디지털산업정보학회 논문지 제6권 제3호-2010년 9월 가상현실을 위한 몰입형 멀티채널 디스플레이 * 김 상 연 ** ㆍ임 성 민 *** ㆍ김 도 윤 **** ㆍ이 재 협 ***** Immersive Multichannel Display for Virtual Reality Kim, Sang YounㆍIm, Sung MinㆍKim, Do YoonㆍLee, Jae Hyub <Abstract> Virtual reality(vr) technology allows users to experience the same sensation as if they look and feel real objects, and furthermore it enables users to experience phenomena in virtual environment which are difficult to illustrate in real world. A multichannel display is one of the virtual reality systems for generating high-quality images and guaranteeing a wide view angle using multiple projectors. In this work, we present the multichannel display system whose resolution is 4096 x 1536. We implement an automatic calibration (geometric and color) method for compensating the distorted image and color. The results clearly show the proposed system provides continuous and smooth images. Key Words : CAVE, Immersive Sensation, Virtual Environment Ⅰ. 서론 1) 가상현실(VR)이란 특정한 세계의 환경/상황을 컴퓨터 를 이용하여 똑같이 모사(시뮬레이션)하여, 환경에 대한 정보를 인간에게 전달함으로써, 인간이 실제 세계의 환 경/상황을 똑같이 느끼는 것을 가능하게 하는 기술을 의 미한다. 이와 같은 가상현실 세계에서는 현실세계(실제 * 본 연구는 부분적으로 지식경제부 및 한국산업기술평가관리 원의 산업원천기술개발사업(정보통신)의 일환으로 수행하였 음. ( KI001824, Development of Digital Guardian technology for the disabled and the aged person). 또한 본 연구는 2010 년도 정보 (교육과학기술부)의 재원으로 한국연구재단의 지원 을 받아 수행된 기초연구사업임 (No. 2010-0012455) ** 한국기술교육대학교 조교수 *** 숙명여자대학교 강사 **** (주) 위드로봇 대표이사 ***** 한국기술교육대학교 정교수 세계)뿐만 아니라, 현실세계에서 불가능한 세계에 대한 시뮬레이션 체험이 가능하다[1-2]. 가상현실을 이용한 시 스템은 의료, 국방, 제품 설계 및 생산, 엔터테인먼트 등 다양한 분야의 어플리케이션에 핵심적인 엔진 역할을 하 고 있다. 이와 같은 가상현실 시스템은 독립적으로 운영 될 수도 있고 인터넷을 포함하는 컴퓨터 네트워크에 연 결되어 가상환경을 공유할 수도 있다. 