|
|
|
- 보나 묵
- 6 years ago
- Views:
Transcription
1 자율주행 AI 운전능력평가기법및 모형개발에관한연구 Ⅰ
2
3 목 차 Ⅰ. 서론 1 1. 연구의배경및목적 1 1) 연구의배경 1 2) 연구의필요성 2 2. 연구의내용및방법 2 1) 연구의내용 2 2) 연구의방법 3 3. 연구의범위및절차 4 1) 연구의범위 4 2) 연구의절차 4 4. 연구의기대효과 5 Ⅱ. 국내 외자율주행기술개발수준및정책동향분석 6 1. 국내 외자율주행기술개발수준 6 1) 자율주행기술레벨 6 2) 자율주행레벨수준변화및주요요소기술 7 3) 자율주행기술수준 10 4) 국외 10 5) 국내 국내 외자율주행정책동향분석 15 1) 국외정책동향 15 2) 국내정책동향 18 - i -
4 Ⅲ. 국내 외자율주행 AI운전능력평가운영사례분석 개요 24 1) 안전성평가테스트베드 25 2) 정부중심의인프라구축 유럽 27 1) AdaptIVe 28 2) Autonet ) L3Pilot 29 4) ASTAZero( 스웨덴 ) 30 5) UK Centre for Connected and Autonomous Vehicles( 영국 ) 31 6) PEGASUS( 독일 ) 일본 중국 41 1) 자동조종장치차량의도로시험작업가속화에관한베이징시정부지 침 41 2) 베이징시자율차량시험도로도로요건규정 미국 47 1) M-City 47 2) American Center for Mobility(ACM) 48 3) Texas Automated Vehicle Proving Ground Partnership 49 4) SunTrax and the Central Florida Automated Vehicle Partnership 49 5) Iowa AV Proving Grounds, Iowa City, Iowa 49 6) GoMentum Station Contra Costa Transportation Authority, Concord 49 7) A Framework for Automated Driving System Testable Cases and Scenarios, NHTSA 국내 69 1) ITS 기반지능형자동차부품시험장 ( 자동차부품진흥원 ) 69 - ii -
5 2) 자율주행실험도시 (K-City, 교통안전공단 ) 70 3) 기상환경재현도로성능평가시험시설 ( 한국건설기술연구원 ) 72 4) 판교제로시티 ( 경기도 ) 73 5) 대구테크노폴리스 ( 대구시 ) 시사점 75 Ⅳ. 자율주행 AI 운전능력평가기법및모형개발방향설정 77 Ⅴ. 자율주행 AI운전능력평가모형개발기본설계제시 목적 자율주행 AI운전능력평가기본설계 83 1) 운전능력평가시스템의타당성 83 2) 평가방법 84 3) 시뮬레이션 자율주행 AI운전능력평가시스템구성 86 1) 구성도 86 2) 장치설명 87 3) 고장분석 시사점 94 Ⅵ. 결론및향후연구과제 95 [ 참고문헌 ] 98 - iii -
6 표목차 < 표 1> SAE 기준자율주행레벨 6 < 표 2> SAE 기준에따른책임주체변화및운전자사용유무 7 < 표 3> 자율주행상용화목표및추진일정 19 < 표 4> 자율주행상용화실행계획 20 < 표 5> AdaptIVe 자율주행평가시나리오 28 < 표 6> 베이징시자율주행시험요구사항 42 < 표 7> 베이징시자율주행시험평가요소 43 < 표 8> 베이징시자율주행시험요구사항 46 < 표 9> 운영설계영역 (ODD) 분류 ( 구역 ) 52 < 표 10> 운영설계영역 (ODD) 분류 ( 물리적인프라 ) 53 < 표 11> 운영설계영역 (ODD) 분류 ( 운영적제약, 물체, 환경조건, 연결성 ) 54 < 표 12> 레벨3 조건부자율주행의교통정체상황의각종이벤트및관련반응 예시 ( 도로이용자관련 ) 59 < 표 13> 레벨3 조건부자율주행의교통정체상황의각종이벤트및관련반응 예시 ( 비도로이용자관련 ) 60 < 표 14> 레벨3 조건부자율주행의교통정체상황의각종이벤트및관련반응 예시 ( 기타상황 ) 60 < 표 15> K City 시설별평가환경및항목 71 < 표 16> K City 도로구성 72 < 표 17> K City 평가환경및구성요소 72 < 표 18> 자율주행일반센서 88 < 표 19> 자율주행주요센서 88 < 표 20> 자율주행구성요소 89 - iv -
7 그림목차 < 그림 1> 연구절차 4 < 그림 2> 현레벨2 상용화기술과자율주행레벨별예상진입시기 9 < 그림 3> 주요자율주행제조사의기술협력 10 < 그림 4> 국내자율주행제조사의기술협력 13 < 그림 5> 유럽의자율주행자동차기술개발로드맵 15 < 그림 6> 주요국가별자율주행상용화전략 19 < 그림 7> 국토부자율주행안정성평가기본방향 23 < 그림 8> NHTSA의자율주행자동차성능안내서기준 24 < 그림 9> 유럽의자율주행프로젝트현황 26 < 그림 10> 시나리오의종류및예시 27 < 그림 11> L3PILOT 개요 29 < 그림 12> L3PILOT 참여국가, 적용도시, 참여 OEM 현황 29 < 그림 13> 스웨덴 ASTAZero 시험시설구성 30 < 그림 14> 고도자율주행기술개발의현재상황 31 < 그림 15> PEGASUS 프로젝트를통한고도자율주행기술개발촉진계획 32 < 그림 16> PEGASUS 프로젝트개요 32 < 그림 17> PEGASUS 하위프로젝트 34 < 그림 18> 시나리오분석및품질측정 34 < 그림 19> PEGASUS 평가기준관점 35 < 그림 20> PEGASUS 실행프로세스 36 < 그림 21> PEGASUS 시나리오생성 36 < 그림 22> PEGASUS 테스트 37 < 그림 23> PEGASUS 결과반영및탑재 39 < 그림 24> 일본의 LDM 기반자율협력주행개념도 40 - v -
8 < 그림 25> 미국미시간대학교 M City 개념 47 < 그림 26> 미국미시간대학교 M City 전경 48 < 그림 27> 제어시스템의시간수준에따른자율주행시스템의작업요소 51 < 그림 28> ODD 요소분류프레임워크 (NHTSA) 51 < 그림 29> 물리적인프라분류예시 (NHTSA) 55 < 그림 30> 운영적제약및물체분류예시 (NHTSA) 55 < 그림 31> 환경조건분류예시 (NHTSA) 55 < 그림 32> 연결성분류예시 (NHTSA) 56 < 그림 33> 구역분류예시 (NHTSA) 56 < 그림 34> 레벨 3 조건부자율주행의교통정체상황에대해정의된 ODD 예시 (NHTSA) 57 < 그림 35> ODD 환경정의예시 (NHTSA) 57 < 그림 36> OEDR 능력확인과정 (NHTSA) 58 < 그림 37> 자율주행시스템시험및평가방법개발과정 (NHTSA) 62 < 그림 38> 자율주행시험평가방법구조 (NHTSA) 62 < 그림 39> 자율주행시스템시뮬레이션아키텍쳐 (NHTSA) 65 < 그림 40> 테스트요구사항및테스트시나리오의우선순위선정 (NHTSA) 65 < 그림 41> 자율주행시스템폐쇄환경테스트아키텍쳐 (NHTSA) 67 < 그림 42> 자율주행시스템공공도로환경테스트아키텍쳐 (NHTSA) 68 < 그림 43> 자율주행시스템테스트시나리오예시 (NHTSA) 68 < 그림 44> ITS 기반지능형자동차부품시험장 69 < 그림 45> K City 구성 70 < 그림 46> 경기연천기상환경재현도로성능평가시험시설 72 < 그림 47> 판교자율주행자동차시범운행단지개념 73 < 그림 48> 대구자율주행자동차시범운행단지계획 74 < 그림 49> 운전면허시험절차 77 < 그림 50> 기존시험단지의한계및시사점도출 79 - vi -
9 < 그림 51> 기존운전면허시험대비자율주행 AI운전능력평가시험기본설계방 향 81 < 그림 52> 가상환경기반자율주행 AI 운전능력평가시스템 82 < 그림 53> 자율주행 AI운전능력평가시스템개요 84 < 그림 54> 자율주행 AI운전능력평가시스템구성도 86 < 그림 55> 자율주행스마트센서들 87 < 그림 56> 자율주행 AI운전능력평가시스템흐름도 91 - vii -
10 교통안전이란보는것과보여주는것으로표현할수있다. 1) 보는것은접근해오는차량혹은신호를보거나걸어오는보행자를보는것을말한다. 그러나눈에보이는것만본다면본다는개념은매우수동적이고소극적인교통행동일것이다. 그렇다면보는것은무엇일까. 도로를건너려고하면서차가주행하는지를살피때왼쪽에서오는차만살피는것이아니라도로를역주행하는차량까지살피고대비하는것이보는것이다. 또주차된차뒤에어린이가있다면눈에보이지는않지만존재하는것이고언제든지나타날수있는것까지살피는것이적극적인행동의보는것이다. 즉정상적인교통만을보는것이아니고교통법규를위반하는차나눈에보이지않지만언제든지나타날수있는것을예측하는것이진정한보는것자체이다. 다시말해정상적인교통만을보는것이아니고당장눈에보이지는않지만잠재한위험까지예측하고대비하는것이교통안전차원에서보는것이라할수있다. 다음은보여주는것이다. 다른사람이살피지않는곳에있어서도안되고예측하지못하는행동을해서도안된다. 예를들어보행신호가적색으로바뀌어서운전하는보행자가다건너갔을것이라생각하고출발을하는데보행자가횡단보도를뛰어든다면사고가발생할수있다. 또좌우를확인할수없는곳에서갑자기차로로뛰어든다면이곳을지나는동안차량운전자는전혀예측하고대비하지못한다. 즉다른사람들은내가어떤행동을해야미리예측할수있을까생각해야한다. 다른사람들은내가어떤행동을해야미리예측할수있을까가중요하다. 다른사람들의보편적이고상식적인예측의범위를알고그범위내에서행동해야진정으로나를보여주는것이다. 이처럼교통안전은보는것과보여주는것을실수없이정확하게하기위해서는사람을이해할수있어야한다. 상대방은내가어떤행동을기대하는지안다는것은사람을이해하는것이고교통안전의기초는여기에서출발하는것이다. 1) 안전한교통생활지도서, 이재항, 이병일, 도로교통공단, 해당내용재구성 - viii -
11 다시말해운전자나보행자는도로에서자신의행동이어떤영향을끼칠수있을까생각할수있어야한다. 나의행동이다른사람의안전을저해하고사고를유발할수있다는것을생각하고행동할수있어야한다. 결론적으로교통안전의인식과이해가충분히갖춰야안전을기대할수있다. 지난 18년 3월 18일밤 10시 ( 현지시각 ) 미국애리조나템피의한교차로에서자전거를끌고가던 40대여성이자율주행차량에치여숨지는사고가발생하였다. 사고를낸차량은세계최대차량호출업체우버가시범자율주행을하던볼보 X90이었다. 해당사고는기존자율주행차량의다른사고와구별된다. 운전자가아니라보행자사망이라는점에서다. 운전자의사망과부상은자율주행차량구매자와탑승자에국한된문제이나보행자사망은모든사람을자율주행기술의잠재적인피해자로만들수있기때문이다. 교통사고로 1년에 100만명넘게숨지고사고의 90% 이상은운전자잘못인상황이다. 우버사고전에도보행자는차량사고에노출된잠재적인피해자입장이라는점에서마찬가지인데이처럼자율주행차량에높은안전성이요구되는것은무엇일까? 첫째, 자율주행차사고는원인을모르는상태에서발생한다는점에서위험하다. ( 사람이운전하는차의사고는대형사고라도사고원인이밝혀진다. 우버의경우, 센서기능인라이다시스템등으로보행자를감지하도록한기술을갖췄지만왜사망사고가났는지바로밝혀지지않았다.) 둘째, 사람의사고는각각개별적인사고이지만자율주행차량의시스템은네트워크로연결된상태에서구조적인문제로인한사고다. 특정조건에서모든차량이동일한사고를낼수있다는위험을안고있다. 여기서주요논점은우버의보행자사망사고로인해 충분한안전성이확인되지않았는데불구하고기존의방법보다효율성이높은기술과도구를채택할것인가 또는 채택에어떠한기준을요구할것인가 의선택의문제를우리는직면하게되었다. 이것은자율주행기술에대한통제와사용자의기술이해를필요로하는문제다. - ix -
12 지난보행자사망사고가일어난미국애리조나주는사람운전자가없는자율주행운행도허용하는등미국에서는자율주행관련규제에대해완화된하나의주다. 이번사고는자율주행과같은첨단기술에대한사회적 법적규제논의의중요성을일깨운다. 어느나라보다신기술을수용하는데적극적인국내에서도자율주행기술에대한기술적인논의만이아니라문화적 사회적인측면을다루는복합적인논의가요구된다. 자율주행 AI대상으로운전능력평가의기본전제는모든사람이수용하고공감하는교통안전이다. 자율주행주체인주행안전성도중요하지만자율주행주변의객체인보행자및일반운전자등모든교통참여자또한안전을고려해야하는것은주지의사실이다. 따라서안전차원에서기계중심이아닌사람중심의자율주행의운전능력평가가필요하다. 자율주행 AI운전능력평가는이를실현시키는데초점을맞추는것이다. 예를들어생활도로에서마주오는보행자나차량을발견하고차를세우고양보하며주변의위험과안전거리를유지해야하는일련의행위가적정한운전행동인것인가이다. 강조하건데자율주행 AI운전능력평가는일반운전면허보다고차원적이어야하며안전운전정도의수준을요구한다고할수있다. 도로에는눈에보이는위험도있고보이지않는잠재된위험도있다. 또도로를이용하는보행자나자동차등이일반적이고상식적인행동만한다면예측의잘못으로인한사고는발생하지않을것이다. 그러나도로에는교통법규를위반하거나일반적인기대와어긋난행동을하는보행자나운전자가있기때문에이에대한대비를하지않으면안된다. 위험예측이란반드시어떤상황이벌어질것이라고예측하는것이아니라그가능성을예측하고대비하는것이다. 본연구는안전운전차원에서운전능력평가를위한필요성을재확인하고자율주행의안전성확보방안을제시하고자하였다. 또한기존운전면허시험과동일한운전면허철학적접근차원에서자율주행 AI 운전능력평가기법및모형개발설계안을구성해보고자율주행운전면허평가전략을수립하고자하였다. - x -
13 Ⅰ. 서론 1. 연구의배경및목적 1) 연구의배경국내 외자율주행업계는 2020년이후레벨3 자율주행의상용화를목표로기술개발을추진하고있으며, 현재자율주행의차체기술시험및실증중심의특정시설내모의실험환경의구축및운영단계에있다. ( 국외 ) 미국의 M-City, 중국의 Nice City, 일본의자동차연구소 (Japan Automative Research Institute, 이하 JARI) 등이운영및구축단계에있음 ( 국내 ) 자율주행자동차전용실험도시 (K-City) 가구축단계에있음최근들어자율주행자동차도입을대비한국내 자동차관리법 개정되었으며실험환경뿐만아니라실제도로환경에서도차량기술을검증할수있도록국토교통부는 2016년 2월에 자동차관리법 을개정하여자율주행자동차의정의를신설하고시험및연구목적으로운행할수있도록임시운행허가제도를마련하였다. 이에지난 2016년 3월, 현대자동차의최초허가이후임시운행허가사례가지속적으로증가하는추세이다. 그럼에도불구하고자율주행자동차의실제도로주행을위한운전능력및자격평가, 검증및면허제도는여전히미비한실정이다. 앞으로자율주행차량이기존교통환경에혼입될것으로예상됨에따라안전성 효율성등에관한운전능력평가가필요한실정이나기존의운영시스템으로는운전면허관점에서안전차원에서의적격성평가가어렵다. 전세계적으로자율주행의레벨수준이빠르게고도화됨에따라인공지능기반의다양한기술이복합적으로요구되고있다. 현재, 인공지능기반인지 판단 주행전략등을다루는분야의기술개발이다소미흡한실정으로자율주행의상용화를위하여기술적인문제해결을위한노력이필요하고또한자율주행 AI기술은도로및교통환경시스템에전적으로의존하기때문에인공지능기술과도로및교통환경시스템을함께고려한자율주행 AI운전능력평가시스템구축이필요한실정이다
14 최근들어자율주행의기술발전및상용화가진행됨에따라개발된차량이실제도로환경에서무리없이주행가능한지여부를평가하는것이필요하다. 국내의경우자율주행의도로주행을허용하는면허발급기준이마련되지않아시험운행을위한제도적근거수립에초점을맞추고있는실정이며, 현재임시운행허가제도만운영되고있다. 따라서사회적으로공감되고수용가능한자율주행의운전능력평가를위한운전면허시험단지구축의필요성이제기되고있는상황이다. 2) 연구의필요성국외에서의사상사고발생등으로자율주행자동차의안전성문제가대두되고있으며, 이에따라자율주행도입에따른미래교통환경변화에대비한도로이용자의안전성확보가필요한실정이다. 이에따라자율주행자동차운전능력검증을바탕으로장래교통안전문제에대한대비가필요하다. 이에단순한이동성측면에서의검증외에도 도로교통법 을기준으로일반운전자가수용할수있는범위내의위험인식수준, 준법및양보운전등측면에대하여자율주행의운전능력과행태를검증할필요가있다. 본연구는교통안전측면에서자율주행 AI운전능력평가를통하여운전면허를부여하여안전운전환경을조성하는데있다. 따라서향후자율주행 AI운전능력평가시험단지구축시교통안전차원에서의실제적인검증체계를개발하고자운전능력평가 ( 평가정의, 평가요소, 평가지표, 평가시나리오등 ) 기법과모형을단계적으로설계하고이를기반으로자율주행 AI 운전능력평가범위를제시함과동시에향후자율주행 AI 운전능력평가시험단지구축시기본설계안에기초자료에활용하고자한다. 2. 연구의내용및방법 1) 연구의내용본연구는 국내 외자율주행시험평가및운전면허현황분석, 국내 외자율주행인공지능의기술적수준, 자율주행인공지능안정성평가방안 등을비교검토하고자율주행 AI운전능력평가시행결과, 자율주행시스 - 2 -
15 템에운전면허를발급해운행을허가토록하는법적, 제도적, 기술적방안을제시하고자하였다. 더불어자율주행운전능력평가테스트베드구축시 AI운전능력평가요소에의한평가기준및콘텐츠등설계기준및평가모형을개발할예정이다. 따라서본연구는자율주행 AI운전능력평가기법및모형개발에관한연구Ⅰ와 Ⅱ로구분하여수행하고자한다. 해당자율주행 AI 운전능력평가기법및모형개발에관한연구Ⅰ은국내 외자율주행기술개발수준및정책동향, 국내 외자율주행 AI 운전능력평가운영사례분석을통하여자율주행 AI운전능력평가기법및모형개발방향을설정하는데집중하였다. 향후자율주행 AI 운전능력평가기법및모형개발에관한연구Ⅱ은자율주행 AI운전능력평가시험단지구축시평가체계및모형기본설계와자율주행안전평가용플랫폼설계안을제시할예정이다. 또한자율주행 AI 운전자가안전 기능 운행관점에서운전능력평가검증전략을모색할예정이다. 다양한자율주행생태계가제공되는경우교통상황한계점인식및대응정도를분석하고자율주행단계별평가요소및기준도제시할예정이다. 마지막으로자율주행 AI Software 기반주행안전평가기준및평가항목, 평가지표와자율주행기능별안전주행 Test case 연구및자율주행기반평가시나리오를구성할예정이다. 2) 연구의방법 연구기간 : ~12.28.(5 개월간 ) 자체연구과제로수행하였으며최종성과는 예정 전문가자문회의및세미나 ( 전문가의견청취 ) 를운영하였으며 18년도로교통공단정책과제 자율주행 AI 운전능력평가시험단지기획연구 결과를바탕으로수행함 본연구대상인자율주행 AI 운전능력평가기법및모형개발 Ⅰ은국내 외자율주행기술개발수준및자율주행정책동향, AI 운전능력평가운영사례분석을중심으로조사하였으며운전면허학과시험과동일한개념인가상환경운전능력평가시 AI운전능력평가시스템설계안을제시하는데중점을둠 - 3 -
 연구의절차 <")
16 3. 연구의범위및절차 1) 연구의범위 년기준국내 외자율주행기술개발수준과자율주행정책동향분석 국 내 외자율주행 운전능력평가운영사례를중심으로기술하였다 자율주행도 입시교통분야에미치는사회적영향과안전한교통환경조성에주안점을두었다 2) 연구의절차 < 그림 1> 연구절차 - 4 -
17 4. 연구의기대효과본연구는자율주행 운전능력평가 평가기준 평가내용 평가요소 사고기반시나리오설계등 기법과모형을기반으로한자율주행 운전능력자격범위를제시하고향후자율주행 운전능력평가시험단지구축하는데명확성과타당성을재확인하는데기초가될것으로판단된다 또한자율주행안전성과운전능력검증을운전면허제도권에포함하는데기초연구가될것으로기대한다 - 5 -
18 Ⅱ. 국내 외자율주행기술개발수준및정책동향분석 1. 국내 외자율주행기술개발수준 1) 자율주행기술레벨자율주행기술의레벨별수준에대한정의로는일반적으로미국연방도로교통안전국 (National Highway Traffic Safety Administration, NHTSA) 측기준과미국자동차공학회 (Society of Automotive Engineers International, SAE) 측의기준이동시에사용되어왔으나최근에는 SAE에서제시한정의를따르는추세이다. 자율주행레벨에따라기술및도로의자동화단계별운전자의기능을지원하고있다. < 표 1> SAE 기준자율주행레벨 자율주행레벨레벨0 ( 비자동 ) 레벨1 ( 운전자보조 ) 레벨2 ( 부분자율주행 ) 레벨3 ( 조건부자율주행 ) 레벨4 ( 고도의자율주행 ) 레벨5 ( 완전자율주행 ) 내용 항시동적운전에대한모든것을운전자가담당 운전환경정보를이용하여핸들조향및가 감속중에서한가지기능을지원하고그외의다른동적운전은운전자가담당 운전환경정보를이용하여핸들조향및가 감속모두를지원하고그외의다른동적운전은운전자가담당 운전자의적절한대응을전제로모든동적운전을자동화하는단계 운전자의적절한대응없이도모든동적운전을자동화하는단계 사람이운전할수있는모든도로와환경조건에서완전한자동화가가능한단계 출처 : 한국교통연구원 (2016) - 6 -
19 1~2단계 : 운전자지원장치 (Advanced Driver Assistance System, ADAS) 및기초적인수준의군집주행 혼잡구간주행지원이가능함 3단계 : 기초적인수준의고속도로자율주행 ( 진 출입 / 차선유지및변경 추월 / 차간거리유지등 ) 과자율주차에필요한도로및지원기술이적용됨 4단계이상 : 기초적인수준의물류및대중교통 ( 버스 / 트럭 / 택시등 ) 서비스를지원함 ( 인프라 / 경로고정 격리 낮은수준의인프라 / 상대적으로자유로운경로순으로확대 ) < 표 2> SAE 기준에따른책임주체변화및운전자사용유무 자율주행 레벨 (SAE 기준 ) 조향 / 가속 및제동 작동주체 주행환경 모니터링 비상시 대응책임 운전자사용유무 가 감속조향전방주시 2단계운전자 운전자 3단계 시스템 4단계시스템 시스템 5단계 출처 : 한국교통연구원 (2016) 2) 자율주행레벨수준변화및주요요소기술 자율주행관련기술이발전함에따라국내 외에서자율주행에필요한각종단말기와센서등장착의순차적의무화가추진되고있으며, 이를바탕으로해외에서부터 2020년대초중반에걸쳐자율주행상용화에필요한면허 보험 안전및보안 인증분야의법및제도가완비될것으로예상되고있다. 현재운전을보조하는수준의레벨2 자율주행기술인첨단운전자지원시스템 (Advanced Driver Assistance System, ADAS) 상용화완료후해외완성차제조업체를중심으로일부레벨 3~4 자율주행기술의구현이확대되고있다. 대표적인자율주행기술은아래와같다
20 차선유지지원시스템 (Lane Keeping Assist System, LKAS) : 영상인식센서를통하여전방차선을인식하고스티어링휠 ( 핸들 ) 을제어하여차선을유지함 차선변경지원시스템 (Lane Change Assist System, LCA) : 차선변경시에사각지대에위치한차량을감지함 자동긴급제동시스템 (Autonomous Emergency Brake System, AEBS) : 레이더와카메라를통하여전방장애물과의거리를미리인식하여충돌을회피함 도로표지판인식 (Traffic Sign Recognition, TSR) : 표지판을인식하여속도조절, 방향전환및추월을지원함 후 측방충돌회피지원시스템 (Active Blind Spot Detection, ABSD) : 레이더를이용하여차량의후 측방영역을감지하여운전자에게정보를제공함 주차조향보조장치 (Smart Parking Assist System, SPAS) : 장애물감지를통하여자체적으로스티어링휠을조작하고평행및직각주차를수행함 샤시통합제어장치 (Vehicle Stability Management System, VSM) : 곡선및미끄러운도로구간제동시에차량균형을유지함 적응형순항제어 (Advanced Cruise Control, ACC) : 정체및혼잡구간에서가속페달을밟지않아도차량의속도를일정하게유지하며전방차량을감지하여앞차와의거리를일정하게유지함 경사로밀림방지 (Hill Start Assist Control System, HAC) : 오르막길주행시순간제동으로밀림을방지함 혼잡구간주행지원시스템 (Traffic Jam Assist, TJA) : 차간거리제어기능과차선유지기능등을조합하여차선이보이지않는경우에도주변차량의주행 궤적을인지하여선행차량과일정한간격을유지한다. 해외주요완성차제조업체는현재레벨 3~4 자율주행에필요한기술을개발하여, 일반도로에서시험운행을진행함에따라 2025년부터완전자율주행 ( 레벨 4) 이가능할것으로예상하고있다. 국내완성차제조업체는 - 8 -
 라이다 (Light Detection and Ranging, LIDAR) 등의주행환경인식센서와 GPS 기반측위, 도로시설 신호 표지등의정보를제공하는정밀도로지도, 각종시설")
21 세계추세에발맞춰 2020년까지부분자율주행, 2030년까지완전자율주행자동차상용화를목표로하고있다. 운전자의책임소재가급격하게감소되는레벨 3~4 이상의자율주행제작을위해서는정적 동적장애물을인식하는카메라 레이더 (Radio Detection and Ranging, RADAR) 라이다 (Light Detection and Ranging, LIDAR) 등의주행환경인식센서와 GPS 기반측위, 도로시설 신호 표지등의정보를제공하는정밀도로지도, 각종시설 환경및교통정보를교환하는 V2V(Vehicle to Vehicle) 및 V2I(Vehicle to Infra) 등의요소기술이추가적으로필요로한다. 아래그림은자율주행레벨별예상되는진입시기에따른상용화기술에관한로드맵을설명하고있다. < 그림 2> 현레벨 2 상용화기술과자율주행레벨별예상진입시기 출처 : ERTRAC(2015) - 9 -
22 3) 자율주행기술수준글로벌자동차제조사와 ICT기업들은자율주행차주도권선점을위한경쟁이활발히이루어지며, 기술발전속도도매우빠른상황이다. 자율주행제조사는생존을위해차량제조사와 ICT 기업의경계구분자율주행기술개발을위해다양한형태의협력이이루고있다. < 그림 3> 주요자율주행제조사의기술협력 출처 : 국토교통부 4) 국외 2010 년부터 2017 년 6 월까지의전세계자율주행특허출원집계에따르면, BOSCH 의특허출원건수가 958 건으로가장많아, 특히독일기업들의자율 주행특허출원이활발히이루어지고있는것으로나타나고있다. (1) Google-Waymo 미국자율주행기술을선도하는있는 Google 은자율주행차관련 R&D를위해지속적으로주정부와접촉, 공식운행허가를받은 2012년을기점으로하여자율주행시범운행프로젝트를본격화하였으며, 2016년에는자율주행기술개발을위한독립적인기업웨이모 (Waymo) 를설립하였다
23 구글자회사 Waymo 는자율주행공유모빌리티소프트웨어를개발하여, FCA( 피아트- 크라이슬러 ) 의차량과미니밴에적용하고, Lyft가서비스하는자율주행서비스를애리조나주피닉스에서착수중이다. (2) Ford 포드는 2021년까지리프트, 우버등과같은자동차공유플랫폼에자율주행차를선보일계획을가지고있으며, 같은해핸들과페달없는자율주행차생산하는것을목표로하고있다. 향후약 8,400억원을투입하여자율주행제조혁신센터를설립하는등전기차와자율주행차상용화를위해 2020년까지약 5조 4천억원을투자할계획이다. (3) GM 2018년미국의시장조사기관인네비건트리서치의조사결과에따르면, GM은자율주행기술개발에있어가장선도적인그룹으로평가되었다. GM 은자율주행개발팀 (Autonomous Vehicle Development Team) 이자율주행기술개발, 관련업체인수, 플랫폼전략등의업무를전담하고있으며, 2016년자율주행기술벤처기업크루즈오토메이션 (Cruise Automation) 을인수, 관련기술개발에박차를가하고있다. GM은레벨 3, 4 자율주행으로발전하면서, 운전자의부주의로인한사고를줄이고, 안전한자율주행 / 운전자주행전환을지원하는기술개발을위한연구개발을추진하고있으며, 제어권전환상황발생시스티어링휠이나좌석진동, 오디오알람, 비주얼디스플레이활용등을검토중이다. (4) BMW BMW는동작인식, 리모트컨트롤을통한원격주차, 태블릿장치를이용한터치커맨드등의기능이탑재된 NEW 7 시리즈를출시하며, 2020년자율주행차상용화계획을발표하였다
24 (5) AUDI 아우디는볼보와함께 2020 년자율주행차상용화를목표로, 2017 년세계 최초로레벨 3 수준의자율주행기술상용화에성공하였다. (6) 도요타도요타는자율주행차콘셉트아이 (Concept-I) 발표에이어자율주행레벨4 기술개발성공에힘입어 2020년도쿄올림픽에서의공공도로주행을목표로하고있으며, 통신업체 NTT와의협업을통해각사가보유하고있는자동차관련기술과 ICT관련기술을결합하여커넥티드카분야의기술개발및검증, 표준화를추진하고있다. (7) 부품업체미국의 Velodyne 는 Google 자율주행차에라이다센서를공급하고있으며, 독일의 BOSCH 는차량용임베디드소프트웨어개발효율성을극대화하기위해소프트웨어플랫폼을개발중으로소프트웨어개발에특화된연구개발센터를설립하여관련인력을확보하고있다. 5) 국내국내자율주행관련산업은현대자동차 ( 기아차포함 ) 등의완성차기업이독자적으로기술개발중이고, ICT기업도별도의협업없이자체적으로자동주행기술개발을추진하고있으며, 대학교, IT연구소등에서또한자율주행 3~4단계에이르는기술을개발하기위한연구가활발히진행중이다. (1) 현대자동차현대자동차는 2017년 2월에자율주행차연구개발을전담하는 지능형안전기술센터 를신설하여, 자율주행과관련한기초선행부터시험및평가, 본격적인양산차적용까지의자율주행기술과관련한전과정을연구하고있다
25 2018 년 2 월에는차세대수소전기차제네시스 G80 기반자율주행차 (SAE 기준레벨 4 수준 ) 로서울과평창간고속도로약 190 km주행에성공하였다. < 그림 4> 국내자율주행제조사의기술협력 출처 : 국토교통부 남양연구소인근 14km구간에서 V2X 20년서비스상용화를목표로차량테스트를진행중이며, 국토부 R&D과제및 C-ITS 시범사업에참여중이다. 또한현대자동차는 2021년까지제한된장소 ( 스마트시티 ) 에서레벨4 자율주행을구현할예정이며, 현재미국의자율주행솔루션스타트업인오로라 (Autora) 와협력중이다. (2) LG전자 2015년 2월부터 LG전자는 Intel 과의업무협약을통해 5G 기술기반의 V2X 플랫폼공동개발을시작하여, 이결과 2017년 12월국내최초로 LTE 기반의 V2X 단말기를개발하여일반도로에서의자율주행안전기술시연에성공한바있다
26 (3) 삼성전자 삼성전자는 CES 2018 을통해미국전장전문기업 하만 과의협력으로 개발한자율주행차용토탈솔루션 드라이브라인 을공개하였다. (4) SKT 자율주행차임시운행을허가받은 SKT는 2017년자사개발중인자율주행차로경부고속도로약 26km구간의자율시범주행에성공하였고, 산 학 연자율주행공동연구연합체 어라운드얼라이언스 (AROUND Alliance) 을설립하였으며, AI 기반그래픽처리장치업체 엔비디아 와의업무협약을통해 3D 초정밀지도제작, 5G 차세대네트워크기반차량통신 (V2X), 두뇌역할의자율주행플랫폼등에협력하고있다. SKT는국토부의자율주행실험도시 (K-City) 에 5G인프라를구축하여 5G기반자율주행차량지원서비스를선보였으며, 국토부 R&D과제참여를통해 WAVE-LTE 겸용하이브리드 V2X 통신시스템개발, 자율주차기술등에참여중이기도하다. (5) KT KT는국내에서유일하게자율주행버스 (25인승 ) 운영허가를획득하며 2018 년평창동계올림픽에서 5G 자율주행버스를공개, 2018년 1월에는 45인승대형버스의자율주행운행허가를획득하였으며, 2017년에는글로벌차량안전솔루션기업 모빌아이 (Mobileye) 와협력체계를구축하였다. (6) 네이버네이버는도요타프리우스를기반으로제작한자율주행차와 3D기반실내 외지도, 스마트모빌리티분야핵심기술등을 2017 서울모터쇼를통해발표하며, NHTSA 의레벨3에해당하는기술을시연해주목받았고, 2017년 9월에는이스라엘의자율주행차센서 ( 라이다 ) 업체 이노비즈테크놀로지스 에글로벌전장기업과함께 6,500만달러를투자하며자율주행기술협력을강화하고있다
 하였다.")
27 2. 국내 외자율주행정책동향분석 1) 국외정책동향 미국, 유럽, 일본등주요선진국들은자율주행자동차를미래핵심산업 으로설정하고기술개발로드맵작성, 법제도정비, 시험운행등적극지원 < 그림 5> 유럽의자율주행기술개발로드맵 출처 : EPoSS(2015) (1) 미국 미국은자율주행자동차개발의선도국가로자동차업체, IT업체, 최첨단전자기기관련업체등이기술개발에참여 (EPoSS, 2015) 하였다. 자율주행자동차개발의대표업체인구글은 self-driving car project 진행, 테슬라 (Tesla) 는 오토파일럿 을탑재한자율주행차량개발중 자동차개발회사인 GM은 2020년목표로완성형자율주행차량개발중, 특히이모델은차량공유 (car sharing) 라는시스템을기반으로 ' 슈퍼크루즈 라는자율주행기술을적용한모델이라는점에서주목 그러나구글의무인차량은 2009년이후총 12건이상의사고가발생했다는점, 테슬라의자율주행차량을이용하던탑승자가사망한사고가발생했다는점에서아직까지는자율주행차량의안정성에확신을갖지는못하고있는상황
28 미국정부는 2016 년 9 월 오토파일럿 및 자율주행차량관련가이드 라인 발표 (USDOT, 2016) 하였다. 미국도로교통안전국 (NHTSA) 과교통국 (DoT) 이함께참여한이보고서는안전기준심사를포함해자율주행차량과관련된모든법률과제도를다룸 특히기존법과상충되거나중복되는부분을해결하도록하는방안을함께다루고있다는점에서향후자율주행차량의개발과운행활성화에기여기대 미국의 ITS JPO 프로그램에서는 ITS 전략을새롭게수립하고자율주행 자동차와 C-ITS 의효율적연계의중요성과관련프로젝트추진 (USDOT, 2014) 하였다. USDOT(ITS JPO, OST-R) 가수립한 ITS Strategic Plan(2015~2019) 을수립하였는데, 검토된핵심프로그램은총 6개로서이중 Connected Vehicle( 이하 CV 즉, 협력형 ITS) 과자동화 (Automation) 를우선분야 (two program priorities) 로선정해추진중 이를근거로, 공공분야에서추진하는사업이 CV Pilot Deployment( 시범사업 ) 이며, 현재 3개지역 (NYC, ICF-Wyoming, Tampa-Florida) 에서추진중 NYC 정부는 Vision Zero 를제시하고돌발상황정보, 위험도로정보, 노면 기상정보, 위험화물정보등다양한교통안전서비스제공, Wyoming 주는 I-80 Corridor 대상악천후및화물교통관련안전서비스, Tampa 는고속도로가변차로운영등수요대응교통정체및안전관련서비스등각지역의교통문제중특히 교통안전 에초점을맞추어사업추진
29 (2) 유럽 유럽연합을중심으로 1990년대후반부터자율주행차개발프로젝트에착수하였다. 고속도로상에서차량간무선통신기술을토대로군집주행기술을개발한 SARTRE, 도로시설물과의실시간통신을통해자율주행을구현하는기술을개발하는 Vehicle and Road Automation(VRA) 프로젝트등 유럽연합자체와는별도로유럽연합내개별국가들도자체적인자율주행차량기술개발추진 (EPoSS, 2015; Gavriel and Rene, 2015) 하였다. 독일의 BMW는인텔 (Intel) 과손잡고 2021년을목표로자율주행차량연구추진중, BMW는자동차제작, 인텔은자율주행차량을제어하는시스템과컴퓨터개발을각각담당하여완성도높은차량개발을목표 BMW는기본적으로운전하는즐거움을그대로유지한채, 사고발생가능성은제로 (zero) 로수렴시키는방안을차세대먹거리로선택, 즉완전자율주행차량보다인텔리전트드라이브 (intelligent drive) 를통해운전자의불완전한드라이빙을 100% 안전하게제어하는컨셉의차량을개발이목표 스웨덴의볼보 (Volvo) 는유럽연합프로젝트인 SARTRE 에참여한기업으로군집주행기술을개발중, 뿐만아니라대중적인개념의자율주행차량개발에도힘을쏟고있으며 2017년까지스웨덴에서 100대의자율주행차량을실제도로에서테스트할계획 또한유럽의지리적특성에기인하여표준화연구도활발하게진행. ITS전략에서자율주행시스템에주목하여, 준자율주행자동차 (semiautomated vehicles) 와 C-ITS 연계 추진을통해환경오염감소개선유도하였다. (3) 일본 정부주도하에도요타 (Toyota), 닛산 (Nissan), 혼다 (Honda) 등의 6 개자동 차업체는자율주행자동차개발을위한공동연구에착수하였다
30 덴소 (Denso), 파나소닉 (Panasonic) 등인지도높은일본업체들도함께참여 특히주목할만한점은일본자동차업체와 IT통신업체가상호제휴를통해자율주행자동차개발을추진하는데, 혼다와소프트뱅크, 도요타와 KDDI 연계 일본은 C-ITS의일환으로범부처 SIP 11개프로그램중 SIP-adus(automated driving for universal services) 를추진중이다. 기술개발은매년 20~30여개의과제로나누어수행하게되며, 여기의핵심인프라기술로써 Dynamic Map, Connected Vehicle, Human Factors 등관련연구추진 ITS 관련정책도 2015년부터기존 ITS SPOT ETC2.0 으로변경하여안전 (Safety), 정체 (Congestion) 관리, 과적단속 (Oversize/Overweight Vehicle), 스마트물류 (Smart logistics) 등신규서비스추진중이다. 특히, 안전분야는 V2I 기술기반의일환으로전방정보제공을통한운전보조 (Driving Assistance using Look Ahead Information) 등새로운도로주행지원서비스추진중 2) 국내정책동향 (1) 정부정책동향 정부는자율주행자동차기술을미래핵심산업으로설정하고, 해외제작사에비해국내제작사의기술개발이늦은점을감안해 선제적제도정비와인프라조기구축 을통해자율주행자동차를상용하는시기를앞당기는정책을추진중이다. 자율주행차상용화지원방안 ( 제3차규제개혁장관회의, ) 을마련하고, 국내기업의기술개발지원, 시험운행제도정비및시험노선확충등자율주행자동차상용화지원을위한목표및실행계획수립 국토교통부는 자동차관리법개정 ( 공포 ), 자동차관리법시행규칙개정 ( 공포 ) 등자율주행자동차시험운행관련제도정비
 - 차선정보제공 - V2I 지원도로확대 기술개발 - 실험도시구축 - 실도로상 C-ITS 연계 이벤트 고속도로주행지원시스템 ( 일부레벨 2) 상용화 레벨 3 개발착수 (")
31 < 표 3> 자율주행상용화목표및추진일정 구분 2015 년 2018 년 2020 년 목표 범정부지원체계구축 일부레벨 3 평창올림픽시범운행 레벨 3( 부분자율 ) 일부상용화 정부지원 시험운행 - 자율주행차법규정반영 - 허가요건마련 - 실증지구지정착수 - 자율장치장착허용 - 보험상품개발 인프라구축 - GPS 오차개선 인프라구축 - 시험노선정밀수치지형도 - GPS 보정정보송출 - 고속도로테스트베드구축 - 차량간주파수배분 기술개발 - 해킹보안자동차기준반영 - 캠퍼스운행시범 상용화지원 - 자동차기준, 보상품, 리콜검사제도 인프라구축 ( 전국 ) - 차선정보제공 - V2I 지원도로확대 기술개발 - 실험도시구축 - 실도로상 C-ITS 연계 이벤트 고속도로주행지원시스템 ( 일부레벨 2) 상용화 레벨 3 개발착수 ( 완성차 ) 관람객등셔틀서비스제공 ( 안전성, 가능성검증 ) 자율주행차생산판매 출처 : 국토교통부 (2015) < 그림 6> 주요국가별자율주행상용화전략
32 < 표 4> 자율주행상용화실행계획 정책방향주요정책과제소관부처 규제개선및제도정비자율주행기술개발지원자율주행지원인프라확충 < 도로시험운행규제개선 > 시험운행허가제도마련 자율주행시스템임시운행허용 시험운행보험상품개발 자율주행자동차부품테스트및기능안전성강화 < 상용화제도정비 > 자율주행장치관련 자동차기준 마련 자동차보험및리콜검사제도마련 제네바도로교통협약개정에참여 자율주행핵심부품기술개발고도화 ( 산업부 ) 자율주행실증지구지정 자율주행실험도시 (K-City) 구축 해킹예방기술개발및전문인력양성지원 자율주행차근거리시범서비스사업 정밀한위치파악을위한위성항법기술개발 차선표기정밀수치지형도제작 자율주행지원도로인프라개발확충 차량의통신주파수분배 자율주행자동차수용의사회적공감대마련 국토부자동차정책과 국토부자동차운영과 국토부자동차보험팀 산업부 국토부자동차운영과 국토부자동차운영과 국토부자동차운영과 산업부 국토부, 산업부 국토부자동차정책과 국토부, 미래부, 산업부 미래부 국토부신교통개발과 국토부국토지리정보원 국토부첨단도로환경과 미래부 산업부출처 : 국토교통부 (2015)
33 (2) R&D 추진동향 국토교통부는자율주행자동차관련 R&D 사업을추진하고있는데, 대표적으로 스마트자율협력도로시스템기술개발 (2015.7~2020.7) 과 자율주행자동차안전성평가기술개발및실도로평가환경구축 (2016년추진예정 ) 등이다. 그러나국내자율주행자동차관련정책들이기술개발, 제도정비, 시험운행등에편중하고정작자율주행자동차가도시부또는광역도로를운행할때발생하는교통부문의영향, 교통운영방안, 운전자영향등에대한논의는부족하다. 1 첨단안전자동차안전성평가기술개발 ( ~2017.6) 2009년부터 2017년까지정부출연금약 21,300 백만원 ( 총과제예산 28,500백만원 ) 을투입하여첨단안전자동차안전성평가기술개발을수행중임 ( 국토교통과학기술진흥원 a, 2015) 1세부는교통사고사상자감소기술개발을목적으로승객보호장치향상기술, 자전거탑승자및보행자능동보호기술, 인체상해 D/B 구축등을수행함 2세부는안전기준선진화기술개발을목적으로예방안전장치기술에대한안전성평가기술을개발함 3세부는 IT융합기술개발을목적으로 e-post 안전평가기술, LED V2X 통신기술개발, V2X 제어시스템안전성평가기술및 IT융합통합전자파안전성평가기술개발을수행함 현재사고예방안전성 ( 첨단능동안전장치 ) 분야관련하여, 승용 ACC( 적응순항제어장치 ), 승용및상용 AEBS( 자동비상제동장치 ), BSD( 사각지역감지장치 ), AFLS( 조명가변형전조등 ), LKAS( 차선유지지원장치 ), 상용 ESC( 자동차안전성제어장치 ) 등에대한연구가완료됨 2 스마트자율협력주행도로시스템개발 (2015.7~2020.7) 2015 부터 2020 년까지 5 년간정부출연금약 27,500 백만원 ( 총예산약
34 36,515 백만원 ) 투입하여자율주행을수용하기위한첨단도로환경 ( 고속도로기반 ) 구축을목적으로추진중이다.( 국토교통과학기술진흥원 b, 2015) 1세부는자율협력주행을위한도로기반시설고도화기술개발을목적으로고정밀측위지원, 인지성능향상을위한도로시설개선, 교통상충개선등을수행함 2세부는자율협력주행도로운영 관리기술개발을목적으로도로운영 관리방안도출과도로시스템 ( 도로규격등 ) 에대한법 제도개정및표준화를수행함 3세부는자율주행연계협력주행실증기술개발을목적으로차량모듈및 S/W를개발하고,GPS 음영지역해소를위한고정밀측위기술과도로교통에대한정보를받아주행상황에대한판단성능을개선하기위한기술을개발함 4세부는자율협력주행도로시스템테스트베드구축및평가기술개발을목적으로고속도로기반의자율주행을위한테스트베드 ( 통신설비포함 ) 를구축하고운영센터를설치함 3 자율주행자동차안전성평가기술개발및실도로평가환경구축 (2016.7~ ) 2016년부터 2019년까지정부출연금약 18,000 백만원을투입하여실도로운행안전성평가기술및평가환경구현을통한자율주행자동차보급 상용화지원기술개발을목적으로한다.( 국토교통과학기술진흥원, 2016) 1세부는주행및고장안전성평가기술개발을목적으로자율주행자동차의주행 고장안전성평가시스템및평가기술개발, 실도로운행안전성실증평가및검증평가기술개발, 자율주행평가기술활성화방안및활용기술개발을추진함 2세부는통신보안안전성평가기술개발을목적으로차량 / 인프라인증서관리시스템의최적운영및관리방안개발, 차량내부통신보안평가기술을개발함 3세부는실도로평가환경구축을목적으로도시부, 도시고속화도로, 커

