Microsoft Word doc
|
|
|
- 세홍 운
- 5 years ago
- Views:
Transcription
1
2 工學博士學位論文 라인스캔카메라와대구경렌즈를이용한모아레 3 차원정밀측정 3D precision measurement of scanning Moiré using line scan camera and large aperture lens 2008 年 8 月 仁荷大學校大學院 自動化工學科 尹斗炫 1
3 工學博士學位論文 라인스캔카메라와대구경렌즈를이용한모아레 3 차원정밀측정 3D precision measurement of scanning Moiré using line scan camera and large aperture lens 2008 年 8 月 指導敎授金學一 이論文을博士學位論文으로提出함 仁荷大學校大學院 自動化工學科 尹斗炫 2
4 이論文을尹斗炫의博士學位論文으로認定함 年 8 月 主審 印 副審 印 委員 印 委員 印 委員 印 3
5 요약 본논문에서는 Projection Moiré 방법을사용하여측정영역이넓은대상물체 를단시간내에신뢰성높게 3 차원측정할수있는 3 가지방안을제안한다. Projection Moiré 방법에있어서최초로라인스캔카메라를사용하여기존의면적카메라를이용하던영상획득방식에비해대면적의대상물을빠른시간내에 3차원측정할수있는방법을제안한다. 영사계에수렴광학계를사용하여대상물의표면굴곡으로인한측정정밀도저하를개선하는방법을제안한다. 라인스캔카메라를 3차원측정에사용함에있어서필수적인위치반복성이높은테이블이동장치를제안한다. 라인스캔카메라를통해모든영역의영상을획득하게되면기존의면적카메라를이용했던방법에비해투영격자의이동횟수를획기적으로줄일수있으며, 그로인해측정시간이매우빠르고측정정밀도도뛰어난장점을가진다. 본논문의스캐닝모아레측정법은넓은영역의 3차원형상정보를얻는데매우유익하며, 대면적의대상물측정시일반적으로사용하는 Stitching기법을사용할필요가없으므로한번에전영역의 3차원형상의복원이가능하여보다빠른속도로 3차원형상정보를얻을수있는효과가있다. 또한투영격자하나만을 i
6 이용한영사식모아레방식을이용하여작은높이단차를갖는물체의 3차원형상을복원하고그높이를용이하게측정할수있다. 본연구는양산환경 (Mass production) 의웨이퍼범프높이검사및패키지서브스트레이트의한종류인 FC-CSP나 FC-BGA 범프높이검사등에활용할수있다. 수렴광학계를적용하면 3차원형상측정에서보다나은품질의 raw영상 /phase영상을획득하기할수있다. 대구경렌즈를사용했을경우, 소구경렌즈를사용한경우에비해영상의밝기가밝아지고, 외각의어두운부분이없어지며, 대상물의표면굴곡으로인해어두워지는현상이사라지는효과를볼수있다. 하지만실제적으로대구경렌즈는가격이비싸기때문에쉽게적용할수없는실정이다. 이에오목거울을사용하여대구경렌즈를사용하는것과동일한효과를얻고자한다. 본연구에서는오목거울을사용함으로써, 영상획득을위한광량을최대한확보하고제품표면의윤곽에따른음영을제거함을확인하였다. 또한소구경렌즈에오목거울을포함함으로써별도의대구경렌즈를구입할필요가없어추가비용이소요되지않는장점이있다. 마지막연구는모아레측정장비의테이블이동장치의구성에관한것이다. 라인스캔카메라를이용한 3차원측정에있어서마이크론정밀도의측정을구현하기위해서는적어도 500 nm 이하의높이반복정밀도가보장되어야신뢰할수있는측정이가능해진다. 따라서라인스캔카메라를이용한 3차원측정이가능하기위해서는필수불가결한사항이된다. 이장치는다수의에어베이링을설치하여지속적으로공급되는공기에의해마찰력을제거시키는역할을한다. 일정간격을이격시키는에어베어링을통해이동테이블의이동시 X, Y, Z축으로 ii
7 의오차변위를최소화시킬수있어영상획득시측정대상물의위치반복성을향상시켜라인스캔카메라로 Moiré 무늬를측정하는것을가능하게한다. 본논문에서는라인스캔카메라를이용하여투영격자를고정시킨상태에서수렴광학계와테이블이동장치를사용하여모든측정영역의영상을획득한후투영격자를이송시키는방식을적용하였다. 이방법은측정영역에관계없이측정이완료될때까지투영격자를단지 3회만이송시킨다. 그로인해기존의모아레측정법에비해투영격자를이송시키는횟수를줄여측정시간및측정정밀도의효율성을보였다. 본논문은세계최초로라인스캔카메라와대구경렌즈를이용하여고속 Projection Moiré 측정방법을제안함으로써기존의모아레방식에서는격면반사로측정이불가능하던대상물의측정이가능하게되었고, 그연구결과는 Wafer, PCB, LCD glass등大면적대상물의 3차원양산검사기술개발에활용될수있을것으로기대된다. iii
8 Abstract This thesis presents a Projection Moiré method using a line scan camera. High resolution feature of a line scan camera makes it possible to scan an image quickly, thus enabling a much quicker 3D profile. In this thesis, three different methods are presented as indicated below. The first method - as far as we know used for the first time - is using a high resolution line scan camera making it possible to scan an image at high speed simultaneously measuring the 3D profile of a large FOV. The second method is using a convergent projection imaging system making it possible to enhance reflection uniformity on the object surface. The third method is using a high-repeatability moving table making it possible to scan a fringe image quicker than with a line scan camera. When using a high resolution scan camera, a full FOV is scanned thus requiring just 1- movement of a projection grating. As a result, the number of grating movements is reduced drastically. The end result is a faster and more accurate 3D measurement. Moving the grating too quickly causes vibration in the imaging system, which will normally be required to apply a stitching technique when using an area scan camera. However the technique is not required when using a line scan camera. Compared with the iv
9 previous techniques, it has the advantages of simple hardware without moving mechanical parts - single exposure for obtaining three-dimensional information. A method using a high resolution line scan camera can be used in mass production to measure the bump height of wafer or package substrate. Another method using a convergent projection imaging system makes it possible to enhance the reflection uniformity on the object surface. The result is an increase of SNR(Signal to Noise Ratio). Using a large aperture lens, makes it possible to obtain a brighter image, reduces the shading nature in the image boundary, and enhances the reflection uniformity even on woven surfaces. Because of the exorbitant cost of a large aperture projection lens larger than 150mm in diameter, a refractive lens was exchanged with a concave mirror resulting in the same optical effect. Incidentally, the effect of the concave mirror was tested successfully through experiment. In 3-D measurement, to achieve micro-order precision, a height repeatability of at least 500 nano meters is required. A high repeatability moving table makes it possible to scan fringe images faster than with line scan camera. This moving table is equipped with a number of air bearings. Stability is achieved through compressed air generating an air film on the surface of the air bearing. This air film eliminates surface friction of the air bearing; as a result the position repeatability of the moving table is guaranteed in the order of 50 nm. In conclusion, a high repeatability moving table is absolutely necessary in the Projection Moiré method using a line scan camera. v
10 목차 요약... I ABSTRACT... IV 목차... VI 표목차... VIII 그림목차... IX 제1장서론 연구배경 연구목적및방법 논문의구성... 7 제 2 장오목거울을이용한 3 차원영상획득 기존의영상획득방법 오목거울을이용한 3차원영상획득시스템설계 오목거울을이용한 3차원영상획득 실험및고찰 제 3 장스캐닝모아레측정방법 모아레현상 차원복원기술 기존의모아레측정방법 Moiré의원리 vi
11 3.4.1 Shadow Moiré의원리 Projection Moiré의원리 모아레무늬의기하학적해석 모아레무늬의해석 (Phase-Shifting technique) 라인스캔모아레측정장치의설계 라인스캔모아레측정 측정방법의비교 실험및고찰 제 4 장모아레측정장비의설계 개요 테이블이동장치의적용 테이블이동장치의설계 제 5 장시스템통합및성능평가 개요 실험및고찰 제 6 장결론 참고문헌 vii
12 표목차 표 2.1 광량향상과진폭차이의노이즈변화 표 3.1 기존모아레방법과의비교 표 3.2 라인스캔카메라의장점 표 3.3 동축모아레측정방법의장점 표 3.4 라인스캔카메라의스펙 표 3.5 영사계에사용된광학부품사양 표 3.6 기존의모아레기법적용데이터 표 3.7 제안한모아레기법적용데이터 표 3.8 기존의방법과제안한방법의측정시간비교 표 3.9 검사항목 표 3.10 테스트조건 표 4.1 THK LM 가이드액츄에이터 KR형의정밀도사양 표 5.1 실험에사용한광학현미경 표 5.2 테스트조건 표 5.3 반복성테스트의평균및표준편차결과 viii
13 그림목차 그림 2.1 Numerical aperture의정의...11 그림 2.2. Numerical aperture에따른입사각의변화 그림 2.3 기존의영상획득장치구성도 그림 2.4 오목거울을사용한구조 그림 2.5 오목거울을이용한 3차원영상획득방법의추가예... 19, 20 그림 2.6 제안한방법에적용된오목거울의광경로 그림 2.7 제안한방법에적용된오목거울의광경로 그림 2.8 NA와표면굴곡의관계 그림 2.9 대구경렌즈와소구경렌즈의비교... 25, 26 그림 2.10 NA값에따른굴곡부위의가시성... 28, 29 그림 2.11 NA값에따른굴곡부위의가시성변화 그림 2.12 테스트결과 Raw영상 Profile 비교... 31, 32 그림 3.1 모아레무늬가나타난영상 그림 3.2 3차원복원기술의분류 그림 3.3 센싱방법에따른광학식 3차원복원기술분류 그림 3.4 Shadow Moiré geometry 그림 3.5 Projection Moiré system 그림 3.6 Intensity distribution of a fringe pattern 그림 3.7 모아레간섭무늬의예 그림 3.8 모아레무늬획득방법 그림 3.9 라인스캔모아레측정방법의순서도 그림 3.10 대상물체의확대 그림 3.11 대상물체의모아레무늬획득 그림 3.12 모아레무늬획득장치의제어블록도 그림 3.13 성능평가의비교 그림 3.14 라인스캔카메라를이용한결과 ix
14 그림 3.15 스캐닝모아레측정법을통해얻어진 3차원 Glass 영상 그림 3.16 측정의예 그림 3.17 일반적인모아레법과스캐닝모아레의성능비교 그림 4.1 THK LM 가이드액츄에이터 KR형의구조 그림 4.2 Air bearing의동작구조 그림 4.3 공기베어링이사용된테이블이동장치 그림 4.4 제안하는모아레측정장치의테이블이동장치 그림 4.5 테이블이동장치의정면 그림 4.6 테이블이동장치의측면 그림 4.7 테이블이동장치의에어베어링 그림 4.8 테이블이동장치의이동구간에따른속도제어그래프 그림 4.9 테이블이동장치의설치에따른실시예 그림 5.1 통합시스템구성도 그림 5.2 광학현미경을이용한 Coining 제품의영상 그림 5.3 광학현미경을이용한 Non-coining 제품의영상 그림 5.4 광학현미경으로찍은 2차원영상 그림 5.5 광학현미경을이용해측정한 Bump의높이 그림 5.6 Coining 제품의결과영상 그림 5.7 Non-coining 제품의결과영상 그림 5.8 Coining 제품의 Profile 그림 5.9 Non-coining 제품의 Profile 그림 차원 Wafer 영상측정결과 그림 차원 Wafer 확대영상 그림 5.12 통합시스템의반복성결과 x
15 제 1 장서론 1.1 연구배경 디지털산업의발전과더불어반도체, PCB 등의산업규모가커짐에따라 3 차원측정기술에대한수요는지속적으로증가하고있다. 그동안생산현장에서제품의품질검사또는조립라인에서의불량품검출등에사용되던 3차원측정기술은단지공학분야에만국한되지않고바이오, 의학, 영화등의산업으로한층더우리생활과밀접한분야로확장되고있다 [1]. 3차원측정기술은정밀화, 고속화, 비접촉화로발전하고있는데, 최근에는광삼각법 (Optical triangulation), 공초점방법 (Confocal), 백색광간섭계 (White Light Scanning Interferometry), Moire법이주류를이루고있다 [2, 3]. 반도체나 Display 매체산업에사용되는 3차원측정기술은대면적, 고속도, 고분해능을선호하는경향이있는데, 양산환경 (Mass production) 에부합할만한성능의 3차원측정기술이나와있지않은상황이므로대면적 / 고속 / 고품질의 3차원기술이개발된다면이와같은첨단산업의발전에많은기여를할수있을것이다. 3차원측정은많은경우측정대상물의성분, 색상, 표면반사도, 조도등의특성으로인해측정의어려움이발생한다. 3차원측정기술을양산환경에적용하는데에는 2가지의문제점이있다. 첫째로대상물의표면반사도와표면굴곡에의해오차가증가하거나측정불가능한영역이존재한다. 둘째로 3차원측정 1
16 시간이그전후의다른공정검사 (2차원검사나전기검사 ) 에비해많이걸린다반도체분야에서필요한 3차원측정기술은납이나금으로만든구형의 Bump와실리콘기판의단차를측정하는데에주로사용되는데, Bump는금속재질과표면굴곡때문에표면에서격면반사 (Specular reflection) 가발생하여측정이어렵거나불가능한영역이존재하여측정신뢰성을떨어뜨리게된다 [4~6]. 초기생산공정에서는 Bump의높이프로파일을측정하려는요구가주류였다. 그러나대상물의특성때문에높이프로파일측정이불가능하다는것이일반적인평가이므로, 현재는 Bump의평균높이를측정하는것으로만족하고있다. 3차원측정기술의측정속도는현재까지시장에나와있는기술들중에 Laser triangulation 방법을제외하고는측정시간이양산환경의기대치에부응하지못하기때문에양산환경에적용이어려운것이현실이다. 모아레는스캔한영상에나타나는헤링본무늬, 점무늬, 바둑판무늬등을통칭하는용어이다. 카메라로영상을촬영했을때사람의시각으로보이는것과동일한사진을촬영하는것은매우어려운일이며, 그원인으로는기기의결함, 렌즈의문제, 영상주변부가어둡게나타나는비네팅현상등이있을것이다. 또한, 두개이상의주기적인물결무늬가겹쳐서생기는간섭무늬 (Interference fringe) 가생길수있으며이를모아레현상이라고한다. 현재에도모아레현상을이용한미세한물체의움직임관찰이나의료용사진촬영등에서사용되면서다양한분야에서매우광범위하게사용되고있다 [7]. 모아레측정방법은일반적으로자유곡면형태의 3차원형상을측정하는기술로써, 3차원측정기를사용하여접촉식으로곡면상의한점씩측정하여전체 2
17 곡면형상을측정하는방식이다 [8]. 그러나, 이러한방식은측정시간이길다는단점을가지고있다. 기존의모아레방법으로 3차원측정기에서얻어진영상은측정대상물의높이정보를나타내는모아레무늬와카메라앞에놓여있는기준격자의무늬가동시에나타나기때문에기준격자의영상을제거하기위한별도의수단이필요하게되어구성이복잡해지게된다는문제점이있다. 초기에는기준격자의영상을제거하기위하여 FFT등의변환을사용하였다. 또한, 기준격자와영사격자를동시에이동시키며 Time-Integral을수행하여기준격자를제거하는방법이연구되었으나 [9] 격자의이동시이동축의정밀도문제가있기때문에마이크론급의정밀측정에는적합하지않았다. 그이후현재산업계에주로사용되는방식으로기준격자가나타나지않고단지위상만측정되는방법이고안되었는데, 기준격자없이영사격자만사용하고 Phase-Shifting기법을사용하여위상만을측정하기때문에시스템의간편화및정밀도구현이가능하였다 [10, 11]. 3
18 1.2 연구목적및방법 이제까지의모아레측정방법들은측정을위해측정장치와대상물체를상대운동없이배치시킨상태에서측정을하기때문에많은갯수의또는 FOV를넘어서는넓은면적의대상물을측정하기위해서는이동 / 정지를반복해야한다. 이럴경우측정시간과이동및안정화시간이증가하게되므로총측정시간에낭비요소가많으며격자를이동시키는미세구동축의피로가누적되어수명이단축되는단점이있다. 또한대상물체의표면반사도가높을경우특정위치에격면반사가발생하여측정이불가능해지는영역이발생하게되므로측정신뢰도를떨어뜨리는요소가되고있다. 본논문에서는이러한두가지한계점을극복하기위해라인스캔카메라와대구경오목거울을사용을제한하였고, 라인스캔카메라를사용함에있어대상물과모아레측정시스템의상대운동은고정도의반복성을유지하며영상을획득할수있는고정도의테이블이송장치를제안하였다. 1) 오목거울을이용한 3차원영상획득방법오목거울을이용한 3차원영상획득방법에서대구경오목거울을사용함으로써 3차원검사시영사계에서제품표면에결상될때빛이수렴광이되도록하면제품표면의굴곡에따른음영의완화및광량확보등을통해보다나은품질의 raw영상및 Phase영상을획득할수있다. 투영광학계를사용하여수렴광을만들려면 FOV보다수배의크기를갖는렌즈가필요한데, 이러한대구경렌즈를사용하지않고, 소구경렌즈에오목거울을적용함으로써, 대구경렌즈를 4
19 사용했을때와동일한결과를얻어내고자하였다. 가격이비싸적용하기어려운 대구경렌즈를대신해소구경렌즈로도같은효과를얻어비용절감의효과를 얻었다. 2) 스캐닝모아레측정방법스캐닝모아레측정방법은라인스캔카메라를통해모든영역의영상을획득하고기존의모아레측정방법에비해투영격자의이동횟수를획기적으로줄여측정시간및정밀도를향상시키는데그목적을두고있다. 기존의연구들은한위치에서다수의영상을받아측정을완료한후위치를이동하여다시다수의영상을받아측정하는방식이었으며, 대상물체의각위치마다투영격자를이동시킴에따른진동이영상을왜곡시켜정밀도를저하시키는경우가있었다. 그러나, 본논문에서는이동하면서연속적인영상을획득함으로써측정시간과성능을향상시키고자하였다. 3) 모아레측정장비의설계본연구에사용된테이블이동장치는다수의에어베이링을설치하여지속적으로공급되는공기에의해마찰력을제거시키는역할을한다. 일정간격을이격시키는에어베어링을통해이동테이블의이동시축 (x, y, z) 으로의오차변위를최소화시킬수있어작업의효율성을향상시킬수있게하는장점을가지고있다. 본논문에서는기존의면적카메라를이용한모아레측정방법을개선하여 5
20 새로운라인스캔카메라를적용한모아레측정방법을제안하였다. 소구경렌 즈로대구경렌즈와동일한성능을내는오목거울을이용한 3 차원영상획득 방법도제안하였으며, 전체적인성능이향상되도록제안하였다. 6
21 1.3 논문의구성 본논문의 제 2장오목거울을이용한 3차원영상획득방법 은영상획득방법에대해소개한다. 제안하는오목거울을사용한영상획득방법은소구경렌즈를사용했을시에도대구경렌즈를사용한것과동일한효과를낼수있도록구성하였으며, 성능평가를위해대구경렌즈와소구경렌즈를비교하였고, 오목거울의사용유무에따른결과를분석하였다. 제 3장스캐닝모아레측정방법 에서는본장에서다루고자하는연구의기초가되는내용으로간단한정의와일반적인내용을담고있으며, 기존의모아레방법의특성및문제점을서술하며, 실험을통해제안하는스캐닝모아레방법과비교하여성능차이를비교하였다. 또한, 제안하는방법에대한구성등을통해스캐닝모아레측정장치에대해소개하였다. 제 4장모아레측정장비의테이블이동장치 에대한연구에서는다수의에어베어링을이용하여기존의방법보다이동시흔들림이최소화되어대상물의오차범위를최소화시킬수있어작업의효율성을향상시킬수있는방법에대해설명하였다. 제 5장시스템통합및성능평가 에서는앞장에서설명한연구들을하나의시스템을통해얻어진성능의결과를보여준다. 먼저시스템의구성도를통해위에서설명한연구방법들을소개하였고, 시스템을통해제품에대한 3차원영상측정결과와높이측정의실험결과를보여준다. 제 6장결론 에서는위에서제시한오목거울을이용한 3차원영상획득 7
22 방법, 스캐닝모아레측정방법, 모아레획득장치의이동테이블장치, 그리고 통합된시스템에대한결과를정리하였고, 본연구에서제안하는방법의우수함 을설명하였다. 8
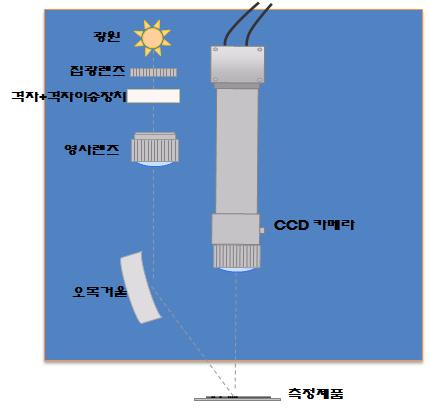
23 제 2 장오목거울을이용한 3 차원영상획득 본장에서는오목거울을이용한 3차원영상획득방법을제안한다. 오목거울은빛을반사하는면이오목한거울로써, 가까운거리에있는물체를볼때물체와모양은같고크게보이는것이특징이다. 보통의경우, 작은것을크게보거나빛을모으는데이용한다. 빛을모아서더밝게볼수있으므로반사경으로많이이용하고있으며, 본연구에서도오목거울의이러한점을이용하여오목거울을이용한 3차원영상획득방법을제안하였다. 3차원영상획득장치는광을출사하는광원, 광원으로부터출사된광을집광하기위한집광렌즈, 집광렌즈를통해집광되어입사되는광을투과시키는격자, 격자로부터의출사광을평행광으로출사하는영사렌즈, 영사렌즈의평행광을반사시켜전량의광을측정제품쪽으로출사하는오목거울그리고측정제품으로부터반사된반사광을획득하는 CCD카메라로구성되어있다. 그림 2.1은현미경의대물렌즈에서빛이출사되어관찰대상물로전달되는구조를나타낸그림이다. 현미경에서는배율을증가시킴에따라관찰대상물로부터반사되어나오는빛의양이배율의제곱에비례하여줄어들기때문에배율의변화에따라다량의빛이관찰대상물로조사되도록하기위해서 NA(Numerical aperture) 를크게하여관찰이용이한구조로되어있다. NA(Numerical aperture) n sin (2.1) 9
24 NA 는식 (2.1) 과같이정의되고, n 은빛이대물렌즈로부터대물렌즈와관찰 대상물사이에존재하는매질로입사될때의굴절률이다. 공기중에서의 n 값은 1.0으로근사할수있고, µ 의최대값은 90도로한정된다. NA가증가함에따라대상물체로입사되는각도의범위가넓어지면대상물체로입사되는빛의양이많아져서대상물체가밝아지는현상이발생한다. 동시에대상물체로입사되는빛의입사각도가커지는효과가동반되므로낮은 NA의광학계에서는어둡게보이던굴곡부분이높은 NA의광학계에서는밝게보이는효과가유발된다. NA값의변화에따른가시성에대한측면에서볼때, 관찰대상물의표면굴곡에의한기울기를 θ( 광축에수직한면기준 ) 라고했을때 (2.2) 인관계에있는표면의굴곡은표면에서정반사가발생하여대물렌즈로재입사되는빛의경로가존재하므로가시성이확보된다. 표면의반사도가높지않은대상물의경우에는대상물체의표면에서물체반사가발생하므로, 재입사되는빛의경로가확보되지않아도표면의관찰이일정수준가능하지만, 표면반사도가높아서격면반사 (Specular reflection) 를하는대상물체의경우재입사되는빛의경로가확보되지않으면표면이어둡게만보일뿐표면관찰이불가능해진다. 이렇게 NA값이큰조사광학계를구현하면관찰대상물의표면굴곡에의해어둡게보여서노이즈가증가하거나관찰이불가능한대상물도관찰이가능 10

