서통용되고있는윤리에상응하게교통사고에대한대응에서나타난다. 차는국가마다상이한관습에맞춘문화적적응체계의산물이기때문이다. 다만, 자율주행자동차의주행과관련한딜렘마상황을해결하기위하여유럽국가에서도영국이나미국에확산되어있는공리주의적사고방식을일정한기준으로삼을수있다는점은배제할수없을것이다. 한편, 자율주행자동차의생산자들은수익의관점에서딜렘마상황을해결하기위한윤리적알고리즘을채용할수있다. 앞에서언급한예를다시한번더들어보면, 공리주의적사회에서인간은일정한상황에서다수의보행자를구할수있는경우에는자신의차량을도로우측장벽에부딪히게할수있을것이다. 그러나자율주행자동차의생산자는자율주행자동차에탑승해있는이용자내지승객의특별한보호에관심을기울일수밖에없다. 만약딜렘마상황에서자율주행자동차에탑승한이용자또는승객을피해자로삼도록프로그래밍하는경우에는어느누구도자율주행자동차를구매하지않을것이기때문이다. 이와같이보행자또는자전거운전자보다자율주행자동차에탑승한이용자또는승객을우선적으로보호하도록프로그래밍한다면사회가이를납득할수있는것인지의문이제기된다. 아마이경우에는일반적인도로이용자인국민의안전의관점에서자율주행자동차에대한저항이있게될것이다. 딜렘마상황을해결하기위한소프트웨어의윤리와관련해서는자율주행자동차생산자와규제자 ( 입법자 ) 는, 1 알고리즘이어느정도수미일관되어있어야한다는점, 2 알고리즘이일반국민의분노를자아내게해서는안된다는점, 3 알고리즘이자율주행자동차구매자들을위협해서는안된다는점등 3가지의각각모순되는목표에도달해야한다. 104) 잠재적인자율 103) ( 최종방문일 : ) 157
168 주행자동차구매자들에대한세심한배려는기업의상업적이유에서필요할뿐만아니라전 세계적으로매년약 120 만명이도로교통으로사망한다는점에비추어보면이미윤리적인 관점에서필요하다. 다. 법적문제로서딜렘마상황그러나자율주행자동차의주행과관련된딜렘마상황은윤리적관점을뛰어넘어법적관점에서고찰해야한다. 딜렘마상황은도로교통에참가한타인의생명과신체에대한위험과직접관련되어있기때문이다. 이점에서딜렘마상황을해결하기위하여소프트웨어를프로그래밍함에있어서는국내법질서에서정한기준을고려하지않을수없다. 이와관련하여중요하게고려해야할법적인기준은바로긴급피난 ( 형법제22조 ) 이다. 딜렘마상황에서자율주행자동차에의한교통사고로인하여다른도로교통참가자에게피해를입힌경우그에대한법적인평가는사람이운전하는차량에의하여교통사고가난경우와동일하게평가해야한다. 사람의운전에의하든시스템에의한주행이든달리피할방법이없는긴급한상황에서적용될수있는법리는동일한것으로볼수있기때문이다. 자기또는타인의법익에대한현재의위난을피하기위한상당한이유가있는경우에는위법하지아니하다는긴급피난의법리에따르면, 자율주행자동차의생산자가자율주행자동차의이용자나탑승자의생명을보호하기위하여도로에침범한동물을충격하도록프로그래밍하거나도로가에설치된장벽을들이받도록프로그래밍하는것은허용된다. 이에반해자율주행자동차의생산자가그이용자나탑승객의생명또는신체의법익을보호하기위하여보행자를충격하도록프로그래밍하는것은긴급피난의요건인 최소침해의원칙 에비추어볼때허용되지않는다고보아야한다. 따라서적어도현행법에의하면, 자율주행자동차의생산자는다른교통참가자의생명을희생양으로삼아자율주행자동차의이용자의생명의위험을방지하도록프로그래밍해서는아니된다. 문제는자율주행자동차의주행전방에보행자가있고도로의우측보도에도보행자가있는경우이다. 이러한딜레마상황에서자율주행자동차의생산자가탑승자를보호하기위하여전방에있는보행자또는보도에있는보행자중어느한보행자를충격하여생명에대한위험을초래하도록프로그래밍한다면, 이에대하여초법규적책임조각사유로서기대가능성을인정할수있는지문제된다. 이경우에는적법행위를기대할수없는특단의사정이있다고평가될수있는때에는형법적비난가능성을탈락시키는것을내용으로하는형법상기대가능성의법리를적용할수있는지검토되어야할것이다. 104) ( 최종방문일 : ) 158
169 어쨌든현실적으로모든상황에적용할수있으면서도최적의결과를도출할수있는알고리즘을만들어내는것은매우어려운일이다. 비록개발자나생산자는인간의존엄성및생명 신체의안전을최대한보호할수있는방안을고안해내어야할의무가있지만, 그들에게윤리적, 철학적, 법률적가치판단마저강요해서는안될것이다. 이점에서안전을담보하기위하여딜렘마상황에서자율주행자동차가갖추어야할안전장치와프로그램의내용을법령에서명확히규정하여개발자및생산자의부담을줄여줄필요가있다. 105) 7. 자율주행자동차의주행에따른구조적안전확보방안 Level 3의자율주행시스템또는 Level 4의로봇자동차는현재의일반적인자동차들과함께도로위를주행하게된다. 이경우도로에서자율주행시스템과일반자동차의혼재된형식의주행으로인하여교통사고가발생할여지가있고, 따라서자율주행자동차도입에따른구조적안전조치를확보할수있는방안을고민해보아야한다. 가. 자율주행모드의외부표시일반적인차와자율주행자동차가뒤섞여서도로를주행할경우에는상호인식이되지않아시스템에따라주행되는자율주행자동차와충돌할위험이있다. 일반적인차의운전자의관점에서는통상의관행대로운전하는과정에서시스템에의하여주행되는자율주행자동차가도로에참가하는경우에는불측의사고가발생할수있고, 자율주행자동차의관점에서도시스템에따라움직이다가갑자기끼어든일반적인차에의하여긴급상황이발생할수있고, 이는곧교통사고를유발하는원인이될수있기때문이다. 일반적인차와자율주행자동차가혼재되어주행하고있는도로에서교통사고의위험을예방하고줄이기위해서는무엇보다도일반적인차에는자율주행자동차를인식할수있는보조장치를부착할필요가있고, 자율주행자동차에도일반적인차와보행자등을확인할수있는장치를부착해야할것이다. 그러나일반적인차에대하여자율주행자동차를인식할수있는보조장치를부착하게하는것은과도한규제로보인다. 이점에서기왕에자율주행자동차가양산되는경우에는자율주행자동차에일반적인차와보행자등을인식할수있는장치를부착하도록해야한다. Level 3의자율주행자동차가자율주행시스템모드로주행하는경우에도이러한시스템모드를인식할수있도록해야할것이다. 물론이경우인식장치는외부에서알수있어야한다. 이와관련하여가장보편적으로활용할수있는외부인식방법중의하나는바로자율주행시스템으로주행하는차량의번호판 105) 윤지영 / 윤정숙 / 임석순 / 김대식 / 김영환 / 오영근, 법과학을적용한형사사법의선진화방안 (Ⅵ), 한국형사정책연구원, 2015, 355 쪽. 159
170 에별도의색깔 ( 예 : 빨간색 ) 을입히는방법일것이다. 나. 자율주행자동차주행기록계의의무적설치필요성 Level 3의자율주행자동차의경우자율주행시스템모드와운전자모드가혼재되어있다. 이와같이두가지모드가혼재되어있는경우에는예컨대자율주행자동차에의한교통사고가발생한경우누가책임을부담할것인지와관련한중요한문제가제기된다. 이경우에는시스템에의한주행중에발생한사고인지또는운전자에의한수동모드상태에서운전중에발생한사고인지에따라그민형사상책임이달라질수있기때문이다. 따라서자율주행자동차의주행중교통사고와관련한책임을명확하게밝히기위해서는자율주행시스템모드에서교통사고가발생한것인지, 아니면운전자모드에서주행시교통사고가발생한것인지확인할수있도록해야한다. 이와관련한구체적인기술적방안으로는항공기의경우와같이블랙박스등주행기록계를설치하도록해야할것이다. 이것은 Level 3의자율주행자동차가마치항공기의조종과같다는점에서도이해할수있다. 물론이경우주행기록계의설치는의무적이어야하며, 자동차관리법등관계법령에명확한법적근거를규정해야할것이다. 다. 주행기록의경찰관열람방안자율주행자동차에주행기록계를의무적으로설치하도록관련법령에명시하는이유는이러한주행기록계를토대로교통사고의원인과책임주체를확인할수있도록하기위함이다. 그렇다면교통사고에대한조사업무를담당하는경찰관으로하여금주행기록계에담겨있는주행기록을열람하도록하여사고의원인과주체를명확하게밝히도록해야한다. 주행기록에대한상세한열람이가능한경우에야비로소조사경찰관의중립적이고공정한교통사고조사가가능하기때문이다. 나아가경찰관이주행기록을열람할수있는절차와방식을법령에규정해두어야한다. 이경우자율주행자동차소유자를주행기록제출의무자로명시해야할것이다. 자율주행자동차소유자를주행기록에대한점유자인동시에관할권자로볼수있기때문이다. 8. 교통안전시설개선및기타자율주행자동차관련개정의필요성가. 교통안전시설개선의방향자율주행자동차의구현은아래그림과같이크게자동차관련기술의발달과함께교통인프라등과의연결성확보를통해구현할수있다고한다. 160
, 차선구분명확성, 도로표지판정보현황, 교통신호등현시및위치정보등에따라, 센싱정보의정확도가달라진다. 그러므로, 교통및도로인프라정보의디지털화가선행되어야한다. 즉, 도로표지판이나교통신호등, 도로의도색등에도기계가인식할수있는수준의정보를제공해주도록하는디지털화하는기술개발이필요하다.")
171 < 그림 20> 도요타의자율주행기술의완성을위한기술블록 자율주행자동차의기술개발은카메라이미지센싱, 레이다및라이다센싱등의기술에서부터판단을위한인공지능기술을거쳐정밀한제어기술까지연계되어작동한다고한다. 하지만, 여기에서제시된센싱정보도교통및도로인프라의상태에따라정확도에큰차이를보이고있다. 즉, 차선의상태 ( 굵기와밝기, 노면상태 ), 차선구분명확성, 도로표지판정보현황, 교통신호등현시및위치정보등에따라, 센싱정보의정확도가달라진다. 그러므로, 교통및도로인프라정보의디지털화가선행되어야한다. 즉, 도로표지판이나교통신호등, 도로의도색등에도기계가인식할수있는수준의정보를제공해주도록하는디지털화하는기술개발이필요하다. 자율주행자동차는사람의눈과귀, 오감에의해인식되고판단되는것이아니라, 인공지능이라는일종의컴퓨터에의해센싱및판단이이뤄지므로, 모든교통인프라와시설물에대한설계개념을달리하는연구개발이필요하다. 즉, 사람은그동안습득되어져오는지식을통해상식적, 통상적생각에의한판단이이뤄지나, 인공지능은자가학습이라는개념적기능이있지만, 모든상황에대한경우의수를입력해야한다는것이다. 이를토대로, 현재운행상태에대한판단이이뤄지기때문이다. 그러므로, 교통인프라의경우에도교통신호등정보는카메라를통한이미지센싱보다는신호등으로부터현시정보와함께, 정확한위치정도가업데이트되는것이더욱효과적일것이다. 또한, 이러한정보를제공해줄수있는동적맵의개발및제공이필요하다. 동적맵에는교통인프라정보뿐만아니라, 레벨별로이뤄지는다양한정보를통합제공해줄수있어야한다. 161

172 < 그림 21> 일본 SIP 의다이나맵을위한프레임워크 이러한동적맵을기반으로다양한운행환경을제어할수있는통합교통관제센터의구축이필요하다. 즉, 비자율주행자동차와자율주행자동차가혼재되어운행되는시점에서부터, 완전자율주행자동차체계로의발전에까지모든정보를디지털화하여실시간으로제공하고제어할수있는체계가필요하다는것이다. < 그림 22> 일본 SIP 의범위와내용 162
")

173 이는자율주행자동차를논하기이전에기술적인프라라는측면에서봤을때, Level 1에서 Level 4까지모두활용할수있는시스템일것이다. 또한, 자율주행자동차기반의교통환경을조성하기위해서는연결성 (Connectivity) 의확보가중요하며이를위한기반교통통신인프라의구축도필수불가결한기본요소이다. < 그림 23> 교통안전을위한기본요소와의관계 V2V, V2I 등 V2X 로표현되는자동차와의통신인프라구축은자율주행자동차뿐만아니라, 교통안전을위해서도가장기본적인내용이다. < 그림 24> 통신과안전운전과의관계 - 도요타 163
 통신망조차몇몇주요도시에한정되어구축되어있다. 그리고, 이또한감가상각등에대한주기적인유지보수가필요함에도불구하고, 예산미반영및미흡한정책적판단에의해중단되거나, 확대가불가능하여활용성이반감되고있는실정이다.")
