<31302E20BFACB1B8BDC7BCD2B0B35FC7D1BEE7B4EB5B4B524F535D2E687770>
|
|
|
- 길강 창
- 6 years ago
- Views:
Transcription

 센서모듈을개발하고, 획득된신호를이용하여관절의운동및인간의관절구동의지를파악하기위한생체신호처리알고리즘을개발하여실험을진행하고있다.")

![생체신호처리알고리즘의연구에의해 [ 그림 2] 와같이 EMG 센서를통해인간의관절구동 ( 운동 ) 의지 를예측할수있는알고리즘에관한연구를진행하여소기의성과를보이고있다.](/docs-images/91/105046292/images/1-3.jpg "이러한센서개발에의한신호획득및신호처리알고리즘을기반으로하여관절구동의지를예측하여재활로봇에적용하고자하는연구를진행중이다.")
1 칼럼 한양대학교 BioRobotics Lab 소개 한양대학교 BioRobotics Lab 이철우, 이호열, 최영진 1. 서론인간을포함한생물을분석하거나모방하여로봇공학에적용하려는연구가많이진행되고있다. 특히재활훈련및재활보조를위한로봇개발을위한연구는대상이사람인만큼사람의특성을분석하거나모방할필요성이있다. 이러한목표를가지고한양대학교바이오로봇연구실에서는생체신호를획득하는센서시스템의개발및생체신호를이용하여로봇공학에적용하려는연구를활발히진행하고있다. 대표적인연구로는생체신호중인간의근육중관절의구동과직접적으로관련있는근육의근전도 (EMG) 센서모듈을개발하고, 획득된신호를이용하여관절의운동및인간의관절구동의지를파악하기위한생체신호처리알고리즘을개발하여실험을진행하고있다. 또한선천적, 후천적인요인에의해보행신경이손상된환자또는근력이부족한환자를대상으로하는재활로봇시스템의개발에관한연구를진행중이다. 2. 생체신호처리다양한생체신호중근전도 (EMG) 신호는인간의운동에직접적으로관련있는신호이다. 이러한 EMG 신호를측정하여재활로봇을구동을하기위한연구를진행하고있다. [ 그림 1] 과같이인간의근육으로부터 EMG신호를획득하고근육의움직임에대한정보를추출하기위한센서모듈을개발하였다. 생체신호처리알고리즘의연구에의해 [ 그림 2] 와같이 EMG 센서를통해인간의관절구동 ( 운동 ) 의지 를예측할수있는알고리즘에관한연구를진행하여소기의성과를보이고있다. 이러한센서개발에의한신호획득및신호처리알고리즘을기반으로하여관절구동의지를예측하여재활로봇에적용하고자하는연구를진행중이다. 또한 [ 그림 3] 과같이사람얼굴의안구근육신호 (EOG) 를이용하여제어할수있는휠체어에관한연구를진행하고있다. 이와같이다양한생체신호를측정및신호처리알고리즘에관한연구를통해재활로봇시스템에다양하게사용할수있는연구를진행 [ 그림 1] EMG 를이용하여해당관절각추출을위한신호처리알고리즘 [1] [ 그림 2] EMG 신호를이용한관절각추출실험 [1] 82 로봇학회지제 6 권제 4 호
![[ 그림 3] EOG 신호처리를이용한안구움직임기반휠체어제어연구 하고있다. 3. 보행훈련로봇 사람에게있어서보행능력은인간의존엄성을지키기위한중요한요소중의하나이다. 보행능력을상실하게하는원인으로는여러가지가있다. 신경학적인원인에의해보행능력이상실된경우재활훈련을통해회복할가능성이존재한다.](/docs-images/91/105046292/images/2-0.jpg "척수외상, 뇌졸중, 외상성뇌손상, 다발성경화증, 뇌성마비등은대표적으로편측마비를일으킬수있는신경학적손상의예이다. 이러한손상의경우신경촉진치료기법으로재활훈련을하고있다. 기존의훈련방식은트래드밀위의환자를두명의물리치료사의힘에의해반복적인보행을하도록하는방식이었다. 이방식은의사가환자를걷게하는데집중하기때문에치료과정중환자의상태나반응을관찰하기힘들다.")

2 [ 그림 3] EOG 신호처리를이용한안구움직임기반휠체어제어연구 하고있다. 3. 보행훈련로봇 사람에게있어서보행능력은인간의존엄성을지키기위한중요한요소중의하나이다. 보행능력을상실하게하는원인으로는여러가지가있다. 신경학적인원인에의해보행능력이상실된경우재활훈련을통해회복할가능성이존재한다. 척수외상, 뇌졸중, 외상성뇌손상, 다발성경화증, 뇌성마비등은대표적으로편측마비를일으킬수있는신경학적손상의예이다. 이러한손상의경우신경촉진치료기법으로재활훈련을하고있다. 기존의훈련방식은트래드밀위의환자를두명의물리치료사의힘에의해반복적인보행을하도록하는방식이었다. 이방식은의사가환자를걷게하는데집중하기때문에치료과정중환자의상태나반응을관찰하기힘들다. 이에대한대안으로스위스호코마 ( 사 ) 는 Lokomat이라는재활보조장비를개발해세계에널리보급하고있다. Lokomat과같은보행훈련장치는물리치료사들을환자의훈련에서해방시켜환자에게좀더나은치료를할수있게만들어주고있다. 더욱이신경촉진치료기법을이용한재활치료시로봇을이용함으로써환자가안전한보행패턴으로지속적인반복훈련을할수있게되었는데, 이의관한기초자료조사를하면다음과같다, [ 그림 4] Lokomat[2] 직이는 2자유도의메커니즘구조로표준화된보행궤적을따라동일한운동을반복해서손상된신경을활성화시키는목적으로개발되었다 [3]. 또한 [ 그림 5] 에서제시된 Gravity-Balancing Orthosis( 이하 GBO) 는수동식스프링을이용한중력보상메커니즘을기초로제작되었다. [ 그림 6] 의 IEMG 측정결과와같이액추에이터를사용하지않고수동식스프링만을사용한메커니즘만으로도보생시중력을보상하여기구의착용자가사용해야하는힘은크게줄어듬을보여주고있다. 수동형보행훈련장치인 GBO 이후에 Sunil K. Agrawal 교수가선보인 Active Leg Exoskeleton( 이하 ALEX) 는트래드밀보행훈련장비로Lokomat과비교하여관절마다자유도를높여착용자가실제걸을때와유사하게움직일수있도록 [ 그림 7] 과같이개발되었다. 표1 에서는 ALEX 를착용하고훈련한두피실험자의정보를보여주고있다. 두사람모두훈련을시작하기전보다트래드밀에서더잘걸을수있게된것을알수있다. 위에서제시된연구사례와같이신경촉진기법을활용한보행재 3.1 기존보행재활훈련 Lokomat은 2001년호코마 ( 사 ) 에서완성한최초의상용화된보행훈련로봇이다. 고관절과슬관절을움 [ 그림 5] Gravity-Balancing Orthosis 의구조 [4] 한양대학교 BioRobotics Lab 소개 83

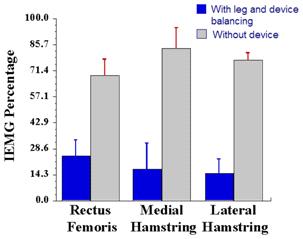
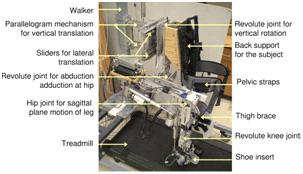
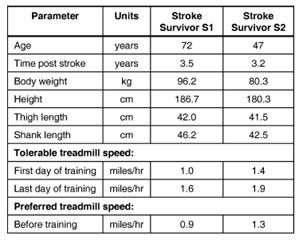
3 활훈련로봇은그효율성을보여주고있다. [ 그림 6] GBO 의착용유무에따른실험대상자 5 명의평균 IEMG 비율비교 [4] [ 그림 7] ALEX 의세부구조 [5] 3.2 보행재활로봇연구방향선천적또는사고로인한신경손상으로보행이불가능한사람들을재활시킬수있는로봇시스템의개발은임상의단계를넘어이제는실제재활훈련에많이사용되고있으며그효과및효율성은많은연구및임상사례에서보여지고있다. 그러나현재까지의연구는신경촉진기법을이용한재활훈련에만초점을두고있다. 사실장시간동안보행을하지못했던환자는신경촉진치료이후에심리적인요인, 근력부족, 적응부족으로인해실생활에적응하기까지는아직도많은시간과타인의도움을필요로하는실정이다. [ 그림 8] 은 Lokomat를이용한신경촉진훈련이후실생활에적응을위한훈련과정을보여주고있다. 이와같이로봇시스템을이용하여신경촉진치료를하고자하는목적으로써현재까지의연구결과는어느정도그효율성및성과들을보여주고있지만신경치료후실생활적응에까지도움을줄수있는로봇시스템의개발및연구는아직미미하다. 특히기존연구들은미리정해진보행패턴에의한치료를목표로하기때문에재활을목적으로하는환자는수동적으로훈련에참여하게된다. 수동적인재활훈련에서의보행과본인의의지에의한보행이필요한실생활의적응은그차이가크다. 이러한요소를해소또는감소할수있는재활훈련로봇시스템의개발이점차진행되고있으며, 앞으로도지속 < 표 1> 보행훈련정보 [5] [ 그림 8] 실제보행적응훈련 [6] 84 로봇학회지제 6 권제 4 호

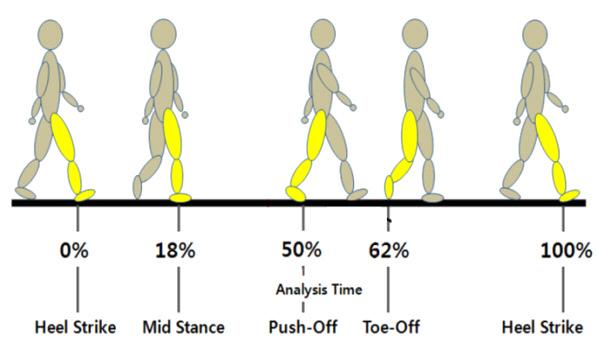
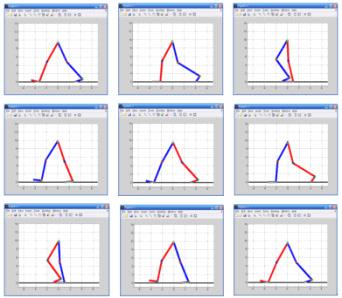
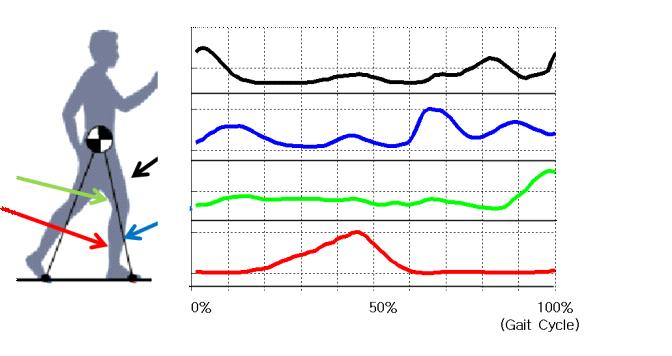
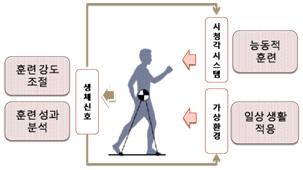
4 적으로연구해야할방향이다. [ 그림 9] 는환자가직접훈련의결과를모니터링하거나시각장치에의한간단한게임을하며재활훈련을수행할수있도록하는시스템이다. 이러한연구는환자가훈련에보다능동적으로참여할수있도록유도함으로써그효과를높일뿐아니라실생활에적응하는데많은도움을줄수있도록목표로하고진행되고있는연구이다. 신경촉진치료를위한재활분야를넘어다양한분야에서재활훈련을위한로봇시스템이개발되고있다. 이러한시스템은훈련뿐만아니라훈련후시스템없이일상생활을통해스스로지속적인훈련을할수있도록개발되어야한다. [ 그림 10], [ 그림 11], [ 그림 12] 는정상인의보행주기, 보행데이터를이용한시뮬레이션결과와보행주기시측정한근전도 (EMG) 신호를저대역통과필터 (LPF) 와제곱평균 (RMS) 한것이다. 신경손상에의해보행에장애가있는환자들은 EMG신호가미약하거나불규칙한형태로생성되어정상보행을하지못하는경우가많다. 재활훈련시생체신호 (EMG) 를정상적인보행시의 신호와비교분석함으로써재활훈련성과및적응도를평가또는유추할수있다. 이러한방법들을사용하여훈련성과및적응에따라훈련의강도및훈련방법을환자에맞도록조절함으로써보다효율적으로 [ 그림 11] 보행시뮬레이션 [ 그림 9] 시각장치를이용한훈련 [2] [ 그림 12] 근전도신호 ( 정상보행 ) [ 그림 10] 보행주기 (Gait Cycle)[7] [ 그림 13] 생체정보활용재활훈련개념도 한양대학교 BioRobotics Lab 소개 85
![재활훈련을진행할수있다. 이와같은연구를통해 [ 그림 13] 과같이재활대상자가훈련에능동적으로참여하도록유도하고, 훈련강도조절, 가상환경에서의훈련등을통하여재활훈련의효과를높일뿐아니라훈련후일상생활에보다쉽게적응할수있는로봇시스템을개발한다면더욱효과적인재활훈련이이루어질것으로보여진다. 4.](/docs-images/91/105046292/images/5-0.jpg "결론현재한양대바이오로봇연구실에서는생체신호획득을위한센서의개발과재활로봇연구를많이진행하고있다. 특히생체신호의획득및신호처리를통해인간의관절및다양한신체부위의활동및활동의지를예측함으로써보다효율적인재활로봇의개발이가능함을알수있다. 신경촉진치료기법을위한재활로봇이개발되고있으며상용화되어실제재활훈련에사용되고있다. 이러한많은연구에도불구하고보다효율적인재활훈련을위해많은연구가필요하다.")
