이발명을지원한국가연구개발사업 과제고유번호 PA 부처명 서울특별시 연구사업명 2010년도서울시산학연협력사업특허기술상품화기술개발지원사업 연구과제명 3D 입체전방위 (Omni-directional) 카메라시스템개발 주관기관 서울시립대학교 연구기간
|
|
|
- 길수 교
- 6 years ago
- Views:
Transcription
1 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 17/00 ( ) G01C 11/00 ( ) (21) 출원번호 (22) 출원일자 2011 년 05 월 31 일 심사청구일자 2011 년 05 월 31 일 (65) 공개번호 (43) 공개일자 2011 년 12 월 07 일 (30) 우선권주장 년 05 월 31 일대한민국 (KR) (56) 선행기술조사문헌 JP A (45) 공고일자 2013년04월01일 (11) 등록번호 (24) 등록일자 2013년03월26일 (73) 특허권자 서울시립대학교산학협력단 서울특별시동대문구서울시립대로 163 ( 전농동, 서울시립대학교 ) (72) 발명자 이임평 서울특별시동대문구서울시립대로 163, 21 세기관 602 호 ( 전농동, 서울시립대학교 ) 오태완 서울특별시동대문구서울시립대로 163, 21 세기관 602 호 ( 전농동, 서울시립대학교 ) 최경아 서울특별시동대문구서울시립대로 163, 21 세기관 602 호 ( 전농동, 서울시립대학교 ) (74) 대리인 특허법인우인전체청구항수 : 총 14 항심사관 : 문남두 (54) 발명의명칭전방위영상광속조정장치및방법 (57) 요약 본발명은전방위카메라와 GPS/INS 가통합된지상모바일매핑시스템을통해획득된전방위영상과초기외부표정요소를이용하여공액점을통한지상값및외부표정요소를광속조정법을이용하여추정한다. 본발명은전방위영상의공액점좌표와전방위카메라의외부표정요소를입력값으로갖고외부표정요소및지상점좌표의조정계산된값을출력값으로하며, 새로운관측방정식수립, 확률제한조건식수립, 외부표정요소와지상점추정등 3 단계로구성된다. 본발명은연속된전방위카메라영상을이용하여지상점과외부표정요소를수월하게추정할수있으며, 지상점좌표의정확도를향상시킬수있다. 대표도 - 도 1-1 -
2 이발명을지원한국가연구개발사업 과제고유번호 PA 부처명 서울특별시 연구사업명 2010년도서울시산학연협력사업특허기술상품화기술개발지원사업 연구과제명 3D 입체전방위 (Omni-directional) 카메라시스템개발 주관기관 서울시립대학교 연구기간 ~
3 특허청구의범위청구항 1 연속되는전방위영상들중에서선택된공액점에대하여공선조건식을이용하여관측방정식모델을정립하는관측방정식모델정립부 ; 상기관측방정식모델에미리정해진제약조건을부가하여제약조건식모델들을생성하는제약조건식모델생성부 ; 및생성된제약조건식모델들과정립된관측방정식모델을이용하여상기전방위영상을광속조정 (bundle adjustment) 하는광속조정부를포함하는것을특징으로하는전방위영상광속조정장치. 청구항 2 제 1 항에있어서, 상기광속조정부는상기광속조정을통해상기전방위영상과관련된것으로서객체의 3차원모델을추출하기위한지상점과외부표정요소를추정하는것을특징으로하는전방위영상광속조정장치. 청구항 3 제 1 항에있어서, 상기제약조건식모델생성부는상기제약조건으로미리저장된외부표정요소와지상좌표계상에위치하는지상기준점을이용하는것을특징으로하는전방위영상광속조정장치. 청구항 4 제 3 항에있어서, 위성항법장치 (GPS) 또는관성항법장치 (INS) 를이용하여상기외부표정요소로상기전방위영상을획득하는전방위영상획득장치의위치정보와자세정보를획득하는위치 / 자세정보획득부 ; 및상기위성항법장치또는광파기를이용하여상기지상기준점을획득하는지상기준점획득부 ; 를포함하고, 상기위치 / 자세정보획득부는, 상기전방위영상을획득하는전방위영상획득부를포함하는것을특징으로하는전방위영상광속조정장치. 청구항 5 제 1 항에있어서, 상기관측방정식모델정립부는상기전방위영상과관련된영상좌표계의영상점좌표, 지상좌표계상에위치하는지상점좌표, 상기영상좌표계상에위치하는것으로서지상점에대응하는영상점을측정할때에발생되는측정오차, 및상기지상좌표계와상기영상좌표계간좌표변환계수를이용하여상기관측방정식모델을정립하는것을특징으로하는전방위영상광속조정장치. 청구항 6 제 5 항에있어서, 상기관측방정식모델정립부는, 테일러급수를이용하여상기영상점좌표, 상기지상점좌표, 상기측정오차, 및상기좌표변환계수에의한연산식을선형화시키는선형화부 ; 선형화된연산식을야코비행렬형태로치환시키는치환부 ; - 3 -
4 치환된연산식을미리정해진각성분에대하여미분시키는미분부 ; 및상기지상좌표계와상기영상좌표계간변환을위한회전행렬로서상기전방위영상각축의회전각에의한상기회전행렬을이용하여상기미분부에의해미분된연산식들로상기관측방정식모델을정립하는정립부를포함하는것을특징으로하는전방위영상광속조정장치. 청구항 7 제 2 항에있어서, 상기관측방정식모델정립부는상기전방위영상의공액점좌표를입력될상기관측데이터로하고상기지상점과상기외부표정요소를출력될미지변수로하는관측방정식모델을정립하는것을특징으로하는전방위영상광속조정장치. 청구항 8 연속되는전방위영상들중에서선택된공액점에대하여공선조건식을이용하여관측방정식모델을정립하는관측방정식모델정립단계 ; 상기관측방정식모델에미리정해진제약조건을부가하여제약조건식모델들을생성하는제약조건식모델생성단계 ; 및생성된제약조건식모델들과정립된관측방정식모델을이용하여상기전방위영상을광속조정 (bundle adjustment) 하는광속조정단계를포함하는것을특징으로하는전방위영상광속조정방법. 청구항 9 제 8 항에있어서, 상기광속조정단계는상기광속조정을통해상기전방위영상과관련된것으로서객체의 3차원모델을추출하기위한지상점과외부표정요소를추정하는것을특징으로하는전방위영상광속조정방법. 청구항 10 제 8 항에있어서, 상기제약조건식모델생성단계는상기제약조건으로미리저장된외부표정요소와지상좌표계상에위치하는지상기준점을이용하는것을특징으로하는전방위영상광속조정방법. 청구항 11 제 10 항에있어서, 위성항법장치 (GPS) 또는관성항법장치 (INS) 를이용하여상기외부표정요소로상기전방위영상을획득하는전방위영상획득장치의위치정보와자세정보를획득하는위치 / 자세정보획득단계 ; 상기위성항법장치또는광파기를이용하여상기지상기준점을획득하는지상기준점획득단계 ; 및지상사진측량시스템 (MMS) 을이용하여관측데이터를획득하는관측데이터획득단계를더욱더포함하는것을특징으로하는전방위영상광속조정방법. 청구항 12 제 8 항에있어서, 상기관측방정식모델정립단계는상기전방위영상과관련된영상좌표계의영상점좌표, 지상좌표계상에위치하는지상점좌표, 상기영상좌표계상에위치하는것으로서지상점에대응하는영상점을측정할때에발생되는측정오차, 및상기지상좌표계와상기영상좌표계간좌표변환계수를이용하여상기관측방정식모델을정립하는것을특징으로하는전방위영상광속조정방법
5 청구항 13 제 12 항에있어서, 상기관측방정식모델정립단계는, 테일러급수를이용하여상기영상점좌표, 상기지상점좌표, 상기측정오차, 및상기좌표변환계수에의한연산식을선형화시키는선형화단계 ; 선형화된연산식을야코비행렬형태로치환시키는치환단계 ; 치환된연산식을미리정해진각성분에대하여미분시키는미분단계 ; 및상기지상좌표계와상기영상좌표계간변환을위한회전행렬로서상기전방위영상각축의회전각에의한상기회전행렬을이용하여상기미분단계에의해미분된연산식들로상기관측방정식모델을정립하는정립단계를포함하는것을특징으로하는전방위영상광속조정방법. 청구항 14 제 9 항에있어서, 상기관측방정식모델정립단계는상기전방위영상의공액점좌표를입력될상기관측데이터로하고상기지상점과상기외부표정요소를출력될미지변수로하는관측방정식모델을정립하는것을특징으로하는전방위영상광속조정방법. 명세서 [0001] 기술분야 본발명은전방위영상으로부터절대좌표를결정하는장치및방법에관한것이다. 보다상세하게는, 광속조 정을통해전방위영상으로부터절대좌표를결정하는장치및방법에관한것이다. [0002] [0003] [0004] 배경기술최근에는모바일매핑시스템 (MMS; Mobile Mapping System) 에전방위카메라 (omni-directional camera) 를탑재하여공간정보를획득하려는시도가활발하게이루어지고있다. 전방위카메라란시야각 (FOV; Filed Of View) 이 360 이기때문에촬영지점을기준으로모든방향의영상정보취득이가능한카메라를말한다. 종래기술의한가지예로서, 전방위카메라영상을통해 3차원절대좌표를결정하는기술이있다. 이기술은전방위카메라를통해 3차원절대좌표결정에대한수식및그가능성에대해서언급하고있다. 이기술은기존의프레임카메라를사용하는방식에비해기선이길어져높은정확도를갖는결과물을생성하는것이가능하다. 그러나, 이기술은광속조정법에비해절대좌표값의정확도가떨어지기때문에디지털영상을이용하는수치사진측량에적합하지않다. 종래기술의다른예로서, 전방위카메라영상을이용하여객체의위치를추적하고탐지하는기술이있다. 이기술은연속된전방위영상을이용하여영상내의객체들을매칭하고이를탐지한다. 그러나, 이기술은공액점을추출하기않기때문에지상좌표계와카메라좌표계간매칭이정확하지않다. 발명의내용 [0005] 해결하려는과제본발명은상기한문제점을해결하기위해안출된것으로서, 전방위카메라와 GPS/INS(Global Positioning System/Inertial Navigation System) 가통합된모바일매핑시스템 (MMS) 을이용하여전방위영상을광속조정하는전방위영상광속조정장치및방법을제안함을목적으로한다. [0006] 과제의해결수단 본발명은상기한목적을달성하기위해안출된것으로서, 연속되는전방위영상들중에서선택된공액점에대 - 5 -
6 하여공선조건식을이용하여관측방정식모델을정립하는관측방정식모델정립부 ; 미리정해진제약조건을반영및미반영하여상기관측방정식모델에부가하여제약조건식모델들을생성하는제약조건식모델생성부 ; 및생성된제약조건식모델들과정립된관측방정식모델을이용하여상기전방위영상을광속조정 (bundle adjustment) 하는광속조정부를포함하는것을특징으로하는전방위영상광속조정장치를제안한다. [0007] [0008] [0009] [0010] [0011] [0012] [0013] 바람직하게는, 상기광속조정부는상기광속조정을통해상기전방위영상과관련된것으로서객체의 3차원모델을추출하기위한지상점과외부표정요소를추정한다. 더욱바람직하게는, 상기관측방정식모델정립부는상기전방위영상의공액점좌표를입력될상기관측데이터로하고상기지상점과상기외부표정요소를출력될미지변수로하는관측방정식모델을정립한다. 바람직하게는, 상기제약조건식모델생성부는상기제약조건으로미리저장된외부표정요소와지상좌표계상에위치하는지상기준점을이용한다. 더욱바람직하게는, 상기전방위영상광속조정장치는위성항법장치 (GPS) 또는관성항법장치 (INS) 를이용하여상기외부표정요소로상기전방위영상을획득하는전방위영상획득장치의위치정보와자세정보를획득하는위치 / 자세정보획득부 ; 또는상기위성항법장치또는광파기를이용하여상기지상기준점을획득하는지상기준점획득부를더욱포함하며, 상기위치 / 자세정보획득부를구비하는것으로서, 상기전방위영상을획득하는전방위영상획득부를더욱더포함할수있다. 바람직하게는, 상기관측방정식모델정립부는상기전방위영상과관련된영상좌표계의영상점좌표, 지상좌표계상에위치하는지상점좌표, 상기영상좌표계상에위치하는것으로서지상점에대응하는영상점을측정할때에발생되는측정오차, 및상기지상좌표계와상기영상좌표계간좌표변환계수를이용하여상기관측방정식모델을정립한다. 더욱바람직하게는, 상기관측방정식모델정립부는, 테일러급수를이용하여상기영상점좌표, 상기지상점좌표, 상기측정오차, 및상기좌표변환계수에의한연산식을선형화시키는선형화부 ; 선형화된연산식을야코비행렬형태로치환시키는치환부 ; 치환된연산식을미리정해진각성분에대하여미분시키는미분부 ; 및상기지상좌표계와상기영상좌표계간변환을위한회전행렬로서상기전방위영상각축의회전각에의한상기회전행렬을이용하여상기미분부에의해미분된연산식들로상기관측방정식모델을정립하는정립부를포함한다. 또한, 본발명은연속되는전방위영상들중에서선택된공액점에대하여공선조건식을이용하여관측방정식모델을정립하는관측방정식모델정립단계 ; 미리정해진제약조건을반영및미반영하여상기관측방정식모델에부가하여제약조건식모델들을생성하는제약조건식모델생성단계 ; 및생성된제약조건식모델들과정립된관측방정식모델을이용하여상기전방위영상을광속조정 (bundle adjustment) 하는광속조정단계를포함하는것을특징으로하는전방위영상광속조정방법을제안한다. 바람직하게는, 상기광속조정단계는상기광속조정을통해상기전방위영상과관련된것으로서객체의 3차원모델을추출하기위한지상점과외부표정요소를추정한다. 더욱바람직하게는, 상기관측방정식모델정립단계는상기전방위영상의공액점좌표를입력될상기관측데이터로하고상기지상점과상기외부표정요소를출력될미지변수로하는관측방정식모델을정립한다. 바람직하게는, 상기제약조건식모델생성단계는상기제약조건으로미리저장된외부표정요소와지상좌표계상에위치하는지상기준점을이용한다. 더욱바람직하게는, 상기전방위영상광속조정방법은위성항법장치 (GPS) 또는관성항법장치 (INS) 를이용하여상기외부표정요소로상기전방위영상을획득하는전방위영상획득장치의위치정보와자세정보를획득하는위치 / 자세정보획득단계 ; 또는상기위성항법장치또는광파기를이용하여상기지상기준점을획득하는지상기준점획득단계를더욱포함하며, 지상사진측량시스템 (MMS) 을이용하여상기관측데이터를획득하는관측데이터획득단계를더욱더포함할수있다. 바람직하게는, 상기관측방정식모델정립단계는상기전방위영상과관련된영상좌표계의영상점좌표, 지상좌표계상에위치하는지상점좌표, 상기영상좌표계상에위치하는것으로서지상점에대응하는영상점을측정할때에발생되는측정오차, 및상기지상좌표계와상기영상좌표계간좌표변환계수를이용하여상기관측방정식모델을정립한다. 더욱바람직하게는, 상기관측방정식모델정립단계는, 테일러급수를이용하여상기영상점좌표, 상기지상점좌표, 상기측정오차, 및상기좌표변환계수에의한연산식을선형화시키는선형화단계 ; 선형화된연산식을야코비행렬형태로치환시키는치환단계 ; 치환된연산식을미리정해진각성분에대하여미분시키는미분단계 ; 및상기지상좌표계와상기영상좌표계간변환을위한회전행렬로서상기전방위영상각축의회전각에의한상기회전행렬을이용하여상기미분단계에의해미분된연산식들로상기관측방정식모델을정립하는정립단계를포함한다