174 하지만, 현재국내에서추진중인자율주행자동차관련기술개발의경우일반적으로도로인프라로부터다양한정보가실시간으로제공된다는전제하에서다양한시나리오구현을목표로진행하고있으나, 실제도로및교통인프라수준은아주기초적인단계로서해외선진사례에서기술하고있는수준의인프라와제도는요원한상태이다. 교통신호등도아직 2, 3 세대가혼용되고있으며, 향후자율협력주행을위한도로- 교통인프라의뼈대라고할수있는기본 106) 통신망조차몇몇주요도시에한정되어구축되어있다. 그리고, 이또한감가상각등에대한주기적인유지보수가필요함에도불구하고, 예산미반영및미흡한정책적판단에의해중단되거나, 확대가불가능하여활용성이반감되고있는실정이다. 하지만, 정부는이와는별개로이미기구축된 UTIS망과체계를그냥두고다시 WAVE 라는 V2X전용통신망구축에대한논의와실증사업을진행중에있어, 중복과예산낭비가예견되고있다. WAVE 도결국은통신인프라라는측면에서기지국설치와백본망구축, 그리고유지보수와운영측면에서많은예산과별도의관리조직이필요하게된다. 하지만, 이는민간통신영역의침해우려와함께, 기존통신망을활용하지못한예산낭비및중복투자라는평가를피할수없다. 그러므로, 자율주행자동차의조기도입과활성화를위해서는먼저, 교통인프라관련기술개발및구축이선행되어져야한다. < 그림 25> 디지털다이나맵구성 106) UTIS: Urban Traffic Information System 164

175 자율주행자동차를위한교통인프라는앞에서언급한바와같이, 도로- 교통인프라의디지털화를통한실시간정보제공이필요하다. IoT 및클라우드서비스를통해관련정보를디지털화된정보로제공해주는것이필요하다. 또한, 이런다양한노변장치와교통신호등정보를수집, 제어및제공해줄수있는 V2X 통신인프라의확충이다. 이를위해서는예산절감과중복투자를막기위해서경찰청에서운영중인 UTIS의확대구축이필요하다. IoT를활용교통표지판등교통시설의디지털화및실시간정보공유를통한관리체계구축, 그리고, UTIS의확대개편을통한 V2X통신인프라의구축이필수적이라할수있다. 또한, 스마트교통신호등의개발등을통한미래형교통관리체계관련기술을확보하기위한노력을추진중에있으나, 현재각시도지자체에구축된교통신호등의업그레이드측면에서봤을때많은예산이소요될것으로판단되는바, 기술개발및시스템연동기술을확보되는시점까지운영할수있는중간단계의연계기술이필요하다고판단된다. 즉, 현재신호등을최대한활용할수있는기술개발을통해현재신호등체계하에서현시정보및신호등위치정보등을제공해줄수있는단계별추진전략이필요하다. 나. 자율주행자동차안전측면규제및도로이용자안전성확보방향자율주행자동차의안전운행을위해서는앞에서언급한바와같이자동차자체의기술개발을통한안전성확보와함께커넥티드환경하에서교통인프라와의연계 (C-ITS) 방안이가장경제적으로안전성을확보할수있는방법이다. 즉, 아래그림에서보는바와같이독립적인자동차의센싱및제어기술의개발은그한계가있으며, 이러한한계를보완하고안전성을확보할수있는방안은디지털교통인프라의구축을통한상호연계방안이필요하다는것이다. 165

176 < 그림 26> 진화된안전한자율주행을기능확보를위한기반기술과환경 자율주행자동차는운행시교통제어와사고시분석을위해차량결함과운전자부주의, 인프라의오류등에대한다양한유입정보를분석하여디지털적인판단이가능하도록유기적이되정확한판단을할수있도록관련정보의실시간업데이트가필요하다. 이를위해 통합운행관제센터 의구축이필수적이며, 차량의운행관련정보의실시간수집및분석을위한차량단말기의의무장착이필수적이다. 특히, 자율주행자동차의도입에따른유관산업인보험의경우사고원인분석이매우중요하다고볼수있다. 보험개발원의최근연구결과에따르면자율주행자동차의도입시사고에따른보험처리와관련한이슈사항을검토한결과, 자율주행자동차에대한운행정보의실시간수집및분석체계의구축이필요하다고한다. < 그림 27> 자율주행자동차에따른사고원인 < 그림 28> 현행자동차보험체계 166

177 이는, 최근차량의전장화확대에따른급발진등차량결함의증가와함께, 차량사고분석을위한 EDR, DTG 등의차량운행정보기록장치들의기본장착이확산되고있는시점에이에대한규정과교통사고분석시데이터의활용및법정증거능력의확보를위해표준화와장착에대한가이드라인의설정이필요하다. 자율주행자동차의경우에도다양한센싱정보와함께인공지능의판단과정밀제어에의한주행제어가이뤄지나, 이에대한정보의수집및분석을위한표준화된기술적해결방안에대한준비가없어, 실제상용화시사고에대한분석및판단기준의확보가매우어려울전망이다. < 그림 29> 자율주행자동차도입에따른사고조사사례 자율주행자동차는단순히기계가운전을하는것에국한되지않고이로인한전후방산업의가치사슬의변화를불러온다는측면에서이로인한변화를예측하고준비할필요가있다. 이에교통사고에있어서도위와같이사고결함이나, 해킹등다양한외적요인을분석하고조사할공공기관의설립이필요하다는것이다. 이를통해사고조사및사고원인을분석하고관 167
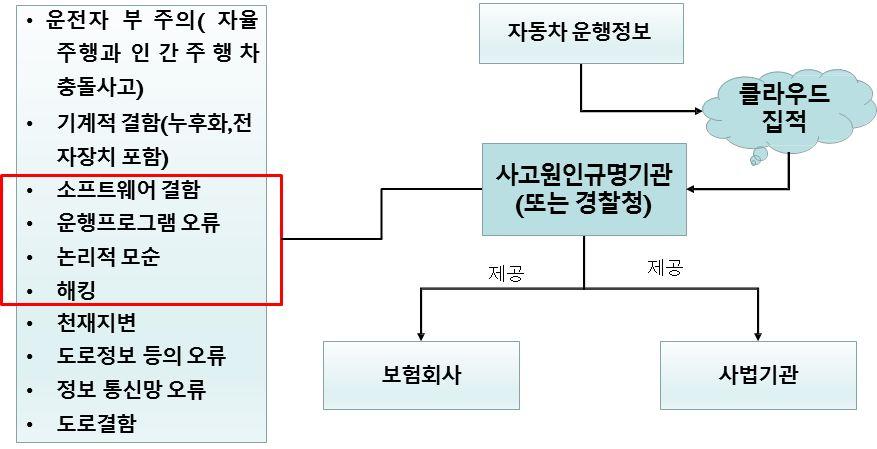
178 련정보를필요기관이나기업에재공해줄수있어야한다는것이다. < 그림 30> 사고조사기관의설립예시 168
2016년 신호등 3월호 내지A.indd
 www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
2002report hwp
 2002 연구보고서 210-23 가족법상친권 양육권및면접교섭권제도의실효성확보방안연구 한국여성개발원 발간사 연구요약. 연구의목적 . 가족법상친권 양육권및면접교섭권제도의내용 1. 친권에관한검토 2. 양육권에관한검토 3. 면접교섭권에관한검토 4. 관련문제점 . 가족법상친권 양육권 면접교섭권제도의시행현황 1. 공식통계를통해본시행현황 2. 친권 양육권 면접교섭권관련법원실무
2002 연구보고서 210-23 가족법상친권 양육권및면접교섭권제도의실효성확보방안연구 한국여성개발원 발간사 연구요약. 연구의목적 . 가족법상친권 양육권및면접교섭권제도의내용 1. 친권에관한검토 2. 양육권에관한검토 3. 면접교섭권에관한검토 4. 관련문제점 . 가족법상친권 양육권 면접교섭권제도의시행현황 1. 공식통계를통해본시행현황 2. 친권 양육권 면접교섭권관련법원실무
PERFORMANCE technology the all-new bmw 5 series. dynamic 06 business 14 comfort 20 safety 22 model LineuP 24 TecHnicaL data 26 bmw service 28 bmw kore
 sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
2016년 신호등 10월호 내지.indd
 www.koroad.or.kr E-book 10 2016. Vol. 434 62 C o n t e n t s 50 58 46 24 04 20 46 06 08, 3 3 10 12,! 16 18 24, 28, 30 34 234 38? 40 2017 LPG 44 Car? 50 KoROAD(1) 2016 54 KoROAD(2), 58, 60, 62 KoROAD 68
www.koroad.or.kr E-book 10 2016. Vol. 434 62 C o n t e n t s 50 58 46 24 04 20 46 06 08, 3 3 10 12,! 16 18 24, 28, 30 34 234 38? 40 2017 LPG 44 Car? 50 KoROAD(1) 2016 54 KoROAD(2), 58, 60, 62 KoROAD 68
보험판매와 고객보호의 원칙
 ..... 61),,,, IT,.,. 2020-2040. IT...... 1 10.. (No Fault). (No Fault). (No Fault). * /. (2016.12.08), (2016.12.24), (2016.12.26) - 243 - 10 2 (2016).... 1),,.,,,.,. 2) (National Highway Traffic Safety
..... 61),,,, IT,.,. 2020-2040. IT...... 1 10.. (No Fault). (No Fault). (No Fault). * /. (2016.12.08), (2016.12.24), (2016.12.26) - 243 - 10 2 (2016).... 1),,.,,,.,. 2) (National Highway Traffic Safety
2016년 신호등 1월호 내지(1219).indd
.indd") www.koroad.or.kr E-book 01 2016. Vol. 425 06 C o n t e n t s 58 48 18 22 04 CEO 18 2016 48! 06 22 52,, 2 08 26,! 56 KoROAD,! 14 28 58 16 32 60,?! 36, 62?, 38, 64 KoROAD?. (IBA) 4! 425 2016 1 4 1980 8 22.
www.koroad.or.kr E-book 01 2016. Vol. 425 06 C o n t e n t s 58 48 18 22 04 CEO 18 2016 48! 06 22 52,, 2 08 26,! 56 KoROAD,! 14 28 58 16 32 60,?! 36, 62?, 38, 64 KoROAD?. (IBA) 4! 425 2016 1 4 1980 8 22.
ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9
![ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9](/thumbs/40/22040462.jpg "ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9") 오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구
홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구") 2015-0213-025 2015년판 교통사고통계 요약 어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구축 관리 분석)하여 교통안전정책 수립
2015-0213-025 2015년판 교통사고통계 요약 어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구축 관리 분석)하여 교통안전정책 수립
untitled
 국문요약....,,... 2,,. 3.,. 4. 5. Abstract Demographic change is greatly accelerating owing to the increasingly low birth rate and aging population in Korea. In particular, the increase in the number of elderly
국문요약....,,... 2,,. 3.,. 4. 5. Abstract Demographic change is greatly accelerating owing to the increasingly low birth rate and aging population in Korea. In particular, the increase in the number of elderly
2016년 신호등 4월호 내지A.indd
 www.koroad.or.kr E-book 04 2016. Vol. 428 30 C o n t e n t s 08 50 24 46 04 20 46,, 06 24 50!! 08? 28, 54 KoROAD(1)! 12 30 58 KoROAD(2) (School Zone) 16 60 34 18 62 38, 64 KoROAD, 40 11 (IBA) 4!, 68. 428
www.koroad.or.kr E-book 04 2016. Vol. 428 30 C o n t e n t s 08 50 24 46 04 20 46,, 06 24 50!! 08? 28, 54 KoROAD(1)! 12 30 58 KoROAD(2) (School Zone) 16 60 34 18 62 38, 64 KoROAD, 40 11 (IBA) 4!, 68. 428
☆5.명묘희(2차수정)경찰학연구제33호.hwp
경찰학연구제33호.hwp") 교통수단의구분및관리에대한도로교통관계법령개정방안연구 The Revision of Road Traffic Act of Classification and Management of Diverse Transport Modes 명묘희 * Ⅰ. 서론 1) Ⅱ. 선행연구및정책동향 Ⅲ. 교통수단구분및관리에관한입법현황 Ⅳ. 국제협약및외국사례에대한비교법적고찰 Ⅴ. 교통수단관리의문제점분석및정책제언
교통수단의구분및관리에대한도로교통관계법령개정방안연구 The Revision of Road Traffic Act of Classification and Management of Diverse Transport Modes 명묘희 * Ⅰ. 서론 1) Ⅱ. 선행연구및정책동향 Ⅲ. 교통수단구분및관리에관한입법현황 Ⅳ. 국제협약및외국사례에대한비교법적고찰 Ⅴ. 교통수단관리의문제점분석및정책제언
대화의길 1. 차량의자율주행 2. 자율주행꿈과도전의역사 3. 자율주행기술 4. 자율주행의길 5. 국가미래성장동력의길
 세종열린정책대화 216. 5 자율주행 (Automated Driving) 의길 - Road & Roadmap - 216. 5. 3 문영준소장한국교통연구원교통기술연구소 ISO/TC24 WG17 Convenor 대화의길 1. 차량의자율주행 2. 자율주행꿈과도전의역사 3. 자율주행기술 4. 자율주행의길 5. 국가미래성장동력의길 차량의자율주행 차량의자율주행가능한가?
세종열린정책대화 216. 5 자율주행 (Automated Driving) 의길 - Road & Roadmap - 216. 5. 3 문영준소장한국교통연구원교통기술연구소 ISO/TC24 WG17 Convenor 대화의길 1. 차량의자율주행 2. 자율주행꿈과도전의역사 3. 자율주행기술 4. 자율주행의길 5. 국가미래성장동력의길 차량의자율주행 차량의자율주행가능한가?
학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental Ta
 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental Ta") www.sen.go.kr 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의 시설 설비및교구기준연구 2012. 10. 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental
www.sen.go.kr 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의 시설 설비및교구기준연구 2012. 10. 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental
ICT À¶ÇÕÃÖÁ¾
 Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
오토 2, 3월호 내지최종
 Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (
 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (") 제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
CR2006-41.hwp
 연구책임자 가나다 순 머 리 말 2006년 12월 한국교육학술정보원 원장 - i - - ii - - iii - 평가 영역 1. 교육계획 2. 수업 3. 인적자원 4. 물적자원 5. 경영과 행정 6. 교육성과 평가 부문 부문 배점 비율(%) 점수(점) 영역 배점 1.1 교육목표 3 15 45점 1.2 교육과정 6 30 (9%) 2.1 수업설계 6 30 2.2
연구책임자 가나다 순 머 리 말 2006년 12월 한국교육학술정보원 원장 - i - - ii - - iii - 평가 영역 1. 교육계획 2. 수업 3. 인적자원 4. 물적자원 5. 경영과 행정 6. 교육성과 평가 부문 부문 배점 비율(%) 점수(점) 영역 배점 1.1 교육목표 3 15 45점 1.2 교육과정 6 30 (9%) 2.1 수업설계 6 30 2.2
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 한국직업자격학회
 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
.................................................hwp
 10.0% 9.0% 8.6% 8.7% 8.9% 8.8% 9.3% 9.0% 8.0% 7.0% 6.0% 5.0% 5.3% 5.7% 5.3% 5.3% 5.9% 6.1% 4.0% 1995 1996 1997 1998 1999 2000 도심 시계 총 통 행 심 야 시 간 대 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 등교 배웅 학원
10.0% 9.0% 8.6% 8.7% 8.9% 8.8% 9.3% 9.0% 8.0% 7.0% 6.0% 5.0% 5.3% 5.7% 5.3% 5.3% 5.9% 6.1% 4.0% 1995 1996 1997 1998 1999 2000 도심 시계 총 통 행 심 야 시 간 대 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 등교 배웅 학원
슬라이드 1
 IT R&D Global Leader 자율협력주행을위한 V2X 통신기술 Krnet2017 미래자율주행자동차세션 2 목차 1 협력주행기술개념 2 협력주행서비스 3 V2X 통신기술표준 4 V2X 통신기술개발 3 1 협력주행기술개념 4 협력주행기술개념 자율주행기술 : 센서를이용한자율주행 협력자율주행기술 : 통신인프라와연계한자율주행 Google s Autonomous
IT R&D Global Leader 자율협력주행을위한 V2X 통신기술 Krnet2017 미래자율주행자동차세션 2 목차 1 협력주행기술개념 2 협력주행서비스 3 V2X 통신기술표준 4 V2X 통신기술개발 3 1 협력주행기술개념 4 협력주행기술개념 자율주행기술 : 센서를이용한자율주행 협력자율주행기술 : 통신인프라와연계한자율주행 Google s Autonomous
특집1 국내 자전거 교통사고 현황과 특징 망자가 차지하는 비중은 오히려 증가(4.9% 5.5%)하 여 사고의 심각성은 더욱 커졌다고 할 수 있다. 나아가 2%대인 자전거 수단분담률에 비해 전체 교통사고 중 자전거사고가 약 5%를 차지하고 있다는 점은 향후 자 전거 안전
하 여 사고의 심각성은 더욱 커졌다고 할 수 있다. 나아가 2%대인 자전거 수단분담률에 비해 전체 교통사고 중 자전거사고가 약 5%를 차지하고 있다는 점은 향후 자 전거 안전") 자전거 교통안전의 현주소와 개선 방향 국내 자전거 교통사고 현황과 특징 Theme 01 국내 자전거교통 인프라 및 시설 확충은 2010년 이후 지속적으로 성장하고 있으나, 자전거의 사고 및 위험성도 증대 되고 있는 실정이다. 따라서 앞으로는 자전거 이용자의 안전 증진 및 사고 예방을 위한 제도 개선과 정책 시행이 필요 하다. 이 글에서는 최근 국내 자전거 교통
자전거 교통안전의 현주소와 개선 방향 국내 자전거 교통사고 현황과 특징 Theme 01 국내 자전거교통 인프라 및 시설 확충은 2010년 이후 지속적으로 성장하고 있으나, 자전거의 사고 및 위험성도 증대 되고 있는 실정이다. 따라서 앞으로는 자전거 이용자의 안전 증진 및 사고 예방을 위한 제도 개선과 정책 시행이 필요 하다. 이 글에서는 최근 국내 자전거 교통
 연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
< C617720BBF3B4E3BBE7B7CAC1FD20C1A632B1C72E687770>
 IT&Law 상담사례집 - 제 2 권 - IT&Law 상담사례집제2권 - 1 - 제 1 장프로그램저작권일반 - 2 - IT&Law 상담사례집제2권 - 3 - 제 1 장프로그램저작권일반 - 4 - IT&Law 상담사례집제2권 - 5 - 제 1 장프로그램저작권일반 - 6 - IT&Law 상담사례집제2권 - 7 - 제 1 장프로그램저작권일반 - 8 -
IT&Law 상담사례집 - 제 2 권 - IT&Law 상담사례집제2권 - 1 - 제 1 장프로그램저작권일반 - 2 - IT&Law 상담사례집제2권 - 3 - 제 1 장프로그램저작권일반 - 4 - IT&Law 상담사례집제2권 - 5 - 제 1 장프로그램저작권일반 - 6 - IT&Law 상담사례집제2권 - 7 - 제 1 장프로그램저작권일반 - 8 -
중앙선복선전철화및 틸딩 (Tilting) 열차화방안
 열차화방안") 2009-016 중앙선복선전철화및 틸딩 (Tilting) 열차화방안 목 차 중앙선복선전철화및틸딩열차화방안 제 1 장 연구의배경 1 배경및목적 1 연구의배경,,, 5,,.,..,., ( ) 10,, 3,,.. . 제 2 장 철도현황및관련상위계획검토 1 철도현황 2 관련상위계획검토 철도현황및관련상위계획검토 1),.,. KTX, 1. 2). 8. 2016. A (~~)
2009-016 중앙선복선전철화및 틸딩 (Tilting) 열차화방안 목 차 중앙선복선전철화및틸딩열차화방안 제 1 장 연구의배경 1 배경및목적 1 연구의배경,,, 5,,.,..,., ( ) 10,, 3,,.. . 제 2 장 철도현황및관련상위계획검토 1 철도현황 2 관련상위계획검토 철도현황및관련상위계획검토 1),.,. KTX, 1. 2). 8. 2016. A (~~)
 학자금지원을위한소득기준 산출방식개선방안연구 한국장학재단이사장귀하 본보고서를 학자금지원을위한소득기준산출방식개선방안연구 의최종 보고서로제출합니다. 2011. 9 주관연구기관 : 한국보건복지정보개발원 연구진 연구책임자 : 홍성대연구위원공동연구원 : 이대영책임연구원추병주연구원구자연위촉연구원 학자금지원을위한소득기준 산출방식개선방안연구 주관연구기관 : 한국보건복지정보개발원
학자금지원을위한소득기준 산출방식개선방안연구 한국장학재단이사장귀하 본보고서를 학자금지원을위한소득기준산출방식개선방안연구 의최종 보고서로제출합니다. 2011. 9 주관연구기관 : 한국보건복지정보개발원 연구진 연구책임자 : 홍성대연구위원공동연구원 : 이대영책임연구원추병주연구원구자연위촉연구원 학자금지원을위한소득기준 산출방식개선방안연구 주관연구기관 : 한국보건복지정보개발원
본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임
 학교안전기준현황파악 ᆞ 분석및 개선방안연구 본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임 목 차 학교안전기준현황파악ㆍ분석및개선방안연구 Ⅰ. 서론 / 1 1. 3 2. 4. 4. 6 3. 8 4. 8 Ⅱ. 국내학교안전관리법규현황 / 9 1. 11 2. 34 Ⅲ. 주요국의학교안전관리법규현황 / 49 1. 51 2. 114 3.
학교안전기준현황파악 ᆞ 분석및 개선방안연구 본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임 목 차 학교안전기준현황파악ㆍ분석및개선방안연구 Ⅰ. 서론 / 1 1. 3 2. 4. 4. 6 3. 8 4. 8 Ⅱ. 국내학교안전관리법규현황 / 9 1. 11 2. 34 Ⅲ. 주요국의학교안전관리법규현황 / 49 1. 51 2. 114 3.