가상현실 시스템 은 투영공간에서 3차원 물체의 정보를 갖게 하는 3차원 물체 모델링 기법, 가상환경에서 모양, 조명의 상태 등에 따라 물체를 실제처럼 보이게 하는 물체의 시각화 및 렌 더링, 인터랙션, 문제해결이 대상이 되는 시스템이 시간 에 따라서 어떻게 변화 하는지를 예측 또는 평가하는 시 뮬레이션 기술, 가상환경에서 발생하는 소리의 입체화 기술, 사용자에게 몰입감을 전달해 주는 가상환경 플랫 폼 기술 등 여러 기술들을 필요로 한다. 본 연구에서는 디지털산업정보학회 논문지 131
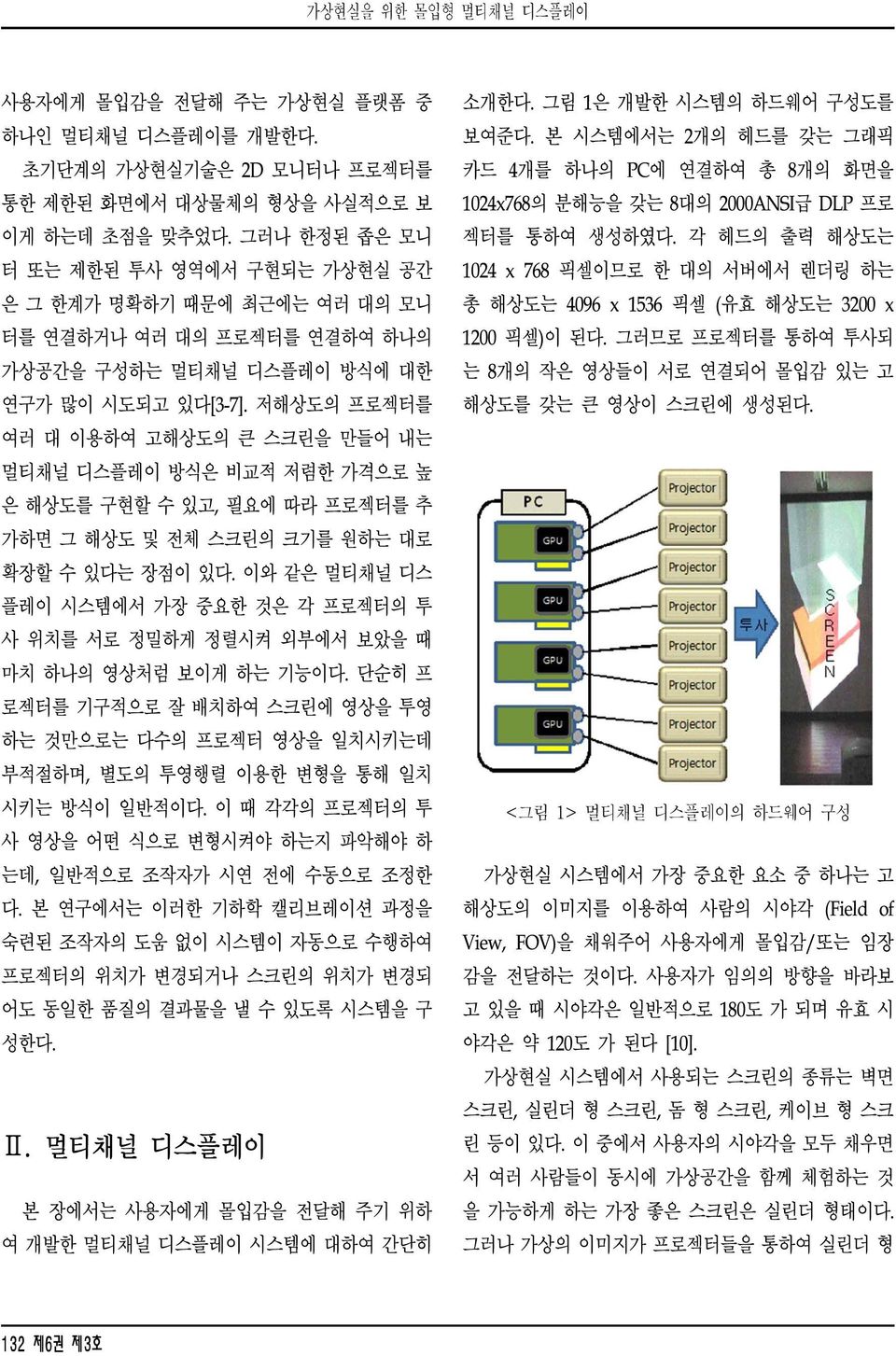
사용자에게 몰입감을 전달해 주는 가상현실 플랫폼 중 하나인 멀티채널 디스플레이를 개발한다. 초기단계의 가상현실기술은 2D 모니터나 프로젝터를 통한 제한된 화면에서 대상물체의 형상을 사실적으로 보 이게 하는데 초점을 맞추었다. 그러나 한정된 좁은 모니 터 또는 제한된 투사 영역에서 구현되는 가상현실 공간 은 그 한계가 명확하기 때문에 최근에는 여러 대의 모니 터를 연결하거나 여러 대의 프로젝터를 연결하여 하나의 가상공간을 구성하는 멀티채널 디스플레이 방식에 대한 연구가 많이 시도되고 있다[3-7]. 저해상도의 프로젝터를 여러 대 이용하여 고해상도의 큰 스크린을 만들어 내는 멀티채널 디스플레이 방식은 비교적 저렴한 가격으로 높 은 해상도를 구현할 수 있고, 필요에 따라 프로젝터를 추 가하면 그 해상도 및 전체 스크린의 크기를 원하는 대로 확장할 수 있다는 장점이 있다. 이와 같은 멀티채널 디스 플레이 시스템에서 가장 중요한 것은 각 프로젝터의 투 사 위치를 서로 정밀하게 정렬시켜 외부에서 보았을 때 마치 하나의 영상처럼 보이게 하는 기능이다. 단순히 프 로젝터를 기구적으로 잘 배치하여 스크린에 영상을 투영 하는 것만으로는 다수의 프로젝터 영상을 일치시키는데 부적절하며, 별도의 투영행렬 이용한 변형을 통해 일치 시키는 방식이 일반적이다. 이 때 각각의 프로젝터의 투 사 영상을 어떤 식으로 변형시켜야 하는지 파악해야 하 는데, 일반적으로 조작자가 시연 전에 수동으로 조정한 다. 본 연구에서는 이러한 기하학 캘리브레이션 과정을 숙련된 조작자의 도움 없이 시스템이 자동으로 수행하여 프로젝터의 위치가 변경되거나 스크린의 위치가 변경되 어도 동일한 품질의 결과물을 낼 수 있도록 시스템을 구 성한다. Ⅱ. 멀티채널 디스플레이 본 장에서는 사용자에게 몰입감을 전달해 주기 위하 여 개발한 멀티채널 디스플레이 시스템에 대하여 간단히 소개한다. 그림 1은 개발한 시스템의 하드웨어 구성도를 보여준다. 본 시스템에서는 2개의 헤드를 갖는 그래픽 카드 4개를 하나의 PC에 연결하여 총 8개의 화면을 1024x768의 분해능을 갖는 8대의 2000ANSI급 DLP 프로 젝터를 통하여 생성하였다. 각 헤드의 출력 해상도는 1024 x 768 픽셀이므로 한 대의 서버에서 렌더링 하는 총 해상도는 4096 x 1536 픽셀 (유효 해상도는 3200 x 1200 픽셀)이 된다. 그러므로 프로젝터를 통하여 투사되 는 8개의 작은 영상들이 서로 연결되어 몰입감 있는 고 해상도를 갖는 큰 영상이 스크린에 생성된다. <그림 1> 멀티채널 디스플레이의 하드웨어 구성 가상현실 시스템에서 가장 중요한 요소 중 하나는 고 해상도의 이미지를 이용하여 사람의 시야각 (Field of View, FOV)을 채워주어 사용자에게 몰입감/또는 임장 감을 전달하는 것이다. 