35 뮤니티부고속주행환경국성, 도로시설물및통신, 교통시설물구축, 도로유형별평가항목구축및통합활용방안도출등을수행함 < 그림 7> 국토부자율주행안정성평가기본방향 출처 : 국토교통과학기술진흥원

36 Ⅲ. 국내 외자율주행 AI 운전능력평가운영사례분석 1. 개요 자율주행시스템에의해운행되는자율주행은사람인운전자에게부여하는운전면허를대신할별개의면허제도가부재한상황이다. 또한, 자율주행시스템의도입은운전업무에대한운전자의역할을현격히감소시켜차량사고의책임소재에대한모호함을야기할수있어기존의자동차법규제의정비가요구되고있다. 현재전세계적으로다양한자율주행방식에따라법제도를어떻게적용할것인지에대한논란이가중되고있으며, 5년이상준비가진행된미국의경우에도미흡한부분이다수존재한다. 예를들어미국의경우연방과주에서동시에자율주행에대한입법을시도하였고대체로주위주로입법이진행되었으며, 연방의 NHTSA 는포괄적인프레임워크를제시하고있다. 국내의경우자율주행의시험운행과관련된규정은존재하지만실제도로운행을위한법제도는미비한상황이다. 자율주행의상용화를위해서는허가및면허, 교통사고처리등에대한관련법의전반적인정비가필요하다. < 그림 8> NHTSA 의자율주행자동차성능안내서기준 출처 : US DOT, NHTSA(2016)
37 현재세계적으로추진되고있는테스트베드환경에는산업, 정부및학계의여러파트너가있다. 이들대부분은기존시설, 지역자원및전문성을토대로구축된다. 그러나각테스트베드는성능의특정측면을테스트하는데중점을둔다. 이장에서논의할사례검토에서의핵심은다른테스트베드의기능검토를통해자율주행테스트베드의역할을더욱보완하고발전시키는방향과시사점을도출하는것이다. 1) 안전성평가테스트베드도심도로교통환경은복잡하여자율주행차센서만으로는안전하고, 원활한주행에한계가있다. 실제자율주행차상용화를위해서는다양한이용자 ( 운전자, 탑승객 ) 의수용성제고, 복잡한도로교통상황대응과혼잡 / 사고예방, 기존차량과보행자 이륜차등교통약자들의고려가복합적으로필요하다. 자율주행차도입초기단계에는일반차와의혼재로인해도로교통혼잡가중과기존운전자주행과다른형태의사고가발생하여사회문제를야기할수있다. 자율주행도입에따른위험요소로장비및시스템의결함, 사고의법적책임, 주행및통신보안등이제기됨에따라자율주행차안정성검증과평가필요성이점차중요해져, 다양한도로시설을보유한동시에눈, 비, 안개등의악조건주행환경설정이가능하고반복실험이허용되는실도로평가환경, 즉자율주행차테스트베드의필요성이점차증가하고있다. 2) 정부중심의인프라구축미국, 유럽등의자율주행개발선진국들은대규모테스트베드인프라를비롯해실제도로에서의주행테스트를위한도로테스트인프라구축에정부차원의다양한정책을추진하고있다.( 예 : 미국의 M-City, ACM) 우리나라도자율주행실험도시 K-City 와같은자율주행테스트인프라를구축중에있으나, 실제인간운전자와유사한운전능력검증을고려한검증시설은미비한실정이어서, 이와관련한테스트베드의확충이필요한실정이다

38 세계각국은앞다투어자율주행차량기술을개발하고시범운영하고있으며이러한자율주행기술발전은교통안전을향상시킬수있는큰잠재력을제공한다. 자율주행기술이발전함에따라테스트환경의필요성이점차증가하고있으며, 자율주행기술을테스트하기위해사이트가설계, 자금지원및운영이국가주도하에이루어지고있다. 초기테스트는폐쇄코스에서시작하여점차공공도로로옮겨지고있는추세이며, 이장에서는이러한개념하에자율주행평가환경사례를살펴보도록한다. < 그림 9> 유럽의자율주행프로젝트현황 출처 :

39 2. 유럽 2) 유럽은 FP7을통해지능형차량을위한자동주행어플리케이션및기술개발지원 (AdaptIVe) 과자동주행네트워크연구 (Autonet 2030) 등을통해다양한도로교통상황을고려한자율주행시나리오를개발하고있으며, 다양한형태의실차실험을지원중이다. 특히 2017년 9월 Horizon 2020 프로젝트로 L3PILOT 을착수하여자율주행레벨 3, 4의기능에대해 34개기업이참여하여 100대의차량, 1,000명의운전자가참여하는대규모실증실험을추진하고있다. 또한 PEGASUS(Project for the Establishment of Generally Accepted Quality Criteria, Tools and Methods as well as Scenarios and Situations for the Release of Highly Automated Driving Functions) 프로젝트를통해자율주행차량의테스트및상용화의공백을해소하고기존기능및프로토타입생산으로의신속한전개를지원하고있다. PEGASUS 프로젝트는독일연방정부가자금을지원하는공동프로젝트로써, 어떻게자율주행차량이안정적으로작동한다는것을입증하는가에대한질문에답하고있다. < 그림 10> 시나리오의종류및예시출처 : Pegasus (2017) 2) 이부분은한국교통연구원의 자율주행자동차안전성평가기술개발및실도로평가환경구축상세기획연구보고서 (2016, 4) 의내용재구성
40 1) AdaptIVe AdaptIVe(Automated Driving Applications & Technologies for Intelligent Vehicles) 는자율주행수준별다양한교통상황시나리오를통해운전자수용성이향상된자율주행차와인프라가통합되는협력시스템을개발하고, 도로교통법등법 제도를준수하는자율주행시나리오에따른구체적인평가방법론을개발하고시연하고있다. 예산 : 정부 2,500만유로, 민간 1,430만유로 연구기간 : 42개월 (2014~2017) 참여기관 : 폭스바겐 ( 주관 ) 등 28개파트너구성 < 표 5> AdaptIVe 자율주행평가시나리오 자율주행 단계 시나리오 근거리도심고속도로 Lv2 주차지원 (RC) 앞차량추종, 자동회피, 종횡방향제어 진출입, 긴급차량 (V2V) Lv3 차고주차, 주차타워주차, 길거리주차, Stop&Go 자동차선변경, 교차로및로터리추월 협상 (Gap, 차선변경등 ), 위험인지확장, 예측운전, CO2 배출감소, 선행차량추종한교통체증운전 Lv4 Safe Stop 2) Autonet 2030 Autonet 2030은전용도로상에서 4개의협력형자율주행 [ 컨보이드라이빙 ( 다차선군집, 선두차량없이분산통제 ), 합류 ( 컨보이합류 ), 분류 ( 컨보이이탈 ), 협력형차선변경 ( 주변차량과협상하여차선변경 )] Use Case를개발하고, 분산 / 반집중형차량제어기술, 상이한차량플랫폼극복을위한인지레이어, 고정밀위치정확도기술, HMI 어플리케이션개발, 미래차량자동화통합시스템등에대한방향을제시하는프로젝트로구성되어있다
 을수행하여, 기술이슈, 이용자수용성,")

41 예산 : 정부 335 만유로, 민간 125 만유로 연구기간 : 2013~2016 참여기관 : Baselabs, CRF, ARMINES, SCANIA, HITACHI, 드레스덴공대등 3) L3Pilot L3Pilot 은안전하고효율적인교통수단으로서자율주행의경쟁력확보를위해공용도로에서대규모실증 (large-scale piloting) 을수행하여, 기술이슈, 이용자수용성, 운전및여행행태, 교통효율및안전에대한영향을분석한다. 예산 : 정부 6,800만유로, 민간 3,600만유로 연구기간 : 2017.~2021. 참여기관 : 폭스바겐, 아우디, BMW, 벤츠, 포드, 도오타, Autoliv, Delphi, 리즈대, VTT, TNO, bast, 알리안츠등 34개기관 < 그림 11> L3PILOT 개요 < 그림 12> L3PILOT 참여국가, 적용도시, 참여 OEM 현황

42 4) ASTAZero( 스웨덴 ) 스웨덴에서는자율주행자동차를포함한미래형도로교통수단전반에대한안전실증시험시설로스웨덴 SP 기술연구소 (SP Technical Institute) 와 Chalmers 대학교에서공동소유하는 ASTAZero(Active Safety Test Area and Zero) 를 2014년에구축하였다. ASTAZero 는세계최대규모의실제도로재현자동차시험장으로총연장 5.7 km의고속도로시험부와 700m 가속트랙과함께도심환경에관한현대적기반시설내의도로교통상황을종류별로재현하였다. 스웨덴교통국 /TSS(Test Site Sweden)/ 스웨덴국립교통연구소 (VII) 등관련공공기관과볼보 / 오토리브등자국소재완성차및부품제조업체들이공동으로재정을지원하고, 레벨 3 이상자율주행자동차에관련된각종능동안전기술을중점적으로시험하고있다. < 그림 13> 스웨덴 ASTAZero 시험시설구성 출처 :
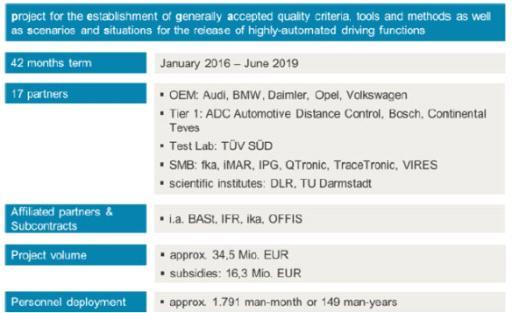
 PEGASUS( 독일 ) 3) (1) 개요 PEGASUS 프로젝트는독일연방정부가자금을지원하는공동프로젝트로써, 과학및산업분야의 17개파트너가기능평가및품질수준평가를위한기준및조치를포함하는완벽한툴체인 (toolchain) 을개발하기위해 PEGASUS 와협력하고있다.")
43 5) UK Centre for Connected and Autonomous Vehicles( 영국 ) 영국은기존역량, 테스트베드및시뮬레이션을개발하고강화하려는욕구및이러한역량을강화하기위한정부투자에대한관심을반영하여, 런던 ( 그리니치 ), 코번트리, 밀턴케인즈, 브리스톨, 옥스퍼드, 크랜필드간선도로에자율주행테스트환경을구축하였으며, 이는실제환경테스트의필요성과새로운환경을테스트하기위한통제된시설을충족하기위함이다. 6) PEGASUS( 독일 ) 3) (1) 개요 PEGASUS 프로젝트는독일연방정부가자금을지원하는공동프로젝트로써, 과학및산업분야의 17개파트너가기능평가및품질수준평가를위한기준및조치를포함하는완벽한툴체인 (toolchain) 을개발하기위해 PEGASUS 와협력하고있다. 툴체인은프로젝트내에서프로토타입으로개발되고실제로실증된다. 그결과는자율주행기능의안전성을보장하고후속상용화및승인을위한준비과정을마련하기위해모든제조업체에서기술및엔지니어링분야의새로운최첨단기술이될것으로전망된다. < 그림 14> 고도자율주행기술개발의현재상황 3) 이부분은 Road Vehicle Automation 5 (Springer, 2018) 의 PEGASUS First Steps for the Safe Introduction of Automated Driving 의내용재구성
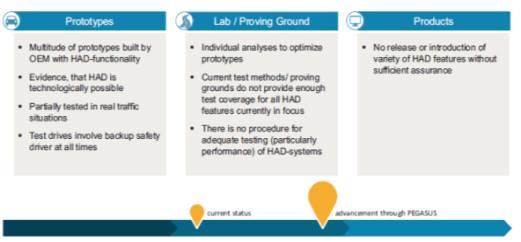
44 < 그림 15> PEGASUS 프로젝트를통한고도자율주행기술개발촉진계획 < 그림 16> PEGASUS 프로젝트개요
45 툴체인의실제기능을개발하기위해응용프로그램예제로 Highway Chauffeur 를사용하여구현및유효성검사가수행된다. 이프로젝트는네가지하위프로젝트로진행된다. 하위프로젝트 1 " 시나리오분석및품질측정에서는 Highway Chauffeur 예제애플리케이션, 사람및기계성능, 평가에사용된기준및측정방법을정의한다. 프로젝트 2 " 구현프로세스 는자동차산업에서현재구축된안전프로세스를분석하여고도자율주행기능을위한새롭거나확장된프로세스방법론으로전송하고실제테스트를위한프로세스사양을작업한다. 프로젝트 3 테스트 는 Lab 테스트, 테스트현장및실제교통상황에서테스트를수행하는방법과도구를개발한다. 여기서의목적은시뮬레이션에서가능한한많은테스트를다루는것이다. (2) 자율주행을위한시나리오와품질측정고도자율주행시스템의효율적인테스트를보장하기위해서는많은양의다양한정보가유용하고필요하다. 이정보에는시스템의성능과품질을평가할수있는시나리오, 적합한기준및조치가포함된다. 기술시스템과함께자율주행시스템의요구사항을파악하고최소한트래픽의품질은동일하게유지하기위해벤치마크용인적성능을정량화하는것이중요하다. Highway Chauffeur 예제어플리케이션은모든서브프로젝트의모든조사및개발을위한현실적인기반으로간주된다. Highway Chauffeur 를기반으로중요한교통상황, 사람및기계용량을결정하기위한도구가만들어진다. 데이터세트는사고데이터베이스, 자연주의적운전연구, 현장운전테스트또는운전시뮬레이터연구와같은기존정보소스로구성된다. 이러한데이터는프로젝트내에서개발된측정항목을사용하여중요한상황에대해효율적이고자동으로평가된다. 이상황에서의인간의수행에관한관련결론은결과로부터도출될수있고시스템의성능과비교될수있다. 해당결과는사고회피가능성과동일시할수있는자율주행기능의유효성을결정한다. 후속확률의평가와확인된중대한상황을통제하는자율주행시스템의능력으로부터, 획득한결과를효율적으로사용하기위해시험사양데이터베이스에입력된다