5 재활훈련을진행할수있다. 이와같은연구를통해 [ 그림 13] 과같이재활대상자가훈련에능동적으로참여하도록유도하고, 훈련강도조절, 가상환경에서의훈련등을통하여재활훈련의효과를높일뿐아니라훈련후일상생활에보다쉽게적응할수있는로봇시스템을개발한다면더욱효과적인재활훈련이이루어질것으로보여진다. 4. 결론현재한양대바이오로봇연구실에서는생체신호획득을위한센서의개발과재활로봇연구를많이진행하고있다. 특히생체신호의획득및신호처리를통해인간의관절및다양한신체부위의활동및활동의지를예측함으로써보다효율적인재활로봇의개발이가능함을알수있다. 신경촉진치료기법을위한재활로봇이개발되고있으며상용화되어실제재활훈련에사용되고있다. 이러한많은연구에도불구하고보다효율적인재활훈련을위해많은연구가필요하다. 로봇시스템을통해서훈련효과를더욱높이는연구도필요하며이와더불어시스템을사용한훈련이후지속적으로일상생활을통해훈련할수있도록일상생활에빨리적응할수있는재활훈련장치의연구가요구된다. 이와같이본연구실에서는재활의대상인인간을이해하고분석하기위해다양한생체신호를처리하는알고리즘에관한연구를진행하고있다. 또한이를로봇공학기술에적용하여효율적, 실용적인재활로봇시스템을개발하는연구를활발히진행하고있다. 참고문헌 gait training robot Lokomat, Proc. of IEEE Int. Conf. on Rehabilitation Robotics, pp , [4] Sai K. Banala, Sunil K. Agrawal, Abbas Fattah, Vijaya Krishnamoorthy, Wei-Li Hsu, John Scholz, and Katherine Rudolph, Gravity- Balancing Leg Orthosis and Its Performance Evaluation, IEEE Transactions on Robotics, pp , [5] Sai K. Banala, Seok Hun Kim, Sunil K. Agrawal, and John P. Scholz, Robot Assisted Gait Training With Active Leg Exoskeleton (ALEX), IEEE Transactions on Neural Systems and Rehabilitation Engineering, pp. 2 8, [6] [7] Kevin W. Hollander and Thomas G. Sugar, Rehabilitation Robotics, Itech Education and Publishing, pp , 이철우 2009년한양대전자정보시스템공학 ( 학사 ) 현재한양대학교전자전기제어계측공학석사과정관심분야 : Bio-Robotics, Kinematics, 선형 / 비선형강인제어 [1] 유현재, 이현철, 최영진, 생체 EMG 센서개발및응용, 제2회한국지능로봇하계종합학술대회, pp , [2] [3] Lars Lünenburger, Gery Colombo, Robert Riener, and Volker Dietz, Clinical assessments performed during robotic rehabilitation by the 86 로봇학회지제 6 권제 4 호

 지능로봇연구센터선임연구원현재한양대학교공학대학전자시스템공학과조교수관심분야 : Bio-Robotics,")
6 이호열 1978년 9월 4일생 2004년부경대학교제어계측공학 ( 학사 ) 2008년한양대학교메카트로닉스공학 ( 석사 ) 현재한양대학교전기전자제어계측공학과박사과정관심분야 : Bio-Robotics, Robotics, Mechanism. 최영진 1970년 5월 15일생 1994년한양대정밀기계공학 ( 학사 ) 1996년포항공대기계공학 ( 석사 ) 2002년포항공대기계공학 ( 박사 ) 2002~2005년한국과학기술연구원 (KIST) 지능로봇연구센터선임연구원현재한양대학교공학대학전자시스템공학과조교수관심분야 : Bio-Robotics, 생체신호처리, 휴머노이드로봇, 선형 / 비선형강인 / 최적제어, 한양대학교 BioRobotics Lab 소개 87
<C0CCBCF8BFE42DB1B3C1A4BFCFB7E12DB1E8B9CCBCB12DC0DBBCBAC0DAB0CBC1F5BFCFB7E12DB8D3B8AEB8BBB3BBBACEC0DAB0CBC1F52E687770>
 사회복지용 지능로봇 기술동향 머 리 말 목 차 제1장 서 론 1 제2장 기술의 특징 3 제3장 사회복지용 지능 로봇산업의 기술 수요 전망 11 제4장 사회복지용 지능 로봇의 기술 동향 32 제5장 결론 및 정책 제언 103 참고문헌 109 표 목차 그림 목차 제1장 서 론 1. 목적 및 필요성 2. 분석내용 및 범위 제2장 기술의 특징 1. 지능형 로봇기술의
사회복지용 지능로봇 기술동향 머 리 말 목 차 제1장 서 론 1 제2장 기술의 특징 3 제3장 사회복지용 지능 로봇산업의 기술 수요 전망 11 제4장 사회복지용 지능 로봇의 기술 동향 32 제5장 결론 및 정책 제언 103 참고문헌 109 표 목차 그림 목차 제1장 서 론 1. 목적 및 필요성 2. 분석내용 및 범위 제2장 기술의 특징 1. 지능형 로봇기술의
슬라이드 1
 공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
<B8B6B1D4C7CF2DBAD0BEDFB0CBC5E4BFCF2DB1B3C1A4BFCFB7E128C0CCC8ADBFB5292DC0DBBCBAC0DAB0CBC1F5BFCF2DB8D3B8AEB8BB2DB3BBBACEB0CBC1F52E687770>
 가정용 지능로봇의 기술동향 머리말 목 차 제1장 서 론 1 제2장 기술의 특징 4 제3장 가정용 로봇 산업 및 기술수요 전망 14 4장 가정용 로봇의 기술동향 27 5장 주요국의 가정용 로봇의 기술정책 분석 61 6장 국제표준화와 특허출원 동향 80 7장 결론 및 정책 제언 86 참고문헌 92 표 목차 그림 목차 제1장 서 론 1. 기술동향분석의 목적 및
가정용 지능로봇의 기술동향 머리말 목 차 제1장 서 론 1 제2장 기술의 특징 4 제3장 가정용 로봇 산업 및 기술수요 전망 14 4장 가정용 로봇의 기술동향 27 5장 주요국의 가정용 로봇의 기술정책 분석 61 6장 국제표준화와 특허출원 동향 80 7장 결론 및 정책 제언 86 참고문헌 92 표 목차 그림 목차 제1장 서 론 1. 기술동향분석의 목적 및
1 9 2 0 3 1 1912 1923 1922 1913 1913 192 4 0 00 40 0 00 300 3 0 00 191 20 58 1920 1922 29 1923 222 2 2 68 6 9
 (1920~1945 ) 1 9 2 0 3 1 1912 1923 1922 1913 1913 192 4 0 00 40 0 00 300 3 0 00 191 20 58 1920 1922 29 1923 222 2 2 68 6 9 1918 4 1930 1933 1 932 70 8 0 1938 1923 3 1 3 1 1923 3 1920 1926 1930 3 70 71
(1920~1945 ) 1 9 2 0 3 1 1912 1923 1922 1913 1913 192 4 0 00 40 0 00 300 3 0 00 191 20 58 1920 1922 29 1923 222 2 2 68 6 9 1918 4 1930 1933 1 932 70 8 0 1938 1923 3 1 3 1 1923 3 1920 1926 1930 3 70 71
<BACFC7D1B3F3BEF7B5BFC7E22D3133B1C733C8A3504446BFEB2E687770>
 북한의 주요 농업 관련 법령 해설 1) 이번 호와 다음 호에서는 북한의 주요 농업 관련 법령을 소개하려 한다. 북한의 협동농장은 농업협동조합기준규약초안 과 농장법 에 잘 규정되어 있다. 북한 사회주의 농업정책은 사회 주의농촌문제 테제 2), 농업법, 산림법 등을 통해 엿볼 수 있다. 국가계획과 농업부문의 관 계, 농산물의 공급에 관해서는 인민경제계획법, 사회주의상업법,
북한의 주요 농업 관련 법령 해설 1) 이번 호와 다음 호에서는 북한의 주요 농업 관련 법령을 소개하려 한다. 북한의 협동농장은 농업협동조합기준규약초안 과 농장법 에 잘 규정되어 있다. 북한 사회주의 농업정책은 사회 주의농촌문제 테제 2), 농업법, 산림법 등을 통해 엿볼 수 있다. 국가계획과 농업부문의 관 계, 농산물의 공급에 관해서는 인민경제계획법, 사회주의상업법,
 NCS 기반일학습병행대학표준모델개발 책을펴내며 목차 표목차 그림목차 요약 i ii NCS 기반일학습병행대학표준모델개발 요약 iii iv NCS 기반일학습병행대학표준모델개발 요약 v vi NCS 기반일학습병행대학표준모델개발 요약 vii viii NCS 기반일학습병행대학표준모델개발 요약 ix x NCS 기반일학습병행대학표준모델개발 제 1 장서론
NCS 기반일학습병행대학표준모델개발 책을펴내며 목차 표목차 그림목차 요약 i ii NCS 기반일학습병행대학표준모델개발 요약 iii iv NCS 기반일학습병행대학표준모델개발 요약 v vi NCS 기반일학습병행대학표준모델개발 요약 vii viii NCS 기반일학습병행대학표준모델개발 요약 ix x NCS 기반일학습병행대학표준모델개발 제 1 장서론
편집-krs_07_0033.hwp
 242 로봇공학회논문지제 2 권제 3 호 (2007.9) MSRS 시뮬레이션환경에서가상로봇의네트웍제어 Network Control for Virtual Robot in MSRS Simulation Environment 신동관 1 이성훈 2 이수영 3 최병욱 Dong-Gwan Shin 1 Sung-Hun Lee 2 Soo-Yeong Yi 3 Byoung-Wook
242 로봇공학회논문지제 2 권제 3 호 (2007.9) MSRS 시뮬레이션환경에서가상로봇의네트웍제어 Network Control for Virtual Robot in MSRS Simulation Environment 신동관 1 이성훈 2 이수영 3 최병욱 Dong-Gwan Shin 1 Sung-Hun Lee 2 Soo-Yeong Yi 3 Byoung-Wook
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE Jun.; 27(6),
,") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2016 Jun.; 276), 504511. http://dx.doi.org/10.5515/kjkiees.2016.27.6.504 ISSN 1226-3133 Print)ISSN 2288-226X Online) Near-Field
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2016 Jun.; 276), 504511. http://dx.doi.org/10.5515/kjkiees.2016.27.6.504 ISSN 1226-3133 Print)ISSN 2288-226X Online) Near-Field
Sequences with Low Correlation
 레일리페이딩채널에서의 DPC 부호의성능분석 * 김준성, * 신민호, * 송홍엽 00 년 7 월 1 일 * 연세대학교전기전자공학과부호및정보이론연구실 발표순서 서론 복호화방법 R-BP 알고리즘 UMP-BP 알고리즘 Normalied-BP 알고리즘 무상관레일리페이딩채널에서의표준화인수 모의실험결과및고찰 결론 Codig ad Iformatio Theory ab /15
레일리페이딩채널에서의 DPC 부호의성능분석 * 김준성, * 신민호, * 송홍엽 00 년 7 월 1 일 * 연세대학교전기전자공학과부호및정보이론연구실 발표순서 서론 복호화방법 R-BP 알고리즘 UMP-BP 알고리즘 Normalied-BP 알고리즘 무상관레일리페이딩채널에서의표준화인수 모의실험결과및고찰 결론 Codig ad Iformatio Theory ab /15
1
 - MEDIC (MEDical Intelligent wheelchair ) MedicalIntelligent, Wheelchair MEDIC. MEDIC LG Global Challenger 2003 - 1. 3 2. 4 2.1 4 (1) 4 (2) 5 2.2 6 (1) 6 (2) 6 (3) 7 3. 8 3.1 8 3.2 10 3.3 11 4. 12 4.1
- MEDIC (MEDical Intelligent wheelchair ) MedicalIntelligent, Wheelchair MEDIC. MEDIC LG Global Challenger 2003 - 1. 3 2. 4 2.1 4 (1) 4 (2) 5 2.2 6 (1) 6 (2) 6 (3) 7 3. 8 3.1 8 3.2 10 3.3 11 4. 12 4.1
 이수구분 교과목명 학점 시간 선수 사회체육학개론 3 3 선수 트레이닝방법론 3 3 3 3 0 3 3 0 3 3 0 석사 3 3 0 교과목학점강의실습수강대상 스포츠경영학 Sport management 3 3 0 해양스포츠론 Marine Sport 3 3 0 석사 해양스포츠소비자행동론 Marine Sport Consumer Behavior 3 3 0 교과목학점강의실습수강대상
이수구분 교과목명 학점 시간 선수 사회체육학개론 3 3 선수 트레이닝방법론 3 3 3 3 0 3 3 0 3 3 0 석사 3 3 0 교과목학점강의실습수강대상 스포츠경영학 Sport management 3 3 0 해양스포츠론 Marine Sport 3 3 0 석사 해양스포츠소비자행동론 Marine Sport Consumer Behavior 3 3 0 교과목학점강의실습수강대상
ÇÁ·Î±×·¥Áý