7 [0014] 발명의효과본발명은전방위카메라와 GPS/INS가통합된모바일매핑시스템을이용하여전방위영상을광속조정함으로써다음효과를얻을수있다. 첫째, 전방위영상에적합한공선방정식과이방정식에의한관측방정식을수립함으로써, 연속된전방위카메라영상을이용하여지상점과외부표정요소를수월하게추정할수있다. 둘째, GPS/INS로부터획득된외부표정요소, 정지 GPS, 토탈스테이션등을통해획득된지상기준점을이용하여다양한타입의확률제약조건식을수립검증함으로써, 지상점좌표의정확도를향상시킬수있다. [0015] 도면의간단한설명 도 1 은본발명의바람직한실시예에따른전방위영상광속조정장치의내부구성을개략적으로도시한블록 도이다. 도 2는본발명의바람직한실시예에따른전방위영상광속조정장치의내부구성을세부적으로도시한블록도이다. 도 3은본실시예에따른방법론의개요도이다. 도 4는중심투영원리에의한지상점과영상점간의관계를도시한도면이다. 도 5는본실시예에따른방법론을설명하기위한참고도이다. 도 6 내지도 13은본실시예에대한실험을설명하기위한참고도이다. 도 14는본발명의바람직한실시예에따른전방위영상광속조정방법을설명한흐름도이다. [0016] [0017] [0018] [0019] [0020] 발명을실시하기위한구체적인내용이하, 본발명의바람직한실시예를첨부된도면들을참조하여상세히설명한다. 우선각도면의구성요소들에참조부호를부가함에있어서, 동일한구성요소들에대해서는비록다른도면상에표시되더라도가능한한동일한부호를가지도록하고있음에유의해야한다. 또한, 본발명을설명함에있어, 관련된공지구성또는기능에대한구체적인설명이본발명의요지를흐릴수있다고판단되는경우에는그상세한설명은생략한다. 또한, 이하에서본발명의바람직한실시예를설명할것이나, 본발명의기술적사상은이에한정하거나제한되지않고당업자에의해변형되어다양하게실시될수있음은물론이다. 도 1은본발명의바람직한실시예에따른전방위영상광속조정장치의내부구성을개략적으로도시한블록도이다. 도 2는본발명의바람직한실시예에따른전방위영상광속조정장치의내부구성을세부적으로도시한블록도이다. 이하설명은도 1과도 2를참조한다. 도 1에따르면, 전방위영상광속조정장치 (100) 는관측방정식모델정립부 (110), 제약조건식모델생성부 (120), 광속조정부 (130), 전원부 (140) 및주제어부 (150) 를포함한다. 관측방정식모델정립부 (110) 는연속되는전방위영상들중에서선택된공액점에대하여공선조건식 (collinearity equation) 을이용하여관측방정식모델을정립하는기능을수행한다. 공선조건을기반으로하는관측방정식은두개이상의전방위영상으로부터얻어진공액점의영상좌표값으로세워질수있다. 관측방정식모델정립부 (110) 는전방위영상의공액점좌표를입력될관측데이터로하고지상점과외부표정요소를출력될미지변수로하는관측방정식모델을정립한다. 관측방정식은관측치, 미지수, 그리고관측치와미지수간의수학적모델로구성된다. 관측치는영상좌표계에서획득한영상좌표값과관측오차를의미한다. 미지수는지상좌표계로표현된지상점과카메라의외부표정요소를의미한다. 수학적모델은공선조건과좌표변환으로구성된다. 관측방정식모델은공선방정식, 관측치및관측오차, 미지수등을이용하여구성된다. 공선방정식은좌표변환계수 ( 지상좌표계상의지상점이영상좌표계상의지상점으로 ), 지상점이영상으로투영되는공선조건등으로세워질수있다. 좌표변환계수에는회전변환계수와원점이동변환계수등두가지성분이있다. 이때, 관측방정식모델정립부 (110) 는전방위영상과관련된영상좌표계 ( 카메라좌표계 ) 의영상점좌표, 지상좌표계상에위치하는지상점좌표, 영상좌표계상에위치하는것으로서지상점에대응하는영상점을측정할때에발생되는측정오차, 및지상좌표계와영상좌표계간좌표변환계수를이용하여관측방정식모델을정립한다. 이점을고려할때관측방정식모델정립부 (110) 는도 2의 (b) 에도시된바와같이선형화부 (111), 치환부 (112), 미분부 (113) 및정립부 (114) - 7 -
8 를포함할수있다. [0021] [0022] [0023] [0024] [0025] [0026] [0027] [0028] [0029] [0030] 선형화부 (111) 는테일러급수를이용하여영상점좌표, 지상점좌표, 측정오차, 및좌표변환계수에의한연산식을선형화시키는기능을수행한다. 치환부 (112) 는선형화된연산식을야코비행렬형태로치환시키는기능을수행한다. 미분부 (113) 는치환된연산식을미리정해진각성분에대하여미분시키는기능을수행한다. 미분부 (113) 는미리정해진성분으로미지변수를이용한다. 본실시예에서미지변수에는외부표정요소와지상점좌표가있으며, 특히외부표정요소에는위치요소와자세요소가있다. 정립부 (114) 는지상좌표계와영상좌표계간변환을위한회전행렬로서전방위영상각축의회전각에의한회전행렬을이용하여미분부에의해미분된연산식들로관측방정식모델을정립하는기능을수행한다. 제약조건식모델생성부 (120) 는미리정해진제약조건을반영및미반영하여관측방정식모델에부가하여제약조건식모델들을생성하는기능을수행한다. 제약조건식모델생성부 (120) 는제약조건으로미리저장된외부표정요소와지상좌표계상에위치하는지상기준점을이용할수있다. 이점을고려할때, 전방위영상광속조정장치 (100) 는도 2의 (a) 에도시된바와같이위치 / 자세정보획득부 (210), 지상기준점획득부 (220) 및전방위영상획득부 (230) 중적어도하나의구성부를더욱포함할수있다. 위치 / 자세정보획득부 (210) 는위성항법장치 (GPS) 또는관성항법장치 (INS) 를이용하여외부표정요소로전방위영상을획득하는전방위영상획득장치의위치정보와자세정보를획득하는기능을수행한다. 지상기준점획득부 (220) 는 GPS/INS, 광파기등을이용하여지상기준점을획득하는기능을수행한다. 전방위영상획득부 (230) 는위치 / 자세정보획득부 (210) 를구비하는것으로서, 전방위영상을획득하는기능을수행한다. 광속조정부 (130) 는생성된제약조건식모델들과정립된관측방정식모델을이용하여전방위영상을광속조정 (bundle adjustment) 하는기능을수행한다. 광속조정부 (130) 는광속조정을통해전방위영상과관련된것으로서객체의 3차원모델을추출하기위한지상점과외부표정요소를추정한다. 전원부 (140) 는전방위영상광속조정장치 (100) 를구성하는각부에전원을공급하는기능을수행한다. 주제어부 (150) 는전방위영상광속조정장치 (100) 를구성하는각부의전체작동을제어하는기능을수행한다. 다음으로, 전방위영상광속조정장치 (100) 를일실시예를들어설명한다. 이하실시예에서는전방위카메라와 GPS/INS가통합된지상모바일매핑시스템을통해획득된전방위영상과초기외부표정요소를이용하여공액점을통한지상값및외부표정요소를광속조정법을이용하여추정하는방법론을소개한다. 본실시예에서제안하는방법인전방위영상을이용한광속조정법은전방위영상의공액점좌표와전방위카메라의외부표정요소를입력값으로갖고외부표정요소및지상점좌표의조정계산된값을출력값으로한다. 도 3은전방위영상을이용한본방법론의개요를도시한다. 도 3에서보는바와같이제안된방법은크게새로운관측방정식수립, 확률제한조건식 (stochastic constraint) 수립, 외부표정요소와지상점추정등 3단계로구성되어있다. 첫번째단계는전방위영상에적합한공선조건식을이용하여새로운관측방정식모델을수립하는단계이다. 본실시예에서이단계는도 1의관측방정식모델정립부가수행할수있다. 중심투영원리에의해카메라투영의중심과지상점을잇는직선이카메라투영중심을중심으로갖는구와한점에서만나게되며이를이용하여새로운공선조건식을수립한다. 그리고, 공액점과외부표정요소를관측값으로가지며외부표정요소와지상점좌표를미지수로갖는관측방정식을수립한다. 아래수학식 1은관측방정식을보여주고있다. 이때 Y 는전방위영상상의공액점좌표값이고, 차를의미한다. 는각각외부표정요소와지상점좌표미지수이며, e y 는오 수학식 1 [0031] [0032] 다음단계는지상 MMS 에탑재되어있는 GPS/INS 로부터획득되는카메라의외부표정요소및정지 GPS 와토탈 스테이션을통해획득된지상기준점을제약조건으로갖는확률제약조건 (stochastic constraints) 식을수립 - 8 -
9 한다. 본실시예에서이단계는도 1의제약조건식모델생성부가수행할수있다. 수학식 2와수학식 3은각각외부표정요소와지상기준점에대한확률제약조건식이다. Z 1 과 Z 2 는각각외부표정요소및지상기준점에대한관측벡터를의미한다. 이단계에서는이전단계에서추정한미지수들및두종류의확률제약조건적용유무를조합하여총 8가지의수학적모델을완성한다. 수학식 2 [0033] 수학식 3 [0034] [0035] [0036] [0037] [0038] [0039] 마지막단계는지상 MMS을통해획득된실데이터를앞서제안한다양한수학적모델에따른광속조정법에적용하여영상의외부표정요소및지상점좌표를조정하고결과를분석하는단계이다. 본실시예에서이단계는도 1의광속조정부가수행할수있다. 정확도검증은정지 GPS 및토탈스테이션을통해측정한검사점과제안된방법론을통해추정된지상점과의오차를통해확인한다. 이하, 각단계에대해서좀더구체적으로설명한다. 가. 관측방정식수립일반프레임카메라에서는 3차원공간상에있는지상점이렌즈의중심인주점을지나 2차원의초점면과만나는점에영상점이생성된다. 하지만전방위카메라의경우는 2차원초점면에아닌 3차원구의표면에영상점이생성된다. 프레임카메라와전방위카메라간의차이로인해전방위영상에적합한공선조건식을수립하였다. 수학식 4는지상좌표계상에서의지상점벡터를카메라좌표상에서의지상점벡터로변환하는식이다. C P는카 메라좌표계상에서의지상점벡터이고 G P 는지상점좌표계상에서의지상점벡터이다. C GR 은지상좌표계와카 메라좌표계간의회전변환식이며, G O C 는지상좌표계상에서의카메라좌표계의중심좌표를의미한다. 수학식 4 [0040] [0041] 카메라좌표계의원점은카메라의투영중심 ( G O C ) 에해당되고, 영상점 (ρ) 은카메라투영중심을중심으로갖는 구면상에존재한다. 중심투영원리에의해투영의중심, 영상점, 지상점 ( C P) 은도 4 와같이하나의직선상에 존재한다. 영상점은극좌표계의수평각 α 와수직각 β 로표현이가능하며이는 로수학식 5 와같이 표현이가능하다. C P x, C P y, C P z 는 C P 의좌표를의미한다
![수학식 5 [0042] [0043] 수학식 4 와수학식 5 를이용하여전방위영상에서의영상점과지상점간의관계를표현할수있으며전방위영 상에적합한공선방정식을유도할수있다.](/docs-images/88/115318324/images/10-0.jpg "이러한공선방정식을이용하여전방위영상에적합한관측방정식 을수학식 6 과같이수립할수있다. 여기서 σ 0 2 은영상점측정시발생할수있는측정오차를의미하며 I2 는 2 2 의단위행렬이다.")

10 수학식 5 [0042] [0043] 수학식 4 와수학식 5 를이용하여전방위영상에서의영상점과지상점간의관계를표현할수있으며전방위영 상에적합한공선방정식을유도할수있다. 이러한공선방정식을이용하여전방위영상에적합한관측방정식 을수학식 6 과같이수립할수있다. 여기서 σ 0 2 은영상점측정시발생할수있는측정오차를의미하며 I2 는 2 2 의단위행렬이다. 수학식 6 은지상점좌표인 C P x, C P y, C P z 와투영의중심좌표인 X C, Y C, Z C 그리고지상점좌 표계와카메라좌표계간의회전변환을나타내는 ω, φ, κ 로총 9 개의계수를포함하고있다. 수학식 6 [0044] [0045] 수학식 6 을테일러급수를이용하면수학식 7 과같은선형화가가능하다. 는앞서언급한 9 개의계수에대한 미지수이고은의초기근사값이며 f 는공선조건식의함수이다. 수학식 7 [0046] [0047] 수학식 8 은수학식 7 을야코비행렬 (Jacobian Matrix) 로표현한결과이다. t 1, t 2 는수학식 9 와같이치환되었 다. 수학식 8 [0048] 수학식 9 [0049]
![[0050] 수학식 8 을각각수학식 10, 수학식 11, 수학식 12 등과같이성분별로나누어미분을수행한다.](/docs-images/88/115318324/images/11-0.jpg "수학식 10 [0051] 수학식 11 [0052] 수학식 12 [0053] [0054] 수학식 12 는 C P 을에대해미분한수식이고수학식 13 은각미지수별성분을보여주고있다. 는외부표 정요소중위치요소, 는외부표정요소중자세요소, 는지상점의 3 차원좌표를의미한다.")
11 [0050] 수학식 8 을각각수학식 10, 수학식 11, 수학식 12 등과같이성분별로나누어미분을수행한다. 수학식 10 [0051] 수학식 11 [0052] 수학식 12 [0053] [0054] 수학식 12 는 C P 을에대해미분한수식이고수학식 13 은각미지수별성분을보여주고있다. 는외부표 정요소중위치요소, 는외부표정요소중자세요소, 는지상점의 3 차원좌표를의미한다. 수학식 13 [0055] [0056] C P 의및에대한미분값은비교적단순한형태로각각수학식 14 와수학식 15 처럼표현된다. 수학식 14 [0057]
12 수학식 15 [0058] [0059] 마찬가지로 C P 의 에대한미분값은수학식 16 과같으며, C GR 는각축의회전각을곱한회전행렬로서수학식 17 과수학식 18 로표현할수있다. 수학식 17 은수학식 14 내지수학식 16 의 C GR 을정의하는것이다. C GR 은카메 라좌표계에서지상좌표계로변환할때쓰이는회전행렬이다. 수학식 18 은수학식 17 에서정의하고있는 R x (ω), R y (φ), R z (κ) 를정의하는식이다. 여기서, ω, φ, κ 는각각 X, Y, Z 축의회전각이다. 수학식 16 [0060] 수학식 17 [0061] 수학식 18 [0062] [0063] 이리하여 C GR 의 ω, φ, κ 에대한미분값은각각수학식 19, 수학식 20, 수학식 21 처럼표현된다. 수학식 19 [0064] 수학식 20 [0065]
![수학식 21 [0066] [0067] 이상설명한수학식 14 내지수학식 21 은관측방정식을푼것으로후술하는수학식 22 에서 y=a e A p ξ e +e y 에해당 한다. [0068] [0069] 나. 타입별제약조건식수립 수학식 22 는외부표정요소및지상기준점을제약조건으로사용한관측방정식을보여주고있다.](/docs-images/88/115318324/images/13-1.jpg "ξ e 는외부 표정요소에대한미지수, ξ p 는지상기준점에대한미지수이다. y는공액점의관측값이고 A e, A p 는외부표정요소의미지수인 ξ e 와지상기준점의미지수 ξ p 에대해미분을시행한공선조건식으로부터유도된디자인매트리스이다.")