25 하게하는효과를유발할수있다. 그림 2.2는 NA값에따른빛의입사각도의예시를나타내었다. 본장에서는먼저, 2.1절에서기존의 3차원영상획득방법에대해설명하고, 2.2절과 2.3절에서는제안하는 3차원영상획득방법의특징및구성에대해설명한다. 그리고, 2.4절의실험에서는대구경렌즈와소구경렌즈의결과영상의비교와오목거울사용유무에따른실험결과를제시하고자한다. 그림 2.1 Numerical aperture 의정의 11
 μ=20, NA=0.34 and (c) μ=60 NA=0.")
26 그림 2.2 Numerical aperture 에따른입사각의변화, (a) μ=7, NA=0.12, (b) μ=20, NA=0.34 and (c) μ=60 NA=
27 2.1 기존의영상획득방법 일반적으로영상획득장치는고체촬상소자를이용하여대상물체의영상을획득하는장치를일컫는다. 고체촬상소자는반도체화하고집적화한촬상소자로서고체촬상소자로서고체촬상디바이스또는촬상관에대응하여촬상판이라고도한다. 특히, 고체촬상소자의일종인 CCD(Charge Couple Device) 는한때대용량기억장치 (mass storage) 에적합한것으로주목을받기도하였으나, 실제로대용량기억장치로는크게활용되지못하고 CCD 스캐너또는디지털카메라나비디오카메라의고체촬상소자 ( 영상센서 ) 로응용되고있다. 그림 2.3은고체촬상소자를이용한영상획득장치의예를보여준다. 그림 2.3의영상획득장치는모아레측정법을이용한예로 3차원표면형상을측정하기위해널리사용되어왔다. 그림 2.3을보면측정물이놓이는기준면에서제 1간격 (LL) 만큼이격된위치에광을발생하는광원이설치되어있고, 기준면과광원사이에는격자무늬가새겨진투영격자가배설되어있다. 또한, 기준면에놓이는측정물에서반사된광이통과하도록광원과투영격자가이루는영사광학계의광축 (A1) 에서소정거리이격된위치에는결상렌즈를통과한광이수광되도록상기결상렌즈의일측에는수광부가설치되어있다. 투영격자에는투영격자이송수단이결합되어, 투영격자를이송하게되어있다. 광원과투영격자가이루는영사광학계의광축 (A1), 결상렌즈와수광부가이루는결상광학계의광축 (A2) 은평행하게되어있고, 기준면에서광원까지의거리와기준면에서상기결상렌즈까지의거리는동일하게되어있으며, 영사광학 13
28 계의광축 (A1) 과결상광학계의광축 (A2) 은기준면에수직을이루고있다. 광원은소형이고경량이며가격이저렴한반도체레이저라고불리는레이저다이오드나혹은할로겐광원으로될수있으며, 수광부는 2차원영상센서로서 CCD(charge couple device) 카메라가입반적으로사용된다. 투영렌즈와결상렌즈는공지의렌즈로되어있으며, 이와같이구성된구조에서광원에서나온광이투영격자를통과하여측정물에서반사된다음결상렌즈를통하여수광부에도달하여상이맺히고, 결국모아레무늬를획득하게된다. 이때 3, 4, 5 버킷혹은 n 버킷등의알고리즘을구현하기위해서투영격자이송수단을이용하여투영격자를등간격으로이송하게된다. 하지만기존의 CCD카메라를이용하여촬상된영상을획득하게되면, 측정물체에조사되는광량에따라화면의외각이어둡게표현되는경우가있었다. 즉, 측정물체에빛이조사되지않은구간이발생하게되어그림자영역이발생한다. 이런경우에대구경의렌즈를사용하여측정물체전체에광을조사할수있지만가격이비싸기때문에쉽게적용하기가어려운문제를가지고있다 [12]. 14
29 그림 2.3 기존의영상획득장치구성 15
30 2.2 오목거울을이용한 3 차원영상획득시스템설계 본연구의목적은기존의영상획득장치의문제점을해결할수있도록소구경의렌즈를사용하면서도대구경렌즈를사용한것같은효과를내기위해서오목거울을이용한 3차원영상획득방법을제안하는것이다. 대구경렌즈를사용하면획득된영상의화면이전체적으로밝아지고외곽의어두운부분을없앨수있는장점이있기에소구경렌즈의구면에오목거울을사용하여광량을최대한입사시켜동일한성능을낼수있다. 그림 2.4는오목거울을사용한 3차원영상획득방법에대한구성을보여준다. 이를위해제안하는영상획득방법은측정제품에서반사되는광으로부터영상을획득하기위해서아래와같은특징을가지고있다. 1. 광을출사하는광원, 출사된광을집광하기위한집광렌즈, 입사되는광을투과시키는격자, 출사광을평행광으로출사하는영사렌즈, 전량의광을측정제품쪽으로출사하는오목거울그리고반사광을획득하는 CCD 카메라로구성되어있다. 2. 오목거울은입사광이측정제품쪽으로반사되지않아측정제품으로부터 CCD 카메라에입사되는광량이감소되지않는다. 3. 오목거울과측정제품사이에광경로변경수단이포한된다. 4. 광경로변경수단은빔스플리터또는 Half mirror를사용한다. 16
31 그림 2.4 오목거울을사용한구조 17
32 2.3 오목거울을이용한 3 차원영상획득 위의특징들로제안한구조는그림 2.4와같으며, 본연구의방법을통해그림 2.5과같이변형되어사용할수도있다. 그림 2.4의구조를보면광원으로부터출산된출사광은집광렌즈를통해집광되어격자로입사된다. 여기서격자는격자이동수단에의해화살표에표시된방향으로상하이동이가능하다. 격자로입사된광은격자를통과하여영사렌즈로출사되며, 영사렌즈는격자로부터입사되는광을입사하여평행광으로오목거울쪽으로출사한다. 오목거울은영상렌즈로부터입사되는평행광을입사하여오목한구면에반사시켜측정제품쪽으로반사하고, CCD카메라는측정제품으로부터반사되는광을입사하여영상을획득하게된다. 이때, 오목거울은오목한구면을통해입사되는광을반사하므로보다많은광량을반사시킬수있으며, 측정제품에반사되는전량의광을포커싱할수있는장점을가지고있다. 그림 2.5의 (a) 는그림 2.4와동일한기능을수행하며, 차이점은동일한구성에빔스플리터를추가로구성한것이다. 빔스플리터는영사렌즈로부터입사되는평행광을투과하여오목거울로출사하고, 오목거울로부터반사된반사광을측정제품쪽으로반사시킨다. 빔스플리터는오목거울을통해입사되는전량의광을그대로측정제품으로반사시키는것으로광경로를변경하는역할을한다. 그림 2.5의 (b) 는 (a) 의구성에빔반사거울을추가한예로, 빔반사거울은빔스플리터로부터입사되는반사광을측정제품으로반사시키는것으로광경로를변경하는역할을한다. 18

33 (a) 오목거울을이용한 3 차원영상획득방법의구성도 (1) 그림 2.5 오목거울을이용한 3 차원영상획득방법의추가예 19
")
34 (b) 오목거울을이용한 3 차원영상획득방법의구성도 (2) 그림 2.5 오목거울을이용한 3 차원영상획득방법의추가예 ( 계속 ) 20
35 그림 2.6는측정물체가비구면인경우에오목거울과의광경로를보여준다. 또한, 오목거울과측정제품이평면상에배치되어있는예로광경로를실선으로표시하였다. 오목거울의구면을통해반사된반사광은측정제품의전면에광을입사시키므로그림 2.3에설명된 CCD카메라의 CCD에는빛이들어오지않는영역이없음을알수있다. 반면, 점선으로표시된평면거울일경우는점선으로표시된광경로를따라측정제품으로진행하는데이때, A영역이생기는것을알수있다. 즉 A영역은 CCD카메라의 CCD에빛이들어오지않는영역을나타낸다. 따라서, 평면거울을사용하는경우에측정제품으로부터반사되는반사광중에 CCD로입사되지않는광이있으므로획득된영상의외곽의어두움이발생하게된다. 그림 2.6 제안한방법에적용된오목거울의광경로 그림 2.7 는측정제품이구면인경우에오목거울과의광경로를보여준다. 21
36 그리고오목거울과측정제품이평면상에배치되어있는예로광경로를실선으로표시하였다. 오목거울의구면을통해반사된반사광은구면의측정제품의전면에광을입사시키므로그림 2.5에설명된 CCD카메라의 CCD에는빛이들어오지않음을알수있다. 즉 B영역은 CCD카메라의 CCD에빛이들어오지않는영역을나타내며, 오목거울과평면거울에동일한광량을반사시키는평면거울의경우 B영역이발생하므로평면거울에반사된전량의광이입사되지못하나, 오목거울의경우반사되는전량의광이입사된다. 따라서, 평면거울을사용하는경우에측정제품으로부터반사되는반사광의전량이 CCD로입사되지못하므로획득된영상의전체적인영상이어두워진다. 또한, 그림 2.6의경우측정제품이원형이므로기준면을기준으로오목거울의반대쪽에는그림자영역이발생할수있으며, 오목거울로부터반사된반사광은기준면부근에서만약간의그림자영역이발생하는데그치나, 평면거울로부터반사된반사광은기준면을기준으로평면거울의반대쪽에는모두가그림자영역이된다. 이로인해그림 2.7과같이평면거울과오목거울의사용여부에따라측정제품으로부터입사되어 CCD에입사되는반사광의광량의차이가있음을알수있다. 22
37 그림 2.7 제안한방법에적용된오목거울의광경로 µ θ < 대구경렌즈를사용한경우 > < 소구경렌즈를사용한경우 > 그림 2.8 NA 와표면굴곡의관계 23
38 2.4 실험및고찰 본절에서는오목거울을이용해 3차원영상획득방법의성능을평가하기위해몇가지의실험을하였다. 먼저대구경렌즈와소구경렌즈를사용했을때의영상측정의결과를비교하였다. 실험을통해, 동일한영상에대해대구경렌즈를사용했을때와소구경렌즈를사용했을때의결과영상을확인하였다. 그리고, 오목거울의사용유무에따른결과영상을비교하였으며, 이를통해영상의 SNR 변화를측정하였다. 그림 2.9은대구경의렌즈와소구경렌즈의영상측정을컴퓨터시뮬레이션한결과를비교한그림이다. 격자가영사된영상을보면대구경의렌즈를사용했을시의성능과소구경렌즈의성능이확연히차이가나는것을알수있다. 대구경렌즈를사용했을경우, 소구경렌즈를사용한경우에비해전체적인영상의밝기가밝아졌으며, 외각의어두운부분도사라짐을확인할수있었다. 하지만실제적으로대구경렌즈는가격이비싸기때문에쉽게적용시키기가어려운실정이다. 하지만, 본연구를통해소구경렌즈에오목거울을사용하여 3 차원영상측정에대해서대구경렌즈의성능과동일한성능을낼수있음을확인하였다. 24

39 < 격자가영사된영상 > (a) 대구경렌즈의사용 그림 2.9 대구경렌즈와소구경렌즈의비교 25

 / ( 경사부밝기 ),")
40 (b) 소구경렌즈의사용 그림 2.9 대구경렌즈와소구경렌즈의비교 ( 계속 ) 그림 2.10 은 FC-CSP 제품의 Round bump 를현미경촬영한영상이다. NA 값의변화에의한밝기분포를 Profile 로나타내었다. 영상내의밝은부분과어두움부분의밝기비를다음과같이각각 C1 = (SR 표면밝기 ) / ( 경사부밝기 ), C2 = ( 볼정상밝기 ) / ( 경사부밝기 ) 로정의되고, 영상내에서의영역별밝기편차를 26
41 나타낸다. C1, C2 가커지면영역별로밝기의차이가커지므로밝은부분이측정될수있도록빛의양을설정하면어두운부분의측정이측정불가능해지고, 또한반대의경우도발생하게되므로 C1, C2 값은작아질수록대상물체를측정하기용이하다. 조사광학계의 NA 값이클수록 C1, C2 가작아지므로대상물체의표면에격면반사와굴곡이있는경우에도측정능력이대폭향상됨을의미한다. NA 가 0.46 인경우는일반적인 Confocal 현미경들이사용하는범위에해당한다. 그림 2.11 은 NA 값에따른 C1, C2 의변화를나타내는데, NA 값이증가함에따라측정능력이급격히향상됨을알수있다. 표 2.1은광량향상및진폭차이의노이즈변화를측정한것이다. 표 2.1을통해영상의평균밝기가낮은경우카메라노이즈에더욱민감하며이는최종결과에많은영향을미치는것을확인하였다. 그림 2.12는렌즈구경에따른 raw 영상의결과를비교한것이며, 소구경렌즈를사용한격자영상의 Contrast는 0.019~0.415이고전체적으로어두운반면, 대구경오목거울을사용한격자영상의 Contrast는 0.17~0.35이면서전체적으로밝다. 여기서 Contrast는 I I max max I I min min 로정의한다. 대구경오목거울을사용했을시영상의전체적인 품질및밝기가좋아졌으며, 제품표면의윤곽에따른음영이거의사라짐을알수있다. 결과적으로대구경오목거울을사용하면전체적인성능이향상되는것을확인할수있었다. 27
42 A B A C A B A C A A (a) NA = 0.15, C1 = 4.11, C2 = A A (b) NA = 0.3, C1 = 2.82, C2 = 8.23 그림 2.10 NA 값에따른굴곡부위의가시성 28
43 A A A B A C A A A B A C (c) NA = 0.46, C1 = 2.00, C2 = 3.62 (d) NA = 0.8, C1 = 1.07, C2 = 1.33 그림 2.10 NA 값에따른굴곡부위의가시성 ( 계속 ) 29
44 C1 C N.A. 값 ( C1 = SR 표면밝기 / 경사부밝기, C2 = 볼정상밝기 / 경사부밝기 ) 그림 2.11 NA 값에따른굴곡부위의가시성변화 표 2.1 광량향상및진폭차이의노이즈변화 소구경렌즈 대구경오목거울 특정영역평균밝기 (Gray level) 카메라노이즈 5 5 (Gray level) SNR
45 (a) 소구경렌즈를사용한격자영상 (Contrast=0.019~0.415) 그림 2.12 테스트결과 Raw 영상 Profile 비교 31
 그림 2.")
46 (b) 대구경오목거울을사용한격자영상 (Contrast =0.17~0.35) 그림 2.12 테스트결과 Raw 영상 Profile 비교 ( 계속 ) 32
47 제 3 장스캐닝모아레측정방법 본장은모아레무늬획득방법및이를이용한대상물체의높이측정방법에관한것으로, 라인스캔카메라를사용하여구성이간단하고아울러투영격자하나만을사용한영사식모아레방식을이용하여작은높이단차를갖는물체의 3차원형상을복원하고그높이를용이하게측정할수있도록한모아레무늬획득방법및이를이용한대상물체의높이측정방법에관한것이다. 기존의방법은한위치에서다수의영상을받아측정을완료한후위치를이동하여다시다수의영상을받아측정하는방식으로측정되었으며, 본논문에서제안하는방법은이동하면서연속적인영상을획득하는방법을이용함으로써측정시간을획기적으로단축시킬수있을뿐만아니라기존에면적카메라를사용하던것을최초로라인스캔카메라를적용함으로써간단하고도빠른측정이가능하게한다. 주목적은측정영역이넓은대상물체를빠른시간에측정하는것이다. 본장에서 3.1절과 3.2절에서는모아레현상과 3차원복원기술에대해설명하였고, 3.3절은기존모아레측정방법에대해설명하였고, 3.4절과 3.5절은논문에서제안하는스캐닝모아레측정방법에대해설명하고, 3.6절에서동일한대상물체에대해실험을하여두방법간의성능을비교평가하여측정속도및측정정밀도의성능을분석하였다. 그리고각방법에대한실험결과를제시하였다. 33
48 3.1 모아레현상 모아레 (Moiré) 란단어는프랑스인들이고대중국에서수입된비단위에나타나는물결무늬를일컬었던말로, 요즘에는두개이상의주기적인물결무늬가겹쳐져생기는간섭무늬 (interference fringe) 를지칭하는단어로사용된다. 모아레현상은연속되는패턴이있는물체를촬영했을때, 동일한무늬가연속되는의류나커튼을촬영했을때에나타나며, 직선들이나곡선들에다른직선들또는곡선들을겹쳤을때나타나는기하학적모양을말한다. 또한, 일정한간격을갖는물체사이에발생하는간섭무늬를말하기도한다. 예를들어햇빛이비치는날모기장이나커튼등이겹쳐져있으면물결무늬가생기는것을볼수있다. 이것이모아레현상이다. 그림 3.1은모아레현상을나타난영상을보여준다 [13]. 1874년에 Lord Rayleigh에의해모아레현상을과학적도구로사용하자는제안이실현되면서모아레현상을이용한미세한물체의움직임관찰이나의료용사진촬영등에사용되면서다양한분야에서활용되고있다 [14]. 모아레기술은표면의이동을측정하기위해서모아레패턴의이용하는것을말하며, 모아레패턴의기술은표면의변형상태의특징이모델격자로불리는격자에의하여나타난다. 이기술은물체에직접접촉하지않고도측정할수있어물체가훼손될염려가없다는것도장점이다. 즉, 모아레방식은직선형태의기준격자무늬를측정할대상물체에투사하면대상물의표면형상에따라변형되어진격자무늬가생성되며, 기준격자무늬와변형된격자무늬가서로간섭을일으켜형성 34