 http://www.kimst.or.kr 2013 2013. 7. 4 5 2013 Contents 01 02 03 04 05 07 10 16 17 18 19 20 21 93 95 96 KIMST 13:0013:20 13:2014:00 14:0018:00 18:0018:30 18:3020:00 09:0011:50 11:5012:50 12:5016:00 02 http://www.kimst.or.kr
http://www.kimst.or.kr 2013 2013. 7. 4 5 2013 Contents 01 02 03 04 05 07 10 16 17 18 19 20 21 93 95 96 KIMST 13:0013:20 13:2014:00 14:0018:00 18:0018:30 18:3020:00 09:0011:50 11:5012:50 12:5016:00 02 http://www.kimst.or.kr
£01¤Áø¼®
 1904 7 17 Ernest Thomas Bethell) 1910 8 30 1945 11 10 1929 1938 4 45 2003 119 1941 30 1942 10 368 433 90 130 1938 27 1942 40 1939 1940 8 120 1938 3 10 1 3 60 100 4 1 25 100 4 29 31 6 30 121 3 11 10 46
1904 7 17 Ernest Thomas Bethell) 1910 8 30 1945 11 10 1929 1938 4 45 2003 119 1941 30 1942 10 368 433 90 130 1938 27 1942 40 1939 1940 8 120 1938 3 10 1 3 60 100 4 1 25 100 4 29 31 6 30 121 3 11 10 46
2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관
 2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관 2015 개정교육과정에따른정보과평가기준개발연구 연구협력진 머리말 연구요약 차례 Ⅰ 서론 1 Ⅱ 평가준거성취기준, 평가기준, 성취수준, 예시평가도구개발방향 7 Ⅲ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의개발 25 Ⅳ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의활용방안
2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관 2015 개정교육과정에따른정보과평가기준개발연구 연구협력진 머리말 연구요약 차례 Ⅰ 서론 1 Ⅱ 평가준거성취기준, 평가기준, 성취수준, 예시평가도구개발방향 7 Ⅲ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의개발 25 Ⅳ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의활용방안
KEIT PD Issue Report PD ISSUE REPORT JULY 2016 VOL 개요 배경 현재세계각국은개별기술의발전의한계를느끼고여러분야의기술을융복합하여새로운시장의시너지를창출하고자 한다. 재활의료분야도기존의기계, 전자, 소재와같은전통기술에서벗
 재활의료기기기술동향및전망 l저자l 허영 PD / 메디칼디바이스정해근책임 / 전자전기평가팀류제청박사 / 재활공학연구소 SUMMARY 목적 재활의료기기는고령자및장애인의의료재활과원활한사회복귀를위해손실된근골격계의기능을정상으로회복시키기위한연구임. 재활로봇은노약자, 장애인, ( 재활 ) 치료를요하는환자등건강한사람들에비해추가적인서비스가제공되어야하는사람들을대상으로하는재활복지로봇으로규정
재활의료기기기술동향및전망 l저자l 허영 PD / 메디칼디바이스정해근책임 / 전자전기평가팀류제청박사 / 재활공학연구소 SUMMARY 목적 재활의료기기는고령자및장애인의의료재활과원활한사회복귀를위해손실된근골격계의기능을정상으로회복시키기위한연구임. 재활로봇은노약자, 장애인, ( 재활 ) 치료를요하는환자등건강한사람들에비해추가적인서비스가제공되어야하는사람들을대상으로하는재활복지로봇으로규정
Microsoft PowerPoint - 30.ppt [호환 모드]
![Microsoft PowerPoint - 30.ppt [호환 모드]](/thumbs/97/130824528.jpg "Microsoft PowerPoint - 30.ppt [호환 모드]") 이중포트메모리의실제적인고장을고려한 Programmable Memory BIST 2010. 06. 29. 연세대학교전기전자공학과박영규, 박재석, 한태우, 강성호 hipyk@soc.yonsei.ac.kr Contents Introduction Proposed Programmable Memory BIST(PMBIST) Algorithm Instruction PMBIST
이중포트메모리의실제적인고장을고려한 Programmable Memory BIST 2010. 06. 29. 연세대학교전기전자공학과박영규, 박재석, 한태우, 강성호 hipyk@soc.yonsei.ac.kr Contents Introduction Proposed Programmable Memory BIST(PMBIST) Algorithm Instruction PMBIST
<3230B4EBBFA9BCBAC3EBBEF7C7F6BDC728C0CCBDB4BAD0BCAE292E687770>
 2대 여성 청년층의 취업현실 개요 2 대는 면학시기 이면서 입직시기, 결혼적령기 등 자신의 생애주기 가운데 가장 다양한 변수를 품고 있는 시기임. 그럼에도 노동시장의 환경은 대다수 2대 여성에게 특정 선택 을 강요하며, 2대 여성들의 취업률은 육아와 가사로 인해 3대 초반부터 감소하기 시 작함. 비경제활동인구 역시 3대에 들어서면서 급격히 늘어나며 이러한 경력단절
2대 여성 청년층의 취업현실 개요 2 대는 면학시기 이면서 입직시기, 결혼적령기 등 자신의 생애주기 가운데 가장 다양한 변수를 품고 있는 시기임. 그럼에도 노동시장의 환경은 대다수 2대 여성에게 특정 선택 을 강요하며, 2대 여성들의 취업률은 육아와 가사로 인해 3대 초반부터 감소하기 시 작함. 비경제활동인구 역시 3대에 들어서면서 급격히 늘어나며 이러한 경력단절
untitled
 Brain & NeuroRehabilitation Vol. 3, No. 2, September, 2010 운동학습을위한새로운치료적접근법 : 가상현실과로봇 국립재활병원뇌졸중재활과 박시운 Motor Learning by Novel Therapeutic Approaches: Virtual Reality and Robotics Si-Woon Park, M.D., MSCR
Brain & NeuroRehabilitation Vol. 3, No. 2, September, 2010 운동학습을위한새로운치료적접근법 : 가상현실과로봇 국립재활병원뇌졸중재활과 박시운 Motor Learning by Novel Therapeutic Approaches: Virtual Reality and Robotics Si-Woon Park, M.D., MSCR
조선해양과 항공기계과 자동차과 일반고등졸업자 특성화고등졸업자 특기자 _ 영어 특기자 _ 중어 급 특기자 _ 일어 2 2 1
 기계과 기계설계과 메카트로닉스과 일반고등졸업자 18 325 18.1 1.7 3.0 2.6 75 특성화고등졸업자 8 202 25.3 1.4 2.0 1.7 21 특기자 _ 영어 5 14 2.8 821.0 6 특기자 _ 중어 2 8 4.0 6 급 258 0 특기자 _ 일어 2 5 2.5 750.0 0 일반고등졸업자 18 209 11.6 1.5 3.1 2.7 64
기계과 기계설계과 메카트로닉스과 일반고등졸업자 18 325 18.1 1.7 3.0 2.6 75 특성화고등졸업자 8 202 25.3 1.4 2.0 1.7 21 특기자 _ 영어 5 14 2.8 821.0 6 특기자 _ 중어 2 8 4.0 6 급 258 0 특기자 _ 일어 2 5 2.5 750.0 0 일반고등졸업자 18 209 11.6 1.5 3.1 2.7 64
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE Jan.; 27(1), ISSN
, ISSN") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 216 Jan.; 27(1), 17. http://dx.doi.org/1.5515/kjkiees.216.27.1.1 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Switch 1.5 GHz
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 216 Jan.; 27(1), 17. http://dx.doi.org/1.5515/kjkiees.216.27.1.1 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Switch 1.5 GHz
¹Ì·¡Æ÷·³-5±âºê·Î¼Å_1228.ps
 미래에 대해 얼마나 알고 계십니까? 새로운 미래, 어떻게 맞이할 것입니까? 오늘보다 나은 내일, 더 큰 미래를 열어갑시다 2014년 아시아 세계경제 33% 차지 / 광컴퓨터 상용화 2016년 대한민국 경제활동 인구 감소 시작 2021년 인공지능 로봇 실용화 2024년 유전자 치료와 암 정복 가능 2025년 중국 세계 1위 경제대국 / 세계인구 80억 돌파 2030년
미래에 대해 얼마나 알고 계십니까? 새로운 미래, 어떻게 맞이할 것입니까? 오늘보다 나은 내일, 더 큰 미래를 열어갑시다 2014년 아시아 세계경제 33% 차지 / 광컴퓨터 상용화 2016년 대한민국 경제활동 인구 감소 시작 2021년 인공지능 로봇 실용화 2024년 유전자 치료와 암 정복 가능 2025년 중국 세계 1위 경제대국 / 세계인구 80억 돌파 2030년
PowerPoint Presentation
 신호조절 (Signal Conditioning) 메카트로닉스 시스템의 구성 ECU 인터페이스 회로 (시그널 컨디셔닝) 마이컴 Model of 기계 시스템 인터페이스 회로 (드라이빙 회로) 센서 액츄에이터 (구동기) 기계 시스템 PN 접합 다이오드 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드 응용회로 [1] 다이오드
신호조절 (Signal Conditioning) 메카트로닉스 시스템의 구성 ECU 인터페이스 회로 (시그널 컨디셔닝) 마이컴 Model of 기계 시스템 인터페이스 회로 (드라이빙 회로) 센서 액츄에이터 (구동기) 기계 시스템 PN 접합 다이오드 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드의 DC 해석과 등가모델 [1] 다이오드 응용회로 [1] 다이오드
장애인건강관리사업
 장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
J Korean Soc Phys Ther Vol.25, No.4, August 2013 The Journal of Korean Society of Physical Therapy plssn elssn X Original articles 가
 J Korean Soc Phys Ther Vol.25, No.4, August 2013 The Journal of Korean Society of Physical Therapy plssn 1229-0475 elssn 2287-156X Original articles 가상현실을이용한조기로봇보조보행훈련이뇌졸중환자에미치는영향 이동순, 이경화, 강태우, 조성태 원광대학교병원재활의학과물리치료실
J Korean Soc Phys Ther Vol.25, No.4, August 2013 The Journal of Korean Society of Physical Therapy plssn 1229-0475 elssn 2287-156X Original articles 가상현실을이용한조기로봇보조보행훈련이뇌졸중환자에미치는영향 이동순, 이경화, 강태우, 조성태 원광대학교병원재활의학과물리치료실
외국인투자유치성과평가기준개발
 2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
2018 학년도입학전형지원및성적현황 정시 ( 일반전형 ) 의수능성적은이해를돕기위하여 3 과목백분위성적을합산한점수 ( 가산점포함 ) 임 ( 실제반영시에는합산점수 ( 가산점포함 ) 에 2/3 을곱하여 200 점으로반영함 ) 지원학과모집시기전형명모집인원지원인원지원율최고성적최
 의수능성적은이해를돕기위하여 3 과목백분위성적을합산한점수 ( 가산점포함 ) 임 ( 실제반영시에는합산점수 ( 가산점포함 ) 에 2/3 을곱하여 200 점으로반영함 ) 지원학과모집시기전형명모집인원지원인원지원율최고성적최") 기계과 기계설계과 수시차수시차수시차 일반과정졸업자 8 4 3.3.7 3..7 7 전문과정졸업자 4 53.9.6.. 5 특기자 ( 영어 ) 외국어 9.5 6 3. 특기자 ( 영어 ) 내신 4.8 특기자 ( 중어 ) 외국어 6급37 5 5. 특기자 ( 중어 ) 내신 5.3 특기자 ( 일어 ) 외국어 835. 특기자 ( 일어 ) 내신 6.6 일반과정졸업자 8 5
기계과 기계설계과 수시차수시차수시차 일반과정졸업자 8 4 3.3.7 3..7 7 전문과정졸업자 4 53.9.6.. 5 특기자 ( 영어 ) 외국어 9.5 6 3. 특기자 ( 영어 ) 내신 4.8 특기자 ( 중어 ) 외국어 6급37 5 5. 특기자 ( 중어 ) 내신 5.3 특기자 ( 일어 ) 외국어 835. 특기자 ( 일어 ) 내신 6.6 일반과정졸업자 8 5
1. 일정 ( ) ( ) ( ), 17: ( ) ( ), 17: ( ) ( ) ( ), 17:0
