이발명을지원한국가연구개발사업 과제고유번호 C 부처명 중소기업청 연구관리전문기관 ( 사 ) 한국산학연협회 연구사업명 산학연공동기술개발지역사업 연구과제명 스마트폰센서와영상인식기술을이용한안전운전서비스 SW 개발 기여율 1/1 주관기관 가천대학교산학협력단 연구기간
|
|
|
- 서구 방
- 6 years ago
- Views:
Transcription
1 (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) B60W 30/10 ( ) B60W 30/12 ( ) B60W 40/02 ( ) G06T 7/00 ( ) (21) 출원번호 (22) 출원일자 2013 년 06 월 21 일 심사청구일자 전체청구항수 : 총 7 항 2013 년 06 월 21 일 (54) 발명의명칭지능형차량의차선검출방법 (11) 공개번호 (43) 공개일자 2014년12월31일 (71) 출원인 가천대학교산학협력단 경기도성남시수정구성남대로 1342 ( 복정동 ) (72) 발명자 한기태 경기성남시분당구양현로 192, 1012 동 601 호 ( 이매동, 이매촌삼성아파트 ) 허환 경기성남시수정구수정로 87 번길 24-1, 101 호 ( 태평동 ) 김성훈 경기성남시수정구제일로 214-4, ( 태평동 ) (74) 대리인 김일환 (57) 요약 본발명은지능형차량의차선검출방법에관한것으로, (a) 입력받은영상의최초프레임에서 RANSAC 알고리즘을이용하여도로의소실점을검출하는단계 ; (b) 상기소실점주변의일정영역을템플릿매칭에사용할템플릿영역 (TA) 으로저장하는단계 ; (c) 상기소실점을기준으로하단으로내려가면서차선을예측하는단계 ; (d) 예측된상기차선을기반으로투시변환계수를추출하는단계 ; (e) 상기추출된투시변환계수를역투시변환하여역투시변환계수를추출하고, 상기역투시변환계수를이용하여원근감이제거된영상을획득하는단계 ; 및 (f) 상기원근감이제거된영상에서차선필터를적용하여차선을검출하는단계를포함한다. 이와같은본발명은영상의카메라파라미터가필요없는역투시변환기술및제안한차선필터를사용하여경사진도로환경에서도강인한실시간차선검출방법을제공한다. 대표도 - 도 1-1 -
2 이발명을지원한국가연구개발사업 과제고유번호 C 부처명 중소기업청 연구관리전문기관 ( 사 ) 한국산학연협회 연구사업명 산학연공동기술개발지역사업 연구과제명 스마트폰센서와영상인식기술을이용한안전운전서비스 SW 개발 기여율 1/1 주관기관 가천대학교산학협력단 연구기간 ~
3 특허청구의범위청구항 1 지능형차량의차선검출방법에있어서, (a) 입력받은영상의최초프레임에서 RANSAC 알고리즘을이용하여도로의소실점을검출하는단계 ; (b) 상기소실점주변의일정영역을템플릿매칭에사용할템플릿영역 (TA) 으로저장하는단계 ; (c) 상기소실점을기준으로하단으로내려가면서차선을예측하는단계 ; (d) 예측된상기차선을기반으로투시변환계수를추출하는단계 ; (e) 상기추출된투시변환계수를역투시변환하여역투시변환계수를추출하고, 상기역투시변환계수를이용하여원근감이제거된영상을획득하는단계 ; 및 (f) 상기원근감이제거된영상에서차선필터를적용하여차선을검출하는단계를포함하는것을특징으로하는지능형차량의실시간차선검출방법. 청구항 2 제1항에있어서, 상기 (a) 단계는, 입력받은영상을그레이 (Gray) 영상으로변환하는단계 ; 상기그레이영상을캐니에지변환으로에지를검출하는단계 ; 표준허프변환을이용하여상기영상내의선분들의집합 S를생성하는단계 ; 상지집합 S에서임의로두선분을선택하고, 상기두선분의교차점 (p) 를산출하는단계 ; 상기교차점 (P) 를통과하는선분들의집합 Sp를산출하는단계 ; 상기집합 Sp 중가장큰집합을가지는점을소실점으로선택하는단계를포함하는것을특징으로하는지능형차량의실시간차선검출방법. 청구항 3 제1항또는제2항에있어서, 상기 (c) 단계이후, 상기검출된소실점을기준으로관심영역 (ROI) 을지정하는단계를더포함하는것을특징으로하는지능형차량의실시간차선검출방법. 청구항 4 제3항에있어서, 상기입력받은영상이최초프레임이아니거나상기 (d) 단계이후에, 상기저장된템플릿영역에원본영상과비교하여유사영역 (Similar Area:SA) 을검출하는단계 ; 상기템플릿과유사영역의좌표를비교해상기템플릿영역이 Y축으로이동한경우, 변동된영역을새로운템플릿영역으로저장하는단계 ; - 3 -
4 상기새로운템플릿영역의중심점을소실점으로재설정하는단계 ; 상기재설정된소실점을기준으로관심영역 (ROI) 를재설정하는단계 ; 및상기재설정된소실점을적용하여투시변환계수를다시추출하는단계를더포함하는것을특징으로하는지능형차량의실시간차선검출방법. 청구항 5 제3항에있어서, 상기관심영역 (ROI) 은상기소실점을기준으로하부영역인것을특징으로하는지능형차량의실시간차선검출방법. 청구항 6 제4항에있어서, 상기 (C) 단계는, 상기역투시변환에사용되기위해호모그래피행렬을산출하는단계를포함하는것을특징으로하는지능형차량의실시간차선검출방법. 청구항 7 제4항에있어서, 상기템플릿매칭은, 정규화된상관관계 (NCC:Normalized Cross-Correlation) 매칭방법을사용하는것을특징으로하는지능형차량의실시간차선검출방법. 명세서 [0001] 기술분야본발명은지능형차량의차선검출방법에관한것으로, 보다상세하게는카메라파라미터를산출할필요없이카메라에입력되는영상만으로경사진도로환경등에서도역투시매핑 (IPM) 방법과같은성능을가지는차선검출방법에관한것이다. [0002] [0003] [0004] 배경기술최근 IT융합기술이발전함에따라자동차산업에서도여러 IT기술과융합된스마트카 (Smart Car) 의기술이떠오르고있다. 스마트카진화의핵심은기존최첨단텔레매틱스서비스를적극수용함에따라폭넓은서비스가가능하게된것이다. 이러한서비스를이용한고안전지능형차량 (Advanced Vehicle Safety: AVS) 은사고예방및회피, 충돌등위험상황으로부터운전자및탑승자를보호하여교통사고및피해를줄일수있는기술로평가된다. 고안전지능형차량의구성요소중하나인차선이탈경고시스템 (Lane Departure Warning System) 은영상, 레이더, 레이저등의입력센서로부터영상정보를입력받아주행중인차량의차선이탈여부를판별하여운전자의전방주시태만이나졸음운전등을경고하여안전운전기능을구현하는기술이다. 이러한기능을구현하기위해서는각종센서를유기적으로잘활용하는것이중요하지만수동센서인영상센서를사용하는것이일반적이다. 영상입력센서를사용하여차선이탈여부를판별하기위한실시간차선검출알고리즘은단순하고적은연산 - 4 -
5 으로처리시간을단축시켜실시간으로사용할수있어야한다. 차선검출알고리즘의경우색정보 [ 대한민국, 공개번호 ] 나차선에지정보를이용하여판단하는데색정보는에지정보 [ 대한민국, 공개번호 호 ] 보다정확하게검출이가능하지만특정한색을추출하기때문에특징추출선택의폭이제한적이다. 또한에지정보를사용하는허프변환의경우잡음이나도로의상태에강건하게직선추출이가능하지만연산량이많아실시간검출에적용하기힘든단점이있다. [0005] [0006] 차량검출방법에는여러가지방법이있는데, Y. Wang은 B-Snake 기반의차선검출방법을제안하였다. 이방법은 B-Spline에필요한제어점을찾기위하여 Snake 알고리즘을사용해제어점을설정하여어떠한형태의차선이라도검출가능한강건한차선검출방법을제안하였으나검출시간이길어실시간차선검출에는사용의제약을가지고있다. Alberto Broggi는카메라파라미터를이용하여영상의원근효과를제거해탑뷰 (top view) 영상을생성하여차선을검출하는방법을제안하였다. 영상의원근효과를제거하기위하여역투시매핑 (IPM: Inverse Perspective Mapping) 방법으로차선을평행하게만들어영상전체를사용하지않고차선이나타나는영역만을사용할수있어검출시간을단축시킬수있었다. 그러나이방법은역투영변환을하기위하여카메라의파라미터를사전에알아야하는단점이존재한다. 발명의내용 [0007] 해결하려는과제상술한문제를해결하고자하는본발명의과제는, 카메라파라미터를산출할필요없이빠른속도로차선을검출할수있고, 도로경사변화에강건하게실시간으로차선을검출할수있는지능형차량의차선검출방법을제공하고자함이다. [0008] 과제의해결수단제안하는방법은영상최초프레임에서소실점을검출하여소실점을기준으로하는최초차선을예측하고소실점주변영역을템플릿으로저장하고이를이용하여다음프레임에대한소실점영역을추적하도록한다. 예측된소실점영역으로부터차선을예측하고, 예측된차선으로부터생성한이상형차선을설정하며, 이를이용하여투시변환에사용할호모그래피행렬을추출한다. 추출된호모그래피행렬을사용하여원근효과가제거된영상을생성하며, 여기에 5x1 차선필터를사용하여차선을검출한다. [0009] [0010] 발명의효과이와같은본발명은영상의카메라파라미터가필요없는역투시변환기술및제안한차선필터를사용하여경사진도로환경에서도강인한실시간차선검출방법을제공한다. 또한, 본발명은경사진도로환경에서도차선검출이견고하며, 처리영역을축소하고처리과정을단순화함으로서초당 40 frames 정도의양호한차선검출결과보여준다. [0011] 도면의간단한설명 도 1 은본발명의실시예에따른지능형차량의실시간차선검출방법의흐름을나타낸블록구성도이고, 도 2는본발명의실시예에따른차선검출방법에적용되는소실점획득을위한처리과정을나타내는모식도이고, 도 3은본발명의실시예에따른차선검출방법에적용되는투시변환의예를나타낸모식도이고, 도 4는정상도로인상태와경사도로의상태에서동일한변환계수를적용했을때의문제점을나타낸사진이고, 도 5는입력된영상과입력된영상의소실점을기준으로템플릿영역을지정한모습을나타낸사진이고, 도 6은본발명의실시예에따른차선검출방법으로최초차선의예측의결과를나타낸사진이고, 도 7은본발명의실시예에적용되는관심영역 (ROI) 지정을나타낸사진이고, 도 8은본발명의실시예에따라예측된차선과이상형차선을나타낸사진이고, - 5 -
6 도 9는본발명의실시예에적용되는역투시변환의예를나타낸모식도이고, 도 10은본발명의실시예에따라예측되는차선과이상형차선의상관관계를나타낸모식도이고, 도 11은본발명의실시예에따라예측된 2개의타입의차선의예를나타낸모식도이고, 도 12는도로경사가변화하는경우재지정딘소실점영역을나타낸사진이고, 도 13은본발명의실시예에따라호모그래피행렬을이용하여역투시변환한결과를나타낸사진이고, 도 14는본발명의실시예에서사용되는차선필터의예를나타낸모식도이고, 도 15는본발명의실시예에따라예측되는차선히스토그램에서의그레이값을나타낸그래프이고, 도 16은본발명의실시예에적용되는차선필터에따라검출된차선을나타낸사진이고, 도 17은도로의상태가직선이고장애물이존재하지않는상황에서차선검출의예를나타낸사진이다. 도 18은도로의상태가곡선이고도로의환경이이상적인경우의실험결과를나타낸사진이고, 도 19는도로의상태가불규칙하거나그림자가껴있는경우와도로의환경변화나문양이생기는경우의실험결과를나타낸사진이고, 도 20은차선의상태가불규칙하거나차선위로다른차량이끼어들기를하는경우의실험결과를나타낸사진이다. [0012] [0013] [0014] [0015] [0016] 발명을실시하기위한구체적인내용이하에서본발명의바람직한실시예를도면을참조하여상세히설명하기로한다. 도 1은본발명의실시예에따른지능형차량의실시간차선검출방법의흐름을나타낸블록구성도이다. 도 1 에나타낸바와같이, 본발명의실시예에따른차선검출방법은, (a) 입력받은영상의최초프레임에서 RANSAC 알고리즘을이용하여도로의소실점을검출하는단계 (S110); (b) 상기소실점주변의일정영역을템플릿매칭에사용할템플릿영역 (TA) 으로저장하는단계 (S130); (c) 상기소실점을기준으로하단으로내려가면서차선을예측하는단계 (S150); (d) 예측된상기차선을기반으로투시변환계수를추출하는단계 (S170); (e) 상기추출된투시변환계수를역투시변환하여역투시변환계수를추출하고, 상기역투시변환계수를이용하여원근감이제거된영상을획득하는단계 (S310); 및 (f) 상기원근감이제거된영상에서차선필터를적용하여차선을검출하는단계 (S330) 를포함하여구성된다. 이와같은본발명의실시예는사전에카메라파라미터를산출할필요없이카메라에입력되는영상만으로경사진도로환경등에서도역투시매핑 (IPM) 방법과같은성능을가지는차선검출방법을제안한다. 보다구체적으로는, 본발명에따른차선검출방법은영상최초프레임에서소실점을검출하여소실점을기준으로하는최초차선을예측하고소실점주변영역을템플릿으로저장하고이를이용하여다음프레임에대한소실점영역을추적하도록한다. 그리고나서예측된소실점영역으로부터차선을예측하고, 예측된차선으로부터생성한이상형차선을설정하며, 이를이용하여투시변환에사용할호모그래피행렬을추출한다. 추출된호모그래피행렬을사용하여원근효과가제거된영상을생성하며, 여기에 5x1 차선필터를사용하여차선을검출한다. 즉, 본발명에서제안하는차선검출방법은알고리즘이단순하고관심영역을지정하여첫프레임에서허프변환을적용하고이후소실점영역을템플릿으로추적하기때문에전체영상을사용하는허프변환방법보다빠른속도로차선을검출할수있고또한 IPM 방법과달리카메라파라미터를필요로하지않는다는장점이있으며입력영상마다소실점추적을통하여도로경사변화에강건하게차선을검출할수있다. 이하에서도 1을참조하여전체프로세스를상세히설명하기로한다. [0017] [0018] RANSAC 알고리즘을이용한소실점을검출 Fichier 과 Bolles 가제안한 RANSAC 알고리즘은노이즈가심한원본데이터로부터모델파라미터를예측하는방법이다. 일반적으로파라미터를예측하는방법들은가능한많은데이터를사용하여유효하지않은데이터를제거하는반면에 RANSAC 알고리즘은가능한적은양의초기데이터를사용하여일관된데이터의집합 (Consensus - 6 -
7 Set) 을확장시켜가는방식을사용한다. [0019] [0020] RANSAC 알고리즘은추정 (Hypothesis) 단계와검사 (Verification) 단계로이루어진다. 추정단계에서원본데이터중에서임의로 N개의샘플데이터를선택하고선택된데이터를정상적인데이터로보고모델파라미터를예측한다. 검사단계에서는이렇게선택된데이터를가지고원본데이터가예측된모델에잘맞는지검사한다. 만일원본데이터가유효한데이터인경우유효한데이터집합에추가한다. 이러한추정과검사단계를 N회반복수행하여파라미터를구하게된다. 반복횟수 N은최소한하나의샘플집합이유효한데이터 (Inlier) 만을포함할확률 P를보장할수있도록충분히높게설정되어야하는데일반적으로 P는 0.99 로설정한다. 선택되는샘플데이터에서유효한데이터가선택될확률을 u, 유효하지않은데이터의확률을 v라할때 v = 1 - u로표현가능하다. 샘플데이터의수를 m 이라고할때, 다음과같은 [ 수학식 1] 과 [ 수학식 2] 로반복횟수 N을구할수있다. 수학식 1 [0021] 수학식 2 [0022] [0023] [0024] [0025] 입력된영상에대하여 RANSAC 알고리즘을이용해직선들의교차점을구하는방법으로소실점을획득한다. 도 2 는본발명의실시예에따른차선검출방법에적용되는소실점획득을위한처리과정을나타내는모식도이다. 도 2에나타낸바와같이, 소실점획득을위한처리과정은 1) 입력받은영상을 Gray 영상으로변환단계, 2) 캐니에지변환으로에지검출하는단계, 3) 표준허프변환을이용하여에지영상내선분들의집합 S를생성하는단계, 4) 무작위로두선분 S1, S2를선택하고샘플로부터교차점 p를계산하는단계, 5) 교차점 p를통과하는 S내의선분들의집합 Sp를계산하는단계, 및 6) 가장큰집합 Sp을가지는점 p를소실점으로선택하는단계를포함하여구성된다. 여기서, 반복횟수 N은다음과같이설정한다. 영상내에소실점이존재한다고가정한다면영상내에소실점을교차점으로하는직선은 2개이상존재한다. 영상내에직선의개수를 n 이라고한다면 [ 수학식 2] 를사용하여다음 [ 수학식 3] 으로반복횟수 N을설정할수있다. 수학식 3 [0026] [0027] 투시변환 (S170) - 7 -
8 [0028] [0029] 본발명에서는입력된영상의원근감을제거하는방법을사용하기위해투시변환을이용한다. 투시변환은하나의 2차원객체를서로다른두개의평면으로투영하여생긴두영상사이의관계를규정하는것이다. 이를이용하면도 3에나타낸바와같이직사각형형태의영상을사다리꼴형태의영상으로바꿀수있다. 도 3은본발명의실시예에따른차선검출방법에적용되는투시변환의예를나타낸모식도이다. 평면호모그래피는하나의평면을다른평면으로옮기는투영변환을의미한다. 호모그래피행렬은 [ 수학식 4] 와같이크기가 3x3인행렬 H로표현한다. 수학식 4 [0030] [0031] 실세계이상형영상을 Q, 투시변환된영상을 Q' 스케일인자를 s, 호모그래피행렬을 H 라고할때다음 Q' 는 [ 수 학식 5] 로표현된다. 수학식 5 [0032] [0033] 호모그래피행렬 H 는오직 8 개의자유도가존재하기때문에이 1 인 3x3 행렬이다. 호모그래피행렬 H 는카메라 내부행렬 M 과회전행렬 R, 이동벡터 t 로표현하여 [ 수학식 6] 처럼표현이가능하다. 수학식 6 [0034] [0035] 여기서 M 은다음의 [ 수학식 7] 과같다. 수학식 7 [0036] [0037] W 는회전행렬 R 과이동벡터 t 로표현되며 W 와 R 은다음 [ 수학식 8] 과같다
![수학식 8 [0038] [0039] 호모그래피행렬 H 의회전행렬에서 R=[r1, r2, r3] 은각각 X, Y, Z 축의회전에관여한다. 여기서객체평면에 대하여 Z=0 인경우 r3 을없애고다음 [ 수학식 9] 와같이쓸수있다. 수학식 9 [0040] [0041] 식을정리하면 H 는다음 [ 수학식 10] 과같다.](/docs-images/91/105575219/images/9-0.jpg "수학식 10 [0042] [0043] 호모그래피행렬 H 는원본영상평면위의점 P src 와목적지영상평면위의점 P dst 사이의관계를규정하며, 이는다음 [ 수학식 11] 로표현된다. 수학식 11 [0044] [0045] [0046] [0047] 템플릿매칭템플릿매칭은추적하고자하는이미지를템플릿으로만들어입력영상과비교하여매칭을하는방식이다.")