사용자가 임의의 방향을 바라보 고 있을 때 시야각은 일반적으로 180도 가 되며 유효 시 야각은 약 120도 가 된다 [10]. 가상현실 시스템에서 사용되는 스크린의 종류는 벽면 스크린, 실린더 형 스크린, 돔 형 스크린, 케이브 형 스크 린 등이 있다. 이 중에서 사용자의 시야각을 모두 채우면 서 여러 사람들이 동시에 가상공간을 함께 체험하는 것 을 가능하게 하는 가장 좋은 스크린은 실린더 형태이다. 그러나 가상의 이미지가 프로젝터들을 통하여 실린더 형 132 제6권 제3호
스크린으로 투영되어 하나의 큰 이미지가 형성될 때 스 크린이 가지고 있는 특징으로 인하여 이미지가 왜곡될 가능성이 충분히 존재하므로 왜곡 없이 부드러운 이미지 를 구축하기 위한 복잡한 계산과정을 갖는 교정 방법 (calibration method)이 필요하다. 실린더 형 스크린의 또 다른 문제점은 가상환경내의 다루고자 하는 대상 물체가 움직이는 경우에 대상물체의 위치를 실린더형 스크린위 에서 계산하여 그 지점에 정확히 표현하는 것이 쉽지 않 다는 것이다. 그러므로 본 연구에서는 실린더 형 스크린 의 장점을 채용하면서 단점을 보완할 수 있는 꺾인 면 스크린(그림 2)을 채택하고 구축하였다. C++ 와 directx 를 이용하여 구축하여 CPU의 부담이 적 도록 구축되었다. 그러나 8개의 프로젝터를 통하여 생성 되는 영상을 정확히 8개의 스크린의 단면에 맞춰서 출력 할 때 영상의 접합부가 눈에 거슬리게 되며 또한 프로젝 터들이 외란 등 기타이유로 인해 조금이라도 움직이게 되면 영상은 왜곡 된다. 이러한 문제를 해결하기 위해 각 각의 영상을 서로 겹치게 하고 캘리브레이션 과정을 통 해 이 부분을 부드럽게 연결하였다. <그림 3> 실제 설치한 스크린 (a) 과 8개의 프로젝터들 (b) <그림 2> 제안한 꺾인 면 스크린 본 시스템은 그림 2와 같이 각 단면들 (1~8)이 평면으 로 구성되어 있는 꺾인면 스크린을 채택하였으므로 구축 및 유지/보수가 용이할 뿐 아니라 쉽게 캘리브레이션이 가능하다. 그리고 설치한 스크린은 가운데 면을 중심으 로 대칭이며 꺾여진 각도는 약 120도 이다. 사용자가 스 크린의 1m 앞부분에 서있다고 가정하면 160도의 시야각 을 채울 수 있다. 프로젝터들은 윗부분에 4개 그리고 아 랫부분에 4개를 설치하였고 윗부분의 4개의 프로젝터는 스크린의 위쪽 단면 4부분(1~4)에 영상을 투사하며 아랫 부분에 설치한 4개의 프로젝터는 스크린의 아래쪽 단면 4부분(5~8)에 영상을 투사한다. 그림 3은 실제 설치한 스 크린과 프로젝터들의 모습을 보여주고 있다. 본 연구에 서는 앞서 언급한 것과 같이 8개의 프로젝터들을 사용하 여 하나의 고해상도의 큰 이미지를 생성하였다. 영상의 출력속도는 약 40fps 이며 그래픽 시뮬레이션은 비주얼 Ⅲ. 대화성 및 자율성 기반의 멀티채널 디스플레이 VR 시스템에서는 몰입감과 임장감 뿐 아니라 대화성 및 자율성 역시 중요한 요소가 된다. 2장에서 설명한 시 스템은 몰입감 및 임장감을 전달해주는 데는 큰 무리가 없지만 자율성 및 대화성이 결여되어 있어 진정한 의미 에서의 가상현실 시스템이라고 판단하기에는 무리가 있 다. 