담당부서 배포일시 대한민국임시정부수립 보도참고자료 ( 금) 총 3매 2019년 4월 11일은 100주년기념일입니다 과장이창기사무관김진후주무관이동우첨단자동차기술과담당자,, (044) , 3849 보도일시즉시보도가능합니다. 자율주행자동차상
 총 3매 2019년 4월 11일은 100주년기념일입니다 과장이창기사무관김진후주무관이동우첨단자동차기술과담당자,, (044) , 3849 보도일시즉시보도가능합니다. 자율주행자동차상") 담당부서 배포일시 대한민국임시정부수립 보도참고자료 019. 4. 5.( 금) 총 매 019년 4월 11일은 100주년기념일입니다 과장이창기사무관김진후주무관이동우첨단자동차기술과담당자,, (044) 01-848, 849 보도일시즉시보도가능합니다. 자율주행자동차상용화촉진및지원에관한법률 제정안, 국회통과 자율주행차상용화에대비한법적기틀마련 자율주행자동차상용화촉진및지원에관한법률
담당부서 배포일시 대한민국임시정부수립 보도참고자료 019. 4. 5.( 금) 총 매 019년 4월 11일은 100주년기념일입니다 과장이창기사무관김진후주무관이동우첨단자동차기술과담당자,, (044) 01-848, 849 보도일시즉시보도가능합니다. 자율주행자동차상용화촉진및지원에관한법률 제정안, 국회통과 자율주행차상용화에대비한법적기틀마련 자율주행자동차상용화촉진및지원에관한법률
W7_Business_ 제품설계
 6가지 테마와 24단계 창업 프로그램 벤처창업 (START-UP) Week 7: 스타트업 바이블 Step 20, 21, 22, 23 ; 어떤 과정을 거쳐 제품을 기획하고 설계할까? Hansoo Kim, Ph.D YUST MIS / E-Biz Research Center / BNC ?????,!????,? (Linchpin,, )?? ),, SASA : :,,
6가지 테마와 24단계 창업 프로그램 벤처창업 (START-UP) Week 7: 스타트업 바이블 Step 20, 21, 22, 23 ; 어떤 과정을 거쳐 제품을 기획하고 설계할까? Hansoo Kim, Ph.D YUST MIS / E-Biz Research Center / BNC ?????,!????,? (Linchpin,, )?? ),, SASA : :,,
조사보고서 구조화금융관점에서본금융위기 분석및시사점
 조사보고서 2009-8 구조화금융관점에서본금융위기 분석및시사점 Ⅰ. 서론 Ⅱ. 구조화금융의미시적시장구조 2 조사보고서 2009-08 요약 3 Ⅲ. 서브프라임위기의현황과분석 4 조사보고서 2009-08 Ⅳ. 서브프라임위기의원인및특징 요약 5 6 조사보고서 2009-08 Ⅴ. 금융위기의파급경로 Ⅵ. 금융위기극복을위한정책대응 요약 7 8 조사보고서 2009-08
조사보고서 2009-8 구조화금융관점에서본금융위기 분석및시사점 Ⅰ. 서론 Ⅱ. 구조화금융의미시적시장구조 2 조사보고서 2009-08 요약 3 Ⅲ. 서브프라임위기의현황과분석 4 조사보고서 2009-08 Ⅳ. 서브프라임위기의원인및특징 요약 5 6 조사보고서 2009-08 Ⅴ. 금융위기의파급경로 Ⅵ. 금융위기극복을위한정책대응 요약 7 8 조사보고서 2009-08
폐기물 소각시설 에너지 회수실태 조사 및 모니터링시스템 구축방안 연구.hwp
 2009 년도연구용역보고서 폐기물소각시설에너지회수실태조사및 모니터링시스템구축방안연구 - 2009. 12.- 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 연구책임자 ( 사 ) 한국폐자원에너지기술협의회회장김석준 제출문 본보고서를귀국회예산정책처의정책연구과제 폐기물소각시설에너지회수실태조사및모니터링시스템구축방안
2009 년도연구용역보고서 폐기물소각시설에너지회수실태조사및 모니터링시스템구축방안연구 - 2009. 12.- 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 연구책임자 ( 사 ) 한국폐자원에너지기술협의회회장김석준 제출문 본보고서를귀국회예산정책처의정책연구과제 폐기물소각시설에너지회수실태조사및모니터링시스템구축방안
목차 Ⅰ. 기본현황 Ⅱ 년도성과평가및시사점 Ⅲ 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬
 증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
Layout 1
 대대대대대대대대 :Layout 1 2014-07-15 대대 1:40 Page 1 대학의기업연계형장기현장실습 (IPP) 프로그램확산방안연구 연구보고서 2013-04 http://hrd.koreatech.ac.kr 대학의기업연계형장기현장실습 (IPP) 프로그램확산방안연구 오창헌편저 지은이 오창헌 ( 한국기술교육대학교교수 ) 엄기용 ( 한국기술교육대학교부교수 )
대대대대대대대대 :Layout 1 2014-07-15 대대 1:40 Page 1 대학의기업연계형장기현장실습 (IPP) 프로그램확산방안연구 연구보고서 2013-04 http://hrd.koreatech.ac.kr 대학의기업연계형장기현장실습 (IPP) 프로그램확산방안연구 오창헌편저 지은이 오창헌 ( 한국기술교육대학교교수 ) 엄기용 ( 한국기술교육대학교부교수 )
보도자료 2014 년국내총 R&D 투자는 63 조 7,341 억원, 전년대비 7.48% 증가 - GDP 대비 4.29% 세계최고수준 연구개발투자강국입증 - (, ) ( ) 16. OECD (Frascati Manual) 48,381 (,, ), 20
 ( ) 16. OECD (Frascati Manual) 48,381 (,, ), 20") 보도자료 2014 년국내총 R&D 투자는 63 조 7,341 억원, 전년대비 7.48% 증가 - GDP 대비 4.29% 세계최고수준 연구개발투자강국입증 - (, ) 2014 10 30() 16. OECD(Frascati Manual) 48,381 (,, ), 2014,. * 통계법국가승인지정통계 ( 제 10501 호 ) 로서 1963 년에최초실시된이래, 매년시행하고있는전국
보도자료 2014 년국내총 R&D 투자는 63 조 7,341 억원, 전년대비 7.48% 증가 - GDP 대비 4.29% 세계최고수준 연구개발투자강국입증 - (, ) 2014 10 30() 16. OECD(Frascati Manual) 48,381 (,, ), 2014,. * 통계법국가승인지정통계 ( 제 10501 호 ) 로서 1963 년에최초실시된이래, 매년시행하고있는전국
한국의 양심적 병역거부
 한국의 양심적 병역거부 2 목차 편집자의 말 ------------------------------------------------------------------------------------- 3 한국의 * 상1 개괄 한국의 병역거부운동 -------------------------------------------------------------------------
한국의 양심적 병역거부 2 목차 편집자의 말 ------------------------------------------------------------------------------------- 3 한국의 * 상1 개괄 한국의 병역거부운동 -------------------------------------------------------------------------
 신 재생에너지공급의무화 (RPS) 제도 Contents - 목차 - 1. 신에너지및재생에너지개발 이용 보급촉진법령 2. 신 재생에너지공급의무화제도관리및운영지침 3. 공급인증서발급및거래시장운영에관한규칙 신에너지및재생에너지 개발 이용 보급촉진법령 신 재생에너지공급의무화 (RPS) 제도 5 법률시행령시행규칙 신에너지및재생에너지개발 이용 보급촉진법 신에너지및재생에너지개발
신 재생에너지공급의무화 (RPS) 제도 Contents - 목차 - 1. 신에너지및재생에너지개발 이용 보급촉진법령 2. 신 재생에너지공급의무화제도관리및운영지침 3. 공급인증서발급및거래시장운영에관한규칙 신에너지및재생에너지 개발 이용 보급촉진법령 신 재생에너지공급의무화 (RPS) 제도 5 법률시행령시행규칙 신에너지및재생에너지개발 이용 보급촉진법 신에너지및재생에너지개발
목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종
 2 0 1 4 년 4 / 4 분기 2014. 9 목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ. 2014 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종별전망 7 5. 규모및유형별전망 8 6. 정부경기부양정책발표에따른영향
2 0 1 4 년 4 / 4 분기 2014. 9 목 차 Ⅰ. 조사개요 2 1. 조사목적 2 2. 조사대상 2 3. 조사방법 2 4. 조사기간 2 5. 조사사항 2 6. 조사표분류 3 7. 집계방법 3 Ⅱ. 2014 년 4/4 분기기업경기전망 4 1. 종합전망 4 2. 창원지역경기전망 5 3. 항목별전망 6 4. 업종별전망 7 5. 규모및유형별전망 8 6. 정부경기부양정책발표에따른영향
41호-소비자문제연구(최종추가수정0507).hwp
.hwp") 소비자문제연구 제41호 2012년 4월 해외 소셜 네트워크 서비스이용약관의 약관규제법에 의한19)내용통제 가능성* : Facebook 게시물이용약관의 유효성을 중심으로 이병준 업 요약 업 규 규 논 업 쟁 때 셜 네트워 F b k 물 규 았 7 계 건 됨 규 규 업 객 계 규 므 받 객 드 객 규 7 말 계 률 업 두 않 트 접속 록 트 른징 볼 규 업 내
소비자문제연구 제41호 2012년 4월 해외 소셜 네트워크 서비스이용약관의 약관규제법에 의한19)내용통제 가능성* : Facebook 게시물이용약관의 유효성을 중심으로 이병준 업 요약 업 규 규 논 업 쟁 때 셜 네트워 F b k 물 규 았 7 계 건 됨 규 규 업 객 계 규 므 받 객 드 객 규 7 말 계 률 업 두 않 트 접속 록 트 른징 볼 규 업 내
 ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
H3250_Wi-Fi_E.book
 무선 LAN 기능으로 할 수 있는 것 2 무선 LAN 기능으로 할 수 있는 것 z q l D w 3 Wi-Fi 기능 플로우차트 z q l D 4 Wi-Fi 기능 플로우차트 w 5 본 사용 설명서의 기호 설명 6 각 장별 목차 1 2 3 4 5 6 7 8 9 10 11 12 13 14 7 목차 1 2 3 4 8 목차 5 6 7 8 9 9 목차 10 11 12