9 수학식 8 [0038] [0039] 호모그래피행렬 H 의회전행렬에서 R=[r1, r2, r3] 은각각 X, Y, Z 축의회전에관여한다. 여기서객체평면에 대하여 Z=0 인경우 r3 을없애고다음 [ 수학식 9] 와같이쓸수있다. 수학식 9 [0040] [0041] 식을정리하면 H 는다음 [ 수학식 10] 과같다. 수학식 10 [0042] [0043] 호모그래피행렬 H 는원본영상평면위의점 P src 와목적지영상평면위의점 P dst 사이의관계를규정하며, 이는다음 [ 수학식 11] 로표현된다. 수학식 11 [0044] [0045] [0046] [0047] 템플릿매칭템플릿매칭은추적하고자하는이미지를템플릿으로만들어입력영상과비교하여매칭을하는방식이다. 여기에는크게 3가지방법이존재하는데제곱차 (Squared Difference), 상관관계 (Correlation), 상관계수 (Correlation coefficient) 매칭방법이다. 본발명에서는정규화된상관관계방법을이용하였다. 상관관계는신호처리분야에서각신호의관계를정량화하는데사용된다. 상관관계방법은템플릿으로저장된영상과원본입력영상의곱을모두제곱하여더한다. 이경우값이완벽하게일치하면높은값이나오고, 그렇지않을경우작은값이나오거나 0이나오게된다. 입력영상은 I 라고하고템플릿영상을 T, 결과영상을 R 로표현할때상관관계에대한식은다음 [ 수학식 12] 와같고식을적용하여상관관계맵을생성하게되면가장큰값을가지는위치가탐색된템플릿영역의위치가된다
10 수학식 12 [0048] [0049] 템플릿매칭방법의정확도향상과조명의간섭을줄여주기위하여정규화를시킬수있다. 정규화된방법은입 력영상과템플릿영상사이에조명의차이가존재할때, 그영향을크게줄여준다. 정규화계수는다음 [ 수학 식 13] 과같다. 수학식 13 [0050] [0051] [ 수학식 11] 을정규화시킨식은 [ 수학식 14] 로나타낼수있다. [0052] 상술한알고리즘을바탕으로본발명의실시예에따른지능형차량의차선검출방법의프로세스를도 1 을참조 하여상세히살펴보면, 크게 3 단계로구분지을수있다. [0053] [0054] [0055] [0056] [0057] [0058] [0059] 1단계는영상의시작프레임일경우에적용하며알고리즘은다음과같다. [1단계알고리즘 ](S100) 1) 영상내에존재하는소실점을 RANSAC 알고리즘을이용하여검출 (S110) 2) 검출된소실점기준으로일정영역을템플릿영역으로저장 (S130) 3) 소실점의하단에서가장가까이에위치한일정한폭을가진직선을차선으로간주 4) 검출된소실점을기준으로관심영역을지정 (S155) 5) 예측된차선을기준으로투시변환계수를추출 (S170) [0060] [0061] [0062] [0063] [0064] [0065] [0066] 2단계는영상의시작프레임이아닐경우혹은 1단계를거친경우에적용하며알고리즘은다음과같다. [2단계알고리즘 ](S200) 1) 저장된템플릿영역을원본영상과비교하여유사영역 (SA) 검출 2) 템플릿영역 (TA) 이 Y축으로이동한경우템플릿영역을변화된 Y축만큼이동 (S230) 3) 템플릿영역의중심점을소실점으로재설정 (s240) 4) 관심영역 (ROI) 재설정 (S250) 5) 변화된소실점을적용하여투시변환계수를다시추출 (S260) [0067]
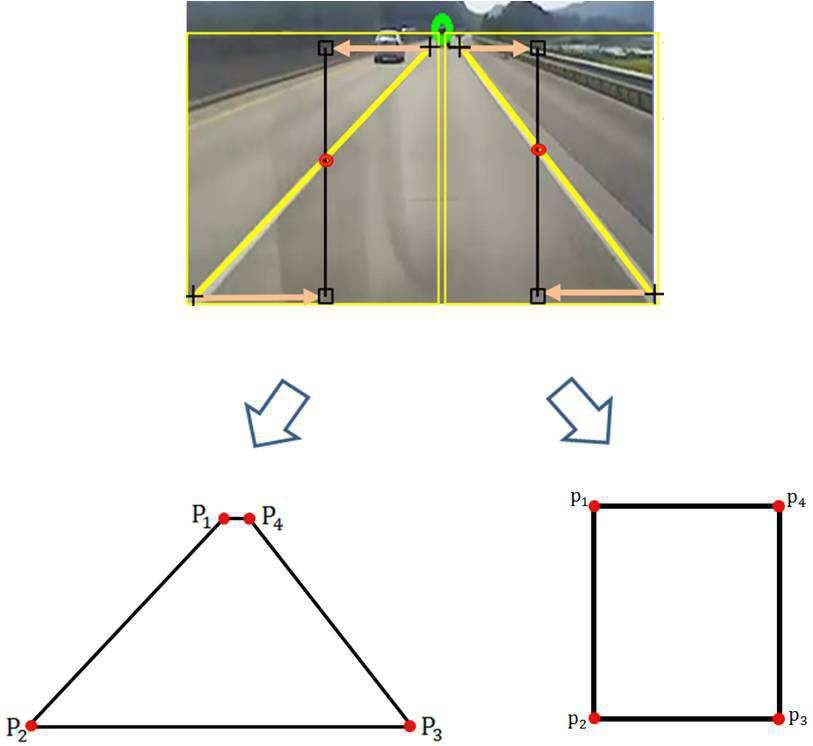
11 [0068] [0069] [0070] [0071] [0072] 3단계알고리즘은다음과같다. [3단계알고리즘 ] 1) 추출된계수를사용하여영상을역투시변환하고원근감이제거된영상을생성 (S310) 2) 역투시변환된영상으로부터차선을검출 (S330) 첫프레임이후소실점이검출된상황에서는 2단계와 3단계의반복만으로차선을검출한다. [0073] [0074] [0075] 소실점위치기반템플릿지정입력된영상에대하여 RANSAC 알고리즘을사용해소실점을획득하였다. 본발명의실시예에서는소실점을기준으로관심영역 (ROI) 을지정하여역투시변환을사용하는데, 이때경사진도로영상이입력되면소실점의위치가변하게되어이를반영해주지않는다면차선예측에문제가발생하게된다. 도 4는정상도로인상태와경사도로의상태에서동일한변환계수를적용했을때의문제점을보여준다. 이러한문제점을해결하기위하여본발명의실시예에서는소실점의주변일정영역을템플릿영역 (TA) 로저장하고 TA를다음프레임의소실점영역예측에사용한다. 본발명의실시예에서사용한템플릿영역의크기는가로세로가각각 100픽셀인사각형을사용하였다. 도 5는입력된영상과입력된영상의소실점을기준으로템플릿영역을지정한모습을보여주고있다. [0076] [0077] 최초차선예측 (S150) 본발명실시예에서는역투시변환에사용하는호모그래피행렬을구하기위하여차선을예측하는단계를거친다. 차선예측단계에서는연산속도가느리더라도정확한예측을위하여허프변환과차선의특징을이용한다. 차선의특징은일반적인도로의영상에서소실점아래에위치하고일정한두께를가지고있다. 또한차선에서검출된직선은소실점을지나가게된다. 이러한특징을이용하여소실점을수직으로지나는직선을긋고소실점하단부를스캔하여차선의특징을만족하는직선을찾는다. [0078] [0079] 관심영역지정 (S155) 실시간으로처리되어야하는차선검출방법에서는검출시간을단축하는것이중요한의미를가진다. 소실점의윗부분은도로와상관없는하늘이나기타배경을나타내기때문에소실점아래부분만을관심영역으로지정한다. 이러한관심영역을지정하는이유는연산량을줄이고필요없는영상영역을제거하여도로영역만을역투시변환의대상으로하기위함이다. 본발명의실시예에서사용하는관심영역은도 7에서나타내고있다. [0080] [0081] 관심영역영상의역투시변환방법 (S310) 본발명의실시예에서는 IPM방법과달리카메라파라미터가필요없는상황에서예측된차선을기준으로역투시변환을수행하는기법을제안하였으며, 이를위하여이전단계에서예측된차선을기반으로좌, 우차선이평행한가상의이상형차선을생성하기위해예측된차선의중심점을기준으로이상형차선을설정하였다. 도 8은예측된차선과이상형차선을그림으로나타낸것이다. [0082] 일반적인개념의투시변환을역으로적용하여탑뷰 (top view) 형태의영상을만들수있다. 도 9 와같이투시 변환이적용된입력영상에서역투시변환을적용하여원근효과가제거된영상을만들어낼수있다. [0083] 예측된차선과이상형차선의시작과끝점을이용하여역투시변환에사용할호모그래피행렬을구할수있다. 호모그래피행렬 H는앞서설명한것과같이카메라내부파라미터 M 과회전행렬 R, 이동벡터 t로구할수있지만다음도 9와같이예측된차선과이상형차선의좌표로만든사각형의꼭지점좌표를알고있다면역으로계산하여호모그래피행렬 H를계산할수있다. 도 10에서 P 1 은예측된차선의좌표이고은이상형차선의좌표
12 이다. [0084] 이경우역투시변환을위한식은다음 [ 수학식 15] 와같다. w 는스케일인자를의미한다. 수학식 15 [0085] [0086] 각점들의대응관계를다음 [ 수학식 16], [ 수학식 17] 과같이표현한다. 수학식 16 [0087] 수학식 17 [0088] [0089] 이를정리하면다음과같은식으로만들수있다. 수학식 18 [0090] 수학식 19 [0091] [0092] 호모그래피행렬 H 의원소 8 개를알기위해서는위의식과관련하여영상위의한점 P 와대응되는점 p 를 4 개 만알고있으면구할수있다. 따라서앞서구했던이상형차선의점과예측된차선의점을이용하여호모그래 피행렬 H 를추출한다. 다음 [ 수학식 20] 을이용하여호모그래피행렬 H 의계수를추출할수있다
13 수학식 20 [0093] [0094] 본발명의실시에서도 10 의두사각형으로구한호모그래피행렬은예측된차선의집합 P 로이루어진사각형 의좌표와이상형차선로이루어진사각형의좌표를도 11 로나타날때 H 는 [ 표 1] 과같다. [0095] 표 1 Table 1. An Example of Homography Matrix H i a i b i 2.45E c i 8.76E [0096] [0097] [0098] [0099] 템플릿영역검색본발명의실시예에서는앞서소실점을검출하고소실점주변영역을템플릿매칭에사용할영역 (TA:Template Area) 으로저장하였다. 템플릿매칭을위한방법으로는연산속도가빠르고정확하게템플릿을매칭할수있으며입력영상과템플릿영상간에조명의간섭을크게줄여주는효과가있는정규화된상관관계 (NCC:Normalized Cross-Correlation) 매칭방법을이용하였다. 검출된소실점의위치와비교하여템플릿영역의위치가 Y축으로변화된경우변화한위치를템플릿영역으로저장하고템플릿영역의중심점을소실점으로설정하여사용한다. 새로운소실점이설정되면설정된소실점을기준으로관심영역을다시지정한다. 이와같이소실점을추적하고관심영역을재설정함으로써도로주행중갑작스런경사변화에도강인하게역투시변환을사용할수있게된다. 도 12는도로경사가변화하는경우재지정된소실점영역을나타낸다. 도 12의 E에서붉은색점은초기소실점위치이고푸른색점은추적된새로운소실점의위치와각소실점을기준으로하는템플릿영역을나타내고있다. [0100] [0101] [0102] 차선검출 (S330) 앞서구한호모그래피행렬을사용하여영상의원근감을제거한영상을생성한다. 추출한호모그래피행렬을이용하여역투시변환한결과는도 13과같다. 이러한탑뷰영상은위그림과같이차선이대체적으로직선으로표현된다. 따라서본발명에서는원근감이제거된영상에서차선검출을위해 5x1 필터를사용한다. 5x1 필터는수직의에지를중점적으로검출해낼수있으며영상을그레이영상으로변환후필터를적용한다. 일반적인경우차선의색은도로에비하여밝은색으로분포되는데이를참조하여차선을검출한다. 도 14에서필터는왼쪽 2픽셀, 오른쪽 2픽셀의각각의합을구하여두값의차이가 ( 최대밝기값 - 영상화소
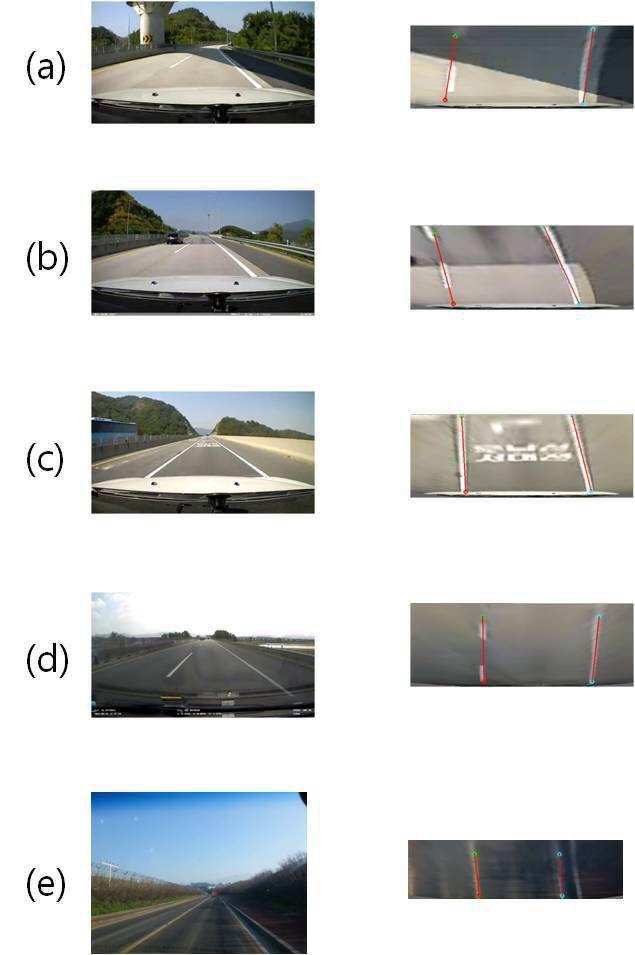
14 평균값 ) 이상일경우현재화소를에지성분으로결정한다. I 는이미지, c 는현재픽셀, L 은현재픽셀의왼쪽 부분, R 은현재픽셀의오른쪽부분이라할때, [ 수학식 21] 과같이나타낼수있다. 수학식 21 [0103] [0104] [0105] [0106] 이는도 15에서나타나듯이밝기값이차선부분에서큰변화량을가지게되므로이를이용하여필터를설정하였다. 도 16은필터를이용하여검출된에지영상을나타낸다. 도 16의 (a) 는입력영상이고, 도 16의 (b) 는차선필터를이용해검출된영상의결과이다. 역투시변환의특징상변환된영상의상단부분의영상정보는영상정보가부족하기때문에영상이퍼져보일수있다. 따라서영상의하단부분에위치하는정보를이용하는것이차선추출에있어서더욱정확한결과를나타낼수있으므로검출된차선영상에대하여하단부분부터탐색하여차선을검출한다. [0107] [0108] [0109] [0110] [0111] 실험결과본발명의실시예에서제안한차선검출방법차량앞창문에카메라를설치하여입력된영상을이용하여비교적단순한고속도로의영상을가지고실험을하였다. 도 17은도로의상태가직선이고장애물이존재하지않는이상적인상황에서의실험결과를나타낸다. 왼쪽은입력영상이고, 오른쪽은차선검출결과를나타낸사진이다. 도 18은도로의상태가곡선이고도로의환경이이상적인경우의실험결과를보여준다. 도 19는도로의상태가불규칙하거나그림자가껴있는경우와도로의환경변화나문양이생기는경우의실험결과를보여준다. 도 20은차선의상태가불규칙하거나차선위로다른차량이끼어들기를하는경우의실험결과를보여준다. [0112] [0113] 이처럼, 차량은일반적으로평평한도로에서운전하게되지만순간적으로나타나는도로의장애물이나도로자체상태에따라오르막이나내리막이나타날수있다. 이경우 IPM 방법은도로와카메라가이루는각도가순간적으로변하기때문에탑뷰영상이나타나는영상이평행하지않고퍼지거나모아지는형태로나타날수있다. 이러한문제점은순간적으로짧게나타나고영향이크게나타나지않을수있지만차선이탈경고시스템에서는문제를일으킬수있다. 본발명에서는소실점을추적하는방법으로이와같은문제점을해결할수있었다. 본발명의실시예에서제안하는방법은편의를위해 OpenCV로개발되었으며 Intel Core2 Duo 2.6GHz, 2GB RAM 컴퓨터에서 640*480 크기의영상을 1초에 40frame 가량처리할수있었다. [ 표 2] 는 B-Snake를이용한방법과 IPM방법을이용한방법을본발명의실시예에서제안한방법과의비교를처리속도와카메라파라미터사용유무로나타내었다
![표 2 [0114] [0115] 이와같이, 본발명은소실점을이용하여차선을예측후소실점영역을템플릿으로저장한후, 소실점기준하단영역을관심영역으로설정하고, 이영역에대하여투시변환이로원근효과를제거한영상으로부터차선을검출하는방법을제안한다.](/docs-images/91/105575219/images/15-0.jpg "차선검출과정에관심영역을지정하고처리방법을단순화하여검출시간을현저하게단축할수있고카메라파라미터를알필요도없다.")