그러므로 본 연구에서는 기하학 캘리브레이션 및 컬 러 캘리브레이션을 자동으로 수행하는 하드웨어를 개발 하여 자율성을 극대화 시키며 시연자의 의도를 자연스럽 게 반영할 수 있는 사용자 인터페이스 및 하드웨어를 개 발하였으며 모델을 기반으로 동작하는 렌더링 시스템을 구축하였다. 그림 4는 개발한 시스템의 블록도이다. 사용 자가 명령입력장치를 잡고 움직이면 사용자의 움직임을 감지하여 정해진 프로토콜에 따라 PC에 있는 명령해석 부로 무선통신을 통하여 전달한다. 그 후 명령해석부에 디지털산업정보학회 논문지 133
서는 사용자의 명령을 해석하여 그래픽 렌더링 및 캘리 브레이션 부로 전달하여 사실감 있는 영상을 그래픽 카 드와 프로젝터를 통해 스크린으로 출력한다. 그러므로 사용자는 가상의 물체를 실세계에서 존재하는 것처럼 느 끼게 된다. 이때 PC와 명령센싱 및 입력장치와의 무선통 신을 위해 115200 bps 의 속도를 가진 블루투스 모듈을 사용하였으며 사용자의 움직임을 감지하기 위해 적외선 센서를 사용하였다. 사용자 스크린 명령센싱및 입력장치 프로젝터 무선 통신 명령 해석부 그래픽 카드 <그림 4> 시스템 블록도 3.1 명령센싱 및 입력장치 그래픽 렌더링및 캘리브레이션 브레이션, 콘텐츠 제어 및 가상의 물체 조작을 위하여 제 어화면을 구성하였다. 그림 6의 1영역은 화면에 표시될 이미지의 크기를 결정하게 해 주며 2영역 및 3영역에 서는 각각 화면을 캘리브레이션 해 주며 스크린에 투사 될 이미지를 선택하여 보여줄 수 있게 해 준다. 화면에 투사할 내용들이 콘텐츠제어 부분에 등록이 되면 사용자 는 위에서 설명한 명령 센싱 및 입력 장치를 이용하여 투사한 영역을 손끝으로 선택할 수 있게 된다. 그리고 4 영역에서는 손끝의 움직임만으로 화면에 투사된 이미지 들을 회전, 확대/축소, 이동 할 수 있게 해 준다. 만일 사 용자가 명령입력 장치를 잡고 4영역의 첫 번째 슬라이 드 바의 위를 오른쪽으로 움직이면 가상의 물체는 x 방 향으로 회전한다. 그리고 두 번째 슬라이드 바는 이미지 를 z 방향으로 회전하도록 해 주며 세 번째 슬라이드 바 는 이미지의 확대/축소를 가능하게 해 준다. 본 연구에서는 사용자의 명령을 가상환경으로 전달하 기 위해 명령 센싱 및 입력 장치를 개발하였다. 본 장치 를 활용하면 마치 손끝에 마우스가 장착된 것처럼 단지 손끝을 움직임으로써 가상의 물체들을 자유롭게 돌려가 면서 확인할 수 있다. 개발한 장치는 그림 5와 같이 사용 자가 움직일 때마다 신호를 보내는 적외선 발광부와 움 직임을 감지하는 적외선 트래커, 그리고 사용자의 움직 임을 서버로 보내기 위한 무선 통신부로 구축하였다. 1 2 3 4 <그림 6> 가상물체 제어화면 <그림 5> 명령 센싱 및 입력 장치의 시스템 구성도 또한 본 연구에서는 그림 6과 같이 스크린 제어, 캘리 명령 입력 장치를 이용하여 마치 스크린이 터치필름 을 가지고 있는 것과 같이 화면을 터치 및 드래그 함으 로써 물체의 확대, 축소, 회전, 이동 등이 가능한지를 확 134 제6권 제3호