무선 LAN 기능으로 할 수 있는 것 2 무선 LAN 기능으로 할 수 있는 것 z q l D w 3 Wi-Fi 기능 플로우차트 z q l D 4 Wi-Fi 기능 플로우차트 w 5 본 사용 설명서의 기호 설명 6 각 장별 목차 1 2 3 4 5 6 7 8 9 10 11 12 13 14 7 목차 1 2 3 4 8 목차 5 6 7 8 9 9 목차 10 11 12
120330(00)(1~4).indd
(1~4).indd") 도시개발법시행규칙 [ 별지제 5 호서식 ] 색상이어두운란은가작성하지않습니다. 접수번호 접수일자 성명 ( 법인의명칭및대표자성명 ) 주민등록번호 ( 법인등록번호 ) 전화번호 구역명 동의내용 구역면적 ( m2 ) 사업방식 시행자에관한사항 본인은 도시개발법 제4조제4항및영제6조제6항에따라환지방식의도시개발계획에대하여시행자등에게설명을듣고위내용 ( 개발계획수립과정에서관계기관협의및도시계획위원회의심의결과등에따라개발계획이변경되는경우를포함합니다
도시개발법시행규칙 [ 별지제 5 호서식 ] 색상이어두운란은가작성하지않습니다. 접수번호 접수일자 성명 ( 법인의명칭및대표자성명 ) 주민등록번호 ( 법인등록번호 ) 전화번호 구역명 동의내용 구역면적 ( m2 ) 사업방식 시행자에관한사항 본인은 도시개발법 제4조제4항및영제6조제6항에따라환지방식의도시개발계획에대하여시행자등에게설명을듣고위내용 ( 개발계획수립과정에서관계기관협의및도시계획위원회의심의결과등에따라개발계획이변경되는경우를포함합니다
신규투자사업에 대한 타당성조사(최종보고서)_v10_클린아이공시.hwp
_v10_클린아이공시.hwp") 신규투자사업에 대한 타당성 조사 (요약본) 2015. 4. 지방공기업평가원 제주관광공사가부족한쇼핑인프라를보완하고, 수익을제주관광진흥에재투자하여 관광산업활성화와관광마케팅재원확보 라는양대목적달성에기여하고공기업으로서사회적책임을다하고자시내면세점사업에투자하려는의사결정에대한타당도는전반적으로볼때 긍정 으로평가할수있음 역할및필요성 대내 외환경 정책및법률 경제성기대효과
신규투자사업에 대한 타당성 조사 (요약본) 2015. 4. 지방공기업평가원 제주관광공사가부족한쇼핑인프라를보완하고, 수익을제주관광진흥에재투자하여 관광산업활성화와관광마케팅재원확보 라는양대목적달성에기여하고공기업으로서사회적책임을다하고자시내면세점사업에투자하려는의사결정에대한타당도는전반적으로볼때 긍정 으로평가할수있음 역할및필요성 대내 외환경 정책및법률 경제성기대효과
자율주행자동차기술및시장동향 자율주행자동차요소기술 크게네가지영역즉 인지기술 판단기술 차량이동제어기술 기술로구분 인지기술에는레이더 주변인지기술 카메라 지구항법위성시스템등이속함 판단기술에는결정론적 확률론적방법과학습 비학습기반알고리즘과같은 인공지능기술이해당 제어기술에는엑츄에이
 3 117 자율주행자동차국내외입법비교분석과정책대안 자율주행자동차의운행과책임 신기술과제도화의역할 다양한정보통신기술의기존산업적용을위하여 기존의정태적법제도에대한유연성 이요구 산업 기술분야의법제도는기술혁신의엑셀레이터기능을함 자율주행 자동차관련분야역시신기술개발 특히정보통신분야기술 로인한기존 법제도의변화를요구 자율주행자동차분야역시신기술의적용으로기존자동차산업과관련된 기존내용의변화를요구
3 117 자율주행자동차국내외입법비교분석과정책대안 자율주행자동차의운행과책임 신기술과제도화의역할 다양한정보통신기술의기존산업적용을위하여 기존의정태적법제도에대한유연성 이요구 산업 기술분야의법제도는기술혁신의엑셀레이터기능을함 자율주행 자동차관련분야역시신기술개발 특히정보통신분야기술 로인한기존 법제도의변화를요구 자율주행자동차분야역시신기술의적용으로기존자동차산업과관련된 기존내용의변화를요구
위탁연구 기능경기시스템선진화방안
 위탁연구 2016-4 기능경기시스템선진화방안 제출문 한국산업인력공단이사장귀하 이보고서를한국산업인력공단위탁연구과제 기능 경기시스템선진화방안 의최종보고서로제출합니 다. 2016. 6 한국고용노사관계학회 회장조준모 연구진연구책임자 : 고혜원 ( 한국직업능력개발원선임연구위원 ) 참여연구자 : 김봄이 ( 한국직업능력개발원부연구위원 ) 연구보조원 : 전희선 차례 i
위탁연구 2016-4 기능경기시스템선진화방안 제출문 한국산업인력공단이사장귀하 이보고서를한국산업인력공단위탁연구과제 기능 경기시스템선진화방안 의최종보고서로제출합니 다. 2016. 6 한국고용노사관계학회 회장조준모 연구진연구책임자 : 고혜원 ( 한국직업능력개발원선임연구위원 ) 참여연구자 : 김봄이 ( 한국직업능력개발원부연구위원 ) 연구보조원 : 전희선 차례 i
소준섭
 2014 년미얀마의국가경쟁력평가와정책적시사점 : 세계경쟁력지수 (GCI) 분석을통한개발협력분야모색 원순구 목 차 Ⅰ. 서론 Ⅱ. 미얀마및한국의세계경쟁력지수 (GCI) 분석 1. 세계경쟁력지수의구조및측정 2. 미얀마국가경쟁력지수평가분석 3. 한국의국가경쟁력지수분석 Ⅲ. 양국의경쟁력지수 GAP 분석을통한개발협력분야모색 1. 한국과미얀마의부문별경쟁력지수 GAP 분석
2014 년미얀마의국가경쟁력평가와정책적시사점 : 세계경쟁력지수 (GCI) 분석을통한개발협력분야모색 원순구 목 차 Ⅰ. 서론 Ⅱ. 미얀마및한국의세계경쟁력지수 (GCI) 분석 1. 세계경쟁력지수의구조및측정 2. 미얀마국가경쟁력지수평가분석 3. 한국의국가경쟁력지수분석 Ⅲ. 양국의경쟁력지수 GAP 분석을통한개발협력분야모색 1. 한국과미얀마의부문별경쟁력지수 GAP 분석
<312E20C0AFC0CFC4B3B5E55F5352444320C0FCC0DAB1E2C6C720B1B8B8C5BBE7BEE7BCAD2E687770>
 페이지 2 / 6 첨부 1. 공급품 목록 및 납기일정 번호 품명 모델명/사양 Vendor 단위 수량 납기 비고 1 (샘플기판) 6Layer, FR-4, 1.6T, 1온스, 2 (샘플기판) 3 (샘플기판) 4 (샘플기판) 5 (샘플기판) FRONT PANEL BOARD 3종 1. 샘플기판은 Board 별 성능시험용 2. 샘플 기판 후 Board 별 육안점검 및
페이지 2 / 6 첨부 1. 공급품 목록 및 납기일정 번호 품명 모델명/사양 Vendor 단위 수량 납기 비고 1 (샘플기판) 6Layer, FR-4, 1.6T, 1온스, 2 (샘플기판) 3 (샘플기판) 4 (샘플기판) 5 (샘플기판) FRONT PANEL BOARD 3종 1. 샘플기판은 Board 별 성능시험용 2. 샘플 기판 후 Board 별 육안점검 및
레이아웃 1
 01 2015 August vol.04 융합Weekly 발행일_ 2015.08.31 발행처_융합연구정책센터 TIP 자율주행자동차 동향과 전망 이재관 자동차부품연구원 선정 사유 (사회 이슈) 사회와 공존하는 이동성에 대한 새로운 패러다임으로의 전환과 급속한 고령화에 따른 노인 운전자를 위한 안전대책 요구 - 미래사회 이동성 키워드는 고안전, 친환경, 친인간,
01 2015 August vol.04 융합Weekly 발행일_ 2015.08.31 발행처_융합연구정책센터 TIP 자율주행자동차 동향과 전망 이재관 자동차부품연구원 선정 사유 (사회 이슈) 사회와 공존하는 이동성에 대한 새로운 패러다임으로의 전환과 급속한 고령화에 따른 노인 운전자를 위한 안전대책 요구 - 미래사회 이동성 키워드는 고안전, 친환경, 친인간,
 정책연구 16-08 신기술과소비자법제연구 Ⅰ: 자율주행자동차 김성천 ⅰ 머리말 자율주행자동차는운전자의조작없이자동차스스로운행이가능한신기술의산물로서, 이동성혁명을주도하여교통소비자의생활에큰영향을줄것입니다. 자율주행자동차는오염제로, 사고제로, 소유제로등사회경제적으로긍정적영향을미칠것으로예상되지만프라이버시침해, 사이버보안및안전문제, 사고발생시책임소재불확실등의부정적영향도예상됩니다.
정책연구 16-08 신기술과소비자법제연구 Ⅰ: 자율주행자동차 김성천 ⅰ 머리말 자율주행자동차는운전자의조작없이자동차스스로운행이가능한신기술의산물로서, 이동성혁명을주도하여교통소비자의생활에큰영향을줄것입니다. 자율주행자동차는오염제로, 사고제로, 소유제로등사회경제적으로긍정적영향을미칠것으로예상되지만프라이버시침해, 사이버보안및안전문제, 사고발생시책임소재불확실등의부정적영향도예상됩니다.
.....hwp
 미국노동법제의이해 PRIMER ON AMERICAN LABOR LAW, third edition by William B. Gould IV Copyright 1993 by Massachusetts Institute of Technology All rights reserved. Korean translation copyright 2003 by Korea Labor
미국노동법제의이해 PRIMER ON AMERICAN LABOR LAW, third edition by William B. Gould IV Copyright 1993 by Massachusetts Institute of Technology All rights reserved. Korean translation copyright 2003 by Korea Labor
<C3E6B3B2B1B3C0B0313832C8A32DC5BEC0E7BFEB28C0DBB0D4292D332E706466>
 11-8140242-000001-08 2013-927 2013 182 2013 182 Contents 02 16 08 10 12 18 53 25 32 63 Summer 2 0 1 3 68 40 51 57 65 72 81 90 97 103 109 94 116 123 130 140 144 148 118 154 158 163 1 2 3 4 5 8 SUMMER
11-8140242-000001-08 2013-927 2013 182 2013 182 Contents 02 16 08 10 12 18 53 25 32 63 Summer 2 0 1 3 68 40 51 57 65 72 81 90 97 103 109 94 116 123 130 140 144 148 118 154 158 163 1 2 3 4 5 8 SUMMER
제 2 편채권총론 제1장채권의목적 제2장채권의효력 제3장채권의양도와채무인수 제4장채권의소멸 제5장수인의채권자및채무자
 제 2 편채권총론 제1장채권의목적 제2장채권의효력 제3장채권의양도와채무인수 제4장채권의소멸 제5장수인의채권자및채무자 문 1] 채권의목적에관한다음설명중가장옳지않은것은? - 1 - 정답 : 5 문 2] 이행지체에관한다음의설명중가장옳지않은것은? - 2 - 정답 : 4 문 3] 채무불이행으로인한손해배상청구에관한다음설명중옳은것을모두고른것은?
제 2 편채권총론 제1장채권의목적 제2장채권의효력 제3장채권의양도와채무인수 제4장채권의소멸 제5장수인의채권자및채무자 문 1] 채권의목적에관한다음설명중가장옳지않은것은? - 1 - 정답 : 5 문 2] 이행지체에관한다음의설명중가장옳지않은것은? - 2 - 정답 : 4 문 3] 채무불이행으로인한손해배상청구에관한다음설명중옳은것을모두고른것은?