46 다른서브프로젝트들도이데이터베이스에접근할수있고, 데이터를사 용하고추가하고유사하게여기에데이터를저장한다. 따라서테스트에직접 필요한모든프로젝트결과는중앙데이터베이스에서얻을수있다. < 그림 17> PEGASUS 하위프로젝트 < 그림 18> 시나리오분석및품질측정
 의초기단계에초점을맞춰기존및기존의측정기준및프로세스 ( 기능안전포함 ) 의필수수정사항을결정한다. 실제테스트를수행하기위해시뮬레이션, 테스트사이트및현장테스트요구사항및가이드라인및템플릿형태의테스트문서가정의된다. 그결과는고도자율주행에적합한개발프로세스분야에서새롭고통일된최첨단기술이될것이다.")
47 (3) 안전수립에필요한프로세스가능한한일관성있는재현가능하고유사한방식으로요구사항및품질측정치를평가할수있으려면근본적으로유사하지만모든제조사에서사용할수있도록충분히유연해야한다. 따라서고도의자동화된차량에대한통합테스트를수행하기위해서는자동차산업의기존프로세스를프로세스분석및수정하고혁신적인개념을검토해야한다. 이를위해 PEGASUS 는제품개발모델 (V- 모델 ) 의초기단계에초점을맞춰기존및기존의측정기준및프로세스 ( 기능안전포함 ) 의필수수정사항을결정한다. 실제테스트를수행하기위해시뮬레이션, 테스트사이트및현장테스트요구사항및가이드라인및템플릿형태의테스트문서가정의된다. 그결과는고도자율주행에적합한개발프로세스분야에서새롭고통일된최첨단기술이될것이다. < 그림 19> PEGASUS 평가기준관점


48 < 그림 20> PEGASUS 실행프로세스 (4) 실제테스트안전한고도자율주행기능을달성하려면이기능이모든예상주행상황을처리할수있으며따라서 " 안전함 " 이보장되어야한다. 수반되는증명이현장시험, 시험장시험또는실험실 / 시뮬레이터를통해이루어질지여부는공개되어있다. 도로에서이테스트를수행했다면이는비경제적이고자동차개발사이클의시간제약조건과맞지않을것이다. < 그림 21> PEGASUS 시나리오생성
 가밀접하게결합되어서로보완한다.")
49 따라서실제테스트에서 PEGAGUS 는실험실에서의시뮬레이션에서가능한가장큰테스트적용범위를달성하는데중점을둔다. 그럼에도불구하고순전히시뮬레이션에서모든테스트를완료할수는없다. 예를들어센서기술분야의여러모델은이것이가능한많은약점을여전히보여주고있다. 시뮬레이션을통한테스트결과는테스트근거및현장테스트에서검증되어야한다. 이때기능시나리오는모든테스트의기초이다. 지정된매개변수공간을갖는다음논리적시나리오는기능적시나리오에서개발된다. 이공간전달에서구체적인매개변수세트로인스턴스화된시나리오를구체적인시나리오라고한다. 시험준비에서어떤환경에서어떤시험을할것인가에대한내용으로써, 여기서는세가지테스트요소 ( 시뮬레이션, 테스트사이트, 필드테스트 ) 가밀접하게결합되어서로보완한다. 따라서테스트사이트테스트는시뮬레이션실행을확인하고필드테스트는차례로결과를확인한다. 모든테스트실행의기본은이전에개발된시나리오및품질수준과테스트를위해작성된프로세스및지침이다. 이정보와테스트결과는테스트사양데이터베이스에서중앙에서사용할수있다. 시험자료의양과질은새로운자료와발견사항을추가함으로써지속적으로증가될수있다. 결과목적과유용성에대한실용적인적합성을시연, 테스트및평가할수있도록예제로 PEGASUS 에툴체인이포함된다. < 그림 22> PEGASUS 테스트
50 테스트가표준을준수하기위해서는일부영역에서패러다임전환이필요하다고생각하는방식을변경해야한다. 센서에서작동기에이르기까지시스템무결성과관련된모든구성요소의상태를여기서볼수있다. 기능제한은시뮬레이터실행및설정된시나리오를사용하여결정된다. 이러한한계를따라테스트하여전체기능공간을설정한다. 이정의된테스트공간은주로예상되는기능제한을따라테스트사이트에서확인할수있다. 복잡한차량시스템의완전한시스템지식이필요한 " 설계에의한안전성 " 접근법의목적은테스트커버리지를위한시나리오와방법을체계적으로생성하여기능한계내에서완벽성을보장하는것이다. 시뮬레이션시뮬레이션및실험실환경을사용한효율적인테스트를위한이상적인기준은테스트가재현성있고비용 효과적이며가능한완벽해야한다는것이다. 따라서이상적인경우예상되는결과와광범위한상황및환경조건을모든차량구성요소를통합하여시뮬레이션에서살펴본다. 비교가능하고일관된테스트를수행하기위해 PEGASUS 는테스트케이스및테스트결과를위한통일된기술형식에의존한다. 툴체인의개별요소에대한모델, 인터페이스, 형식및도구에도동일하게적용되므로가상테스트를위한모듈식도구상자가된다. 시험장시험툴박스와같이가장유연한테스트를가능하게하기위해서로자유롭게결합할수있는신규및기존테스트사이트설비 / 테스트장비는테스트해야할요구사항및상황에따라선택되어사용된다. PEGAGUS 는이에대한일반적인접근법을제공하여필요한품질기준을실제로입증할수있다. 시뮬레이션결과는테스트준비를기반으로검증된다. 필드검증 마지막유효성검사단계에서현장검증은시뮬레이션및테스트사이트
 개념증명 / 결과전달결과를프로젝트파트너의제품개발에지속적으로이전하는것이 PEGASUS 공동프로젝트의핵심목표중하나이다. 이를위해서는방법, 프로세스및도구의형태로달성된결과가충분히견고하고효율적이어야한다. 따라서프로젝트전체에걸쳐개념증명과성숙도관리시스템을사용하는개별필수요소에대한지속적인총알포인트스타일검사가사용된다. 동시에요구사항분석의일관성이최종테스트까지보장된다.")
51 결과의유효성을검사한다. 특히현장에서트래픽과행동으로정의된고도자율주행시스템을성공적으로도입하기위한요구사항을실제환경에서검증해야하는중요한상황이고려된다. 이것은또한 "replay2simulation" 프로세스에서테스트데이터베이스에입력될수있는새로운교통상황을가져오고추가조사에사용할수있다. (5) 개념증명 / 결과전달결과를프로젝트파트너의제품개발에지속적으로이전하는것이 PEGASUS 공동프로젝트의핵심목표중하나이다. 이를위해서는방법, 프로세스및도구의형태로달성된결과가충분히견고하고효율적이어야한다. 따라서프로젝트전체에걸쳐개념증명과성숙도관리시스템을사용하는개별필수요소에대한지속적인총알포인트스타일검사가사용된다. 동시에요구사항분석의일관성이최종테스트까지보장된다. 이체인의추적가능성은추적가능성개념을사용하여평가된다. 이는완벽한재평가를수행할필요없이요구사항이변함에따라목표지점에있는개별지점에서테스트케이스를신속하고효율적으로적용할수있는기회를제공한다. < 그림 23> PEGASUS 결과반영및탑재

52 (6) 결론및전망과학과산업계의주파트너가고도자율주행기능의출시를위한새로운기준과표준을정의하기위해 PEGASUS 프로젝트에서협력하고있다. 현재운전자보조시스템에서사용되는현재의테스트절차는고도의자동화된운전자기능을위해서는너무많은시간과비용이소요되고, 가장중요한것은각제조업체에한정되어있기때문에추가작업없이는간단히사용할수없다. PEGAGUS 를통해우리는앞으로연구개발프로젝트의결과뿐만아니라기존의차량프로토타입을시판용제품으로신속하고효율적으로이전할수있게될것이다. 2019년 6월까지프로젝트파트너는고도자율주행기능을검증하고 Highway Chauffeur 예제시스템을사용하여이를입증하는일반적으로인정되는방법과도구를개발하고있다. 3. 일본 일본은 20 년을목표로세계최첨단 ITS 를활용한자동주행시스템구축을 목표로하고있으며, 2014 년 6 월 개혁 2020 프로젝트추진중이다. < 그림 24> 일본의 LDM 기반자율협력주행개념도
53 2014년창조혁신프로그램의하나인 SIP-adus( 자동주행시스템 ) 프로젝트의연구결과검증을위해 2017년말부터혼합교통류에대한공용도로시험을추진하였으며, 자율협력주행을위한 3차원고정밀전자지도데이터, 데이터수집 / 유통방법및활용등에대한연구와보행자, 교차로신호정보제공서비스등 C-ITS연계도심도로자율협력주행서비스실증을추진하고있다. 4. 중국 중국정부의 ' 자율주행자동차도로주행테스트관련업무추진을위한가이드 ' 발표에따라베이징시는 2018년 2월 9일부터자율주행자동차에대한성능테스트를위한폐쇄형시험장운영을시작하였다. 또베이징시는공도에서의테스트를위해실제도로주행이가능하도록베이징경제기술개발구와순이구, 하이뎬구내의 33개총 105km 도로를개방하였다. 베이징시에따르면폐쇄형시험장에서의테스트는난이도가일반인의면허시험취득수준이며, 폐쇄된환경에서기본능력에대한테스트를거친이후시내도로에서실제도로주행에임할수있다. 본연구에서는베이징시자율주행시험제도와관련하여, 자동조종장치차량의도로시험작업가속화에관한베이징시정부지침 과 베이징시자율차량시험도로도로요건규정 문헌을검토하였다. 1) 자동조종장치차량의도로시험작업가속화에관한베이징시정부지침이문헌에서는자율주행시험을위한정부의지침을다루고있으며, 구체적으로관련용어정의와기관별역할, 시험의요구사항, 시험의관리와같은행정사항들을다루고있다. 자율주행, 자율주행모드등관련용어정의와관련하여, 자율주행기능에포함사항 ( 조향, 자동차선변경등 ) 및불포함사항 ( 충돌방지시스템, 보조지원시스템등 ) 을명확히함으로써자율주행시험시, 시험할기능을정의하고있으며, 기관별역할정립과관련해시험기관, 베이징시인민정부, 시험관리기관및단체의역할과책임을정립하고있다. 시험요구사항에서는시험차량, 보조운전자, 제조사의요건을규정하고있
54 으며, 자율주행시험관리기관이시험대상자료를접수한후 20일근무일이내에감사의견을발급하도록규정하고있다. 시험관리및행정사항에서는시험관리기관은전문가의검토의견에따라, 전문가위원회를구성하여운영할것을요구하고있으며, 시험관리기관은시험차량과시험도로측에장비를설치하여시험대상의시험과정을감독할수있는권한을부여하고있다. 이때, 제조사는시험결과를가지고차량관리부서에시험차량의임시차량허가를신청해야한다고규정하고있으며, 시험차량의임시차량번호판이만료되면시스템의주요업그레이드또는시험차량의변경을거치므로면허시험을다시신청해야한다고규정하고있다. 해당지침에서특이할만한점은시험중사고책임에대한사항을규정하고있다는점인데, 베이징시의지침에서는주행시험중사고발생시, 시험운전자는즉시시험을중단하고동시에시험주행시험관리기관에보고하고, 교통사고발생후 24 시간이내에시험피험자는자동조종장치시험관리기관에정해진시간동안자율주행기록데이터를보고하며, 사고책임판정후 10 일이내에사고대상판정결과및원인분석보고서등관련자료를자율주행시험관리기관에제출할것을요구하고있다. 또한, 사고차량의자율주행제조사는임시번호판을모두반환하고평가를다시신청해야한다고규정하고있다. < 표 6> 베이징시자율주행시험요구사항 구분 시험차량요건 시험 요구사항 기존에등록되지않은자동차여야함 시험차량에는수동전환기능이있는자동조종장치가장착되어야함 자동주행모드에서는시험운전자가언제든지차량에직접개입하여작동할수있어야함 시험차량에는차량의운전자의운전행동을감시하고, 차량의위치를수집하고, 차량이자동주행상태에있는지여부를감시하는기능을가진감독장치가갖추어져있어야함 시험차량에는차량상태에대한알림장치가장착되어있어야함 시험차량은차량충돌또는통제불능을시험할때정지기간동안사고가발생하기최소 60 초전에관련데이터를기록할수있는데이터기록장치를갖추어야함 시험차량에는 3년이상의운전경험과음주운전경험이없는시험
55 운전자요건시험주체 ( 제조사 ) 요건 운전자가있어야함 시험운전자는언제든지시험차량의조작인계요청을인수할수있어야함 시험주체는보상능력을가져야하며차량당 500만위안 ( 약 8억 5천만원 ) 이상의교통사고보험을구매하거나 500만위안이상의도로시험재해보상보증을제공해야함 시험주체는관련요구사항에따라관리기관이승인한폐쇄시험장에서규정된주행거리와특정장면이상의시험을수행해야함 시험주체는매일감독을받아들이고자동운전기능및사고와같은관련데이터를관리기관에제공할것을약속해야함 시험주체는자율주행운전면허시험관리기관에다음의시험신청자료를제출해야함 ( 차후추가될수있음 ) (a) 시험대상자격인증자료 (b) 시험차량자격및자동운전능력인증자료 (c) 시험운전자격및시험능력인증자료 (d) 피험자의사고보상능력증명서 (e) 시험감독및관련조치등을따르는것에대한합의서 2) 베이징시자율차량시험도로도로요건규정해당규정에서는폐쇄형테스트를통과한차량의시내도로주행을규정하고있다. 여기에따르면, 베이징시자율주행시험도로는북경시도로구역내에있어야하며, 중국법률및규정을충족해야한다. 이규정에서는시험환경에대해도로밀도별, 날씨별, 시간대별로구분하고, 학교, 병원, 역세권, 소방도로는선택되어서는안되며, 동일한시험도로구간은서로연결되어있어야한다고 ( 즉, 고립된도로여서는안된다 ) 규정하고있다. 공도에서의시험도로분류규정에있어서도로등급에따라 R1~R5, RX로구분하여각도로의요건을규정하고자율주행시스템의성능에따라해당도로를운행할수있는권한을 T1~T5, TX 형태로부여하고있으며, 이때, RX 도로는 R1~R5 도로에통신장치가장착된도로로규정하고있다. 숫자가높을수록도로의조건이악화되므로자율주행의난이도가올라가며, 테스트면허 T1은 R1 도로에서주행가능하다. 상위도로는하위도로를포함하는구조이므로, 상위면허로하위도로를주행가능한시스템이다. 이규정에서는또한시험도로를주행하는시험차량은외부에서자율주행차량임을알수있도록별도의번호판요건을제시하고있다
56 < 표 7> 베이징시자율주행시험평가요소 평가내용 평가등급 구분 연번 세부항목 T1 T2 T3 T4 T5 1 시동 V V V V V 2 출발, 정차 V V V V V 3 경사로출발 - - V V V 4 교차로직진 - V V V V 차량 작동 5 교차로좌회전 - - V V V 6 교차로우회전 - - V V V 7 교차로 U턴 - - V V V 8 좁은도로 U턴 V V 9 곡선운전 - V V V V 10 직각회전 - V V V V 1 교통표지판인식 V V V V V 2 노면표지인식 V V V V V 3 신호등인식 V V V V V 4 기타교통신호인식 V V V V V 상황인식및교통법규준수 5 주변차량및보행자인식 V V V V V 6 안전거리유지 V V V V V 7 시야차단시상황인식 V V V V V 8 회전교차로통과 - - V V V 9 스쿨존통과 V V 10 터널통과 V V 11 횡단보도통과 - V V V V
57 1 차선변경 V V V V V 2 차선이탈방지 V V V V V 위치 제어 3 추월 V V V V V 4 T 자주차 V V 5 평행주차 V V 6 측면주차 V V V V V 1 비포장로주행 V 2 우천시주행 V V V V V 3 안개길주행 V V V V V 종합 주행 능력 4 젖은길통과 V V V V V 5 빙판길통과 V V V V V 6 야간주행 V V V V V 7 고속도로진입 V V V V V 8 램프진출 V V V V V 1 돌발상황시수동전환 V V V V V 돌발 상황 대처 2 수동전환후조작성 V V V V V 3 비상정지 V V V V V 4 돌발시나리오별긴급회피 V V V V V 네트워크 1 스마트도로통신
58 < 표 9> 베이징시자율주행시험요구사항 도로구분 R1 도로 R2 도로 R3 도로 R4 도로 R5 도로 RX 도로 직선, 양방향 4 차선및그이상 분류규정 저밀도교통흐름, 저 - 중 - 중밀도, 비분리, 열린시야 다양한단단한격리시설을포함할수있음 교차로포함 ( 코너링테스트에는허용되지않음 ), 신호가있는교차로, 신호가없는교차로, 횡단보도등 R1 도로포함 양방향 4 차선이상및편도 2 차선이상 저밀도교통흐름, 중간및낮은생활밀도, 비분리및열린시야 다양한부드럽고단단한격리시설, 직각굴곡부, 구부러진코너등을포함 할수있음 공공전기버스정류장을포함할수있음 R2 도로포함 양방향 2 차선이상 중간및저밀도교통흐름, 중간및낮은생활밀도, 넓은시야 물결모양의도로등을포함할수있음 버스차선, 비자동차차선및보행자차선을포함할수있음 지하도, 수목이우거진도로, 경사로등을포함할수있음 R3 도로포함 복잡한도로 ( 중간및높은생활밀도, 건물 / 식물에시야가차단될수있음 ) 철판, 시멘트, 자갈등이있는도로 터널, 급경사, 연속적인곡선, 복잡한교차로, 운하로쌓인복잡한교차로 등을포함 신호등이설치될수있는 5 방향이상의교차로 R4 도로 ( 교통경찰등 ) 사람의교통지휘, 안개길, 미끄러운도로및급상승하는 도로를포함 RX 도로는 R1~R5에네트워크로연결된통신장치가장착된도로 신호전환, 도로건설, 교통제어등과같은정보를자율주행에제공가능
 로주행하는자율주행자동차주행중신호의인지후진입여부결정 / 횡단보도를건너는인공보행자가있을시의정지, 고속도로구간내타차량과의군집주행,")
59 5. 미국 4) 1) M-City 미국미시간대학교소재 M City 는 32 에이커 ( 약 13만m2 ) 면적에조성된세계최초의도시형자율주행시험시설로자율주행자동차가실제도로를주행하기이전에최대한유사한환경에서시스템성능을평가하기위하여미시간대학교앤아버캠퍼스이동성변화센터 (MTC) 에서설립하였다. 약 8km 연장의차로를따라서기존도시와동일한형태로가건물 가로등 교차로 신호 표지 횡단보도 지하차도등을설치한도시부와자갈길 철도건널목 4차선도로등을설치한교외부로구성되었으며시속 40 마일 (64 km/h) 로주행하는자율주행자동차주행중신호의인지후진입여부결정 / 횡단보도를건너는인공보행자가있을시의정지, 고속도로구간내타차량과의군집주행, 굴곡이있는자갈길이나철도건널목에서의차선이탈없는안전한주행, 신호가없는교차로에서사람 차량이없어도무조건정차후출발하는 4 Way Stop 교차로와원형교차로에서의안전한진 출입등을종합적으로테스트할수있는환경을구축하였다. < 그림 25> 미국미시간대학교 M City 개념 출처 : 4) 이부분은 Road Vehicle Automation 5 (Springer, 2018) 의 Testing Connected and Automated Vehicles (CAVs): Accelerating Innovation, Integration, Deployment and Sharing Results 의내용재구성

60 < 그림 26> 미국미시간대학교 M City 전경 출처 : MTC(2015) 2) American Center for Mobility(ACM) 또한 M-City 는기타위치정보를송수신하는 GPS와통신이방해를받을수있는다양한환경 ( 가로수식재또는지하차도구간등 ) 에서의자율주행과 Connected Vehicle 기술및기타통신관련실험이가능하도록구성하였다. ACM은미시건대학, 미시건주정부, 완성차업체, 통신업체등이함께자율주행과커넥티드카분야의기술개발, 성능개선, 양산성검토, 표준화구축등을목적에두고설립한미국 DOT 공인산학협력기관으로, 윌로우런에 2019년최종완공을목표로자율주행차시험기지를건설중이다. 윌로우런은연면적약 200만m²( 약 61만평 ) 규모의차량, 도로, 인프라및통신시스템등의기술검증을위한시설로서, 다양한주행상황과기상상황 ( 태양, 비, 얼음및눈 ) 등의검증조건을제공함과동시에통제된환경에서의반복적인테스트가가능하며, 고속도로, 고가도로, 비포장도로, 도심및시골도로, 상가및주택지역, 터널등의실제도로환경과 2X, 4G와 5G, DSRC( 근거리전용무선통신 ), GPS와위치추적등의첨단IT 기술기반통신네트워크환경을구축중이다
61 3) Texas Automated Vehicle Proving Ground Partnership Texas Automated Vehicle Proving Ground Partnership 는美교통부의운행허가를얻기위해자발적으로모인텍사스주의자율주행제조사를중심으로구성되었으며, 여러도시를포괄하며로봇공학, UAV, GPS, 규정등에대한전문지식을보유한텍사스 A & M, UT Austin 및 Southwest Research Institute 에의해운영되고있다. 고속주행, 버스노선, 화물운송등다양한테스트환경을갖추고있다. 4) SunTrax and the Central Florida Automated Vehicle Partnership SunTrax and the Central Florida Automated Vehicle Partnership 에는통제된개방형시험장에서의트럭군집주행에대한시험을수행하며, 실험시설에는도시시뮬레이션구역, 고속트랙및자동요금징수시스템을테스트하는시스템이포함된다. 5) Iowa AV Proving Grounds, Iowa City, Iowa 아이오와에서는 800만달러규모의아이오와대학 (University of Iowa) 드라이빙시뮬레이터를이용하여가상의테스트환경에서운전자가완전자율주행차량에어떻게반응하는지연구중에있으며, 화물운송외에도안전성향상, 접근성, 노인및지원이필요한사람들을위한광범위한이동성에대한연구를함께수행중이다. 또한아이오와주행환경에대한고화질데이터베이스를구축하고배포하려하고있다. 6) GoMentum Station Contra Costa Transportation Authority, Concord 자율주행시험에사용할수있는 5,000 에이커의안전한구역을포함한여러시험시설이있다. 이지역은원래해군기지였으며, 도로, 터널 2개, 다리, 전기케이블이달린기둥등현실적인도로환경을갖추고있다. 주요자동차제조업체및자동화된자동차및트럭운전회사가포함한파트너들이참여하고있으며, 기존인프라를토대로도시환경의추가기능을구축할계획을준비중이다
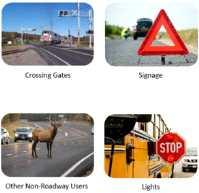
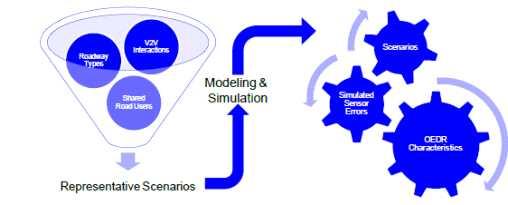
62 7) A Framework for Automated Driving System Testable Cases and Scenarios, NHTSA 운전의특정기능을자동으로수행하는자율주행시스템개발에국가적관심이집중된가운데, NHTSA(National Highway Traffic Safety Administration) 의연방자동차정책은자율주행제조사, 주정부및시교통관리기관, 정책그룹의의견을수렴하여, 2018년 9월자율주행차의개발과안전한도로운행및운영에중심을둔자율주행시스템에대한보고서를발간하였다. 이 NHTSA의보고서에는자율주행시스템 (Automated Driving System, ADS) 테스트를분석하고특정자율주행시스템기능에대한테스트및평가방법의사례를개발하여제공하고있다. 이프로젝트는자율주행기술의개념적기능분류를비롯하여, 운영설계도메인 (Operational Design Domain, ODD) 의식별및분류, 자율주행시스템기능에대한객체및이벤트탐지및반응 (object and event detection and response; OEDR) 의식별, 자율주행시험및평가방법개발, 작동불량및고장안전메카니즘평가와같은내용들을포함하고있다. (1) ODD의식별및분류 NHTSA 의보고서에서는자율주행시스템의 ODD 요소의분류프레임워크를제공하고있으며, 이러한분류에는몇가지원칙이적용되었음을밝히고있다. 첫번째로 ODD 분류체계에대한필요성에대해언급하고있다. 이러한체계는자율주행시스템에는다양한 ODD의차원이존재하며, 실제로테스트를가능하게하는시스템의요구사항, 기능에대한용이성을위해필요하다. 둘째로운영환경의다양성을고려하였다. 도로의교통환경은다양한형태로존재하며, 그중도로유형과같은일부환경은미리정해질수있으나, 날씨나정체와같은교통상황은시간에따라변할수있다. 이러한 ODD의일부는특정이벤트와같이이산적일수도있지만, 빛이나안개, 비처럼연속적인형태일수있으며, 계량하기어려운환경일수도있다. 보고서에서는이러한다양한 ODD 상황을조합하여 ODD 세트를구성하였으며, 이를운영시나리오로정의하였다
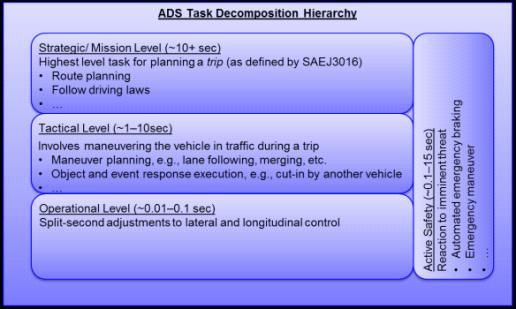
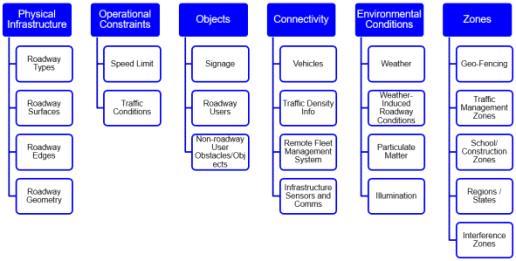
63 < 그림 27> 제어시스템의시간수준에따른자율주행시스템의작업요소 < 그림 28> ODD 요소분류프레임워크 (NHTSA)
64 < 표 10> 운영설계영역 (ODD) 분류 ( 구역 ) 구분분류내용 구역 Geo-Fencing 교통관리구역학교 / 공사구역지역 / 국가간섭구역 상업지구, 학교캠퍼스, 실버타운 임시차선폐쇄, 동적교통표지판, 가변속도 제한, 임시차선표지, 교통수신호 가변속도제한, 불안정한보행자및차량 도로교통법, 규제, 집행등기타고려사항 터널, 주차장, 고층건물로인한 GPS 간섭, 대기건
65 < 표 11> 운영설계영역 (ODD) 분류 ( 물리적인프라 ) 구분분류내용 물리적 인프라 도로유형도로표면도로가장자리도로구조 ( 중앙이 ) 분할된고속도로 ( 중앙이 ) 분할되지않은고속도로 간선도로 도시부 / 교외도로 주차장 다차선 / 단차선도로 다인승차량차선유무 on/off 램프유무 비상대피경로 일방통행여부 회전전용차선여부 자동차전용도로 가변차로 교차로 ( 신호, U턴, 4-way/2-way 정지, 회전교차로, 합류부, 회전차선, 횡단보도, 요금징수소, 철길건널목 ) 아스팔트 / 콘크리트 아스팔트, 콘크리트혼합 벽돌, 흙, 자갈, 잔디 파손도로 부분폐색 과속방지턱 움푹들어간도로 차선 / 임시차선 길어깨 ( 포장혹은자갈, 잔디 ) 콘크리트분리대 격자 철길 연석 임시분리대 직선 / 곡선 / 언덕 능선 코너 장애물 도로폭
66 < 표 12> 운영설계영역 (ODD) 분류 ( 운영적제약, 물체, 환경조건, 연결성 ) 구분분류내용 운영적제약물체환경조건연결성 속도제한소통상황도로표지도로이용자비도로이용자날씨날씨관련도로상태시계감소물질차량교통정보원격차량관리인프라센서및통신 최대및최저속도제한 최소교통량 평상시교통량 첨두교통량 돌발상황 ( 사고, 긴급차량, 공사, 도로폐쇄, 특별이벤트 ) 표지 교통신호 횡단보도 철길 버스정차 공사표지 우선신호 재난신호 수신호 차량유형 ( 승용차, 소형트럭, 대형트럭, 버스, 오토바이, 화물적재차량, 비상차량, 건설장비, 마차 ) 정치차량 이동차량 ( 사람운전자, 자율주행자동차 ) 보행자 자전거 동물 파편 ( 타이어조각, 쓰레기, 사다리 ) 건설장비 보행자 자전거 바람, 비, 눈, 진눈깨비, 온도 범람 결빙 도로상적설 안개, 연기, 스모그, 먼지 / 황사 V2V 통신, 긴급차량 클라우드소스자료및 V2I 센터기반원격차량조종 작업구역경고, 취약도로이용자, 라우팅및사고관리, GPS, 정밀지도, 도로파손위치, 날씨데이터, 구름데이터등