 ( ) ( ), 17: ( ) ( ), 17: ( ) ( ) ( ), 17:0") < 2014 학년도봄학기 > 일반대학원순수외국인신입학전형모집안내 세종대학교 1 1. 일정 1. 2. ( ) 3. 4. 5. 1 2 3 4 2013.10.01( ) 2013.10.06( ), 17:00 2013.10.01( ) 2013.10.07( ), 17:00 2013.10.22( ) 2013.10.23( ) 2013.11.08( ), 17:00 2013.11.18(
< 2014 학년도봄학기 > 일반대학원순수외국인신입학전형모집안내 세종대학교 1 1. 일정 1. 2. ( ) 3. 4. 5. 1 2 3 4 2013.10.01( ) 2013.10.06( ), 17:00 2013.10.01( ) 2013.10.07( ), 17:00 2013.10.22( ) 2013.10.23( ) 2013.11.08( ), 17:00 2013.11.18(
DBPIA-NURIMEDIA
 Journal of Korean Institute of Intelligent Systems Vol. 25 No. 5 October 2015 pp. 451-456 http://dx.doi.org/10.5391/jkiis.2015.25.5.451 ISSN(Print) ISSN(Online) 1976-9172 2288-2324 이산시간상호결합퍼지시스템을위한관측기기반분산퍼지제어기설계
Journal of Korean Institute of Intelligent Systems Vol. 25 No. 5 October 2015 pp. 451-456 http://dx.doi.org/10.5391/jkiis.2015.25.5.451 ISSN(Print) ISSN(Online) 1976-9172 2288-2324 이산시간상호결합퍼지시스템을위한관측기기반분산퍼지제어기설계
<4D F736F F F696E74202D2031C1D65FC8DEB8D3B3EBC0CCB5E5B0B3BFE45FC7D0BBFDBFEB2E BC8A3C8AF20B8F0B5E55D>
 휴머노이드개발역사 KAIST 휴머노이드로봇시리즈, 2002 ~ 2008 년 Skeleton HUBO HUBO FX-1 2002 2003 2004 2005 2008 KHR-1 KHR-2 HUBO Albert HUBO HUBO-2 휴머노이드개발역사 Video 35 휴머노이드개발역사 SONY QRIO Toyota Partner Johnnie Wabian-2 Sarcos
휴머노이드개발역사 KAIST 휴머노이드로봇시리즈, 2002 ~ 2008 년 Skeleton HUBO HUBO FX-1 2002 2003 2004 2005 2008 KHR-1 KHR-2 HUBO Albert HUBO HUBO-2 휴머노이드개발역사 Video 35 휴머노이드개발역사 SONY QRIO Toyota Partner Johnnie Wabian-2 Sarcos
KRS R1-( )-Final-26.hwp
-Final-26.hwp") 로봇의이동및센싱불확실성이고려된네트워크기반로봇시뮬레이션프로그램 23 로봇의이동및센싱불확실성이고려된네트워크기반로봇시뮬레이션프로그램 Network Based Robot Simulator Implementing Uncertainties in Robot Motion and Sensing 서동진 1, 고낙용, 전세웅 2, 이종배 3 Dong Jin Seo 1, Nak
로봇의이동및센싱불확실성이고려된네트워크기반로봇시뮬레이션프로그램 23 로봇의이동및센싱불확실성이고려된네트워크기반로봇시뮬레이션프로그램 Network Based Robot Simulator Implementing Uncertainties in Robot Motion and Sensing 서동진 1, 고낙용, 전세웅 2, 이종배 3 Dong Jin Seo 1, Nak
* 주 ) ( 일반전형 ) 의수능성적은백분위의합 (3 과목, 300 점만점 ) 을반영한것임 조선해양과 항공기계과 자동차과 일반고등졸업자 특성화고등졸업자 특기자 ( 영어 ) 5 5
 ( 일반전형 ) 의수능성적은백분위의합 (3 과목, 300 점만점 ) 을반영한것임 조선해양과 항공기계과 자동차과 일반고등졸업자 특성화고등졸업자 특기자 ( 영어 ) 5 5") * 주 ) ( 일반전형 ) 의수능성적은백분위의합 (3 과목, 300 점만점 ) 을반영한것임 기계과 기계설계과 메카트로닉스과 일반고등졸업자 18 278 15.4 2.0 3.1 2.7 76 특성화고등졸업자 14 141 10.1 1.4 2.1 1.8 11 특기자 ( 영어 ) 2 4 2.0 922.5 0 특기자 ( 중어 ) 1 1 1.0 5 급 227 0 특기자 (
* 주 ) ( 일반전형 ) 의수능성적은백분위의합 (3 과목, 300 점만점 ) 을반영한것임 기계과 기계설계과 메카트로닉스과 일반고등졸업자 18 278 15.4 2.0 3.1 2.7 76 특성화고등졸업자 14 141 10.1 1.4 2.1 1.8 11 특기자 ( 영어 ) 2 4 2.0 922.5 0 특기자 ( 중어 ) 1 1 1.0 5 급 227 0 특기자 (
수요기반강화 공급역량강화 전망및기대 - 4 -
 주형환산업부장관주요발언 보도자료 2016 년 10 월 11 일 ( 화 ) 석간부터보도하여주시기바랍니다. ( 인터넷, 방송, 통신은 10.11( 화 ) 오전 6 시이후보도가능 ) http://www.motie.go.kr 배포일시 2016. 10. 10. ( 월 ) 담당부서기계로봇과 담당과장정창현과장 (044-203-4310) 담당자이헌두사무관 (044-203-4315)
주형환산업부장관주요발언 보도자료 2016 년 10 월 11 일 ( 화 ) 석간부터보도하여주시기바랍니다. ( 인터넷, 방송, 통신은 10.11( 화 ) 오전 6 시이후보도가능 ) http://www.motie.go.kr 배포일시 2016. 10. 10. ( 월 ) 담당부서기계로봇과 담당과장정창현과장 (044-203-4310) 담당자이헌두사무관 (044-203-4315)
(17-83 호 ) : 고령화로주목받는실버케어로봇활용사례 서비스로봇산업의발전 실버케어로봇분야별활용사례 전망과활성화를위한과제
 : 고령화로주목받는실버케어로봇활용사례 서비스로봇산업의발전 실버케어로봇분야별활용사례 전망과활성화를위한과제") 2017. 11. 06 (17-83 호 ) : 고령화로주목받는실버케어로봇활용사례 서비스로봇산업의발전 실버케어로봇분야별활용사례 전망과활성화를위한과제 로봇은산업분야에사용되는 제조용로봇 과비산업분야에서사용되는 서비스용로봇 으로분류되며향후서비스용로봇산업이큰폭으로성장할것으로예상 인간의삶을도와주는개인서비스용로봇 (Personal Service Robots) 은 2018~2020년약
2017. 11. 06 (17-83 호 ) : 고령화로주목받는실버케어로봇활용사례 서비스로봇산업의발전 실버케어로봇분야별활용사례 전망과활성화를위한과제 로봇은산업분야에사용되는 제조용로봇 과비산업분야에서사용되는 서비스용로봇 으로분류되며향후서비스용로봇산업이큰폭으로성장할것으로예상 인간의삶을도와주는개인서비스용로봇 (Personal Service Robots) 은 2018~2020년약
2016 학년도 2 학기수업계획서 1. 교과목개요 교과목신경물리치료학 1 ( 진단평가 ) 담당교수 수업개요 수업목표 교재및참고서적 수업방법 평가방법 (%) 이병희 윤태원 교과코드 PT2114 연구실 이메일 / 연락처 학점 / 시수수업일및교시강의실 2 / 4 월교시 신경
 담당교수 수업개요 수업목표 교재및참고서적 수업방법 평가방법 (%) 이병희 윤태원 교과코드 PT2114 연구실 이메일 / 연락처 학점 / 시수수업일및교시강의실 2 / 4 월교시 신경") 2016 학년도 2 학기수업계획서 1. 교과목개요 교과목신경물리치료학 1 ( 진단평가 ) 담당교수 수업개요 수업목표 교재및참고서적 수업방법 평가방법 (%) 이병희 윤태원 교과코드 PT2114 연구실 이메일 / 연락처 학점 / 시수수업일및교시강의실 2 / 4 월교시 신경계손상환자를평가하고치료계획을수립하기위하여질병, 손상및기타원인으로인한기능장애, 변 형상태및운동발달상태를치료사의손과기구에의하여검사하고평가할수있는기본적인능력을학
2016 학년도 2 학기수업계획서 1. 교과목개요 교과목신경물리치료학 1 ( 진단평가 ) 담당교수 수업개요 수업목표 교재및참고서적 수업방법 평가방법 (%) 이병희 윤태원 교과코드 PT2114 연구실 이메일 / 연락처 학점 / 시수수업일및교시강의실 2 / 4 월교시 신경계손상환자를평가하고치료계획을수립하기위하여질병, 손상및기타원인으로인한기능장애, 변 형상태및운동발달상태를치료사의손과기구에의하여검사하고평가할수있는기본적인능력을학
2016남서울_수시모집요강_단면.pdf
 Namseoul Univ. 2016 Global NSU 1. 2. 3. 4. 2012 2013 2014 2015 남서울대학교의 대표적인 국제교류 프로그램인 두 개의 학위를 동시에 취득하는 복수학위제도 복수학위제도는 세계를 무대로 펼쳐져 있습니다. 학생들은 학과별로 마련된 복수학위제도를 통해 남서울대학교에서 2년 또는 3년 교육과정을 이수한 후 세계적인 국제교류
Namseoul Univ. 2016 Global NSU 1. 2. 3. 4. 2012 2013 2014 2015 남서울대학교의 대표적인 국제교류 프로그램인 두 개의 학위를 동시에 취득하는 복수학위제도 복수학위제도는 세계를 무대로 펼쳐져 있습니다. 학생들은 학과별로 마련된 복수학위제도를 통해 남서울대학교에서 2년 또는 3년 교육과정을 이수한 후 세계적인 국제교류
마비환자의재활치료 충남대학교병원재활의학과 교수조강희
 마비환자의재활치료 충남대학교병원재활의학과 교수조강희 뇌졸중 ( 중풍 ) 이란? 갑작스러운신경학적결손발생 운동조절의소실, 감각의변화, 인지또는언어의결손, 혹은의식소실등의특징 뇌혈관의폐색또는파열로인한비외상성뇌손상 뇌혈관질환으로분류 General recovery guidelines 10 %: recover almost completely 25 %: recover
마비환자의재활치료 충남대학교병원재활의학과 교수조강희 뇌졸중 ( 중풍 ) 이란? 갑작스러운신경학적결손발생 운동조절의소실, 감각의변화, 인지또는언어의결손, 혹은의식소실등의특징 뇌혈관의폐색또는파열로인한비외상성뇌손상 뇌혈관질환으로분류 General recovery guidelines 10 %: recover almost completely 25 %: recover
목차 Ⅰ. 기본현황 Ⅱ 년도성과평가및시사점 Ⅲ 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬
 증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
레이아웃 1
 Disability & Employment 2011. 8. 제21권 제3호(통권 72호) pp.209~238 장애인의 직업재활을 위한 자기표현력 향상에 관한 집단미술치료 사례연구 임혜숙 서울사회복지대학원대학교 사회복지학과 교수 요 약 본 연구에서는 장애인의 직업재활동기를 강화시키고 지속시키는데 필요한 자기표현력 향상을 위한 집단미술치료의 영향에 관하여 사례연구를
Disability & Employment 2011. 8. 제21권 제3호(통권 72호) pp.209~238 장애인의 직업재활을 위한 자기표현력 향상에 관한 집단미술치료 사례연구 임혜숙 서울사회복지대학원대학교 사회복지학과 교수 요 약 본 연구에서는 장애인의 직업재활동기를 강화시키고 지속시키는데 필요한 자기표현력 향상을 위한 집단미술치료의 영향에 관하여 사례연구를
슬라이드 1
 운동역학 목요일 2, 3, 4 담당 : 박상균교수 ( 운동역학실 : 필승관 3 층 ) : 410-6952 spark@knsu.ac.kr 교재 : 운동역학 ( 핚국운동역학회저 ) 평가 : 출석 (20), 과제 (10), 중간고사 (30), 기말고사 (40) 과대표 : 임양현 > 교재는꼭준비!!! 운동역학실 3 Rules : No Cellular phone( 핸드폰
운동역학 목요일 2, 3, 4 담당 : 박상균교수 ( 운동역학실 : 필승관 3 층 ) : 410-6952 spark@knsu.ac.kr 교재 : 운동역학 ( 핚국운동역학회저 ) 평가 : 출석 (20), 과제 (10), 중간고사 (30), 기말고사 (40) 과대표 : 임양현 > 교재는꼭준비!!! 운동역학실 3 Rules : No Cellular phone( 핸드폰

1
 삼성경제연구소 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68
삼성경제연구소 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68
지능정보연구제 16 권제 1 호 2010 년 3 월 (pp.71~92),.,.,., Support Vector Machines,,., KOSPI200.,. * 지능정보연구제 16 권제 1 호 2010 년 3 월
,.,.,., Support Vector Machines,,., KOSPI200.,. * 지능정보연구제 16 권제 1 호 2010 년 3 월") 지능정보연구제 16 권제 1 호 2010 년 3 월 (pp.71~92),.,.,., Support Vector Machines,,., 2004 5 2009 12 KOSPI200.,. * 2009. 지능정보연구제 16 권제 1 호 2010 년 3 월 김선웅 안현철 社 1), 28 1, 2009, 4. 1. 지능정보연구제 16 권제 1 호 2010 년 3 월 Support
지능정보연구제 16 권제 1 호 2010 년 3 월 (pp.71~92),.,.,., Support Vector Machines,,., 2004 5 2009 12 KOSPI200.,. * 2009. 지능정보연구제 16 권제 1 호 2010 년 3 월 김선웅 안현철 社 1), 28 1, 2009, 4. 1. 지능정보연구제 16 권제 1 호 2010 년 3 월 Support