<BBE7C8B8C0FBC0C7BBE7BCD2C5EBBFACB1B820C3D6C1BEBAB8B0EDBCAD2E687770>
 국립국어원 2007-01-42 사회적의사소통연구 : 성차별적언어표현사례조사및대안마련을위한연구 국립국어원 한국여성정책연구원 제출문 국립국어원장귀하 국립국어원의국고보조금지원으로수행한 사회적의사 소통연구 : 성차별적언어표현사례조사및대안마련을위한 연구 의결과보고서를작성하여제출합니다. 한국여성정책연구원 안상수 백영주, 양애경, 강혜란, 윤정주 목 차 연구개요 선행연구의고찰
국립국어원 2007-01-42 사회적의사소통연구 : 성차별적언어표현사례조사및대안마련을위한연구 국립국어원 한국여성정책연구원 제출문 국립국어원장귀하 국립국어원의국고보조금지원으로수행한 사회적의사 소통연구 : 성차별적언어표현사례조사및대안마련을위한 연구 의결과보고서를작성하여제출합니다. 한국여성정책연구원 안상수 백영주, 양애경, 강혜란, 윤정주 목 차 연구개요 선행연구의고찰
경북자동차부품관련연구소의효율적 운영방안
 2009-046 경북자동차부품관련연구소의효율적 운영방안 차례 표차례 그림차례 요약 1. 연구배경및목적,,, IT. 3,.,.. 2. 국내 지역자동차산업현황 2007 20.3 GDP 2.5%. 9%, 12%, 13%, 07 409, 285 5, 147 2.9. 8.6%, 7.0%, 4.5%, i . ( ) ( ) ( ) 4,577 277,319 38,865,170
2009-046 경북자동차부품관련연구소의효율적 운영방안 차례 표차례 그림차례 요약 1. 연구배경및목적,,, IT. 3,.,.. 2. 국내 지역자동차산업현황 2007 20.3 GDP 2.5%. 9%, 12%, 13%, 07 409, 285 5, 147 2.9. 8.6%, 7.0%, 4.5%, i . ( ) ( ) ( ) 4,577 277,319 38,865,170
장애인건강관리사업
 장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
Microsoft Word - PLC제어응용-2차시.doc
 과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
과정명 PLC 제어응용차시명 2 차시. 접점명령 학습목표 1. 연산개시명령 (LOAD, LOAD NOT) 에대하여설명할수있다. 2. 직렬접속명령 (AND, AND NOT) 에대하여설명할수있다. 3. 병렬접속명령 (OR, OR NOT) 에대하여설명할수있다. 4.PLC의접점명령을가지고간단한프로그램을작성할수있다. 학습내용 1. 연산개시명령 1) 연산개시명령 (LOAD,
 2012-82 The Study on the Alternative Plans for Conservation and Effective Use in Palgong-Mountain , i ii iii iv v ? vi vii 제 절연구배경및목적 연구배경과필요성 연구목적 제 절연구범위 연구내용및방법 연구범위 연구내용 연구방법 제 절선행연구고찰 주요개념 관련연구
2012-82 The Study on the Alternative Plans for Conservation and Effective Use in Palgong-Mountain , i ii iii iv v ? vi vii 제 절연구배경및목적 연구배경과필요성 연구목적 제 절연구범위 연구내용및방법 연구범위 연구내용 연구방법 제 절선행연구고찰 주요개념 관련연구
여수신북항(1227)-출판보고서-100부.hwp
-출판보고서-100부.hwp") 2012 년도타당성재조사보고서 여수신북항건설사업 2012. 10 요약 요약 1. 사업의개요 가. 추진배경및목적 2012( 1), 2) ) 164 11. -.,,. (2008.10.23, ) 3). 1),,,,,,,. 2),,,,. 3) 2013 7 2012(, ) 11, ( A,B,C,W ).. 나. 사업내용및추진경위 : : : 1,103m, 1,270m,
2012 년도타당성재조사보고서 여수신북항건설사업 2012. 10 요약 요약 1. 사업의개요 가. 추진배경및목적 2012( 1), 2) ) 164 11. -.,,. (2008.10.23, ) 3). 1),,,,,,,. 2),,,,. 3) 2013 7 2012(, ) 11, ( A,B,C,W ).. 나. 사업내용및추진경위 : : : 1,103m, 1,270m,
외국인투자유치성과평가기준개발
 2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
<37322DC0CEB1C7BAB8C8A3BCF6BBE7C1D8C4A2C0C7B0DFC7A5B8ED5B315D2E687770>
 인권보호수사준칙개정안에 대한 국가인권위원회의 의견 국가인권위원회는 국가인권위원회법 제20조 제1항에 따른 법무부의 인권보호 수사준칙개정안에 대한 국가인권위원회의 의견 요청에 대하여 검토한 결과 국가인권위원회법 제19조 제1호에 의하여 아래와 같이 의견을 표명한다. 1. 개정안 제12조의 체포 등에 대한 신속한 통지조항에서 지체없이 라는 용어는 명확성의 원칙을
인권보호수사준칙개정안에 대한 국가인권위원회의 의견 국가인권위원회는 국가인권위원회법 제20조 제1항에 따른 법무부의 인권보호 수사준칙개정안에 대한 국가인권위원회의 의견 요청에 대하여 검토한 결과 국가인권위원회법 제19조 제1호에 의하여 아래와 같이 의견을 표명한다. 1. 개정안 제12조의 체포 등에 대한 신속한 통지조항에서 지체없이 라는 용어는 명확성의 원칙을
 ii iv 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 2 3 4 5 1 3 6 37 제품군 제품분류 39 제출물관리대장 41 43 45 47 < 접수번호 > 관리번호 평가결과보고서 < 평가대상제품명 > 년월일 < 평가기관명 > 49 제 1 장개요 o 일반적으로다음의사항을포함한다. - 정보보호제품평가인증관련규정 (
ii iv 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 2 3 4 5 1 3 6 37 제품군 제품분류 39 제출물관리대장 41 43 45 47 < 접수번호 > 관리번호 평가결과보고서 < 평가대상제품명 > 년월일 < 평가기관명 > 49 제 1 장개요 o 일반적으로다음의사항을포함한다. - 정보보호제품평가인증관련규정 (
2002report hwp
 2002 연구보고서 220-11 초 중등교육과정의성인지적개편을위한양성평등교육내용개발 한국여성개발원 발간사 양성평등교육내용개발진 연구요약 1. 연구목적 2. 연구방법 3. 7 차교육과정및교과서내용분석 가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 4. 각교과별양성평등교육내용개발가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 5. 결론 목 차 Ⅰ 서론
2002 연구보고서 220-11 초 중등교육과정의성인지적개편을위한양성평등교육내용개발 한국여성개발원 발간사 양성평등교육내용개발진 연구요약 1. 연구목적 2. 연구방법 3. 7 차교육과정및교과서내용분석 가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 4. 각교과별양성평등교육내용개발가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 5. 결론 목 차 Ⅰ 서론
임베디드2014(가을)
") 2014 Autumn Vol.8 www.givet.re.kr 2014 Autumn News Letter 2014 Autumn Vol.8 News Letter CONTENTS GIVET Autumn 04 05 이천십사년 가을호 뉴스레터 FOCUS_ 2014년 기업지원사업 성과 기업지원성과 1 2013 경북디지털기기부품산업 패키지역량강화사업 사업기간 : 2013년
2014 Autumn Vol.8 www.givet.re.kr 2014 Autumn News Letter 2014 Autumn Vol.8 News Letter CONTENTS GIVET Autumn 04 05 이천십사년 가을호 뉴스레터 FOCUS_ 2014년 기업지원사업 성과 기업지원성과 1 2013 경북디지털기기부품산업 패키지역량강화사업 사업기간 : 2013년
210 법학논고제 50 집 ( )
") 경북대학교법학연구원 법학논고 제 50 집 (2015.05) 209~236 면. Kyungpook Natl. Univ. Law Journal Vol.50 (May 2015) pp.209~236. 주제어 : 산업재해보상보험, 급여지급체계, 업무상재해, 휴업급여, 장해급여, 상병보상연금, 중복급여, 급여의조정 투고일 : 2015.04.30 / 심사일 : 2015.05.15
경북대학교법학연구원 법학논고 제 50 집 (2015.05) 209~236 면. Kyungpook Natl. Univ. Law Journal Vol.50 (May 2015) pp.209~236. 주제어 : 산업재해보상보험, 급여지급체계, 업무상재해, 휴업급여, 장해급여, 상병보상연금, 중복급여, 급여의조정 투고일 : 2015.04.30 / 심사일 : 2015.05.15
그린홈이용실태및만족도조사
 2009 년도연구용역보고서 그린홈이용실태및 만족도설문조사 - 2009. 11. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 이화여자대학교소비자학과교수정순희 그린홈이용실태및만족도 설문조사 2009. 11. 책임연구원 정순희 ( 이화여자대학교소비자학과교수
2009 년도연구용역보고서 그린홈이용실태및 만족도설문조사 - 2009. 11. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 이화여자대학교소비자학과교수정순희 그린홈이용실태및만족도 설문조사 2009. 11. 책임연구원 정순희 ( 이화여자대학교소비자학과교수
선진사례집(0529)
") Contents Contents 1 8 9 10 2 11 선진사례집(0529) 2012.5.29 13:30 페이지12 MAC-3 추진내용 GPS로부터 자동차의 주행 스피드를 계산하여 교통 정보 수집 일본 노무라연구소는 스마트폰형 내비게이션 서비스인 전력안내!내비 를 활용하여 2011년 일본 대지진시 도로교통 체증 피해 최소화 - 교통 체증 감소 효과 및
Contents Contents 1 8 9 10 2 11 선진사례집(0529) 2012.5.29 13:30 페이지12 MAC-3 추진내용 GPS로부터 자동차의 주행 스피드를 계산하여 교통 정보 수집 일본 노무라연구소는 스마트폰형 내비게이션 서비스인 전력안내!내비 를 활용하여 2011년 일본 대지진시 도로교통 체증 피해 최소화 - 교통 체증 감소 효과 및
3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 -
 안양시도로조명시설설치및관리에관한조례안 1. 제정이유 2. 주요내용 - 1 - 3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 - 안양시도로조명시설설치및관리에관한조례안 - 3 - ➃ - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 별표 1 도로및교통의종류에따른도로조명등급 ( 제 6 조관련 ),,.,,,,,
안양시도로조명시설설치및관리에관한조례안 1. 제정이유 2. 주요내용 - 1 - 3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 - 안양시도로조명시설설치및관리에관한조례안 - 3 - ➃ - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 별표 1 도로및교통의종류에따른도로조명등급 ( 제 6 조관련 ),,.,,,,,
교육학석사학위논문 윤리적입장에따른학교상담자의 비밀보장예외판단차이분석 년 월 서울대학교대학원 교육학과교육상담전공 구승영
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 목재제품의종류 국내목재산업현황 목재산업트렌드분석및미래시
 목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
핵 심 교 양 1 학년 2 학년 3 학년합계 문학과예술 역사와철학 사회와이념 선택 교양학점계 학년 2 학년 3 학년합계비고 14 (15) 13 (
 13 (") 1 학년 2 학년 3 학년 합계 6 5 11 5 5 16 문학과예술 핵 심 교 역사와철학 사회와이념 3 3 3 양 3 3 3 3 3 3 선택 4 4 1 1 3 3 6 11 교양학점계 12 12 24 5 1 6 3 3 6 36 ㆍ제 2 외국어이수규정 이수규정 또는 영역에서 과목 학점 이수하고 수량적석과추론 과학적사고와실험 에서 과목 학점 이수해도됨 외국어및고전어
1 학년 2 학년 3 학년 합계 6 5 11 5 5 16 문학과예술 핵 심 교 역사와철학 사회와이념 3 3 3 양 3 3 3 3 3 3 선택 4 4 1 1 3 3 6 11 교양학점계 12 12 24 5 1 6 3 3 6 36 ㆍ제 2 외국어이수규정 이수규정 또는 영역에서 과목 학점 이수하고 수량적석과추론 과학적사고와실험 에서 과목 학점 이수해도됨 외국어및고전어
C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 개관 완성차브랜드현황 협력업체 ( 부
 Global Market Report 17-039 Global Market Report 태국자동차산업글로벌밸류체인 (GVC) 진출방안 방콕무역관 C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 13 3. 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 16 1. 개관
Global Market Report 17-039 Global Market Report 태국자동차산업글로벌밸류체인 (GVC) 진출방안 방콕무역관 C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 13 3. 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 16 1. 개관
 발간등록번호 11-1541000-001187-01 농림수산사업성과평가 [ 식품유통재정사업 ] 연구기관 : 한국정책평가연구원 2011. 12 제출문 농림수산식품부장관귀하본보고서를 농림수산사업성과평가 의최종보고서로제출합니다. 2011. 12. 연구진 연구총괄박경귀 ( 한국정책평가연구원원장 ) 연구책임자윤인주 ( 한국정책평가연구원연구위원 ) 공동연구원송재옥 (
발간등록번호 11-1541000-001187-01 농림수산사업성과평가 [ 식품유통재정사업 ] 연구기관 : 한국정책평가연구원 2011. 12 제출문 농림수산식품부장관귀하본보고서를 농림수산사업성과평가 의최종보고서로제출합니다. 2011. 12. 연구진 연구총괄박경귀 ( 한국정책평가연구원원장 ) 연구책임자윤인주 ( 한국정책평가연구원연구위원 ) 공동연구원송재옥 (
1. 상고이유 제1점에 대하여 구 도시 및 주거환경정비법(2009. 2. 6. 법률 제9444호로 개정되기 전의 것, 이하 구 도시정비법 이라 한다) 제4조 제1항, 제3항은 시 도지사 또는 대도시의 시장이 정비구 역을 지정하거나 대통령령이 정하는 경미한 사항을 제외한
 제4조 제1항, 제3항은 시 도지사 또는 대도시의 시장이 정비구 역을 지정하거나 대통령령이 정하는 경미한 사항을 제외한") 대 법 원 제 1 부 판 결 사 건 2012두6605 사업시행계획무효확인등 원고, 상고인 원고 1 외 1인 원고들 소송대리인 법무법인(유한) 태평양 담당변호사 이인재 외 2인 피고, 피상고인 서울특별시 종로구청장 외 1인 소송대리인 정부법무공단 외 3인 원 심 판 결 서울고등법원 2012. 2. 2. 선고 2011누16133 판결 판 결 선 고 2015. 4.