67 < 그림 29> 물리적인프라분류예시 (NHTSA) < 그림 30> 운영적제약및물체분류예시 (NHTSA) < 그림 31> 환경조건분류예시 (NHTSA)


68 < 그림 32> 연결성분류예시 (NHTSA) < 그림 33> 구역분류예시 (NHTSA)


69 < 그림 34> 레벨 3 조건부자율주행의교통정체상황에대해정의된 ODD 예시 (NHTSA) < 그림 35> ODD 환경정의예시 (NHTSA)

70 (2) OEDR 능력 NHTSA 의보고서는자율주행시스템이앞서규정된 ODD 내에서안전하게작동할수있도록 OEDR 기능을식별하는방법에대해설명하고있다. OEDR 은주행환경모니터링과이러한물체및사건에대한적절한대응을수행하는동적주행 (Dynamic Driving Task, DDT) 의하위작업을뜻한다. 즉, OEDR 은운전과관련해적절한반응을구현하는모든상황을자율주행시스템이감지할수있는지에대한능력을나타낸다. 때문에 OEDR 은자율주행시스템에대한샘플테스트를개발하는데중요한역할을한다. OEDR 과관련하여자율주행시스템의기능요소에는일반적으로다음을지원하는하드웨어및소프트웨어구성요소가포함된다. 감지 ( 예 : 레이더, 레이저스캐너, 카메라등 ) 지각 ( 예 : 도로지형분류, 객체세분화및분류등 ) 모델링 ( 예 : 데이터매핑, 동적장애물추적및예측등 ) 경로안내및계획 ( 예 : 반응을구현하는경로계획및동작제어 ) < 그림 36> OEDR 능력확인과정 (NHTSA)
71 이과정에서객체와이벤트의탐지는다양한방법으로발생할수있다. 자율주행시스템은이러한물체와사건중많은것들의탐지와인식을지원할수있는레이더, 라이터, 카메라및초음파센서의조합을잠재적으로포함할수있는인식센서조합을채택할가능성이높다. 이는해당센서에서제공하는데이터를분석하고해석하는알고리즘에좌우된다. 자율주행시스템이안전에중요한객체또는이벤트를올바르게감지했다면, 이제적절한반응을보일단계다. 이반응에서자율주행시스템은즉각적으로모든관련장애물로부터회피해야하며, 이러한반응중가능하면법규를준수해야한다. < 표 13> 레벨 3 조건부자율주행의교통정체상황의각종이벤트및관련반응예시 ( 도로이용자관련 ) 이벤트선두차량감속선두차량정지선두차량가속선두차량선회차선변경차량 Cutting-In 도로진입반대방향차량침입인접차량침입선두차량 Cutting-Out 보행자횡단 횡단보도내보행자횡단 횡단보도외자전거가도로에혼합주행중인상황자전거가전용도로에서주행중인상황자전거횡단 횡단보도내자전거횡단 횡단보도외 반응 계속주행, 감속, 정지 감속, 정지 가속, 계속주행 감속, 정지 양보, 감속, 계속주행 양보, 감속, 정지, 계속주행 계속주행, 감속, 정지 감속, 정지, 안쪽차선변경, 바깥쪽차선변경 양보, 감속, 정지 가속, 감속, 정지 양보, 감속, 정지 양보, 감속, 정지 양보, 따라가기 안쪽차선변경 양보, 감속, 정지 양보, 감속, 정지
72 < 표 14> 레벨 3 조건부자율주행의교통정체상황의각종이벤트및관련반응예시 ( 비도로이용자관련 ) 이벤트 반응 차선내멈춰있는물체 차선내움직이는물체 차선내로들어오거나나가고있는물체 감속, 정지 감속, 정지 감속, 정지 < 표 15> 레벨 3 조건부자율주행의교통정체상황의각종이벤트및관련반응예시 ( 기타상황 ) 이벤트 ODD 를벗어나고있는상황 반응 차량운전자에게제어권전환 (3) 자율주행시험및평가방법개발 NHTSA 보고서에서는자율주행차량의안전한주행을위해자율주행시스템평가를위한시험및평가방법개발에대해서도다루고있다. 평가방법및절차는공학적판단, 평가절차과정, 자율주행기능요구사항및사용사례를참조하여개발되었다. 이과정에서미래의자동차인증환경에대한가정은배제되었고, 오히려다양한상황에적용가능한평가프레임과일반적인테스트시나리오개발이이루어졌다. 이과정에서실질적이고구체적인테스트를결과가도출되지는않았지만, 향후물리적평가및가상평가에반영될수있을것으로기대된다. 한편 NHTSA 보고서에서는크게다음두가지방법으로테스트프레임워크를정의하였다. 블랙박스테스트 화이트박스테스트 블랙박스테스트는시스템의기능을테스트하는반면, 시스템의내부설계및구현은테스터에게거의알려지지않거나노출되지않은채, 자율주행시스템의최종적인반응만평가에반영된다. 화이트박스테스트는시스템의내부구조또는작동이노출되어기준과대조하며평가된다
73 경우에따라서는자율주행시스템의안전성검증에는블랙박스테스트만으로충분할수도있다. 그러나자율주행시스템의성능범위와같은이슈의검증에는화이트박스테스트가반드시필요하다는점을보고서는언급하고있다. 평가프레임워크의개발과평가절차를위한기본원칙은다음과같다. 테스트변수는시스템에통합되지않고격리되어있어야한다. 테스트환경은테스트의반복수행을위해특성화되거나제어되어야한다. 테스트측정기준에는고유한임계값이없어야한다. 시험방법은충분한동적범위를허용해야한다. 가능한가장낮은수준의통합으로테스트를수행해야한다. 낮은수준의테스트는높은수준의통합시스템테스트를위한경계조건을작성하는데도움을주어야한다. 테스트변수및조건의파라미터는합리적인최악의경우에초점을맞추어야한다. 이때자율주행평가는모델링및시뮬레이션, 폐쇄트랙평가, 공도도로평가의세가지아키텍처를가지고수행된다. 이세가지아키텍처는다양한수준의평가제어및평가환경에서다각적인평가환경을제공한다. 대부분의경우자율주행시스템과같은복잡한시스템을점진적으로평가하기위해두가지이상의기법을병렬적또는반복적으로사용하게된다
74 < 그림 37> 자율주행시스템시험및평가방법개발과정 (NHTSA) < 그림 38> 자율주행시험평가방법구조 (NHTSA)
75 모델링및시뮬레이션모델링및시뮬레이션은현실세계에서실제차량및실제인프라가필요없이자율주행시스템의행동에대한결과를생성하기위해가상평가자가있는가상환경을이용한다. 기본차량플랫폼과기본자율주행시스템구성요소는가상시스템의동작이실제시스템의동작을가능할수있을정도의물리적 / 수학적으로모델링되어야한다. 유사하게자율주행시스템이작동할가상환경또한이와유사한수준으로모델링된다. 이모델의충실도가높을수록차량또는환경의실제성격을더욱밀접하게반영할수있게되어평가의정확성이높아지게된다. 이러한시뮬레이션테스트는다음과같은몇가지이점을제공한다. 제어성 : 시뮬레이션은테스트의여러측면을손쉽게제어할수있는탁월한기능을제공한다. 예측성 : 시뮬레이션은지정한대로실행되도록설계되었으므로테스트실행방법에대한불확실성이거의없다. 반복성 : 시뮬레이션을사용하면동일한입력및초기조건으로동일한방식으로여러번테스트를실행할수있다. 확장성 : 시뮬레이션을사용하면많은수의시나리오를생성하고평가할수있다. 효율성 : 시뮬레이션에는시간구성요소가포함되어있어실시간보다빠르게처리할수있으며, 비교적짧은시간내에많은테스트를실행할수있다. 이러한기능은복잡한시스템을테스트하는데중요하며, 시뮬레이션은하나이상의완전기능테스트차량을구축하는것과는대조적으로초기테스트에서상대적으로저렴하게평가할수있다. 또한시뮬레이션환경은구현및배포가더빠르며보다광범위한조건을테스트할수있다
76 같다. 자율주행시스템평가에활용될수있는시뮬레이션의하위분야는다음과 SIL (Software-in-the-Loop) 시뮬레이션 HIL (Hardware-in-the-Loop) 시뮬레이션 VIL (Vehicle-in-the-Loop) 시뮬레이션 SIL 시뮬레이션은기본 ADS 소프트웨어의하위집합또는전체가자극에대한물리적응답을유도하기위해모델링된차량에통합되는전통적인시뮬레이션시스템이다. 여기에는모델링된센서데이터를처리하여현실모델링, 의사결정및모션계획알고리즘에적용할수있다. 모션계획알고리즘의출력은차량모델에입력되어가상차량의움직임을유도할수도있다. HIL 시뮬레이션은물리적하드웨어및장비의일정수준을시뮬레이션환경에통합하여시스템의일부부품에대한실제데이터입력및처리를제공한다. 가상자율주행시스템에의해생성된브레이크신호는특정조건및자극에대한실제제어반응을이해하기위한데이터를수집하기위해브레이크시스템으로전송될수있다. 마지막으로, VIL 시뮬레이션은생산차량및서브시스템을활용하여다소더통합된테스트및분석을할수있다. 자율주행시스템플랫폼은섀시동력계와같은롤러테스트벤치에설치하여차량이제위치에있는동안조향, 스로틀및브레이크시스템을물리적으로작동시켜바퀴를굴리고회전시킬수있다. 시뮬레이션시스템은롤러벤치와차량자체에묶일수도있다. 그러나시뮬레이션의사용에는몇가지단점이존재한다. 기본적으로시뮬레이션환경이실제세계를얼마나잘반영하는지를알기어렵다. 실제로가상의시스템및물리적특성을모델링하는것은무척어려운과정이다

77 < 그림 39> 자율주행시스템시뮬레이션아키텍쳐 (NHTSA) < 그림 40> 테스트요구사항및테스트시나리오의우선순위선정 (NHTSA) 폐쇄환경테스트실제환경에서테스트를실행하는것은자율주행시스템을평가하는중요한구성요소다. 시뮬레이션에서와같이잠재적으로제한된현실재현력으로모델링된차량에가상물체및환경을제공하는대신실제테스트는실제센서및대상플랫폼에서실행되는소프트웨어를사용하여실제수준의장애물이나장애물을생산수준차량에제공한다. 폐쇄형또는도로코스설정에서의테스트는실제와같은테스트조건을달성하는한가지방법이다. 폐쇄환경테스트는시뮬레이션또는공도테스트에비해몇가지이점을제공한다
78 제어성 : 트랙테스트를통해 ODD 및 OEDR의특정측면을포함하여많은테스트변수를제어할수있다. 현실도 : 기능, 물리적장애물과환경조건을현실적으로구현할수있다. 전환성 : 트랙테스트시나리오를다른위치에재현할수있다. 반복성 : 트랙테스트를통해같은입력및초기조건으로같은방식으로여러테스트반복을실행할수있다. 반대로폐쇄환경테스트는자율주행시스템을평가하고평가할때몇가 지단점이존재한다. 비용성 : 오래지속되고비용이많이드는경우트랙테스트는설정및실행에상당한시간이소요되어비용이상승한다. 제한성 : 다양한테스트변수를위해폐쇄환경및조건을수정하기어려울수있다. 요구조건 : 특수한테스트장비 ( 예 : 장애물, 측정장치, 안전운전자 ) 가필요할수있다. 위험성 : 실제차량과실제장애물트랙테스트는테스트참가자 ( 예를들면, 안전운전및실험관찰자 ) 에대한가능성이불확실하고위험한환경을제공한다

79 < 그림 41> 자율주행시스템폐쇄환경테스트아키텍쳐 (NHTSA) 공도환경테스트공공도로는자율주행시스템시험및평가를지원하는실제환경을제공한다. 개발타입시스템의전체성능평가를허용하는것외에도, 공공도로평가는자율주행시스템의 ODD 및 OEDR을매우다양한실제환경에노출시키며, 이는규정된폐쇄테스트트랙에서는실현될수없다. 그러나자율주행시스템의공공도로테스트에는몇가지단점이있다. 제어가능성부족 : 공공도로시나리오는 ODD 및 OEDR 조건을상당부분통제하지못한다. 복제가능성부족 : 공공도로시나리오는다른위치에서정확하게재현하기어렵다. 반복가능성부족 : 공공도로시나리오는여러번의반복작업을통해정확히반복하기가어렵다. 확장가능성부족 : 자율주행시스템은디지털지도와같은추가데이터가필요할수있으므로공공도로시나리오가제대로확장되지않을수있다
80 < 그림 42> 자율주행시스템공공도로환경테스트아키텍쳐 (NHTSA) < 그림 43> 자율주행시스템테스트시나리오예시 (NHTSA)
 로, 최고 204km /h까지주행가능한 ITS고속주회로, 차량-도로연계시험교차로, 등판로, 하이드로플래닝등의다양한시험로로구성되어있다.")
81 6. 국내 1) ITS 기반지능형자동차부품시험장 ( 자동차부품진흥원 ) 자동차부품진흥원에서는자율주행자동차부품의실증및실험의수행을위하여대구달성소재기존 ITS 기반지능형자동차부품시험장을활용하는방안을추진중이다. 대구 ITS기반지능형자동차부품주행시험장은총면적 394,565m2 ( 가로 1.8km, 세로 250m) 로, 최고 204km /h까지주행가능한 ITS고속주회로, 차량-도로연계시험교차로, 등판로, 하이드로플래닝등의다양한시험로로구성되어있다. 2017년 9월기준, 지능형자동차부품주행시험장의가동률은 62% 로 41개기업이이용하고있는것으로나타나, 2014년대비가동률은약 49% 이상, 기업수는약 70% 이상증가하였고, LG전자는대구시험장을기반으로 2018년부터 2022년까지자율주행차관련대형프로젝트를진행할예정이며, 이와더불어르노그룹차량시험센터가 2018년 3월개소를준비하고있다. < 그림 44> ITS 기반지능형자동차부품시험장 출처 : 대구광역시달성군 (2007)

82 2) 자율주행실험도시 (K-City, 교통안전공단 ) 교통안전공단에서는 2016~2019 년기간경기화성소재자동차안전연구원주행시험장내기존 ITS 시험로를확장하여안전한자율주행실험의진행을위한실험도시 (K City) 구축하여, 지난 12월완공하였다. K-City 는미국미시건대학교에위치한세계최초자율주행테스트베드 M City 를벤치마킹하였으며, 국내도로 교통환경을반영한특정조건에서의각종사고 위험상황반복 재현실험수행을통한자율주행자동차기술개발및평가에의활용을목표로하였다. 교통안전공단의자동차안전연구원이보유하고있던기존 ITS 시험로 ( 시가지및국도 ), 고속주회로 ( 고속도로 ), 조향성능로 ( 지방도로 ) 개량및확장을거쳐도심부, 커뮤니티부및자율주차시설, 자동차전용도로, 교외도로로구성하였으며, 자율주행레벨 3 상용화를대비하여자동차전용도로 (2017) 부터도심부등의기타도로 (2018) 순으로의단계적으로구축하였다. 통신인프라는 SKT와 5G인프라를구축하여 5G기반자율주행차량지원서비스를선보였으며, 국토부 R&D 과제참여를통해 WAVE-LTE 겸용하이브리드 V2X 통신시스템개발, 자율주차기술등에참여하였으며, 차량안전을중점으로테스트환경을구축하였다. 현재는이러한테스트베드를이용해주행시발생할수있는여러사고시나리오에대해수천건의사례를통해안전성평가를수행할수있는연구를추진중이다. < 그림 45> K City 구성 출처 : 국토교통부 (2016)
83 < 표 16> K City 시설별평가환경및항목 도심커뮤니티교외전용도로 평가환경 3/4지신호교차로 보행자횡단보도 빌딩면 버스 / 택시정류장 버스전용차로 비신호교차로 비신호횡단보도 벽돌블록보도 / 연석 자전거 / 보행자도로 School Zone 과속방지턱 / 주차장 자갈 / 비포장도로 경사 / 곡선도로 정지 / 회전교차로 가로수길 공사도로 지하도및터널 고속도로 합류 / 분기 가드레일 / 분리대 / 방음벽 톨게이트 평가항목 신호인지 / 예측 / 판단 / 제어 비자율주행자동차와의상호작용 도심건물로인한통신음영발생영향평가 버스전용차로인지및영향평가 버스 / 택시정차및출발시상충발생상황평가 보행자 / 자전거이용자 / 저속및소형이동보조수단등인지 / 이동, 예측 / 판단 / 제어 보행자충돌경보제공 직각 / 평행 / 사선주차기능평가및자율 Valet Parking 기능평가 교외지역도로환경인지 / 판단 도로기하구조인지 / 판단 / 제어 낙하물등장애물 / 공사로인지및거동 가로수로인한시인성저하, 통신음영발생영향평가 회전교차로인지 / 차량간우선순위결정, 상충상황평가 고속주행환경에서의인지 / 판단 / 제어 자동차전용도로차간거리및차선유지여부평가 톨게이트인지 / 통과가능여부, 차량간상충상황평가 소음방지벽 / 중앙분리대로인한통신음영발생상황평가 도로 시설 신호등 / 가로등 / 표지판 / 포트홀 V2X 통신 신호 / 표지판 / 조명인지 / 판단 / 제어 노이즈 ( 노면및선형불량 ) 의인지 / 예측 / 판단 / 제어 V2X 통신송 수신 출처 : 교통안전공단 (2016)
 < 표 18> K City 평가환경및구성요소 평가환경도시환경교통환경통신환경 구성요소 건물 / 어린이보호구역 보행자 자전거도로및버스전용차로등 신호등 / 표지판 / 터널 / 요금소 / 가로수등 도로변 WAVE, 5G, Wi-Fi 통신단말기 / 관제센터 / 검지기등출처 : 국토교통부 (2016)")
84 < 표 17> K City 도로구성 도로구성도심부커뮤니티부, 자율주차시설자동차전용도로교외도로 재연환경및시험기술 건물면 / 신호교차로 / 버스전용차로등도심부환경묘사 보행자 자전거이용자접근성중심커뮤니티환경묘사 전용주차장및갓길직각 평행 사선자율주차환경묘사 총연장 5 km/ 고속도로자율주행환경묘사 총연장 4 km 통신인프라가부족한국도및지방도환경묘사 능동조향장치고속수행시안전성시험수행출처 : 국토교통부 (2016) < 표 18> K City 평가환경및구성요소 평가환경도시환경교통환경통신환경 구성요소 건물 / 어린이보호구역 보행자 자전거도로및버스전용차로등 신호등 / 표지판 / 터널 / 요금소 / 가로수등 도로변 WAVE, 5G, Wi-Fi 통신단말기 / 관제센터 / 검지기등출처 : 국토교통부 (2016) 3) 기상환경재현도로성능평가시험시설 ( 한국건설기술연구원 ) < 그림 46> 경기연천기상환경재현도로성능평가시험시설 출처 : 국토교통연구인프라운영원 (2014)
 판교제로시티 ( 경기도 ) 경기성남소재판교창조경제벨리를시범운행구역으로설정하고 2018년까지총연장 4 km, 2 ~ 4차선규모자율주행노선을단계적으로구축하여자율주행자동차와일반비자율주행자동차공용을추진하였다. 판교제로시티는연구기관및기업과정밀도로지도, V2X 통신등의디지털인프라를구축하고, 중앙관제센터를통한주행자료실시간전송및교통상황관리를목표로하고있다.")
85 한국건설기술연구원에서는이와별도로경기연천소재기상환경재현도로성능평가시험시설구축을추진중이다. 이실험시설은기상조건 ( 눈 비 안개등 )/ 야간조명 / 도로소음등환경에대응하여교통안전을확보할수있는도로시설성능의실제규모실증실험을위한시설로악천후시자율주행자동차안전시스템의가동및주행안전성을평가할기상시험시설을갖출예정이다. 4) 판교제로시티 ( 경기도 ) 경기성남소재판교창조경제벨리를시범운행구역으로설정하고 2018년까지총연장 4 km, 2 ~ 4차선규모자율주행노선을단계적으로구축하여자율주행자동차와일반비자율주행자동차공용을추진하였다. 판교제로시티는연구기관및기업과정밀도로지도, V2X 통신등의디지털인프라를구축하고, 중앙관제센터를통한주행자료실시간전송및교통상황관리를목표로하고있다. < 그림 47> 판교자율주행자동차시범운행단지개념 출처 : 경기도 (2016)

86 5) 대구테크노폴리스 ( 대구시 ) 대구달성 / 수성일대에는기존자동차산업관련테크노폴리스와관련인프라 ( 지능형자동차부품시험장등 ) 연계하여시범운행단지를구축하고이를통하여 1회방문으로자동차시험운행 / 성능평가 / 부품인증을완료할수있는통합서비스실증환경구축을목표로하고있다. 이를위하여해당구간총연장 98.3km 구간에대한정밀도로지도를구축할예정이다. < 그림 48> 대구자율주행자동차시범운행단지계획 출처 : 국토교통부 (2016)
87 7. 시사점 자율주행자동차의상용화가본격화된이후인 2020년이후부터시범운영및구축에관한법 제도의수립이구체화될것으로전망된다. 현재 2020년이후자율주행을지원할 C-ITS의상용화가추진되고있는추세이며주요법규와인프라는 2025년이내구축이완비될것으로예상된다. 미국이가장빨리자율주행자동차시험운전및능력평가에앞장서는사례가많으며이는유럽의경우비엔나협약및제네바협약개정에따라상대적으로상용화시도가늦어지는상황에기인한다. 국내의경우미국, 독일등해외사례와비교할때차량의시범운영에관한법 제도및정책수립과정이다소지체되고있는실정이다. 미국, 유럽등의자율주행개발선진국들은대규모테스트베드인프라를비롯해실제도로에서의주행테스트를위한도로테스트인프라구축에정부차원의다양한정책을추진하고있다. 자율주행차안정성검증과평가필요성이점차중요해져, 다양한도로시설을보유한동시에눈, 비, 안개등의악조건주행환경설정이가능하고반복실험이허용되는평가환경, 즉자율주행테스트베드의필요성이점차증가하고있다. 특히, 자율주행자동차의운전능력평가및임시면허에관한법규들은많이제시되고있으나이를위하여필요한시험단지구축에관한제안은상대적으로적은실정이다. 국내에서는국토교통부주관으로 2016년이후특정제한지역을제외한대부분도로에서의자율주행자동차시험주행을지원하고있으며, 관련성능시험을수행하기위한시설을구축하고있다. 그러나기구축된자율주행실험단지는주로차량의기계적요소를평가하기위한단지로도로교통법관점에서의운전능력평가에는미흡한평가환경이므로이와관련한테스트베드의확충이필요하다. 이때문에완전자율주행자동차의운전능력을평가하기위한시험단지구축이요구되며, 자율주행자동차가실제도로를주행하기위해서는보다다양하고높은수준의안전성검증절차가필요하다. 현재국내에서구축중인자율주행시험단지는센서등인지기능과각종환경에서의원활한주행기능의시험에초점을맞추고있다
88 국외에서구축되고있는자율주행시험단지등유사사례를감안할때, 향후개발될자율주행 AI의판단및제어기능을시험함으로써종합적인운전능력을평가할수있는시험시설의구축이필요하며, 또한자율주행이용자의관점에서높은수준의자율주행시스템및기능에대한이해와돌발상황발생시대처능력이요구되므로이에대한교통이용자안전을고려한자율주행 AI운전능력평가적격성이평가되어야하며이를위한시설구축이필요하다
89 Ⅳ. 자율주행 AI 운전능력평가기법및모형개발방향설정 운전면허는최소수준의운전행동능력을평가하는방안으로서, 자율주행의경우운전자 환경 차량측면을고려한안전성평가기준을통하여도로내운전을허가해야한다. 이를위해법 제도 사회 문화등에따라다양한평가기준및요소가존재한다. 특히자율주행의면허발급에있어시스템상오류발생이없도록구현및검토가필요하며사람관점운전행동차원에서의차량의안전한도로주행이요구된다. 현재까지자율주행 AI 기반자율주행자동차의도입이본격화됨에따라대내 외적으로운전능력평가및면허에관한제도들이제안되었고자율주행의상용화가본격화된이후인 2010년이후부터시범운영및구축에관한법 제도의수립이본격화되고있다. < 그림 49> 운전면허시험절차 출처 : 도로교통공단 (2018)
90 국내의경우미국, 독일등해외사례와비교할때차량의시범운영에관한법 제도및정책수립과정이다소지체되고있는실정이다. 자율주행의운전능력평가및임시면허에관한법규들은많이제시되고있으나이를위하여필요한시험단지구축에관한제안은상대적으로적은상황이다. 2010년이후자율주행을지원할 C-ITS의상용화가추진되고있는추세이며, 주요법규와인프라는 2025년이내구축이완비될것으로예상된다. 미국이가장빨리자율주행자동차시험운전및운전능력평가에앞장서는사례가많고이는유럽의경우비엔나협약및제네바협약개정에따라상대적으로상용화시도가늦어지는상황에기인한다. 국내에서는국토교통부주관으로 2016년이후특정제한지역을제외한대부분도로에서의자율주행시험주행을지원하고있으며관련성능시험을수행하기위한시설을구축하고있다. 현재국내에서구축중인시험단지는지도학습 (Supervised Learning) 및규칙기반 (Rule based) 으로자율주행능력을평가하기때문에차량의일반화된능력평가가어렵다는단점이있으며하드웨어 (Hardware) 기반시설로구성되어물리적제약으로인한평가에대한다양성확보가어려운측면이있다. 자율주행기술의개발과정에서자율주행이인간이직접운전하는것보다더안전한지를확인하기위해다양한주행조건에서까다롭고반복적인안전평가가실시되어야한다. 실제도로상에서진행하는현실세계테스트뿐만아니라시뮬레이션으로주행거리를증가시켜보는것역시중요한부분이다. 특히시뮬레이션테스트는실제테스트보다유연하고융통성있게진행되기때문에위험도가높은경우등에예외의주행조건을테스트할때더욱효과적이다. 시뮬레이션과정없이현실상황에서자율주행차량의대응방식을결정하기에는한계가있고위험성이높은데주차된차량뒤에서어린이가도로로뛰어나오거나적색신호임에도불구하고신호위반이나신호예측으로과속운전하는차량에대한위험예측은어렵지만발생가능성있는위험한경우에는반드시사전에 1차적으로시뮬레이션테스를실시할필요가있다. 현재평가기술로시뮬레이션을통하여첨단그래픽기법으로기존의시나리오를복제하고수정하는것도가능하다