15 표 2 [0114] [0115] 이와같이, 본발명은소실점을이용하여차선을예측후소실점영역을템플릿으로저장한후, 소실점기준하단영역을관심영역으로설정하고, 이영역에대하여투시변환이로원근효과를제거한영상으로부터차선을검출하는방법을제안한다. 차선검출과정에관심영역을지정하고처리방법을단순화하여검출시간을현저하게단축할수있고카메라파라미터를알필요도없다. 또한도로의노면상태가고르지않거나갑작스런오르막이나내리막에도영향을받지않는강인한차선검출방법을제안하고, 기존방법과의처리속도를비교한결과타당성을검증되었음을알수있다. 도면 도면
16 도면 2 도면




17 도면 4 도면 5 도면 6 도면

18 도면 8 도면 9 도면


19 도면 11 도면 12 도면




20 도면 14 도면 15 도면 16 도면

21 도면 18 도면

22 도면
특허청구의범위청구항 1 복수의영상검출부로부터출력되는영상의히스토그램 (histogram) 을계산하는단계 ; 상기복수의영상검출부로부터출력되는영상을히스토그램평활화 (histogram equalization) 하는단계 ; 상기복수의영상검출부중하나의영상검출부를선택하는단계 ; 및
 을계산하는단계 ; 상기복수의영상검출부로부터출력되는영상을히스토그램평활화 (histogram equalization) 하는단계 ; 상기복수의영상검출부중하나의영상검출부를선택하는단계 ; 및") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년12월18일 (11) 등록번호 10-1473415 (24) 등록일자 2014년12월10일 (51) 국제특허분류 (Int. Cl.) G06T 5/40 (2006.01) H04N 5/217 (2011.01) (21) 출원번호 10-2012-0156871 (22) 출원일자 2012
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년12월18일 (11) 등록번호 10-1473415 (24) 등록일자 2014년12월10일 (51) 국제특허분류 (Int. Cl.) G06T 5/40 (2006.01) H04N 5/217 (2011.01) (21) 출원번호 10-2012-0156871 (22) 출원일자 2012
PowerPoint 프레젠테이션
 03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
완벽한개념정립 _ 행렬의참, 거짓 수학전문가 NAMU 선생 1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에
,, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에") 1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에대하여 AB=BA 1 가성립한다 2 3 (4) 이면 1 곱셈공식및변형공식성립 ± ± ( 복호동순 ), 2 지수법칙성립 (은자연수 ) < 거짓인명제 >
1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에대하여 AB=BA 1 가성립한다 2 3 (4) 이면 1 곱셈공식및변형공식성립 ± ± ( 복호동순 ), 2 지수법칙성립 (은자연수 ) < 거짓인명제 >
PowerPoint 프레젠테이션
 System Software Experiment 1 Lecture 5 - Array Spring 2019 Hwansoo Han (hhan@skku.edu) Advanced Research on Compilers and Systems, ARCS LAB Sungkyunkwan University http://arcs.skku.edu/ 1 배열 (Array) 동일한타입의데이터가여러개저장되어있는저장장소
System Software Experiment 1 Lecture 5 - Array Spring 2019 Hwansoo Han (hhan@skku.edu) Advanced Research on Compilers and Systems, ARCS LAB Sungkyunkwan University http://arcs.skku.edu/ 1 배열 (Array) 동일한타입의데이터가여러개저장되어있는저장장소
Microsoft PowerPoint - ch02-1.ppt
 2. Coodinte Sstems nd Tnsfomtion 20 20 2.2 Ctesin Coodintes (,, ) () (b) Figue 1.1 () Unit vectos,, nd, (b) components of long,, nd. 직각좌표계에서각변수 (,, ) 들의범위 < < < < < < (2.1) 직각좌표계에서임의의벡터 는,, 가그림 1.1 에서와같이,,
2. Coodinte Sstems nd Tnsfomtion 20 20 2.2 Ctesin Coodintes (,, ) () (b) Figue 1.1 () Unit vectos,, nd, (b) components of long,, nd. 직각좌표계에서각변수 (,, ) 들의범위 < < < < < < (2.1) 직각좌표계에서임의의벡터 는,, 가그림 1.1 에서와같이,,
<B1B9BEEE412E687770>
 201 학년도대학수학능력시험 6 월모의평가문제및정답 2016 학년도대학수학능력시험 6 월모의평가문제지 1 제 2 교시 5 지선다형 1. 두행렬 성분은? [2 점 ] 에대하여행렬 의 3. lim 의값은? [2점] 1 2 3 4 5 1 2 3 4 5 2. 의값은? [2점] 1 2 3 4 5 4. 공차가 인등차수열 에대하여 의값은? [3 점 ] 1 2 3 4 5
201 학년도대학수학능력시험 6 월모의평가문제및정답 2016 학년도대학수학능력시험 6 월모의평가문제지 1 제 2 교시 5 지선다형 1. 두행렬 성분은? [2 점 ] 에대하여행렬 의 3. lim 의값은? [2점] 1 2 3 4 5 1 2 3 4 5 2. 의값은? [2점] 1 2 3 4 5 4. 공차가 인등차수열 에대하여 의값은? [3 점 ] 1 2 3 4 5
특허청구의 범위 청구항 1 복수개의 프리캐스트 콘크리트 부재(1)를 서로 결합하여 연속화시키는 구조로서, 삽입공이 형성되어 있고 상기 삽입공 내면에는 나사부가 형성되어 있는 너트형 고정부재(10)가, 상기 프리캐스 트 콘크리트 부재(1) 내에 내장되도록 배치되는 내부
를 서로 결합하여 연속화시키는 구조로서, 삽입공이 형성되어 있고 상기 삽입공 내면에는 나사부가 형성되어 있는 너트형 고정부재(10)가, 상기 프리캐스 트 콘크리트 부재(1) 내에 내장되도록 배치되는 내부") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) E01D 19/12 (2006.01) E01D 2/00 (2006.01) E01D 21/00 (2006.01) (21) 출원번호 10-2011-0036938 (22) 출원일자 2011년04월20일 심사청구일자 2011년04월20일 (65) 공개번호 10-2012-0119156
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) E01D 19/12 (2006.01) E01D 2/00 (2006.01) E01D 21/00 (2006.01) (21) 출원번호 10-2011-0036938 (22) 출원일자 2011년04월20일 심사청구일자 2011년04월20일 (65) 공개번호 10-2012-0119156
본 발명은 중공코어 프리캐스트 슬래브 및 그 시공방법에 관한 것으로, 자세하게는 중공코어로 형성된 프리캐스트 슬래브 에 온돌을 일체로 구성한 슬래브 구조 및 그 시공방법에 관한 것이다. 이를 위한 온돌 일체형 중공코어 프리캐스트 슬래브는, 공장에서 제작되는 중공코어 프
 (51) Int. Cl. E04B 5/32 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2007년03월12일 10-0693122 2007년03월05일 (21) 출원번호 10-2006-0048965 (65) 공개번호 (22) 출원일자 2006년05월30일 (43) 공개일자 심사청구일자
(51) Int. Cl. E04B 5/32 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2007년03월12일 10-0693122 2007년03월05일 (21) 출원번호 10-2006-0048965 (65) 공개번호 (22) 출원일자 2006년05월30일 (43) 공개일자 심사청구일자
이 발명을 지원한 국가연구개발사업 과제고유번호 A1100-0801-2739 부처명 지식경제부 연구관리전문기관 연구사업명 IT핵심기술개발 연구과제명 융합형 포털서비스를 위한 이용자 참여형 방송기술개발 기여율 주관기관 전자부품연구원 연구기간 2008년 03월 01일 ~ 2
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G06Q 30/00 (2006.01) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0133476 (22) 출원일자 2008년12월24일 심사청구일자 2008년12월24일 (65) 공개번호 10-2010-0074918 (43) 공개일자 2010년07월02일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G06Q 30/00 (2006.01) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0133476 (22) 출원일자 2008년12월24일 심사청구일자 2008년12월24일 (65) 공개번호 10-2010-0074918 (43) 공개일자 2010년07월02일
벡터(0.6)-----.hwp
-----.hwp") 만점을위한 수학전문가남언우 - 벡터 1강 _ 분점의위치벡터 2강 _ 벡터의일차결합 3강 _ 벡터의연산 4강 _ 내적의도형적의미 5강 _ 좌표를잡아라 6강 _ 내적의활용 7강 _ 공간도형의방정식 8강 _ 구의방정식 9강 _2014년수능최고난도문제 좌표공간에 orbi.kr 1 강 _ 분점의위치벡터 01. 1) 두점 A B 이있다. 평면 에있는점 P 에대하여 PA
만점을위한 수학전문가남언우 - 벡터 1강 _ 분점의위치벡터 2강 _ 벡터의일차결합 3강 _ 벡터의연산 4강 _ 내적의도형적의미 5강 _ 좌표를잡아라 6강 _ 내적의활용 7강 _ 공간도형의방정식 8강 _ 구의방정식 9강 _2014년수능최고난도문제 좌표공간에 orbi.kr 1 강 _ 분점의위치벡터 01. 1) 두점 A B 이있다. 평면 에있는점 P 에대하여 PA
(72) 발명자 김도규 서울특별시성북구장위 3 동 박준일 서울특별시강서구등촌동 서광아파트 103 동 803 호 유형규 경기도광명시광명 4 동한진아파트 101 동 1801 호 - 2 -
 발명자 김도규 서울특별시성북구장위 3 동 박준일 서울특별시강서구등촌동 서광아파트 103 동 803 호 유형규 경기도광명시광명 4 동한진아파트 101 동 1801 호 - 2 -") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) F25B 30/06 (2006.01) (21) 출원번호 10-2008-0088941 (22) 출원일자 2008 년 09 월 09 일 심사청구일자 전체청구항수 : 총 7 항 2008 년 09 월 09 일 (54) 지중열교환기의공급파이프 (11) 공개번호 10-2010-0030143
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) F25B 30/06 (2006.01) (21) 출원번호 10-2008-0088941 (22) 출원일자 2008 년 09 월 09 일 심사청구일자 전체청구항수 : 총 7 항 2008 년 09 월 09 일 (54) 지중열교환기의공급파이프 (11) 공개번호 10-2010-0030143
이 발명을 지원한 국가연구개발사업 과제고유번호 20110026962 부처명 교육과학기술부 연구사업명 기초사업연구-일반연구자지원사업-기본연구지원사업(유형II) 연구과제명 시공간 부호 협력 통신을 위한 동기 알고리즘 연구 기 여 율 1/1 주관기관 서울시립대학교 산학협력단
 연구과제명 시공간 부호 협력 통신을 위한 동기 알고리즘 연구 기 여 율 1/1 주관기관 서울시립대학교 산학협력단") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H04J 11/00 (2006.01) (21) 출원번호 10-2012-0038191 (22) 출원일자 2012년04월13일 심사청구일자 2012년04월13일 (65) 공개번호 10-2013-0115668 (43) 공개일자 2013년10월22일 (56) 선행기술조사문헌
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H04J 11/00 (2006.01) (21) 출원번호 10-2012-0038191 (22) 출원일자 2012년04월13일 심사청구일자 2012년04월13일 (65) 공개번호 10-2013-0115668 (43) 공개일자 2013년10월22일 (56) 선행기술조사문헌
 (Hyunoo Shim) 1 / 24 (Discrete-time Markov Chain) * 그림 이산시간이다연쇄 (chain) 이다왜 Markov? (See below) ➀ 이산시간연쇄 (Discrete-time chain): : Y Y 의상태공간 = {0, 1, 2,..., n} Y n Y 의 n 시점상태 {Y n = j} Y 가 n 시점에상태 j 에있는사건
(Hyunoo Shim) 1 / 24 (Discrete-time Markov Chain) * 그림 이산시간이다연쇄 (chain) 이다왜 Markov? (See below) ➀ 이산시간연쇄 (Discrete-time chain): : Y Y 의상태공간 = {0, 1, 2,..., n} Y n Y 의 n 시점상태 {Y n = j} Y 가 n 시점에상태 j 에있는사건
이발명을지원한국가연구개발사업 과제고유번호 PA 부처명 서울특별시 연구사업명 2010년도서울시산학연협력사업특허기술상품화기술개발지원사업 연구과제명 3D 입체전방위 (Omni-directional) 카메라시스템개발 주관기관 서울시립대학교 연구기간
 카메라시스템개발 주관기관 서울시립대학교 연구기간") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 17/00 (2006.01) G01C 11/00 (2006.01) (21) 출원번호 10-2011-0052212 (22) 출원일자 2011 년 05 월 31 일 심사청구일자 2011 년 05 월 31 일 (65) 공개번호 10-2011-0132278
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 17/00 (2006.01) G01C 11/00 (2006.01) (21) 출원번호 10-2011-0052212 (22) 출원일자 2011 년 05 월 31 일 심사청구일자 2011 년 05 월 31 일 (65) 공개번호 10-2011-0132278
이 발명을 지원한 국가연구개발사업 과제고유번호 08921-01304 부처명 방송통신위원회 연구사업명 방송통신기술개발사업 연구과제명 안전한 전자파환경 조성 주관기관 한국전자통신연구원 연구기간 2008.01.01 ~ 2012.12.31-2 -
 (19) 대한민국특허청(KR) (12) 공개특허공보(A) (51) 국제특허분류(Int. Cl.) H05K 9/00 (2006.01) H04B 1/38 (2006.01) (21) 출원번호 10-2011-0134285 (22) 출원일자 2011년12월14일 심사청구일자 없음 기술이전 희망 : 기술양도, 실시권허여, 기술지도 전체 청구항 수 : 총 1 항 (54)
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (51) 국제특허분류(Int. Cl.) H05K 9/00 (2006.01) H04B 1/38 (2006.01) (21) 출원번호 10-2011-0134285 (22) 출원일자 2011년12월14일 심사청구일자 없음 기술이전 희망 : 기술양도, 실시권허여, 기술지도 전체 청구항 수 : 총 1 항 (54)
집합 집합 오른쪽 l 3. (1) 집합 X 의각원소에대응하는집합 Y 의원소가단하나만인대응을 라할때, 이대응 를 X 에서 Y 로의라고하고이것을기호로 X Y 와같이나타낸다. (2) 정의역과공역정의역 : X Y 에서집합 X, 공역 : X Y 에서집합 Y (3) 의개수 X Y
 집합 X 의각원소에대응하는집합 Y 의원소가단하나만인대응을 라할때, 이대응 를 X 에서 Y 로의라고하고이것을기호로 X Y 와같이나타낸다. (2) 정의역과공역정의역 : X Y 에서집합 X, 공역 : X Y 에서집합 Y (3) 의개수 X Y") 어떤 다음 X 대응 1. 대응 (1) 어떤주어진관계에의하여집합 X 의원소에집합 Y 의원소를짝지어주는것을집합 X 에서집합 Y 로의대응이라고한다. l (2) 집합 X 의원소 에집합 Y 의원소 가짝지어지면 에 가대응한다고하며이것을기호로 와같이나타낸다. 2. 일대일대응 (1) 집합 A 의모든원소와집합 B 의모든원소가하나도빠짐없이꼭한개씩서로대응되는것을집합 A 에서집합
어떤 다음 X 대응 1. 대응 (1) 어떤주어진관계에의하여집합 X 의원소에집합 Y 의원소를짝지어주는것을집합 X 에서집합 Y 로의대응이라고한다. l (2) 집합 X 의원소 에집합 Y 의원소 가짝지어지면 에 가대응한다고하며이것을기호로 와같이나타낸다. 2. 일대일대응 (1) 집합 A 의모든원소와집합 B 의모든원소가하나도빠짐없이꼭한개씩서로대응되는것을집합 A 에서집합
Chap 6: Graphs
 그래프표현법 인접행렬 (Adjacency Matrix) 인접리스트 (Adjacency List) 인접다중리스트 (Adjacency Multilist) 6 장. 그래프 (Page ) 인접행렬 (Adjacency Matrix) n 개의 vertex 를갖는그래프 G 의인접행렬의구성 A[n][n] (u, v) E(G) 이면, A[u][v] = Otherwise, A[u][v]
그래프표현법 인접행렬 (Adjacency Matrix) 인접리스트 (Adjacency List) 인접다중리스트 (Adjacency Multilist) 6 장. 그래프 (Page ) 인접행렬 (Adjacency Matrix) n 개의 vertex 를갖는그래프 G 의인접행렬의구성 A[n][n] (u, v) E(G) 이면, A[u][v] = Otherwise, A[u][v]
SuperJump
 1. 메인메뉴 : 이버튼을누르면입출력신호에의하여자동검사를실시한다. 이버튼을누르면화면이작업화면으로전환된다. : 운전모드를수동운전모드로전환한다. : 설정된파라메터를하드디스크에저장하고저장된파라메터를사용하기위하여 열기 기능이있다. 열기 : 이미저장된파일을불러온다. 저장 : 현재설정된파라메터를현작업파일에저장한다. 다른이름으로저장 : 새로운파일명으로현재설정된파라메터를저장한다.