인하기 위하여 우선 멀티채널 디스플레이의 가장 오른쪽 화면에 제어 화면을 투사하고 물체와 인터랙션을 수행하 였다. 그림 7은 회전, 확대, 축소된 이미지들을 보여준다. 그림 7(a)와 7(b) 는 초기의 이미지와 x 축을 따라 회전된 후의 이미지를 보여주며 그림 7(c)와 7(d)는 축소된 이미 지와 확대된 이미지를 보여주고 있다. 그리고 그림 7(e) 와 7(f)는 z축을 따라 회전된 이미지를 보여주고 있다. 로 캘리브레이션 하였다. 왜곡되어 투사되고 있는 영역을 보정된 영역으로 투 사하기 위해 스크린에 포토디텍터가 내장된 장치를 부착 하고 영상의 밝기 값이 0(흑색) 과 1(백색)로 구성된 바이 너리 코드를 화면으로 투사하였다. x 축의 위치를 파악 하기 위하여 그림 8(a) 와 같이 흑색과 백색으로 구성된 세로 줄 무늬영상을 점차적으로 폭을 줄여가면서 투사하 고 y 축의 위치를 파악하기 위해 가로 줄무늬 영상을 투 사 하였다 (그림 8(b)). 이때 줄무늬 영상은 최소 1픽셀 폭을 가질 수 있으므로 바이너리 코드영상에 대한 밝기 값을 측정하면 상대적인 위치를 1픽셀 내로 파악할 수 있다. (a) (b) (c) (d) (a) (e) (f) <그림 7> 가상물체 제어 결과 3.2 기하학 캘리브레이션 및 실험 일반적으로 기하학 캘리브레이션 작업을 수행하기 위 해 투사영역과 조정될 영역을 삼각/사각 메쉬들로 나누 고 변환행렬(transformation matrix)을 계산한다. 캘리브 레이션 사용자들은 각 노드들을 수동으로 조절하고 육안 으로 확인해야 하기 때문에 쉽게 피로를 느끼게 되며 숙 련된 사람일 지라도 정밀하게 기하학 캘리브레이션을 수 행하는 것은 쉽지 않다. 그러므로 본 연구에서는 투사 이 미지를 검출하는 장치를 개발하고 이를 이용하여 자동으 (b) <그림 8> 바이너리코드를 이용한 자동 기하학 캘리브레이션 과정 바이너리 코드로 투사된 영상이미지를 감지하여 프로 젝터와 스크린 사이의 기하학적 관계를 파악하기 위하여 영상의 흑백을 구별하고 매 샘플링 시간마다 측정신호를 렌더링 서버에 무선으로 전달할 수 있는 통신 장치가 필 요하다. 본 연구에서는 포토디텍터와 마이크로프로세서 및 블루투스로 구성되는 장치를 개발하고 이를 이용하여 쉽게 기하학 캘리브레이션을 수행하였다. 일반적인 카메 라의 민감도는 인간의 눈과 다르기 때문에 사람의 눈에 다르게 보이는 두 개의 이미지가 일반 카메라로는 구분 하기 힘들 때가 존재한다. 그러므로 개발한 하드웨어는 컬러 캘리브레이션을 한꺼번에 수행할 수 있게 하기 위 하여 인간의 눈과 감도가 유사한 포토 디텍터(photo 디지털산업정보학회 논문지 135
(a) <그림 9> 캘리브레이션 장치 (a) : 개발한 캘리브레이션을 위한 하드웨어, (b) : LX1971의 특징 [11] (b) detector) 인 LX1971을 사용하였으며 사용의 편의를 위 해 무선으로 렌더링 서버와 연결하였다. 그림 9는 개발 한 하드웨어 시스템( WIGray라 명명)을 보여주고 있다. 개발한 하드웨어는 제어기로 M430F123 을 사용하였으며 서버에 검출된 신호를 보내기 위한 무선 통신 모듈로는 블루투스 (bluetooth)를 사용하였다. 그림 9(a) 의 빨간색 원 표시한 부분이 포토디텍터이며 그림 9(b) 는 사람의 눈과 사용한 포토디텍터의 파장에 따른 감도를 보여주고 있다. 기하학 캘리브레이션 결과를 확인하기 위해 프로젝터 에서 패턴을 그림 10과 같이 투사하고 캘리브레이션 장 치를 스크린에 부착하였다. 