91 또한시뮬레이션을통하여다양한기후상황을만들거나낮과밤의시간상황을인위적으로연출도가능하다. 심지어고속도로에서빙판길혹은블랙아이스와같은도로구간을만드는시뮬레이션을통하여다양한상황을연출할수있으며시험주행중인운전자의위험상황을가정하는것이가능하다. 실제와같은차량과보행자의움직임이적용된시뮬레이션도시를만들어시뮬레이션환경에서센서입력값을재현하고딥러닝에적용하여시뮬레이션된센서가실제환경처럼정확하게행동하도록구현이가능하다. 이처럼실제환경이라면위험하거나비현실적일수있는시나리오테스트도가능함을의미한다. 운전자를통하여실제도로에서새로운자율주행기술의성능을평가하는과정이반드시필요하고시뮬레이션을통하여실제환경에서의주행시간을보완할수있어교통안전환경을조성할수있다. 따라서다양한환경에서일반화된능력평가가가능한면허시험기반시설이필요하고비용 효율적인측면에서기존하드웨어중심의평가체계가아닌소프트웨어중심의평가체계구축이 1차적으로필요하다. < 그림 50> 기존시험단지의한계및시사점도출 출처 : 도로교통공단, 정책과제, 자율주행 AI 운전능력평가시험단지기획연구 (2018) 결과활용
92 소프트웨어형태의자율주행인공지능기술평가를위해 SILS(Software -in-the-loop Simulation) 기반평가시설구축이필요하다. 자율주행 AI운전능력평가를위한주요구성요소에는가상환경, 실험주체인자율주행 AI시스템반응이있으며반응의적절성여부를통해자율주행 AI의운전능력을평가후지속적인피드백을통한반복교육을수행할필요가있다. 또한피드백을통한반복교육과정에서윤리, 기술등여러측면의인공지능학습여부및습득능력에관한평가가요구된다. 다음의평가절차를통해시뮬레이터기반연구를활용한시험단지구축의타당성도출이가능하다. 전세계적인동향조사를통한교통선진국의사례와비교할때국내시험단지구축이다소지체된경향이있다. 현재개발되는자율주행기술의발전수준에비해차량측면의자율주행기술, 운전면허, 인증및제도등에관한평가가부족한실정이다. 따라서성능시험장 (Proving Ground, PG) 기반실외평가시설과 HILS 및 SILS 기반실외평가시설로나누어차량의운전능력평가가필요하다. 이를통해각종센서및도로환경주행에관한종합적인운전능력평가가가능하다. 한편센서등다양한형태의소프트웨어기술이자율주행의주행을위해차량내부에탑재되어있다. 실험주체인자율주행 AI에관한소프트웨어 (Software) 가실제차량에탑재했을때호환가능한지 (Compatible) 여부를확인해야한다. 자율주행에탑재된소프트웨어에기반하여주행중기본동작에관한성능에관한검증이필요하다. 이를평가하기위해자율주행이실질적으로주행가능한전용주행로의구축이필요하다. 최종적으로아래그림과같이해당자율주행 AI운전능력평가인증부여시자율주행운전능력평가강제, 선택, 병합결과를통한운전면허는운전능력판단결과이다. 다시말해운행가능한도로를강제하는것이며혹은자율주행차량의안전운전능력을판단함으로써이용자 (User) 의선택을유도하는것이다. 더불어병합은운전능력을부여하되도로의기능및규모에따라구분된도로를주행할수있도록강제하는방법을말한다

93 < 그림 51> 기존운전면허시험대비자율주행 AI 운전능력평가시험기본설계방향

94 Ⅴ. 자율주행 AI 운전능력평가모형개발기본설계제시 1. 목적 자율주행시대가도래할경우차량의제어권은운전자에서차량으로일부혹은전부옮겨가게될것이다. 자율주행은다양한주행환경을분석하고판단하게될것이며, 이를위해서는자율주행에 AI 기능이탑재될가능성이높아지게된다. 자율주행은사람과동등한능력이상의운전행동능력을보유하여야일반사람들이자율주행을운행하게될것이며, 현재사람에게부여되는면허와동일하거나유사한형태의면허가자율주행차량에부여되어야만할것이다. 이를뒷받침하기위해서는자율주행의주행안전성을객관화하고평가할수있는시스템이선행되어야하고다양한환경시나리오를마련함으로써실도로에서의주행환경에대한충분한대응력을갖추도록해야할것이다. 기존운전면허시험을바탕으로운전면허실증테스트를수행하기에앞서자율주행테스트에수반되는비용과시간을줄이고위험을해소하기위해서가상시뮬레이션환경이필요하고운전능력평가시스템또한가상시뮬레이션환경을 1차적으로하고실증평가를최종의목표로한다. 이에자율주행의면허체계를객관화하고자율주행운전능력을등급화하여교통안전을확보하는것이기본평가시스템의궁극적인목표이다. < 그림 52> 가상환경기반자율주행 AI 운전능력평가시스템
95 2. 자율주행 AI 운전능력평가기본설계 자율주행운전능력평가시스템은가상의시뮬레이션환경과실도로환경모두를고려할수있다. 시뮬레이션환경은운전능력평가시비용과시간을절약할수있으며, 실제발생할수있는사고등의위험상황또한제거할수있는장점이있다. 주행테스트시나리오에대한분석기법및알고리즘을적용하여객관화된지표를정립한다. 이에따라테스트를시행하고분석함으로써자율주행차량이실제로운행되었을때의안전한지의여부를판단할수있을것이다. 또한사고상황등에대한다양한주행환경시나리오를구축하고테스트하는것이가능하여실제로자율주행차량이사람이운전하는차량보다안전함을입증하는도구로도사용가능할것이다. 주행환경시나리오와테스트에대한정보를데이터베이스화하여운영하면보다더객관화된지표를마련할수있을것이다. 1) 운전능력평가시스템의타당성현재자율주행차량의운전능력을평가하기위한시스템및관련된제도가전무한상태이며자율주행차량의임시면허또한자동차자체에대해서만초점이맞춰져있는상황이다. 현행의자율주행차량에대한임시운행은자율주행차량개발및테스트를위한제도이며, 극히제한적인상황과조건만을대상으로테스트가이루어지기때문에다양한주행환경과상황이반복되는실도로환경에서는추가적인평가를필요로한다. 참고로 ODD(Operation Design Domain) 기반으로자율주행차량을설계할경우다양한주행환경에대한모든상황을설계할수없을가능성이높다. 이를해결하기위해서자율주행차량에사람을대신할수있는 AI가탑재될가능성이높아질것이고자동차자체가아닌사람을대신할 AI에대한면허제도도입이필요하다고판단된다. 따라서자율주행에수많은모듈이집약된자율주행에대해서작은부분부터전체적인테스트가가능한종합적인자율주행 AI운전능력에평가대한검증이가능한필요하다고판단된다

96 2) 평가방법 (1) 가상 AI 시스템평가자율주행차량의전체에대한운전능력평가의경우막대한비용과시간이요구되기때문에사람운전자를대신하게될 AI에대한운전능력평가를선행하는것이타당할것이다. 따라서자율주행 AI는소프트웨어의형태이기때문에 SILS(Software In the Loop Simulation) 테스트가적합할것이다. SILS 운전능력평가를통해 AI의운전능력을평가하고 AI가자율주행시적절한안전운전을수행하였는지를판단할수있다. < 그림 53> 자율주행 AI 운전능력평가시스템개요 자율주행 AI는각각의센서로부터데이터값을입력받고이를바탕으로현재주행환경을분석한후적절한주행상태를결정해야한다. 안전한운전을위한표준화된값의데이터셋을결정하고자율주행 AI가이범위안에서적절한주행결정을하였는지판단하고이를등급화 ( 점수화 ) 한다. SILS 기반 AI 평가시스템은전체시스템평가이전에수행되는소프트웨어평가시스템이며보다정확하고종합적인테스트는운전능력평가시스템에서담당한다. SILS(Software In the Loop Simulation) : 시뮬레이션을이용한소프트웨어의평가 방법으로모사된입력조건에대해시스템이설계한목적에달성하는지여부를판단하는 것이다. 소프트웨어시스템을안전하고효율적으로검증하기적합한평가방법이다
97 (2) 통합시스템평가다양한환경에서자율주행차량의주행능력을판단하기위해서는종합적인통합테스트를필요로한다. 통합시스템평가는실도로에서진행해야정확하지만테스트에필요한시간과비용그리고사고의위험으로인하여많은제약사항이발생하게된다. 특히현재운전면허시험필기시험과같은경우대체할방안을검토한다면가상시뮬레이션기법을활용한 AI 운전능력평가시스템의도입이필요하다. 이외에도 HILS(Hardware In the Loop Simulation), VR(Virtual Reality) 등을활용하여 AI 운전능력을복합적으로평가하는방안으로활용할수있다. 3) 시뮬레이션 (1) 시뮬레이션의필요성시스템개발분야에있어서시뮬레이션이개발속도및안전성을향상시키는데있어서필수적인도구라는사실은오랜시간에걸쳐증명되었으며, 자동차산업에서도오랜기간동안시뮬레이션을사용해왔다. 시뮬레이션은컴퓨터상에서가상의프로토타입을만들고이를테스트함으로써물리적으로비용 효율적측면을고려하여수행할수있어서개발속도를높일수있다. (2) 시뮬레이션의장점 개발시간단축 : 가상의환경에서시뮬레이션을수행함으로써실제테스트과정보다빠르고정확하게진행할수있어개발기간을단축시킬수있다. 비용절감 : 시뮬레이션을진행하기위해필요한비용은실제시제품을제작하고테스트하는비용보다훨씬적게소요되기때문에개발비용절감을할수있다. 품질향상 : 시뮬레이션은가상의환경에서반복되고다양한환경을모사하여예상되는문제를사전에방지할수있어서시스템품질향상에기여한다

98 3. 자율주행 AI 운전능력평가시스템구성 1) 구성도 < 그림 54> 자율주행 AI 운전능력평가시스템구성도 전체시스템구성도는위의그림과같다. 본시스템은가상시뮬레이션환경을고려하여설계되었다. 자율주행차량을가상의시뮬레이션평가할수있는시뮬레이터구성이필요하며, 테스트를필요로하는자율주행차량은운전능력평가시스템에서생성된표준데이터를인지하고이에대해적절한반응을할수있도록하는테스트환경을필요로한다. 운전능력평가시스템또한다양한환경의모사를위해서 AI기능을탑재할필요성도있다. 이벤트발생기를통해생성된표준데이터는유선또는무선의통신채널을이용하여시험차량에송신되며, 통신환경에적합한상세프로토콜의정의를필요로한다. 테스트를필요로하는자율주행차량은표준데이터를이해할수있는기능을필수로갖추어야한다
 장치설명 (1) 자율주행차량 (AI module) < 그림 55> 자율주행스마트센서 출처 : Texas Instrument 센서외부환경을인지하기위한장치로각종센서로구성되며외부의교통환경을전기적신호로변환하여 ECU(Electronic Control Unit) 으로전달한다.")
99 자율주행차량은스스로판단해서주행하기도하지만주변인프라와다른자율주행차량간에통신데이터교환을통하여교통정보를송수신하고이를주행에활용해야하므로통신성능에대한평가도필요로한다. 주행에필요한정보를통신을통해송신또는수신시통신속도 (data rate), 통신지연시간 (delay, jitter) 등을측정하여허용범위내에속하는지에대한통합테스트를필요로한다. 2) 장치설명 (1) 자율주행차량 (AI module) < 그림 55> 자율주행스마트센서 출처 : Texas Instrument 센서외부환경을인지하기위한장치로각종센서로구성되며외부의교통환경을전기적신호로변환하여 ECU(Electronic Control Unit) 으로전달한다. 센서의종류로는카메라 ( 모노, or 스테레오 ), 레이더, 라이더, 초음파, GPS 수신기등이있으며인식률과성능을높이기위하여다채널센서를사용할수있다
 라이다 (LIDAR) 카메라 (Camera) GPS 기능레이더 (RAdio Detection And Ranging) 는물체의거리나속도,")