1. 메인메뉴 : 이버튼을누르면입출력신호에의하여자동검사를실시한다. 이버튼을누르면화면이작업화면으로전환된다. : 운전모드를수동운전모드로전환한다. : 설정된파라메터를하드디스크에저장하고저장된파라메터를사용하기위하여 열기 기능이있다. 열기 : 이미저장된파일을불러온다. 저장 : 현재설정된파라메터를현작업파일에저장한다. 다른이름으로저장 : 새로운파일명으로현재설정된파라메터를저장한다.
이미지 워핑과 모핑
 제 6 장영상워핑과모핑 학습목표 다음기하학적처리의개념을설명할수있고프로그램을작성할수있다 영상워핑 영상모핑 2014-11-11 영상처리 2 영상워핑 (Warpng) 픽셀의위치를이동하는기하학적처리 회전, 이동, 확대 / 축소등의기하학적처리와의차이점 픽셀별로이동정도가다름 고무종이위에그려진영상을임의로구부리는효과를낼수있음 2014-11-11 영상처리 3 영상워핑 (Warpng)
제 6 장영상워핑과모핑 학습목표 다음기하학적처리의개념을설명할수있고프로그램을작성할수있다 영상워핑 영상모핑 2014-11-11 영상처리 2 영상워핑 (Warpng) 픽셀의위치를이동하는기하학적처리 회전, 이동, 확대 / 축소등의기하학적처리와의차이점 픽셀별로이동정도가다름 고무종이위에그려진영상을임의로구부리는효과를낼수있음 2014-11-11 영상처리 3 영상워핑 (Warpng)
(52) CPC 특허분류 B01D 53/62 ( ) Y02C 10/10 ( ) (72) 발명자 이정현 대전광역시서구대덕대로 246 넥서스밸리 B 동 1417 호 박영철 대전광역시유성구반석동로 33 반석마을 5 단지아파트 505 동 201 호 이발명
 CPC 특허분류 B01D 53/62 ( ) Y02C 10/10 ( ) (72) 발명자 이정현 대전광역시서구대덕대로 246 넥서스밸리 B 동 1417 호 박영철 대전광역시유성구반석동로 33 반석마을 5 단지아파트 505 동 201 호 이발명") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B01D 53/22 (2006.01) B01D 53/62 (2006.01) (52) CPC 특허분류 B01D 53/225 (2013.01) B01D 53/228 (2013.01) (21) 출원번호 10-2015-0076621 (22) 출원일자 2015 년
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B01D 53/22 (2006.01) B01D 53/62 (2006.01) (52) CPC 특허분류 B01D 53/225 (2013.01) B01D 53/228 (2013.01) (21) 출원번호 10-2015-0076621 (22) 출원일자 2015 년
특허청구의 범위 청구항 1 일반전화를 이용한 위험 알림시스템 및 실시간 영상전송 장치에서 CID(콜백넘버) 장치를 포함한 서버 및 그 장 비를 포함하며, 영상서버와 연동한 형태를 상황실에 전송하여 출동하는 시스템을 포함하는 것을 특징으로 하는 일반전화를 이용한 위험 알
 장치를 포함한 서버 및 그 장 비를 포함하며, 영상서버와 연동한 형태를 상황실에 전송하여 출동하는 시스템을 포함하는 것을 특징으로 하는 일반전화를 이용한 위험 알") (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2014-0008486 (43) 공개일자 2014년01월21일 (51) 국제특허분류(Int. Cl.) G08B 25/08 (2014.01) G08B 21/02 (2006.01) G08B 13/196 (2006.01) (21) 출원번호 10-2012-0075069 (22) 출원일자
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2014-0008486 (43) 공개일자 2014년01월21일 (51) 국제특허분류(Int. Cl.) G08B 25/08 (2014.01) G08B 21/02 (2006.01) G08B 13/196 (2006.01) (21) 출원번호 10-2012-0075069 (22) 출원일자
(72) 발명자 오승용 경기도안산시상록구오목로 11 길 45, 202 호 ( 본오동 ) 박영욱 경기도수원시권선구당진로 31 번길 16, 한라비발디 202 동 1201 호 ( 당수동 ) 고대화 경기도수원시권선구금호로 189 번길 82-12, 202 호 ( 구운동 ) 김준
 발명자 오승용 경기도안산시상록구오목로 11 길 45, 202 호 ( 본오동 ) 박영욱 경기도수원시권선구당진로 31 번길 16, 한라비발디 202 동 1201 호 ( 당수동 ) 고대화 경기도수원시권선구금호로 189 번길 82-12, 202 호 ( 구운동 ) 김준") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2013년06월24일 (11) 등록번호 10-1278021 (24) 등록일자 2013년06월18일 (51) 국제특허분류 (Int. Cl.) B65G 1/12 (2006.01) B65G 1/06 (2006.01) H01L 21/677 (2006.01) B25J 5/00 (2006.01)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2013년06월24일 (11) 등록번호 10-1278021 (24) 등록일자 2013년06월18일 (51) 국제특허분류 (Int. Cl.) B65G 1/12 (2006.01) B65G 1/06 (2006.01) H01L 21/677 (2006.01) B25J 5/00 (2006.01)
(72) 발명자 김현태 부산광역시수영구광안 2 동 SK 뷰아파트 김규영 부산광역시동래구온천 동 803 호 이발명을지원한국가연구개발사업 과제고유번호 B 부처명 지식경제부 연구사업명 정보통신기반구축사
 발명자 김현태 부산광역시수영구광안 2 동 SK 뷰아파트 김규영 부산광역시동래구온천 동 803 호 이발명을지원한국가연구개발사업 과제고유번호 B 부처명 지식경제부 연구사업명 정보통신기반구축사") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) G06T 7/20 (2006.01) (21) 출원번호 10-2011-0125814 (22) 출원일자 2011 년 11 월 29 일 심사청구일자 전체청구항수 : 총 5 항 2011 년 11 월 29 일 (54) 발명의명칭터널유고시스템의객체인식방법 (11) 공개번호
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) G06T 7/20 (2006.01) (21) 출원번호 10-2011-0125814 (22) 출원일자 2011 년 11 월 29 일 심사청구일자 전체청구항수 : 총 5 항 2011 년 11 월 29 일 (54) 발명의명칭터널유고시스템의객체인식방법 (11) 공개번호
문제지 제시문 2 보이지 않는 영역에 대한 정보를 얻기 위하여 관측된 다른 정보를 분석하여 역으로 미 관측 영역 에 대한 정보를 얻을 수 있다. 가령 주어진 영역에 장애물이 있는 경우 한 끝 점에서 출발하여 다른 끝 점에 도달하는 최단 경로의 개수를 분석하여 장애물의
 제시문 문제지 2015학년도 대학 신입학생 수시모집 일반전형 면접 및 구술고사 수학 제시문 1 하나의 동전을 던질 때, 앞면이나 뒷면이 나온다. 번째 던지기 전까지 뒷면이 나온 횟수를 라 하자( ). 처음 던지기 전 가진 점수를 점이라 하고, 번째 던졌을 때, 동전의 뒷면이 나오면 가지고 있던 점수를 그대로 두고, 동전의 앞면이 나오면 가지고 있던 점수를 배
제시문 문제지 2015학년도 대학 신입학생 수시모집 일반전형 면접 및 구술고사 수학 제시문 1 하나의 동전을 던질 때, 앞면이나 뒷면이 나온다. 번째 던지기 전까지 뒷면이 나온 횟수를 라 하자( ). 처음 던지기 전 가진 점수를 점이라 하고, 번째 던졌을 때, 동전의 뒷면이 나오면 가지고 있던 점수를 그대로 두고, 동전의 앞면이 나오면 가지고 있던 점수를 배
Sequences with Low Correlation
 레일리페이딩채널에서의 DPC 부호의성능분석 * 김준성, * 신민호, * 송홍엽 00 년 7 월 1 일 * 연세대학교전기전자공학과부호및정보이론연구실 발표순서 서론 복호화방법 R-BP 알고리즘 UMP-BP 알고리즘 Normalied-BP 알고리즘 무상관레일리페이딩채널에서의표준화인수 모의실험결과및고찰 결론 Codig ad Iformatio Theory ab /15
레일리페이딩채널에서의 DPC 부호의성능분석 * 김준성, * 신민호, * 송홍엽 00 년 7 월 1 일 * 연세대학교전기전자공학과부호및정보이론연구실 발표순서 서론 복호화방법 R-BP 알고리즘 UMP-BP 알고리즘 Normalied-BP 알고리즘 무상관레일리페이딩채널에서의표준화인수 모의실험결과및고찰 결론 Codig ad Iformatio Theory ab /15
고 학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ] 1. 의값은? ( 단, ) [ 점 ] 다항식 이 로인수분해될때, 의값은? ( 단,,
![고 학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ] 1. 의값은? ( 단, ) [ 점 ] 다항식 이 로인수분해될때, 의값은? ( 단,,](/thumbs/97/131116939.jpg "고 학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ] 1. 의값은? ( 단, ) [ 점 ] 다항식 이 로인수분해될때, 의값은? ( 단,,") 고 208학년도 9월고수학 전국연합학력평가영역문제지 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ]. 의값은? ( 단, ) [ 점 ] 2 3 2 3 4 5 4 5 2. 다항식 이 로인수분해될때, 의값은? ( 단,, 는상수이다.) [ 점 ] 4. 좌표평면위의두점 A, B 사이의거리가 일때, 양수 의값은? [ 점 ] 2 3 4 5 2
고 208학년도 9월고수학 전국연합학력평가영역문제지 제 2 교시 수학영역 5 지선다형 3. 두다항식, 에대하여 는? [ 점 ]. 의값은? ( 단, ) [ 점 ] 2 3 2 3 4 5 4 5 2. 다항식 이 로인수분해될때, 의값은? ( 단,, 는상수이다.) [ 점 ] 4. 좌표평면위의두점 A, B 사이의거리가 일때, 양수 의값은? [ 점 ] 2 3 4 5 2
PowerPoint 프레젠테이션
 실습 1 배효철 th1g@nate.com 1 목차 조건문 반복문 System.out 구구단 모양만들기 Up & Down 2 조건문 조건문의종류 If, switch If 문 조건식결과따라중괄호 { 블록을실행할지여부결정할때사용 조건식 true 또는 false값을산출할수있는연산식 boolean 변수 조건식이 true이면블록실행하고 false 이면블록실행하지않음 3
실습 1 배효철 th1g@nate.com 1 목차 조건문 반복문 System.out 구구단 모양만들기 Up & Down 2 조건문 조건문의종류 If, switch If 문 조건식결과따라중괄호 { 블록을실행할지여부결정할때사용 조건식 true 또는 false값을산출할수있는연산식 boolean 변수 조건식이 true이면블록실행하고 false 이면블록실행하지않음 3
(72) 발명자 박세웅 서울특별시관악구신림동산 56-1 서울대학교뉴미디어통신공동연구소 최진구 서울특별시영등포구당산동 2 가대우메종아파트 101 동 909 호 - 2 -
 발명자 박세웅 서울특별시관악구신림동산 56-1 서울대학교뉴미디어통신공동연구소 최진구 서울특별시영등포구당산동 2 가대우메종아파트 101 동 909 호 - 2 -") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) H04B 7/26 (2006.01) H04B 7/155 (2006.01) H04Q 7/30 (2006.01) H04Q 7/20 (2006.01) (21) 출원번호 10-2006-0085572 (22) 출원일자 2006 년 09 월 06 일 심사청구일자 2006 년 09 월
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) H04B 7/26 (2006.01) H04B 7/155 (2006.01) H04Q 7/30 (2006.01) H04Q 7/20 (2006.01) (21) 출원번호 10-2006-0085572 (22) 출원일자 2006 년 09 월 06 일 심사청구일자 2006 년 09 월
이발명을지원한국가연구개발사업 과제고유번호 부처명 미래창조부 연구관리전문기관 한국산업기술평가관리원 연구사업명 산업융합원천기술개발 연구과제명 단일노드 48TB 이상을지원하는개방형하둡스토리지어플라이언스 (Hadoop Storage Appliance) 개발 기
 개발 기") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2015년12월03일 (11) 등록번호 10-1573375 (24) 등록일자 2015년11월25일 (51) 국제특허분류 (Int. Cl.) G06F 12/08 (2006.01) (21) 출원번호 10-2013-0131411 (22) 출원일자 2013 년 10 월 31 일 심사청구일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2015년12월03일 (11) 등록번호 10-1573375 (24) 등록일자 2015년11월25일 (51) 국제특허분류 (Int. Cl.) G06F 12/08 (2006.01) (21) 출원번호 10-2013-0131411 (22) 출원일자 2013 년 10 월 31 일 심사청구일자
특허청구의 범위 청구항 1 알람을 출력하기 위한 출력 인터페이스; 사용자의 안구전도값을 측정하기 위한 안구전도 측정부; 및 상기 안구전도 측정부가 측정한 안구전도값을 이용하여 사용자의 졸음 상태를 감지하고, 그에 따라 상기 출력 인터페이스로 알람을 출력하는 졸음상태 판
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) A61B 5/0496 (2006.01) A61B 5/18 (2006.01) (21) 출원번호 10-2009-0051767 (22) 출원일자 2009년06월11일 심사청구일자 2009년06월11일 (65) 공개번호 10-2010-0133070 (43) 공개일자 2010년12월21일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) A61B 5/0496 (2006.01) A61B 5/18 (2006.01) (21) 출원번호 10-2009-0051767 (22) 출원일자 2009년06월11일 심사청구일자 2009년06월11일 (65) 공개번호 10-2010-0133070 (43) 공개일자 2010년12월21일
(72) 발명자 배경렬 대구광역시동구아양로 37 길 ( 신암동 ) 손현식 대구광역시동구송라로 109( 신암동 ) 이발명을지원한국가연구개발사업 과제고유번호 부처명 지식경제부 연구사업명 정보통신기술인력양성 연구과제명 스마트자동차를위한 AU
 발명자 배경렬 대구광역시동구아양로 37 길 ( 신암동 ) 손현식 대구광역시동구송라로 109( 신암동 ) 이발명을지원한국가연구개발사업 과제고유번호 부처명 지식경제부 연구사업명 정보통신기술인력양성 연구과제명 스마트자동차를위한 AU") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04N 13/00 (2006.01) (21) 출원번호 10-2012-0128809 (22) 출원일자 2012 년 11 월 14 일 심사청구일자 2012 년 11 월 14 일 (65) 공개번호 10-2013-0058611 (43) 공개일자 2013 년 06
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04N 13/00 (2006.01) (21) 출원번호 10-2012-0128809 (22) 출원일자 2012 년 11 월 14 일 심사청구일자 2012 년 11 월 14 일 (65) 공개번호 10-2013-0058611 (43) 공개일자 2013 년 06
Python과 함께 배우는 신호 해석 제 5 강. 복소수 연산 및 Python을 이용한 복소수 연산 (제 2 장. 복소수 기초)
") 제 5 강. 복소수연산및 을이용한복소수연산 ( 제 2 장. 복소수기초 ) 한림대학교전자공학과 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 1 배울내용 복소수의기본개념복소수의표현오일러 (Euler) 공식복소수의대수연산 1의 N 승근 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 2 복소수의 4 칙연산 복소수의덧셈과뺄셈에는직각좌표계표현을사용하고,
제 5 강. 복소수연산및 을이용한복소수연산 ( 제 2 장. 복소수기초 ) 한림대학교전자공학과 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 1 배울내용 복소수의기본개념복소수의표현오일러 (Euler) 공식복소수의대수연산 1의 N 승근 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 2 복소수의 4 칙연산 복소수의덧셈과뺄셈에는직각좌표계표현을사용하고,