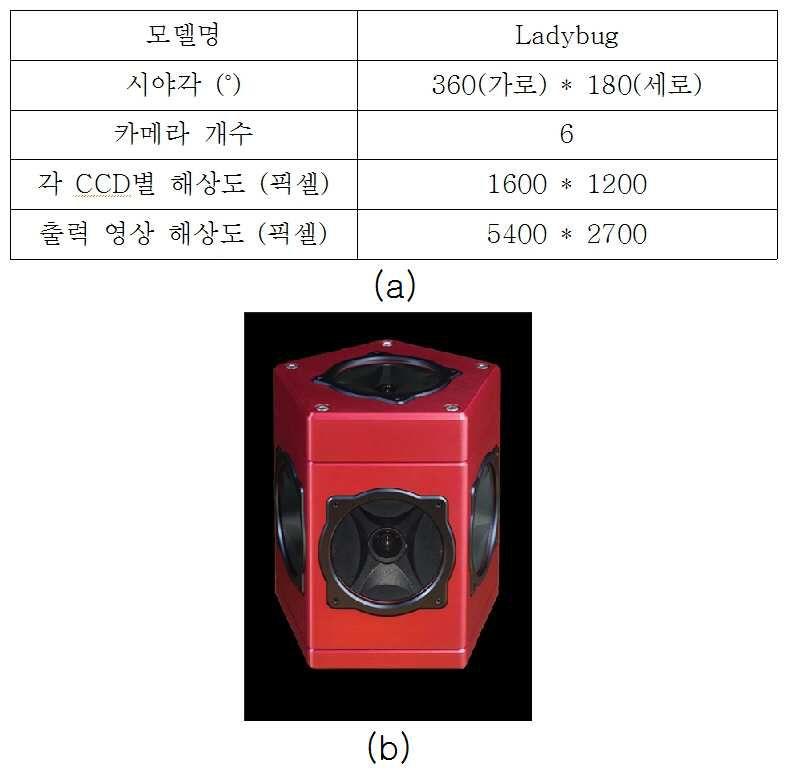
13 수학식 21 [0066] [0067] 이상설명한수학식 14 내지수학식 21 은관측방정식을푼것으로후술하는수학식 22 에서 y=a e A p ξ e +e y 에해당 한다. [0068] [0069] 나. 타입별제약조건식수립 수학식 22 는외부표정요소및지상기준점을제약조건으로사용한관측방정식을보여주고있다. ξ e 는외부 표정요소에대한미지수, ξ p 는지상기준점에대한미지수이다. y는공액점의관측값이고 A e, A p 는외부표정요소의미지수인 ξ e 와지상기준점의미지수 ξ p 에대해미분을시행한공선조건식으로부터유도된디자인매트리스이다. z 1 은 GPS/INS로부터측정된외부표정요소의관측값벡터이고, z 2 는정지 GPS 및토탈스테이션으로부터측정된지상기준점에대한관측값벡터이다. K 1, K 2 는외부표정요소및지상기준점제약조건에대한 2 디자인매트리스이다. e y, e z1, e z2 등은 y, z1, z2 등관측벡터와관련된에러벡터를의미한다. σ 0 은미지수 -1-1 들의분산성분이며, P y 는 ey 에대한코팩터매트리스를의미한다. P z1 는 GPS/INS의정밀도를의미하는 ez1 의 -1 코팩터매트리스이며, P z2 는지상기준점의정밀도를의미하는 ez2 의코팩터매트리스를의미한다. 수학식 22 [0070] [0071] [0072] [0073] [0074] [0075] 본발명에서는적용되는제약조건에따라총 4개의타입을정의하고각타입에따른정확도결과를분석하였다. 타입 1에서는제약조건을사용하지않고 GPS/INS로부터획득된초기외부표정요소를이용하여지상점을추정한다. 타입 2와타입 3에서는각각외부표정요소및지상기준점을제약조건식에적용하였다. 타입 4에서는외부표정요소와지상기준점모두를제약조건식에적용하였다. 도 5의 (a) 는각타입별로사용한요소및제약조건을보여주고있으며, 도 5의 (b) 는각타입별사용된수학적모델식을보여주고있다. 다. 실험결과및분석본발명에대한실험에서사용한전방위영상및위치 / 자세데이터는전방위카메라및 GPS/INS를탑재한지상 MMS을통해획득하였다. 전방위카메라는 Point Grey Research 사의 Ladybug3 모델로서 6개의개별 CCD를통해획득된영상을하나의영상으로통합하여전방위영상을생성하며가로방향 360도, 세로방향 180도의촬영범위 (Field of View) 를갖는다. 도 6의 (a) 는 Ladybug3의사양을보여주고있으며도 6의 (b) 는그외관을보여주고있다. 본전방위카메라가 6개의개별적인영상을취득하여최종적으로통합된하나의영상을생성하는과정은도 7의 (a) 와같다. 도 7의 (a) 는전방위카메라영상의생성과정 (Point Grey Research, 2008) 을도시한것이다. 첫단계에서는개별 CCD를통해획득된 Bayer-tiled Raw 영상을 JPEG 타입으로영상압축을한후컴퓨터로전송을한다. 컴퓨터에서는영상의압축을푼후 RGB 컬러영상으로변환하여그래픽카드로전송을한다. 여기서각종왜곡등을제거하는보정 (Rectification) 과정과영상텍스쳐의좌표계를변환하는투영 (Projection) 과정및영상을서로연결하는블랜딩 (Blending) 과정을거쳐최종영상 (Stitched Image) 을생성한다. 전방위영상이획득되는순간의외부표정요소를취득하기위해지상 MMS에 GPS/INS를탑재하였다. 탑재된시
14 스템은 Applanix 사의 POSLV 420PP 모델로서모바일매핑시스템등의이동형시스템에적합한센서이다 (Applanix, 2009). 3축방향으로가속도를측정하는가속도계 (accelerometer) 와 3개의회전축의각속도를측정하는자이로스코프 (gyroscope) 가내장된관성관측장치 (IMU) 로구성되어있다. GPS는 3차원절대좌표의위치를측정할뿐만아니라 2개의 GPS 안테나를이용하여 INS의오차를보정하는 GAMS(GNSS Azimuth Measurement Subsystem) 을사용한다. 이것은 GPS의반송파를이용해 2개의 GPS 안테나사이의상대적위치벡터를측정하는시스템으로연속적으로 INS의오차를보정한다. 도 7의 (b) 는탑재된 GPS/INS 시스템의정확도를보여주고있다. [0076] [0077] [0078] [0079] [0080] [0081] [0082] [0083] 도 8의 (a) 는본실험에서사용된지상 MMS의외관을보여주고있다. 시스템의상단부에는전방위카메라가탑재되어있고그아래로는 IMU, GPS 안테나, 수신기등이탑재되어있다. 본실험에서는오산시청주변의도로를촬영한연속된 24장의전방위영상을이용하였다. 첫영상과마지막영상간의거리는약 100m 정도이며연속된두영상간의간격은약 4m이다. 도 8의 (b) 는본실험데이터를획득한장소즉, 실험대상지를보여주고있다. 그림의중간을가로지르는노란색점선은차량의이동방향을나타낸다. 노란색으로표기된수치들은정지 GPS와토탈스테이션을통해획득한지상점으로서이중몇개의지상점은기준점으로사용되었으며나머지지상점은검사점으로사용되었다. 도 9의 (a) 는지상기준점및검사점의위치를도시한것으로서, 앞서설명한지상점들의위치및색인을보여주고있다. 붉은색색인은이지상점이기준점으로활용된것을의미하며검은색색인은검사점으로사용된것을의미한다. 그리고연속된영상을서로연결해주기위해공액점을추가적으로선정하였다. 도 9의 (b) 는공액점들중한쌍의위치를보여주고있는예시이다. 본실험에서사용한모든공액점과관련되어있는지상점의개수는총 28개이다. 각지상점은최소 4장의영상에서최대 11장의영상까지촬영되었다. 연속된두장에동시에포함되어있는지상점의평균개수는 7.9장으로서상호표정시최소로필요한공액점의개수인 5장보다많은개수이다. 실험에서사용한영상및지상점에대한정보는도 10의 (b) 에설명되어있다. 도 10의 (b) 는실험데이터정보를도시한것이다. 각각의영상에포함되어있는지상점은도 10의 (a) 를통해확인할수있다. 도 10의 (a) 는영상과지상점사이의관계를도시한것이다. 행은지상점의색인을나타내며, 열은영상의색인을나타낸다. 해당영상에해당지상점이있을경우붉은색, 아닌경우흰색으로표시된다. 예를들어, 1번지상점은 1번영상에포함되지만 2번영상에는포함되지않는다. 그리고, 전방위영상을통해공액점을측정할시의측정오차는 ±1 로설정하였다. 지상기준점및 GPS의측정오차는 ±5cm이고 INS의오차는 ±0.05 이다. 실험은실제로실험지역에서획득한전방위영상및 GPS/INS 데이터와정지 GPS 및토탈스테이션으로측정한지상기준점 / 검사점을이용하여진행하였다. 앞서제안한 8가지의수학적모델에기반하였으며그결과는도 11 의 (a) 를통해확인할수있다. 도 11의 (a) 는타입 1~2에대해추정된지상점오차를도시한것이다. 도 11에서외부표정요소를확률제약조건으로적용한타입 B의 RMSE와확률제약조건을전혀적용하지않은타입 A 의 RMSE 차이가매우적음을알수있다. 이는타입 B에서확률제약조건으로적용하였던추정된외부표정요소가지상 MMS의 GPS/INS로부터획득된초기외부표정요소와거의같음을의미한다. 이는전방위영상에서공액점을측정할때의측정오차가 GPS/INS 측정오차에비해크기때문에생기는결과이다. 그러므로연속되는영상들을이어주는공액점을통해수행되는상호표정과정은외부표정요소의정확도를향상시킬수없다. 도 11의 (b) 는타입 3과타입 4를통해추정된지상점의오차를보여주고있다. 타입 3에서는확률제한조건식에 4개의지상기준점 (1, 4, 8, 10번 ) 만을적용하였다. RMSE를다른타입과비교해보면그오차값이매우낮음을알수있다. 이를통해적은수의지상기준점을이용하여 ±5cm 정도의정확도로지상점추정이가능함을알수있었다. 하지만타입 3을이용하기위해서는높은정확도를갖는지상기준점의측정이선행되어야한다. 타입 4에서는 4개의지상기준점과외부표정요소를모두확률제한조건식에적용한결과이다. 타입 1, 2에비해서는 RMSE가향상되었지만타입 3에비해서는좋은결과를보여주지못했다. 도 12의 (a) 는측정된영상점좌표와조정계산된영상점좌표간의잔차를각타입별로보여주고있다. 잔차가크다는것은측정된영상점좌표와조정계산된영상점좌표간의차이가크며외부표정요소와지상점좌표의추정결과가좋지않음을의미한다. 각타입별잔차의양은도 12의 (a) 와같으며그통계량은도 12의 (b) 를통해확인할수있다. 도 12의 (a) ~ (b) 를통해타입 3은다른타입에비해잔차가매우낮음을알수있으며이는수학적모델의정확도가매우높음을의미한다
15 [0084] [0085] [0086] [0087] [0088] [0089] [0090] [0091] [0092] [0093] 도 13은추정된지상점, 외부표정요소및확률제약조건에사용되었던지상기준점과정확도비교를위해사용되었던검사점을보여주고있다. 파란색점은추정된지상점, 붉은색점은추정된외부표정요소이다. 붉은색원은지상기준점이고녹색원은검사점이다. 다음으로, 도 1의전방위영상광속조정장치에의한조정방법에대해서설명한다. 도 14는본발명의바람직한실시예에따른전방위영상광속조정방법을설명한흐름도이다. 이하설명은도 14를참조한다. 먼저, 연속되는전방위영상들중에서선택된공액점에대하여공선조건식을이용하여관측방정식모델을정립한다 ( 관측방정식모델정립단계, S10). 관측방정식모델정립단계 (S10) 에서는전방위영상과관련된영상좌표계의영상점좌표, 지상좌표계상에위치하는지상점좌표, 영상좌표계상에위치하는것으로서지상점에대응하는영상점을측정할때에발생되는측정오차, 및지상좌표계와영상좌표계간좌표변환계수를이용하여관측방정식모델을정립할수있다. 이점을고려할때, 관측방정식모델정립단계 (S10) 는선형화단계, 치환단계, 미분단계및정립단계를포함할수있다. 선형화단계는테일러급수를이용하여영상점좌표, 지상점좌표, 측정오차, 및좌표변환계수에의한연산식을선형화시키는단계를의미한다. 치환단계는선형화된연산식을야코비행렬형태로치환시키는단계를의미한다. 미분단계는치환된연산식을미리정해진각성분에대하여미분시키는단계를의미한다. 정립단계는지상좌표계와영상좌표계간변환을위한회전행렬로서전방위영상각축의회전각에의한회전행렬을이용하여미분단계에의해미분된연산식들로관측방정식모델을정립하는단계를의미한다. 관측방정식모델정립단계 (S10) 에서는전방위영상의공액점좌표를입력될관측데이터로하고지상점과외부표정요소를출력될미지변수로하는관측방정식모델을정립할수있다. 관측방정식모델정립단계 (S10) 이후, 미리정해진제약조건을반영및미반영하여관측방정식모델에부가하여제약조건식모델들을생성한다 ( 제약조건식모델생성단계, S20). 제약조건식모델생성단계 (S20) 에서는제약조건으로미리저장된외부표정요소와지상좌표계상에위치하는지상기준점을이용할수있다. 이점을고려할때, 본실시예에따른전방위영상광속조정방법은위치 / 자세정보획득단계, 지상기준점획득단계, 및관측데이터획득단계중적어도하나의단계를더욱수행할수있다. 위치 / 자세정보획득단계에서는위성항법장치 (GPS) 또는관성항법장치 (INS) 를이용하여외부표정요소로전방위영상을획득하는전방위영상획득장치의위치정보와자세정보를획득한다. 지상기준점획득단계에서는위성항법장치또는광파기를이용하여지상기준점을획득한다. 위치 / 자세정보획득단계와지상기준점획득단계는관측방정식모델정립단계 (S10) 와제약조건식모델생성단계 (S20) 사이에수행된다. 그러나, 반드시이에한정되는것은아니며, 관측방정식모델정립단계 (S10) 이전에수행되는것도가능하다. 관측데이터획득단계에서는지상사진측량시스템 (MMS) 을이용하여관측데이터를획득한다. 관측데이터는 GPS/INS를이용한영상획득장치의위치 / 자세정보, 지상기준점, 전방위영상등을의미한다. 본실시예에서관측데이터획득단계에서는전방위영상만을획득하는것도가능하다. 관측데이터획득단계는제약조건식모델생성단계 (S20) 와광속조정단계 (S30) 사이에수행된다. 그러나, 반드시이에한정되는것은아니며, 관측방정식모델정립단계 (S10) 와제약조건식모델생성단계 (S20) 사이에수행되거나, 관측방정식모델정립단계 (S10) 이전에수행되는것도가능하다. 제약조건식모델생성단계 (S20) 이후, 생성된제약조건식모델들과정립된관측방정식모델을이용하여전방위영상을광속조정 (bundle adjustment) 한다 ( 광속조정단계, S30). 광속조정단계 (S30) 에서는광속조정을통해전방위영상과관련된것으로서객체의 3차원모델을추출하기위한지상점과외부표정요소를추정할수있다. 이상의설명은본발명의기술사상을예시적으로설명한것에불과한것으로서, 본발명이속하는기술분야에서통상의지식을가진자라면본발명의본질적인특성에서벗어나지않는범위내에서다양한수정, 변경및치환이가능할것이다. 따라서, 본발명에개시된실시예및첨부된도면들은본발명의기술사상을한정하기위한것이아니라설명하기위한것이고, 이러한실시예및첨부된도면에의하여본발명의기술사상의범위가한정되는것은아니다. 본발명의보호범위는아래의청구범위에의하여해석되어야하며, 그와동등한범위내에있는모든기술사상은본발명의권리범위에포함되는것으로해석되어야할것이다. 산업상이용가능성
16 [0094] 본발명에서연속된전방위카메라영상을이용하여지상점및외부표정요소의추정이가능함을알수있었다. 이를위해전방위영상에적합한공선방정식을새로이수립하였고이를이용하여관측방정식도수립하였다. 또한, GPS/INS로부터획득된외부표정요소및정지 GPS와토탈스테이션을통해획득된지상기준점을이용한확률제약조건식을수립하여 4가지타입별정확도를검증하였다. 본발명을통해높은정확도를갖는지상기준점이있다면 5cm 내외의정확도를갖는지상점추출이가능함을알수있었다. 이는정밀한 3차원도시모델링등의분야에서널리활용될수있음을의미한다. 본발명은실시간공중자료획득시스템분야에도적용가능하다. [0095] 부호의설명 100 : 전방위영상광속조정장치 110 : 관측방정식모델정립부 111 : 선형화부 112 : 치환부 113 : 미분부 114 : 정립부 120 : 제약조건식모델생성부 130 : 광속조정부 210 : 위치 / 자세정보획득부 220 : 지상기준점획득부 230 : 전방위영상획득부 240 : 공선조건식설정부 241 : 변환부 242 : 계산부 243 : 설정부 도면 도면
17 도면 2 도면 3 도면
18 도면
19 도면
20 도면

21 도면 8 도면

22 도면 10 도면
23 도면 12 도면
24 도면
PowerPoint 프레젠테이션
 03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
특허청구의 범위 청구항 1 복수개의 프리캐스트 콘크리트 부재(1)를 서로 결합하여 연속화시키는 구조로서, 삽입공이 형성되어 있고 상기 삽입공 내면에는 나사부가 형성되어 있는 너트형 고정부재(10)가, 상기 프리캐스 트 콘크리트 부재(1) 내에 내장되도록 배치되는 내부
를 서로 결합하여 연속화시키는 구조로서, 삽입공이 형성되어 있고 상기 삽입공 내면에는 나사부가 형성되어 있는 너트형 고정부재(10)가, 상기 프리캐스 트 콘크리트 부재(1) 내에 내장되도록 배치되는 내부") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) E01D 19/12 (2006.01) E01D 2/00 (2006.01) E01D 21/00 (2006.01) (21) 출원번호 10-2011-0036938 (22) 출원일자 2011년04월20일 심사청구일자 2011년04월20일 (65) 공개번호 10-2012-0119156
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) E01D 19/12 (2006.01) E01D 2/00 (2006.01) E01D 21/00 (2006.01) (21) 출원번호 10-2011-0036938 (22) 출원일자 2011년04월20일 심사청구일자 2011년04월20일 (65) 공개번호 10-2012-0119156
Microsoft Word - 4장_처짐각법.doc
 동아대학교토목공학과구조역학 4. 처짐각법 변위법 (Slope Deflection ethod Displacement ethod) Objective of this chapter: 처짐각법의기본개념. What will be presented: 처짐각법을이용한다차부정정보해석 처짐각법을이용한다차부정정골조해석 Theoretical background 미국미네소타대학의
동아대학교토목공학과구조역학 4. 처짐각법 변위법 (Slope Deflection ethod Displacement ethod) Objective of this chapter: 처짐각법의기본개념. What will be presented: 처짐각법을이용한다차부정정보해석 처짐각법을이용한다차부정정골조해석 Theoretical background 미국미네소타대학의
특허청구의범위청구항 1 복수의영상검출부로부터출력되는영상의히스토그램 (histogram) 을계산하는단계 ; 상기복수의영상검출부로부터출력되는영상을히스토그램평활화 (histogram equalization) 하는단계 ; 상기복수의영상검출부중하나의영상검출부를선택하는단계 ; 및
 을계산하는단계 ; 상기복수의영상검출부로부터출력되는영상을히스토그램평활화 (histogram equalization) 하는단계 ; 상기복수의영상검출부중하나의영상검출부를선택하는단계 ; 및") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년12월18일 (11) 등록번호 10-1473415 (24) 등록일자 2014년12월10일 (51) 국제특허분류 (Int. Cl.) G06T 5/40 (2006.01) H04N 5/217 (2011.01) (21) 출원번호 10-2012-0156871 (22) 출원일자 2012
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2014년12월18일 (11) 등록번호 10-1473415 (24) 등록일자 2014년12월10일 (51) 국제특허분류 (Int. Cl.) G06T 5/40 (2006.01) H04N 5/217 (2011.01) (21) 출원번호 10-2012-0156871 (22) 출원일자 2012
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
1 경영학을 위한 수학 Final Exam 2015/12/12(토) 13:00-15:00 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오. 1. (각 6점) 다음 적분을 구하시오 Z 1 4 Z 1 (x + 1) dx (a) 1 (x 1)4 dx 1 Solut
 13:00-15:00 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오. 1. (각 6점) 다음 적분을 구하시오 Z 1 4 Z 1 (x + 1) dx (a) 1 (x 1)4 dx 1 Solut") 경영학을 위한 수학 Fial Eam 5//(토) :-5: 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오.. (각 6점) 다음 적분을 구하시오 4 ( ) (a) ( )4 8 8 (b) d이 성립한다. d C C log log (c) 이다. 양변에 적분을 취하면 log C (d) 라 하자. 그러면 d 4이다. 9 9 4 / si (e) cos si
경영학을 위한 수학 Fial Eam 5//(토) :-5: 풀이과정을 모두 명시하시오. 정리를 사용할 경우 명시하시오.. (각 6점) 다음 적분을 구하시오 4 ( ) (a) ( )4 8 8 (b) d이 성립한다. d C C log log (c) 이다. 양변에 적분을 취하면 log C (d) 라 하자. 그러면 d 4이다. 9 9 4 / si (e) cos si
(52) CPC 특허분류 B01D 53/62 ( ) Y02C 10/10 ( ) (72) 발명자 이정현 대전광역시서구대덕대로 246 넥서스밸리 B 동 1417 호 박영철 대전광역시유성구반석동로 33 반석마을 5 단지아파트 505 동 201 호 이발명
 CPC 특허분류 B01D 53/62 ( ) Y02C 10/10 ( ) (72) 발명자 이정현 대전광역시서구대덕대로 246 넥서스밸리 B 동 1417 호 박영철 대전광역시유성구반석동로 33 반석마을 5 단지아파트 505 동 201 호 이발명") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B01D 53/22 (2006.01) B01D 53/62 (2006.01) (52) CPC 특허분류 B01D 53/225 (2013.01) B01D 53/228 (2013.01) (21) 출원번호 10-2015-0076621 (22) 출원일자 2015 년