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. vol. 29, no. 10, Oct ,,. 0.5 %.., cm mm FR4 (ε r =4.4)
") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2018 Oct.; 29(10), 799 804. http://dx.doi.org/10.5515/kjkiees.2018.29.10.799 ISSN 1226-3133 (Print) ISSN 2288-226X (Online) Method
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2018 Oct.; 29(10), 799 804. http://dx.doi.org/10.5515/kjkiees.2018.29.10.799 ISSN 1226-3133 (Print) ISSN 2288-226X (Online) Method
Microsoft Word - Lab.7
 Lab. 1. I-V C Lab. 7. Characterist tics of a Dio 능동필터 ode 1. 실험목표 연산증폭기를이용한저역통과필터 (low-pass filter), filter), 대역통과필터 (band-pass filter) 회로를구성, 연산증폭기능동필터회로를이해 고역통과필터 (high-pass 측정및평가해서 2. 실험회로 A. 연산증폭기능동필터
Lab. 1. I-V C Lab. 7. Characterist tics of a Dio 능동필터 ode 1. 실험목표 연산증폭기를이용한저역통과필터 (low-pass filter), filter), 대역통과필터 (band-pass filter) 회로를구성, 연산증폭기능동필터회로를이해 고역통과필터 (high-pass 측정및평가해서 2. 실험회로 A. 연산증폭기능동필터
미래포럼수정(2.29) 2012.12.29 3:36 PM 페이지3 위너스CTP1번 2540DPI 200LPI 미래에 대해 얼마나 알고 계십니까? 새로운 미래, 어떻게 맞이할 것입니까? 오늘보다 나은 내일, 더 큰 미래를 열어갑시다 2014년 아시아 세계경제 33% 차지
 2012.12.29 3:36 PM 페이지3 위너스CTP1번 2540DPI 200LPI 미래에 대해 얼마나 알고 계십니까? 새로운 미래, 어떻게 맞이할 것입니까? 오늘보다 나은 내일, 더 큰 미래를 열어갑시다 2014년 아시아 세계경제 33% 차지") 미래포럼수정(2.29) 2012.12.29 3:36 PM 페이지3 위너스CTP1번 2540DPI 200LPI 미래에 대해 얼마나 알고 계십니까? 새로운 미래, 어떻게 맞이할 것입니까? 오늘보다 나은 내일, 더 큰 미래를 열어갑시다 2014년 아시아 세계경제 33% 차지 / 광컴퓨터 상용화 2016년 대한민국 경제활동 인구 감소 시작 2021년 인공지능 로봇
미래포럼수정(2.29) 2012.12.29 3:36 PM 페이지3 위너스CTP1번 2540DPI 200LPI 미래에 대해 얼마나 알고 계십니까? 새로운 미래, 어떻게 맞이할 것입니까? 오늘보다 나은 내일, 더 큰 미래를 열어갑시다 2014년 아시아 세계경제 33% 차지 / 광컴퓨터 상용화 2016년 대한민국 경제활동 인구 감소 시작 2021년 인공지능 로봇
TUT brochure Korean pptx
 국립대학 토요하시기술과학대학 Toyohashi University of Technology Korean Toyohashi Campus Master Technology, Create Technology Penang Campus City of Toyohashi 2018..8 Toyohashi University of Technology! 아이치현 Sapporo!
국립대학 토요하시기술과학대학 Toyohashi University of Technology Korean Toyohashi Campus Master Technology, Create Technology Penang Campus City of Toyohashi 2018..8 Toyohashi University of Technology! 아이치현 Sapporo!
³»Áö¼öÁ¤
 Active Directory Active Directory Active Directory Active Directory m Active Directory m Active Directory m Active Directory m Active Directory m Active Directory m Active Directory m Active
Active Directory Active Directory Active Directory Active Directory m Active Directory m Active Directory m Active Directory m Active Directory m Active Directory m Active Directory m Active
")
2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예
 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예") 2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예 Homework #2 [2] 답의예 ( 학생 1): 소폭수정 다양한외부환경을효과적으로검지할수있는센서기술은검지변환, 신호처리및지능화기술등융합 적특성을갖고있음. 현재대부분실용화중심의연구가주류를이루고있으며,
2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예 Homework #2 [2] 답의예 ( 학생 1): 소폭수정 다양한외부환경을효과적으로검지할수있는센서기술은검지변환, 신호처리및지능화기술등융합 적특성을갖고있음. 현재대부분실용화중심의연구가주류를이루고있으며,
<31362DBCDBB8EDBCF62CB0ADC5C2BFEC2CB3EBC7F6C1A42CB9E6B4EBC7F D E687770>
 특수교육재활과학연구 Journal of Special Education & Rehabilitation Science Vol. 51, No. 3, pp. 347~362, 2012. 가상현실프로그램을이용한로봇 - 보행훈련이급성기 척수손상환자의보행능력및일상생활수행능력에 미치는영향 * 송명수 ** ㆍ강태우 *** ㆍ노현정 **** ㆍ방대혁 ***** < 요약 > 본연구는가상현실프로그램을이용한로봇-보행훈련이급성기척수손상환자의보행능력에미치는효과를평가하기위해실시되었다.
특수교육재활과학연구 Journal of Special Education & Rehabilitation Science Vol. 51, No. 3, pp. 347~362, 2012. 가상현실프로그램을이용한로봇 - 보행훈련이급성기 척수손상환자의보행능력및일상생활수행능력에 미치는영향 * 송명수 ** ㆍ강태우 *** ㆍ노현정 **** ㆍ방대혁 ***** < 요약 > 본연구는가상현실프로그램을이용한로봇-보행훈련이급성기척수손상환자의보행능력에미치는효과를평가하기위해실시되었다.
기획 특집 Ⅱ. 어린이 교통사고 현황 먼저 어린이 교통사고 현황을 살펴보면, 표1은 2008년에서 2012년까지 최근 5년간 전국 어린이 교 통사고 발생현황을 나타내고 있다. 1) 표1 13세미만 전국 어린이 교통사고 발생현황 발생년도 발생건수 사망자 부상자 2008
 표1 13세미만 전국 어린이 교통사고 발생현황 발생년도 발생건수 사망자 부상자 2008") The GyeongNam Development 어린이 교통사고 실태와 대책 기획특집 : 어린이 교통안전, 우리 손으로 최재원 도로교통공단 박사 Ⅰ. 들어가며 지난 2013년 2월 경남 창원에서 발생한 어린이 통학버스 교통사고는 태권도장에서 운행하는 차 량에 7살 초등학생이 목숨을 잃은 사건이다. 이렇게 잊을만 하면 해마다 되풀이 되는 어린이 교통사고는 이제
The GyeongNam Development 어린이 교통사고 실태와 대책 기획특집 : 어린이 교통안전, 우리 손으로 최재원 도로교통공단 박사 Ⅰ. 들어가며 지난 2013년 2월 경남 창원에서 발생한 어린이 통학버스 교통사고는 태권도장에서 운행하는 차 량에 7살 초등학생이 목숨을 잃은 사건이다. 이렇게 잊을만 하면 해마다 되풀이 되는 어린이 교통사고는 이제
<C3D6BDC C0CCBDB4202D20BAB9BBE7BABB2E687770>
 * IV. 가정에종사하는컨슈머로봇시장전망 AI, IoT 등의기술발전과집안에서의 ICT 기기보급등에의해 B2C 컨슈머용로봇분야가다시부각되고있음 코트라의 2018년글로벌로봇산업시장동향및진출방안 보고서에의하면로봇의글로벌성장률이제조로봇은 15%, 컨슈머용로봇은 35% 로컨슈머용로봇성장률이훨씬높은것으로예측 컨슈머로봇성장트랜드에는엔터테인먼트용로봇들이중심에있는데, 휴머노이드로봇보다는제작이쉽고원가가싸며,
* IV. 가정에종사하는컨슈머로봇시장전망 AI, IoT 등의기술발전과집안에서의 ICT 기기보급등에의해 B2C 컨슈머용로봇분야가다시부각되고있음 코트라의 2018년글로벌로봇산업시장동향및진출방안 보고서에의하면로봇의글로벌성장률이제조로봇은 15%, 컨슈머용로봇은 35% 로컨슈머용로봇성장률이훨씬높은것으로예측 컨슈머로봇성장트랜드에는엔터테인먼트용로봇들이중심에있는데, 휴머노이드로봇보다는제작이쉽고원가가싸며,
1_12-53(김동희)_.hwp
_.hwp") 본논문은 2012년전력전자학술대회우수추천논문임 Cascaded BuckBoost 컨버터를 이용한 태양광 모듈 집적형 저전압 배터리 충전 장치 개발 472 강압이 가능한 토폴로지를 이용한 연구도 진행되었지만 제어 알고리즘의 용의성과 구조의 간단함 때문에 BuckBoost 컨버터 또는 Sepic 컨버터를 이용하여 연구 가 진행되었다[10][13]. 태양광 발전
본논문은 2012년전력전자학술대회우수추천논문임 Cascaded BuckBoost 컨버터를 이용한 태양광 모듈 집적형 저전압 배터리 충전 장치 개발 472 강압이 가능한 토폴로지를 이용한 연구도 진행되었지만 제어 알고리즘의 용의성과 구조의 간단함 때문에 BuckBoost 컨버터 또는 Sepic 컨버터를 이용하여 연구 가 진행되었다[10][13]. 태양광 발전
<343020B1E8BCBAB0FC2DC1F8B0F820C8EDC2F8B0FA20BAB8C7E0C7FC20C0CCB5BFBFA12E687770>
 Journal of the Korea Academia-Industrial cooperation Society Vol. 18, No. 8 pp. 344-349, 2017 https://doi.org/10.5762/kais.2017.18.8.344 ISSN 1975-4701 / eissn 2288-4688 박수현, 서경준, 김성관 * 공주대학교기계자동차공학부 Development
Journal of the Korea Academia-Industrial cooperation Society Vol. 18, No. 8 pp. 344-349, 2017 https://doi.org/10.5762/kais.2017.18.8.344 ISSN 1975-4701 / eissn 2288-4688 박수현, 서경준, 김성관 * 공주대학교기계자동차공학부 Development
...... .............hwp
 - 1 - - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - - 18 - - 19 - - 20 - - 21 - - 22 - - 23 - - 24 - - 25 - - 26 - - 27 - - 28 - - 29 - 53)
- 1 - - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - - 18 - - 19 - - 20 - - 21 - - 22 - - 23 - - 24 - - 25 - - 26 - - 27 - - 28 - - 29 - 53)
특허청구의 범위 청구항 1 제1 내지 제6 암이 각각의 관절부를 가지며 형성되며, 상기 제1 내지 제6 암 각각은 제1 내지 제6 링크에 의해 링크되고, 상기 제1 내지 제6 암 내부에는 각각의 암을 구동하는 구동모듈이 각각 내장되며, 상기 구동모듈 각각의 선단에는 1
 (19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B25J 9/06 (2006.01) B25J 19/02 (2006.01) (21) 출원번호 10-2011-0079361 (22) 출원일자 2011년08월10일 심사청구일자 2011년08월10일 (65) 공개번호 10-2013-0017122 (43) 공개일자 2013년02월20일
(19) 대한민국특허청(KR) (12) 등록특허공보(B1) (51) 국제특허분류(Int. Cl.) B25J 9/06 (2006.01) B25J 19/02 (2006.01) (21) 출원번호 10-2011-0079361 (22) 출원일자 2011년08월10일 심사청구일자 2011년08월10일 (65) 공개번호 10-2013-0017122 (43) 공개일자 2013년02월20일
01 krs_10_019final.hwp
 임펠러를 이용한 벽면이동로봇의 설계 및 제어 177 임펠러를 이용한 벽면이동로봇의 설계 및 제어 Design and Control of Wall Climbing Robot Using Impeller 구 익 모 1, 송 영 국 2, 문 형 필 3, 박 선 규 4, 최 혁 렬 Ig Mo Koo 1, Young Kouk Song 2, Hyungpil Moon 3,