Vector Differential: 벡터 미분 Yonghee Lee October 17, 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표
 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표") Vector Differential: 벡터 미분 Yonhee Lee October 7, 08 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표기법을 정의하는 방법이다 보통 스칼라(scalar)에 대한 미분은 일분수 함수 f : < < 또는 다변수 함수(function
Vector Differential: 벡터 미분 Yonhee Lee October 7, 08 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표기법을 정의하는 방법이다 보통 스칼라(scalar)에 대한 미분은 일분수 함수 f : < < 또는 다변수 함수(function
한것으로스마트단말기에의하여드론조종앱을설치하는제 1 단계 ; 스마트단말기에의하여드론의불루투스통 신부에부여된고유식별번호를입력저장하고드론의불루투스를인식하며드론의블루투스통신부로부터회신되 는신호의수신레벨을분석하여최대통신거리를확인하여저장하는제 2 단계 ; 스마트단말기에의하여최대통
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B64C 13/20 (2006.01) B64C 39/02 (2006.01) G05D 1/00 (2006.01) H04M 1/725 (2006.01) (52) CPC 특허분류 B64C 13/20 (2013.01) B64C 39/024 (2013.01) (21)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B64C 13/20 (2006.01) B64C 39/02 (2006.01) G05D 1/00 (2006.01) H04M 1/725 (2006.01) (52) CPC 특허분류 B64C 13/20 (2013.01) B64C 39/024 (2013.01) (21)
제 2 교시 2019 학년도 3 월고 1 전국연합학력평가문제지수학영역 1 5 지선다형 1. 의값은? [2점] 일차방정식 의해는? [2 점 ] 두수, 의최대공약수는? [2 점 ] 일차함수 의그래프에서
![제 2 교시 2019 학년도 3 월고 1 전국연합학력평가문제지수학영역 1 5 지선다형 1. 의값은? [2점] 일차방정식 의해는? [2 점 ] 두수, 의최대공약수는? [2 점 ] 일차함수 의그래프에서](/thumbs/102/153877712.jpg "제 2 교시 2019 학년도 3 월고 1 전국연합학력평가문제지수학영역 1 5 지선다형 1. 의값은? [2점] 일차방정식 의해는? [2 점 ] 두수, 의최대공약수는? [2 점 ] 일차함수 의그래프에서") 제 2 교시 2019 학년도 3 월고 1 전국연합학력평가문제지 1 5 지선다형 1. 의값은? [2점] 1 2 3 4 5 3. 일차방정식 의해는? [2 점 ] 1 2 3 4 5 2. 두수, 의최대공약수는? [2 점 ] 1 2 3 4 5 4. 일차함수 의그래프에서 절편과 절편의합은? [3 점 ] 1 2 3 4 5 1 12 2 5. 함수 의그래프가두점, 를지날때,
제 2 교시 2019 학년도 3 월고 1 전국연합학력평가문제지 1 5 지선다형 1. 의값은? [2점] 1 2 3 4 5 3. 일차방정식 의해는? [2 점 ] 1 2 3 4 5 2. 두수, 의최대공약수는? [2 점 ] 1 2 3 4 5 4. 일차함수 의그래프에서 절편과 절편의합은? [3 점 ] 1 2 3 4 5 1 12 2 5. 함수 의그래프가두점, 를지날때,
Microsoft PowerPoint - IP11.pptx
 열한번째강의카메라 1/43 1/16 Review 2/43 2/16 평균값 중간값 Review 3/43 3/16 캐니에지추출 void cvcanny(const CvArr* image, CvArr* edges, double threshold1, double threshold2, int aperture_size = 3); aperture_size = 3 aperture_size
열한번째강의카메라 1/43 1/16 Review 2/43 2/16 평균값 중간값 Review 3/43 3/16 캐니에지추출 void cvcanny(const CvArr* image, CvArr* edges, double threshold1, double threshold2, int aperture_size = 3); aperture_size = 3 aperture_size
많이 이용하는 라면,햄버그,과자,탄산음료등은 무서운 병을 유발하고 비만의 원인 식품 이다. 8,등겨에 흘려 보낸 영양을 되 찾을 수 있다. 도정과정에서 등겨에 흘려 보낸 영양 많은 쌀눈과 쌀껍질의 영양을 등겨를 물에 우러나게하여 장시간 물에 담가 두어 영양을 되 찾는다
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) A23L 1/307 (2006.01) C02F 1/68 (2006.01) (21) 출원번호 20-2011-0002850 (22) 출원일자 2011년04월05일 심사청구일자 2011년04월05일 (11) 공개번호 20-2011-0004312 (43) 공개일자 2011년05월03일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) A23L 1/307 (2006.01) C02F 1/68 (2006.01) (21) 출원번호 20-2011-0002850 (22) 출원일자 2011년04월05일 심사청구일자 2011년04월05일 (11) 공개번호 20-2011-0004312 (43) 공개일자 2011년05월03일
LIDAR와 영상 Data Fusion에 의한 건물 자동추출
 i ii iii iv v vi vii 1 2 3 4 Image Processing Image Pyramid Edge Detection Epipolar Image Image Matching LIDAR + Photo Cross correlation Least Squares Epipolar Line Matching Low Level High Level Space
i ii iii iv v vi vii 1 2 3 4 Image Processing Image Pyramid Edge Detection Epipolar Image Image Matching LIDAR + Photo Cross correlation Least Squares Epipolar Line Matching Low Level High Level Space
(72) 발명자 권욱현 서울특별시관악구관악로 1, 서울대학교자동화연구소 133 동 306 호 ( 신림동 ) 신수용 서울특별시양천구목동동로 130, 목동아파트 동 1201 호 ( 신정동 ) 최재영 서울특별시관악구서림 11 길 23, 308 호 ( 신림동 ) 이
 발명자 권욱현 서울특별시관악구관악로 1, 서울대학교자동화연구소 133 동 306 호 ( 신림동 ) 신수용 서울특별시양천구목동동로 130, 목동아파트 동 1201 호 ( 신정동 ) 최재영 서울특별시관악구서림 11 길 23, 308 호 ( 신림동 ) 이") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04L 12/28 (2006.01) (21) 출원번호 10-2006-0016507 (22) 출원일자 2006 년 02 월 21 일 심사청구일자 2011 년 01 월 19 일 (65) 공개번호 10-2007-0083321 (43) 공개일자 2007 년 08
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04L 12/28 (2006.01) (21) 출원번호 10-2006-0016507 (22) 출원일자 2006 년 02 월 21 일 심사청구일자 2011 년 01 월 19 일 (65) 공개번호 10-2007-0083321 (43) 공개일자 2007 년 08
ICT À¶ÇÕÃÖÁ¾
 Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
명세서청구범위청구항 1 일단이아래로경사지게형성되고타단의측면은제 1 링크 (11) 및제 2 링크 (12) 를갖는원형링크 (13) 의상기제 2 링크에연결되고상기원형링크를매개로회전가능한사용자의안착을위한좌석 (10); 일단이상기좌석의일단과상응하게아래로경사지게형성되고제 3 링크
 및제 2 링크 (12) 를갖는원형링크 (13) 의상기제 2 링크에연결되고상기원형링크를매개로회전가능한사용자의안착을위한좌석 (10); 일단이상기좌석의일단과상응하게아래로경사지게형성되고제 3 링크") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) A61G 5/14 (2006.01) A47C 7/62 (2006.01) (21) 출원번호 10-2014-0162951 (22) 출원일자 2014 년 11 월 20 일 심사청구일자 전체청구항수 : 총 6 항 2016 년 05 월 19 일 (11) 공개번호 10-2016-0060891
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) A61G 5/14 (2006.01) A47C 7/62 (2006.01) (21) 출원번호 10-2014-0162951 (22) 출원일자 2014 년 11 월 20 일 심사청구일자 전체청구항수 : 총 6 항 2016 년 05 월 19 일 (11) 공개번호 10-2016-0060891
실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
서 인코딩한 데이터를 무선으로 송신하기 위한 무선 송신 수단; 및 통화중 상기 입력 수단으로부터의 음원 데이터 전송신 호에 따라 상기 저장 수단에 저장되어 있는 해당 음원 데이터를 상기 디코딩 수단에 의해 디코딩하고, 상기 디코딩한 음원 데이터와 상기 입력 수단을 통해
 (51) Int. Cl. H04B 1/40 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월23일 10-0646983 2006년11월09일 (21) 출원번호 10-2004-0053063 (65) 공개번호 10-2006-0004082 (22) 출원일자 2004년07월08일
(51) Int. Cl. H04B 1/40 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월23일 10-0646983 2006년11월09일 (21) 출원번호 10-2004-0053063 (65) 공개번호 10-2006-0004082 (22) 출원일자 2004년07월08일
수리영역 5. 서로다른두개의주사위를동시에던져서나온두눈의수의곱 이짝수일때, 나온두눈의수의합이 또는 일확률은? 5) 의전개식에서상수항이존재하도록하는모든자 연수 의값의합은? 7) 다음순서도에서인쇄되는 의값은? 6) 8. 어떤특산
 의전개식에서상수항이존재하도록하는모든자 연수 의값의합은? 7) 다음순서도에서인쇄되는 의값은? 6) 8. 어떤특산") 제 2 교시 2008 학년도 10 월고 3 전국연합학력평가문제지 수리영역 성명수험번호 3 1 먼저수험생이선택한응시유형의문제지인지확인하시오. 문제지에성명과수험번호를정확히기입하시오. 답안지에수험번호, 응시유형및답을표기할때는반드시 수험생이지켜야할일 에따라표기하시오. 단답형답의숫자에 0 이포함된경우, 0 을 OMR 답안지에반드시표기해야합니다. 문항에따라배점이다르니,
제 2 교시 2008 학년도 10 월고 3 전국연합학력평가문제지 수리영역 성명수험번호 3 1 먼저수험생이선택한응시유형의문제지인지확인하시오. 문제지에성명과수험번호를정확히기입하시오. 답안지에수험번호, 응시유형및답을표기할때는반드시 수험생이지켜야할일 에따라표기하시오. 단답형답의숫자에 0 이포함된경우, 0 을 OMR 답안지에반드시표기해야합니다. 문항에따라배점이다르니,
Microsoft PowerPoint - LA_ch6_1 [호환 모드]
![Microsoft PowerPoint - LA_ch6_1 [호환 모드]](/thumbs/94/118756949.jpg "Microsoft PowerPoint - LA_ch6_1 [호환 모드]") Chapter 6 선형변환은무질서한과정과공학제어시스템의설계에관한연구에사용된다. 또한전기및음성신호로부터의소음여과와컴퓨터그래픽등에사용된다. 선형변환 Liear rasformatio 6. 6 변환으로서의행렬 Matrices as rasformatios 6. 변환으로서의행렬 6. 선형연산자의기하학 6.3 핵과치역 6.4 선형변환의합성과가역성 6.5 컴퓨터그래픽 si
Chapter 6 선형변환은무질서한과정과공학제어시스템의설계에관한연구에사용된다. 또한전기및음성신호로부터의소음여과와컴퓨터그래픽등에사용된다. 선형변환 Liear rasformatio 6. 6 변환으로서의행렬 Matrices as rasformatios 6. 변환으로서의행렬 6. 선형연산자의기하학 6.3 핵과치역 6.4 선형변환의합성과가역성 6.5 컴퓨터그래픽 si
등록특허 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 ( ) (21) 출원번호 (22) 출원일자 2011 년 12 월 28 일 심사
 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 ( ) (21) 출원번호 (22) 출원일자 2011 년 12 월 28 일 심사") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 (2006.01) (21) 출원번호 10-2011-0144999 (22) 출원일자 2011 년 12 월 28 일 심사청구일자 2011 년 12 월 28 일 (65) 공개번호 10-2013-0076416 (43) 공개일자 2013 년 07
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 (2006.01) (21) 출원번호 10-2011-0144999 (22) 출원일자 2011 년 12 월 28 일 심사청구일자 2011 년 12 월 28 일 (65) 공개번호 10-2013-0076416 (43) 공개일자 2013 년 07
도형의닮음 1 강 - 닮은도형과닮음중심 사이버스쿨우프선생 닮음도형 : 일정한비율로확대또는축소하였을때닮음모양의도형 기호 : ABCD A'B'C'D' [ 예제 1 ] 그림에서와같이두닮은도형 ABCD 와 A'B'C'D' 에서대응점, 대
![도형의닮음 1 강 - 닮은도형과닮음중심 사이버스쿨우프선생 닮음도형 : 일정한비율로확대또는축소하였을때닮음모양의도형 기호 : ABCD A'B'C'D' [ 예제 1 ] 그림에서와같이두닮은도형 ABCD 와 A'B'C'D' 에서대응점, 대](/thumbs/97/132707720.jpg "도형의닮음 1 강 - 닮은도형과닮음중심 사이버스쿨우프선생 닮음도형 : 일정한비율로확대또는축소하였을때닮음모양의도형 기호 : ABCD A'B'C'D' [ 예제 1 ] 그림에서와같이두닮은도형 ABCD 와 A'B'C'D' 에서대응점, 대") 도형의닮음 1 강 - 닮은도형과닮음중심 사이버스쿨우프선생 www.cyberschool.co.kr 닮음도형 : 일정한비율로확대또는축소하였을때닮음모양의도형 기호 : '''' [ 예제 1 ] 그림에서와같이두닮은도형 와 '''' 에서대응점, 대응변을말하여라. ' ' ' ' [ 풀이] 대응점 : 와 ', 와 ', 와 ', 와 ' 대응변 : 와 '', 와 '', 와 '',
도형의닮음 1 강 - 닮은도형과닮음중심 사이버스쿨우프선생 www.cyberschool.co.kr 닮음도형 : 일정한비율로확대또는축소하였을때닮음모양의도형 기호 : '''' [ 예제 1 ] 그림에서와같이두닮은도형 와 '''' 에서대응점, 대응변을말하여라. ' ' ' ' [ 풀이] 대응점 : 와 ', 와 ', 와 ', 와 ' 대응변 : 와 '', 와 '', 와 '',
기본도형과작도 1 강 - 연습문제 1. 오른쪽그림과같이직선l 위에점,, 가있을때, 옳지않은것은? 1 = 2 = 3 = 직선l 4 = 5 = l 2. 오른쪽그림에서 = = 이다. 다음( ) 안에알맞은수를쓰시오. 1 =( 2 =( 3 =( 4 =( ) ) ) ) 3. 한평
 안에알맞은수를쓰시오. 1 =( 2 =( 3 =( 4 =( ) ) ) ) 3. 한평") 기본도형과작도 1 강 - 점, 선, 면 사이버스쿨우프선생 www.cyberschool.co.kr 도형의기본요소 1. 점 : 크기가없다. 0 차원, 있는것처럼점을찍는다. 2. 선 : 점이움직인자취( 흔적), 1차원 3. 면 : 선이움직인자취, 2차원 교점 : ( 선 + 선), ( 선 + 면) 이만나는점 교선 : ( 면 + 면) 이만나는선 [ 예제 1] 삼각뿔에서교점과교선의수는?