대 법 원 제 1 부 판 결 사 건 2012두6605 사업시행계획무효확인등 원고, 상고인 원고 1 외 1인 원고들 소송대리인 법무법인(유한) 태평양 담당변호사 이인재 외 2인 피고, 피상고인 서울특별시 종로구청장 외 1인 소송대리인 정부법무공단 외 3인 원 심 판 결 서울고등법원 2012. 2. 2. 선고 2011누16133 판결 판 결 선 고 2015. 4.
내지(교사용) 4-6부
 4-6부") Chapter5 140 141 142 143 144 145 146 147 148 01 02 03 04 05 06 07 08 149 활 / 동 / 지 2 01 즐겨 찾는 사이트와 찾는 이유는? 사이트: 이유: 02 아래는 어느 외국계 사이트의 회원가입 화면이다. 국내의 일반적인 회원가입보다 절차가 간소하거나 기입하지 않아도 되는 개인정보 항목이 있다면 무엇인지
Chapter5 140 141 142 143 144 145 146 147 148 01 02 03 04 05 06 07 08 149 활 / 동 / 지 2 01 즐겨 찾는 사이트와 찾는 이유는? 사이트: 이유: 02 아래는 어느 외국계 사이트의 회원가입 화면이다. 국내의 일반적인 회원가입보다 절차가 간소하거나 기입하지 않아도 되는 개인정보 항목이 있다면 무엇인지
<BBEAC0E7BAB8C7E8C1A6B5B52E687770>
 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
2),, 312, , 59. 3),, 7, 1996, 30.
,, 312, , 59. 3),, 7, 1996, 30.") *,.1) 1),. 2),, 312, 2000. 3., 59. 3),, 7, 1996, 30. 4).. 1. 2 ( :,,, 2009). 5) 2004. 2. 27. 2003 7507 ; 1985. 6. 25. 85 660 ; 1987. 2. 10. 86 2338. 6) 1987. 7. 21. 87 1091. 7) 2006. 4. 14. 2006 734. 8),
*,.1) 1),. 2),, 312, 2000. 3., 59. 3),, 7, 1996, 30. 4).. 1. 2 ( :,,, 2009). 5) 2004. 2. 27. 2003 7507 ; 1985. 6. 25. 85 660 ; 1987. 2. 10. 86 2338. 6) 1987. 7. 21. 87 1091. 7) 2006. 4. 14. 2006 734. 8),
i
 i ii iii iv v vi 요약 요약 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 2 장기존연구검토및연구방향설정 제1절수송분담구조관련지표들제2절수송실적관련자료현황제3절표본조사에근거한수송분담률산정제4절연구방향설정
i ii iii iv v vi 요약 요약 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 2 장기존연구검토및연구방향설정 제1절수송분담구조관련지표들제2절수송실적관련자료현황제3절표본조사에근거한수송분담률산정제4절연구방향설정
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론
 이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
2 Journal of Disaster Prevention
 VOL.13 No.4 2011 08 JOURNAL OF DISASTER PREVENTION CONTENTS XXXXXX XXXXXX 2 Journal of Disaster Prevention 3 XXXXXXXXXXXXXXX XXXXXXXXXXXXXX 4 Journal of Disaster Prevention 5 6 Journal of Disaster Prevention
VOL.13 No.4 2011 08 JOURNAL OF DISASTER PREVENTION CONTENTS XXXXXX XXXXXX 2 Journal of Disaster Prevention 3 XXXXXXXXXXXXXXX XXXXXXXXXXXXXX 4 Journal of Disaster Prevention 5 6 Journal of Disaster Prevention
제29권 11호 통권 648호.hwp
 자율주행자동차의기기전자인증체계도입을위한법 제도개선방안제 29 권 11호통권 648호 자율주행자동차의기기전자인증체계도입을위한법 제도개선방안 정민호 * 1) 자율주행자동차시대는머지않은시기에도래할것이다. 자율주행자동차시대를대비하기위한관련법제도의개선방안연구는시험운행을위한영역, 상용화를위한영역, 협력적지능형교통체계를위한기기전자인증영역으로나눌수있다. 이러한세가지영역중시험운행을위한법령개정논의는이미해외나우리나라모두입법을통해해결되었으며,
자율주행자동차의기기전자인증체계도입을위한법 제도개선방안제 29 권 11호통권 648호 자율주행자동차의기기전자인증체계도입을위한법 제도개선방안 정민호 * 1) 자율주행자동차시대는머지않은시기에도래할것이다. 자율주행자동차시대를대비하기위한관련법제도의개선방안연구는시험운행을위한영역, 상용화를위한영역, 협력적지능형교통체계를위한기기전자인증영역으로나눌수있다. 이러한세가지영역중시험운행을위한법령개정논의는이미해외나우리나라모두입법을통해해결되었으며,
저작자표시 - 비영리 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물
 저작자표시 - 비영리 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 귀하는, 이저작물의재이용이나배포의경우, 이저작물에적용된이용허락조건을명확하게나타내어야합니다.
저작자표시 - 비영리 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 귀하는, 이저작물의재이용이나배포의경우, 이저작물에적용된이용허락조건을명확하게나타내어야합니다.
2 D drive L L 8 4 CONTENTS Mercedes-Benz Truck Magazine no.26 cover story Winter Vol T F
 Mercedes-Benz Truck Magazine 2016 Winter - vol.26 Mercedes-Benz Truck Magazine - vol.26-2016. Winter 2 D drive 06 3551L 8 4 3551L 8 4 CONTENTS Mercedes-Benz Truck Magazine no.26 cover story 50 30 26 2016
Mercedes-Benz Truck Magazine 2016 Winter - vol.26 Mercedes-Benz Truck Magazine - vol.26-2016. Winter 2 D drive 06 3551L 8 4 3551L 8 4 CONTENTS Mercedes-Benz Truck Magazine no.26 cover story 50 30 26 2016
G lobal M arket Report 유럽재정위기 2 년, 주요국변화동향
 G lobal M arket Report 12-012 2012.06.14 유럽재정위기 2 년, 주요국변화동향 C O N T E N T S 목 차 1. EU 총괄 / 2. 그리스 / 3. 독일 / 4. 스페인 / 5. 영국 / 5. 이탈리아 / 5. 프랑스 / 유럽재정위기 2 년, 주요국변화동향 요약 4 Global Market Report 12-012 5 Global
G lobal M arket Report 12-012 2012.06.14 유럽재정위기 2 년, 주요국변화동향 C O N T E N T S 목 차 1. EU 총괄 / 2. 그리스 / 3. 독일 / 4. 스페인 / 5. 영국 / 5. 이탈리아 / 5. 프랑스 / 유럽재정위기 2 년, 주요국변화동향 요약 4 Global Market Report 12-012 5 Global
자산관리서비스선진화방안(인쇄).hwp
.hwp") 경영보고서 2009-2 자산관리서비스활성화방안 보험연구원 Ⅰ. 서론 2 경영보고서 2009-02 Ⅱ. 자산관리서비스에대한논리적검토 요약 3 4 경영보고서 2009-02 Ⅲ. 국내외자산관리서비스현황 요약 5 운용전략 운용전략 자산관리서비스유형 유가증권 뮤추얼펀드 상장지수펀드 운용전략 1 운용전략 2 SMA MDA MDA 6 경영보고서 2009-02
경영보고서 2009-2 자산관리서비스활성화방안 보험연구원 Ⅰ. 서론 2 경영보고서 2009-02 Ⅱ. 자산관리서비스에대한논리적검토 요약 3 4 경영보고서 2009-02 Ⅲ. 국내외자산관리서비스현황 요약 5 운용전략 운용전략 자산관리서비스유형 유가증권 뮤추얼펀드 상장지수펀드 운용전략 1 운용전략 2 SMA MDA MDA 6 경영보고서 2009-02
UDI 이슈리포트제 23 호 도요타리콜사태의영향과 울산의자동차산업 경제산업연구실문상식부연구위원 052) / < 목차 > 요약 1 Ⅰ. 연구배경및목적 3 Ⅱ. 도요타사태의원인과시사점 5 Ⅲ. 울산자동차
 / < 목차 > 요약 1 Ⅰ. 연구배경및목적 3 Ⅱ. 도요타사태의원인과시사점 5 Ⅲ. 울산자동차") UDI 이슈리포트제 23 호 도요타리콜사태의영향과 울산의자동차산업 2010. 5.14. 경제산업연구실문상식부연구위원 052)283-7724 / mossmoon@udi.re.kr < 목차 > 요약 1 Ⅰ. 연구배경및목적 3 Ⅱ. 도요타사태의원인과시사점 5 Ⅲ. 울산자동차산업과도요타사태의영향 14 Ⅳ. 주요결론및시사점 35 도요타리콜사태의영향과울산의자동차산업
UDI 이슈리포트제 23 호 도요타리콜사태의영향과 울산의자동차산업 2010. 5.14. 경제산업연구실문상식부연구위원 052)283-7724 / mossmoon@udi.re.kr < 목차 > 요약 1 Ⅰ. 연구배경및목적 3 Ⅱ. 도요타사태의원인과시사점 5 Ⅲ. 울산자동차산업과도요타사태의영향 14 Ⅳ. 주요결론및시사점 35 도요타리콜사태의영향과울산의자동차산업
< C0DAC0B2C5BDB1B820BFEEBFB520B8DEB4BABEF32D33C2F720C6EDC1FD2E687770>
 과학영재의창의적탐구능력배양을위한 R&E 프로그램기획 운영핸드북 Handbook of Annual Planning and Implementing R&E Program for the Talented 2017 과학영재창의연구 (R&E) 지원센터 이핸드북은과학고와과학영재학교의연간 R&E 프로그램기획 운영을효과적으로지원하기위해개발된것으로, 한국과학창의재단지정과학영재창의연구
과학영재의창의적탐구능력배양을위한 R&E 프로그램기획 운영핸드북 Handbook of Annual Planning and Implementing R&E Program for the Talented 2017 과학영재창의연구 (R&E) 지원센터 이핸드북은과학고와과학영재학교의연간 R&E 프로그램기획 운영을효과적으로지원하기위해개발된것으로, 한국과학창의재단지정과학영재창의연구
농림축산식품부장관귀하 본보고서를 미생물을활용한친환경작물보호제및비료의제형화와현장적용매뉴 얼개발 ( 개발기간 : ~ ) 과제의최종보고서로제출합니다 주관연구기관명 : 고려바이오주식회사 ( 대표자 ) 김영권 (
 과제의최종보고서로제출합니다 주관연구기관명 : 고려바이오주식회사 ( 대표자 ) 김영권 (") 농림축산식품부장관귀하 본보고서를 미생물을활용한친환경작물보호제및비료의제형화와현장적용매뉴 얼개발 ( 개발기간 :2014. 7. 29 ~ 2016. 7. 28.) 과제의최종보고서로제출합니다. 2016. 7. 28. 주관연구기관명 : 고려바이오주식회사 ( 대표자 ) 김영권 ( 인 ) 협동연구기관명 : 목원대학교산학협력단 ( 대표자 ) 고대식 ( 인 ) 협동연구기관명
농림축산식품부장관귀하 본보고서를 미생물을활용한친환경작물보호제및비료의제형화와현장적용매뉴 얼개발 ( 개발기간 :2014. 7. 29 ~ 2016. 7. 28.) 과제의최종보고서로제출합니다. 2016. 7. 28. 주관연구기관명 : 고려바이오주식회사 ( 대표자 ) 김영권 ( 인 ) 협동연구기관명 : 목원대학교산학협력단 ( 대표자 ) 고대식 ( 인 ) 협동연구기관명
I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 )
 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 )") KS 인증공장심사항목해설서 2013. 3 한국표준협회 I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 ) 4-2. (4 ) 5. (7 ) 5-1.