임펠러를 이용한 벽면이동로봇의 설계 및 제어 177 임펠러를 이용한 벽면이동로봇의 설계 및 제어 Design and Control of Wall Climbing Robot Using Impeller 구 익 모 1, 송 영 국 2, 문 형 필 3, 박 선 규 4, 최 혁 렬 Ig Mo Koo 1, Young Kouk Song 2, Hyungpil Moon 3,
보건산업브리프 요약 헬스케어영역에서최첨단로봇기술을의료및재활복지서비스향상에기여할수있도록접목하고응용하는것이중요한과제로대두 - 세계적인인구고령화와전문의료인력의부족현상심화에따라헬스케어시스템에서로봇이차지하는비중이점점더커질전망 - 수술로봇, 병원로봇, 재활로봇을포함하는보건의료로봇
 보 건 산 업 브 리 프 Vol. www.khidi.or.kr, www.khiss.go.kr 249 Global Insight 글 로 벌 인 사 이 트 보건산업 4차 산업혁명 시리즈: 헬스케어 분야에서의 로봇 활용과 전망 산업통계팀 김수범 Contents 요약 발행일_ 2017. 11. 30 발행처_ 한국보건산업진흥원 발행인_ 이영찬 Ⅰ. 개요 Ⅱ. 주요 분야
보 건 산 업 브 리 프 Vol. www.khidi.or.kr, www.khiss.go.kr 249 Global Insight 글 로 벌 인 사 이 트 보건산업 4차 산업혁명 시리즈: 헬스케어 분야에서의 로봇 활용과 전망 산업통계팀 김수범 Contents 요약 발행일_ 2017. 11. 30 발행처_ 한국보건산업진흥원 발행인_ 이영찬 Ⅰ. 개요 Ⅱ. 주요 분야
DBPIA-NURIMEDIA
 Journal of The Institute of Electronics and Information Engineers Vol.55, NO.5, May 2018 https://doi.org/10.5573/ieie.2018.55.5.89 ISSN 2287-5026(Print) / ISSN 2288-159X(Online) 논문 2018-55-5-10 Artificial
Journal of The Institute of Electronics and Information Engineers Vol.55, NO.5, May 2018 https://doi.org/10.5573/ieie.2018.55.5.89 ISSN 2287-5026(Print) / ISSN 2288-159X(Online) 논문 2018-55-5-10 Artificial
Microsoft PowerPoint - 발표자료(KSSiS 2016)
") Sang Jun Kim, MD, PhD Application of 3D Printing in the Orthotic Fields Hallux Valgus, Charcot Marie Tooth, ADL Kit, Foot Insole, Wrist Pain, Foot Drop Development of Automated Program for Ankle Foot Orthosis
Sang Jun Kim, MD, PhD Application of 3D Printing in the Orthotic Fields Hallux Valgus, Charcot Marie Tooth, ADL Kit, Foot Insole, Wrist Pain, Foot Drop Development of Automated Program for Ankle Foot Orthosis
PowerPoint 프레젠테이션
 hap. 5 능동필터 기본적인필터응답 저역통과필터응답 (low-pass filter (LPF) response) A v( db) V 0log V when X out s 0log f X f X 0log X 0log f Basic LPF response LPF with different roll-off rates 기본적인필터응답 고역통과필터응답 (high-pass
hap. 5 능동필터 기본적인필터응답 저역통과필터응답 (low-pass filter (LPF) response) A v( db) V 0log V when X out s 0log f X f X 0log X 0log f Basic LPF response LPF with different roll-off rates 기본적인필터응답 고역통과필터응답 (high-pass
Neurotherapy 2009;14(1):13-21 al., 2008). 내측광근의근력감소는주로전방십자인대손상, 슬개대퇴통증증후군등슬관절에장해가발생했을때뿐만아니라슬관절에직접적인손상이가해지지않았더라도침상안정을필요로하여장시간동안슬관절신근을사용하지않는편마비등의질환에서도나타
:13-21 al., 2008). 내측광근의근력감소는주로전방십자인대손상, 슬개대퇴통증증후군등슬관절에장해가발생했을때뿐만아니라슬관절에직접적인손상이가해지지않았더라도침상안정을필요로하여장시간동안슬관절신근을사용하지않는편마비등의질환에서도나타") NEUROTHERAPY 2 0 0 9 대한신경치료학회지제14권류호열제1호 후방보행훈련이하지등속성근력및내측광근표면근전도에미치는영향 류호열 연세대학교의료원세브란스재활병원물리치료팀 The Effects of Backward Walking Training on Knee Isokinetic Strength and Vasus Medialis Surface EMG Ho-Youl
NEUROTHERAPY 2 0 0 9 대한신경치료학회지제14권류호열제1호 후방보행훈련이하지등속성근력및내측광근표면근전도에미치는영향 류호열 연세대학교의료원세브란스재활병원물리치료팀 The Effects of Backward Walking Training on Knee Isokinetic Strength and Vasus Medialis Surface EMG Ho-Youl
2011년 제 9회 최우수상.hwp
 1) 고려대학교교육학과석사과정 (nayoung725@yahoo.co.kr) 2) 고려대학교교육학과박사과정 (seo2jin@hanmail.net) 3) 고려대학교교육학과석사과정 (premier110@hanmail.net) 성별지역계열학업진행여부 총사례수 일주일평균아르바이트시간 ( 시간 ) 남 1510 8.9 여 1457 8.4 동지역 2573 8.5
1) 고려대학교교육학과석사과정 (nayoung725@yahoo.co.kr) 2) 고려대학교교육학과박사과정 (seo2jin@hanmail.net) 3) 고려대학교교육학과석사과정 (premier110@hanmail.net) 성별지역계열학업진행여부 총사례수 일주일평균아르바이트시간 ( 시간 ) 남 1510 8.9 여 1457 8.4 동지역 2573 8.5
DBPIA-NURIMEDIA
 論文 15-4-6 李相赫 *, 丁海光 *, 李敎範, 崔世琓 ** ***, 崔宇鎭 요약 ABSTRACT 교신저자 : 정회원, 아주대전자공학부부교수 E-mail : kyl@ajou.ac.kr * 학생회원, 아주대전자공학과석사과정 ** 정회원, 서울산업대제어계측공학과교수 *** 정회원, 숭실대전기공학부조교수접수일자 : 2010. 5. 17 1차심사 : 2010.
論文 15-4-6 李相赫 *, 丁海光 *, 李敎範, 崔世琓 ** ***, 崔宇鎭 요약 ABSTRACT 교신저자 : 정회원, 아주대전자공학부부교수 E-mail : kyl@ajou.ac.kr * 학생회원, 아주대전자공학과석사과정 ** 정회원, 서울산업대제어계측공학과교수 *** 정회원, 숭실대전기공학부조교수접수일자 : 2010. 5. 17 1차심사 : 2010.
기본소득문답2
 응답하라! 기본소득 응답하라! 기본소득 06 Q.01 07 Q.02 08 Q.03 09 Q.04 10 Q.05 11 Q.06 12 Q.07 13 Q.08 14 Q.09 응답하라! 기본소득 contents 16 Q.10 18 Q.11 19 Q.12 20 Q.13 22 Q.14 23 Q.15 24 Q.16 Q.01 기본소득의 개념을 쉽게 설명해주세요. 06 응답하라
응답하라! 기본소득 응답하라! 기본소득 06 Q.01 07 Q.02 08 Q.03 09 Q.04 10 Q.05 11 Q.06 12 Q.07 13 Q.08 14 Q.09 응답하라! 기본소득 contents 16 Q.10 18 Q.11 19 Q.12 20 Q.13 22 Q.14 23 Q.15 24 Q.16 Q.01 기본소득의 개념을 쉽게 설명해주세요. 06 응답하라
ÇÁ·Î±×·¥Áý
 2014 한국군사과학기술학회 종합학술대회 일자 : 2014. 6. 19(목) 6. 20(금) 장소 : 제주 국제컨벤션센터 (305-600) 대전시 유성구 유성우체국 사서함 125호 Tel : 042-821-2203 Fax : 042-823-4605 e-mail : kimst@kimst.or.kr Homepage : http://www.kimst.or.kr KIMST
2014 한국군사과학기술학회 종합학술대회 일자 : 2014. 6. 19(목) 6. 20(금) 장소 : 제주 국제컨벤션센터 (305-600) 대전시 유성구 유성우체국 사서함 125호 Tel : 042-821-2203 Fax : 042-823-4605 e-mail : kimst@kimst.or.kr Homepage : http://www.kimst.or.kr KIMST
ICT À¶ÇÕÃÖÁ¾
 Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
Microsoft PowerPoint - Ch15-1
 h. 5 ctive Filters 기본적인필터응답 (asic filter response) 저역통과필터응답 (low-pass filter (LPF) response) v( db) log when X out s log > πf X f X log π X log ( πf) asic LPF response LPF with different roll-off rates
h. 5 ctive Filters 기본적인필터응답 (asic filter response) 저역통과필터응답 (low-pass filter (LPF) response) v( db) log when X out s log > πf X f X log π X log ( πf) asic LPF response LPF with different roll-off rates
DBPIA-NURIMEDIA
 ISSN 1975-8359(Print) / ISSN 2287-4364(Online) The Transactions of the Korean Institute of Electrical Engineers Vol. 64, No. 1, pp. 136~142, 2015 http://dx.doi.org/10.5370/kiee.2015.64.1.136 충격감소및중력보상을위한이족보행로봇의무릎
ISSN 1975-8359(Print) / ISSN 2287-4364(Online) The Transactions of the Korean Institute of Electrical Engineers Vol. 64, No. 1, pp. 136~142, 2015 http://dx.doi.org/10.5370/kiee.2015.64.1.136 충격감소및중력보상을위한이족보행로봇의무릎
04 Çмú_±â¼ú±â»ç
 42 s p x f p (x) f (x) VOL. 46 NO. 12 2013. 12 43 p j (x) r j n c f max f min v max, j j c j (x) j f (x) v j (x) f (x) v(x) f d (x) f (x) f (x) v(x) v(x) r f 44 r f X(x) Y (x) (x, y) (x, y) f (x, y) VOL.
42 s p x f p (x) f (x) VOL. 46 NO. 12 2013. 12 43 p j (x) r j n c f max f min v max, j j c j (x) j f (x) v j (x) f (x) v(x) f d (x) f (x) f (x) v(x) v(x) r f 44 r f X(x) Y (x) (x, y) (x, y) f (x, y) VOL.
Ⅰ 훈련과정설계 팀또는사업장단위의훈련수요 요구파악후필요한훈련프로그램을디자인하는단계, 사업주직업능력개발훈련과정의인정요건을확인하여적용 1. 훈련과목및훈련시간설계 훈련과정개발단계로, 교육과정안 ( 案 ) 을만드는것 2. 훈련강사및장소섭외 훈련강사 훈련장소 조건 해당분야직업능
 을만드는것 2. 훈련강사및장소섭외 훈련강사 훈련장소 조건 해당분야직업능") 사업주직업능력개발훈련 ( 자체훈련 ) 업무절차 업무단계수행사항등록 ( 첨부 ) 서류유의사항 Ⅰ. 훈련과정설계 훈련수요조사 훈련과목및시간표계획 훈련강사및장소섭외 - 부서또는사업장단위별필요한훈련과정또는내역조사 - 훈련대상선정 ( 인원 ) - 시간표 Ⅱ. 훈련과정인정신청 신청기간 : 훈련개시 5 일전까지, 채용예정자훈련은훈련개시 15 일전까지 ( 업무일기준 18
사업주직업능력개발훈련 ( 자체훈련 ) 업무절차 업무단계수행사항등록 ( 첨부 ) 서류유의사항 Ⅰ. 훈련과정설계 훈련수요조사 훈련과목및시간표계획 훈련강사및장소섭외 - 부서또는사업장단위별필요한훈련과정또는내역조사 - 훈련대상선정 ( 인원 ) - 시간표 Ⅱ. 훈련과정인정신청 신청기간 : 훈련개시 5 일전까지, 채용예정자훈련은훈련개시 15 일전까지 ( 업무일기준 18
목차
 2016. 04. 04 주간금융시장동향 이슈 : 의료용로봇 연. 기금 외국인 시장지표 엄지원 jiwoni75@kasset.co.kr 02-550-6207 본자료는당사가신뢰할만하다고판단되는자료와정보에근거하여작성된것이지만그정확성이나완전성을보장하는것은아닙니다. 따라서개 별투자는고객의판단에의거하여이루어져야하며, 본자료는어떠한형태로도고객의투자판단및그결과에대한법적책임의근거가되지않습니다.
2016. 04. 04 주간금융시장동향 이슈 : 의료용로봇 연. 기금 외국인 시장지표 엄지원 jiwoni75@kasset.co.kr 02-550-6207 본자료는당사가신뢰할만하다고판단되는자료와정보에근거하여작성된것이지만그정확성이나완전성을보장하는것은아닙니다. 따라서개 별투자는고객의판단에의거하여이루어져야하며, 본자료는어떠한형태로도고객의투자판단및그결과에대한법적책임의근거가되지않습니다.
2013 년 Maker's Mark Academy 추석 Program 2013 ~ 2014 년 ACT Test 일정 2013/09/ /10/ /12/ /04/ /6/14 9 월 21 일 ACT 대비추석특강반 ( 이이화 / Jo
 2013 년 Maker's Mark Academy 추석 Program 2013 ~ 2014 년 ACT Test 일정 2013/09/21 2013/10/26 2013/12/14 2014/04/12 2014/6/14 9 월 21 일 ACT 대비추석특강반 ( 이이화 / John Kang / Chris / Jeanne Choi / 고봉기 ) A 반 / Reading
2013 년 Maker's Mark Academy 추석 Program 2013 ~ 2014 년 ACT Test 일정 2013/09/21 2013/10/26 2013/12/14 2014/04/12 2014/6/14 9 월 21 일 ACT 대비추석특강반 ( 이이화 / John Kang / Chris / Jeanne Choi / 고봉기 ) A 반 / Reading
전기전자뉴스레터-여름호수정2
 EE-Newsletter 2011. Volume 2 02 04 05 06 2011 / SUMMER 08 09 10 12 14 16 18 20 02 / EE Newsletter Korea Advanced Institute of Science and Technology / 03 04 / EE Newsletter Korea Advanced Institute of
EE-Newsletter 2011. Volume 2 02 04 05 06 2011 / SUMMER 08 09 10 12 14 16 18 20 02 / EE Newsletter Korea Advanced Institute of Science and Technology / 03 04 / EE Newsletter Korea Advanced Institute of
참고 1 실시간관측부이설치위치및관측항목 참고 2 해운대이안류발생감시및상황전파
 보 도 자 료 10. 21 (금) 배포 일시 총 2011. 10매(본문 2, 붙임 8) 과 장 김옥수, 사무관 임채호, 주무관 이호정 국립해양조사원 담당 해양관측과ㆍ 담 당 자 실 장 이은일, 연구사 권석재 부서 해양과학조사연구실 (032)880-0460 hojeong@korea.kr 보 도 일 시 2011년 10월 24일(월) 석간부터 보도하여 주시기 바랍니다.
보 도 자 료 10. 21 (금) 배포 일시 총 2011. 10매(본문 2, 붙임 8) 과 장 김옥수, 사무관 임채호, 주무관 이호정 국립해양조사원 담당 해양관측과ㆍ 담 당 자 실 장 이은일, 연구사 권석재 부서 해양과학조사연구실 (032)880-0460 hojeong@korea.kr 보 도 일 시 2011년 10월 24일(월) 석간부터 보도하여 주시기 바랍니다.
제주특별자치도교육청 개인정보 내부관리시행계획
 탐라교육원 개인정보보호 내부관리 시행계획 2015. 10. 변화선도 탐 라 교 육 원 Tamna Education Training Institute 탐라교육원 개인정보보호 내부관리 시행계획 Ⅰ. 개인정보 보호책임자 등의 의무와 책임 1. 개인정보 보호책임자 등 지정 가. 탐라교육원의 개인정보의 업무를 총괄해서 책임질 개인정보 보호책임자는 총무부장 으로 지정한다.
탐라교육원 개인정보보호 내부관리 시행계획 2015. 10. 변화선도 탐 라 교 육 원 Tamna Education Training Institute 탐라교육원 개인정보보호 내부관리 시행계획 Ⅰ. 개인정보 보호책임자 등의 의무와 책임 1. 개인정보 보호책임자 등 지정 가. 탐라교육원의 개인정보의 업무를 총괄해서 책임질 개인정보 보호책임자는 총무부장 으로 지정한다.
<BBEAC0E7BAB8C7E820BFE4BEE7A1A4C0E7C8B020BBE7B7CA20BAF1B1B3BFACB1B82E687770>
 산재보험요양 재활사례비교연구 요약 ⅰ 둘 ⅱ 산재보험요양 재활사례비교연구 제 1 장서론 1 2 산재보험요양 재활사례비교연구 제 1 장서론 3 4 산재보험요양 재활사례비교연구 제 1 장서론 5 6 산재보험요양 재활사례비교연구 제 2 장산재보험의요양 재활체계, 내용및비용지출 7 8 산재보험요양 재활사례비교연구 제 2 장산재보험의요양 재활체계, 내용및비용지출
산재보험요양 재활사례비교연구 요약 ⅰ 둘 ⅱ 산재보험요양 재활사례비교연구 제 1 장서론 1 2 산재보험요양 재활사례비교연구 제 1 장서론 3 4 산재보험요양 재활사례비교연구 제 1 장서론 5 6 산재보험요양 재활사례비교연구 제 2 장산재보험의요양 재활체계, 내용및비용지출 7 8 산재보험요양 재활사례비교연구 제 2 장산재보험의요양 재활체계, 내용및비용지출
Contents / 3 / 4 / 5 / 6 / 6 / 8 / 8 / 10 / 10 / 11 / 12 / 12 / 12 2
 www.kmacongress.org 국민을 내 가족처럼 환자를 내 생명처럼 대한의사협회 제33차 종합학술대회 1차 안내서 기 장 주 주 간 소 최 관 : 2011. 5. 13(금) ~ 15(일) 3일간 : 그랜드 힐튼 서울(홍은동 소재) : 대한의사협회 : 대한의사협회 제33차 종합학술대회 조직위원회 1 Contents / 3 / 4 / 5 / 6 / 6 /
www.kmacongress.org 국민을 내 가족처럼 환자를 내 생명처럼 대한의사협회 제33차 종합학술대회 1차 안내서 기 장 주 주 간 소 최 관 : 2011. 5. 13(금) ~ 15(일) 3일간 : 그랜드 힐튼 서울(홍은동 소재) : 대한의사협회 : 대한의사협회 제33차 종합학술대회 조직위원회 1 Contents / 3 / 4 / 5 / 6 / 6 /
<30382DC2F7C7F6B1D42CC1F6BBF3B1B D E687770>
 특수교육재활과학연구 Journal of Special Education & Rehabilitation Science Vol. 51, No. 4, pp. 159~175, 2012. 지역사회보행훈련이뇌졸중환자의하지근활성도 및동적균형능력, 보행척도에미치는효과 차현규 * ㆍ지상구 ** < 요약 > 본연구는뇌졸중으로인한편마비환자에게지역사회보행훈련과트레드밀보행훈련을적용하였을때하지근활성도및동적균형능력,
특수교육재활과학연구 Journal of Special Education & Rehabilitation Science Vol. 51, No. 4, pp. 159~175, 2012. 지역사회보행훈련이뇌졸중환자의하지근활성도 및동적균형능력, 보행척도에미치는효과 차현규 * ㆍ지상구 ** < 요약 > 본연구는뇌졸중으로인한편마비환자에게지역사회보행훈련과트레드밀보행훈련을적용하였을때하지근활성도및동적균형능력,
슬라이드 1
 CHAP 2: 순환 (Recursion) 순환 (recursion) 이란? 알고리즘이나함수가수행도중에자기자신을다시호출하여문제를해결하는기법 정의자체가순환적으로 되어있는경우에적합한방법 순환 (recursion) 의예 팩토리얼값구하기 피보나치수열 1 n! n*( n 1)! fib( n) 0 1 fib( n 2) n n 0 ` 1 fib( n 1) if n 0 if
CHAP 2: 순환 (Recursion) 순환 (recursion) 이란? 알고리즘이나함수가수행도중에자기자신을다시호출하여문제를해결하는기법 정의자체가순환적으로 되어있는경우에적합한방법 순환 (recursion) 의예 팩토리얼값구하기 피보나치수열 1 n! n*( n 1)! fib( n) 0 1 fib( n 2) n n 0 ` 1 fib( n 1) if n 0 if
04 특집
 특집 도서관문화 Vol.51 NO.5(2010.5) 시작하는 말 18 특집 : 소셜 네트워크를 활용한 도서관 서비스 소셜 네트워크란? 19 도서관문화 Vol.51 NO.5(2010.5) 20 특집 : 소셜 네트워크를 활용한 도서관 서비스 소셜 네트워크, 환경에 따라 변모하다 21 도서관문화 Vol.51 NO.5(2010.5) 소셜 네트워크와 도서관을 결합시키다
특집 도서관문화 Vol.51 NO.5(2010.5) 시작하는 말 18 특집 : 소셜 네트워크를 활용한 도서관 서비스 소셜 네트워크란? 19 도서관문화 Vol.51 NO.5(2010.5) 20 특집 : 소셜 네트워크를 활용한 도서관 서비스 소셜 네트워크, 환경에 따라 변모하다 21 도서관문화 Vol.51 NO.5(2010.5) 소셜 네트워크와 도서관을 결합시키다
<4D F736F F D20C3D6BDC C0CCBDB4202D20BAB9BBE7BABB>
 주간기술동향 2017. 4. 5. * I. 상업시설로향하는자율주행로봇, 다음목표는집 다양한센서와컴퓨터비전, 인공지능기능을갖춘상업시설용자율주행로봇들이기업, 쇼핑몰, 병원, 요양시설등에도입되어보안경비와시설관리, 업무생산성향상에기여하고있음. 상업시설용로봇은산업용로봇과가정용로봇의중간지점에자리잡고있으며, 산업용로봇의업무수행기능과가정용로봇에필요한인간과의상호작용기능을겸비하고있음.
주간기술동향 2017. 4. 5. * I. 상업시설로향하는자율주행로봇, 다음목표는집 다양한센서와컴퓨터비전, 인공지능기능을갖춘상업시설용자율주행로봇들이기업, 쇼핑몰, 병원, 요양시설등에도입되어보안경비와시설관리, 업무생산성향상에기여하고있음. 상업시설용로봇은산업용로봇과가정용로봇의중간지점에자리잡고있으며, 산업용로봇의업무수행기능과가정용로봇에필요한인간과의상호작용기능을겸비하고있음.