기본도형과작도 1 강 - 점, 선, 면 사이버스쿨우프선생 www.cyberschool.co.kr 도형의기본요소 1. 점 : 크기가없다. 0 차원, 있는것처럼점을찍는다. 2. 선 : 점이움직인자취( 흔적), 1차원 3. 면 : 선이움직인자취, 2차원 교점 : ( 선 + 선), ( 선 + 면) 이만나는점 교선 : ( 면 + 면) 이만나는선 [ 예제 1] 삼각뿔에서교점과교선의수는?
1 경영학을 위한 수학 Final Exam 2015/12/12(토) 13:00-15:00 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오. 1. (각 6점) 다음 적분을 구하시오 Z 1 4 Z 1 (x + 1) dx (a) 1 (x 1)4 dx 1 Solut
 13:00-15:00 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오. 1. (각 6점) 다음 적분을 구하시오 Z 1 4 Z 1 (x + 1) dx (a) 1 (x 1)4 dx 1 Solut") 경영학을 위한 수학 Fial Eam 5//(토) :-5: 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오.. (각 6점) 다음 적분을 구하시오 4 ( ) (a) ( )4 8 8 (b) d이 성립한다. d C C log log (c) 이다. 양변에 적분을 취하면 log C (d) 라 하자. 그러면 d 4이다. 9 9 4 / si (e) cos si
경영학을 위한 수학 Fial Eam 5//(토) :-5: 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오.. (각 6점) 다음 적분을 구하시오 4 ( ) (a) ( )4 8 8 (b) d이 성립한다. d C C log log (c) 이다. 양변에 적분을 취하면 log C (d) 라 하자. 그러면 d 4이다. 9 9 4 / si (e) cos si
1 peaieslvfp3 1. 두점사이의거리 수직선위의두점사이의거리를구할수있다. 좌표평면위의두점사이의거리를구할수있다. 수직선위의두점사이의거리 todrkrgo qhqtlek 오른쪽그림은충무로역을중심으로한서울시지하철 3`호선노선도의일부분이다. 충무로역을` 0, 을지로 3`
 peaieslvfp. 두점사이의거리 수직선위의두점사이의거리를구할수있다. 좌표평면위의두점사이의거리를구할수있다. 수직선위의두점사이의거리 todrkrgo qhqtlek 오른쪽그림은충무로역을중심으로한서울시지하철 `호선노선도의일부분이다. 충무로역을` 0, 을지로 `가역을 ``로나타낼때, 다음물음에답하여라. 독립문 경복궁 안국종로 가을지로 가충무로동대입구약수금호옥수압구정잠원신사
peaieslvfp. 두점사이의거리 수직선위의두점사이의거리를구할수있다. 좌표평면위의두점사이의거리를구할수있다. 수직선위의두점사이의거리 todrkrgo qhqtlek 오른쪽그림은충무로역을중심으로한서울시지하철 `호선노선도의일부분이다. 충무로역을` 0, 을지로 `가역을 ``로나타낼때, 다음물음에답하여라. 독립문 경복궁 안국종로 가을지로 가충무로동대입구약수금호옥수압구정잠원신사
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
Microsoft PowerPoint - 26.pptx
 이산수학 () 관계와그특성 (Relations and Its Properties) 2011년봄학기 강원대학교컴퓨터과학전공문양세 Binary Relations ( 이진관계 ) Let A, B be any two sets. A binary relation R from A to B, written R:A B, is a subset of A B. (A 에서 B 로의이진관계
이산수학 () 관계와그특성 (Relations and Its Properties) 2011년봄학기 강원대학교컴퓨터과학전공문양세 Binary Relations ( 이진관계 ) Let A, B be any two sets. A binary relation R from A to B, written R:A B, is a subset of A B. (A 에서 B 로의이진관계
; struct point p[10] = {{1, 2, {5, -3, {-3, 5, {-6, -2, {2, 2, {-3, -3, {-9, 2, {7, 8, {-6, 4, {8, -5; for (i = 0; i < 10; i++){ if (p[i].x > 0 && p[i
![; struct point p[10] = {{1, 2, {5, -3, {-3, 5, {-6, -2, {2, 2, {-3, -3, {-9, 2, {7, 8, {-6, 4, {8, -5; for (i = 0; i < 10; i++){ if (p[i].x > 0 && p[i](/thumbs/93/111625944.jpg "; struct point p[10] = {{1, 2, {5, -3, {-3, 5, {-6, -2, {2, 2, {-3, -3, {-9, 2, {7, 8, {-6, 4, {8, -5; for (i = 0; i < 10; i++){ if (p[i].x > 0 && p[i") ; struct point p; printf("0이아닌점의좌표를입력하시오 : "); scanf("%d %d", &p.x, &p.y); if (p.x > 0 && p.y > 0) printf("1사분면에있다.\n"); if (p.x < 0 && p.y > 0) printf("2사분면에있다.\n"); if (p.x < 0 && p.y < 0) printf("3사분면에있다.\n");
; struct point p; printf("0이아닌점의좌표를입력하시오 : "); scanf("%d %d", &p.x, &p.y); if (p.x > 0 && p.y > 0) printf("1사분면에있다.\n"); if (p.x < 0 && p.y > 0) printf("2사분면에있다.\n"); if (p.x < 0 && p.y < 0) printf("3사분면에있다.\n");
Structure and Interpretation of Computer Programs: Assignment 3 Seung-Hoon Na October 4, George (아래 3개의 문제에 대한 구현이 모두 포함된 george.rkt파일을 제출하시오.
 Structure and Interpretation of Computer Programs: Assignment 3 Seung-Hoon Na October 4, 2018 1 George (아래 3개의 문제에 대한 구현이 모두 포함된 george.rkt파일을 제출하시오. 실행후 Problem 1.3에 대한 Display결과가 나와야 함) George 그림은 다음과
Structure and Interpretation of Computer Programs: Assignment 3 Seung-Hoon Na October 4, 2018 1 George (아래 3개의 문제에 대한 구현이 모두 포함된 george.rkt파일을 제출하시오. 실행후 Problem 1.3에 대한 Display결과가 나와야 함) George 그림은 다음과
슬라이드 1
 CHAP 2: 순환 (Recursion) 순환 (recursion) 이란? 알고리즘이나함수가수행도중에자기자신을다시호출하여문제를해결하는기법 정의자체가순환적으로 되어있는경우에적합한방법 순환 (recursion) 의예 팩토리얼값구하기 피보나치수열 1 n! n*( n 1)! fib( n) 0 1 fib( n 2) n n 0 ` 1 fib( n 1) if n 0 if
CHAP 2: 순환 (Recursion) 순환 (recursion) 이란? 알고리즘이나함수가수행도중에자기자신을다시호출하여문제를해결하는기법 정의자체가순환적으로 되어있는경우에적합한방법 순환 (recursion) 의예 팩토리얼값구하기 피보나치수열 1 n! n*( n 1)! fib( n) 0 1 fib( n 2) n n 0 ` 1 fib( n 1) if n 0 if
WINDOW FUNCTION 의이해와활용방법 엑셈컨설팅본부 / DB 컨설팅팀정동기 개요 Window Function 이란행과행간의관계를쉽게정의할수있도록만든함수이다. 윈도우함수를활용하면복잡한 SQL 들을하나의 SQL 문장으로변경할수있으며반복적으로 ACCESS 하는비효율역
 WINDOW FUNCTION 의이해와활용방법 엑셈컨설팅본부 / DB 컨설팅팀정동기 개요 Window Function 이란행과행간의관계를쉽게정의할수있도록만든함수이다. 윈도우함수를활용하면복잡한 SQL 들을하나의 SQL 문장으로변경할수있으며반복적으로 ACCESS 하는비효율역시쉽게해결할수있다. 이번화이트페이퍼에서는 Window Function 중순위 RANK, ROW_NUMBER,
WINDOW FUNCTION 의이해와활용방법 엑셈컨설팅본부 / DB 컨설팅팀정동기 개요 Window Function 이란행과행간의관계를쉽게정의할수있도록만든함수이다. 윈도우함수를활용하면복잡한 SQL 들을하나의 SQL 문장으로변경할수있으며반복적으로 ACCESS 하는비효율역시쉽게해결할수있다. 이번화이트페이퍼에서는 Window Function 중순위 RANK, ROW_NUMBER,
등록특허 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06Q 30/06A0 ( ) (21) 출원번호 (22) 출원일자 2009 년 08 월 19 일
 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06Q 30/06A0 ( ) (21) 출원번호 (22) 출원일자 2009 년 08 월 19 일") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06Q 30/06A0 (2012.01) (21) 출원번호 10-2009-0076942 (22) 출원일자 2009 년 08 월 19 일 심사청구일자 2009 년 08 월 19 일 (65) 공개번호 10-2011-0019289 (43) 공개일자 2011 년
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06Q 30/06A0 (2012.01) (21) 출원번호 10-2009-0076942 (22) 출원일자 2009 년 08 월 19 일 심사청구일자 2009 년 08 월 19 일 (65) 공개번호 10-2011-0019289 (43) 공개일자 2011 년
특허청구의범위청구항 1 물을여과하는필터부 ; 상기필터부에물을유동시키는정수관 ; 상기정수관에설치되고, 상기정수관의수류를이용하여전기를발생시키는발전모듈 ; 및상기정수관에배치되고, 상기발전모듈에서발생된전기가공급되고, 상기정수관을따라유동되는정수를전기분해하여살균하는살균모듈 ; 을
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) B01D 35/00 (2006.01) C02F 1/461 (2006.01) C02F 1/467 (2006.01) (21) 출원번호 10-2009-0019000 (22) 출원일자 2009 년 03 월 05 일 심사청구일자 없음 전체청구항수 : 총 4 항 (54) 정수기 (11)
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) B01D 35/00 (2006.01) C02F 1/461 (2006.01) C02F 1/467 (2006.01) (21) 출원번호 10-2009-0019000 (22) 출원일자 2009 년 03 월 05 일 심사청구일자 없음 전체청구항수 : 총 4 항 (54) 정수기 (11)
특허청구의범위청구항 1 다관절로봇의각축별시간에대한위치함수를 4차다항식, 속도함수를 3차다항식, 가속도함수를 2차다항식으로정의하고, 상기위치함수, 속도함수및가속도함수의경계조건을이용하여계수들을계산하여가속구간, 등속구간및감속구간에서의시간에대한위치함수을구하고, 상기가속구간,
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년08월01일 (11) 등록번호 10-1425057 (24) 등록일자 2014년07월24일 (51) 국제특허분류 (Int. Cl.) B25J 13/00 (2006.01) G06F 17/00 (2006.01) (21) 출원번호 10-2013-0028521 (22) 출원일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년08월01일 (11) 등록번호 10-1425057 (24) 등록일자 2014년07월24일 (51) 국제특허분류 (Int. Cl.) B25J 13/00 (2006.01) G06F 17/00 (2006.01) (21) 출원번호 10-2013-0028521 (22) 출원일자
실용신안 등록청구의 범위 청구항 1 톤백마대가 설치될 수 있도록 일정간격을 두고 설치되는 한 쌍의 지지프레임과, 상기 지지프레임과 지지프레임의 상부를 서로 연결하는 한 쌍의 연결프레임과, 상기 연결프레임의 상부에 일정간격을 두고 다수 설치되어 상기 톤백마대와 그 투입구
 (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) (51) 국제특허분류(Int. Cl.) B65B 67/12 (2006.01) B65D 88/16 (2006.01) (21) 출원번호 20-2012-0003587 (22) 출원일자 2012년05월01일 심사청구일자 2012년05월01일 (11) 공개번호 20-2013-0006479 (43) 공개일자
(19) 대한민국특허청(KR) (12) 공개실용신안공보(U) (51) 국제특허분류(Int. Cl.) B65B 67/12 (2006.01) B65D 88/16 (2006.01) (21) 출원번호 20-2012-0003587 (22) 출원일자 2012년05월01일 심사청구일자 2012년05월01일 (11) 공개번호 20-2013-0006479 (43) 공개일자
특허청구의범위청구항 1 복수개의파장대역중적어도하나이상의파장대역의영상인카메라영상을획득하는카메라부 ; 상기카메라영상으로부터배경영역을제거하여표적영역을추출하는전처리부 ; 상기표적영역에서특징파라미터를추출하는특징파라미터추출부 ; 상기특징파라미터를정보화한형상화데이터를생성하는형상화데
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 5/00 (2006.01) G06T 7/00 (2006.01) H04N 9/67 (2006.01) (21) 출원번호 10-2012-0013080 (22) 출원일자 2012 년 02 월 09 일 심사청구일자 (56) 선행기술조사문헌 JP2005286577
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 5/00 (2006.01) G06T 7/00 (2006.01) H04N 9/67 (2006.01) (21) 출원번호 10-2012-0013080 (22) 출원일자 2012 년 02 월 09 일 심사청구일자 (56) 선행기술조사문헌 JP2005286577
특허청구의 범위 청구항 1 앵커(20)를 이용한 옹벽 시공에 사용되는 옹벽패널에 있어서, 단위패널형태의 판 형태로 구성되며, 내부 중앙부가 후방 하부를 향해 기울어지도록 돌출 형성되어, 전면이 오 목하게 들어가고 후면이 돌출된 결속부(11)를 형성하되, 이 결속부(11
를 이용한 옹벽 시공에 사용되는 옹벽패널에 있어서, 단위패널형태의 판 형태로 구성되며, 내부 중앙부가 후방 하부를 향해 기울어지도록 돌출 형성되어, 전면이 오 목하게 들어가고 후면이 돌출된 결속부(11)를 형성하되, 이 결속부(11") (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) E02D 29/02 (2006.01) E02D 17/20 (2006.01) E02B 3/14 (2006.01) (21) 출원번호 10-2010-0089517 (22) 출원일자 2010년09월13일 심사청구일자 (56) 선행기술조사문헌 JP2006037700 A* KR100920461
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) E02D 29/02 (2006.01) E02D 17/20 (2006.01) E02B 3/14 (2006.01) (21) 출원번호 10-2010-0089517 (22) 출원일자 2010년09월13일 심사청구일자 (56) 선행기술조사문헌 JP2006037700 A* KR100920461
OCW_C언어 기초
 초보프로그래머를위한 C 언어기초 4 장 : 연산자 2012 년 이은주 학습목표 수식의개념과연산자및피연산자에대한학습 C 의알아보기 연산자의우선순위와결합방향에대하여알아보기 2 목차 연산자의기본개념 수식 연산자와피연산자 산술연산자 / 증감연산자 관계연산자 / 논리연산자 비트연산자 / 대입연산자연산자의우선순위와결합방향 조건연산자 / 형변환연산자 연산자의우선순위 연산자의결합방향
초보프로그래머를위한 C 언어기초 4 장 : 연산자 2012 년 이은주 학습목표 수식의개념과연산자및피연산자에대한학습 C 의알아보기 연산자의우선순위와결합방향에대하여알아보기 2 목차 연산자의기본개념 수식 연산자와피연산자 산술연산자 / 증감연산자 관계연산자 / 논리연산자 비트연산자 / 대입연산자연산자의우선순위와결합방향 조건연산자 / 형변환연산자 연산자의우선순위 연산자의결합방향
태에서미리정한시간에따라파지력을변화시킬때, 상기미리정한시간에따라검출되는제 2 생체신호에대한특징벡터인제 2 시너지벡터와, 상기제 2 생체신호를상기제 2 생체신호에대응되는파지력정보로변환시킬수있는변환행렬을상기분류자세별로저장하여포함하고있는자세정보저장부와, 상기제 1 시너지벡터와
 (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) B25J 9/16 (2006.01) B25J 13/08 (2006.01) (21) 출원번호 10-2014-0184773 (22) 출원일자 2014 년 12 월 19 일 심사청구일자 전체청구항수 : 총 7 항 2014 년 12 월 19 일 (54) 발명의명칭파지자세및파지력을추정하는장치
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) B25J 9/16 (2006.01) B25J 13/08 (2006.01) (21) 출원번호 10-2014-0184773 (22) 출원일자 2014 년 12 월 19 일 심사청구일자 전체청구항수 : 총 7 항 2014 년 12 월 19 일 (54) 발명의명칭파지자세및파지력을추정하는장치
특허청구의범위청구항 1 선박의안티재머 (Anti-Jammer) 위성항법시스템으로서, GPS 신호및 DGPS 신호를자함의 INS(Intertial Navigation System) 신호와비교하여기준오차범위초과시수신되는 GPS 신호와 DGPS 신호를재밍 (Jamming)
 위성항법시스템으로서, GPS 신호및 DGPS 신호를자함의 INS(Intertial Navigation System) 신호와비교하여기준오차범위초과시수신되는 GPS 신호와 DGPS 신호를재밍 (Jamming)") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2014-0044048 (43) 공개일자 2014년04월14일 (51) 국제특허분류 (Int. Cl.) G01S 19/07 (2010.01) (21) 출원번호 10-2012-0109967 (22) 출원일자 2012 년 10 월 04 일 심사청구일자 없음 전체청구항수 : 총 4
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2014-0044048 (43) 공개일자 2014년04월14일 (51) 국제특허분류 (Int. Cl.) G01S 19/07 (2010.01) (21) 출원번호 10-2012-0109967 (22) 출원일자 2012 년 10 월 04 일 심사청구일자 없음 전체청구항수 : 총 4
04 Çмú_±â¼ú±â»ç
 42 s p x f p (x) f (x) VOL. 46 NO. 12 2013. 12 43 p j (x) r j n c f max f min v max, j j c j (x) j f (x) v j (x) f (x) v(x) f d (x) f (x) f (x) v(x) v(x) r f 44 r f X(x) Y (x) (x, y) (x, y) f (x, y) VOL.