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B01D 53/22 (2006.01) B01D 53/62 (2006.01) (52) CPC 특허분류 B01D 53/225 (2013.01) B01D 53/228 (2013.01) (21) 출원번호 10-2015-0076621 (22) 출원일자 2015 년
특허청구의범위청구항 1 선박의안티재머 (Anti-Jammer) 위성항법시스템으로서, GPS 신호및 DGPS 신호를자함의 INS(Intertial Navigation System) 신호와비교하여기준오차범위초과시수신되는 GPS 신호와 DGPS 신호를재밍 (Jamming)
 위성항법시스템으로서, GPS 신호및 DGPS 신호를자함의 INS(Intertial Navigation System) 신호와비교하여기준오차범위초과시수신되는 GPS 신호와 DGPS 신호를재밍 (Jamming)") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2014-0044048 (43) 공개일자 2014년04월14일 (51) 국제특허분류 (Int. Cl.) G01S 19/07 (2010.01) (21) 출원번호 10-2012-0109967 (22) 출원일자 2012 년 10 월 04 일 심사청구일자 없음 전체청구항수 : 총 4
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2014-0044048 (43) 공개일자 2014년04월14일 (51) 국제특허분류 (Int. Cl.) G01S 19/07 (2010.01) (21) 출원번호 10-2012-0109967 (22) 출원일자 2012 년 10 월 04 일 심사청구일자 없음 전체청구항수 : 총 4
한것으로스마트단말기에의하여드론조종앱을설치하는제 1 단계 ; 스마트단말기에의하여드론의불루투스통 신부에부여된고유식별번호를입력저장하고드론의불루투스를인식하며드론의블루투스통신부로부터회신되 는신호의수신레벨을분석하여최대통신거리를확인하여저장하는제 2 단계 ; 스마트단말기에의하여최대통
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B64C 13/20 (2006.01) B64C 39/02 (2006.01) G05D 1/00 (2006.01) H04M 1/725 (2006.01) (52) CPC 특허분류 B64C 13/20 (2013.01) B64C 39/024 (2013.01) (21)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B64C 13/20 (2006.01) B64C 39/02 (2006.01) G05D 1/00 (2006.01) H04M 1/725 (2006.01) (52) CPC 특허분류 B64C 13/20 (2013.01) B64C 39/024 (2013.01) (21)
PowerPoint Template
 2016 오픈테크넷 라이브드론맵 : 실시간자동매핑시스템 2016.10.19 이임평, 최경아, 천장우서울시립대학교공간정보공학과센서및모델링연구실 구성 1 2 시스템소개 실험적검증 3 4 시스템활용 결론및향후계획 2 1 시스템소개 3 1.1 실시간자동매핑시스템 멀티센서를탑재한 UAV 를이용하여대상지역의최신의공간정보를빠르고자동으로생성하는시스템 전체시스템은항공부문과지상부문으로구성
2016 오픈테크넷 라이브드론맵 : 실시간자동매핑시스템 2016.10.19 이임평, 최경아, 천장우서울시립대학교공간정보공학과센서및모델링연구실 구성 1 2 시스템소개 실험적검증 3 4 시스템활용 결론및향후계획 2 1 시스템소개 3 1.1 실시간자동매핑시스템 멀티센서를탑재한 UAV 를이용하여대상지역의최신의공간정보를빠르고자동으로생성하는시스템 전체시스템은항공부문과지상부문으로구성
이 발명을 지원한 국가연구개발사업 과제고유번호 20110026962 부처명 교육과학기술부 연구사업명 기초사업연구-일반연구자지원사업-기본연구지원사업(유형II) 연구과제명 시공간 부호 협력 통신을 위한 동기 알고리즘 연구 기 여 율 1/1 주관기관 서울시립대학교 산학협력단
 연구과제명 시공간 부호 협력 통신을 위한 동기 알고리즘 연구 기 여 율 1/1 주관기관 서울시립대학교 산학협력단") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H04J 11/00 (2006.01) (21) 출원번호 10-2012-0038191 (22) 출원일자 2012년04월13일 심사청구일자 2012년04월13일 (65) 공개번호 10-2013-0115668 (43) 공개일자 2013년10월22일 (56) 선행기술조사문헌
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) H04J 11/00 (2006.01) (21) 출원번호 10-2012-0038191 (22) 출원일자 2012년04월13일 심사청구일자 2012년04월13일 (65) 공개번호 10-2013-0115668 (43) 공개일자 2013년10월22일 (56) 선행기술조사문헌
이발명을지원한국가연구개발사업 과제고유번호 부처명 미래창조부 연구관리전문기관 한국산업기술평가관리원 연구사업명 산업융합원천기술개발 연구과제명 단일노드 48TB 이상을지원하는개방형하둡스토리지어플라이언스 (Hadoop Storage Appliance) 개발 기
 개발 기") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2015년12월03일 (11) 등록번호 10-1573375 (24) 등록일자 2015년11월25일 (51) 국제특허분류 (Int. Cl.) G06F 12/08 (2006.01) (21) 출원번호 10-2013-0131411 (22) 출원일자 2013 년 10 월 31 일 심사청구일자
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2015년12월03일 (11) 등록번호 10-1573375 (24) 등록일자 2015년11월25일 (51) 국제특허분류 (Int. Cl.) G06F 12/08 (2006.01) (21) 출원번호 10-2013-0131411 (22) 출원일자 2013 년 10 월 31 일 심사청구일자
LIDAR와 영상 Data Fusion에 의한 건물 자동추출
 i ii iii iv v vi vii 1 2 3 4 Image Processing Image Pyramid Edge Detection Epipolar Image Image Matching LIDAR + Photo Cross correlation Least Squares Epipolar Line Matching Low Level High Level Space
i ii iii iv v vi vii 1 2 3 4 Image Processing Image Pyramid Edge Detection Epipolar Image Image Matching LIDAR + Photo Cross correlation Least Squares Epipolar Line Matching Low Level High Level Space
Vector Differential: 벡터 미분 Yonghee Lee October 17, 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표
 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표") Vector Differential: 벡터 미분 Yonhee Lee October 7, 08 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표기법을 정의하는 방법이다 보통 스칼라(scalar)에 대한 미분은 일분수 함수 f : < < 또는 다변수 함수(function
Vector Differential: 벡터 미분 Yonhee Lee October 7, 08 벡터미분의 표기 스칼라미분 벡터미분(Vector diffrential) 또는 행렬미분(Matrix differential)은 벡터와 행렬의 미분식에 대 한 표기법을 정의하는 방법이다 보통 스칼라(scalar)에 대한 미분은 일분수 함수 f : < < 또는 다변수 함수(function
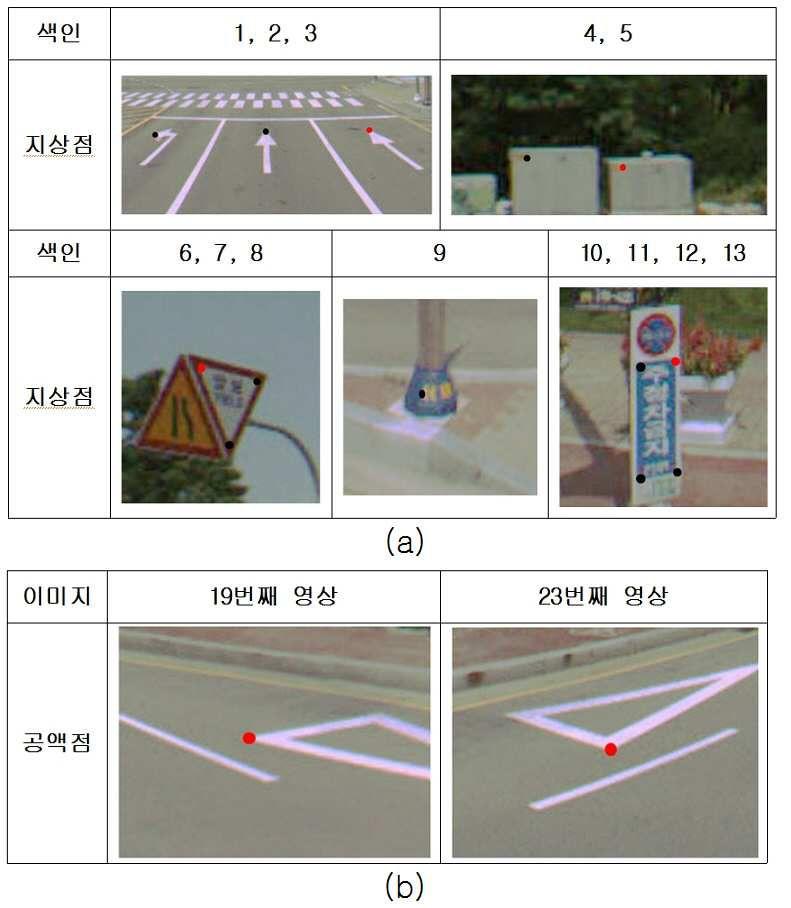
 (Hyunoo Shim) 1 / 24 (Discrete-time Markov Chain) * 그림 이산시간이다연쇄 (chain) 이다왜 Markov? (See below) ➀ 이산시간연쇄 (Discrete-time chain): : Y Y 의상태공간 = {0, 1, 2,..., n} Y n Y 의 n 시점상태 {Y n = j} Y 가 n 시점에상태 j 에있는사건
(Hyunoo Shim) 1 / 24 (Discrete-time Markov Chain) * 그림 이산시간이다연쇄 (chain) 이다왜 Markov? (See below) ➀ 이산시간연쇄 (Discrete-time chain): : Y Y 의상태공간 = {0, 1, 2,..., n} Y n Y 의 n 시점상태 {Y n = j} Y 가 n 시점에상태 j 에있는사건
서 인코딩한 데이터를 무선으로 송신하기 위한 무선 송신 수단; 및 통화중 상기 입력 수단으로부터의 음원 데이터 전송신 호에 따라 상기 저장 수단에 저장되어 있는 해당 음원 데이터를 상기 디코딩 수단에 의해 디코딩하고, 상기 디코딩한 음원 데이터와 상기 입력 수단을 통해
 (51) Int. Cl. H04B 1/40 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월23일 10-0646983 2006년11월09일 (21) 출원번호 10-2004-0053063 (65) 공개번호 10-2006-0004082 (22) 출원일자 2004년07월08일
(51) Int. Cl. H04B 1/40 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월23일 10-0646983 2006년11월09일 (21) 출원번호 10-2004-0053063 (65) 공개번호 10-2006-0004082 (22) 출원일자 2004년07월08일
특허청구의 범위 청구항 1 앵커(20)를 이용한 옹벽 시공에 사용되는 옹벽패널에 있어서, 단위패널형태의 판 형태로 구성되며, 내부 중앙부가 후방 하부를 향해 기울어지도록 돌출 형성되어, 전면이 오 목하게 들어가고 후면이 돌출된 결속부(11)를 형성하되, 이 결속부(11
를 이용한 옹벽 시공에 사용되는 옹벽패널에 있어서, 단위패널형태의 판 형태로 구성되며, 내부 중앙부가 후방 하부를 향해 기울어지도록 돌출 형성되어, 전면이 오 목하게 들어가고 후면이 돌출된 결속부(11)를 형성하되, 이 결속부(11") (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) E02D 29/02 (2006.01) E02D 17/20 (2006.01) E02B 3/14 (2006.01) (21) 출원번호 10-2010-0089517 (22) 출원일자 2010년09월13일 심사청구일자 (56) 선행기술조사문헌 JP2006037700 A* KR100920461
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) E02D 29/02 (2006.01) E02D 17/20 (2006.01) E02B 3/14 (2006.01) (21) 출원번호 10-2010-0089517 (22) 출원일자 2010년09월13일 심사청구일자 (56) 선행기술조사문헌 JP2006037700 A* KR100920461
이 발명을 지원한 국가연구개발사업 과제고유번호 A1100-0801-2739 부처명 지식경제부 연구관리전문기관 연구사업명 IT핵심기술개발 연구과제명 융합형 포털서비스를 위한 이용자 참여형 방송기술개발 기여율 주관기관 전자부품연구원 연구기간 2008년 03월 01일 ~ 2
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G06Q 30/00 (2006.01) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0133476 (22) 출원일자 2008년12월24일 심사청구일자 2008년12월24일 (65) 공개번호 10-2010-0074918 (43) 공개일자 2010년07월02일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G06Q 30/00 (2006.01) G06Q 50/00 (2006.01) (21) 출원번호 10-2008-0133476 (22) 출원일자 2008년12월24일 심사청구일자 2008년12월24일 (65) 공개번호 10-2010-0074918 (43) 공개일자 2010년07월02일
완벽한개념정립 _ 행렬의참, 거짓 수학전문가 NAMU 선생 1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에
,, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에") 1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에대하여 AB=BA 1 가성립한다 2 3 (4) 이면 1 곱셈공식및변형공식성립 ± ± ( 복호동순 ), 2 지수법칙성립 (은자연수 ) < 거짓인명제 >
1. 행렬의참, 거짓개념정리 1. 교환법칙과관련한내용, 는항상성립하지만 는항상성립하지는않는다. < 참인명제 > (1),, (2) ( ) 인경우에는 가성립한다.,,, (3) 다음과같은관계식을만족하는두행렬 A,B에대하여 AB=BA 1 가성립한다 2 3 (4) 이면 1 곱셈공식및변형공식성립 ± ± ( 복호동순 ), 2 지수법칙성립 (은자연수 ) < 거짓인명제 >
이발명을지원한국가연구개발사업 과제고유번호 07기술혁신A01 부처명 국토해양부 연구사업명 건설기술혁신사업 연구과제명 SMART 도로-자동차연계기술개발 (SMART 도로-자동차통합정보기반관리시스템구축 ) 주관기관 메타빌드주식회사 연구기간 ~
 주관기관 메타빌드주식회사 연구기간 ~") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2012-0113455 (43) 공개일자 2012년10월15일 (51) 국제특허분류 (Int. Cl.) G08B 25/10 (2006.01) G08B 23/00 (2006.01) G08G 1/0968 (2006.01) G01S 13/53 (2006.01) (21) 출원번호 10-2011-0031173
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (11) 공개번호 10-2012-0113455 (43) 공개일자 2012년10월15일 (51) 국제특허분류 (Int. Cl.) G08B 25/10 (2006.01) G08B 23/00 (2006.01) G08G 1/0968 (2006.01) G01S 13/53 (2006.01) (21) 출원번호 10-2011-0031173
(b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로
 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로") Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
본 발명은 중공코어 프리캐스트 슬래브 및 그 시공방법에 관한 것으로, 자세하게는 중공코어로 형성된 프리캐스트 슬래브 에 온돌을 일체로 구성한 슬래브 구조 및 그 시공방법에 관한 것이다. 이를 위한 온돌 일체형 중공코어 프리캐스트 슬래브는, 공장에서 제작되는 중공코어 프
 (51) Int. Cl. E04B 5/32 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2007년03월12일 10-0693122 2007년03월05일 (21) 출원번호 10-2006-0048965 (65) 공개번호 (22) 출원일자 2006년05월30일 (43) 공개일자 심사청구일자
(51) Int. Cl. E04B 5/32 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2007년03월12일 10-0693122 2007년03월05일 (21) 출원번호 10-2006-0048965 (65) 공개번호 (22) 출원일자 2006년05월30일 (43) 공개일자 심사청구일자
Microsoft PowerPoint - ch02-1.ppt
 2. Coodinte Sstems nd Tnsfomtion 20 20 2.2 Ctesin Coodintes (,, ) () (b) Figue 1.1 () Unit vectos,, nd, (b) components of long,, nd. 직각좌표계에서각변수 (,, ) 들의범위 < < < < < < (2.1) 직각좌표계에서임의의벡터 는,, 가그림 1.1 에서와같이,,
2. Coodinte Sstems nd Tnsfomtion 20 20 2.2 Ctesin Coodintes (,, ) () (b) Figue 1.1 () Unit vectos,, nd, (b) components of long,, nd. 직각좌표계에서각변수 (,, ) 들의범위 < < < < < < (2.1) 직각좌표계에서임의의벡터 는,, 가그림 1.1 에서와같이,,
명세서청구범위청구항 1 갠트리의헤드로부터방사선을조사하는선형가속기에사용되고, 상기헤드에설치되고, 방사선이조사되는환자의치료중심을향해레이저를쏘고환자의체표면에서반사된레이저를감지하여환자의체표면까지의거리를측정하는레이저거리측정기 ; 상기레이저거리측정기의데이터를수신하여 SSD(sou
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) A61N 5/10 (2006.01) (21) 출원번호 10-2014-0107105 (22) 출원일자 2014 년 08 월 18 일 심사청구일자 (56) 선행기술조사문헌 JP2012024909 A* JP2012501792 A* US20100280374 A1
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) A61N 5/10 (2006.01) (21) 출원번호 10-2014-0107105 (22) 출원일자 2014 년 08 월 18 일 심사청구일자 (56) 선행기술조사문헌 JP2012024909 A* JP2012501792 A* US20100280374 A1
(72) 발명자 박세웅 서울특별시관악구신림동산 56-1 서울대학교뉴미디어통신공동연구소 최진구 서울특별시영등포구당산동 2 가대우메종아파트 101 동 909 호 - 2 -
 발명자 박세웅 서울특별시관악구신림동산 56-1 서울대학교뉴미디어통신공동연구소 최진구 서울특별시영등포구당산동 2 가대우메종아파트 101 동 909 호 - 2 -") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) H04B 7/26 (2006.01) H04B 7/155 (2006.01) H04Q 7/30 (2006.01) H04Q 7/20 (2006.01) (21) 출원번호 10-2006-0085572 (22) 출원일자 2006 년 09 월 06 일 심사청구일자 2006 년 09 월
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) H04B 7/26 (2006.01) H04B 7/155 (2006.01) H04Q 7/30 (2006.01) H04Q 7/20 (2006.01) (21) 출원번호 10-2006-0085572 (22) 출원일자 2006 년 09 월 06 일 심사청구일자 2006 년 09 월
실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터
 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터") 실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터의전면패널에꼽는다. 통상적으로검은색프로브는전면패널의검은단자 (COM) 에꼽으며, 빨간색프로브는빨간색단자에꼽는다.