그리고 바이너리 코드를 투 사(그림 11)하여 프로젝터와 스크린 사이의 기하학적 배 치를 파악하고 파악한 배치를 Homogeneous 행렬형태로 구성한 후 투사한 이미지를 변형하여 캘리브레이션 전과 후의 이미지를 비교하였다. <그림 12> 기하학 캘리브레이션 수행 전 (왼쪽)과 수행후의 결과 (오른쪽) <그림 10> 캘리브레이션 장치 부착 모습 3.3 컬러 캘리브레이션 및 실험 <그림 11> 캘리브레이션 과정시 투사하는 바이너리 코드 일반적으로 프로젝터들은 같은 기종이라도 색상 차이 가 발생한다. 색상 오차가 발생하는 원인으로는 램프의 밝기 및 렌즈의 투과율이 서로 다르며 케이블 전송 시 아날로그 신호의 열화를 들 수 있다. 특히 프로젝터들은 오래 사용하면 사용할수록 램프의 밝기 값들이 점점 달 라지므로 색상차가 있는 각 프로젝터 화면을 최대한 동 136 제6권 제3호
일하게 만드는 컬러 캘리브레이션 과정이 꼭 필요하다. 기존의 시스템에서는 컬러 캘리브레이션을 육안으로 보 면서 직접 수동으로 조작함으로써 조작자의 피로도가 많 이 쌓이며 시간 역시 오래 걸리게 된다. 그러므로 프로젝 터의 각 중요색상을 투사하고 이의 밝기 값을 WIGray 를 이용하여 정량적으로 수치화 한 후 블랜딩 작업을 수 행하여 투사 이미지의 색상을 조정하였다. 컬러 캘리브 레이션의 결과를 확인하기 위해 다음과 같이 실험을 수 행하였다. 1) 캘리브레이션 장치를 프로젝터 투영면의 겹치는 부분에 배치. 2) PC 에 전달되는 밝기 값을 확인하면서 프로젝터의 디스플레이모드에서 지원하는 비디오 모드와 백색 강도, 감마곡선 등을 측정. 3) 밝기 값을 설정할 격자를 출력하며 각 격자의 밝 기 값을 조정함 4) 설정된 밝기 값은 각 노드사이의 밝기 값을 인터 폴레이션을 통해 산출하고 밝기 값 마스크를 이용 하여 edge 블렌딩을 수행하고 영상을 투사. (a) (b) <그림 13> 컬러 캘리브레이션 수행 전 (a)과 수행후의 결과 (b) 그림 13(a) 는 컬러 캘리브레이션을 수행하기 전의 이 미지이다. 2대의 프로젝터로 투영한 이미지들의 가운데 부분이 경계선으로 확연히 구분되며 두 이미지의 색상차 가 확연히 드러남을 알 수 있다. 그림 13(b)는 컬러 캘리 브레이션을 수행하고 난 후의 이미지이다. 그림 13(b)에 서 부터 접합면 및 두 개의 색상 차이가 보정된 부드러 운 이미지를 생성함을 알 수 있다. 3.4 결과 분석 <그림 14> 기하학 및 컬러 캘리브레이션 수행 후의 결과 그림 14는 모든 8채널의 기하학 캘리브레이션과 컬러 캘리브레이션을 수행하였을 때의 이미지이다. 각 스크린 의 경계 밝기 값 차이 5% 이내로 조정되었으며 각 캘리 브레이션을 수행하는데 소요시간은 채널당 약 30초 정도 로 측정되었다. 기존의 시스템들은[12-13] 주로 카메라를 사용하여 화 면을 조정하기 때문에 우선 화면을 캘리브레이션하기 전 에 먼저 카메라 자체를 캘리브레이션 해야 하는 번거로 움이 존재하며 또한 화면을 캘리브레이션 하기 위해 많 은 계산량이 필요하다. 일반적인 카메라는 렌즈, 조리개, 디지털산업정보학회 논문지 137