42 s p x f p (x) f (x) VOL. 46 NO. 12 2013. 12 43 p j (x) r j n c f max f min v max, j j c j (x) j f (x) v j (x) f (x) v(x) f d (x) f (x) f (x) v(x) v(x) r f 44 r f X(x) Y (x) (x, y) (x, y) f (x, y) VOL.
<30325FBCF6C7D05FB9AEC7D7C1F62E687770>
 고1 2015학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 1. 두복소수, 에대하여 의값은? ( 단, ) [2 점 ] 1 2 3 4 5 3. 좌표평면위의두점 P, Q 사이의거리는? [2 점 ] 1 2 3 4 5 2. 두다항식, 에대하여 를간단히하면? [2점] 4. 에서이차함수 의최댓값을, 최솟값을 이라할때, 의값은? [3점] 1
고1 2015학년도 9월고수학 1 전국연합학력평가영역문제지 1 1 제 2 교시 수학영역 1. 두복소수, 에대하여 의값은? ( 단, ) [2 점 ] 1 2 3 4 5 3. 좌표평면위의두점 P, Q 사이의거리는? [2 점 ] 1 2 3 4 5 2. 두다항식, 에대하여 를간단히하면? [2점] 4. 에서이차함수 의최댓값을, 최솟값을 이라할때, 의값은? [3점] 1
특허청구의범위청구항 1 네트워크를통해외부음악메타데이터제공자로부터음악메타데이터가수신되면상기음악메타데이터를임시음악메타데이터에저장하는단계와, 상기임시저장되는음악메타데이터를파싱처리하여메타데이터요소를분리하는단계와, 상기파싱처리된음악메타데이터중주요필드정보를전처리정제하는단계와, 상
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년10월15일 (11) 등록번호 10-1449482 (24) 등록일자 2014년10월02일 (51) 국제특허분류 (Int. Cl.) G06Q 50/10 (2012.01) H04N 21/233 (2011.01) (21) 출원번호 10-2007-0117576 (22) 출원일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년10월15일 (11) 등록번호 10-1449482 (24) 등록일자 2014년10월02일 (51) 국제특허분류 (Int. Cl.) G06Q 50/10 (2012.01) H04N 21/233 (2011.01) (21) 출원번호 10-2007-0117576 (22) 출원일자
스무살, 마음껏날아오르기위해, 일년만꾹참자! 2014학년도대학수학능력시험 9월모의평가 18번두이차정사각행렬 가 를만족시킬때, 옳은것만을 < 보기 > 에서있는대로고른것은? ( 단, 는단위행렬이다.) [4점] < 보기 > ㄱ. ㄴ. ㄷ. 2013학년도대학수학능력시험 16번
![스무살, 마음껏날아오르기위해, 일년만꾹참자! 2014학년도대학수학능력시험 9월모의평가 18번두이차정사각행렬 가 를만족시킬때, 옳은것만을 < 보기 > 에서있는대로고른것은? ( 단, 는단위행렬이다.) [4점] < 보기 > ㄱ. ㄴ. ㄷ. 2013학년도대학수학능력시험 16번](/thumbs/93/112338660.jpg "스무살, 마음껏날아오르기위해, 일년만꾹참자! 2014학년도대학수학능력시험 9월모의평가 18번두이차정사각행렬 가 를만족시킬때, 옳은것만을 < 보기 > 에서있는대로고른것은? ( 단, 는단위행렬이다.) [4점] < 보기 > ㄱ. ㄴ. ㄷ. 2013학년도대학수학능력시험 16번") 친절한하영쌤의 수학 A형 약점체크집중공략오답률 Best 5 정복 하기! - 보충문제 행렬 2015학년도대학수학능력시험 9월모의평가 19번두이차정사각행렬 가 를만족시킬때, < 보기 > 에서옳은것만을있는대로고른것은? ( 단, 는단위행렬이고, 는영행렬이다.) [4점] < 보기 > ㄱ. 의역행렬이존재한다. ㄴ. ㄷ. 2015학년도대학수학능력시험 6월모의평가 19번두이차정사각행렬
친절한하영쌤의 수학 A형 약점체크집중공략오답률 Best 5 정복 하기! - 보충문제 행렬 2015학년도대학수학능력시험 9월모의평가 19번두이차정사각행렬 가 를만족시킬때, < 보기 > 에서옳은것만을있는대로고른것은? ( 단, 는단위행렬이고, 는영행렬이다.) [4점] < 보기 > ㄱ. 의역행렬이존재한다. ㄴ. ㄷ. 2015학년도대학수학능력시험 6월모의평가 19번두이차정사각행렬
BS-K1217-M□□-3012_ProductGuide_KR_PDF
 READER/WRITER MADE IN JAPAN System [ASLINK ] S-K1217-M-3012..,.,....,,. S-K1217-M08-3012 S-K1217-M12-3012 S-K1217-M18-3012 S-K1217-M30-3012 2() () / 1 2 1 DC..,,.,,,..,....... ' ARW-04 (Ver.04-1.01 ),
READER/WRITER MADE IN JAPAN System [ASLINK ] S-K1217-M-3012..,.,....,,. S-K1217-M08-3012 S-K1217-M12-3012 S-K1217-M18-3012 S-K1217-M30-3012 2() () / 1 2 1 DC..,,.,,,..,....... ' ARW-04 (Ver.04-1.01 ),
SH100_V1.4
 User Manual VLUU SH100 1 2 3 4 5 6 m m 7 8 9 10 11 12 13 15 16 17 x y 18 19 1 4 z x 20 2 o 5 o 6 3 7 10 11 21 8 12 o 9 o 22 1 m 2 3 2 1 3 23 24 o 25 1 2 o 1 2 3 26 1 2 1 2 27 1 28 2 1 3 29 2 4 30 1 m
User Manual VLUU SH100 1 2 3 4 5 6 m m 7 8 9 10 11 12 13 15 16 17 x y 18 19 1 4 z x 20 2 o 5 o 6 3 7 10 11 21 8 12 o 9 o 22 1 m 2 3 2 1 3 23 24 o 25 1 2 o 1 2 3 26 1 2 1 2 27 1 28 2 1 3 29 2 4 30 1 m
01이국세_ok.hwp
 x264 GPU 3 a), a), a) Fast Stereoscopic 3D Broadcasting System using x264 and GPU Jung-Ah Choi a), In-Yong Shin a), and Yo-Sung Ho a) 3 2. 2 3. H.264/AVC x264. GPU(Graphics Processing Unit) CUDA API, GPU
x264 GPU 3 a), a), a) Fast Stereoscopic 3D Broadcasting System using x264 and GPU Jung-Ah Choi a), In-Yong Shin a), and Yo-Sung Ho a) 3 2. 2 3. H.264/AVC x264. GPU(Graphics Processing Unit) CUDA API, GPU
(72) 발명자경진호대전유성구지족동열매마을아파트 박찬훈대전서구둔산동크로바아파트 101동 201호 박동일 대전유성구지족동열매마을아파트 101 동 1401 호 이발명을지원한국가연구개발사업 과제고유번호 MO1940 부처명 지식경제부 연구사업명 지경부-국가연구
 발명자경진호대전유성구지족동열매마을아파트 박찬훈대전서구둔산동크로바아파트 101동 201호 박동일 대전유성구지족동열매마을아파트 101 동 1401 호 이발명을지원한국가연구개발사업 과제고유번호 MO1940 부처명 지식경제부 연구사업명 지경부-국가연구") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B25J 13/08 (2006.01) B25J 9/16 (2006.01) B25J 15/00 (2006.01) (21) 출원번호 10-2012-0028017 (22) 출원일자 2012 년 03 월 20 일 심사청구일자 (56) 선행기술조사문헌 JP2002264059
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B25J 13/08 (2006.01) B25J 9/16 (2006.01) B25J 15/00 (2006.01) (21) 출원번호 10-2012-0028017 (22) 출원일자 2012 년 03 월 20 일 심사청구일자 (56) 선행기술조사문헌 JP2002264059
PowerPoint Template
 16-1. 보조자료템플릿 (Template) 함수템플릿 클래스템플릿 Jong Hyuk Park 함수템플릿 Jong Hyuk Park 함수템플릿소개 함수템플릿 한번의함수정의로서로다른자료형에대해적용하는함수 예 int abs(int n) return n < 0? -n : n; double abs(double n) 함수 return n < 0? -n : n; //
16-1. 보조자료템플릿 (Template) 함수템플릿 클래스템플릿 Jong Hyuk Park 함수템플릿 Jong Hyuk Park 함수템플릿소개 함수템플릿 한번의함수정의로서로다른자료형에대해적용하는함수 예 int abs(int n) return n < 0? -n : n; double abs(double n) 함수 return n < 0? -n : n; //
ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9
![ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9](/thumbs/40/22040462.jpg "ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9") 오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
PowerPoint 프레젠테이션
 3 장 화소점ㅎㅎ처리 화소점처리의개념 디지털영상의산술연산과논리연산 디지털영상의다양한화소점처리기법 4 장. 화소점처리 학습목표 화소점처리의개념을알아본다. 디지털영상의화소에서산술연산과그효과를알아본다. 디지털영상에서논리연산과그효과를알아본다. 다양한영상의화소점처리기법을익힌다. 2 Section 01 화소점처리의개념 화소점처리 원화소의값이나위치를바탕으로단일화소값을변경하는기술다른화소의영향을받지않고단순히화소점의값만변경하므로포인트처리
3 장 화소점ㅎㅎ처리 화소점처리의개념 디지털영상의산술연산과논리연산 디지털영상의다양한화소점처리기법 4 장. 화소점처리 학습목표 화소점처리의개념을알아본다. 디지털영상의화소에서산술연산과그효과를알아본다. 디지털영상에서논리연산과그효과를알아본다. 다양한영상의화소점처리기법을익힌다. 2 Section 01 화소점처리의개념 화소점처리 원화소의값이나위치를바탕으로단일화소값을변경하는기술다른화소의영향을받지않고단순히화소점의값만변경하므로포인트처리
이발명을지원한국가연구개발사업 과제고유번호 NRF-2012R1A1A4A 부처명 교육과학기술부 연구관리전문기관 한국연구재단 연구사업명 지역대학우수과학자지원사업 연구과제명 저주파신호와바이스태틱레이다를동시에이용한스텔스형표적의인식에관한연구 기여율 1/1 주관기관
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년11월12일 (11) 등록번호 10-1460591 (24) 등록일자 2014년11월05일 (51) 국제특허분류 (Int. Cl.) G01S 13/44 (2006.01) G01S 13/02 (2006.01) (21) 출원번호 10-2013-0049810 (22) 출원일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년11월12일 (11) 등록번호 10-1460591 (24) 등록일자 2014년11월05일 (51) 국제특허분류 (Int. Cl.) G01S 13/44 (2006.01) G01S 13/02 (2006.01) (21) 출원번호 10-2013-0049810 (22) 출원일자
특허청구의 범위 청구항 1 제1 내지 제6 암이 각각의 관절부를 가지며 형성되며, 상기 제1 내지 제6 암 각각은 제1 내지 제6 링크에 의해 링크되고, 상기 제1 내지 제6 암 내부에는 각각의 암을 구동하는 구동모듈이 각각 내장되며, 상기 구동모듈 각각의 선단에는 1
 (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B25J 9/06 (2006.01) B25J 19/02 (2006.01) (21) 출원번호 10-2011-0079361 (22) 출원일자 2011년08월10일 심사청구일자 2011년08월10일 (65) 공개번호 10-2013-0017122 (43) 공개일자 2013년02월20일
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B25J 9/06 (2006.01) B25J 19/02 (2006.01) (21) 출원번호 10-2011-0079361 (22) 출원일자 2011년08월10일 심사청구일자 2011년08월10일 (65) 공개번호 10-2013-0017122 (43) 공개일자 2013년02월20일
ePapyrus PDF Document
 S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications 260 190 46 (W ) 1024 x 768 (4:3) 400 cd 4선압력방식 1.5Kg 245 x 184 (1T~5T 가능 ) Intel eleron J1900 Quard ore 2z Intel VL887 O, O 250 ~ 1T, 40 ~ SS 옵션가능
S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications 260 190 46 (W ) 1024 x 768 (4:3) 400 cd 4선압력방식 1.5Kg 245 x 184 (1T~5T 가능 ) Intel eleron J1900 Quard ore 2z Intel VL887 O, O 250 ~ 1T, 40 ~ SS 옵션가능
의변화를구동하는스텝모터 ; 상기 2D 레이저스캐너와연결되어상기 2D 레이저스캐너및상기스텝모터를제어하고, 상기스캔된데이터를클러스터링하여전방물체의패턴데이터를형성하는상기차량내에설치된중앙처리장치를포함한다. 이와같이본발명은보다정밀한차량의전방물체패턴인식시스템및방법을제공하고, 고속
 (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2015-0087585 (43) 공개일자 2015년07월30일 (51) 국제특허분류 (Int. Cl.) G01S 17/93 (2006.01) (21) 출원번호 10-2014-0007732 (22) 출원일자 2014 년 01 월 22 일 심사청구일자 전체청구항수 : 총 8 항
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2015-0087585 (43) 공개일자 2015년07월30일 (51) 국제특허분류 (Int. Cl.) G01S 17/93 (2006.01) (21) 출원번호 10-2014-0007732 (22) 출원일자 2014 년 01 월 22 일 심사청구일자 전체청구항수 : 총 8 항
01
 2019 학년도대학수학능력시험 9 월모의평가문제및정답 2019 학년도대학수학능력시험 9 월모의평가문제지 1 제 2 교시 5 지선다형 1. 두벡터, 모든성분의합은? [2 점 ] 에대하여벡터 의 3. 좌표공간의두점 A, B 에대하여선분 AB 를 로외분하는점의좌표가 일때, 의값은? [2점] 1 2 3 4 5 1 2 3 4 5 2. lim 의값은? [2점] 4. 두사건,
2019 학년도대학수학능력시험 9 월모의평가문제및정답 2019 학년도대학수학능력시험 9 월모의평가문제지 1 제 2 교시 5 지선다형 1. 두벡터, 모든성분의합은? [2 점 ] 에대하여벡터 의 3. 좌표공간의두점 A, B 에대하여선분 AB 를 로외분하는점의좌표가 일때, 의값은? [2점] 1 2 3 4 5 1 2 3 4 5 2. lim 의값은? [2점] 4. 두사건,
REP - CP - 016, N OVEMBER 사진 요약 25 가지 색상 Surf 를 이용한 사진 요약과 사진 배치 알고리즘 Photo Summarization - Representative Photo Selection based on 25 Color Hi
 1 사진 요약 25 가지 색상 Surf 를 이용한 사진 요약과 사진 배치 알고리즘 Photo Summarization - Representative Photo Selection based on 25 Color Histogram and ROI Extraction using SURF 류동성 Ryu Dong-Sung 부산대학교 그래픽스 연구실 dsryu99@pusan.ac.kr
1 사진 요약 25 가지 색상 Surf 를 이용한 사진 요약과 사진 배치 알고리즘 Photo Summarization - Representative Photo Selection based on 25 Color Histogram and ROI Extraction using SURF 류동성 Ryu Dong-Sung 부산대학교 그래픽스 연구실 dsryu99@pusan.ac.kr
특허청구의범위청구항 1 영상제공서버에서의실시간으로영상을제공하는방법에있어서, 클라이언트로부터매장의종류를포함하는검색어를수신하는단계 ; 수신된검색어에기초하여특정지역내에서상기매장의종류에해당하는적어도하나의매장을검색하고검색결과를상기클라이언트에전송하는단계 ; 상기클라이언트로부터발생