실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터의전면패널에꼽는다. 통상적으로검은색프로브는전면패널의검은단자 (COM) 에꼽으며, 빨간색프로브는빨간색단자에꼽는다.
문제지 제시문 2 보이지 않는 영역에 대한 정보를 얻기 위하여 관측된 다른 정보를 분석하여 역으로 미 관측 영역 에 대한 정보를 얻을 수 있다. 가령 주어진 영역에 장애물이 있는 경우 한 끝 점에서 출발하여 다른 끝 점에 도달하는 최단 경로의 개수를 분석하여 장애물의
 제시문 문제지 2015학년도 대학 신입학생 수시모집 일반전형 면접 및 구술고사 수학 제시문 1 하나의 동전을 던질 때, 앞면이나 뒷면이 나온다. 번째 던지기 전까지 뒷면이 나온 횟수를 라 하자( ). 처음 던지기 전 가진 점수를 점이라 하고, 번째 던졌을 때, 동전의 뒷면이 나오면 가지고 있던 점수를 그대로 두고, 동전의 앞면이 나오면 가지고 있던 점수를 배
제시문 문제지 2015학년도 대학 신입학생 수시모집 일반전형 면접 및 구술고사 수학 제시문 1 하나의 동전을 던질 때, 앞면이나 뒷면이 나온다. 번째 던지기 전까지 뒷면이 나온 횟수를 라 하자( ). 처음 던지기 전 가진 점수를 점이라 하고, 번째 던졌을 때, 동전의 뒷면이 나오면 가지고 있던 점수를 그대로 두고, 동전의 앞면이 나오면 가지고 있던 점수를 배
(72) 발명자 오인환 서울 노원구 중계로 195, 101동 803호 (중계동, 신 안동진아파트) 서혜리 서울 종로구 평창14길 23, (평창동) 한훈식 서울 강남구 언주로71길 25-5, 301호 (역삼동, 영 훈하이츠) 이 발명을 지원한 국가연구개발사업 과제고유번호
 발명자 오인환 서울 노원구 중계로 195, 101동 803호 (중계동, 신 안동진아파트) 서혜리 서울 종로구 평창14길 23, (평창동) 한훈식 서울 강남구 언주로71길 25-5, 301호 (역삼동, 영 훈하이츠) 이 발명을 지원한 국가연구개발사업 과제고유번호") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2014년04월14일 (11) 등록번호 10-1384704 (24) 등록일자 2014년04월07일 (51) 국제특허분류(Int. Cl.) F16L 9/18 (2006.01) F17D 1/00 (2006.01) F16L 3/00 (2006.01) (21) 출원번호 10-2012-0113933
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2014년04월14일 (11) 등록번호 10-1384704 (24) 등록일자 2014년04월07일 (51) 국제특허분류(Int. Cl.) F16L 9/18 (2006.01) F17D 1/00 (2006.01) F16L 3/00 (2006.01) (21) 출원번호 10-2012-0113933
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
(72) 발명자 배경렬 대구광역시동구아양로 37 길 ( 신암동 ) 손현식 대구광역시동구송라로 109( 신암동 ) 이발명을지원한국가연구개발사업 과제고유번호 부처명 지식경제부 연구사업명 정보통신기술인력양성 연구과제명 스마트자동차를위한 AU
 발명자 배경렬 대구광역시동구아양로 37 길 ( 신암동 ) 손현식 대구광역시동구송라로 109( 신암동 ) 이발명을지원한국가연구개발사업 과제고유번호 부처명 지식경제부 연구사업명 정보통신기술인력양성 연구과제명 스마트자동차를위한 AU") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04N 13/00 (2006.01) (21) 출원번호 10-2012-0128809 (22) 출원일자 2012 년 11 월 14 일 심사청구일자 2012 년 11 월 14 일 (65) 공개번호 10-2013-0058611 (43) 공개일자 2013 년 06
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04N 13/00 (2006.01) (21) 출원번호 10-2012-0128809 (22) 출원일자 2012 년 11 월 14 일 심사청구일자 2012 년 11 월 14 일 (65) 공개번호 10-2013-0058611 (43) 공개일자 2013 년 06
실용신안 등록청구의 범위 청구항 1 톤백마대가 설치될 수 있도록 일정간격을 두고 설치되는 한 쌍의 지지프레임과, 상기 지지프레임과 지지프레임의 상부를 서로 연결하는 한 쌍의 연결프레임과, 상기 연결프레임의 상부에 일정간격을 두고 다수 설치되어 상기 톤백마대와 그 투입구
 (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) (51) 국제특허분류(Int. Cl.) B65B 67/12 (2006.01) B65D 88/16 (2006.01) (21) 출원번호 20-2012-0003587 (22) 출원일자 2012년05월01일 심사청구일자 2012년05월01일 (11) 공개번호 20-2013-0006479 (43) 공개일자
(19) 대한민국특허청(KR) (12) 공개실용신안공보(U) (51) 국제특허분류(Int. Cl.) B65B 67/12 (2006.01) B65D 88/16 (2006.01) (21) 출원번호 20-2012-0003587 (22) 출원일자 2012년05월01일 심사청구일자 2012년05월01일 (11) 공개번호 20-2013-0006479 (43) 공개일자
 *) α ρ : 0.7 0.5 0.5 0.7 0.5 0.5-1 - 1 - - 0.7 (**) 0.5 0.5-1 - (**) Max i e i Max 1 =150 kg e 1 = 50 g xxx.050 kg xxx.050 kg xxx.05 kg xxx.05 kg Max 2=300 kg
*) α ρ : 0.7 0.5 0.5 0.7 0.5 0.5-1 - 1 - - 0.7 (**) 0.5 0.5-1 - (**) Max i e i Max 1 =150 kg e 1 = 50 g xxx.050 kg xxx.050 kg xxx.05 kg xxx.05 kg Max 2=300 kg
PowerPoint 프레젠테이션
 06 Texture Mapping 01 Texture Mapping 의종류 02 Texture Mapping 이가능한객체생성 03 고급 Texture Mapping 01 Texture Mapping 의종류 1. 수동 Texture Mapping 2. 자동 Texture Mapping 2 01 Texture Mapping 의종류 좌표변환 Pipeline 에서
06 Texture Mapping 01 Texture Mapping 의종류 02 Texture Mapping 이가능한객체생성 03 고급 Texture Mapping 01 Texture Mapping 의종류 1. 수동 Texture Mapping 2. 자동 Texture Mapping 2 01 Texture Mapping 의종류 좌표변환 Pipeline 에서
(72) 발명자 김도규 서울특별시성북구장위 3 동 박준일 서울특별시강서구등촌동 서광아파트 103 동 803 호 유형규 경기도광명시광명 4 동한진아파트 101 동 1801 호 - 2 -
 발명자 김도규 서울특별시성북구장위 3 동 박준일 서울특별시강서구등촌동 서광아파트 103 동 803 호 유형규 경기도광명시광명 4 동한진아파트 101 동 1801 호 - 2 -") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) F25B 30/06 (2006.01) (21) 출원번호 10-2008-0088941 (22) 출원일자 2008 년 09 월 09 일 심사청구일자 전체청구항수 : 총 7 항 2008 년 09 월 09 일 (54) 지중열교환기의공급파이프 (11) 공개번호 10-2010-0030143
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) F25B 30/06 (2006.01) (21) 출원번호 10-2008-0088941 (22) 출원일자 2008 년 09 월 09 일 심사청구일자 전체청구항수 : 총 7 항 2008 년 09 월 09 일 (54) 지중열교환기의공급파이프 (11) 공개번호 10-2010-0030143
<B4EBC7D0BCF6C7D02DBBEFB0A2C7D4BCF62E687770>
 삼각함수. 삼각함수의덧셈정리 삼각함수의덧셈정리 삼각함수 sin (α + β ), cos (α + β ), tan (α + β ) 등을 α 또는 β 의삼각함수로나 타낼수있다. 각 α 와각 β 에대하여 α >0, β >0이고 0 α - β < β 를만족한다고가정하 자. 다른경우에도같은방법으로증명할수있다. 각 α 와각 β 에대하여 θ = α - β 라고놓자. 위의그림에서원점에서거리가
삼각함수. 삼각함수의덧셈정리 삼각함수의덧셈정리 삼각함수 sin (α + β ), cos (α + β ), tan (α + β ) 등을 α 또는 β 의삼각함수로나 타낼수있다. 각 α 와각 β 에대하여 α >0, β >0이고 0 α - β < β 를만족한다고가정하 자. 다른경우에도같은방법으로증명할수있다. 각 α 와각 β 에대하여 θ = α - β 라고놓자. 위의그림에서원점에서거리가
PowerPoint 프레젠테이션
 System Software Experiment 1 Lecture 5 - Array Spring 2019 Hwansoo Han (hhan@skku.edu) Advanced Research on Compilers and Systems, ARCS LAB Sungkyunkwan University http://arcs.skku.edu/ 1 배열 (Array) 동일한타입의데이터가여러개저장되어있는저장장소
System Software Experiment 1 Lecture 5 - Array Spring 2019 Hwansoo Han (hhan@skku.edu) Advanced Research on Compilers and Systems, ARCS LAB Sungkyunkwan University http://arcs.skku.edu/ 1 배열 (Array) 동일한타입의데이터가여러개저장되어있는저장장소
untitled
 전방향카메라와자율이동로봇 2006. 12. 7. 특허청전기전자심사본부유비쿼터스심사팀 장기정 전방향카메라와자율이동로봇 1 Omnidirectional Cameras 전방향카메라와자율이동로봇 2 With Fisheye Lens 전방향카메라와자율이동로봇 3 With Multiple Cameras 전방향카메라와자율이동로봇 4 With Mirrors 전방향카메라와자율이동로봇
전방향카메라와자율이동로봇 2006. 12. 7. 특허청전기전자심사본부유비쿼터스심사팀 장기정 전방향카메라와자율이동로봇 1 Omnidirectional Cameras 전방향카메라와자율이동로봇 2 With Fisheye Lens 전방향카메라와자율이동로봇 3 With Multiple Cameras 전방향카메라와자율이동로봇 4 With Mirrors 전방향카메라와자율이동로봇
<BFACBDC0B9AEC1A6C7AEC0CC5F F E687770>
 IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
IT OOKOOK 87 이론, 실습, 시뮬레이션 디지털논리회로 ( 개정 3 판 ) (Problem Solutions of hapter 9) . T 플립플롭으로구성된순서논리회로의해석 () 변수명칭부여 F-F 플립플롭의입력 :, F-F 플립플롭의출력 :, (2) 불대수식유도 플립플롭의입력 : F-F 플립플롭의입력 : F-F 플립플롭의출력 : (3) 상태표작성 이면,
Microsoft PowerPoint - Java7.pptx
 HPC & OT Lab. 1 HPC & OT Lab. 2 실습 7 주차 Jin-Ho, Jang M.S. Hanyang Univ. HPC&OT Lab. jinhoyo@nate.com HPC & OT Lab. 3 Component Structure 객체 (object) 생성개념을이해한다. 외부클래스에대한접근방법을이해한다. 접근제어자 (public & private)
HPC & OT Lab. 1 HPC & OT Lab. 2 실습 7 주차 Jin-Ho, Jang M.S. Hanyang Univ. HPC&OT Lab. jinhoyo@nate.com HPC & OT Lab. 3 Component Structure 객체 (object) 생성개념을이해한다. 외부클래스에대한접근방법을이해한다. 접근제어자 (public & private)
Microsoft Word - Lab.4
 Lab. 1. I-V Lab. 4. 연산증폭기 Characterist 비 tics of a Dio 비교기 ode 응용 회로 1. 실험목표 연산증폭기를이용한비교기비교기응용회로를이해 응용회로를구성, 측정및평가해서연산증폭기 2. 실험회로 A. 연산증폭기비교기응용회로 (a) 기본비교기 (b) 출력제한 비교기 (c) 슈미트트리거 (d) 포화반파정류회로그림 4.1. 연산증폭기비교기응용회로
Lab. 1. I-V Lab. 4. 연산증폭기 Characterist 비 tics of a Dio 비교기 ode 응용 회로 1. 실험목표 연산증폭기를이용한비교기비교기응용회로를이해 응용회로를구성, 측정및평가해서연산증폭기 2. 실험회로 A. 연산증폭기비교기응용회로 (a) 기본비교기 (b) 출력제한 비교기 (c) 슈미트트리거 (d) 포화반파정류회로그림 4.1. 연산증폭기비교기응용회로
등록특허 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G01B 11/16 ( ) (21) 출원번호 (22) 출원일자 2005 년 09 월 23 일 심사청구일자 2005
 Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G01B 11/16 ( ) (21) 출원번호 (22) 출원일자 2005 년 09 월 23 일 심사청구일자 2005") (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G01B 11/16 (2006.01) (21) 출원번호 10-2005-0088727 (22) 출원일자 2005 년 09 월 23 일 심사청구일자 2005 년 09 월 23 일 (65) 공개번호 10-2007-0095493 (43) 공개일자 2007 년 10 월 01 일 (56)
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) G01B 11/16 (2006.01) (21) 출원번호 10-2005-0088727 (22) 출원일자 2005 년 09 월 23 일 심사청구일자 2005 년 09 월 23 일 (65) 공개번호 10-2007-0095493 (43) 공개일자 2007 년 10 월 01 일 (56)
제 3강 역함수의 미분과 로피탈의 정리
 제 3 강역함수의미분과로피탈의정리 역함수의미분 : 두실수 a b 와폐구갂 [ ab, ] 에서 -이고연속인함수 f 가 ( a, b) 미분가능하다고가정하자. 만일 f '( ) 0 이면역함수 f 은실수 f( ) 에서미분가능하고 ( f )'( f ( )) 이다. f '( ) 에서 증명 : 폐구갂 [ ab, ] 에서 -이고연속인함수 f 는증가함수이거나감소함수이다 (
제 3 강역함수의미분과로피탈의정리 역함수의미분 : 두실수 a b 와폐구갂 [ ab, ] 에서 -이고연속인함수 f 가 ( a, b) 미분가능하다고가정하자. 만일 f '( ) 0 이면역함수 f 은실수 f( ) 에서미분가능하고 ( f )'( f ( )) 이다. f '( ) 에서 증명 : 폐구갂 [ ab, ] 에서 -이고연속인함수 f 는증가함수이거나감소함수이다 (
FGB-P 학번수학과권혁준 2008 년 5 월 19 일 Lemma 1 p 를 C([0, 1]) 에속하는음수가되지않는함수라하자. 이때 y C 2 (0, 1) C([0, 1]) 가미분방정식 y (t) + p(t)y(t) = 0, t (0, 1), y(0)
![FGB-P 학번수학과권혁준 2008 년 5 월 19 일 Lemma 1 p 를 C([0, 1]) 에속하는음수가되지않는함수라하자. 이때 y C 2 (0, 1) C([0, 1]) 가미분방정식 y (t) + p(t)y(t) = 0, t (0, 1), y(0)](/thumbs/94/121635808.jpg "FGB-P 학번수학과권혁준 2008 년 5 월 19 일 Lemma 1 p 를 C([0, 1]) 에속하는음수가되지않는함수라하자. 이때 y C 2 (0, 1) C([0, 1]) 가미분방정식 y (t) + p(t)y(t) = 0, t (0, 1), y(0)") FGB-P8-3 8 학번수학과권혁준 8 년 5 월 9 일 Lemma p 를 C[, ] 에속하는음수가되지않는함수라하자. 이때 y C, C[, ] 가미분방정식 y t + ptyt, t,, y y 을만족하는해라고하면, y 는, 에서연속적인이계도함수를가지게확 장될수있다. Proof y 은 y 의도함수이므로미적분학의기본정리에의하여, y 은 y 의어떤원시 함수와적분상수의합으로표시될수있다.
FGB-P8-3 8 학번수학과권혁준 8 년 5 월 9 일 Lemma p 를 C[, ] 에속하는음수가되지않는함수라하자. 이때 y C, C[, ] 가미분방정식 y t + ptyt, t,, y y 을만족하는해라고하면, y 는, 에서연속적인이계도함수를가지게확 장될수있다. Proof y 은 y 의도함수이므로미적분학의기본정리에의하여, y 은 y 의어떤원시 함수와적분상수의합으로표시될수있다.