100 < 표 20> 자율주행일반센서 레이더 (Radar) 카메라 (Camera) 라이다 (Lidar) 울트라소닉 (Ultrasonic) 출처 : ADAS( 지능형운전자보조시스템 ) 의핵심부품 ( 센서 ) 개발전략 / 한국자동차산업연구소 < 표 21> 자율주행주요센서 명칭레이더 (RADAR) 라이다 (LIDAR) 카메라 (Camera) GPS 기능레이더 (RAdio Detection And Ranging) 는물체의거리나속도, 각도를측정하기위해전자기파를사용하는감지센서로주로먼거리의물체를인식하는용도로사용된다. 라이다 (LiDAR, Light Detection And Ranging) 는전자기파를사용하는레이더와는달리빛을이용하여근거리를스캔하는용도로사용된다. 3차원이미지를만들수있는장점이있다. 사람의눈과비슷한원리로광학계를통해데이터를영상으로감지하는센서이다. 사람의눈과같이어둡거나물체에가려지면정확한감지가어려운단점이있다. GPS 위성과 GPS 수신기와의거리를통해위치를측정하는방법으로구조물과이동중인물체에대한위치를계산할수있다
101 통신모듈 V2X((V2I, V2V) 통신을위한장치이다. WAVE, 5G 등통신데이터를송수 신하기위함이며, 인프라와다른차량간의통신정보교환을한다. 인지다양한센서에서입력된데이터신호의값을처리하여주행환경및장애물등주변의모든물체의존재를인식한다. 인식된값을바탕으로장애물의종류와거리, 속도, 방향등을파악한다. 판단주행경로상에장애물이인지되면현재유지하고있는주행상태를유지 / 변경할지를결정하고안전한주행을위하여브레이크, 조향장치등을적절하게변경하기위한데이터값을결정한다. 제어 정해진데이터값을바탕으로액추에이터를동작시켜실제자율주행차량이 주행을변경한다. < 표 22> 자율주행구성요소 구성요소인식판단제어 설명 레이더, 라이더, 카메라등의센서데이터 도로, 신호기, 구조물등의정적데이터 목적지까지의경로계획 장애물회피경로계획 상황별주행판단 ( 차선변경 / 유지, 좌우회전, 추월, 비상정지등 ) 주어진경로를주행하기위한조향, 가감속등엑츄에이터제어
102 (2) 운전능력평가시스템 3D 믹서영상이미지를자율주행차량에노출시키기위한장치이다. 주행영상이미지와이벤트발생기로부터생성된사물의영상을합성하여차량에제공한다. 다양한주행환경시나리오와주행시발생할수있는이벤트상황을조합하여하나의영상으로만든다. 자율주행차량은합성된이미지를활용하여안전운전에적절한제어를할수있도록해야한다. 이벤트발생기자율주행차량을테스트하기위한다양한주행이벤트를생성하여차량에제공하며, 실제주행환경에서나타날수있는장애물, 물체등을생성한다. 예로는신호기, 보행자, 각종장애물, 다른차량등이있으며통계데이터를활용하여장애물의크기, 속도, 이동방향등의표준화할필요가있다. 영상변환기자율주행차량에영상을변환한표준화된데이터를전송하기위한장치이다. 주행영상과이벤트발생기에서생성된영상데이터를자율주행차량이인지할수있도록표준화된데이터로변환하며, 자율주행차량에유선또는무선의채널을사용하여송신한다. 각영상시나리오및장애물에대한데이터의표준정립이필요하며, 통신에사용할프로토콜에대한정의또한함께수반되어야한다. 통신변환 / 분석기 V2X 통신성능을테스트하기위한장치로이벤트발생기에서생성된통신데이터를무선채널을이용하여자율주행차량에제공하며, WAVE, 5G 등의프로토콜을지원해야한다. 통신성능은전송속도 (data rate) 와지연시간 (delay) 등을측정하여판단하며허용범위에속하는지여부를판단한다. 자율주행차량에주행정보를제공하기위한주행정보메시지와통신연결및왕복시간, 지연시간등을측정하기위한테스트메시지로구성할수있다
 동작절차 < 그림 56> 자율주행 AI 운전능력평가시스템흐름도 1) 3D 믹서는영상변환기를통해테스트차량에주행영상과이벤트영상을제공한다. 2) 자율주행차량은주행영상에따라정상적인자율주행을진행한다.")
103 분석기각종테스트주행시나리오에대한자율주행차량의대응을분석하고판단하는장치이다. 자율주행차량이이벤트발생기에서생성된장애물을적절하게회피하였는지등의안전운전여부를객관화된지표로평가하고등급화 ( 점수화 ) 하는역할을한다. 다양한시나리오별객관화된지표의수립이필요하며향후자율주행 AI운전능력평가를통한운전면허에도활용할수있을것이다. 3) 동작절차 < 그림 56> 자율주행 AI 운전능력평가시스템흐름도 1) 3D 믹서는영상변환기를통해테스트차량에주행영상과이벤트영상을제공한다. 2) 자율주행차량은주행영상에따라정상적인자율주행을진행한다. 3-1) 이벤트발생기를통해자율주행차량의안전운전을방해하는장애물을생성하여주입한다
104 3-2) 통신성능테스트를수행한다.(WAVE, 5G 등 ) - 자율주행차량에테스트메시지를송신하여통신연결 (link), 왕복시간측정하고, 연속적인테스트메시지송수신하여메시지간통신지연시간 (jitter) 등을확인한다. - 자율주행차량은이벤트발생기를통해생성된주변정보를수신하고분석한다. 4) 자율주행차량은안전운전에방해되는물체 ( 물체의종류, 위치, 속도, 이동방향 ) 을인지하고물체의이동방향을예측하여안전운행이가능한주행상태혹은정지상태를결정한다. 5) 자율주행차량은주행의변경이필요한경우결정된제어값에따라핸들, 브레이크등을적절히조절하여안전운행상태를유지한다. 6) 분석기는주행변경값을수집하여기존에설정된안전운전지표값과비교 / 분석하여자율주행안전운전여부를결정한다. 7) 다양한자율주행시나리오에대하여 3)~6) 단계를반복하여테스트데이터를산출한다. 8) 반복된데이터값을바탕으로안전운전등급을결정한다. 이벤트발생기에서생성되는데이터는영상데이터와통신데이터로구분되며단일혹은복합적으로구성될수있다. 자율주행차량은가능한다양한주행환경의테스트를수행할필요가있으며, 이를통해보다안정적인주행이가능한시스템임을증명할수있다. 4) 고장분석자율주행차량에고장이발생한경우도고려하여평가시스템을구축할필요가있다. 다양한원인으로인하여차량에고장이발생하면오동작을하게되고이로인하여안전한자율주행을저해하는요소로작용할수있다. 차량의고장은자가진단을통해서발견할수있도록설계가필요하고시스템의이중화, 삼중화등을통해안전성과가용성을높일수있어야한다
105 주기적인자가진단으로고장이발견될경우미리정의된안전모드로진입하고고장의중요도와위험요소에따라지정된모드또는선택가능한운전모드로전환되어야만한다. 따라서시스템고장으로인하여운전모드의변경이필요한경우정상적으로운전모드가변경되는지여부도운전능력평가시스템에서다양하게점검해볼필요가있다. 사람운전자를대신하는시스템에대한시스템 FMEA(Failure Mode and Effect Analysis) 정의가필요하고평가절차및방법에대한검증이선행되어야만한다. 이에따라특정부분에고장이발생한경우에대한시뮬레이션도필요하다. 전자장치는다양한원인으로인하여고장이발생할수있으며이로인하여전체시스템이오동작하거나동작이불능한상황이발생할수도있다. 따라서특정부분에고장이발생한경우를가정하여위의절차를반복하여정상주행이가능한지혹은안전한상태 (fail safe) 로동작할수있는지도분석해보아야한다. 상기동작절차중고장모드분석을위하여특정부분의데이터를왜곡또는배제하여분석을진행한다. 특정고장모드에서의표준화된안전운전데이터를설정하고이와비교 / 분석하여평가해야한다. (1) 센서고장카메라등의센서에서고장이발생한경우를가정하여테스트를수행한다. 센서에서 ECU로데이터값이전달되지않거나잘못된값이입력되는경우해당센서의데이터값을배제하고가능한동작모드중한가지를선택한다. 고장이발생한부분을제외한다른센서의데이터와통신데이터를활용하여운전자및보행자의안전을확보하도록해야한다. 선택가능한동작모드 수동운전모드 비상정차모드 저속비상주행모드
106 (2) 통신모듈고장통신모듈의고장의경우는주위의정보데이터를얻지못할뿐자율주행차량스스로주행이가능한경우도존재한다. 따라서이럴경우에는자율주행차량스스로판단을하여자율주행여부를결정하고이를사용자 ( 운전자 or 관제센터 ) 에게알려주어야한다. 고장이발생한부분에대한정보도사용자에게알려주어야한다. 선택가능한동작모드 자율주행모드 수동운전모드 비상정차모드 저속비상주행모드 4. 시사점 자율주행시대는기존의운전제어권이사람중심에서차량중심으로이관될것으로예측된다. 따라서현행사람중심의운전면허제도또한변화가불가피할것이다. 자율주행시대에는차량의기능안전성뿐만아니라운전주체에대한평가도동시에수반되어야할것이다. 다양한주행환경에서정상적인운행을위해서는사람과유사한지능을보유한 AI가자율주행차량에탑재될것이며, 이에대한객관적인평가도필요할것이다. 다양하고복합적인주행환경을반영할수있는시스템도입과함께 AI에대한객관적인평가가가능하도록기준과지표를마련해야한다. 이와함께보다복합적인주행환경구성을위해서 360 테스트가가능한시뮬레이션환경을구축하여실제주행과유사한환경구축이필요할것이다. 현재와마찬가지로자율주행시대에도궁극적인목표는사람의안전이며자율주행차량을보다효율적으로이용하기위해서는자율주행차량에대한면허정책과제도의마련이반드시필요하다
107 Ⅵ. 결론및향후연구과제 1. 결론 자율주행기술이날로발전하는가운데자율주행차량의안정성을검증하는방법은여전히미흡하다. 기존시험방식으로는자율주행차량을시험하는데한계가있다. 특히자율주행운전행동제어권이사람중심에서차량중심으로전환될것으로예상됨으로써현행사람중심의운전면허제도또한변화가불가피할것으로판단된다. 따라서자율주행시대에는차량의기능안전성뿐만아니라운전주체에대한평가도동시에수반되어야할것이다. 첫째, 다양한주행환경에서정상적인운행을위해서는사람과유사한지능을보유한운전주체인자율주행 AI스템이자율주행차량에탑재될것이며, 이에대한객관적인운전능력평가도필요할것이다. 다양하고복합적인주행환경을반영할수있는평가시스템도입과함께자율주행 AI에대한객관적인평가가가능하도록기준과지표를마련해야한다. 둘째, 이와함께보다복합적인주행환경구성을위해서실질적인교통안전차원에서의실환경테스트가가능한시뮬레이션환경을구축하여실제주행과유사한환경구축이중요할것이다. 현재와마찬가지로자율주행시대에도궁극적인목표는사람의안전이며모두가이해하고공감할수있는자율주행의사회적수용이다. 자율주행을보다안전하고효율적으로이용하기위해서는자율주행에대한운전면허정책과제도의마련이반드시필요하다. 셋째, 자율주행자동차임시운행을위한시험운행과자율주행자동차운전능력평가는분명한차이점존재한다. 자율주행자동차임시운행을위한시험운행의경우에는주로자율주행자동차의연구개발을위해수행되는것으로서시험운행에사용되는차량및센서기술과운전능력이완전하지못한것이일반적이다. 자율주행자동차운전능력평가의경우에는차량및센서기술과운전능력이어느정도완성된차량에대하여상용화를위한최종점검이라할수있다. 따라서자율주행자동차운전능력평가는자율주행자동차의운전능력에대한보다엄정하고종합적인평가가수행되어야할필요가있다
108 넷째, 자율주행자동차의운전능력평가를위해서는 자율주행자동차의안전운행요건및시험운행등에관한규정 에서시험운행을위해 도로교통법 에의거하여자율주행자동차의운전능력평가를위한제도및절차가제정될필요가있다. 이를위해서는차량제작및시험운행에초점이맞추어져있는임시운행허가제도보다는 도로교통법 준수여부, 기계윤리에대한부분해결하고종합적인운전능력에대한보다심도있는평가가필요하다. 다섯, 자율주행임시운행을위한시험운행과자율주행자동차운전능력평가는상호보완적인관계로설정될필요가있다. 자율주행자동차의연구개발을위해서는임시운행이필요하며, 임시운행을통해서차량, 센서그리고운전능력에대한기술개발이이루어지고있다. 이러한기술적발전을토대로자율주행자동차의상용화에앞서자율주행자동차의운전능력에대한종합적인평가가필요하다. 마지막으로유럽의경우자율주행의상용화를위해완성차업체및부품업체에서기술개발을담당하고있으며국가차원에서데모, 표준화및법규, 상용화를담당하는이분화된구조를지니고있다. 해외교통선진국의사례를참고하여국내의경우도완성기술의표준화및법규제정과상용화를위해정부차원의정책지원이필요하다. 이를위해서는국가별교통법규, 정책, 도로환경등이다르기때문에각나라의교통문화에적합한제도및평가를위한환경이구축되어야한다. 한편레벨4 이상의차량보급이시작되는본격적인자율주행의경우 2030 년이후에가능할것으로전망되기때문에단계적인절차수립을통해장기적인관점에서보다체계적인대응이요구되고있다. 또한현재인지 판단등사용자와의인터페이스적인측면에서인공지능기술수준이미흡한실정이다. 완전자율주행을위해서는다양한인공지능기술이융복합적으로구현되어야하나현재는레벨 2 수준자율주행의상용화가진행되고있는단계이며레벨 3 수준의부분자율주행기술이일부상용화되고있는단계이다. 추후예상되는인공지능기술의발전에따라국민의편의성향상및시장의경쟁력확보를위해개발중인기술수준에대한면밀한정의와상용화에관한적합성분석이필요하다
109 상위레벨 (Highly Automated Vehicle) 자율주행의상용화에따라운전자, 보 행자등다양한관점에서안전성을확보하기위해완성품평가에관한연구 가반드시수행되어야한다. 2. 향후연구과제 가상환경시뮬레이터를통한자율주행 AI 운전능력평가모형시스템관련 연구개발시 ( 특허출원및등록추진 ) 해당기본내용을정리하면다음과같다. 자율주행을위하여설치된다양한검지체계를통하여수집되는가상의데이터또는신호정보를생성한다. 사람이운전중에필요한능력은 3가지인데인지판단제어순이다. 이중가장먼저필요한능력이바로인지능력이다. 해당인지능력을대체하는것이자율주행의센서이다. - LiDAR, Vision, Laser, RADAR 등각종인지체계의가상데이터 Input 역활가상으로생성된인지데이터는실도로교통환경을현실적으로반영하여정보를생성하는가상인지환경생성모듈에의하여생성한다. 가상의인지환경으로부터생성된데이터또는신호는자율주행을위한인공지능 (Artificial Intelligence, AI) 의입력자료로변환되어입력된다. - 자율주행차량에탑재된자율주행 AI가인지할수있는표준화된정보 Set으로변환할수있도록 Interface 를구축하고이를통하여데이터변환 ( 자율주행 AI를검증을위하여 Interface의전후입출력자료의표준화필요 ) 가상인지환경데이터입력후자율주행 AI는입력자료를기반으로가상환경에적합한주행의사결정을수행하며, 차량을제어하기위한제어명령을생성 ( 차량제어명령은차량의 ECU(Electronic Control Unit) 로입력되는정보 ) 해당제어명령에의한결과인차량거동의적합성여부를판단하여자율주행 AI의판단능력적절성여부를검증한다
110 [ 참고문헌 ] 1) 과학기술정보통신부 (2018), 과학기술 &ICT 정책및기술동향 2) 고한검, 김지호, 성명제, 이진수 (2012). 도로주행시뮬레이션평가를통한스마트델리네이터의안전운전유도효과분석, 대한교통학회지, 제30권제4호, 대한교통학회, pp ) 강산들 (2014), ADAS( 지능형운전자보조시스템 ) 의핵심부품 ( 센서 ) 개발전략, 강산들, 한국자동차산업연구소 4) 교통안전공단 (2016), 자율주행자동차안전성평가기술개발및실도로평가환경구축상세기획 2단계보고서, 국토교통부, 국토교통과학기술진흥원 5) 국토교통부보도자료 ( ), 산업육성 -4차산업혁명대비등올해국토교통 R&D 4,738억원투자, p.2 6) 국토교통부보도자료 ( ), 국토교통 4차산업혁명대응전략, p.3 7) 국토지리정보원 (2017), 정밀도로지도제공안내 8) 국민대학교 (2018), 도로인프라별교통상황에따른제어권전환안전성평가방법론개발및평가지표개발 9) 국토교통부 (2016), 자동차안전평가시험등에관한규정 10) 김규옥, 문영준, 조선아, 이종덕 (2016), 자율주행자동차윤리및운전자수용성기초연구, 한국교통연구원 11) 김문식, 문종덕, 이재득 (2015), 유럽의자율주행자동차기술로드맵 (EPoSS, ERTRAC) 분석, pp. 63, 자동차부품연구원, 한국산업기술평가관리원 12) 대한교통학회 (2017), 자율주행차상용화대비교통안전교육과정개발, 도로교통공단 13) 박인우 (2017), 자율주행 ADAS의시대. 투자는센서시장에, 미래에셋대우 14) 박종선, 한병화, 한상응 (2017), 신정부출범과 4차산업혁명 자율주행차, 유진투자증권
111 15) 박푸르뫼 (2017), 국내 외동향을통해살펴본국내자율주행차산업의개선점, 정보통신산업진흥원 16) 법제처 (2018), 자동차및자동차부품의성능과기준에관한규칙, 자동차안전도평가시험등에관한규정 17) 송유승 (2017), 스마트자동차 : 자율주행자동차기술동향, 정보통신기술진흥센터, 주간기술동향 18) 스마트하이웨이사업단 (2015), 스마트자율협력주행도로시스템개발연구개발계획서, 한국도로공사 19) 아주대학교, 충북대학교 (2017), 자율주행자동차기술상용화대비운전면허시험제도수립연구, 도로교통공단 20) 아주대학교 (2018), 자율주행자동차안전성평가기술및테스트베드개발, 한국교통안전공단 21) 윤일수 (2018), 자율주행및 C-ITS 강의자료, 아주대학교 22) 이현숙 (2017), 자율주행자동차기술개발의특징및정책동향, 융합연구정책센터 23) 일본조사회 (2018), 2018 일본자율주행차시장전망과개발전략, pp ) 자동차부품연구원 (2017), 자율주행차산업관련규제현황 25) 좋은정보사, 미래형자동차분야별세부사항동향과주요기술개발동향및사례분석 26) 만도 (2018), 국내 ADAS 개발동향. 경기연구원발표자료 27) 최치권 (2018), Introduction to Mando ADAS, 경기연구원세미나발표자료 28) 한국과학기술원, 한국건설기술연구원 (2016), 인공지능기반미래도로구축방안연구, 국토교통부 29) 한국교통연구원 (2016), 자율주행자동차안전성평가기술개발및실도로평가환경구축상세기획연구보고서, 한국교통안전공단 30) 한국도로공사 (2017), VR 기반의도로주행시뮬레이터정책동향 31) 한양대학교, 대구경북과학기술원, 상명대학교, 연세대학교, 국민대학교 (2016),
112 자율주행자동차제어권전환안전성평가기술개발및사회적수용성향상기반기술 32) 연구상세기획보고서, 한국교통안전공단 33) 한국ITS학회 (2017), 자율주행차기술도입을위한교통안전시설개선방안연구, 도로교통공단 34) 한국전자통신연구원 (2017), 스마트자동차 : 자율주행자동차기술동향, 정보통신기술진흥센터 35) 현대자동차 (2017), 제네시스 EQ90 사용자매뉴얼 36) 홍윤석 (2015), 자율주행자동차의기능및안전성평가방안, 한국교통연구원, 월간교통 37) 홍익대학교 (2017), 자율주행자동차상용화대비법 제도관점운전면허제도연구, 도로교통공단 38) 하연, V2X 산업동향 자율주행자동차의핵심기술 39) Amnon Shashua and Shai Shalev-Shwartz, A Plan to Develop Safe Autonomous Vehicles. And Prove It, Intel 40) ERTRAC Task Force (Connectivity and Automated Driving) (2015), Automated Driving Roadmap, ERTRAC 41) EURO NCAP (2017), Euro NCAP 2025 Roadmap in Pursiut of Vision Zero 42) Inyong Jeong, Younggun Cho, and Ayoung Kim (2017), Road-SLAM : Road Marking based SLAM with Lane-level Accuracy 43) Mariusz Bojarski et al. (2016), End to End Learning for Self-Driving Cars, arxiv preprint arxiv: ) Mathieu Joerger, Cynthia Jones and Valerie Shuman(2018), Testing Connected and Automated Vehicles (CAVs): Accelerating Innovation, Integration, Deployment and Sharing Results, Road Vehicle Automation 5, Springer, pp ) National Highway Traffic Safety Administration (2016), Federal Automated Vehicle Policy, U.S. Department of Transportation
113 46) National Highway Traffic Safety Administration(2018), A Framework for Automated Driving System Testable Cases and Scenarios 47) Rajat Sagar (2017), Making cars safer through technology innovation, Texas Instruments 48) Shai Shalev-Shwartz, Shaked Shammah, and Amnon Shashua (2017), On a Formal Model of Safe and Scalable Self-driving Cars, arxiv, S.M. Skippon, N. Reed, T. Luke, R. Robbins, M. Chattington(2008). 49) Questionnaire measures of attitudes and driving behaviour: their relationships to driving behaviour measured in d driving simulator, Symposium of The Korean Society of Automotive Engineers, pp ) Jaesik, Lee(2003). A Driving Simulation Study for the Effects of Divided-Attention on Driving Performance: Comparison of Young and Old Drivers, Journal of the Korean Data Analysis Society, Vol.5, No. 4, pp ) Hermann Winner, Karsten Lemmer, Thomas Form and Jens Mazzega (2018), PEGASUS First Steps for the Safe Introduction of Automated Driving, Road Vehicle Automation 5, Springer, pp ) US DOT, NHTSA (2016), Federal Automated Vehicle Policy 53) Inter Mobileye (2018), A formal model of safe and scalable self-driving cars < 웹사이트 > 54) AB Dynamics (2018), AB Dynamics exhibited at the AstaZero Testers' Day event in Sweden, 55) 56) AstaZero, 57) Automobile Association Developments Limited, Which? Co. 58) EURO NCAP,
114 59) Huei Peng and Carrie Morton (2016), M-City. University of Michigan, 60) NHTSA, 61) M-city Test Facility, 62) Mihai Matei, (2016), The Trolley Problem Is A Real One For Self-Driving Cars, 63) 64) Mobility Transformation Center, 65) MTC, 66) Mynewsdesk (2014), AstaZero - the world's first full-scale test environment for future road safety - is being inaugurated today, full-scale-test-environment-for-future-road-safety-is-being-inaugurated-today ) Nvidia, 68) NCSL, AUTONOMOUS VEHICLES, SELF-DRIVING VEHICLES ENACTED LEGISLATION, 69) 70) Sam Littlefair (2017), How Would a Buddhist Monk Solve the Classic Trolley Problem, 71) Simulator, 72) ttps://m.blog.naver.com/postview.nhn?blogid=autolog&logno= &proxyref erer=https%3a%2f%2fwww.google.co.kr%2f 73) 경기도 (2016), 2017년판교제로시티에자율주행자동차다닌다,
115 74) ) 국토교통연구인프라운영원 (2014), 국토교통 2단계대형실험시설 3종유치기관선정, 76) 국토교통부 (2016), 자율주행차기술개발위해손잡다, 77) 78) 대구광역시달성군 (2007), ITS 기반지능형자동차부품시험장건립, 79) 80) 실제도심환경인핀란드헬싱키에서자율주행버스시험운행 81) 82) 핀란드, 승용차필요없는세상시동걸다, 박현정, 83) 84) Inter Mobileye (2018), Baidu to Integrate Mobileye s Responsibility Sensitive Safety Model into Apollo Program, 85) 86) Roboticsbusinessreview (2018), Germany Creates Ethics Rules for Autonomous Vehicles, 87) 88) National Instrument, 차량내부통신, Dispace, MILS / SILS / HILS, 89) driver_assistance_systems.cfm 90) IPG Carmaker,
116 91) VILS, 92) ETRI 자동차융합플랫폼연구팀 (2012), 차량용이더넷기술의현황및동향, 93) 94) 한국전자통신연구원 (2013), 차량용이더넷기술및표준동향, 95) 96) EPNC (2018), 센서퓨전, 업체별최신전략과기술동향, 97) 98) EE TIMES (2015), Vehicle-in-the-Loop Speeds Automotive Design Cycles, 99) 100) 오토저널 (2015), 자율주행기술개발지원을위한 MiLS 기반검증기술, 101) 102) 디지털데일리 (2018), 사람안씁니다 日자동차업체가매료된 HILs, 103) 104) 정보통신기술진흥센터 (2018), 자율주행자동차최근동향및시사점, 105) 106) MDS 테크놀로지 (2010), 실차환경시험의제약극복 다양한용도로실용화되는 HILS, 107) MDS.pdf
 주요연구분야 : 자율주행, 인공지능등 허낙원도로교통공단교통과학연구원자율주행연구처선임연구원아주대학교일반대학원건설교통공학과 ( 박사수료 ) 주요연구분야 : 자율주행, ITS 등 김태경도로교통공단교통과학연구원자율주행연구처연구원연세대학교일반대학원도시공학과 ( 공학박사")
117 도로교통안전의중심, 선진교통문화의리더 도로교통공단은공정한운전면허관리와교통안전관련교육 홍보 연구 방송및 기술개발을통하여교통사고감소와예방에노력하는준정부기관입니다. 본연구는아래의연구진에의해서수행되었습니다. 김중효도로교통공단교통과학연구원자율주행연구처책임연구원전남대학교일반대학원토목공학과 ( 공학박사 ) 주요연구분야 : 자율주행, 인공지능등 허낙원도로교통공단교통과학연구원자율주행연구처선임연구원아주대학교일반대학원건설교통공학과 ( 박사수료 ) 주요연구분야 : 자율주행, ITS 등 김태경도로교통공단교통과학연구원자율주행연구처연구원연세대학교일반대학원도시공학과 ( 공학박사 ) 주요연구분야 : 자율주행, 인공지능등 이경석도로교통공단교통과학연구원자율주행연구처연구원고려대학교일반대학원전자전기공학과 ( 공학석사 ) 주요연구분야 : 자율주행, ITS 등 연구보고서 자율주행 AI 운전능력평가기법및 모형개발에관한연구 Ⅰ 발행인 : 윤종기편집인 : 정준하발행처 : 도로교통공단교통과학연구원강원도원주시혁신로 2( 반곡동 ) TEL : 033) ( 대 ) FAX : 033) 인쇄일자 : 발행일자 : 인쇄처 : ( 사 ) 한국장애인상생복지회
담당부서 보도자료 배포일시 화 총 매 본문 참고 과장정의경 서기관이창기 주무관최문갑첨단자동차기술과담당자 보도일시 2016 년 8 월 10 일 ( 수 ) 조간부터보도하여주시기바랍니다. 통신 방송 인터넷은 8. 9( 화 ) 11:00 이후보도가능 자율주행실험도시 (K-Ci
 조간부터보도하여주시기바랍니다. 통신 방송 인터넷은 8. 9( 화 ) 11:00 이후보도가능 자율주행실험도시 (K-Ci") 담당부서 보도자료 배포일시 화 총 매 본문 참고 과장정의경 서기관이창기 주무관최문갑첨단자동차기술과담당자 보도일시 2016 년 8 월 10 일 ( 수 ) 조간부터보도하여주시기바랍니다. 통신 방송 인터넷은 8. 9( 화 ) 11:00 이후보도가능 자율주행실험도시 (K-City) 구축의첫삽을뜨다 - 국토교통부 K-City 착수보고회가져 - 국토교통부 장관강호인 는
담당부서 보도자료 배포일시 화 총 매 본문 참고 과장정의경 서기관이창기 주무관최문갑첨단자동차기술과담당자 보도일시 2016 년 8 월 10 일 ( 수 ) 조간부터보도하여주시기바랍니다. 통신 방송 인터넷은 8. 9( 화 ) 11:00 이후보도가능 자율주행실험도시 (K-City) 구축의첫삽을뜨다 - 국토교통부 K-City 착수보고회가져 - 국토교통부 장관강호인 는
ICT À¶ÇÕÃÖÁ¾
 Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
PERFORMANCE technology the all-new bmw 5 series. dynamic 06 business 14 comfort 20 safety 22 model LineuP 24 TecHnicaL data 26 bmw service 28 bmw kore
 sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9
![ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9](/thumbs/40/22040462.jpg "ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9") 오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (
 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (") 제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
2002report hwp
 2002 연구보고서 210-23 가족법상친권 양육권및면접교섭권제도의실효성확보방안연구 한국여성개발원 발간사 연구요약. 연구의목적 . 가족법상친권 양육권및면접교섭권제도의내용 1. 친권에관한검토 2. 양육권에관한검토 3. 면접교섭권에관한검토 4. 관련문제점 . 가족법상친권 양육권 면접교섭권제도의시행현황 1. 공식통계를통해본시행현황 2. 친권 양육권 면접교섭권관련법원실무
2002 연구보고서 210-23 가족법상친권 양육권및면접교섭권제도의실효성확보방안연구 한국여성개발원 발간사 연구요약. 연구의목적 . 가족법상친권 양육권및면접교섭권제도의내용 1. 친권에관한검토 2. 양육권에관한검토 3. 면접교섭권에관한검토 4. 관련문제점 . 가족법상친권 양육권 면접교섭권제도의시행현황 1. 공식통계를통해본시행현황 2. 친권 양육권 면접교섭권관련법원실무
장애인건강관리사업
 장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
- 2 -
 - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
- 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구
홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구") 2015-0213-025 2015년판 교통사고통계 요약 어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구축 관리 분석)하여 교통안전정책 수립
2015-0213-025 2015년판 교통사고통계 요약 어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구축 관리 분석)하여 교통안전정책 수립
특집1 국내 자전거 교통사고 현황과 특징 망자가 차지하는 비중은 오히려 증가(4.9% 5.5%)하 여 사고의 심각성은 더욱 커졌다고 할 수 있다. 나아가 2%대인 자전거 수단분담률에 비해 전체 교통사고 중 자전거사고가 약 5%를 차지하고 있다는 점은 향후 자 전거 안전
하 여 사고의 심각성은 더욱 커졌다고 할 수 있다. 나아가 2%대인 자전거 수단분담률에 비해 전체 교통사고 중 자전거사고가 약 5%를 차지하고 있다는 점은 향후 자 전거 안전") 자전거 교통안전의 현주소와 개선 방향 국내 자전거 교통사고 현황과 특징 Theme 01 국내 자전거교통 인프라 및 시설 확충은 2010년 이후 지속적으로 성장하고 있으나, 자전거의 사고 및 위험성도 증대 되고 있는 실정이다. 따라서 앞으로는 자전거 이용자의 안전 증진 및 사고 예방을 위한 제도 개선과 정책 시행이 필요 하다. 이 글에서는 최근 국내 자전거 교통
자전거 교통안전의 현주소와 개선 방향 국내 자전거 교통사고 현황과 특징 Theme 01 국내 자전거교통 인프라 및 시설 확충은 2010년 이후 지속적으로 성장하고 있으나, 자전거의 사고 및 위험성도 증대 되고 있는 실정이다. 따라서 앞으로는 자전거 이용자의 안전 증진 및 사고 예방을 위한 제도 개선과 정책 시행이 필요 하다. 이 글에서는 최근 국내 자전거 교통
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
2016년 신호등 3월호 내지A.indd
 www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 -
 안양시도로조명시설설치및관리에관한조례안 1. 제정이유 2. 주요내용 - 1 - 3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 - 안양시도로조명시설설치및관리에관한조례안 - 3 - ➃ - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 별표 1 도로및교통의종류에따른도로조명등급 ( 제 6 조관련 ),,.,,,,,
안양시도로조명시설설치및관리에관한조례안 1. 제정이유 2. 주요내용 - 1 - 3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 - 안양시도로조명시설설치및관리에관한조례안 - 3 - ➃ - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 별표 1 도로및교통의종류에따른도로조명등급 ( 제 6 조관련 ),,.,,,,,
목 차 추진배경 1 개발및지원동향 2 상용화지원방안 6 1. 규제개선및제도정비 7 2. 자율주행기술개발지원 자율주행지원인프라확충 12 Ⅳ. 상용화추진일정및실행계획 15 Ⅴ. 기대효과 17
 자율주행차상용화지원방안 2015. 5. 6 관계부처합동 목 차 추진배경 1 개발및지원동향 2 상용화지원방안 6 1. 규제개선및제도정비 7 2. 자율주행기술개발지원 10 3. 자율주행지원인프라확충 12 Ⅳ. 상용화추진일정및실행계획 15 Ⅴ. 기대효과 17 Ⅰ. 추진배경 최근 자동차산업은기존기계공학과정보통신 센서 위성항법등 첨단기술이총집약된자율주행자동차로빠르게진화중
자율주행차상용화지원방안 2015. 5. 6 관계부처합동 목 차 추진배경 1 개발및지원동향 2 상용화지원방안 6 1. 규제개선및제도정비 7 2. 자율주행기술개발지원 10 3. 자율주행지원인프라확충 12 Ⅳ. 상용화추진일정및실행계획 15 Ⅴ. 기대효과 17 Ⅰ. 추진배경 최근 자동차산업은기존기계공학과정보통신 센서 위성항법등 첨단기술이총집약된자율주행자동차로빠르게진화중
경북자동차부품관련연구소의효율적 운영방안
 2009-046 경북자동차부품관련연구소의효율적 운영방안 차례 표차례 그림차례 요약 1. 연구배경및목적,,, IT. 3,.,.. 2. 국내 지역자동차산업현황 2007 20.3 GDP 2.5%. 9%, 12%, 13%, 07 409, 285 5, 147 2.9. 8.6%, 7.0%, 4.5%, i . ( ) ( ) ( ) 4,577 277,319 38,865,170
2009-046 경북자동차부품관련연구소의효율적 운영방안 차례 표차례 그림차례 요약 1. 연구배경및목적,,, IT. 3,.,.. 2. 국내 지역자동차산업현황 2007 20.3 GDP 2.5%. 9%, 12%, 13%, 07 409, 285 5, 147 2.9. 8.6%, 7.0%, 4.5%, i . ( ) ( ) ( ) 4,577 277,319 38,865,170
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론
 이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