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0075000 (22) 출원일자 2008 년 07 월 31 일 심사청구일자 2008 년 07 월 31 일 (65) 공개번호 10-2010-0013469 (43) 공개일자 2010 년 02 월 10 일 (56)
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0075000 (22) 출원일자 2008 년 07 월 31 일 심사청구일자 2008 년 07 월 31 일 (65) 공개번호 10-2010-0013469 (43) 공개일자 2010 년 02 월 10 일 (56)
Chap 6: Graphs
 5. 작업네트워크 (Activity Networks) 작업 (Activity) 부분프로젝트 (divide and conquer) 각각의작업들이완료되어야전체프로젝트가성공적으로완료 두가지종류의네트워크 Activity on Vertex (AOV) Networks Activity on Edge (AOE) Networks 6 장. 그래프 (Page 1) 5.1 AOV
5. 작업네트워크 (Activity Networks) 작업 (Activity) 부분프로젝트 (divide and conquer) 각각의작업들이완료되어야전체프로젝트가성공적으로완료 두가지종류의네트워크 Activity on Vertex (AOV) Networks Activity on Edge (AOE) Networks 6 장. 그래프 (Page 1) 5.1 AOV
°¡À̵åºÏ 3Â÷-1
 CONTENTS 학교폭력 사안처리 가이드북 학교폭력 이해 정도 자가 점검하기 나는 학교폭력을 어느 정도 이해하는가 학교폭력예방및대책에관한법률 에서 말한 폭력 개념과 학교폭력에 관련된 법률적 개념을 이해해보자. 나는 학교폭력 유형을 어느 정도 알고 있는가 학교 및 청소년 관련 기관에서 일반적으로 많이 사용하는 학교폭력 유형구분을 교사가
CONTENTS 학교폭력 사안처리 가이드북 학교폭력 이해 정도 자가 점검하기 나는 학교폭력을 어느 정도 이해하는가 학교폭력예방및대책에관한법률 에서 말한 폭력 개념과 학교폭력에 관련된 법률적 개념을 이해해보자. 나는 학교폭력 유형을 어느 정도 알고 있는가 학교 및 청소년 관련 기관에서 일반적으로 많이 사용하는 학교폭력 유형구분을 교사가
31. 을전개한식에서 의계수는? 를전개한식이 일 때, 의값은? 을전개했을때, 의계수와상수항의합을구하면? 을전개했을때, 의 계수는? 를전개했을때, 상수항을 구하여라. 37
 21. 다음식의값이유리수가되도록유리수 의값을 정하면? 1 4 2 5 3 26. 을전개하면상수항을 제외한각항의계수의총합이 이다. 이때, 의값은? 1 2 3 4 5 22. 일때, 의값은? 1 2 3 4 5 27. 를전개하여간단히 하였을때, 의계수는? 1 2 3 4 5 23. 를전개하여 간단히하였을때, 상수항은? 1 2 3 4 5 28. 두자연수 와 를 로나누면나머지가각각
21. 다음식의값이유리수가되도록유리수 의값을 정하면? 1 4 2 5 3 26. 을전개하면상수항을 제외한각항의계수의총합이 이다. 이때, 의값은? 1 2 3 4 5 22. 일때, 의값은? 1 2 3 4 5 27. 를전개하여간단히 하였을때, 의계수는? 1 2 3 4 5 23. 를전개하여 간단히하였을때, 상수항은? 1 2 3 4 5 28. 두자연수 와 를 로나누면나머지가각각
<BCF6B8AEBFB5BFAA28B0A1C7FC295FC2A6BCF62E687770>
 제 2 교시 2013 학년도대학수학능력시험문제지 수리영역 ( 가형 ) 1 짝수형 5 지선다형 1. 두행렬, 모든성분의합은? [2 점 ] 에대하여행렬 의 3. 좌표공간에서두점 A, B 에대하여선분 AB 를 로내분하는점의좌표가 이다. 의값은? [2점] 1 2 3 4 5 1 2 3 4 5 2. sin 일때, sin 의값은? ( 단, 이다.) [2 점 ] 1 2 3
제 2 교시 2013 학년도대학수학능력시험문제지 수리영역 ( 가형 ) 1 짝수형 5 지선다형 1. 두행렬, 모든성분의합은? [2 점 ] 에대하여행렬 의 3. 좌표공간에서두점 A, B 에대하여선분 AB 를 로내분하는점의좌표가 이다. 의값은? [2점] 1 2 3 4 5 1 2 3 4 5 2. sin 일때, sin 의값은? ( 단, 이다.) [2 점 ] 1 2 3
<C1DF29BCF6C7D020315FB1B3BBE7BFEB20C1F6B5B5BCAD2E706466>
 84 85 86 87 88 89 1 12 1 1 2 + + + 11=60 9 19 21 + + + 19 17 13 11=60 + 5 7 + 5 + 10 + 8 + 4+ 6 + 3=48 1 2 90 1 13 1 91 2 3 14 1 2 92 4 1 2 15 2 3 4 93 1 5 2 6 1 2 1 16 6 5 94 1 1 22 33 55 1 2 3 4 5 6
84 85 86 87 88 89 1 12 1 1 2 + + + 11=60 9 19 21 + + + 19 17 13 11=60 + 5 7 + 5 + 10 + 8 + 4+ 6 + 3=48 1 2 90 1 13 1 91 2 3 14 1 2 92 4 1 2 15 2 3 4 93 1 5 2 6 1 2 1 16 6 5 94 1 1 22 33 55 1 2 3 4 5 6
영상 처리 프로그래밍 By Visual C++
 디지털영상처리 6 6 장화질향상기법 영상반전하기 밝기와명암비조절 감마보정 히스토그램분석 히스토그램균등화 6.1. 영상반전하기 영상반전 영상내의모든픽셀값을하나하나반전시키는것 g( x, y) 255 f ( x, y) 255 f ( x, y) g( x, y) : 입력영상 : 출력영상 출력그레이스케일값 255 - k 0 k 255 입력그레이스케일값 - 2 - 6.1.
디지털영상처리 6 6 장화질향상기법 영상반전하기 밝기와명암비조절 감마보정 히스토그램분석 히스토그램균등화 6.1. 영상반전하기 영상반전 영상내의모든픽셀값을하나하나반전시키는것 g( x, y) 255 f ( x, y) 255 f ( x, y) g( x, y) : 입력영상 : 출력영상 출력그레이스케일값 255 - k 0 k 255 입력그레이스케일값 - 2 - 6.1.
명세서청구범위청구항 1 갠트리의헤드로부터방사선을조사하는선형가속기에사용되고, 상기헤드에설치되고, 방사선이조사되는환자의치료중심을향해레이저를쏘고환자의체표면에서반사된레이저를감지하여환자의체표면까지의거리를측정하는레이저거리측정기 ; 상기레이저거리측정기의데이터를수신하여 SSD(sou
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) A61N 5/10 (2006.01) (21) 출원번호 10-2014-0107105 (22) 출원일자 2014 년 08 월 18 일 심사청구일자 (56) 선행기술조사문헌 JP2012024909 A* JP2012501792 A* US20100280374 A1
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) A61N 5/10 (2006.01) (21) 출원번호 10-2014-0107105 (22) 출원일자 2014 년 08 월 18 일 심사청구일자 (56) 선행기술조사문헌 JP2012024909 A* JP2012501792 A* US20100280374 A1
특허청구의 범위 청구항 1 맨홀 일부분에 관통되게 결합되는 맨홀결합구와; 상기 맨홀결합구의 전방에 연통되게 형성되어 토양속에 묻히게 설치되고, 외주면에는 지하수가 유입될 수 있는 다수의 통공이 관통 형성된 지하수유입구와; 상기 맨홀결합구의 후방에 연통되고 수직으로 세워
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) G01F 23/02 (2006.01) G01F 23/00 (2006.01) (21) 출원번호 10-2007-0096769 (22) 출원일자 2007년09월21일 심사청구일자 전체 청구항 수 : 총 5 항 (54) 지하수위 관측장치 2007년09월21일 (11) 공개번호 10-2009-0031004
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) G01F 23/02 (2006.01) G01F 23/00 (2006.01) (21) 출원번호 10-2007-0096769 (22) 출원일자 2007년09월21일 심사청구일자 전체 청구항 수 : 총 5 항 (54) 지하수위 관측장치 2007년09월21일 (11) 공개번호 10-2009-0031004
<3036C3D6BFB5C8AF2E687770>
 ISSN 1598-0170 (Print) ISSN 2287-1136 (Online) http://www.jksii.or.kr 안드로이드기반의도로밝기측정어플리케이션구현 A Road Luminance Measurement Application based on Android 최영환 1 김홍래 2 홍민 3* Young-Hwan Choi Hongrae Kim Min
ISSN 1598-0170 (Print) ISSN 2287-1136 (Online) http://www.jksii.or.kr 안드로이드기반의도로밝기측정어플리케이션구현 A Road Luminance Measurement Application based on Android 최영환 1 김홍래 2 홍민 3* Young-Hwan Choi Hongrae Kim Min
(72) 발명자 배홍민 울산광역시 동구 전하로 34 (전하동) 윤규상 울산광역시 동구 문현6길 19, 102동 304호 ( 방어동, 문현아이파크) 배대원 울산광역시 남구 월평로 253, 101동 409호 ( 삼산동, 삼산현대아파트) - 2 -
 발명자 배홍민 울산광역시 동구 전하로 34 (전하동) 윤규상 울산광역시 동구 문현6길 19, 102동 304호 ( 방어동, 문현아이파크) 배대원 울산광역시 남구 월평로 253, 101동 409호 ( 삼산동, 삼산현대아파트) - 2 -") (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2013-0082991 (43) 공개일자 2013년07월22일 (51) 국제특허분류(Int. Cl.) G06Q 10/06 (2012.01) (21) 출원번호 10-2011-0142753 (22) 출원일자 2011년12월26일 심사청구일자 없음 전체 청구항 수 : 총 1 항 (54)
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2013-0082991 (43) 공개일자 2013년07월22일 (51) 국제특허분류(Int. Cl.) G06Q 10/06 (2012.01) (21) 출원번호 10-2011-0142753 (22) 출원일자 2011년12월26일 심사청구일자 없음 전체 청구항 수 : 총 1 항 (54)
H3250_Wi-Fi_E.book
 무선 LAN 기능으로 할 수 있는 것 2 무선 LAN 기능으로 할 수 있는 것 z q l D w 3 Wi-Fi 기능 플로우차트 z q l D 4 Wi-Fi 기능 플로우차트 w 5 본 사용 설명서의 기호 설명 6 각 장별 목차 1 2 3 4 5 6 7 8 9 10 11 12 13 14 7 목차 1 2 3 4 8 목차 5 6 7 8 9 9 목차 10 11 12
무선 LAN 기능으로 할 수 있는 것 2 무선 LAN 기능으로 할 수 있는 것 z q l D w 3 Wi-Fi 기능 플로우차트 z q l D 4 Wi-Fi 기능 플로우차트 w 5 본 사용 설명서의 기호 설명 6 각 장별 목차 1 2 3 4 5 6 7 8 9 10 11 12 13 14 7 목차 1 2 3 4 8 목차 5 6 7 8 9 9 목차 10 11 12
특허청구의 범위 청구항 1 지그비 통신 망에서 지그비 노드들의 우선 순위를 부여하는 방법에 있어서, (a) 상기 지그비 노드들 각각의 CCA 수행 시간들을 전송할 데이터의 우선 순위에 따라 가변시키는 단계와; (b) 상기 가변되는 CCA 수행 시간들은 우선 순위가 높은
 상기 지그비 노드들 각각의 CCA 수행 시간들을 전송할 데이터의 우선 순위에 따라 가변시키는 단계와; (b) 상기 가변되는 CCA 수행 시간들은 우선 순위가 높은") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H04W 84/18 (2009.01) H04W 74/08 (2009.01) (21) 출원번호 10-2011-0040204 (22) 출원일자 2011년04월28일 심사청구일자 2011년04월28일 (65) 공개번호 10-2012-0122182 (43) 공개일자 2012년11월07일
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H04W 84/18 (2009.01) H04W 74/08 (2009.01) (21) 출원번호 10-2011-0040204 (22) 출원일자 2011년04월28일 심사청구일자 2011년04월28일 (65) 공개번호 10-2012-0122182 (43) 공개일자 2012년11월07일
ePapyrus PDF Document
 S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications ooling System 260 190 46 (W ) 1024 x 768 (4:3) L 400 cd 4선압력방식 1.5Kg ase an(50 50) onector X 2 VS 고정방식, 매립브라켓고정방식 245 x 184 (1T~5T 가능 ) 12V/5 dapter
S104PP (10.4 인치일체형페널 P) S104PP chassis, L Specifications ooling System 260 190 46 (W ) 1024 x 768 (4:3) L 400 cd 4선압력방식 1.5Kg ase an(50 50) onector X 2 VS 고정방식, 매립브라켓고정방식 245 x 184 (1T~5T 가능 ) 12V/5 dapter
(72) 발명자 김현석 인천광역시남구관교동신비마을아파트 110 동 차홍파 중국길림성연길시공원가원춘위 7 조, 연변대학교 19 빌딩 4 단원 1 층서 김영환 경상북도포항시남구효자동산 31 번지포항공과대학교전자전기공학과 배태일 경상북도포항시남구
 발명자 김현석 인천광역시남구관교동신비마을아파트 110 동 차홍파 중국길림성연길시공원가원춘위 7 조, 연변대학교 19 빌딩 4 단원 1 층서 김영환 경상북도포항시남구효자동산 31 번지포항공과대학교전자전기공학과 배태일 경상북도포항시남구") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G06F 17/50 (2006.01) H01L 21/00 (2006.01) (21) 출원번호 10-2008-0129152 (22) 출원일자 2008 년 12 월 18 일 심사청구일자 2008 년 12 월 18 일 (65) 공개번호 10-2010-0070560 (43) 공개일자
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G06F 17/50 (2006.01) H01L 21/00 (2006.01) (21) 출원번호 10-2008-0129152 (22) 출원일자 2008 년 12 월 18 일 심사청구일자 2008 년 12 월 18 일 (65) 공개번호 10-2010-0070560 (43) 공개일자
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
(72) 발명자 이대훈 경기도 성남시 분당구 정자동 파크뷰 611동 901호 박준호 경기도 안산시 상록구 사1동 1323-14 - 2 -
 발명자 이대훈 경기도 성남시 분당구 정자동 파크뷰 611동 901호 박준호 경기도 안산시 상록구 사1동 1323-14 - 2 -") (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G01N 3/30 (2006.01) (21) 출원번호 10-2008-0090352 (22) 출원일자 2008년09월12일 심사청구일자 2008년09월12일 (65) 공개번호 10-2010-0031318 (43) 공개일자 2010년03월22일 (56) 선행기술조사문헌 KR200430499
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G01N 3/30 (2006.01) (21) 출원번호 10-2008-0090352 (22) 출원일자 2008년09월12일 심사청구일자 2008년09월12일 (65) 공개번호 10-2010-0031318 (43) 공개일자 2010년03월22일 (56) 선행기술조사문헌 KR200430499
<B4EBC7D0BCF6C7D02DBBEFB0A2C7D4BCF62E687770>
 삼각함수. 삼각함수의덧셈정리 삼각함수의덧셈정리 삼각함수 sin (α + β ), cos (α + β ), tan (α + β ) 등을 α 또는 β 의삼각함수로나 타낼수있다. 각 α 와각 β 에대하여 α >0, β >0이고 0 α - β < β 를만족한다고가정하 자. 다른경우에도같은방법으로증명할수있다. 각 α 와각 β 에대하여 θ = α - β 라고놓자. 위의그림에서원점에서거리가
삼각함수. 삼각함수의덧셈정리 삼각함수의덧셈정리 삼각함수 sin (α + β ), cos (α + β ), tan (α + β ) 등을 α 또는 β 의삼각함수로나 타낼수있다. 각 α 와각 β 에대하여 α >0, β >0이고 0 α - β < β 를만족한다고가정하 자. 다른경우에도같은방법으로증명할수있다. 각 α 와각 β 에대하여 θ = α - β 라고놓자. 위의그림에서원점에서거리가