특허청구의 범위 청구항 1 제1 내지 제6 암이 각각의 관절부를 가지며 형성되며, 상기 제1 내지 제6 암 각각은 제1 내지 제6 링크에 의해 링크되고, 상기 제1 내지 제6 암 내부에는 각각의 암을 구동하는 구동모듈이 각각 내장되며, 상기 구동모듈 각각의 선단에는 1
 (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B25J 9/06 (2006.01) B25J 19/02 (2006.01) (21) 출원번호 10-2011-0079361 (22) 출원일자 2011년08월10일 심사청구일자 2011년08월10일 (65) 공개번호 10-2013-0017122 (43) 공개일자 2013년02월20일
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B25J 9/06 (2006.01) B25J 19/02 (2006.01) (21) 출원번호 10-2011-0079361 (22) 출원일자 2011년08월10일 심사청구일자 2011년08월10일 (65) 공개번호 10-2013-0017122 (43) 공개일자 2013년02월20일
3. 다음은카르노맵의표이다. 논리식을간략화한것은? < 나 > 4. 다음카르노맵을간략화시킨결과는? < >
 . 변수의수 ( 數 ) 가 3 이라면카르노맵에서몇개의칸이요구되는가? 2칸 나 4칸 다 6칸 8칸 < > 2. 다음진리표의카르노맵을작성한것중옳은것은? < 나 > 다 나 입력출력 Y - 2 - 3. 다음은카르노맵의표이다. 논리식을간략화한것은? < 나 > 4. 다음카르노맵을간략화시킨결과는? < > 2 2 2 2 2 2 2-3 - 5. 다음진리표를간략히한결과
. 변수의수 ( 數 ) 가 3 이라면카르노맵에서몇개의칸이요구되는가? 2칸 나 4칸 다 6칸 8칸 < > 2. 다음진리표의카르노맵을작성한것중옳은것은? < 나 > 다 나 입력출력 Y - 2 - 3. 다음은카르노맵의표이다. 논리식을간략화한것은? < 나 > 4. 다음카르노맵을간략화시킨결과는? < > 2 2 2 2 2 2 2-3 - 5. 다음진리표를간략히한결과
(72) 발명자 정종수 서울특별시 서대문구 모래내로 319, 101동 405호 (홍은동, 진흥아파트) 김정환 서울특별시 구로구 구로동로21길 7 (구로동) - 2 -
 발명자 정종수 서울특별시 서대문구 모래내로 319, 101동 405호 (홍은동, 진흥아파트) 김정환 서울특별시 구로구 구로동로21길 7 (구로동) - 2 -") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B01J 23/34 (2006.01) B01J 37/02 (2006.01) B01J 37/08 (2006.01) B01D 53/86 (2006.01) (21) 출원번호 10-2010-0098306 (22) 출원일자 2010년10월08일 심사청구일자 2010년10월08일
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B01J 23/34 (2006.01) B01J 37/02 (2006.01) B01J 37/08 (2006.01) B01D 53/86 (2006.01) (21) 출원번호 10-2010-0098306 (22) 출원일자 2010년10월08일 심사청구일자 2010년10월08일
등록특허 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 ( ) (21) 출원번호 (22) 출원일자 2011 년 12 월 28 일 심사
 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 ( ) (21) 출원번호 (22) 출원일자 2011 년 12 월 28 일 심사") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 (2006.01) (21) 출원번호 10-2011-0144999 (22) 출원일자 2011 년 12 월 28 일 심사청구일자 2011 년 12 월 28 일 (65) 공개번호 10-2013-0076416 (43) 공개일자 2013 년 07
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G01R 29/08 (2006.01) (21) 출원번호 10-2011-0144999 (22) 출원일자 2011 년 12 월 28 일 심사청구일자 2011 년 12 월 28 일 (65) 공개번호 10-2013-0076416 (43) 공개일자 2013 년 07
설계란 무엇인가?
 금오공과대학교 C++ 프로그래밍 jhhwang@kumoh.ac.kr 컴퓨터공학과 황준하 6 강. 함수와배열, 포인터, 참조목차 함수와포인터 주소값의매개변수전달 주소의반환 함수와배열 배열의매개변수전달 함수와참조 참조에의한매개변수전달 참조의반환 프로그래밍연습 1 /15 6 강. 함수와배열, 포인터, 참조함수와포인터 C++ 매개변수전달방법 값에의한전달 : 변수값,
금오공과대학교 C++ 프로그래밍 jhhwang@kumoh.ac.kr 컴퓨터공학과 황준하 6 강. 함수와배열, 포인터, 참조목차 함수와포인터 주소값의매개변수전달 주소의반환 함수와배열 배열의매개변수전달 함수와참조 참조에의한매개변수전달 참조의반환 프로그래밍연습 1 /15 6 강. 함수와배열, 포인터, 참조함수와포인터 C++ 매개변수전달방법 값에의한전달 : 변수값,
exp
 exp exp exp exp exp exp exp exp exp exp exp log 第 卷 第 號 39 4 2011 4 투영법을 이용한 터빈 블레이드의 크리프 특성 분석 329 성을 평가하였다 이를 위해 결정계수값인 값 을 비교하였으며 크리프 시험 결과를 곡선 접합 한 결과와 비선형 최소자승법으로 예측한 결과 사 이 결정계수간 정도의 오차가 발생하였고
exp exp exp exp exp exp exp exp exp exp exp log 第 卷 第 號 39 4 2011 4 투영법을 이용한 터빈 블레이드의 크리프 특성 분석 329 성을 평가하였다 이를 위해 결정계수값인 값 을 비교하였으며 크리프 시험 결과를 곡선 접합 한 결과와 비선형 최소자승법으로 예측한 결과 사 이 결정계수간 정도의 오차가 발생하였고
(72) 발명자 오승용 경기도안산시상록구오목로 11 길 45, 202 호 ( 본오동 ) 박영욱 경기도수원시권선구당진로 31 번길 16, 한라비발디 202 동 1201 호 ( 당수동 ) 고대화 경기도수원시권선구금호로 189 번길 82-12, 202 호 ( 구운동 ) 김준
 발명자 오승용 경기도안산시상록구오목로 11 길 45, 202 호 ( 본오동 ) 박영욱 경기도수원시권선구당진로 31 번길 16, 한라비발디 202 동 1201 호 ( 당수동 ) 고대화 경기도수원시권선구금호로 189 번길 82-12, 202 호 ( 구운동 ) 김준") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2013년06월24일 (11) 등록번호 10-1278021 (24) 등록일자 2013년06월18일 (51) 국제특허분류 (Int. Cl.) B65G 1/12 (2006.01) B65G 1/06 (2006.01) H01L 21/677 (2006.01) B25J 5/00 (2006.01)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2013년06월24일 (11) 등록번호 10-1278021 (24) 등록일자 2013년06월18일 (51) 국제특허분류 (Int. Cl.) B65G 1/12 (2006.01) B65G 1/06 (2006.01) H01L 21/677 (2006.01) B25J 5/00 (2006.01)
제49회 부산과학전람회
 작품번호 1507 출품분야학생부출품부문지구과학 2012. 07. 10 구분성명 출품학생 지도교사 윤정관 이경훈 그림 1> 전세계광해분포지도 (Globe at Night 포스터 ) - 1 - 그림 2> 우리나라의광해분포지도 (Cinzano et al., 2001) - 2 - - 3 - 그림 3> 광해에의한하늘밝아짐이천체관측에미치는영향 (Stellarium
작품번호 1507 출품분야학생부출품부문지구과학 2012. 07. 10 구분성명 출품학생 지도교사 윤정관 이경훈 그림 1> 전세계광해분포지도 (Globe at Night 포스터 ) - 1 - 그림 2> 우리나라의광해분포지도 (Cinzano et al., 2001) - 2 - - 3 - 그림 3> 광해에의한하늘밝아짐이천체관측에미치는영향 (Stellarium
Python과 함께 배우는 신호 해석 제 5 강. 복소수 연산 및 Python을 이용한 복소수 연산 (제 2 장. 복소수 기초)
") 제 5 강. 복소수연산및 을이용한복소수연산 ( 제 2 장. 복소수기초 ) 한림대학교전자공학과 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 1 배울내용 복소수의기본개념복소수의표현오일러 (Euler) 공식복소수의대수연산 1의 N 승근 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 2 복소수의 4 칙연산 복소수의덧셈과뺄셈에는직각좌표계표현을사용하고,
제 5 강. 복소수연산및 을이용한복소수연산 ( 제 2 장. 복소수기초 ) 한림대학교전자공학과 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 1 배울내용 복소수의기본개념복소수의표현오일러 (Euler) 공식복소수의대수연산 1의 N 승근 한림대학교 제 5 강. 복소수연산및 을이용한복소수연산 2 복소수의 4 칙연산 복소수의덧셈과뺄셈에는직각좌표계표현을사용하고,
특허청구의 범위 청구항 1 알람을 출력하기 위한 출력 인터페이스; 사용자의 안구전도값을 측정하기 위한 안구전도 측정부; 및 상기 안구전도 측정부가 측정한 안구전도값을 이용하여 사용자의 졸음 상태를 감지하고, 그에 따라 상기 출력 인터페이스로 알람을 출력하는 졸음상태 판
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) A61B 5/0496 (2006.01) A61B 5/18 (2006.01) (21) 출원번호 10-2009-0051767 (22) 출원일자 2009년06월11일 심사청구일자 2009년06월11일 (65) 공개번호 10-2010-0133070 (43) 공개일자 2010년12월21일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) A61B 5/0496 (2006.01) A61B 5/18 (2006.01) (21) 출원번호 10-2009-0051767 (22) 출원일자 2009년06월11일 심사청구일자 2009년06월11일 (65) 공개번호 10-2010-0133070 (43) 공개일자 2010년12월21일
차 례 4
 제 50 회전국과학전람회 2004. 07. 20 차 례 4 - 1 - 표 2. 천체의화각 표 1. 초점거리와화각 - 2 - 그림 1. 목성의표면구조 - 3 - 그림 2. 목성위성의상호현상 - 4 - π 공전속도 원궤도의반지름 π 그림 3. 케플러회전 - 5 - 표 3. 목성의궤도자료 표 4. 목성의물리자료 표 5. 4 대위성의궤도자료및물리자료 - 6 - 그림
제 50 회전국과학전람회 2004. 07. 20 차 례 4 - 1 - 표 2. 천체의화각 표 1. 초점거리와화각 - 2 - 그림 1. 목성의표면구조 - 3 - 그림 2. 목성위성의상호현상 - 4 - π 공전속도 원궤도의반지름 π 그림 3. 케플러회전 - 5 - 표 3. 목성의궤도자료 표 4. 목성의물리자료 표 5. 4 대위성의궤도자료및물리자료 - 6 - 그림
많이 이용하는 라면,햄버그,과자,탄산음료등은 무서운 병을 유발하고 비만의 원인 식품 이다. 8,등겨에 흘려 보낸 영양을 되 찾을 수 있다. 도정과정에서 등겨에 흘려 보낸 영양 많은 쌀눈과 쌀껍질의 영양을 등겨를 물에 우러나게하여 장시간 물에 담가 두어 영양을 되 찾는다
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) A23L 1/307 (2006.01) C02F 1/68 (2006.01) (21) 출원번호 20-2011-0002850 (22) 출원일자 2011년04월05일 심사청구일자 2011년04월05일 (11) 공개번호 20-2011-0004312 (43) 공개일자 2011년05월03일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개실용신안공보(U) A23L 1/307 (2006.01) C02F 1/68 (2006.01) (21) 출원번호 20-2011-0002850 (22) 출원일자 2011년04월05일 심사청구일자 2011년04월05일 (11) 공개번호 20-2011-0004312 (43) 공개일자 2011년05월03일
이 발명을 지원한 국가연구개발사업 과제고유번호 08921-01304 부처명 방송통신위원회 연구사업명 방송통신기술개발사업 연구과제명 안전한 전자파환경 조성 주관기관 한국전자통신연구원 연구기간 2008.01.01 ~ 2012.12.31-2 -
 (19) 대한민국특허청(KR) (12) 공개특허공보(A) (51) 국제특허분류(Int. Cl.) H05K 9/00 (2006.01) H04B 1/38 (2006.01) (21) 출원번호 10-2011-0134285 (22) 출원일자 2011년12월14일 심사청구일자 없음 기술이전 희망 : 기술양도, 실시권허여, 기술지도 전체 청구항 수 : 총 1 항 (54)
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (51) 국제특허분류(Int. Cl.) H05K 9/00 (2006.01) H04B 1/38 (2006.01) (21) 출원번호 10-2011-0134285 (22) 출원일자 2011년12월14일 심사청구일자 없음 기술이전 희망 : 기술양도, 실시권허여, 기술지도 전체 청구항 수 : 총 1 항 (54)
실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
학습목차 2.1 다차원배열이란 차원배열의주소와값의참조
 - Part2- 제 2 장다차원배열이란무엇인가 학습목차 2.1 다차원배열이란 2. 2 2 차원배열의주소와값의참조 2.1 다차원배열이란 2.1 다차원배열이란 (1/14) 다차원배열 : 2 차원이상의배열을의미 1 차원배열과다차원배열의비교 1 차원배열 int array [12] 행 2 차원배열 int array [4][3] 행 열 3 차원배열 int array [2][2][3]
- Part2- 제 2 장다차원배열이란무엇인가 학습목차 2.1 다차원배열이란 2. 2 2 차원배열의주소와값의참조 2.1 다차원배열이란 2.1 다차원배열이란 (1/14) 다차원배열 : 2 차원이상의배열을의미 1 차원배열과다차원배열의비교 1 차원배열 int array [12] 행 2 차원배열 int array [4][3] 행 열 3 차원배열 int array [2][2][3]
(Microsoft PowerPoint - \301\24608\260\255 - \261\244\277\370\260\372 \300\347\301\372)
") 게임엔진 제 8 강광원과재질 이대현교수 한국산업기술대학교게임공학과 학습목차 조명모델 광원의색상설정 재질 분산성분의이해 분산재질의구현 경반사성분의이해 경반사재질의구현 조명 (Illumination) 모델 조명모델 광원으로부터공간상의점들까지의조도를계산하는방법. 직접조명과전역조명 직접조명 (direct illumination) 모델 물체표면의점들이장면내의모든광원들로부터직접적으로받는빛만을고려.
게임엔진 제 8 강광원과재질 이대현교수 한국산업기술대학교게임공학과 학습목차 조명모델 광원의색상설정 재질 분산성분의이해 분산재질의구현 경반사성분의이해 경반사재질의구현 조명 (Illumination) 모델 조명모델 광원으로부터공간상의점들까지의조도를계산하는방법. 직접조명과전역조명 직접조명 (direct illumination) 모델 물체표면의점들이장면내의모든광원들로부터직접적으로받는빛만을고려.
항은 발명의 상세한 설명에는 그 발명이 속하는 기술분야에서 통상의 지식을 가진 자 (이하 통상의 기술자 라고 한다)가 용이하게 실시할 수 있을 정도로 그 발명의 목적 구성 및 효과를 기재하여야 한다고 규정하고 있다. 이는 특허출원된 발명의 내용을 제 3자가 명세서만으로
가 용이하게 실시할 수 있을 정도로 그 발명의 목적 구성 및 효과를 기재하여야 한다고 규정하고 있다. 이는 특허출원된 발명의 내용을 제 3자가 명세서만으로") 대 법 원 제 2 부 판 결 사 건 2013후518 권리범위확인(특) 원고, 상고인 코오롱인더스트리 주식회사 소송대리인 변리사 경진영 외 2인 피고, 피상고인 토요보 가부시키가이샤(변경 전: 토요 보세키 가부시키가이샤) 소송대리인 변호사 박성수 외 4인 원 심 판 결 특허법원 2013. 1. 25. 선고 2012허6700 판결 판 결 선 고 2015. 9.
대 법 원 제 2 부 판 결 사 건 2013후518 권리범위확인(특) 원고, 상고인 코오롱인더스트리 주식회사 소송대리인 변리사 경진영 외 2인 피고, 피상고인 토요보 가부시키가이샤(변경 전: 토요 보세키 가부시키가이샤) 소송대리인 변호사 박성수 외 4인 원 심 판 결 특허법원 2013. 1. 25. 선고 2012허6700 판결 판 결 선 고 2015. 9.