필름으로 구성이 되어있다. 제품으로 만들어져서 나오는 카메라는 같은 제조공정에서 만들어졌다 해도 렌즈의 크 기, 화면의 왜곡정도가 카메라마다 미세하게나마 차이가 생긴다. 따라서 카메라에 들어오는 영상을 제대로 구하 기 위해서는 카메라의 특성을 구하는 과정이 필요하다. 본 연구에서는 사람의 눈과 유사한 감도를 갖는 카메라 를 사용하였으므로 일반적인 카메라와 달리 영상에 왜곡 이 없고 correspondence문제가 없기 때문에 렌즈 왜곡 보정 및 교정이 필요 없으므로 카메라 자체를 캘리브레 이션하는 과정이 필요 없다. 또한 기하학 캘리브레이션 을 위해 바이너리코드를 사용하였고 컬러캘리브레이션 을 위해 비디오 모드와 백색강도, 감마곡선 등을 측정하 였으므로 복잡한 계산이 필요 없이 자동으로 캘리브레이 션 작업이 가능하다. Ⅳ. 결론 몰입형 가상현실 시스템을 구축하기 위한 가장 중요 한 요소 중 하나는 사람의 시야각을 모두 가상공간으로 채워 주는 것이다. 이러한 가상공간을 구축하기 위하여 본 연구에서는 여러 대의 프로젝터들을 사용하여 커다란 하나의 고 해상도의 이미지를 생성하는 멀티채널 디스플 레이 시스템을 구축하였다. 여러 대의 프로젝터를 이용 함으로 인해 경계선의 불일치 및 각 프로젝터들의 색상 이 일치하지 않게 되는 문제를 해결하기 위하여 자동으 로 경계선 및 색상을 일치시키는 장치와 기법을 개발하 였다. 또한 본 연구에서는 사용자가 마치 스크린에 터치 필름이 존재하는 것처럼 스크린을 조작함으로써 사용자 의 명령을 입력할 수 있는 장치 및 방법도 개발하였다. 이와 같은 시스템을 평가하기 위해 실험을 수행하였으며 실험 결과 제안한 시스템은 실시간으로 사용자의 명령을 서버로 전달하여 가상의 물체를 조작할 수 있음을 증명 하였다. 참고문헌 [1] 김문석, 국내문화유적의 디지털콘텐츠 개발에 관 한연구, 디지털산업정보학회 논문지, 제 5권, 제 3 호, 2009, pp. 147-154. [2] 이현구, 김동규, HCI를 위한 오감정보처리에 관한 연구, 디지털산업정보학회 논문지, 제 5권, 제 2호, 2009, pp. 77-85. [3] C. Cruz-Neira, D. Sandin and T. DeFanti, Surround-screen Projection-based Virtual Reality: The Design and Implementation of the CAVE, SIGGRAPH 1993 Annual Conference Series, Vol. 27, Anaheim, CA, Aug. 1993, pp. 135-142. [4] M. Hereld, I. R. Judson and R. L. Stevens, Introduction to Building Projection-based Tiled Displays, IEEE Visualization 1999, San Francisco, CA, Oct, 1999, pp. 215-224. [5] R. Yang, D. Gotz, J. Hensley, H. Towles, and M. Brown, PixelFlex: A Reconfigurable Multi-Projector Display System, IEEE Visualization, San Diago California, Oct. 2001. [6] Y. Chen, H. Chen, D. Clark, Z. Liu, G. Wallace, and K. Li, Software Environments for Clusterbased Display Systems, IEEE International Symposium on Cluster Computing and the Grid, Brisbane, Australia, 2001, pp. 202-210. [7] G. Humphreys, P. Hanrahan, A Distributed