DBPIA-NURIMEDIA
 韓國電磁波學會論文誌第 21 卷第 12 號 2010 年 12 月論文 2010-21-12-09 Dual-Band Compact Broad Band-Pass Filter with Parallel Coupled Line 최영구 윤기철 이정훈 홍태의 Young-Gu ChoiBhanu Shrestha*Ki-Cheol Yn**Jeong-Hun Lee** Tae-Ui Hong***
韓國電磁波學會論文誌第 21 卷第 12 號 2010 年 12 月論文 2010-21-12-09 Dual-Band Compact Broad Band-Pass Filter with Parallel Coupled Line 최영구 윤기철 이정훈 홍태의 Young-Gu ChoiBhanu Shrestha*Ki-Cheol Yn**Jeong-Hun Lee** Tae-Ui Hong***
untitled
 한국의지ㆍ보조기학회지 : 제 6 권제 1 호 2012 양측전완절단환자에서기능의지와미용의지의동시제작및재활훈련 - 증례보고 - 연세대학교의과대학재활의학교실 신지철ㆍ양혜은ㆍ윤서연ㆍ김나영 Provision of Artificial Hand and Cosmetic Hand and Rehabilitation Training on Bilateral Transradial
한국의지ㆍ보조기학회지 : 제 6 권제 1 호 2012 양측전완절단환자에서기능의지와미용의지의동시제작및재활훈련 - 증례보고 - 연세대학교의과대학재활의학교실 신지철ㆍ양혜은ㆍ윤서연ㆍ김나영 Provision of Artificial Hand and Cosmetic Hand and Rehabilitation Training on Bilateral Transradial
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. vol. 27, no. 8, Aug [3]. ±90,.,,,, 5,,., 0.01, 0.016, 99 %... 선형간섭
![THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. vol. 27, no. 8, Aug [3]. ±90,.,,,, 5,,., 0.01, 0.016, 99 %... 선형간섭](/thumbs/91/107002868.jpg "THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. vol. 27, no. 8, Aug [3]. ±90,.,,,, 5,,., 0.01, 0.016, 99 %... 선형간섭") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2016 Aug.; 27(8), 693700. http://dx.doi.org/10.5515/kjkiees.2016.27.8.693 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Design
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2016 Aug.; 27(8), 693700. http://dx.doi.org/10.5515/kjkiees.2016.27.8.693 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Design
Untitled-1
 영역별 욕구조사 설문지 예시 자료 3 장애인영역 평택시 사회복지시설 욕구조사 실무도움서 _ 201 202 _ 평택복지재단 영역별 욕구조사 설문지 예시 자료 2 3 2 3 평택시 사회복지시설 욕구조사 실무도움서 _ 203 204 _ 평택복지재단 영역별 욕구조사 설문지 예시 자료 2 3 4 평택시 사회복지시설 욕구조사 실무도움서 _ 205 2 3 4 5 6 7
영역별 욕구조사 설문지 예시 자료 3 장애인영역 평택시 사회복지시설 욕구조사 실무도움서 _ 201 202 _ 평택복지재단 영역별 욕구조사 설문지 예시 자료 2 3 2 3 평택시 사회복지시설 욕구조사 실무도움서 _ 203 204 _ 평택복지재단 영역별 욕구조사 설문지 예시 자료 2 3 4 평택시 사회복지시설 욕구조사 실무도움서 _ 205 2 3 4 5 6 7
복지백서내지001~016화보L265턁
 Photo S tory 사진으로 보는 서울의 사회복지 1950년대 아동복지시설 연합 체육대회 (창경원) 3 1950년 삼성농아원 초창기 구화교육 (이진주 선생) 1928년 용정부녀자합동급식소 (명진보육원 전신) 1920년대 초기 태화유치원 교육 1930년대 무산아동운동장 (태화여자관 전경) 1936년 경성양로원 (1927년 설립, 1954년 현재의 청운양로원으로
Photo S tory 사진으로 보는 서울의 사회복지 1950년대 아동복지시설 연합 체육대회 (창경원) 3 1950년 삼성농아원 초창기 구화교육 (이진주 선생) 1928년 용정부녀자합동급식소 (명진보육원 전신) 1920년대 초기 태화유치원 교육 1930년대 무산아동운동장 (태화여자관 전경) 1936년 경성양로원 (1927년 설립, 1954년 현재의 청운양로원으로
<39365FC0CEC4A1C8A32DC8BFC0B2C0FBC0CE20C0FCBDC3B0F8BFACC0BB20C0A7C7D12E687770>
 Journal of the Korea Academia-Industrial cooperation Society Vol. 16, No. 12 pp. 8933-8939, 2015 http://dx.doi.org/10.5762/kais.2015.16.12.8933 ISSN 1975-4701 / eissn 2288-4688 효율적인전시공연을위한멀티소형휴머노이드로봇제어
Journal of the Korea Academia-Industrial cooperation Society Vol. 16, No. 12 pp. 8933-8939, 2015 http://dx.doi.org/10.5762/kais.2015.16.12.8933 ISSN 1975-4701 / eissn 2288-4688 효율적인전시공연을위한멀티소형휴머노이드로봇제어
이보고서는보건복지부에서주관하는국민건강증진기금에의해수행 된것이며, 이보고서에수록된내용은연구자개인적인의견이며보 건복지부의공식견해가아님을밝혀둡니다.
 이보고서는보건복지부에서주관하는국민건강증진기금에의해수행 된것이며, 이보고서에수록된내용은연구자개인적인의견이며보 건복지부의공식견해가아님을밝혀둡니다. 1 2 ɑ 3 SUMMARY 4 ɑ 5 6 7 8 9 10 11 12 13 14 15 16 17 q q 18 q q q q 19 q q q 20 q q q q 21 q q 22 q q q q 23 q q q q 24
이보고서는보건복지부에서주관하는국민건강증진기금에의해수행 된것이며, 이보고서에수록된내용은연구자개인적인의견이며보 건복지부의공식견해가아님을밝혀둡니다. 1 2 ɑ 3 SUMMARY 4 ɑ 5 6 7 8 9 10 11 12 13 14 15 16 17 q q 18 q q q q 19 q q q 20 q q q q 21 q q 22 q q q q 23 q q q q 24
 ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
ë–¼ì‹€ìž’ë£„ì§‚ì‹Ÿì€Ł210x297(77p).pdf
.pdf") 2015 학년도 논술 가이드북 K Y U N G H E E U N I V E R S I T Y 2015 학년도수시모집논술우수자전형 1. 전형일정 논술고사 구분 일정 원서접수 2014. 9. 11( 목 ) 10:00 ~ 15( 월 ) 17:00 고사장확인 2014. 11. 12( 수 ) 전형일 2014. 11. 15( 토 ) ~ 16( 일 ) 합격자발표 2014.
2015 학년도 논술 가이드북 K Y U N G H E E U N I V E R S I T Y 2015 학년도수시모집논술우수자전형 1. 전형일정 논술고사 구분 일정 원서접수 2014. 9. 11( 목 ) 10:00 ~ 15( 월 ) 17:00 고사장확인 2014. 11. 12( 수 ) 전형일 2014. 11. 15( 토 ) ~ 16( 일 ) 합격자발표 2014.
주요활동내용 제 1회연구회워크샵을로봇종합학술대회와연계하여개최 (2월 8일 ) 연구회참여기관들을순회하는워크샵 3회개최 - 제 2회 : 카이스트 (5월 23일 ) - 제 3회 : 한국생산기술연구원 (8월 23일 ) - 제 4회 : 성균관대학교 (11월 24일 ) 2~4회워
 연구회참여기관들을순회하는워크샵 3회개최 - 제 2회 : 카이스트 (5월 23일 ) - 제 3회 : 한국생산기술연구원 (8월 23일 ) - 제 4회 : 성균관대학교 (11월 24일 ) 2~4회워") 연구회운영보고서 1. 개요 연구회명 보행조작기술연구회 성명박재흥직위부교수 연구회책임자 소속전화 - FAX - E-mail - 연구회의목표연구회의필요성주요활동계획타 ( 기존 ) 연구회와차별성및연계성기대효과 보행조작기술연구회에서는휴머노이드로봇과같은이족로봇을비롯한다관절다족로봇의보행기술과핸드를포함한로봇팔을이용한조작기술에대한연구교류를목표로한다. 최근여러다양한환경에서로봇의실질적인로봇활용이활발하게논의되고있다.
연구회운영보고서 1. 개요 연구회명 보행조작기술연구회 성명박재흥직위부교수 연구회책임자 소속전화 - FAX - E-mail - 연구회의목표연구회의필요성주요활동계획타 ( 기존 ) 연구회와차별성및연계성기대효과 보행조작기술연구회에서는휴머노이드로봇과같은이족로봇을비롯한다관절다족로봇의보행기술과핸드를포함한로봇팔을이용한조작기술에대한연구교류를목표로한다. 최근여러다양한환경에서로봇의실질적인로봇활용이활발하게논의되고있다.
<30345FB1E8C1A4C7D12E687770>
 Journal of Institute of Control, Robotics and Systems Vol. 14, No. 2, February 2008 1 관성 센서를 이용한 휴머노이드 로봇용 3축 자세 추정 알고리듬 개발 Development of 3-Dimensional Pose Estimation Algorithm using Inertial Sensors
Journal of Institute of Control, Robotics and Systems Vol. 14, No. 2, February 2008 1 관성 센서를 이용한 휴머노이드 로봇용 3축 자세 추정 알고리듬 개발 Development of 3-Dimensional Pose Estimation Algorithm using Inertial Sensors
08 KRS R1.hwp
 292 Journal of Korea Robotics Society (2012) 7(4):292-298 http://dx.doi.org/10.7746/jkros.2012.7.4.292 ISSN: 1975-6291 / eissn: 2287-3961 실시간임베디드리눅스에서다양한주기적타스크의실시간메커니즘성능분석 On Benchmarking of Real-time
292 Journal of Korea Robotics Society (2012) 7(4):292-298 http://dx.doi.org/10.7746/jkros.2012.7.4.292 ISSN: 1975-6291 / eissn: 2287-3961 실시간임베디드리눅스에서다양한주기적타스크의실시간메커니즘성능분석 On Benchmarking of Real-time
해외정보-로봇2.hwp
 해외 신기술 Insight 2010.11 by Firstep 로봇 신기술 동향 세계 라이프케어 로봇 시장 전망 세계로봇시장은 제조용 로봇을 중심으로 81.3억불 규모를 형성중 이나 향후 서비스 로봇의 중요성이 급증하여 고성장을 주도할 것 으로 예상, 5~10년 후 서비스 로봇이 대규모 시장을 본격적으로 형성할 것으로 예측된다. 국내 로봇 시장은 8,957억
해외 신기술 Insight 2010.11 by Firstep 로봇 신기술 동향 세계 라이프케어 로봇 시장 전망 세계로봇시장은 제조용 로봇을 중심으로 81.3억불 규모를 형성중 이나 향후 서비스 로봇의 중요성이 급증하여 고성장을 주도할 것 으로 예상, 5~10년 후 서비스 로봇이 대규모 시장을 본격적으로 형성할 것으로 예측된다. 국내 로봇 시장은 8,957억
개인용전기자극기의 안전성및성능평가가이드라인
 개인용전기자극기의 안전성및성능평가가이드라인 2014. 3 목 차 1 서론 - 1 - - 2 - - 3 - 2 개인용전기자극기개요 - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 범례 해설: GZJ [통증완화용경피전기신경자극기]: 100개 IPF [재활치료용전동식근육자극기]: 92개 NGX [근육운동용전동식근육자극기]: 28개
개인용전기자극기의 안전성및성능평가가이드라인 2014. 3 목 차 1 서론 - 1 - - 2 - - 3 - 2 개인용전기자극기개요 - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 범례 해설: GZJ [통증완화용경피전기신경자극기]: 100개 IPF [재활치료용전동식근육자극기]: 92개 NGX [근육운동용전동식근육자극기]: 28개
<283329B9DAC0E7C8EF2DC6AFC1FD2831B1B3292E687770>
 HRI 연구동향 : 작업수행을위한로봇사용자인터페이스를중심으로 김준형 김상현 박재흥서울대학교 1. 서론 1.1 HRI (Human-Robot Interaction) 의의미 최근로봇기술이빠르게발전함에따라단순반복작업이요구되는산업현장에서주로활용되던로봇들이인간과능동적으로교감할수있는형태로개발되면서인간이생활하는환경으로들어오고있다. 소프트뱅크의로봇페퍼 (Pepper) 를시작으로
HRI 연구동향 : 작업수행을위한로봇사용자인터페이스를중심으로 김준형 김상현 박재흥서울대학교 1. 서론 1.1 HRI (Human-Robot Interaction) 의의미 최근로봇기술이빠르게발전함에따라단순반복작업이요구되는산업현장에서주로활용되던로봇들이인간과능동적으로교감할수있는형태로개발되면서인간이생활하는환경으로들어오고있다. 소프트뱅크의로봇페퍼 (Pepper) 를시작으로
½½¶óÀ̵å Á¦¸ñ ¾øÀ½
 하나의그룹 FH/FDMA 시스템에서 겹쳐지는슬롯수에따른성능분석 구정우 jwku@eve.yonsei.ac.kr 2000. 4. 27 Coding & Information Theory Lab. Department of Electrical and Computer Engineering, Yonsei Univ. 차례 (Contents) 1. 도입 (Introduction)
하나의그룹 FH/FDMA 시스템에서 겹쳐지는슬롯수에따른성능분석 구정우 jwku@eve.yonsei.ac.kr 2000. 4. 27 Coding & Information Theory Lab. Department of Electrical and Computer Engineering, Yonsei Univ. 차례 (Contents) 1. 도입 (Introduction)
TDB 3000 Series Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO
 Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO DRIVER 의장점을일체화저발열및토크특성우수 TDB 000 V 48 바이폴라 (Bipolar) Closed-Loop 스텝모터드라이버
Full Closed Loop STEP DRIVER의특징 Feedback-Loop로인한진동이없음 감속기없이높은토크구현 높은정밀도 정확한속도제어 SERVO DRIVER의특징 위치유지력 탈조가없음 토크제어가능 STEP DRIVER 와 SERVO DRIVER 의장점을일체화저발열및토크특성우수 TDB 000 V 48 바이폴라 (Bipolar) Closed-Loop 스텝모터드라이버
본문
 Handover Gateway System: A Cell-edge Performance Booster for Next Generation Cellular Mobile Network Eui Chang Jung, Hyun Seok Ryu, Chung G. Kang Dept of Computer Electrical Engineering, Korea University
Handover Gateway System: A Cell-edge Performance Booster for Next Generation Cellular Mobile Network Eui Chang Jung, Hyun Seok Ryu, Chung G. Kang Dept of Computer Electrical Engineering, Korea University