<4D F736F F F696E74202D2035BBF3C6F2C7FC5FBCF8BCF6B9B0C1FA2E BC8A3C8AF20B8F0B5E55D>
 5. 상평형 : 순수물질 이광남 5. 상평형 : 순수물질 상전이 phase transition 서론 ~ 조성의변화없는상변화 5. 상평형 : 순수물질 전이열역학 5. 안정성조건 G ng ng n G G 자발적변화 G < 0 G > G or 물질은가장낮은몰Gibbs 에너지를갖는상 가장안정한상 으로변화하려는경향 5. 상평형 : 순수물질 3 5. 압력에따른Gibbs
5. 상평형 : 순수물질 이광남 5. 상평형 : 순수물질 상전이 phase transition 서론 ~ 조성의변화없는상변화 5. 상평형 : 순수물질 전이열역학 5. 안정성조건 G ng ng n G G 자발적변화 G < 0 G > G or 물질은가장낮은몰Gibbs 에너지를갖는상 가장안정한상 으로변화하려는경향 5. 상평형 : 순수물질 3 5. 압력에따른Gibbs
도 1 명세서 도면의 간단한 설명 도 1은 본 발명의 일실시예에 따른 비접촉 USB 리더기의 블럭도를 나타낸다. 도 2는 도 1의 비접촉 USB 리더기를 이용한 인프라 구축 시스템의 개략도를 나타낸다. 도 3은 도 1의 비접촉 USB 리더기를 이용한 이용 방법에 대한
 (51) Int. Cl. G06K 7/00 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월01일 10-0639964 2006년10월24일 (21) 출원번호 10-2004-0077732 (65) 공개번호 10-2006-0028855 (22) 출원일자 2004년09월30일
(51) Int. Cl. G06K 7/00 (2006.01) (19)대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 (11) 등록번호 (24) 등록일자 2006년11월01일 10-0639964 2006년10월24일 (21) 출원번호 10-2004-0077732 (65) 공개번호 10-2006-0028855 (22) 출원일자 2004년09월30일
특허청구의 범위 청구항 1 일반전화를 이용한 위험 알림시스템 및 실시간 영상전송 장치에서 CID(콜백넘버) 장치를 포함한 서버 및 그 장 비를 포함하며, 영상서버와 연동한 형태를 상황실에 전송하여 출동하는 시스템을 포함하는 것을 특징으로 하는 일반전화를 이용한 위험 알
 장치를 포함한 서버 및 그 장 비를 포함하며, 영상서버와 연동한 형태를 상황실에 전송하여 출동하는 시스템을 포함하는 것을 특징으로 하는 일반전화를 이용한 위험 알") (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2014-0008486 (43) 공개일자 2014년01월21일 (51) 국제특허분류(Int. Cl.) G08B 25/08 (2014.01) G08B 21/02 (2006.01) G08B 13/196 (2006.01) (21) 출원번호 10-2012-0075069 (22) 출원일자
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2014-0008486 (43) 공개일자 2014년01월21일 (51) 국제특허분류(Int. Cl.) G08B 25/08 (2014.01) G08B 21/02 (2006.01) G08B 13/196 (2006.01) (21) 출원번호 10-2012-0075069 (22) 출원일자
(71) 출원인 나혜원 대구 달서구 도원동 1438 대곡사계절타운 305-1502 나혜리 대구 달서구 도원동 1438 대곡사계절타운 305-1502 (72) 발명자 나혜원 대구 달서구 도원동 1438 대곡사계절타운 305-1502 나혜리 대구 달서구 도원동 1438 대
 출원인 나혜원 대구 달서구 도원동 1438 대곡사계절타운 305-1502 나혜리 대구 달서구 도원동 1438 대곡사계절타운 305-1502 (72) 발명자 나혜원 대구 달서구 도원동 1438 대곡사계절타운 305-1502 나혜리 대구 달서구 도원동 1438 대") (51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) E02D 17/20 (2006.01) E02B 3/12 (2006.01) E02D 3/10 (2006.01) (21) 출원번호 10-2008-0131302 (22) 출원일자 2008년12월22일 심사청구일자 전체 청구항 수 : 총 4 항 (54) 제직형 지오셀 2008년12월22일
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) E02D 17/20 (2006.01) E02B 3/12 (2006.01) E02D 3/10 (2006.01) (21) 출원번호 10-2008-0131302 (22) 출원일자 2008년12월22일 심사청구일자 전체 청구항 수 : 총 4 항 (54) 제직형 지오셀 2008년12월22일
특허청구의범위청구항 1 물을여과하는필터부 ; 상기필터부에물을유동시키는정수관 ; 상기정수관에설치되고, 상기정수관의수류를이용하여전기를발생시키는발전모듈 ; 및상기정수관에배치되고, 상기발전모듈에서발생된전기가공급되고, 상기정수관을따라유동되는정수를전기분해하여살균하는살균모듈 ; 을
 (51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) B01D 35/00 (2006.01) C02F 1/461 (2006.01) C02F 1/467 (2006.01) (21) 출원번호 10-2009-0019000 (22) 출원일자 2009 년 03 월 05 일 심사청구일자 없음 전체청구항수 : 총 4 항 (54) 정수기 (11)
(51) Int. Cl. (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) B01D 35/00 (2006.01) C02F 1/461 (2006.01) C02F 1/467 (2006.01) (21) 출원번호 10-2009-0019000 (22) 출원일자 2009 년 03 월 05 일 심사청구일자 없음 전체청구항수 : 총 4 항 (54) 정수기 (11)
명세서청구범위청구항 1 중소하천의평저수시유량을측정하는유량측정방법에있어서, a) 측량원점에서하천변에특정한기준지점을지정하고, 측량기를사용하여상기기준지점을시준하는선을기준선으로하여그각도와상기측량원점과의거리를측정하는단계 ; b) 상기기준선을측량각 0도로설정하는단계 ; c) 하천
 측량원점에서하천변에특정한기준지점을지정하고, 측량기를사용하여상기기준지점을시준하는선을기준선으로하여그각도와상기측량원점과의거리를측정하는단계 ; b) 상기기준선을측량각 0도로설정하는단계 ; c) 하천") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2015년08월13일 (11) 등록번호 10-1544147 (24) 등록일자 2015년08월06일 (51) 국제특허분류 (Int. Cl.) G01C 13/00 (2006.01) G01C 1/00 (2006.01) G01C 3/00 (2006.01) G01F 9/00 (2006.01)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (45) 공고일자 2015년08월13일 (11) 등록번호 10-1544147 (24) 등록일자 2015년08월06일 (51) 국제특허분류 (Int. Cl.) G01C 13/00 (2006.01) G01C 1/00 (2006.01) G01C 3/00 (2006.01) G01F 9/00 (2006.01)
대 표 도 - 2 -
 (19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2013-0062307 (43) 공개일자 2013년06월12일 (51) 국제특허분류(Int. Cl.) G06Q 30/02 (2012.01) (21) 출원번호 10-2013-0053925(분할) (22) 출원일자 2013년05월13일 심사청구일자 2013년05월13일 (62) 원출원
(19) 대한민국특허청(KR) (12) 공개특허공보(A) (11) 공개번호 10-2013-0062307 (43) 공개일자 2013년06월12일 (51) 국제특허분류(Int. Cl.) G06Q 30/02 (2012.01) (21) 출원번호 10-2013-0053925(분할) (22) 출원일자 2013년05월13일 심사청구일자 2013년05월13일 (62) 원출원
Resampling Methods
 Resampling Methds 박창이 서울시립대학교통계학과 박창이 ( 서울시립대학교통계학과 ) Resampling Methds 1 / 18 학습내용 개요 CV(crss-validatin) 검증오차 LOOCV(leave-ne-ut crss-validatin) k-fld CV 편의-분산의관계분류문제에서의 CV Btstrap 박창이 ( 서울시립대학교통계학과 )
Resampling Methds 박창이 서울시립대학교통계학과 박창이 ( 서울시립대학교통계학과 ) Resampling Methds 1 / 18 학습내용 개요 CV(crss-validatin) 검증오차 LOOCV(leave-ne-ut crss-validatin) k-fld CV 편의-분산의관계분류문제에서의 CV Btstrap 박창이 ( 서울시립대학교통계학과 )
Kalman Filter 로 IMU 와 GPS 결합 지구자전효과와중력모델을고려하지않은 INS 설계 KITECH 양광웅작성 관성항법시스템 (INS, Inertial Navigation System) 은 vehicle의초기위치로부터자이로와가속도센서의각속도와가속도를적분하여현
 은 vehicle의초기위치로부터자이로와가속도센서의각속도와가속도를적분하여현") Kalma Filter 로 IMU 와 결합 지구자전효과와중력모델을고려하지않은 INS 설계 KIECH 양광웅작성 관성항법시스템 (INS, Iertial Naiatio Sstem) 은 ehicle의초기위치로부터자이로와가속도센서의각속도와가속도를적분하여현재 ehicle의자세와속도, 위치를계산한다. 는 INS 시스템을단순화하여지구자전효과와중력모델을고려하지않는다. 그리고자세를계산하기위하여
Kalma Filter 로 IMU 와 결합 지구자전효과와중력모델을고려하지않은 INS 설계 KIECH 양광웅작성 관성항법시스템 (INS, Iertial Naiatio Sstem) 은 ehicle의초기위치로부터자이로와가속도센서의각속도와가속도를적분하여현재 ehicle의자세와속도, 위치를계산한다. 는 INS 시스템을단순화하여지구자전효과와중력모델을고려하지않는다. 그리고자세를계산하기위하여
OCW_C언어 기초
 초보프로그래머를위한 C 언어기초 4 장 : 연산자 2012 년 이은주 학습목표 수식의개념과연산자및피연산자에대한학습 C 의알아보기 연산자의우선순위와결합방향에대하여알아보기 2 목차 연산자의기본개념 수식 연산자와피연산자 산술연산자 / 증감연산자 관계연산자 / 논리연산자 비트연산자 / 대입연산자연산자의우선순위와결합방향 조건연산자 / 형변환연산자 연산자의우선순위 연산자의결합방향
초보프로그래머를위한 C 언어기초 4 장 : 연산자 2012 년 이은주 학습목표 수식의개념과연산자및피연산자에대한학습 C 의알아보기 연산자의우선순위와결합방향에대하여알아보기 2 목차 연산자의기본개념 수식 연산자와피연산자 산술연산자 / 증감연산자 관계연산자 / 논리연산자 비트연산자 / 대입연산자연산자의우선순위와결합방향 조건연산자 / 형변환연산자 연산자의우선순위 연산자의결합방향
(001~006)개념RPM3-2(부속)
개념RPM3-2(부속)") www.imth.tv - (~9)개념RPM-(본문).. : PM RPM - 대푯값 페이지 다민 PI LPI 알피엠 대푯값과산포도 유형 ⑴ 대푯값 자료 전체의 중심적인 경향이나 특징을 하나의 수로 나타낸 값 ⑵ 평균 (평균)= Ⅰ 통계 (변량)의 총합 (변량의 개수) 개념플러스 대푯값에는 평균, 중앙값, 최 빈값 등이 있다. ⑶ 중앙값 자료를 작은 값부터 크기순으로
www.imth.tv - (~9)개념RPM-(본문).. : PM RPM - 대푯값 페이지 다민 PI LPI 알피엠 대푯값과산포도 유형 ⑴ 대푯값 자료 전체의 중심적인 경향이나 특징을 하나의 수로 나타낸 값 ⑵ 평균 (평균)= Ⅰ 통계 (변량)의 총합 (변량의 개수) 개념플러스 대푯값에는 평균, 중앙값, 최 빈값 등이 있다. ⑶ 중앙값 자료를 작은 값부터 크기순으로
특허청구의 범위 청구항 1 맨홀 일부분에 관통되게 결합되는 맨홀결합구와; 상기 맨홀결합구의 전방에 연통되게 형성되어 토양속에 묻히게 설치되고, 외주면에는 지하수가 유입될 수 있는 다수의 통공이 관통 형성된 지하수유입구와; 상기 맨홀결합구의 후방에 연통되고 수직으로 세워
 (51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) G01F 23/02 (2006.01) G01F 23/00 (2006.01) (21) 출원번호 10-2007-0096769 (22) 출원일자 2007년09월21일 심사청구일자 전체 청구항 수 : 총 5 항 (54) 지하수위 관측장치 2007년09월21일 (11) 공개번호 10-2009-0031004
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 공개특허공보(A) G01F 23/02 (2006.01) G01F 23/00 (2006.01) (21) 출원번호 10-2007-0096769 (22) 출원일자 2007년09월21일 심사청구일자 전체 청구항 수 : 총 5 항 (54) 지하수위 관측장치 2007년09월21일 (11) 공개번호 10-2009-0031004
1 peaieslvfp3 1. 두점사이의거리 수직선위의두점사이의거리를구할수있다. 좌표평면위의두점사이의거리를구할수있다. 수직선위의두점사이의거리 todrkrgo qhqtlek 오른쪽그림은충무로역을중심으로한서울시지하철 3`호선노선도의일부분이다. 충무로역을` 0, 을지로 3`
 peaieslvfp. 두점사이의거리 수직선위의두점사이의거리를구할수있다. 좌표평면위의두점사이의거리를구할수있다. 수직선위의두점사이의거리 todrkrgo qhqtlek 오른쪽그림은충무로역을중심으로한서울시지하철 `호선노선도의일부분이다. 충무로역을` 0, 을지로 `가역을 ``로나타낼때, 다음물음에답하여라. 독립문 경복궁 안국종로 가을지로 가충무로동대입구약수금호옥수압구정잠원신사
peaieslvfp. 두점사이의거리 수직선위의두점사이의거리를구할수있다. 좌표평면위의두점사이의거리를구할수있다. 수직선위의두점사이의거리 todrkrgo qhqtlek 오른쪽그림은충무로역을중심으로한서울시지하철 `호선노선도의일부분이다. 충무로역을` 0, 을지로 `가역을 ``로나타낼때, 다음물음에답하여라. 독립문 경복궁 안국종로 가을지로 가충무로동대입구약수금호옥수압구정잠원신사
(Microsoft PowerPoint - Ch19_NumAnalysis.ppt [\310\243\310\257 \270\360\265\345])
![(Microsoft PowerPoint - Ch19_NumAnalysis.ppt [\310\243\310\257 \270\360\265\345])](/thumbs/82/85170746.jpg "(Microsoft PowerPoint - Ch19_NumAnalysis.ppt [\310\243\310\257 \270\360\265\345])") 수치해석 6009 Ch9. Numerical Itegratio Formulas Part 5. 소개 / 미적분 미분 : 독립변수에대한종속변수의변화율 d vt yt dt yt 임의의물체의시간에따른위치, vt 속도 함수의구배 적분 : 미분의역, 어떤구간내에서시간 / 공간에따라변화하는정보를합하여전체결과를구함. t yt vt dt 0 에서 t 까지의구간에서곡선 vt
수치해석 6009 Ch9. Numerical Itegratio Formulas Part 5. 소개 / 미적분 미분 : 독립변수에대한종속변수의변화율 d vt yt dt yt 임의의물체의시간에따른위치, vt 속도 함수의구배 적분 : 미분의역, 어떤구간내에서시간 / 공간에따라변화하는정보를합하여전체결과를구함. t yt vt dt 0 에서 t 까지의구간에서곡선 vt
(52) CPC 특허분류 B64D 47/08 ( ) G01R 29/0878 ( ) G01R 29/0892 ( ) G03B 15/003 ( ) G05D 1/085 ( ) G08B 21/182 ( ) G08B
 CPC 특허분류 B64D 47/08 ( ) G01R 29/0878 ( ) G01R 29/0892 ( ) G03B 15/003 ( ) G05D 1/085 ( ) G08B 21/182 ( ) G08B") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04N 5/232 (2006.01) B64C 13/16 (2006.01) B64D 47/08 (2006.01) G01R 29/08 (2006.01) G03B 15/00 (2006.01) G05D 1/08 (2006.01) G08B 21/18 (2006.01)
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) H04N 5/232 (2006.01) B64C 13/16 (2006.01) B64D 47/08 (2006.01) G01R 29/08 (2006.01) G03B 15/00 (2006.01) G05D 1/08 (2006.01) G08B 21/18 (2006.01)
statistics
 수치를이용한자료요약 statistics hmkang@hallym.ac.kr 한림대학교 통계학 강희모 ( 한림대학교 ) 수치를이용한자료요약 1 / 26 수치를 통한 자료의 요약 요약 방대한 자료를 몇 개의 의미있는 수치로 요약 자료의 분포상태를 알 수 있는 통계기법 사용 중심위치의 측도(measure of center) : 어떤 값을 중심으로 분포되어 있는지
수치를이용한자료요약 statistics hmkang@hallym.ac.kr 한림대학교 통계학 강희모 ( 한림대학교 ) 수치를이용한자료요약 1 / 26 수치를 통한 자료의 요약 요약 방대한 자료를 몇 개의 의미있는 수치로 요약 자료의 분포상태를 알 수 있는 통계기법 사용 중심위치의 측도(measure of center) : 어떤 값을 중심으로 분포되어 있는지
표본재추출(resampling) 방법
 방법") 표본재추출 (resampling) 방법 박창이 서울시립대학교통계학과 박창이 ( 서울시립대학교통계학과 ) 표본재추출 (resampling) 방법 1 / 18 학습내용 개요 CV(crss-validatin) 검증오차 LOOCV(leave-ne-ut crss-validatin) k-fld CV 편의-분산의관계분류문제에서의 CV Btstrap 박창이 ( 서울시립대학교통계학과
표본재추출 (resampling) 방법 박창이 서울시립대학교통계학과 박창이 ( 서울시립대학교통계학과 ) 표본재추출 (resampling) 방법 1 / 18 학습내용 개요 CV(crss-validatin) 검증오차 LOOCV(leave-ne-ut crss-validatin) k-fld CV 편의-분산의관계분류문제에서의 CV Btstrap 박창이 ( 서울시립대학교통계학과
(72) 발명자 김현태 부산광역시수영구광안 2 동 SK 뷰아파트 김규영 부산광역시동래구온천 동 803 호 이발명을지원한국가연구개발사업 과제고유번호 B 부처명 지식경제부 연구사업명 정보통신기반구축사
 발명자 김현태 부산광역시수영구광안 2 동 SK 뷰아파트 김규영 부산광역시동래구온천 동 803 호 이발명을지원한국가연구개발사업 과제고유번호 B 부처명 지식경제부 연구사업명 정보통신기반구축사") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) G06T 7/20 (2006.01) (21) 출원번호 10-2011-0125814 (22) 출원일자 2011 년 11 월 29 일 심사청구일자 전체청구항수 : 총 5 항 2011 년 11 월 29 일 (54) 발명의명칭터널유고시스템의객체인식방법 (11) 공개번호