Graphics System for large Tiled Displays, IEEE Visualization, San Francisco, Oct. 1999, pp. 215-224. [8] Johnny C. Lee, Paul H. Dietz, D. Maynes-Aminzade, R. Raskar, S. E. Hudson, Automatic Projector Calibration with Embedded Light Sensors, Symposium on User Interface Software and Technology Proceedings of the 17th 138 제6권 제3호
annual ACM symposium on User interface software and technology. [9] Raskar, R., Beardsley, P. A., A Self-Correcting Projector, IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), December 2001. [10] K. W. Arthur, Effects of Field of View on Performance with Head-Mounted Displays, Master Thesis, Univ. of North Carolina, 2000 [11] LX1971 datasheet, http://www.microsemi.com/ datasheets/lx1971.pdf [12] T. Johnson and H. Fuchs. Real-time projector tracking on complex geometry using ordinary imagery. IEEE CVPRWorkshop on Projector Camera Systems (PROCAMS), 2007. [13] T. Johnson, G. Welch, H. Fuchs, E. L. Force, and H. Towles. A distributed cooperative framework for continuous multi-projector pose estimation. IEEE Virtual Reality Conference, pages 35 42, 2009. 저자소개 임 성 민 Im, Sung Min 김 도 윤 Kim, Do Yoon 이 재 협 Lee, Jae Hyub 1999년 2월~현재 숙명여자대학교 강사 관심분야 : 가상교육, 원격교육 E-mail : imsm1@freechal.com 2005년 3월~현재 (주) 위드로봇 대표이사 관심분야 : Computer Vision, 가상현실, 증강현실, 임베디드시스템 E-mail : getcome@gmail.com 1993년 3월~현재 한국기술교육대학교 정교수 관심분야 : 컴퓨터그래픽스, 가상현실, 인터랙션 E-mail : jae@kut.ac.kr 2006년 3월~현재 한국기술교육대학교 조교수 2004년 2월 KAIST (공학박사) 1997년 2월 KAIST (공학석사) 1995년 2월 고려대학교(공학사) 논문접수일 : 2010년 5월 13일 수 정 일 : 2010년 6월 15일 게재확정일 : 2010년 7월 6일 김 상 연 Kim, Sang Youn 관심분야 : 햅틱스, 가상현실, 로보틱스 E-mail : sykim@kut.ac.kr 디지털산업정보학회 논문지 139