49 된등고선형태의무늬를통하여 3 차원의형상영상정보를추출해내는방법 이다. 그림 3.1 모아레무늬나타난영상 35
50 3.2 3 차원복원기술 최근에측정, 문화재, 반도체그리고의료분야등에서 3차원복원기술에대한영향력이점점더커지고있다. 3차원복원기술은최근숭례문소실로인해관심이집중되었으며, 문화유산등을디지털로보존하거나복원하는기술로많이알려져있다. 또한, 3차원복원기술은응용되어문화유산을 3차원디지털모델로복원하는작업이이루어지고있고, 측정기술및반도체분야에서도사용되고있다. 일반적으로 3차원복원기술은물체의 3차원형상과표면의색상을디지털화하는레이저방식의 3차원스캐너를이용하여복원을원하고자하는물체의형상과표면의색상을디지털화하고, 컴퓨터그래픽이나 3차원가상현실등과같은미디어등을통해현실과동일하게재탄생시키는기술이다. 근래에는디지털카메라의발전으로 3D 레이저스캐너와영상기술을통해대량의데이터를정확하고용이하게얻을수있다. 이러한 3차원형상은영구적인보존및μm단 위의높은정밀도가가능한장점을가지고있다. 현실에서얻은 2D 자료를통해현실과동일한 3D 영상을얻을수있어, 3차원복원기술은다양하게발전하고있다. 3차원복원기술은그림 3.2와같이접촉식과비접촉식으로구분할수있다 [15]. 접촉식은직접측정대상물체표면에접촉하여그형상을측정하는방식이고, 비접촉식은광원을이용하여측정대상물체표면에접촉하지않고측정하는방식을말한다. 그러나, 접촉식방법은측정시간이과다하게소용되는단 36
51 점이있어근래에는모아레측정법이라는비접촉식으로측정하는광학식이많이사용되고있다. 비접촉식측정기술을통해물체의데이터를 3차원형상모델데이터로변환하여사용되고있으며, 복원기술분야에서는고정밀기술들이개발되어측정의생산성과정밀도가높아지는방향으로기술이발전중에있다. 광학식 3차원복원방법은센싱방법에따라그림 3.3과같이능동, 수동방식으로분류할수있다. 비접촉식형상측정분야에서많이사용되는모아레간섭계는다른 3차원측정법에비해측정시간이짧으면서, 정밀도는좋은장점을가지고있다. 이런모아레간섭계는장치구성에따라그림자식모아레와투영식모아레로나뉜다. 그림자식모아레는모아레를이용한 3차원형상측정에서가장널리사용되고있는방법으로, 측정물체가작거나높은정밀도를요구하는물체에많이사용하며격자의그림자에의해모아레무늬가생성되는특징과높은가시도를가지는모아레무늬를비교적쉽게얻을수있는장점을가진다. 투영식모아레는큰물체를측정할경우에많이사용되며, CCD 카메라앞에있는격자패턴대신컴퓨터에서만든격자패턴을사용한다. 37
52 그림 차원복원기술분류 그림 3.3 센싱방법에따른광학식 3 차원복원기술분류 38
53 3.3 기존의모아레측정방법 모아레측정방법은일반적으로자유곡면형태의삼차원형상을측정하는기술로, 3차원측정기를사용하여접촉식으로곡면상의한점씩측정하여전체곡면형상을측정하는방식이다. 그러나, 이러한방식은측정시간이과다하게소용되는단점이있어서, 근래에와서모아레방법이라는비접촉식으로측정하는광학식이많이사용되고있는데, 이는 3차원측정기를사용하는접촉식에비해측정시간이월등히단축되는큰장점을가지고있다. 모아레방법은측정대상물의 3차원형상정보를가지는모아레무늬를얻기위하여측정대상물에일정한간격의직선줄무늬를형성시켜야하고, 이를정밀하게이송시켜야한다 [16~19]. 이를위해기존의방법에서는유리의한쪽표면에크롬으로일정한간격의직선줄무늬를새겨넣은투영격자를영사광학계를이용하여측정대상물에투영하였다. 또한, 측정대상물에형성된직선줄무늬를일정한간격으로이송시키기위해투영격자이송장치를사용하고있다. 고전적인방법으로모아레무늬를통해 3차원측정을하는방법으로 Shadow Moiré[20] 와 Projection Moiré[21] 가있다. Projection Moiré는기준격자와조사격자를사용하는방법이고, Projection Moiré와원리는같으나하나의기준격자만을사용하는것이 Shadow Moiré방법이다. 그외다수의 3차원스캐닝모아레방법의연구가있었다 [22~25]. 기존의모아레방법의 3차원측정기에서얻어진영상은측정대상물의높이정보를나타내는모아레무늬와카메라앞에놓여있는기준격자의무늬가동시에나타나기때문에기준격자의영상을제거하기 39
54 위한별도의수단이필요하게되어구성이복잡해지게된다는문제점이있었다. 초기에는기준격자의영상을제거하기위하여 FFT등의변환을사용하였다. 이후, 기준격자와영사격자를동시에이동시키며 Time-Integral을수행하여기준격자를제거하는방법이연구되었지만 [9] 격자의이동시이동축의정밀도문제가있기때문에마이크론급의정밀측정에는적합하지않았다. 현재주로사용되는방식으로기준격자가나타나지않고단지위상만측정되는방법이고안되었는데, 기준격자없이영사격자만사용하고 Phase-Shifting기법을사용하여위상만을측정하기때문에시스템의간편화및정밀도구현이가능하였다 [26, 27]. 기존의모아레방법은카메라가정지한상태에서영상을획득하되투영격자를 3회이상움직이면서 3개이상의모아레영상을얻은다음알고리즘을통해측정결과를획득한후에대상물을인접위치로이동시켜위와같은방식을되풀이하면서측정을진행한다 [28~30]. 만약측정해야할영역이넓을경우각영상을얻는위치마다투영격자를 3회이상움직여야하므로, 측정속도가많이소용될뿐만아니라투영격자를이송할때마다진동이발생하여측정정밀도가저하되는문제점이있다. 3.5절에서는라인스캔카메라를이용하여이러한문제의해결방안을제시하였다. 40
55 3.4 Moiré 의원리 모아레무늬는비슷한주기를갖는여러개의격자가겹쳐질때맥놀이 (beating) 현상에의해발생하는저주파의고유한무늬로정의되며다양한분야에서매우광범위하게사용되고있다. 모아레는구현방법으로 Shadow Moiré와 Projection Moiré로구분한다. 이들모아레법에서사용하는격자 (Grating) 들은일반적으로 Ronchi-ruling이사용되고있다 Shadow Moiré 의원리 규칙적인격자에평행광이입사되어격자를통과해서물체에서반사된빛과격자에서반사된빛이서로간섭을일으키는방식을 Shadow Moiré법이라고한다. 일반적으로입사된평행광과격자에서반사된반사광사이의간섭을쉽게해석하기위해서관찰하는위치를격자로부터충분히먼거리에설정한다. 그림 3.4a에서평행광이조사되었을때 Grating에서물체까지의높이변화는다음과같이표현할수있다 [20]. p z (3.1) tan tan 여기서 는임의의지점의격자에수직인축과조명의조사방향간의각도차이, 41
56 는임의의지점의격자에수직인축과관찰방향간의각도, p 는격자의피치 를나타낸다. 그림 3.4a 구성에서는평행광을커다란 FOV에대해무한대의거리에서관찰하는컨셉이므로실제적으로구현하기에는어려움이따른다. 그림 3.4b의컨셉은조명원과카메라의거리가격자로부터동일한위치에위치한경우이다. 이경우높이는다음과같이표현할수있다. z n N p (3.2) d N p / l 여기서 N 은무늬의차수를나타내고, l 은격자평면으로부터의거리, d 는조 명원과관찰점사이의거리를나타낸다. 42
57 그림 3.4 Shadow Moiré geometry for (a) equal plane contours, (b) non-equal plane contours and (c) asymptotic curved sheet contours 식 (3.2) 에서 n 인조건이주어지고 d / l tan tan N p 로표시 하면식 (3.2) 는다음과같이표현할수있다. 결국모아레무늬의간격은 N tan N p z (3.3) tan, 그리고측정높이에의해서결정됨을알수 있다. 43
58 3.4.2 Projection Moiré 의원리 조사계를이용해서격자를대상물체의표면에조사하고, 대상물체의표면에조사된격자무늬를기준격자를이용하여관찰하고측정하는방식을 Projection Moiré법이라고한다. 대상물체표면의간섭무늬를획득하기위한조건은아래와같다 [31]. 조사격자와기준격자의밝기분포구조가선형 / 조화분포를갖고있어야한다. 조사광학계와결상광학계의광축이서로평행해야한다. 격자들이서로평행해야한다. 대상물체의표면에결상된격자의주기와기준격자의주기가동일해야한다. 그림 3.5에서 N번째의 Contour는다음과같이표현할수있다 [21]. z N Npl p l p l df Np p f f (3.4) 여기서 p 는격자의피치, l p 은기준면과렌즈의거리, f는렌즈의초점거리를 나타낸다. 실제로 Projection Moiré 측정시스템에서평행광과 Telecentric 광학계를사용 44
59 하였을때간섭무늬간격당높이차이는다음과같이표현할수있다. p' z (3.5) tan tan 여기서 p' 는대상물체에투사된격자의피치를나타낸다. 식 (3.5) 에각도 를 각도 의좌표계에맞춰서각도 로표현하면식 (3.5) 의 tan tan 는다 음과같이쓸수있다. tan tan tan tan tan tan (3.6) 또한 d tan tan (3.7) l p 이므로식 (3.6) 와식 (3.7) 를사용하면등가파장 z 는 l p p' l p p' z tan tan d (3.8) 이되고영사렌즈와결상렌즈가동일한렌즈일경우렌즈의배율을 M 이라고 45
60 했을때 p' p M 로표현할수있으므로식 (3.8) 은 l p p z Md (3.9) 로표현할수있다. 따라서 Projection Moiré System이그림 3.5와같이되어있을때높이측정이가능한단차 ( 등가파장 ) 는식 (3.9) 를통해서구할수있음을알수있다. 반대로측정하려는최대단차가정해졌을때필요한렌즈의배율과격자의피치등을정할수있게된다. 그림 3.5 Projection Moiré system 46
61 3.4.3 모아레무늬의기하학적해석 모아레시스템에서획득된모아레무늬는해석기법을사용하여 3차원측정에사용된다. 일반적으로간섭계에사용되는해석기법과무아레무늬는다양한광학원리의시스템에비슷하게적용되어진다. 모아레시스템에서는 2차원의밝기분포를가진영상을입력받아 3차원데이터를측정한다. 즉, 2차원의모아레무늬영상을통해위상 (Phase) 를추출하여높이값으로환산하는처리를한다. 일반적으로모아레무늬를표현하기위해사용하는수식은다음과같다 [32]. x y a x, y b x, y cos x y I,, (3.10) 모아레무늬영상에서임의의지점의밝기분포는그림 3.6 과같이표시할 수있다 [31]. 모아레무늬는기준면과측정면의높이차이에의해서나타나는 반복적인조화분포를갖는무늬이다. 그림 3.7 에모아레무늬를예시하였다. 47

62 그림 3.6 Intensity distribution of a fringe pattern 그림 3.7 모아레간섭무늬의예 48
63 3.4.4 모아레무늬의해석 (Phase-Shifting technique) 모아레측정시스템은광원을투영격자와투영렌즈를통해대상물체에조사시킨후, 투영격자가조사된대상물체를기준격자에결상시킨후, 이결상되영상을카메라로획득하여높이데이터를산출하게된다. 일반적으로투영격자는격자의수직방향으로사인분포또는여백과격자선두께의비가 1:1인 Rinchi-rulling 격자를사용한다. Phase-Shifting기법으로 FOV의모든픽셀의밝기를동식에측정한다 [33]. Phase-Shifting기법을사용하면모든픽셀의영상신호가모든측정주기에대해서집적되기때문에저조도의영상을획득함에도불구하고 SNR를증가시킬수있는장점을가진다. 기준과실험위상의복소진폭 (Complex amplitude) 을다음과같이표현하면 a x y a exp ikp, 0 (3.11) x, y b0 exp ikw x y b, (3.12) 여기서 x y 같이표현된다. W, 는측정면의프로파일을나타낸다. 간섭무늬의밝기는다음과 I 2 2 x y, p a b 2a b cos k W x, y, p (3.13) 49
64 식 (3.13) 은다음과같이표현할수있다. I x y, p f g cos kp h sin kp, 1 1 (3.14) 여기서계수 1 f, g1, h 은 x 와 y 의함수이다. 식 (3.14) 는 Fourier series 의상수 항과 1 차항으로구성된식이다. 따라서, 모든픽셀의계수들은 p 가다음과같 이주어졌을때위치에서측정된밝기값 I x y, p 값들이다., 에의해서계산될수있는 p p j j / 2m (3.15) 여기서 j 1, 2,3,..., mq 이고 m 과 q 는정수이다. 그러면 g 1 mq 2 / mq I x, y, p j j 1 2a b cos kw x, y 0 0 cos kp j (3.16) h 1 mq 2 / mq I x, y, p j j 1 2a b sin kw x, y 0 0 sin kp j (3.17) 따라서 50
65 W 1 x, y 1/ k tan h / g (3.18) 1 1 m 로설정하여 100번의측정을통해 x y 이된다. ( 25, q 4) 수도있지만, 일반적으로 m 8, q 1 W, 를계산할 로설정하는 8 단계방법이많이사용된 다. 좀더간단한방법으로 3번의등간격으로위상을변화시키면서 4번의측정을하는방법이제안되었다 [34]. 이렇게하면기준격자와의위상차이를계산할수있다. 좀더간단히하여 3번의측정을통해위상차이를측정한는경우도있다. 이경우 0, 90, 180 에서모든픽셀의밝기를측정한다. 3 / 2 I / 2 I 0 I I tan (3.19) 식 (3.19) 는가장일반적으로사용되는계산알고리즘으로 4번측정하는방법이다 (4-Bucket algorithm). 밝기는각각 0, 90, 180, 270 에서측정하고위상차이를계산할수있다. 영사식모아레에서위상천이법의적용은영사격자와기준격자사이의상대변위를인위적으로인가함으로써수행된다. 일반적으로사용되는 4-버킷알고리즘 [35] 을사용할경우, 두격자사이의상대변위를위상으로나타낸값 2 p 가순차적으로 0, / 2,, 3 / 2 가되도록상대이송을하고, 각각에 위상이송에대해모아레무늬광강도 I 0, I / 2, I 2 / 2, I 3 / 2 을획득한 51
66 다. 그리고각측정점에서식 (3.19) 를이용해서추출하고자하는초기위상의주 위상값 x, y 를구할수있고 [35, 36], 각측정점에서의높이는 W x, y x, y z 2 (3.20) 로표현할수있으며, 구해진초기위상의주위상값 x, y 을이용하여측정점에서의높이 x y 로부터식 (3.20) W, 를구할수있다. 그러나여기서한가 지주의가요구된다. 이는식 (3.19) 로구해지는초기위상값은 1 tan 연산의 특성으로인해 와 사이의위상값만을가진다. 이를다르게표현하면, 측정물의단차가 z / 2 보다작게측정된다. 이를위상천이기법의 2 모호성 문제라한다. 모아레현상을이용한측정에서위상천이기법의도입은위상값 연산에많은장점을부여한다. 예로반사율이위치에따라변화하는표면이나 불연속면을갖는표면의경우에도측정을할수있다. 반면위상천이기법의도 입은 2 모호성문제를가져오며, 이로인해단차가큰물체의측정이어려워 지는단점을갖게된다. 또한, 식 (3.4), 식 (3.20) 에서나타난모아레무늬위상과높이값과의비선형적인관계를보정하기위해서는측정점의모아레무늬의절대위상값을알아야하나, 위상천이기법만으로는주위상값만을추출하는문제가있다. 그러므로, 모아레측정에서효율적인위상천이기법을도입하고, 정 밀한측정을위해보정을수행하기위해서는 2 모호성문제에대한근원적인 해결이필요하다 [37]. 52
67 3.5 라인스캔모아레측정장치의설계 본연구에따른모아레무늬획득방법은그림 3.8과같이구현되어있으며, 광을이용하여투영격자를대상물체에영사하는영사수단과그것으로부터대상물체에영사된영상들을위상에따라촬영하고스캐닝하여획득하는라인스캔카메라와이로부터전송된영상들을이용해모아레무늬를해석하여대상물체의 3차원형상을분석하는컴퓨터로구성되며, 이를토대로기존의문제점을해결하고자한다. 그림 3.8 모아레무늬획득방법 그림 3.9 는영사식모아레구현을위한기본적인구성을보여준다. 영사식 모아레광학계는크게영사격자의투영을위한영사계와물체위에투영된격 자상의결상을위한결상계로나누어진다. 영사계에서는백색광광원의빛을 53
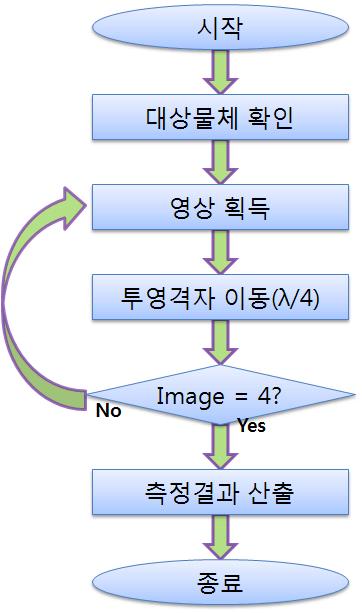
68 집광렌즈를통해영사격자에조명한다. 그리고, 영사격자의격자무늬를영사렌즈를통해측정하고자하는물체위에결상한다. 이때, 영사격자의여백과격자선이 1:1인론키롤링 (Ronchi-rulling) 형태의격자가사용된다 [8]. 물체위에결상된직선격자의상은측정물의 3차원형상에따라변형되며, 이변형된격자상은다시결상계의결상렌즈에의해영사격자와동일한형태를가지는기준격자위에결상된다. 이때, 기준격자와변형된격자가겹치게되어모아레무늬가형성되고, 이모아레무늬는릴레이렌즈 (relay lens) 와 CCD에의해광강도 (intensity) 에비례하는전기적신호로획득된다 [24]. 본연구에따른모아레무늬획득방법을이용한대상물체의높이측정방법의단계는아래와같이진행된다. 1단계 : 조명부가켜짐에따라광이대상물체로조사될수있도록엑추에이터를이용하여투영격자부를미세하게조정하여렌즈를통해대상물체에미세격자를투영한다. 2단계 : 라인스캔카메라를통해상기대상물체에영사된영상들을위상에따라촬영하고스캐닝하여획득한후, 라인스캔카메라에얻어진영상들을컴퓨터로전송한다. 3단계 : 컴퓨터의스캐닝모아레해석모듈을통해영상들을이용모아레무늬를해석하여대상물체의 3차원형상을해석한다. 그림 3.10 은제안하는측정방법의순서도를나타낸것이다. 54
69 그림 3.9 라인스캔모아레측정방법의순서도 55
70 3.6 라인스캔모아레측정 위단락에서설명한내용과같이구성된모아레무늬획득장치를이용하여 대상물체의높이측정하였다. 먼저, 모아레무늬획득장치의하측에대상물체를 위치시킨다. 예를들어, 대상물체인솔더볼을그림 3.11 와같이배열한다. 중앙 에지름이약 40 μm이고높이가약 20~25 μm인솔더볼은그리드배열을갖는플 립칩 (flip chip) 상면에안착된다. 위와같이모아레무늬획득장치의하측에대 상물체가위치되면조명부를온 (on) 시킨다. 이에따라, 광이대상물체로조사된 다. 그리고, 조명부의광이투영격자부를통해대상물체로조사될수있도록, 액추에이터를이용하여투영격자부의미세격자는렌즈를통해대상물체에투영 된다. 한편, 라인스캔카메라는대상물체에영사된영상들을위상에따라촬영 하고스캐닝하여획득한다. 라인스캔카메라의동작을그림 3.12 를참조하여살펴보면, 하나의라인을 따라움직일수있도록설치되어있어서총 4 번의스캔으로대상물체의영역에 대한 4 장의영상들을얻게되고, 각스캔영상의촬영시, 투영격자부의이송에 따라대상물체에투영되는투영격자들의위상을 / 4 영상을얻게된다. 즉 4장의스캔영상들은각각 / 4 만큼이동시킨후, 스캔 의위상차를갖는투영 격자가영사된영상들이다. 이때첫번째얻는스캔영상는투영격자가초기위치 에있는상태에서얻은영상이고, 두번째얻는영상은투영격자가초기위치에 서 / 4 만큼이동한상태에서얻는영상이며, 세번째얻는영상은투영격자가 초기위치에서 2 / 4 만큼이동한상태, 네번째영상은초기위치에서 3 / 4 56
71 만큼이동한상태에서얻는영상이된다. 그러나만약투영격자를먼저 / 4 상을얻는경우, 각스캔영상의초기위치는 / 4 만큼이동한상태에서첫번째스캔영 가되므로그림 3.12 와같이 표현된다. 이후라인스캔카메라는위와같은방법으로얻어진영상들을컴퓨 터로전송한다. 그리고컴퓨터는스캐닝모아레해석모듈을통해영상들을이용 모아레무늬를해석하여대상물체의 3 차원형상을해석한다. 그림 3.10 대상물체의확대 57
72 그림 3.11 대상물체의모아레무늬획득 그림 3.13은모아레측정기의개략적인측정흐름도를나타낸것이며, 측정방법은아래와같다. 먼저대상물체는좌우및전후방향으로이동하는 XY테이블위에놓이고그위쪽에는광원과투영격자및라인스캔카메라가위치한다. 모아레측정알고리즘이탑재된중앙제어부는영상인터페이스부, 투영격자구동드라이버그리고 XY테이블구동드라이버와연결되어이들을제어한다. 영상인터페이스부는라인스캔카메라로부터전달되는영상을획득하고처리하여그결과를중앙제어부로전송하며, 투영격자구동드라이버는투영격자구동부를구동시켜투영격자를미세이동시킨다. 이때중앙제어부는대상물체의 58
73 해당측정범위를스캐닝하여첫번째영상을획득한후투영격자를이동시키고, 이를반복하여네번째영상을획득하도록투영격자구동드라이버와제어한다. 또한 XY테이블구동드라이버는 XY테이블을전후및좌우로이송하는모터를구동시켜대상물체의측정영역이라인스캔카메라에게영상으로획득되도록제어한다. 측정순서는아래와같이총 11단계로이루어진다. 1 단계 : 광원의빛을온 (on) 시켜투영격자의그림자가대상물체에비추도록 한다. 2 단계 : 대상물체의시작지점 ( 그림 3.13 의 A 지점참조 ) 이라인스캔카메라 의수직선상에위치하도록 XY 테이블을제어한다. 3 단계 : 투영격자를초기위치에위치시킨다. 4 단계 : XY 테이블을구동시켜대상물체를끝지점 ( 그림 3.13 의 B 지점참조 ) 까지연속으로이동시키면서대상물체모든위치의제 1 영상을획 득한다. 5단계 : 투영격자를초기위치보다 / 4 만큼이동시킨다. 6 단계 : XY 테이블을구동시켜대상물체를끝지점에서시작지점까지연속으 로이동시키면서대상물체모든위치의제 2 영상들을획득한다. 경우에따라영상획득시시작지점에서끝지점으로대상물체를 이동시키면서영상을획득한다. 7단계 : 투영격자를초기위치보다 2 / 4 만큼이동시킨다. 8 단계 : XY 테이블을구동시켜대상물체를시작지점에서끝지점까지연속으 59
74 로이동시키면서대상물체모든위치의제 3 영상들을획득한다. 9단계 : 투영격자를초기위치보다 3 / 4 만큼이동시킨다. 10 단계 : XY 테이블을구동시켜대상물체를끝지점에서시작지점까지연속 으로이동시키면서대상물체모든위치의제 4 영상들을획득한다. 11 단계 : 위단계에서얻은대상물체모든위치의제 1 영상들 ( 투영격자가초 기위치에있을때얻은영상 ) 과제 2 영상들 ( 투영격자가초기위치보 다 / 4 만큼이동했을때얻은영상 ) 과제 3영상들 ( 투영격자가초 기위치보다 2 / 4 만큼이동했을때얻은영상 ) 과제 4영상들 ( 투영 격자가초기위치보다 3 / 4 만큼이동했을때얻은영상 ) 을모아 레해석모듈에적용하여대상물체의 3 차원영상을해석한다. 위에서설명한본연구의모아레측정방법의투영격자이동거리는 λ 의배 수인 / 4, 2 / 4, 3 / 4 만큼이동하였으나, 이는투영격자의이동거리를정 확히알지못하더라도임의거리만큼이동시키면서측정하는측정알고리즘이공 지되어있으므로, 이러한알고리즘을적용하면투영격자의이동거리를임의거리 이동시켜도측정할수있다. 본연구의모아레측정방법은대상물체의모든위치에대한영상을획득 하는데투영격자를단지 3 회이동하였음을알수있다. 기존의모아레측정방 법은대상물체의각위치마다투영격자를이동하므로측정시간이많이소요될 뿐만아니라투영격자를이동시킴에따른진동이영상을왜곡시켜측정정밀도 가저하될수있지만본연구의모아레기법은기존의측정방법에비해측정 60
75 시간이매우빠르고측정정밀도도뛰어남을알수있다. 그림 3.12 모아레무늬획득장치의제어블록도 61
76 3.7 측정방법의비교 측정지점이 10개라고가정하고본연구의모아레측정방법과기존의모아레측정방법을비교하였다. 표 3.1은기존의모아레방법과제안한모아레방법의비교를보여준다. 본연구에서제안하는모아레측정법은투영격자를이동시킨후일괄적으로영상을획득하므로투영격자를이동시키는 4단계와 10개의지점별로 4개의영상을획득단계인 40단계와획득된영상으로 10개의지점별측정결과를산출하는 10단계로이루어지므로전체 54단계에서측정이완료된다. 따라서 10개의지점을측정한다고가정했을때본연구의모아레측정방법은기존의모아레방법에비해절반의단계만으로측정이수행됨을알수있다. 그러나모아레방법에서시간이많이소요되는단계는투영격자를기계적으로이송하는단계이므로측정시간측면에서고려하면, 본연구의모아레방법은기존의모아레방법에비해약 1/10 정도로줄어들수있으므로, 측정시간은획기적으로줄어들게된다. 즉, 본연구는위에설명한바와같이라인스캔카메라를적용하여투영격자를고정시킨상태에서모든측점지점을연속적으로이동하면서각측정지점의영상을획득하는방식으로측정이완료될때까지단지투영격자를 3회만이송시키기때문에투영격자를이송시키는횟수를줄일수있어측정시간을획기적으로단축시키고측정정밀도를높일수있다. 표 3.2를통해라인스캔카메라의장점, 표 3.3을통해동축모아레측정방법의장점을설명하였고, 표 3.4는라인스캔카메라의성능및스펙을나타내었고, 표 3.5는측정에사용된광학부품들을나타내었다. 62
77 표 3.1 기존의모아레방법과의비교 (a) 기존의모아레측정방법 (b) 제안하는모아레측정방법 측정대상물체제 1 지점으로이동 1 단계제 1 지점의제 1 영상획득 제 1 지점의제 1 영상획득 2 단계제 2 지점의제 1 영상획득 투영격자 ( / 4 ) 이동 3단계제 3지점의제 1영상획득 제 1 지점의제 2 영상획득 4 단계제 4 지점의제 1 영상획득 투영격자 ( 2 / 4 ) 이동 5단계제 5지점의제 1영상획득 제 2 지점의제 3 영상획득 6 단계제 6 지점의제 1 영상획득 투영격자 ( 3 / 4 ) 이동 7단계제 7지점의제 1영상획득 제 3 지점의제 4 영상획득 8 단계제 8 지점의제 1 영상획득 투영격자 ( 4 / 4 ) 이동 9단계제 9지점의제 1영상획득 제 1 내지제 4 영상을통해 제 1 지점의측정결과산출 10 단계제 10 지점의제 1 영상획득 측정대상물제 2지점으로이동 11단계투영격자 ( / 4 ) 이동 제 2 지점의제 1 영상획득 12 단계 제 10 지점에서제 1 지점까지 연속적으로이동 투영격자 ( / 4 ) 이동 제 10지점의제 2영상획득 제 2 지점의제 2 영상획득 제 9 지점의제 2 영상획득 투영격자 ( 2 / 4 ) 이동 제 8지점의제 2영상획득 제 2 지점의제 3 영상획득 제 7 지점의제 2 영상획득 투영격자 ( 3 / 4 ) 이동 제 6지점의제 2영상획득 63
78 제 2 지점의제 4 영상획득 제 5 지점의제 2 영상획득 투영격자 ( 4 / 4 ) 이동 제 4지점의제 2영상획득 제 1 내지제 4영상을통해제 2지점의측정결과산출 제 3 내지제 9지점을동일한과정으로측정결과산출 제 3 지점의제 2 영상획득 제 2 지점의제 2 영상획득 제 1 지점의제 2 영상획득 투영격자 ( 2 / 4 ) 이동 측정대상물체제 10 지점으로이동 제 10 지점의제 1 영상획득 제 1 에서 10 지점까지연속으로이동 투영격자 ( / 4 ) 이동 제 10 지점의제 2 영상획득 제 1 지점내지제 10 지점의 제 3 영상획득 투영격자 ( 2 / 4 ) 이동투영격자 ( 3 / 4 ) 이동 제 10 지점의제 3 영상획득 투영격자 ( 3 / 4 ) 이동 제 10지점에서제 1지점까지연속적으로이동제 10지점내지제 1지점의제 4영상획득 제 10지점의제 4영상획득 투영격자 ( 4 / 4 ) 이동 투영격자 ( 4 / 4 ) 이동 제 1 내지제 4 영상을통해제 10 지점의측정결과산출 ( 종료 ) 54 단계 100 단계 제 1 내지제 10 지점의제 1 내지 제 4 영상으로각지점의 측정결과산출 ( 종료 ) 64
79 표 3.2 라인스캔카메라의장점 - 라인카메라로넓은영역검사시고속측정가능 (Strip, Wafer 검사 ) - 고해상도의영상획득가능 (8~12k) - 넓은 FOV(Field Of View) 커버가능 (10~60mm) - 저가의검사장치 - 여러장의영상들을병합해야하는번거로움해소 (Stitching) 표 3.3 동축모아레측정방법의장점 - 표면반사도가높은제품의측정가능 ( 스틸, 유리, Wafer, LCD) - WSI 어플리케이션에적용가능 - 투명도가높은제품의측정가능 ( 유리, wafer, LCD) - 정밀측정을필요로하는제품의측정가능 (Spatial res. 2~10 μm ) 65
80 Space Performance 표 3.4 라인스캔카메라의스펙 항목 내용 FOV(Field Of View) 스캔거리 20 mm 300 mm X, Y Resolution 3.5 μm Z Resolution Inspection Speed Max Bump Height 0.5 μm 2.5 μm Spatial Resolution: 7 min/300x300 mm 1.5 μm Spatial Resolution: 20 min/300x300 mm 20 ~ 150 μm 표 3.5 영사계에사용된광학부품사양 항목소구경영사렌즈대구경오목거울영사격자카메라 사양 Rodenstock D2 75mm 150mm, NA=1.0 Ronchi-ruling 500 LPI DALSA 8K line scan camera 66
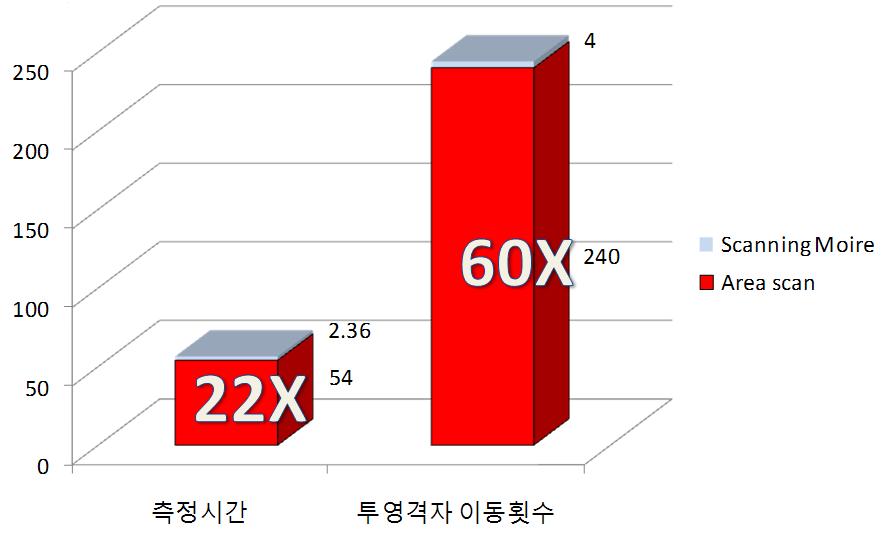
81 3.8 실험및고찰 본절에서는스캐닝모아레방법의성능을평가하기위해서라인스캔카메라 ( 제안한방법 ) 와에어리어카메라 ( 기존의방법 ) 를이용하여실험을하였다. 사용된에어리어카메라는 2k 2k, 15Hz(Frame/sec) 사양이고, 라인스캔카메라는 8k, 60kHz(Line rate) 였다. 격자의구동을위해 PI사의피에조액츄에이터를사용하였고 [38], 에어리어카메라의 FOV이동시간은 0.5초로설정하였다. 우선, 영상획득및투영격자이동횟수의비교그리고측정시간을비교하여성능을분석하였다. 실험결과는표 3.6~3.8과그림 3.14을통해확인할수있다. 아래의결과표와같이본연구의모아레측정방법은동일측정영역에대해기존의측정법에비해약 20배빠른측정결과를얻을수있었으며, 투영격자의이동은 60 배의차이가나는것을알수있다. 본연구는라인스캔카메라를통해모든영역의영상을획득하고, 기존의모아레측정방법에비해투영격자의이동횟수를획기적으로줄일수있으므로, 기존의방법에비해측정시간이매우빠르고측정정밀도도뛰어남을보이고있다. 즉, 제안한스캐닝모아레측정방법은넓은영역의 3차원형상정보를얻는데매우유익하며단 4번의스캔으로얻어진 4장의스캔영상들만으로전영역의 3차원형상복원이가능하여보다빠른속도로 3차원형상정보를얻을수있는효과가있다. 특히본연구는투영격자하나만을사용한영사식모아레방식을이용하여작은높이단차를갖는물체의 3차원형상을복원하고그높이를용이하게측정할수있는장점이있다. 67
82 표 3.6 기존의모아레기법적용데이터 항목 FOV(Field Of View) 영상획득분할영역 내용 mm mm 총 60 개 ( 측정영역 : 72mm 270mm) 투영격자이동횟수총 240 회 ( 영상획득분할영역 60 4) 1 회측정시간 0.9 초 ( 이동및영상획득및측정산출시간포함 ) 전영역에대한측정시간총 54 초 (0.9 초 60) 표 3.7 제안한모아레기법적용데이터 항목 내용 X축 FOV 스캔속도투영격자이동횟수전체영역의 1회스캔시간전영역에대한전체영상획득시간 mm 550.8mm 총 4회 0.59( 동기화시간 0.1초포함, 측정영역 : 72mm 270mm) 2.36초 (0.59초 4) 전영역에대한측정시간 2.7 초미만 ( 영상획득시간 + 계산시간 ) 68
83 표 3.8 기존의방법과제안한방법의측정시간비교 기존의모아레기법스캐닝모아레기법비고 영상캡쳐및 투영격자이동 총 240 번총 4 번 60 배향상 횟수 측정시간 54 초 ( 솔비젼기준 ) 2.36 초 배향상 72mm 270mm 사이즈의제품을기준으로 9µm 의픽셀해상도로측정시 FC CSP 외넓은 FOV 를갖는제품 69

84 (a) 기존의모아레기법적용 (b) 제안한스캐닝모아래기법적용 그림 3.13 성능평가비교 위에서는제안한스캐닝모아레기법의투영격자이동횟수와측정시간에대한성능을비교하였다면, 그림 3.15은측정정밀도에대한결과를보여준다. 결과측정하기위해표 3.9와같은검사항목과표 3.10의테스트조건으로실험을하였다. 그림 3.15의영상은 FC BGA의 Bump를측정한것으로, PSR 과 Bump의단차가뚜렷이나타남에따라정확한 Bump의높이측정이가능할수있다. 그림에서밝은색부분이가장높은위치를의미한다. 70

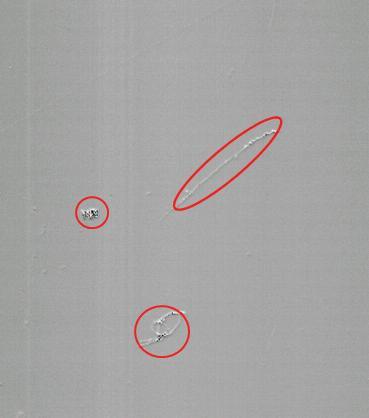
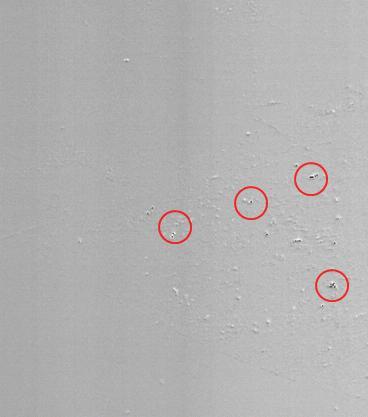
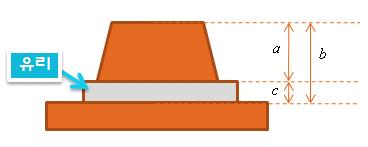
85 그림 3.14 라인스캔카메라를이용한결과 그림 3.16는유리를측정한결과영상로써, 그림안에빨간색원으로표시된부분은유리표면에있던노이즈이다. 보통유리의경우는빛이유리를투과하여측정이힘들다. 만약에대상물체를측정함에있어얇은두께의유리위에대상물체를놓고높이를측정했다면, 유리의높이만큼오차가생기게된다. 그림 3.17이그예를들어설명한것이다. 그림에서보면, 측정해야하는높이가 a임에도불구하고빛이유리를투과하여 b의높이만큼측정을했을경우 c만큼의오차가생기게된다. 하지만, 본연구에서제안한스캐닝모아레측정법에서는유리의표면까지측정이가능하다는것을보여준다. 그림 3.18는기존이모아레기법과제안한스캐닝모아레의성능비교를나타낸다. 71
86 표 3.9 검사항목 항목 내용 Target Device Wafer Gold Bump Solder Bump Missing Bump Damaged Bump 검사항목 Coplanarity Misplacement Discenter 표 3.10 테스트조건 항목 내용 촬영시스템등가파장카메라 XY Resolution Z Resolution 통합시스템 160 μm 8k 고성능라인스캔카메라 3.5 μm 1 μm 72
87 그림 3.15 스캐닝모아레측정법을통해얻어진 3 차원 Glass 영상 그림 3.16 측정의예 73
88 그림 3.17 일반적인모아레법과스캐닝모아레의성능비교 74
89 제 4 장모아레측정장비의설계 본연구는모아레측정장치의테이블이동장치구성에관한것이다. 앞서설명한스캐닝모아레측정방법을통해제품을측정을함에있어, 빠른측정속도로인해측정시간이단축되어도제품의대한결과가좋지않게나올수있다. 이는스캐닝모아레측정방법이제품에대해μm단위로측정하기때문에, 테이블이동장치가이동하면서미세한진동을일으키게된다면측정결과의오차가커지게된다. 본연구에서는측정오차를최소화하기위해다수의에어베어링과보조에어베어링을설치한테이블이동장치를제안한다. 먼저, 장치테이블이동장치에는이동테이블과고정테이블에구비되어있고, 이동테이블을고정테이블의길이방향에따라이동시키면서이동테이블의하단부에에어베어링다수가설치되어지속적으로공급되는공기에의해고정테이블의가이드면과의마찰력을제거하는역할을한다. 그로인해종래이동시 3 개의축 (x축 y축, z축 ) 의변위를최소화하여대상물의측정고정밀도를향상시킬수있고, 가이드면과에어베어링사이의마찰력을제거할수있어이동테이블이이동시흔들림을최소화함에따라대상물의측정오차범위를최소화시킬수있는장치를구성하였다. 모아레측정장비의테이블이동장치는일정간격을이동시키는에어베어링과이동테이블이고정테이블로부터이동한거리를센싱하는센서부, 설정된이동거리에따라이동테이블을이동시키거나센서부의센싱값에의해이동테이 75
90 블을정지시키는구동부와작동을제어하는제어부로이루어진다. 본장에서는 먼저, 4.1 절에서연구의배경에대한설명을하였으며, 4.2 절과 4.3 절에서테이블 이동장치에대한구성에대한내용을설명하였다. 76
91 4.1 개요 반도체산업, 광학산업등의급속한발전으로인한각종초정밀기계의수요가늘어나고있다. 이러한반도체장비, 초정밀가공기기및측정장비등의정밀도를좌우하는요소인직선운동유닛의개발이시급하여이에대한연구개발및기초기술확보가중요한시점에이르게되었다. 또한, 자유곡면형태의 3차원형상을측정하는기술로모아레측정법이라는비접촉식으로측정하는광학식이많이사용되고있는데, 이는 3차원측정기를사용하는접촉식에비해측정시간이월등히단축되는큰장점을가지고있다. 모아레측정법은측정대상물의 3차원형상정보를가지는모아레무늬를얻기위하여측정대상물에일정한간격의직선줄무늬를형성시켜야하고, 이를정밀하게이송시켜야한다. 이와같이대상물을거치시켜이송시키는이송장치나직선운동테이블은전체시스템의정밀도를좌우하는것으로, 높은정밀도를내는직선운동장치의연구가많이진행되고있으며그수요또한많아지고있는추세이다. 현재까지직선운동에사용되는이송축은베어링을주로사용하고있다. 주로직선베어링 (Linear motion bearing) 이거나, 크로스롤러베어링 (Cross roller bearing) 과같은구름베어링이다. 이는상대적으로강성이크고, 마이크로미터정도의정밀도를달성할수있을뿐만아니라, 구현하기도가장쉽기때문이다. 그러나구름베어링은반복적으로동작시안내요소의마모가크고, 단기간에정도가저하되며, 발진, 발열이전체시스템의성능에악영향을주는단점이있다. 77
![또한진공환경에서는대기환경보다마찰저항이커지며, 사용되는윤활제는기체방출의원인이될뿐만아니라, 시간에따라기화되어없어지는문제도발생한다. 생산성측면에서도구름베어링은고속화에적당하지않다 [39].](/docs-images/101/148523157/images/92-0.jpg "대표적인구름베어링직선액츄에이터를그림 4.1에나타내었다. 이구름베어링엑츄직선액츄에이터의정도사양을표4.1에표시하였다. 그림 4.")
92 또한진공환경에서는대기환경보다마찰저항이커지며, 사용되는윤활제는기체방출의원인이될뿐만아니라, 시간에따라기화되어없어지는문제도발생한다. 생산성측면에서도구름베어링은고속화에적당하지않다 [39]. 대표적인구름베어링직선액츄에이터를그림 4.1에나타내었다. 이구름베어링엑츄직선액츄에이터의정도사양을표4.1에표시하였다. 그림 4.1 THK LM 가이드액츄에이터 KR 형의구조 [40] 78
![표 4.1 THK LM 가이드액츄에이터 KR 형의정밀도사양 [40]](/docs-images/101/148523157/images/93-0.jpg "구름베어링에사용되는베어링으로는볼이나롤러베어링이많이사용되고 있으나볼과롤러의탄성변형과불균일등에기인한상하방향의흔들림과")
93 표 4.1 THK LM 가이드액츄에이터 KR 형의정밀도사양 [40] 구름베어링에사용되는베어링으로는볼이나롤러베어링이많이사용되고 있으나볼과롤러의탄성변형과불균일등에기인한상하방향의흔들림과 마찰력에의하여위치정밀도를초정밀급으로하는데에는한계가있다. 따라 79
94 서, 좌우상하운동이 5μm이하의높은정밀도를나타내기위해서는테이블과안내면이접촉되지않도록오일이나공기등의윤활유체를사용하여테이블을지지하는유체베어링이많이사용되고있다. 특히공기베어링으로지지되는테이블의경우강성은다소작으나공기자체의낮은점성으로인해매우작은마찰손실특성을보이며다른방법에비해높은정밀도를얻는데많이적용되고있다 [41]. 그림 4.2는 Ari bearing의동장구조를나타내고, 그림 4.3은공기베어링이사용된테이블이동장치를나타낸그림이다. 공기베어링이사용되는테이블이동장치는고정테이블과이동테이블로구성되며, 고정테이블에는모터에의해회전되면서이동테이블을이동시키는구동부가설치된다. 그리고고정테이블의상단부는평탄도가높은평면으로형성되고, 이평면과공기에의해일정간격으로이격되는공기베어링이이동테이블의하단에설치되어고정테이블과의마찰력을최소화시켜이동테이블을고정밀하게이동시키고있다. 그러나, 이동테이블의가이드면인상단면은평평하게형성되고, 그면을따라이동되는이동테이블이이동시에이동방향 (x축) 외에좌우방향 (y축) 으로흔들리게되어정밀도가저하되는문제점이있다. 이런문제를해결하기위해서가이드돌기와가이드홈을두개이상형성하여좌우방향뒤틀림을방지하고있으나, 이역시상하방향 (z축) 변위는여전히발생되는문제점이있다. 이는공기베어링과고정테이블의가이드면과의간격이 0.05μm이격되기위해압축공기가지속적으로공급되기때문에, 대상물측정을위해이동테이블의이동시상하방향으로 0.05μm의오차범위가발생되는것을나타낸것이다. 80

95 그림 4.2 Air bearing 의동작구조 그림 4.3 공기베어링이사용된테이블이동장치 81
96 4.2 테이블이동장치의적용 본연구는위와같은문제점들을해결하기위해광원이조사된투영격자의그림자를이용하여이동테이블에놓여진대상물체에영상을영사시킨후, 라인스캔카메라에의해영사된영상을위상에따라촬영하고스캐닝하여획득한영상들을이용하여모아레무늬를해석하고대상물체의 3차원형상을분석한다. 그림 4.4는제안하는모아레측정장비의테이블이동장치의그림으로다수의셀이대상물의이송방향과평면상직각방향으로배열된모아레측정장치로이동테이블의하측에위치하는라인스캔카메라, 상단면중앙부가길이방향을따라형성되는설치홈, 그양측에는양단으로갈수록하향경사진가이드면이형성된고정테이블, 이동테이블을고정테이블의길이방향에따라이동시키는구동부, 이동테이블의하단부에설치되어지속적으로공기를공급하여고정테이블의가이드면과의마찰력을최소화시키는에어베어링, 이동테이블이고정테이블로부터이동한거리를센싱하는센서부그리고센서부의센싱값에의해이동테이블을정지시키도록구동부의작동을제어하는제어부를포함하여이루어진다. 고정테이블의가이드면은 40 ~ 50 의경사각도로이루어진다. 또한, 구동부는고정테이블의설치홈양단부에각각설치되는한쌍의고정브라켓, 양단부가회전가능하도록설치되어외주면을따라나사산이형성된회전봉, 고정브라켓중어느하나에고정되어회전봉을회전시키는구동모터를포함하여이루어진다. 에어베어링은원기둥형상의베어링몸체, 그중심을따라통공되 82
97 어공기가공급되는공기공급관, 베어링몸체의하단면에적어도하나이상형성되는동심원을갖는공기정체로, 공기공급관에서공급된공기가공기정체로로이동되도록다수의공기이동로를포함하여이루어지고, 공기공급관을통해공급된공기가공기이동로와공기정체로를거쳐고정테이블의가이드면과인접한상기베어링몸체의하단면외측으로배출되면서에어베어링이가이드면과의사이에마찰력을최소화시켜주는역할을한다. 센서부는고정테이블의측면길이방향을따라광을반사하는눈금과광을흡수하는눈금이반복구비된센싱눈금과광을조사하여반사되는광을센싱하여이동테이블의이동거리를측정한후제어부로전송하는센서를포함하여이루어진다. 제어부는이동거리가기설정된이동테이블의이동시일정시간동안이동속도가증가하여최고속도에도달하는구간과일정시간동안최고속도에서정지하도록이동속도가감소하는구간및일정시간동안최고속도를유지하는구간으로구획되어이동테이블이이동되도록구동부를제어한다. 이동테이블의근처에는고정테이블이고정되는평평한고정면과의사이에보조에어베어링이구비되어지속적으로공급되는공기에의해마찰력을최소화시키는역할을한다. 이동장치는두개로이루어지며, 하나의이동장치의이동테이블에다른이동테이블의고정테이블을수평직각방향으로고정시켜 x축과 y축으로고정밀도측정대상물을이동시킨다. 이로인해기존의이동시이동방향 (x축) 이나좌우방향 (y축) 의뒤틀림은물론, 상하방향 (z축) 의변위를최소화하여대상물의측정고정밀도를향상시킬수있다. 또한, 지속적으로공급되는공기에의해고정테이 83
98 블의가이드면과에어베어링사이의마찰력을최소화할수있어이동테이블 의이동시흔들림이최소화됨에따라대상물의측정오차범위를최소화시킬 수있어작업의효율성을향상시킬수있는장점을가지고있다. 그림 4.4 제안하는모아레측정장치의테이블이동장치 84
99 4.3 테이블이동장치의설계 이절에서는테이블이동장치의구성및설치에따른실시의예를설명한다. 그림 4.5은제안하는테이블이동장치에대한정면의그림을보여준다. 모아레측정장치의테이블이동장치는고정테이블, 이동테이블, 구동부, 에어베어링, 센서부그리고제어부로구성된다. 고정테이블은평평한고정면에고정되고, 상단면의중앙부에길이방향을따라등폭의설치홈이형성되며, 이설치홈의양측에는양단으로갈수록하향경사진가이드면이각각형성된다. 이때, 가이드면의경사각은 40 ~ 50 로형성되면본연구에서는 45 로설정하였다. 이동테이블은고정밀도측정대상물이상단에거치되는것으로고정테이블의상측에위치하여구동부에의해고정테이블의길이방향을따라이동하게된다. 구동부는고정테이블과이동테이블사이에구비되는것으로고정테이블의설치홈에설치되어이동테이블을이동시키게된다. 이구동부는고정브라켓과회전봉및구동모터로구성되며, 고정브라켓은한쌍으로구비되어고정테이블의설치홈양단부에고정된다. 85
100 그림 4.5 테이블이동장치의정면 에어베어링은이동테이블에다수가설치되는것으로공급되는압축공기를지속적으로공급하여고정테이블과일정간격이격되도록이동테이블을유지시키게된다. 즉, 에어베어링은그림 4.6와같이고정테이블의가이드면과수직방향으로위치되도록구동부에의해고정테이블에연결되는이동테이블의양측단부에구비되는것이다. 에어베어링은지속적으로공급되는압축공기에의해이동테이블의이동시발생되는가이드면과에어베어링하단면사이의마찰력을최소화시켜이동방향 (x축) 외의방향 (y축및 z축 ) 으로이동테이블이변위되는것을최소화 86
101 시킴에따라이동테이블을고정밀이동시킬수있게된다. 예를들어, 공급되는압축공기가 0.05μm로공급될경우에에어베어링과가이드면사이간격이 0.05 μm로이격되나좌우방향 (y축: XA) 과상하방향 (z축: XB) 의변위는식 (4.1) 과같다., (4.1) 식 (4.18) 에의해 μm로변경됨에따라변위오차가감소됨을알수있 다. 에어베어링은고정테이블의양가이드면에구비됨에따라양가이드면에 발생되는오차범위가상호상쇄되어오차범위는더욱축소된다. 그림 4.6 테이블이동장치의측면 87
102 그림 4.7는에어베어링을표현한것으로, 베어링몸체와공기공급관및공기정체로와공기이동로로구성되며베어링몸체는원기둥형상으로이루어져중심부에공기공급관이통공된다. 베어링몸체하단면에는베어링몸체및공기공급관과동심원을갖는공기정체로가적어도하나이상형성되고, 공기이동로는공기공급관을따라공급된압축공기가공기정체로로이동되도록다수가형성된다. 에어베어링의작동을살펴보면, 고정테이블의가이드면과일정간격이격되어위치된에어베어링에압축된공기가공기공급관을통해공급되고대면하는가이드면에의해베어링몸체하단면과가이드면사이틈을따라이동된다. 이동된압축공기는공기이동로를거쳐공기정체로로이동되고, 과공급된압축공기는공기정체로를넘어베어링몸체외측으로배출되면서에어베어링과가이드면사이마찰력을최소화시킨다. 88
103 그림 4.7 테이블이동장치의에어베어링 센서부는구동부에의한이동테이블의이동거리를센싱하는것으로, 기설정된이동거리에따라제어부가구동부의구동모터를작동시켜회전봉을일정횟수회전시켜이동테이블을이동시킨다. 그리고이동케이블의이동된거리를센서부가센싱하여제어부로전송함에따라기설정된이동거리와비교하여동일하게이동한것인지확인하게되며, 센서부의센싱값에따라제어부가구동부를제어하면서고정밀도이동이가능하게된다. 이러한센서부는센서와센싱눈 89
104 금으로구성되고센싱눈금은고정테이블의수직측면에길이방향을따라형성되는것으로광을반사하는눈금과광을흡수하는눈금이일정간격반복형성된다. 센서는이동테이블에구비되어센싱눈금에광을조사하여반사되는광을센싱하여제어부로전송하는역할을하며, 전송되는펄스형식의센싱값에의해이동테이블의이동거리를측정하게된다. 제어부는그림 4.8에서보여지는것과같이이동테이블의이동시, 기설정된이동거리에따라속도증가구간 (L1) 과속도유지구간 (L2) 및속도감소구간 (L3) 으로구획하여이동시키게된다. 이는이동테이블의이동전측정거리에따라제어부에서미리연산하여구동부를제어함에따라안정된최적의속도로이동테이블을이동시킬수있어고정밀도측정이이루어지는것이다. 이동테이블의일측에는보조에어베어링이구비되어이동테이블의이동시고정테이블이고정되는평평한고정면과의사이에발생되는마찰력을최소화시켜이동테이블의고정밀이동을보조한다. 이보조에어베어링은에어베어링과동일한구성으로이루어진다. 90
105 그림 4.8 테이블이동장치의이동구간에따른속도제어그래프 모아레측정장치의테이블이동장치는보조센서부가더구비되는것으로, 고정테이블설치홈의내측면과이동테이블중앙부에구비되어이동테이블의이동거리를측정하게된다. 다시말해, 고정테이블설치홈의내측면에는보조센싱눈금이광을반사하는눈금과광을흡수하는눈금이길이방향을따라일정간격반복형성되고, 이동테이블중앙부에는보조센서가구비되어보조센싱눈금에조사되는광을센싱하여제어부로전송하게된다. 보조센서부는센서부와동일하게제어부에센싱값을전송하여이동테이블의이동거리를센싱하게된다. 이때, 보조센서부는구동부를기준으로센서부가설치된이동테이블의반대위치에구비되어구동부를기준으로이동테이블의양측이동거리를각각센싱하여이동테이블의좌우방향 (y축) 오차를센싱하고, 이오차범위를최종측정된대상물의측정값에대응하여고정밀도가측정된 91
106 다. 위와같이구성된모아레측정장치의테이블이동장치는그림 4.9에서도시된바와같이두개로이루어지며, 하나의이동장치의이동테이블에다른이동테이블의고정테이블을직각방향으로고정시켜 x축과 y축으로고정밀도측정대상물을이동시킬수있다. 그림 4.9 테이블이동장치의설치에따른실시예. 92
107 제 5 장시스템통합및성능평가 5.1 개요 본장에서는앞서제안된대구경오목거울과라인스캔카메라그리고고정밀도의이송테이블을적용통합하여 Wafer나 FC-BGA의 Bump를측정하는시스템을구성하고, 통합시스템의성능을평가한다. 그림 5.1은통합시스템의구성도를나타내고있다. 구성을살펴보면, 다수의에어베어링이설치된테이블이동장치를통해대상물체의흔들림을최소화하고, 라인스캔카메라를이용해전영역의영상을획득시오목거울을사용하여제품표면의윤곽에따른음영을제거하여영상을획득하게된다. 그로인해통합시스템은위에서설명한연구들을통해대상물체의 3차원영상을빠르고정확하게얻을수있다. 3차원영상을얻음으로써, 대상물체에대한높이또한측정이가능하다. 본연구를통해넓은영역을가진 Coining 제품과 Non-coining 제품의정확한높이를빠르게측정할수있었다. 통합시스템을이용하여얻은실험결과는 5.2절에서설명한다. 93

108 그림 5.1 통합시스템구성도 94
109 5.2 실험및고찰 본절에서는통합시스템의성능을평가하기위해첫번째는 Coining 제품과 Non-coining 제품의대한 Bump의높이측정의가능성여부를검증하였고, 두번째는동일한 Wafer의 Bump 높이를반복해서측정하는반복성에대한실험을하였다. 첫번째실험을위해표 5.1의광학현미경을이용하여 Coining 제품과 Noncoining 제품의영상을분석하였고, 표 5.2의테스트조건에맞게실험하였다. 그림 5.2와 5.3은각각광학현미경을이용하여 Coining 제품과 Non-coining 제품을촬영한것이다. 초점별로촬영하여영상의변화를살펴보았다. 그림 5.4는광학현미경으로 2차원영상을찍은것으로써, 초점에따라보여지는영상의차이를보여준다. 그림 5.5는광학현미경을이용해측정한 Coining 제품과 Non-coining 제품의 Bump 높이를나타낸것이다. 표 5.1 실험에사용한광학현미경 항목내용 촬영시스템 배율 Olympus BX51 현미경 X20 95
110 표 5.2 테스트조건 항목내용 측정시스템등가파장카메라 X Resolution Z Resolution 통합시스템약 200μm 8k 라인스캔카메라 2.5μm 1μm 96
 Bump")

111 (a) PSR 에초점을맞춘영상 (b) PSR 과 Bump 사이의초점을 맞춘영상 (c) Bump 에초점을맞춘영상 (d) 병합된영상 (a+b+c) 그림 5.2 광학현미경을이용한 Coining 제품의영상 97
")

")

112 (a) PSR 에초점을맞춘영상 (b) PSR 과 Bump 사이의초점을 맞춘영상 (c) Bump 에초점을맞춘영상 (d) 병합된영상 (a+b+c) 그림 5.3 광학현미경을이용한 Non-coining 제품의영상 98



113 (a) Bottom bump 에초점을맞춘영상 (b) Top bump 에초점을맞춘영상 (c) 원영상 그림 5.4 광학현미경으로찍은 2 차원영상 99
114 그림 5.5 광학현미경을이용해측정한 Bump 의높이 그림 5.6과 5.7은각각 Coining 제품과 Non-coining 제품의일부분을보여준다. 그림 5.6과같이 Coining 제품의경우는 PSR과 Bump의단차가뚜렷이나타나는것을확인할수있었다. Bump의왼쪽끝을보면, 그림자에따른영향으로보이는에러가존재하였으나높이를측정하기에는큰무리가없어보인다. 그러므로, Coining 제품에대한 Bump의높이측정은가능하다. 하지만, 그림 5.7 에나타난바와같이 Non-coining 제품의경우는 Bump의표면이매끄럽지못하며, Bump의윤곽은나타나지만다소뭉그러지는듯한결과를보이고있다. 100


115 그림 5.6 Coining 제품의결과영상 101


116 그림 5.7 Non-coining 제품의결과영상 그림 5.8과그림 5.9의결과를통해통합시스템을이용하여 Coining 제품과 Non-coining 제품의 Bump 높이측정의가능성여부를살펴보았다. Coining 제품은그림 5.4에서보여지는바와같이평평한면을이루고있어, Bump의높이를쉽게측정할수있다. 하지만, Non-coining 제품은그림 5.4와같이대상물체가둥글게되어있어빛이비추는방향에영향을받는다. PSR과 Bump의단차가존재하지만 Profile은좋지않다. 특히 x축 Profile이 y축 Profile에비해좋지 102
117 않게나타나고있으며, 전체적으로 Bump의왼쪽부분이주저앉아있는것처럼보인다. 통합시스템을통해 Non-coining 제품의 Bump 높이를측정하는것은가능하지만, Coining 제품과동일한결과를얻기위해선연구가더필요하다. 그림 5.10은라인스캔모아레방법을이용하여얻은결과물로써, 3차원 Wafer 영상의측정결과를나타낸다. 밝은색을띠는 Bump 부분이다른부분에비해높다는것을의미한다. 그림 5.11은 Bump를확대한영상이다. Bump에서도 Top bump와 Bottom bump로나뉘는데, Top bump의색이가장밝아가장높은위치에있음을그림을통해알수있다. 103


118 그림 5.8 Coining 제품의 Profile 104

119 그림 5.9 Non-coining 제품의 Profile 105

120 그림 차원 Wafer 영상측정결과 106

121 그림 차원 Wafer 확대영상 107
122 두번째실험은반복성에대한테스트로써, 대상물체인 Wafer의 Bump 8개를측정하되, 총 10회반복하여동일한위치의 Bump의높이인단차를측정하였다. 여기서, 단차란 Bump에서가장높은위치와표면과의높이의차를말한다. 즉, 단차는평균 Gray level 값을말한다. 실험전 1μm를 2 Gray level 값으로세팅을하였기때문에 1회의첫번째단차의평균밝기는 49.67μm의 2배값이 Gray level 값을갖게된다. 그림 5.12와표 5.3은각각통합시스템의반복성을측정한결과와테스트횟수마다의평균값과단차높이의측정결과를보여준다. 측정결과를보면 10 회반복시에도단차높이의변화가심하지않고평균치에 ±1μm의차이를보이는것을알수있다. 표준편차는최소 0.9μm최대 1.5μm로측정되어반복성이우 수함을알수있다. 108
123 통합시스템의반복성 그림 5.12 통합시스템의반복성결과 109
124 표 5.3 반복성테스트의평균및표준편차결과 평균 ( μm ) 표준편차 ( μm ) 단차높이 ( μm ) 1 번째 Bump 번째 Bump 번째 Bump 번째 Bump 번째 Bump 번째 Bump 번째 Bump 번째 Bump 번째 Bump 번째 Bump
125 제 6 장결론 본논문에서는모아레무늬획득방법및이를이용한대상물체의높이측정방법을개선하기위해아래와같은새로운방법들을제안하였다. 2장에서는오목거울을이용한영상획득방법에대해제안하여표면반사도가높고표면의굴곡이있는대상물을측정할때측정정밀도와 SNR을개선할수있는방안을제안하였다. 비싼가격으로인해사용이쉽지않지만성능이좋은대구경렌즈와같은성능을얻기수있는방법을제안하였다. 성능평가를위해 NA값에따른영상의품질을비교하고, 대구경렌즈와소구경렌즈를각각사용했을때의영상의차이를비교하여, 오목거울을배치하였을때와배치하지않았을때의영상의차이를비교하였다. 그결과, 소구경렌즈에오목거울을배치했을때와대구경렌즈를사용했을때의성능이동일하다는것을알수있었다. 3장에서는모아레현상과 3차원복원기술에대한정의및일반적인내용에대해설명하고, 라인스캔모아레측정방법을제안하였다. 제안하는라인스캔모아레측정방법에서는라인스캔카메라를이용하여연속적인영상을획득함으로써측정시간을획기적으로단축시킬수있었다. 기존의방법과제안하는라인스캔모아레측정방법의성능평가를위하여동일한제품에대해평가를수행하였다. 측정결과, 측정속도는약 20배정도빠름을알수있었고, 투영격자의이동횟수도 60배정도의차이가나므로 60배의수명향상 111
126 이나타나는것을알수있었다. 모아레측정방법에서시간이많이소요되는단계는투영격자를기계적으로이송하는단계이므로모든면을고려하면, 라인스캔모아레측정방법의성능이우수하다는것을확인할수있다. 4장에서는 3장에서제안한스캐닝모아레측정법을구현할수있도록고정도의반복성을갖는테이블이동장치의구성에대해제안하였다. 3차원측정시진동등으로인한측정높이오차는그측정결과에직접적으로영향을미치게된다. 제안하는테이블이동장치는기존의장치에비해가이드면과에어베어링사이의마찰력을제거할수있어이동테이블의이동시흔들림이최소화됨에따라대상물의측정오차범위도 (36nm 이하 ) 최소화시킬수있다. 정밀도이동장치에대한구성을제안하여실험을통한결과는 5장통합시스템의결과를통해확인할수있다. 5장에서는앞장에서제안한연구들을접목시켜통합시스템을제안하였다. 시스템에대한구성도와내용그리고실험결과에대해서술하였다. 대상물체에대해스캐닝모아레측정법을적용하여 Coining 제품과 Non-coining 제품의결과비교를하였고, Wafer와 Glass의 3차원영상을통해연구에서제안한방법의성능이우수함을증명하였다. 본논문은세계최초로라인스캔카메라와대구경렌즈를이용한고속 Projection Moiré 측정방법을제안함으로써기존의모아레방식에서는격면반사로인해측정이불가능하던대상물의측정이가능하게되었고, 그연구결과는 Wafer, PCB, LCD glass등大면적대상물의 3차원양산검사기술개발에활용될수있을것으로기대된다. 112
127 참고문헌 [1] 정문식, " 모아레기법을이용한인체형상의삼차원측정," 박사학위논문, KAIST, 2001 [2] M. ishihara, H. sasaki, "High-speed surface measurement using a nonscanning multiple-beam confocal microscope," Society of Photo-Optical Instrumentation Engineers, 1999 [3] E. A. Stout, N. R. Sottos, and A. F. Skipor, Mechanical characterization of plastic Ball Grid Array package flexure using Moire interferometry, IEEE transactions on advanced packaging, Vol 23, No.4 November [4] L. Z. Cai, Q. Liu and X. L. Yang, Effects of measurement errors on both the amplitude and the phase reconstruction in phase-shifting interferometry:a systematic analysis, Journal of modern optics, [5] H. H. Meng, O. K. Eng, W. E. Hua and L. T. Beng, Application of Moire interferometry in Electronics Packaging, 1997 IEEE/CPMT Electronic Packaging Technology Conference. [6] Y. Wang and P. Hassel, Measurement of thermally induced warpage of BGA packages/substrates using phase stepping shadow Moiré, 1997 IEEE/CPMT Electronic packaging technology conference. [7] C. A. Walker, A Historical Review of Moiré Interferometry, Experimental Mechanics, [8] D. M. Meadows, W. O. Johnson, and J. B. Allen, Generation of Surface Contours by Moiré Patters, Applied Optics, Vol. 9, No. 4, pp , [9] 최이배, 위상천이모아레토모그라피를이용한 3차원물체의미세형상측정, 박사학위논문, KAIST, [10] 솔비젼인코포레이티드, " 물체의기복을측정하기위한방법및시스템," 대한민국특허청, 특 , [11] 인텍플러스, " 모아레무늬발생기를적용한위상천이영사식모아레방법및장치," 대안만국특허청특 , [12] B. Curless, Siggraph 2000 Courses on 3D Photography, Siggraph 2000, New 113
128 Orleans, Louisiana, July [13] D. Malacara, M. Servin, and Z. Malacara, Interferogram Analysis for Optical Testing : second edition, Taylor & Francis, [14] C. A. Sciammarella, The moiré method A Review, Experimental Mechanics, 1982 [15] 추정우, 박지영, 김호원, 박정철, 임성재, 구본기, 3차원복원기술동향, 전자통신동향분석, Vol. 22, No. 4, [16] C. L. Koliopoulos, "Interferometric optical measurement techniques," Ph. D. Dissertation, Optical Sciences Center, U. Arizona, [17] K. Creath, "Phase-Measurement Interferometry Techniques," Progress in Optics 26, , [18] K. G. Larkin, J. opt. Soc. Am. A, 13, 832, [19] H. Takasaki, Moire Topography, Apple. Opt., Vol9, No.6, pp , [20] H. Takasaki, Moire Topography, Applied Optics, Vol. 9, No. 6, [21] Takeda, Fringe formula for projection type moiré topography, Optics and Lasers in Engineering, Vol. 3, No. 1, pp , [22] E. Hecht, OPTICS : fourth edition, Addition Wesley, [23] M. Idesawa, T. Yatagai, and T. Soma, Scanning moiré method and automatic measurement of 3-D shapes, Applied Optics, Vol. 16, No. 8, [24] M. Halioua, R. S. Krishnamurthy, H. Liu, and F. P. Chiang, Projection Moiré with moving gratings for automated 3-D topography, Applied Optics, Vol. 22, No. 6, [25] T. Matsumoto, Y. Kitagawa, M. Adachi, and A. Hayashi, Moiré topography for three-dimensional profile measurement using the interference fringes of a laser, Optical Engineering, Vol. 31, No. 12, [26] Y. Y. Cheng and J. C. Wyant, Multiple-wavelength phase-shifting interferometry, Applied optics, Vol. 24, No. 6, [27] K. creath, Y. Y. Cheng and J. C. Wyant, Contouring aspheric surfaces using twowavelength phase-shifting interferometry, Optica acta, Vol 32, No. 12, , [28] X. Xie, J. T. Atkinson, M. J. Lalor, and D. R. Burton, Three-map absolute moiré 114
129 contouring, Applied Optics, Vol. 35, No. 35, [29] P. Hariharan, Basics of Interferometry : second edition, Academic Press, [30] P. Hariharan, Optical Interferometry : second edition, ELSEVIER Academic press, [31] J. Paakkari, On-line flatness measurement of large steel plates using moiré topography, Dissertation for the degree of Doctor, Technical research centre of Finland ESPOO, [32] J. Schwider, R. Burow, K. E. Elssner,, J. Grzanna, R. Spolaczyk, and K. Merkel, Digital wave-front measuring interferometry:some systematic error sources, Applied Optics, 22, , [33] L. Creath, Prog. Optics, 26, 349, [34] P. carré, Installation et utilization du comparateur photoelectrique et Interferentiel du Bureau International des Poids et Mesures, Metrologia 2, 13-23, [35] K. Creath, Phase-measurement Interferometry technique, Progress in optics, Vol. 26, pp , [36] 김승우, 최이배, 오정택, 정문식, 위상천이격자를이용한영사식모아레, 한국기계학회논문집 A권, 22권, 5호, pp , 김승우, 오정택, 정문식, 최이배, 고단차불연속형상의 3차원측정을위한이중파장위상천이영사식무아레, 한국기계학회논문집, [37] The world of micro- and nanopositioning 2005/2006, Physik Instrumente(PI) GmbH & Co. KG [38] 김경호, " 진공환경용공기베어링의설계및성능평가," 박사학위논문, KAIST, 2005 [39] [40] 115
(2002).hwp
.hwp") 工學碩士學位論文 광대역육각형평판모노폴안테나 A Wideband Hexagonal Plate Monopole Antenna 忠北大學校大學院 電波工學科電波通信工學專攻 李相吉 2006 年 2 月 工學碩士學位論文 광대역육각형평판모노폴안테나 A Wideband Hexagonal Plate Monopole Antenna 指導敎授 安炳哲 電波工學科電波通信工學專攻 李相吉
工學碩士學位論文 광대역육각형평판모노폴안테나 A Wideband Hexagonal Plate Monopole Antenna 忠北大學校大學院 電波工學科電波通信工學專攻 李相吉 2006 年 2 月 工學碩士學位論文 광대역육각형평판모노폴안테나 A Wideband Hexagonal Plate Monopole Antenna 指導敎授 安炳哲 電波工學科電波通信工學專攻 李相吉
< 목차 > Ⅰ. 연구동기 1 Ⅱ. 연구목적 1 Ⅲ. 연구내용 2 1. 이론적배경 2 (1) 직접제작한물질의기본구조 2 (2) 회절격자의이론적배경 3 (3) X-선회절법-XRD(X-Ray Diffraction) 3 (4) 브래그의법칙 (Bragg`s law) 4 (5)
 직접제작한물질의기본구조 2 (2) 회절격자의이론적배경 3 (3) X-선회절법-XRD(X-Ray Diffraction) 3 (4) 브래그의법칙 (Bragg`s law) 4 (5)") [ 첨부 4] 작품설명서표지서식 작품번호 1143 LASER 의라우에패턴을통한입체모형의구조분석 출품분야물리출품부문학생 2011. 7. 7 구분성명 출품학생 지도교사 김성현 권채련 김서연 전종술 - 1 - < 목차 > Ⅰ. 연구동기 1 Ⅱ. 연구목적 1 Ⅲ. 연구내용 2 1. 이론적배경 2 (1) 직접제작한물질의기본구조 2 (2) 회절격자의이론적배경 3 (3)
[ 첨부 4] 작품설명서표지서식 작품번호 1143 LASER 의라우에패턴을통한입체모형의구조분석 출품분야물리출품부문학생 2011. 7. 7 구분성명 출품학생 지도교사 김성현 권채련 김서연 전종술 - 1 - < 목차 > Ⅰ. 연구동기 1 Ⅱ. 연구목적 1 Ⅲ. 연구내용 2 1. 이론적배경 2 (1) 직접제작한물질의기본구조 2 (2) 회절격자의이론적배경 3 (3)
저작자표시 - 비영리 - 동일조건변경허락 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비
 저작자표시 - 비영리 - 동일조건변경허락 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 동일조건변경허락. 귀하가이저작물을개작, 변형또는가공했을경우에는,
저작자표시 - 비영리 - 동일조건변경허락 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 동일조건변경허락. 귀하가이저작물을개작, 변형또는가공했을경우에는,
untitled
 전방향카메라와자율이동로봇 2006. 12. 7. 특허청전기전자심사본부유비쿼터스심사팀 장기정 전방향카메라와자율이동로봇 1 Omnidirectional Cameras 전방향카메라와자율이동로봇 2 With Fisheye Lens 전방향카메라와자율이동로봇 3 With Multiple Cameras 전방향카메라와자율이동로봇 4 With Mirrors 전방향카메라와자율이동로봇
전방향카메라와자율이동로봇 2006. 12. 7. 특허청전기전자심사본부유비쿼터스심사팀 장기정 전방향카메라와자율이동로봇 1 Omnidirectional Cameras 전방향카메라와자율이동로봇 2 With Fisheye Lens 전방향카메라와자율이동로봇 3 With Multiple Cameras 전방향카메라와자율이동로봇 4 With Mirrors 전방향카메라와자율이동로봇
실험 5
 실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
실험. OP Amp 의기초회로 Inverting Amplifier OP amp 를이용한아래와같은 inverting amplifier 회로를고려해본다. ( 그림 ) Inverting amplifier 위의회로에서 OP amp의 입력단자는 + 입력단자와동일한그라운드전압, 즉 0V를유지한다. 또한 OP amp 입력단자로흘러들어가는전류는 0 이므로, 저항에흐르는전류는다음과같다.
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
(b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로
 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로") Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
Lab. 1. I-V Characteristics of a Diode Lab. 6. 연산증폭기가산기, 미분기, 적분기회로 1. 실험목표 연산증폭기를이용한가산기, 미분기및적분기회로를구성, 측정및 평가해서연산증폭기연산응용회로를이해 2. 실험회로 A. 연산증폭기연산응용회로 (a) 가산기 (b) 미분기 (c) 적분기 그림 6.1. 연산증폭기연산응용회로 3. 실험장비및부품리스트
LIDAR와 영상 Data Fusion에 의한 건물 자동추출
 i ii iii iv v vi vii 1 2 3 4 Image Processing Image Pyramid Edge Detection Epipolar Image Image Matching LIDAR + Photo Cross correlation Least Squares Epipolar Line Matching Low Level High Level Space
i ii iii iv v vi vii 1 2 3 4 Image Processing Image Pyramid Edge Detection Epipolar Image Image Matching LIDAR + Photo Cross correlation Least Squares Epipolar Line Matching Low Level High Level Space
High Resolution Disparity Map Generation Using TOF Depth Camera In this paper, we propose a high-resolution disparity map generation method using a lo
 High Resolution Disparity Map Generation Using TOF Depth Camera In this paper, we propose a high-resolution disparity map generation method using a low-resolution Time-Of- Flight (TOF) depth camera and
High Resolution Disparity Map Generation Using TOF Depth Camera In this paper, we propose a high-resolution disparity map generation method using a low-resolution Time-Of- Flight (TOF) depth camera and
 *) α ρ : 0.7 0.5 0.5 0.7 0.5 0.5-1 - 1 - - 0.7 (**) 0.5 0.5-1 - (**) Max i e i Max 1 =150 kg e 1 = 50 g xxx.050 kg xxx.050 kg xxx.05 kg xxx.05 kg Max 2=300 kg
*) α ρ : 0.7 0.5 0.5 0.7 0.5 0.5-1 - 1 - - 0.7 (**) 0.5 0.5-1 - (**) Max i e i Max 1 =150 kg e 1 = 50 g xxx.050 kg xxx.050 kg xxx.05 kg xxx.05 kg Max 2=300 kg
. 0.. Planck : sec : sec : : m in radian m in ln sec 심장 발 기압
 . 0.. Planck : sec : sec : : sec sec A . 0.. Planck : sec : sec : : m in radian m in ln sec 심장 발 기압 . 0. sec π . 0.. Planck : sec : sec : : sec sec sec sec . 0.. Planck : sec : sec : : m p = 1u=931.5 MeV
. 0.. Planck : sec : sec : : sec sec A . 0.. Planck : sec : sec : : m in radian m in ln sec 심장 발 기압 . 0. sec π . 0.. Planck : sec : sec : : sec sec sec sec . 0.. Planck : sec : sec : : m p = 1u=931.5 MeV
(Microsoft PowerPoint - \301\24608\260\255 - \261\244\277\370\260\372 \300\347\301\372)
") 게임엔진 제 8 강광원과재질 이대현교수 한국산업기술대학교게임공학과 학습목차 조명모델 광원의색상설정 재질 분산성분의이해 분산재질의구현 경반사성분의이해 경반사재질의구현 조명 (Illumination) 모델 조명모델 광원으로부터공간상의점들까지의조도를계산하는방법. 직접조명과전역조명 직접조명 (direct illumination) 모델 물체표면의점들이장면내의모든광원들로부터직접적으로받는빛만을고려.
게임엔진 제 8 강광원과재질 이대현교수 한국산업기술대학교게임공학과 학습목차 조명모델 광원의색상설정 재질 분산성분의이해 분산재질의구현 경반사성분의이해 경반사재질의구현 조명 (Illumination) 모델 조명모델 광원으로부터공간상의점들까지의조도를계산하는방법. 직접조명과전역조명 직접조명 (direct illumination) 모델 물체표면의점들이장면내의모든광원들로부터직접적으로받는빛만을고려.
<33312DBFB5BBF3C3B3B8AE20B9D720B1D7B7A1C7C8BDBA2DC1B6C5C2C8C62E687770>
 Journal of the Korea Institute of Information and Communication Engineering FTP 를이용한이중파장법에의한 3 차원형상측정 구자명 1 조태훈 2* A 3D measurement system based on a double frequency method using Fourier transform profilometry
Journal of the Korea Institute of Information and Communication Engineering FTP 를이용한이중파장법에의한 3 차원형상측정 구자명 1 조태훈 2* A 3D measurement system based on a double frequency method using Fourier transform profilometry
KMC.xlsm
 제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
제 7 장. /S 에필요한내용 1] IGBT 취급시주의사항 ) IGBT 취급시주의 1) 운반도중에는 Carbon Cross로 G-E를단락시킵니다. 2) 정전기가발생할수있으므로손으로 G-E 및주단자를만지지마십시요. 3) G-E 단자를개방시킨상태에서직류전원을인가하지마십시요. (IGBT 파손됨 ) 4) IGBT 조립시에는사용기기나인체를접지시키십시요. G2 E2 E1
19_9_767.hwp
 (Regular Paper) 19 6, 2014 11 (JBE Vol. 19, No. 6, November 2014) http://dx.doi.org/10.5909/jbe.2014.19.6.866 ISSN 2287-9137 (Online) ISSN 1226-7953 (Print) RGB-Depth - a), a), b), a) Real-Virtual Fusion
(Regular Paper) 19 6, 2014 11 (JBE Vol. 19, No. 6, November 2014) http://dx.doi.org/10.5909/jbe.2014.19.6.866 ISSN 2287-9137 (Online) ISSN 1226-7953 (Print) RGB-Depth - a), a), b), a) Real-Virtual Fusion
Microsoft Word _ _614_ 이혁교
 한국정밀공학회지제 3 권 7 호 pp. 605-63 J. Korean Soc. Precis. Eng., Vol. 3, No. 7, pp. 605-63 ISSN 5-907(Print), ISSN 87-8769(Online) July 04 / 605 http://dx.doi.org/0.7736/kspe.04.3.7.605 자유곡면형상측정을위한백색광주사간섭계의정확도향상및시스템오차분석
한국정밀공학회지제 3 권 7 호 pp. 605-63 J. Korean Soc. Precis. Eng., Vol. 3, No. 7, pp. 605-63 ISSN 5-907(Print), ISSN 87-8769(Online) July 04 / 605 http://dx.doi.org/0.7736/kspe.04.3.7.605 자유곡면형상측정을위한백색광주사간섭계의정확도향상및시스템오차분석
Microsoft PowerPoint - XD Laser Interferometer.ppt
 Interferometer Automated Precision Inc. 1987 년설립 (Rockville, MD, USA) 기존 Laser 측정장비와차별화된 Laser Measurement System 과 Control System 연구개발 Machine Tools 과 CMM 장비를위한 5/6D Laser Measurement System 개발 새로운방식의
Interferometer Automated Precision Inc. 1987 년설립 (Rockville, MD, USA) 기존 Laser 측정장비와차별화된 Laser Measurement System 과 Control System 연구개발 Machine Tools 과 CMM 장비를위한 5/6D Laser Measurement System 개발 새로운방식의
1
 1 2 3 4 5 6 b b t P A S M T U s 7 m P P 8 t P A S M T U s 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 Chapter 1 29 1 2 3 4 18 17 16 15 5 6 7 8 9 14 13 12 11 10 1 2 3 4 5 9 10 11 12 13 14 15
1 2 3 4 5 6 b b t P A S M T U s 7 m P P 8 t P A S M T U s 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 Chapter 1 29 1 2 3 4 18 17 16 15 5 6 7 8 9 14 13 12 11 10 1 2 3 4 5 9 10 11 12 13 14 15
제49회 부산과학전람회
 작품번호 1507 출품분야학생부출품부문지구과학 2012. 07. 10 구분성명 출품학생 지도교사 윤정관 이경훈 그림 1> 전세계광해분포지도 (Globe at Night 포스터 ) - 1 - 그림 2> 우리나라의광해분포지도 (Cinzano et al., 2001) - 2 - - 3 - 그림 3> 광해에의한하늘밝아짐이천체관측에미치는영향 (Stellarium
작품번호 1507 출품분야학생부출품부문지구과학 2012. 07. 10 구분성명 출품학생 지도교사 윤정관 이경훈 그림 1> 전세계광해분포지도 (Globe at Night 포스터 ) - 1 - 그림 2> 우리나라의광해분포지도 (Cinzano et al., 2001) - 2 - - 3 - 그림 3> 광해에의한하늘밝아짐이천체관측에미치는영향 (Stellarium
09권오설_ok.hwp
 (JBE Vol. 19, No. 5, September 2014) (Regular Paper) 19 5, 2014 9 (JBE Vol. 19, No. 5, September 2014) http://dx.doi.org/10.5909/jbe.2014.19.5.656 ISSN 2287-9137 (Online) ISSN 1226-7953 (Print) a) Reduction
(JBE Vol. 19, No. 5, September 2014) (Regular Paper) 19 5, 2014 9 (JBE Vol. 19, No. 5, September 2014) http://dx.doi.org/10.5909/jbe.2014.19.5.656 ISSN 2287-9137 (Online) ISSN 1226-7953 (Print) a) Reduction
#Ȳ¿ë¼®
 http://www.kbc.go.kr/ A B yk u δ = 2u k 1 = yk u = 0. 659 2nu k = 1 k k 1 n yk k Abstract Web Repertoire and Concentration Rate : Analysing Web Traffic Data Yong - Suk Hwang (Research
http://www.kbc.go.kr/ A B yk u δ = 2u k 1 = yk u = 0. 659 2nu k = 1 k k 1 n yk k Abstract Web Repertoire and Concentration Rate : Analysing Web Traffic Data Yong - Suk Hwang (Research
Microsoft Word - Lab.4
 Lab. 1. I-V Lab. 4. 연산증폭기 Characterist 비 tics of a Dio 비교기 ode 응용 회로 1. 실험목표 연산증폭기를이용한비교기비교기응용회로를이해 응용회로를구성, 측정및평가해서연산증폭기 2. 실험회로 A. 연산증폭기비교기응용회로 (a) 기본비교기 (b) 출력제한 비교기 (c) 슈미트트리거 (d) 포화반파정류회로그림 4.1. 연산증폭기비교기응용회로
Lab. 1. I-V Lab. 4. 연산증폭기 Characterist 비 tics of a Dio 비교기 ode 응용 회로 1. 실험목표 연산증폭기를이용한비교기비교기응용회로를이해 응용회로를구성, 측정및평가해서연산증폭기 2. 실험회로 A. 연산증폭기비교기응용회로 (a) 기본비교기 (b) 출력제한 비교기 (c) 슈미트트리거 (d) 포화반파정류회로그림 4.1. 연산증폭기비교기응용회로
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. vol. 27, no. 8, Aug [3]. ±90,.,,,, 5,,., 0.01, 0.016, 99 %... 선형간섭
![THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. vol. 27, no. 8, Aug [3]. ±90,.,,,, 5,,., 0.01, 0.016, 99 %... 선형간섭](/thumbs/91/107002868.jpg "THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. vol. 27, no. 8, Aug [3]. ±90,.,,,, 5,,., 0.01, 0.016, 99 %... 선형간섭") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2016 Aug.; 27(8), 693700. http://dx.doi.org/10.5515/kjkiees.2016.27.8.693 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Design
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2016 Aug.; 27(8), 693700. http://dx.doi.org/10.5515/kjkiees.2016.27.8.693 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Design
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
<B4EBC7D0BCF6C7D02DBBEFB0A2C7D4BCF62E687770>
 삼각함수. 삼각함수의덧셈정리 삼각함수의덧셈정리 삼각함수 sin (α + β ), cos (α + β ), tan (α + β ) 등을 α 또는 β 의삼각함수로나 타낼수있다. 각 α 와각 β 에대하여 α >0, β >0이고 0 α - β < β 를만족한다고가정하 자. 다른경우에도같은방법으로증명할수있다. 각 α 와각 β 에대하여 θ = α - β 라고놓자. 위의그림에서원점에서거리가
삼각함수. 삼각함수의덧셈정리 삼각함수의덧셈정리 삼각함수 sin (α + β ), cos (α + β ), tan (α + β ) 등을 α 또는 β 의삼각함수로나 타낼수있다. 각 α 와각 β 에대하여 α >0, β >0이고 0 α - β < β 를만족한다고가정하 자. 다른경우에도같은방법으로증명할수있다. 각 α 와각 β 에대하여 θ = α - β 라고놓자. 위의그림에서원점에서거리가
TOFD Time Of Flight Diffraction
 Argus 목 차 1. 머리말 2. 일반초음파탐상검사 3. 자동초음파탐상시스템 (TOFD) 1) 탐상원리 2) 시스템구성 3) 적용코드 4) 적용사례 4. TOFD 의장단점 1. 머리말 각종 PLANT 제품의재료와용접구조물의품질확보를위한수단으로비파괴검사는오래전부터많이적용되어왔다. 일반적으로비파괴검사는제품의내부결함검출 (Volumetric Inspection)
Argus 목 차 1. 머리말 2. 일반초음파탐상검사 3. 자동초음파탐상시스템 (TOFD) 1) 탐상원리 2) 시스템구성 3) 적용코드 4) 적용사례 4. TOFD 의장단점 1. 머리말 각종 PLANT 제품의재료와용접구조물의품질확보를위한수단으로비파괴검사는오래전부터많이적용되어왔다. 일반적으로비파괴검사는제품의내부결함검출 (Volumetric Inspection)
[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (
![[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (](/thumbs/103/157216582.jpg "[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : ~ 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 (") [ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : 2013. 4. 1 ~ 2014. 12. 31 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 ( 울산과학고 ) 권범석 ( 울산과학고 ) 김진영 ( 울산과학고 ) 조희제 ( 울산과학고 ) .
[ 물리 ] 과학고 R&E 결과보고서 유체내에서물체의마찰력에미치는 표면무늬에대한연구 연구기간 : 2013. 4. 1 ~ 2014. 12. 31 연구책임자 : 홍순철 ( 울산대학교 ) 지도교사 : 김영미 ( 울산과학고 ) 참여학생 : 김형규 ( 울산과학고 ) 노준영 ( 울산과학고 ) 권범석 ( 울산과학고 ) 김진영 ( 울산과학고 ) 조희제 ( 울산과학고 ) .
[ReadyToCameral]RUF¹öÆÛ(CSTA02-29).hwp
![[ReadyToCameral]RUF¹öÆÛ(CSTA02-29).hwp](/thumbs/80/82353018.jpg "[ReadyToCameral]RUF¹öÆÛ(CSTA02-29).hwp") RUF * (A Simple and Efficient Antialiasing Method with the RUF buffer) (, Byung-Uck Kim) (Yonsei Univ. Depth of Computer Science) (, Woo-Chan Park) (Yonsei Univ. Depth of Computer Science) (, Sung-Bong
RUF * (A Simple and Efficient Antialiasing Method with the RUF buffer) (, Byung-Uck Kim) (Yonsei Univ. Depth of Computer Science) (, Woo-Chan Park) (Yonsei Univ. Depth of Computer Science) (, Sung-Bong
(001~006)개념RPM3-2(부속)
개념RPM3-2(부속)") www.imth.tv - (~9)개념RPM-(본문).. : PM RPM - 대푯값 페이지 다민 PI LPI 알피엠 대푯값과산포도 유형 ⑴ 대푯값 자료 전체의 중심적인 경향이나 특징을 하나의 수로 나타낸 값 ⑵ 평균 (평균)= Ⅰ 통계 (변량)의 총합 (변량의 개수) 개념플러스 대푯값에는 평균, 중앙값, 최 빈값 등이 있다. ⑶ 중앙값 자료를 작은 값부터 크기순으로
www.imth.tv - (~9)개념RPM-(본문).. : PM RPM - 대푯값 페이지 다민 PI LPI 알피엠 대푯값과산포도 유형 ⑴ 대푯값 자료 전체의 중심적인 경향이나 특징을 하나의 수로 나타낸 값 ⑵ 평균 (평균)= Ⅰ 통계 (변량)의 총합 (변량의 개수) 개념플러스 대푯값에는 평균, 중앙값, 최 빈값 등이 있다. ⑶ 중앙값 자료를 작은 값부터 크기순으로
Gray level 변환 및 Arithmetic 연산을 사용한 영상 개선
 Point Operation Histogram Modification 김성영교수 금오공과대학교 컴퓨터공학과 학습내용 HISTOGRAM HISTOGRAM MODIFICATION DETERMINING THRESHOLD IN THRESHOLDING 2 HISTOGRAM A simple datum that gives the number of pixels that a
Point Operation Histogram Modification 김성영교수 금오공과대학교 컴퓨터공학과 학습내용 HISTOGRAM HISTOGRAM MODIFICATION DETERMINING THRESHOLD IN THRESHOLDING 2 HISTOGRAM A simple datum that gives the number of pixels that a
(b) 연산증폭기슬루율측정회로 (c) 연산증폭기공통모드제거비측정회로 그림 1.1. 연산증폭기성능파라미터측정회로
 연산증폭기슬루율측정회로 (c) 연산증폭기공통모드제거비측정회로 그림 1.1. 연산증폭기성능파라미터측정회로") Lab. 1. I-V Characteristics of a Diode Lab. 1. 연산증폭기특성실험 1. 실험목표 연산증폭기의전압이득 (Gain), 입력저항, 출력저항, 대역폭 (Bandwidth), 오프셋전압 (Offset Voltage), 공통모드제거비 (Common-mode Rejection Ratio; CMRR) 및슬루율 (Slew Rate) 등의기본적인성능파라미터에대해서실험을통해서이해
Lab. 1. I-V Characteristics of a Diode Lab. 1. 연산증폭기특성실험 1. 실험목표 연산증폭기의전압이득 (Gain), 입력저항, 출력저항, 대역폭 (Bandwidth), 오프셋전압 (Offset Voltage), 공통모드제거비 (Common-mode Rejection Ratio; CMRR) 및슬루율 (Slew Rate) 등의기본적인성능파라미터에대해서실험을통해서이해
04 Çмú_±â¼ú±â»ç
 42 s p x f p (x) f (x) VOL. 46 NO. 12 2013. 12 43 p j (x) r j n c f max f min v max, j j c j (x) j f (x) v j (x) f (x) v(x) f d (x) f (x) f (x) v(x) v(x) r f 44 r f X(x) Y (x) (x, y) (x, y) f (x, y) VOL.
42 s p x f p (x) f (x) VOL. 46 NO. 12 2013. 12 43 p j (x) r j n c f max f min v max, j j c j (x) j f (x) v j (x) f (x) v(x) f d (x) f (x) f (x) v(x) v(x) r f 44 r f X(x) Y (x) (x, y) (x, y) f (x, y) VOL.
i
 저작자표시 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 이저작물을영리목적으로이용할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 귀하는, 이저작물의재이용이나배포의경우, 이저작물에적용된이용허락조건을명확하게나타내어야합니다.
저작자표시 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 이저작물을영리목적으로이용할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 귀하는, 이저작물의재이용이나배포의경우, 이저작물에적용된이용허락조건을명확하게나타내어야합니다.
세계 비지니스 정보
 - i - ii - iii - iv - v - vi - vii - viii - ix - 1 - 2 - 3 - - - - - - - - - - 4 - - - - - - 5 - - - - - - - - - - - 6 - - - - - - - - - 7 - - - - 8 - 9 - 10 - - - - - - - - - - - - 11 - - - 12 - 13 -
- i - ii - iii - iv - v - vi - vii - viii - ix - 1 - 2 - 3 - - - - - - - - - - 4 - - - - - - 5 - - - - - - - - - - - 6 - - - - - - - - - 7 - - - - 8 - 9 - 10 - - - - - - - - - - - - 11 - - - 12 - 13 -
À±½Â¿í Ãâ·Â
 Representation, Encoding and Intermediate View Interpolation Methods for Multi-view Video Using Layered Depth Images The multi-view video is a collection of multiple videos, capturing the same scene at
Representation, Encoding and Intermediate View Interpolation Methods for Multi-view Video Using Layered Depth Images The multi-view video is a collection of multiple videos, capturing the same scene at
KAERIAR hwp
 - i - - ii - - iii - - iv - - v - - vi - Photograph of miniature SiC p-n and Schottky diode detector Photograph SiC chip mounted on a standard electrical package Photograph of SiC neutron detector with
- i - - ii - - iii - - iv - - v - - vi - Photograph of miniature SiC p-n and Schottky diode detector Photograph SiC chip mounted on a standard electrical package Photograph of SiC neutron detector with
Vertical Probe Card Technology Pin Technology 1) Probe Pin Testable Pitch:03 (Matrix) Minimum Pin Length:2.67 High Speed Test Application:Test Socket
 Probe Pin Testable Pitch:03 (Matrix) Minimum Pin Length:2.67 High Speed Test Application:Test Socket") Vertical Probe Card for Wafer Test Vertical Probe Card Technology Pin Technology 1) Probe Pin Testable Pitch:03 (Matrix) Minimum Pin Length:2.67 High Speed Test Application:Test Socket Life Time: 500000
Vertical Probe Card for Wafer Test Vertical Probe Card Technology Pin Technology 1) Probe Pin Testable Pitch:03 (Matrix) Minimum Pin Length:2.67 High Speed Test Application:Test Socket Life Time: 500000
PowerPoint Presentation
 5 불대수 IT CookBook, 디지털논리회로 - 2 - 학습목표 기본논리식의표현방법을알아본다. 불대수의법칙을알아본다. 논리회로를논리식으로논리식을논리회로로표현하는방법을알아본다. 곱의합 (SOP) 과합의곱 (POS), 최소항 (minterm) 과최대항 (mxterm) 에대해알아본다. 01. 기본논리식의표현 02. 불대수법칙 03. 논리회로의논리식변환 04.
5 불대수 IT CookBook, 디지털논리회로 - 2 - 학습목표 기본논리식의표현방법을알아본다. 불대수의법칙을알아본다. 논리회로를논리식으로논리식을논리회로로표현하는방법을알아본다. 곱의합 (SOP) 과합의곱 (POS), 최소항 (minterm) 과최대항 (mxterm) 에대해알아본다. 01. 기본논리식의표현 02. 불대수법칙 03. 논리회로의논리식변환 04.
.4 편파 편파 전파방향에수직인평면의주어진점에서시간의함수로 벡터의모양과궤적을나타냄. 편파상태 polriion s 타원편파 llipill polrid: 가장일반적인경우 의궤적은타원 원형편파 irulr polrid 선형편파 linr polrid k k 복소량 편파는 와 의
 lrognis II 전자기학 제 장 : 전자파의전파 Prof. Young Cul L 초고주파시스템집적연구실 Advnd RF Ss Ingrion ARSI Lb p://s.u..kr/iuniv/usr/rfsil/ Advnd RF Ss Ingrion ARSI Lb. Young Cul L .4 편파 편파 전파방향에수직인평면의주어진점에서시간의함수로 벡터의모양과궤적을나타냄.
lrognis II 전자기학 제 장 : 전자파의전파 Prof. Young Cul L 초고주파시스템집적연구실 Advnd RF Ss Ingrion ARSI Lb p://s.u..kr/iuniv/usr/rfsil/ Advnd RF Ss Ingrion ARSI Lb. Young Cul L .4 편파 편파 전파방향에수직인평면의주어진점에서시간의함수로 벡터의모양과궤적을나타냄.
구리 전해도금 후 열처리에 따른 미세구조의 변화와 관련된 Electromigration 신뢰성에 관한 연구
 工學碩士學位論文 Electromigration-resistance related microstructural change with rapid thermal annealing of electroplated copper films 2005 年 2 月 仁荷大學校大學院 金屬工學科 朴賢皒 - 1 - 工學碩士學位論文 Electromigration-resistance related
工學碩士學位論文 Electromigration-resistance related microstructural change with rapid thermal annealing of electroplated copper films 2005 年 2 月 仁荷大學校大學院 金屬工學科 朴賢皒 - 1 - 工學碩士學位論文 Electromigration-resistance related
Łø·ŸÕ=¤ ¬ ÇX±xÒ¸ 06 - Èpº– 1
 그래픽스강의노트 06 - 조명 1 강영민 동명대학교 2015 년 2 학기 강영민 ( 동명대학교 ) 3D 그래픽스프로그래밍 2015 년 2 학기 1 / 25 음영 계산의 필요성 음영(陰影) 계산, 혹은 셰이딩(shading)은 어떤 물체의 표면에서 어두운 부분과 밝은 부분을 서로 다른 밝기로 그려내는 것 모든 면을 동일한 색으로 그리면 입체감이 없다. 2 /
그래픽스강의노트 06 - 조명 1 강영민 동명대학교 2015 년 2 학기 강영민 ( 동명대학교 ) 3D 그래픽스프로그래밍 2015 년 2 학기 1 / 25 음영 계산의 필요성 음영(陰影) 계산, 혹은 셰이딩(shading)은 어떤 물체의 표면에서 어두운 부분과 밝은 부분을 서로 다른 밝기로 그려내는 것 모든 면을 동일한 색으로 그리면 입체감이 없다. 2 /
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
3. 다음은카르노맵의표이다. 논리식을간략화한것은? < 나 > 4. 다음카르노맵을간략화시킨결과는? < >
 . 변수의수 ( 數 ) 가 3 이라면카르노맵에서몇개의칸이요구되는가? 2칸 나 4칸 다 6칸 8칸 < > 2. 다음진리표의카르노맵을작성한것중옳은것은? < 나 > 다 나 입력출력 Y - 2 - 3. 다음은카르노맵의표이다. 논리식을간략화한것은? < 나 > 4. 다음카르노맵을간략화시킨결과는? < > 2 2 2 2 2 2 2-3 - 5. 다음진리표를간략히한결과
. 변수의수 ( 數 ) 가 3 이라면카르노맵에서몇개의칸이요구되는가? 2칸 나 4칸 다 6칸 8칸 < > 2. 다음진리표의카르노맵을작성한것중옳은것은? < 나 > 다 나 입력출력 Y - 2 - 3. 다음은카르노맵의표이다. 논리식을간략화한것은? < 나 > 4. 다음카르노맵을간략화시킨결과는? < > 2 2 2 2 2 2 2-3 - 5. 다음진리표를간략히한결과
- 1 -
 - 1 - - 2 - - 3 - - 4 - - 5 - - 1 - - 2 - - 3 - - 4 - σ σ σ σ σ σ σ - 5 - - 6 - - 7 - - 8 - log - 9 - - 10 - - 11 - - 12 - m ax m ax - 13 - - 14 - - 15 - - 16 - - 17 - tan - 18 - - 19 - tan tan - 20 -
- 1 - - 2 - - 3 - - 4 - - 5 - - 1 - - 2 - - 3 - - 4 - σ σ σ σ σ σ σ - 5 - - 6 - - 7 - - 8 - log - 9 - - 10 - - 11 - - 12 - m ax m ax - 13 - - 14 - - 15 - - 16 - - 17 - tan - 18 - - 19 - tan tan - 20 -
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
12È«±â¼±¿Ü339~370
 http://www.kbc.go.kr/ k Si 2 i= 1 Abstract A Study on Establishment of Fair Trade Order in Terrestrial Broadcasting Ki - Sun Hong (Professor, Dept. of Journalism & Mass Communication,
http://www.kbc.go.kr/ k Si 2 i= 1 Abstract A Study on Establishment of Fair Trade Order in Terrestrial Broadcasting Ki - Sun Hong (Professor, Dept. of Journalism & Mass Communication,
Microsoft PowerPoint 상 교류 회로
 3상교류회로 11.1. 3 상교류의발생 평등자계중에놓인회전자철심에기계적으로 120 씩차이가나게감은코일 aa, bb,cc 를배치하고각속도의속도로회전하면각코일의양단에는다음식으로표현되는기전력이발생하게된다. 11.1. 3 상교류의발생 여기서 e a, e b, e c 는각각코일aa, bb, cc 양단에서얻어지는전압의순시치식이며, 각각을상 (phase) 이라한다. 이와같이전압의크기는같고위상이
3상교류회로 11.1. 3 상교류의발생 평등자계중에놓인회전자철심에기계적으로 120 씩차이가나게감은코일 aa, bb,cc 를배치하고각속도의속도로회전하면각코일의양단에는다음식으로표현되는기전력이발생하게된다. 11.1. 3 상교류의발생 여기서 e a, e b, e c 는각각코일aa, bb, cc 양단에서얻어지는전압의순시치식이며, 각각을상 (phase) 이라한다. 이와같이전압의크기는같고위상이
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. vol. 29, no. 6, Jun Rate). STAP(Space-Time Adaptive Processing)., -
. STAP(Space-Time Adaptive Processing)., -") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2018 Jun.; 29(6), 457463. http://dx.doi.org/10.5515/kjkiees.2018.29.6.457 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Sigma-Delta
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2018 Jun.; 29(6), 457463. http://dx.doi.org/10.5515/kjkiees.2018.29.6.457 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Sigma-Delta
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE Feb.; 30(2),
,") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2019 Feb.; 30(2), 124131. http://dx.doi.org/10.5515/kjkiees.2019.30.2.124 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) MIMO
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2019 Feb.; 30(2), 124131. http://dx.doi.org/10.5515/kjkiees.2019.30.2.124 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) MIMO
지능정보연구제 16 권제 1 호 2010 년 3 월 (pp.71~92),.,.,., Support Vector Machines,,., KOSPI200.,. * 지능정보연구제 16 권제 1 호 2010 년 3 월
,.,.,., Support Vector Machines,,., KOSPI200.,. * 지능정보연구제 16 권제 1 호 2010 년 3 월") 지능정보연구제 16 권제 1 호 2010 년 3 월 (pp.71~92),.,.,., Support Vector Machines,,., 2004 5 2009 12 KOSPI200.,. * 2009. 지능정보연구제 16 권제 1 호 2010 년 3 월 김선웅 안현철 社 1), 28 1, 2009, 4. 1. 지능정보연구제 16 권제 1 호 2010 년 3 월 Support
지능정보연구제 16 권제 1 호 2010 년 3 월 (pp.71~92),.,.,., Support Vector Machines,,., 2004 5 2009 12 KOSPI200.,. * 2009. 지능정보연구제 16 권제 1 호 2010 년 3 월 김선웅 안현철 社 1), 28 1, 2009, 4. 1. 지능정보연구제 16 권제 1 호 2010 년 3 월 Support
PowerPoint 프레젠테이션
 03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE Mar.; 28(3),
,") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2017 Mar.; 28(3), 163 169. http://dx.doi.org/10.5515/kjkiees.2017.28.3.163 ISSN 1226-3133 (Print) ISSN 2288-226X (Online) PCB
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2017 Mar.; 28(3), 163 169. http://dx.doi.org/10.5515/kjkiees.2017.28.3.163 ISSN 1226-3133 (Print) ISSN 2288-226X (Online) PCB
이장에서다룰내용 테두리를제어하는스타일시트 외부여백 (Margin) 과내부여백 (Padding) 관련속성 위치관련속성 2
 과내부여백 (Padding) 관련속성 위치관련속성 2") 03 장. 테두리여백지정하는속성 이번장에서는테이블, 레이어, 폼양식등의더예쁘게꾸미기위해서 CSS 를이용하여 HTML 요소의테두리속성을바꾸어보자. 이장에서다룰내용 1 2 3 테두리를제어하는스타일시트 외부여백 (Margin) 과내부여백 (Padding) 관련속성 위치관련속성 2 01. 테두리를제어하는스타일시트 속성값설명 border-width border-left-width
03 장. 테두리여백지정하는속성 이번장에서는테이블, 레이어, 폼양식등의더예쁘게꾸미기위해서 CSS 를이용하여 HTML 요소의테두리속성을바꾸어보자. 이장에서다룰내용 1 2 3 테두리를제어하는스타일시트 외부여백 (Margin) 과내부여백 (Padding) 관련속성 위치관련속성 2 01. 테두리를제어하는스타일시트 속성값설명 border-width border-left-width
실험 5
 실험. apacitor 및 Inductor 의특성 교류회로 apacitor 의 apacitance 측정 본실험에서는 capacitor를포함하는회로에교류 (A) 전원이연결되어있을때, 정상상태 (steady state) 에서 capacitor의전압과전류의관계를알아본다. apacitance의값이 인 capacitor의전류와전압의관계는다음식과같다. i dv = dt
실험. apacitor 및 Inductor 의특성 교류회로 apacitor 의 apacitance 측정 본실험에서는 capacitor를포함하는회로에교류 (A) 전원이연결되어있을때, 정상상태 (steady state) 에서 capacitor의전압과전류의관계를알아본다. apacitance의값이 인 capacitor의전류와전압의관계는다음식과같다. i dv = dt
45-51 ¹Ú¼ø¸¸
 A Study on the Automation of Classification of Volume Reconstruction for CT Images S.M. Park 1, I.S. Hong 2, D.S. Kim 1, D.Y. Kim 1 1 Dept. of Biomedical Engineering, Yonsei University, 2 Dept. of Radiology,
A Study on the Automation of Classification of Volume Reconstruction for CT Images S.M. Park 1, I.S. Hong 2, D.S. Kim 1, D.Y. Kim 1 1 Dept. of Biomedical Engineering, Yonsei University, 2 Dept. of Radiology,
슬라이드 제목 없음
 계량치 Gage R&R 1 Gage R&R 의변동 반복성 (Equipment Variation) : EV- 계측장비에의한변동 - 동일측정자가동일조건에서반복하여발생된측정값의범위로부터계산되므로 Gage의변동을평가하게됨. 재현성 (Operator / Appraiser Variation) : AV- 평가자에의한변동 - 서로다른측정자가동일조건에서측정한값의차이로부터 계산되므로측정자에의한변동을평가함.
계량치 Gage R&R 1 Gage R&R 의변동 반복성 (Equipment Variation) : EV- 계측장비에의한변동 - 동일측정자가동일조건에서반복하여발생된측정값의범위로부터계산되므로 Gage의변동을평가하게됨. 재현성 (Operator / Appraiser Variation) : AV- 평가자에의한변동 - 서로다른측정자가동일조건에서측정한값의차이로부터 계산되므로측정자에의한변동을평가함.
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
exp
 exp exp exp exp exp exp exp exp exp exp exp log 第 卷 第 號 39 4 2011 4 투영법을 이용한 터빈 블레이드의 크리프 특성 분석 329 성을 평가하였다 이를 위해 결정계수값인 값 을 비교하였으며 크리프 시험 결과를 곡선 접합 한 결과와 비선형 최소자승법으로 예측한 결과 사 이 결정계수간 정도의 오차가 발생하였고
exp exp exp exp exp exp exp exp exp exp exp log 第 卷 第 號 39 4 2011 4 투영법을 이용한 터빈 블레이드의 크리프 특성 분석 329 성을 평가하였다 이를 위해 결정계수값인 값 을 비교하였으며 크리프 시험 결과를 곡선 접합 한 결과와 비선형 최소자승법으로 예측한 결과 사 이 결정계수간 정도의 오차가 발생하였고
STATICS Page: 7-1 Tel: (02) Fax: (02) Instructor: Nam-Hoi, Park Date: / / Ch.7 트러스 (Truss) * 트러스의분류 트러스 ( 차원 ): 1. 평면트러스 (planar tru
 Fax: (02) Instructor: Nam-Hoi, Park Date: / / Ch.7 트러스 (Truss) * 트러스의분류 트러스 ( 차원 ): 1. 평면트러스 (planar tru") STATICS Page: 7-1 Instructor: Nam-Hoi, Park Date: / / Ch.7 트러스 (Truss) * 트러스의분류 트러스 ( 차원 ): 1. 평면트러스 (planar truss) - 2 차원 2. 공간트러스 or 입체트러스 (space truss)-3 차원트러스 ( 형태 ): 1. 단순트러스 (simple truss) 삼각형형태의트러스
STATICS Page: 7-1 Instructor: Nam-Hoi, Park Date: / / Ch.7 트러스 (Truss) * 트러스의분류 트러스 ( 차원 ): 1. 평면트러스 (planar truss) - 2 차원 2. 공간트러스 or 입체트러스 (space truss)-3 차원트러스 ( 형태 ): 1. 단순트러스 (simple truss) 삼각형형태의트러스
<363220C0CCBCF6BFB52DB1A4B0A220C6C4B3EBB6F3B8B620BFB5BBF3C8B9B5E620B9E6B9FD2E687770>
 Journal of the Korea Academia-Industrial cooperation Society Vol. 16, No. 3 pp. 2117-2122, 2015 http://dx.doi.org/10.5762/kais.2015.16.3.2117 ISSN 1975-4701 / eissn 2288-4688 광각파노라마영상획득방법 김순철 1, 이수영 1*
Journal of the Korea Academia-Industrial cooperation Society Vol. 16, No. 3 pp. 2117-2122, 2015 http://dx.doi.org/10.5762/kais.2015.16.3.2117 ISSN 1975-4701 / eissn 2288-4688 광각파노라마영상획득방법 김순철 1, 이수영 1*
Microsoft Word - 06 _ _ ÁֱⳲ
 한국정밀공학회지제 31 권 11 호 pp. 999-6 J. Korean Soc. Precis. Eng., Vol. 31, No. 11, pp. 999-6 ISSN 1225-9071(Print), ISSN 2287-8769(Online) November 2014 / 999 http://dx.doi.org/10.7736/kspe.2014.31.11.999 백색광주사간섭계의측정속도개선을위한서브샘플링기법연구
한국정밀공학회지제 31 권 11 호 pp. 999-6 J. Korean Soc. Precis. Eng., Vol. 31, No. 11, pp. 999-6 ISSN 1225-9071(Print), ISSN 2287-8769(Online) November 2014 / 999 http://dx.doi.org/10.7736/kspe.2014.31.11.999 백색광주사간섭계의측정속도개선을위한서브샘플링기법연구
..액추에이터청정화기기모듈러F압력센서10-M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가스켓 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해
 ..액추에이터청정화기기모듈러F압력센서M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해니켈도금처리 튜브재질 폴리우레탄 사용유체 공기, 물주 ) M의경우 ø.1/ø2, ø/ø 적용 M-R ø.1/ø2
..액추에이터청정화기기모듈러F압력센서M series 미니어처피팅 구조도 바브 튜브삽입이용이한형상또한, 튜브유지가확실 몸체 무전해니켈도금처리 가벼운체결토크확실한 Seal 사양 호스니플 튜브 봉투너트 손체결로튜브유지가확실또한, 느슨하게함으로써튜브이탈이용이무전해니켈도금처리 튜브재질 폴리우레탄 사용유체 공기, 물주 ) M의경우 ø.1/ø2, ø/ø 적용 M-R ø.1/ø2
DBPIA-NURIMEDIA
 무용공연에서 무대 조명의 활용방안 2) Suspention Spot Light 무대 상부에 설치하여 연출되는 연기면의 포인트 에 세부 조명을 투광하기 위한 조명기구로써 부드 러우면서도 밝고 제한된 조명을 이용하기 위하여 프레즈널 렌즈를 사용하며 포커스 조명과 투광각도 의 좌우 조정이 가능하다. 3)Upper Horizont Light 무대 상부의 조물 기구에
무용공연에서 무대 조명의 활용방안 2) Suspention Spot Light 무대 상부에 설치하여 연출되는 연기면의 포인트 에 세부 조명을 투광하기 위한 조명기구로써 부드 러우면서도 밝고 제한된 조명을 이용하기 위하여 프레즈널 렌즈를 사용하며 포커스 조명과 투광각도 의 좌우 조정이 가능하다. 3)Upper Horizont Light 무대 상부의 조물 기구에
비트와바이트 비트와바이트 비트 (Bit) : 2진수값하나 (0 또는 1) 를저장할수있는최소메모리공간 1비트 2비트 3비트... n비트 2^1 = 2개 2^2 = 4개 2^3 = 8개... 2^n 개 1 바이트는 8 비트 2 2
 : 2진수값하나 (0 또는 1) 를저장할수있는최소메모리공간 1비트 2비트 3비트... n비트 2^1 = 2개 2^2 = 4개 2^3 = 8개... 2^n 개 1 바이트는 8 비트 2 2") 비트연산자 1 1 비트와바이트 비트와바이트 비트 (Bit) : 2진수값하나 (0 또는 1) 를저장할수있는최소메모리공간 1비트 2비트 3비트... n비트 2^1 = 2개 2^2 = 4개 2^3 = 8개... 2^n 개 1 바이트는 8 비트 2 2 진수법! 2, 10, 16, 8! 2 : 0~1 ( )! 10 : 0~9 ( )! 16 : 0~9, 9 a, b,
비트연산자 1 1 비트와바이트 비트와바이트 비트 (Bit) : 2진수값하나 (0 또는 1) 를저장할수있는최소메모리공간 1비트 2비트 3비트... n비트 2^1 = 2개 2^2 = 4개 2^3 = 8개... 2^n 개 1 바이트는 8 비트 2 2 진수법! 2, 10, 16, 8! 2 : 0~1 ( )! 10 : 0~9 ( )! 16 : 0~9, 9 a, b,
차 례 4
 제 50 회전국과학전람회 2004. 07. 20 차 례 4 - 1 - 표 2. 천체의화각 표 1. 초점거리와화각 - 2 - 그림 1. 목성의표면구조 - 3 - 그림 2. 목성위성의상호현상 - 4 - π 공전속도 원궤도의반지름 π 그림 3. 케플러회전 - 5 - 표 3. 목성의궤도자료 표 4. 목성의물리자료 표 5. 4 대위성의궤도자료및물리자료 - 6 - 그림
제 50 회전국과학전람회 2004. 07. 20 차 례 4 - 1 - 표 2. 천체의화각 표 1. 초점거리와화각 - 2 - 그림 1. 목성의표면구조 - 3 - 그림 2. 목성위성의상호현상 - 4 - π 공전속도 원궤도의반지름 π 그림 3. 케플러회전 - 5 - 표 3. 목성의궤도자료 표 4. 목성의물리자료 표 5. 4 대위성의궤도자료및물리자료 - 6 - 그림
untitled
 Huvitz Digital Microscope HDS-5800 Dimensions unit : mm Huvitz Digital Microscope HDS-5800 HDS-MC HDS-SS50 HDS-TS50 SUPERIORITY Smart Optical Solutions for You! Huvitz Digital Microscope HDS-5800 Contents
Huvitz Digital Microscope HDS-5800 Dimensions unit : mm Huvitz Digital Microscope HDS-5800 HDS-MC HDS-SS50 HDS-TS50 SUPERIORITY Smart Optical Solutions for You! Huvitz Digital Microscope HDS-5800 Contents
BY-FDP-4-70.hwp
 RS-232, RS485 FND Display Module BY-FDP-4-70-XX (Rev 1.0) - 1 - 1. 개요. 본 Display Module은 RS-232, RS-485 겸용입니다. Power : DC24V, DC12V( 주문사양). Max Current : 0.6A 숫자크기 : 58mm(FND Size : 70x47mm 4 개) RS-232,
RS-232, RS485 FND Display Module BY-FDP-4-70-XX (Rev 1.0) - 1 - 1. 개요. 본 Display Module은 RS-232, RS-485 겸용입니다. Power : DC24V, DC12V( 주문사양). Max Current : 0.6A 숫자크기 : 58mm(FND Size : 70x47mm 4 개) RS-232,
 - i - - ii - - i - - ii - - i - - ii - - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 -
- i - - ii - - i - - ii - - i - - ii - - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 -
CONTENTS.HWP
 i ii iii iv v vi vii viii ix x xi - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - - 18 - - 19 - - 20 - - 21 - - 22 - - 23 - - 24 - - 25 -
i ii iii iv v vi vii viii ix x xi - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - - 14 - - 15 - - 16 - - 17 - - 18 - - 19 - - 20 - - 21 - - 22 - - 23 - - 24 - - 25 -
INDUS-8.HWP
 i iii iv v vi vii viii ix x xi 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64
i iii iv v vi vii viii ix x xi 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64
05 목차(페이지 1,2).hwp
.hwp") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2014 Oct.; 25(10), 10771086. http://dx.doi.org/10.5515/kjkiees.2014.25.10.1077 ISSN 1226-3133 (Print)ISSN 2288-226X (Online)
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2014 Oct.; 25(10), 10771086. http://dx.doi.org/10.5515/kjkiees.2014.25.10.1077 ISSN 1226-3133 (Print)ISSN 2288-226X (Online)
기관별 공동 Template
 VR/AR/ 홀로그램과의융복합 그리고산업에서의응용 2017.11.09. 전자부품연구원강훈종 (hoonjongkang@keti.re.kr) Hologram?? Star Wars - 2 - Hologram?? Manchester and London Luton airports Hologram Hatsune Miku concert CNN's human 'hologram'
VR/AR/ 홀로그램과의융복합 그리고산업에서의응용 2017.11.09. 전자부품연구원강훈종 (hoonjongkang@keti.re.kr) Hologram?? Star Wars - 2 - Hologram?? Manchester and London Luton airports Hologram Hatsune Miku concert CNN's human 'hologram'
이 장에서 사용되는 MATLAB 명령어들은 비교적 복잡하므로 MATLAB 창에서 명령어를 직접 입력하지 않고 확장자가 m 인 text 파일을 작성하여 실행을 한다
 이장에서사용되는 MATLAB 명령어들은비교적복잡하므로 MATLAB 창에서명령어를직접입력하지않고확장자가 m 인 text 파일을작성하여실행을한다. 즉, test.m 과같은 text 파일을만들어서 MATLAB 프로그램을작성한후실행을한다. 이와같이하면길고복잡한 MATLAB 프로그램을작성하여실행할수있고, 오류가발생하거나수정이필요한경우손쉽게수정하여실행할수있는장점이있으며,
이장에서사용되는 MATLAB 명령어들은비교적복잡하므로 MATLAB 창에서명령어를직접입력하지않고확장자가 m 인 text 파일을작성하여실행을한다. 즉, test.m 과같은 text 파일을만들어서 MATLAB 프로그램을작성한후실행을한다. 이와같이하면길고복잡한 MATLAB 프로그램을작성하여실행할수있고, 오류가발생하거나수정이필요한경우손쉽게수정하여실행할수있는장점이있으며,
실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터
 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터") 실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터의전면패널에꼽는다. 통상적으로검은색프로브는전면패널의검은단자 (COM) 에꼽으며, 빨간색프로브는빨간색단자에꼽는다.
실험. Multimeter 의사용법및기초회로이론 Multimeter 의사용법 멀티미터 (Multimeter) 는저항, 전압, 전류등을측정할수있는계측기로서전면은다음그림과같다. 멀티미터를이용해서저항, 전압, 전류등을측정하기위해서는다음그림과같은프로브 (probe) 를멀티미터의전면패널에꼽는다. 통상적으로검은색프로브는전면패널의검은단자 (COM) 에꼽으며, 빨간색프로브는빨간색단자에꼽는다.
_김학용.fm
 한국정밀공학회지제 35 권제 1 호 pp. 71-77 January 2018 / 71 J. Korean Soc. Precis. Eng., Vol. 35, No. 1, pp. 71-77 https://doi.org/10.7736/kspe.2018.35.1.71 ISSN 1225-9071 (Print) / 2287-8769 (Online) 공초점변위센서를이용한폰카메라렌즈의자동초점구동측정
한국정밀공학회지제 35 권제 1 호 pp. 71-77 January 2018 / 71 J. Korean Soc. Precis. Eng., Vol. 35, No. 1, pp. 71-77 https://doi.org/10.7736/kspe.2018.35.1.71 ISSN 1225-9071 (Print) / 2287-8769 (Online) 공초점변위센서를이용한폰카메라렌즈의자동초점구동측정
(72) 발명자 이대훈 경기도 성남시 분당구 정자동 파크뷰 611동 901호 박준호 경기도 안산시 상록구 사1동 1323-14 - 2 -
 발명자 이대훈 경기도 성남시 분당구 정자동 파크뷰 611동 901호 박준호 경기도 안산시 상록구 사1동 1323-14 - 2 -") (51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G01N 3/30 (2006.01) (21) 출원번호 10-2008-0090352 (22) 출원일자 2008년09월12일 심사청구일자 2008년09월12일 (65) 공개번호 10-2010-0031318 (43) 공개일자 2010년03월22일 (56) 선행기술조사문헌 KR200430499
(51) Int. Cl. (19) 대한민국특허청(KR) (12) 등록특허공보(B1) G01N 3/30 (2006.01) (21) 출원번호 10-2008-0090352 (22) 출원일자 2008년09월12일 심사청구일자 2008년09월12일 (65) 공개번호 10-2010-0031318 (43) 공개일자 2010년03월22일 (56) 선행기술조사문헌 KR200430499
문제지 제시문 2 보이지 않는 영역에 대한 정보를 얻기 위하여 관측된 다른 정보를 분석하여 역으로 미 관측 영역 에 대한 정보를 얻을 수 있다. 가령 주어진 영역에 장애물이 있는 경우 한 끝 점에서 출발하여 다른 끝 점에 도달하는 최단 경로의 개수를 분석하여 장애물의
 제시문 문제지 2015학년도 대학 신입학생 수시모집 일반전형 면접 및 구술고사 수학 제시문 1 하나의 동전을 던질 때, 앞면이나 뒷면이 나온다. 번째 던지기 전까지 뒷면이 나온 횟수를 라 하자( ). 처음 던지기 전 가진 점수를 점이라 하고, 번째 던졌을 때, 동전의 뒷면이 나오면 가지고 있던 점수를 그대로 두고, 동전의 앞면이 나오면 가지고 있던 점수를 배
제시문 문제지 2015학년도 대학 신입학생 수시모집 일반전형 면접 및 구술고사 수학 제시문 1 하나의 동전을 던질 때, 앞면이나 뒷면이 나온다. 번째 던지기 전까지 뒷면이 나온 횟수를 라 하자( ). 처음 던지기 전 가진 점수를 점이라 하고, 번째 던졌을 때, 동전의 뒷면이 나오면 가지고 있던 점수를 그대로 두고, 동전의 앞면이 나오면 가지고 있던 점수를 배
공기중에서 낙하하는 물체의 운동 이론(교사용)
") 공기중에서낙하하는물체의운동 ( 교사지도자료 ) ( 사이언스큐브웹사이트 : www.sciencecube.com) 실험은지도교사의지도아래실시하고실험안전주의사항을반드시숙지하고지켜주세요. www.sciencecube.com 1 1. 활동안내도움말 (Teacher Information) 공기중에서낙하하는물체는중력과공기저항에의한힘을받아서운동을하게된다. 이때물체에작용하는중력
공기중에서낙하하는물체의운동 ( 교사지도자료 ) ( 사이언스큐브웹사이트 : www.sciencecube.com) 실험은지도교사의지도아래실시하고실험안전주의사항을반드시숙지하고지켜주세요. www.sciencecube.com 1 1. 활동안내도움말 (Teacher Information) 공기중에서낙하하는물체는중력과공기저항에의한힘을받아서운동을하게된다. 이때물체에작용하는중력
09이훈열ok(163-
 Korean Journal of Remote Sensing, Vol.27, No.2, 2011, pp.163~170 Change of Refractive Index of Air in X-band due to Atmospheric Humidity, Temperature and Pressure measured by GB-SAR Interferometry Jae-Hee
Korean Journal of Remote Sensing, Vol.27, No.2, 2011, pp.163~170 Change of Refractive Index of Air in X-band due to Atmospheric Humidity, Temperature and Pressure measured by GB-SAR Interferometry Jae-Hee
제 12강 함수수열의 평등수렴
 제 강함수수열의평등수렴 함수의수열과극한 정의 ( 점별수렴 ): 주어진집합 과각각의자연수 에대하여함수 f : 이있다고가정하자. 이때 을집합 에서로가는함수의수열이라고한다. 모든 x 에대하여 f 수열 f ( x) lim f ( x) 가성립할때함수수열 { f } 이집합 에서함수 f 로수렴한다고한다. 또 함수 f 을집합 에서의함수수열 { f } 의극한 ( 함수 ) 이라고한다.
제 강함수수열의평등수렴 함수의수열과극한 정의 ( 점별수렴 ): 주어진집합 과각각의자연수 에대하여함수 f : 이있다고가정하자. 이때 을집합 에서로가는함수의수열이라고한다. 모든 x 에대하여 f 수열 f ( x) lim f ( x) 가성립할때함수수열 { f } 이집합 에서함수 f 로수렴한다고한다. 또 함수 f 을집합 에서의함수수열 { f } 의극한 ( 함수 ) 이라고한다.
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
Microsoft Word MetOne237Bmanual
 Air Particle Counter 의사용법 Met One 237 Air Particle Counter 조선계측기교역 Tel : 02-2268-4344 Fax : 02-2275-5348 htt//:www.chosun21.co.kr 1. 장비구성 : A. Particle Counter : 본장비는 0.3um 부터측정이가능한 Met One 237B와 0.5 um부터가능한
Air Particle Counter 의사용법 Met One 237 Air Particle Counter 조선계측기교역 Tel : 02-2268-4344 Fax : 02-2275-5348 htt//:www.chosun21.co.kr 1. 장비구성 : A. Particle Counter : 본장비는 0.3um 부터측정이가능한 Met One 237B와 0.5 um부터가능한
<5B313132385D32303039B3E220C1A634B1C720C1A632C8A320B3EDB9AEC1F628C3D6C1BE292E687770>
 디지털 영상에서의 자막추출을 이용한 자막 특성 분석에 관한 연구 이세열 * 요약 본 연구는 방송 프로그램 제작에 있어서 중요한 역할을 담당하고 있는 영상 자막의 특성과 영상 커 뮤니케이션 기능적인 관점에서 나타나고 있는 현상을 살펴본다. 다양한 방송 프로그램에서 활용되고 있는 디지털 영상 자막의 기능은 단순하게 간략한 정보를 전달하는 기능적인 역할을 수행하였다.
디지털 영상에서의 자막추출을 이용한 자막 특성 분석에 관한 연구 이세열 * 요약 본 연구는 방송 프로그램 제작에 있어서 중요한 역할을 담당하고 있는 영상 자막의 특성과 영상 커 뮤니케이션 기능적인 관점에서 나타나고 있는 현상을 살펴본다. 다양한 방송 프로그램에서 활용되고 있는 디지털 영상 자막의 기능은 단순하게 간략한 정보를 전달하는 기능적인 역할을 수행하였다.
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
 Ⅰ. 석면 1 1) American Geological Institute, Glossary of geology, 2008, http://glossary.agiweb.org 2) US OSHA standard 29CFR1910.1001(b) 2 석면분석전문가양성교육교재 : 편광현미경을이용한고형시료중석면분석 1) Cornelis Klein, The Manual
Ⅰ. 석면 1 1) American Geological Institute, Glossary of geology, 2008, http://glossary.agiweb.org 2) US OSHA standard 29CFR1910.1001(b) 2 석면분석전문가양성교육교재 : 편광현미경을이용한고형시료중석면분석 1) Cornelis Klein, The Manual
ez-shv manual
 ez-shv+ SDI to HDMI Converter with Display and Scaler Operation manual REVISION NUMBER: 1.0.0 DISTRIBUTION DATE: NOVEMBER. 2018 저작권 알림 Copyright 2006~2018 LUMANTEK Co., Ltd. All Rights Reserved 루먼텍 사에서
ez-shv+ SDI to HDMI Converter with Display and Scaler Operation manual REVISION NUMBER: 1.0.0 DISTRIBUTION DATE: NOVEMBER. 2018 저작권 알림 Copyright 2006~2018 LUMANTEK Co., Ltd. All Rights Reserved 루먼텍 사에서
 22-12324-4TEL:3668-3114 FAX:742-3387 TEL:3668-3120 FAX:745-9476 TEL:3668-3109, 2279-0867~8 TEL:3668-3127 TEL:3668-3123, 3128, 3162 www.saeki.co.kr, www.pentaximaging.co.kr Small 의 큰 스타일을 경험하다 당신의 카메라만으로도,
22-12324-4TEL:3668-3114 FAX:742-3387 TEL:3668-3120 FAX:745-9476 TEL:3668-3109, 2279-0867~8 TEL:3668-3127 TEL:3668-3123, 3128, 3162 www.saeki.co.kr, www.pentaximaging.co.kr Small 의 큰 스타일을 경험하다 당신의 카메라만으로도,
Microsoft PowerPoint - 30.ppt [호환 모드]
![Microsoft PowerPoint - 30.ppt [호환 모드]](/thumbs/97/130824528.jpg "Microsoft PowerPoint - 30.ppt [호환 모드]") 이중포트메모리의실제적인고장을고려한 Programmable Memory BIST 2010. 06. 29. 연세대학교전기전자공학과박영규, 박재석, 한태우, 강성호 hipyk@soc.yonsei.ac.kr Contents Introduction Proposed Programmable Memory BIST(PMBIST) Algorithm Instruction PMBIST
이중포트메모리의실제적인고장을고려한 Programmable Memory BIST 2010. 06. 29. 연세대학교전기전자공학과박영규, 박재석, 한태우, 강성호 hipyk@soc.yonsei.ac.kr Contents Introduction Proposed Programmable Memory BIST(PMBIST) Algorithm Instruction PMBIST
법학박사학위논문 실손의료보험연구 2018 년 8 월 서울대학교대학원 법과대학보험법전공 박성민
 저작자표시 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 이저작물을영리목적으로이용할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 귀하는, 이저작물의재이용이나배포의경우, 이저작물에적용된이용허락조건을명확하게나타내어야합니다.
저작자표시 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 이차적저작물을작성할수있습니다. 이저작물을영리목적으로이용할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 귀하는, 이저작물의재이용이나배포의경우, 이저작물에적용된이용허락조건을명확하게나타내어야합니다.
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE Jul.; 27(7),
,") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2016 Jul.; 27(7), 625634. http://dx.doi.org/10.5515/kjkiees.2016.27.7.625 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Near-Field
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2016 Jul.; 27(7), 625634. http://dx.doi.org/10.5515/kjkiees.2016.27.7.625 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) Near-Field
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE May; 26(5),
,") THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2015 May; 26(5), 435444. http://dx.doi.org/10.5515/kjkiees.2015.26.5.435 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) 77 GHz
THE JOURNAL OF KOREAN INSTITUTE OF ELECTROMAGNETIC ENGINEERING AND SCIENCE. 2015 May; 26(5), 435444. http://dx.doi.org/10.5515/kjkiees.2015.26.5.435 ISSN 1226-3133 (Print)ISSN 2288-226X (Online) 77 GHz
 - 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
- 1 - - 2 - - 3 - - 4 - - 5 - - 6 - 주행방향 900 Φ100 재귀반사체 지주 주행방향 1100 120 40 200 740 900 120 45 원형재귀반사체 Φ100 검정색바탕도색 흰색합성수지지주 - 7 - 옹벽 900mm 900mm 노면 옹벽 900mm 900mm 노면 - 8 - - 9 - - 10 - - 11 - - 12 - 0.9
Microsoft PowerPoint - ch02-1.ppt
 2. Coodinte Sstems nd Tnsfomtion 20 20 2.2 Ctesin Coodintes (,, ) () (b) Figue 1.1 () Unit vectos,, nd, (b) components of long,, nd. 직각좌표계에서각변수 (,, ) 들의범위 < < < < < < (2.1) 직각좌표계에서임의의벡터 는,, 가그림 1.1 에서와같이,,
2. Coodinte Sstems nd Tnsfomtion 20 20 2.2 Ctesin Coodintes (,, ) () (b) Figue 1.1 () Unit vectos,, nd, (b) components of long,, nd. 직각좌표계에서각변수 (,, ) 들의범위 < < < < < < (2.1) 직각좌표계에서임의의벡터 는,, 가그림 1.1 에서와같이,,
Backlight Unit의 광학적 특성 해석 및 Prism Sheet의 최적화 설계
 α CRT(Cathod Ray Tube) 능동 PDP(Plasma Display) ELD(electroluminescent Display) 수동 LCD LED(Light Emitting Diode) LCD Backlight unit 반사판 Diffuser sheet Reflection sheet Lamp Prism sheet Diffuser sheet
α CRT(Cathod Ray Tube) 능동 PDP(Plasma Display) ELD(electroluminescent Display) 수동 LCD LED(Light Emitting Diode) LCD Backlight unit 반사판 Diffuser sheet Reflection sheet Lamp Prism sheet Diffuser sheet
< FC3B5B9AEC7D0BBE7C0FC5F D F74B0A3BCB7B0E85F50616B5F76312E687770>
 Fabry-Perot 간섭계 (Fabry-Perot Interferometer) 해설자 : 박수종 ( 경희대학교우주과학과, 2007.06.11) 분광학은양자화된원자또는분자의에너지차이만큼흡수되거나방출되는복사에너지를관측하여, 그런현상이나타나는이유를분석하는학문이다. 천문학에서분광관측을하여직접적으로얻으려는정보는 (1) 방출또는흡수선의총복사에너지와 (2) 선의모양에서구한운동학적성분이다.
Fabry-Perot 간섭계 (Fabry-Perot Interferometer) 해설자 : 박수종 ( 경희대학교우주과학과, 2007.06.11) 분광학은양자화된원자또는분자의에너지차이만큼흡수되거나방출되는복사에너지를관측하여, 그런현상이나타나는이유를분석하는학문이다. 천문학에서분광관측을하여직접적으로얻으려는정보는 (1) 방출또는흡수선의총복사에너지와 (2) 선의모양에서구한운동학적성분이다.
 CONTENTS C U B A I C U B A 8 Part I Part II Part III Part IV Part V Part VI Part VII Part VIII Part IX 9 C U B A 10 Part I Part II Part III Part IV Part V Part VI Part VII Part VIII Part IX 11 C U B
CONTENTS C U B A I C U B A 8 Part I Part II Part III Part IV Part V Part VI Part VII Part VIII Part IX 9 C U B A 10 Part I Part II Part III Part IV Part V Part VI Part VII Part VIII Part IX 11 C U B
Microsoft PowerPoint - lecture16-ch6
 Lighting OpenGL Lighting OpenGL의조명에는 3가지요소가필요 광원 (Lights) 재질 (Materials) 면의법선벡터 (Normals) 321190 2007년봄학기 5/15/2007 박경신 OpenGL Lighting OpenGL Lighting OpenGL에서제공하는조명모델 환경광 / 주변광 (ambient lights) 점광원 (point
Lighting OpenGL Lighting OpenGL의조명에는 3가지요소가필요 광원 (Lights) 재질 (Materials) 면의법선벡터 (Normals) 321190 2007년봄학기 5/15/2007 박경신 OpenGL Lighting OpenGL Lighting OpenGL에서제공하는조명모델 환경광 / 주변광 (ambient lights) 점광원 (point
슬라이드 1
 16 장 Fourier 해석 16.1 사인함수를이용한곡선접합 16.2 연속 Fourier 급수 16.3 주파수영역과시간영역 16.4 Fourier 적분과변환 16.5 이산 Fourier 변환 (DFT) 16.6 파워스펙트럼 16.1 사인함수를이용한곡선접합 (1/5) 주기가 T 인주기함수 f() t = f( t+ T) 주기운동의가장기본 : 원운동 ( 코사인,
16 장 Fourier 해석 16.1 사인함수를이용한곡선접합 16.2 연속 Fourier 급수 16.3 주파수영역과시간영역 16.4 Fourier 적분과변환 16.5 이산 Fourier 변환 (DFT) 16.6 파워스펙트럼 16.1 사인함수를이용한곡선접합 (1/5) 주기가 T 인주기함수 f() t = f( t+ T) 주기운동의가장기본 : 원운동 ( 코사인,
Precision Measuring
 Precision Measurement Chapter 4 각도측정 4.1 각도의기준 R=1 라디안을쓰는이유 4.2 각도의단위 1 도 (, degree) : 1 = 60 = 3600 = π/180 rad 1 분 (, arcminute) : 1 = 60 = 1/60 1 초 (, arcsecond) : 1 = 1/60 = 1/3600 1 라디안 (rad, radian)
Precision Measurement Chapter 4 각도측정 4.1 각도의기준 R=1 라디안을쓰는이유 4.2 각도의단위 1 도 (, degree) : 1 = 60 = 3600 = π/180 rad 1 분 (, arcminute) : 1 = 60 = 1/60 1 초 (, arcsecond) : 1 = 1/60 = 1/3600 1 라디안 (rad, radian)
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,