이도경, 최덕재 Dokyeong Lee, Deokjai Choi 1. 서론 2. 관련연구 2.1 MQTT 프로토콜 Fig. 1. Topic-based Publish/Subscribe Communication Model. Table 1. Delivery and Guarantee by MQTT QoS Level 2.1 MQTT-SN 프로토콜 Fig. 2. MQTT-SN
Ⅰ Ⅱ Ⅲ Ⅳ
 제 2 차유비쿼터스도시종합계획 국토교통부 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ - 4 - 1 배경및법적근거 2 계획의수립방향 - 3 - 3 계획수립의성격및역할 4 계획수립경위 - 4 - Ⅱ 1 국내외여건변화 가. 현황 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - 나. 문제점및기본방향 - 14 - 2 국내 U-City 현황 가. 현황 -
제 2 차유비쿼터스도시종합계획 국토교통부 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ - 4 - 1 배경및법적근거 2 계획의수립방향 - 3 - 3 계획수립의성격및역할 4 계획수립경위 - 4 - Ⅱ 1 국내외여건변화 가. 현황 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - 나. 문제점및기본방향 - 14 - 2 국내 U-City 현황 가. 현황 -
슬라이드 1
 IT R&D Global Leader 자율협력주행을위한 V2X 통신기술 Krnet2017 미래자율주행자동차세션 2 목차 1 협력주행기술개념 2 협력주행서비스 3 V2X 통신기술표준 4 V2X 통신기술개발 3 1 협력주행기술개념 4 협력주행기술개념 자율주행기술 : 센서를이용한자율주행 협력자율주행기술 : 통신인프라와연계한자율주행 Google s Autonomous
IT R&D Global Leader 자율협력주행을위한 V2X 통신기술 Krnet2017 미래자율주행자동차세션 2 목차 1 협력주행기술개념 2 협력주행서비스 3 V2X 통신기술표준 4 V2X 통신기술개발 3 1 협력주행기술개념 4 협력주행기술개념 자율주행기술 : 센서를이용한자율주행 협력자율주행기술 : 통신인프라와연계한자율주행 Google s Autonomous
보험판매와 고객보호의 원칙
 ..... 61),,,, IT,.,. 2020-2040. IT...... 1 10.. (No Fault). (No Fault). (No Fault). * /. (2016.12.08), (2016.12.24), (2016.12.26) - 243 - 10 2 (2016).... 1),,.,,,.,. 2) (National Highway Traffic Safety
..... 61),,,, IT,.,. 2020-2040. IT...... 1 10.. (No Fault). (No Fault). (No Fault). * /. (2016.12.08), (2016.12.24), (2016.12.26) - 243 - 10 2 (2016).... 1),,.,,,.,. 2) (National Highway Traffic Safety
국도_34호선(용궁~개포)건설사업_최종출판본.hwp
건설사업_최종출판본.hwp") 2011 년도타당성재조사보고서 국도 34 호선 ( 용궁 ~ 개포 ) 건설사업타당성재조사 공공투자관리센터 한국개발연구원 요약 Ⅰ. 타당성재조사의개요 1. 사업의배경및목적 4. 34 ~... 2. 사업의추진경위및개요 : 23 2010-10 : ~ : L= 5.0km(4 ) : 764 : 100%() : 2013~2018 (6 ) < 표 1> 총사업비내역 (:
2011 년도타당성재조사보고서 국도 34 호선 ( 용궁 ~ 개포 ) 건설사업타당성재조사 공공투자관리센터 한국개발연구원 요약 Ⅰ. 타당성재조사의개요 1. 사업의배경및목적 4. 34 ~... 2. 사업의추진경위및개요 : 23 2010-10 : ~ : L= 5.0km(4 ) : 764 : 100%() : 2013~2018 (6 ) < 표 1> 총사업비내역 (:
[11하예타] 교외선 인쇄본_ver3.hwp
![[11하예타] 교외선 인쇄본_ver3.hwp](/thumbs/81/84006372.jpg "[11하예타] 교외선 인쇄본_ver3.hwp") 2012 년도예비타당성조사보고서 교외선 ( 능곡 ~ 의정부 ) 철도사업 2012. 7. 요약 요약 제 1 장예비타당성조사의개요 1. 사업추진배경 2000 5 16, 2004 4 1,, 2006 -,, 39,., ~~, 2. 사업의추진경위및추진주체 2004. 12: (~) () - 21 (B/C=0.34). 2010. 04~2012. 02: (~) () - (B/C=0.53,
2012 년도예비타당성조사보고서 교외선 ( 능곡 ~ 의정부 ) 철도사업 2012. 7. 요약 요약 제 1 장예비타당성조사의개요 1. 사업추진배경 2000 5 16, 2004 4 1,, 2006 -,, 39,., ~~, 2. 사업의추진경위및추진주체 2004. 12: (~) () - 21 (B/C=0.34). 2010. 04~2012. 02: (~) () - (B/C=0.53,
학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental Ta
 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental Ta") www.sen.go.kr 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의 시설 설비및교구기준연구 2012. 10. 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental
www.sen.go.kr 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의 시설 설비및교구기준연구 2012. 10. 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental
조사보고서 구조화금융관점에서본금융위기 분석및시사점
 조사보고서 2009-8 구조화금융관점에서본금융위기 분석및시사점 Ⅰ. 서론 Ⅱ. 구조화금융의미시적시장구조 2 조사보고서 2009-08 요약 3 Ⅲ. 서브프라임위기의현황과분석 4 조사보고서 2009-08 Ⅳ. 서브프라임위기의원인및특징 요약 5 6 조사보고서 2009-08 Ⅴ. 금융위기의파급경로 Ⅵ. 금융위기극복을위한정책대응 요약 7 8 조사보고서 2009-08
조사보고서 2009-8 구조화금융관점에서본금융위기 분석및시사점 Ⅰ. 서론 Ⅱ. 구조화금융의미시적시장구조 2 조사보고서 2009-08 요약 3 Ⅲ. 서브프라임위기의현황과분석 4 조사보고서 2009-08 Ⅳ. 서브프라임위기의원인및특징 요약 5 6 조사보고서 2009-08 Ⅴ. 금융위기의파급경로 Ⅵ. 금융위기극복을위한정책대응 요약 7 8 조사보고서 2009-08
untitled
 국문요약....,,... 2,,. 3.,. 4. 5. Abstract Demographic change is greatly accelerating owing to the increasingly low birth rate and aging population in Korea. In particular, the increase in the number of elderly
국문요약....,,... 2,,. 3.,. 4. 5. Abstract Demographic change is greatly accelerating owing to the increasingly low birth rate and aging population in Korea. In particular, the increase in the number of elderly
ㅇ ㅇ
 ㅇ ㅇ ㅇ 1 ㆍ 2 3 4 ㅇ 1 ㆍ 2 3 ㅇ 1 2 ㆍ ㅇ 1 2 3 ㆍ 4 ㆍ 5 6 ㅇ ㆍ ㆍ 1 2 ㆍ 3 4 5 ㅇ 1 2 3 ㅇ 1 2 3 ㅇ ㅇ ㅇ 붙임 7 대추진전략및 27 개세부추진과제 제 5 차국가공간정보정책기본계획 (2013~2017) 2013. 10 국토교통부 : 2013 2017 차 례 제 1 장창조사회를견인하는국가공간정보정책
ㅇ ㅇ ㅇ 1 ㆍ 2 3 4 ㅇ 1 ㆍ 2 3 ㅇ 1 2 ㆍ ㅇ 1 2 3 ㆍ 4 ㆍ 5 6 ㅇ ㆍ ㆍ 1 2 ㆍ 3 4 5 ㅇ 1 2 3 ㅇ 1 2 3 ㅇ ㅇ ㅇ 붙임 7 대추진전략및 27 개세부추진과제 제 5 차국가공간정보정책기본계획 (2013~2017) 2013. 10 국토교통부 : 2013 2017 차 례 제 1 장창조사회를견인하는국가공간정보정책
.................................................hwp
 10.0% 9.0% 8.6% 8.7% 8.9% 8.8% 9.3% 9.0% 8.0% 7.0% 6.0% 5.0% 5.3% 5.7% 5.3% 5.3% 5.9% 6.1% 4.0% 1995 1996 1997 1998 1999 2000 도심 시계 총 통 행 심 야 시 간 대 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 등교 배웅 학원
10.0% 9.0% 8.6% 8.7% 8.9% 8.8% 9.3% 9.0% 8.0% 7.0% 6.0% 5.0% 5.3% 5.7% 5.3% 5.3% 5.9% 6.1% 4.0% 1995 1996 1997 1998 1999 2000 도심 시계 총 통 행 심 야 시 간 대 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% 등교 배웅 학원
 신 재생에너지공급의무화 (RPS) 제도 Contents - 목차 - 1. 신에너지및재생에너지개발 이용 보급촉진법령 2. 신 재생에너지공급의무화제도관리및운영지침 3. 공급인증서발급및거래시장운영에관한규칙 신에너지및재생에너지 개발 이용 보급촉진법령 신 재생에너지공급의무화 (RPS) 제도 5 법률시행령시행규칙 신에너지및재생에너지개발 이용 보급촉진법 신에너지및재생에너지개발
신 재생에너지공급의무화 (RPS) 제도 Contents - 목차 - 1. 신에너지및재생에너지개발 이용 보급촉진법령 2. 신 재생에너지공급의무화제도관리및운영지침 3. 공급인증서발급및거래시장운영에관한규칙 신에너지및재생에너지 개발 이용 보급촉진법령 신 재생에너지공급의무화 (RPS) 제도 5 법률시행령시행규칙 신에너지및재생에너지개발 이용 보급촉진법 신에너지및재생에너지개발
임베디드2014(가을)
") 2014 Autumn Vol.8 www.givet.re.kr 2014 Autumn News Letter 2014 Autumn Vol.8 News Letter CONTENTS GIVET Autumn 04 05 이천십사년 가을호 뉴스레터 FOCUS_ 2014년 기업지원사업 성과 기업지원성과 1 2013 경북디지털기기부품산업 패키지역량강화사업 사업기간 : 2013년
2014 Autumn Vol.8 www.givet.re.kr 2014 Autumn News Letter 2014 Autumn Vol.8 News Letter CONTENTS GIVET Autumn 04 05 이천십사년 가을호 뉴스레터 FOCUS_ 2014년 기업지원사업 성과 기업지원성과 1 2013 경북디지털기기부품산업 패키지역량강화사업 사업기간 : 2013년
열거형 교차형 전개형 상승형 외주형 회전형 도해패턴 계층형 구분형 확산형 합류형 대비형 상관형 (C) 2010, BENESO All Rights Reserved 2
 2010, BENESO All Rights Reserved 2") c 2010, BENESO All rights reserved 1 열거형 교차형 전개형 상승형 외주형 회전형 도해패턴 계층형 구분형 확산형 합류형 대비형 상관형 (C) 2010, BENESO All Rights Reserved 2 u 열거형 : 대소, 위치등의관계에대해설명 u 교차형 : 중복, 합동, 복합, 공동등의관계에대해설명 설명도, 대소관계도, 제휴관계도,
c 2010, BENESO All rights reserved 1 열거형 교차형 전개형 상승형 외주형 회전형 도해패턴 계층형 구분형 확산형 합류형 대비형 상관형 (C) 2010, BENESO All Rights Reserved 2 u 열거형 : 대소, 위치등의관계에대해설명 u 교차형 : 중복, 합동, 복합, 공동등의관계에대해설명 설명도, 대소관계도, 제휴관계도,
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 한국직업자격학회
 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
목 차
 Ⅴ. 광교지구택지개발사업지구단위계획결정 ( 변경 ) 도서 목 차 Ⅴ. 광교지구택지개발사업지구단위계획결정 ( 변경 ) 도서 1. 지구단위계획구역결정 ( 변경 ) 조서 가. 총괄 ( 변경없음 ) 도면표시번호 구역명위치 기정 면 적 ( m2 ) 변경후 변경 계 1단계 2단계 비고 - 수원시영통구매탄동, 이의동, 광교지구원천동, 하동, 팔달구우만동, 제1종지구단위계장안구연무동일원획구역용인시수지구상현동,
Ⅴ. 광교지구택지개발사업지구단위계획결정 ( 변경 ) 도서 목 차 Ⅴ. 광교지구택지개발사업지구단위계획결정 ( 변경 ) 도서 1. 지구단위계획구역결정 ( 변경 ) 조서 가. 총괄 ( 변경없음 ) 도면표시번호 구역명위치 기정 면 적 ( m2 ) 변경후 변경 계 1단계 2단계 비고 - 수원시영통구매탄동, 이의동, 광교지구원천동, 하동, 팔달구우만동, 제1종지구단위계장안구연무동일원획구역용인시수지구상현동,
2001 년 4 월전력산업구조개편과함께출범한전력거래소는전력산업의중심 기관으로서전력시장및전력계통운영, 전력수급기본계획수립지원의기능을 원활히수행하고있습니다. 전력거래소는전력자유화와함께도입된발전경쟁시장 (CBP) 을지속 적인제도개선을통해안정적으로운영하고있으며, 계통운영및수급
 을지속 적인제도개선을통해안정적으로운영하고있으며, 계통운영및수급") 2001 년 4 월전력산업구조개편과함께출범한전력거래소는전력산업의중심 기관으로서전력시장및전력계통운영, 전력수급기본계획수립지원의기능을 원활히수행하고있습니다. 전력거래소는전력자유화와함께도입된발전경쟁시장 (CBP) 을지속 적인제도개선을통해안정적으로운영하고있으며, 계통운영및수급 계획수립등전력수급안정에도최선의노력을기울이고있습니다. 이번에발간하는 2016년발전설비현황은
2001 년 4 월전력산업구조개편과함께출범한전력거래소는전력산업의중심 기관으로서전력시장및전력계통운영, 전력수급기본계획수립지원의기능을 원활히수행하고있습니다. 전력거래소는전력자유화와함께도입된발전경쟁시장 (CBP) 을지속 적인제도개선을통해안정적으로운영하고있으며, 계통운영및수급 계획수립등전력수급안정에도최선의노력을기울이고있습니다. 이번에발간하는 2016년발전설비현황은
신규투자사업에 대한 타당성조사(최종보고서)_v10_클린아이공시.hwp
_v10_클린아이공시.hwp") 신규투자사업에 대한 타당성 조사 (요약본) 2015. 4. 지방공기업평가원 제주관광공사가부족한쇼핑인프라를보완하고, 수익을제주관광진흥에재투자하여 관광산업활성화와관광마케팅재원확보 라는양대목적달성에기여하고공기업으로서사회적책임을다하고자시내면세점사업에투자하려는의사결정에대한타당도는전반적으로볼때 긍정 으로평가할수있음 역할및필요성 대내 외환경 정책및법률 경제성기대효과
신규투자사업에 대한 타당성 조사 (요약본) 2015. 4. 지방공기업평가원 제주관광공사가부족한쇼핑인프라를보완하고, 수익을제주관광진흥에재투자하여 관광산업활성화와관광마케팅재원확보 라는양대목적달성에기여하고공기업으로서사회적책임을다하고자시내면세점사업에투자하려는의사결정에대한타당도는전반적으로볼때 긍정 으로평가할수있음 역할및필요성 대내 외환경 정책및법률 경제성기대효과
2016년 신호등 10월호 내지.indd
 www.koroad.or.kr E-book 10 2016. Vol. 434 62 C o n t e n t s 50 58 46 24 04 20 46 06 08, 3 3 10 12,! 16 18 24, 28, 30 34 234 38? 40 2017 LPG 44 Car? 50 KoROAD(1) 2016 54 KoROAD(2), 58, 60, 62 KoROAD 68
www.koroad.or.kr E-book 10 2016. Vol. 434 62 C o n t e n t s 50 58 46 24 04 20 46 06 08, 3 3 10 12,! 16 18 24, 28, 30 34 234 38? 40 2017 LPG 44 Car? 50 KoROAD(1) 2016 54 KoROAD(2), 58, 60, 62 KoROAD 68
경상북도와시 군간인사교류활성화방안
 2010-14 경상북도와시 군간인사교류활성화방안 목 차 경상북도와시 군간인사교류활성화방안 요약,,,, 4, 5, 6,,,,, 5 58 1:1 34, 24 ( 13, 11 ) 2010 2017 8 i (5 8 ),.,, 74 (4 3, 5 19, 6 52 ) (4~6 4,901 ) 1.5% 5% ii 제 1 장 연구개요 1 연구배경과목적 2 연구범위와방법
2010-14 경상북도와시 군간인사교류활성화방안 목 차 경상북도와시 군간인사교류활성화방안 요약,,,, 4, 5, 6,,,,, 5 58 1:1 34, 24 ( 13, 11 ) 2010 2017 8 i (5 8 ),.,, 74 (4 3, 5 19, 6 52 ) (4~6 4,901 ) 1.5% 5% ii 제 1 장 연구개요 1 연구배경과목적 2 연구범위와방법
i
 i ii iii iv v vi 요약 요약 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 2 장기존연구검토및연구방향설정 제1절수송분담구조관련지표들제2절수송실적관련자료현황제3절표본조사에근거한수송분담률산정제4절연구방향설정
i ii iii iv v vi 요약 요약 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 2 장기존연구검토및연구방향설정 제1절수송분담구조관련지표들제2절수송실적관련자료현황제3절표본조사에근거한수송분담률산정제4절연구방향설정
☆5.명묘희(2차수정)경찰학연구제33호.hwp
경찰학연구제33호.hwp") 교통수단의구분및관리에대한도로교통관계법령개정방안연구 The Revision of Road Traffic Act of Classification and Management of Diverse Transport Modes 명묘희 * Ⅰ. 서론 1) Ⅱ. 선행연구및정책동향 Ⅲ. 교통수단구분및관리에관한입법현황 Ⅳ. 국제협약및외국사례에대한비교법적고찰 Ⅴ. 교통수단관리의문제점분석및정책제언
교통수단의구분및관리에대한도로교통관계법령개정방안연구 The Revision of Road Traffic Act of Classification and Management of Diverse Transport Modes 명묘희 * Ⅰ. 서론 1) Ⅱ. 선행연구및정책동향 Ⅲ. 교통수단구분및관리에관한입법현황 Ⅳ. 국제협약및외국사례에대한비교법적고찰 Ⅴ. 교통수단관리의문제점분석및정책제언
<BBEAC0E7BAB8C7E8C1A6B5B52E687770>
 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp
![[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp](/thumbs/91/104626366.jpg "[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp") 2010 년도예비타당성조사보고서 광주도시철도 2 호선건설사업 공공투자관리센터 한국개발연구원 요 약 요약 Ⅰ. 예비타당성조사의개요 1. 사업의배경및목적,,. 2 2002 2005, 2010. 2015 2. 1 1 2015 2 2. 사업추진경위 2002, 2005 (B/C=1.42, AHP=0.606), ( )., 5, 2 ( () ). - (2010.2).
2010 년도예비타당성조사보고서 광주도시철도 2 호선건설사업 공공투자관리센터 한국개발연구원 요 약 요약 Ⅰ. 예비타당성조사의개요 1. 사업의배경및목적,,. 2 2002 2005, 2010. 2015 2. 1 1 2015 2 2. 사업추진경위 2002, 2005 (B/C=1.42, AHP=0.606), ( )., 5, 2 ( () ). - (2010.2).
2016년 신호등 4월호 내지A.indd
 www.koroad.or.kr E-book 04 2016. Vol. 428 30 C o n t e n t s 08 50 24 46 04 20 46,, 06 24 50!! 08? 28, 54 KoROAD(1)! 12 30 58 KoROAD(2) (School Zone) 16 60 34 18 62 38, 64 KoROAD, 40 11 (IBA) 4!, 68. 428
www.koroad.or.kr E-book 04 2016. Vol. 428 30 C o n t e n t s 08 50 24 46 04 20 46,, 06 24 50!! 08? 28, 54 KoROAD(1)! 12 30 58 KoROAD(2) (School Zone) 16 60 34 18 62 38, 64 KoROAD, 40 11 (IBA) 4!, 68. 428
PowerPoint 프레젠테이션
 GIS기술 동향과 전망 KOREA GEOSPATIAL INFORMATION & COMMUNICATION CO.,LTD. GIS GIS WWW Browser User request Deliver Results Invoke Translate Results Return Results CGI Script Send Variables GIS Server
GIS기술 동향과 전망 KOREA GEOSPATIAL INFORMATION & COMMUNICATION CO.,LTD. GIS GIS WWW Browser User request Deliver Results Invoke Translate Results Return Results CGI Script Send Variables GIS Server
 연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
중점협력국 대상 국가협력전략 ( 9 개국 ) ᆞ 5 ᆞ 30 관계부처 합동
 ᆞ 5 ᆞ 30 관계부처 합동") 중점협력국대상국가협력전략 (9 개국 ) - 콜롬비아, 방글라데시, 아제르바이잔, 르완다, 볼리비아, 우간다, 우즈베키스탄, 인도네시아, 파라과이 - 2016. 5. 30. 관계부처합동 중점협력국 대상 국가협력전략 ( 9 개국 ) 2 0 1 6 ᆞ 5 ᆞ 30 관계부처 합동 총목차 1. 콜롬비아국가협력전략 1 2. 방글라데시국가협력전략 38 3. 아제르바이잔국가협력전략
중점협력국대상국가협력전략 (9 개국 ) - 콜롬비아, 방글라데시, 아제르바이잔, 르완다, 볼리비아, 우간다, 우즈베키스탄, 인도네시아, 파라과이 - 2016. 5. 30. 관계부처합동 중점협력국 대상 국가협력전략 ( 9 개국 ) 2 0 1 6 ᆞ 5 ᆞ 30 관계부처 합동 총목차 1. 콜롬비아국가협력전략 1 2. 방글라데시국가협력전략 38 3. 아제르바이잔국가협력전략
지도임자_1204_출판(최종).hwp
.hwp") 2012 년도수요예측재조사보고서 국도 24 호선 ( 지도 ~ 임자 ) 건설사업 2012. 12 요 약 Ⅰ. 수요예측재조사의개요 1. 사업의개요 24(~) 4.99km 2 1975, 2006,, : L=4.99km(B=11.0m, V=60km/h) 3 1,955m( 2 1,920m), 3 : 182,151 ( 100%) : ~ : 2012 2019 (8) :
2012 년도수요예측재조사보고서 국도 24 호선 ( 지도 ~ 임자 ) 건설사업 2012. 12 요 약 Ⅰ. 수요예측재조사의개요 1. 사업의개요 24(~) 4.99km 2 1975, 2006,, : L=4.99km(B=11.0m, V=60km/h) 3 1,955m( 2 1,920m), 3 : 182,151 ( 100%) : ~ : 2012 2019 (8) :
5월전체 :7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26
 5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업
 2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업 목차 i 목 차 iv 목차 표목차 목차 v vi 목차 목차 vii 그림목차 viii 목차 요 약 요약 1 요 약 제 1 장사업개요및조사방법 4 차세대바이오그린 21 사업사업계획적정성재검토보고서 : * ( 15 ) 요약 5 : 6 차세대바이오그린 21 사업사업계획적정성재검토보고서 요약 7 8
2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업 목차 i 목 차 iv 목차 표목차 목차 v vi 목차 목차 vii 그림목차 viii 목차 요 약 요약 1 요 약 제 1 장사업개요및조사방법 4 차세대바이오그린 21 사업사업계획적정성재검토보고서 : * ( 15 ) 요약 5 : 6 차세대바이오그린 21 사업사업계획적정성재검토보고서 요약 7 8
자산관리서비스선진화방안(인쇄).hwp
.hwp") 경영보고서 2009-2 자산관리서비스활성화방안 보험연구원 Ⅰ. 서론 2 경영보고서 2009-02 Ⅱ. 자산관리서비스에대한논리적검토 요약 3 4 경영보고서 2009-02 Ⅲ. 국내외자산관리서비스현황 요약 5 운용전략 운용전략 자산관리서비스유형 유가증권 뮤추얼펀드 상장지수펀드 운용전략 1 운용전략 2 SMA MDA MDA 6 경영보고서 2009-02
경영보고서 2009-2 자산관리서비스활성화방안 보험연구원 Ⅰ. 서론 2 경영보고서 2009-02 Ⅱ. 자산관리서비스에대한논리적검토 요약 3 4 경영보고서 2009-02 Ⅲ. 국내외자산관리서비스현황 요약 5 운용전략 운용전략 자산관리서비스유형 유가증권 뮤추얼펀드 상장지수펀드 운용전략 1 운용전략 2 SMA MDA MDA 6 경영보고서 2009-02
 ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임
 학교안전기준현황파악 ᆞ 분석및 개선방안연구 본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임 목 차 학교안전기준현황파악ㆍ분석및개선방안연구 Ⅰ. 서론 / 1 1. 3 2. 4. 4. 6 3. 8 4. 8 Ⅱ. 국내학교안전관리법규현황 / 9 1. 11 2. 34 Ⅲ. 주요국의학교안전관리법규현황 / 49 1. 51 2. 114 3.
학교안전기준현황파악 ᆞ 분석및 개선방안연구 본연구는교육부특별교부금사업으로서울산광역시교육청으로부터예산이지원된정책연구과제임 목 차 학교안전기준현황파악ㆍ분석및개선방안연구 Ⅰ. 서론 / 1 1. 3 2. 4. 4. 6 3. 8 4. 8 Ⅱ. 국내학교안전관리법규현황 / 9 1. 11 2. 34 Ⅲ. 주요국의학교안전관리법규현황 / 49 1. 51 2. 114 3.
 신청서작성 신청접수 신청서보완 신청서검토 신청제품공지및의견서접수 생산실태조사협조 생산실태조사 생산실태조사 지정심사참석 지정심사 지정심사 ( 물품및법인평가 ) 지정심사는분야별 5~10 인의 외부심사위원으로구성 지정심사결과확인 지정심사결과보고 최종심사 조달청계약심사협의회 지정결과확인 우수조달공동상표물품지정 지정증서 ( 별도발송 및직접수령 ) 지정증서수여 지정관리심사
신청서작성 신청접수 신청서보완 신청서검토 신청제품공지및의견서접수 생산실태조사협조 생산실태조사 생산실태조사 지정심사참석 지정심사 지정심사 ( 물품및법인평가 ) 지정심사는분야별 5~10 인의 외부심사위원으로구성 지정심사결과확인 지정심사결과보고 최종심사 조달청계약심사협의회 지정결과확인 우수조달공동상표물품지정 지정증서 ( 별도발송 및직접수령 ) 지정증서수여 지정관리심사
활력있는경제 튼튼한재정 안정된미래 년세법개정안 기획재정부
 활력있는경제 튼튼한재정 안정된미래 2 012 년세법개정안 기획재정부 목차 Ⅰ. 일자리창출및성장동력확충 1 고용창출지원강화 < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > ㅇ < 개정이유 > < 적용시기 > ㅇ < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 >
활력있는경제 튼튼한재정 안정된미래 2 012 년세법개정안 기획재정부 목차 Ⅰ. 일자리창출및성장동력확충 1 고용창출지원강화 < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 > ㅇ < 개정이유 > < 적용시기 > ㅇ < 개정이유 > < 적용시기 > < 개정이유 > < 적용시기 >
성능 감성 감성요구곡선 평균사용자가만족하는수준 성능요구곡선 성능보다감성가치에대한니즈가증대 시간 - 1 -
 - 1 - 성능 감성 감성요구곡선 평균사용자가만족하는수준 성능요구곡선 성능보다감성가치에대한니즈가증대 시간 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - 감각및자극 (Sensory & Information Stimuli) 개인 (a person) 감성 (Sensibility)
- 1 - 성능 감성 감성요구곡선 평균사용자가만족하는수준 성능요구곡선 성능보다감성가치에대한니즈가증대 시간 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - 감각및자극 (Sensory & Information Stimuli) 개인 (a person) 감성 (Sensibility)
 목 차 국문요약 ⅰ ABSTRACT ⅲ 그림목차 ⅴ 표목차 ⅵ 1 1 3 4 4 5 6 9 11 11 13 16 32 32 3.1.1 초고층건축물의정의 32 3.1.2 대상모델개요 32 3.1.3 대상모델의모델링 35 3.1.4 CFD 해석의경계조건 38 3.1.5 CFD 시뮬레이션 42 53 3.2.1 적용프로그램 54 3.2.2 풍압의적용 54 3.2.3
목 차 국문요약 ⅰ ABSTRACT ⅲ 그림목차 ⅴ 표목차 ⅵ 1 1 3 4 4 5 6 9 11 11 13 16 32 32 3.1.1 초고층건축물의정의 32 3.1.2 대상모델개요 32 3.1.3 대상모델의모델링 35 3.1.4 CFD 해석의경계조건 38 3.1.5 CFD 시뮬레이션 42 53 3.2.1 적용프로그램 54 3.2.2 풍압의적용 54 3.2.3
슬라이드 1
 공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
UDI 이슈리포트제 20 호 울산권개발제한구역의효율적관리방안 도시계획연구실정현욱연구원 052) / < 목차 > 요약 1 Ⅰ. 서론 3 Ⅱ. 울산권개발제한구역의현황및문제점 4 Ⅲ. 외국의개발제구역대안적관리사
 / < 목차 > 요약 1 Ⅰ. 서론 3 Ⅱ. 울산권개발제한구역의현황및문제점 4 Ⅲ. 외국의개발제구역대안적관리사") UDI 이슈리포트제 20 호 울산권개발제한구역의효율적관리방안 2009. 12. 7. 도시계획연구실정현욱연구원 052) 283-7752 / jhw@udi.re.kr < 목차 > 요약 1 Ⅰ. 서론 3 Ⅱ. 울산권개발제한구역의현황및문제점 4 Ⅲ. 외국의개발제구역대안적관리사례 10 Ⅳ. 울산권개발제한구역의효율적관리방안 16 Ⅴ. 결론 21 울산권개발제한구역의효율적관리방안
UDI 이슈리포트제 20 호 울산권개발제한구역의효율적관리방안 2009. 12. 7. 도시계획연구실정현욱연구원 052) 283-7752 / jhw@udi.re.kr < 목차 > 요약 1 Ⅰ. 서론 3 Ⅱ. 울산권개발제한구역의현황및문제점 4 Ⅲ. 외국의개발제구역대안적관리사례 10 Ⅳ. 울산권개발제한구역의효율적관리방안 16 Ⅴ. 결론 21 울산권개발제한구역의효율적관리방안
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
<B8B6B1D4C7CF2DBAD0BEDFB0CBC5E4BFCF2DB1B3C1A4BFCFB7E128C0CCC8ADBFB5292DC0DBBCBAC0DAB0CBC1F5BFCF2DB8D3B8AEB8BB2DB3BBBACEB0CBC1F52E687770>
 가정용 지능로봇의 기술동향 머리말 목 차 제1장 서 론 1 제2장 기술의 특징 4 제3장 가정용 로봇 산업 및 기술수요 전망 14 4장 가정용 로봇의 기술동향 27 5장 주요국의 가정용 로봇의 기술정책 분석 61 6장 국제표준화와 특허출원 동향 80 7장 결론 및 정책 제언 86 참고문헌 92 표 목차 그림 목차 제1장 서 론 1. 기술동향분석의 목적 및
가정용 지능로봇의 기술동향 머리말 목 차 제1장 서 론 1 제2장 기술의 특징 4 제3장 가정용 로봇 산업 및 기술수요 전망 14 4장 가정용 로봇의 기술동향 27 5장 주요국의 가정용 로봇의 기술정책 분석 61 6장 국제표준화와 특허출원 동향 80 7장 결론 및 정책 제언 86 참고문헌 92 표 목차 그림 목차 제1장 서 론 1. 기술동향분석의 목적 및
2016년 신호등 1월호 내지(1219).indd
.indd") www.koroad.or.kr E-book 01 2016. Vol. 425 06 C o n t e n t s 58 48 18 22 04 CEO 18 2016 48! 06 22 52,, 2 08 26,! 56 KoROAD,! 14 28 58 16 32 60,?! 36, 62?, 38, 64 KoROAD?. (IBA) 4! 425 2016 1 4 1980 8 22.
www.koroad.or.kr E-book 01 2016. Vol. 425 06 C o n t e n t s 58 48 18 22 04 CEO 18 2016 48! 06 22 52,, 2 08 26,! 56 KoROAD,! 14 28 58 16 32 60,?! 36, 62?, 38, 64 KoROAD?. (IBA) 4! 425 2016 1 4 1980 8 22.
T...........hwp
 성인 미성년자 25.0% 20.0% 15.0% 10.0% 5.0% 0.0% 21.6% 22.4% 18.2% 17.5% 10.5% 6.3% 3.5% 백분율 어린이 청소년 회원 일반시민 환경지도자 초중등교사 기타 50.0% 40.0% 30.0% 20.0% 10.0% 0.0% 23.8% 45.2% 11.9% 7.2%
성인 미성년자 25.0% 20.0% 15.0% 10.0% 5.0% 0.0% 21.6% 22.4% 18.2% 17.5% 10.5% 6.3% 3.5% 백분율 어린이 청소년 회원 일반시민 환경지도자 초중등교사 기타 50.0% 40.0% 30.0% 20.0% 10.0% 0.0% 23.8% 45.2% 11.9% 7.2%
목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 목재제품의종류 국내목재산업현황 목재산업트렌드분석및미래시
 목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
1-표지 및 목차 & 1-서론 (최종보고서안).hwp
.hwp") 목차 표목차 그림목차 1 제 1 장서론 하수도시설내진기준마련을위한연구 1.1 1.2 1.3 제 1 장서론 하수도시설내진기준마련을위한연구 2 제 2 장 국내외주요지진발생현황 및피해사례조사 분석 하수도시설내진기준마련을위한연주 2.1 서론 2.2 국내지진발생현황및발생빈도 2.3 국외주요지진과하수도시설피해상황 제 2 장국내외주요지진발생현황및피해사례조사
목차 표목차 그림목차 1 제 1 장서론 하수도시설내진기준마련을위한연구 1.1 1.2 1.3 제 1 장서론 하수도시설내진기준마련을위한연구 2 제 2 장 국내외주요지진발생현황 및피해사례조사 분석 하수도시설내진기준마련을위한연주 2.1 서론 2.2 국내지진발생현황및발생빈도 2.3 국외주요지진과하수도시설피해상황 제 2 장국내외주요지진발생현황및피해사례조사
Cisco FirePOWER 호환성 가이드
 Cisco 호환성가이드 Cisco 호환성 이문서에서는 Cisco 소프트웨어와하드웨어의호환성및요건을다룹니다. 추가 릴리스또는제품정보는다음을참조하십시오. 설명서로드맵 : http://www.cisco.com/c/en/us/td/docs/security/firesight/ roadmap/firesight-roadmap.html Cisco ASA 호환성가이드 : http://www.cisco.com/c/en/us/td/docs/security/asa/compatibility/