KS 인증공장심사항목해설서 2013. 3 한국표준협회 I (34 ) 1. (10 ) 1-1. (2 ) 1-2. (1 ) 1-3. (2 ) 1-4. (2 ) 1-5. (1 ) 1-6. (2 ) 2. (8 ) 2-1. (3 ) 2-2. (5 ) 3. (3 ) 3-1. (1 ) 3-2. (2 ) 4. (6 ) 4-1. (2 ) 4-2. (4 ) 5. (7 ) 5-1.
내부정보관리규정
 화우테크놀러지 내부정보관리규정입니다. 내부정보관리규정은코스닥시장공시규정제 45조에따라신속 / 정확한공시및임원 / 직원의내부자거래방지를위하여회사내부정보의종합관리및적절한공개등을목적으로제정되어졌습니다. 내부정보관리규정 내부정보관리규정 제정 2009. 09. 01 제1장총칙 제1 조( 목적) 이규정은 자본시장과금융투자업에관한법률 ( 이하 법 이 라한다) 및제반법규에따른신속
화우테크놀러지 내부정보관리규정입니다. 내부정보관리규정은코스닥시장공시규정제 45조에따라신속 / 정확한공시및임원 / 직원의내부자거래방지를위하여회사내부정보의종합관리및적절한공개등을목적으로제정되어졌습니다. 내부정보관리규정 내부정보관리규정 제정 2009. 09. 01 제1장총칙 제1 조( 목적) 이규정은 자본시장과금융투자업에관한법률 ( 이하 법 이 라한다) 및제반법규에따른신속
슬라이드 1
 마이크로컨트롤러 2 (MicroController2) 2 강 ATmega128 의 external interrupt 이귀형교수님 학습목표 interrupt 란무엇인가? 기본개념을알아본다. interrupt 중에서가장사용하기쉬운 external interrupt 의사용방법을학습한다. 1. Interrupt 는왜필요할까? 함수동작을추가하여실행시키려면? //***
마이크로컨트롤러 2 (MicroController2) 2 강 ATmega128 의 external interrupt 이귀형교수님 학습목표 interrupt 란무엇인가? 기본개념을알아본다. interrupt 중에서가장사용하기쉬운 external interrupt 의사용방법을학습한다. 1. Interrupt 는왜필요할까? 함수동작을추가하여실행시키려면? //***
목 차 주요내용요약 1 Ⅰ. 서론 3 Ⅱ. 스마트그리드산업동향 6 1. 특징 2. 시장동향및전망 Ⅲ. 주요국별스마트그리드산업정책 17 Ⅳ. 미국의스마트그리드산업동향 스마트그리드산업구조 2. 스마트그리드가치사슬 3. 스마트그리드보급현황 Ⅴ. 미국의스마트그리드정
 2012-02 2012. 1. 13 미국스마트그리드산업의 Value Chain 및정책동향 주요내용요약 서론 스마트그리드산업동향 주요국별스마트그리드산업정책 미국의스마트그리드산업동향 미국의스마트그리드정책동향 21세기스마트그리드산업전략 결론 작성김정욱책임연구원, 미국거점 kjwcow@kiat.or,kr +1-404-477-3288 감수조영희팀장, 국제협력기획팀 yhcho@kiat.or.kr
2012-02 2012. 1. 13 미국스마트그리드산업의 Value Chain 및정책동향 주요내용요약 서론 스마트그리드산업동향 주요국별스마트그리드산업정책 미국의스마트그리드산업동향 미국의스마트그리드정책동향 21세기스마트그리드산업전략 결론 작성김정욱책임연구원, 미국거점 kjwcow@kiat.or,kr +1-404-477-3288 감수조영희팀장, 국제협력기획팀 yhcho@kiat.or.kr
조사보고서 복합금융그룹의리스크와감독
 조사보고서 2009-6 복합금융그룹의리스크와감독 Ⅰ. 서론 2 조사보고서 2009-06 Ⅱ. 복합금융그룹화와리스크 1. 정의 요약 3 2. 유형 4 조사보고서 2009-06 3. 복합금융그룹화의동기 4. 복합금융그룹화와리스크 요약 5 6 조사보고서 2009-06 요약 7 Ⅲ. 국가별복합금융그룹화현황및감독체계 1. EU 지침 2. Joint Forum
조사보고서 2009-6 복합금융그룹의리스크와감독 Ⅰ. 서론 2 조사보고서 2009-06 Ⅱ. 복합금융그룹화와리스크 1. 정의 요약 3 2. 유형 4 조사보고서 2009-06 3. 복합금융그룹화의동기 4. 복합금융그룹화와리스크 요약 5 6 조사보고서 2009-06 요약 7 Ⅲ. 국가별복합금융그룹화현황및감독체계 1. EU 지침 2. Joint Forum
<C0CCBDB4C6E4C0CCC6DB203132C8A35F E687770>
 ISSN 2508-7622 ISSUE PAPER 2017-12 자율주행자동차활성화를위한법제개선방안및입법 ( 안 ) 제안 강선준김민지 ISSUE PAPER 2017-12 자율주행자동차활성화를위한법제개선방안및입법 ( 안 ) 제안 강선준김민지 Ⅰ. 서 4 Ⅱ. 국내 외자율주행자동차법 정책현황 7 Ⅲ. 자율주행자동차관련법적쟁점및정책적이슈 19 Ⅳ. 자율주행자동차특별법
ISSN 2508-7622 ISSUE PAPER 2017-12 자율주행자동차활성화를위한법제개선방안및입법 ( 안 ) 제안 강선준김민지 ISSUE PAPER 2017-12 자율주행자동차활성화를위한법제개선방안및입법 ( 안 ) 제안 강선준김민지 Ⅰ. 서 4 Ⅱ. 국내 외자율주행자동차법 정책현황 7 Ⅲ. 자율주행자동차관련법적쟁점및정책적이슈 19 Ⅳ. 자율주행자동차특별법
5월전체 :7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26
 5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
TS-4월호-28일-4A.pdf
 www.ts2020.kr TS everyday LIFE 1 2015/ 390 4 TS CONTENTS What's TS What's Up 22 26 30 34 38 40 04 06 10 44 46 What's Special 14 18 What's Next 50 54 56 58 60 62 64 66 67 68 TS CEO MESSAGE 4 _ TS for you
www.ts2020.kr TS everyday LIFE 1 2015/ 390 4 TS CONTENTS What's TS What's Up 22 26 30 34 38 40 04 06 10 44 46 What's Special 14 18 What's Next 50 54 56 58 60 62 64 66 67 68 TS CEO MESSAGE 4 _ TS for you
ITFGc03ÖÁ¾š
 Focus Group 2006 AUTUMN Volume. 02 Focus Group 2006 AUTUMN 노랗게 물든 숲 속에 두 갈래 길이 있었습니다. 나는 두 길 모두를 가볼 수 없어 아쉬운 마음으로 그 곳에 서서 한쪽 길이 덤불 속으로 감돌아간 끝까지 한참을 그렇게 바라보았습니다. 그리고 나는 다른 쪽 길을 택했습니다. 그 길에는 풀이 더 무성하고, 사람이
Focus Group 2006 AUTUMN Volume. 02 Focus Group 2006 AUTUMN 노랗게 물든 숲 속에 두 갈래 길이 있었습니다. 나는 두 길 모두를 가볼 수 없어 아쉬운 마음으로 그 곳에 서서 한쪽 길이 덤불 속으로 감돌아간 끝까지 한참을 그렇게 바라보았습니다. 그리고 나는 다른 쪽 길을 택했습니다. 그 길에는 풀이 더 무성하고, 사람이
슬라이드 1
 공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
6) 송승종길병옥, ' 군용무인기개발의역사와그전략적함의에대한연구,' 군사 제 97 호, ) 최근공개된자료에따르면주한미군은기간중 268 회의무인기비행을수행한것으로알려졌다.
 송승종길병옥, ' 군용무인기개발의역사와그전략적함의에대한연구,' 군사 제 97 호, ) 최근공개된자료에따르면주한미군은기간중 268 회의무인기비행을수행한것으로알려졌다.") 목차 I. 서언 II. 북한무인기능력과발전추세 III. 대남도발양상과예상피해수준전망 IV. 군사선진국들의무인기운용 V. 우리군의대응방향 VI. 결언 1) 공군사관학교졸업. 영국 Hull University 국제정치학박사. 국방대학교안보대학원군사전략학부장. 2) 자유북한방송, 2014. 5. 9. 3) Reudiger Frank, 'A Guide to Kim
목차 I. 서언 II. 북한무인기능력과발전추세 III. 대남도발양상과예상피해수준전망 IV. 군사선진국들의무인기운용 V. 우리군의대응방향 VI. 결언 1) 공군사관학교졸업. 영국 Hull University 국제정치학박사. 국방대학교안보대학원군사전략학부장. 2) 자유북한방송, 2014. 5. 9. 3) Reudiger Frank, 'A Guide to Kim
2003report250-9.hwp
 2003 연구보고서 250-9 여성의 IT 직종교육훈련후취업현황및취업연계방안 : () : () 한국여성개발원 발간사 2003 12 연구요약 1. 2. 전체정부위탁훈련기관의취업관련서비스제공정도에서, 취업정보, 취업상담, 취업알선을 적극적이며많이제공 한다가각각 76.6%, 70.3%, 65.6% 로알선기능이약간떨어지며, 취업처개척 개발 (50.0%) 이가장낮다.
2003 연구보고서 250-9 여성의 IT 직종교육훈련후취업현황및취업연계방안 : () : () 한국여성개발원 발간사 2003 12 연구요약 1. 2. 전체정부위탁훈련기관의취업관련서비스제공정도에서, 취업정보, 취업상담, 취업알선을 적극적이며많이제공 한다가각각 76.6%, 70.3%, 65.6% 로알선기능이약간떨어지며, 취업처개척 개발 (50.0%) 이가장낮다.
?.? -? - * : (),, ( 15 ) ( 25 ) : - : ( ) ( ) kW. 2,000kW. 2,000kW 84, , , , : 1,
,, ( 15 ) ( 25 ) : - : ( ) ( ) kW. 2,000kW. 2,000kW 84, , , , : 1,") 기계 기구및설비설치또는변경시사업장안전성문제가걱정된다면? 제조업등유해 위험방지계획서로해결하세요! '14 9 13 10 13. ?.? -? - www.kosha.or.kr * : (),, ( 15 ) - 15 - ( 25 ) - 2 - : - : ( 2013-2 ) ( ) 10. 500kW. 2,000kW. 2,000kW 84,000 123,000 183,000
기계 기구및설비설치또는변경시사업장안전성문제가걱정된다면? 제조업등유해 위험방지계획서로해결하세요! '14 9 13 10 13. ?.? -? - www.kosha.or.kr * : (),, ( 15 ) - 15 - ( 25 ) - 2 - : - : ( 2013-2 ) ( ) 10. 500kW. 2,000kW. 2,000kW 84,000 123,000 183,000
목 차 Ⅰ. 정보기술의 환경 변화 Ⅱ. 차량-IT Convergence Ⅲ. 차량 센서 연계 서비스 Ⅳ. 차량-IT 융합 발전방향
 차량-IT 융합 기반의 미래형 서비스 발전 동향 이범태 (현대자동차) 목 차 Ⅰ. 정보기술의 환경 변화 Ⅱ. 차량-IT Convergence Ⅲ. 차량 센서 연계 서비스 Ⅳ. 차량-IT 융합 발전방향 Ⅰ. 정보 기술의 환경변화 1. 정보기술의 발전 2. 자동차 전장 시스템의 발전 1. 정보기술의 발전 정보기술은 통신 네트워크의 급속한 발전, 단말의 고기능화,
차량-IT 융합 기반의 미래형 서비스 발전 동향 이범태 (현대자동차) 목 차 Ⅰ. 정보기술의 환경 변화 Ⅱ. 차량-IT Convergence Ⅲ. 차량 센서 연계 서비스 Ⅳ. 차량-IT 융합 발전방향 Ⅰ. 정보 기술의 환경변화 1. 정보기술의 발전 2. 자동차 전장 시스템의 발전 1. 정보기술의 발전 정보기술은 통신 네트워크의 급속한 발전, 단말의 고기능화,