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) G06T 7/20 (2006.01) (21) 출원번호 10-2011-0125814 (22) 출원일자 2011 년 11 월 29 일 심사청구일자 전체청구항수 : 총 5 항 2011 년 11 월 29 일 (54) 발명의명칭터널유고시스템의객체인식방법 (11) 공개번호
외국인투자유치성과평가기준개발
 2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
Microsoft Word - SDSw doc
 MIDAS/SDS Ver..4.0 기술자료 Design>Shear Check Result KCI-USD99의슬래브의불균형모멘트에대한고려기준은다음과같습니다. 7.11. 전단편심설계 (1) 슬래브의평면에수직한위험단면의도심에대해전단편심에의해전달된다고보아야할불균형모멘트의비율은다음과같다. γ υ 1 = 1 b 1+ 3 b 1 () 전단편심에의한모멘트전달로인한전단응력은위의
MIDAS/SDS Ver..4.0 기술자료 Design>Shear Check Result KCI-USD99의슬래브의불균형모멘트에대한고려기준은다음과같습니다. 7.11. 전단편심설계 (1) 슬래브의평면에수직한위험단면의도심에대해전단편심에의해전달된다고보아야할불균형모멘트의비율은다음과같다. γ υ 1 = 1 b 1+ 3 b 1 () 전단편심에의한모멘트전달로인한전단응력은위의
<4D F736F F D20BDC3B0E8BFADBAD0BCAE20C1A B0AD5FBCF6C1A45FB0E8B7AEB0E6C1A6C7D E646F63>
 제 3 강계량경제학 Review Par I. 단순회귀모형 I. 계량경제학 A. 계량경제학 (Economerics 이란? i. 경제적이론이설명하는경제변수들간의관계를경제자료를바탕으로통 계적으로추정 (esimaion 고검정 (es 하는학문 거시소비함수 (Keynse. C=f(Y, 0
제 3 강계량경제학 Review Par I. 단순회귀모형 I. 계량경제학 A. 계량경제학 (Economerics 이란? i. 경제적이론이설명하는경제변수들간의관계를경제자료를바탕으로통 계적으로추정 (esimaion 고검정 (es 하는학문 거시소비함수 (Keynse. C=f(Y, 0

태에서미리정한시간에따라파지력을변화시킬때, 상기미리정한시간에따라검출되는제 2 생체신호에대한특징벡터인제 2 시너지벡터와, 상기제 2 생체신호를상기제 2 생체신호에대응되는파지력정보로변환시킬수있는변환행렬을상기분류자세별로저장하여포함하고있는자세정보저장부와, 상기제 1 시너지벡터와
 (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) B25J 9/16 (2006.01) B25J 13/08 (2006.01) (21) 출원번호 10-2014-0184773 (22) 출원일자 2014 년 12 월 19 일 심사청구일자 전체청구항수 : 총 7 항 2014 년 12 월 19 일 (54) 발명의명칭파지자세및파지력을추정하는장치
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) B25J 9/16 (2006.01) B25J 13/08 (2006.01) (21) 출원번호 10-2014-0184773 (22) 출원일자 2014 년 12 월 19 일 심사청구일자 전체청구항수 : 총 7 항 2014 년 12 월 19 일 (54) 발명의명칭파지자세및파지력을추정하는장치
명세서청구범위청구항 1 일단이아래로경사지게형성되고타단의측면은제 1 링크 (11) 및제 2 링크 (12) 를갖는원형링크 (13) 의상기제 2 링크에연결되고상기원형링크를매개로회전가능한사용자의안착을위한좌석 (10); 일단이상기좌석의일단과상응하게아래로경사지게형성되고제 3 링크
 및제 2 링크 (12) 를갖는원형링크 (13) 의상기제 2 링크에연결되고상기원형링크를매개로회전가능한사용자의안착을위한좌석 (10); 일단이상기좌석의일단과상응하게아래로경사지게형성되고제 3 링크") (19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) A61G 5/14 (2006.01) A47C 7/62 (2006.01) (21) 출원번호 10-2014-0162951 (22) 출원일자 2014 년 11 월 20 일 심사청구일자 전체청구항수 : 총 6 항 2016 년 05 월 19 일 (11) 공개번호 10-2016-0060891
(19) 대한민국특허청 (KR) (12) 공개특허공보 (A) (51) 국제특허분류 (Int. Cl.) A61G 5/14 (2006.01) A47C 7/62 (2006.01) (21) 출원번호 10-2014-0162951 (22) 출원일자 2014 년 11 월 20 일 심사청구일자 전체청구항수 : 총 6 항 2016 년 05 월 19 일 (11) 공개번호 10-2016-0060891
Open GL
 Graphics Basic Windows & OpenGL Programming 컴퓨터그래픽스연구실 OpenGL 관련참고사이트 OpenGL 공식사이트 http://www.opengl.org/ Khronos Group http://www.khronos.org/ Nehe Productions http://nehe.gamedev.net/ OpenGL 파일설정 압축을푼후다음경로로파일을복사
Graphics Basic Windows & OpenGL Programming 컴퓨터그래픽스연구실 OpenGL 관련참고사이트 OpenGL 공식사이트 http://www.opengl.org/ Khronos Group http://www.khronos.org/ Nehe Productions http://nehe.gamedev.net/ OpenGL 파일설정 압축을푼후다음경로로파일을복사

특허청구의범위청구항 1 복수개의파장대역중적어도하나이상의파장대역의영상인카메라영상을획득하는카메라부 ; 상기카메라영상으로부터배경영역을제거하여표적영역을추출하는전처리부 ; 상기표적영역에서특징파라미터를추출하는특징파라미터추출부 ; 상기특징파라미터를정보화한형상화데이터를생성하는형상화데
 (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 5/00 (2006.01) G06T 7/00 (2006.01) H04N 9/67 (2006.01) (21) 출원번호 10-2012-0013080 (22) 출원일자 2012 년 02 월 09 일 심사청구일자 (56) 선행기술조사문헌 JP2005286577
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) G06T 5/00 (2006.01) G06T 7/00 (2006.01) H04N 9/67 (2006.01) (21) 출원번호 10-2012-0013080 (22) 출원일자 2012 년 02 월 09 일 심사청구일자 (56) 선행기술조사문헌 JP2005286577
1-1. (, 2013). A-C:, D:.,.,,.,. 1 (,, ), 2,
. A-C:, D:.,.,,.,. 1 (,, ), 2,") Ⅱ. 1 1,. UN (Intergovernmental Panel on Climate Change: IPCC, 2001) 3 21 88cm.. 1.3%, 149 (, 2002).,. 70% (Zhang et al., 2004). 86% 100 (Galgano et al., 2004), (Moore et al., 1999, Morton and McKenna,
Ⅱ. 1 1,. UN (Intergovernmental Panel on Climate Change: IPCC, 2001) 3 21 88cm.. 1.3%, 149 (, 2002).,. 70% (Zhang et al., 2004). 86% 100 (Galgano et al., 2004), (Moore et al., 1999, Morton and McKenna,
(72) 발명자 최종무 경기도 용인시 수지구 죽전동 단국대학교 컴퓨터학 과 김은삼 서울시 마포구 상수동 72-1 홍익대학교 컴퓨터공학 과 T동708호 현철승 서울시 동대문구 전농동 90 서울시립대학교 공과대 학 컴퓨터과학부 오용석 경기도 과천시 과천동 152-3 - 2
 발명자 최종무 경기도 용인시 수지구 죽전동 단국대학교 컴퓨터학 과 김은삼 서울시 마포구 상수동 72-1 홍익대학교 컴퓨터공학 과 T동708호 현철승 서울시 동대문구 전농동 90 서울시립대학교 공과대 학 컴퓨터과학부 오용석 경기도 과천시 과천동 152-3 - 2") (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2010년07월16일 (11) 등록번호 10-0970537 (24) 등록일자 2010년07월08일 (51) Int. Cl. G06F 12/06 (2006.01) G06F 12/02 (2006.01) G06F 12/00 (2006.01) (21) 출원번호 10-2008-0115607
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (45) 공고일자 2010년07월16일 (11) 등록번호 10-0970537 (24) 등록일자 2010년07월08일 (51) Int. Cl. G06F 12/06 (2006.01) G06F 12/02 (2006.01) G06F 12/00 (2006.01) (21) 출원번호 10-2008-0115607
 - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - [ 513] 이륜자동차의제동능력기준 (6714 ㆍ 12 22 ) 1.. (): ( ) ( ) ( km /h) (m) (m/s 2 ) ( km /h) (m) (m/s 2 ) (N) ) 1. V: ( km /h) 60(40) 90 0.1V+0.0087V 2 (0.1V+0.0143V 2
- 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - [ 513] 이륜자동차의제동능력기준 (6714 ㆍ 12 22 ) 1.. (): ( ) ( ) ( km /h) (m) (m/s 2 ) ( km /h) (m) (m/s 2 ) (N) ) 1. V: ( km /h) 60(40) 90 0.1V+0.0087V 2 (0.1V+0.0143V 2
(b) 연산증폭기슬루율측정회로 (c) 연산증폭기공통모드제거비측정회로 그림 1.1. 연산증폭기성능파라미터측정회로
 연산증폭기슬루율측정회로 (c) 연산증폭기공통모드제거비측정회로 그림 1.1. 연산증폭기성능파라미터측정회로") Lab. 1. I-V Characteristics of a Diode Lab. 1. 연산증폭기특성실험 1. 실험목표 연산증폭기의전압이득 (Gain), 입력저항, 출력저항, 대역폭 (Bandwidth), 오프셋전압 (Offset Voltage), 공통모드제거비 (Common-mode Rejection Ratio; CMRR) 및슬루율 (Slew Rate) 등의기본적인성능파라미터에대해서실험을통해서이해
Lab. 1. I-V Characteristics of a Diode Lab. 1. 연산증폭기특성실험 1. 실험목표 연산증폭기의전압이득 (Gain), 입력저항, 출력저항, 대역폭 (Bandwidth), 오프셋전압 (Offset Voltage), 공통모드제거비 (Common-mode Rejection Ratio; CMRR) 및슬루율 (Slew Rate) 등의기본적인성능파라미터에대해서실험을통해서이해
<3235B0AD20BCF6BFADC0C720B1D8C7D120C2FC20B0C5C1FE20322E687770>
 25 강. 수열의극한참거짓 2 두수열 { }, {b n } 의극한에대한 < 보기 > 의설명중옳은것을모두고르면? Ⅰ. < b n 이고 lim = 이면 lim b n =이다. Ⅱ. 두수열 { }, {b n } 이수렴할때 < b n 이면 lim < lim b n 이다. Ⅲ. lim b n =0이면 lim =0또는 lim b n =0이다. Ⅰ 2Ⅱ 3Ⅲ 4Ⅰ,Ⅱ 5Ⅰ,Ⅲ
25 강. 수열의극한참거짓 2 두수열 { }, {b n } 의극한에대한 < 보기 > 의설명중옳은것을모두고르면? Ⅰ. < b n 이고 lim = 이면 lim b n =이다. Ⅱ. 두수열 { }, {b n } 이수렴할때 < b n 이면 lim < lim b n 이다. Ⅲ. lim b n =0이면 lim =0또는 lim b n =0이다. Ⅰ 2Ⅱ 3Ⅲ 4Ⅰ,Ⅱ 5Ⅰ,Ⅲ
사진 24 _ 종루지 전경(서북에서) 사진 25 _ 종루지 남측기단(동에서) 사진 26 _ 종루지 북측기단(서에서) 사진 27 _ 종루지 1차 건물지 초석 적심석 사진 28 _ 종루지 중심 방형적심 유 사진 29 _ 종루지 동측 계단석 <경루지> 위 치 탑지의 남북중심
 사진 25 _ 종루지 남측기단(동에서) 사진 26 _ 종루지 북측기단(서에서) 사진 27 _ 종루지 1차 건물지 초석 적심석 사진 28 _ 종루지 중심 방형적심 유 사진 29 _ 종루지 동측 계단석 <경루지> 위 치 탑지의 남북중심") 하 출 입 시 설 형태 및 특징 제2차 시기 : 건물 4면 중앙에 각각 1개소씩 존재 - 남, 서, 북면의 기단 중앙에서는 계단지의 흔적이 뚜렷이 나타났으며 전면과 측면의 중앙칸에 위치 - 동서 기단 중앙에서는 계단 유인 계단우석( 階 段 隅 石 ) 받침지대석이 발견 - 계단너비는 동측면에서 발견된 계단우석 지대석의 크기와 위치를 근거로 약 2.06m - 면석과
하 출 입 시 설 형태 및 특징 제2차 시기 : 건물 4면 중앙에 각각 1개소씩 존재 - 남, 서, 북면의 기단 중앙에서는 계단지의 흔적이 뚜렷이 나타났으며 전면과 측면의 중앙칸에 위치 - 동서 기단 중앙에서는 계단 유인 계단우석( 階 段 隅 石 ) 받침지대석이 발견 - 계단너비는 동측면에서 발견된 계단우석 지대석의 크기와 위치를 근거로 약 2.06m - 면석과
전자회로 실험
 전자회로실험 2 조 고주현허영민 BJT의고정바이어스및 부품 * 실험목적 1) 고정바이어스와 회로의직류동작점을결정한다. 다이오드의특성 * 실험장비 계측장비 - Digital Multi Meter 부품 -저항 다이오드의특성 부품 - 트랜지스터
전자회로실험 2 조 고주현허영민 BJT의고정바이어스및 부품 * 실험목적 1) 고정바이어스와 회로의직류동작점을결정한다. 다이오드의특성 * 실험장비 계측장비 - Digital Multi Meter 부품 -저항 다이오드의특성 부품 - 트랜지스터
Microsoft Word - 5장_보&골조.doc
 5. 보와골조 : 전단력과휨모멘트 (Beams and Frames: Shear forces and bending moments) 수업목적 : 평면상에서하중을받는보와골조에발생하는내력과모 멘트계산에필요한해석기법을이해하고습득. 수업내용 : 전단력도와모멘트도 하중, 전단력, 휨모멘트사이의관계 정성적처짐형상 평면골조의정적정정, 부정정, 불안정 평면골조의해석 Lecture
5. 보와골조 : 전단력과휨모멘트 (Beams and Frames: Shear forces and bending moments) 수업목적 : 평면상에서하중을받는보와골조에발생하는내력과모 멘트계산에필요한해석기법을이해하고습득. 수업내용 : 전단력도와모멘트도 하중, 전단력, 휨모멘트사이의관계 정성적처짐형상 평면골조의정적정정, 부정정, 불안정 평면골조의해석 Lecture
(72) 발명자경진호대전유성구지족동열매마을아파트 박찬훈대전서구둔산동크로바아파트 101동 201호 박동일 대전유성구지족동열매마을아파트 101 동 1401 호 이발명을지원한국가연구개발사업 과제고유번호 MO1940 부처명 지식경제부 연구사업명 지경부-국가연구
 발명자경진호대전유성구지족동열매마을아파트 박찬훈대전서구둔산동크로바아파트 101동 201호 박동일 대전유성구지족동열매마을아파트 101 동 1401 호 이발명을지원한국가연구개발사업 과제고유번호 MO1940 부처명 지식경제부 연구사업명 지경부-국가연구") (19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B25J 13/08 (2006.01) B25J 9/16 (2006.01) B25J 15/00 (2006.01) (21) 출원번호 10-2012-0028017 (22) 출원일자 2012 년 03 월 20 일 심사청구일자 (56) 선행기술조사문헌 JP2002264059
(19) 대한민국특허청 (KR) (12) 등록특허공보 (B1) (51) 국제특허분류 (Int. Cl.) B25J 13/08 (2006.01) B25J 9/16 (2006.01) B25J 15/00 (2006.01) (21) 출원번호 10-2012-0028017 (22) 출원일자 2012 년 03 월 20 일 심사청구일자 (56) 선행기술조사문헌 JP2002264059
.4 편파 편파 전파방향에수직인평면의주어진점에서시간의함수로 벡터의모양과궤적을나타냄. 편파상태 polriion s 타원편파 llipill polrid: 가장일반적인경우 의궤적은타원 원형편파 irulr polrid 선형편파 linr polrid k k 복소량 편파는 와 의
 lrognis II 전자기학 제 장 : 전자파의전파 Prof. Young Cul L 초고주파시스템집적연구실 Advnd RF Ss Ingrion ARSI Lb p://s.u..kr/iuniv/usr/rfsil/ Advnd RF Ss Ingrion ARSI Lb. Young Cul L .4 편파 편파 전파방향에수직인평면의주어진점에서시간의함수로 벡터의모양과궤적을나타냄.
lrognis II 전자기학 제 장 : 전자파의전파 Prof. Young Cul L 초고주파시스템집적연구실 Advnd RF Ss Ingrion ARSI Lb p://s.u..kr/iuniv/usr/rfsil/ Advnd RF Ss Ingrion ARSI Lb. Young Cul L .4 편파 편파 전파방향에수직인평면의주어진점에서시간의함수로 벡터의모양과궤적을나타냄.
<4D F736F F D20BECBB1E220BDACBFEE20BAA4C5CD2C20C1C2C7A5B0E82C20C1C2C7A5BAAFC8AFC7E0B7C4>
 벡터, 좌표계, 좌표값, 그리고좌표변환행렬 이형근한국항공대학교항공전자및정보통신공학부 제어및로봇응용에서다양한좌표계와이를기반으로한벡터의좌표값이활용되고있다. 이는운동을수반하는대다수의지능시스템에있어서시스템의현재위치및자세정보가미래의동작을결정하고제어하는데필수불가결한정보로인식되기때문이다. 다양한응용분야에활용되는중요성에도불구하고, 필자의경험에의하면, 벡터및좌표계관련사항들은입문자가처음접하는단계에서큰부담을느끼는부분으로이해된다.
벡터, 좌표계, 좌표값, 그리고좌표변환행렬 이형근한국항공대학교항공전자및정보통신공학부 제어및로봇응용에서다양한좌표계와이를기반으로한벡터의좌표값이활용되고있다. 이는운동을수반하는대다수의지능시스템에있어서시스템의현재위치및자세정보가미래의동작을결정하고제어하는데필수불가결한정보로인식되기때문이다. 다양한응용분야에활용되는중요성에도불구하고, 필자의경험에의하면, 벡터및좌표계관련사항들은입문자가처음접하는단계에서큰부담을느끼는부분으로이해된다.
PowerPoint 프레젠테이션
 11 곡선과곡면 01 Spline 곡선 02 Spline 곡면 03 Subdivision 곡면 C n 연속성 C 0 연속성 C 1 연속성 2 C 2 연속성 01 Spline 곡선 1. Cardinal Spline Curve 2. Hermite Spline Curve 3. Bezier Spline Curve 4. Catmull-Rom Spline Curve 5.
11 곡선과곡면 01 Spline 곡선 02 Spline 곡면 03 Subdivision 곡면 C n 연속성 C 0 연속성 C 1 연속성 2 C 2 연속성 01 Spline 곡선 1. Cardinal Spline Curve 2. Hermite Spline Curve 3. Bezier Spline Curve 4. Catmull-Rom Spline Curve 5.
 연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형