Cisco 호환성가이드 Cisco 호환성 이문서에서는 Cisco 소프트웨어와하드웨어의호환성및요건을다룹니다. 추가 릴리스또는제품정보는다음을참조하십시오. 설명서로드맵 : http://www.cisco.com/c/en/us/td/docs/security/firesight/ roadmap/firesight-roadmap.html Cisco ASA 호환성가이드 : http://www.cisco.com/c/en/us/td/docs/security/asa/compatibility/
외국인투자유치성과평가기준개발
 2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
2010 년도연구용역보고서 외국인투자유치의성과평가기준개발 - 2010. 10. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 국립부경대학교지역사회연구소권오혁 수신 : 대한민국국회예산정책처장귀하. 2010 10 : : : : 요약문 I. 서론 1.
선진사례집(0529)
") Contents Contents 1 8 9 10 2 11 선진사례집(0529) 2012.5.29 13:30 페이지12 MAC-3 추진내용 GPS로부터 자동차의 주행 스피드를 계산하여 교통 정보 수집 일본 노무라연구소는 스마트폰형 내비게이션 서비스인 전력안내!내비 를 활용하여 2011년 일본 대지진시 도로교통 체증 피해 최소화 - 교통 체증 감소 효과 및
Contents Contents 1 8 9 10 2 11 선진사례집(0529) 2012.5.29 13:30 페이지12 MAC-3 추진내용 GPS로부터 자동차의 주행 스피드를 계산하여 교통 정보 수집 일본 노무라연구소는 스마트폰형 내비게이션 서비스인 전력안내!내비 를 활용하여 2011년 일본 대지진시 도로교통 체증 피해 최소화 - 교통 체증 감소 효과 및
중앙선복선전철화및 틸딩 (Tilting) 열차화방안
 열차화방안") 2009-016 중앙선복선전철화및 틸딩 (Tilting) 열차화방안 목 차 중앙선복선전철화및틸딩열차화방안 제 1 장 연구의배경 1 배경및목적 1 연구의배경,,, 5,,.,..,., ( ) 10,, 3,,.. . 제 2 장 철도현황및관련상위계획검토 1 철도현황 2 관련상위계획검토 철도현황및관련상위계획검토 1),.,. KTX, 1. 2). 8. 2016. A (~~)
2009-016 중앙선복선전철화및 틸딩 (Tilting) 열차화방안 목 차 중앙선복선전철화및틸딩열차화방안 제 1 장 연구의배경 1 배경및목적 1 연구의배경,,, 5,,.,..,., ( ) 10,, 3,,.. . 제 2 장 철도현황및관련상위계획검토 1 철도현황 2 관련상위계획검토 철도현황및관련상위계획검토 1),.,. KTX, 1. 2). 8. 2016. A (~~)
<B8D3B8AEB8BB5F20B8F1C2F72E687770>
 발간사 발간사 KDI 정책연구사례 : 지난 30 년의회고 발간사 KDI 정책연구사례 : 지난 30 년의회고 목차 / 김광석 / 김적교 / 사공일 / 송희연 / 남상우 / 문팔용 / 김윤형 / 사공일ㆍ송대희 / 김수곤 / 김영봉 / 이규억 / 민재성ㆍ박재용 KDI 정책연구사례 : 지난 30 년의회고 / 황인정 / 남상우 / 양수길 / 고일동 / 김준경ㆍ조동철
발간사 발간사 KDI 정책연구사례 : 지난 30 년의회고 발간사 KDI 정책연구사례 : 지난 30 년의회고 목차 / 김광석 / 김적교 / 사공일 / 송희연 / 남상우 / 문팔용 / 김윤형 / 사공일ㆍ송대희 / 김수곤 / 김영봉 / 이규억 / 민재성ㆍ박재용 KDI 정책연구사례 : 지난 30 년의회고 / 황인정 / 남상우 / 양수길 / 고일동 / 김준경ㆍ조동철
#12월-내지-최종.indd
 www..or.kr 2012. 12. December 2012. 12 1 TBN DMB 2 3 4 5 6 7 8 10.20 10.25 9 10 11 12 13 11.1 14 15 18 16 17 11.5 18 19 20 21 22 11.10 23 24 25 26 27 11.15 28 29 30 31!.,,.,. ().,,,..!,.,.,!.,,.., 2! 2.,,.
www..or.kr 2012. 12. December 2012. 12 1 TBN DMB 2 3 4 5 6 7 8 10.20 10.25 9 10 11 12 13 11.1 14 15 18 16 17 11.5 18 19 20 21 22 11.10 23 24 25 26 27 11.15 28 29 30 31!.,,.,. ().,,,..!,.,.,!.,,.., 2! 2.,,.
2016 년도국토교통기술 연구개발사업시행계획 국토교통부 국토교통과학기술진흥원
 2016 년도국토교통기술 연구개발사업시행계획 2015. 12. 국토교통부 국토교통과학기술진흥원 목차 Ⅰ. 계획수립개요 1 계획수립배경 1 계획수립대상사업 1 상위계획과연계성 2 Ⅱ. 투자현황및성과 3 투자현황 3 투자방향 5 주요성과 8 Ⅲ. 2016 년추진방향및주요내용 9 정부연구개발과국토교통 R&D 추진방향연계 9 부문별투자계획 10 R&D 시스템개선 12
2016 년도국토교통기술 연구개발사업시행계획 2015. 12. 국토교통부 국토교통과학기술진흥원 목차 Ⅰ. 계획수립개요 1 계획수립배경 1 계획수립대상사업 1 상위계획과연계성 2 Ⅱ. 투자현황및성과 3 투자현황 3 투자방향 5 주요성과 8 Ⅲ. 2016 년추진방향및주요내용 9 정부연구개발과국토교통 R&D 추진방향연계 9 부문별투자계획 10 R&D 시스템개선 12
 Ⅱ. 논리아키텍처 Ⅱ. 논리아키텍처 2.1 국가 ITS 아키텍처의기능구성 < 표 2-1> 국가 ITS 아키텍처기능구성 - 45 - < 표계속 > - 46 - < 표계속 > - 47 - < 표계속 > - 48 - < 표계속 > - 49 - < 표계속 > - 50 - < 표계속 > - 51 - < 표계속 > - 52 - < 표계속 > - 53 - < 표계속 >
Ⅱ. 논리아키텍처 Ⅱ. 논리아키텍처 2.1 국가 ITS 아키텍처의기능구성 < 표 2-1> 국가 ITS 아키텍처기능구성 - 45 - < 표계속 > - 46 - < 표계속 > - 47 - < 표계속 > - 48 - < 표계속 > - 49 - < 표계속 > - 50 - < 표계속 > - 51 - < 표계속 > - 52 - < 표계속 > - 53 - < 표계속 >
목 차 주요내용요약 1 Ⅰ. 서론 3 Ⅱ. 스마트그리드산업동향 6 1. 특징 2. 시장동향및전망 Ⅲ. 주요국별스마트그리드산업정책 17 Ⅳ. 미국의스마트그리드산업동향 스마트그리드산업구조 2. 스마트그리드가치사슬 3. 스마트그리드보급현황 Ⅴ. 미국의스마트그리드정
 2012-02 2012. 1. 13 미국스마트그리드산업의 Value Chain 및정책동향 주요내용요약 서론 스마트그리드산업동향 주요국별스마트그리드산업정책 미국의스마트그리드산업동향 미국의스마트그리드정책동향 21세기스마트그리드산업전략 결론 작성김정욱책임연구원, 미국거점 kjwcow@kiat.or,kr +1-404-477-3288 감수조영희팀장, 국제협력기획팀 yhcho@kiat.or.kr
2012-02 2012. 1. 13 미국스마트그리드산업의 Value Chain 및정책동향 주요내용요약 서론 스마트그리드산업동향 주요국별스마트그리드산업정책 미국의스마트그리드산업동향 미국의스마트그리드정책동향 21세기스마트그리드산업전략 결론 작성김정욱책임연구원, 미국거점 kjwcow@kiat.or,kr +1-404-477-3288 감수조영희팀장, 국제협력기획팀 yhcho@kiat.or.kr
?.? -? - * : (),, ( 15 ) ( 25 ) : - : ( ) ( ) kW. 2,000kW. 2,000kW 84, , , , : 1,
,, ( 15 ) ( 25 ) : - : ( ) ( ) kW. 2,000kW. 2,000kW 84, , , , : 1,") 기계 기구및설비설치또는변경시사업장안전성문제가걱정된다면? 제조업등유해 위험방지계획서로해결하세요! '14 9 13 10 13. ?.? -? - www.kosha.or.kr * : (),, ( 15 ) - 15 - ( 25 ) - 2 - : - : ( 2013-2 ) ( ) 10. 500kW. 2,000kW. 2,000kW 84,000 123,000 183,000
기계 기구및설비설치또는변경시사업장안전성문제가걱정된다면? 제조업등유해 위험방지계획서로해결하세요! '14 9 13 10 13. ?.? -? - www.kosha.or.kr * : (),, ( 15 ) - 15 - ( 25 ) - 2 - : - : ( 2013-2 ) ( ) 10. 500kW. 2,000kW. 2,000kW 84,000 123,000 183,000
TS-4월호-28일-4A.pdf
 www.ts2020.kr TS everyday LIFE 1 2015/ 390 4 TS CONTENTS What's TS What's Up 22 26 30 34 38 40 04 06 10 44 46 What's Special 14 18 What's Next 50 54 56 58 60 62 64 66 67 68 TS CEO MESSAGE 4 _ TS for you
www.ts2020.kr TS everyday LIFE 1 2015/ 390 4 TS CONTENTS What's TS What's Up 22 26 30 34 38 40 04 06 10 44 46 What's Special 14 18 What's Next 50 54 56 58 60 62 64 66 67 68 TS CEO MESSAGE 4 _ TS for you
<B0EDBCD3C3B6B5B5C3D6C1BEC0CEBCE2BABB F422DC1A42D2D2D2D2E687770>
 본연구에서는지역특성이인구이동에미치는영향을추정하기위해사회경제적자료외에한국감정원에서제공하는공시지가자료와 M = ρw( M) + Xβ + u 고속철도개통 지역간접근성개선 통행시간단축 교류가능인구증가 시장의확대 사회 / 시스템변화 유동인구증가 통행수단전환 유동인구증가 기업의입지변화 국토공간구조변화 정차역주변변화 통근권변화 일자리증가
본연구에서는지역특성이인구이동에미치는영향을추정하기위해사회경제적자료외에한국감정원에서제공하는공시지가자료와 M = ρw( M) + Xβ + u 고속철도개통 지역간접근성개선 통행시간단축 교류가능인구증가 시장의확대 사회 / 시스템변화 유동인구증가 통행수단전환 유동인구증가 기업의입지변화 국토공간구조변화 정차역주변변화 통근권변화 일자리증가
레이아웃 1
 01 2015 August vol.04 융합Weekly 발행일_ 2015.08.31 발행처_융합연구정책센터 TIP 자율주행자동차 동향과 전망 이재관 자동차부품연구원 선정 사유 (사회 이슈) 사회와 공존하는 이동성에 대한 새로운 패러다임으로의 전환과 급속한 고령화에 따른 노인 운전자를 위한 안전대책 요구 - 미래사회 이동성 키워드는 고안전, 친환경, 친인간,
01 2015 August vol.04 융합Weekly 발행일_ 2015.08.31 발행처_융합연구정책센터 TIP 자율주행자동차 동향과 전망 이재관 자동차부품연구원 선정 사유 (사회 이슈) 사회와 공존하는 이동성에 대한 새로운 패러다임으로의 전환과 급속한 고령화에 따른 노인 운전자를 위한 안전대책 요구 - 미래사회 이동성 키워드는 고안전, 친환경, 친인간,
목차 I. 자율주행자동차의개요 II. 자율주행자동차시장전망과기술수준 III. 대중교통자율주행자동차정책추진현황 IV. 자율주행자동차의교통부문영향 V. 자율주행자동차에대한소비자선호도 VI. 주요정책과제
 CNI 세미나 : 첨단교통과자율주행차시대의대응방안 자율주행자동차와국토교통분야의과제 2017-6-7 이백진 첨단인프라센터센터장 국토연구원국토인프라연구본부 목차 I. 자율주행자동차의개요 II. 자율주행자동차시장전망과기술수준 III. 대중교통자율주행자동차정책추진현황 IV. 자율주행자동차의교통부문영향 V. 자율주행자동차에대한소비자선호도 VI. 주요정책과제 I. 자율주행자동차의개요
CNI 세미나 : 첨단교통과자율주행차시대의대응방안 자율주행자동차와국토교통분야의과제 2017-6-7 이백진 첨단인프라센터센터장 국토연구원국토인프라연구본부 목차 I. 자율주행자동차의개요 II. 자율주행자동차시장전망과기술수준 III. 대중교통자율주행자동차정책추진현황 IV. 자율주행자동차의교통부문영향 V. 자율주행자동차에대한소비자선호도 VI. 주요정책과제 I. 자율주행자동차의개요
(100802)_출판보고서_경춘선 용산역 연장운행.hwp
_출판보고서_경춘선 용산역 연장운행.hwp") 2010 년도설계변경사전타당성검토보고서 경춘선용산역연장운행 2010. 6. 공공투자관리센터 한국개발연구원 제 Ⅰ 장타당성검토의개요 1. 사업추진배경및필요성,. 1) ~, 7 ( 2003-277). - 04 9 ~,., ( ())... -,,,. - 2 1.. ~ ~. (311 ), 10. 2. 사업의주요내용및추진경위 가. 경춘선복선전철화사업 () : ~ 81.4km
2010 년도설계변경사전타당성검토보고서 경춘선용산역연장운행 2010. 6. 공공투자관리센터 한국개발연구원 제 Ⅰ 장타당성검토의개요 1. 사업추진배경및필요성,. 1) ~, 7 ( 2003-277). - 04 9 ~,., ( ())... -,,,. - 2 1.. ~ ~. (311 ), 10. 2. 사업의주요내용및추진경위 가. 경춘선복선전철화사업 () : ~ 81.4km
<4D F736F F D BFEEC0FCBACEC7CF20C3F8C1A4C0BB20C0A7C7D120BFEEC0FCC0DA20C7E0B5BF20BAD0BCAE2E646F63>
 운전부하측정을위한운전자행동분석 윤대섭 황윤숙 김현숙 김경호 1 한국전자통신연구원자동차 / 조선 IT 융합연구부친환경차량 IT 연구팀 {eyetracker, hanulai403, hyskim, kkh}@etri.re.kr Driver Behavior Analysis for Driving Workload Daesub Yoon, Yoonsook Hwang, Hyunsuk
운전부하측정을위한운전자행동분석 윤대섭 황윤숙 김현숙 김경호 1 한국전자통신연구원자동차 / 조선 IT 융합연구부친환경차량 IT 연구팀 {eyetracker, hanulai403, hyskim, kkh}@etri.re.kr Driver Behavior Analysis for Driving Workload Daesub Yoon, Yoonsook Hwang, Hyunsuk
2002report hwp
 2002 연구보고서 220-11 초 중등교육과정의성인지적개편을위한양성평등교육내용개발 한국여성개발원 발간사 양성평등교육내용개발진 연구요약 1. 연구목적 2. 연구방법 3. 7 차교육과정및교과서내용분석 가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 4. 각교과별양성평등교육내용개발가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 5. 결론 목 차 Ⅰ 서론
2002 연구보고서 220-11 초 중등교육과정의성인지적개편을위한양성평등교육내용개발 한국여성개발원 발간사 양성평등교육내용개발진 연구요약 1. 연구목적 2. 연구방법 3. 7 차교육과정및교과서내용분석 가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 4. 각교과별양성평등교육내용개발가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 5. 결론 목 차 Ⅰ 서론
H3250_Wi-Fi_E.book
 무선 LAN 기능으로 할 수 있는 것 2 무선 LAN 기능으로 할 수 있는 것 z q l D w 3 Wi-Fi 기능 플로우차트 z q l D 4 Wi-Fi 기능 플로우차트 w 5 본 사용 설명서의 기호 설명 6 각 장별 목차 1 2 3 4 5 6 7 8 9 10 11 12 13 14 7 목차 1 2 3 4 8 목차 5 6 7 8 9 9 목차 10 11 12
무선 LAN 기능으로 할 수 있는 것 2 무선 LAN 기능으로 할 수 있는 것 z q l D w 3 Wi-Fi 기능 플로우차트 z q l D 4 Wi-Fi 기능 플로우차트 w 5 본 사용 설명서의 기호 설명 6 각 장별 목차 1 2 3 4 5 6 7 8 9 10 11 12 13 14 7 목차 1 2 3 4 8 목차 5 6 7 8 9 9 목차 10 11 12
목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ]
![목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ]](/thumbs/86/93192900.jpg "목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ]") 우리는소비자와함께행복한세상을만든다 건전지품질비교시험결과보고서 2012. 8 시험분석국 기계전기팀 목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ] 1. 10 2. 24 3. 25 I 시험개요 1. 시험배경및목적 - 1 - 2. 시험대상 () ( ) 1 [4 ] Zhejiang Mustang Battery
우리는소비자와함께행복한세상을만든다 건전지품질비교시험결과보고서 2012. 8 시험분석국 기계전기팀 목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ] 1. 10 2. 24 3. 25 I 시험개요 1. 시험배경및목적 - 1 - 2. 시험대상 () ( ) 1 [4 ] Zhejiang Mustang Battery
< C0DAC0B2C5BDB1B820BFEEBFB520B8DEB4BABEF32D33C2F720C6EDC1FD2E687770>
 과학영재의창의적탐구능력배양을위한 R&E 프로그램기획 운영핸드북 Handbook of Annual Planning and Implementing R&E Program for the Talented 2017 과학영재창의연구 (R&E) 지원센터 이핸드북은과학고와과학영재학교의연간 R&E 프로그램기획 운영을효과적으로지원하기위해개발된것으로, 한국과학창의재단지정과학영재창의연구
과학영재의창의적탐구능력배양을위한 R&E 프로그램기획 운영핸드북 Handbook of Annual Planning and Implementing R&E Program for the Talented 2017 과학영재창의연구 (R&E) 지원센터 이핸드북은과학고와과학영재학교의연간 R&E 프로그램기획 운영을효과적으로지원하기위해개발된것으로, 한국과학창의재단지정과학영재창의연구
제주발전연구원 제주발전연구원 정책이슈브리프 2014년 6월 2일 Vol. 191 발행처 : 제주발전연구원 발행인 : 공영민 주 소 : 690-162 제주특별자치도 제주시 아연로 253 TEL. 064-726-0500 FAX. 064-751-2168 제주발전연구원은 지역
 191 2014. 6. 2 제주지역 교통문화지수 분석 및 정책제언 제주발전연구원 손 상 훈 책임연구원 제주발전연구원 제주발전연구원 정책이슈브리프 2014년 6월 2일 Vol. 191 발행처 : 제주발전연구원 발행인 : 공영민 주 소 : 690-162 제주특별자치도 제주시 아연로 253 TEL. 064-726-0500 FAX. 064-751-2168 제주발전연구원은
191 2014. 6. 2 제주지역 교통문화지수 분석 및 정책제언 제주발전연구원 손 상 훈 책임연구원 제주발전연구원 제주발전연구원 정책이슈브리프 2014년 6월 2일 Vol. 191 발행처 : 제주발전연구원 발행인 : 공영민 주 소 : 690-162 제주특별자치도 제주시 아연로 253 TEL. 064-726-0500 FAX. 064-751-2168 제주발전연구원은
W7_Business_ 제품설계
 6가지 테마와 24단계 창업 프로그램 벤처창업 (START-UP) Week 7: 스타트업 바이블 Step 20, 21, 22, 23 ; 어떤 과정을 거쳐 제품을 기획하고 설계할까? Hansoo Kim, Ph.D YUST MIS / E-Biz Research Center / BNC ?????,!????,? (Linchpin,, )?? ),, SASA : :,,
6가지 테마와 24단계 창업 프로그램 벤처창업 (START-UP) Week 7: 스타트업 바이블 Step 20, 21, 22, 23 ; 어떤 과정을 거쳐 제품을 기획하고 설계할까? Hansoo Kim, Ph.D YUST MIS / E-Biz Research Center / BNC ?????,!????,? (Linchpin,, )?? ),, SASA : :,,
untitled
 13-28 Korea Building Expo in China 2009 www.kobuild.com NO.1 www.duckshin.com The Korea Land Daily 14-15 16 17 19 22 23 24 25 27 I CMYK 20 전 2009년 7월 16일 목요일 면 광 21 고 2009 대한민국 건설환경기술상 국토해양부
13-28 Korea Building Expo in China 2009 www.kobuild.com NO.1 www.duckshin.com The Korea Land Daily 14-15 16 17 19 22 23 24 25 27 I CMYK 20 전 2009년 7월 16일 목요일 면 광 21 고 2009 대한민국 건설환경기술상 국토해양부
보건분야 - 보고서연구원 직업성천식감시체계구축 운용 The surveillance to detect the occupational asthma in Korea 2011 년사업결과보고서 Occupational Safety and Health Research
 보건분야 - 보고서연구원 2011-- 직업성천식감시체계구축 운용 The surveillance to detect the occupational asthma in Korea 2011 년사업결과보고서 Occupational Safety and Health Research Institute 요약문 1-1 - 2 직업성천식감시체계구축운용 - 2 - 요약문 3-3 -
보건분야 - 보고서연구원 2011-- 직업성천식감시체계구축 운용 The surveillance to detect the occupational asthma in Korea 2011 년사업결과보고서 Occupational Safety and Health Research Institute 요약문 1-1 - 2 직업성천식감시체계구축운용 - 2 - 요약문 3-3 -
354-437-4..
 357 358 4.3% 5.1% 8.2% 6.2% 5.6% 6% 5% 5.3% 96.1% 85.2% 39.6% 50.8% 82.7% 86.7% 28.2% 8.0% 60.0% 60.4% 18,287 16,601 (%) 100 90 80 70 60 50 40 86.6% 80.0% 77.8% 57.6% 89.7% 78.4% 82.1% 59.0% 91.7% 91.4%
357 358 4.3% 5.1% 8.2% 6.2% 5.6% 6% 5% 5.3% 96.1% 85.2% 39.6% 50.8% 82.7% 86.7% 28.2% 8.0% 60.0% 60.4% 18,287 16,601 (%) 100 90 80 70 60 50 40 86.6% 80.0% 77.8% 57.6% 89.7% 78.4% 82.1% 59.0% 91.7% 91.4%
소준섭
 2014 년미얀마의국가경쟁력평가와정책적시사점 : 세계경쟁력지수 (GCI) 분석을통한개발협력분야모색 원순구 목 차 Ⅰ. 서론 Ⅱ. 미얀마및한국의세계경쟁력지수 (GCI) 분석 1. 세계경쟁력지수의구조및측정 2. 미얀마국가경쟁력지수평가분석 3. 한국의국가경쟁력지수분석 Ⅲ. 양국의경쟁력지수 GAP 분석을통한개발협력분야모색 1. 한국과미얀마의부문별경쟁력지수 GAP 분석
2014 년미얀마의국가경쟁력평가와정책적시사점 : 세계경쟁력지수 (GCI) 분석을통한개발협력분야모색 원순구 목 차 Ⅰ. 서론 Ⅱ. 미얀마및한국의세계경쟁력지수 (GCI) 분석 1. 세계경쟁력지수의구조및측정 2. 미얀마국가경쟁력지수평가분석 3. 한국의국가경쟁력지수분석 Ⅲ. 양국의경쟁력지수 GAP 분석을통한개발협력분야모색 1. 한국과미얀마의부문별경쟁력지수 GAP 분석
 - 1 - 목 차 1 교통사고사망자 50% 감축 5 2 사람중심의도로공간재편추진 7 3 보행환경개선지구확대 9 4 도심보행전용거리확대및운영활성화 10 5 보행불편해소를위한횡단보도확충정비 11 6 어린이교통안전프로젝트 엘로카펫 설치 12 7 2016 년공공자전거확대 구축운영 13 8 자전거안전이용문화확산 14 9 자전거인프라확충및안전시설개선 15 10 자동차소유문화변화를위한나눔카
- 1 - 목 차 1 교통사고사망자 50% 감축 5 2 사람중심의도로공간재편추진 7 3 보행환경개선지구확대 9 4 도심보행전용거리확대및운영활성화 10 5 보행불편해소를위한횡단보도확충정비 11 6 어린이교통안전프로젝트 엘로카펫 설치 12 7 2016 년공공자전거확대 구축운영 13 8 자전거안전이용문화확산 14 9 자전거인프라확충및안전시설개선 15 10 자동차소유문화변화를위한나눔카
<C3E6B3B2B1B3C0B0313832C8A32DC5BEC0E7BFEB28C0DBB0D4292D332E706466>
 11-8140242-000001-08 2013-927 2013 182 2013 182 Contents 02 16 08 10 12 18 53 25 32 63 Summer 2 0 1 3 68 40 51 57 65 72 81 90 97 103 109 94 116 123 130 140 144 148 118 154 158 163 1 2 3 4 5 8 SUMMER
11-8140242-000001-08 2013-927 2013 182 2013 182 Contents 02 16 08 10 12 18 53 25 32 63 Summer 2 0 1 3 68 40 51 57 65 72 81 90 97 103 109 94 116 123 130 140 144 148 118 154 158 163 1 2 3 4 5 8 SUMMER
나 ) 지역사유서 도면표시번호 - 위치 민락동 일원 준주거지역 지역 일반상업지역 면적 ( m2 ) (%) 57,742 1,000 사유 2020 년부산도시관리계획 ( 재정비 ) 지역 ( 준주거지역 일반상업지역,57,742 m2 ) ( 부고제 94 호, 201
 지역사유서 도면표시번호 - 위치 민락동 일원 준주거지역 지역 일반상업지역 면적 ( m2 ) (%) 57,742 1,000 사유 2020 년부산도시관리계획 ( 재정비 ) 지역 ( 준주거지역 일반상업지역,57,742 m2 ) ( 부고제 94 호, 201") 부산광역시고시제 2017-206 호 광안리해수욕장주변지구단위계획결정 ( ) 및지형도면고시 1. 부산광역시고시제2007-67호 (2007.2.7.) 로도시관리계획 ( 지구단위계획구역및지구단위계획 ) 결정및지형도면고시된광안리해수욕장주변지구단위계획에대하여 국토의계획및이용에관한법률 제 30조, 제32조및같은법시행령제 25조, 토지이용규제기본법 제8조제2항의규정에따라지구단위계획결정
부산광역시고시제 2017-206 호 광안리해수욕장주변지구단위계획결정 ( ) 및지형도면고시 1. 부산광역시고시제2007-67호 (2007.2.7.) 로도시관리계획 ( 지구단위계획구역및지구단위계획 ) 결정및지형도면고시된광안리해수욕장주변지구단위계획에대하여 국토의계획및이용에관한법률 제 30조, 제32조및같은법시행령제 25조, 토지이용규제기본법 제8조제2항의규정에따라지구단위계획결정
( 1 ) ( 2 )
 ( 2 )") 보건의료기술육성기본계획 ( 13 17) 2016 년시행계획 ( 안 ) ( 1 ) ( 2 ) 0 비전중장기 5대추진전략 국민건강 G7 선진국도약 - 2020 건강수명 75 세시대 달성 - 건강 R&D 투자지속적확대 글로벌수준의기술개발을위한선택과집중 성과창출형 R&D 지원시스템고도화 연구생태계조성 건강산업촉진을위한제도개선 건강 R&D 투자지속적확대 보건의료 R&D
보건의료기술육성기본계획 ( 13 17) 2016 년시행계획 ( 안 ) ( 1 ) ( 2 ) 0 비전중장기 5대추진전략 국민건강 G7 선진국도약 - 2020 건강수명 75 세시대 달성 - 건강 R&D 투자지속적확대 글로벌수준의기술개발을위한선택과집중 성과창출형 R&D 지원시스템고도화 연구생태계조성 건강산업촉진을위한제도개선 건강 R&D 투자지속적확대 보건의료 R&D
ad-200200004.hwp
 탈성매매를 위한 사회복귀지원 프로그램 연구 여 성 부 목 차 Ⅰ. 서론 Ⅱ. 이론적 배경 및 선행연구결과 정리 Ⅲ. 여성복지상담소 실태조사 결과 Ⅳ. 선도보호시설의 운영 및 프로그램 현황 조사 결과 Ⅴ. 결론 참고문헌 부 록 표 목 차 그 림 목 차 부 표 목 차 Ⅰ. 서 론 . 서론 1. 연구의 목적 및 필요성 탈성매매를 위한 사회복귀지원 프로그램 연구
탈성매매를 위한 사회복귀지원 프로그램 연구 여 성 부 목 차 Ⅰ. 서론 Ⅱ. 이론적 배경 및 선행연구결과 정리 Ⅲ. 여성복지상담소 실태조사 결과 Ⅳ. 선도보호시설의 운영 및 프로그램 현황 조사 결과 Ⅴ. 결론 참고문헌 부 록 표 목 차 그 림 목 차 부 표 목 차 Ⅰ. 서 론 . 서론 1. 연구의 목적 및 필요성 탈성매매를 위한 사회복귀지원 프로그램 연구
Slide 1
 Java 기반의오픈소스 GIS(GeoServer, udig) 를지원하는국내공간 DBMS 드라이버의개발 2013. 08. 28. 김기웅 (socoooooool@gmail.com) 임영현 (yhlim0129@gmail.com) 이민파 (mapplus@gmail.com) PAGE 1 1 기술개발의목표및내용 2 기술개발현황 3 커뮤니티운영계획 4 활용방법및시연 PAGE
Java 기반의오픈소스 GIS(GeoServer, udig) 를지원하는국내공간 DBMS 드라이버의개발 2013. 08. 28. 김기웅 (socoooooool@gmail.com) 임영현 (yhlim0129@gmail.com) 이민파 (mapplus@gmail.com) PAGE 1 1 기술개발의목표및내용 2 기술개발현황 3 커뮤니티운영계획 4 활용방법및시연 PAGE
국가건설기준 설계기준 Korean Design Standard KDS : 2016 쌓기 깎기설계기준 2016 년 6 월 30 일제정
 국가건설기준 설계기준 Korean Design Standard KDS 11 70 05 : 2016 쌓기 깎기설계기준 2016 년 6 월 30 일제정 http://www.kcsc.re.kr 건설기준제 개정에따른경과조치 이기준은발간시점부터사용하며, 이미시행중에있는설계용역이나건설공 사는발주기관의장이필요하다고인정하는경우종전에적용하고있는기준 을그대로사용할수있습니다.
국가건설기준 설계기준 Korean Design Standard KDS 11 70 05 : 2016 쌓기 깎기설계기준 2016 년 6 월 30 일제정 http://www.kcsc.re.kr 건설기준제 개정에따른경과조치 이기준은발간시점부터사용하며, 이미시행중에있는설계용역이나건설공 사는발주기관의장이필요하다고인정하는경우종전에적용하고있는기준 을그대로사용할수있습니다.
2013여름시론(3-5)
") 2013 Vol.7 No.3 & CONTENTS 04 06 10 20 26 32 38 44 52 56 62 68 74 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 特 輯 특집Ⅱ 특정 전문직 종사자의 안전보건 이슈 특집Ⅱ 10) 11) 운송산업 근로자들을 대상으로 한 일부 연구는 디젤연소 한 56세 근로자로서
2013 Vol.7 No.3 & CONTENTS 04 06 10 20 26 32 38 44 52 56 62 68 74 04 05 06 07 08 09 10 11 12 13 14 15 16 17 18 19 20 21 特 輯 특집Ⅱ 특정 전문직 종사자의 안전보건 이슈 특집Ⅱ 10) 11) 운송산업 근로자들을 대상으로 한 일부 연구는 디젤연소 한 56세 근로자로서
오토 2, 3월호 내지최종
 Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
02본본:02본본 본본 3:25 Page 특집 자율주행차 5G 도입 및 자율주행 현황 홍승표, 김경훈 / SK텔레콤 1. 5G 개요 요약 5G는 지난 12월 시범서비스, 올해 상반기 상용서비스를 앞두 고 있으며, 차량통신 및 자율주행이 주
 02본본:02본본 19. 2. 20. 본본 3:25 Page 33 33 특집 자율주행차 5G 도입 및 자율주행 현황 홍승표, 김경훈 / SK텔레콤 1. 5G 개요 요약 5G는 지난 12월 시범서비스, 올해 상반기 상용서비스를 앞두 고 있으며, 차량통신 및 자율주행이 주요한 5G 적용 분야의 하나로 두고 있다. 자율주행으로 대표되는 차량통신 및 5G 분야 기술요소와
02본본:02본본 19. 2. 20. 본본 3:25 Page 33 33 특집 자율주행차 5G 도입 및 자율주행 현황 홍승표, 김경훈 / SK텔레콤 1. 5G 개요 요약 5G는 지난 12월 시범서비스, 올해 상반기 상용서비스를 앞두 고 있으며, 차량통신 및 자율주행이 주요한 5G 적용 분야의 하나로 두고 있다. 자율주행으로 대표되는 차량통신 및 5G 분야 기술요소와
전기차보급활성화포럼 전기차보급정책방향ㅣ 211
 전기차보급정책방향 에너지관리공단부장 l 박성우 전기차보급활성화포럼 전기차보급정책방향ㅣ 211 전기차보급활성화포럼 212 ㅣ 전기차보급정책방향ㅣ 213 전기차보급활성화포럼 214 ㅣ 전기차보급정책방향ㅣ 215 전기차보급활성화포럼 216 ㅣ 전기차보급정책방향ㅣ 217 전기차보급활성화포럼 218 ㅣ 전기차보급정책방향ㅣ 219 전기차보급활성화포럼 220 ㅣ 전기차보급정책방향ㅣ
전기차보급정책방향 에너지관리공단부장 l 박성우 전기차보급활성화포럼 전기차보급정책방향ㅣ 211 전기차보급활성화포럼 212 ㅣ 전기차보급정책방향ㅣ 213 전기차보급활성화포럼 214 ㅣ 전기차보급정책방향ㅣ 215 전기차보급활성화포럼 216 ㅣ 전기차보급정책방향ㅣ 217 전기차보급활성화포럼 218 ㅣ 전기차보급정책방향ㅣ 219 전기차보급활성화포럼 220 ㅣ 전기차보급정책방향ㅣ
특집2 사고 없는 교통체계(Safe Mobility) 표1 안전교통의 구성요소 구분 교통이용자 교통수단 교통시설 교통운영관리 안전교통 연구 분야는 크게 교통이용자 안전문화 개 선, 교통수단 및 교통환경 제공, 교통운 영관리 구현을 들 수 있다. 먼저 교통이용자의 교통안
 표1 안전교통의 구성요소 구분 교통이용자 교통수단 교통시설 교통운영관리 안전교통 연구 분야는 크게 교통이용자 안전문화 개 선, 교통수단 및 교통환경 제공, 교통운 영관리 구현을 들 수 있다. 먼저 교통이용자의 교통안") Special Edition _ 지속가능하고 교통물류 기술 개발을 위한 전략과 과제 지속가능하고 교통물류 기술 개발을 위한 전략과 과제 사고 없는 교통체계(Safe Mobility) Theme 02 들어가며 최근 국민이 체감하고, 국민의 요구에 대응할 수 있는 교통물류연구사업의 필요성 이 대두됨에 따라 교통물류 R&D 5대 분야 로드맵 수립 기획 이 추진되었다.
Special Edition _ 지속가능하고 교통물류 기술 개발을 위한 전략과 과제 지속가능하고 교통물류 기술 개발을 위한 전략과 과제 사고 없는 교통체계(Safe Mobility) Theme 02 들어가며 최근 국민이 체감하고, 국민의 요구에 대응할 수 있는 교통물류연구사업의 필요성 이 대두됨에 따라 교통물류 R&D 5대 분야 로드맵 수립 기획 이 추진되었다.
농업기반정비사업 계획설계기준 개편
 발간등록번호 11-1543000-000714-01 http://rri.ekr.or.kr Reforms of Code Structure for the Agricultural Infrastructure Design Standards (Ⅰ) - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - -
발간등록번호 11-1543000-000714-01 http://rri.ekr.or.kr Reforms of Code Structure for the Agricultural Infrastructure Design Standards (Ⅰ) - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - -