<B1E2BABB2D52522D31362D31352E20C0DAC0B2C1D6C7E0C0DAB5BFC2F720C0B1B8AE20B9D720BFEEC0FC2E687770>
|
|
|
- 정민 이
- 6 years ago
- Views:
Transcription
")
1 기본 -RR 자율주행자동차윤리및운전자수용성기초연구 A Fundamental Research on Public Perceptions on Ethics, Legal, and Social Acceptance of Autonomous Vehicles (AV) 김규옥ㆍ문영준ㆍ조선아ㆍ이종덕
2
3 서문 최근우리정부는미래성장동력의하나로자율주행자동차를선정하였습니다. 자율주행자동차의기술은인적요인으로발생할수있는교통사고를크게감소시킬수있는기술이며, 정체된자동차관련산업을활성활시킬수있는기술이기때문입니다. 자율주행기술은단순히운전자의운행을지원해주는기술에서부터운전석과조향장치가전혀필요없는완전자율주행자동차까지다양합니다. 초기단계의자율주행기술은현재새롭게출시되는자동차에이미적용되기시작하였고, 고도의자율주행기술을체용한자동차를개발하기위하여각국정부는다양한지원을아끼지않고있습니다. 우리정부도 2020년부분자율주행자동차를상용화하는것을목표로다양한연구개발을지원하고있습니다. 이를통해우리의자동차기술이미래자동차산업을선도할수있는도약의계기로삼고자하고있습니다. 그러나자율주행자동차의도입은기존교통체계와자동차산업생태계를크게변화시킬수있습니다. 자율주행자동차의원활한운행을지원하고, 기술의효과를극대화하기위해서는도로인프라의변화뿐만이아니라자율주행기술을이용하게될일반이용자와자동차운수사업종사자들의수용성을확보할필요가있습니다. 특히자율주행자동차는기존의자동차와는형태와기능은물론운전자역할의변화를요구하고있으나, 현행법체계와보험제도는시스템이아닌사람이운전하는것을기본전제로하고있기때문에법제도의개선이필요합니다. 또한자율주행자동차의시스템알고리즘을개발함에
4 있어불가피한상황에서의경미한교통법규위반과극단적교통사고딜레마상황에서의윤리적선택을위한원칙과가이드라인또한필요합니다. 이에따라본연구에서는자유주행자동차기술과윤리및수용성에관하여고찰하고, 자율주행자동차와관계된윤리, 법적책임과보험제도등의제도개선이필요한구체적인분야를검토하며, 도로운행에있어발생할수있는운전자의윤리적선택을철학실험의방법을적용한고찰과일반인, 운수산업종사자및전문가의수용성과인식을조사하였고대응방향을제시하였습니다. 아무쪼록본연구의결과가향후자율주행자동차의법제도, 보험제도등다양한정책과자율주행자동차윤리알고리즘가이드설정에활용될수있는기초자료가되기를기대해봅니다. 아울러본연구를수행하는과정에서많은도움을주신국토교통부의자율주행자동차융 복합미래포럼관계자, 자동차 교통 심리학 철학등다양한분야의학계및보험업계의여러전문가분들에게연구진을대신하여감사드립니다. 2016년 11월한국교통연구원 원장이창운
5 차례 요 약 xiii 제1장서론 1 제1 절연구의배경과목적 1 제2 절연구의범위및방법 4 제3절선행연구고찰및본연구의차별성 6 제2장자율주행자동차기술개발및현황분석 11 제1 절자율주행자동차정의 11 제2 절자율주행자동차기술개발분석 25 제3 절자율주행자동차기술과윤리 54 제3장자율주행자동차윤리와책임문제 65 제1 절자율주행자동차의윤리개념 65 제2 절자율주행자동차법적책임과보험 81 제3절판단기준과법적책임기준의시사점 86 제4장자율주행자동차윤리및운전자수용성조사 87 제1 절자율주행자동차윤리개념과인식분석 87 제2 절자율주행자동차윤리인식조사 95 제3 절자율주행자동차의운전자수용성 122
6 제4절자율주행자동차이용모형개발 170 제5 절윤리실험및수용성조사의시사점 175 제5장자율주행자동차윤리및수용성쟁점과대응방향 178 제1절자율주행자동차윤리와수용성쟁점과대응방향 178 제2 절자율주행자동차의법적책임쟁점과대응방향 192 제3절자율주행자동차보험관련쟁점과대응방향 201 제 6 장결론및정책건의 218 제1 절결론 218 제2 절정책건의 220 참고문헌 223 부록 229 Abstract 249
7 표차례 < 표 1-1> 본연구와선행연구와의차별성 8 < 표 2-1> 각센서별기술활용비교 14 < 표 2-2> 각센서별기능 16 < 표 2-3> 자율주행주요서비스 20 < 표 2-4> SAE 와 NHTSA 의자율주행기술단계정의 23 < 표 2-5> 자율주행기술수준에따른운전자역할 25 < 표 2-6> 주요완성차업체사례 29 < 표 2-7> 완성차업체의카셰어링사례 30 < 표 2-8> 완성차업체의인포테인먼트시스템개발사례 31 < 표 2-9> IT 업체의자율주행자동차개발관점 32 < 표 2-10> 자율주행차를바라보는 IT 업계와완성차업계의관점 39 < 표 2-11> 캘리포니아주의자율주행자동차및운전자등록 41 < 표 2-12> 원인별운전자전환횟수 43 < 표 2-13> 완성차업체 ( 부품업체 ) 와 IT 업체간연합사례 47 < 표 2-14> 자율주행자동차의효과 52 < 표 2-15> 케어프리 (Care-Free) 한차량 ( 자율주행자동차및차량공유 ) 의장단점 52 < 표 2-16> 자율주행의단계별제어및운영범위비교 57 < 표 2-17> 자율주행의단계와윤리 59 < 표 2-18> 자율주행자동차운행에필요한도로인프라정보와차량정보 61 < 표 3-1> 자율주행과연관된기존법제도현황 81 < 표 4-1> 윤리실험표본수 105 < 표 4-2> 그룹 1의응답특성 106 < 표 4-3> 피해의정도제시방법에따른참가자의견변화 109 < 표 4-4> 실험그룹 1의선택에대한실험그룹 2의평가 ( 확률제시 ) 112
8 < 표 4-5> 실험그룹 1의선택에대한실험그룹 2의평가 ( 피해정도제시 ) 113 < 표 4-6> 확률제시시나리오 2차실험결과 114 < 표 4-7> 피해정도시나리오 2차실험결과 114 < 표 4-8> 응답자특성 ( 일반인 / 전문가 ) 129 < 표 4-9> 응답자특성 ( 직업운전자 ) 130 < 표 4-10> 전문가의주요이동수단 133 < 표 4-11> 전문가자동차보유대수 133 < 표 4-12> 교통사고경험 ( 전문가 ) 135 < 표 4-13> 자율주행기능별장착의사가격 ( 전문가 ) 147 < 표 4-14> 변수설정 ( 일반인대상 ) 170 < 표 4-15> 완전자율주행자동차이용의향에대한모형적합도 171 < 표 4-16> 완전자율주행자동차이용의향모형 171 < 표 4-17> 3단계자율주행자동차이용의양모형적합도 172 < 표 4-18> 3단계자율주행자동차이용의향모형 172 < 표 4-19> 자율주행택시이용의향모형 172 < 표 4-20> 완전자율주행택시이용의향모형 173 < 표 4-21> 자율버스이용의향모형적합도 173 < 표 4-22> 자율주행버스이용의향모형 173 < 표 4-23> 자율주행자동차공유이용의향모형적합도 174 < 표 4-24> 자율주행자동차공유이용모형 174 < 표 5-1> 자율주행자동차에대한인식비교 182 < 표 5-2> 자율주행기능장착의향및지불의사가격 186
9 그림차례 < 그림 1-1> 연구추진체계 5 < 그림 2-1> 자율주행차의정의 11 < 그림 2-2> 자율주행을위한기술개념 12 < 그림 2-3> 자율주행프로세스 12 < 그림 2-4> 각센서별기술활용 15 < 그림 2-5> SAE 와 NHTSA 에서의자동운전레벨정의 23 < 그림 2-6> 자율주행컨셉트카 26 < 그림 2-7> 주요 IT 업체의자율주행시험차량 33 < 그림 2-8> 스마트모빌리티 34 < 그림 2-9> 구글의자율주행프로토타입차량 35 < 그림 2-10> 자율주행자동차시험주행거리비교 ( 캘리포니아주일반도로 ) 41 < 그림 2-11> 운전자전환횟수 ( 좌 ) 운행마일당운전자전환횟수 ( 우 ) 42 < 그림 2-12> 닛산 (Nissan) 자율주행자동차의트렁크내부 45 < 그림 2-13> 자동차산업의미래방향 50 < 그림 2-14> 자율주행자동차공유효과 51 < 그림 2-15> 운전자의운전프로세스 54 < 그림 2-16> 자율주행시스템의운전프로세스 56 < 그림 4-1> 인명피해정도에따른시나리오 91 < 그림 4-2> 역선택 (Adverse Selection) 문제발생시나리오 92 < 그림 4-3> 충돌시결과가불확실한상황시나리오 94 < 그림 4-4> 윤리딜레마상황예시 96 < 그림 4-5> 윤리실험 1의절차 103 < 그림 4-6> 윤리실험 2의수행절차 105 < 그림 4-7> 피해확률제시에따른선택 107
10 < 그림 4-8> 피해정도에따른참가자의선택 108 < 그림 4-9> 확률제시시나리오와피해정도제시시나리오에따른의사변경비율 110 < 그림 4-10> 이륜자동차충돌시나리오에대한선택비교 115 < 그림 4-11> 대형차와경차충돌시나리오에대한선택비교 116 < 그림 4-12> 딜레마시최우선고려사항비교 117 < 그림 4-13> 딜레마직면시상황결정권자 118 < 그림 4-14> 교통법규준수정도 119 < 그림 4-15> 공유자율주행자동차책임소재에대한의견 120 < 그림 4-16> 공차자율주행자동차책임소재의견 121 < 그림 4-17> 종사기간 130 < 그림 4-18> 주이용교통수단 131 < 그림 4-19> 통근거리및시간 132 < 그림 4-20> 차량보유대수 132 < 그림 4-21> 교통사고경험횟수 134 < 그림 4-22> 경험한교통사고의주요원인 ( 최근 5년 ) 134 < 그림 4-23> 경험한교통사고의주요요인 ( 전문가 ) 135 < 그림 4-24> 최근 5년간교통사고경험 136 < 그림 4-25> 교통사고의주요원인 136 < 그림 4-26> 교통관련 ICT 이용경험 137 < 그림 4-27> 사용중인스마트폰 SNS 계정수 138 < 그림 4-28> 교통관련 ICT 이용경험 139 < 그림 4-29> SNS 이용계정수 140 < 그림 4-30> 자신의성향인식 141 < 그림 4-31> 의사결정성향 ( 전문가 ) 141 < 그림 4-32> 현재이용차량의장착기능 ( 일반인 ) 142 < 그림 4-33> 현재이용차량의장착기능 ( 전문가 ) 143 < 그림 4-34> 차량기능별장착의사및지불의향가격 144 < 그림 4-35> 자율주행기능장착의사 ( 전문가 ) 146 < 그림 4-36> 3단계자율주행자동차장착의향기능 ( 일반인 ) 148 < 그림 4-37> 3단계자율주행자동차장착의향기능 ( 전문가 ) 148 < 그림 4-38> 3단계자율주행자동차이용의사비교 149
11 < 그림 4-39> 완전자율주행자동차이용의사 150 < 그림 4-40> 자율주행버스이용의사비교 151 < 그림 4-41> 완전자율주행택시이용의사비교 152 < 그림 4-42> 자율주행자동차소유시예상이용빈도비교 153 < 그림 4-43> 자율주행자동차공유이용의사 154 < 그림 4-44> 목적지까지의안전한이동가능성에대한인식 155 < 그림 4-45> 가족의안전한이동가능성에대한인식 159 < 그림 4-46> 도시부도로의효율적이동가능성 157 < 그림 4-47> 차량연비개선 158 < 그림 4-48> 시간의효율적활용 159 < 그림 4-49> 교통사고발생감소 161 < 그림 4-50> 무면허자 / 고령운전자 / 시각장애인의이용 162 < 그림 4-51> 개인정보제공 163 < 그림 4-52> 자율주행자동차운행의장점 164 < 그림 4-53> 자율주행자동차운행시우려사항 165 < 그림 4-54> 공용도로운행시다른차와구별필요 166 < 그림 4-55> 도시내부도로운행가능성과전용차선필요여부 167 < 그림 4-56> 공도로에서자율주행자동차를마주했을때반응 168 < 그림 4-57> 자율주행택시, 버스, 군집주행트럭운행의사 168 < 그림 4-58> 3단계자율주행기능차량운행요령교육의사 169
12
13 xiii 요약 1. 연구의개요 자율주행자동차의기술개발이급속히이루어지고자동차시장의선점경쟁이치열해짐에따라우리나라정부는자율주행자동차개발계획을수립하여연구개발사업에착수하였다. 우리정부는자율주행자동차시장의선점을위해 2020년까지상용화를목표로지원체계를구축하여시행하고있다. 국토교통부는자율주행을지원하기위한도로인프라및교통운영체계구축과관련기술개발지원및자율주행자동차도로운행을지원하기위한규제개선에주력한다는추진전략을구축하였다. 현재, 다양한측면의자율주행자동차기술개발이진행중이지만새로운기술을받아들이는운전자의수용성에대한연구개발은미흡하다. 자율주행자동차구입과운행에대한견해, 자동차운행에있어인간운전모드에서자동시스템운전모드로전환될때의운전책임과각각의역할, 자율주행자동차의도입에따른운전요구기능등에대한연구가필요하다. 자율주행모드운행상황에서돌발상황발생시자율주행자동차의선택에따른책임소재와윤리선택의문제를해결해야한다. 이는로봇기능을가진자율주행자동차가사고시인간과같은법적책임의주체가될수있는지, 또한자율주행자동차를움직이는인공지능 (AI) 이 No-Win 상황하에서도특정선택을하도록프로그래밍되어있어야하는지와같이단순공학, 과학적기술로서해결하기어려운문제로서, 로봇윤리에대한철학적, 심리적그리고사회학적접근이필요하다고판단된다.
14 xiv 가. 연구의목적 본연구의목적은자율주행자동차와관련된윤리와운행책임의개념을정리하고대응기술과정책방안을마련하는것과자율주행자동차기술에대한운전자수용성분석및개선방안을도출하는것이다. 자율주행자동차윤리개념을정립하고, 운전행태와윤리문제관계의분석을통한자율주행운전책임을규명하며, 관련대응기술과정책방안을마련하고자한다. 이를위하여자율주행기술수준에따른운전책임의변화와관련된쟁점의분석, 자율주행자동차관련윤리개념과운전책임에대한개념정립하고자한다. 또한, 자율주행자동차기술개발및적용에따른운전자수용성분석과개선방안도출하기위해자율주행자동차의도입에따른쟁점및문제를분석하고, 운전자수용성개선방향및개선방안을제시하고자한다. 나. 연구의범위 연구의범위는자율주행자동차의기술개발과정책현황분석, 자율주행자동차의윤리기초연구, 자율주행자동차의운전자수용성기초연구로구분할수있다. 자율주행자동차의기술개발과정책현황분석은자율주행자동차의개념, 기술수준, 서비스분석, 기술발전전망, 상용화시기, 기술개발방향전망, 부처별정책지원, 현안및쟁점분석으로한다. 자율주행자동차의윤리기초연구에서는자율주행관련윤리개념정립, 윤리문제발생이유와원인분석, 대표적윤리문제정의및설문조사분석을포함한다. 자율주행자동차의운전행태와운전자수용성기초연구에서는자율주행자동차기술과윤리와의관계, 윤리실험, 자율주행자동차의수용성조사분석등을포함한다.
15 요약 xv 2. 자율주행자동차기술개발및현황분석 가. 자율주행자동차기술의개념 자율주행자동차는자동차가스스로주행환경을인지하여위험을판단하고주행경로를제어하면서운전자의주행조작을최소화하며차량스스로운전하는자동차를의미한다. 자율주행자동차는통신장비없이차량에장착된인지센서만을활용하여주행하는 Autonomous Vehicle 과외부와통신을유지하며주행하는 Automated Vehicle 로구분할수있다. Automated Vehicle 은주행중자동차의경우외부통신과항상연결되어있어야하기때문에최근자율주행자동차는 CAV (Connected Automated Vehicle: CAV) 로정의하는경향이강하다. 자율주행기능을구현하기위하여주행중주변환경을인지하는기술로센서, 정밀지도및측위, V2X 통신기술이필요하며, 인지된환경정보와운행정보의퓨전을통해주행제어를선택하기위한판단기술과판단기에서결정된명령을전달받아직접차를제어하는엑츄에이터기술로구분된다. 자료 : 최정단 (2016), Global Auto News(2014), 언멘드솔류션홈페이지참조하여작성 < 그림 > 자율주행을위한기술개념
16 xvi 일반적인자율주행은인지 ( 도로, 교통상황등 ), 판단 ( 상황대처 ), 제어 ( 차량제동 ) 등의일련의과정을거쳐수행하게된다. 따라서보다정확하고빠르게주변상황을인지할수있어야하고, 이를위해센서와함께 V2X, 정밀지도등을종합적으로활용하고있다. 출처 : 현대자 ᅟᅩᆼ 차공식블로그 <blog. hyundai.com>, 접속 < 그림 3> 자율주행프로세스 나. 자율주행자동차기술단계정의및운전자역할미국의도로교통안전청인 NHTSA (National Highway Traffic Safety Administration: NHTSA) 와미국자동차기술협회인 SAE(Society of Automotive Engineers: SAE) 에서자율주행기술단계를정의하고있다. NHTSA 에서는자율주행자동차를 ADAS 기능이없는일반적인차량에서부터완전자율주행까지의 5단계로구분하고있다. 0 2단계까지는주로 ADAS와같은기능이탑재되었다고본다면, 3단계는제한적자율주행, 4단계는완전자율주행의형태로구분하고있다. SAE 에서는자율주행자동차의기술수준을 6 단계로구분고, 0~3 단계까지는 NHTSA 의구분과유사하다. 그러나 3단계이상의자율주행자동차의기술수준구분함에있어 NHTSA 의 4단계를한단계더세분화하여 4단계와 5단계
17 요약 xvii 로구분하였고, 도로부문역할의중요성을제시하였다는특징이있다. < 표 1> SAE 와 NHTSA 의자율주행기술단계정의 단계정의개요기술운전자역할 Lane departure 비자동 - 항시동적운전에대한 Level warning - 운전에대한모든것을 (No 모든것을운전자가담 0 LKA Type I 운전자가담당 Automation) 당 Blind spot warning Level 1 Level 2 Level 3 Level 4 Level 5 운전자보조 (Driver Assistance) 부분자율주행 (Partial Automation) 조건적자율주행 (Conditional Automation) 고도의자율주행 (High Automation) 완전자율주행 (Full Automation - 운전환경정보를이용하여핸들조향과가속 / 감속중하나의기능 CC 에대해서운전자를도 ACC 와주는단계 LKA Type II & III - 그외다른동적운전에대해서는운전자가담당 - 운전환경에대한정보를이용하여핸들조작과가속 / 감속모두에대해서운전자를도와주는단계 - 그외다른동적운전에대해서는운전자가담당 - 운전자의적절한대응을전제로모든동적운전을자동화하는단계 - 운전자의적절한대응없이도모든동적운전을자동화하는단계 - 사람이운전할수있는모든도로와환경적조건에서완전한자동화가가능한단계 Traffic Jam Assistance Key Parking Traffic Jam Chauffeur Driverless Valet Parking Traffic Jam Pilot Urban robot taxi Universal robot taxi - 운전자는계속주행환경을주시하면서차선유지혹은차간거리유지외다른필요한운전기능은반드시수행 - 운전자는도로주행환경을반드시모니터링해야하고시스템은차선유지와차간간격등을자동유지 - 운전자는차내에서독서, 문자, 전화등을해도되지만필요시에는제어권을받아운전할수있도록대기 - 운전자는잠을잘수도있고, 시스템은필요시위험도가최소화하도록조치가능 - 운전자불필요 다. 자율주행자동차기술개발방향 1) 완성차업체 (car makers) 의기술개발방향 완성차업계에서는 자율주행 을운전의불편함을줄여주는기능으로, 지능
18 xviii 형운전자보조시스템 (ADAS 의기술을발전시킨형태로보고있으며, 완전자율주행단계라고하더라도운전자의존재는있는것으로설정하고운전의지루함과불편등의해소를통해사고위험성은줄이면서, 운전의즐거움과개인의이동공간으로서의차량개념은그대로남기는방향이라고할수있다. 현재완성차제작자의자율주행자동차기술개발목표는대체로 ADAS 의관점에서 NHTSA 가정의한자율주행기술 3 수준의기술을개발하는것이다. 기술수준 3단계에서자율주행자동차는운전자가항상필요하며, 위급상황시에는운전자에게제어권을전환해야한다는관점에서기술개발을추진하고있다. 따라서자동차전용도로등비교적단순하고통제된환경에서의장거리이동시운전자의피로도를낮춰주는것을목표로하는경우가많았다. 그러나최근급격하게발달하는기술에맞춰레벨 4를목표로수정하는경향을보이고있다. 기술개발전략은기존차량의자동감응식순항제어 (ACC; advanced cruise control) 및혼잡구간주행지원시스템 (TJA; Traffic Jam Assist) 과같은지능형운전자보조시스템 (ADAS; Advanced Driver Assistance System) 에자율주행기능을점진적으로부가하여완전한자율주행에이르고자하는전략을구사하고있다. 따라서완성차제작사에서는차량전체의안전성, 안정성, 보안성을매우중요하게다루고있다. < 표 2> 주요완성차업체사례 구분기업내용 자동차기술개발동향 포드 (Ford) GM 볼보 (Volvo) 년 1 월에자율주행테스트차량을기존의 3 배인 30 여대로늘림. 완성차업체중최대수치 - 눈 (snow) 덮인도로환경에서도테스트진행시작 - 기존 ACC( 자동감응식순항제어 ; adaptive cruise-control) 시스템에조향 (steering), 차선유지 (lane-centering) 기능을결합시킨수퍼크루즈 (Super Cruise) 기능을 2017 년출시계획. 차선변경이나방향전환기능은포함되지않음 - 운전자가핸들에서손을뗀경우, 눈의움직임을감지하여도로를모니터링하고있는지판단하는시스템도개발중 년까지일반도로에서 100 대의자율주행자동차를동시에운행하는프로젝트인드라이브미 (Drive Me) 진행중
19 요약 xix 구분기업내용 카세어링사례 인포테인먼트개발사례 르노 - 닛산 (Rena ult - Nissan) 기아 (Kia) 포드 GM 볼보 (Volvo) 토요타 (Toyota) - CEO 카를로스곤 (Carlos Ghosn) 은운전자가없는완전자율주행은목표가아니라고함 - 고속도로, 시내도로등모든지역에서완전자율주행은 2020 년까지가능예측 년까지 10 대의자율주행자동차를선보일계획 년에단일차선자율주행 (single-lane control), 2018 년에다차선자율주행 (multi-lane control) 기능을목표로하며, 최종적으로교차로등에서의자율주행기능까지완성시킬계획 - 부분적으로자율주행이가능한차량을 2020 년까지출시할계획이며, 완전자율주행자동차는 2030 년으로예상함 - 운전자의얼굴표정등을감지하여운전자가의식을잃는등응급상황발생시, 차량을도로변에주차하고도움을요청하는메시지를자동으로발송하는시스템을개발중 - 소규모그룹이차량 1대를공동으로리스 (lease) 해서공유할수있는서비스, GoDrive 등다양한공유서비스를개발및시험중 - 뉴욕시티 (New York City) 지역에서의카셰어링 (car-sharing) 프로그램인 Let's Drive NYC 서비스를개발 - 차량공유서비스 (ride sharing) 업체인 Lyft 에 5 억달러를투자하였고, 공유서비스 (ride sharing) 에특화된자율주행자동차를개발하기위한공동프로젝트를시작 - 우버 (Uber) 의경쟁사였던사이드카 (Sidecar) 를인수 - 에릭슨 (Ericsson) 과연합하여자율주행자동차에컨텐츠를제공하는시스템개발 - 자사의차량에모바일앱을적용시키는시스템으로포드 (Ford) 의오픈소스플랫폼인스마트디바이스링크 (SDL; SmartDeviceLink) 를적용할계획 - SDL 은구글 (Google) 의안드로이드오토 (Android Auto) 나애플 (Apple) 의카플레이 (CarPlay) 와유사한기능으로, 음성명령이나차량의기존인터페이스를통해서사용자와모바일앱을연결시켜주는시스템 2) IT 업체의자율주행자동차기술개발방향 IT 업체에서는자율주행자동차를개인소유및운전의필요성을없애는혁신적인기술로자율주행자동차를이용한카셰어링 (Car-Sharing) 및택시서비스를제공하는것이핵심기술이될것으로전망된다. 구글, 우버, 애플, Zoox 등의 IT 업체에서추구하는완전자율주행자동차의서비스이용대상은차량을직접소유혹은운행하지않는개인으로, 자율주행자동차의소유권은정부, 지자체, 교통서비스업체등이보유하는것을목표로한다. 이에따라 IT업체
20 xx 에서추구하는완전자율주행자동차의주요서비스는현재제공되는대중교통과유사하나제공되는서비스단위는다양할수있다. 목표로하는이용대상자는노약자, 어린이등교통약자, 차량운행이많지않은개인, 도시교통환경개선을추구하는지자체등이고할수있다. 3) 완성차 IT 업계의자율주행자동차개발방향비교 앞서살펴본바와같이 IT 업계와완성차업계에서바라보는자율주행자동 차에대한견해차이를주요쟁점별로정리해보면 < 표 > 와같다. < 표 3> 자율주행차를바라보는 IT 업계와완성차업계의관점 IT 업계주요쟁점완성차업계 바퀴달린스마트폰, 스마트폰이상으로인간생활과사업재창조 스마트카는제 2 의스마트폰인가? 구글및애플등 IT 업계누가주도하나? 년가능 빅데이터, 인공지능, 운영체제 (OS) 인간과비교할수없을정도로낮은사고율 완전자율주행자동차는언제가능한가? 스마트카의경쟁력은? 자율주행자동차의안전한가? 스마트한자동차, 안전과편의성측면에서조금더완벽한차완성차업계, 구글및애플은프랫폼공급자일뿐 최소 10 년이상걸릴것 디자인, 안전성등도중요한요소특정구간에서만자율주행을허용하는것이현실적 자료 : 중앙일보 ( ), < 접속 라. 자율주행자동차발전방향 1) 자율주행상호모니터링 부분자율주행및제한적자율주행모드주행에있어운전자와자율주행자 동차상호주시하는방향으로기술개발이이루어질것으로전망된다. 이는 자율주행자동차에서운전자로제어권을이전할때사고가발생할가능성이높 고, 사고발생시피해가높을것으로예측되기때문이다. 예를들면, 항공기의
21 요약 xxi 오토파일럿 (Autopilot) 의경우, 자동주행모드에서수동주행모드로변환하는 과정 (hand-over) 에서사고발생률이높게나타나며, 자율주행자동차도이에 대한대비가필요하다. 2) 자율주행자동차공유서비스미래자동차기술은인간운전자중심에서시스템운전중심의기술로발전해가는경향을보이고있고, 자동차의소유혹은공유에대한가치가상호대립하고있다고볼수있다. 자율주행자동차의기술개발에따라자동차의운전제어권이인간운전자에서시스템운전자로전이해가고있으며, 기술수준이높은자율주행자동차의소유혹은공유의관점에서서비스가제공되고있다. 소유를중심으로하는자율주행자동차기술은기존자동차제작사 (OEM) 에서개발 공급하는자율주행자동차로대표사는테슬러, 다임러, 아우디등이다. 또한운송수단으로서의차량은카-셰어링 (Car-Sharing), 로봇택시 (Robot Taxi) 등의발전으로인한자동차판매감소를예측한것으로볼수있으며, 궁극적으로는스마트시티 (Smart City) 형태로진화될것이라고전망되고있다. OECD ITF 에따르면, 도심교통환경에서자율주행자동차의영향에대해서분석한결과, 중간규모의유럽도시 (midsize European city) 에서경량전철 (light rail) 과연계하여자율주행자동차공유서비스를운영하는경우현재도심을운행하는차량의 10% 만으로도동일한수송능력을보일수있다고분석하였다. 3. 자율주행자동차윤리와책임문제 가. 운전프로세스의변화 자동차의운전행위는주변환경을눈으로인지하고, 이를두뇌에서판단하
22 xxii 여, 차로와속도등을결정하는끊임없는피드백과정이다. 운전자는운행중차량의내부상황과외부주행도로에서발생하는상황을눈으로인지하여자신의안전을극대화하고, 원하는목적지에효율적으로도달할수있도록뇌에서판단을하게된다. 운전자의뇌는주변상황인지정보를뇌에서처리하고주행의사결정을하게되며, 결정된주행전략은사람의손과다리를이용해자동차의브레이크혹은핸들을조작함으로서기계에전달하고, 차량을제어하게된다. 자율주행의운전프로세스도이와유사한과정을통해진행된다고볼수있다. 자율주행은차량에장착된센서를통해도로와운행환경을인지혹은모니터링하고, 판단기를통해차선, 속도, 경로등을결정하게된다. 이러한과정을통해결정된판단은엑츄에이터와같은제어기에전달되고, 그결과로차량이제어된다. 자율주행을위해주변도로와교통상황에따라운전관련의사결정을하는학습이지속적으로이루어져야하며, 윤리에대한고려는자율주행의거동판단프로세스를프로그램화할때부터검토되어야한다. < 그림 > 운전자및자율주행시스템운전프로세스 나. 자율주행기술과윤리 자율주행기술단계에따른윤리문제의개입정도를살펴보면, 자율주행의 수준이높아질수록운전자의역할은낮아지고, 차량의자율주행범위와역할
23 요약 xxiii 이커지게되며, 자율주행의수준이높아질수록기계의자율주행역할이높아지고, 윤리의문제도더높아지게된다. 자율주행이 2단계에서 3단계로발전해갈때제어범위, 자동화감지와대응능력, 운전자역할범위에큰변화가발생하고, 3단계에서 4, 5단계로변화될때또한운전자역할과운영범위의변화가크게발생한다. < 표 > 자율주행의단계와윤리 수준 자율주행을위한도로, 교통시스템역할 윤리 수준 1 운전자지원 - 일반차량과동일 - 운전자가전적으로윤리적책임 수준 2 부분적자동화 수준 3 조건부자동화 수준 4 고수준자동화 수준 5 완전자동화 - 차량의자동화기능향상을위한도로개선 - 교통시스템역할동일 - 운영구간에서의도로정비와책임발생 - 일부구간의특정조건에서도로, 차량, 교통정보제공으로자율주행의효율성증대 - 차량 - 도로간통신용도로인프라고도화, 도로정비와책임발생 - 고수준자동화조건에서경로, 차선선택을위한도로, 교통, 기상상황등제공 - 차량 - 도로간통신용도로인프라고도화, 도로정비와책임발생 - 완전자동화조건에서경로, 차선선택을위한도로, 교통, 기상상황등제공 - 운전자가대부분윤리적책임 - 시스템의윤리는거의관련없음 - 운전자는돌발상황대응시윤리적책임 - 시스템은조건부자동화운전시윤리적책임발생 - 운전자의윤리적책임은최소화 - 시스템의윤리적책임은최대화 - 시스템이전적으로윤리적책임 자율주행기술에있어인공지능은자동차기술뿐만이아니라도로인프라기술에도접목이필요하다. 자동차기술의인공지능화란자동차시스템이인간과동일한운전기능을구현한다고할때현재도로상에서발생하는한계는지속적으로발생할수있기때문이다. 인공지능에대한의존성이확대됨에따라자율주행자동차의안전에중요한영향을미치는다수의의사결정들이이미인공지능알고리즘에의해의존적으로이루어지고있으며, 앞으로이러한현상이더욱확대될것으로예상되는
24 xxiv 가운데알고리즘에의한불합리한의사결정에대한우려도증가된다. 인공지능알고리즘의자율성이악용되거나특정이해집단에의해특정윤리기준이나판단기준이일방적으로강요되는경우에도사회적으로중대한문제가발생할수있다는우려가있다. 그러나현재상기의알고리즘문제를다루는법제나정책은부재하며, 인공지능에의해피해가발생할경우책임소재의불명확성에따른손해전보나권리구제의어려움이지적되고있다. 현상태에서는법적책임소재가명확하지않기때문에기술개발은무리없이계속될것으로예상되지만섣불리법적책임소재가명확해진다면기술개발비용이증가하고그에따라관련제품이나서비스의시장가격이높아질수있기때문에기술개발이더뎌질것이라는시각도존재한다. 3. 자율주행자동차윤리및운전자수용성조사 가. 자율주행자동차윤리의개념 1) 자율주행자동차윤리와책임에대한선행연구최근활발히진행되고있는자율주행자동차윤리와책임에관한선행연구의공통점은현재혹은가까운미래에실현가능한기술수준의자율주행자동차의자율성정도는완벽하지않다는것에동의하고있다. 또한극단적인위기상황에대응하여자율주행자동차가안전한거동을결정할수있도록사전적인대응방안을마련하고, 그에따른법적책임과위험회피수단을마련해야한다는것에동의하고있다. Gurney(2016) 은자율주행자동차의윤리문제는자율주행자동차가운행중트롤리딜레마와같은상황을마주하게되었을때차량거동을결정할수있도록대응알고리즘개발이필요하며, 이를위하여윤리철학적인고찰과더불어사고발생시의책임을민법, 형사법및제조물책임법으로설명하였다.
25 요약 xxv 한편, 이상용 (2016) 은인공지능에대해법인격을부여하기보다는이용자를대신하여주어진역할범위내에서이용자를대리하는대리인으로보고계약법의관점에서인공지능의법적책임배분방안을논의하였다. 마지막으로 Schroll(2015) 은자율주행자동차가제공할수있는다양한교통서비스를고려하여향후사고위험을회피하기위한새로운보험제도를제안하였다. 자율주행자동차의책임에대한계약법적검토와보험제도검토결과자율주행자동차의사고위험에대한정보는이용자보다는제작사와교통서비스제공자에게더많기때문에이를효과적으로회피할수있을것으로보았다. 2) 자율주행자동차윤리의개념자율주행자동차는 ' 현상적차원 ' 에서 운행의목적상 부분적으로자율적주체인것처럼행동할수있으므로, 그목적상자율적주체성을인정할수도있지만, 기본적으로윤리의객체이고, 운행과관련된윤리적문제는윤리주체인 인간 의문제가된다. 따라서자율주행자동차운행과관련된윤리적명령은인간이어떻게자율주행자동차를설계, 제조, 사용할것인가에대한윤리적문제를다루는것이될수있다. 자율주행자동차가인간을대신하여스스로운행함에있어자율주행자동차는운행환경을인식하고운행제어결정을내리는데, 통상그운행결정이윤리적판단문제를요하는경우는거의없다. 그러나아무리기술적으로진보하더라도기후 환경적요인및기타요인으로인해예상하지못한사고상황이발생할수있고, 이경우예외적으로윤리적판단이필요한경우가발생한다. 이때자율주행자동차가윤리적판단을내릴때어떤기준에의하여윤리적판단을내리도록할것인가가문제이다. 자율주행자동차가실제로운행되면확률적으로낮지만윤리적판단이요구되는예외적상황이발생할수있다. 이러한상황에대한어떤윤리적판단이행해져야하는가에대해서는 다양한견해 가제시될수있고, 그타당성에대한 해답은하나이상이존재 하거나혹은 해결이상대적 일수있다.
26 xxvi 따라서자율주행자동차의운행시윤리적판단이필요할경우자율주행자동차가어떻게행위할것인가를프로그램하는일은어떤 논리기준에의거한윤리적판단 의문제일수도있지만, 제조자가구체적문제에대한사회구성원에대해정보를제공하고소통을통해그문제에대한 다양한해결책 중어느해결책을선택할것인가에대한넓은공감대를형성하는해결방식이라고할수있다. 나. 자율주행자동차의법적책임과보험 1) 자율주행자동차의법적책임 자율주행자동차도입을위하여고려해야할법제도는 < 표 > 와같다. < 표 > 자율주행과연관된기존법제도현황 법률 보험제도 비고 관련법령및제도 관련개선사항 자동차의운행 자동차관리법자율주행자동차안전기준등도로교통법운전자의정의 운전자의정의, 교통사고의처리자동차손해배상보장법자동차손해배상책임및손해배상교통사고처리특례법운전자의정의에따른처벌규정 교통사고책임 민법 ( 불법행위책임 ) 제조물책임법제조물책임의입증관련사항 자동차보험제도 자동차보험요율제도자동차보험약관 기타관련보험 제조물배상책임보험기타자동차보험등 자율주행자동차의운행과관련해제3자에대한손해가야기된경우, 자동차제조자, 소유자, 및이용자는자동차의판매혹은운행으로인하여이익을누리고있으므로, 발생한손해에대해서는각수익자가제조상결함혹은운행상결함으로인한것임을입증하지않는한, 공동으로손해배상책임을지도록할필요가있다.
27 요약 xxvii 공동손해배상책임에대해제조자와운행자사이의책임을어떻게분배하는가에대한문제는위험에대한공동의기금을설치하고, 각당사자의과실부분을판단함으로서책임을분배할수있을것이다. 그러나자율주행자동차가개입된사고발생시당사자의과실부분을판단하여책임을배분하는것은매우어려운일이될수있다. 특히시스템의결함으로인한사고의발생인가는피해를입은제 3자혹은소유자및운영자가파악하는데한계가있을수있다. 이러한시스템의결함은제작자편에서더많은정보를보유하고있으며, 이를회피할수있는가능성이더많을것으로판단된다. 따라서자율주행자동차사고책임배분에있어최소비용회피자의원칙 (the least-cost avoider principle) 의적용을검토할필요가있다. 2) 자율주행자동차의윤리와보험자율주행자동차의딜레마상황에대한사전적대응의일환으로윤리알고리즘의개발이필요하나딜레마상황에서의선택과그에따른예상결과를고려하여윤리적용기준을고민할필요가있다. 자율주행자동차가개입된사고발생시현행재산법및자동차손해배상보장법체계를적용하기에는자율주행자동차특성이다소부적합한면이있어개선이필요하다. 자율주행자동차는운전자의전방주시의무가일반차량에비해현저히낮아질수있으며, 자율주행자동차의책임을묻기위해운전자의책임이없음을입증해야하는난제가발생한다. 따라서자율주행자동차의윤리알고리즘개발에필요한자율주행자동차가개입된자동차사고에있어책임소재, 책임의정도및이를판단하는윤리기준을제시하기위한고민이필요하다.
28 xxviii 4. 자율주행자동차윤리및수용성조사 자동차운행시발생하게되는딜레마상황에서인간의선택은언제나이성적이라고할수없다. 이는너무나갑작스러운사고발생에대해기술적으로대응할수있는시간을확보하는것이어렵거나, 개인적인선호가선택에작용하거나, 혹은인간의이기심때문이라고할수있다. 이에따라현행법규범은사고발생시자연스러운정황적상황을고려하여책임을분할하고있다. 또한딜레마상황에서의선택이후책임의유무, 과실의경중, 고의성의유무에따른피해자구제제도가운영되고있다. 자율주행자동차가도로운행중직면하게될딜레마의사례도운전자운행시와유사할것이다. 자율주행자동차의정보인식, 판단및제어기능은인간의한계를능가할것으로보고있으나기술적인우월성으로극복할수없는딜레마상황은지속적으로발생할수있다. 따라서자율주행자동차가직면하게될딜레마상황에서판단할수있는알고리즘의개발및적용을통해딜레마상황에서대응할수있도록대비할필요가있다. 사전적대응의일환으로딜레마상황에대비한자율주행자동차의최적거동알고리즘개발필요하며, 최적화기준마련을위한사회적합의도필요하다. 가. 자율주행자동차윤리판단기준의필요성및사례분석 자동차가어린이와노인을마주하여피할수없는상황에직면하였을때양자의기대수명에따른미래효용을비교하여어린이의생명을존중하는쪽으로선택할경우노인의생명존엄에대한정당성이희생될수있다. 이러한운전자의선택딜레마상황에서어떠한선택을하는것이윤리적으로정당한가에대한판단은매우어려울수있다. 자동차가마주하는보행자가 1인인경우와 10인의생명을비교하여공리론적윤리론에입각하여다수의생명을구하는방향의선택을한다고할때, 1인의희생이강요되는상황이발생할수있다. 이경우, 다수의이익을위하여
29 요약 xxix 1인의희생을강요하는것이바람직한선택인가에쉽게답할수없을것이다. 마찬가지로자동차가마주한보행자를희생하지않기위하여, 자기차량의피해가명확한혹은운전자의생명이희생되는선택을할수있는운전자는극히드물것으로판단된다. 또한타인이생존과자율주행자동차의파손및탑승자인명피해를비교하여타인의생존으로자율주행자동차의책임을회피한경우자율주행자동차소유자의희생을강요하는결과를초래할것이다. 자율주행자동차의불가피한사고상황에서공리주의윤리론에따라인명피해를최소화하는선택을하였으나, 결과적으로다수의편익을최대화하지못하는역선택의문제를최래할수있다. 안전장구를갖춘혹은갖추지않은이륜자동차사례뿐만이아니라차량의크기에따른피해정도혹은충돌안전장치가많이설치된고가의차량과그렇지않은차량의사례에서도발생할수있는문제가될수있다. 충돌로인한사고의피해정도는사고가발생한이후에실현된다. 사고발생바로직전까지, 운전자혹은자율주행자동차는정확한피해의정도는알수없고, 다만확률에따른예측을할수있는것이다. 만일자율주행자동차가마주오는차량혹은보행자와자신의차량중하나를선택해야하는상황에직면했을때, 자율주행자동차의선택의결과가확률만제공하게된다고할때자율주행자동차의선택의윤리문제는더욱복잡해질수있다. 나. 자율주행자동차윤리인식 최근자율주행자동차와관련된윤리인식에관한실험적방법론을적요한고찰이활발히진행되고있다. Bonnefon 외 (2015) 는자동차운행중직면하게될윤리적딜레마상황을상정하고이에대한평가를윤리실험방법을적용하여수행하였다. Martin & Cushman (2016) 은윤리실험을통해피험자들이좋은의도를가지고행한행동이나쁜결과를초래한경우, 강제적으로좋은행동을하였으나나쁜결과를초래한경우보다더높은수준의처벌을원한다는것을실험을통해보였다. Steven Levitt 외 (2007) 는행동실험을통해개
30 xxx 인의사회적선호의정도를도출할수있다고하였다. 이를위해다양한형태의최후통첩게임 (Ultimatum Game) 을설명하고실험설계에따라어떻게피험자들이사회적선호를발현하는지정리하였다. 이러한이론적근거를바탕으로자율주행자동차윤리선택에대한실험을수행하기위한시나리오로자율주행자동차탑승자자신과보행자 10명이충돌하는상황을설정하였다. 실험의절차는 3단계로진행하였는데, 1단계에서는실험참가그룹을두그룹으로나누고 1그룹은탑승자입장에서윤리딜레마상황시선택을하도록하였고, 다른그룹은 1그룹의선택에대한평가를하도록하였다. 마지막으로 1그룹에게다른사람의평가를피드백해주고, 다시선택하도록하여윤리딜레마에서의선택에있어사회성이영향을미치는가를평가해보고자하였다. 또한사고의결과를확률로제시할때와사고의정도를제시하였을때받아피험자들에게어떠한영향을미치는가를보았다. 또한탑승자자신이개입하지않는상황 ( 헬멋을착용 / 미착용이륜자동차운전자와의충돌상황 ) 에서의윤리적의사결정, 도로교통법규준수의정도및책임소재에대한인식을조사하였다. 1) 자율주행자동차윤리인식실험의결과실험결과피험자들은전반적으로타인의피해를줄이는방향의선택을한것으로나타났으나, 자율차의탑승자가피해를볼확률이 100% 인시나리오에서 75.3% 의참가자는탑승자자신을보호하는선택을한반면, 방향을전환하여보행자를보호해야한다는응답자가 24.7% 로나타났다. 또한, 사고피해정도를제시한경우에는 17% 의참가자들이차량거동을전환하여보행자를보호하는선택을하여확률을제시한경우보다 7.7% 의차이를보여좀더민감한반응을보였다. 반면두실험결과에서탑승자의피해가없음에도계속주행을선택한극단적이기주의자는약 6% 정도인것으로나났다. 평가자입장인두번째그룹의평가에서는그룹1의응답패턴과유사한응
31 요약 xxxi 답을한것으로나타났다. 그러나극단적인상황에서그룹1의참가자들과는다소다른선택을하였다. 실험그룹 2는자율주행자동차에게불리한선택에대해동의하지않는응답자가더많은것으로나타났다. 헬멧을착용한이륜자동차와착용하지않은이륜자동차중한쪽을선택하여충돌해야하는상황에서는 66% 의참가자들이헬멧을착용한이륜자동차의운전자와충돌할것을선택하여역선택 (Adverse selection) 의문제에노출되었다. 2) 자율주행자동차의준법정도와책임소재자율주행자동차의도로주행중교통법규준수의정도와관련하여, 일반인과전문가모두철저히준수해야한다는의견이지배적인것으로나타났다. 일반인운전자의 73%, 비운전자의 78%, 전문가의 67% 는교통법규를철저히준수해야한다고응답했다. 탑승자가타지않은자율주행자동차가도로주행중발생한책임의소재를물었을때, 일반인은제작자와소유자모두균등하게책임이있다고한반면, 전문가의의견은다소차이를보여전문가의과반수인 52% 가아무도타지않은자율주행자동차가도로운행중발생한책임은제작자에게있다고응답하였다. 그러나전문가의 16% 만이소유자에게책임이있다고하여, 아무도타지않은자율주행자동차의경우소유자보다는제자가더많은정보를가지고있기때문에이를회피할수있는기회가상대적으로많다고보는것으로판단해볼수있다. 이렇게아무도탑승하지않은공차자율주행자동차가발생한책임소재에대한문제는향후자율주행자동차의이용활성화에많은영향을미칠것으로예견되며이에대한논의가지속적으로이루어져야할것으로판단된다.
32 xxxii 다. 자율주행자동차의운전자수용성 1) 자율주행자동차수용성조사설계자율주행자동차등장에따른운전행태변화예측을통한관련기술개발을위한운전자수용성을조사는필수적인요소라고할수있다. 자율주행자동차의수용성을진단하는중요요소는자율주행자동차의이용가능성과자율주행자동차이용에따른통행특성변화를고려해볼수있다. 자율주행자동차의이용가능성에영향을미치는요소로는자율주행기술에대한신뢰성, 이용편의성및효율성, 경제성이가장큰영향을미칠것으로판단된다. 비영업용자동차이용자의자율주행자동차수용성조사항목은이용가능성, 자율주행자동차에대한선험적인식, 자율주행기술에대한지불용의가격과더불어, 자율주행자동차의윤리와책임에대한의식조사가필요하다. 영업용자동차운전자의경우개별기술에대한인지도 ( 버스, 택시, 및화물차군집주행등 ), 선험적선호및인식, 기술습득의사및이용의사등의조사가필요하다. 이상의조사목적을바탕으로일반인 700명과교통및자동차관련기술 / 정책전문가 75명영업용버스 / 택시 / 화물자동차직업운전자 220명을대상으로조사하였다. 2) 조사결과 1 자율주행기능별이용의사 3단계자율주행자동차전반에대한이용의사는상대적으로자율주행자동차에대한지식이높은전문가의이용의사가높게나타났다. 일반인운전자의 53% 및비운전자의 50% 는이용의사가있다고응답했고전문가의 68% 는 3단계자율주행자동차의이용의사가있다고긍정적인응답을하였다. 완전자율주행자동차이용의사도 3단계와유사한경향을보이고있는데, 일반인에비해전문가의이용의사가높게나타났다. 일반인운전자의 56% 와비운전자 51% 가
33 요약 xxxiii 완전자율주행자동차이용의사가있다고응답한반면전문가의경우 67% 가이용의사가있다고밝혔다. 완전자율주행버스이용의사를물었을때일반인운전자혹은비운전자에비하여전문가의이용의사가높은것으로조사되었다. 일반인운전자의경우자율주행버스이용의사는 35% 이고, 비운전자의경우 27% 인데비해문가의이용의사는 48% 로타나났다. 자율주행택시에대한이용의사를물었을때이용하겠다는의견보다는보통이라는중립적인의견과이용하지않겠다는의사가더높게나타났다. 일반인운전자의 33%, 비운전자의 26% 가이용의사가있다고응답했고, 전문가의경우 37% 가이용의사가있다고응답했다. 자율주행자동차를공유로이용할것인가를물었을때일반인운전자의 45% 가이용하겠다고한반면비운전자의 36% 와전문가 37% 만이이용하겠다고응답하여일반인운전자보다낮게나타났다. 2 자율주행자동차인식직업운전자들은일반인과전문가에비해자율주행자동차를이용한이동에대해부정적인인식을하고있는것으로나타났다. 일반인운전자의 23%, 비운전자의 22%, 그리고전문가의 18% 만이부정적인인식을하고있었으나직업운전자의경우 46% 가부정적인인식을하고있는것으로나타났다. 자율주행자동차가나의가족을안전하게목적지까지이동시켜줄수있을것인가에대한인식을살펴보았을때일반인과전문가에비해직업운전자들이부정적이인식을하고있는것으로나타났다. 부정적인의견은일반인운전자 29%, 비운전자 25%, 전문가 27% 를보인반면직업운전자의과반수인 51% 가부정적인인식을하고있는것으로나타났다. 시간의효율적활용에대한인식은향후자율주행자동차이용자의편익항목가운데가장중요한역할을할것으로판단된다. 일반인운전자의 53% 와비운전자의 43% 는자율주행자동차로이동하는동안업무, 독서, 대화등좀
34 xxxiv 더효율적인다른일을할수있을것으로기대하고있는것으로나타난반면, 전문가 43% 와직업운전자의 57% 는시간활용에있어효율성이증대되지않을것에비관적인인식을하고있는것으로나타났다. 자율주행자동차의교통사고발생감소효과에대해일반인운전자의 43%, 비운전자의 40% 가긍정적으로인식하고있고, 전문가의 67%, 직업운전자의 25% 만이긍정적으로인식하고있는것으로나타났다. 자동차이용약자인무면허자, 고령운전자및시각장애인이자율주행자동차를단독으로이용할수있는가에대한인식을통해자율주행자동차의안전성에대한신뢰를살펴보고자하였다. 일반인운전자의 41% 와비운전자의 35%, 전문가의 48%, 직업운전자의 20% 만이자동차이용약자단독으로운행하는것에대해긍정적으로인식하고있는것으로나타났다. 자율주행자동차이용시에발생하는개인위치정보를주변다른차량과공공데이터베이스에제공하는것에대해전문가가가장긍정적인인식을보인반면, 직업운전자가가장부정적인인식을보였다. 전문가의 48% 는개인위치정보제공에대한거부감이없는것으로나타났고, 일반인운전자의 39% 와비운전자 30%, 직업운전자 33% 만이거부감이없는것으로나타났고, 운전자 30%, 비운전자 29% 는거부감이있는것으로조사되었다. 자율주행자동차운행의장점을물었을때일반인운전자의 51%, 비운전자의 55% 및전문가의 63% 는운전중졸음과운전미숙으로인해발생할수있는실수예방을통해교통사고발생이감소될것으로꼽았다. 반면우려사항에대해, 전문가의경우가장큰우려사항으로 26% 가자율주행시스템의고장으로인한교통사고발생을꼽았고, 일반인운전자의과반수 (51%) 와비운전자 44% 는자율주행시스템고장으로인한교통사고의위험증가를우려한것으로나타났고, 15% 는사고발생시책임소재의구분이모호한것을우려하였다. 자율주행자동차가공용도로를운행할경우다른차와구별될필요가있는가에대한질문에일반인운전자 82%, 비운전자 80%, 직업운전자 80% 는구별이필요하다고답하였다. 또한자율주행자동차를공공도로에서마주했을때반
35 요약 xxxv 응을묻는질문에서일반인운전자의 37%, 비운전자의 34%, 전문가 38%, 그리고직업운전자의 50% 가나와가까워지지않도록노력하겠다고응답하였다. 자율주행택시, 버스및군집주행트럭과같은영업용자율주행자동차의운행의사를물었을때자율주행버스의운행의사점수가 2.83으로가장높은반면, 자율주행택시는 2.76 으로가장낮았다. 또한 3단계자율주행기능이장착된차량을배차했을경우운행요령을익힐의사가있는가에대한질문에서전체응답자의 57.3% 가운행요령교육을받을의사가있는것으로나타났다. 5. 자율주행자동차윤리및수용성쟁점과대응방향 가. 자율주행자동차윤리와법적쟁점 1 자율주행자동차의윤리기준자율주행자동차운행에앞서발생가능한윤리적선택상황에대응한알고리즘을프로그램할필요가있으며, 이를위한윤리기준을정의할필요가있다. 도로운행중발생가능한윤리적선택상황은기본적인도로교통운행도덕에서부터트롤리딜레마와같은선택이어려운극단적사고상황과같이다양하다. 그러나단순히프로그램알고리즘에따라행동하는자율주행자동차가경미한도로교통법규를위반하는선택을할수있도록설계할수있을까에대해서는다수의사람들이합의하는기준이모호하다. 일반인은시스템이운전할때와사람이운전할때도로교통법규준수를동일하게보고있다. 자율주행자동차의교통법규위반가능성에대해일반인운전자의 73% 와비운전자의 78%, 전문가의 67% 는자율주행자동차는안전을위해법규를엄격이준수해야한다고응답하였다. 그러나타인의생명혹은자신의피해의정도가큰상황에서도공리주의적인선택을할것인가에대해조사응답자들이이중적인기준을적용하고있는것으로나타났다. 자율주행자동차의운전자가전방에나타난이륜자동차운전
36 xxxvi 자중하나와충돌해야만하는시나리오에서일반인 (80% 이상 ) 은충돌사고발생에따른피해를최소화하는공리주의적인선택을하였다. 반면, 자신이탑승한자율주행자동차의경우응답자 (83%) 는보행자 10인을보호하는선택보다는자신의피해를최소화하는선택을하였다. 자율주행자동차의윤리알고리즘을설계하는윤리기준을고민하면서, 일반적인다른도로교통법규를설계하는것과마찬가지로공리주의적인기준에따라설계를한다고하면, 정부는사회와자동차제작사들로부터이러한윤리기준이적절하다는합의를도출하는것이가능할것인가는아직까지미지수다. 진화심리 (Evolutionary Phycology) 입장에서자신의유전자를공유하고있는자식, 가족과친인척, 나아가부족혹은민족등으로그범위를확장할수있으며, 이들의생명을유지시키기위하여호혜적인 (reciprocity) 입장에서이타심 (Altruism) 이발현된다고 Dawkins(1989) 는주장하였다. 이러한이타심은자율주행윤리실험결과중자신을희생하여이타적인선택을한응답자 17% 의행태를설명해줄수있을것으로판단된다. 또한향후자율주행자동차의윤리기준을공리주의적인입장으로설계한다고할때사회적으로다수가합의할수있는기준이마련될수있다고볼수있다. 향후정부에서제시하는자율주행자동차에대한윤리기준에합의할수있는가에대한논의가더필요할것으로판단된다. 이를위해자율주행자동차윤리기준에대한사회적합의를이룰수있는실험철학의시나리오를좀더정교히가다듬고, 실험에적합한통제된환경을마련하여진행할필요가있다. 2 자율주행자동차기술단계별윤리적책임자율주행자동차의윤리딜레마상황에서의의사결정시고려해야할대상과윤리적책임소재에대한인식은자율주행자동차윤리선택에대한책임의주체와윤리기준을정하는데중요한정보가될수있다. 자율주행자동차가극단적딜레마상황의선택결정에있어자율주행자동차의운행지배권에대한의견은일반인과전문가의의견에있어많은차이를
37 요약 xxxvii 보이고있다. 윤리적의사결정의주체로일반인의과반수가자율주행자동차탑승자라고가장많이선택한반면, 많은전무가들이정부및법률로정해야한다고응답하여차이를보이고있다. 전문가들이딜레마상황에서의선택을정부정책및법률로정해야한다고한것은완전자율주행자동차의알고리즘개발에있어극단적인사고상황에대비할수있도록윤리가이드라인혹은법규범으로정해야한다는견해가반영된것으로판단된다. 반면일반인은실험시나리오상자율주행자동차탑승자의입장이되어본경험이있기때문에전문가들보다는직관적으로자율주행자동차탑승자가딜레마직면시상황결정권자가되어야한다고응답한것으로판단된다. 따라서자율주행자동차윤리선택알고리즘의설계기준을정함에있어전문가와일반인의인식차이를좁힐수있는노력이필요하다. 2) 자율주행자동차수용성관련쟁점 1 자율주행자동차에대한인식자율주행자동차에대한인식의정도는향후자율주행자동차의확산에영향을미칠수있다. 자율주행자동차운행에따른장점과단점을물었을때운전자의인적요인으로인한교통사고발생감소를가장많은응답자들이장점으로선택하여교통사고발생감소에대한기대가큰것으로나타났다. 반면자율주행시스템고장으로교통사고가발생할수있다는것을가장큰우려사항으로보고있어, 인적요인으로인한교통사고발생의감소를기대하지만아직까지자율주행시스템의기술적신뢰성은낮은것으로판단된다. 자율주행자동차를이용하여목적지까지안전하게이동할수있을것이라는항목에서일반인운전자와전문가는긍정적인의견이많은것으로나타났으나가족을안전하게이동시킬수있을것이라는항목에서는긍정적으로인식하고있는응답자들이감소하였다. 이는가족, 특히자녀를안전하게목적지까지의이동을도모함에있어아직까지는자율주행자동차가부모의역할을대
38 xxxviii 신할수없다고인식하는응답자가많은것으로판단해볼수있다. 시간의효율적활용, 즉평소자가용자동차로이동하는동안운전에집중하는것이외의다른활동을할수있을것이라는기대는일반인운전자가가장긍정적인기대를하고있는것으로나타난반면, 전문가와직업운전자는큰기대를하고있지않은것으로나타났다. 교통사고감소부문에있어많은전문가들이교통사고발생감소효과가있을것으로기대하고있으며, 무면허자 / 고령운전자 / 시각장액인의단독이용가능성에대한기대는전문가가가장높은것으로나타난반면, 직업운전자의경우부정적인인식이높은것으로나타났다. 개인위치정보를공공데이터베이스에제공하는것에대한거부인식은 30% 내외로조사그룹별로큰차이를보이고있지는않다. 개인위치정보는자율주행자동차의운행안전성확보를위하여도로인프라에서필요한정보나개인정보를보호하고자하는개인의의지또한중요한요소이다. 향후정부에서는개인위치정보제공범위에대한의사결정에있어개인정보보호의원칙과공익적편익추구원칙의균형을유지하는것이매우중요할것으로판단된다. 이문제는향후자율주행과도로인프라의협력이증대함에따라주요쟁점으로대두할것으로판단된다. 개인의정보보호에치중하여기술의발전을저해하고, 공익을저해하지않도록적정공개수준과원칙을마련할필요가있다. 직업운전자의자율주행자동차에대한인식질문에서부정적인입장을보이는것으로나타났다. 완전자율주행자동차의도입은일반운전자들에게기대와불안을동시에제공한다고할수있으나, 직업운전자들에게는자신의직업영역과경쟁관계에놓이게될가능성이높기때문인것으로판단된다. 특히개인택시운전자들에게는공유자율주행자동차및자율주행택시와같은새로운수단의등장으로직접적인위협으로작용하게될것이다. 특수집단의이익과공익의충돌로인하여발생하는갈등을완화하기위한방안마련이필요한것으로판단된다.
39 요약 xxxix < 표 > 자율주행자동차에대한인식비교 비고 운전자 (%) 비운전자 (%) 전문가 (%) 직업운전자 (%) 긍정중립긍정중립긍정중립긍정중립 목적지까지안전한이동가능성에대한인식 가족의안전한이동가능성에대한인식 도시부도로의효율적이동가능성 차량연비개선 시간의효율적활용 교통사고발생감소기대 무면허자 / 고령운전자 / 시각자애인단독운행 개인위치정보공유에대한인식 평균 자율주행자동차기술단계별이용의사전반적으로자동제동장치와자동주차시스템에대한장착수요는높은것으로나타난반면과속방지시스템과적응식정속주행시스템에대한가격이낮게나타나자동차속도조절과관련된기능의선호가낮은편이고, 자동제동장치와자동주차시스템과같이제동및조향장치를사용하는기능에대한선호가높게나타났다. 3단계자율주행자동차이용의사에서일반인운전자와비운전자의이용의사는과반수이상으로나타났고, 전문가의경우 68% 로비교적높게나타났다. 이와대조적으로교통서비스와관련된이용의사는상대적으로낮게나타는이중적인모습을보이고있다. 서로유사한기능을하는택시와공유자율주행자동차에대한이용의사에서차이가크게발생하는것은일반인이이들자율주행서비스에대한인식이아직까지낮기때문인것으로유추해볼수있으며, 자율주행기능과서비스에대한홍보가필요한것으로판단된다.
40 xl 3 도로공용에대한의견자율주행자동차의이용자뿐만이아니라도로를공유할주변차량의자율주행자동차에대한수용성또한중요한요소로안전한도로이용을위해일반대중에게자율주행자동차가어떻게인식되는가를검토할필요가있다. 완전자율주행자동차가공용도로를주행한다고할때다른차와구분이될필요가있다고한응답자는 80% 이상인것으로나타났다. 또한완전자율주행자동차를위한전용차선이필요한가에대해일반인과적업운전자의 60% 이상, 전문가 46% 가필요하다고하였다. 또한도로운행중자율주행자동차를대면할경우어떻게대응하겠느냐는질문에일반인과전문가의 35% 이상, 직업운전자의 50% 가가까이하지않도록노력할것이라고응답하여아직까지자율주행자동차와나란히운행하는것에대해비교적부정적인입장을보이고있는것으로판단된다. 이러한입장은설문조사결과자율주행자도차가운전자없이도심을통행하는것에대한부정적인인식, 다른차량과구분이될수있는표식이있어야한다는것과별도의차선을마련해야한다는분리인식, 그리고가까이다가가고싶지않다는인식이높게타나난것에서유추할수있다. 3) 윤리와수용성쟁점의대응방향 1 윤리딜레마대응알고리즘자율주행자동차와관련된윤리쟁점에대응하여자율주행자동차윤리알고리즘의프로그램원칙과기준이필요하다. 자율주행자동차윤리알고리즘의기본은공리주의가되어야할것이다. 이는현재자동차관리및도로교통관련법령의입법윤리기준이공리주의이기때문에자율주행자동차윤리기준에있어다른도덕기준을제시한다고한다면혼란이발생할수있기때문이다. 다만, 현재의제도는극단적인사고상황을미리고민하지않고사고가발생한경우사례별특성을고려하여사후적인조치를한다는것과적발의기대
41 요약 xli 가아주낮은경미한법규위반에대한처벌의문제를고민하지않고적발시에만관계자의의도와주변상황을고려하여처벌하는것이다른점이다. 그러나자율주행자동차는적발의기대가아주낮은경미한법규의준수문제에서부터발생할확률이극히낮은극단적사고상황까지종합적으로고려하여프로그램해야하는문제가있다. 이러한법규범준수에대한윤리적문제와극단적사고상황에서의윤리적선택문제에는개인의편익과공공의이익에대한고민을반듯이포함해야한다. 현재의사후적사고사례에대한처벌을판단하는것과유사하게발생가능한모든사례를고려한알고리즘을개발하여프로그램하는것은다소낭비적인요소가있을수도있다. 이는현재가까운미래에실현될수있는기술을대상으로윤리알고리즘을고민하는것과먼미래에실현될기술수준의차이가발생하게된다면, 현재기준의알고리즘의유용성이떨어지는문제가발생할수있다. 이렇게자율주행자동차의윤리알고리즘개발을위한기준을정하는것은과거, 현재, 미래를아우르는철학적고민과더불어기술적미래예측까지포함하여고민할필요가있다. 2 윤리적선택책임배분을위한법적정의윤리적선택이개입된사고발생시사고당사자의주체를확고히하고윤리적책임문제에대해접근할필요가있다. 현재자동차사고발생시의법적책임은수익자부담원칙에따라배분하고있다. 이는다시말하면, 자동차사용을통하여수익을얻을수있는이용자, 제작사, 공유운영자들이사고상황에서의윤리적선택에대한책임을감수해야한다는것이다. 또한윤리적책임을회피하기위한보험제도를개발하기위해서는최소위험회피원칙을고려할필요가있다. 즉, 자율주행자동차를운행함에있어발생할수있는위험요소는이용자관점, 제작사관점및공유운영자관점에따라다르며, 이들이가지고있는차량의위험정보량과이를회피하기위한비용측면을고려하여가장적은비용으로위험을회피할수있는측에서보험
42 xlii 책임을감수해야한다는것이다. 앞서설명한두가지관점의원칙을적용하기위한전제조건으로관련법령에자율주행자동차가법적으로정의되어야하며, 법적정의에있어자율주행기술수준에따른고려가필요하다. 4) 수용성쟁점의대응방향 1 자율주행기술에대한이해증진자율주행자동차의인식조사에서자율주행자동차를이용함에따라주행중다른활동을할수있을것이라는시간의효율적활용부문에서일반인운전자와비운전자모두전문가와직업운전자에비해긍정적인기대를하고있는것으로나타났다. 현재의자율주행관련법규정과기술수준이아직까지는자율주행중운전자에게전방주시의의무가있으나일반인의긍정적인인식이기술적현실을다소앞서나가고있는것으로판단된다. 최근미국에서발생한테슬라사의자율주행자동차충돌사고는운전자의오토파일럿기능에대한과신으로긴급상황대응에미흡했던사례라고할수있다. 따라서자율주행자동차상용화와보급시이용자의기대수준이실현가능한기술수준과조화될수있도록이용자의수용성개선이필요하다. 2 개인정보보호범위설정및이해증진개인의위치정보공유에대한인식에서일반인운전자, 비운전자와직업운전자의인식에비해전문가의인식이다소높은것으로분석되었다. 전문가의경우개인의위치정보가자율주행의효과성을높이는데꼭필요한정보라는것에대해인지하고있기때문에이에대한긍정적인식이높게나타난것으로판단된다. 향후개인의위치정보의공유의무화필요성증대와이에대비하기위하여일반인의인식을개선하여수용성을높일필요가있다.
43 요약 xliii 3 자율주행기술및서비스별수용성향상자율주행자동차운행시에가장우려되는사항을조사했을때자율주행시스템결함으로인한교통사고상황발생이가장높았고, 사고발생시책임소재가모호한점에대한우려가높게나타났다. 이는자율주행자동차의도입으로이용자편의가향상될것을기대하고있으나, 아직까지자율주행기술에대한우려와법제도적여건마련이미흡하다는우려가반영된것으로판단된다. 자율주행기술수준및제공서비스별이용의사에서 3 4단계자율주행자동차이용의사는높게나탔으나자율주행버스, 택시, 공유서비스의이용의사는상대적으로낮은수준으로조사되었다. 정부와지자체에서는관련기술도입을위한기술개발을위한정책을마련하여추진하고있다. 이에따라자율주행버스의도입은개인용자동차의상용화에비해빠른시일내에가시화될것으로판단되며이에대비하여일반인과운수사업자의수용성향상이필요하다. 도로공용이용과관련하여자율주행자동차가자신의주변에서운행하는것에대한인식은부정적인것으로나타났다. 설문결과에서는자율주행자동차는다른차량과구분이될수있도록하고, 전용차선을지정하여야한다는인식이높은것으로나타났다. 현재개발하고있는자율주행자동차기술의안전성평가를위한실증을위해일정기간동안전용차선을설치하여운행하는것이필요한것으로판단된다. 따라서자율주행자동차실증운행은전용차선지정운영단계부터시작하여향후일반자동차와혼용하는단계로구분하여단계별로일반인의수용성을높여야할것이다. 4 자율주행기술단계별접근자율주행자동차와관련된일반인 ( 운전자및비운전자 ) 의수용성을높이기위해단계적접근이필요하다. 자율주행자동차에부가기능으로장착되는 ADAS 수준의보조기능서비스에대한운전자수용성과완전자율주행자동차에대한운전자및비운전자의수용성은그범위와깊이가다르기때문이다. 따라서기술개발방향과기술단계별상용화시기등을고려하여관련기술에대한운전자및사회적수용성을고민할필요가있으며, 기술개발단계에서
44 xliv 관련기술의수용성정도를파악하여기술개발방향에적용함으로써상용화기술개발완료후효과적으로보급하는전략을마련할필요가있다. 이를통하여정책입안자의정책목표를달성하고기술개발에참여한기업인이규모의경제달성을위한보급속도를가속화할수있을것이다. 나. 자율주행자동차의법적책임쟁점과대응방향 1) 자율주행자동차의법적책임쟁점자율주행자동차의운행과관련된법적문제가제기되면단순한윤리문제뿐만이아닌그에대한손해배상책임혹은형사책임문제가현실적인문제로써발생될수있다. 자율주행자동차의운행에따라법적문제가발생하면관련성문법규에의한책임문제가발생하기때문에이와관련된책임귀속및집행에대한현실적인검토가필요하다. 따라서자율주행자동차와관련된법적문제의제기는담론에서현실문제로이행하는것에초점을맞춰야할것이다. 자율주행자동차의법적문제제기의시작은자율주행자동차를어떻게정의할것인가에서출발된다고할수있다. 현재자율주행자동차를대리인으로정의하는입장, 사법적제조물혹은인공지능으로보는입장이있다. 자율주행자동차를어떻게정의하는가에따라사법및형법적영역의관련법규적용을위한해석이달라지고, 결과적으로책임의소재와무게가달라질수있기때문이다. 1 대리인으로써자율주행자동차정의와책임자율주행자동차의윤리와관련된쟁점을먼저기술단계별자율주행자동차의법적정의에대한합의가이루어져야한다는것이다. 낮은기술수준의자율주행자동차인경우이용자의이동성과편의성을향상시켜주는보조적인도구의역할을한다고할수있다. 1 2 단계자율주행자동차의법적책임이이용자와제조자에게있다고하는것은윤리적책임또한이용자와제조자에게있다고볼수있다. 3 단계의자율주행자동차는스스로환경을인지하여상황판단을할수있
45 요약 xlv 다. 주행제어권을운전자에게전환할때사고를회피할수있는적절한시간차를두고전환해주는것으로아주제한적인범위에서운전자의운전역할을대리한다고할수있으며, 극단적인상황에서의윤리및법적책임은운전자에게있는것으로판단된다. 고도의자율주행자동차및완전자율주행자동차는이용자를대신하여도로를운행하는중발생하는모든상황을판단하여안전하게이용자를목적지까지수송하는역할을한다고할수있다. 이때완전자율주행자동차의소유여부에따라서법적정의가분류될수있다. 자율주행자동차가대리인으로써정의된다고할때극단적사고상황에서의윤리책임은사용자에게있다고볼수있다. 따라서자율주행자동차가대리하는주체에따른법적정의가필요하다. 2 자율주행자동차의사법상법적인격과사고책임자율주행자동차로인한사고가발생한경우, 자율주행자동차의행위주체성이부인된다면부분적자율성을가진자율주행자동차는물건으로써취급될수있다. 이러한경우책임은자율주행자동차사고의원인이어느영역에있는지에따라결정된다고할수있다. 물건자체의흠결인경우, 제조물책임법에의해제조자가책임을져야한다. 사고책임과보험문제는책임의주체에따라가입가능한보험이설정된다. 제조자가책임을지는경우, 자율주행자동차의제조자는제조 설계상결함등으로인해제3자가손해를입는경우에대비하여제조물책임보험에가입할수있다. 운용자가책임을지는경우자율주행자동차를이용하는자가그이용과관련하여타인에게손해를입혀손해배상책임을져야하는경우에대비하여책임보험에가입할수있다. 자율주행자동차에제조물책임법을적용하는것의적절성여부에대한책임법제상쟁점이있다. 현행제조물책임법의해석에앞서, 자율주행자동차의운행으로인한운행책임이전부제조자에게배분될지에대한여부는분명하지않다.
46 xlvi 자율주행자동차의사고원인이자율주행기술과장치를작동시키는소프트웨어의오작동혹은결함에기인한경우, 소프트웨어는동산이아니기때문에제조자가제조물책임을벗어날가능성이높다. 대법원이인정한것처럼원고의입증책임을완화하더라도원고가자율주행자동차사고원인이설계상결함에있다고주장하며특정한대체설계를제시하는것은어려움이있다. 2 자율주행자동차의형법상법적인격과책임현행형법상의행위에대해범죄행위능력과형사책임능력을가진자연인을전제로하며행위주체성을의미하는범죄능력과행사책임의귀속주체로써의책임능력을구별한다. 자율주행자동차가자율주행을하던중사고를야기하여가벌적범죄가발생했을경우의자율주행자동차의처벌여부는여전히미지수이다. 자율주행자동차는형법상법주체성이없다고판단할수있으며범죄능력과행사책임능력또한없다고할수있기때문에가벌에대한실효성을갖기위해서는제조자, 사용자, 소유자등인간에대한형벌이더효율적이다. 이는윤리적주체성과연결되며로봇의윤리적주체성이부정되는경우그책임은전적으로제조자, 사용자, 소유자등의인간에게귀속될것이다. 자율주행자동차를작동하게하는소프트웨어의흠결로인해사고가난경우, 운행자는차의운전자로서의주의의무를진다고볼수도있으므로형사처벌될가능성이존재한다. 또한피해자의존재를생각한다면책임이필요한데민사책임만으로도충분한가에대한문제가발생한다. 3 자율주행자동차의행정법상법적인격과책임현행도로교통법은차마를그본래의사용용법에따라사용하는것을운전의개념으로정하였으며, 운전자를중심으로면허제도 통행방법등의도로교통법체계를구성하고있다. 자율주행자동차가일반화되면현행과같은도로교통법체계를어떻게변화시킬것인지에대한근본적인연구가필요하다.
47 요약 xlvii 무면허운전 음주운전 안전규칙위반등의경우, 운전자에대한면허취소및정지 교통범칙금등의행정책임을부과한다. 이러한경우자율주행자동차가책임을지는가에대한논의가필요하다. 현행국가배상법상공무원의위법한직무행위 ( 제2조 ) 또는영조물 ( 도로 하천등의공물 ) 의하자 ( 제5조 ) 로인한손해가발생한경우, 국가의손해배상책임이인정된다. 공무수행로봇의경우, 우선적으로제 5조상의영조물로서손해배상책임이인정되며만일주체성 ( 권리능력 ) 인정여부에따라제 2조상의손해배상책임문제가제기될수있다. 2) 윤리문제와책임법제관련대응방향자율주행자동차는운행과관련하여다양한법령에적용될수있다. 자율주행자동차운행중발생한사고에대한책임의의무와보험가입과관련된사법상문제로누가책임을지고, 누가보험에들어야하는가와형사법상의처벌주체는누가될것인가에대한문제가있다. 또한, 자율주행의규제와주행환경의정비를위한운전자 도로및자동차등에관한행정법상문제가있다. 이러한문제들은사법 형법 행정법이기초하고있는기본개념들에대해근본적인검토와함께개별관련법규의개정또는제정필요성을요구하고다음의사항에대한검토가필요하다. 사법상의문제는자동차손해배상보장법 제조물책임법 보험법등의해석으로자율주행자동차운행으로인한책임과보험문제를해결할수없다면, 특별법제정을통해문제를해결해야한다. 형사법상의문제는자율주행자동차운행에대한형사책임의완화에대해검토하여야하며교통사고특례법에특별규정신설의필요성등을검토해야한다. 행정법규정비를통하여자율주행자동차의규제와자율주행환경의조성을위해관련행정법규에대한정비작업을진행하여야하며, 관련법규로는자동차관리법 도로교통법 도로법 통신보호법등이포함되어야한다. 이들법제도를검토함에있어기본전제로볼것은자율주행자동차를법적으로어떻게정의할것인가에대한합의가이루어져야한다. 예를들면, 자율
48 xlviii 주행자동차가이용자의운전행위를대리하는경우자율주행자동차의최종책임은자율주행자동차에자신의권리일부를대행한이용자에게갈것이기때문에그에따른법령검토의범위가달라질수있다. 따라서자율주행자동차가관련법령에서정의함에있어상호조화를이룰수있도록할필요가있고, 관련법령의제 개정범위와자율주행자동차의적용범위에대한면밀한검토가필요하다. 또한자율주행자동차는적용기술수준별로같은법령안에서서로다르게정의될수있으며, 정의에따른법령적용범위가달라질수있다. 이에따라자율주행자동차를관련법령에서정의함에있어자율주행자동차의기술개발, 상용화, 적용, 서비스제공단계등과같이기술개발및적용단계별로필요한법령제 개정이이루어질수있도록단계별적용전략을마련할필요가있다. 다. 자율주행자동차보험관련쟁점과대응방향 1) 자율주행자동차사고책임배분문제 1 자동차사고배상책임 : 이원적체계 ( 대인사고 / 대물사고 ) 현행법에서자동차사고는대인사고와대물사고에대해이원적배상책임체계를두고, 대인사고에대해서는조건부무과실책임, 대물사고에대해서는과실책임에따라배상책임을인정하고있다현행자동차사고에대한책임배분방식은대인사고인경우에는운행자에게조건부무과실책임을지우고, 대물사고인경우에는민법상의과실책임의무에따라책임이배분되고있다. 이에따라의무가입한보험에따라피해자에대한우선변제를통해피해자를우선보호하고있다. 2 대인사고에대한엄격책임의법리적근거 교통사고를원인으로하는손해배상책임은기본적으로민법상불법행위책
49 요약 xlix 임에해당하고, 과실책임의원칙이적용된다. 과실책임주의는사회일반의주의를촉진하고, 불법행위를예방 억제하며, 아울러과실을매개로한가해자에대한제재로서의기능도담당한다. 그러나과실책임주의만으로해소가어려운손해관련분쟁이발생하게됨에따라과실이존재한다는점이입증되지않더라도일정한경우그행위와손해발생사이에관계가있으면그것만으로손해배상책임을지우는무과실책임내지엄격책임의법리가대두되었다. 일반적인경우위험원인자동차에대한소유권및관리권한이개별적인자동차보유자에게귀속되고있으나자율주행자동차의경우자동차의보유자가사실상운행으로인한위험을관리, 통제할수있는방법이제한적이라는점에서, 보유자가위험원을관리하는자의지위에있다고볼수있을지분명하지않다. 이에따라자율주행자동차의사고책임및보험법제와관련하여현행 자동차손해배상보장법 을기반으로자율주행기능별사고위험을회피할수있도록관련법령규정을검토가필요하다. 다른한편에서는자율주행자동차운영자의자율주행자동차위험관리및통제가제한적이기때문에제조자에게책임을강하게부과할수있도록관련법령규정을검토하는방안을고민하고있다. 2) 자율주행자동차사고에대한현행책임법제적용가능성 1 자율주행중대인사고 : 자배법상 운행자책임 의적용가능성자배법은 자기를위하여자동차를운행하는자 를책임주체로정하고있다. 즉, 자동차운행에대한지배권 ( 운행지배 ) 과그운행에의한이익 ( 운행이익 ) 이자기에게귀속된다는의미이다. 자율주행자동차사고의경우자동차보유자의운행이익과운행지배가인정되는지여부가문제되며, 각자율주행기술단계와정상적인운행의경우와비정상적운행의경우를고려해야한다. 자율주행기술 L1~L4까지각단계별로운행자의운행지배가유지될수있는지를나누어살펴보아야한다. L1~L3 단계에서는자동차보유자의운행지배가인정될수있으나, L4 단계부터는자
50 l 동차보유자의단독운행지배를인정하기어렵고, 자동차보유자와자율주행자동차하드웨어제조사또는자율주행시스템제공자 ( 이하통칭하여 제작사 라함 ) 가공동의운행지배를갖는다고볼수있다. L4의완전자율주행 (Full Self-Driving Automation) 상태는운전자의개입이전혀없이자율주행이이루어진다. L4 단계의완전자율주행자동차의운전자는목적지및그에따른운행경로를선택한다는점에서일정부분운행지배를갖는다고볼수있으나, 실제운행과정은자율주행시스템이지배하고있다. 따라서자동차소유자와자동차제작사가공동의운행지배를갖는다고볼수있다. 자율주행의단계가높아질수록현행의자동차보유자에게운행자책임을부담시키기어려운측면이발생하므로, 자율주행사고시적정한책임배분을위해서는제작사를단독또는공동의책임주체로삼는새로운법제가필요하다. 2 자율주행중대물사고 : 민법상불법행위책임등적용가능성 L1, L2 단계의경우, 운전자가충분한주의를기울였음에도불구하고자동화장치의하자로사고가발생한경우에는제작사책임문제가발생할수있고, 이경우현행제조물책임법등이적용된다. L4 단계이상의완전자율주행자동차와 L3 단계의부분자율주행자동차의자율주행중사고의경우자율주행과관련된장치들의하자또는자율주행을가능하게하는인공지능시스템의하자가사고발생의원인일가능성이높고, 이에대한운전자의통제 관리가능성은극히제한적이다. 완전자율주행자동차사고의경우운전자의과실이직접적원인이되어사고가발생할가능성은매우낮다. 따라서대물사고에대하여과실책임원칙을적용하는현행법제상대물사고피해자는운전자및자동차보유자에게손해배상을청구할수있는근거가희박하고, 운전자및그자동차보유자의보험으로피해를보상받을수없다는결론에이르게된다. 자율주행장치및자율주행시스템의하자로인한자율주행사고 ( 대물사고 ) 의경우에는피해자는자율주행자동차제작사에대하여손해배상을청구하게되
51 요약 li 나, 제조물책임법및민법상요건입증이현실적으로곤란하다. 제조물책임법은제조물이그에합당한안전성을갖추지못한예외적인경우에적용하기위한법령으로자율주행사고에그대로적용하기에는적합하지않다. 또한제조물책임이성립되기위해서는 제조물 의 결함 을소비자가입증하여야하는데, 자율주행자동차또는자율주행시스템이제조물에해당하는지여부가불분명하고, 그결함의존재를입증하는것도현실적으로매우곤란하다. 3) 완전자율주행자동차의책임법제현행운행자책임중심의자동차배상책임법제는완전자율주행시대에적합하지않다. 자율주행사고의경우자배법의운행자개념의해석상운행자와제작사가공동으로운행지배를갖는다고볼수있다. 또한자동차사고시책임소재가불분명해짐에따라보험가입의무자의확정, 보험금분담등각종문제가발생할수있다. 따라서 L1~L3 단계에서는현행책임배분법제를적용하여자동차보유자가피해자에대한 1차책임을부담하고제작사에구상을청구하는 2단계책임배분구조를유지하더라도, 완전자율주행시대에는변화된환경및상황에적합한새로운책임법제를마련할필요있다. 1 피해자보호및자율주행자동차관련산업의육성자배법상운행자책임및교특법상종합보험가입면책제도는모두교통사고피해자에대한신속 적정한피해보상을그목적으로한다. 자율주행사고책임배분을검토함에있어서도피해자보호를가장우선하여고려하여야한다. 다만, 피해자보호를위해제작사에게과도한책임을부과시킬경우자율주행자동차산업의발전을저해할가능성이있다. 따라서피해자보호에충실하면서도자율주행자동차산업발전이가능한방향으로책임배분제도마련이필요하다.
52 lii 2 제작사책임과자동차보유자책임의관계및주된사고책임자확정자율주행사고의경우현행법제를적용할경우운행자가누구인지의문제가제기되고, 대물사고시자율주행사고의과실이누구에게있는지가불분명하기때문에과실책임원칙과운전자에대한사용관계에대한법령을적용하기어렵다. 따라서완전자율주행시대에는자율주행사고가발생한경우대인사고및대물사고모두에대한 1차책임자가누구인지를우선확정해야한다. 자율주행사고가발생한경우제작사가부담하는책임의법적근거및교통사고피해자에대한직접책임부담여부에대해서는아직구체적인방안이제안되지못한상태이다. 따라서손해배상책임에관한기본적인법리를해치지않으면서동시에피해자보호를약화시키지않는방향으로양자의책임을조화시킬필요가있다. 자율주행자동차보유자의자기신체사고및자차사고에대한책임법제도입도함께고려되어야한다. 자율주행사고의경우자동차보유자또는운전자자신의과실에의해발생한손해라고볼수는없고, 오히려보유자등은사고피해자에해당한다. 또한, 자율주행자동차제작사측의과실은입증이불가능하며, 제조물책임법상책임은자기신체손해에대한책임에는적용이가능하나자차사고에대해서는적용이되지않는등의문제점도있다. 3 자동차보험제도의현실적운영방안교통사고피해자에대한실질적인구제기능은자동차보험 ( 의무보험및종합보험 ) 이수행하고있다. 따라서자율주행사고에대한책임법제를마련함에있어관련보험제도운영의측면을고려하여야한다. 교통사고피해자구제와관련된대인배상및대물배상보험은그성격이책임보험의특성상법적책임의주체가보험가입의주체가된다. 따라서양자를분리해서생각할수는없고, 결국자율주행사고의법적책임을부담하는자가보험가입의무도부담하게된다. 책임법제자체는불법행위책임및손해배상에관한법리상타당하더라도,
53 요약 liii 실제그러한책임법제가보험제도와연결되어피해자에대한실질적보상으로귀 결되지못한다면그와같은책임법제는제기능을다하는것이라고볼수없다. 4 자율주행자동차관련각국법제및국제협약미국, 유럽, 일본등주요자동차생산국가들은자율주행자동차관련제도를도입 정비하고있는바, 자율주행자동차관련해외의법제도변화의흐름을주시하여국제적기준에부합하는법제도를마련할필요가있다. 자율주행자동차가상용화될경우운전자의주의의무에관한제네바협약의내용은상당부분수정내지변형될필요가있다. 미국은자율주행자동차시험운행요건지침을마련하고, 개별주가시험운행관련법규정을마련하여시행하고있다. 유럽은 Gear 2030사업을통해자율주행자동차관련제도를연구중이다. 유럽집행위원회는자율주행자동차들이야기한충돌사고에대한보장을위해보험법개정이필요한지를논의하고있다. 유럽의회법사위원회는자율주행자동차관련보고서초안을발표하였으나, 자율주행자동차제작사와보유자중누가법적인책임을부담할것인지에대해서는아직확정하지않은것으로보인다. 자율주행중사고발생시책임및관련보험제도에대한해외의법제도가형성되어가는과정을주목할필요있으나, 사고책임및관련보험제도의경우반드시유럽또는미국의경우와일치시켜야하는것은아니므로, 해외의동향을참고하여우리나라의실정에맞는제도를마련해나갈필요가있다. 2) 자율주행사고책임배분대응방향 1 제1안 : 자동차보유자가 1차책임을부담하는방안이방안은자율주행사고시자동차보유자가현행운행자책임과동일 유사한조건부무과실책임을부담하도록하는방안이다. 자동차보유자는자율주행자동차의운행여부, 운행목적지, 운행경로등을스스로설정하므로운행형태가자율주행이라하더라도여전히운행지배를갖고, 이를통해운행이익
54 liv 을얻는자이므로, 그운행으로인한사고에대해서책임을부담하는것이타당하다는논리에입각한방안이다. 자율주행사고시에는대인사고및대물사고모두자율주행자동차의보유자가 1차책임을부담하도록할필요있다. 그러나자동차보유자를 1차책임자로볼경우, 과실책임원칙및위험책임원칙과는부합하지않는측면이있다. 완전자율주행자동차의경우자동차보유자는자동차를소유하고운행명령을내리지만, 운행과정에대한통제권한은전혀가지고있지않다. 따라서자율주행자동차의보유자는자율주행자동차의안전한운행및사고방지에관여할가능성이거의없고, 따라서사고를예방할주의의무의주체가된다고볼수없어, 과실책임원칙은물론위험책임의원칙상으로도보유자에게책임을부과하는것은부당하다. 또한자율주행사고발생시항상 2단계배상절차를거쳐야하는등절차사항의비효율이발생한다. 2 제2안 : 제작사가 1차책임을부담하는방안제작사가자율주행자동차보유자에대한제조물책임을부담하는데그치지않고, 교통사고피해자에대하여 1차적이고직접적인보상책임을지는방안이다. 자율주행사고의원인이자율주행시스템의결함일가능성이높으므로, 실질적으로그와같은사고원인을통제, 관리할수있는지위에있는자가직접배상책임의주체가된다는점에서민법상불법행위책임에관한일반원칙인과실책임의원칙및위험책임의원칙에부합한다. 소비자는자율주행자동차를구매함으로써사고의위험을제작사에게이전할수있어자율주행자동차에대한선호도가높아져산업발전에도긍정적인영향을미칠수있다. 제작사는자율주행자동차판매대금외에도자율주행시스템업데이트또는자율주행장치정기점검등에비용을부과함으로써위자율주행사고시배상및관련보험가입을위한재원을마련할수있다. 또한, 자율주행자동차사고관련책임을제작사에게집중시킬경우에는관련보험등을통해서도제작사가배상책임을다이행하지못할경우국가, 또
55 요약 lv 는관련기금에서이를보상하도록하는방안이함께마련되어야한다. 3 제3안 : 소유자와제작사가공동책임을부담하는방안자동차보유자는자율주행의경우에도운행이익과운행지배를갖는다는점, 제작사역시자율주행장치및자율주행시스템의설계, 제작, 공급및관리등의전단계에서자동차사고에직 간접적인원인을제공할뿐아니라실질적으로자율주행사고를통제하고관리할수있는유일한지위에있는자인점을고려한다면, 양자모두자율주행사고에대하여책임을부담하는것이타당하다. 자율주행사고시에는자동차보유자및제작사가모두책임의주체가되도록함으로써자율주행사고피해자는자동차보유자및제작사에손해배상책임을물을수있도록하는방안을도입할수있다. 이경우, 과실책임및위험책임의조화를도모할수있고, 피해자보호도더욱강화되는장점이있다. 소유자와제작사는공동불법행위의경우와같이일단피해자로부터청구를받은자가전액배상책임을부담하고, 추후내부관계에서손실을배분할수있다. 그러나이경우보험제도운용상의문제가발생할수있다. 교통사고피해자에대한실질적구제및보상은보험을통해서이루어지는바, 자배법상책임주체가단일화되지않고공동책임형식을취하게되면피해자에게혼란을초래할수있고, 이와관련된의무보험및책임보험도이중으로운영이되어야하므로보험제도운영상문제점이발생할수있다. 이에따라제작사의구상의무의존부는자동차사고원인과직접관련이있으므로, 사고원인에대한조사등의과정에제작사및제작사측보험회사가참여하도록하는것이구체적타당성및향후사고예방등의측면에서더욱타당할수있다.
56 lvi 6. 결론 본연구에서는자율주행자동차의윤리알고리즘에대한문제제기를하고윤리문제에있어사회적합의가이루어질수있는가에대해실험을통해고찰하였다. 실험에서는윤리문제에대한일반적이고공통적인의견이형성되는것으로나타났다. 이를통하여자율주행자동차윤리문제의사회적합의를이루기위한다양한정책설명과이해를돕는홍보활동이필요한것으로판단된다. 자율주행자동차개별기술과단계별기술에서많은응답자들이의사를결정하지못하고있는패턴을보였다. 따라서향후자율주행자동차상용화에수반된자율주행자동차보급정책추진에앞서자율주행자동차수용성향상을위한정책을추진할필요가있다. 영업용자동차운전자는일반인에비해자율주행자동차에대한부정적인의견이다소높은것으로나타났다. 향후자율주행택시서비스의등장에따라택시운전자들과의충돌이발생하지않도록갈등관리에대한논의가이루어져야할것이다. 공유자율주행자동차교통법규위반시책임소재에대한질문에서일반인의경우탑승자보다는자율주행자동차소유자, 제작사에책임이있다고응답하였다. 이러한의견은아직까지자율주행자동차의사고시법적책임에대한합의가이루어지지않은상태인것으로판단된다. 이에따라향후자율주행자동차의법적책임에대한연구와논의를통한사회적합의를도출할필요가있다. 수용성설문조사에따르면, 조사대상응답자들은자율주행자동차사고책임회피를위한보험제도개선방안에대하여어느한쪽의의견을선호하지않고있는것으로파악된다. 따라서지속적인연구와논의를통해구체화할필요가있다. 자율주행자동차와관련된법제도개선을위해국토교통부, 경찰정, 행정자치부등과관련된법령의검토가필요하며, 제도개선을원활히추진하기위한특별법의제정을검토할필요가있다. 자율주행자동차윤리알고리즘개발과
57 요약 lvii 관련하여윤리적판단과관련된윤리강령 ( 가이드라인 ) 마련이필요하다. 또한, 국내외사회적합의를도출하기위하여위한오픈플렛폼 (Social Acceptance Open Platform) 구성을통해국제적인논의를선도할필요가있고, 자동차안전기준및관련표준제정활동의선도를통해국가경쟁력을확보할필요가있다.
58
59 1 제 1 장서론 제 1 절연구의배경과목적 1. 연구의배경및필요성 자율주행자동차의기술개발이급속히이루어지고자동차시장의선점경쟁이치열해짐에따라우리나라정부는자율주행자동차개발계획을수립하여연구개발사업에착수하였다. 미래창조과학부는 2015년제1차관주재로제1 차 무인이동체발전협의회 를개최하여자율주행자동차등미래신시장을대비한추진계획을수립하였고, 2015년 5월무인이동체분야의미래신시장창출과산업경쟁력강화를위해관계부처합동으로 무인이동체기술개발및산업성장전략 을국가과학기술자문회의에보고하였다. 이에따라우리나라가자동차기술과정보통신기술을접목하여자율주행자동차시장을선점할수있도록범정부차원의지원체계를마련하고, 자율주행지원도로인프라구축과 ICT 기반자율주행을위한핵심부품, 서비스등원천기술개발을활발히추진중이다. 우리정부는자율주행자동차시장의선점을위해 2020년까지자율주행자동차의상용화를목표로지원체계를구축하여시행 1) 하고있다. 자율주행자동 1) 국토교통부보도자료, , 자율주행차상용화지원방안, 제 3 차규제개혁장관회의
60 2 차기술과관련된정부부처는미래창조과학부, 산업통상부그리고국토교통부의 3개부처로, 각부처는고유의업무영역에서자율주행자동차상용화를위한기술개발지원을추진하고있다. 미래창조과학부에서는소프트웨어및플랫폼, 통신및보안핵심기술개발과관련기술의연계서비스를실증하는사업을지원하고있다. 전통적으로자동차및자동차부품의개발을지원하고있는산업통산자원부에서는자율주행을위한핵심부품및전기전자플랫폼과제어기술개발을지원하고있다. 자동차의운행편의와안전을도모하고, 도로와도로교통의운용, 국토의효율적활용및공간정보등의구축을담당하고있는국토교통부는자율주행을지원하기위한도로인프라및교통운영체계구축과관련기술개발지원, 그리고자율주행자동차도로운행을지원하기위한규제개선에주력한다는추진전략을구축하였다. 자율주행자동차상용화를위한추진전략에는자율주행시험운행에대한허가요건및시험도로구간지정, 전자지도제작및차량통신주파수분배등을통한관련인프라확충, 해킹예방기술및운행시범서비스등이포함되어있다. 지금까지의자율주행자동차정책은산업적측면에서미래자동차시장을선점하고국가경쟁력을확보하고자하는정부의의지로추진되고있는입장이라고할수있다. 그러나향후 2020년자율주행자동차의상용화추진단계에도달한시점에서자율주행자동차보급을원활히추진하기위해서는, 자율주행자동차를이용하게될운전자와자율주행자동차및공공서비스 ( 도로및통신인프라등 ) 를공유하게될일반시민에대한수용성과운전자의운행행태에대한연구가이루어져야한다. 자율주행자동차는특별한경우를제외하고인간의인지반응과정과절차를자율주행시스템이대체하면서자동차운행중운전자가수행했던의사결정을자율주행시스템이하게된다. 즉, 운전자의수동운전과자율주행차량의로봇운전이규합되는상태이다.
61 제 1 장서론 3 현재, 다양한측면의자율주행자동차기술개발이진행중이지만새로운기술을받아들이는운전자의수용성, 즉자율주행자동차를이용할때운전자행태변화에대한고려가부족하고관련기술개발이미흡한상태이다. 자율주행자동차구입과운행에대한견해, 자동차운행에있어인간운전모드에서자율주행자동차의자동시스템운전모드로전환될때의운전책임과각각의역할, 자율주행자동차의도입에따른운전요구기능등에대한연구가필요하다. 또한, 자율주행모드운행상황에서갑작스런교통사고등돌발상황발생시자율주행자동차의선택에따른책임소재, 충돌을회피할수없는상황에 어느누구를최우선으로보호해야하는가? 와같은윤리선택의문제를해결해야한다. 이는로봇기능을가진자율주행자동차가사고시인간과같은법적책임의주체가될수있는지, 또한자율주행자동차를움직이는인공지능 (AI) 이 No-Win 상황하에서도특정선택을하도록프로그래밍되어있어야하는지와같이단순공학, 과학적기술로해결하기어려운문제로서, 로봇윤리에대한철학적, 심리적그리고사회학적접근이필요하다고판단된다. 2. 연구의목적 본연구의목적은크게두가지로자율주행자동차와관련된윤리와운행책임의개념을정리하고대응기술과정책방안을마련하는것과자율주행자동차기술에대한운전자수용성분석및개선방안을도출하는것이다. 자율주행자동차윤리개념을정립하고, 운전행태와윤리문제관계의분석을통한자율주행운전책임을규명하며, 관련대응기술과정책방안을마련하고자한다. 이를위하여자율주행기술수준에따른운전책임의변화와관련된쟁점의분석, 자율주행자동차관련윤리개념과운전책임에대한개념정립, 자율주행자동차의인적요소대응기술개발내용과과제를도출하고자한다.
62 4 또한, 자율주행자동차기술개발및적용에따른운전자수용성분석과개 선방안을도출하기위해자율주행자동차의도입에따른쟁점및문제를분석 하고, 운전자수용성개선방향및개선방안을제시하고자한다. 제 2 절연구의범위및방법 1. 연구의범위 본연구의범위는자율주행자동차의기술개발과정책현황분석, 자율주행자동차의윤리개념정립, 자율주행자동차의윤리와운전자수용성조사분석등으로크게구분할수있다. 자율주행자동차의기술개발과정책현황분석은자율주행자동차의개념, 기술수준, 서비스분석, 기술발전전망, 상용화시기, 기술개발방향전망, 부처별정책지원, 현안및쟁점등을분석한다. 자율주행자동차의윤리기초연구에서는자율주행관련윤리개념을정립하고, 윤리문제발생이유와원인분석, 대표적윤리문제정의및쟁점등의분석을포함한다. 자율주행자동차의수용성기초조사와분석결과를토대로, 자율주행자동차의윤리와법적책임, 보험등의분야에대한대응방향을모색해보고자한다. 2. 연구의방법및절차 자율주행자동차는일반차량과달리다양한센서와판단제어기술에의해결정된경로와차로등에따라운행되므로운전자의수용성과도로수용성이검토되어야한다. 또한, 차량자체에프로그램화된자율주행의의사결정이윤리적으로합당하고사회적으로수용되어야하며, 사고발생시피해가최소화되도록설계가되어야한다. 차량이자율주행모드로운행될때차량의거동이일반운전자와달라지고, 자동모드와운전자모드의전환시운전조작에어려

63 제 1 장서론 5 움이없어야하므로운전자행태에대한연구도수행되어야한다. < 그림 1-1> 연구추진체계 본연구의구성은제2장에서자율주행자동차의기술개념을정의하고, 자율주행자동차기술개발및정책현황을살펴보고자한다. 다음으로인간운전자와자율주행자동차즉, 시스템운전자간의특성을비교하여자율주행자동차기술단계별윤리문제와의관계를조명해보고자한다. 제3장에서는자율주행자동차의윤리에대해정의하고, 자율주행자동차의윤리적기준을논의하는철학적도구와자율주행자동차사고발생에따른법적책임과이를회피하기위한보험제도에대해논의하고자한다. 제4장에서는자율주행자동차가운행중직면하게될윤리적딜레마사례를정리하고, 이에대응하는알고리즘을개발하기위해사전단계에서사회적합의의필요성을논하고자한다. 특히개인이가지고있는윤리적판단이사회적으로합의될수있는일반화된합일점의존재여부와, 개인의의견이사회적으
64 6 로바람직한방향으로바뀔수있는가를윤리행태실험을통해검증해보고자한다. 또한자율주행자동차에대한일반인과전문가를대상으로수용성조사를실시하고향후정책방향의시사점을도출하고자한다. 제 5장에서는앞서도출된시사점을바탕으로자율주행자동차개발추진에있어제기될수있는윤리문제, 사고발생시법적제도적 ( 보험 ) 책임문제에대응하기위한정책방향을논의하고, 제6장에서는이를위한정책제언으로마무리하고자한다. 각국에서자율주행자동차개발을적극적으로추진하고있는것은 1차적으로자율주행자동차를통해교통안전, 운전자편의, 교통및투자효율성확보, 환경저해요소저감을실현하고자하는것이다. 자율주행자동차개발을통해실현할수있는사회적편익을실현하기위한윤리문제, 법적책임문제, 그리고수용성확보방안은절대적으로필요한것이라고할수있다. 본연구의추진방법은첫째, 문헌조사를통해현재개발되고있는자율주행자동차의기술을고찰하는것이고, 둘째, 윤리실험과수용성조사를통해자율주행자동차운행과관련된윤리문제인식을행동실험을통한고찰과일반인과전문가를대상으로한수용성조사분석을실시하고, 셋째, 자율주행자동차의수용성향상을위한대응방향을모색하는것이다. 제 3 절선행연구고찰및본연구의차별성 최근정부의자율주행자동차상용화를위한지원에따라다양한연구개발이진행되고있다. 자율주행자동차및도로교통분야에서현재활발히추진되고있는연구개발은자율주행자동차와도로인프라의협력주행을위한시스템개발사업과자율주행자동차안전성평가기술개발과이를위한테스트베드구축연구개발사업이대표적이다. 최인구외는스마트자율협력주행시스템개발 ( 국토교통부, ) 에서자율주행자동차의운행을위한정보수집, 도로인프라구축, 차량위치정보,
65 제 1 장서론 7 디지털인프라기술개발과자율협력주행도로시스템개발로드맵구축과운영전략및방법, 법제도정비, 효과분석기술개발을주요골자로하고있다. 홍윤석외의자율주행자동차안전성평가기술개발및실도로평가환경구축 ( 국토교통부, ) 연구는자율주행자동차의안전성을평가하기위한자동차주행안전성, 사고대응안전성, 통신안전성및인적요인에관한평가기술을개발하고, 실차시험을위한자율주행자동차평가및기술개발전용의테스트베드와이를운영하기위한도로운영시나리오를개발하는것이다. Dimitris Milaks 외는네덜란드자율주행자동차개발시나리오와시사점 (2015) 에서는네덜란드의미래자율주행자동차에대한설득력있는개발방향을살펴보고, 향후 년기간에있어교통량, 통행행태및교통계획에미치는시사점을시나리오분석을통해평가하였다. 본연구를통해 16 가지의요인과 5가지의추진력 ( 정책, 기술, 소비자태도, 경제, 환경 ) 을바탕으로 4가지시나리오 (AV 준비, AV 호황, AV 수요, AV 불확실 ) 를개발하여전문가인터뷰, 설문, 토론을진행하였다. Prateek Bansal 외의새로운자동차기술에대한대중의의견과관심에대한평가 (2015) 는자율주행자동차기술에대한이용자수용성을연구하기위해다양한가격시나리오에따른 CAV(Connected Automated Vehicle) 기술의적용및토지이용의변화를예측하고자하였다. 본연구는정열프로빗모델 (Ordered Probit Model) 을활용하여분석하였고, Quantum GIS 를활용하여미국텍사스주오스틴 TAS와연동한 DB에서추출한 347명을대상으로설문조사하였다. CAV 적용비용과시기분석에서수입이높은최신기술에능통한남성으로도시지역에거주하며자동차사고경험이많은응답자일수록이들새로운기술에대한관심과지불의사가격이높은것으로나타났으며, 이들은동료의의견에대한의존율이낮은것으로나타났다. Nikhil Menon 외의자율주행자동차기술에대한이용자의인식과수용의사 (2015) 는자율주행자동차에대한인식과기술수용의사에미치는요인을측정하고자하였다. 본연구는 USF( 남부플로리다대학 ) 학생, 교수및관리직원
66 8 800명을대상으로자율주행차에대한인식과, 자율주행자동차도입에따라예상되는영향을설문조사하여분석하였다. AV에대한 친숙도변수 를포함하여분석하였으며, 인구특성에따른 AV의편익과우려에관한인식의차이가 AV 수용성차이에영향을미치는것으로나타났다. 또한 AV 기술정보, AV 차량의안전성향상측면에대한노출의정도가높을수록 AV에대한두려움과편견이적은것으로나타났다. 소비자수용성을향상시키기위한전략으로 AV 시험운행기회를제공하고, 다양한 AV 특성에대한표준화된시험절차를도입하며, 개인정보의사용과관련된좀더엄격한취급기준을제공함으로써자율주행자동차에대한소비자인식을향상시키는데도움이될것으로제언하였다. 본연구는자율주행자동차기술개발및적용에따른사회적수용성분석과대응방안을도출하고, 자율주행자동차운전행태및윤리문제분석을통한자율주행운전책임규명및대응기술개발방향을모색하는것이다. 또한자율주행자동차윤리인식의행태변화에대한실험조사와더불어운전자수용성조사분석을수행하는점에서차이가있으며, 자율주행자동차의도로인프라혼용으로인해발생하게될도로수용성분석을위한기초연구를제시하고자한다. < 표 1-1> 본연구와선행연구와의차별성 구분 선행연구와의차별성 연구목적연구방법주요연구내용 주요 선행연구 1 과제명 : 스마트자율협력주행도로시스템기술개발 ( 국토부, ) 연구목적 : 자율주행자동차와도로의협력체계를통한자율주행기술구현을위한기술개발 스마트자율협력주행도로시스템개발을위해 4 개분야, 즉도로인프라개선기술, 도로운영기술, 자율주행자동차성능개선기술, 테스트베드구축및평가기술로구분하여국가연구개발사업으로추진중 산학연으로구성된연구단에서각각의기술개발 자율주행자동차의운행을위한정보수집, 도로인프라구축, 차량위치정보, 디지털인프라등기술개발 자율주행자동차로드맵구축, 운영전략및방법, 법제도정비, 효과분석기술개발 자율주행자동차의성능향상기술, 도로와의정보교류기술개발 테스트베드구축및평가방법
67 제 1 장서론 9 구분 선행연구와의차별성 연구목적연구방법주요연구내용 과제명 : 자율주행자동차안전성평가기술개발및실도로평가환경구축연구 ( 국토부, ) 연구목적 : 자율주행자동차의안전성을평가할수있는방법과기술, 실도로평가를위한테스트베드구축및유형별도로운영시나리오도출 과제명 : 네덜란드자율주행차량개발시나리오와시사점 (2015) 연구목적 : 네덜란드의미래자율주행자동차에대한설득력있는개발방향을살펴보고, 년의교통량, 통행행태및교통계획에미치는시사점을시나리오분석을통해평가 과제명 : 새로운자동차기술에대한대중의의견과관심에대한평가 (2015) 연구목적 : 자율주행자동차기술에대한이용자수용성을연구하기위해다양한가격시나리오에따른 CAV 기술의적용및토지이용의변화예측 자율주행자동차기술에대한이용자의인식과수용의사 (2015) 연구목적 : 자율주행자동차에대한인식과기술수용의사에미치는요인을측정 자율주행자동차의안전성평가항목과방법제시 실도로평가환경구축을위한도로와시스템의유형화 도로유형별도로운영시나리오개발 시나리오개발은다섯단계로이루어졌으며, 16 가지의요인과 5 가지의추진력 ( 정책, 기술, 소비자태도, 경제, 환경 ) 을바탕으로 4 가지시나리오 (AV 준비, AV 호황, AV 수요, AV 불확실 ) 개발하여전문가인터뷰, 설문, 토론진행 정열프로빗모델을활용하여분석하고, Quantum GIS 를활용하여미국텍사스주오스틴 TAS 와연동하여추출한 347 명을대상으로설문조사함 USF( 남부플로리다대학 ) 학생, 교수및관리직원 800 명을대상으로자율주행자동차에대한인식과, 자율주행자동차에예상되는영향을설문 자율주행자동차의안전성평가관련주행안전성, 고장안전성, 통신안전성평가기술개발하고, 실도로평가환경을구축하고도시부도로, 고속주행도로, 교외도로및커뮤니티도로의운영시나리오개발 시나리오실현가능성 (1-100%) 에대한전문가평가는수요와호황시나리오가준비및불확실시나리오보다높고, 교통에미치는영향은호황 (1-5 점 ) 시나리오 (4.6) 가가장높고, 불확실시나리오가가장낮게나타남 (1.1) 완전자율주행자동차의실현은 년에이루어질것으로예측하였고, 보급확산은시나리오별로 2030 년 1-11%( 부분자율 ), 2050 년 7-61%( 완전자율 ) 로예측 80% 이상이 Level4 자율주행차의구매에관심이있고, 평균 WTP 는 7,253 달러 80% 이상이 CVA 서비스비용을현재차량공유서비스비용보다높게지불할용의없음 CAV 적용비용과시기분석에서수입이높은최신기술에능통한남성으로도시지역에거주하며자동차사고경험이많은응답자일수록이들새로운기술에대한관심과 WTP 가높은것으로나타났으며, 이들은동료의의견에대한의존율이낮은것으로나타남 AV 에대한 친숙도변수 를포함하여분석하였으며, 인구특성에따른 AV 의편익과우려에대한인식의차이가 AV 수용성차이에영향을미침 AV 기술정보, AV 차량의안전성향상측면에대한노출의정도가높을수록 AV 에대한두려움과편견적음 소비자수용성을향상시키기위한전략으로 AV 시험운행제공, 표준
68 10 구분 선행연구와의차별성 연구목적연구방법주요연구내용 화된 AV 시험절차도입, 개인정보의엄격한취급기준제공을통해자율차에대한소비자인식제고제언 본연구 자율주행자동차기술개발및적용에따른사회적수용성분석및대응방안도출 자율주행자동차윤리쟁점과문제분석을통한자율주행운전책임규명및대응방향모색 자율주행자동차의정의및기술개발현황문헌고찰 사회적수용성과이용자의수용성관련설문조사 문제점도출및개선방안도출을위한전문가의견수렴 윤리문제에대한핵심쟁점도출을위한시나리오구성및이용자실험조사수행 쟁점및개선방향도출을위한세미나개최및자율주행자동차수용성향상을위한대응방향제시 자율주행자동차기술개발및정책현황분석 자율주행자동차기술과윤리와의관계 자율주행자동차의윤리개념과윤리적딜레마설명 자율주행자동차윤리실험조사및수용성설문조사분석 자율주행차량운행에따른운전자수용성쟁점과시사점도출 자율주행자동차윤리, 법, 보험등대응방향제시등
 하다.")
 로정의하는경향이강하다.")
69 11 제 2 장자율주행자동차기술개발및현황분석 제 1 절자율주행자동차정의 1. 자율주행자동차의개념정의 자율주행자동차는자동차가스스로주행환경을인지하여위험을판단하고주행경로를제어하면서운전자의주행조작을최소화하며차량스스로운전하는자동차를의미 2) 하다. 자율주행차는통신장비없이차량에장착된인지센서만을활용하여주행하는 Autonomous Vehicle 과외부와통신을유지하며주행하는 Automated Vehicle 로구분할수있다. Automated Vehicle 은주행중외부통신과항상연결되어있어야하기때문에최근자율주행자동차를 CAV (Connected Automated Vehicle: CAV) 로정의하는경향이강하다. 자료 : 유시복 (2015.7) Smart Safety 및자율주행자동차기술및국제표준현황 LG 교육자료에서재인용 < 그림 2-1> 자율주행차의정의 2) 이재관 (2013), 자율주행차개발동향과주요현안, p.6
, Global Auto News(2014), 언멘드솔류션홈페이지참조하여작성 < 그림 2-2> 자율주행을위한기술개념 2.")
70 12 현재의자율주행자동차기술수준은센서기능만으로는온전히주변상황을인지하고돌발상황에대처하며주행하기어려운것으로판단된다. 이에따라자율주행을위해 V2X 통신을통해주변도로상황정보를습득하고, 정밀지도와측위정보의도움을받아주행경로와차로를선택하며, 차량외부에부착된다양한센서를이용하여근거리상황을판단하여자율주행시스템운행기능을수행한다. 이렇게도로인프라와연계하여자율주행을위한협력이필요하다. 이때문에현재자율주행자동차는 CAV로정의한다고볼수있다. 자료 : 최정단 (2016), Global Auto News(2014), 언멘드솔류션홈페이지참조하여작성 < 그림 2-2> 자율주행을위한기술개념 2. 자율주행을위한요소기술 자율주행자동차의기술은자율주행기능을구현하기위하여주행중주변환경을인지하는기술로센서, 정밀지도및측위, V2X 통신기술이필요하며, 인지된환경정보와운행정보의퓨전을통해주행제어를선택하기위한판단기술과판단기에서결정된명령을전달받아직접차를제어하는엑츄에이터기술로구분된다. 일반적인자율주행은인지 ( 도로, 교통상황등 ), 판단 ( 상황대처 ), 제어 ( 차량제동 ) 등의일련의과정을거쳐수행하게된다. 따라서보다정확하고빠르게
71 제 2 장자율주행자동차기술개발및현황분석 13 주변상황을인지할수있어야하고, 이를위해센서와함께 V2X, 정밀지도 등을종합적으로활용하고있다. 출처 : 현대자동차공식블로그 <blog. hyundai.com> 접속 < 그림 2-3> 자율주행프로세스 가. 인지 인지는운전중도로와교통상황을인식하여사물의존재와형체, 위치를확인하는자각 (Perception), 식별 (Identification), 감정 (Emotion), 의지 (Volition) 등의일련의과정을지칭하며, 인지반응시간은교통설계와운영의핵심요소라고할수있다. 예를들면, 국내의경우도로설계기준 (2012) 에서일반차량의반응시간을상황판단시간 (1.5초) 과작동시간 (1.0초) 의합인 2.5초로규정하고있다. 미국과유럽의국가표준기관 (National Standards Organization) 에서는운전자의인지반응시간을각각 2.5초와 2.0초로규정하고있다.
72 14 지금까지도로설계시에적용되는반응시간은운전자의자동차주행시인지반응시간이다. 그러나자율주행시스템의반응시간을적용하게될경우이와는다른기준이적용될필요가있으며, 향후자율주행단계별상용화및보급예측을고려하고, 도로이용분포를고려한도로설계기준개선로드맵구축을위한고민이필요하다. 1) 센서기술주행환경을인지하기위한시스템으로는카메라, 레이더, 라이다, 초음파등의다양한센서가존재하고, 실시간으로정확히데이터를처리할필요가있다. 각자율주행기술별로적용할수있는센서기술을정리하면 < 표 2-1> 과같다. < 표 2-1> 각센서별기술활용비교 구분 카메라 레이더 라이다 초음파 전방충돌방지 차선이탈방지 사각지역탐지 차간거리조절 주차지원 카메라는영상을통해도로의차선, 속도제한표지, 기타교통표지및신호정보등의도로주행환경의정보를인식하는기능을하고있다. 자율주행자동차기능구현에있어가장기본적인센서라 3) 고할수있다. 레이더 (Radio Detecting And Ranging: Radar) 는전파를이용하여물체의속도, 거리및각도를측정하는센서시스템이다. 레이더는카메라에비해전산처리가단순하고라이다에비해저장되는데이터용량이작다. 레이더는라이더에비해화각의정확도가떨어지나모든기후조건에서사용할수있고, 반향을이용하여장애물뒤쪽까지인지 4) 할수있다. 레이더의인식거리는근 3) 모세준외 (2015), 자율주행차의핵심기술및업체전략, 한국자동차산업연구소, p.13
 이있다. 이에따라최근의라이다개발동향은상용차에적용할수있을정도로가격을낮추는것이라고할수있다.")
73 제 2 장자율주행자동차기술개발및현황분석 15 거리 60-80m의사물을화각 40-60도범위에서인지할수있고, 중거리인경우150m, 장거리인경우 250m 전방의사물을화각 도범위에서인식이가능 5) 하다. 라이다 (Short for Light Detection and Ranging: Lidar) 는레이저를이용하여장거리를측정할수있는기술이다. 차량주변 100미터이내의환경을모든각도에서인지하여 3차원정밀지도를구축할수있다. 이렇게생성된정밀지도는차량의다음거동을결정하는데중요한정보로제공된다. 그러나많은양의데이터를축적하며, 중량이무겁고, 가격이비싸기때문에상용으로사용하기에는어려운단점 6) 이있다. 이에따라최근의라이다개발동향은상용차에적용할수있을정도로가격을낮추는것이라고할수있다. 벨로다인 (Velodyne) 사에서는 600gm 의중량으로 200m 전방을감지할수있으며, 가격이 500달러수준인라이더를개발하는것을목표 7) 로하고있다. 자료 : 한주엽 ( ), 자율주행차 ADAS 핵심센서칩유럽 일본 미국장악.. 국산화요구높아져, 전자신문보도자료 < 그림 2-4> 각센서별기술활용 4) Davide Santo( ), Autonomous Cars Pick: Camera, Radar, Lidar?, EETimes 5) Digi.Key, Radar Sensing for Dirverless Vehicles ( techzone/2016/nov/radar-sensing-for-driverless-vehicles) 접속 6) Davide Santo( ), Autonomous Cars Pick: Camera, Radar, Lidar?, EETimes 7) Evan Ackerman( ), Cheap Lidar: The Key to Making Self-Driving Cars Affordable


 차선및장애물 2D 인식 차선인식가능 장애물거리측정 외부환경간격거리측정시정확도높음 장애물 3D 인식거리측정")
 응용분야 LDWS, FCWS, HBA PD, TSR ACC(SCC) Stop &")
, Stop&Go, AEB 자료 : 모세준외 (2015), 자율주행차핵심기술및업체전략 한국자동차산업연구소")
74 16 초음파는차량의후방감시, 주차등을위해사용되고, 가격은다른인지센서에비해저렴하다. 보통 15m 이내의사물을인식할수있다. 최근에는카메라, 단 / 장거리레이더, 라이다등의센서를통합하고성능을보완하는기술개발이이루어지고있는추세이다. 예를들어델파이는 RACam 을개발하여볼보에공급 8) 하고있는데, 이기술은카메라와레이더를통합한것이다. 또한, 카메라는 3차원인지및기능다양화, 레이더는단거리와장거리의기능통합, 라이다는저가및소형화로기술발전이이루어지고있다. < 표 2-2> 각센서별기능 구분비전레이더라이다 감지범위 주요기능 장점 2 차원평면 (X,Y) 2 차원평면 (X, Y) 3 차원공간 (X,Y,Z) 차선및장애물 2D 인식 차선인식가능 장애물거리측정 외부환경간격거리측정시정확도높음 장애물 3D 인식거리측정 환경간격, 거리측정정확도높음, 장애물 ( 보행자포함 ) 인식 단점 외부환경에취약거리측정오차큼 보행자인식불가장애물형상인식불가 국방 / 우주항공분야양산중 ( 차량용양산사례없음 ) 응용분야 LDWS, FCWS, HBA PD, TSR ACC(SCC) Stop & Go, AEB LDWS. FCWS., PD ACC(SCC), Stop&Go, AEB 자료 : 모세준외 (2015), 자율주행차핵심기술및업체전략 한국자동차산업연구소 8) SAE International ( ), Delphi s RACam integrated radar-vision system enables active-safety suites
75 제 2 장자율주행자동차기술개발및현황분석 17 2) 정밀지도 9) 자율주행을위한공간정보는 50cm 이하의정확도가확보되어야한다. 그러나이를확보하기위한지역별데이터수집에많은비용과시간이요구되므로, 정밀지도의구축측면에서는높은정확도의지역별데이터를축적하는것이현재의중요한이슈이다. 정밀지도를구축하기위해서는 MMS (Mobile Mapping System) 장비등을활용하여도로형상및종별을고려한현장조사를실시하고있다. 그러나장비제조사별소프트웨어 (INS, GPS, Lidar 등 ) 가상이하기때문에촬영된원시데이터를활용가능하도록가공하는후처리과정이필요하며, 후처리된데이터로객체추출후컨텐츠를추출하고있다. 그러나현재의기술수준은컨텐츠를추출하는과정까지가자동화및표준화가이루어지지않았기때문에아직까지인간이수동으로가공을하고있어컨텐츠를추출하는데상당한시간과비용이발행하는것으로판단된다. 이렇게추출된컨텐츠를활용하여자동차제조업체및네비게이션소프트웨어업체에서는데이터를일반화하고계산로직을적용시킨후최종활용포맷으로변환하고있다. 정밀지도는네비게이션지도에비해데이터용량이매우크기때문에저장, 활용, 업데이트등에어려움이있다. 기본적인지도는차량에내장되어야하므로대용량데이터를압축하고, 지도의변경사항을실시간으로차량에전달하기위해데이터센터에서지도를효율적으로분할저장및전송하는기술필요하다. 또한, 지도정보와차량에장착된센서및인프라로부터받은정보를융합하여맵매칭하는알고리즘, 시스템, 소프트웨어등개발필요하다. 정밀지도를제작하고있는주요업체는 Google, Here, 탐탐, 등이며우리나라도현대엠엔소프트가자체정밀지도를제작중인것으로파악되고있다. Google 은자율주행자동차를직접제작하고 3D 인지가가능한라이다센서를 9) 모세준외 (2015), 자율주행차핵심기술및업체전략, 한국자동차산업연구소, p.20 를정리함
76 18 활용해차선구분이가능한고정밀지도를제작하고검증하고있다. 또한, 최근독일자동차 3사 ( 다임러, 아우디, BMW) 가공동으로지도제작업체인 HERE 를인수해유럽, 미국등지에서정밀지도를제작중이다. 탐탐은유럽의지도제작업체로보쉬의자율주행자동차운행을위해고정밀지도를제작하고있다. 일본에서는정부와산업이협력하여정밀지도구축을위한협의회를설치하여진행중에있다. 3) 위치측위기술 10) 위치측위기술은 GPS를사용하거나무선네트워크의기지국위치를활용하여서비스요청단말기의정확한위치를파악하는기술, 네트워크방식과단말기방식, 그리고이들을혼합한하이브리드방식으로분류된다. 대표적측위기술은 GPS(Global Positioning System), DR(Dead Reckoning), DGPS (Differential GPS), CDGPS(Carrier phase differential DGPS), 복합측위기술등으로구분할수있다. GPS는미국에서개발하여널리이용되는위성항법시스템으로위성에서발신하는전파를이용해위치를계산하는방식으로작동된다. 그러나이기술은위성궤도오차, 대기권전파방해등으로인해정밀도가떨어질수있다. 현재의기술수준에서는 10m 이상의거리오차가발생하여자율주행자동차에적용하기에는아직까지어려움이큰것으로보인다. 러시아는 GLONASS, 유럽은 Galileo, 일본은 JRANS 와 QZSS, 중국은 BeiDou 위성항법시스템을개발하여이용하고있다. DGPS는 GPS가위성으로부터받은정보와지상의기지국으로부터받은위치정보를활용, 인식정밀도를 1-5m까지높일수있는기술이나, DGPS 의수신기부품이고가이고데이터사용량이늘어나는단점과터널등에서차량의위치를잡을수없는한계가있다. 우리나라는미국에서운영하고있는 DGPS 를 18개소를설치하여운용중이다. 10) 모세준외 (2015), 자율주행차핵심기술및업체전략, 한국자동차산업연구소, p.33 를정리함
77 제 2 장자율주행자동차기술개발및현황분석 19 CDGPS 는 2개이상의위성수신기에서수집된위성반송파를활용해오차를센티미터또는서브-센티미터의정확도로제공할수있는측위기술로측지 측량분야에서활용되고있다. 이러한 GPS 기술을보완하기위해, GPS 가부정확한지역에서차량의가속도, 각속도센서를 (DR 및비젼센서 ) 이용하여차량의기존위치, 속도, 진행방향등을기반으로현재의위치를추정하는방법들이고안되고있는추세이다. 이에따라자율주행자동차시스템에서는차량내센서를이용한 DR(Dead Reckoning) 기술을복합적으로이용하고있다. 4) V2X 통신기술 V2X 통신기술은외부의다른차량및도로인프라등과의통신을통해차량센서로감지할수없는다른차량의정보 (V2V), 전방도로의돌발상황정보 (V2I) 등을제공할수있는기술이다. 그러나 V2X 기술은개발비용과인프라구축의비용이높고, 모든차량에동일한통신방식을적용해야하기때문에완성차업체로구성된연합체에정부가참여해개발하고있다. 예를들면, 미국의 CAMP( 다임러, 도요타, GM, 현대등참여 ), 유럽의 C2C-CC( 완성차 12업체참여 ) 의경우, 구현방식차이로발생하는통신오류로인한사고를방지하기위해완성차연합체에정부참여방식이추진되고있다. 자율주행자동차에필요한 V2X 통신은 WAVE 통신방식이표준기술로자리잡고있는추세이다. WAVE 통신은고속, 장거리, 양방향통신이가능하며, 차량이고속으로이동하는전파환경에서정보를 1/20초이내짧은시간에주고받을수있다. 유럽과미국은 WAVE 기술을개발중이고, 일본은 DSRC 기술을고수하고있다. 이동통신기술인 5G 통신을통해서도 V2X 통신이구현가능하지만, 아직까지는개념설계단계이고구체적인사양이제시되고있지않고기술개발중이라고할수있다.
78 20 자율주행을위한 V2X 통신은통신보완과더불어개인정보보호문제를해결해야한다. 이는 V2X 통신속도향상을위해통신과정에서개인인증절차가생략되기때문에통신보완에취약하기때문이다. 통신의단절로인해발생할수있는사고위험을최소화하기위해통신방식을이중화하는추세이다. 나. 판단및제어기술 자율주행자동차는도로주행중전방차량을추월하거나, 도심에서보행자, 신호등을인식해위험을회피하는등대응해야할대상이복잡해지고돌발상황도발생하기때문에고도화된차량의판단능력이필요하며관련소프트웨어의개발이활발히진행되고있다. 예를들어, 도심지에서보행자, 신호등, 돌발상황, 공사상황등에서차선변경, 추월, 차선유지, 도로주행중일반운전자와상호작용해야하는상황등차량의복합적판단이요구된다. ADAS ( 운전보조장치 ) 는주행중인운전자에게정보를제공하고, 위험한상황이예상되는경우에는운전의편의성을향상시키며, 충돌완화및회피, 사각지대감시등을통한안전도를향상시킬수있다. 자율주행을위한서비스기능을예를들면 < 표 2-3> 과같고, 자율주행의수준이높아질수록고난이도의판단과제어가요구된다. < 표 2-3> 자율주행주요서비스 서비스명 FCW (Forward Collision Warning) 전방충돌경고 UWS (Ultrasonic Warning System) 근거리물체경고 SOWS (Side Obstacle Warning System) 차선변경경고 DWS (Drowsiness Warning System) 졸음운전방지시스템 세부내용주행차선의전방에서동일한방향으로주행중인자동차를감지하여전방자동차와의충돌회피를목적으로운전자에게시각적, 청각적, 촉각적경고 초음파센서를이용하여사방근거리의물체를검지하고경고 차선변경시접근차량유무를경고 핸들조작및차량운행상태등에서변동을파악하여음성이나향기, 진동등으로경고
79 제 2 장자율주행자동차기술개발및현황분석 21 서비스명 VES (Vision enhancement System) 양호한운전시계의확보시스템 세부내용 악천후시나야간에운전시계를양호하게확보하여인지도를높여사고를예방 주행하고있는차로를운전자의의도와무관하게벗어나표류하는것을방지하기위해운전자에게시각적, 청각적, 촉각적경고 LDW (Lane Departure Warning) 차선이탈경고 AEB (Advanced Emergency Braking) 자동비상제동 ACC (Adaptive Cruise Control) 적응순항제어 ESC (Electronic Stability Control) 차량자세제어 LKAS (Lane Keeping Assistance System) 차선유지보조 CAS (Collision Avoidance System) 충돌회피 APAS (Automatic Parking Assistance System) 자동주차지원 BSD (Blind Spot Detection) 사각지대감시장치 RCW (Rear-end Collision Warning System) 후방충돌경고장치 TJA (Traffic Jam Assist) 혼잡구간주행지원시스템 주행차선의전방에위치한자동차와의충돌가능성을감지하여운전자에게경고를주고운전자의반응이없거나충돌이불가피하다고판단되는경우, 충돌을완화및회피시킬목적으로자동차를자동적으로감속주행차선의전방에서동일한방향으로주행중인자동차를자동으로감지하여그자동차의속도에따라자동적으로가 감속하며안전거리를유지자동차가주행중급격한핸들조작등으로노면에서미끄러지려고할때자동제어하여자동차자세를안정적으로유지주행하고있는차로를운전자의의도와무관하게이탈하려는것을감지하여운전자에게경고를주고운전자의반응이없거나차선을이탈한다고판단되는경우, 차선이탈방지를위할목적으로본래주행중이던차로로복귀하도록제어차량주변의레이더나카메라를통해주변차량의상태나교통상황을검지하고능동적으로충돌을회피주차지역내의장애물과주차가능공간을인식하고조향과제동액추에이터로주차를자동으로수행하여운전자의주차조작을보조접근하는자동차그리고사각지대에위치한자동차에대한정보를운전자에게제공하는장치로사가지대에있는자동차등을인지하고못하고, 차선을변경하거나근접하는자동차로인해사고위험이감지되는경우미연에사고를방지하기위한안전장치주행차선의후방에서동일한방향으로주행중인자동차를감지하고, 후방자동차화의충돌을회피하거나완화를목적으로운전자에게시각적, 청각적경고를주기위한장치 같은차선에있는앞차와일정간격을유지하는기본액티브크루즈콘트롤의기능은물론, 장애물이감지되면자동으로스티어링을조절하여안전하게피해주는기능을포함
80 22 3. 자율주행자동차기술단계정의및운전자역할 미국의도로교통안전청인 NHTSA (National Highway Traffic Safety Administration: NHTSA) 와미국자동차기술협회인 SAE(Society of Automotive Engineers: SAE) 에서자율주행기술단계를정의하고있다. < 표 2-4> 는두기관의정의를비교한것이다. NHTSA에서는자율주행자동차를자율주행기능이전혀없는일반적인차량에서부터완전자율주행까지의 5단계로구분하고있다. 0 2단계까지는주로 ADAS 와같은기능이탑재되었다고본다면, 3단계는제한적자율주행, 4단계는완전자율주행의형태로구분하고있다. NHTSA 에서정의한 3단계를운전자의즉각적인조작이가능한가의유무에따라두단계로나누어구분하고, 3단계이후에는반드시도로의도움이있어야한다고제시하고있다. 특히부분자율주행단계인 2-3단계기술의경우운전자와자동차의상호작용이필요한기술수준으로운전자의기술에대한수용성이향후상용화보급에큰영향을미칠것으로판단된다. 미국의 DOT(Department of Transportation) 에서는자율주행자동차와관련하여일반인들의자율주행자동차에대한수용성향상을위한이해를중요하게생각하고있다. 이에따라일반인의수용성, 특히자율주행자동차의운행에따른일반인의우려사항을파악하고, 자율주행자동차의윤리와이용및운행책임에대한논의를활발히진행하고있다. SAE에서정의하는자율주행자동차의기술단계는 NHTSA와유사하게정의하고있다. SAE 에서는자율주행자동차의기술수준을 0부터 5단계까지구분하였고, 0~3 단계까지는 NHTSA 의구분과유사하다고할수있다. 그러나 3단계이상의자율주행자동차의기술수준구분은다소차이를보이고있다. NHTSA 의 4단계를한단계더세분화하여 4단계와 5단계로구분하였고, 도로부문역할의중요성을제시하였다는특징이있다.

81 제 2 장자율주행자동차기술개발및현황분석 23 < 표 2-4> SAE 와 NHTSA 의자율주행기술단계정의 단계정의개요기술 Level 0 Level 1 Level 2 비자동 (No Automation) 운전자보조 (Driver Assistance) 부분자율주행 (Partial Automation) - 항시동적운전에대한모든것을운전자가담당 Lane departure warning LKA Type I Blind spot warning - 운전환경정보를이용하여핸들조향과가속 / 감속중하나의기능에대해 CC 서운전자를도와주는단계 ACC - 그외다른동적운전에대해서는운 LKA Type II & III 전자가담당 - 운전환경에대한정보를이용하여핸들조작과가속 / 감속모두에대해서운전자를도와주는단계 - 그외다른동적운전에대해서는운전자가담당 Traffic Jam Assistance Key Parking Level 3 Level 4 Level 5 조건적자율주행 (Conditional Automation) 고도의자율주행 (High Automation) 완전자율주행 (Full Automation - 운전자의적절한대응을전제로모든동적운전을자동화하는단계 - 운전자의적절한대응없이도모든동적운전을자동화하는단계 - 사람이운전할수있는모든도로와환경적조건에서완전한자동화가가능한단계 Traffic Jam Chauffeur Driverless Valet Parking Traffic Jam Pilot Urban robot taxi Universal robot taxi 자료 : SAE 자동주행기술국제표준 J3016 와 NHTSA automation level 을재구성한것임 자료 : IT & Future Strategy, , p.34 < 그림 2-5> SAE 와 NHTSA 에서의자동운전레벨정의
82 24 < 표 2-5> 의자율주행기술단계별운전자의역할을살펴보면, 0 단계의경우자율주행기능이전혀없기때문에운전자는모든자동차운행기술을독자적으로수행해야한다. 기술주순단계 1에서구현할수있는서비스는 Adaptive Cruise Control( 적응순항제어 ) 혹은 Lane Keeping Assistance( 차선유지지원 ) 등의서비스단독제공이가능한수준이라고할수있다. 이단계에서운전자는계속주행환경을주시하면서차선유지혹은차간거리유지와더불어다른필요한운전기능은반드시수행해야한다. 자율주행기술 2단계는부분적자율주행단계라고할수있으며, 대표적인서비스는 Adaptive Cruise Control ( 적응순항제어 ) 와 Lane Keeping Assistance ( 차선유지지원 ) 등의서비스를동시에구현할수있으며, Traffic Jam Assistance ( 교통정체주행지원 ) 과같은기능을구사할수있는수준이다. 기술 2단계에서운전자의역할은도로주행환경을반드시모니터링해야하고시스템은차선유지와차간간격등을자동으로유지할수있어야한다. 자율주행기술 3단계는조건부자동화기술단계로대표적인서비스는 Traffic Jam Pilot ( 교통정체주행시범 ) 과 Automated Parking ( 자동주차 ) 등의서비스를구현할수있어야한다. 기술 3단계에서운전자의역할은필요에따라부분적으로자동차를제어할수있도록대기하는것으로운전자는차내에서독서, 문자, 전화통화등의전방주행에태만할수있다. 자율주행기술 4단계는고수준의자동화단계로대표서비스는 Highway Driving Pilot ( 도로주행시범 ), Closed Campus Driverless Shuttle ( 학교캠퍼스무인셔틀 ), Driverless Valet Parking( 무인주차 ) 등의기능을수행할수있어야한다. 기술 4단계에서운전자는수면을취할수있으며, 자율주행시스템은필요시위험을최소화하도록자율적인조치가가능해야한다. 자율주행기술 5단계는완전자율주행단계로대표적인서비스는 Automated Taxi ( 자율주행택시 ) 및 Car-share Repositioning system ( 차량공유자동배치시스템 ) 라고할수있다. 완전자유주행단계에서운전자의역할은없으며, 운전자는승객의입장에서자율주행자동차를이용하게된다.
83 제 2 장자율주행자동차기술개발및현황분석 25 < 표 2-5> 자율주행기술수준에따른운전자역할 수준 시스템적용예 운전자역할 Adaptive Cruise Control( 적응순항제어 ) 혹은 Lane Keeping Assistance( 차선유지 지원 ) 수준 1 운전자지원 수준 2 부분적자동화 수준 3 조건부자동화 수준 4 고수준자동화 수준 5 완전자동화 Adaptive Cruise Control ( 적응순항제어 ) 와 Lane Keeping Assistance ( 차선유지지원 ) 동시구현 Traffic Jam asistance( 교통정체주행지원 ) Traffic Jam Pilot ( 교통정체주행시범 ) Automated Parking ( 자동주차 ) Highway Driving Pilot ( 도로주행시범 ) Closed Campus Driverless Shuttle ( 학교캠퍼스무인셔틀 ) Driverless Valet Parking( 무인주차 ) Automated Taxi ( 자율주행택시 ) Car-share Repositioning system ( 차량공유자동배치시스템 ) 운전자는계속주행환경을주시하면서차선유지혹은차간거리유지외다른필요한운전기능은반드시수행 운전자는도로주행환경을반드시모니터링해야하고시스템은차선유지와차간간격등을자동유지 운전자는차내에서독서, 문자, 전화등을해도되지만필요시에는제어권을받아운전할수있도록대기 운전자는잠을잘수도있고, 시스템은필요시위험도가최소화하도록조치가능 운전자불필요 제 2 절자율주행자동차기술개발분석 1. 자율주행자동차기술개발방향 가. 완성차업체 (car makers) 의기술개발방향 1) 자율주행자동차개발의접근관점완성차업계에서는 자율주행 을운전의불편함을줄여주는기능으로, 지능형운전자보조시스템 (ADAS; Advanced Driver Assistance Systems) 의기술을발전시킨형태로보고있으며, 완전자율주행단계라고하더라도운전자의존재는있는것으로설정하고있다. 예를들면, 볼보 (Volvo), BMW, 아우디 (Audi), 닛산 (Nissan) 과같은대표적인자동차제작사에서는운전자가없는완전자율주행을목표로하는것보다는운전자에게좀더편리하고편안한운행환경및경험을제공하는것이라고할수있다. 11)
 C26 콘셉트 12) 닛산 (Nissan) IDS 콘셉트 13) < 그림 2-6> 자율주행컨셉트카 2) 자율주행자동차의개발목표현재완성차제작자의자율주행자동차기술개발목표는대체로 ADAS 의관점에서 NHTSA 레벨 3 수준의기술을개발하는것이다.")
 Jonathan M. Gitlin, 2016.1, Ars talks about autonomous driving with Audi, ars Technica, 2016.11.30. 접속 12) Megan Geuss, 2015.")
84 26 운전자가느끼는운전의지루함과불편등의해소를통해사고위험성은줄 이면서, 운전의즐거움과개인의이동공간으로서의차량개념은그대로남기 는방향이라고할수있다. 볼보 (Volvo) C26 콘셉트 12) 닛산 (Nissan) IDS 콘셉트 13) < 그림 2-6> 자율주행컨셉트카 2) 자율주행자동차의개발목표현재완성차제작자의자율주행자동차기술개발목표는대체로 ADAS 의관점에서 NHTSA 레벨 3 수준의기술을개발하는것이다. 기술수준 3단계에서자율주행자동차는운전자가항상필요하며, 위급상황시에는운전자에게제어권을전환해야한다는관점에서기술개발을추진하고있다. 이에따라자율주행자동차기술은자동차전용도로등비교적단순하고통제된환경에서의장거리이동시운전자의피로도를낮춰주는것을목표로하는경우가많았다. 그러나최근급격하게발달하는기술에맞춰레벨 4를목표로수정하는경향을보이고있다. 11) Jonathan M. Gitlin, , Ars talks about autonomous driving with Audi, ars Technica, 접속 12) Megan Geuss, , Hanging out in Volvo s concept 26, a reinvented seat for a self-driving car, ars Technica, 접속 13) 닛산 IDS 콘셉트소개영상, (Introducing the Nissan IDS Concept, ), 접속
85 제 2 장자율주행자동차기술개발및현황분석 27 기술개발전략은기존차량의자동감응식순항제어 (ACC; advanced cruise control) 및혼잡구간주행지원시스템 (TJA; Traffic Jam Assist) 과같은지능형운전자보조시스템 (ADAS; Advanced Driver Assistance System) 에자율주행기능을점진적으로부가하여완전한자율주행에이르고자하는전략을구사하고있다. 따라서완성차제작사에서는차량전체의안전성, 보안성을매우중요하게다루고있다. 3) 자율주행자동차개발애로사항완성차업계에서는자율주행자동차기술개발및상용화에있어자율주행기능으로인해차량가격이상승하는것에대해서부담을느끼고있다. 이에따라완성차의가격상승을최소화해야자율주행자동차가보편적으로보급될수있다는입장이다. 또한, 최근구글과애플등의 IT 업체의자율주행자동차개발뿐만아니라자동차공유사업자들의자율주행자동차개발발표는완성차업계의자율주행자동차개발에있어강력한도전이될것으로판단하고있다. 구글이앞선기술력으로자율주행시장을선도하고있으며, 우버 (Uber), 리프트 (Lyft) 등민간교통서비스가차량소비시장의판도를변화시키는중이라고할수있다. 또한자율주행자동차가보편화되면차량의인공지능수준등소프트웨어기술이차량선택의기준이되는경우가발생할수있다. 운전자가존재하는 NHTSA 레벨 3을목표로하는경우, 자율주행모드에서다시운전자에게제어권을이양하는과정이적절하게이루어지지않는상황이발생할수있다. 예를들면, 복잡한운행환경또는긴박한응급상황에서차량이자율주행에어려움을인지하였으나, 운전자가제어권을넘겨받지않는상황등이발생할수있다. 이러한문제는소비자수용성의저해요소로, 자율주행자동차상용화에있어반드시해소해야할중요요소중하나이다. 따라서완성차업체에서는이러한상황발생시자동차운행안전을확보할수있는방안에대한연구개발을추진하고있다.
86 28 자율주행기능이발달하고, 인터넷과의연결성이강조되는커넥티드카 (connected car) 개념이보편화될수록공해문제, 도심교통문제의해법으로카셰어링등이활발해지면서자동차시장이완성차업체에불리하게형성될수있다. 완성차업체들도자체적으로카셰어링서비스의개발및운영하고있으나운영범위나기능측면에서제약조건이큰것으로판단하고있다. 4) 자율주행자동차의서비스대상완성차제작사에서개발하고있는자율주행자동차의주요서비스이용대상은차량을구매하여직접운행하는개인소비자라고할수있다. 포드 (Ford) 에서는 2016년 1월에자율주행테스트차량을기존의 3배인 30 여대로늘려, 완성차업체중최대수치 14) 의차량을자율주행테스트를위해투입하고있다. 또한극한의환경인눈 (snow) 으로덮인도로환경에서도테스트진행시작하였다. GM 에서는기존 ACC ( 자동감응식순항제어 ; adaptive cruise-control) 시스템에조향 (steering), 차선유지 (lane-centering) 기능을결합시킨수퍼크루즈 (Super Cruise) 기능을 2017년출시할계획을발표하였다. 그러나차선변경이나방향전환기능은포함되지않았다. 15) 또한, 운전자가핸들에서손을뗀경우, 눈의움직임을감지하여도로를모니터링하고있는지판단하는시스템도개발중 16) 에있는것으로발표하였다. 볼보 (Volvo) 에서는 2017년까지일반도로에서 100대의자율주행자동차를동시에운행하는프로젝트인드라이브미 (Drive Me) 를진행중 17) 이다. 14) Chris Ziegler, , Ford will have way more fully autonomous research cars on the road this year, The Verge, 접속 15) Lulu Chang, , General Motors is delaying its semiautonomous driving technology, Yahoo news, 접속 16) Adrienne Lafrance, , The high-stakes Race to Ride the World of Human Drivers, The Atlantic, 접속 17) James Scoltock, , Volvo works with microsoft on autonomous driving; OEM will initially use holographic systems, Automotive Engineer, 접속
87 제 2 장자율주행자동차기술개발및현황분석 29 르노-닛산 (Renault Nissan) 의 CEO 카를로스곤 (Carlos Ghosn) 은운전자가없는완전자율주행은목표가아니라고 18) 선언하였다. 또한고속도로, 시내도로등모든지역에서완전자율주행은 2020년까지가능할것으로보고, 2020년까지 10 대의자율주행자동차를선보일계획을발표하였다. 이에따라기술개발을통해 2016년에단일차선자율주행 (single-lane control), 2018 년에다차선자율주행 (multi-lane control) 기능개발을목표로하며, 최종적으로교차로등에서의자율주행기능까지완성시킬계획을발표하였다. 기아 (Kia) 자동차는부분적으로자율주행이가능한차량을 2020년까지출시할계획이며, 완전자율주행자동차의개발은 2030년으로예상하고있다 19) 고발표하였다. 또한운전자의얼굴표정등을감지하여운전자가의식을잃는등응급상황발생시, 차량을도로변에주차하고도움을요청하는메시지를자동으로발송하는시스템을개발중이다. 그러나사고발생시승객을보호하는관점에서기술을개발해온완성차업체의각종안전관련기술및연구개발내용이사고발생을근본적으로막는상황에서는의미가퇴색할수있다. 또한자율주행도중사고발생시책임문제처리가곤란한상황에서제조물책임법에따라모든책임을완성차업체로돌리는경우, 기술개발및시장위축우려도존재한다. < 표 2-6> 주요완성차업체사례 업체 포드 (Ford) GM 사례내용 년 1 월에자율주행테스트차량을기존의 3 배인 30 여대로늘림. 완성차업체중최대수치 - 눈 (snow) 덮인도로환경에서도테스트진행시작 - 기존 ACC( 자동감응식순항제어 ; adaptive cruise-control) 시스템에조향 (steering), 차선유지 (lane-centering) 기능을결합시킨수퍼크루즈 (Super Cruise) 기능을 18) Ina Fried, , Riding in Nissan s Self-Driving Car is Still a White-Knuckle Affair(Video), Recode, 접속 19) Jacques Deshaies, , Autonomous Kia Soul: Level 4 Achieved, Level 5 Comiing Soon, The CarGuide, 접속
88 30 업체 볼보 (Volvo) 사례내용 2017 년출시계획. 차선변경이나방향전환기능은포함되지않음 - 운전자가핸들에서손을뗀경우, 눈의움직임을감지하여도로를모니터링하고있는지판단하는시스템도개발중 년까지일반도로에서 100 대의자율주행자동차를동시에운행하는프로젝트인드라이브미 (Drive Me) 진행중 르노 - 닛산 ( Renault - Nissan) - CEO 카를로스곤 (Carlos Ghosn) 은운전자가없는완전자율주행은목표가아니라고함 - 고속도로, 시내도로등모든지역에서완전자율주행은 2020 년까지가능예측 년까지 10 대의자율주행자동차를선보일계획 년에단일차선자율주행 (single-lane control), 2018 년에다차선자율주행 (multi-lane control) 기능을목표로하며, 최종적으로교차로등에서의자율주행기능까지완성시킬계획 기아 (Kia) - 부분적으로자율주행이가능한차량을 2020 년까지출시할계획이며, 완전자율주행자동차는 2030 년으로예상함 - 운전자의얼굴표정등을감지하여운전자가의식을잃는등응급상황발생시, 차량을도로변에주차하고도움을요청하는메시지를자동으로발송하는시스템을개발중 완성차업체에서는또한자율주행자동차를이용한자율주행자동차개발프로젝트를추진하고있다. 포드사는소규모그룹이차량 1대를공동으로리스 (lease) 해서공유할수있는서비스, GoDrive 등다양한공유서비스를개발하고시험운행중 20) 인것을발표하였다. < 표 2-7> 완성차업체의카셰어링사례 업체카세어링사례내용 포드 GM - 소규모그룹이차량 1 대를공동으로리스 (lease) 해서공유할수있는서비스, GoDrive 등다양한공유서비스를개발및시험중 - 뉴욕시티 (New York City) 지역에서의카셰어링 (car-sharing) 프로그램인 Let's Drive NYC 서비스를개발 - 차량공유서비스 (ride sharing) 업체인 Lyft 에 5 억달러를투자하였고, 공유서비스 (ride sharing) 에특화된자율주행자동차를개발하기위한공동프로젝트를시작 - 우버 (Uber) 의경쟁사였던사이드카 (Sidecar) 를인수 20) Jordan Golson, , Ford wants you to make a private car-share with your friends, The Verge, 접속
89 제 2 장자율주행자동차기술개발및현황분석 31 GM 에서는뉴욕시티 (New York City) 지역에서카셰어링 (car-sharing) 프로그램인 Let's Drive NYC 서비스를개발 21) 하고있으며, 차량공유서비스 (ride sharing) 업체인 Lyft에 5억달러를투자하고공유에특화된자율주행자동차를개발하기위한공동프로젝트를시작 22) 하였다. 또한우버 (Uber) 의경쟁사였던사이드카 (Sidecar) 를인수 23) 하였다. 자율주행모드에서운전자및승객에게제공되는인포테인먼트시스템및컨텐츠분야에서통신업체나 IT 업체와의협력또는시장개척필요에따라일부완성차업체에서는관련협업을추진하고있다. 볼보에서는에릭슨과연합하여자율주행자동차에컨텐츠를제공하는시스템을개발하고있다. 토요타에서는자사의차량에모바일앱을적용시키는시스템으로포드 (Ford) 의오픈소스플랫폼인스마트디바이스링크 (SDL; Smart Device Link) 를적용할계획이다. SDL은구글 (Google) 의안드로이드오토 (Android Auto) 나애플 (Apple) 의카플레이 (CarPlay) 와유사한기능으로, 음성명령이나차량의기존인터페이스를통해서사용자와모바일어플리케이션을연결시켜주는시스템이다. < 표 2-8> 완성차업체의인포테인먼트시스템개발사례 업체 개발사례내용 볼보 (Volvo) - 에릭슨 (Ericsson) 과연합하여자율주행자동차에컨텐츠를제공하는시스템개발 토요타 (Toyota) - 자사의차량에모바일앱을적용시키는시스템으로포드 (Ford) 의오픈소스플랫폼인스마트디바이스링크 (SDL; SmartDeviceLink) 를적용할계획 - SDL 은구글 (Google) 의안드로이드오토 (Android Auto) 나애플 (Apple) 의카플레이 (CarPlay) 와유사한기능으로, 음성명령이나차량의기존인터페이스를통해서사용자와모바일앱을연결시켜주는시스템 21) Chris Ziegler, , Let s Drive NYC is GM s new car-sharing program, but it s only for one apartment building right now, The Verge, 접속 22) Daniel Cooper, , GM quitely buys failed Uber rival Sidecar, Engadget, 접속 23) Eric Newcomer 외, , General Motors Salvages Ride-Hailing Company Sidecar for Parts, Bloomberg, 접속
90 32 나. IT 업체의자율주행자동차기술개발방향 1) 자율주행자동차개발의접근관점 IT 업체에서는자율주행자동차를개인소유혹은운전의필요성을없애는혁신적인기술로자율주행자동차를이용한카셰어링 (Car-Sharing) 및택시서비스를제공하는것이핵심기술이될것으로전망된다. < 표 2-9> IT 업체의자율주행자동차개발관점 업체 구글 (Google) 개발관점 - 완전자율주행자동차는처음부터운전자를배제한상황을가정하고개발이되어야함 - 지능형운전자보조시스템 (ADAS) 과자율주행자동차는다름. 운전자보조시스템을발전시킨다고해서자율주행자동차를만들수는없으며, 결국에는막다른길에다다를것. 또한, 운전자보조시스템이있다고하더라도운전자가 ( 자신의주행상황을 ) 안전하다고생각하게될때사고의위험이생긴다고함 우버 - 운전자가없는완전자율주행차량을통하여서비스이용비용감소및이용자의 (Uber) 개인정보보호등을목표로함애플 년까지자율주행기능을탑재한전기차량출시계획. 프로젝트타이탄 (Apple) (Project Titan) 년에완전자율주행택시서비스를목표로하는스타트업 Zoox - 개발중인자율주행자동차 ( 코드명 L4) 에는운전대와브레이크등이없으며 4명의승객이서로마주보며앉는구조로되어있음 구글은지능형운전자보조시스템 (ADAS) 과자율주행자동차는크게다르다고보고, 운전자보조시스템을발전시킨다고해서자율주행자동차를만들수는없는것으로판단하고있다. 또한, 운전자보조시스템이있다고하더라도운전자가 ( 자신의주행상황을 ) 안전하다고생각하게될때사고의위험이생긴다고 24) 판단하고있다. 우버는운전자가없는완전자율주행자동차를통하여서비스이용비감소및이용자의개인정보보호등을목표로기술개발 25) 을하고있다. 24) Chris Urmson, , How a driverless car sees the road, Ted.com ( 영상자료 ), 접속 25) Valerie Edwards 외, , Do these self-driving Ubers spell the end of the cab driver? Taxi giant to introduce driverless cars in Pittsburgh within weeks, Dail online, 접속
26)을 추진하고 있는 것으로 알려졌다.")
 하였다.")
 Adrienne Lafrance, 2015.")
 Mark Harris, 201")


91 제2장 자율주행자동차 기술개발 및 현황 분석 33 애플은 2019년까지 자율주행기능을 탑재한 전기 차량를 출시할 계획으로 프로젝트 타이탄(Project Titan)26)을 추진하고 있는 것으로 알려졌다. Zoox는 2020년에 완전자율주행 택시 서비스 개발을 목표로 하는 스타트업 기업으로, 개발 중인 자율주행자동차(코드명 L4)에는 운전대와 브레이크 등이 없으며 4명의 승객이 서로 마주보며 앉는 구조로 되어 있다고 발표27) 하였다. 구글(Google) 28) 바이두(Baidu) - BMW30) 우버(Uber)29) Zoox31) <그림 2-7> 주요 IT 업체의 자율주행 시험 차량 26) Adrienne Lafrance, , The high-stakes Race to Ride the World of Human Drivers, The Atlantic, 접속 27) Mark Harris, , Meet Zoox, the Robo-taxi Start-up Taking on Google and Uber, IEEE Spectrum, 접속 28) 접속 29) Alex Davies, , We take a ride in the Shelf-Driving Uber now Roaming Pittsburgh, Wired, 접속 30) Tian Ying, , Baidu Enters the Global Race for Driverless Car Domination, Bloomberg Market, 접속 31) Mark Harris, , Meet Zoox, the Robo-Taxi Start-up Taking on Google and Uber,
 는기존의교통체계와스마트기기의첨단기능이융합하여보다지능화된미래교통서비스의총체적개념 32) 이라고할수있다. 또한스마트모빌리티는스마트시티 (Smart City) 를구현하는하나의요소이며스마트시티프로젝트중약 50% 이상은도시교통과이동성을혁신하는데집중 33) 되어있다.")
92 34 이들 IT 업체에서추구하는자율주행자동차개발프로젝트는자율주행자동차및관련교통서비스를보는관점이스마트모빌리티 (Smart Mobility) 의접근관점과유사하며, 궁극적으로는스마트시티 (Smart City) 개념에합치한다고볼수있다. 스마트모빌리티 (Smart Mobility) 는기존의교통체계와스마트기기의첨단기능이융합하여보다지능화된미래교통서비스의총체적개념 32) 이라고할수있다. 또한스마트모빌리티는스마트시티 (Smart City) 를구현하는하나의요소이며스마트시티프로젝트중약 50% 이상은도시교통과이동성을혁신하는데집중 33) 되어있다. 스마트모빌리티를통해차량운행량감소, 주차공간감소, 차량운행효율증가등의효과를추구하며, 이는자율주행자동차의개발효과와일맥상통하는부분이있다. 자료 : 서정주 (2015.7) 에서재인용 < 그림 2-8> 스마트모빌리티 IT 기업에서는기업의특성상자율주행자동차의생산보다는자율주행기능및관 련서비스개발에집중하고있다. 구글사의자율주행프로젝트를이끄는크리스엄 슨 (Chris Urmson) 은자율주행소프트웨어를탑재한차량을생산해줄완성차업체 IEEE Spectrum, 접속 32) 홍다희외, 2011, 스마트모빌리티기반의미래교통서비스구축방안, 한국교통연구원, p ) 서정주, KB 지식비타민 : 스마트모빌리티 (Smart Mobility) 현황과전망, p. 1 KB 금융지주경영연구소에서재인용
 < 그림 2-9> 구글의자율주행프로토타입차량 구글의자율주행프로토타입차량 36) 의경우조향장치 (steering wheel) 및가속페달이나브레이크가설치되어있지않으며, 승객은차량탑승전또는 34) Adrienne Lafrance, 2015.")
93 제 2 장자율주행자동차기술개발및현황분석 35 와파트너가될수있음을언급 34) 하였다. 그러나프로토타입차량을 2015 년말까지 수백대를직접제작하는것으로목표를변경할수도있음을시사 35) 하고있다. 2) 자율주행자동차의개발목표 NHTSA의자율주행기술정의 4단계인완전자율주행을목표로하며, 차량의운전자는불필요한것으로정의하고있다. 따라서자율주행에대해서운전자가개입하는것을고려하지않다. 자료 ::Wayne Caswell (2014) < 그림 2-9> 구글의자율주행프로토타입차량 구글의자율주행프로토타입차량 36) 의경우조향장치 (steering wheel) 및가속페달이나브레이크가설치되어있지않으며, 승객은차량탑승전또는 34) Adrienne Lafrance, , The high-stakes Race to Ride the World of Human Drivers, The Atlantic, 접속 35) Mark Harris, , Google reveals plans to increase production of self-driving cars, The guardian, 접속 36) 구글의새로운자율주행차 (Hands-Free Driving - Google s New Driverless Car ), 접속
94 36 차량에탑승하여목적지만입력하며, 운행중위급상황시에차량을정지시키는정도의관여만을하고있다. 이러한수준의승객개입은도시철도 ( 서울지하철등 ) 와유사한수준으로, 도시철도내에서위급한상황 ( 화재및사고 ) 이발생할경우, 승객은수동으로전동차를정지시키고, 자동문을열어차량에서탈출하는정도의개입이라고할수있다. 또한숙련된인간운전자이상의운전능력을구현하는것을목표로하여통제되지않은환경에서발생가능한모든경우의수에대한대비를갖추고자한다. 구글은경찰차, 스쿨버스등을일반차량과구별하여인식하고, 경찰의수신호를인식가능하도록프로그램을개발하고있다. 또한예측모델을적용하여도로위차량이나자전거이용자, 보행자등의다음행동을예측하여주행경로를결정할수있도록하고있다. 또한외부환경인지가어려워지는극한상황 ( 역광, 비, 눈, 우박, 먼지가많음 ) 을극복하기위해지속적인연구를추진중에있다. 3) 자율주행자동차의서비스대상 IT 업체에서추구하는완전자율주행자동차의서비스이용대상은차량을직접소유혹은운행하지않는개인으로, 자율주행자동차의소유권은정부, 지자체, 교통서비스업체등이보유하는것을목표로한다. 이에따라 IT업체에서추구하는완전자율주행자동차의주요서비스는현재제공되는대중교통과유사하나제공되는서비스단위는다양할수있다. 목표로하는이용대상자는노약자, 어린이등교통약자, 차량운행이많지않은개인, 도시교통환경개선을추구하는지자체등이라고할수있다. 4) 자율주행자동차개발애로사항완전자율주행자동차개발에있어최근대두되고있는문제는법 제도 ( 보험등 ) 와관련된문제점이라고할수있다. 새로운기술과관련된법 제도개선속도는 IT 업체의기술발전속도보다느린것이보통이다.
95 제 2 장자율주행자동차기술개발및현황분석 37 미국캘리포니아주의자동차국 (Department of motor vehicles) 에서 2015 년 12월발표한무인주행차이용을위한가이드라인과규제초안에따르면, 캘리포니아도로에서주행하는자율주행자동차에는운전자가반드시탑승해야하며, 운전대를지켜야한다고규정하고있다. 또한, 자율주행자동차의운전자는별도의특별교육을이수해야하고, 일반대중은자율주행자동차를구매할수없으며회사로부터리스만가능 37) 한것으로규정하고있다. 미국정부는 2016년 1월, 향후 10년간자율주행자동차분야에 39억달러를투자할것을발표하였고, 2016년 7월까지자율주행자동차의개발에장애가되는제도를제거한연방지침 (federal guidelines) 을발표하겠다고 38) 하여, 자율주행자동차관련기술발전속도를고려한제도개선을추진하고있다. 또한자율주행자동차와관련하여나라마다다른법 제도로인하여자율주행과관련된특정서비스가각국의운송관련법규와충돌이발생할가능성이높다. 차량공유서비스인우버 (Uber) 는 2013년 8월한국에서공식도입후, 여러논란을일으키다 2015년 3월에우버엑스 (X) 서비스를중단 39) 하였다. 또한독일의프랑크푸르트, 함부르크, 뒤셀도르프에서도사업을철수했으며, 캐나다의토론토, 알버타, 캘거리에서는우버와택시기사연합이충돌 40) 한바있다. 늦은밤, 비슷한경로로이동하는사람들을실시간으로연결해버스를공유하는서비스인콜버스는서울시개인택시운송사업조합으로부터택시의업권을침해하며, 전세버스요금개별수수제도를위반했다고문제가제기되어, 2016년 1월말, 국토교통부의최종해석을기다리는상황 41) 이다. 37) Philip E. Ross, , California Says Driverless Cars Must Have Drivers, IEEE Spectrum, 접속 38) Martin Powers, , Congress gears up for drivereless cars, POLITICO, 접속 39) 이성규, 우버한국진출에서현재까지, < 접속 40) 장혜림, 우버의치솟는몸값, 기회와위기? < %84%EA%B8%B0/> 접속 41) 장혜림, , 스타트업이규제에대응하는 5 가지현명한방식, < 4-%EA%B7%9C%EC%A0%9C%EC%97%90-%EB%8C%80%EC%9D%91%ED%95%98%E
96 38 이렇게기존에형성된시장의참여자들과새로운서비스의제공자들간의충돌이발생하고있으며, 무인자동차공유및택시서비스에서도향후유사한문제가발생할가능성을배제할수는없을것이다. IT 업계에서개발하는자율주행자동차기술은운전자에게제어권을넘기지않는완전자율주행차량을목표로하므로, 차량운행중에발생가능한모든상황에대비를해야한다. 즉, 숙련된운전자와동일하거나그이상의수준으로각종상황에차량스스로대처할수있어야한다. 이렇게높은기술수준의 S/W 및차량에서안정적으로이용할수있는고성능연산처리장치가필요하다. 이를위해각종교통상황에효과적인대처체계를확립하고외부환경인지에불리한기상상황을극복할수있는기술개발이필요하다. 이밖에차량의자율주행성능및안정성등에대한소비자의신뢰문제, 자율주행중발생한사고에대한책임문제등의난제를해소해야한다. 다. 완성차 IT 업계의자율주행자동차개발방향비교 앞서살펴본바와같이 IT 업계와완성차업계에서바라보는자율주행자동차에대한견해차이를주요쟁점별로정리해보면 < 표2-10> 과같다. 자율주행자동차 ( 스마트카 ) 와스마트폰을비교한쟁점에서 IT업계에서는이를바퀴달린스마트폰으로보며, 스마트폰이상으로인간의생활과사업을변화시킬것으로보고있다. 반면, 완성차업계에서는자율주행자동차는스마트한자동차로보고안전과편의성측면에서조금더완벽한차라고인식하고있어다소보수적인견해를가지고있다. B%8A%94-5%EA%B0%80%EC%A7%80-%ED%98%84%EB%AA%85%ED%95%9C-%EB %B0%A9%EC%8B%9D/> 접속
97 제 2 장자율주행자동차기술개발및현황분석 39 < 표 2-10> 자율주행차를바라보는 IT 업계와완성차업계의관점 IT 업계주요쟁점완성차업계 바퀴달린스마트폰, 스마트폰이상으로인간생활과사업재창조 구글및애플등 IT 업계 스마트카는제 2 의스마트폰인가 누가주도하나 스마트한자동차, 안전과편의성측면에서조금더완벽한차완성차업계, 구글및애플은프랫폼공급자일뿐 년가능완전자율주행자동차는언제최소 10년이상걸릴것빅데이터, 인공지능, 디자인, 안전성등도중요한스마트카의경쟁력은운영체제 (OS) 요소인간과비교할수없을특정구간에서만자율주행을자율주행자동차는안전한가정도로낮은사고율허용하는것이현실적 자료 : 중앙일보 ( ), < 접속 기술의선도는완성차업계에서주도하고있으며, 구글과애플등과같은 IT 업계로플랫폼공급자일뿐이라고보고있다. 또한완전자율주행자동차상용화시기에대한쟁점에서 IT업계에서는향후 5년이내에완전자율주행이가능할것으로보고있는반면, 완성차업계에서는최소 10년이상걸릴것으로보고있어다소차이가이다. 마지막으로자율주행자동차의안전성에대한쟁점에서 IT 업계에서는인간과비교할수없을정도의낮은사고율을기록하고있기때문에좀더안전한자동차가될것으로보고있는반면, 완성차업계에서는특정구간에서만자율주행을허용하는것이현실적이라는견해이다. 2. 자율주행자동차발전방향 가. 자율주행자동차기술개발현황 IT 업체중구글 (Google) 이시장개척자의위치에서빠른속도로기술개발을추진하여다른업체들에비해서비교우위에있으나, 기술적으로극복해야할과제는아직까지많이남아있는상황이다. 구글은미국 NASA 에서주최한무인자동차 Urban Challenge 우승팀의연구진을채용하여 2009년부터자율주행자동차에대해연구하기시작하였다.
98 년 12월말현재, 자율주행모드로일반도로에서약 220만 km (1,372,111 마일 ) 의누적주행거리를기록하고있고, 일반도로에서매주 16,000-24,000 km 의거리를주행하며테스트중에있다. 현재구글은테스트주행의대상지역으로미국캘리포니아주마운틴뷰 (Mountain View, CA), 택사스주오스틴 (Austin, TX) 등의지역을선정하여테스트하고있다. 구글의자율주행기술의안전도는연간 12,000 마일을운행하는미국의차량평균주행기준으로볼때, 1년에 10번정도운전자의개입이필요한수준인것으로나타났다. 이에대해사우스캐롤라이나대학 (University of South Carolina) 브라이언트워커스미스 (Bryant Walker Smith) 교수는 대단히높은수준은아니지만, 무시할수준도아니다 고평가하였고, 카네기멜런대학교 (Carnegie Mellon University) 에서자율주행자동차를연구하는 Raj Rajkumar 교수는문제발생률은 매우낮지만 차량의운전석에는훈련된운전자가있어야만한다고평가 42) 하였다. 1) 자율주행자동차운행테스트현황자율주행자동차는고정밀지도가이미구축된지역에서는맑은날씨하에서의자율주행이원활하게작동하지만, 비가오거나, 도로가눈에덮이거나, 야간등사람이외부환경을인지하기어려운환경에서는자율주행차량도센싱에어려움을겪고있다. 이에따라캘리포니아주는맑고온화한기후조건으로자율주행자동차의주행테스트를수행하기에적합한기후로, 전세계에서가장많은자율주행자동차의시험주행을하고있다. < 표 2-11> 는 2014년부터 2015년 6월현재캘리포니아주에등록되어있는자율주행자동차와운전자수를신청사별로정리한것이다. 현재까지구글사에서가장많은자율주행차량과운전자가운행등록을위한안전관련교육 42) Brian Fung 외, , These charts show who s lapping whom in the race to perfect the driverless car, The Washington Post, 접속
99 제 2 장자율주행자동차기술개발및현황분석 41 에참여하여이수하였다. 그다음으로폭스바겐, 테슬라, 닛산에서자율주행자 동차주행시험을위한관련안전교육에참여하고있다. < 표 2-11> 캘리포니아주의자율주행자동차및운전자등록 비고 2014년 10월 2015년 12월 2015년 3월 2015년 6월운전자차량운전자차량운전자차량운전자차량 보쉬 크루즈 델파이 구글 밴츠 니산 테슬라 폭스바겐 자료 : Harris (2015.8) 43) 캘리포니아에서시행된자율주행자동차시험주행거리비교그래프를살 펴보면, 그동안구글은 42 만마일이상을주행하여현재로서는가장높은주 행거리를시험운행하였다. 그다음이델파이사로 16 천마일을주행하였고, 폭스바겐사에서는약 15 천마일을주행한것으로나타났다. 자료 : David Reid 외, (2016) < 그림 2-10> 자율주행자동차시험주행거리비교 ( 캘리포니아주일반도로 ) 43) Harris, ( ), Why California Rules the Robocar Industry ar-industry), 접속
100 42 주행마일당운전자개입비율을보면, 구글은 회로극히드물고, 보쉬와벤쯔사의경우각각 0.67 회와 0.6회인것으로나타나, IT 계열에서개발한자율주행자동차가완성차및부품사에서개발한자율주행자동차에비해운전자전환사례가낮은것으로나타나, 자율주행기술면에서 IT 업계의기술이앞서고있는것으로판단해볼수있다. 자료 : David Reid 외, (2016) < 그림 2-11> 운전자전환횟수 ( 좌 ) 운행마일당운전자전환횟수 ( 우 ) 앞서살펴본바와같이완성차업체는구글에비해기술적으로뒤쳐진상황이라고판단이된다. 르노-닛산 (Renault-Nissan) 의 CEO 카를로스곤 (Carlos Ghosn) 은자전거이용자가어떤경우에는보행자로서, 또어떤경우에는차량으로서행동하기때문에서자율주행자동차가이를정확하게인식하여움직임을예측하지못하고혼동할수있다고하며, 이는자율주행자동차의외부환경인식에있어서큰문제중하나 44) 라고했다. 또한, 폭스바겐 (VW) 의한간부 (executive) 는 2015년 11월에샌프란시스코 44) Carlton Reid, , Makers of driverless cars want cyclists and pedestrians off the roads, BIKEBIZ, 접속
101 제 2 장자율주행자동차기술개발및현황분석 43 에서라스베가스까지자율주행자동차의도로테스트의어려움을설명하며, 회전초 (tumbleweed), 경찰의수신호, 야생동물등모두가차량을혼동시킬수있는요인이라고발표했다. 또한, 차량의센서가좋지않은기상상황으로문제가발생했다 45) 고하여, 차량센서의성능이아직까지는기상변화에대응이어려운것으로판단된다. 델파이 (Delphi) 가제공한자율주행중운전자가개입한사례를보면, 신호등인식문제, 차선인식문제 ( 인프라측문제 ) 등기본적인부분에서문제가많이발생하고있으며, 복잡한교통상황에서는운전자의개입이필요한수준이라는결과를발표했다. < 표 2-12> 원인별운전자전환횟수 주요문제 발생횟수 공사구간 17 정체구간에서차선변경을위한운전자전환 50 응급차량 7 차선표시불량 110 다수의보행자로인한예방적운전자전환 22 자전거이용자를회피하기위한예방적운전자전환 6 Stock 차량불량 8 시스템전환및교정 (Calibration) 62 교통신호감지시 102 다른차량의돌발적행태 21 자료 : Delphi Corporation, , Summary of Autonomous Vehicle Disengagements, 캘리포니아 DMV, p.2 45) David Reid 외, , Driverless cars still confused by cyclists; Renault CEO, CNBC NEWS, 접속
102 44 완성차업체는한정된상황에서레벨 2 또는레벨 3 수준의자율주행자동차를개발하는것을목표로하였으나, IT 업체의기술발전에발맞추어레벨 4 수준으로목표를수정하는추세이며, 발전속도가점차빠르게진행되고있다. 포드 (Ford), 구글 (Google), 닛산 (Nissan), 토요타 (Toyota), 혼다 (Honda), 테슬라 (Tesla) 등은대체로 2020년경에완전자율주행자동차가등장할것으로예상 46) 하였다. 테슬라 (Tesla) 의경우, 완전자율주행자동차의개발이완성되는시기를 2014년경에는 2020년으로예상했으나, 2015년 12월에는 2년내에가능할것으로예상 47) 한다고발표하였다. 포드 (Ford) 와구글 (Google) 은다른경쟁자들은진행하지않고있는눈덮인환경에서자율주행테스트를진행중 48) 이며, 기아 (Kia) 자동차역시캐나다의겨울환경에서시험주행 49) 하고있다고발표했다. 캐나다 (Canada) 온타리오 (Ontario) 남부, 스트랫퍼드 (Stratford) 는무선네트워크가구축된커넥티드시티 (connected city) 환경의자율주행자동차용테스트베드를구축하고, 테스트베드에서는신호정보를차량에제공하고있다. 시스코 (Cisco), 도시바 (Toshiba) 등의업체가가로등및신호등과의통신에서부터주차공간정보를상호전달하는등의서비스를시험 50) 하였다. 자율주행시험차량들은대부분시험용으로제작된프로토타입이며, 연산장치, 전력공급장치, 통신장치등각종부가장치가트렁크공간의대부분을차지하고있다. 이들장치는소형화, 경량화, 저전력화, 안정화등의단계를거쳐야양산가능하며이러한양산과정에도상당한시간이걸릴것으로예상된다. 46) Matt Kwong, , Driverless cars may save lives, but will they kill driving?, CNC news 47) Fortne, , Elon Musk Says Tesla Vehicles Will Drive Themselves in Two Years, <www. foturne.com> 접속 48) Mark Bergen, , Ford Says It s the First Carmaker to Test Self-Driving Cars in the Snow (But Google Has, Too), recode, 접속 49) Jacques Deshaies, , Autonomous Kia Soul: Level 4 Achieved, Level 5 Coming Soon, The CarGuide, 접속 50) Peter Armstrong, , Driverless cars get potential new testing ground in Startford, Ont. CBCnews, 접속
 는오토파일럿 (Autopilot) 기능을통해서차량이운전자로부터자율주행능력을학습받는형태를취하고있다. 테슬라차량은무선인터넷에상시접속되어있는커넥티드차량으로, 각각의차량에서학습한주행정보는네트워크를통해모든차량이공유 51) 할수있도록개발되었다.")
103 제 2 장자율주행자동차기술개발및현황분석 45 < 그림 2-12> 닛산 (Nissan) 자율주행자동차의트렁크내부 2) 완성차업체와 IT 업체간융합자율주행자동차개발에있어고정밀지도데이터및기계학습, 의사결정의설계등이매우중요하며, 방대한지도데이터저장및가공, 인공지능개선등을위해각개발회사마다자체적으로시스템을구축하고있다. 완성차및 IT 업체에엄청난양의고정밀지도데이터와각종주행데이터가누적될것으로예측된다. 테슬라 (Tesla) 는오토파일럿 (Autopilot) 기능을통해서차량이운전자로부터자율주행능력을학습받는형태를취하고있다. 테슬라차량은무선인터넷에상시접속되어있는커넥티드차량으로, 각각의차량에서학습한주행정보는네트워크를통해모든차량이공유 51) 할수있도록개발되었다. 완성차업체 ( 부품업체 ) 와 IT 업체간연합및융합을통한기술개발을활발하게진행중에있다. 우버 (Uber) 는카네기멜런대학 (Carnegie Mellon University) 51) Report: Ford planning separate autonomous car unit, intends to use Google s self-driving software, 접속
104 46 에자율주행자동차연구센터를개설하여기술개발연구에참여하고있다. CES 2016에서포드는아마존 (Amazon) 과협력하여사물인터넷플랫폼인윙크 (Wink) 를통해커넥티드-홈 (connected-home) 장치와차량을연결하는시스템을개발중임을발표 52) 하였다. 윙크는차량내의싱크커넥트 (Sync Connect) 시스템을통하여터치나음성명령으로차고의문을열거나실내온도조절장치의설정을확인하고, 집안의전등을켤수있으며, 반대로, 집에서는포드의스마트폰앱을통해차량의주행가능거리를확인하거나엔진에시동을거는시간을설정할수있는시스템이다. 또한포드와구글은자율주행자동차를제작하기위한동반관계를체결할것이라는소문이계속 53) 되고있다. BMW와바이두 (Baidu) 는중국시장을위한자율주행자동차개발을위해서협력하고있으며, 2015년 12월에베이징에서첫번째테스트 54) 를마쳤다. 닛산과미국항공우주국은자율주행자동차시스템, 로봇공학 (robotics), 인간- 기계인터페이스 (human-machine interface), 소프트웨어분석 / 확인및통신가능한어플리케이션기술등의공동개발에합의 55) 하였다. 52) Marco Della Cava, , Ford partners with Amazon to connect carts with homes, USA Today, 접속 53) Stephen Hall, , Report: Ford planning separate autonomous car unit, intends to use Google s self-driving software, < 접속 54) Tian Ying, , Baidu Enters the Global Race for Driverless Car Domination, Bloomberg Market, 접속 55) NissanNews.com, Nissan and NASA partner to jointly develop and deploy autonomous drive vehicles by end of year, 접속
105 제 2 장자율주행자동차기술개발및현황분석 47 < 표 2-13> 완성차업체 ( 부품업체 ) 와 IT 업체간연합사례 GM - Lyft - 우버의최대경쟁업체인 Lyft 에 5 억달러투자. 자율주행자동차의수요응답형 (on-demand) 네트워크를구축할계획 포드 (Ford) - 아마존 (Amazon) / 구글 (Google) - CES 2016 에서포드는아마존 (Amazon) 과협력하여사물인터넷플랫폼인윙크 (Wink) 를통해커넥티드 - 홈 (connected-home) 장치와차량을연결하는시스템을개발중임을발표 - 차량내의싱크커넥트 (Sync Connect) 시스템을통하여터치나음성명령으로차고의문을열거나실내온도조절장치의설정을확인하고, 집안의전등을켤수있음. 반대로, 집에서는포드의스마트폰앱을통해차량의주행가능거리를확인하거나엔진에시동을거는시간을설정할수있음 - 포드와구글은자율주행자동차를제작하기위한파트너십을체결할것이라는소문이계속됨 BMW - 바이두 (Baidu) 닛산 (Nissan) - 미국항공우주국 (NASA) - 중국시장을위한자율주행자동차개발을위해서협력 년 12 월에베이징에서첫번째테스트를마침 - 자율주행자동차시스템, 로봇공학 (robotics), 인간 - 기계인터페이스 (human-machine interface), 소프트웨어분석 / 확인및통신가능한어플리케이션등의기술을공동개발 3) 자율주행자동차시장전망현재시점에서시장분석및전망은우호적인것으로판단된다. 시장조사업체 IHS는 2025년세계시장에서자율주행자동차연간판매량이 23만대, 2035년에는 1,180만대에이를것으로예상하였다. 컨설팅회사멕킨지는 2030 년글로벌자동차판매량중 15% 가자율주행자동차일것으로전망 56) 하였다. 나. 자율주행자동차발전방향 1) 자율주행상호모니터링부분자율주행및제한적자율주행모드주행에있어운전자와자율주행자동차가상호주시하는방향으로기술개발이이루어질것으로전망된다. 이는 56) 강유현, , 가전쇼접수한차, 기아, 자율주행브랜드첫선, 동아일보 일 B1 면
106 48 자율자행자동차에서운전자로운전제어권을이전할때사고가발생할가능성이높고, 사고발생시피해가높을것으로예측되기때문이다. 예를들면, 항공기의오토파일럿 (Autopilot) 의경우, 자동주행모드에서수동주행모드로변환하는과정 (hand-over) 에서사고발생률이높게나타나며, 자율주행자동차도이에대한대비가필요하다. 자율주행자동차가제어권을운전자에게전환하는경우는정해진자율주행모드를완료한정상적인주행상황인경우와돌발상황발생시긴급히운전권을전환하는경우라고볼수있다. 운전자는자율주행중전방을주시하며, 돌발상황발생시이에대응하여안전하게제어권을인계받아야한다. 현재구현가능한자율주행자동차기술수준은 2~ 3으로, 자율주행모드에서운전자가차량을모니터링하는부분에대한보조가필요하다. 이는자율주행자동차가외부환경을인식하고차량을제어하는범위를운전자도명확하게인식할수있어야하기때문이다. 정상적인상황에서자율주행자동차가제어권을전환하려고할때, 운전자가안전하게제어권을전환받을수있는상황인지파악하고, 안전하게제어권을전환할수있도록차량내부시스템이구축되어있어야한다. 기술수준레벨 2~ 3을목표로하는자율주행자동차는운전자의상태를인식하고판단하는부분도개발중에있다. 이는자율주행자동차가운전자의상태를인지하여, 수동운전모드로전환시의안전성을확보할필요가있기때문이다. 예를들면, 운전자가운전제어권을인계받을수없을수준으로음주상태인경우혹은운전자가자율주행모드로운행중수면중일경우에대비하여자율주행자동차는운전자의상태를모니터링하고, 적정한때에운전권을이전해줄수있도록대응할필요가있다. 또한도로시스템에서도주행모드변환시사고발생률을낮출수있는수단개발이필요하다. 이는자율주행자동차개발과정에는각개발사별로다른시스템을사용하고있으나, 도로시스템인식및도로시스템과의통신등을위해서는관련내용의표준화가진행될것으로예상되기때문이다.
107 제 2 장자율주행자동차기술개발및현황분석 49 2) 자율주행자동차공유서비스미래자동차기술은인간운전자중심에서시스템운전중심의방향으로기술이발전해가는경향을보이고있고, 자동차의소유혹은공유에대한가치가상호대립하고있다고볼수있다. 이러한네가지요소를바탕으로현재의자동차기술과소유형태는인간운전자중심의소유와인간운전자중심의공유로대변된다고볼수있다. 현재자동차기술은 100여년간유지되어온제작자 (OEM) 가시장을선도하는모델로자동차관련기술과정책은공급자중심의자동차생산과판매에집중될수밖에없다. 이에따라이용자는자동차를하나의자산으로인식하고소유에대한가치를크게두고있는모델이라고할수있다. 그러나최근자동차의소유에대한관념은변화하기시작하여점차자동차공유에대한시장이성장하고있다. 당초자동차공유의개념은자동차소비를위한소득이상대적으로낮은계층의근거리 단시간통행수요에적합한교통서비스로소개되었다. 그러나점차대도시를중심으로근거리교통수단으로서비스범위가확대되고있다. 이러한자동차공유서비스는아직까지인간운전자중심의로우테크 (Low-Tech) 공유자동차를제공하는단계로대표적서비스로우버 (Uber) 와같은택시와유사한서비스와, 카투고 (Car2Go) 및소카 (SoCar) 와같은자동차공유서비스가있다. 자율주행자동차의기술개발에따라자동차의운전제어권이인간운전자에서시스템운전자로전이해가고있으며, 기술수준이높은자율주행자동차의소유혹은공유의관점에서서비스가제공되고있다. 소유를중심으로하는자율주행자동차기술은기존의완성자동차제작사 (OEM) 에서개발 공급하는자율주행자동차로대표사는테슬러, 다임러, 아우디등이다. 완전자율주행자동차기술은소유보다는공유에더유리한기술로판단된다. 완전자율주행자동차에서인간은운전자가아닌이용자가될것이고, 자율주행시스템이스스로차고지에서이용자가호출하는곳까지이동하여, 이용자를목적지로통행시키고스스로차고지로되돌아갈수있다. 이러한기술은, 자동차가이용자가원하는때에는언제라도교통서비스를제공할수있는
108 50 시스템의구축을가능하게하여, 공유로인해발생하는이용자의불편을해소할수있기때문이다. 이러한편의성으로인하여자율주행자동차공유서비스시장은더욱확대될수있을것으로전망된다. 현재구글과우버등비제작사업체에서추구하는서비스목표는이러한완전자율주행자동차공유서비스인것으로전망된다. 자료 : 모간스텐리 (2015) 를재구성함 < 그림 2-13> 자동차산업의미래방향 최근발표되고있는많은미래전망보고서에서는자율주행자동차기술의등장에따라자동차문화가소유보다는보유로이동해가는트랜드변화를예측하고있다. 바클레이즈캐피탈의최근리포트에따르면, 자율주행기술로인하여차량판매는 40% 감소하고, 도로위에서운행하는차량의숫자는 60% 감소할것으로예측 57) 하였다. 또한, 미국의차량중 50% 이상이통근, 통학용도로사용된다고밝히며, SAV( 카셰어링으로공유된자율주행자동차 ; Shared Autonomous driving) 는 57) Benjamin Perston, , Insurances Brace for the Self-Driving Future and Fewer Accidents, the New York Times, 접속
 는오스틴 (Austin) 의교통상황을시뮬레이션한결과, SAV 1대가기존차량 9대를대체할수있다는결과를얻었다. SAV 1대의운행거리는기존차량의 5배에불과한것으로나타났다.")
109 제 2 장자율주행자동차기술개발및현황분석 51 기존차량에비해서 58% 저렴한비용 (1 마일당 0.34 달러 ) 으로운행가능할 것으로추정하고, SAV 에 2 명의승객이탑승하는경우에는, 1 마일당 0.16 달 러로운행비용이더욱저렴해질것으로추정하였다. 자료 : 콜롬비아대지구연구소, Program on Sustainable Mobility < 그림 2-14> 자율주행자동차공유효과 텍사스대학교 (University of Texas) 는오스틴 (Austin) 의교통상황을시뮬레이션한결과, SAV 1대가기존차량 9대를대체할수있다는결과를얻었다. SAV 1대의운행거리는기존차량의 5배에불과한것으로나타났다. 또한공유로인하여자동차보유가 90% 감소할경우, 마일당통행비용의 80% 이상감소할것이며, 자동차활용성은 75% 이상향상되고, 주차공간등의감소에따라토지이용이효율화될것이라는분석을발표하였다.
110 52 < 표 2-14> 자율주행자동차의효과 구글의포부연간잠재편익 ( 미국 ) 교통사고발생 90% 감소 불필요한통행 90% 감소 자동차보유 90% 감소 교통사고 4.95 백만건감소교통사고사망자 3 만명감소교통사고부상자 2 백만명감소교통사고관련비용 4 천억달러감소 통근통행시간 48 억시간감소휘발유사용 19 억겔런의감소생산성및연료비용 1.01 천억달러감소 마일당통행비용 80% 이상감소자동차활용성 5-10% 에서 75% 이상으로향상토지이용효율화 자료 : 구글, US NHTSA, AAA, 텍사스 A&M 연구소, 콜롬비아대지구연구소, Devil s Associate Group 분석 OECD ITF 의기업파트너십위원회보고서 (Corporate Partnership Board Report) 중도시이동시스템개선 (Urban Mobility System Upgrade) 58) 에따르면, 도심교통환경에서자율주행자동차의영향에대해서분석한결과, 중간규모의유럽도시 (midsize European city) 에서경량전철 (light rail) 과연계하여자율주행자동차공유서비스를운영하는경우현재도심을운행하는차량의 10% 만으로도동일한수송능력을보일수있다고분석하였다. 또한출퇴근시간대에도이동시간을 10% 감소시킬수있으며, 도로공간의 20%, 주차장면적은 80% 를줄일수있을것으로분석하였다. < 표 2-15> 케어프리 (Care-Free) 한차량 ( 자율주행자동차및차량공유 ) 의장단점 장점차량에대한의존성감소운행차량숫자감소안전한멀티태스킹 ( 다중작업 ) 생산성향상에너지효율성증가교통사고감소 단점 도시계획의큰변화필요사생활침해소지 ( 자율주행자동차개발 ) 비용법 제도적인문제법률제정에긴시간소요 58) OECD ITF, Urban Mobility Systme Upgrade; How shared self-driving cars could change cty traffic, 2015
111 제 2 장자율주행자동차기술개발및현황분석 53 이러한예측은운송수단으로서의차량은카-셰어링 (Car-Sharing), 로봇택시 (Robot Taxi) 등의발전으로인한자동차판매감소를예측한것으로볼수있으며, 궁극적으로는스마트시티 (Smart City) 형태로진화될것 59) 이라는것을시사한다. 스마트시티란, 연결성 (Connectivity), 전력화 (Electrification), 자율주행 (Auto-driving) 등 3대축을토대로한스마트카를도시정부가통합운용하여, 교통사고와배기가스를줄이면서교통의흐름은빠르게함으로써, 도시를쾌적하고안전한스마트공간으로변화시킨다는구상 60) 이다. 미국연방교통부는전국도시를대상으로스마트시티프로젝트를공모하여, 2016년 7월오하이오콜럼버스시를대상도시로선정하였다. 오하이오주는 4,000만달러 ( 약 480억원 ) 의자금을지원받아스마트시티를구축할예정 61) 이다. 독일베를린 함부르크등지에서는스마트카셰어링제도를도입해도시교통수단에서친환경차비중을늘리기위한노력 62) 을하고있다. 59) Jeremy Hus, Obama s $4-Billion Self-Driving Car Plan is All about Laws and Testing, IEEE Spectrum, 접속 60) 이종혁, , 자동차 - 집통합솔루션잇달아... 스마트시티 구상빨라진다, 서울경제, 접속 61) US Dot, Smart City Challenge 홈페이지, 접속 62) 이호빈, , 거침없는성장세, 독일카셰어링산업의미래, KOTRA
112 54 제 3 절자율주행자동차기술과윤리 1. 운전프로세스의변화 (1) 운전자의운전프로세스 자동차의운전행위는주변환경을눈으로인지하고, 이를두뇌에서판단하 여, 차로와속도등을결정하는끊임없는피드백과정이다. < 그림 2-15> 운전자의운전프로세스 운전자는운행중차량의내부상황과, 외부주행도로에서발생하는상황을눈으로인지하게된다. 차량내부상황에는주행차량의속도, 연료상태, 실내온도및차량내부에서제공되는운전자편의사항들이포합된다고할수있다. 차량외부의환경은주행도로에서차선위치, 교통신호및표지판, 횡 / 종방향의주변차량의운행상황, 보행자및기타돌발상황들이될수있다. 운전자는이러한차량내부및외부상황을인지하여, 자신의안전을극대화하고, 원하는목적지에효율적으로도달할수있도록뇌에서판단을하게된다. 운전자의뇌는주변상황인지정보를뇌에서처리하고주행의사결정을하게되며, 결정된주행전략은사람의손과다리를이용해자동차의브레이크혹은핸들을조작함으로서기계에전달하고, 차량을제어하게된다. 이러한
113 제 2 장자율주행자동차기술개발및현황분석 55 개별적인차량의주행전략선택은거시적인시점에서교통류로수렴되며, 이 는다시개별운전자의의사결정요소로피드백되는일련의과정을목적지에 도착할때까지지속적으로수행하게된다. (2) 자율주행의운전프로세스자율주행의운전프로세스도이와유사한과정을통해진행된다고볼수있다. 그러나자율주행자동차운행프로세스의차이점은주변상황의인지는센서를통해하게되고상황판단은판단기에서, 그리고제어는엑츄에이터를통해이루어진다는점이라고할수있다. 자율주행은차량에장착된센서를통해도로와운행환경을인지혹은모니터링하고, 판단기를통해차선, 속도, 경로등을결정하게된다. 이러한과정을통해결정된판단은엑츄에이터와같은제어기에전달되고, 그결과로차량이제어된다. 자율주행시스템은이러한피드백과정을통해운전기능을수행하게된다. 현재의자율주행기술은차선을인식하고자기의위치를정확히인식하는데한계가있기때문에이를통해차량의거동을결정하는데불완전성이존재한다. 자율주행 3단계는부분적으로자율주행이가능한단계로, 자율주행모드주행중발생하는돌발상황에대응하기위한최종주행전략으로운행제어권을운전자에전환해주는것을택하고있다. 4단계에서는완전한자율주행이가능하며, 돌발상황에대응하기위한판단을시스템에서하게된다. 따라서차량자체에프로그램화된거동판단논리와절차, 처리시간등이사전에결정되어야한다. 자율주행자동차의판단논리와절차등을결정함에있어돌발상황하에서차량거동에윤리문제가수반되는사건이발생할수있음을고려해야한다. 자율주행의운전프로세스또한주변환경을끊임없이모니터링하고, 주변도로와교통상황에따라운전관련의사결정을하는학습이지속적으로이루어져야한다. 윤리에대한고려는자율주행의거동판단프로세스를프로그램화할때부터검토되어야하며, 여러판단기준에따라거동의안전성이확보될
114 56 수있도록설계되어야한다. < 그림 2-16> 자율주행시스템의운전프로세스 2. 자율주행기술단계와윤리 가. 자율주행기술단계별윤리역할의정도 자율주행이 2단계에서 3단계로발전해갈때제어범위, 자동화감지와대응능력, 운전자역할범위에큰변화가발생하고, 3단계에서 4, 5단계로변화될때또한운전자역할과운영범위의변화가크게발생한다. 자율주행단계별자동화범위, 자동화감지와대응능력, 운전자역할및자율주행운영범위를비교하면 < 표2-16> 과같다. 자동화제어범위를살펴보면 0단계에서는경고와지원, 1단계에서는횡방향혹은종방향의일방향제어가자동화되고있다. 그러나 2단계이상에서는종방향과횡방향의양방향모두의제어가자동화된다. 자동화감지와대응능력은 0-2단계까지는부분적으로기능하지만 3-5단계에서는완벽히기능하게된다. 운전자의역할을살펴보면, 0-2 단계까지는운전을직접하거나운행상황
115 제 2 장자율주행자동차기술개발및현황분석 57 을주시하는역할을하게되며, 3단계에서는돌발상황등의이유로시스템이작동하지않는구간에서차량의제어를담당하게된다. 또한 4-5단계에서는자동차주행이모두시스템에의하여이루어지기때문에운전자는불필요하게된다. 자율주행운행범위는 0-4단계까지는제한된구간내에서자율주행이가능하나 5단계에서의운영범위는무제한이될수있다. 자율주행에있어윤리의문제는 SAE 정의에따른자율주행 2단계부터발생한다. 그러나횡방향과종방향의제어가이루어지더라도자율주행 2단계에서는운전자가주변환경을모니터링하기위해지속적으로전방을주시해야하기때문에윤리의문제는크게부각되지않을수있다. < 표 2-16> 자율주행의단계별제어및운영범위비교 NHTSA 단계 SAE 단계 횡방향 자동화경고혹은제어범위혹은지원종방향 횡방향과종방향제어 제어 자동화감지와대응능력 부분적기능 완벽히기능 운전자역할 운전을직접하거나주시 시스템미작동시대응 시스템자동화시운전자불필요 운영범위제한적운영무제한 그러나자동화감지와대응능력이운전자보다는자동시스템에의존하는 3단계부터는운행구간에서발생하는모든상황을기계가판단하고차량거동의제어를수행하므로돌발상황에대응하기위한합리적인판단기준에따라대응하였는지가문제가될수있다. 자율주행의수준이높아질수록운전자의역할은낮아지고, 차량의자율주행범위와역할이커지게되며, 자율주행의수준이높아질수록기계의자율주행역할이높아지고, 윤리의문제도더높아지게된다. 자율주행 1단계에서시스템은운전자를지원하는수준이라고할수있으며,
116 58 자율주행을위한도로및교통시스템의역할은일반차량과동일하다. 따라서운행중에발생하는돌발상황에대한판단은운전자가전적으로책임을지게된다. 부분적자동화가적용된자율주행 2단계에서는교통시스템의기능은거의동일하지만, 차량의자동화기능향상을위한도로개선이이루어져야한다. 운행중에발생하는의사결정상황에대한판단도운전자가하게됨에따라윤리문제의책임은운전자에게귀속되며, 시스템의윤리는거의관련이없다. 자율주행 3단계는조건부자동화단계로긴급상황발생시에운전자가주행에대응하게되므로책임도운전자에게있게된다. 이에따라사고발생시사고발생의원인이차량, 동승한운전자, 도로혹은정보제공처에있는지책임을규명하기어려워진다. 자율주행운영구간에서도로관리자의도로정비와관리에대한책임이발생하고, 일부구간의특정조건에서도로, 차량, 교통정보제공으로자율주행의운행여건의지속적관리가필요하게된다. 돌발상황대응시운전자가일부윤리적책임을지게되며, 자율주행시스템은조건부자동화운전시윤리적책임이발생하게된다. 자율주행 4단계는높은수준의자동화단계이며, 차량과도로간통신용도로인프라의고도화와도로정비와책임이발생하게된다. 또한고수준자동화조건에서경로, 차선선택을위한도로, 교통, 기상상황등다양한정보를토대로차량이운행됨에따라책임도분산된다. 자율주행 4단계에서발생하는사고의윤리적책임중운전자의책임은최소화되고자율주행시스템의윤리적책임은커지며, 자율주행기술의완결성이중요해진다. 자율주행 5단계는완전자율주행단계로차량과도로간통신용도로인프라의고도화와도로정비의책임이발생한다. 또한완전자동화조건에서경로, 차선선택을위한도로, 교통, 기상상황등의정보를제공하게된다. 자율주행 5단계에서는운전자없이자율주행시스템이스스로운행하며, 돌발상황에대응해야하기때문에, 이에대한책임도전적으로자율주행시스템이지게된다.
117 제 2 장자율주행자동차기술개발및현황분석 59 자동차운행중윤리적딜레마상황은다양하게존재하며예상못한상황이발생할때문제가발생하게된다. 자율주행기술개발및상용화의장기로드맵을고려할때자율주행차량과비자율주행차량이혼재되어도로를이용함에따라복잡한교통상황이당분간존재할것으로예측되며, 복잡한상황에서사고발생가능, 도로운영문제가발생할수있다. 또한인프라측면에서, 자율주행자동차의운행에영향을미치는요소는도로, 교통, 기상, 조명, 통신, 포장상태, 운영조건등다양하다. 이렇게다양한도로운영조건에따라자율주행자동차의도로수용성차이가발생하게된다. 또한도로운영과교통체계수용성개선도필요하다. < 표 2-17> 자율주행의단계와윤리 수준 자율주행을위한도로, 교통시스템역할 윤리 수준 1 운전자지원 - 일반차량과동일 - 운전자가전적으로윤리적책임 수준 2 부분적자동화 - 차량의자동화기능향상을위한도로개선 - 교통시스템역할동일 - 운전자가대부분윤리적책임 - 시스템의윤리는거의관련없음 수준 3 조건부자동화 - 운영구간에서의도로정비와책임발생 - 일부구간의특정조건에서도로, 차량, 교통정보제공으로자율주행의효율성증대 - 운전자는돌발상황대응시윤리적책임 - 시스템은조건부자동화운전시윤리적책임발생 수준 4 고수준자동화 - 차량 - 도로간통신용도로인프라고도화, 도로정비와책임발생 - 고수준자동화조건에서경로, 차선선택을위한도로, 교통, 기상상황등제공 - 운전자의윤리적책임은최소화 - 시스템의윤리적책임은최대화 수준 5 완전자동화 - 차량 - 도로간통신용도로인프라고도화, 도로정비와책임발생 - 완전자동화조건에서경로, 차선선택을위한도로, 교통, 기상상황등제공 - 시스템이전적으로윤리적책임
118 60 나. 자율주행자동차관련인공지능기술과윤리 1) 자율주행관련인공지능기술인공지능은자율주행자동차의인지 ( 센서 ) 판단 자율제어등을담당하는핵심기술로, 도로의상황및운전자의운전습관까지도학습해여러상황에서도 ʻ인간처럼ʼ운전하도록설계하는것이다. SAE 기술수준 4~5단계에속하는자율주행자동차는시스템의자동차주행기능이큰기술로자동차기술에인공지능기술이접목되어구현되고있다. 인공지능기술은운전자와자동차간의상호교류를통해학습한운전자의취향이나습관등을바탕으로운전자맞춤형서비스의제공이가능하다. 또한도로운행중에발생하는다양한상황을학습하여자동차주행기술을스스로발전시켜위험상황에대처할수있다. 인공지능기술의개발과활용에있어가장핵심적인요소및자원은빅데이터라고할수있다. 인공지능알고리즘기술이적용된자율주행자동차는빅데이터자원을통해도로주행에필요한정보와대응방안을학습하며, 학습을통한결과는다시빅데이터에제공하게된다. 이러한인공지능의기술은데이터에의해좌우된다고할수있으며이에따라데이터의질적, 양적, 시간적, 공간적관리의중요성이확대되고있다. 자율주행기술에있어인공지능은자동차기술뿐만이아니라도로인프라기술에도접목이필요하다. 자동차기술의인공지능화란자동차시스템이인간과동일한운전기능을구현한다고할때현재도로상에서발생하는한계는지속적으로발생할수있기때문이다. 예를들어센서로감지할수없는원거리에서발생한사고상황이현재차량에영향을미칠것으로예상된다고가정해보자. 이사고상황에대해자동차스스로인지할수없는경우, 도로인프라에서정보를제공하여대응할수있다면현재차량은이에대비하여차량을운행할수있을것이다. < 표2-18> 은자율주행자동차의운행에필요한도로인프라와차량의정보를정리한것이다.
119 제 2 장자율주행자동차기술개발및현황분석 61 자율협력주행은차량의절대위치와도로상황등에대한동적정보를차량내에제공하는것이필수적이다. 차량내에서는도로상의동적 / 정적정보를취득하고처리하며주행을위한경로, 속도및기타사항들과같은의사결정에사용하게된다. 이러한의사결정을원활히수행하기위해서는인프라에서제공되는정보가상호융합하여표준화된방법으로차량에제공되어야한다. 또한자율주행차량이이들정보를활용함에있어서도어느정도표준화된방법을채택해야향후오작동및사고발생시책임소재등의확인을원활히지원할수있어자율협력주행기술의범용성및실용화를지원할수있다. 도로의정보를생성하기위한 V2X 기반도로센서융합, 고정밀측위기반전자지도구현, 원격도로교통관리시스템구축등을통해자동차가도로를스스로운행할수있는여건을마련하는것이필요 63) 하다. < 표 2-18> 자율주행자동차운행에필요한도로인프라정보와차량정보 구분 자동차에서필요한도로인프라정보 도로인프라에서자동차에제공하는정보 요구정보 실시간교통정보 : - 도로교통상황, 비상차량주행, 사고차량등정보 동적교통운영시스템 - 가변속도제한장치, 공사구간관리, 가변차로운영등 도로전자지도및도로기하구조정보체계 - 직선부 / 곡선부, 표지판위치, 고정밀기반전자지도등 물리적인프라관련 - 차로및차선, 도로표지, 도로경계, 노면마찰력, 도로파손등 Infra to Vehicle (I2V) 정보제공 - Digital Infrastructure 정보 - 도로구간정밀지도, 도로기하구조및노면상태속성 - 도로표지판 / 안전표지판 / 가변표지판내용 - 신호주기 / 현시 / 잔여녹색시간 교통운영및제어정보 - 자율주행구간 / 차로지정여부및설정변수 ( 속도, 차두시간등 ) - Traffic Mix ( 자율주행자동차 vs. 일반차 ) - 고속도로진입램프와교차로진입 63) 김규옥, 2015, 자동차와도로의자율협력주행을위한도로운영방안, 월간교통 vol. 213, p.24
120 62 구분 자동차에서도로인프라에제공해야하는정보 자동차간제공정보 요구정보 Vehicle to Infra (V2I) 정보 - 자율주행기능 (L2/L3) 정보 - ACC/CACC, LKAS, CIWS 등기능속성 - 차량상태, 센서 / 통신 / 전장기능상태진단 - 차량주행정보 - 속도, 가감속, 조향각, 측위, 상대위치 - 자율주행요청, 군집주행합류 / 이탈요청등 Vehicle to Vehicle (V2V) 정보 - 자율주행여부 - L2 혹은 L3 자율주행여부및자율주행 Parameter 값 - 차량주행거동역학 (Kinematics) - 속도, 가감속, 조향각, 측위, 상대위치 - Actuator 및 Braking Control 정보 자료 : 김규옥, 2015, 자동차와도로의자율협력주행을위한도로운형방안, 월간교통 vol. 213, p.25 2) 인공지능알고리즘인공지능기술은더욱활발히이용될것으로보인다. 그러나인공지능의기반기술인딥러닝알고리즘은예측과해석이불가능하며, 오류의감지나변별이불가능하여보정이곤란하다는특징을가지고있다. 인공지능에의한서비스이용시피해가발생하는경우, 특히예측가능성의범위를벗어나손해가발생한경우책임소재문제를야기할수있다. 또한인공지능에대한의존성이확대됨에따라자율주행자동차의안전에중요한영향을미치는다수의의사결정들이이미인공지능알고리즘에의해의존적으로이루어지고있다. 이러한현상은향후더욱확대될것으로예상되고있으며, 알고리즘에의한불합리한의사결정에대한우려도증가되고있다. 인공지능알고리즘의자율성이악용되거나특정이해집단에의해특정윤리기준이나판단기준이일방적으로강요되는경우에도사회적으로중대한문제가발생할수있다는우려가지적된다. 그러나현재상기의알고리즘문제를다루는법제나정책은부재하며, 인공지능에의해피해가발생할경우책임소재의불명확성에따른손해보전이나
121 제 2 장자율주행자동차기술개발및현황분석 63 권리구제의어려움이지적되고있다. 현상태에서는법적책임소재가명확하지않기때문에기술개발은무리없이계속될것으로예상된다. 그러나아직까지기술의안전성이확보되지않은상황에서법적책임소재가정해진다면향후기술개발비용이증가하고그에따라관련제품이나서비스의시장가격이높아질수있기때문에기술개발이더뎌질것이라는시각도존재한다. 나. 개인정보보호와윤리알고리즘 1) 개인정보인공지능기술의발전에따라개인맞춤형제품과서비스를제공할수있게되고, 더욱이개인에대한프로파일링이가능해짐에따라개인정보의침해가우려가확대된다. 인공지능기반기술인딥러닝기술은이미지, 대화인식및자연어처리가가능하고, 앞으로개인의행위, 감정, 욕구등을분석할수있는프로파일링기능도고도화될것이다. 현재인공지능기술을이용한사생활침해우려를사전에예방하기위한제도적수단이사실상존재하지않으며, 사생활침해에의해손해가발생한경우에도책임주체를명확히특정할수없거나인과관계및손해의입증이어려워권리구제가쉽지않을것으로예상된다. 2) 윤리인공지능은두가지측면에서윤리에대한고려가필요한데, 하나는인공지능알고리즘에윤리적판단기준을적용하여야하는경우이고다른하나는인공지능의규제수단으로윤리기준을활용하는경우이다. 이와관련하여가장유명한사례로자율주행자동차의윤리적딜레마상황을들수있다. ʻWhy Self-Driving Cars Must Be Programmed to Killʼ 이라는제목의 MIT 테크놀로지리뷰의한기사 ( ) 는 ʻ돌발상황이발생하면자율주행
122 64 자동차의인공지능은보행자를칠것인가아니면핸들을벽쪽으로꺾어차주인을희생할것인가? 이런윤리적문제해결에무인자동차의미래가달렸다ʼ 는내용의윤리적딜레마상황을설명하며 ʻ누가주인을희생시키는자동차를살것인가ʼ라고문제를제기하였다. 인공지능기술의발전속도, 내용, 방향, 부작용등을모두예측하는것은불가능하여법으로써모든것을예상하여대응하거나해결할수없으므로법의대안내지보수단으로윤리적접근법이필요하다.
123 65 제 3 장자율주행자동차윤리와책임문제 제 1 절자율주행자동차의윤리개념 1. 자율주행자동차의윤리및법적책임선행연구 자율주행자동차의등장과도로운행가능성이높아짐에따라자율주행자동차의윤리에대한관심과논의가활발히이루어지고있다. 자율주행자동차를인간의이동성을돕는로봇의일종이라고본다면, 자율주행자동차의윤리는로봇윤리의담론에포함시켜 64) 논의할수있다. 자율주행자동차의윤리에대한논의는향후시장에나오게될완전자율주행자동차가직면하게될극단적사고상황에서어떠한선택을해야하는가와피치못할사고발생시그책임의주체는누구인가에대한의문에서시작되었다고할수있다. 이러한논의는전통적인트롤리딜레마문제와유사하다. 극단적인사고상황에직면하였을때인간은어떤선택을할것인가에대한철학적, 윤리적, 심리적고찰을통해인간내면의모습을조명하는것이인문학및사회과학에서바라보는트롤리딜레마문제라고할수있다. 이에따라트롤리딜레마에대한논의는어떤선택을하는것이적합하다는결론을내리기위한것이라기보 64) Noah Goodall, 2014, Ethical Decision Making During Automated Vehicle Clashes, TRB 58, 61
124 66 다는트롤리딜레마문제를통해인간본성에대한철학적, 심리적사고의논의를시작하기위해주로인용되고있다 65) 고볼수있다. 그러나자율주행자동차의윤리문제는다소현실적인합일점이필요한논의가되어야한다. 이는자동차제작사들이자율주행자동차를시장에서판매하기이전이러한극단적인상황에서안전하게차량거동을결정할때기준이될수있는기본적인방안을마련할필요가있기때문이다. 자율주행자동차가이러한극단적인상황에대비해야한다는것을아이모프는그의소설 Liar 66) 에서잘보여주고있다. 아시모프의로봇 3원칙 67) 에따라행동하던주인공로봇은딜레마상황에서스스로의기능을정지시키고파멸되었다. 그러나시속 100km로주행하던자율주행자동차가트롤리와같은딜레마상황에직면했을때기능을갑자기멈춘다고한다면, 보다더큰혼란에빠지게될것이다. 이에따라딜레마상황에서인명피해를발생시킬수있는자율주행자동차의개발에있어윤리적고민과사고상황에어떻게대응해야하는지사회적합의를도출하고, 그에따라윤리알고리즘을개발할필요가있다. 자율주행자동차개발지원의가장큰당위성은인적요소로인해발생할수있는사고위험을현저히감소시킬수있다는것이다. 그러나높은기술수준의자율주행자동차보급이이루어지기전까지인간운전자와도로를혼용하는상황이발생할것이며, 상호통신혼선으로인한새로운사고위험이발생할수있으며, 이에따른책임문제를정리할필요가있다. 65) David Edmonds, 2014, Would You Kill the Fat Man?, Princeton University Press 66) Lair!, 위키피디아 < 접속 67) 아시모프의로봇 3 원식은다음과같다. 제 0 법칙 : 로봇은인류를해치거나혹은부작위를통해인류를위험에처하게해서는안된다. 제 1 법칙 : 로봇은인간을해치거나혹은부작위를통해인간을위험에처하게해서는안된다. 단이러한법칙이제 0 법칙을위반하는경우에는그러지아니하다. 제 2 법칙 : 로봇은인간이내린명령이제 0 법칙혹은제 1 법칙과충돌하지않는한그명령에복종해야한다. 제 3 법칙 : 로봇은자신의존재의보호가제 0 법칙, 제 1 법칙혹은제 2 법칙과상충되지않는한자신의존재를보호해야한다.
125 제 3 장자율주행자동차윤리와책임문제 67 본장에서는극단적인사고상황에서자율주행자동차의거동결정알고리 즘의기준을설정하기위한자율주행자동차의윤리를정의하고그에따른법 적책임문제에대해고민해보고자한다. 가. 자율주행자동차의윤리와법적책임 최근자율주행자동차의윤리문제와법적책임에대해상당히많은연구가진행되고있다. Gurney(2016) 은 68) 자율주행자동차충돌최적화알고리즘을윤리와법이라는두가지관점에서고찰하였다. Gurney 는자율주행자동차가직면할수있는다양한도덕적딜레마상황을예시하고, 윤리철학의논의방법이어떻게딜레마상황의의사결정사고에적용될수있으며, 그에따라어떻게다른결론을내릴수있는지보여주었다. 나아가자율주행자동차와관련된다양한법적책임을논의하고자율주행자동차최적충돌알고리즘을개발하기위한새로운법체계를제시하였다. Gurney 는윤리혹은도덕철학을논의하는방법을 Top-down 방식과 Bottom-up 방식으로설명하고있다. Top-down 방식은규범적인윤리이론을로봇혹은자율주행자동차에적용하여따르도록하는방식이다. 아시모프의로봇 3원칙, 공리주의윤리설 (Utilitarianism), 칸트주의 (Kantianism), 윤리적이기론 (egoism), 선 (virtue) 그리고십계명등이이러한방식에해당된다. Bottom-up 방식은머신러닝의방법으로로봇이학습에의하여도덕적으로바른행위를했을때이에대한인센티브를제공하여강화하는방식으로학습해가는과정에서윤리적기준이형성된다는논리이다. 이러한방식은어린아이가성장하면서점차도덕적가치를학습해나가는과정과유사하다고할수있다. 이러한방식의알고리즘개발은최근 AI 기술과접목하여개발되고있으나아직초기단계인것으로판단된다. Gurney 는자율주행자동차와관련된규범적윤리중대표적인공리주의와 68) Jeffery K. Gurney, Crashing into the Unknown; an Examination of Crash-Optimization Algorithms through the Two Lanes of Ethics and Law, Albany Law Review, p
126 68 칸트주의를바탕으로예시된자율주행자동차윤리를논의하였다. 공리주의는결과론적원칙과공익적원칙의두가지원칙이있으며, 이에따라행위공리주의와규범공리주의가있다. 행위공리주의는어떠한행위의결과가최대다수의편의를증가시켰다면옳은행위였다고보는것이다. 반면, 규범공리주의는어떤행위가공리를추구하고사회적으로합의된규범을따른행위였다면옳은행위로보는것을의미한다. 따라서이두가지공리주의는모두최대다수의행복을추구하는것이나행위공리주의는개인의행위에중심이있다고한다면, 규범공리주의는사회적으로합당한행위에중심이있다고볼수있다. 따라서행위공리주의에입각하여자율주행자동차의딜레마를분석한다면, 컴퓨터시스템은인간의두뇌보다더빨리계산을할수있기때문에사고상황에직면하였을때개입된개별적인참여자의편익을더빠르고정확하게계산하여선택을지원할수있다. 칸트주의윤리는어떤행위의정당성을의미혹은의무에서찾고있다. 칸트주의에서는어떤행위의결과보다는동기에무게를두고있다. 따라서어떤행위의동기가좋은의도이었다고한다면, 그결과가나쁘더라도, 그행위는정당화될수있다는것이다. Gurney 는트롤리문제를공리주의와칸트주의에입각하여설명하고있다. 트롤리문제를공리주의와칸트주의에입각하여분석하면서로다른사고의방식으로같은결론에도달한다는것을알수있다. 한사람과다섯사람을선택해야하는문제에서, 공리주의는결과적으로다섯사람을살리는선택은한사람보다는다섯사람의편익을도모하는선택이기때문에정당한것으로평가한다. 반면, 칸트주의에입각하여이문제를바라보면, 자율주행자동차는한사람을희생하는것을의도하지않고, 단지다섯사람의생명을구하는것을의도하였기때문에그행위는정의로운행위이며, 그과정에서한사람의생명이희생된것은좋은의도로다섯사람을살리기위한행위이기때문에어쩔수없는결과라고해석될수있다고하였다. 나아가 Gurney 는자율주행자동차의사고발생의법적해석에관한논의를
127 제 3 장자율주행자동차윤리와책임문제 69 하고있다. 사고발생으로인한민법및형사법적해석과제조자책임법에관한논의를하고안전도가높은자동차와그렇지않은자동차중하나를선택하는알고리즘을적용했을때적용될수있는법적책임을자율주행자동차제작자측면, 소유자측면, 이용자측면, 그리고정부측면에서다양하게검토하고있다. 마지막으로자율주행자동차의최적충돌알고리즘은자율주행자동차개발자, 철학자, 법조인, 정부및국민이함께고민해야할사안이라고결론을내리고있다. 나. 자율주행자동차의계약법적지위와책임 이상용 (2016) 69) 은자율주행자동차와같은인공지능을의식이있는법적주체라기보다는인간의특정행위를대행하는대리인 (Agent) 으로보고, 대리인의행위에대한법적책임배분을계약법적견지에서고찰하였다. 이상용은인공지능의법적책임적용문제를고민하기위하여세가지접근방법을제시하였다. 첫째는인공지능을하나의도구로보는것으로인공지능에의해체결된계약관계는단순히이용자의행위를전적으로대리하는것으로그행위로인해발생한책임문제는이용자가모두감수하게되는것이다. 현재상용화된자율기능을탑재한자동차의경우이용자가주행에따른책임을감수한다는것과어느정도맥을같이한다고할수있다. 둘째는단순도구가아닌중간대리인 (agent) 로보는것이다. 이에따라인공지능이대리인으로써권한을부여받은특정범위내의행위를하였다면, 이용자는이에대한책임을지게된다. 2-3 단계기술수준의자율주행자동차의경우특정조건하에서운전자가원하는구간동안자율주행모드로운행하게되면, 자율주행모드에서허용하는주행이외의사건 (event) 이발생한경우자율주행운행제어권은운전자에게전환되며, 그에따른책임역시운전자에게전환되는것과같다고볼수있다. 69) 이상용, 2016, 인공지능과계약법 : 인공에이전트에의한계약과사적자치의원칙, 비교사법제 23 권 4 호 ( 통권 75 호 ) pp.1639.~1700.
128 70 대리인으로서인공지능의행위는어느정도의자율성은보장하지만그행위의목적은이용자를대리하는것으로이용자와차량이외의도로이용자간에분쟁이발생할경우, 이를해소하기위한장치로해석될수있다. 마지막으로인공지능자체를법적인격체로보는것으로법적책임을인공지능이지게되는것이다. 그러나인공지능을법적인격으로간주할수있을정도로기술이발전하기에는아직소원한것으로비현실적이라는견해가많다고보고있다. 이어서이상용 (2016) 은인공지능이행한결과로체결된계약의법적책임은이용자에게귀속되며, 그에대한근거로현재의인공지능기술과법체계에서인공지능에법적인격을부여하는것을인정하고있지않는다는것을제시하였다. 이에대한근거로이용자를대리하는법적대리인의인격을부여하여이용자의행위를대리하기위해제3자에게이를확인시킬수있도록증명해보여야하는불편과부수적인비용이발생하기때문인것으로설명하고있다. 또한법인격이없는대리인의지위를인정하는것은무의미하며, 현재의대리법리상으로법인격이있을것을법리요건으로보고있기때문에불가한것으로설명하고있다. 이에따라이상용 (2016) 은인공지능대리인을통한계약에있어그책임은이용자에게귀속되고, 인공지능대리인은이용자의의사표시를보조하는도구로보았다. 이러한견해는현재시험운행가능한자율주행자동차의자율성이인정되지않기때문에이용자의이동을보조하는도구로볼수있으며, 자율주행자동차의사고책임은이용자에게귀속된다는입장과같다고볼수있다. 마지막으로인공지능대리인이자기권한내에서이루어진의사표시나계약체결의내용이이용자의의사에반할경우그책임배분을논의하였다. 이경우이용자의의사에반하는의사표시혹은계약체결을할수있는위험을설정오류, 추론오류, 오작동오류로유형화 70) 할수있으며, 위험배분의기준은법경제학적이론을바탕으로최소비용으로위험을회피할수있는자에게 70) Chopra and White, Artificial Agents and the Contracting Problem: a solution via an agency analysis, Jurnal of Law, Technology & Policy, pp , 이상용 (2016) 에서재인용
129 제 3 장자율주행자동차윤리와책임문제 71 배분하는것이효율적이라는견해를제안하였다. 설정오류는이용자가설정하는규칙에의해발생한위험으로이용자에게그행위에대한책임이있는것으로볼수있다. 오작동과추론오류의경우오류의발생원인을규명하기어렵고, 특히이용자보다는제작자혹은운영자측이오류발생원인을파악할수있는확률이높아적은비용으로위험을회피할수있기때문에더높은책임을배분해야한다는것이다. 자율주행자동차운영시발생할수있는위험에서도유사한결론을도출할수있다. 설정오류의경우는자율주행자동차이용자가차량의이용을부주의하게했기때문에주의를기울이는것만으로위험을회피할수있다고볼수있다. 반면추론오류및오작동오류의경우제작사와서비스운영자측에서더많은정보를가지고있어위험회피비용이더적게발생할수있을것이기때문에더높은책임을배분해야한다는것으로해석할수있다. 다. 자율주행자동차의보험책임배분 Schroll(2015) 는 71) 자율주행자동차의사고발생에대비하여공공성격의자동차보험제도를구축하여위험을분배할수있는보험제도를제안하였다. Schroll(2015) 은자동차사고와관련된보험제도를자가용자동차보험과공유자동차보험의특징에중점을두어설명하고, 공유및대중교통으로이용될수있는자율주행자동차의보험제도에영향을미칠수있는시사점을도출하였다. Schroll 에의하면, 현재자동차보험사고의책임은운전자에게큰부분이배분되고있는데, 자율주행자동차의도입에따라운전자에대한개념이모호해질것이기때문에이에대한논의가우선되어야한다고하였다. 또한이용자보다더많은정보를가지고있는공유자율주행자동차운영자와자율주행자동차제작사에대한보험책임을배분해야한다고하였다. 이에따라저자는자율주행자동차운영자, 탑승자및제조자가보험사고에 71) Carrie Schroll, 2015, Splitting the Bill; Creating a National Car Insurance Fund to Pay for Accidents in Autonomous Vehicles, U.S.A. vol 109, no. 3, p
130 72 대한책임을분배할수있는새로운시스템을제안하고있다. 본제도는미연방정부에서국가자동차보험펀드를운영하며, 공유자동차운영자, 자동차이용자및자동차제작사에서보험금을납부하여사고위험을담보하도록하는제도이다. 라. 선행연구의시사점 최근활발히진행되고있는자율주행자동차윤리와책임에관한선행연구의공통점은현재혹은가까운미래에실현가능한기술수준의자율주행자동차의자율성정도는완벽하지않다는것에동의하고있다. 또한극단적인위기상황에대응하여자율주행자동차가안전한거동을결정할수있도록사전적인대응방안을마련하고, 그에따른법적책임과위험회피수단을마련해야한다는것에동의하고있다. Gurney(2016) 은자율주행자동차의윤리문제는자율주행자동차가운행중트롤리딜레마와같은상황을마주하게되었을때차량거동을결정할수있도록대응알고리즘개발이필요하며, 이를위하여윤리철학적인고찰과더불어사고발생시의책임을민법, 형사법및제조물책임법으로설명하였다. 한편, 이상용 (2016) 은인공지능에대해법인격을부여하기보다는이용자를대신하여주어진역할범위내에서이용자를대리하는대리인으로보고계약법의관점에서인공지능의법적책임배분방안을논의하였다. 마지막으로 Schroll(2015) 은자율주행자동차가제공할수있는다양한교통서비스를고려하여향후사고위험을회피하기위한새로운보험제도를제안하였다. 자율주행자동차의책임에대한계약법적검토와보험제도검토결과자율주행자동차의사고위험에대한정보는이용자보다는제작사와교통서비스제공자에게더많기때문에이를효과적으로회피할수있을것으로보고있다.
131 제 3 장자율주행자동차윤리와책임문제 자율주행자동차윤리의개념 가. 인공지능로봇으로서의자율주행자동차 앞에서설명한바와같이 SAE에서는자율주행자동차를적용기술의수준에따라 0 5 단계로구분하였다. 기술단계 0 2 까지는인간에의한운행이이루어지고, 기술단계 3은운전자에서시스템으로전환되는단계이다. 로봇으로서정의될가능성이있는자율주행자동차는기술단계 4 5 이상의자율주행자동차로볼수있다. 기술수준 4 5단계의자율주행자동차는인공지능알고리즘기술과다양한센서기술을융합하여 목표지점이설정되면인위적인추가조작없이스스로주행환경을인식하면서목표지점까지자율적으로운행하는자동차 72) 라고정의할수있다. 이러한자율주행자동차는자동차로서의역할을수행함에있어스스로수행한다는특징이존재한다는사실을기반으로물건으로서 자동차 로인식될수있는동시에행위주체로서 자율성 을가진 로봇 으로인식될가능성이있다. 자율주행자동차의윤리를고려할때인간을윤리적주체로보고자율주행자동차 ( 로봇 ) 를윤리적객체로보는입장과자율주행자동차를인간처럼자율성을갖는윤리적주체로보는경우가있다. 전자는자율주행자동차를설계, 제조, 사용하는인간의윤리즉공학윤리를의미하고, 후자는자율주행자동차를윤리의판단과책임의주체로서의윤리를의미 73) 한다고할수있다. 그러나현재기술수준을고려할때, 자율주행자동차의윤리라는용어는자율주행자동차를다루는 인간의윤리 로정의하는것이현실적으로타당하다. 자율주행자동차는현상적차원에서운행의목적상부분적으로주변운행환경을인식하고운행에관한판단능력을갖기때문에자율적인것처럼행동할 72) 이중기, 2016, 자율주행자동차 : 로봇으로서의윤리와법적문제, 국토연구원, p.38 73) 이중기, 2016, 자율주행자동차 : 로봇으로서의윤리와법적문제, 국토연구원, p.39
132 74 수있으며, 운행목적상자율적주체의성격을가진다고할수있다. 그러나현재수준의자율주행자동차는인간수준의가치지향적인인식활동능력을갖지못하므로도덕적판단의주체가되지못한다. 따라서자율주행자동차의윤리는자율기능을가진로봇으로서이를설계, 제조, 사용하는공학자들의윤리로정의해야할것이다. 또한로봇을자율성을가진윤리적주체로보기위해서는도덕적판단주체가되기위한능력을갖추어야한다. 고도의인공지능을갖는로봇이 반성적결단 (reflective decision) 의능력을갖게되면도덕적주체로서의지위를인정할수있다는견해가있다. 74) 자율성이없이는도덕적주체일수없고, 자율성은주어진것의의미를자신의입장에서파악하고, 자유의지에따라스스로의행위를제어할수있어야한다. 이에따라로봇이주어진것의의미를파악할수있다면, 반성적결단을할수있기때문에도덕적주체가될수있다. 또한인공지능이객관적으로주어진데이터를처리하고, 그것을해석하여 정보 를생성하고, 정보의소통맥락에따른다양한사회적의미를 인식 할수있다면도덕적주체가될수있다. 즉학습에의한인식능력이가능하다면, 도덕적주체가될수있을것이다. 그러나현재기술수준의자율주행자동차는 ' 현상적차원 ' 에서 운행의목적상 부분적으로주변운행환경을인식하고운행에관한판단능력을가지므로자율적주체인것처럼행동할수있다. 따라서 운행목적상 자율주행자동차의자율적주체성을인정할수있다. 또한운행목적상의자율적주체성을인정할수있다면, 자율주행자동차를이용자 ( 운전자 ) 를대신하는대리인 75) 의자격을부여할수있다. 74) Spennemann (2007) / 고인석 (2011) 113 면 )- 논거와기준 75) 이상용, 2016, 인공지능과계약법 : 인공에이전트에의한계약과사적자치의원칙, 비교사법제 23 권 4 호 ( 통권 75 호 ) pp.1639.~ 1700.
133 제 3 장자율주행자동차윤리와책임문제 75 나. 자율주행자동차의윤리기준 앞서살펴본것처럼, 자율주행자동차는 ' 현상적차원 ' 에서 운행의목적상 부분적으로자율적주체인것처럼행동할수있으므로, 그목적상자율적주체성을인정할수도있지만, 기본적으로윤리의객체이고, 운행과관련된윤리적문제는윤리주체인 인간 의문제가된다. 따라서자율주행자동차운행과관련된윤리적명령은인간에대하여, 인간이어떻게자율주행자동차를설계, 제조, 사용할것인가에대한윤리적문제를다루는것이될수있다. 자율주행자동차가인간을대신하여스스로운행함에있어자율주행자동차는운행환경을인식하고운행제어결정을내리는데, 통상그운행결정이윤리적판단문제를요하는경우는거의없다. 예를들면, 앞차가서거나혹은빨간불이켜지면정지하는일, 목표지점까지갈때가장가까운거리를계산하여경로를판단하는일등은통상윤리적판단을요하지않는다. 그러나아무리기술적으로진보하더라도기후 환경적요인및기타요인으로인해예상하지못한사고상황이발생할수있고, 이경우예외적으로윤리적판단이필요한경우가발생한다. 이때자율주행자동차가윤리적판단을내릴때어떤기준에의하여윤리적판단을내리도록할것인가가문제이다. 인간의행위에대한윤리적판단기준에는의무론적윤리설, 공리주의윤리설, 플라톤의윤리설이대표적이다. 이러한윤리설은자율주행자동차의운행판단기준을설정하는데적용될수있으므로, 각윤리설에대해살펴보고, 자율주행자동차를이러한윤리적기준으로프로그램할경우의문제점에대해살펴보고자한다. 1) 의무론적윤리설과문제점의무론적윤리설은정당성의판단기준으로행위의 결과 를배제하고행위의 동기 와의무를기준 76) 으로삼는다. 칸트의철학사상이가장대표적인것이라고할수있다. 칸트가의미하는의무는 아무런경향성없이오로지의무
134 76 에서그행위를할때, 그때그행위는비로소진정한도덕적가치를갖는다 고하였다. 또한 유용성이나무익함이니하는것은선의지에아무것도증감시킬수없다. 고하여결과적유용성은배제하고선의지, 동기만이중요하다고보고있다. 그러나이러한윤리기준은상충하는두가지의무중하나를선택해야할경우어려움에빠질수있다. 예를들면, 자신의노예를살해한아버지를고발하는경우, 아버지를고발하는행위는아무런경향성없이객관적의무 ( 법적의무 ) 를따르고있지만, 사회적으로윤리적인행위인지는의문이있다. 왜냐하면자식으로서아버지에대한의무도존재하기때문이다. 살인자에게쫓기는친구가살기위해거짓말을해달라고부탁하는경우, 이때거짓말을하지않으면, 거짓말을하지말라는작은의무를지키기위해살인을방조하게된다면, 이러한행위가윤리적인지의문이된다. 이와같이의무론적윤리설은상충하는두가지의무를선택하여야하는경우무엇을선택해야하는지에대한해답을주지못한다. 따라서자율주행자동차를의무론적윤리설을기준으로프로그램할경우, 이러한문제를해결하기위해상충하는의무간의순위를정하거나, 혹은예외적인일정한경우많은사람의수요가있는경우가적은수요보다우선한다는공리주의와같은기준을채택해프로그램할필요가있다. 특히어떤이유로비상상황이발생하여자동차충돌사고를회피할수없고, 운행자의사망을야기하거나아니면보행자의사망을야기하는둘중의하나의선택을해야하는경우에있어, 의무론적윤리설에의하면, 자율주행자동차가어떠한선택을하는것도허용할수없게된다. 왜냐하면, 어떠한선택도어느의무를위반하기때문이다. 따라서사전에충돌사고기타비상사태에대비한윤리적선택의순서를판정해야하고, 그에따라프로그램을보정할필요가있게된다. 76) 이중기, 2016, 자율주행자동차 : 로보으로서의윤리와법적문제, 국토연구원, p.40
135 제 3 장자율주행자동차윤리와책임문제 77 2) 결과론적 ( 공리주의 ) 윤리설과문제점공리주의윤리설은정당성의판단기준으로행위의 동기 를배제하고행위의 결과 와효용을기준 77) 으로삼는다. 최대행복의원리가목적이되고, 다른모든윤리적가치들은최대행복에기여할때의미를가진다. 그러나쾌락의종류는다양하고, 양적측면에서도강도나지속성이다르며, 질적측면에서도층위가다양하므로, 최대행복의도출방식을정립하는데어려움이있다. 결과론적윤리설에의해자율주행자동차를프로그램할경우한가지단점은효용성을그기준으로삼기때문에사회전체적효용성은높아지겠지만, 타인의더큰행복을위해자동차소유자의행복이희생될것을요구한다는점이다. 따라서이런경우자기희생이강요되는데, 이러한결과는상식과부합하지않고자율주행자동차의구매자로하여금자율주행자동차의구입을저해하는요인으로작용한다. 특히어떤이유로비상상황이발생하여자동차충돌사고를회피할수없고소유자 1인의사망을야기하거나아니면행인 5인의사망을야기하는둘중의하나의선택을해야하는경우, 결과론적윤리설에의해프로그램되면, 자율주행자동차는소유자 1인보다는행인 5인을보호하기위한선택을할것이다. 그러나자동차소유자의희생을요구하는이러한결과는자동차소유자의제조업자에대한소송을야기할가능성을제공하며, 결국소유자및제조업자의이익에정면으로반하게된다. 마찬가지로, 자율주행자동차가선행하는두개의차중하나의차에충돌해야하는예외적인상황에서한차는안전도가높은차량이고, 다른한차는안전도가낮은차량인경우, 결과론적윤리설에의해프로그램되면자율주행자동차는최대의행복을실현하기위해안전도가높은차량을선택해충돌을할것이다. 그런데, 이러한결과는, 자신의안전을위해더많은투자를한차량소유자가충돌상황에서더큰위험에처해진다는결과가된다. 77) 이중기, 2016, 자율주행자동차 : 로봇으로서의윤리와법적문제, 국토연구원, p.40
136 78 3) 행위자중심윤리설과문제점의무론적윤리설이나공리주의윤리설은모두행위의정당성을정형화된 행위공식 혹은 행위법칙, 즉행위의동기혹은행위의결과를기준으로도출한다는점에서윤리적주체인 행위자 의입장은고려하지않는다 78). 그러나윤리적판단주체인행위자는실제의윤리적판단이필요한상황에서행위의동기와의무혹은결과와효용과같은하나의기준에따라자신의행동을선택하는것은아니다. 또한행위자인개개인의윤리적판단상황은복잡다기하기때문에어떤특정행위기준에의해판단의윤리성을확정하기는어렵기때문이다. 1 플라톤의윤리설플라톤은正義의규정 79) 등과관련해, 최선의것과올바른것을정확히반영하는영원히정당한행위공식혹은 윤리법칙 은세울수없다고보았다. 모든것은변화하기때문이며, 그결과, 덕스러운 행위자 의윤리적판단능력이중요해진다. 윤리공식은 일반적 인행위기준을설정할수있지만, 개별적인행위상황에서요구되는 구체적 행동이무엇인가에대해서는말하지못한다. 이를위해필요한것은 행위자 의윤리적통찰력이다. 이와같이법혹은정의로상징되는윤리법칙들은본질적으로구조적결함이있고, 개별상황에서가장잘판단할수있는윤리적행위자가법률에는없는윤리적애매성 ( 일반적행위기준 ) 의공백을메우게된다. 78) 이중기, 2016, 자율주행자동차 : 로봇으로서의윤리와법적문제, 국토연구원, p.40 79) 국가에는생산자, 수호자, 통치자세계급이존재하고, 이에알맞은절제, 용기및지혜의덕이있다. 각자가각자의역할을하면, 국가는正義롭다. 각자가각자의역할을다한다 는正義의법칙에대해플라톤은 정확성에있어서부족한것같다 고말하고, 그런것들의척도가조금이나마실재에미치지못할경우전혀적절하지못하다고비판한다. 왜냐하면, 불완전한것은어떤것의척도도아니기때문이다
137 제 3 장자율주행자동차윤리와책임문제 79 2 아리스토텔레스의윤리설아리스토텔레스 80) 는인간이영위하는행위의궁극목적은 행복 이라보았고, 행복은고정된상태가아니라활동하는과정으로보았다. 또한행복은인간적기능, 즉이성과사유의기능을잘발휘하면서잘살아가는활동이고, 행복한생활은이성이발휘되는관조적인생활이라고보았다. 81) 이때, 인간의고유한기능인이성의기능을최고로발휘하게하는것이덕이다. 덕은이성이요구하는방식으로행동하게하는것이며, 중용에서성립되는행위선택의품성상태이다. 중용은행위자의특징에의해결정된다. 관조적생활, 즉이성의기능을발휘하게하는덕의예로는, 용기, 82) 절제, 83) 긍지 84) 친애등이있다. 따라서인간이외의동물들은이성의활동인관조의활동에참여하지못하므로, 행복하지않다고말했다. 행위자중심윤리설을기반으로자율주행자동차를프로그램할때의문제점은 행위기준 (moral code) 이아닌 행위자의특성 을기준으로하기때문에객관적으로프로그램하기힘들다는점이다. 예를들어, 행위자의윤리적판단능력, 혹은행위자의중용은행위자의특징에따라달라지기때문이다. 즉, 덕의예로들수있는, 침착함, 절제, 평안함등은자율주행자동차의운행에관련되므로프로그램할수있다면좋을것이나그방법에대한의문이남는다. 인공지능을활용한딥러닝기술이접목된자율주행자동차가개발된다면, 이용자의개인적특성을반영한자율주행자동차를개발할수도있겠지만, 자율주행자동차가인간의운행특성을그대로답습하는것이반듯이좋을해결방안인것만은아니다. 자율주행자동차는인간의불완전성에기인하여발생하는인적요소로인한사고를줄이고자개발되는것인데, 자율주행자동차가인 80) 인간의행위는목적과수단의체계이며, 행위에있어서궁극적목적이존재한다고보았다. 즉, 행위의궁극적목적인 최고선 이존재하며, 최고선에대한탐구가윤리학의과제라고보았다. 81) 행복은덕스러운활동이고, 인간안에있는이성이발휘되는관조적생활이다. 82) 비겁과만용 83) 쾌락과방종 84) 오만과비굴
138 80 간의운전행태를답습하거나어쩔수없는충돌위기상황에서인간과똑같이 무조건반사에따른위험회피행태를보인다고한다면, 자율주행자동차가가 지는장점이사라지게되기때문이다. 3) 자율주행자동차윤리기준자율주행자동차가실제로운행되면확률적으로낮지만윤리적판단이요구되는예외적상황이발생할수있다. 이러한상황에대한어떤윤리적판단이행해져야하는가에대해서는 다양한견해 가제시될수있고, 그타당성에대한 해답은하나이상이존재 하거나혹은 해결이상대적 일수있다. 따라서자율주행자동차의운행시윤리적판단이필요할경우자율주행자동차가어떻게행위할것인가를프로그램하는일은어떤 논리기준에의거한윤리적판단 의문제일수도있지만, 제조자가구체적문제에대한사회구성원에대해정보를제공하고소통을통해그문제에대한 다양한해결책 중어느해결책을선택할것인가에대한넓은공감대를형성하는해결방식이더타당해보인다. 현대사회는과학기술의혜택하에서살아간다. 과학기술은내재적인위험성을내포하고있으므로, 현대의 위험사회 에서는예외적이지만일정한위험의인수는필수적이된다. 그리고이러한예외적위험의인수는일정한한도에서사회가공동으로부담하는것이타당하다. 따라서자율주행자동차의운행이야기할수있는잠재적위험의대처방식은사전적으로예외적상황에대한윤리적타당성을검토하는것과아울러예상할수있는피해에대한공동기금의조성, 및위험사고에대한책임을확보할수있는법률적해결방식의정비등이요구된다.
139 제 3 장자율주행자동차윤리와책임문제 81 제 2 절자율주행자동차법적책임과보험 1. 자율주행자동차관련법제도현황 자율주행자동차가윤리와도덕적판단의주체로정의될수있을정도의자율성을갖지는못하지만, 운행목적상의자율성을가지고이용자 ( 운전자 ) 를대신하여행위 ( 주행 ) 하기때문에, 자율주행자동차를 대리인 으로써의자격을부여할수있다. 자율주행자동차가대리인으로사용자를대신하여행한행위의결과가이용자의의지에반하는경우법적책임과그에따른위험회피를위한보험책임배분기준을논의할필요가있다. 먼저, 자율주행자동차가도로를운행하기위한법제도, 사고발생에대비한법적책임과위험회피를위한보험제도에관한검토가선행되어야한다. 자율주행자동차의운행과관련된법령은 자동차관리법 과 도로교통법 이있고, 자동차사고책임에관한법령은 도로교통법, 자동차손해배상보장법, 교통사고처리특례법, 제조물책임법 과 민법 등이있다. 또한자동차사고위험을회피하기위한보험제도로는자동차보험요율제도, 자동차보험약관, 제조물배상책임보험및기타자동차보험등이있다. < 표 3-1> 자율주행과연관된기존법제도현황 법률 보험제도 비고 관련법령및제도 관련개선사항 자동차의운행 자동차관리법자율주행자동차안전기준등도로교통법운전자의정의 운전자의정의교통사고의처리자동차손해배상보장법자동차손해배상책임및손해배상교통사고처리특례법운전자의정의에따른처벌규정 교통사고책임 민법 ( 불법행위책임 ) 제조물책임법제조물책임의입증관련사항 자동차보험제도 자동차보험요율제도자동차보험약관 기타관련보험 제조물배상책임보험기타자동차보험등
140 82 자동차관리법 은자율주행자동차를정의하고, 임시운행을위한안전에관한사항을규정하고있다. 현행 자동차관리법 에서는자율주행자동차를운전자또는승객의조작없이스스로운행이가능한자동차로정의하고임시운행의허가를받을수있도록허용하고있다. 그러나자율주행자동차의안전기준및자기인증등에관한사항은연구개발을통해마련하고있는실정이고, 자율주행기술수준에따른정의와안전기준등에대한구체적이고심도있는고민이필요하다. 자동차가운전중법규위반및사고시형사사건과관련된법률에는 도로교통법 과 교통사고처리특례법 이해당되며, 자율주행자동차사고에도적용할수있다. 도로교통법 에서는 자동차관리법 의자동차정의를준용하고있으나, 자동차의운전자에대한정의를따로두고있지않다. 다만, 법제 2조에서는 운전 을도로에서차마를그본래의사용법에따라사용하는것 ( 조종을포함한다 ) 으로정의하고있다. 이에대해김정임 (2016) 85) 은본래의사용방법에대해구체적으로명시하고있지는않으나, 운전자가이동을목적으로조종하는행위로보아야한다고해석하고있다. 그러나일정수준이상의고도의자율주행자동차와완전자율주행자동차의경우운전자가이동을목적으로조정하고있지않지만자율주행자동차스스로이동목적을위해차량의조정을대리하도록하고있다고볼수있다. 이에따라 도로교통법 에서의미하는 운전 의정의에자율주행자동차의이동목적행위의대리에관한사항을포함할수있도록재정립할필요가있다. 교통사고처리특례법 은업무상과실또는중대한과실로교통사고를일으킨운전자에관한형사처벌등의특례를정함으로써교통사고로인한피해의신속한회복을촉진하고자하는것을목적으로하고있어교통사고로인한법적책임이 운전자 에게있음을명시하고있다. 그러나고도의자율주행자동차및완전자율주행자동차가사고의원인을제공한경우에대한형사처벌을어떻게할것인가를제시하지못하고있어 도로교통법 상의운전자에대한정의정립과더불어고민이필요하다. 85) 김정임, , 자율주행자동차운행에관한공법적고찰, 한국법학회 2016 년도한일추계국제학술대회발표자료, p.29-48
141 제 3 장자율주행자동차윤리와책임문제 83 민사책임과관련된법률에는 민법, 자동차손해배상보장법 및 제조물책임법 등이해당된다. 민법 제750조에서는고의또는과실로인한위법행위로타인에게손해를가한자는그손해를배상할책임이있도록규정하고있다. 이중 자동차손해배상보장법 은자동차의운행으로사람이사망또는부상하거나재물의멸실또는훼손도니경우손해배상을보장하는제도를확립하여피해자를보호하고자함을목적으로하고있다. 법제2조에서정의하는운행이란물건의운송여부와관계없이자동차를그용법에따라사용하거나관리하는것으로정의하여 도로교통법 의운전과유사하게정의하고있다. 법에서는 운전자 를다른사람을위하여자동차를운전하거나운전을보조하는일에종사하는자로정의하고, 법제3조에서는자동차손해배상책임의의무를자기를위하여자동차를운행하는자가그운행으로다른사람을사망하게하거나부상하게한경우로정의하고있다. 이러한규정은모두사람이운전자인것으로명시하고있어고도의자율주행과같은시스템주행중에발생한사고의경우그손해배상의책임주체를결정하기어려울수있다. 이에따라고도의자율주행자동차및완전자율주행자동차에적용하기위한개선이필요하다. 제조물책임법 은제조물의결함으로발생한손해에대한제조업자등의손해배상책임을규정하여피해자를보호하는것을목적으로하고있다. 제조물의결함으로생명, 신체또는재산에손해를입은자에게손해를배상해야하지만, 면책상유에해당하는경우손해배상을면할수있다는규정을두고있다. 그러나통상자동차사고발생시피해자가손해배상을받고자자동차의결함으로인한사고라는것을입증하는것은매우어려운일이다. 특히자율주행자동차의경우기계적인결함이외에소프트웨어에대한결함을입증해야하기때문에더욱어려울가능성이높다고할수있다. 마지막으로이들법률에서정한자율주행자동차의사고책임주체에따라피해자의경제적보상을현실화시킬수있는제도로써자동차보험및제조물배상책임보험등이있다.
142 84 2. 자율주행자동차의법적책임 현행법체계내에서자동차사고와관련된법적책임은사람을운전자로보고, 자동차의운전및운행중에발생한사고의과실책임을묻고, 그에따른손해배상을할수있도록하고있다. 그러나앞서살펴본바와같이고도의자율주행자동차및완전자율주행자동차의경우자동차시스템이 운전 의행위를수행하고있어사고책임의소재를파악하는것이매우어렵게될수있다. 자율주행자동차의사고발생시책임귀속을결정하기위해서는자율주행자동차의법인격을정의할필요가있다. 고도의자율주행자동차혹은완전자율주행자동차의소유자가개인이고, 소유자의이동목적을위해특정범위내에서자율적인주행제어판단을한다고한다면, 자율주행자동차는개인소유자의이동행위를대리한다고볼수있다. 한편, 공유혹은대중교통운영자가고도의 ( 완전 ) 자율주행자동차를소유하고, 공유혹은대중교통서비스를제공하기위하여이용자 ( 탑승자 ) 의이동을도모할목적으로사용된다고한다면, 자율주행자동차는공유혹은대중교통서비스이용자를대리하게된다. 이렇게소유자혹은교통서비스운영자를대리하게되는고도의자율주행자동차가야기한사고의법적책임은소유자혹은운영자에게귀속된다고할수있다. 그러나고도의자율주행자동차가운행중발생한사고의원인이단순히운영상의미숙이라고보기어렵다. 앞서설명한바와같이자율주행자동차의운영시스템은단순히기계적인설계와제작만으로끝나는것이아니라복잡한도로교통상황에따라운행중발생할수있는예기치못한상황을고려하여차량의거동을프로그램해야하며, 자동차제작자가고려하지못한미지의상황이발생하였을때의책임이자동차제작자에게귀속될것인지혹은단순히불행한사고로처리해야하는지모호할수있다. 자율주행자동차의운행과관련된법적문제가제기된다면그에대한손해배상책임과형사책임문제가제기된다. 따라서사고책임의귀속을보편적으로자동차의사용으로인해편익을얻는참여자에게감수하도록할수도있다.
143 제 3 장자율주행자동차윤리와책임문제 85 자동차제조자및운행자는자동차의판매혹은운행으로인하여이익을취하고있다. 따라서자동차의운행으로제3자에대한위험을야기한경우, 제3 자에대한위험과자신에게발생하는위험의크기가같은경우, 혹은어떤하나의위험의회피로서동등한사회적효용이달성되는경우에는위험을야기한수익자가위험을감수하도록, 자동차를설계, 제조, 사용해야할것이다. 이렇게자율주행자동차의운행시발생한사고에대하여자율주행자동차를운행함으로써편익을얻는당사자가사고의책임을감수해야한다고할수있다. 그러나앞서설명한바와같이자율주행자동차의사용으로편익을얻는사용자라고할지라도사고원인을직접적으로제공하지않은경우라고할경우, 그책임을감수하라고한다면너무가혹한결정이될수도있다. 자율주행자동차의운행과관련해제3자에대한손해가야기된경우, 자동차제조자, 소유자, 및이용자는자동차의판매혹은운행으로인하여이익을누리고있으므로, 발생한손해에대해서는각수익자가제조상결함혹은운행상결함으로인한것임을입증하지않는한, 공동으로손해배상책임을지도록할필요가있다. 공동손해배상책임에대해제조자와운행자사이의책임을어떻게분배하는가에대한문제는위험에대한공동의기금을설치하고, 각당사자의과실부분을판단함으로서책임을분배할수있을것이다. 그러나자율주행자동차가개입된사고발생시당사자의과실부분을판단하여책임을배분하는것은매우어려운일이될수있다. 특히시스템의결함으로인한사고의발생인가는피해를입은제 3자혹은소유자및운영자가파악하는데한계가있을수있다. 이러한시스템의결함은제작자편에서더많은정보를보유하고있으며, 이를회피할수있는가능성이더많을것으로판단된다. 따라서자율주행자동차사고책임배분에있어최소비용회피자의원칙 (the least-cost avoider principle) 의적용을검토할필요가있다.
144 86 제 3 절판단기준과법적책임기준의시사점 자율주행자동차의딜레마상황에대한사전적대응의일환으로윤리알고리즘의개발이필요하나딜레마상황에서의선택과그에따른예상결과를고려하여윤리적용기준을고민할필요가있다. 자율주행자동차의윤리판단기준은의무론적윤리, 공리주의적윤리, 플라톤적윤리를고려해볼수있다. 그러나개별윤리이론중어느하나를기준으로자율주행자동차의윤리알고리즘을개발하기에는딜레마상황을회피하는데어려움이발생한다. 자율주행자동차가개입된사고발생시현행재산법및자동차손해배상보장법체계를적용하기에는자율주행자동차특성이다소부적합한면이있어개선이필요하다. 자율주행자동차는운전자의전방주시의무가일반차량에비해현저히낮아질수있으며, 자율자동차의책임을묻기위해운전자의책임이없음을입증해야하는난제가발생한다. 자율주행자동차의사고발생원인은차량자체에만있는것이아니라, 차량과연계된통신과교통시스템이될수도있으며, 도로의유지관리불량으로발생할수도있다. 자율주행자동차관련사고책임을규명하는것은훨씬복잡하고, 책임규명에따라차량제작사, 차량운영사혹은소유자, 도로유지관리기관등의책임소재문제가향후주요쟁점으로부각될가능성이매우크다. 따라서자율주행자동차의윤리알고리즘개발에필요한자율주행자동차가개입된자동차사고에있어책임소재, 책임의정도및이를판단하는윤리기준을제시하기위한고민이필요하다.
145 87 제 4 장자율주행자동차윤리및운전자수용성조사 제 1 절자율주행자동차윤리개념과인식분석 1. 자율주행자동차윤리판단기준의필요성및사례분석 가. 자율주행자동차운행시윤리판단기준의필요성 자율주행자동차의기술수준에따른정의는 SAE 기술단계별정의로합의되어가는추세를보이고있다. 그러나법적책임해석을위한자율주행자동차의정의는아직까지유동적이라고할수있다. 자율주행자동차의법적책임에대한논의는철학및윤리적숙고와사회적합의가이루어진이후에가능할것으로판단된다. 자율주행자동차운행시발생할수있는윤리판단의문제는전통적인윤리딜레마로논의되고있는트롤리문제와같은철학적인고민을수반하고있다. 일반적으로운전자가불가피한상황에서자신을보호하기위하여행한행동은법적해석에있어정당방위가될수있다. 그렇기때문에자동차운행도중발생한교통사고에있어상호책임을묻고있는것이다. 자동차운행시발생하게되는딜레마상황에서인간의선택은언제나이성적이라고할수없다. 이는너무나갑작스러운사고발생에대해기술적으로대응할수있는시간을확보하는것이어렵거나, 개인적인선호가선택에작용하거나, 혹은인간의이기심이작용하기때문이라고할수있다.
146 88 자동차가도로운행중갑작스런보행자혹은동물의개입에운전자가대응하기에는시공간적인한계로사고를유발할수밖에없다. 또한사고발생시개인이가지고있는습관등에의해무의식적인행동이발현되거나개인의이익을최대화할수있는선택을할수있다. 이에따라현행법규범은사고발생시자연스러운정황적상황을고려하여책임을분할하고있다. 또한딜레마상황에서의선택이후책임의유무, 과실의경중, 고의성의유무에따른피해자구제제도가운용되고있다. 자율주행자동차가도로운행중직면하게될딜레마의사례도운전자운행시와유사할것이다. 자율주행자동차의정보인식, 판단및제어기능은인간의한계를능가할것으로보고있으나기술적인우월성으로극복할수없는딜레마상황은지속적으로발생할수있다. 소설 Round around 에서아시모프는로봇의 3원칙을설정하고프로그램된로봇에이원칙을적용하였을때의단점을보여주고 86) 있다. 또한그의소설 Liar 에등장하는 Herbie 라는로봇은소설에등장하는두사람의마음을읽는능력을보유한로봇으로둘의마음을다치지않도록서로가듣고싶은 거짓말 을하게되고, 둘의관계에서오해가깊어지자, 삼자대면을하게된다. 이상황에서 Herbie 는둘중한사람의마음도다치지않도록할수없다는것, 즉아시모프의제1원칙을위반할수밖에없다는것을깨달고, 스스로기능을정지하게된다 87). 이소설에서아시모프는프로그램된로봇이딜레마상황에빠질수밖에없다는것으로보여주고있다. 그런데, 만일자율주행자동차가딜레마상황, 즉논리적인계산에의한상황판단이불가한한계상황에서스스로기능을정지하게된다면, 어떠한일이발생하게될까? 도로위를달리던자동차가갑자기정지한다고했을때큰교통사고가발생하게될것이다. 따라서자율주행자동차가직면하게될딜레마상황에서판단할수있는알 86) Three Laws of Robotics, < 접속 87) Lair!, 위키피디아 < 접속
147 제 4 장자율주행자동차윤리및운전자수용성조사 89 고리즘의개발및적용을통해딜레마상황에서대응할수있도록대비할필요가있다. 사전적대응의일환으로딜레마상황에대비한자율주행자동차의최적거동알고리즘개발이필요하며, 최적화기준마련을위한사회적합의도필요하다. 나. 자율주행자동차운행시윤리딜레마사례 자율주행자동차가운행중직면한딜레마상황에서의의사결정최적화요소는생명의존엄, 자율주행자동차책임의최소화, 공익의최대화, 자율주행자동차피해의최소화로볼수있다. 인명피해최소화는선택의결과로서인명피해를최소화할수있는선택을유도하는것이다. 공공의편익최대화는선택의결과로서공공의편익을최대화할수있는선택을하는것으로직접적인피해대상자뿐만이아니라간접적편익 (Beneficial Externalities) 을고려한개념이라고할수있다. 자율주행자동차의책임최소화는수동적인선택알고리즘으로결과에대한책임을회피하는선택이라고할수있다. 공리주의윤리론은크게행위윤리와규범윤리로구분할수있다. 결과적공리주의는어떤행동의결과가개인의편익을가져왔다면정당한것으로보는입장인반면, 규범적공리주의는공공의편익이도출된다고보는규범을따른행위를정당한것으로보고있다. 칸트적윤리는행위의결과보다는동기를더중요하고보고있다. 이에따라어떤행위의동기가나쁘다면결과가좋았더라도이는정의롭지못한것으로보는반면, 동기가좋았다면, 결과가좋지않더라도정의로운것으로보고있다. 칸트의윤리에서는인간의존엄을우선으로두고있으며, 공리주의에서는공익을우선 88) 으로보고있다. 88) Jeffery K. Gurney, 2016, Crashing into the Unknown: an Examination of Crash-Optimization Algorithms Through the Two Lanes of Ethics and Law, Albany Law Review, Vol.79.1, p
148 90 자율주행자동차가운행시직면할수있는딜레마상황시나리오를인적피 해의정도와재물파손의정도를기준으로상정해 89) 볼수있다. 1) 인명피해의정도에따른시나리오자율주행중회피할수없는사고발생상황을인명피해정도에따라정의하였다. 이에따라대표적인딜레마시나리오를노인과어린이의선택, 1인과 10 인중선택, 자신과타인중어느쪽의희생을선택하는것이윤리적으로정당한가를고려해보았다. 현재도로교통운영시스템의기본전제는공리주의적윤리설이라고볼수있다. 앞서설명한바와같이공리주의는윤리적정당성의판단기준으로행위의동기를배제하고결과를기준으로삼아최대다수의최대행복을추구하는것을가치기준으로삼고있는윤리설이다. 따라서인명피해의정도에따른시나리오를분석함에있어공리주의적판단을했을경우이와대립하게될다른윤리적가치, 즉칸트의윤리와행위자중심의윤리와의관계를조명해보고자한다. 자동차가어린이와노인을마주하여피할수없는상황에직면하였을때양자의기대수명에따른미래효용을비교하여어린이의생명을존중하는쪽으로선택할경우노인의생명존엄에대한정당성이희생될수있다. 또한어린이의경우기대수명이높아미래가치가클수있으나, 노인의경우그사고상황에이르기전까지축적한경험과지식이사회에미치는가치또한클수있다. 이러한운전자의딜레마상황에서어떠한선택을하는것이윤리적으로정당한가에대한판단은매우어려울수있다. 또한자동차가마주하는보행자가 1인인경우와 10인인경우, 생명을비교하여공리주의에입각하여다수의생명을구하는방향의선택을한다고할때, 1인의희생이강요되는상황이발생할수있다. 이경우, 다수의이익을위하여 89) Patrick Lin(2016) 의자율주행자도차딜레마사례참조하여작성함

149 제 4 장자율주행자동차윤리및운전자수용성조사 91 1인의희생을강요하는것이바람직한선택인가에쉽게답할수없을것이다. 마찬가지로자동차가마주한보행자를희생하지않기위하여, 자기차량의피해가명확한혹은운전자의생명이희생되는선택을할수있는운전자는극히드물것으로판단된다. 또한타인이생존과자율주행자동차의파손및탑승자의인명피해를비교하여타인의생존을선택하여자율주행자동차의책임을회피한경우자율주행자동차소유자의희생을강요하는결과를초래할것이다. < 그림 4-1> 인명피해정도에따른시나리오 2) 역선택 (Adverse Selection) 문제발생시나리오역선택 (Adverse Selection) 의문제는공리주의적선택이오히려역선택의문제를초래할수있는선택이될수있다는것이다. 자율주행자동차가불가피한사고상황에서공리주의윤리론에따라인명피해를최소화하는선택을하였으나, 결과적으로다수의편익을최대화하지못하는결과를최래할수있다는것이다. 예를들면, 자율주행자동차가주행중불가피한상황에서마주오는두대의이륜자동차중공리주의적최선의선택의일환으로안전장구를잘착용하여상대적으로안전한이륜자동차와의충돌을선택하게될때, 이에따른통해발생하게될인명피해는최소화할수있다. 그러나향후자율주행자동차가
 문제발생시나리오 3) 충돌시피해의정도가불확실한경우의선택충돌로인한사고의피해정도는사고가발생한이후에실현된다. 사고발생바로직전까지, 운전자혹은자율주행자동차는정확한피해의정도는알수없고, 다만확률에따른예측을할수있는것이다.")
150 92 상대적으로안전한차량과충돌하도록프로그램된다면, 안전한차량을선택함으로써충돌상황시목표물이될수있는차량을구매혹은이용하고자하는수요가감소할수있다. 이는궁극적으로사회전반적으로안전한차량의감소에따른사고는더증가할수있다. 이는비단이륜자동차사례뿐만이아니라차량의크기에따른피해정도혹은충돌안전장치가많이설치된고가의차량과그렇지않은차량의사례에서도발생할수있는문제가될수있다. < 그림 4-2> 역선택 (Adverse Selection) 문제발생시나리오 3) 충돌시피해의정도가불확실한경우의선택충돌로인한사고의피해정도는사고가발생한이후에실현된다. 사고발생바로직전까지, 운전자혹은자율주행자동차는정확한피해의정도는알수없고, 다만확률에따른예측을할수있는것이다. 만일자율주행자동차가마주오는차량혹은보행자와자신의차량중하나를선택해야하는상황에직면했을때, 자율주행자동차의선택의결과가확률만제공하게된다고할때
151 제 4 장자율주행자동차윤리및운전자수용성조사 93 자율주행자동차의선택의윤리문제는더욱복잡해질수있다. 예를들어, 자율주행자동차가마주오는 1인이탐승한자동차와충돌상황에직면한경우를생각해보자. 이때자율주행자동차의선택은마주오는차량과충돌하거나혹은낭떠러지로떨어지는선택만을할수있다. 자율주행자동차가마주오는차량과의충돌을피하기위해낭떠러지로떨어져자율주행자동차의물적인적피해 100% 를발생시킬경우타인의인적물적피해는최소화하나, 자율주행자동차소유주의피해는 100% 발생시킬수있다. 반대로마주오는차량과충돌하여상대차량의 1인의피해는발생하나자율주행자동차의피해는최소화한경우타인과의충돌로인한피해에대한책임이발생한다. 자율주행자동차가다인승의차량, 예를들어어린이들이탑승한학교버스와충돌할위기에놓였다고할때, 자율주행자동차가충돌을회피하여낭떠러지로떨어지게되면인적 물적피해는 100% 가되고, 마주오는어린이들을보호하여사회적최선의선택을할수있다. 그런데, 마주오는학교버스와충돌할경우발생가능한피해의확률이 100% 이하의확률이라고한다면, 자율주행자동차의선택은사회적으로최적의선택이되지않을수도있다. 상대방차량과충돌하여단순히물적피해만발생하게될수있었는데, 자율주행자동차가이를예상하지못하고낭떠러지로떨어지는선택을하게된다면, 이는사회적으로최적의선택은아니라고할수있다. 한편, 마주오는다인승차량과충돌할경우피해확률이 100% 이상인경우, 자율주행자동차가낭떠러지로떨어지는선택을했다면, 이는사회적최선을위해개인을희생시키는선택이되며, 윤리적으로정당한가에대한의문이제기될수있다. 만일마주오는차량과충돌을선택했다면, 자율주행자동차는사고피해에대한책임이발생한다.

152 94 < 그림 4-3> 충돌시결과가불확실한상황시나리오 4) 도로교통인프라의윤리선택자율주행자동차상용화에따라도로교통인프라의역할이증대하고있으며, 3단계자율주행자동차상용화시도로인프라의윤리문제가발생할수있다. 도로인프라의관제수행에있어도로규정속도는유지하나주변교통류의인지부족으로교통류의흐름을저해하여결과적으로도로효율을떨어뜨리는자율주행자동차에대한윤리문제가발생할수있다. 또한자율주행자동차가교통류의흐름을따르도록할경우교통법규를위반하도록강요하게되나종합적인도로효율상승으로다수의행복이커질수있다. 반대로자율주행자동차가교통법규를준수하도록하게될경우, 교통법규의위반을강요하지는않으나도로효율악화로다수의피해를유발할수있다. 결과적공리주의에따르면, 다른피해가없다는가정하에도로교통법규위반으로행위자와주변의교통흐름에편익을주었다면, 이때의위반은이해될수있는것으로판단된다. 그러나규범적공리주의에서는한사람의법규위반은결과적으로역선택에따라사회구성원모두가따르지않는결과를초래할수있으며, 이법규는사회적혼란을야기할수도있다. 90)
153 제 4 장자율주행자동차윤리및운전자수용성조사 95 제 2 절자율주행자동차윤리인식조사 1. 선행연구분석 일반자동차운전자는자동차운행중돌발적으로발생하는윤리딜레마상황에서의평소의윤리관에따라어떠한선택을할것인가에대한고민을하기보다는본능적으로사고상황에대응하게된다. 이에따라사고의결과에대한법적책임은불가항력적상황인식과사고유발자의고의성유무에따라배분하게된다. 그러나자율주행자동차가윤리딜레마상황에직면하였을때행하게될윤리인식과행위는인간에비해이성적이라고할수있다. 돌발상황에서인간은이성보다는본능적으로자신을보호하기위한선택을할수있다. 그러나자율주행자동차는미리프로그램된알고리즘 91) 에따라이행할것이기때문이다. Bonnefon 외 (2015) 는자동차운행중직면하게될윤리적딜레마상황을상정하고이에대한평가를윤리실험방법을적용하여수행하였다. 또한자율주행자동차와운전자의윤리적선택에대해평가하도록하고, 탑승자를희생하여다수의생명을구하도록프로그램된자율주행자동차에대한구매의사조사를수행하였다. 실험결과피험자들은일반적으로자율주행자동차가사망자수를최소화하도록프로그램되는것에동의하고있는것으로나타났다. 특히자율주행자동차의운전자혹은탑승자의희생을요구하지않는경우그현상은더욱뚜렷하 90) Jeffery K. Gurney, 2016, Crashing into the Unknown: an Examination of Crash-Optimization Algorithms Through the Two Lanes of Ethics and Law, Albany Law Review, Vol.79.1, p ) 현재까지개발된인공지능의윤리판단알고리즘은초기단계에불과한것으로, 인간의윤리인식과판단프로세스를모사하는정도로, 윤리판단을위해고려해야할다양한정보를제공하는수준인것으로조사되고있다. Mclaren (2006) 은 Truth-Teller 와 SIRPCCO 는윤리적판단을위한정보를제공하여인간의윤리적판단을보조하는정도의기술이라고하였다. 그러나 MedEthEx 는의료로봇의윤리판단알고리즘과미군에서개발하고있는 Metric of Evil 은인간의윤리판단사고를모사만하는것이아니라인간의윤리판단과유사한윤리적판단결과를제공하는것을목표로연구를진행하고있으나아직까지초기단계인것으로알려져있다.
 < 그림 4-4> 윤리딜레마상황예시 그러나자율주행자동차의경우미리입력된된알고리즘에따라차량거동을선택하기때문에인간과같이이성과본능이상호배반적인선택을할수없다.")
154 96 게나타났다. 예를들면, 자율주행자동차가돌발위험상황에서한사람혹은열사람을선택해야한다면열사람의생명을구하는것이도덕적이라고평가하였다. 그러나피험자들은자기희생을법제화하는것을원하지않는것으로나타났다. 특히피험자들은자율주행자동차가공리주의적으로프로그램되는것을선호한다고응답하였으나실제로그러한자율주행자동차를구매할것인가에대해서는확신이없는것으로나타났다. 본실험시나리오는의사결정결과의불확실성이고려되지않았다는단점이있으며, 향후의사결정결과의불확실성을고려한연구가필요하다고결론을내리고있다. 자료 : Bonnefon 외 (2015) < 그림 4-4> 윤리딜레마상황예시 그러나자율주행자동차의경우미리입력된된알고리즘에따라차량거동을선택하기때문에인간과같이이성과본능이상호배반적인선택을할수없다. 자율주행자동차의윤리알고리즘은선행적으로학습되는상황을상정하고있으며, 자율주행자동차는윤리알고리즘이작동되어야하는상황에직면할경우의사결정을위한선택의여지는많지않다고할수있다. 이에따라돌발상황에서자율주행자동차의행위선택권이없는경우, 그행위의결과에대한타인
155 제 4 장자율주행자동차윤리및운전자수용성조사 97 의평가는선택권이있을때행한행위결과에비해관대한것이일반적이다. Martin & Cushman (2016) 은윤리실험을통해피험자들이좋은의도를가지고행한행동이나쁜결과를초래한경우, 강제적으로좋은행동을하였으나나쁜결과를초래한경우보다더높은수준의처벌을원한다는것을실험을통해보였다. 즉일반인은선택권 ( 상황제어권 ) 이있는행위자는그렇지못한행위자에비해좀더도덕적일것이라고인식하고있기때문에이들이행한행위의결과가나쁘다면, 그의도가좋은것이라도좀더엄중한평가를한것으로나타났다. 이러한결과는선택권 ( 상황제어권 ) 이도덕적판단에언제, 어떻게, 어떠한영향을미치는가를설명하는것이라고할수있다. 자율주행자동차의돌발상황대응을위한알고리즘이사전적으로프로그램되는만큼자율주행자동차의상황을제어할수있는선택권한이상대적으로낮을것으로판단된다. 3단계이상자율주행자동차가운행중운전자에게운행제어권을전환하기전의자율주행상태에서돌발사고로인한자율주행자동차의책임의정도를평가함에있어, 이를적용하여사고책임에대한대중의판단을가늠해볼수있다. 인간의선택은개인적인이기심과윤리판단에의해결정되지만, 사회인으로서사회적으로선호되는바람직한행위에의해개인의윤리의식과선택은변화될수있다. Steven Levitt 외 (2007) 는행동실험을통해개인의사회적선호의정도를도출할수있다고하였다. 이를위해다양한형태의최후통첩게임 (Ultimatum Game) 을설명하고실험설계에따라어떻게피험자들이사회적선호를발현하는지정리하였다. 어떠한선택을할때인간은본능적으로개인의이익을우선하여의사결정을하게된다. 그러나자신의결정이타인에게나쁜결과를초래하게될경우, 도덕성과윤리를고려하고, 사회적편익에대한고민을의사결정에반영하게된다. 이러한사회성은의사결정을위한편익분석에있어하나의사회적요소로정의될수있다.
156 98 자율주행자동차의알고리즘을개발함에있어, 앞서설명한딜레마상황에서윤리선택의문제는어느하나의윤리론에입각한선택과법적책임을고려하여결정할수는없다. 이는그것이반듯이옳다고하는명제를도출할수없기때문이다. 따라서자율주행자동차의윤리딜레마상황에서의선택방향과법적책임의분담에대한사회적합의를도출하기위해인간의선택에있어사회적선호가얼마나개입될수있는지파악할필요가있다. 2. 자율주행자동차윤리실험 가. 실험시나리오설정 본연구에서는자율주행자동차가윤리딜레마상황에서어떠한의사결정을하는것이바람직할것인가에대한판단을자율주행자동차의탑승자입장에서조명하고, 개인의윤리선택에대한사회적평가와사회적평가가피드백되었을때개인의선택에변화를미칠것인가를살펴보기위한행동실험을진행하고자한다. 실험철학이라는용어는다소생소할수있으나이는철학및윤리적문제를실증적인방식으로고찰하는학문의일종으로최근많이수행되고있는연구방법 92) 이다. 실험철학의방법은주로개인이가지고있는특정윤리문제에대한판단기준을연구하기위한설문방법, 윤리판단시뇌활성화영역의이미지를측정하는접근방법, 그리고특정윤리문제에영향을미치는요인을파악하기위한행동실험방법이있을수있다. 설문의방법은일반적인설문조사에꺼리는개인특성에관하여질문하고, 개인의성향이윤리적판단에미치는영향을연구한다. 반면행동실험은피실험자를대상으로윤리의식을대변할수있는상황을설정하고, 피실험자들이이러한상황에어떠한윤리적판단을하는지를측정하는방법이다. 92) 스텐포드철학백서 < 접속
157 제 4 장자율주행자동차윤리및운전자수용성조사 99 따라서본실험에서는자율주행자동차의윤리인식을연구하기위하여윤리실험의방법을적용하여수행하고자한다. 본실험에서는일반인과전문가를대상으로개인의성격, 경제력, 종교등이자율주행자동차의윤리인식에미치는영향을분석하고, 자율주행자동차의윤리인식에대한사회적합의도출가능성을검토할수있을것으로판단된다. 자율주행자동차가윤리딜레마상황에직면하였을때, 행위선택의결과가불확실하며, 공리주의적 (Utilitarian) 적결과를선으로보는것을가정하였다. 이는현재의도로교통운영시스템이공리주의적인입장에서설계되고있기때문이다. 이번윤리인식실험을통해도출하고자하는결과는크게세가지로요약할수있다. 첫째, 자율주행자동차의윤리딜레마상황에서인간의선택이이기적인가를실험을통해살펴보고자한다. Bonnefon 외의실험에서피험자들은자율주행자동차가공리주의적선택을하는것에동의하였으나, 개인이공리주의적으로프로그램된자율주행자동차, 즉윤리딜레마상황에서자신의안전을저해할수도있는자동차를구매할의사는낮다는결과를도출하였다. 이러한이중적인판단기준은향후공리주의적으로프로그램된자율주행자동차의구매의사에미칠영향을검토해볼수있다. 둘째, 자율주행자동차에게공리주의적선택을강제한경우, 즉윤리알고리즘이공리주의에입각하여설정된경우, 자율주행자동차가초래하게될부정적인결과에대한책임의정도를어떻게볼것인가를도출해보고자한다. Martin 과 Cushman 의실험에서는강제된선의행위결과가부정적인경우, 그책임을크지않게묻는다고하였다. 이러한결과가사람이아닌자율주행자동차에서도유사하게나타날수있는지고민할필요가있으며, 향후자율주행자동차의법적책임성부여시영향을미칠수있는인자가될것이다. 셋째, 자율주행자동차의판단이사회적으로받아들여질수있는가에대한평가를수행하고, 이러한사회적평가가피드백되었을때, 피험자들의의견은얼마나변화될수있는가를도출해보고자한다.
158 100 Levitte 은인간은어떤의사결정에있어사회적가치를편익분석의요소로볼수있으며, 이로인해개인의의사결정이사회적으로합당한방향으로변화할수있다는것을보여주었다. 자율주행자동차에대한윤리적판단에있어사회적가치가얼마나영향을미칠수있을것인지실험을통해알아보고자한다. 1) 실험시나리오컨셉 1: 자율주행자동차관점본실험시나리오에서피험자들은자율주행자동차의사고상황에대해어떠한윤리적판단을할것인가결정해야한다. 자율주행자동차의사고상황을바라보는입장은 1인칭시점으로, 내가운행하고있는자율주행자동차가사고상황에직면했을때어떠한선택을할것인가결정하도록묻고있다. 특히사고로인해발생할피해의확률이주어진경우와특정피해결과가주어진상황에서윤리판단의의견이달라질수있는가를알아보기위해질문을설계하였다. 또한 3인칭시점에서다른사람이수행한윤리판단에대한평가를하도록하였다. 이를통하여돌방사고상황에서선택의여지가제한적인자율주행자동차의선택결과에대한법적 윤리적책임의정도를어떻게묻고있는지도출해보고자한다. 마지막으로 3인칭시점에서수행한윤리판단에대한평가결과를피드백했을때 1인칭시점의피험자들의의사결정에어떠한영향을미치는지검토한다. 실험시나리오컨셉에의해도출된시나리오는다음과같다. - 이기적인 (Selfish) 자율주행자동차가특정상황에서최악의결과초래하는것으로설정하여자율주행자동차의책임정도를물음 - 공리주의적 (Utilitarian) 자율주행자동차가특정상황에서다수의행복을위해선택으로최악의결과를초래하는것으로설정 - 공리주의적 (Utilitarian) 자율주행자동차가도로인프라가제공하는정보에대해다수의행복을위해소수를희생하는선택을하여최선의결과를초래한것으로설정 - 이기주의적인 (Selfish) 자율주행자동차가도로인프라가제공하는정보에대해이기주의적인선택을하여최선의결과를초래한것으로설정
159 제 4 장자율주행자동차윤리및운전자수용성조사 101 2) 실험시나리오컨셉 2: 도로인프라관점도로인프라에서제공하는정보의정확성은불확실한것으로보며, 도로인프라의최적화목표는가능한피해를예방하는공리주의적 (Utilitarian) 도로관제를하는것으로가정하였다. 이때도로인프라의정보를받는자율주행자동차가이를따를확률은 50% 이며, 이에따라의사결정을하는자동차는이기주의적 (Selfish) 혹은공리주의적인 (Utilitarian) 자율주행자동차일수있다. 이기주의적인자율주행자동차는도로인프라의관제정보를받아자신에게유리한선택을하며, 공리주의적인자율주행자동차는도로인프라의관제정보를받아좀더많은사람들에게유리한쪽의선택을하게된다. 도로인프라의입장에서어떤자율주행자동차를만나는가는무작위이며, 이때문에발생한사고의책임이어느쪽으로기울고있는지파악하고자한다. 실험시나리오컨셉 2에따라도출된시나리오는다음과같다. - 도로관제는공리주의적이며, AV에대한정보는비대칭한것으로가정하고, 도로관제에따른 AV가최선의결과를초래한것으로설정 - 도로관제는공리주의적이며, AV에대한정보는비대칭한것으로가정하고, 도로관제에따른 AV가최악이결과를초래한것으로설정 - 도로관제는공리주의적이며, AV에대한정보는대칭인것으로가정하고, 도로관제에따르지않은 AV가이기주의적인선택에따라최악의결과를초래한것으로설정 - 도로관제는공리주의적이며, AV에대한정보는대칭인것으로가정하고, 도로관제에따른 AV가최악의결과를초래한것으로설정실험시나리오컨셉 2의시나리오결과의가정은도로인프라와자율주행자동차중제어선택권이있는측은그렇지않은측에비해엄중한평가를받게될것이라고가정한다.
160 102 3) 행동실험시나리오설정인간의이기적인선택은사회적인선호가개입될경우변화할수있으며, 자율주행자동차의선택에영향을미치는지판단을위해행동실험절차를구성하였다. 행동실험시나리오는피험자들을두그룹으로분류하여각기다른역할을부여한다. 그룹 1의피험자들에게 1인칭의시점에서컨셉 1과컨셉 2의자율주행자동차역할에서선택하도록한다. 그룹 2의피험자들은그룹 1의선택에대해 3인칭의시점에서결과에대한평가를하게된다. 그룹 1의피험자들에게자신들의판단에대한제3자 ( 그룹 2) 의평가결과를피드백하고, 다시한번선택하도록한다. 행동실험시나리오의가정은그룹 1의피험자들이그룹2의피험자들의평가결과를피드백받고다시평가할경우, 1차응답에비해공리주의적인선택을하게될것이라고가정하고있다. 나. 자율주행자동차윤리행동실험조사 앞서설명한다양한윤리실험시나리오가운데, 본 1차연구에서는연구기간의제한으로윤리행동실험을중점적으로수행하고한다. 윤리실험조사를통해자율주행에따른대표적윤리딜레마상황에서개인의윤리적판단이사회적인식에영향받아사회적합의를이룰수있는방향으로전이할수있는지알아보고자한다. 조사대상은자동차및교통관련전문가와일반인을대상으로한며, 조사방법은인터넷기반의설문실험을진행하도록하였다. 이는시간적공간적제약으로인해짧은시간내에효율적으로실험을진행하기위함이다. 조사내용은앞서설명한다양한시나리오가운데, 자율주행자동차윤리선택에관한실험을수행하고자한다. - 실험 1: 자동차운행딜레마상황에서사고에따른피해확률정보만제공되는

161 제 4 장자율주행자동차윤리및운전자수용성조사 103 경우자율주행자동차의윤리선택에사회적인식이미치는영향 - 실험 2: 자율주행자동차의윤리선택에따른사고결과정보가제공되는 경우자율주행자동차윤리선택에사회적인식이미치는영향 1) 실험절차 1 자율주행자동차윤리선택에사회적인식이미치는영향자율주행자동차윤리딜레마시나리오에서사고피해확률정보만을제공하고피험자가선택하도록설정한다. < 그림 4-5> 윤리실험 1 의절차 그룹 1의피험자들은자율주행자동차사고시나리오에평가하게될것이며, 피해확률은 0% 에서부터 100% 까지 10% 단위로분할하여무작위로제시하게된다. 그룹 2의피험자들은그룹 1이선택한자율주행자도차거동선택에대해동의정도를평가하도록한다. 그룹2의경가결과는그룹1에피드백하며, 그룹 1은다시한번무작위로제시되는피해확률을고려하여자율주행자
162 104 동차의거동을선택하게된다. 실험 1의결과를대조실험으로설정하고실험 2의결과와비교한다. 설험1의가설은다음과같다. 첫째, 그룹1의피험자들은자율주행자동차에대한윤리딜레마상황에서개인의편익이높은선택을할것이다. 둘째, 그룹2의피험자들은그룹1의선택에대해사회적편익을더높은선택에더많은동의를할것이다. 셋째, 그룹1의피험자들이그룹 2의평가결과를피드백받은이후의선택은좀더사회적편익이높은쪽의선택으로전이될것이다. 2 자율주행자동차윤리선택에사회적인식이미치는영향자율주행자동차윤리딜레마시나리오에서사고피해확률정보만있을때개인과사회적선택이사고피해결과정보가있는경우어떻게변화하는지검토하고자한다. 그룹1은사고피해확률이아닌사고의심각정도에따라 10 단계로구분하여무작위로제시되었을때자동차의거동을평가하게된다. 그룹 2는그룹1 의 2차선택에대한결과에대해동의정도를결정하게된다. 그룹 2의평가결과는그룹 1의피험자에게피드백되고, 그룹 1의피험자들은 3차평가를하게된다. 실험가설은사고피해확률을제시할때보다사고피해정도를제시한경우좀더보수적인대응즉사회적편익이높은선택을할것으로가정하였다.

163 제 4 장자율주행자동차윤리및운전자수용성조사 105 < 그림 4-6> 윤리실험 2 의수행절차 3. 자율주행자동차윤리실험결과 윤리실험조사는일반인 700 명을대상으로하여 2 차에걸쳐수행되었다. 일 반인 700 명에대한 1 차조사는 11 월 2 일부터 14 일까지약 2 주에걸쳐진행되 었다. 일반인대상 2 차조사는 12 월에진행되었다. < 표 4-1> 윤리실험표본수 구분승용차운전자비운전자그룹 1 그룹 2 남 52% 여 47% 남 51% 여 48% 표본수 400명 300명 451 명 172 명 조사대상자 700명중유효표본수는 623명이고, 실험대상그룹 1에속하는응답자는 451명이고실험대상그룹 2에속하는응답자는 172명이다. 윤리실험은자율주행자동차의윤리선택에따른피해확률을제공하는경우의선택과피해정도를제공하는단계, 그리고제3자의평가단계로총 6개의세트로구성되었다. (A F)
164 106 가. 피실험자특성 윤리실험응답자중실험대상 1에속하는응답자는 451명이고, 이중남성은 52%, 여성은 47% 이다. 연령은 20에서 60대까지균일하게분포되어있다. 운전면허소지자는 87% 이고, 미소지자는약 13% 이며, 이중평소운전을하는운전면허소지자는약 64% 이다. 응답자의 68% 는최근 5년동안교통사고경험이없었고, 25% 는 2번미만의교통하고경험이있었던것으로응답했다. 윤리실험대상 2에속하는응답자는총 172명이고, 이중남성은 51%, 여성은 48% 가참여하였다. 연령은 20대에서 60대까지균일하게분포되었다. 운전면허증소지자는 73% 이고, 미소지자는 27% 이며, 이중평소운전을하는참여자는 48% 이다. 나. 실험결과 1) 실험그룹 1 참가자실험결과피해확률만제시한실험세트에응답한참여자는모두 451명으로이중 68.7% 의응답은일관성이있었던반면, 31.3% 는일관성이없는것으로나타났다. 또한패해정도를제시한세트에응답한응답자는모두 451명이고, 이중 75.8% 의응답은일관성이있었던반면, 31.3% 는일관성이없는것으로나타나분석에서제회하였다. < 표 4-2> 그룹 1 의응답특성 비고 일관성응답 비일관성응답 전체 A 시나리오 빈도 ( 피해확률제시 ) 비율 (%) B 시나리오 빈도 ( 피해정도제시 ) 비율 (%)
165 제 4 장자율주행자동차윤리및운전자수용성조사 107 자율주행자동차피해확률을제시하였을때선택에일관성을보인참여자의선택을살펴보면다음그림과같다. 자율주행자동차의윤리판단시나리오에서자율주행자동차가같은방향으로계속주행할때갑자기나타난보행자 10명의피해확률을제시하였고, 이와더불어주행방향을전환할경우자율주행자동차탑승자가피해를볼확률을제시하였다. 이실험에서피험자들은전반적으로타인의피해를줄이는방향의선택을한것으로나타났다. 자율주행자동차의윤리판단시나리오 1은자율주행자동차가계속주행을할경우보행자가피해를볼확률은 0% 이고, 방향을바꾸었을때탑승자가피해를볼확률이 100% 인시나리오에있어어떤윤리판단을할것인지차량거동을선택하도록하였다. 실험시나리오 1에서계속주행해야한다는응답을한참가자의 75.3% 이고, 방향전환을하여보행자를보호해야한다고응답한참가자는 24.7% 로나타났다. < 그림 4-7> 피해확률제시에따른선택
166 108 보행자의피해확률이 20% 이고탑승자피해확률이 80% 인시나리오에서방향을전환하여탑승자가피해를보는차량거동을선택한참여자가 54.4% 인반면, 같은방향으로주행을계속해야한다고한응답자가 45.6% 로나타났다. 자율주행자동차탑승자의피해확률이 100% 이고, 보행자피해가 0% 인시나리오에서자율주행자동차의거동을전환해야한다고한참가자는 24.7% 로자신의희생에도불구하고보행자를보호해야한다는의견을보였다. 한편, 탑승자피해가 0% 이고보행자피해가 100% 인시나리오에서같은방향으로주행해야한다는이기적인판단을한참가자는 6.6% 로나타났다. 또한, 보행자의피해확률이 0% 에서 10% 로증가하였을때약 22.1% 의응답자들이자신보다는타인의피해를최소화하는방향으로선택을전환하였다. 두번째실험은사고의결과로나타나는피해의정도는보행자의피해는사망사고자 0명에서 10명까지로제시하였고, 자율주행자동차탑승자의피해정도는찰과상에서부터사망에이르는단계까지의상해정도를 자동차손해배상법 에서정의하는후유장애등급을제시하였다. < 그림 4-8> 피해정도에따른참가자의선택
167 제 4 장자율주행자동차윤리및운전자수용성조사 109 시나리오 2, 즉자율주행자동차탑승자의피해는생명을잃는것은아니나고도의후유장애가남는경우와보행자사망 1명이발생한시나리오에서가장많은피험자들이방향을전환하여보행자를보호해야한다는선택을하였다. 또한, 탑승자는사망에이르나보행자사망자는없는상황에서 17% 의참가자들이여전히차량거동을전환하여보행자를보호하는선택을하였다. 반대로탑승자피해가없고, 보행자전부가사망에이르는상황에서차량거동을바꾸지말아야한다는참가자는 6.1% 에불과한것으로나타났다. 이실험결과에서참여자들의선택은피해정도를확률로제시했을때보다는명확한피해정도를제시했을때행태변화가뚜렷하게나타났다. 피해확률만을제시했을때보행자의피해확률이 0% 에서 10% 로증가한경우자율주행자동차거동을변경하는선택을한참가자는 22.1% 인반면, 피해정도가보행자사망 0명에서 1명으로증가했을때방향을전환하는차량거동을선택한참가자는 40% 로증가하였다. 두실험결과에서극단적인이기주의자, 즉자율주행자동차의피해확률이 0% 임에도계속주행을선택한피험자는약 6% 인것으로해석할수있으며, 극단적인공리주의자, 즉보행자의피해확률이 0% 임에도방향전환을선택한피험자는 17% 25% 인것으로나타났다. < 표 4-3> 피해의정도제시방법에따른참가자의견변화 보행자피해수준피해확률제시에따른변화율 (%) (%) 피해정도제시에따른변화율 (%)
168 110 확률제시시나리오에따라의견을변경하지않은응답자는전체의 28.5% 인것으로나나타났다. 이중계속주행을할것을선택한이기적인응답자는 4.2% 인것으로나타났고, 탑승자위험에도불구하고계속주행을선택하여보행자 10인의생명을보호하겠다고한응답자는 24.3% 인것으로나타났다. 응답자의 27% 는시나리오 2에서계속주행에서방향전환을선택하였다. < 그림 4-9> 확률제시시나리오와피해정도제시시나리오에따른의사변경비율 피해정도를제시한실험에서는피해확률제시실험에서와유사하게약 4.6% 가계속주행하겠다는의사를변경하지않아이기적인선택을한반면, 18.5% 는방향전환을하겠다는의사를변경하지않고자신을희생하여보행자의생명을보호하겠다는이타적인선택을하였다. 또한시나리오 2에서참가자의 43.8% 가계속주행에서방향전환을선택한것으로나타났다. 실험 A와실험 B 모두계속주행을유지한응답다는 4.2% 와 4.6% 로큰차이를보이지않았으나방향전환을유지한응답자는 24.3% 와 18.3% 로차이가있는것으로나타나확률이라는수치보다는실제피해정도를제시하였을때응답자가받아들이는심각도가높은것으로유추해볼수있다.
169 제 4 장자율주행자동차윤리및운전자수용성조사 111 2) 실험그룹 2 참가자결과실험그룹2의참가자는실험그룹 1의차량거동선택에대한평가를하는실험그룹으로실험그룹 451명의선택중일관성의유무를불문하고실험그룹 2에제시하였다. 실험그룹 2에참가한참가자는모두 172명이다. 실험그룹 2는실험그룹 1의시나리오별응답에대한자신의동의정도를 1에서 4까지선택하도록하였다. 실험그룹 1과실험그룹 2의참가자는 1:1 매칭이되도록하였다. 동일시나리오에서실험그룹 1이방향전환을선택한경우에대한그룹2의평가를살펴보면, 시나리오 3과시나리오 4에서큰차이를보이고있다. 이는실험그룹 1의패턴과유사한패턴이라고할수있다. 시나리오 3은자율주행자동차피해확률은 80% 일때보행자피해는 20% 인경우이고, 시나리오 4의경우는자율주행자동차의피해확률은 70% 이고보행자피해는 30% 인경우이다. 그룹 1의피험자들은시나리오 3에서보다는시나리오 4의선택에서더많은수의피험자들이방향을전환하여보행자를보호하겠다는선택을하였다. 또한그룹2의피험자들역시더많은사람들이방향전환하는것에동의한다고답하였다. 그러나극단적인상황에서는그룹1의참가자들과는다소다른선택을하였다. 실험그룹 2는자율주행자동차에게불리한선태에대해동의하지않는응답자가더많은것으로나타났다. 실험시나리오 11의경우자율주행자동차의피해확률은 0% 인반면, 보행자의피해확률은 100% 인상황이다. 이상황에서실험그룹 1의피험자의 94% 가방향을전환하여보행자를보호해야한다는선택을하였다. 그러나이에대한그룹 2의평가는다소차이를보여 21% 의응답자들은그룹1의보행자를보호하는선택에동의하지않는것으로나타났다.
170 112 < 표 4-4> 실험그룹 1의선택에대한실험그룹 2의평가 ( 확률제시 ) 비고 계속주행방향전환동의반대동의반대 시나리오 1 92 (68%) 44 (32%) 17 (47%) 19 (53%) 시나리오 2 54 (52%) 49 (48%) 33 (48%) 36 (52%) 시나리오 3 48 (54%) 41 (46%) 42 (51%) 41 (49%) 시나리오 4 41 (57%) 31 (43%) 63 (63%) 37 (37%) 시나리오 5 33 (58%) 24 (42%) 81 (70%) 34 (30%) 시나리오 6 15 (44%) 19 (56%) 97 (70%) 41 (30%) 시나리오 7 3 (15%) 17 (85%) 102 (67%) 50 (33%) 시나리오 8 3 (27%) 8 (73%) 123 (76%) 38 (24%) 시나리오 9 8 (53%) 7 (47%) 115 (93%) 9 (7%) 시나리오 10 5 (38%) 8 (62%) 124 (78%) 35 (22%) 시나리오 11 4 (44%) 5 (56%) 129 (79%) 34 (21%) 피해의정도를제시하는실험에서그룹 1의피험자들은시나리오 1의선택과시나리오 2의선택이확연이달라지는경향을보였으며, 실험 2 그룹의피험자들역이이와유사한경향을보였다. 시나리오 10과시나리오 11에서그룹1의피험자들은가장이타적인선택을하여 95% 이상이시나리오 11에서방향전환을하는선택을하였다. 그러나이에대한그룹 2의평가는다소차이가있어, 방향전환을선택한실험그룹 1 실험참가자의의견에동의하지않는다는참가자가 24% 인것으로나타났다. 이러한결과는제3자인평가자의입장에서는자율주행자동차의탑승자입장에비해다소자유로운선택을할수있었기때문인것으로판단된다. 또한자율주행자동차사고상황에서그책임을감수해야하는탑승자의입장에서보다는책임의정도가약한평가자의입장에서자율주행자동차탑승자의이기적인선택의결과가다소부정적인결과, 즉보행자의피해가커지는결과를초래하더라도그에대한책임성을다소경하게물을수있다고해석될수있으며, Martin과 Cushman 의결과와유사점이있다.
171 제 4 장자율주행자동차윤리및운전자수용성조사 113 < 표 4-5> 실험그룹 1의선택에대한실험그룹 2의평가 ( 피해정도제시 ) 비고 계속주행방향전환동의반대동의반대 시나리오 (69%) 47 (31%) 8 (40%) 12 (60%) 시나리오 2 46 (52%) 42 (48%) 44 (52%) 40 (48%) 시나리오 3 27 (47%) 31 (53%) 63 (55%) 51 (45%) 시나리오 4 25 (45%) 31 (55%) 71 (61%) 45 (39%) 시나리오 5 15 (37%) 26 (63%) 81 (62%) 50 (38%) 시나리오 6 9 (29%) 22 (71%) 82 (58%) 59 (42%) 시나리오 7 15 (47%) 17 (53%) 94 (67%) 46 (33%) 시나리오 8 7 (29%) 17 (71%) 99 (67%) 49 (33%) 시나리오 9 4 (31%) 9 (69%) 118 (74%) 41 (26%) 시나리오 10 4 (21%) 15 (79%) 107 (70%) 46 (30%) 시나리오 11 2 (29%) 5 (71%) 126 (76%) 39 (24%) 3) 그룹 1 참가자에대한피드백후실험그룹 1의참가자들에게그룹 2의평가를피드백하고어떻게의견을바꿀것인가에대한설문을진행하였다. 그룹 1의참가자들에게제시한그룹2의평가결과는표 4-2와표4-3과같다. 2차실험에다시참가한그룹 1의참가자수는 109명이었다. 실험 2의평가결과를피드백한후응답자들은당초의의견을변경하지않은것으로타났다. 이는 2차실험진행시에 1차실험에서자신이한응답을알려주고새로운선택을하도록하였기때문에, 선행실험시의의사결정에대한잔상의영향이미친것으로판단된다.
172 114 < 표 4-6> 확률제시시나리오 2차실험결과 비고 1차실험 2차실험같은방향1 방향전환1 같은방향2 방향전환2 시나리오 1 77% 23% 79% 21% 시나리오 2 56% 44% 58% 42% 시나리오 3 50% 50% 54% 46% 시나리오 4 41% 59% 46% 54% 시나리오 5 30% 70% 33% 67% 시나리오 6 20% 80% 26% 74% 시나리오 7 13% 87% 11% 89% 시나리오 8 6% 94% 6% 94% 시나리오 9 10% 90% 6% 94% 시나리오 10 6% 94% 4% 96% 시나리오 11 5% 95% 6% 94% < 표 4-7> 피해정도시나리오 2차실험결과 같은방향1 방향전환1 같은방향2 방향전환2 시나리오 1 89% 11% 87% 13% 시나리오 2 52% 48% 52% 48% 시나리오 3 33% 67% 31% 69% 시나리오 4 30% 70% 28% 72% 시나리오 5 20% 80% 22% 78% 시나리오 6 17% 83% 17% 83% 시나리오 7 16% 84% 16% 84% 시나리오 8 13% 87% 10% 90% 시나리오 9 10% 90% 6% 94% 시나리오 10 11% 89% 14% 86% 시나리오 11 5% 95% 5% 95%

173 제 4 장자율주행자동차윤리및운전자수용성조사 115 4) 실험후질문실험에참가한일반인 623명과전문가 75명에게자율주행자동차의윤리에관한질문을하였다. 먼저실험시나리오와같은상황에서자율주행자동차가헬멧을착용한오토바이와헬멧을착용하지않은오토바이운전자중한명과충돌해야만하는상황이된다면어떤선택을할것인가를물었다. 일반인 623명중 19% 는계속주행하여헬멧을착용하지않은운전자와충돌할것이라고답했고, 81% 는방향을전환하여헬멧을착용한운전자와충돌할것이라고응답하였다. 일반인중운전자와비운전자간의차이는높지않은것으로나타났다. 반면전문가는일반인과는다른선택을하여, 전문가 32% 는계속주행하여헬멧을착용하지않은운전자와충돌할것이며, 66% 는방향을전환하여헬멧을착용한이륜자동차운전자와충돌할것이라고선택하였다. 물론이질문에서자율주행자동차운전자는어쩔수없이둘중하나의이륜자동차운전자와충돌해야만하는것을가정한것이다. < 그림 4-10> 이륜자동차충돌시나리오에대한선택비교

174 116 이러한선택의결과는충돌사고시나리오에서예상되는자율주행자동차의피해정도에따라다른선택을하고있는것으로판단해볼수있다. 이륜자동차의경우헬멧을착용한운전자와그렇지않은운전자모두충돌로자율주행자동차에미치는영향에차이가많지않은것으로판단되며, 이경우상대방의피해를최소화할수있는선택을한것으로분석된다. 한편, 이번에는피치못할충돌상황에서 SUV와경차중하나를선택해야한다고했을때응답자들의선택은양분하는모습을보였다. 일반인운전자와비운전자및전문가모두계속주행하여대형차와충돌할것인지방향을전환하여경차와충돌할것인지에대한선택에서약 50% 는방향전환약 50% 는계속주행을선택하였다. < 그림 4-11> 대형차와경차충돌시나리오에대한선택비교 앞선딜레마상황에직면했을때자율주행자동차가제일먼저고려해야할요소에대한의견을물었을때, 일반인운전자의 72% 와비운전자 75% 및전문가 63% 의응답자들이탑승자와보행자모두를고려하여전체적인피해를최소화해야한다는공리주의적인윤리철학에동의하고있는것으로나타났다.

175 제 4 장자율주행자동차윤리및운전자수용성조사 117 또한보행자의안전을제일먼저고려해야한다고한응답자는일반인운전자의 20%, 비운전자의 16%, 전문가 14% 인것으로나타났다. 그러나탑승자를먼저고려해야한다고응답한응답자는다소차이를보이고있어일반인의경우운전자의 7% 와비운전자의 5% 가탑승자를먼저고려해야한다고했다. 반면, 전문가의경우 16% 가고려해야한다고응답하여일반인들과다른의견을보였다. < 그림 4-12> 딜레마시최우선고려사항비교 자율주행자동차가딜레마상황에직면했을때상황대응에대한결정권한을물었을때일반인운전자와비운전자모두자율주행자동차탑승자가해야한다는의견이각각 53% 와 51% 로나타났다. 반면제작사가결정해야한다고한응답자는일반인운전자 23% 이고비운전자는 33% 로다소차이가나타났다. 또한정부및법률로정해야한다고한응답자는일반인운전자 22%, 비운전자 14% 로나타나다소차이를보였다. 이는일반인실험참가자들의자율주행자동차에대한운행지배권한은운전자에있다고다소직관적인응답을한것으로판단된다.
176 118 < 그림 4-13> 딜레마직면시상황결정권자 반면, 전문가의경우일반인과다소다른결과를보였다. 딜레마시결정권자에대해, 정부및법률로정해야한다는의견이 42% 이고, 자율주행자동차탑승자라고한의견이 33%, 그리고제작사는16% 인것으로나타났다. 자율주행자동차가딜레마상황에서차량거동을결정함에있어어느개인혹은자동차제작사가스스로결정하기보다는사회적합의에의해기본적인범위를법규범으로정하고, 그범위안에서개별상황에맞게운용하는것이적절하다고판단한것으로볼수있다. 이러한결과는딜레마시어느한쪽의편익을고려하기보다는다수의편익을고려해야한다는의견많아다소공리주의적인입장을반영한것으로판단된다. 5) 자율주행자동차교통법규준수의견자율주행자동차의도로주행중교통법규준수, 특히속도규정준수의정도와관련하여, 일반인과전문가모두철저히준수해야한다는의견이지배적인것으로나타났다. 일반인운전자의 73%, 비운전자의 78%, 전문가의 67% 는교통법규를철저히준수해야한다고응답했다. 또한일반인운전자의 5%, 비운전자의 7% 와전문가 10% 는자율주행자동차만을위한별도의교통규정을마련해야한다고응답하였다. 이에따라일반인

177 제 4 장자율주행자동차윤리및운전자수용성조사 119 의 22%, 비운전자 14%, 그리고전문가의 23% 는교통법규를다소위반할수 있다고응답하였다. 특히전문가의 16% 는 5% 범위내에서교통법규 ( 속도규 정준수 ) 에대해위반하여자동차를운영할수있다고응답하였다. < 그림 4-14> 교통법규준수정도 공유자율주행자동차의도로운행중발생한교통법규의위반에따른책임소재를물었을때, 일반인운전자및비운전자와전문가모두공유운영자혹은제작자에게책임이높다는의견을보였다. 일반인운전자의 44% 와비운전자의 38% 는공유차운영자에게책임이있다고응답하였고, 일반인운전자의 31% 와비운전자 34% 는제작자에게책임이있다고응답한반면탑승자의책임은상대적으로낮은다는의견을보였다. 일반인운전자의 14% 와비운전자 9% 만이탑승자에게책임이있다고응답하였다. 반면전문가는일반인과다소차이를보여 33% 는공유운영자에게책임이있다고보고, 27% 는제작자그리고 22% 는 3자모두에게책임이있다는견해를보였다. 또한전문가의 8% 만이탑승자에게책임이있다고하였다.

178 120 이는공유용자율주행자동차의소유권한은운영자에게있다고보는인식이높으며, 이에따라운행중발생한교통법규위반에대한책임은운영자에게있다고보는의견이많은것으로해석될수있다. 이는또한공유용자율주행자동차의기능에관한특성과정보는탑승자보다는자율주행자동차를설계한제작자와공유운영을위해유지관리하는운영자에게더많다고볼수있어, 그에따른책임은정보가큰편에배분하는것이합리적이라는최소비용회피원칙을적용하기위한논거로활용될수있음을함의한다. < 그림 4-15> 공유자율주행자동차책임소재에대한의견 한편, 탑승자가타지않은자율주행자동차가도로주행중발생한책임의소재를물었을때, 일반인운전자의 33% 와비운전자 26% 는자율주행자동차소유자에게책임이있다고하였고, 일반인운전자의 40% 와비운전자의 35% 가제작사에게책임이있으며, 운전자의 27% 와비운전자의 38% 는모두에게일부의책임이있다고응답하였다. 전문가의과반수인 52% 가아무도타지않은자율주행자동차가도로운행중발생한책임은제작자에게있다고응답하였고, 30% 만이모두에게일부책임

179 제 4 장자율주행자동차윤리및운전자수용성조사 121 이있다고응답하였다. 그러나전문가의 16% 만이소유자에게책임이있다고하여, 아무도타지않은자율주행자동차의경우소유자보다는제자가더많은정보를가지고있기때문에이를회피할수있는기회가상대적으로많다고보는것으로판단해볼수있다. 이렇게아무도탑승하지않은공차자율주행자동차가발생한책임소재에대한문제는향후자율주행자동차의이용활성화에많은영향을미칠것으로예견되며이에대한논의가지속적으로이루어져야할것으로판단된다. < 그림 4-16> 공차자율주행자동차책임소재의견
180 122 제 3 절자율주행자동차의운전자수용성 1. 선행연구사례분석 1) 자율주행자동차에대한일반대중의의견 (Schoettle and Sivak, 2014)) 미시건대학교연구팀에서는 18세이상성인 1,533명을대상으로자율주행자동차에대한설문조사를실시하였다. 본조사는주요영어사용국가인미국, 영국, 호주에거주하는일반인을대상으로조사하였다. 응답자의 24% 가 1단계자율주행기능이장착된자동차를운행하고있는것으로조사되었다. 일반인의자율주행자동차에대한인식과개인의실제이용의사는상호불일치하는것으로나타났다. 다수의응답자들이자율주행자동차를이미인지하고있었으며, 기술에대해긍정적인인식과기술의편익에대한기대치가높은것으로나타났다. 그러나자율주행자동차의운행에대한우려를나타냈으며, 특히보안문제, 운행성능미흡, 영업용자동차 ( 버스와택시 ) 운행에대한우려를나타내었고, 구매의사는낮은것으로조사되었다. 또한많은응답자들이자율주행기능을자신의차량에탑재하기를원했으나, 추가비용을부담하는것은원하지않는것으로나타났고, 남성보다는여성이자율주행자동차에대한우려가높은것으로나타냈다. 자율주행자동차와관련된우려사항으로는자동차기능에대한신뢰성부족과관련된이슈에우려를나타내었다. 자율주행자동차의오작동및시스템오류로인한안전문제가가장큰우려사항인것으로조사 (46.8%) 되었고, 운전자가자동차를제어할수없는차량을이용하는것에대한우려가가장높은것으로나타났고 (54.3%), 버스와같은대중교통이완전자율주행으로운행하는것에대한우려를나타냈다.(45.9%) 또한자율주행으로발생하는운행중여유시간을어떻게사용할것인가에대한조사에서 3개국응답자들의 41% 는전방을주시하겠다고응답하였다. 완전자율주행자동차를이용하지않겠다는응답자도 22.4% 로높게나타났다.
181 제 4 장자율주행자동차윤리및운전자수용성조사 123 2) 자율주행자동차에대한일반대중의수용성 (Casley 외, 2013) Worcester 대학학생과임직원 413명을대상으로자율주행자동차수용성조사를실시하였다. 자율주행자동차수용성에영향을미치는변수로안전, 법제, 비용요소를주요소로, 생산성, 에너지효율및환경을부요소로선정하여조사하였다. 에너지효율에대해 77% 가긍정적으로응답, 안전에대해 45.3% 가부정적으로인식, 생산성에대해 48%r가부정적, 39.9% 가긍정적으로응답, 법제도에대해 46.6% 중립, 33.7% 가긍정으로응답하였다. 다만본조사는대학학생및학교임직원을대상으로하였기때문에교육수준이일반대중에비해높아해석에있어편중될수있다. 3) 자율주행자동차의소비자수용성및통행특성에미치는영향 ( Zmud, 2016) 미국 TTI 연구소에서는자율주행자동차의소비자수용성조사를통해수용성에영향을미치는변수를도출하고이를바탕으로통행특성모델링에적용하여통행특성변화및향후교통류에미치는영향을분석하였다. 도출변수는이용가능성, 이용자수용성에영향을미치는요소, 자율주행자동차의긍정적인면, 자율주행자동차의이용에따른통행행태변화요소이다. 성인 556명으로온라인설문조사를실시하고 44명을추출하여대면조사실시한결과, 이용가능성에대해 36% 가어느정도, 32% 가어느정도이용하지않을것으로응답하여, 긍정과부정이대략양립하고있는것으로나타났다. 현재이용하는차량의자동화기능탑재여부가자율주행자동차의이용가능성에가장큰영향을미치고있는것으로조사되었다. 회귀분석결과운전이신체적인이유로어려움이있는경우자율주행자동차를이용할의도가높은것으로분석되었으며, 그다음으로심리적인영향으로이용자들이사회적편익보다는개인의편익에중점을두고있다는것으로분석되었다.
182 124 사회적영향도이용의도에높은영향을미치는것으로분석되었다. 자율주행자동차를이용하도록하는장점을물은결과, 안전, 운전스트레스감소, 운행중생산성향상, 대중교통과유사하나더월등한장점, 미래물결, 고령자모빌리티제공, 시장에출시되기전좀더철저한성능안전검사라고많은응답자들이응답하였다. 예상되는통행특성변화를분석하기위하여차량보유대수, 자가용차량보유보다는공유차량이용경향, 수단선택및총통행량변화등에대한변수도출을통해도로밀도, 고속도로요량, 자율주행자동차비율증가에따른정체정도에미치게될시사점을도출할수있을것으로판단된다. 통행특성에관한변수는 44명의대면조사를통해도출하였으며, 44명은온라인설문조사에서자율주행자동차를이용할의사가있는응답자에서선정하였다. 자율주행자동차를이용하고자하는이유는사람이운행하는것보다안전할것이며, 운전으로인한스트레스를줄일것이고, 대중교통과비교하여우수할것이며, 자율주행기능이신뢰할만한수준에이르렀을때시장에서판매될것으로응답하였다. 이들은자율주행자동차구매의사는 59% 구매이고, 41% 는공유할것으로응답하였다. 자동차보유대수의변화는 23% 가감소할것이며 16% 만이증가할것으로응하고, 통행량변화에대해 29% 는기존과변화없을것으로 25% 는증가, 9% 는감소할것으로응답했으며, 특히 66세이상응답자는통행이증가할것으로응하였다. 장거리운행에있어수단선택은 45% 가자율주행자동차로인해장거리통행수단을변경할것으로응답하였다. 4) 자율주행자동차도로실증실험에대한수용성조사 (2016) 일본국토교통성에서는자율주행자동차의공공도로시험운행에대한도로이용자의수용성에대한조사를실시하였다. 본조사의주용목적은도로실증실험에대한일반인의불안정도와도로에서자율주행자동차를마주했을때어떠한대응을할것인지와사고발생시사고책임에대한사회적수용성조사라고할수있다.
183 제 4 장자율주행자동차윤리및운전자수용성조사 125 도로실증실험에대해찬성한다는의견이 47.2% 이고, 반대한다가 17.5%, 모르겠다는응답이 23.1% 로나타났다. 또한도로운행중자율주행자동차를마주했을때 41.9% 가다가가지않는다는경계심을나타냈고, 20.9% 가잠시지켜보겠다는정도의소극적인관심을보였다. 또한 15.3% 는적극적인관심을보여접근해서관찰해보겠다고응답했다. 실증실험도중발생한사고에대해 31.3% 가실증실험을수행하고있는주체가책임을감수해야한다고응답했고, 현행법령에따라당사자가책임을져야한다와실증주체외에행정부에서도책임을져야한다고의견이갈리는결과가나왔다. 자율주행자동차의효과에대한기대로교통사고가감소할것이라고 66.9% 의응답자들이답했고, 고령자등의이동지원이기대된다고한응답자는 50.8% 로나타났다.( 복수응답 ) 자율주행자도차의불안요소로아직까지기술이완성단계에있는것이아니기때문에자율주행자동차의운전시스템자체에대한불안이 51.9% 로가장높았고, 사람이많은지역에서의주행에대한불안이 51%, 시스템오작동시의우려가 50% 로높게나타났다. ( 복수응답 ) 부분자율주행자동차의구매의사에대해 34.9% 가구입하고싶다는긍정적인의견이고구입하지않고싶다는부정적인의견은 38.1%, 잘모르겠다는의견도 26.9% 였다. 그러나완전자율주행자동차에대한구매의사는 29.7% 가구매에긍정적인응답을하였고, 44.3% 는부정적인응답을하여완전자율주행자동차기술에대한이해가부족한것으로나타나향후자율주행자동차수용성향상을위한일반인의이해도를높일수있는방안마련이필요하다고결론을맺었다.
184 자율주행자동차운전자수용성조사설계 가. 조사목적 자율주행자동차등장에따른운전행태변화예측을통한관련기술개발을위한운전자수용성을조사는필수적인요소라고할수있다. 자율주행자동차의수용성을진단하는주요요소는앞선선행연구에서논의한바와같이자율주행자동차의이용가능성과자율주행자동차이용에따른통행특성변화를고려해볼수있다. 자율주행자동차의이용가능성에영향을미치는요소로는자율주행기술에대한신뢰성, 이용편의성및효율성, 경제성이가장큰영향을미칠것으로판단된다. 자율주행자동차는아직까지일반운전자가이용할수있는기술이보급된것이아니기때문에이용가능성을검토하는것이적합 93) 하다. 자율주행기술은단계별차이는있겠으나아직까지활발한기술개발이이루어지고있는기술로운전자의이용가능성을판단하기위해기술에대한이해가필요하다. 특히, 완전자율주행기술의경우운전자가운행제어를하지않고도로를운행하는차량으로자동차이용자뿐만이아니라주변차량및도로이용자와의상호작용이필요하다. 자율주행자동차의이용가능성은자가용자동차의운전자수용성과더불어영업용자동차인대중교통즉자율주행기능이장착된버스, 택시및화물자동차운전자의이용가능성에대한논의도필요하다. 자율주행 3단계의영업용자동차, 즉버스, 택시및화물자동차의경우운전자의운행효율증대를통한운행안전성을활보할수있을것으로판단된다. 특히화물자동차의군집주행은현재많은국가에서기술실증을하고있다. 그러나영업용자동차의 3단계자율주행기능도입을위해운전자수용성이가장큰변수로작용할수있다. 이는자율주행기술이보급된다하더라고운전 93) 권영종외 2015 신기술및고령화등교통환경변화에대응한교통정책구현로드맵수립, 한구교통연구원, p.59
185 제 4 장자율주행자동차윤리및운전자수용성조사 127 자가실제로얼마나자율주행기능을사용하는가에따라기술이이루고자하는사회 경제적목적달성이달라질수있기때문이다. 따라서영업용자동차운전자의자율주행기능활용의사에대한고민이필요하고, 4단계자율기능이적용된영업용자동차를도입하게될경우교통물류분야의구조변화특히노동구조의변화가예측된다. 이용편의성및효율성은특히완전자율주행기술이전단계에해당하는내용으로운전자가 3-4단계자율주행기술을이용하기위한일정수준의교육이필요하다. 3-4단계자율주행자동차는운전자의전방주시가필요하며, 위험상황에직면했을때적절한대응이필요한기술이기때문이다. 이에따라자율주행자동차운전자는자율기능을활용하기위한기술습득이필요하며, 기능습득의난이도가높을경우이용을회피할우려가있다. 또한자율주행자동차이용을통한효율성, 즉자율주행으로차량을운행하는동안업무및기타효율을높일수있어야할것이다. 마지막으로, 자율주행자동차기술의보급에가장중요한요소는차량의경제성이라고볼수있으며, 기술에대한지불가능가격을통해자율주행기술에대한선호를파악할필요가있다. 나. 조사내용 자율주행자동차수용성분석을위한조사항목은, 조사대상에따라자가용자동차에대한일반인의수용성과영업용자동차 ( 버스, 택시및화물 ) 에대한운전자수용성으로구분해볼수있다. 비영업용자동차이용자의자율주행자동차수용성조사항목은이용가능성, 자율주행자동차에대한선험적인식, 자율주행기술에대한지불용의가격과더불어, 자율주행자동차의윤리와책임에대한의식조사가필요하다. 영업용자동차운전자의경우개별기술에대한인지도 ( 버스, 택시, 및화물차군집주행등 ), 선험적선호및인식, 기술습득의사및이용의사등의조사가필요하다.
186 128 다. 조사대상및방법 조사대상은일반인 700명과교통및자동차관련기술 / 정책전문가 75명영업용버스 / 택시 / 화물자동차직업운전자 220명을대상으로설정하였다. 조사방법은두가지형태로진행되었다. 일반인과전문가그룹의조사는온라인기반의조사를실시한반면, 영업용자동차운전자의경우인터넷접근의불편등을감안하여대면조사를실시하였다. 조사기간은 2016년 11월 2일부터 7일간진행되었다. 3. 조사결과 가. 응답자특성 1) 일반사항일반인응답자의유효사례수는 623명, 전문가는 73명, 그리고직업운전자는 220명이수집되었다. 일반인의성비는남성 53% 이고여성 47% 인반면, 전문가중남성은 85% 이고여성은 15% 가수집되었다. 일반인응답자중 61% 는기혼이고, 39% 는미혼이며, 전문가응답자의 66% 는기혼, 34% 는미혼이다. 또한응답자중일반인운전자는 57% 이고, 비운전자는 42.9% 이다. 연령은 20대에서 60대까지균일하게분포되었다. 일반인의교육수준은 4 년제대학졸업자이상이 65% 이고, 전문가는 94% 이다. 월평균소득은일반인은 3-4백만원이가장많은 23% 를차지하고있으나전문가의경우 6백만원이상이 36% 를차지하여전문가의소득이일반인에비해상대적으로높은것으로나타났다.
187 제 4 장자율주행자동차윤리및운전자수용성조사 129 < 표 4-8> 응답자특성 ( 일반인 / 전문가 ) 성별 연령 평소운전여부 학력 혼인여부 가족수 월평균소득 종교 일반인빈도백분율전문가빈도백분율 남성 % 남성 62 85% 성별여성 % 여성 11 15% 20대 % 20대 20 27% 30대 % 30대 16 22% 40대 % 연령 40대 21 29% 50대 % 50대 12 16% 60대 % 미싱 4 5% 운전 % 고등학교졸업 2 3% 미운전 % 2 년제대학졸업 2 3% 고등학교졸업 % 학력 4년제대학졸업 27 37% 2년제대학졸업 77 12% 대학원졸업 ( 석사 ) 22 30% 4년제대학졸업 % 대학원졸업 ( 박사 ) 20 27% 대학원졸업 ( 석사 ) 53 9% 혼인 기혼 48 66% 대학원졸업 ( 박사 ) 4 1% 여부 미혼 25 34% 기타 6 1% 2년미만 9 14% 기혼 % 2-5년미만 13 21% 전문미혼 % 5-10년미만 6 10% 분야 % 10-15년미만 14 22% 종사 % 15-20년미만 8 13% 기간 % 20-25년미만 9 14% % 25년이상 4 6% % 2백만원미만 7 10% % 2-3백만원미만 8 11% 6 1 0% 3-4백만원미만 7 10% 소득 9 1 0% 4-4백만원미만 13 18% 2백만원미만 74 12% 5-백만원미만 11 15% 2-3백만원미만 % 6백만원이상 26 36% 3-4백만원미만 % 있음 31 42% 종교 4-4백만원미만 % 없음 42 58% 5-백만원미만 90 14% 6백만원이상 % 있음 % 없음 % 직업운전자는버스운전자및사업자 27%, 택시운전자및사업자 45% 가분 포하고있으며, 화물자동차운전자및사업자가 27% 분포하고있다.
188 130 < 표 4-9> 응답자특성 ( 직업운전자 ) 전문분야 운수사업자 빈도 백분율 버스운전자및사업자 60 27% 택시운전자및사업자 % 화물차운전자및사업자 60 27% 영업용자동차운전자의종사기간은 5~10년미만이 30.0% 로가장높게나타났으며, 이어서 2~5년미만 (29.5%), 10~15년미만 (14.5%) 등의순으로나타났다. 영업용차량운전자의세부전문분야별로살펴보면, 화물트럭운전자및물류사업자를제외한모든운전자에서 5~10년미만이가장높았고, 화물트럭운전자및물류사업자는 2~5년미만에서 33.3% 로가장높았다. < 그림 4-17> 종사기간 2) 통행및자동차이용특성 1 일반인운전자운전자의주이용교통수단은자가용 ( 자동차및이륜자동차 ) 이 33.8% 로가장높았고, 버스와지하철을이용한다는응답자는 25.3%, 버스, 지하철, 자가용을
189 제 4 장자율주행자동차윤리및운전자수용성조사 131 이용하는응답자는 18%, 지하철을이용하는응답자는 12% 인것으로나타났다. 반면, 비운전자의주요교통수단은, 대중교통수단인버스와지하철이 45.5% 로가장높았고, 지하철 24.6%, 버스 18.3% 순으로나타났다. 주로이용하는교통수단은응답자의소득에민감하게영향을받는것으로나타나, 소득이 199만원이하인응답자의 54.5% 가자가용보다는대중교통을이용하는것으로나타났다. 비운전자의경우에도대중교통을많이이용하고있었으나, 월평균가구소득이 600만원이상인응답자의 26.1% 로상대적으로낮게나타났다. < 그림 4-18> 주이용교통수단 통근거리는평균 19.96km 이며, 가장많은응답자들이통근거리가 10-20km 라고응답하였다. 통근시간은 30분에서 1시간통행한다고한응답자가 44% 이고, 그이상이 30.6% 로평균 분인것으로파악된다. 운전자의평균통근거리는 20.7km 비운전자는 18.88m 이며, 통근시간은운전자는 분이고, 비운전자는 47.21분으로나타나, 대중교통이용자의통근거리는짧은반면, 더많은시간을소비하고있는것으로나타났다.
190 132 < 그림 4-19> 통근거리및시간 운전자의평균차량보유대수는 1.11 대로, 1 대의비율이 81.8% 로가장높았다. < 그림 4-20> 차량보유대수 2 전문가 전문가의주요이동수단은자가용자동차가가장많은 42% 를차지하였고, 대중교통이용이 42% 로자가용과유사한비율을차지하였다. 대중교통수단
191 제 4 장자율주행자동차윤리및운전자수용성조사 133 을좀더세분화하면버스를주로이용하는응답자는 15%, 지하철을주로이 용하는응답자 7% 인것으로나타났고, 버스와지하철을모두사용하는응답 자는 21% 인것으로나타났다. < 표 4-10> 전문가의주요이동수단 수단버스지하철버스 + 지하철 버스 + 지하철 + 자가용 자가용 ( 자동차 + 이륜차 ) 기타 ( 보도및자전거 빈도 백분율 15% 7% 21% 10% 42% 5% 100% 합계 전문가는통근을위해평균 29.25km를이동하는것으로나타났고, 평균이동시간은 분으로나타났다. 전문가는평균 1.11대의자동차를보유하고있으며, 1대를보유하고있다고한응답자는 62% 이고, 2대이상보유하고있다고한응답자는 25% 인것으로나타났다. < 표 4-11> 전문가자동차보유대수 보유대수 없음 1대 2대 합계 빈도 백분율 13% 62% 25% 100% 2) 교통사고경험 1 일반인최근 5년간교통사고경험이한번도없다는응답자가 70% 로지배적이며, 2번미만이약 24% 로나타났다. 이중운전자는 60.3% 비운전자는 84.3% 가교통사고경험이한번도없었다고응답했다. 반면운전자의경우 2번미만경험했다고한응답자가 30.5% 로나타나운전경험과교통사고경험은상호관계가높은것으로판단된다.
192 134 < 그림 4-21> 교통사고경험횟수 교통사고의주요사고원인에대답한응답자수는 205 명이며, 이중접촉사고 가 75.6%, 추돌과충돌사고가각각 13.2% 와 11.2% 인것으로나타났다. 또한, 주차시발생한사고가 13.2% 로나타났다. < 그림 4-22> 경험한교통사고의주요원인 ( 최근 5 년 ) 운전자의사고경험원인중접촉사고는 78% 이고, 주차시 15.1% 추돌사고 14.5% 로나타났고, 비운전자의접촉사고는 67.4% 로높게나타났다.
193 제 4 장자율주행자동차윤리및운전자수용성조사 전문가 최근 5 년간전문가의교통사고경험을물었을때한번도없었다는응답자 는 34% 로가장많았고 2 번미만이 42% 인것으로나타났다. < 표 4-12> 교통사고경험 ( 전문가 ) 사고수 한번도없음 2 번미만 2-3 번미만 3-4 번미만 4- 번미만 5 번이상합계 빈도 백분율 47% 42% 7% 1% 1% 1% 1 교통사고의주요원인을물었을때 35% 가접촉사고라고응답하여가장많 았고, 다음이추돌사고 14%, 주차시사고 11% 순으로나타나일반인사고와 비슷한경형을나타냈다. < 그림 4-23> 경험한교통사고의주요요인 ( 전문가 ) 3 영업용자동차운전자 최근 5 년동안교통사고경험을물었을때, 영업용차량운전자의최근 5 년
194 136 동안교통사고경험은 1 번이 48.2% 로가장높았으며, 이어서한번도없음 (23.2%), 2 번미만 (19.1%) 등의순으로나타났다. < 그림 4-24> 최근 5 년간교통사고경험 영업용차량운전자의세부전문분야별로살펴보면, 모든분야에서 1 번이 가장높았으며, 특히택시운전자및사업자가 50% 로가장높게나타났다. < 그림 4-25> 교통사고의주요원인
 기타특성 1 교통 ICT 이용경험 ( 일반인 ) 인터넷매체사용및공유서비스와같은새로운유형의교통서비스사용여부를물었을때응답자의 68.5% 가대중교통경로안내스마트폰앱을사용한경험이있다고응답하였고, 이동통신사에서제공하는네비게이션서비스를 56.9% 가사용하고있었다. 또한카카오택시, 우버택시등새로운매체를통해사용하는택시서비스를 49.6% 가이용하고있다고응답하였다.")
195 제 4 장자율주행자동차윤리및운전자수용성조사 137 교통사고의주요원인은접촉사고가 66.1% 로가장높았고, 이어서추돌사고 (17.3%), 전방주시태만 (15.5%), 안전거리불이행사고 (14.%) 등의순으로나타났다. 영업용차량운전자의경우접촉사고가가장높게나타났으며, 특히버스운전자및사업자가 76.2% 로가장높았다. 3) 기타특성 1 교통 ICT 이용경험 ( 일반인 ) 인터넷매체사용및공유서비스와같은새로운유형의교통서비스사용여부를물었을때응답자의 68.5% 가대중교통경로안내스마트폰앱을사용한경험이있다고응답하였고, 이동통신사에서제공하는네비게이션서비스를 56.9% 가사용하고있었다. 또한카카오택시, 우버택시등새로운매체를통해사용하는택시서비스를 49.6% 가이용하고있다고응답하였다. 그러나공유자동차와같은서비스의이용도는상대적으로낮은것으로조사되었다. < 그림 4-26> 교통관련 ICT 이용경험
196 138 운전자의경우대중교통경로안내스마트폰앱이 68.8%, 이동통신사제공네비게이션서비스 69.5%, 택시서비스 56.8% 등으로나타났고, 공유자동차이용경험도 17.5% 로비운전자에비해높게나타났다. 비운전자의경우운전자에비해교통 ICT 경험이다소낮은것으로판단된다. 대중교통경로안내서비스는 66.9% 로높았으나공유자동차이용경험은 4.0% 로상대적으로낮게나타났다. 공유자동차서비스와이동통신사제공네비게이션서비스는여성에비해더많은남성이사용한경험이있다고응답한반면, 카카오택시와스마트폰앱의경로안내는여성이더많이사용한다고응답하여, 남녀간에사용하는서비스의형태가다른것으로나타났다. 남성들은여성에비해좀더자립적인자동차이용보조서비스를사용한반면, 여성들은남성에비해수동적인서비스를더사용하고있는것으로판단된다. < 그림 4-27> 사용중인스마트폰 SNS 계정수 스마트폰의 SNS 계정수는평균 2 개이상을운영하고있으며, 3 개이상사용 한다는응답자도 25.7% 인것으로나타났다. 연령대별로, 60 대의경우평균 1.82 개의계정을사용하고있으며, 2 개이상이용한다는응답자도 38% 인것으
 전문가의교통서비스관련 ICT 이용경험을물었을때이동통신사네비게이션서비스와대중교통경로앱의이용이각각 32% 와 31% 로높게나타났다. 또한택시앱의이용은 25% 이고, 공유자동차이용이 12% 로나타났다. < 그림 4-28> 교통관련 ICT 이용경험 또한평균 SNS 이용계정수는 2.")
197 제 4 장자율주행자동차윤리및운전자수용성조사 139 로조사되었다. 20대의경우평균 2.7개의계정을사용하고있으며연령이증가할수록이용계정은줄어드는것으로나타났다. 또한운전자는평균 SNS 계정수는 2.48 개이고, 비운전자 1.86개보다많은것으로나타났다. 운전자의경우 2개의비율이 28.5%, 비운전자는 1개의비율이 34.7% 로높게나타났다. 2 교통 ICT 이용경험 ( 전문가 ) 전문가의교통서비스관련 ICT 이용경험을물었을때이동통신사네비게이션서비스와대중교통경로앱의이용이각각 32% 와 31% 로높게나타났다. 또한택시앱의이용은 25% 이고, 공유자동차이용이 12% 로나타났다. < 그림 4-28> 교통관련 ICT 이용경험 또한평균 SNS 이용계정수는 2.6 개로일반인과유사한수준으로조사되었 으며, 1 개이용하는응답자가 29%, 2 개이용하는응답자 29%, 그리고 3 개이 용하는응답자는 25% 로나타났다.

198 140 < 그림 4-29> SNS 이용계정수 3 의사결정성향 ( 일반인 ) 의사결정에대한성향을묻는질문에서나는팀프로젝트의리더가되기보다는다른사람을리더가되게한다를제외한모든성향항목에서운전자가비운전자보다인식점수가높았고, 운전자와비운전자모두나는스스로의사결정을하는편이다가각각 5.72점, 5.59점으로가장높게나타났다. 운전자의경우, 나는팀프로젝트의리더가되기보다는다른사람을리더가되게한다가 4.63점으로가장낮았고, 비운전자는음식점에서주문은내가주도적으로한다가 4.56점으로가장낮았다. 운전자및비운전자특성별자신의성향인식에대해살펴보면, 나는스스로의사결정하는편이다를제외한모든성향항목에서여자가남자보다점수가높았고, 나는스스로의사결정하는편이다라고한응답자는남자와여자가각 5.59점으로같았다.
 전문가의의사결정경향을살펴보면, 스스로의사결정을하는편이라고한전문가는")

199 제 4 장자율주행자동차윤리및운전자수용성조사 141 < 그림 4-30> 자신의성향인식 4 의사결정성향 ( 전문가 ) 전문가의의사결정경향을살펴보면, 스스로의사결정을하는편이라고한전문가는 88% 이고, 문제가발생하면직접나서서해결한다고한전문가는 87% 인것으로나타났다. 또한리커트평균점수는각각 5.87점과 5.68 점으로로나타났다. < 그림 4-31> 의사결정성향 ( 전문가 )

200 142 팀의리더가되기보다는다른사람을리더가되게한다의리커트평균점수는 4.05 점으로전문가의 35% 는잘맞는다고응답했고, 33% 는보통이라고응답했다. 반면, 자신이리더가된다라고한응답자는 32% 로나타나일반인운전자 13.6%, 일반인비운전자 11.6% 와비교하여다소차이가있는것으로보여교육수준과소득수준을감안할때전문가들이다소리더십이높은것으로판단해볼수있다. 음식점에서주문은내가주도적으로한다에대한리커트평균점수는 4.56 점으로응답자의 56% 는잘맞는다고응답했고, 보통이라는의견이 26%, 그렇지않다고한의견은 18% 로나타났다. 나. 수용성설문결과 1) 자율주행기능별수용성 1 현재장착자율주행기능현재사용하고있는자동차에장착된자율주행기능에대해묻는질문에일반인운전자의약 55% 의응답자들이자율주행기능이없다고응답하였고, 20% 가 ABS 브레이크, 약 24% 가미끄럼방지시스템을장착하고있다고응답했다. < 그림 4-32> 현재이용차량의장착기능 ( 일반인 )
 2 자율주행기능장착의사현재사용하고있는자동차에자율주행기능을장착할의사가있는가에대한물음에전반적으로장착의사가긍정적인경우가그렇지않은경우보다높은것으로나타났다. 자동제어장치를장착할의사가있는가에대한질문에일반인운전자의 65% 가긍정적인답을했고 12.6% 가부정적인답을하였으며, 22.")
201 제 4 장자율주행자동차윤리및운전자수용성조사 143 반면전문가들은 7% 만이장착기능이없다고응답하였다. 전자식주행안전 화콘트롤기능을장착한전문가는 26% 로가장많아고, 다음이미끄럼방지 시스템으로 25% 가장착하였다. < 그림 4-33> 현재이용차량의장착기능 ( 전문가 ) 2 자율주행기능장착의사현재사용하고있는자동차에자율주행기능을장착할의사가있는가에대한물음에전반적으로장착의사가긍정적인경우가그렇지않은경우보다높은것으로나타났다. 자동제어장치를장착할의사가있는가에대한질문에일반인운전자의 65% 가긍정적인답을했고 12.6% 가부정적인답을하였으며, 22.1% 는모른다는답을하여자동제어장치에대한수용성은높게나타났다. 적응식정속주행시스템의장착의사는 45.7% 가긍정적인답을하였고, 17.6% 는부정적인견해를보였으며, 36.7% 는보통이라고답하여, 아직까지이기술에대한의견이변경될여지가많은것으로나타났다.

202 144 < 그림 4-34> 차량기능별장착의사및지불의향가격 운전자의차량기능별장착의향점수는전방충동경고시스템이 5.51 점으로가장높았고, 이어서자동주차시스템 5.16점, 차선이탈경고시스템 5.14 점, 자동제동장치 5.11점등의순으로나타났다. 반면, 적응식정속주행시스템의장착의향점수는 4.59점으로낮았다. 운전자의차량기능별지불의향가격은자동주차시스템이 41.5만원으로가장높았고, 이어서자동제동장치 34.3만원, 전방충돌경고시스템 32.4만원등의순으로나타났다. 반면, 과속방지시스템은 23만원으로가장낮은금액으로나타났다. 여성운전자의자동제동장치장착의향점수는 5.17점이고, 남성은 5.06점으로나타났고, 미혼자보다는기혼자의장착의사가높았다. 지불의향금액은남자가평균 40.8만원으로여자 (27.9만원) 보다높았고, 미혼자가 41.2만원으로기혼자 (31.0만원) 보다높게나타났다. 월평균가구소득별로살펴보면, 자동제동장치장착의향점수는 600만원이상에서 5.27점으로가장높았고, 지불의향금액은 200만원미만에서 48.8만원으로가장높았다. 남성운전자의적응식정속주행시스템장착의향점수는 4.62점으로여자
203 제 4 장자율주행자동차윤리및운전자수용성조사 145 (4.56점 ) 보다높았고, 기혼자가 4.62점으로미혼자 (4.52점 ) 보다높았다. 지불의향금액은남자가평균 29.4만원으로여자 (27.1 만원 ) 보다높았고, 미혼자가 35.8만원으로기혼자 (24.6만원) 보다높게나타났다. 월평균가구소득별적응식정속주행시스템장착의향점수는 200~299만원에서 4.67점으로가장높았고, 지불의향금액은 200만원미만에서 46.4만원으로가장높았다. 여성운전자의차선이탈경고시스템장착의향점수는 5.17점으로남자 (5.12점 ) 보다높았고, 기혼자가 5.15점으로미혼자 (5.13점 ) 보다약간높았다. 지불의향금액은남자가평균 28.5원으로여자 (24.0 만원 ) 보다높았고, 미혼자가 33.3만원으로기혼자 (22.8만원) 보다높게나타났다. 월평균가구소득별차선이탈경고시스템장착의향점수는 600만원이상에서 5.31점으로가장높았고, 지불의향금액은 200만원미만에서 45.4만원으로가장높았다. 여성운전자의전방충돌경고시스템장착의향점수는 5.52점으로남자 (5.50점 ) 보다약간높았고, 미혼자가 5.52점으로기혼자 (5.50점 ) 보다약간높았다. 지불의향금액은남자가평균 35.9 만원으로여자 (28.9만원) 보다높았고, 미혼자가 37.9만원으로기혼자 (29.7만원) 보다높게나타났다. 월평균가구소득별전방충돌경고시스템장착의향점수는 500~599만원에서 5.72점으로가장높았고, 지불의향금액은 200만원미만에서 49.6만원으로가장높았다. 여성운전자의과속방지시스템장착의향점수는 4.96 점으로남자 (4.55점 ) 보다높았고, 기혼자가 4.81 점으로미혼자 (4.64점 ) 보다높았다. 지불의향금액은남자가평균 24.1만원으로여자 (21.8만원) 보다높았고, 미혼자가 28.3만원으로기혼자 (20.4만원) 보다높게나타났고, 월평균가구소득별과속방지시스템장착의향점수는 200~299만원에서 5.06점으로가장높았고, 지불의향금액은 200만원미만에서 47.3만원으로가장높았다. 여성운전자의지능형속도조정시스템장착의향점수는 4.79점으로남자 (4.78점 ) 보다약간높았고, 기혼자가 4.87점으로미혼자 (4.60점 ) 보다높았다. 지불의향금액은남자가평균 35.2만원으로여자 (27.1 만원 ) 보다높았고, 미혼자가 35.4만원으로기혼자 (29.0만원) 보다높게나타났다. 월평균가구소득별
 보다높았고, 미혼자가 48.5만원으로기혼자 (38.1 만원 ) 보다높게나타났다. 월평균가구소득별과속방지시스템장착의향점수는 600만원이상에서 5.33 점으로가장높았고, 지불의향금액은 200만원미만에서 53.0만원으로가장높았다.")
204 146 지능형속도조정시스템장착의향점수는 600만원이상에서 5.00점으로가장높았고, 지불의향금액은 200만원미만에서 47.1만원으로가장높았다. 여성운전자의자동주차시스템장착의향점수는 5.32점으로남자 (4.01점 ) 보다높았고, 미혼자가 5.21점으로기혼자 (5.13 점 ) 보다높았다. 지불의향금액은남자가평균 48.8만원으로여자 (34.2만원) 보다높았고, 미혼자가 48.5만원으로기혼자 (38.1 만원 ) 보다높게나타났다. 월평균가구소득별과속방지시스템장착의향점수는 600만원이상에서 5.33 점으로가장높았고, 지불의향금액은 200만원미만에서 53.0만원으로가장높았다. 전문가는전방충돌경고시스템 (80%), 자동제어장치 (77%), 차선이탈경고시스템 (74%), 적응식주행시스템 (67%) 순으로장착의사를보였다. 반면, 과속방지시스템에대한장착의사가가장낮아 42% 의전문가만이장착의사가있다고응답했고, 34% 는장착의사가없다고응답했고, 24% 는잘모르겠다고응답하였다. 또한자동주차시스템에대해서 59% 의전문가가장착의사가있다고응답했고, 28% 는장착의사가없다고응답했으며 13% 만이잘모르겠다고응답했다. < 그림 4-35> 자율주행기능장착의사 ( 전문가 )
205 제 4 장자율주행자동차윤리및운전자수용성조사 147 자율주행기능별평균지불의사가격은자동제동장치에대한가격이가장높아 39.38만원으로조사되었고, 자동주차시스템은 37.2만원으로조사되었다. 반면, 과속방지시스템의경우가장낮아 만원으로조사되었고, 차선이탈경고시스템이 만원, 지능형속도조정시스템이 23.8만원으로조사되었다. 최대지불의사는자동주차시스템이 200만원으로조사되었고, 과속방지시스템이가장낮은 70만원으로조사되었다 < 표 4-13> 자율주행기능별장착의사가격 ( 전문가 ) 비고 평균지불의사가격 ( 만원 ) 최대지불의사가격 ( 만원 ) 자동제동장치 적응식정속주행시스템 차선이탈경고시스템 전방충돌경고시스템 과속방지시스템 지능형속도조정시스템 자동주차시스템 ) 단계별및수단별자율주행자동차수용성 1 3단계자율주행자동차장착및이용의사부분자율주행자동차인 3단계자율주행자동차의이용의사를물었을때 51.9% 의일반인응답자들이긍정적인답을하였다. 기능별장차의사를살펴보면, 연비를최소화할수있는주행기능이 55.7% 로가장높았으며, 이어서목적지까지의주행경로선택가능 50.9%, 운행중특정사건발생시운전자에경고하는방식 44.0% 등의순으로나타났다. 반면, 도시부도로및고속주행시속도제한기능은 21.1% 가장낮게나타났다.


206 148 < 그림 4-36> 3 단계자율주행자동차장착의향기능 ( 일반인 ) 전문가의경우운행중특정사건발생시운전자에게경고하는기능장착의사가 67% 로가장높았고다음이목적지까지의주행경로선택기능이 58% 로높게나타났다. 가장낮은선호도를보인기능은운행제한속도를잘준수할수있도록하는기능으로 21% 만이장착의사를보였고, 도시내도로및고속도로주행시속도제한기능은 25% 로낮게나타났다. 규정속도로제한할수있는자동기능에대한선호가일반인과전문가모두낮게나타나는경향을보인것으로판단된다. < 그림 4-37> 3 단계자율주행자동차장착의향기능 ( 전문가 )

207 제 4 장자율주행자동차윤리및운전자수용성조사 149 3단계자율주행자동차전반에대한이용의사는상대적으로자율주행자동차에대한지식이높은전문가 94) 의이용의사가높게나타났다. 일반인운전자의 53% 및비운전자의 50% 는이용의사가있다고응답했고, 일반인운전자의 34% 및비운전자의 33% 는잘모르겠다고응답하였다. 반면전문가의 68% 는 3단계자율주행자동차의이용의사가있다고긍정적인응답을하였고, 19% 만이잘모르겠다는응답을하였다. 특히, 전문가의 29% 는자율주행자동차의이용의사가매우높다고응답하여일반인에비해높은선호를보이고있다. < 그림 4-38> 3 단계자율주행자동차이용의사비교 2 4단계완전자율주행자동차이용의사완전자율주행자동차이용의사도 3단계와유사한경향을보이고있는데, 일반인에비해전문가의이용의사가높게나타났다. 일반인운전자의 56% 와비운전자 51% 가완전자율주행자동차이용의사가있다고응답한반면전문가의경우 67% 가이용의사가있다고밝혔다. 또한일반인운전자의 29%, 비운전자 94) 본조사에서는자동차및교통분야기술및정책전문가를대상으로조사하여일반인에비해자율주행자동차에대한지식이상대적으로많다고볼수있다.

208 150 31% 는이용에대해잘모르겠다고응답한반면, 전문가의경우 10% 만이잘모르겠다고응답했다. 그러나완전자율주행자동차를이용하지않겠다고한일반인운전자는 16% 이고비운전자는 17% 인반면, 전문가의 23% 가이용하지않겠다고응답하였다. 전문가의경우완전자율주행자동차에대한정보가더많기때문에중립적인인식보다는이용의사가높은경향이나타난것으로판단해볼수있다. 그러나전반적으로완전자율주행자동차에대한긍정적인입장의전문가가더많은것으로나타나전문가의 27% 가완전자율주행자동차이용의사가매우높은것으로응답했다. < 그림 4-39> 완전자율주행자동차이용의사 3 완전자율주행버스이용의사 완전자율주행버스이용의사를물었을때일반인운전자혹은비운전자에 비하여전문가의이용의사가높은것으로조사되었다. 일반인운전자의경우

209 제 4 장자율주행자동차윤리및운전자수용성조사 151 자율주행버스이용의사는 35% 이고, 비운전자의경우 27% 인데비해문가의이용의사는 48% 로타나났다. 한편, 이용하지않겠다는부정적인견해는일반인운전자의경우 29%, 비운전자의경우 25% 로나타났고, 전문가도 31% 로나타나일반인과큰차이를보이지않았다. 반면, 보통이라는중립적인의견은일반인운전자의경우 37%, 비운전자 41%, 그리고전문가의경우 22% 로나타났다. 이러한결과는완전자율주행자동차이용의사와달리아직잘모르겠다고한응답자가높은것으로나타나완전자율주행버스에대한인지가낮은것으로평가할볼수있다. < 그림 4-40> 자율주행버스이용의사비교 4 완전자율주행택시이용의사또다른형태의대중교통수단으로자율주행택시에대한이용의사를물었을때이용하겠다는의견보다는보통이라는중립적인의견과이용하지않겠다는의사가더높게나타났다. 일반인운전자의 33%, 비운전자의 26% 가이용의사가있다고응답했고, 전

210 152 문가의경우 37% 가이용의사가있다고응답했다. 반면, 보통이라는중립적인의견은일반인운전자 32%, 비운전자가 36% 인것으로나타났고, 전문가는자율주행버스이용과동일하게 22% 인것으로조사되었다. 한편, 이용하지않겠다고한의견은일반인운전자가 36% 이고, 비운전자는 38% 로조사되었고, 전문가의경우 41% 로가장높게나타났다. < 그림 4-41> 완전자율주행택시이용의사비교 5 공유자율주행자동차이용의사자율주행자동차를구매하여이용하는경우와공유로이용하는경우를비교해보았다. 자율주행자동차구매시이용빈도는일반인운전자 220명중평소와똑같이이용하겠다는응답자가 56%, 더이용하겠다는응답자가 28% 로나타났다. 일반인비운전자 144명중평소와같이이용하겠다는응답자는 56%, 평소보다더자주이용하겠다는응답자는 26% 로나타났다.

211 제 4 장자율주행자동차윤리및운전자수용성조사 153 < 그림 4-42> 자율주행자동차소유시예상이용빈도비교 전문가의경우평소와똑같이이용하겠다는응답자는 51%, 평소보다더자주이용하겠다는응답자는 12% 로나타났다자율주행자동차를공유로이용할것인가를물었을때일반인운전자의 45% 가이용하겠다고한반면비운전자의 36% 와전문가 37% 만이이용하겠다고응답하여일반인운전자보다낮게나타났다. 반면이용하지않겠다고응답한전문가는 40% 인데반하여일반인운전자의 23% 와비운전자 26% 가이용하지않겠다고하여전문가보다낮게나타났다. 또한보통이라고중립적인의사를보인일반인운전자는 32% 이고비운전자는 37% 인것으로나타났고전문가는 23% 만이중립적인의견을보였다.

212 154 < 그림 4-43> 자율주행자동차공유이용의사 2) 자율주행자동차인식자율주행자동차에대한인식은안전, 이동목적부합, 이동효율, 사고감소, 연비, 편의, 개인정보, 이동약자배려의항목에대해조사하였다전반적으로부정적인인식보다는긍정적인인식이높은것으로조사되었으나보통이라고한응답이높게나타나고있어아직까지자율주행자동차에대한인식이명확하게설정된것은아닌것으로판단된다. 1 안전한이동목적부합자율주행자동차를이용하여목적지까지안전하게이동할수있는가에대한질문에일반이운전자의 46% 는긍정적으로응답했고, 31% 는보통이라는중립적인인식이있는것으로조사되었다. 비운전자의경우 39% 의응답자들이긍

213 제 4 장자율주행자동차윤리및운전자수용성조사 155 정적으로인식하고있으며 42% 는보통이라는중립적인인식을하고있는것으로나타났다. 전문가의경우 61% 가긍정적으로인식을하고있으며 21% 는보통이라는중립적인의견을보였다. 그러나직업운전자의경우 21% 만이긍정적인응답을하였고 31% 는중립적인인식을하고있는것으로나타났다. 직업운전자들은일반인과전문가에비해자율주행자동차를이용한이동에대해부정적으로인식하고있는것으로나타났다. 일반인운전자의 23%, 비운전자의 22%, 그리고전문가의 18% 만이부정적인인식을하고있었으나직업운전자의경우 46% 가부정적인인식을하고있는것으로나타났다. < 그림 4-44> 목적지까지의안전한이동가능성에대한인식 자율주행자동차가나의가족을안전하게목적지까지이동시켜줄수있을 것인가에대한인식을살펴보았을때일반인과전문가에비해직업운전자들이 부정적인인식을하고있는것으로나타났다.
214 156 일반인운전자는자율주행자동차가가족을안전하게목적지까지이동시켜줄수있을것인가에대해 41% 가긍정적으로응답하였고, 29% 는보통이라는중립적입장을보였다. 비운전자의경우 35% 가긍정적으로 37% 는중립의의견을보였다. 또한전문가의경우 47% 가긍정적으로 26% 는중립의의견을보였다. 그러나직업운전자의경우 25% 가긍정적으로 25% 가중립의의견을보였다. 부정적인의견은일반인운전자 29%, 비운전자 25%, 전문가 27% 를보인반면직업운전자의과반수인 51% 가부정적인인식을하고있는것으로나타났다. < 그림 4-45> 가족의안전한이동가능성에대한인식 자율주행자동차의안전한이동목적달성에대한의견에서자신의이동목적달성과가족의이동목적달성을비교해보면, 가족의경우보수적인응답을하고있는것으로나타났다. 일반인운전자의경우부정적인의견변화는 23% 에서 29% 로 4% 가증가하였고, 비운전자의경우 22% 에서 28% 로 6% 증가하
215 제 4 장자율주행자동차윤리및운전자수용성조사 157 였다. 전문가의경우 18% 에서 27% 로 9% 증가하였고직업운전자의경우도 5% 증가하였다. 2 효율성자율주행자동차의성능의효율적운행과그에따른연비개선효과와운전자의시간활용성개선에관한사항을조사하였다. 자율주행자동차성능의효율적운행과관련하여복잡한시내도로이동을효율적으로할것인가에대한인식에서일반인운전자와비운전자, 전문가와직업운전자의인식이다소차이를나타내고있다. 직업운전자가가장보수적인인식이있는반면일반인운전자는다소긍정적인인식을가지고있는것으로나타났다. < 그림 4-46> 도시부도로의효율적이동가능성

216 158 일반인운전자의 45% 는시내도로이동을효율적으로할것이라고긍정적인인식을보이고있고 25% 는보통이라는중립적인인식을가지고있으며, 30% 는부정적인인식을가지고있는것으로나타났다. 일반인비운전자의 36% 는보통이라는중립적인인식을보였고, 33% 는긍정적인인식, 그리고 30% 는부정적인인식을보였다. 전문가의경우 31% 는긍정적으로인식하고있고, 26% 는중립의인식을, 그리고 43% 는부정적인인식을가지고있는것으로나타났다. 또한직업운전자의경우 57% 가부정적인인식을가지고있고, 23% 는중립, 그리고 18% 만이긍정적으로인식하고있어다른조사대상그룹과비교할때가장보수적인것으로나타났다. 전반적으로자동차에대한전문지식과경험이높은그룹에서자율주행자동차의시내통행에대해비관적인인식이있는것으로판단된다. 차량연비개선효과에대한인식에서일반인운전자와비운전자및직업운전자에비해전문가그룹이가장긍정적인인식을가지고있는것으로나타났다. < 그림 4-47> 차량연비개선

217 제 4 장자율주행자동차윤리및운전자수용성조사 159 일반인운전자의경우 53% 는긍정적인인식을보이고있고, 31% 는보통이라는중립적인식을그리고 16% 만이부정적인식을가지고있는것으로나타났다. 비운전자의경우 45% 가긍정적인인식을보이고있고, 39% 는부정적인식을, 그리고 17% 는부정적인인식을보이고있다. 반면, 전문가그룹의경우 71% 가긍정적인의견을보여비교대상그룹중가장긍정적인인식을가지고있는것으로나타났다. 또한 16% 는중립적인입장을, 그리고부정적인인식은 12% 만이가지고있는것으로나타났다. 직업운전자의 34% 는자율주행자동차의연비개선효과에대해긍정적으로인식하고있고, 30% 는중립적으로인식하고있으며, 35% 는부정적으로인식하고있는것으로나타났다. 시간의효율적활용에대한인식은향후자율주행자동차이용자의편익항목가운데가장중요한역할을할것으로판단된다. 전반적으로운전자와비운전자는긍정적으로인식하고있는반면전문가와직업운전자의경우부정적인인식을하고있는응답자가더많은것으로나타났다. < 그림 4-48> 시간의효율적활용
218 160 일반인운전자의 53% 와비운전자의 43% 는자율주행자동차로이동하는동안업무, 독서, 대화등좀더효율적으로다른일을할수있을것으로기대하고있는것으로나타난반면, 전문가의 31% 와직업운전자의 18% 만이긍정적으로인식하고있는것으로나타났다. 일반인운전자의 25% 와비운전자 28%, 전문가 26% 그리고직업운전자 23% 는중립적인입장을보이고있어큰차이를보이지않고있다. 반면일반인운전자의 22% 와비운전자의 29%, 전문가 43% 와직업운전자의 57% 는자율주행자동차운행으로이용자의시간활용에있어효율성이증대되지않을것에비관적인인식을하고있는것으로나타났다. 특히전문가와직업운전자의경우일반인에배해두배가량많은응답자들이비관적인인식을하고있는것으로나타났다. 3 자동차안전자율주행자동차이용목적의가장중요한편익인교통사고감소효과와자동차이용약자인무면허자, 고령자및시각장애인의단독이용가능성에대한인식을조사하였다. 자율주행자동차이용의가장중요한긍정적논거로제시되고있는교통사고감소효과에대한일반인, 전문가, 직업운전자들의의견을살펴본결과전문가가가장긍정적으로인식하고있으며, 직업운전자들이가장부정적인인식으로하고있는것으로나타났다. 자율주행자동차의교통사고발생감소효과에대해일반인운전자의 43%, 비운전자의 40% 가긍정적으로인식하고있고, 31% 는중립적으로인식하고있는것으로나타났다. 전문가의 67% 가자율주행자동차의교통사고발생감소효과에대해긍정적인기대를하고있는반면, 직업운전자의 25% 만이긍정적으로인식하고있는것으로나타났다.

219 제 4 장자율주행자동차윤리및운전자수용성조사 161 < 그림 4-49> 교통사고발생감소 반면부정적인견해는전문가가가 15% 로가장낮았고, 직업운전자가 49% 로가장높았다. 일반인운전자의 26% 와비운전자 28% 가교통사고발생감소효과에대해부정적으로인식하고있는것으로나타났다. 자동차이용약자인무면허자, 고령운전자및시각장애인이자율주행자동차를단독으로이용할수있는가에대한인식을통해자율주행자동차의안전성에대한신뢰를살펴보고자하였다. 일반인운전자와비운전자, 전문가에비해직업운전자는다소부정적인견해를보이고있고, 전문가가가장긍정적인견해를보이고있는것으로나타났다. 일반인운전자의 41% 와비운전자의 35% 는자동차이용약자단독으로운행하는것에대해긍정적으로인식하고있는것으로나타났다. 전문가의 48% 가긍정적인인식을하고있는반면직업운전자의 20% 만이자동차이용약자의자율주행자동차단독이용을긍정적으로인식하고있는것으로나타났다.
220 162 < 그림 4-50> 무면허자 / 고령운전자 / 시각장애인의이용 직업운전자의경우가장많은 61% 의응답자들이자동차이용약자의자율주행자동차단독이용을부정적으로인식하고있는것으로나타났고, 전문가의 31%, 일반인운전자의 36% 와비운전자 33% 가부정적인인식을하고있는것으로나타났다. 전반적으로교통사고발생감소효과에대한기대가자동차이용약자의이용편의증진효과에대한기대치에비해높은것으로나타나, 아직까지자율주행자동차기술에대한신뢰가높지않은것으로판단해볼수있다. 4 개인정보공유자율주행자동차이용시에발생하는개인위치정보를주변다른차량과공공데이터베이스에제공하는것에대해전문가가가장긍정적인인식을보인반면, 직업운전자가가장부정적인인식을보였다. 또한일반인비운전자의경우보통이라는중립적인의견이가장많은것으로나타났다.

221 제 4 장자율주행자동차윤리및운전자수용성조사 163 < 그림 4-51> 개인정보제공 전문가의 48% 는개인위치정보제공에대한거부감이없는것으로나타났고, 22% 는중립적인입장을, 32% 는거부감이있는것으로조사되었다. 일반인운전자의 39% 와비운전자 30%, 직업운전자 33% 만이거부감이없는것으로나타났고, 운잔자 30%, 비운전자 29% 는거부감이있는것으로조사되었다. 특히직업운전자 37% 는개인위치정보를제공하는것에거부감이있는것으로조사되었다. 한편, 일반인비운전자의 41% 는개인정보제공에대해보통이라는중립적인식을하고있는것으로나타났고, 전문가의경우 22% 만이중립적인인식을하고있는것으로나타났다. 3) 자율주행자동차운행시장점과우려사항 자율주행자동차운행의장점을물었을때일반인운전자의 51%, 비운전자 의 55% 및전문가의 63% 는운전중졸음과운전미숙으로인해발생할수있
222 164 는실수예방을통해교통사고발생이감소될것으로꼽았다. 이러한견해는자율주행자동차인식결과와유사한경향을보인다고할수있다. 전문가의 15% 는차량을운행하는동안다른활동을할수있다는것을가장큰장점으로꼽았고, 일반인운전자의 20% 와비운전자 19% 는초보운전자및고령운전자의차량운행편의제고에도움이될것이라고응답했다. < 그림 4-52> 자율주행자동차운행의장점 자율주행자동차운행으로인한우려사항에대한의견은전문가와일반인의의견에다소차이가있는것으로나타났다. 전문가의경우가장큰우려사항으로 26% 가자율주행시스템의고장으로인한교통사고발생을꼽았고, 26% 는사고발생시책임소재구분이모호하다고꼽았으며, 22% 는자율주행자동차운행지원인프라등주변환경구축이부족하다고꼽았다. 반면일반인운전자의과반수 (51%) 와비운전자 44% 는자율주행시스템고장으로인한교통사고의위험증가를우려한것으로나타났고, 15% 는사고발생시책임소재의구분이
223 제 4 장자율주행자동차윤리및운전자수용성조사 165 모호한것을우려사항으로꼽았다. 또한일반인운전자의 20% 는위치정보및 자동차운생시발생하는다양한개인정보유출을우려한것으로나타났다. < 그림 4-53> 자율주행자동차운행시우려사항 이러한결과를종합해볼때전반적으로자율주행자동차의운행으로인적요소로인해발생할수있는교통사고를예방할수있는장점이있으나, 아직까지자율주행시스템에대한신뢰는약한편으로시스템오작동으로인한교통사고를우려하고있는것으로나타났다. 또한자율주행자동차사고발생시책임소재에대한재정립이필요한것으로판단해볼수있다. 4) 완전자율주행자동차와의도로공용이용에대한의견향후완전자율주행자동차의운행시도로를공유하게될일반자동차운전자와보행자들의자율주행자동차에대한수용성을알아보기위한설문을진행하였다.

224 166 1 다른차와구별유무완전자율주행자동차가공용도로를운행할경우다른차와구별될필요가있는가에대한질문에일반인운전자 82%, 비운전자 80%, 직업운전자 80% 는구별이필요하다고답하였다. 다만전문가집단의경우다른그룹과차이를보여 71% 의응답자가구분이필요하다고응답했으나, 그차이는크지않은것으로나타났다. < 그림 4-54> 공용도로운행시다른차와구별필요 2 도시내부운행과별도차선또한자율주행자동차가도시내부도로를운전자없이운행할수있는가에대한질문에일반의 60% 이상은운행할수없다고응답하였다. 또한전문가의경우 56% 의응답자들이아직까지자율주행자동차가도시내부를운전자없이운행하는것에비관적인입장을보였다. 이러한입장은아직까지자율주행자동차기술이복잡한환경의도시내부도로를운행하는것이어려울것이라는견해가반영된것으로판단된다.

225 제 4 장자율주행자동차윤리및운전자수용성조사 167 이번에는질문을바꿔자율주행자동차만의전용차선이필요한가를물었을 때일반인운전자의 63%, 비운전자 64%, 직업운전자 57%, 전문가 46% 는전용 차선이필요하다고응답하였다. < 그림 4-55> 도시내부도로운행가능성과전용차선필요여부 3 완전자율주행자동차대면시대응또한자율주행자동차를공공도로에서마주했을때반응을묻는질문에서일반인운전자의 37%, 비운전자의 34%, 전문가 38%, 그리고직업운전자의 50% 가나와가까워지지않도록노력하겠다고응답하였다. 또한일반인운전자 28% 및비운전자 41%, 전문가 23%, 그리고직업운전자 26% 가잘모르겠다고응답하였다. 특히직업운전자들은다른조사그룹에비해보수적인응답을한것으로나타났다. 반면, 전문가의경우자율주행자동차에대한호기심이상대적으로높은것으로나타났다. 전문가의 33% 는잠시뒤따라가보는등의반응을보이겠다고응답하였다. 반면, 직업운전자는다소소극적인반응을보여응답자의 50% 가가까워지지않겠다고응답하였다.

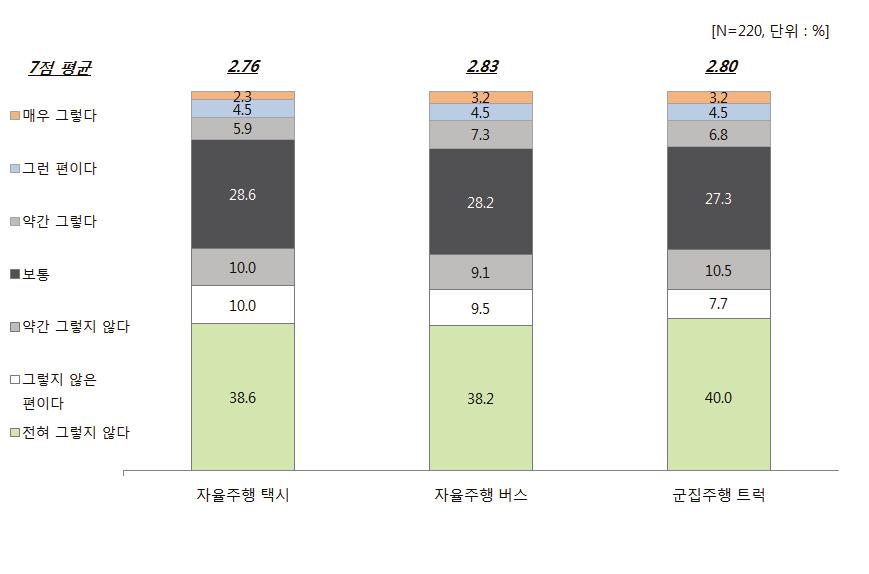
226 168 < 그림 4-56> 공도로에서자율주행자동차를마주했을때반응 5) 상용자동차운전자의자율주행자동차운행의사자율주행택시, 버스및군집주행트럭과같은영업용자율주행자동차의운행의사를물었을때자율주행버스의운행의사점수가 2.83으로가장높은반면, 자율주행택시는 2.76 으로가장낮았다. < 그림 4-57> 자율주행택시, 버스, 군집주행트럭운행의사

227 제 4 장자율주행자동차윤리및운전자수용성조사 169 또한 3단계자율주행기능이장착된차량을배차했을경우운행요령을익힐의사가있는가에대한질문에서전체응답자의 57.3% 가운행요령교육을받을의사가있는것으로나타났다. 세부분야별로살펴보면, 택시운전자및사업자의운행요령교육의사가 59% 로높게나타났고, 버스운전자및사업자의의사는 53.3% 로낮게나타났다. < 그림 4-58> 3 단계자율주행기능차량운행요령교육의사
228 170 제 4 절자율주행자동차이용모형개발 가. 변수설정 자율주행자동차이용요인을분석하기위하여자율주행기술단계및수단별로자율주행자동차이용모형을개발하였다. 자율주행자동차의이용의사에영향을미치는변수로인구통계적특성변수 4개 ( 성별, 연력, 소득, 종교의유무 ), 교통특성변수 3개 ( 주이용교통수단, 자동차보유대수, 교통사고경험 ), 교통관련 ICT 이용관련변수 4개와자동차장착기능특성 7개변수등총 18 변수로설정하였다. < 표 4-14> 변수설정 ( 일반인대상 ) 구분 변수명 단위 변수설명 종속변수 자율주행자동차이용의향 - 이용의향 (100점만점 ) 성별 (Gender) 더미 1 = 남자, 0 = 여자 연령 (Age) 세 만연령 인구 교육수준 (Edu) 더미 1 = 대졸이상 0 = 대졸미만 통계적 1 2백만원미만 2 2-3백만원미만 특성 월평균가구소득 (Income) 등급 3 3-4백만원미만 4 4-5백만원미만 5 5-6백만원미만 6 6백만원이상 종교유무 (Religion) 더미 1 = 있음, 0 = 없음 주이용교통수단 (T_mode) 더미 1 = 자가용이용자, 0 = 대중교통이용자 교통 자동차보유대수 (N_Car) 대 보유차량의대수 관련 1 한번도없음 2 2번미만 특성 교통사고경험 (N_TA) 등급 3 2-3번미만 4 3-4번미만 5 4-5번미만 6 5번이상독립공유자동차이용경험 (ICT1) 변수 ICT 이용관련특성 자동차장착기능특성 카카오택시, 우버택시등이용경험 (ICT2) 대중교통경로안내스마트폰엡이용경험 (ICT3) 이동통신사제공네비게이션서비스이용경험 (ICT4) ABS 브레이크 (Car_opt1) 전자식주행안정화콘트롤 (Car_opt2) 적응식정속주행시스템 (Car_opt3) 장애물감지시스템 (Car_opt4) TCS(Car_opt5) 차로이탈경고시스템 (Car_opt6) 자동주차 (Car_opt7) 더미 더미 1 = 있음, 0 = 없음 1 = 장착, 0 = 비장착
229 제 4 장자율주행자동차윤리및운전자수용성조사 171 나. 기술단계별이용모형 1) 완전자율주행자동차이용모형일반인을대상으로한조사결과를바탕으로다중회귀분석을실시하였다. 완전자율주행자도차이용의향에영향을미치는변수는성별, 연령, 소득, 종교, 교통사고경험, 교통ICT 이용여부, ABS 브레이크, 적응식정속주행시스템, 장애물감지시스템유무가영향을미치는것으로분석되었다. < 표 4-15> 완전자율주행자동차이용의향에대한모형적합도 R R 제곱 수정된 R 제곱 < 표 4-16> 완전자율주행자동차이용의향모형 비표준화계수표준화계수유의공선성통계량 t B 표준오차베타확률공차 VIF Gender Age Income Religion N_TA ICT ICT Car_opt Car_opt Car_opt ) 3단계자율주행자동차이용모형 3단계자율주행자동차이용의사에영향을미치는변수는성별, 연령, 소득, 종교, 교통사고경험, 교통 ICT 이용경험, 그리고장애물감지시스템장창여부가영향을미친것으로분석되었다.
230 172 < 표 4-17> 3 단계자율주행자동차이용의양모형적합도 R R 제곱수정된 R 제곱 < 표 4-18> 3단계자율주행자동차이용의향모형 비표준화계수표준화계수공선성통계량 t 유의확률 B 표준오차베타공차 VIF Gender Age Income Religion N_TA ICT ICT Car_opt 다. 수단별이용의향모형 1) 완전자율주행택시일반인을대상으로한자율주행택시이용의향에영향을미치는변수는연령, 종교, 교통사고경험, 교통 ICT 이용여부. 적응식정속주행시스템, 장애물감지시스템, 차로이탈경고시스템을장착유묵영향을미치는것으로분석되었다. < 표 4-19> 자율주행택시이용의향모형 R R 제곱 수정된 R 제곱
231 제 4 장자율주행자동차윤리및운전자수용성조사 173 < 표 4-20> 완전자율주행택시이용의향모형 비표준화계수표준화계수유의확공선성통계량 t B 표준오차베타률공차 VIF Age Religion N_TA ICT ICT Car_opt Car_opt Car_opt ) 완전자율주행버스일반인을대상으로한자율주행버스이용의사에영향을미치는변수는성별, 연령, 종교, 교통사고유무, ICT 이용경험, ABS 브레이크및자동주차기능장책여부인것으로분석되었다. < 표 4-21> 자율버스이용의향모형적합도 R R 제곱 수정된 R 제곱 < 표 4-22> 자율주행버스이용의향모형 비표준화계수표준화계수유의공선성통계량 t B 표준오차베타확률공차 VIF Gender Age Religion N_TA ICT ICT Car_opt Car_opt
232 174 3) 자율주행자동차공유이용모형자율주행자동차공유이용에영향을미치는변수는성별, 연령, 교통사고유무, 교통 ICT 이용경험, ABS 브레이크장착여부, 차로이탈경고시스템장착여부인것으로분석되었다. < 표 4-23> 자율주행자동차공유이용의향모형적합도 R R 제곱 수정된 R 제곱 < 표 4-24> 자율주행자동차공유이용모형 비표준화계수표준화계수유의공선성통계량 t B 표준오차베타확률공차 VIF Gender Age N_TA ICT ICT Car_opt Car_opt
233 제 4 장자율주행자동차윤리및운전자수용성조사 175 제 5 절윤리실험및수용성조사의시사점 1. 윤리실험의시사점 자율주행자동차윤리실험은자율주행자동차가도로운행중직면하게될윤리딜레마상황에서의자동차거동알고리즘을프로그램하기위한사회적합의도출이필요하다는점에서시작하였다. 딜레마상황이라는것은자율주행자동차사고상황에서중요한의사결정을해야할때, 어느한쪽을기준으로결정하기가어려울때발생하는상황을의미한다. 이러한상황에대응하여자율주행자동차의윤리알고리즘의대한기준을도출할필요가있으며, 그기준은다수가동의할수있는사회적합의하에마련되어야할것이다. 본윤리실험에서는일반인을대상으로자율주행자동차딜레마시나리오상황을주고자율주행자동차탑승자입장 ( 선택에따른피해를입을수있는입장 ) 에서선택을하도록하고평가자입장 ( 다른사람의선택을평가하며, 선택에따른피해를입지않는입장 ) 에서평가하도록하였고, 두그룹간의차이를알아보고자하였다. 실험결과자율주행자동차탑승자입장의참가자들은자신보다는보행자를보호하는입장의선택을하는것으로나타났다. 반면, 제3자의입장에서는탑승자입장보다는다소이기적인선택에동의하는경향을보였다. 피해의정도를확률로제시한경우보다구체적인상해의정도를제시한경우실험참가자들이더민감하게반응하였다. 보행자피해의정도를 0명에서 1명으로증가시켰을때 40% 의참가자들이자율주행자동차탑승자보다는보행자를보호하는쪽으로의견을달리하였다. 그러나자율주행자동차탑승자그룹의선택에대한평가그룹의동의정도는이와다소차이를보여, 보행자보호를선택한탑승자의선택에동의하지않는참가자가시나리오별로 25-30% 가량나타났다. 그러나두그룹간의자율주행자동차윤리딜레마시거동에대한차이는크지않는것으로판단된다.
234 176 또한제3의평가자가자율주행자동차딜레마상황시자율주행자동차탑승자의선택에대해얼마나동의하는가를평가하고그결과를피드백했을때탑승자입장의참가자들은실험설계시의예상과다르게당초선택을변경한참가자는많지않은것으로나타났다. 그러나제3의평가자의평가결과를피드백하는실험을진행함에있어당초자신의선택을상기시키도록설계하여참가자의선택에왜곡이발생할수있는여지가있었고, 온라인을통해조사가이루어졌기때문에주위환경을통제할수없다는문제또한상존한다. 따라서향후실험에서는이러한왜곡이발생하지않는실험환경을구성할필요가있다. 마지막으로공유자율주행자동차교통법규위반시책임소재에대한질문에서탑승자보다는공유서비스운영자와제작사에책임이있다고응답하였다. 또한, 아무도탑승하지않은자율주행자동차가발생한사고의책임은제작사, 소유자혹은 3자모두에게책임이있다는의견이동일한비율로나타났다. 이러한결과는향후자율주행자동차사고책임배분기준을고려할때수익자부담원칙혹은최소회피비용원칙과같은책임부담원칙의기준을설정할때참고가될수있다. 또한아무도타지않은자율주행자동차의사고발생시책임소재배분을위한참고자료로삼기에는아직미흡한점이많기때문에향후충분한논의가지속적으로이루어져야할것이다. 2. 수용성조사의시사점 자율주행자동차기능별및기술단계별 (3단계와 4단계 ) 이용의사에대한조사에서응답자의절반정도가사용할의사가있는것으로답하여, 아직까지우리나라의자율주행자동차에대한수용성은높지않은것으로나타났다. 그러나자율주행자동차의이용에대해회의적으로판단하는응답자는 15% 내외이고, 보통이라고한응답자가약 30% 내외에서형성되어있어향후자율주행자동차정책및사회적수용성향상노력에따라변동될여지가많은것으로나타났다.
235 제 4 장자율주행자동차윤리및운전자수용성조사 177 자율주행자동차에대한인식을묻는항목에서도대다수의자율주행자동차이용의향과유사하게 25~ 35% 가량이어느쪽에도기울어지지않은의견을보였다. 자율주행자동차의운행시장점에대해운전미숙및졸음등으로인해발생하는실수를예방하여교통사고가감소할것이라는기대를하고있는것으로나타났다. 그러나자율주행자동차운행시우려사항으로시스템의고장으로인해사고가발생할수있다는의견을보였다. 또한무면허자, 고령운전자, 시각장인이혼자자율주행자동차를탑승하는것에대해부정적인의견이더많았다. 일반인의경우약 34% 가부정적인인식을보였고, 영업용자동차운전자의경우약 61% 가부정적인응답을하여, 아직까지완전자율주행자동차의기술력에대한믿음은높지않은것으로나타났다. 그러나영업용자동차운전자중택시운전자의의견이다른업종에비해높게나타나고있어경쟁관계를우려한응답인지는향후좀더조사가필요하다. 도로운행시자율주행자동차와마주했을때에대비하여자율주행자동차는일반자동차와구분되어야한다고많은응답자들이답 ( 약 80%) 하였고, 상당수의응답자들 ( 약 60%) 이자율주행자동차의전용차선이필요하다고응답하였다. 이는영업용자동차운전자들도유사한의견을보인것으로나타났다. 그러나영업용자동차운전자들이일반인에비하여자율주행자동차에대해비호감의의견을보였다. 일반인응답자의약 35-37% 가자율주행자동차를도로주행중만나면, 가까워지지않으려고노력하겠다고하였다. 영업용자동차의운전자중 49.5% 가가까워지지않으려고노력하겠다고하여일반인과큰차이를보이고있다. 또한영업용자동차운전자의자율주행택시, 버스및트럭군집주행의사에대해부정적이응답이높게나타났다. ( 택시 : 48.6%, 버스 47.7%, 군집주행트럭 47.7%)
236 178 제 5 장자율주행자동차윤리및수용성쟁점과 대응방향 제 1 절자율주행자동차윤리와수용성쟁점과대응방향 1. 자율주행자동차윤리와관련된쟁점 1) 자율주행자동차의윤리기준자율주행자동차운행에앞서발생가능한윤리적선택상황에대한대응알고리즘을고민하여프로그램할필요가있다. 이때자율주행자동차의윤리알고리즘을개발하기위한윤리기준을정의할필요가있다. 도로운행중발생가능한윤리적선택상황은기본적인도로교통운행도덕에서부터트롤리딜레마와같은선택이어려운극단적사고상황과같이다양하다. 이때비교적가벼운도로교통규칙준수에대한도덕적기준은기본적으로공리주의라고할수있다. 개인의이익추구에있어타인의이익을저해하지않도록설계하는것을기본원칙으로두고있다는것이다. 예를들어아무런차량이지나가고있지않은한적한시골도로에서신호가바뀌기만을기다리고있는보행자가있다고하자. 이보행자는도로를건너가까운병원에생명이위급한자신의아이를데리고가는중이고, 아이의생명을구하기위해도로교통법규를위반하고도로를횡단한다고하여이보행자를비난하는이는아무
237 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 179 도없을것이다. 보행자는도로교통법규를위반하였으나다른사람의이익에반하지않았고, 오히려아이의생명을구함으로써전체적인사회적편익이증가되었기때문이다. 또한이런정도의도덕적선택은이미모든사람들이합의한상황이라고볼수있다. 그런데단순히프로그램알고리즘에따라행동하는자율주행자동차가이러한상황에서도로교통법규를위반하는선택을할수있도록설계할수있을까에대해서는다수의사람들이합의하는기준이모호한상태이다. 사람은종합적인상황판단하에선택하는것이고, 앞선사례에서교통법규위반의의도가아픈아이를살리고자하는좋은의도이었다는것이전제되어있기때문에그의도로교통법규위반에대해비난하는이가없는것이다. 자율주행자동차의윤리기준에대한논의는아직시작단계라고할수있다. 자율주행자동차의교통법규위반가능성에대한설문조사에서일반인운전자의 73% 와비운전자의 78%, 그리고전문가의 67% 는자율주행자동차는안전을위해법규를엄격이준수해야한다고응답하였다. 반면약 15~ 20% 의응답자들은어느정도의위반은허용할수있다고응답하고있어이용효율을위해일정수준내에서의융통성이필요한것으로응답하였다. 그런데, 이번에는단순한가벼운교통법규의위반이아니라타인의생명혹은자신의피해의정도가큰상황에서도공리주의적인선택을할것인가에대해조사응답자들은이중적인기준을적용하고있는것으로나타났다. 자율주행자동차의운전자가전방에나타난이륜자동차운전자중하나와충돌해야만하는시나리오에서일반인 80% 이상이안전장구를착용한이륜자동차와충돌하여사고발생에따른피해를최소화하는공리주의적인선택을하였다. 반면, 자신이탑승한자율주행자동차가보행자 10명과마주했을때응답자 83% 는보행자 10인을보호하는선택보다는자신의피해를최소화하는선택을하였다. 다만 17% 의응답자들이자신을희생하여 10인의보행자를보호하는이타적인선택을하였다. 자신의피해가보이는선택에서실험참가자들은공리주의적인선택보다는개인주의적인선택을하고있다.
238 180 그렇다면우리가자율주행자동차의윤리알고리즘을설계하는윤리기준을고민하면서, 일반적인다른도로교통법규를설계하는것과마찬가지로공리주의적인기준에따라설계를한다고하면, 정부가국민과자동차제작사들로부터이러한윤리기준이적절하다는합의를도출하는것이가능할것인가는아직까지미지수라고할수있다. 최근실험철학, 행동심리및행동경제학등에서윤리, 철학, 심리및경제적관점에서인간의행동을연구하여어떤문제에대하여사회적합의를이룰수가있는가에대한논의를하고있다. 심리학분야에서는진화심리 (Evolutionary Phycology) 의측면에서인간의생존본능은오랜시간동안진화되어오는것이며, 이러한논리에따라자율주행자동차의트롤리딜레마상황에직면하게되면운전자는무의식적으로자신의생명을구하는방향의선택을할것이라는논리이다. 그러나인간은생명을연장하는방법으로자기자신의생명을연장하는것만을선택한것은아니다. 한개인의생명을연장하는것은한계가있기때문에인간은자손을통하여후대에자신의유전자를지속적으로남기는방법으로진화하였다는것이다. 이러한진화론적심리학의입장에서자신의유전자를공유하고있는자식, 가족과친인척, 나아가부족혹은민족등으로그범위를확장할수있으며, 이들의생명을유지시키기위하여호혜적인 (reciprocity) 입장에서이타심 (Altruism) 이발현된다고 Dawkins(1989) 95) 는주장하였다. 이러한이타심은자율주행윤리실험결과중자신을희생하여이타적인선택을한응답자 17% 의행태를설명해줄수있을것으로판단된다. 또한향후자율주행자동차의윤리기준을공리주의적인입장으로설계한다고할때사회적으로다수가합의할수있는기준이마련될수있다고볼수있다. 향후정부에서제시하는자율주행자동차에대한윤리기준에합의할수있는가에대한논의가더필요할것으로판단된다. 이를위해자율주행자동차 95) Dawkins, Richard, The Selfish Gene, New York; Oxford University Press 1989,
239 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 181 윤리기준에대한사회적합의를이룰수있는실험철학의시나리오를좀더 정교히가다듬고, 실험에적합한통제된환경을마련하여진행할필요가있다. 2) 자율주행자동차기술단계별윤리적책임자율주행자동차의윤리딜레마상황에서의의사결정에관한윤리적책임의소재와의사결정에있어우선고려해야할대상에대한인식은자율주행자동차윤리선택에대한책임의주체와윤리기준을정하는데중요한정보가될수있다. 극단적딜레마상황에서의선택결정에있어자율주행자동차의운행지배권에대한의견은일반인과전문가의의견에있어많은차이를보이고있다. 본연구의조사결과에서극단적사고상황발생시윤리적의사결정의주체로일반인운전자의 51% 와비운전자 53% 가자율주행자동차탑승자라고가장많이선택한반면, 전문가의 33% 만이자율주행자동차탑승자라고응답하여차이를보이고있다. 또한정부및법률로정해야한다고응답한일반인운전자와비운전자는각각 14% 와 22% 인반면, 전문가의경우 42% 가정부및법률로정해야한다고응답하여차이를보이고있다. 전문가들이딜레마상황에서의선택을정부정책및법률로정해야한다고한것은완전자율주행자동차의알고리즘개발에있어극단적인사고상황에대비할수있도록윤리가이드라인혹은법규범으로정해야한다는견해가반영된것으로판단된다. 자동차의안전기준을마련하는절차와자율주행자동차윤리선택기준을정하는점이유사하다고할수있다. 일반적으로자동차의안전성을평가함에있어극단적인위험환경을제시하고, 이런환경에서자동차가얼마나안전하게거동하는가에대한임계치를도출하여자동차안전기준으로제도적규칙으로정하고있다. 이와유사하게자율주행자동차의윤리딜레마상황알고리즘을설계하기위한윤리기준의임계치를설정하고, 관련내용을정부의가이드라인으로정할수있다. 이러한전문적인선행지식이있는전문가들은윤리딜레마상황에서자동차운행안전을위한알고리즘설계가이드를정부및법률로정해야한다는입장이설문결과에반영된것으로판단해볼수있다.
240 182 반면일반인은실험시나리오상자율주행자동차탑승자의입장이되어본경험이있기때문에전문가들보다는직관적으로자율주행자동차탑승자가딜레마직면시상황결정권자가되어야한다고응답한것으로판단된다. 따라서자율주행자동차윤리선택알고리즘의설계기준을정함에있어전문가와일반인의인식차이를좁힐수있는노력이필요하다. 2. 자율주행자동차수용성과관련된쟁점 1) 자율주행자동차에대한인식자율주행자동차에대한인식의정도는향후자율주행자동차의확산에영향을미칠수있다. 자율주행자동차운행에따른장점과단점을물었을때운전자의인적요인으로인한교통사고발생감소를가장많은응답자들이장점으로선택하여교통사고발생감소에대한기대가큰것으로나타났다. 그런반면자율주행시스템고장으로교통사고가발생할수있다는것을가장큰우려사항으로보고있어, 인적요인으로인한교통사고발생의감소를기대하지만아직까지자율주행시스템의기술적신뢰성은낮은것으로판단된다. 자율주행자동차에대한인식으로안전한이동목적부합성, 도시부도로통행효율성, 에너지및시간활용의효율성, 자동차이용의안전확보, 개인정보에대한안전등의내용이주요이슈가될것이다. 개별항목에대한운전자의인식조사결과를정리하면 < 표5-1> 과같다. < 표 5-1> 자율주행자동차에대한인식비교 비고 운전자 (%) 비운전자 (%) 전문가 (%) 직업운전자 (%) 긍정중립긍정중립긍정중립긍정중립 목적지까지안전한이동가능성에대한인식 가족의안전한이동가능성에대한인식 도시부도로의효율적
241 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 183 비고 운전자 (%) 비운전자 (%) 전문가 (%) 직업운전자 (%) 긍정중립긍정중립긍정중립긍정중립 이동가능성차량연비개선 시간의효율적활용 교통사고발생감소기대 무면허자 / 고령운전자 / 시각자애인단독운행 개인위치정보공유에대한인식 평균 자율주행자동차를이용하여목적지까지안전하게이동할수있을것이라는항목에서일반인운전자와전문가는긍정적인의견이많은것으로나타났으나가족을안전하게이동시킬수있을것이라는항목에서는긍정적으로인식하고있는응답자들이감소하였다. 이는가족, 특히자녀를안전하게목적지까지의이동을도모함에있어아직까지는자율주행자동차가부모의역할을대신할수없다고인식하는응답자가많은것으로판단해볼수있다. 복잡한도시부도로의이동에있어자율주행자동차가다른차량과비교하여효율적으로이동할수있을것인가에대해서는직업운전자가가장보수적인응답을한반면, 일반인운전자가가장긍정적인답을하였다. 본조사의대상이되는직업운전자는버스, 택시, 화물차량운전자로택시와버스운전자의경우일반인에비하여더많은시간도시내부도로를통행하고있어자동차운행중도시교통환경의어려움을더잘인식하고있기때문인것으로판단된다. 특히택시운전자의경우자율주행자동차의등장에따라자신의업역다툼이발생할소지가있으며, 이에따라부정적인인식을가지고있는응답자가많은것으로판단해볼수있다. 시간의효율적활용, 즉평소자가용자동차로이동하는동안운전에집중하는것이외의다른활동을할수있을것이라는기대는일반인운전자가가장긍정적인기대를하고있는것으로나타난반면, 전문가와직업운전자는
242 184 큰기대를하고있지않은것으로나타났다. 특히일반인운전자의경우자동차운전으로소비되는시간을다른활동에활용할수있다는것에긍정적인인지를하고있는것으로나타나향후자율주행자동차상용화시자동차선택에있어중요한의사결정요소가될것으로판단된다. 한편, 직업운전자의경우긍정적인의견이매우낮았는데, 이는자신의업역과상충되는부분이있기때문인것으로판단된다. 또한전문가들의긍정적인답변이높지않은것은자동차기술을고려할때아직까지자동차스스로운행하는것에대한전문가적견해가개입된것으로판단해볼수있다. 3단계자율주행자동차의경우도로운행중운전자의전방주시가필수적이기때문에현재수준에서상용화가능성이높은 3단계자율주행자동차가보급되더라고운전자의시간활용성향상효과는일반인이기대하는것보다는높지않을수있다. 이에따라일반인들이자율주행자동차의기술수준에따라요구되는운전자의자동차주행의무에대해보다명확히이해시키는것이필요하다. 교통사고감소부문에있어많은전문가들이교통사고발생감소효과가있을것으로기대하고있으며, 무면허자 / 고령운전자 / 시각장액인의단독이용가능성에대한기대는전문가가가장높은것으로나타난반면, 직업운전자의경우부정적인인식이높은것으로나타났다. 개인위치정보를공공데이터베이스에제공하는것에대한거부인식은 30% 내외로조사그룹별로큰차이를보이고있지는않다. 또한중립적인응답은일반인운전자와직업운전자는 30% 이고, 일반인비운전자 41%, 그리고전문가는 22% 로나타났다. 개인위치정보는자율주행자동차의운행안전성확보를위하여도로인프라에서필요한정보이다. 그러나개인의위치정보는사적인영역의정보로타인에게제공하는것을꺼리고이를보호하고자하는개인의의지또한중요한요소이다. 향후정부에서는개인위치정보제공범위에대한의사결정에있어개인정보보호의원칙과공익적편익추구원칙의균형을유지하는것이매우중요할것으로판단된다. 이문제는향후자율주행과도로인프라의협력이증대함에따라주요쟁
243 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 185 점으로대두될것으로판단된다. 개인의정보보호에치중하여기술의발전을저해하고, 공익을저해하지않도록적정공개수준과원칙을마련할필요가있다. 마지막으로직업운전자의자율주행자동차에대한인식질문에서부정적인입장을보이는것으로나타났다. 완전자율주행자동차의도입은일반운전자들에게기대와불안을동시에제공한다고할수있으나, 직업운전자들에게는자신의직업영역과경쟁관계에놓이게될가능성이높기때문인것으로판단된다. 특히개인택시운전자들에게는공유자율주행자동차및자율주행택시와같은새로운수단의등장은직접적인위협으로작용하게될것이다. 이들직업군은새로운대중교통수단등장에보수적인입장일수밖에없다. 최근우리나라에진출을시도했던우버택시사례와같이특수집단의이익과공익의충돌로인하여발생하는갈등을완화하기위한방안마련이필요한것으로판단된다. 2) 자율주행자동차기술단계별이용의사자율주행자동차기능의장착의향과기술단계별이용의사는향후자율주행자동차보급에영향을미칠것으로판단된다. 일반인과전문가의자율주행기능장착의사조사결과자율주행기능별장착의사평균점수를살펴보면, 일반인의경우적응식정속주행시스템이가장낮은 4.6점이고자동주차시스템에대한점수는 5.2점으로가장높게나타났다. 그러나평균지불의사가격은과속방지시스템이가장낮은 23만원이고, 자동차주차시스템에대한평균지불의사가격이가장높은 41.5만원으로나타났다. 반면전문가의경우과속방지시스템에대한장착의사평균점수가가장낮은 4.1점이고, 자동제동장치의평균점수는 5.9점으로가장높았다. 기능별지불의사가격은과속방지시스템의지불의사가격은 15.5만원으로가장낮았고, 자동제동장치에대한지불의사가격은 39.4만원으로가장높게나타났다. 전반적으로자동제동장치와자동주차시스템에대한장착수요는높은것으로나타난반면과속방지시스템과적응식정속주행시스템에대한가격이낮
244 186 게나타나자동차속도조절과관련된기능의선호가낮은편이고, 자동제동장치와자동주차시스템과같이제동및조향장치를사용하는기능에대한선호가높게나타났다. 또한기능별지불의사가격은기능별예시가격을주지않은개방형설문을한결과의평균으로일반인이관련된기능을장착하기위한지불의사가격은현재차량에더하여장착하는추가기능으로인지하고있는것으로판단된다. 그러나이러한기술을실제로구현하여상용화했을때의가격과는차이가있을것으로판단되어기술과가격에대한심리적거리를줄일수있는방안마련이필요하다. < 표 5-2> 자율주행기능장착의향및지불의사가격 비고 평균지불의사가격 ( 만원 ) 장착의향점수일반인전문가일반인전문가 자동제동장치 적응식정속주행시스템 차선이탈경고시스템 전방충돌경고시스템 과속방지시스템 지능형속도조설시스템 자동주차시스템 단계자율주행자동차이용의사에서일반인운전자와비운전자의이용의사는과반수이상으로나타났고, 전문가의경우 68% 로비교적높게나타났다. 또한부정적인의사보다는보통이라는중립적의사도 30% 이상으로높게나타났다. 4단계완전자율주행자동차에대한이용의사또한 50% 이상으로나타났고부정적의견은상대적으로낮은것으로나타났다. 이러한자율주행자동차에대한이용의사와대조적으로교통서비스와관련된이용의사는상대적으로낮게나타는이중적인모습을보이고있다. 자율주행버스의이용에긍정적인입장은약 30% 수준인것으로나타난났고, 보통이라는중립적입장은 40%
245 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 187 내외로나타났다. 또한완전자율주행택시에대한긍정적인이용의사는 26-33% 수준으로나타났고, 보통이라는의견이 32-36% 수준으로나타났다. 한편자율주행공유이용의사는긍정이 36-45% 중립이 32-37% 수준으로택시이용의사보다는높으나개인자율주행자동차이용의사보다는낮은수준으로조사되었다. 서로유사한기능을하는택시와공유자율주행자동차에대한이용의사에서차이가크게발생하는것은일반인이이들자율주행서비스에대한인식이아직까지낮기때문이것으로유추해볼수있으며, 자율주행기능과서비스에대한홍보가필요한것으로판단된다. 3) 도로공용에대한의견자율주행자동차의이용자뿐만이아니라도로를공유할주변차량의자율주행자동차에대한수용성또한중요한요소로안전한도로이용을위해일반대중에게자율주행자동차가어떻게인식되는가를검토할필요가있다. 완전자율주행자동차가공용도로를주행한다고할때다른차와구분이될필요가있다고한응답자는 80% 이상인것으로나타났다. 또한완전자율주행자동차가운전자없이도시내부의운행가능성에대해 60% 이상의응답자들이그럴수없다는부정적인의견을보였고, 전용차선이필요한가에대해일반인과직업운전자의 60% 이상, 전문가 46% 가전용차선이필요하다고하였다. 또한도로운행중자율주행자동차를대면할경우어떻게대응하겠느냐는질문에일반인과전문가의 35% 이상, 직업운전자의 50% 가가까이하지않도록노력할것이라고하고, 일반인비운전자의 46%, 운전자, 전문가, 직업운전자의 25% 이상이잘모르겠다고응답하였다. 이는다시말하면, 도로주행중운전자가없는자율주행자동차를대면하는상황에대한사고를해본경험이없는것으로판단된다. 공용도로상에서운행하는자율주행자동차에대한인식을종합적으로살펴보면, 아직까지자율주행자동차가바로옆차선에서나란히운행하는것에대
246 188 해비교적부정적인입장을보이고있는것으로판단된다. 이러한입장은설문조사결과자율주행자도차가운전자없이도심을통행하는것에대한부정적인인식, 다른차량과구분이될수있는표식이있어야한다는것과별도의차선을마련해야한다는분리인식, 그리고가까이다가가고싶지않다는인식이높게타나난것에서유추할수있다. 3. 윤리와수용성쟁점의대응방향 1) 윤리쟁점의대응방향 1 윤리딜레마대응알고리즘자율주행자동차와관련된윤리쟁점에대응하여자율주행자동차윤리알고리즘의프로그램원칙과기준이필요하다. 자율주행자동차윤리알고리즘의기본은공리주의가되어야할것이다. 이는현재자동차관리및도로교통관련법령의입법윤리기준이공리주의이기때문에자율주행자동차윤리기준에있어다른도덕기준을제시한다고한다면혼란이발생할수있기때문이다. 다만, 현재의제도는자율주행자동차와같은극단적인사고상황을미리고민하지않고사고가발생한경우, 사례별특성을고려하여사후적인조치를한다는것이다른점이라고할수있다. 또한적발의기대가아주낮은경미한법규위반에대한처벌의문제를고민하지않고적발시에만관계자의의도와주변상황을고려하여처벌하고있는것이다른점이다. 그러나자율주행자동차는현재까지와는다르게적발의기대가아주낮은경미한법규의준수문제에서부터발생할확률이극히낮은극단적사고상황까지종합적으로고려하여프로그램해야하는문제가있다. 이러한법규범준수에대한윤리적문제와극단적사고상황에서의윤리적선택문제에는개인의편익과공공의이익에대한고민을반듯이포함해야한다. 그러나현재의사후적사고사례에대한처벌을판단하는것과유사하게발생가능한모든사례를고려한알고리즘을개발하여프로그램하는것은다소낭비적인요소가
247 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 189 있을수도있다. 또한현재가까운미래에실현된기술을대상으로윤리알고리즘을고민하는것과미래에실현된기술수준의차이가발생하게된다면, 현재기준의알고리즘의유용성이떨어질수있는문제또한존재하고있다. 이렇게자율주행자동차의윤리알고리즘개발을위한기준을정하는것은과거, 현재, 미래를아우르는철학적고민과더불어기술적미래예측까지포함하여고민할필요가있다. 2 윤리적선택책임배분을위한법적정의윤리적선택이개입된사고발생시사고당사자의주체를확고히하고윤리적책임문제에대해접근할필요가있다. 현재자동차사고발생시의법적책임은수익자부담원칙에따라배분하고있다. 이는다시말하면, 자동차사용을통하여수익을얻을수있는이용자, 제작사, 공유운영자들이사고상황에서의윤리적선택에대한책임을감수해야한다는것이다. 또한윤리적책임을회피하기위한보험제도를개발하기위해서는최소위험회피원칙을고려할필요가있다. 즉, 자율주행자동차를운행함에있어발생할수있는위험요소는이용자관점, 제작사관점, 그리고공유운영자관점에따라다르며, 이들이가지고있는차량의위험정보량과이를회피하기위한비용측면을고려하여가장적은비용으로위험을회피할수있는측에서보험책임을감수해야한다는것이다. 앞서설명한두가지관점의원칙을적용하기위한전제조건으로관련법령에자율주행자동차가법적으로정의되어야하며, 법적정의에있어자율주행기술수준에따른고려가필요하다. 2) 수용성쟁점의대응방향자율주행자동차수용성의주요쟁점은자율주행기술에대한인식, 개인정보보호범위및이해, 기술단계및서비스별자율주행자동차의이용의사, 자율주행자동차와도로공유에대한수용성으로구분해볼수있다.
248 190 1 자율주행기술에대한이해증진자율주행자동차의인식조사에서일반인과전문가의차이가나탔다. 특히, 자율주행자동차를이용함에따라주행중다른활동을할수있을것이라는시간의효율적활용부문에서일반인운전자와비운전자모두전문가와직업운전자에비해긍정적인기대를하고있는것으로나타났다. 현재의자율주행관련법규정과기술수준이아직까지는자율주행중전방주시의의무가있으나일반인의긍정적인인식이기술적현실을다소앞서나가고있는것으로판단된다. 최근미국에서발생한테슬라사의자율주행자동차충돌사고는운전자의오토파일럿기능에대한과신으로긴급상황대응에미흡했던사례라고할수있다. 따라서자율주행자동차상용화와보급시이용자의기대수준이실현가능한기술수준과조화될수있도록이용자의수용성개선이필요하다. 2 개인정보보호범위설정및이해증진개인의위치정보공유에대한인식에서일반인운전자, 비운전자와직업운전자의인식에비해전문가의인식이다소높은것으로분석되었다. 전문가의경우개인의위치정보가자율주행의효과성을높이는데꼭필요한정보라는것에대해인지하고있기때문에이에대한긍정적인식이높게나타난것으로판단된다. 향후개인의위치정보의공유의무화필요성증대와이에대비하기위하여일반인의인식을개선하여수용성을높일필요가있다. 3 자율주행기술및서비스별수용성향상자율주행자동차운행시에가장우려되는사항을조사했을때자율주행시스템결함으로인한교통사고상황발생이가장높았고, 사고발생시책임소재가모호한점에대한우려가높게나타났다. 이는자율주행자동차의도입으로이용자편의가향상될것을기대하고있으나, 아직까지자율주행자동차의기술에대한우려와법제도적여건마련이미흡하다는우려가반영된것으로판단된다.
249 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 191 자율주행기술수준별그리고제공서비스별이용의사에서 3단계와 4단계의자율주행자동차이용의사는높게나탔으나자율주행버스, 택시, 공유서비스에대한이용의사는상대적으로낮은수준으로조사되었다. 특히외국에서는자율주행셔틀버스의상용화가이루어진상태로우리정부와지자체에서는관련기술도입을위한기술개발을위한정책을마련하여추진하고있다. 이에따라자율주행버스의도입은개인용자동차의상용화에비해빠른시일내에가시화될것으로판단되며이에대비하여일반인과운수사업자의수용성향상이필요하다. 도로공용이용과관련하여자율주행자동차가자신의주변에서운행하는것에대한인식은부정적인것으로나타났다. 설문결과에서는자율주행자동차는다른차량과구분이될수있도록하고, 전용차선을지정하여야한다는인식이높은것으로나타났다. 현재개발하고있는자율주행자동차기술의안전성평가를위한실증을위해일정기간동안전용차선을설치하여운행하는것이필요한것으로판단된다. 따라서자율주행자동차실증운행은전용차선지정운영단계부터시작하여향후일반자동차와혼용하는단계로구분하여단계별로일반인의수용성을높이는노력이필요하다. 4 자율주행기술단계별접근자율주행자동차와관련된일반인 ( 운전자및비운전자 ) 의수용성을높이기위해단계적접근이필요하다. 자율주행자동차에부가기능으로장착되는 ADAS 수준의보조기능서비스에대한운전자수용성과완전자율주행자동차에대한운전자및비운전자의수용성은그범위와깊이가다르기때문이다. 따라서기술개발방향과기술단계별상용화시기등을고려하여관련기술에대한운전자및사회적수용성을고민할필요가있으며, 기술개발단계에서관련기술의수용성정도를파악하여기술개발방향에적용함으로써상용화기술개발완료후효과적으로보급하는전략을마련할필요가있다. 이를통하여정책입안자의정책목표를달성하고기술개발에참여한기업인이규모의경제달성을위한보급속도를가속화할수있을것이다.
250 192 제 2 절자율주행자동차의법적책임쟁점과대응방향 1. 자율주행자동차의법적책임의쟁점 윤리규범과법규범은해결방안을제시하는부분과위반에대한제재의측면에있어서큰차이가있다. 윤리규범은윤리적판단이요구되는상황에서다양한윤리기준에따라다양한해결방안을제시할수있으나법규범의경우법적판단이요구되는상황에서이미합의되어있는법규정에따라하나의해결방안만을제시한다. 따라서위반에대한제재의측면에서윤리규범은규범과그위반에대한제재의관계는느슨하나법규범은규범의위반에대한제재가강력하고확실하며집행에있어국가권력이뒷받침된다고할수있다. 다시말하면, 법규범의경우위반에따라다양한책임소재와함께법적제재의문제가발생하나윤리규범의경우위반이있더라도도덕적인비판이가해질뿐법적인책임은따르지않는다는것이다. 자율주행자동차의운행과관련된법적문제가제기되면단순한윤리문제뿐만이아닌그에대한손해배상책임혹은형사책임문제가현실적인문제로써발생될수있다. 자율주행자동차의운행에따라발생하는문제가법의문제가되면관련성문법규에의한책임문제가발생하기때문에이와관련된책임귀속및집행에대한현실적인검토가필요하다. 따라서자율주행자동차와관련된법적문제의제기는담론에서현실문제로이행하는것에초점을맞춰야할것이다. 자율주행자동차의법적문제제기의시작은자율주행자동차를어떻게정의할것인가에서출발된다고할수있다. 현재자율주행자동차를대리인으로정의하는입장, 사법적제조물혹은인공지능으로보는입장이있다. 자율주행자동차를어떻게정의하는가에따라사법및형법적영역의관련법규적용을위한해석이달라지고, 결과적으로책임의소재와무게가달라질수있기때문이다.
251 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 193 가. 자율주행자동차의법적정의쟁점 1) 대리인으로써자율주행자동차정의와책임자율주행자동차의윤리와관련된쟁점을먼저기술단계별자율주행자동차의법적정의에대한합의가이루어져야한다는것이다. 앞서논의한바와같이낮은기술수준의자율주행자동차인경우이용자의이동성과편의성을향상시켜주는보조적인도구의역할을한다고할수있다. 예를들면자율주행 1 2단계자율주행자동차의기능은좀더세련되고복잡한첨단의기술을접목하여운전자의안전한자동차운행을보조하는역할을수행하는것이다. 따라서 1 2단계의자율주행자동차는법적으로운행을보조하는장치로볼수있으며, 1 2 단계자율주행자동차를이용함에있어발생하는법적책임은이용자와제조자에게있다고할수있다. 1 2 단계자율주행자동차의법적책임이이용자와제조자에게있다고하는것은윤리적책임또한이용자와제조자에게있다고볼수있다. 이경우, 트롤리딜레마와같은사고상황에서자동차는단순히운전자의판단에따라움직이는물건일뿐, 윤리및법적책임은이용자와제조자에게있다고볼수있다. 그러나자율주행 3 단계의자율주행자동차는낮은기술수준의자동차와극명히다른기능이하나가더추가되는데, 이는자율주행자동차스스로환경을인진하여상황판단을할수있다는것이다. 여기서말하는상황판단은인간에의해서이루어지는종합적이고고차원적인상황판단은아니다. 단순히도로운행중전방에정체를알수없는장애물이나타났다고하는정도의상황판단으로, 인식할수있는장애물의종류에따라어떻게거동해야한다는알고리즘이프로그램된정도라고할수있다. 이때자율주행기술 3 단계인경우에는주행제어권을운전자에게전환할때사고를회피할수있는적절한시간차를두고전환해주는것이다. 따라서 3단계자율주행자동차는아주제한적인범위에서운전자의운전역할을대리한다고할수있으며, 극단적인상황에서의윤리및법적책임은운전자에게있는것으로판단된다.
252 194 반면, 고도의자율주행자동차및완전자율주행자동차는이용자를대신하여도로를운행하는중발생하는모든상황을판단하여안전하게이용자를목적지까지수송하는역할을한다고할수있다. 이때완전자율주행자동차의소유여부에따라서법적정의가분류될수있다. 예를들면, 완전자율주행자동차가개인의소유물인경우개인의운전행위를대리하는역할을할것이다. 공유자율주행자동차라고한다면, 공유서비스운영자의역할을대리하는것으로볼수있다. 만인개인공유서비스운영자를대리하는것이라고한다면, 개인소유물로써개인의운전행위를대리하는것으로볼수있고, 만인법인공유서비스운영자를대리한다고한다면법인의행위를대리한다고할수있다. 개인혹은법인의공유서비스를대리하는경우자율주행자동차는대리인으로보아도무리가없을것이며, 현재타인의명의로영업용자동차를운행하는운수업종사자의법적인격과기능적인면에서유사하게정의될수있을것이다. 물론운수업종사자와같은수준의운전능력을발휘하기위해서자율주행자동차는상당히많은기술적진화가필요하다는것을전제로한다. 자율주행자동차가대리인으로써정의된다고할때극단적사고상황에서의윤리책임은사용자에게있다고볼수있다. 따라서자율주행자동차가대리하는주체에따른법적정의가필요하다. 2) 제조물혹은인공지능으로서자율주행자동차정의 1 자율주행자동차의사법상법적인격과사고책임현행재산법은권리행사의측면에서권리의주체와권리의객체로이분하여구분하고있다. 즉재산권의행사주체인권리의주체는사람과법인과재산권의행사대상인권리의객체는물건이다. 또한권리주체의권리행사유형을물건에대한물권법체계로써, 사람에대한채권법체계로써구분한다. 물권법은권리주체인사람이권리객체인물건을지배하는권리이고, 채권
253 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 195 법은권리주체인사람이다른권리주체인사람에대한청구권을시행한다. 자율주행자동차는제조된동산으로서물건이며권리의대상이며, 자율주행자동차가자율성을가지고행동하는권리주체로써구분되기위해서는권리주체인사람으로볼수있어야한다. 그러나법체계에서권리의귀속주체 ( 권리능력 ) 의문제와행위주체나불법행위주체로서의성격은논리적으로구별될여지가있다. 자율주행자동차의경우권리주체성은인정이어려우나행위주체로서의성격이인정될여지가크다. 로봇의행위주체성을인정한다면그에따른관리 감독상의책임을간접적으로자연인에게부과할수있다. 자율주행자동차를권리주체로인정할것인가에대한논의는지속되고있으며현재까지는권리주체로써인정되기에는시기상조라고할수있다. 완전한자율성을갖는자동차가개발되고있는현시점에서이문제는중요하다. 그러나현재의자율주행자동차는아직까지사람의지시에따라행동하기때문에자율주행자동차의권리주체성을인정할필요는없다고판단된다. 자율주행자동차로인한사고가발생한경우, 사고의책임과손해배상에대한문제가발생한다. 자율주행자동차의행위주체성이부인된다면부분적자율성을가진자율주행자동차는물건으로써취급될수있다. 이러한경우책임은자율주행자동차사고의원인이어느영역에있는지에따라결정된다고할수있다. 물건자체의흠결인경우, 제조물책임법에의해제조자가책임을져야한다. 물건의운용과관련된사고의경우, 운용자가책임을지게될가능성이있다. 예를들면, 자동차운행의경우, 운행자책임이특별법인자동차손해배상보장법에의해규정된다. 따라서자율주행자동차의경우, 자동차손해배상보장법이엄격책임이적용된다고할수있다. 자율주행자동차사고에따른책임과보험문제는책임의주체에따라가입가능한보험이설정된다. 제조자가책임을지는경우, 자율주행자동차의제조자는제조 설계상결함등으로인해제3자가손해를입는경우에대비하여제조물책임보험에가입할수있다. 운용자가책임을지는경우자율주행자동차를이용하는자가그이용과관련하여타인에게손해를입혀손해배상책임을
254 196 져야하는경우에대비하여책임보험에가입할수있다. 현행자동차손해배상책임법제와제조물보험법제의체계는운행책임위주의보험법제구조이다. 자동차의운행상발생한사고에대해서는운행자가, 자동차의결함으로발생한사고에대해서는제조자가책임을지게하고있다. 현재발생하는자동차사고원인의약 90% 는운행자에게운행과실의원인이있고, 9% 는자동차운행의외부환경조건에의해발생하며, 1% 의사고만이자동차의기계적결함에기인한다. 현행책임보험제도또한위의사실을반영하여운용되고있다. 즉, 높은운전자과실을회피하기위한자동차책임보험제도가주된제도로써활용되고, 이를위해일정한도의책임보험이의무화되어있다. 그러나낮은제조자과실을보완하기위한자동차제조자의제조물책임보험은아직활성화되어있지않다. 자율주행자동차에제조물책임법을적용하는것의적절성여부에대한책임법제상쟁점이있다. 현행제조물책임법의해석에앞서, 자율주행자동차의운행으로인한운행책임이전부제조자에게배분될지에대한여부는분명하지않다. 자율주행자동차의사고원인이자율주행기술과장치를작동시키는소프트웨어의오작동혹은결함에기인한경우, 소프트웨어는동산이아니기때문에제조자가제조물책임을벗어날가능성이높다. 대법원이인정한것처럼원고의입증책임을완화하더라도원고가자율주행자동차사고원인이설계상결함에있다고주장하며특정한대체설계를제시하는것은어려움이있다. 자율주행자동차운행시의보험법제의쟁점은자동차보험과제조물책임보험의측면으로구분할수있다. 자율주행자동차의등장은자동차보험의역할을감소시킬수있다. 지금까지발생한자동차사고의주된원인은운전자의운행과실이었으며, 운행과실로인한사고를담보하기위해운전자혹은운행자로하여금책임보험을강제로가입하도록하고있기때문이다. 2 자율주행자동차의형법상법적인격과책임 현행형사법은형법상행위에대해범죄행위능력과형사책임능력으로이분
255 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 197 하여구분한다. 형법은정신적존재인인간의행위에대해형법적평가를내리는데, 행위중가벌적범죄의성립요건에해당하는구성요건해당행위임을우선검토한다. 이때, 범죄의구성요건에해당하는행위인경우에행위자에대해형사적책임능력을따져형사책임능력이인정되면형벌에처하는구조를지닌다. 이와같이형법은형법상의행위에대해범죄행위능력과형사책임능력을가진자연인을전제로하며행위주체성을의미하는범죄능력과행사책임의귀속주체로써의책임능력을구별한다. 자율주행자동차가자율주행을하던중사고를야기하여가벌적범죄가발생했을경우의자율주행자동차의처벌여부는여전히미지수이다. 자율주행자동차를범죄능력의주체인사람으로간주할수있는지, 그리고주체로써처벌한다면어떠한처벌을할지와처벌하지않는다면가벌적범죄에대해누가행사책임을져야하는지에대한논의가필요하다. 자율주행자동차는형법상법주체성이없다고판단할수있으며범죄능력과행사책임능력또한없다고할수있다. 범죄능력은범인의범죄능력과마찬가지로법 정책적으로처벌규정을도입할필요가있는가라는문제와연결된다. 현행법체계에서도충분히가능한방법이나로봇에대한사형, 재산형, 자유형등은의미가없다. 따라서실효성을갖기위해서는제조자, 사용자, 소유자등인간에대한형벌이더효율적이다. 책임능력은전통적인형법의틀안에서는윤리적 인격적결단에대한법적책임을의미하며다른판단에따라범죄가아닌적법한행위가가능하였는가를기준으로한다. 이문제는윤리적주체성과연결되며로봇의윤리적주체성이부정되는경우그책임은전적으로제조자, 사용자, 소유자등의인간에게귀속될것이다. 형벌은행위자에대한도덕적비난을수반하는불이익으로써형사책임은일차적으로그행위자에대해불이익으로서효과가있어야한다. 또한형벌은해당공동체에속한다른사람들에게법을준수하도록하는효과 ( 일반예방효과 ) 와행위자 ( 범죄자 ) 로하여금다시범죄를저지르지않도록하는효과 ( 특별예방효과 ) 를기대할수있을때에만정당한형벌이라할수있다.
256 198 로봇의사고에대해사형에준하는해체또는폐기, 재산형혹은자유형에준하는일정기간의운행금지등의조치는가능하다. 그러나이는로봇에대한불이익이된다고보기는어려우며제조자 사용자 소유자등인간관계자들에대한불이익을수반하지않는이상효과가없다. 자율주행자동차의사고로인해제조자 사용자 소유자등이불이익을받는경우, 그사람이다른추가적인사고를방지하기위해노력할것이므로특별예방의효과가있다고볼수있다. 또한로봇에대한해체나폐기, 일정기간의운행정지등은자율주행자동차자체에대해서는효과가없으나다른자율주행자동차의제조자 사용자 소유자등인간관계자들에대해서는일반예방효과를가질수있다. 따라서형법적인의미에서자율주행자동차를독자적인주체로써인정할필요성은없다. 자율주행자동차의운행자가교통사고로인하여사람을사상에이르게한자는차의운전자이므로형사처벌을받을가능성이존재한다. 자율주행자동차를작동하게하는소프트웨어의흠결로인해사고가난경우, 자율주행자동차의운행자는자신이운행하지않으므로자신의과실이없다고생각할수도있다. 그러나운행자는차의운전자로서의주의의무를진다고볼수도있으므로형사처벌될가능성이존재한다. 또한피해자의존재를생각한다면책임이필요한데민사책임만으로도충분한가에대한문제가발생한다. 3 자율주행자동차의행정법상법적인격과책임현행행정법관계는행정주체와행정객체사이에서발생하는행정상법률관계를의미한다. 행정주체는국가, 지방자치단체, 고공기관등이해당되며실제행위는권리능력이있는자연인 ( 예를들어공무원 ) 또는법인에의해수행된다. 행정객체는행정주체의행정상행위의대상이되는자로서자연인또는법인이이에해당한다. 행정법관계에있어권리능력에대한인정은행정주체와행정객체모두사법상의권리능력, 행위능력의규정에적용받는다. 현행도로교통법은차마를그본래의사용용법에따라사용하는것을운전
257 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 199 의개념을정하였으며, 운전자를중심으로면허제도 통행방법등의도로교통법체계를구성하고있다. 자율주행자동차가일반화되면현행과같은도로교통법체계를어떻게변화시킬것인지에대한근본적인연구가필요하다. 또한현행도로교통법제에의하면무면허운전 음주운전 안전규칙위반등의경우, 운전자에대한면허취소및정지 교통범칙금등의행정책임을부과한다. 이러한경우자율주행자동차가책임을지는가에대한것은권리능력의문제이며, 책임을지지않는다면누구에게그책임을물을것인지의문제가발생한다. 현행국가배상법상공무원의위법한직무행위 ( 제2조 ) 또는영조물 ( 도로 하천등의공물 ) 의하자 ( 제5조 ) 로인한손해가발생한경우, 국가의손해배상책임이인정된다. 공무수행로봇의경우, 우선적으로제 5조상의영조물로서손해배상책임이인정되며만일주체성 ( 권리능력 ) 인정여부에따라제 2조상의손해배상책임문제가제기될수있다. 3. 윤리문제및책임법제관련대응방향 자율주행자동차는운행과관련하여다양한법령에적용될수있다. 자율주행자동차운행중발생한사고에대한책임의의무와보험가입과관련된사법상문제로누가책임을지고, 누가보험에들어야하는가에대한문제와형사법상의처벌주체는누가될것인가에대한문제가있다. 또한, 자율주행의규제와주행환경의정비를위한운전자 도로및자동차등에관한행정법상문제가있다. 이러한문제들은사법 형법 행정법이기초하고있는기본개념들에대해근본적인검토와함께개별관련법규의개정또는제정필요성을요구하고다음의사항에대한검토가필요하다. 사법상의문제는자동차손해배상보장법 제조물책임법 보험법등의해석으로자율주행자동차운행으로인한책임과보험문제를해결할수없다면, 특별
258 200 법제정을통해문제를해결해야한다. 형사법상의문제는자율주행자동차운행에대한형사책임의완화에대해검토하여야하며교통사고특례법에특별규정신설의필요성등을검토해야한다. 행정법규정비를통하여자율주행자동차의규제와자율주행환경의조성을위해관련행정법규에대한정비작업을진행하여야하며, 관련법규로는자동차관리법 도로교통법 도로법 통신보호법등이포함되어야한다. 이들법제도를검토함에있어기본전제로볼것은자율주행자동차를법적으로어떻게정의할것인가에대한합의가이루어져야한다. 예를들면, 자율주행자동차가이용자의운전행위를대리하는경우자율주행자동차의최종책임은자율주행자동차에자신의권리일부를대행한이용자에게갈것이기때문에그에따른법령검토의범위가달라질수있다. 따라서자율주행자동차가관련법령에서정의함에있어상호조화를이룰수있도록할필요가있고, 관련법령의제 개정범위와자율주행자동차의적용범위에대한면밀한검토가필요하다. 또한자율주행자동차는적용기술수준별로같은법령안에서서로다르게정의될수있으며, 정의에따른법령적용범위가달라질수있다. 이에따라자율주행자동차를관련법령에서정의함에있어자율주행자동차의기술개발, 상용화, 적용, 서비스제공단계등과같이기술개발및적용단계별로필요한법령제 개정이이루어질수있도록단계별적용전략을마련할필요가있다.
259 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 201 제 3 절자율주행자동차보험관련쟁점과대응방향 1. 자율주행자동차사고책임배분문제 가. 현행자동차사고책임배분과보험법제쟁점 1) 자동차사고배상책임 : 이원적체계 ( 대인사고 / 대물사고 ) 현행법에서자동차사고는대인사고와대물사고에대해이원적배상책임체계를두고, 대인사고에대해서는조건부무과실책임, 대물사고에대해서는과실책임에따라배상책임을인정하고있다자동차사고로인하여 사망 또는 부상 이발생하는대인사고의경우현행 자동차손해배상보장법 에따라자동차를자기를위하여운행한자가책임을지도록하고있다. 다면운행자가면책사유를입증하는경우책임을면하게되나사실상매우어려운것이현실이다. 또한대물사고인경우에는 민법 제3조에따라자기를위하여자동차를운행하는자의손해배상책임을지고있다. 이에따라자기를위하여자동차를운행하는사람은자동차운행에따른대인및대물사고로인한형사및민사상의책임의무가있고, 사고발행으로인한운전자의위험을회피하고, 피해자의보를위하여자동차손해배상법애자동차종합보험에의무가입하도록하고있고, 관련법령에서가입을독려하고있다. 현행자동차사고에대한책임배분방식은대인사고인경우에는운행자에게조건부무과실책임을지우고, 대물사고인경우에는민법상의과실책임의무에따라책임이배분되고있다. 이에따라의무가입한보험에따라피해자에대한우선변제를통해피해자를우선보호하고있다. 2) 대인사고에대한엄격책임의법리적근거 교통사고를원인으로하는손해배상책임은기본적으로민법상불법행위책 임에해당하고, 과실책임의원칙이적용된다. 과실책임원칙이란가해자가자
260 202 기의과책 ( 즉, 고의또는과실 ) 에기하여타인에게손해를가한경우에만그에대한배상책임을부담한다는원칙을의미한다. 즉, 가해행위와손해라는결과가있다하더라도이것이그행위자의귀책사유로인한것인경우에만책임을부담한다는의미 96) 이다. 과실책임주의는자기의과책에대해서만책임을부담하게함으로써사회일반의주의를촉진하고, 불법행위를예방 억제하며, 아울러과실을매개로한가해자에대한제재로서의기능도담당한다. 그러나복잡하고다양해지는사회현상의발현에따라과실책임주의만으로해소가어려운손해관련분쟁이발생하게됨에따라과실이존재한다는점이입증되지않더라도일정한경우그행위와손해발생사이에관계가있으면그것만으로손해배상책임을지우는무과실책임내지엄격책임의법리가대두되었다. 무과실책임법리에의하면과실이없더라도책임을져야하는경우가발생하는데, 이경우누구에게책임을부담시킬것인지와관련하여보상책임원칙 ( 이익을얻는과정에서타인에게손해를가한자는그이익에서배상하는것이공평하다는입장 ) 과위험책임원칙 ( 타인의법익을현저하게위태롭게할위험원을지배하는자에게장래그로부터발생할손해에대한배상책임을지우는입장 ) 이제기되었다. 현재이러한엄격한법리를적용하는손해배상제고는자동차사고와관련된자동차손해배상책임법과고도의위험을수반하는원자력및항공운송관련산업분야의손해배상책임제도가이에해당된다. 자동차사고의경우는위와같은원자력 항공기와달리, 위험원인자동차에대한소유권및관리권한이개별적인자동차보유자에게귀속되고있다. 그러나자율주행자동차의경우자동차가보유자가사실상운행으로인한위험을관리, 통제할수있는방법이제한적이라는점에서, 자율주행자동차보유자가위험원을관리하는자의지위에있다고볼수있을지가분명하지않다. 96) 대체로 19 세기이전에는결과책임주의 ( 즉, 일정한손해를일으킨자는그형식상의요건만갖추어지면그결과에대한책임을부담한다는원칙 ) 를중심으로책임법제가형성되었으나, 근대민법제정이후에는결과책임주의가퇴조하고과실책임의원칙이확립된다.
261 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 203 이에따라자율주행자동차의사고책임과보험법제와관련하여현행 자동차손해배상보장법 을기반으로자율주행기능별사고위험을회피할수있도록관련법령규정을검토하는방안이있다. 다른한편에서는자율주행자동차운영자의자율주행자동차위험관리및통제가제한적이기때문에제조자에게책임을강하게부과할수있도록관련법령규정을검토하는방안을고민하고있다. 나. 자율주행자동차사고에대한현행책임법제적용가능성 자율주행자동차교통사고발생시현행책임법제, 즉 운행자책임 ( 대인사고 ) 및 불법행위책임 ( 대물사고 ) 를적용할수있는지여부에대한검토가필요하다. 현행책임법제적용여부판단을위해서는, (i) 자율주행자동차사고 ( 대인사고 ) 시에도자동차보유자에게운행자책임의핵심요소인 운행지배 와 운행이익 이존재하는지, (ii) 자율주행자동차사고 ( 대물사고 ) 시운전자의민법상불법행위책임이성립될수있는지, 즉, 자기책임원칙에입각하여고의, 과실로인한행위로손해를가한경우에만배상책임을인정하는민법제750조가적용될수있는지에대해자율주행기술단계별로검토할필요가있다. 1) 자율주행중대인사고 : 자배법상 운행자책임 의적용가능성자배법은 자기를위하여자동차를운행하는자, 즉 운행자 를책임주체로정하고있다. 자기를위하여 라함은자동차운행에대한지배권 ( 운행지배 ) 과그운행에의한이익 ( 운행이익 ) 이자기에게귀속된다는의미이다. 운행이익이란차량의운행으로부터나오는이익을의미함. 여기에는운행으로부터직접얻어지는경제적이익은물론이고간접적인의미의경제적이익과소위정신적만족감 ( 정신적이익 ) 도포함된다. 97) 운행지배란자동차를자기의실력적지배하에두고사실적인처분권을가 97) 박세민, 판례를통한자배법제 3 조의운행자개념의분석, 비교사법제 6 권 1 호 ( 통권 10 호 ), 한국비교사법학회, 1999, 제 477 면
262 204 지고자동차의운행과관련하여현실적으로자동차를관리 운영할수있는것을의미함. 98) 대법원판례는운행지배의개념을현실적지배에서규범적지배가능성으로확대함으로써, 운행자개념을확대하여궁극적으로는피해자를보호하고자하고있다. 99) 자율주행자동차사고의경우자동차보유자의운행이익과운행지배가인정되는지여부가문제된다. 이는, 각자율주행단계별로나누어살펴보아야하고, 정상적인운행의경우와비정상적운행의경우로나누어살펴보아야한다. 운행이익과관련하여, 정상적인운행의경우에는자율주행자동차의운행이익은자동차보유자에게있다고볼수있음. 이는직접탑승하는경우는물론제3자에게자신이보유하는자율주행자동차를제공한경우도마찬가지이다. 다만비정상적인경우 ( 예, 시스템오류로인해운행자가설정한목적지가아닌다른목적지를향해운행하던중에교통사고가발생한경우 ) 에는운행자의운행이익이상실되었는지여부를개별적으로판단할필요가있다. 예컨대, 자율주행시스템오류로인해탑승자가원하는목적지에도달하지못하고오히려자동차에감금되는상황에서, 그자동차의보유자라는이유만으로운행이익을얻었다고볼수는없다. 운행지배와관련하여, 비정상적인운행의경우에는자동차보유자의운행지배가상실된다고볼수있고, 정상적인운행의경우에도자율주행단계에따라서는운행자의운행지배를인정하기어려운경우가발생할수있다. 따라서 L1~L4 까지각단계별로운행자의운행지배가유지될수있는지를나누어살펴보아야한다. L1~L3 단계에서는자동차보유자의운행지배가인정될수있으나, L4 단계에서는자동차보유자의단독운행지배를인정하기어렵고, 자동차보유자와자율주행자동차하드웨어제조사또는자율주행시스템제공자 ( 이하통칭하여 제작사 라함 ) 100) 가공동의운행지배를갖는다고볼수있다. 98) 박세민, 전게논문, 제 478 면 99) 박세민, 전게논문, 제 483 면
263 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 205 L1, 특정기능의제한적자동화 (Function-Specific Automation) 상태에서는, 현재와마찬가지로 운전 행위의주체는여전히 운전자 이고그운전자를통해자동차운행과관련된위험을관리하고통제하는주체는 운행자, 즉자동차보유자라고볼수있다. L2, 복합적기능의자동화 (Combined Function Automation) 상태는운전자가조향장치및가속장치를직접작동하는것은아니지만, 항상운전자의주의관찰이필요하고필요시수동으로전환하여야하는바, 이경우역시 운전 행위의주체는 운전자 이고, 운행관련위험의관리, 통제주체는 운행자 이므로, 자동차보유자의운행지배가유지된다고볼수있다. L3의부분자율주행 (Limited Self-Driving) 상태는자율주행시스템이전방주시, 조향장치, 가속장치를통제하여자율주행이가능하지만, 운전자의제어가필요한경우운전자가수동전환하여통제를하여야하는바, 이경우역시비상상황인지여부에대한판단및비상시통제의주체가운전자이므로, 자율주행시스템의장애가사고발생에영향을미친경우자동차보유자가제작사를상대로제조물책임또는이와유사한책임을물을수있음과는별개로, L1, L2 와마찬가지로자동차보유자의운행지배가유지된다고볼수있다. L4의완전자율주행 (Full Self-Driving Automation) 상태는운전자의개입이전혀없이자율주행이이루어진다. L4 단계의완전자율주행자동차에는수동의가속장치와조향장치자체가없고, 운전자는단지목적지만설정할뿐이다. 이러한경우운전자가목적지및그에따른운행경로를선택한다는점에서일정부분운행지배를갖는다고볼수있으나, 실제운행과정은자율주행시스템이지배하고있다. 이경우자율주행시스템을관리, 통제하는자율주행자동차제작사도운행지배의주체가된다고볼수있고, 따라서자동차소유자와자동차제작사가공동의운행지배를갖는다고볼수있다. 101) 100) 자율주행자동차하드웨어제조사와자율주생시스템제공자는동일할수도있고, 상이할수도있으나, 이하에서는자율주행자동차보유자에대비되는개념으로자율주행자동차의자율주행기능을관리, 통제할수있는지위에있는자를지칭하는의미로사용함.
264 206 요컨대, 자율주행의단계가높아질수록현행의자동차보유자에게운행자책임을부담시키기어려운측면이발생하므로, 자율주행사고시적정한책임배분을위해서는제작사를단독또는공동의책임주체로삼는새로운법제가필요하다. 2) 자율주행중대물사고 : 민법상불법행위책임등적용가능성 L1, L2 단계의경우, 자동화장치를이용하지만운전의주체는여전히운전자이고운전자는자동화장치가정상적으로작동하여안전운전에문제가없는지주의를기울여야하므로, 만약이러한주의를기울이지않아사고가발생한경우에는운전자의불법행위책임및그운전자를고용한자동차보유자등의사용자책임이성립될수있다. 다만, 운전자가충분한주의를기울였음에도불구하고자동화장치의하자로사고가발생한경우에는제작사책임문제가발생할수있고, 이경우현행제조물책임법등이적용된다. L4 단계의완전자율주행자동차의주행중사고또는 L3 단계의자율주행자동차의자율주행중사고 ( 이하완전자율주행자동차의주행중사고및자율주행자동차의자율주행중사고를 자율주행사고 라함 ) 의경우자율주행과관련된장치들 ( 레이더, 카메라등, 이하 자율주행장치 ) 의하자또는자율주행을가능하게하는인공지능시스템 ( 이하 자율주행시스템 ) 의하자가사고발생의 101) 참고로, 공동운행지배를인정한대법원판례를살펴볼필요가있음. 대법원은자동차대여업자로부터자동차를임차하면서그운전사를소개받아운행중야기된충돌사고로자동차임차인과그처가피해를입게된경우에자동차대여업자가자동차임차인과공동운행자의관계에있다고보았음. 이경우임차인이자동차에대한현실적지배를하고있었지만, 자동차의운행경위, 운행의목적, 자동차대여업자가임차인에게운전사를소개하여자동차를대여하게된사정, 자동차의운행에운전사를통하여자동차대여업자가간여한정도등모든정황을종합하여볼때, 운행지배및운행이익이임차인에게전부이전된관계가아니라서로공유하는공유자의관계에있어서, 대여업자는여전히운전사를통하여자동차를직접적으로지배한다고보고그손해배상책임을긍정하였음 ( 대법원 선고 91 다 42388). 위와같은판례에비추어볼때구체적사정에따라서공동의운행지배를인정할필요성및가능성이있는경우공동으로운행자책임을부담하는것도법리적으로가능함.
265 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 207 원인일가능성이높고, 이에대한운전자의통제 관리가능성은극히제한적이다. 현재의자동차사고는 90% 가운전자과실에의한사고인반면, 완전자율주행자동차의경우운전자는자율주행장치의점검및자율주행시스템정기업데이트등의제한적인주의의무만을부담할뿐이므로, 운전자의과실이직접적원인이되어사고가발생할가능성은매우낮다. 따라서대물사고에대하여과실책임원칙을적용하는현행법제상대물사고피해자는운전자및자동차보유자에게손해배상을청구할수있는근거가없고, 따라서운전자및그자동차보유자의보험으로피해를보상받을수없다는결론에이르게된다. 자율주행장치및자율주행시스템의하자로인한자율주행사고 ( 대물사고 ) 의경우에는피해자는자율주행자동차제작사에대하여손해배상을청구하게되나, 제조물책임법및민법상요건입증이현실적으로곤란하다. 제조물책임법은제조사에게일종의무과실책임을부담하도록하고있다. 그러나, (i) 제조물책임법은자율주행자동차와같이도로를운행하며제3자에게위해를가할수있는상시적인위험원을대상으로입안된것이아니라, 제조물이그에합당한안전성을갖추지못한예외적인경우에적용하기위한법령인바, 자율주행사고에그대로적용하기에는적합하지않고, (ii) 제조물책임이성립되기위해서는 제조물 의 결함 을소비자가입증하여야하는데, 자율주행자동차또는자율주행시스템이제조물에해당하는지여부가불분명하고, 그결함의존재를입증하는것도현실적으로매우곤란하다. 다. 완전자율주행자동차의책임배분 1) 완전자율주행자동차의책임법제현행운행자책임중심의자동차배상책임법제는완전자율주행시대에적합하지않다. 앞서살펴본바와같이자율주행사고의경우자배법의운행자개념의해석상운행자와제작사가공동으로운행지배를갖는다고볼수있다.
266 208 그러나운행지배의주체가누구인지를확정하는문제를법해석에만맡겨둘경우, 자동차사고시책임소재가불분명해질수있고, 자배법상보험가입의무자의확정, 보험금분담등각종문제가발생할수있다. 따라서, L1~L3 단계에서는현행책임배분법제를적용하여자동차보유자가피해자에대한 1차책임을부담하고제작사에구상을청구하는 2단계책임배분구조를유지하더라도, 완전자율주행시대에는변화된환경및상황에적합한새로운책임법제를마련할필요있다. 완전자율주행시대의책임배분법제를마련함에있어서는다음과같은사항을고려할필요가있다. - 피해자보호및자율주행자동차관련산업의육성 - 제작사책임과자동차보유자책임의관계및주된사고책임자확정 - 자동차보험제도의현실적운영방안 - 각국의책임법제및국제협약 2) 피해자보호및자율주행자동차관련산업의육성자배법상운행자책임및교특법상종합보험가입면책제도는모두교통사고피해자에대한신속 적정한피해보상을그목적으로한다. 자율주행사고책임배분을검토함에있어서도피해자보호를가장우선하여고려하여야한다. 다만, 피해자보호를위해제작사에게과도한책임을부과시킬경우자율주행자동차산업의발전을저해할가능성이있다. 따라서피해자보호에충실하면서도자율주행자동차산업발전이가능한방향으로책임배분제도마련이필요하다. 3) 제작사책임과자동차보유자책임의관계및주된사고책임자확정자율주행자동차사고, 특히수동가속장치와조향장치등이존재하지않는완전자율주행자동차사고의경우, 그사고에대한책임주체를제작사로볼것인지, 자동차보유자로볼것인지에대한논쟁이불가피하다.
267 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 209 현재자동차사고의경우운행자또는실제운전자의과실에의한경우가대부분이므로운행자에게조건부무과실책임을부담하도록하더라도구체적타당성이결여되지않는다.. 즉, 도덕적비난가능성과법적책임의불일치가발생하지않는다는것이다. 그러나, 자율주행사고의경우에는운전자의과실이개입될가능성이없거나매우낮고, 자율주행자동차자체의결함이나그자율주행시스템의결함이사고의원인이될가능성이높은바, 자동차보유자에게무과실책임을부담하도록할경우구체적타당성이없고, 책임법제를통한사고예방의효과도얻을수없다. 자율주행사고시책임배분법제에서가장중요한문제는자율주행사고시사고피해자에대한 1차적책임을누가부담하도록할것인가의문제이다. 자율주행사고의경우 (i) 현행법제상대인사고시운행자책임은적용가능하나, 운행자가누구인지 ( 자동차보유자인지, 자동차제작사인지, 공동운행자인지 ) 의문제가제기되고, (ii) 대물사고시자율주행사고의과실이누구에게있는지가불분명하기때문에과실책임원칙이적용되는민법제750조적용이곤란해지며, 운전자에대한사용관계를전제로하는민법제756조도적용될수없다. 따라서완전자율주행시대에는자율주행사고가발생한경우대인사고및대물사고모두에대한 1차책임자가누구인지를우선확정해야한다. 자율주행사고가발생한경우제작사가책임을부담하여야한다는점에는대체로견해가일치하나, 제작사가부담하는책임의법적근거및교통사고피해자에대한직접책임부담여부에대해서는아직구체적인방안이제안되지못한상태이다. (i) 자율주행사고의경우자율주행장치또는자율주행시스템의결함이주된사고원인임이예측된다는전제에서, 자율주행자동차의제작사가교통사고에대한책임주체가되어야한다는견해와 (ii) 자율주행사고의경우에도자동차보유자가운행지배와운행이익을갖는다는점은현재와동일하므로현행과동일하게운행자가교통사고에대한책임을부담하고, 운행자는제작사에대해제조물책임법 ( 또는자율주행자동차의하자에관한책임에대하여별도로마련된법령 ) 에의해구상권을행사하면된다는견해등이가능하다.
268 210 손해배상책임에관한기본적인법리를해치지않으면서동시에피해자보호를약화시키지않는방향으로양자의책임을조화시킬필요가있다. 자율주행자동차보유자의자기신체사고및자차사고에대한책임법제도입도함께고려되어야한다. 현행법상자기신체사고또는자차사고가발생한경우이는자기과실에의해발생한손해이기때문에이에대한별도의책임법제가마련되어있지않고, 예외적으로제조물책임법또는국가배상법등의요건에해당하는경우에만배상이가능하다. 그러나, 자율주행사고의경우자동차보유자또는운전자자신의과실에의해발생한손해라고볼수는없고, 오히려보유자등은사고피해자에해당한다. 또한, 자율주행자동차제작사측의과실은입증이불가능하며, 제조물책임법상책임은자기신체손해에대한책임에는적용이가능하나자차사고에대해서는적용이되지않는등의문제점도있다. 102) 4) 자동차보험제도의현실적운영방안교통사고피해자에대한실질적인구제기능은자동차보험 ( 의무보험및종합보험 ) 이수행하고있다. 따라서자율주행사고에대한책임법제를마련함에있어관련보험제도운영의측면을고려하여야한다. 교통사고피해자구제와관련된대인배상및대물배상보험은그성격이책임보험, 즉피보험자가제3자에게배상책임을지는경우이를보상하는보험인바 103) 책임보험의특성상법적책임의주체가보험가입의주체가된다. 따라서양자를분리해서생각할수는없고, 결국자율주행사고의법적책임을부담하는자가보험가입의무도부담하게된다. 책임법제자체는불법행위책임및손해배상에관한법리상타당하더라도, 실제그러한책임법제가보험제도와연결되어피해자에대한실질적보상으 102) 제조물책임법제 3 조 ( 제조물책임 ) 1 제조업자는제조물의결함으로생명 신체또는재산에손해 ( 그제조물에대하여만발생한손해는제외한다 ) 를입은자에게그손해를배상하여야함. 103) 상법제 719 조
269 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 211 로귀결되지못한다면그와같은책임법제는제기능을다하는것이라고볼 수없다. 5) 자율주행자동차관련각국법제및국제협약미국, 유럽, 일본등주요자동차생산국가들은자율주행자동차관련제도를도입 정비하고있는바, 자율주행자동차관련해외의법제도변화의흐름을주시하여국제적기준에부합하는법제도를마련할필요가있다. 자동차의운행과관련하여서는도로교통에관한제네바협약 (1949년 ) 과도로교통에관한비엔나협약 (1968 년 ) 등국제협약이마련되어있고, 우리나라는 1971년제네바협약에가입하였다. 제네바협약은운전자, 104) 자동차등에대한정의규정을두고, 차량에는항상운전자가있어야하며, 운전자는운전과관련하여각종주의의무를부담한다고정하고있다. 105) 자율주행자동차가상용화될경우위와같은운전자의주의의무에관한제네바협약의내용은자율주행자동차와관련하여서는상당부분수정내지변형될필요가있다. 미국은현재네바다, 캘리포니아등에서자율주행시험주행이이루어지고있고, 시험주행을위한법제가도입되어있으나, 완전자율주행자동차도입시의법제도에대해서는아직완성도있는연구가나오지않고있다. 미국도로교통안전국 ( 이하 NHTSA 106) 라함 ) 은자율주행자동차시험운행요건지침을마련하고, 이에따라개별주가시험운행관련법규정을마련하여시행하고있다. 현재네바다, 워싱턴 DC, 플로리다, 미시건, 캘리포니아, 콜로라도주가시험주행을위한법규를제정하였고, 나머지주들은입법을추진하고있다. 107) 미국의 NHTSA 는구글의자율주행자동차인공지능시스템을연방법체제에 104) 도로상에서차량을운전하거나또는견인용, 적재용또는승용에사용되는동물또는가축의무리를인도하는자또는이를실제로통제하는자 ( 제네바협약제 4 조 ) 105) 제네바협약제 8 조내지제 12 조 106) National Highway Traffic Safety Administration 107) Regulatory_ Action( )
270 212 서 운전자 로인정할수있다고밝히고있다. 운전자, 즉실제운전을담당하는자는 사람 이어야한다는기존의관념을깨고, 인공지능도 운전자 가될수있다고밝힌것이다. 그러나이는자율주행자동차가자동차에는반드시운전자가있어야한다는기존의연방법체계에부합하지않기때문에만들어낸이론인것으로보이고, 실제로자동차관련법규상 운전자 를인공지능으로대체할수있다는취지는아닌것으로생각된다. 유럽도 Gear 2030 에서자율주행자동차관련제도를연구중이다. 유럽집행위원회는자율주행자동차들이야기한충돌사고에대한보장을위해보험법개정이필요한지를논의하고있다. Gear 2030에속하는워킹그룹은 완전자율주행자동차상용화시자동차사고에대한손해배상책임을누가부담할것인지에대하여논의를하였다. 유럽의회법사위원회 (JURI) 는 자율주행자동차관련보고서초안을발표하였으나, 자율주행자동차제작사와보유자중누가법적인책임을부담할것인지에대해서는아직확정하지않은것으로보인다. 108) 자율주행중사고발생시책임및관련보험제도에대한해외의법제도가형성되어가는과정을주목할필요있으나, 사고책임및관련보험제도의경우 ( 자동차의성능, 안전, 운행과관련된사항과는달리 ) 반드시유럽또는미국의경우와일치시켜야하는것은아니므로, 해외의동향을참고하여우리나라의실정에맞는제도를마련해나갈필요가있다. 현재자배법상운행자책임및의무보험에관한규정도해외의책임법제나보험제도와크고작은차이점이있다. 예컨대, 미국의경우일부주는의무보험제도를두고있으나대부분의주는배상자력의무제도만을두고있다. 108) EU considers new insurance laws for driverless cars, EurActive,
271 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 자율주행사고책임배분법제 ( 안 ) 1) 제1안 : 자동차보유자가 1차책임을부담하는방안이방안은자율주행사고시자동차보유자가현행운행자책임과동일 유사한조건부무과실책임을부담하도록하는방안이다. 자동차보유자는자율주행자동차의운행여부, 운행목적지, 운행경로등을스스로설정하므로운행형태가자율주행이라하더라도여전히운행지배를갖고, 이를통해운행이익을얻는자이므로, 그운행으로인한사고에대해서책임을부담하는것이타당하다는논리에입각한방안이다. 자율주행은자동차보유자가인공지능으로하여금운전을하게하는것이므로, 현행법제상운행자가운전사를고용하여자동차를운행하는것과형태가유사하고, 따라서이경우에도자동차보유자의운행자성은유지된다고볼수있다. 만일자율주행시스템의결함에의해자율주행사고가발생한경우, 이는현행법제상운전사의과실로교통사고가발생한경우와유사하게취급하여, 그고용주이자운행자인자동차보유자가책임을부담한다고볼수있다. 이경우, 운행자가운전자에게민법제750조에근거하여구상을청구할수있는것과마찬가지로운행자는자율주행자동차제작사를상대로제조물책임 ( 또는이와유사한별도법제에의한책임 ) 에근거한구상을청구할수있다. 운행지배개념과관련하여대법원은피해자보호를위해현실적인지배에국한하지않고그의미를규범화시킴으로써운행자범위를확대하고있는바, 이처럼운행지배의의미를규범적으로파악할경우자율주행시에도자동차보유자가여전히운행지배를갖는다고볼수있다. 다만, 현행자배법상운행자책임은대인사고에만적용되어자율주행사고시대물사고에대한책임주체가불분명해지는바, 자율주행사고시에는대인사고및대물사고모두에대해서자율주행자동차의보유자가 1차책임을부담하도록할필요있다. 그러나이방안은자동차보유자를 1차책임자로볼경우, 과실책임원칙
272 214 및위험책임원칙과는부합하지않는측면이있다. 완전자율주행자동차의경우자동차보유자는자동차를소유하고운행명령을내리지만, 운행과정에대한통제권한은전혀가지고있지않다. 실질적으로운행과정에대한통제권은인공지능인자율주행시스템이가지고있고, 그시스템이라는위험을실질적으로관리하는자는시스템제공자이다. 또한, 시스템이제대로작동하기위해서는그시스템에각종정보를입력하고그시스템의명령을수행하는자율주행장치가제대로작동하여야하는데, 운행자가직접운행을하지않기때문에자율주행장치가정상작동하고있는지를매번점검할것을기대하기어려움이있다. 따라서자율주행자동차의보유자는자율주행자동차의안전한운행및사고방지에관여할가능성이거의없고, 따라서사고를예방할주의의무의주체가된다고볼수없어, 과실책임원칙은물론위험책임의원칙상으로도보유자에게책임을부과하는것은부당하다. 또한자율주행사고발생시항상 2단계배상절차를거쳐야하는등절차사항의비효율이발생한다. 자율주행사고는그사고의성격상운행자의과실과관련이없고대부분자율주행시스템또는자율주행장치가원인일것인바, 운행자가 1차적책임을부담할경우운행자는피해자에게손해를배상한뒤거의모든경우제작사에구상책임을청구하게된다. 따라서, 모든교통사고에대하여 2 단계의배상절차를거칠수밖에없어사회적비용의낭비가발생할우려가있다. 2) 제2안 : 제작사가 1차책임을부담하는방안제작사가자율주행자동차보유자에대한제조물책임 ( 또는별도의근거법령에의한책임 ) 을부담하는데그치지않고, 교통사고피해자에대하여 1차적이고직접적인보상책임을지는방안이다. 자율주행사고의원인이자율주행장치또는자율주행시스템의결함일가능성이높으므로, 실질적으로그와같은사고원인을통제, 관리할수있는지위에있는자가직접배상책임의주체가된다는점에서민법상불법행위책임에관한일반원칙인과실책임의원칙및위험책임의원칙에부합한다.
273 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 215 자율주행자동차가교통사고를일으킨경우일단제작사가사고피해자에대해 1차적손해배상책임을부담하되, 제작사가일정한면책사유 ( 예컨대, 자동차보유자가정기적인자율주행장치점검또는자율주행시스템업데이트의무등을소홀히하였다는점등 ) 를입증한경우그배상책임을면하도록하는방안이가능하다. 소비자는자율주행자동차를구매함으로써그자율주행자동차와관련된사고의위험을제작사에게이전할수있어자율주행자동차에대한선호도가높아져산업발전에도긍정적인영향을미칠수있다. 제작사는자율주행자동차판매대금외에도자율주행시스템업데이트또는자율주행장치정기점검등에비용을부과함으로써위자율주행사고시배상및관련보험가입을위한재원을마련할수있다. 그러나자율주행사고에대한책임이소수의제작사에게집중될경우피해자보호가약화될우려가있다. 교통사고피해자보호를위해서는보험제도를통한피해자보호가반드시필요하고, 보험을통해피해자를보다두텁게보호하기위해서는손해발생으로인한손실을적절히분산시킬필요가있다. 자율주행자동차관련산업은높은수준의안전성이요구되는사업이므로, 제작사에대해서는그설립, 운영 ( 자율주행자동차의설계, 제작, 판매, 판매후관리등 ) 및소멸의각단계에서각종행정적규제와안전기준이마련되어야할것이고, 특히자율주행시스템의안전성과지속성을담보하기위한각종규제방안이마련되어야할것이나, 자율주행자동차산업자체가국유화되지않고사기업이이를담당하는이상파산, 해산등으로인해당해기업이소멸할위험이존재한다. 당해기업이소멸하더라도당해자율주행자동차는여전히운행을계속할수있는바, 이경우사고가발생해도책임을부담할주체가존재하지않게되는문제점이있다. 한편, 자율주행시스템의오류등으로인하여갑작스럽게특정종류의자율주행자동차가모두비정상적으로주행을할경우, 개별적인자동차사고의수준을넘어서는대규모위험이발생할수있고, 이는항공기사고나원자력사
274 216 고못지않은대규모재해로이어질수있다. 이러한경우에배상책임을소수의제작사가부담하도록할경우, 피해자에게충분한배상이이루어지지못하게될위험이있다. 따라서자율주행자동차사고관련책임을제작사에게집중시킬경우에는앞서살펴본원자력사고손해배상과같이, 관련보험등을통해서도제작사가배상책임을다이행하지못할경우국가, 또는관련기금에서이를보상하도록하는방안이함께마련되어야한다. 3) 제3안 : 소유자와제작사가공동책임을부담하는방안자동차보유자는자율주행의경우에도운행이익과운행지배를갖는다는점, 제작사역시자율주행장치및자율주행시스템의설계, 제작, 공급및관리등의전단계에서자동차사고에직 간접적인원인을제공할뿐아니라실질적으로자율주행사고를통제하고관리할수있는유일한지위에있는자인점을고려한다면, 양자모두자율주행사고에대하여책임을부담하는것이타당하다. 자율주행사고시에는자동차보유자및제작사가모두책임의주체가되도록함으로써자율주행사고피해자는자동차보유자에대해서도, 제작사에대해서도손해배상책임을물을수있도록하는방안을도입할수있다. 이경우, 과실책임및위험책임의조화를도모할수있고, 피해자보호도더욱강화되는장점이있다. 소유자와제작사는공동불법행위의경우와같이일단피해자로부터청구를받은자가전액배상책임을부담하고, 추후내부관계에서손실을배분할수있다. 그러나소유자와제작사가공동책임을부담할경우보험제도운용상의문제가발생할수있다. 교통사고피해자에대한실질적구제및보상은보험을통해서이루어지는바, 자배법상책임주체가단일화되지않고공동책임형식을취하게되면피해자에게혼란을초래할수있고, 이와관련된의무보험및책임보험도이중으로운영이되어야하므로보험제도운영상문제점이발생할수있다. 다만, 실제제1안 ( 보유자책임부담 ) 에의하더라도제작사는보유자에대하
275 제 5 장자율주행자동차윤리및수용성쟁점과대응방향 217 여제조물책임 ( 또는이와유사한별도의책임 ) 을부담함이타당하고, 보유자의구상청구에대비하여생산자책임보험에가입하여야하며, 자율주행장치및시스템의결함에대한입증곤란성을고려할때실제위생산자책임도무과실책임에가깝게운영됨이타당하다는점등을감안하면제작사가직접피해자보호를위한자동차배상책임보험에가입하도록하는것과구상책임이행을위한생산자배상책임보험에가입하도록하는것은실무상큰차이가없을가능성이있다. 특히제작사의구상의무의존부는자동차사고원인과직접관련이있으므로, 사고원인에대한조사등의과정에제작사및제작사측보험회사가참여하도록하는것이구체적타당성및향후사고예방등의측면에서더욱타당할수있다.
276 218 제 6 장결론및정책건의 제 1 절결론 자율주행자동차는자동차기술의패러다임을바꾸고있으며, 미래신성장동력의핵심으로세계적인관심을끌고있다. 본연구에서는주요선진국에서활발히추진하고있는자율주행자동차기술개발동향과윤리, 수용성과책임등의쟁점을살펴보고대응방향을제시하고자하였다. 현재자율주행자동차기술개발의발향은전통적인자동차제작사를중심으로한개인이동수단으로써의자율주행자동차개발방향과 IT 및기타니치교통수단사업자를중심으로한도시교통환경서비스를위한자율주행자동차기술이개발되고있는것으로파악되었다. 기술적인측면에서자율주행자동차의분류는 SAE 기준으로수렴해가고있는것으로나타났다. SAE 에서정의하고있는자율주행자동차는 0단계에서 5단계로구분되고있다. SAE 정의에의한 4~5단계자율주행자동차는주행중운전자의역할이매우낮거나아주필요없는수준의기술이라고할수있다. 이들기술은운행과관련된의사결정을시스템이하게되며, 예상치못한상황에서의윤리적선택에대한문제를어떻게해소할것인가에대한문제가대두되었다. 본연구는또한자율주행자동차의윤리알고리즘에대한문제제기를하고윤리문제에있어사회적합의가이루어질수있는가에대해실험을통해고찰하였다. 실험에서는윤리문제에대한일반적이고공통적인의견이형성되는
277 제 6 장결론및정책건의 219 것으로나타났다. 또한극단적으로이기적이거나이타적인참가자들이사회적영향이피드백됨에따라의견을변경하는지확인하였다. 이를통하여자율주행자동차윤리문제의사회적합의를이루기위한다양한정책설명과이해를돕는홍보활동의효과성을입증할수있었다. 자율주행자동차에대한수용성조사결과, 일반국민의 50% 이상은자율주행자동차에개한기대와이용의사가있지만, 아직까지는자율주행시스템의고장등자동차안전에대한우려가큰것으로나타났다. 또한자율주행자동차에대한사회적수용성에서자율주행자동차기능별혹은기술단계별이용의사조사결과에따르면, 자율주행자동차개별기술과단계별기술에서많은응답자들이의사를결정하지못하고있는패턴을보였다. 3단계및 4단계의자율주행자동차, 완전자율주행버스및택시이용의사에대해보통이라고한응답자는약 30% 대인것으로나타났다. 따라서향후자율주행자동차상용화에수반된자율주행자동차보급정책추진에앞서자율주행자동차수용성향상을위한정책을추진할필요가있다. 영업용자동차운전자는일반인에비해자율주행자동차에대한부정적인의견이다소높은것으로나타났다, 특히택시운전자의경우특정수용성문항에서버스및화물트럭운전자에비하여부정적인견해를보인바있다. 이들항목은택시영업과밀접한관련이있는항목으로판단되며, 향후자율주행택시서비스의등장에따라택시운전자들과의충돌이발생하지않도록갈등관리에대한논의가이루어져야할것이다. 자율주행자동차윤리와관련하여, 공유자율주행자동차교통법규위반시책임소재에대한질문에서일반인의경우탑승자보다는자율주행자동차소유자, 제작사에책임이있다고응답하였다. 반면, 아무도탑승하지않은자율주행자동차가발생한사고의책임은제작사, 소유자혹은 3자모두에게책임이있다는의견이동일한비율로나타났다. 이러한의견은아직까지자율주행자동차의사고시법적책임에대한합의가이루어지지않은상태인것으로판단된다. 이에따라향후자율주행자동차
278 220 의법적책임에대한연구와논의를통한사회적합의를도출할필요가있다. 마지막으로자율주행자동차의보험개발에관한사항을자유주행자동차의기술단계별로제시하였다. 또한자율주행자동차의보험개발을위하여국가적소유자단독 1차책임방안, 제작사단독 1차잭임방안, 그리고소유자와제작사의책임방안을제안하였다. 수용성설문조사에따르면, 조사대상응답자들은이들세가지방안에대하여어느한쪽의의견을선호하지않고있는것으로파악된다. 따라서지속적인연구와논의를통해구체화할필요가있다. 제 2 절정책건의 우리정부는미래자동사산업생태계를활성화하고자동차산업의국제경쟁력을확보하기위한일환으로자율주행자동차기술개발을지원하기위한다양한지원정책을마련하여추진하고있다. 자율주행자동차의도입은단순히우리국민의자동차이용패턴에변화를미치는것뿐만이아니라사회 경제 윤리 철학등다양한분야에영향을미칠것으로판단된다. 그러나현재까지의정부지원은자율주행자동차기술에집중되어있었다. 이에따라본연구에서는자율주행자동차와관련된윤리, 사회적수용성, 법제도및보험분야의쟁점을논의하였다. 윤리, 사회적수용성, 법제도및보험책임등에관한문제는자율주행자동차가상용화되기이전에논의되고관련제도및사회적안전장치가마련되어야향후자율주행자동차의보급이원활히추진될것으로판단된다. 특히자율주행자동차관련법제도와책임법제의경우국토교통부관할법령뿐만이아니라자동차의운행과관련이있는경찰청, 방송통신위원회, 행정자치부등의다양한부처의법령이함께검토되고개선되어야한다. 이를위하여자율주행자동차만의특별법혹은개별법을제정하는문제도함께검토되어야할것이다.
279 제 6 장결론및정책건의 221 자율주행자동차의윤리알고리즘개발과관련하여단순한교통법규위반에대한윤리적판다에서부터극단적딜레마상황을아우르는윤리강령 ( 가이드라인 ) 의개발이필요하며, 이를위한자율주행자동차와관련된윤리및사회적수용성을향상을위한논의가지속적으로이루어져야할것이다. 자동차산업은국가경제에미치는영향이큰산업으로국제조화등의문제를함께고민해야한다. 현재자동차안전기준과도로교통관련분야의국제기준과국제표준을마련하기위한논의가이루어지고있으며, 우리나라도정부및민간차원에서지속적교류를통한대응을하고있다. 이에따라자율주행자동차관련안전기준과국제표준에대응할수있는준비가필요하다. 나아가우리정부가이들자동차국제안전기준과국제표준의선도를통한국가경쟁력을확보하기위해관련기준및표준과관련된국제적교류를선도가필요하다. 이에따라윤리, 사회적수용성및법제도에관한국제적논의를통한국제기준혹은표준의도출이필요한것으로판단되며, 이를전문적으로논의할수있는사회적합의를위한오픈플렛폼 (Social Acceptance Open Platform) 의구성을통해국제적인논의를선도할필요가있다.
280
281 223 참고문헌 국토해양부, 2012, 도로설계기준 권영종외 2015 신기술및고령화등교통환경변화에대응한교통정책구현로드맵수립, 한국교통연구원. 고인석, " 아시모프의로봇3법칙다시보기 : 윤리적인로봇만들기 ", 철학연구회, 철학연구, 제 93집, 2011, pp 김규옥, , 자동차와도로의자율협력주행을위한도로운영방안, 월간교통 11월호, vol. 213, 모세준외, 2015, 자율주행차핵심기술및업체전략, 한국자동차산업연구소박세민, 판례를통한자배법제3조의운행자개념의분석, 비교사법제6권 1호 ( 통권10호 ), 한국비교사법학회, 1999, 제477. 서정주, KB 지식비타민 : 스마트모빌리티 (Smart Mobility) 현황과전망, KB 금융지주경영연구소. 심수민외, , 모빌리티 4.0 시대의혁신과새로운기회, IT & Future Strategy, 제8호, 유시복, , Smart Safety 및자율주행자동차기술및국제표준현황 LG 교육자료이상용, 2016, 인공지능과계약법 : 인공에이전트에의한계약과사적자치의원칙, 비교사법제23권 4호 ( 통권 75호 ) pp.1639 ~ 이재관, 2013, 자율주행차개발동향과주요현안, 자동차부품연구원. 이중기, 2016, 자율주행자동차 : 로봇으로서의윤리와법적문제, 국토연구원. 최정단, 2016, 자율주행을위한클라우드기반의진화형정밀지도구축방안, K ama web Journal, 2016/vol.330
282 224 홍다희외, 2011, 스마트모빌리티기반의미래교통서비스구축방안, 한국교통연구원. Bonnefon, J. F., Shariff, A., & Rahwan, I., "Autonomous Vehicles Need Experimental Ethics: Are We Ready for Utilitarian Cars?", arxiv pre print arxiv: , Casly et.al., 2013, A Study of Public Acceptace of Autonomous Cars, W orcester Polytechnic Institute. David Edmonds, 2014, Would You Kill the Fat Man?, Princeton University Press. Dawkins, Richard, The Selfish Gene, New York; Oxford University Press Delphi Corporation, , Summary of Autonomous Vehicle Disengag ements, California DMV, p.2. Dimitris Milakis et. al, Scenarios about development and implic ations of automated vehicles in the Netherlands, the 95th TRB ann ual Meeting Goodall, N. "Ethical decision making during automated vehicle crashes.", Transportation Research Record: Journal of the Transportation Res earch Board, 2014, 2424, pp Jeffrey K. Gurney, , Crashing into th Unknown: An Examination of Crash-Optimization Algorithms Through the Two Lanes of Ethics and law, Albany Law Review, pp Levitt. S. & List. J., 2007, What Do Laboratory Experiments Measuring Social Preferences Reveal About the Real World?, Journal of Econo mic Perspectives, vol. 21, no. 2, spring 2007, p Lin, P., "Why ethics matters for autonomous cars. In Autonomous Driving", Springer Berlin Heidelberg, 2016, pp Martin & Cushman, 2016, Why we forgive what can t be controlled, Co gnition, 147, p Mclaren, Bruce M. 2006, Computational Models of Ethical Reasoning: Challenges, Initial Steps, and Future Directions IEEE, p Nikhil Menon et.al , Consumer Perception and Intended Adoptio
283 참고문헌 225 n of Autonomous Vehicle Technology- Findings from a University Population Survey, the 95th TRB annual Meeting OECD ITF, Urban Mobility Systme Upgrade; How shared self-driving ca rs could change cty traffic, Prateek Bansal et. al Assessing Public Opinions of and Interest in New Vehicle Technologies: An Austin Perspective, the 95th TRB annual Meeting Schoettle & Sivak, 2014, A Survey of Public Opinion about Autonomous and Self-Driving Vehicles in the U.S., The U.K., and Australia, Uni versity of Michigan Transportation Research Institute. Schroll, 2015, Splitting the Bill: Creating a National Car Insurance Fund to Pay for Accidents in Autonomous Vehicles, U.S.A, vol 109, no.3, pp. p Zmud et.al., 2016, Consumer Acceptance and Travel Behavior Impacts of Automated Vehicles, Texas A&M Transportation Institute. < 인터넷자료 > 강유현, , 가전쇼접수한차, 기아, 자율주행브랜드첫선, 동아일보 일 B1면, 접속. 백주열, 스스로달리는자동차! 자율주행자동차기술은어디까지발전해있고, 어떤기술들이필요할까? < ss/58522>, 접속스텐포드철학백서 < 언맨드솔루션 ( 주 ) 홈페이지 < 오성덕, , 도로환경정밀측량디지털지도만든다 : 지능형자동차다중센서기반표준 DB 구축 보도자료위키피디아 Three Laws of Robotics, _Laws_of_Robotics>, 접속 Liar! < 이성규, 우버한국진출에서현재까지, < 접속. 이종혁, , 자동차-집통합솔루션잇달아... 스마트시티 구상빨라진다, 서울경제, 접속.
284 226 장혜림, 우버의치솟는몸값, 기회와위기?, < 접속. 장혜림, , 스타트업이규제에대응하는 5가지현명한방식, < nding.kr> 접속. 중앙일보, , 판교도심에세계첫자율주행자차도로, < s.joins.com/article/ > 접속현대자동차공식블로그 <blog. hyundai.com> 한주엽, , 자율주행차 ADAS 핵심센서칩유럽 일본 미국장악.. 국산화요구높아져, 전자신문보도자료 Adrienne Lafrance, , The high-stakes Race to Ride the World of Human Drivers, The Atlantic, 접속. Alex Davies, , We take a ride in the Shelf-Driving Uber now Roaming Pittsburgh, Wired, 접속 Benjamin Perston, , Insurancers Brace for the Self-Driving Futur e and Fewer Accidents, the New York Times, 접속. Brian Fung 외, , These charts show who s lapping whom in the race to perfect the driverless car, The Washington Post, 접속. Carlton Reid, , Makers of driverless cars want cyclists and pedestr ians off the roads, BIKEBIZ, 접속. Chris Urmson, , How a driverless car sees the road, Ted.com, 접속. Chris Ziegler, , Ford will have way more fully autonomous resear ch cars on the road this year, The Verge, 접속. Chris Ziegler, , Let s Drive NYC is GM s new car-sharing progr am, but it s only for one apartment building right now, The Verge, 접속. Daniel Cooper, , GM quitely buys failed Uber rival Sidecar, Enga dget, 접속. David Reid 외, , Driverless cars still confused by cyclists; Renault CEO, CNBC NEWS, 접속. Digi.Key, Radar Sensing for Dirverless Vehicles (
285 참고문헌 227 m/en/articles/techzone/2016/nov/radar-sensing-for-driverless-veh icles) 접속 Eric Newcomer 외, , General Motors Salvages Ride-Hailing Comp any Sidecar for Parts, Bloomberg, 접속. EurActive, EU considers new insurance laws for driverless cars, EurActive.com, 접속. Fortne, , Elon Musk Says Tesla Vehicles Will Drive Themselves in Two Years, <www. foturne.com> 접속. Fortune, , How Tesla is ushering in the age of the learning car, <www. fortune.com> 접속. Global Auto News, , 자율주행기술과전망, < news.com/bbs/board.php?bo_table=bd_035&wr_id=101&page=12> 접속 Harris, ( ), Why California Rules the Robocar Industry pectrum.ieee.org/computing/embedded-systems/why-california-rul es-the-robocar-industry), 접속 Ina Fried, , Riding in Nissan s Self-Driving Car is Still a White-K nuckle Affair(Video), Recode. Jacques Deshaies, , Autonomous Kia Soul: Level 4 Achieved, Lev el 5 Comiing Soon, The CarGuide, 접속. James Scoltock, , Volvo works with microsoft on autonomous driving; OEM will initially use holographic systems, Automotive En gineer, 접속. Jeremy Hus, Obama s $4-Billion Self-Driving Car Plan is All abo ut Laws and Testing, IEEE Spectrum, 접속. Jonathan M. Gitlin, , Ars talks about autonomous driving with Au di, ars Technica, 접속. Lulu Chang, , General Motors is delaying its semiautonomous dri ving technology, Yahoo news, 접속. Marco Della Cava, , Ford partners with Amazon to connect carts with homes, USA Today, 접속. Matt Kwong, , Driverless cars may save lives, but will they kill dri
286 228 ving?, CNC news, 접속. Mark Bergen, , Ford Says It s the First Carmaker to Test Self-Drivi ng Cars in the Snow (But Google Has, Too), recode, 접속. Mark Harris, , Google reveals plans to increase production of self -driving cars, The guardian, 접속 , , Meet Zoox, the Robo-Taxi Start-up Taking on Goo gle and Uber, IEEE Spectrum, 접속 Martine Powers, , Congress gears up for driverless cars, POLITIC O, 접속. Megan Geuss, , Hanging out in Volvo s concept 26, a reinvente d seat for a self-driving car, ars Technica, 접속. NissanNews.com, Nissan and NASA partner to jointly develop and deplo y autonomous drive vehicles by end of year, 접속 Peter Armstrong, , Driverless cars get potential new testing groun d in Startford, Ont. CBCnews, 접속. Philip E. Ross, , California Says Driverless Cars Must Have Driv ers, IEEE Spectrum, 접속. Stephen Hall, , Report: Ford planning separate autonomous car unit, intends to use Google s self-driving software, < le.com>, 접속. Tian Ying, , Baidu Enters the Global Race for Driverless Car Domination, Bloomberg Market, 접속 Wayne Caswell , Cars for sensiors who can t drive themselv es, Morden Health Talk, 접속
287 229 부록 부록 1. 협동세미나실적 부록 2. 윤리실험지문 부록 3. 운전자수용성지문
288

289 부록 231 부록 1. 협동세미나실적 세미나 1: 일시 : 2016 년 4 월 7 일 14 시, 장소 : 대한상공회의소
290 232 <세미나 진행 전경 1> <세미나 진행 전경 2> <세미나 진행 전경 3>


291 부 록 233 세미나 2: 일시: 2017년 1월 5일 14시, 장소: 대한상공회의소 <세미나 진행 전경>
292 234 부록 2. 윤리실험지문
293 부록 235
294 236
295 부록 237 부록 3. 운전자수용성지문 1) 일반인대상설문지
296 238
297 부록 239
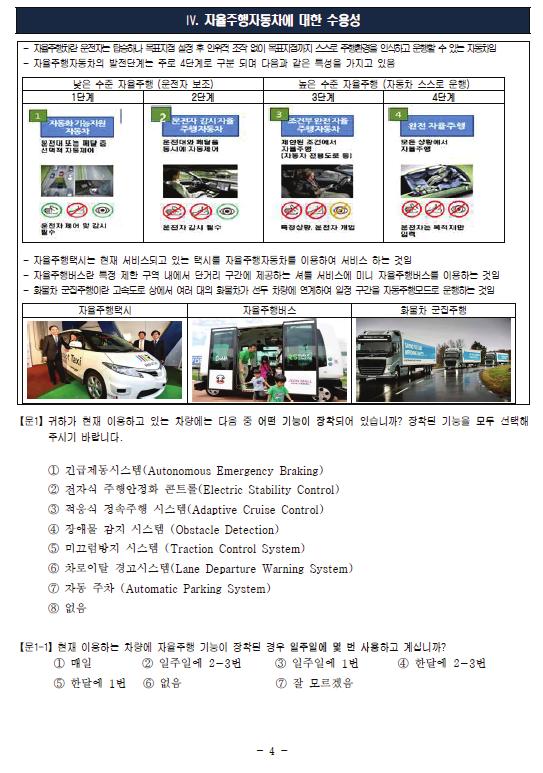
298 240
299 부록 241
300 242
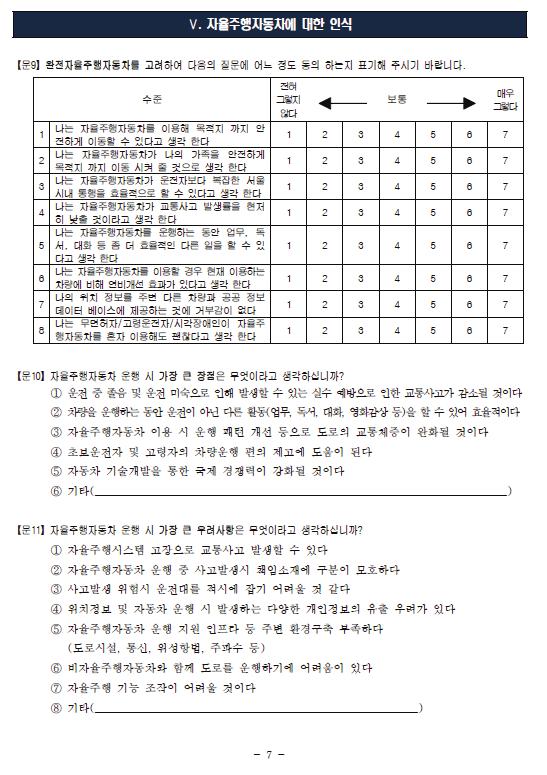
301 부록 243
302 244
303 부록 245
304 246 2) 영업용자동차운전자대상설문지
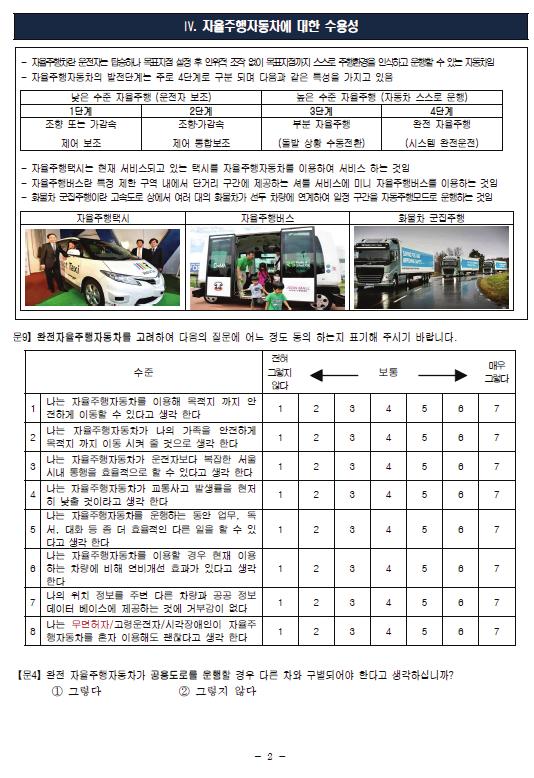
305 부록 247
2002report hwp
 2002 연구보고서 210-23 가족법상친권 양육권및면접교섭권제도의실효성확보방안연구 한국여성개발원 발간사 연구요약. 연구의목적 . 가족법상친권 양육권및면접교섭권제도의내용 1. 친권에관한검토 2. 양육권에관한검토 3. 면접교섭권에관한검토 4. 관련문제점 . 가족법상친권 양육권 면접교섭권제도의시행현황 1. 공식통계를통해본시행현황 2. 친권 양육권 면접교섭권관련법원실무
2002 연구보고서 210-23 가족법상친권 양육권및면접교섭권제도의실효성확보방안연구 한국여성개발원 발간사 연구요약. 연구의목적 . 가족법상친권 양육권및면접교섭권제도의내용 1. 친권에관한검토 2. 양육권에관한검토 3. 면접교섭권에관한검토 4. 관련문제점 . 가족법상친권 양육권 면접교섭권제도의시행현황 1. 공식통계를통해본시행현황 2. 친권 양육권 면접교섭권관련법원실무
2016년 신호등 4월호 내지A.indd
 www.koroad.or.kr E-book 04 2016. Vol. 428 30 C o n t e n t s 08 50 24 46 04 20 46,, 06 24 50!! 08? 28, 54 KoROAD(1)! 12 30 58 KoROAD(2) (School Zone) 16 60 34 18 62 38, 64 KoROAD, 40 11 (IBA) 4!, 68. 428
www.koroad.or.kr E-book 04 2016. Vol. 428 30 C o n t e n t s 08 50 24 46 04 20 46,, 06 24 50!! 08? 28, 54 KoROAD(1)! 12 30 58 KoROAD(2) (School Zone) 16 60 34 18 62 38, 64 KoROAD, 40 11 (IBA) 4!, 68. 428
학위논문홍승아.hwp
 印 印 印 - iv - - v - - vi - - vii - - viii - -1- -2- -3- -4- -5- -6- - -7- vii - - -8- viii - -9- 1) --10- x - --11- xi - --12- xii - -13- -14- -15- -16- -17- -18- -19- -20- --21- xxi - -22- - -23- xxiii
印 印 印 - iv - - v - - vi - - vii - - viii - -1- -2- -3- -4- -5- -6- - -7- vii - - -8- viii - -9- 1) --10- x - --11- xi - --12- xii - -13- -14- -15- -16- -17- -18- -19- -20- --21- xxi - -22- - -23- xxiii
2016년 신호등 10월호 내지.indd
 www.koroad.or.kr E-book 10 2016. Vol. 434 62 C o n t e n t s 50 58 46 24 04 20 46 06 08, 3 3 10 12,! 16 18 24, 28, 30 34 234 38? 40 2017 LPG 44 Car? 50 KoROAD(1) 2016 54 KoROAD(2), 58, 60, 62 KoROAD 68
www.koroad.or.kr E-book 10 2016. Vol. 434 62 C o n t e n t s 50 58 46 24 04 20 46 06 08, 3 3 10 12,! 16 18 24, 28, 30 34 234 38? 40 2017 LPG 44 Car? 50 KoROAD(1) 2016 54 KoROAD(2), 58, 60, 62 KoROAD 68
장애인건강관리사업
 장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
장애인건강관리사업 2013. 2013 : : ( ) : ( ) ( ) ( ) : ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 1.. 2.. 제1장. 연구개요 1 제2장. 1세부과제 : 장애인건강상태평가와모니터링 10 - i - 제3장. 2세부과제 : 장애인만성질환위험요인조사연구 117 - ii - 4장.
학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental Ta
 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental Ta") www.sen.go.kr 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의 시설 설비및교구기준연구 2012. 10. 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental
www.sen.go.kr 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의 시설 설비및교구기준연구 2012. 10. 학교교과교습학원 ( 예능계열 ) 및평생직업교육학원의시설 설비및교구기준적정성연구 A Study on the Curriculum, Facilities, and Equipment Analysis in Private Academy and It's Developmental
 동북아 문화공동체 형성을 위한 한 중 일 대중문화 교류의 현황 및 증진 방안 연구 동북아 문화공동체 특별연구위원회 구 분 성 명 소 속 및 직 위 위 원 장 김 광 억 서울대 인류학과 교수 김 우 상 연세대 정치외교학과 교수 박 준 식 한림대 사회학과 교수 전 영 평 대구대 도시행정학과 교수 위 원 정 진 곤 한양대 교육학과 교수 정 하 미 한양대 일본언어
동북아 문화공동체 형성을 위한 한 중 일 대중문화 교류의 현황 및 증진 방안 연구 동북아 문화공동체 특별연구위원회 구 분 성 명 소 속 및 직 위 위 원 장 김 광 억 서울대 인류학과 교수 김 우 상 연세대 정치외교학과 교수 박 준 식 한림대 사회학과 교수 전 영 평 대구대 도시행정학과 교수 위 원 정 진 곤 한양대 교육학과 교수 정 하 미 한양대 일본언어
 연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
연구보고서 2009-05 일반화선형모형 (GLM) 을이용한 자동차보험요율상대도산출방법연구 Ⅰ. 요율상대도산출시일반화선형모형활용방법 1. 일반화선형모형 2 연구보고서 2009-05 2. 일반화선형모형의자동차보험요율산출에적용방법 요약 3 4 연구보고서 2009-05 Ⅱ. 일반화선형모형을이용한실증분석 1. 모형적용기준 < > = 요약 5 2. 통계자료및통계모형
 ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
ⅰ ⅱ ⅲ ⅳ ⅴ 1 Ⅰ. 서론 2 Ⅰ. 서론 3 4 1) 공공기관미술품구입실태조사 Ⅰ. 서론 5 2) 새예술정책미술은행 (Art Bank) 제도분석 3) 국내외사례조사를통한쟁점과시사점유추 4) 경기도내공공기관의미술품구입정책수립및활용방안을위 한단기및장기전략수립 6 7 Ⅱ. 경기도지역공공기관의미술품구입실태 및현황 1) 실태조사의목적 ž 2) 표본조사기관의범위
2016년 신호등 3월호 내지A.indd
 www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
www.koroad.or.kr E-book 03 2016. Vol. 427 54 C o n t e n t s 40 50 24 46 04 20 46? 06,! 24 50 3, 08! BMW,? 28 54 12,! KoROAD 2 30 58 16, 34 60 18? 38 62? 40 64 KoROAD (IBA) 4!,, 2016 CEO!. 427 2016 3 2
경상북도와시 군간인사교류활성화방안
 2010-14 경상북도와시 군간인사교류활성화방안 목 차 경상북도와시 군간인사교류활성화방안 요약,,,, 4, 5, 6,,,,, 5 58 1:1 34, 24 ( 13, 11 ) 2010 2017 8 i (5 8 ),.,, 74 (4 3, 5 19, 6 52 ) (4~6 4,901 ) 1.5% 5% ii 제 1 장 연구개요 1 연구배경과목적 2 연구범위와방법
2010-14 경상북도와시 군간인사교류활성화방안 목 차 경상북도와시 군간인사교류활성화방안 요약,,,, 4, 5, 6,,,,, 5 58 1:1 34, 24 ( 13, 11 ) 2010 2017 8 i (5 8 ),.,, 74 (4 3, 5 19, 6 52 ) (4~6 4,901 ) 1.5% 5% ii 제 1 장 연구개요 1 연구배경과목적 2 연구범위와방법
오토 2, 3월호 내지최종
 Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
Industry Insight 인사이드 블루투스 자동차와 블루투스의 공존법칙 운전 중 휴대전화 사용을 금지하는 법률이 세계적으로 확산되고 있으며, 블루투스(Bluetooth) 기반의 핸즈프리 기능을 이용하는 것이 이에 대한 확실한 대안으로 자리잡았다. 그러나 차기 무선 멀티미디어 스트리밍에 관해서는 어떤 일이 일어날 지 아무도 알 수 없다. 글 윤 범 진 기자
2016년 신호등 1월호 내지(1219).indd
.indd") www.koroad.or.kr E-book 01 2016. Vol. 425 06 C o n t e n t s 58 48 18 22 04 CEO 18 2016 48! 06 22 52,, 2 08 26,! 56 KoROAD,! 14 28 58 16 32 60,?! 36, 62?, 38, 64 KoROAD?. (IBA) 4! 425 2016 1 4 1980 8 22.
www.koroad.or.kr E-book 01 2016. Vol. 425 06 C o n t e n t s 58 48 18 22 04 CEO 18 2016 48! 06 22 52,, 2 08 26,! 56 KoROAD,! 14 28 58 16 32 60,?! 36, 62?, 38, 64 KoROAD?. (IBA) 4! 425 2016 1 4 1980 8 22.
ㅇ ㅇ
 ㅇ ㅇ ㅇ 1 ㆍ 2 3 4 ㅇ 1 ㆍ 2 3 ㅇ 1 2 ㆍ ㅇ 1 2 3 ㆍ 4 ㆍ 5 6 ㅇ ㆍ ㆍ 1 2 ㆍ 3 4 5 ㅇ 1 2 3 ㅇ 1 2 3 ㅇ ㅇ ㅇ 붙임 7 대추진전략및 27 개세부추진과제 제 5 차국가공간정보정책기본계획 (2013~2017) 2013. 10 국토교통부 : 2013 2017 차 례 제 1 장창조사회를견인하는국가공간정보정책
ㅇ ㅇ ㅇ 1 ㆍ 2 3 4 ㅇ 1 ㆍ 2 3 ㅇ 1 2 ㆍ ㅇ 1 2 3 ㆍ 4 ㆍ 5 6 ㅇ ㆍ ㆍ 1 2 ㆍ 3 4 5 ㅇ 1 2 3 ㅇ 1 2 3 ㅇ ㅇ ㅇ 붙임 7 대추진전략및 27 개세부추진과제 제 5 차국가공간정보정책기본계획 (2013~2017) 2013. 10 국토교통부 : 2013 2017 차 례 제 1 장창조사회를견인하는국가공간정보정책
[11하예타] 교외선 인쇄본_ver3.hwp
![[11하예타] 교외선 인쇄본_ver3.hwp](/thumbs/81/84006372.jpg "[11하예타] 교외선 인쇄본_ver3.hwp") 2012 년도예비타당성조사보고서 교외선 ( 능곡 ~ 의정부 ) 철도사업 2012. 7. 요약 요약 제 1 장예비타당성조사의개요 1. 사업추진배경 2000 5 16, 2004 4 1,, 2006 -,, 39,., ~~, 2. 사업의추진경위및추진주체 2004. 12: (~) () - 21 (B/C=0.34). 2010. 04~2012. 02: (~) () - (B/C=0.53,
2012 년도예비타당성조사보고서 교외선 ( 능곡 ~ 의정부 ) 철도사업 2012. 7. 요약 요약 제 1 장예비타당성조사의개요 1. 사업추진배경 2000 5 16, 2004 4 1,, 2006 -,, 39,., ~~, 2. 사업의추진경위및추진주체 2004. 12: (~) () - 21 (B/C=0.34). 2010. 04~2012. 02: (~) () - (B/C=0.53,
???德嶠짚
 2018 3+4 NO.132 SDGs Social Equality Communication Human Rights Justice Peace www.kipa.re.kr CONTENTS 2018 3+4 NO.132 02 52 16 22 58 32 38 44 66 www.kipa.re.kr 74 80 132 2018 4 13 235 02-2007-0644 02-564-2006
2018 3+4 NO.132 SDGs Social Equality Communication Human Rights Justice Peace www.kipa.re.kr CONTENTS 2018 3+4 NO.132 02 52 16 22 58 32 38 44 66 www.kipa.re.kr 74 80 132 2018 4 13 235 02-2007-0644 02-564-2006
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
선진사례집(0529)
") Contents Contents 1 8 9 10 2 11 선진사례집(0529) 2012.5.29 13:30 페이지12 MAC-3 추진내용 GPS로부터 자동차의 주행 스피드를 계산하여 교통 정보 수집 일본 노무라연구소는 스마트폰형 내비게이션 서비스인 전력안내!내비 를 활용하여 2011년 일본 대지진시 도로교통 체증 피해 최소화 - 교통 체증 감소 효과 및
Contents Contents 1 8 9 10 2 11 선진사례집(0529) 2012.5.29 13:30 페이지12 MAC-3 추진내용 GPS로부터 자동차의 주행 스피드를 계산하여 교통 정보 수집 일본 노무라연구소는 스마트폰형 내비게이션 서비스인 전력안내!내비 를 활용하여 2011년 일본 대지진시 도로교통 체증 피해 최소화 - 교통 체증 감소 효과 및
13Åë°è¹é¼Ł
 이면은빈공간입니다. National Statistics White Paper 2012 National Statistics White Paper ii _ STATISTICS KOREA 2012 _ iii 2012 National Statistics White Paper 1 26 2 27 3 28 4 29 5 30 6 31 7 32 8 33 9 34 10 35
이면은빈공간입니다. National Statistics White Paper 2012 National Statistics White Paper ii _ STATISTICS KOREA 2012 _ iii 2012 National Statistics White Paper 1 26 2 27 3 28 4 29 5 30 6 31 7 32 8 33 9 34 10 35
 ... 수시연구 2011-16.. 평창동계올림픽수송체계구축을위한 핵심쟁점및대응방안 Transport Countermeasure Strategies for the PyeongChang Winter Olympic Games... 문영준외 5 인... 서문 원장 김경철 목차 표목차 그림목차 xi 요약 xii xiii xiv xv xvi xvii xviii
... 수시연구 2011-16.. 평창동계올림픽수송체계구축을위한 핵심쟁점및대응방안 Transport Countermeasure Strategies for the PyeongChang Winter Olympic Games... 문영준외 5 인... 서문 원장 김경철 목차 표목차 그림목차 xi 요약 xii xiii xiv xv xvi xvii xviii
2013_1_14_GM작물실용화사업단_소식지_내지_인쇄_앙코르130.indd
 GM작물실용화사업단 인식조사 및 실용화 방향 설정 GM작물 인식조사 및 실용화 방향 설정 한국사회과학데이터센터 김욱 박사 1. 조사목적 GM 작물 관련 인식조사는 사회과학자들을 바탕으로 하여 국내 다양한 이해관계자들의 GM 작물 관련 인식 추이를 지속적이고, 체계적으로 모니터링하여 인식이 어떻게 변화하고 있는가를 탐구하기 위한 것입니다. 2. 조사설계 2.1.
GM작물실용화사업단 인식조사 및 실용화 방향 설정 GM작물 인식조사 및 실용화 방향 설정 한국사회과학데이터센터 김욱 박사 1. 조사목적 GM 작물 관련 인식조사는 사회과학자들을 바탕으로 하여 국내 다양한 이해관계자들의 GM 작물 관련 인식 추이를 지속적이고, 체계적으로 모니터링하여 인식이 어떻게 변화하고 있는가를 탐구하기 위한 것입니다. 2. 조사설계 2.1.
(012~031)223교과(교)2-1
223교과(교)2-1") 0 184 9. 03 185 1 2 oneclick.law.go.kr 186 9. (172~191)223교과(교)2-9 2017.1.17 5:59 PM 페이지187 mac02 T tip_ 헌법 재판소의 기능 위헌 법률 심판: 법률이 헌법에 위반되면 그 효력을 잃게 하거 나 적용하지 못하게 하는 것 탄핵 심판: 고위 공무원이나 특수한 직위에 있는 공무원이 맡
0 184 9. 03 185 1 2 oneclick.law.go.kr 186 9. (172~191)223교과(교)2-9 2017.1.17 5:59 PM 페이지187 mac02 T tip_ 헌법 재판소의 기능 위헌 법률 심판: 법률이 헌법에 위반되면 그 효력을 잃게 하거 나 적용하지 못하게 하는 것 탄핵 심판: 고위 공무원이나 특수한 직위에 있는 공무원이 맡
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 한국직업자격학회
 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구 2015. 12 한국직업자격학회 o o o o o 1) SC 내에서 Sub-SC 가존재하는것이아니라 NOS, 자격개발등의개발및운영단위가 Sub-sector 로구분되어있음을의미함. o o o o o o o o o Ⅰ. 서론 1 1. 연구필요성 o o 산업별인적자원개발위원회역할및기능강화를위한중장기발전방안연구
iOS ÇÁ·Î±×·¡¹Ö 1205.PDF
 iphone ios 5 DEVELOPMENT ESSENTIALS Copyright 2011 Korean Translation Copyright 2011 by J-Pub. co. The Korean edition is published by arrangement with Neil Smyth through Agency-One, Seoul. i iphone ios
iphone ios 5 DEVELOPMENT ESSENTIALS Copyright 2011 Korean Translation Copyright 2011 by J-Pub. co. The Korean edition is published by arrangement with Neil Smyth through Agency-One, Seoul. i iphone ios
PERFORMANCE technology the all-new bmw 5 series. dynamic 06 business 14 comfort 20 safety 22 model LineuP 24 TecHnicaL data 26 bmw service 28 bmw kore
 sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
sheer Driving Pleasure sheer Driving Pleasure the all-new bmw 5 series. bmw080269-2200bmw www.bmw.co.krbmwwww.facebook.com/bmwkorea bmw www.instagram.com/bmw_korea bmw www.youtube.com/bmwkorea 080269-33001677-77
<C0CCBCF8BFE42DB1B3C1A4BFCFB7E12DB1E8B9CCBCB12DC0DBBCBAC0DAB0CBC1F5BFCFB7E12DB8D3B8AEB8BBB3BBBACEC0DAB0CBC1F52E687770>
 사회복지용 지능로봇 기술동향 머 리 말 목 차 제1장 서 론 1 제2장 기술의 특징 3 제3장 사회복지용 지능 로봇산업의 기술 수요 전망 11 제4장 사회복지용 지능 로봇의 기술 동향 32 제5장 결론 및 정책 제언 103 참고문헌 109 표 목차 그림 목차 제1장 서 론 1. 목적 및 필요성 2. 분석내용 및 범위 제2장 기술의 특징 1. 지능형 로봇기술의
사회복지용 지능로봇 기술동향 머 리 말 목 차 제1장 서 론 1 제2장 기술의 특징 3 제3장 사회복지용 지능 로봇산업의 기술 수요 전망 11 제4장 사회복지용 지능 로봇의 기술 동향 32 제5장 결론 및 정책 제언 103 참고문헌 109 표 목차 그림 목차 제1장 서 론 1. 목적 및 필요성 2. 분석내용 및 범위 제2장 기술의 특징 1. 지능형 로봇기술의
제 2 편채권총론 제1장채권의목적 제2장채권의효력 제3장채권의양도와채무인수 제4장채권의소멸 제5장수인의채권자및채무자
 제 2 편채권총론 제1장채권의목적 제2장채권의효력 제3장채권의양도와채무인수 제4장채권의소멸 제5장수인의채권자및채무자 문 1] 채권의목적에관한다음설명중가장옳지않은것은? - 1 - 정답 : 5 문 2] 이행지체에관한다음의설명중가장옳지않은것은? - 2 - 정답 : 4 문 3] 채무불이행으로인한손해배상청구에관한다음설명중옳은것을모두고른것은?
제 2 편채권총론 제1장채권의목적 제2장채권의효력 제3장채권의양도와채무인수 제4장채권의소멸 제5장수인의채권자및채무자 문 1] 채권의목적에관한다음설명중가장옳지않은것은? - 1 - 정답 : 5 문 2] 이행지체에관한다음의설명중가장옳지않은것은? - 2 - 정답 : 4 문 3] 채무불이행으로인한손해배상청구에관한다음설명중옳은것을모두고른것은?
지도임자_1204_출판(최종).hwp
.hwp") 2012 년도수요예측재조사보고서 국도 24 호선 ( 지도 ~ 임자 ) 건설사업 2012. 12 요 약 Ⅰ. 수요예측재조사의개요 1. 사업의개요 24(~) 4.99km 2 1975, 2006,, : L=4.99km(B=11.0m, V=60km/h) 3 1,955m( 2 1,920m), 3 : 182,151 ( 100%) : ~ : 2012 2019 (8) :
2012 년도수요예측재조사보고서 국도 24 호선 ( 지도 ~ 임자 ) 건설사업 2012. 12 요 약 Ⅰ. 수요예측재조사의개요 1. 사업의개요 24(~) 4.99km 2 1975, 2006,, : L=4.99km(B=11.0m, V=60km/h) 3 1,955m( 2 1,920m), 3 : 182,151 ( 100%) : ~ : 2012 2019 (8) :
☆5.명묘희(2차수정)경찰학연구제33호.hwp
경찰학연구제33호.hwp") 교통수단의구분및관리에대한도로교통관계법령개정방안연구 The Revision of Road Traffic Act of Classification and Management of Diverse Transport Modes 명묘희 * Ⅰ. 서론 1) Ⅱ. 선행연구및정책동향 Ⅲ. 교통수단구분및관리에관한입법현황 Ⅳ. 국제협약및외국사례에대한비교법적고찰 Ⅴ. 교통수단관리의문제점분석및정책제언
교통수단의구분및관리에대한도로교통관계법령개정방안연구 The Revision of Road Traffic Act of Classification and Management of Diverse Transport Modes 명묘희 * Ⅰ. 서론 1) Ⅱ. 선행연구및정책동향 Ⅲ. 교통수단구분및관리에관한입법현황 Ⅳ. 국제협약및외국사례에대한비교법적고찰 Ⅴ. 교통수단관리의문제점분석및정책제언
< C617720BBF3B4E3BBE7B7CAC1FD20C1A632B1C72E687770>
 IT&Law 상담사례집 - 제 2 권 - IT&Law 상담사례집제2권 - 1 - 제 1 장프로그램저작권일반 - 2 - IT&Law 상담사례집제2권 - 3 - 제 1 장프로그램저작권일반 - 4 - IT&Law 상담사례집제2권 - 5 - 제 1 장프로그램저작권일반 - 6 - IT&Law 상담사례집제2권 - 7 - 제 1 장프로그램저작권일반 - 8 -
IT&Law 상담사례집 - 제 2 권 - IT&Law 상담사례집제2권 - 1 - 제 1 장프로그램저작권일반 - 2 - IT&Law 상담사례집제2권 - 3 - 제 1 장프로그램저작권일반 - 4 - IT&Law 상담사례집제2권 - 5 - 제 1 장프로그램저작권일반 - 6 - IT&Law 상담사례집제2권 - 7 - 제 1 장프로그램저작권일반 - 8 -
보험판매와 고객보호의 원칙
 ..... 61),,,, IT,.,. 2020-2040. IT...... 1 10.. (No Fault). (No Fault). (No Fault). * /. (2016.12.08), (2016.12.24), (2016.12.26) - 243 - 10 2 (2016).... 1),,.,,,.,. 2) (National Highway Traffic Safety
..... 61),,,, IT,.,. 2020-2040. IT...... 1 10.. (No Fault). (No Fault). (No Fault). * /. (2016.12.08), (2016.12.24), (2016.12.26) - 243 - 10 2 (2016).... 1),,.,,,.,. 2) (National Highway Traffic Safety
ICT À¶ÇÕÃÖÁ¾
 Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
Ver. 2012 T TA-11104-SA 4 21 21 42 65 91 103 124 140 161 187 Ver. 2012 ICT Standardization Strategy Map 4 Ver. 2012 Ver. 2012 5 ICT Standardization Strategy Map 6 Ver. 2012 Ver. 2012 7 ICT Standardization
CR2006-41.hwp
 연구책임자 가나다 순 머 리 말 2006년 12월 한국교육학술정보원 원장 - i - - ii - - iii - 평가 영역 1. 교육계획 2. 수업 3. 인적자원 4. 물적자원 5. 경영과 행정 6. 교육성과 평가 부문 부문 배점 비율(%) 점수(점) 영역 배점 1.1 교육목표 3 15 45점 1.2 교육과정 6 30 (9%) 2.1 수업설계 6 30 2.2
연구책임자 가나다 순 머 리 말 2006년 12월 한국교육학술정보원 원장 - i - - ii - - iii - 평가 영역 1. 교육계획 2. 수업 3. 인적자원 4. 물적자원 5. 경영과 행정 6. 교육성과 평가 부문 부문 배점 비율(%) 점수(점) 영역 배점 1.1 교육목표 3 15 45점 1.2 교육과정 6 30 (9%) 2.1 수업설계 6 30 2.2
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (
 02. 공산품및소비제품 생활용품검사검사종류검사품목검사방법 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 호 (") 제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
제 KI011호사업장 : 서울특별시구로구디지털로26길 87 ( 구로동 ) 02. 공산품및소비제품 02.003 생활용품검사 안전확인대상생활용품 생활 휴대용레이저용품 안전확인대상생활용품의안전기준부속서 46 ( 국가기술표준원고시제 2017-032 호 (2017.2.8.)) 03. 재료및부품 03.001 자동차부품검사 기능안전심사 ISO 26262-2 : 2011
<BEC6BFF4BCD2BDCCBAB8B0EDBCAD28C3D6C1BE29303831302E687770>
 동아시아역내 일본자동차산업의 아웃소싱 시장 분석을 통한 국내자동차부품기업의 진출방안 연구 2008. 8. 29. 한일산업기술협력재단 연구 참여자 책임연구자: 김도훈(한일산업기술협력재단 일본기업연구센터 연구위원) 연 구 자: 오재훤(메이지대학 국제일본학부 준교수) 연 구 자: 김봉길(도야마대학 경제학부 교수) 연 구 자: 정성춘(대외경제정책연구원 일본팀장) 연
동아시아역내 일본자동차산업의 아웃소싱 시장 분석을 통한 국내자동차부품기업의 진출방안 연구 2008. 8. 29. 한일산업기술협력재단 연구 참여자 책임연구자: 김도훈(한일산업기술협력재단 일본기업연구센터 연구위원) 연 구 자: 오재훤(메이지대학 국제일본학부 준교수) 연 구 자: 김봉길(도야마대학 경제학부 교수) 연 구 자: 정성춘(대외경제정책연구원 일본팀장) 연
[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp
![[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp](/thumbs/91/104626366.jpg "[10상예타]_광주도시철도2호선 건설사업_인쇄본_ hwp") 2010 년도예비타당성조사보고서 광주도시철도 2 호선건설사업 공공투자관리센터 한국개발연구원 요 약 요약 Ⅰ. 예비타당성조사의개요 1. 사업의배경및목적,,. 2 2002 2005, 2010. 2015 2. 1 1 2015 2 2. 사업추진경위 2002, 2005 (B/C=1.42, AHP=0.606), ( )., 5, 2 ( () ). - (2010.2).
2010 년도예비타당성조사보고서 광주도시철도 2 호선건설사업 공공투자관리센터 한국개발연구원 요 약 요약 Ⅰ. 예비타당성조사의개요 1. 사업의배경및목적,,. 2 2002 2005, 2010. 2015 2. 1 1 2015 2 2. 사업추진경위 2002, 2005 (B/C=1.42, AHP=0.606), ( )., 5, 2 ( () ). - (2010.2).
- 2 -
 - 1 - - 2 - - - - 4 - - 5 - - 6 - - 7 - - 8 - 4) 민원담당공무원 대상 설문조사의 결과와 함의 국민신문고가 업무와 통합된 지식경영시스템으로 실제 운영되고 있는지, 국민신문 고의 효율 알 성 제고 등 성과향상에 기여한다고 평가할 수 있는지를 치 메 국민신문고를 접해본 중앙부처 및 지방자 였 조사를 시행하 였 해 진행하 월 다.
- 1 - - 2 - - - - 4 - - 5 - - 6 - - 7 - - 8 - 4) 민원담당공무원 대상 설문조사의 결과와 함의 국민신문고가 업무와 통합된 지식경영시스템으로 실제 운영되고 있는지, 국민신문 고의 효율 알 성 제고 등 성과향상에 기여한다고 평가할 수 있는지를 치 메 국민신문고를 접해본 중앙부처 및 지방자 였 조사를 시행하 였 해 진행하 월 다.
¿©¼ººÎÃÖÁ¾¼öÁ¤(0108).hwp
.hwp") 어렵다. 1997년우리나라 50대그룹 (586개기업 ) 에근무하는 110,096 명의과장급이상관리 - 1 - - 2 - - 3 - 행정및경영관리자 (02) 중에서경영관리자에해당되는부문이라고할수있다. 경영관리자는더세부적으로는기업고위임원 (021), 생산부서관리자 (022), 기타부서관리자 (023) 등으로세분류할수있다 (< 참고-1> 참조 ). 임원-부장-과장
어렵다. 1997년우리나라 50대그룹 (586개기업 ) 에근무하는 110,096 명의과장급이상관리 - 1 - - 2 - - 3 - 행정및경영관리자 (02) 중에서경영관리자에해당되는부문이라고할수있다. 경영관리자는더세부적으로는기업고위임원 (021), 생산부서관리자 (022), 기타부서관리자 (023) 등으로세분류할수있다 (< 참고-1> 참조 ). 임원-부장-과장
어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구
홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구") 2015-0213-025 2015년판 교통사고통계 요약 어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구축 관리 분석)하여 교통안전정책 수립
2015-0213-025 2015년판 교통사고통계 요약 어디서 찾지? TAAS(교통사고분석시스템)홈페이지를 클릭하면 교통사고통계가 한눈에 http://taas.koroad.or.kr TAAS란? 도로교통공단은 교통안전법 제59조, 동법 시행령 제48조 제3항 에 따라 경찰 보험사 공제 조합 등의 교통사고 통계자료를 통합(구축 관리 분석)하여 교통안전정책 수립
슬라이드 1
 공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
공학컴퓨터활용입문 메카트로닉스시스템 메카트로닉스시스템정의 메카트로닉스시스템예 메카트로닉스시스템이란? 메카트로닉스정의 메카트로닉스란용어는메카틱스 ( 기계역학 ) 와일렉트로닉스 ( 전자 ) 의합성어로서 1960 년대말경일본 (Yaskawa Electoric Co.) 에서만들어져 1980 년전후로정착된신조어이며현재는일반적인용어임. 따라서, 메카트로닉스란기계기술과전자제어및정보처리기술을응용하여,
제 2 차 (2013~2015) 어린이식생활안전관리종합계획
 어린이식생활안전관리종합계획") 제 2 차 (2013~2015) 어린이식생활안전관리종합계획 2012. 9 목 차 추진배경 1 주요성과와반성 3 정책과여건 11 추진체계 16 세부추진과제 21 1. 어린이기호식품안전판매환경조성 23 1-1. 어린이식품안전보호구역지정및관리강화 26 1-2. 어린이기호식품판매환경개선 30 2. 어린이식생활안심확보를위한안전공급체계구축 39 2-1. 어린이단체급식의안전관리및품질개선
제 2 차 (2013~2015) 어린이식생활안전관리종합계획 2012. 9 목 차 추진배경 1 주요성과와반성 3 정책과여건 11 추진체계 16 세부추진과제 21 1. 어린이기호식품안전판매환경조성 23 1-1. 어린이식품안전보호구역지정및관리강화 26 1-2. 어린이기호식품판매환경개선 30 2. 어린이식생활안심확보를위한안전공급체계구축 39 2-1. 어린이단체급식의안전관리및품질개선
5월전체 :7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26
 5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
5월전체 2005.6.9 5:7 PM 페이지14 NO.3 Acrobat PDFWriter 제 40회 발명의날 기념식 격려사 존경하는 발명인 여러분! 연구개발의 효율성을 높이고 중복투자도 방지할 것입니다. 우리는 지금 거센 도전에 직면해 있습니다. 뿐만 아니라 전국 26개 지역지식재산센터 를 통해 발명가와 중소기업들에게 기술개발에서 선진국은 첨단기술을 바탕으로
성인지통계
 2015 광주 성인지 통계 브리프 - 안전 및 환경 Safety and Environment - 광주여성 사회안전에 대한 불안감 2012년 46.8% 2014년 59.1% 전반적 사회안전도 는 여성과 남성 모두 전국 최하위 사회안전에 대한 인식 - 2014년 광주여성의 사회안전에 대한 인식을 살펴보면, 범죄위험 으로부터 불안하 다고 인식하는 비율이 76.2%로
2015 광주 성인지 통계 브리프 - 안전 및 환경 Safety and Environment - 광주여성 사회안전에 대한 불안감 2012년 46.8% 2014년 59.1% 전반적 사회안전도 는 여성과 남성 모두 전국 최하위 사회안전에 대한 인식 - 2014년 광주여성의 사회안전에 대한 인식을 살펴보면, 범죄위험 으로부터 불안하 다고 인식하는 비율이 76.2%로
untitled
 ISBN 89-90077-98-2 93300 2005 UNDP 워크샵 한국과 동남아시아의 성 인지적 문화정책을 찾아서 주 관: 한국문화관광정책연구원 한국동남아연구소 후 원: 문화관광부 과학기술부 UNDP 2005 UNDP 워크샵 : 한국과 동남아시아의 성 인지적 문화정책을 찾아서 연구진 연구책임자: 류정아 (한국문화관광정책연구원 문화정책팀장) 공동연구자: 김민정
ISBN 89-90077-98-2 93300 2005 UNDP 워크샵 한국과 동남아시아의 성 인지적 문화정책을 찾아서 주 관: 한국문화관광정책연구원 한국동남아연구소 후 원: 문화관광부 과학기술부 UNDP 2005 UNDP 워크샵 : 한국과 동남아시아의 성 인지적 문화정책을 찾아서 연구진 연구책임자: 류정아 (한국문화관광정책연구원 문화정책팀장) 공동연구자: 김민정
경북자동차부품관련연구소의효율적 운영방안
 2009-046 경북자동차부품관련연구소의효율적 운영방안 차례 표차례 그림차례 요약 1. 연구배경및목적,,, IT. 3,.,.. 2. 국내 지역자동차산업현황 2007 20.3 GDP 2.5%. 9%, 12%, 13%, 07 409, 285 5, 147 2.9. 8.6%, 7.0%, 4.5%, i . ( ) ( ) ( ) 4,577 277,319 38,865,170
2009-046 경북자동차부품관련연구소의효율적 운영방안 차례 표차례 그림차례 요약 1. 연구배경및목적,,, IT. 3,.,.. 2. 국내 지역자동차산업현황 2007 20.3 GDP 2.5%. 9%, 12%, 13%, 07 409, 285 5, 147 2.9. 8.6%, 7.0%, 4.5%, i . ( ) ( ) ( ) 4,577 277,319 38,865,170
<BBE7C8B8C0FBC0C7BBE7BCD2C5EBBFACB1B820C3D6C1BEBAB8B0EDBCAD2E687770>
 국립국어원 2007-01-42 사회적의사소통연구 : 성차별적언어표현사례조사및대안마련을위한연구 국립국어원 한국여성정책연구원 제출문 국립국어원장귀하 국립국어원의국고보조금지원으로수행한 사회적의사 소통연구 : 성차별적언어표현사례조사및대안마련을위한 연구 의결과보고서를작성하여제출합니다. 한국여성정책연구원 안상수 백영주, 양애경, 강혜란, 윤정주 목 차 연구개요 선행연구의고찰
국립국어원 2007-01-42 사회적의사소통연구 : 성차별적언어표현사례조사및대안마련을위한연구 국립국어원 한국여성정책연구원 제출문 국립국어원장귀하 국립국어원의국고보조금지원으로수행한 사회적의사 소통연구 : 성차별적언어표현사례조사및대안마련을위한 연구 의결과보고서를작성하여제출합니다. 한국여성정책연구원 안상수 백영주, 양애경, 강혜란, 윤정주 목 차 연구개요 선행연구의고찰
특집1 국내 자전거 교통사고 현황과 특징 망자가 차지하는 비중은 오히려 증가(4.9% 5.5%)하 여 사고의 심각성은 더욱 커졌다고 할 수 있다. 나아가 2%대인 자전거 수단분담률에 비해 전체 교통사고 중 자전거사고가 약 5%를 차지하고 있다는 점은 향후 자 전거 안전
하 여 사고의 심각성은 더욱 커졌다고 할 수 있다. 나아가 2%대인 자전거 수단분담률에 비해 전체 교통사고 중 자전거사고가 약 5%를 차지하고 있다는 점은 향후 자 전거 안전") 자전거 교통안전의 현주소와 개선 방향 국내 자전거 교통사고 현황과 특징 Theme 01 국내 자전거교통 인프라 및 시설 확충은 2010년 이후 지속적으로 성장하고 있으나, 자전거의 사고 및 위험성도 증대 되고 있는 실정이다. 따라서 앞으로는 자전거 이용자의 안전 증진 및 사고 예방을 위한 제도 개선과 정책 시행이 필요 하다. 이 글에서는 최근 국내 자전거 교통
자전거 교통안전의 현주소와 개선 방향 국내 자전거 교통사고 현황과 특징 Theme 01 국내 자전거교통 인프라 및 시설 확충은 2010년 이후 지속적으로 성장하고 있으나, 자전거의 사고 및 위험성도 증대 되고 있는 실정이다. 따라서 앞으로는 자전거 이용자의 안전 증진 및 사고 예방을 위한 제도 개선과 정책 시행이 필요 하다. 이 글에서는 최근 국내 자전거 교통
교육학석사학위논문 윤리적입장에따른학교상담자의 비밀보장예외판단차이분석 년 월 서울대학교대학원 교육학과교육상담전공 구승영
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
기본소득문답2
 응답하라! 기본소득 응답하라! 기본소득 06 Q.01 07 Q.02 08 Q.03 09 Q.04 10 Q.05 11 Q.06 12 Q.07 13 Q.08 14 Q.09 응답하라! 기본소득 contents 16 Q.10 18 Q.11 19 Q.12 20 Q.13 22 Q.14 23 Q.15 24 Q.16 Q.01 기본소득의 개념을 쉽게 설명해주세요. 06 응답하라
응답하라! 기본소득 응답하라! 기본소득 06 Q.01 07 Q.02 08 Q.03 09 Q.04 10 Q.05 11 Q.06 12 Q.07 13 Q.08 14 Q.09 응답하라! 기본소득 contents 16 Q.10 18 Q.11 19 Q.12 20 Q.13 22 Q.14 23 Q.15 24 Q.16 Q.01 기본소득의 개념을 쉽게 설명해주세요. 06 응답하라
슬라이드 1
 IT R&D Global Leader 자율협력주행을위한 V2X 통신기술 Krnet2017 미래자율주행자동차세션 2 목차 1 협력주행기술개념 2 협력주행서비스 3 V2X 통신기술표준 4 V2X 통신기술개발 3 1 협력주행기술개념 4 협력주행기술개념 자율주행기술 : 센서를이용한자율주행 협력자율주행기술 : 통신인프라와연계한자율주행 Google s Autonomous
IT R&D Global Leader 자율협력주행을위한 V2X 통신기술 Krnet2017 미래자율주행자동차세션 2 목차 1 협력주행기술개념 2 협력주행서비스 3 V2X 통신기술표준 4 V2X 통신기술개발 3 1 협력주행기술개념 4 협력주행기술개념 자율주행기술 : 센서를이용한자율주행 협력자율주행기술 : 통신인프라와연계한자율주행 Google s Autonomous
목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 목재제품의종류 국내목재산업현황 목재산업트렌드분석및미래시
 목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
목재미래기업발굴및육성을위한 중장기사업방향제안 2017. 11. 목 차 Ⅰ. 사업개요 5 1. 사업배경및목적 5 2. 사업내용 8 Ⅱ. 국내목재산업트렌드분석및미래시장예측 9 1. 국내외산업동향 9 2. 국내목재산업트렌드분석및미래시장예측 16 2.1. 목재제품의종류 16 2.2. 국내목재산업현황 19 2.3. 목재산업트렌드분석및미래시장예측 33 Ⅲ. 목재미래기업의정의및분류
신규투자사업에 대한 타당성조사(최종보고서)_v10_클린아이공시.hwp
_v10_클린아이공시.hwp") 신규투자사업에 대한 타당성 조사 (요약본) 2015. 4. 지방공기업평가원 제주관광공사가부족한쇼핑인프라를보완하고, 수익을제주관광진흥에재투자하여 관광산업활성화와관광마케팅재원확보 라는양대목적달성에기여하고공기업으로서사회적책임을다하고자시내면세점사업에투자하려는의사결정에대한타당도는전반적으로볼때 긍정 으로평가할수있음 역할및필요성 대내 외환경 정책및법률 경제성기대효과
신규투자사업에 대한 타당성 조사 (요약본) 2015. 4. 지방공기업평가원 제주관광공사가부족한쇼핑인프라를보완하고, 수익을제주관광진흥에재투자하여 관광산업활성화와관광마케팅재원확보 라는양대목적달성에기여하고공기업으로서사회적책임을다하고자시내면세점사업에투자하려는의사결정에대한타당도는전반적으로볼때 긍정 으로평가할수있음 역할및필요성 대내 외환경 정책및법률 경제성기대효과
목차 Ⅰ. 기본현황 Ⅱ 년도성과평가및시사점 Ⅲ 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬
 증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
증평군청 / 3185-00-201004 / WORKGROUP / Page 1 목차 Ⅰ. 기본현황 Ⅱ. 2012 년도성과평가및시사점 Ⅲ. 2013 년도비전및전략목표 Ⅳ. 전략목표별핵심과제 1. 군정성과확산을통한지역경쟁력강화 2. 지역교육환경개선및평생학습활성화 3. 건전재정및합리적예산운용 4. 청렴한공직문화및앞서가는법무행정구현 5. 참여소통을통한섬기는군정구현 Ⅴ.
ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9
![ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9](/thumbs/40/22040462.jpg "ICT EXPERT INTERVIEW ITS/ ICT? 차량과 인프라 간 통신(V2I) Nomadic 단말 통신(V2P) 차량 간 통신(V2V) IVN IVN [ 1] ITS/ ICT TTA Journal Vol.160 l 9") 오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
오늘날 자동차와 도로는 ICT 기술과 융합되어 눈부시게 발전하고 있습니다. 자동차는 ICT 기술과 접목되어 스마트 자동차로 변화하며 안전하고 편리하며 CO 2 방출을 줄이는 방향으로 기술개발을 추진하고 있으며 2020년경에는 자율 주행 서비스가 도입될 것으로 전망하고 있습니다. 또한, 도로도 ICT 기술과 접목되어 스마트 도로로 변화하며 안전하고 편리하며 연료
( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 국제개발협력평가소위원회
 '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 국제개발협력평가소위원회") ( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 2016. 2. 16. 국제개발협력평가소위원회 제 20 차 국제개발협력 평가소위원회 회의자료 2 0 1 6 ᆞ 2 ᆞ 16 국제개발협력 평가소위원회
( 제 20-1 호 ) '15 ( 제 20-2 호 ) ''16 '15 년국제개발협력자체평가결과 ( 안 ) 16 년국제개발협력통합평가계획 ( 안 ) 자체평가결과반영계획이행점검결과 ( 제 20-3 호 ) 자체평가결과 2016. 2. 16. 국제개발협력평가소위원회 제 20 차 국제개발협력 평가소위원회 회의자료 2 0 1 6 ᆞ 2 ᆞ 16 국제개발협력 평가소위원회
Ⅰ Ⅱ Ⅲ Ⅳ
 제 2 차유비쿼터스도시종합계획 국토교통부 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ - 4 - 1 배경및법적근거 2 계획의수립방향 - 3 - 3 계획수립의성격및역할 4 계획수립경위 - 4 - Ⅱ 1 국내외여건변화 가. 현황 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - 나. 문제점및기본방향 - 14 - 2 국내 U-City 현황 가. 현황 -
제 2 차유비쿼터스도시종합계획 국토교통부 Ⅰ Ⅱ Ⅲ Ⅳ Ⅴ - 4 - 1 배경및법적근거 2 계획의수립방향 - 3 - 3 계획수립의성격및역할 4 계획수립경위 - 4 - Ⅱ 1 국내외여건변화 가. 현황 - 7 - - 8 - - 9 - - 10 - - 11 - - 12 - - 13 - 나. 문제점및기본방향 - 14 - 2 국내 U-City 현황 가. 현황 -
 ... 연구총서 2010-17.. 도로사업의계획기준합리화방안연구 Improving Highway Type Decision Methods in a Highway Planning Process... 이동민ㆍ조한선외... 서문 원장 황기연 목차 표목차 그림목차 xiii 요약 xiv xv xvi xvii xviii xix xx xxi xxii 요약 xxiii
... 연구총서 2010-17.. 도로사업의계획기준합리화방안연구 Improving Highway Type Decision Methods in a Highway Planning Process... 이동민ㆍ조한선외... 서문 원장 황기연 목차 표목차 그림목차 xiii 요약 xiv xv xvi xvii xviii xix xx xxi xxii 요약 xxiii
2008 다문화가족의중장기전망및대책연구 : 다문화가족의장래인구추계및사회ㆍ경제적효과분석을중심으로 ㆍ ㆍ 2009
 2008 다문화가족의중장기전망및대책연구 : 다문화가족의장래인구추계및사회ㆍ경제적효과분석을중심으로 ㆍ ㆍ 2009 . 다문화가족의중장기전망및대책연구 : 다문화가족의장래인구추계및사회ㆍ경제적효과분석을중심으로 ㆍ ㆍ 2009 10 A Study of the Medium- to Long-term Prospects and Measures of Multicultural Family
2008 다문화가족의중장기전망및대책연구 : 다문화가족의장래인구추계및사회ㆍ경제적효과분석을중심으로 ㆍ ㆍ 2009 . 다문화가족의중장기전망및대책연구 : 다문화가족의장래인구추계및사회ㆍ경제적효과분석을중심으로 ㆍ ㆍ 2009 10 A Study of the Medium- to Long-term Prospects and Measures of Multicultural Family
자율주행자동차기술및시장동향 자율주행자동차요소기술 크게네가지영역즉 인지기술 판단기술 차량이동제어기술 기술로구분 인지기술에는레이더 주변인지기술 카메라 지구항법위성시스템등이속함 판단기술에는결정론적 확률론적방법과학습 비학습기반알고리즘과같은 인공지능기술이해당 제어기술에는엑츄에이
 3 117 자율주행자동차국내외입법비교분석과정책대안 자율주행자동차의운행과책임 신기술과제도화의역할 다양한정보통신기술의기존산업적용을위하여 기존의정태적법제도에대한유연성 이요구 산업 기술분야의법제도는기술혁신의엑셀레이터기능을함 자율주행 자동차관련분야역시신기술개발 특히정보통신분야기술 로인한기존 법제도의변화를요구 자율주행자동차분야역시신기술의적용으로기존자동차산업과관련된 기존내용의변화를요구
3 117 자율주행자동차국내외입법비교분석과정책대안 자율주행자동차의운행과책임 신기술과제도화의역할 다양한정보통신기술의기존산업적용을위하여 기존의정태적법제도에대한유연성 이요구 산업 기술분야의법제도는기술혁신의엑셀레이터기능을함 자율주행 자동차관련분야역시신기술개발 특히정보통신분야기술 로인한기존 법제도의변화를요구 자율주행자동차분야역시신기술의적용으로기존자동차산업과관련된 기존내용의변화를요구
untitled
 국문요약....,,... 2,,. 3.,. 4. 5. Abstract Demographic change is greatly accelerating owing to the increasingly low birth rate and aging population in Korea. In particular, the increase in the number of elderly
국문요약....,,... 2,,. 3.,. 4. 5. Abstract Demographic change is greatly accelerating owing to the increasingly low birth rate and aging population in Korea. In particular, the increase in the number of elderly
2003report250-12.hwp
 지상파 방송의 여성인력 현황 및 전문화 방안 연구 한국여성개발원 발간사 Ⅰ....,.,....... .. Ⅱ. :...... Ⅲ.,,. ..,.,.... 9 1 1.. /.,. PD,,,,, / 7.93%. 1%... 5.28% 10.08%. 3.79%(KBS MBC), 2.38 %(KBS MBC) 1%...,. 10. 15. ( ) ( ), ( ) ( )..
지상파 방송의 여성인력 현황 및 전문화 방안 연구 한국여성개발원 발간사 Ⅰ....,.,....... .. Ⅱ. :...... Ⅲ.,,. ..,.,.... 9 1 1.. /.,. PD,,,,, / 7.93%. 1%... 5.28% 10.08%. 3.79%(KBS MBC), 2.38 %(KBS MBC) 1%...,. 10. 15. ( ) ( ), ( ) ( )..
<BBEAC0E7BAB8C7E8C1A6B5B52E687770>
 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅰ ⅱ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅲ ⅳ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 요약 ⅴ ⅵ 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 1 2 산재보험제도발전방안에대한연구 ( 재활 복지 ) 제 1 장서론 3 4 산재보험제도발전방안에대한연구
자산관리서비스선진화방안(인쇄).hwp
.hwp") 경영보고서 2009-2 자산관리서비스활성화방안 보험연구원 Ⅰ. 서론 2 경영보고서 2009-02 Ⅱ. 자산관리서비스에대한논리적검토 요약 3 4 경영보고서 2009-02 Ⅲ. 국내외자산관리서비스현황 요약 5 운용전략 운용전략 자산관리서비스유형 유가증권 뮤추얼펀드 상장지수펀드 운용전략 1 운용전략 2 SMA MDA MDA 6 경영보고서 2009-02
경영보고서 2009-2 자산관리서비스활성화방안 보험연구원 Ⅰ. 서론 2 경영보고서 2009-02 Ⅱ. 자산관리서비스에대한논리적검토 요약 3 4 경영보고서 2009-02 Ⅲ. 국내외자산관리서비스현황 요약 5 운용전략 운용전략 자산관리서비스유형 유가증권 뮤추얼펀드 상장지수펀드 운용전략 1 운용전략 2 SMA MDA MDA 6 경영보고서 2009-02
2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업
 2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업 목차 i 목 차 iv 목차 표목차 목차 v vi 목차 목차 vii 그림목차 viii 목차 요 약 요약 1 요 약 제 1 장사업개요및조사방법 4 차세대바이오그린 21 사업사업계획적정성재검토보고서 : * ( 15 ) 요약 5 : 6 차세대바이오그린 21 사업사업계획적정성재검토보고서 요약 7 8
2014 년도사업계획적정성재검토보고서 차세대바이오그린 21 사업 목차 i 목 차 iv 목차 표목차 목차 v vi 목차 목차 vii 그림목차 viii 목차 요 약 요약 1 요 약 제 1 장사업개요및조사방법 4 차세대바이오그린 21 사업사업계획적정성재검토보고서 : * ( 15 ) 요약 5 : 6 차세대바이오그린 21 사업사업계획적정성재검토보고서 요약 7 8
2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관
 2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관 2015 개정교육과정에따른정보과평가기준개발연구 연구협력진 머리말 연구요약 차례 Ⅰ 서론 1 Ⅱ 평가준거성취기준, 평가기준, 성취수준, 예시평가도구개발방향 7 Ⅲ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의개발 25 Ⅳ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의활용방안
2015 개정교육과정에따른정보과평가기준개발연구 연구책임자 공동연구자 연구협력관 2015 개정교육과정에따른정보과평가기준개발연구 연구협력진 머리말 연구요약 차례 Ⅰ 서론 1 Ⅱ 평가준거성취기준, 평가기준, 성취수준, 예시평가도구개발방향 7 Ⅲ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의개발 25 Ⅳ 정보과평가준거성취기준, 평가기준, 성취수준, 예시평가도구의활용방안
 차 례. 서론. 선행연구고찰. 학교생활기록부신뢰도제고를위한설문조사결과. 학교생활기록부신뢰도제고를위한면담조사결과 Ⅴ. 학교생활기록부신뢰도제고를위한개선방안제언 169 Ⅵ. 결론 195 참고문헌 부록 표차례 그림차례 서 론 1 Ⅰ. 서론 Ⅰ. 서론 1. 연구의필요성및목적 3 학교생활기록부신뢰도제고방안연구 4 Ⅰ. 서론 2. 연구의내용및범위 5 학교생활기록부신뢰도제고방안연구
차 례. 서론. 선행연구고찰. 학교생활기록부신뢰도제고를위한설문조사결과. 학교생활기록부신뢰도제고를위한면담조사결과 Ⅴ. 학교생활기록부신뢰도제고를위한개선방안제언 169 Ⅵ. 결론 195 참고문헌 부록 표차례 그림차례 서 론 1 Ⅰ. 서론 Ⅰ. 서론 1. 연구의필요성및목적 3 학교생활기록부신뢰도제고방안연구 4 Ⅰ. 서론 2. 연구의내용및범위 5 학교생활기록부신뢰도제고방안연구
국도_34호선(용궁~개포)건설사업_최종출판본.hwp
건설사업_최종출판본.hwp") 2011 년도타당성재조사보고서 국도 34 호선 ( 용궁 ~ 개포 ) 건설사업타당성재조사 공공투자관리센터 한국개발연구원 요약 Ⅰ. 타당성재조사의개요 1. 사업의배경및목적 4. 34 ~... 2. 사업의추진경위및개요 : 23 2010-10 : ~ : L= 5.0km(4 ) : 764 : 100%() : 2013~2018 (6 ) < 표 1> 총사업비내역 (:
2011 년도타당성재조사보고서 국도 34 호선 ( 용궁 ~ 개포 ) 건설사업타당성재조사 공공투자관리센터 한국개발연구원 요약 Ⅰ. 타당성재조사의개요 1. 사업의배경및목적 4. 34 ~... 2. 사업의추진경위및개요 : 23 2010-10 : ~ : L= 5.0km(4 ) : 764 : 100%() : 2013~2018 (6 ) < 표 1> 총사업비내역 (:
<B3EDB4DC28B1E8BCAEC7F6292E687770>
 1) 초고를읽고소중한조언을주신여러분들게감사드린다. 소중한조언들에도불구하고이글이포함하는오류는전적으로저자개인의것임을밝혀둔다. 2) 대표적인학자가 Asia's Next Giant: South Korea and Late Industrialization, 1990 을저술한 MIT 의 A. Amsden 교수이다. - 1 - - 2 - 3) 계량방법론은회귀분석 (regression)
1) 초고를읽고소중한조언을주신여러분들게감사드린다. 소중한조언들에도불구하고이글이포함하는오류는전적으로저자개인의것임을밝혀둔다. 2) 대표적인학자가 Asia's Next Giant: South Korea and Late Industrialization, 1990 을저술한 MIT 의 A. Amsden 교수이다. - 1 - - 2 - 3) 계량방법론은회귀분석 (regression)
i
 i ii iii iv v vi 요약 요약 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 2 장기존연구검토및연구방향설정 제1절수송분담구조관련지표들제2절수송실적관련자료현황제3절표본조사에근거한수송분담률산정제4절연구방향설정
i ii iii iv v vi 요약 요약 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 1 장과업의개요 제 1 절과업의배경및목적 제 2 절과업의내용및수행방법 제 2 장기존연구검토및연구방향설정 제1절수송분담구조관련지표들제2절수송실적관련자료현황제3절표본조사에근거한수송분담률산정제4절연구방향설정
목 차 Ⅰ. 조사개요 1 1. 조사배경및목적 1 2. 조사내용및방법 2 3. 조사기간 2 4. 조사자 2 5. 기대효과 2 Ⅱ. P2P 대출일반현황 3 1. P2P 대출의개념 3 2. P2P 대출의성장배경 7 3. P2P 대출의장점과위험 8 4. P2P 대출산업최근동향
 조사보회고서 온라인 P2P 대출서비스실태조사 2016. 6. 시장조사국거래조사팀 목 차 Ⅰ. 조사개요 1 1. 조사배경및목적 1 2. 조사내용및방법 2 3. 조사기간 2 4. 조사자 2 5. 기대효과 2 Ⅱ. P2P 대출일반현황 3 1. P2P 대출의개념 3 2. P2P 대출의성장배경 7 3. P2P 대출의장점과위험 8 4. P2P 대출산업최근동향 12 Ⅲ.
조사보회고서 온라인 P2P 대출서비스실태조사 2016. 6. 시장조사국거래조사팀 목 차 Ⅰ. 조사개요 1 1. 조사배경및목적 1 2. 조사내용및방법 2 3. 조사기간 2 4. 조사자 2 5. 기대효과 2 Ⅱ. P2P 대출일반현황 3 1. P2P 대출의개념 3 2. P2P 대출의성장배경 7 3. P2P 대출의장점과위험 8 4. P2P 대출산업최근동향 12 Ⅲ.
120330(00)(1~4).indd
(1~4).indd") 도시개발법시행규칙 [ 별지제 5 호서식 ] 색상이어두운란은가작성하지않습니다. 접수번호 접수일자 성명 ( 법인의명칭및대표자성명 ) 주민등록번호 ( 법인등록번호 ) 전화번호 구역명 동의내용 구역면적 ( m2 ) 사업방식 시행자에관한사항 본인은 도시개발법 제4조제4항및영제6조제6항에따라환지방식의도시개발계획에대하여시행자등에게설명을듣고위내용 ( 개발계획수립과정에서관계기관협의및도시계획위원회의심의결과등에따라개발계획이변경되는경우를포함합니다
도시개발법시행규칙 [ 별지제 5 호서식 ] 색상이어두운란은가작성하지않습니다. 접수번호 접수일자 성명 ( 법인의명칭및대표자성명 ) 주민등록번호 ( 법인등록번호 ) 전화번호 구역명 동의내용 구역면적 ( m2 ) 사업방식 시행자에관한사항 본인은 도시개발법 제4조제4항및영제6조제6항에따라환지방식의도시개발계획에대하여시행자등에게설명을듣고위내용 ( 개발계획수립과정에서관계기관협의및도시계획위원회의심의결과등에따라개발계획이변경되는경우를포함합니다
행정학박사학위논문 목표모호성과조직행태 - 조직몰입, 직무만족, 공직봉사동기에미치는 영향을중심으로 - 년 월 서울대학교대학원 행정학과행정학전공 송성화
 저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
저작자표시 - 비영리 - 변경금지 2.0 대한민국 이용자는아래의조건을따르는경우에한하여자유롭게 이저작물을복제, 배포, 전송, 전시, 공연및방송할수있습니다. 다음과같은조건을따라야합니다 : 저작자표시. 귀하는원저작자를표시하여야합니다. 비영리. 귀하는이저작물을영리목적으로이용할수없습니다. 변경금지. 귀하는이저작물을개작, 변형또는가공할수없습니다. 귀하는, 이저작물의재이용이나배포의경우,
G lobal M arket Report 유럽재정위기 2 년, 주요국변화동향
 G lobal M arket Report 12-012 2012.06.14 유럽재정위기 2 년, 주요국변화동향 C O N T E N T S 목 차 1. EU 총괄 / 2. 그리스 / 3. 독일 / 4. 스페인 / 5. 영국 / 5. 이탈리아 / 5. 프랑스 / 유럽재정위기 2 년, 주요국변화동향 요약 4 Global Market Report 12-012 5 Global
G lobal M arket Report 12-012 2012.06.14 유럽재정위기 2 년, 주요국변화동향 C O N T E N T S 목 차 1. EU 총괄 / 2. 그리스 / 3. 독일 / 4. 스페인 / 5. 영국 / 5. 이탈리아 / 5. 프랑스 / 유럽재정위기 2 년, 주요국변화동향 요약 4 Global Market Report 12-012 5 Global
Untitled-1
 영역별 욕구조사 설문지 예시 자료 3 장애인영역 평택시 사회복지시설 욕구조사 실무도움서 _ 201 202 _ 평택복지재단 영역별 욕구조사 설문지 예시 자료 2 3 2 3 평택시 사회복지시설 욕구조사 실무도움서 _ 203 204 _ 평택복지재단 영역별 욕구조사 설문지 예시 자료 2 3 4 평택시 사회복지시설 욕구조사 실무도움서 _ 205 2 3 4 5 6 7
영역별 욕구조사 설문지 예시 자료 3 장애인영역 평택시 사회복지시설 욕구조사 실무도움서 _ 201 202 _ 평택복지재단 영역별 욕구조사 설문지 예시 자료 2 3 2 3 평택시 사회복지시설 욕구조사 실무도움서 _ 203 204 _ 평택복지재단 영역별 욕구조사 설문지 예시 자료 2 3 4 평택시 사회복지시설 욕구조사 실무도움서 _ 205 2 3 4 5 6 7
ad-200400012.hwp
 제17대 총선과 남녀유권자의 정치의식 및 투표행태에 관한 연구 - 여성후보 출마 선거구 조사를 중심으로 - 2004. 7 여 성 부 제17대 총선과 남녀유권자의 정치의식 및 투표행태에 관한 연구 - 여성후보 출마 선거구 조사를 중심으로 - 2004. 7 여 성 부 연구요약 표 주제 및 연도별 여성유권자 연구 현황 표 출마한 여성후보 인지시기 투표후보여성
제17대 총선과 남녀유권자의 정치의식 및 투표행태에 관한 연구 - 여성후보 출마 선거구 조사를 중심으로 - 2004. 7 여 성 부 제17대 총선과 남녀유권자의 정치의식 및 투표행태에 관한 연구 - 여성후보 출마 선거구 조사를 중심으로 - 2004. 7 여 성 부 연구요약 표 주제 및 연도별 여성유권자 연구 현황 표 출마한 여성후보 인지시기 투표후보여성
Àç°¡ »êÀçÀå¾ÖÀÎÀÇ ÀçÈ°ÇÁ·Î±×·¥¿¡ °üÇÑ¿¬±¸.HWP
 재가산재장애인의재활프로그램에관한연구 (Ⅰ) - 산재보험사후관리실태및개선방안 - 한국노동연구원 재가산재장애인의재활프로그램에관한연구 (Ⅰ) i 재가산재장애인의재활프로그램에관한연구 (Ⅰ) ii 재가산재장애인의재활프로그램에관한연구 (Ⅰ) iii 재가산재장애인의재활프로그램에관한연구 (Ⅰ) iv 재가산재장애인의재활프로그램에관한연구 (Ⅰ) v 재가산재장애인의재활프로그램에관한연구
재가산재장애인의재활프로그램에관한연구 (Ⅰ) - 산재보험사후관리실태및개선방안 - 한국노동연구원 재가산재장애인의재활프로그램에관한연구 (Ⅰ) i 재가산재장애인의재활프로그램에관한연구 (Ⅰ) ii 재가산재장애인의재활프로그램에관한연구 (Ⅰ) iii 재가산재장애인의재활프로그램에관한연구 (Ⅰ) iv 재가산재장애인의재활프로그램에관한연구 (Ⅰ) v 재가산재장애인의재활프로그램에관한연구
<C3E6B3B2B1B3C0B0313832C8A32DC5BEC0E7BFEB28C0DBB0D4292D332E706466>
 11-8140242-000001-08 2013-927 2013 182 2013 182 Contents 02 16 08 10 12 18 53 25 32 63 Summer 2 0 1 3 68 40 51 57 65 72 81 90 97 103 109 94 116 123 130 140 144 148 118 154 158 163 1 2 3 4 5 8 SUMMER
11-8140242-000001-08 2013-927 2013 182 2013 182 Contents 02 16 08 10 12 18 53 25 32 63 Summer 2 0 1 3 68 40 51 57 65 72 81 90 97 103 109 94 116 123 130 140 144 148 118 154 158 163 1 2 3 4 5 8 SUMMER
2002report hwp
 2002 연구보고서 240-13 이혼여성의부모역할및자녀양육지원방안에관한연구 한국여성개발원 발간사 연구요약 1. 연구의필요성및목적 2. 연구내용및방법 가. 연구내용 나. 연구방법 3. 연구결과 (1) 설문조사결과 (2) 심층면접조사결과 4. 이혼여성의부모역할과자녀양육지원을위한정책과제 가. 기본방향 나. 정책과제 목 차 발간사 연구요약 Ⅰ 서론
2002 연구보고서 240-13 이혼여성의부모역할및자녀양육지원방안에관한연구 한국여성개발원 발간사 연구요약 1. 연구의필요성및목적 2. 연구내용및방법 가. 연구내용 나. 연구방법 3. 연구결과 (1) 설문조사결과 (2) 심층면접조사결과 4. 이혼여성의부모역할과자녀양육지원을위한정책과제 가. 기본방향 나. 정책과제 목 차 발간사 연구요약 Ⅰ 서론
태양광산업 경쟁력조사.hwp
 태양광산업산업경쟁력조사 1 Ⅰ. 1. 52 2. 53 Ⅱ. 1. 54 2. 60 3. 64 III. 1. 71 2. 82 Ⅳ. 1. 98 2. 121 3. 132 Ⅴ. 1. 147 2. 160 3. 169 4. SWOT 181 Ⅵ. 1. 187 2. 202 3. 217 Ⅶ. 225 < 요약 > Ⅰ. 서론 II. 태양광산업의개요 III. 태양광기술개발현황
태양광산업산업경쟁력조사 1 Ⅰ. 1. 52 2. 53 Ⅱ. 1. 54 2. 60 3. 64 III. 1. 71 2. 82 Ⅳ. 1. 98 2. 121 3. 132 Ⅴ. 1. 147 2. 160 3. 169 4. SWOT 181 Ⅵ. 1. 187 2. 202 3. 217 Ⅶ. 225 < 요약 > Ⅰ. 서론 II. 태양광산업의개요 III. 태양광기술개발현황
- 2 -
 - 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
- 2 - - 3 - - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - 가 ) 가 ) 가 ) 가 ) - 10 - - 11 - 길이 피시험기기 주전원 절연지지물 케이블지지용절연물 접지면 발생기 - 12 - 길이 가능한경우 절연지지물 절연지지물 접지면 전자계클램프 감결합장치 - 13 - - 14 - - 15 - - 16 - - 17 - - 18 -
1111111111.PDF
 표지와 같은 면지 19대 총선평가 학술회의 일 시: 2012년 4월 25일(수) 13:30 18:00 장 소: 국회입법조사처 대회의실 (국회도서관 421호), 제1세미나실 (427호) 주 최: 국회입법조사처/한국정당학회 전체일정표 대회의실 제1세미나실 1:30 ~ 1:50 pm 개회식 1:50 ~ 3:50 pm 1패널 19대 총선평가와 전망 3:50 ~ 4:00
표지와 같은 면지 19대 총선평가 학술회의 일 시: 2012년 4월 25일(수) 13:30 18:00 장 소: 국회입법조사처 대회의실 (국회도서관 421호), 제1세미나실 (427호) 주 최: 국회입법조사처/한국정당학회 전체일정표 대회의실 제1세미나실 1:30 ~ 1:50 pm 개회식 1:50 ~ 3:50 pm 1패널 19대 총선평가와 전망 3:50 ~ 4:00
조사보고서 구조화금융관점에서본금융위기 분석및시사점
 조사보고서 2009-8 구조화금융관점에서본금융위기 분석및시사점 Ⅰ. 서론 Ⅱ. 구조화금융의미시적시장구조 2 조사보고서 2009-08 요약 3 Ⅲ. 서브프라임위기의현황과분석 4 조사보고서 2009-08 Ⅳ. 서브프라임위기의원인및특징 요약 5 6 조사보고서 2009-08 Ⅴ. 금융위기의파급경로 Ⅵ. 금융위기극복을위한정책대응 요약 7 8 조사보고서 2009-08
조사보고서 2009-8 구조화금융관점에서본금융위기 분석및시사점 Ⅰ. 서론 Ⅱ. 구조화금융의미시적시장구조 2 조사보고서 2009-08 요약 3 Ⅲ. 서브프라임위기의현황과분석 4 조사보고서 2009-08 Ⅳ. 서브프라임위기의원인및특징 요약 5 6 조사보고서 2009-08 Ⅴ. 금융위기의파급경로 Ⅵ. 금융위기극복을위한정책대응 요약 7 8 조사보고서 2009-08
Microsoft Word - 4장_처짐각법.doc
 동아대학교토목공학과구조역학 4. 처짐각법 변위법 (Slope Deflection ethod Displacement ethod) Objective of this chapter: 처짐각법의기본개념. What will be presented: 처짐각법을이용한다차부정정보해석 처짐각법을이용한다차부정정골조해석 Theoretical background 미국미네소타대학의
동아대학교토목공학과구조역학 4. 처짐각법 변위법 (Slope Deflection ethod Displacement ethod) Objective of this chapter: 처짐각법의기본개념. What will be presented: 처짐각법을이용한다차부정정보해석 처짐각법을이용한다차부정정골조해석 Theoretical background 미국미네소타대학의
2002report220-10.hwp
 2002 연구보고서 220-10 대학평생교육원의 운영 방안 한국여성개발원 발 간 사 연구요약 Ⅰ. 연구목적 Ⅱ. 대학평생교육원의 변화 및 외국의 성인지적 접근 Ⅲ. 대학평생교육원의 성 분석틀 Ⅳ. 국내 대학평생교육원 현황 및 프로그램 분석 Ⅴ. 조사결과 Ⅵ. 결론 및 정책 제언 1. 결론 2. 대학평생교육원의 성인지적 운영을 위한 정책 및 전략 목
2002 연구보고서 220-10 대학평생교육원의 운영 방안 한국여성개발원 발 간 사 연구요약 Ⅰ. 연구목적 Ⅱ. 대학평생교육원의 변화 및 외국의 성인지적 접근 Ⅲ. 대학평생교육원의 성 분석틀 Ⅳ. 국내 대학평생교육원 현황 및 프로그램 분석 Ⅴ. 조사결과 Ⅵ. 결론 및 정책 제언 1. 결론 2. 대학평생교육원의 성인지적 운영을 위한 정책 및 전략 목
3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 -
 안양시도로조명시설설치및관리에관한조례안 1. 제정이유 2. 주요내용 - 1 - 3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 - 안양시도로조명시설설치및관리에관한조례안 - 3 - ➃ - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 별표 1 도로및교통의종류에따른도로조명등급 ( 제 6 조관련 ),,.,,,,,
안양시도로조명시설설치및관리에관한조례안 1. 제정이유 2. 주요내용 - 1 - 3. 제정조례안 : 붙임 4. 예산수반사항 : 없음 5. 관계법령발췌서 : 붙임 - 2 - 안양시도로조명시설설치및관리에관한조례안 - 3 - ➃ - 4 - - 5 - - 6 - - 7 - - 8 - - 9 - - 10 - 별표 1 도로및교통의종류에따른도로조명등급 ( 제 6 조관련 ),,.,,,,,
1-표지 및 목차 & 1-서론 (최종보고서안).hwp
.hwp") 목차 표목차 그림목차 1 제 1 장서론 하수도시설내진기준마련을위한연구 1.1 1.2 1.3 제 1 장서론 하수도시설내진기준마련을위한연구 2 제 2 장 국내외주요지진발생현황 및피해사례조사 분석 하수도시설내진기준마련을위한연주 2.1 서론 2.2 국내지진발생현황및발생빈도 2.3 국외주요지진과하수도시설피해상황 제 2 장국내외주요지진발생현황및피해사례조사
목차 표목차 그림목차 1 제 1 장서론 하수도시설내진기준마련을위한연구 1.1 1.2 1.3 제 1 장서론 하수도시설내진기준마련을위한연구 2 제 2 장 국내외주요지진발생현황 및피해사례조사 분석 하수도시설내진기준마련을위한연주 2.1 서론 2.2 국내지진발생현황및발생빈도 2.3 국외주요지진과하수도시설피해상황 제 2 장국내외주요지진발생현황및피해사례조사
목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ]
![목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ]](/thumbs/86/93192900.jpg "목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ]") 우리는소비자와함께행복한세상을만든다 건전지품질비교시험결과보고서 2012. 8 시험분석국 기계전기팀 목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ] 1. 10 2. 24 3. 25 I 시험개요 1. 시험배경및목적 - 1 - 2. 시험대상 () ( ) 1 [4 ] Zhejiang Mustang Battery
우리는소비자와함께행복한세상을만든다 건전지품질비교시험결과보고서 2012. 8 시험분석국 기계전기팀 목차 Ⅰ 시험개요 1 Ⅱ 건전지품질비교시험결과요약 4 Ⅲ 건전지종합평가표 8 Ⅳ 시험결과조치계획 9 [ ] 1. 10 2. 24 3. 25 I 시험개요 1. 시험배경및목적 - 1 - 2. 시험대상 () ( ) 1 [4 ] Zhejiang Mustang Battery
농업기반정비사업 계획설계기준 개편
 발간등록번호 11-1543000-000714-01 http://rri.ekr.or.kr Reforms of Code Structure for the Agricultural Infrastructure Design Standards (Ⅰ) - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - -
발간등록번호 11-1543000-000714-01 http://rri.ekr.or.kr Reforms of Code Structure for the Agricultural Infrastructure Design Standards (Ⅰ) - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - -
....(......)(1)
(1)") Finance Lecture Note Series 창업설계(캡스톤디자인)(1) 제1강. 강의소개 조 승 모1 영남대학교 경제금융학부 2015학년도 2학기 Copyright 2015 Cho, Seung Mo 1 영남대학교 상경대학 경제금융학부 조교수; (우) 712-749 경상북도 경산시 대학로 280 영남대학교 상경관 224호; choseungmo@yu.ac.kr;
Finance Lecture Note Series 창업설계(캡스톤디자인)(1) 제1강. 강의소개 조 승 모1 영남대학교 경제금융학부 2015학년도 2학기 Copyright 2015 Cho, Seung Mo 1 영남대학교 상경대학 경제금융학부 조교수; (우) 712-749 경상북도 경산시 대학로 280 영남대학교 상경관 224호; choseungmo@yu.ac.kr;
<B8D3B8AEB8BB5F20B8F1C2F72E687770>
 발간사 발간사 KDI 정책연구사례 : 지난 30 년의회고 발간사 KDI 정책연구사례 : 지난 30 년의회고 목차 / 김광석 / 김적교 / 사공일 / 송희연 / 남상우 / 문팔용 / 김윤형 / 사공일ㆍ송대희 / 김수곤 / 김영봉 / 이규억 / 민재성ㆍ박재용 KDI 정책연구사례 : 지난 30 년의회고 / 황인정 / 남상우 / 양수길 / 고일동 / 김준경ㆍ조동철
발간사 발간사 KDI 정책연구사례 : 지난 30 년의회고 발간사 KDI 정책연구사례 : 지난 30 년의회고 목차 / 김광석 / 김적교 / 사공일 / 송희연 / 남상우 / 문팔용 / 김윤형 / 사공일ㆍ송대희 / 김수곤 / 김영봉 / 이규억 / 민재성ㆍ박재용 KDI 정책연구사례 : 지난 30 년의회고 / 황인정 / 남상우 / 양수길 / 고일동 / 김준경ㆍ조동철
2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예
 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예") 2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예 Homework #2 [2] 답의예 ( 학생 1): 소폭수정 다양한외부환경을효과적으로검지할수있는센서기술은검지변환, 신호처리및지능화기술등융합 적특성을갖고있음. 현재대부분실용화중심의연구가주류를이루고있으며,
2017 년 1 학기 공학논문작성법 (3 강 ) 공학논문작성방법개요 좋은공학논문작성을위해서는무엇이필요한가? (1) 논리적이고정확하게글쓰기 (2강내용에연결 ) (2) Abstract 작성법의예 Homework #2 [2] 답의예 ( 학생 1): 소폭수정 다양한외부환경을효과적으로검지할수있는센서기술은검지변환, 신호처리및지능화기술등융합 적특성을갖고있음. 현재대부분실용화중심의연구가주류를이루고있으며,
01-02Àå_»ç·ÊÁýb74öÁ¤š
 C O N T E N T S 7 13 35 44 44 62 65 76 92 121 131 138 151 163 174 180 185 193 199 204 206 209 228 256 287 296 318 321 322 344 348 354 357 359 364 367 399 410 428 446 투명한 법, 공정사회로! 2010 부패영향평가 사례집 부패영향평가는
C O N T E N T S 7 13 35 44 44 62 65 76 92 121 131 138 151 163 174 180 185 193 199 204 206 209 228 256 287 296 318 321 322 344 348 354 357 359 364 367 399 410 428 446 투명한 법, 공정사회로! 2010 부패영향평가 사례집 부패영향평가는
- 2 -
 보도자료 미래부 - 부산시, 아시아디지털방송아카데미 ( 가칭 ) 설립공동협력키로 - 부산콘텐츠마켓 과함께아시아공동체의방송발전에크게기여할것 - - 1 - - 2 - - 3 - [ 붙임 1] 아시아디지털방송아카데미설립 MOU 체결 ( 안 ) ㆍ 2 7 6 10 5-4 - 참고 1 상호협력양해각서 (MOU) ( 안 ) 아시아디지털방송아카데미설립 운영을위한 상호협력양해각서
보도자료 미래부 - 부산시, 아시아디지털방송아카데미 ( 가칭 ) 설립공동협력키로 - 부산콘텐츠마켓 과함께아시아공동체의방송발전에크게기여할것 - - 1 - - 2 - - 3 - [ 붙임 1] 아시아디지털방송아카데미설립 MOU 체결 ( 안 ) ㆍ 2 7 6 10 5-4 - 참고 1 상호협력양해각서 (MOU) ( 안 ) 아시아디지털방송아카데미설립 운영을위한 상호협력양해각서
< C0DAC0B2C5BDB1B820BFEEBFB520B8DEB4BABEF32D33C2F720C6EDC1FD2E687770>
 과학영재의창의적탐구능력배양을위한 R&E 프로그램기획 운영핸드북 Handbook of Annual Planning and Implementing R&E Program for the Talented 2017 과학영재창의연구 (R&E) 지원센터 이핸드북은과학고와과학영재학교의연간 R&E 프로그램기획 운영을효과적으로지원하기위해개발된것으로, 한국과학창의재단지정과학영재창의연구
과학영재의창의적탐구능력배양을위한 R&E 프로그램기획 운영핸드북 Handbook of Annual Planning and Implementing R&E Program for the Talented 2017 과학영재창의연구 (R&E) 지원센터 이핸드북은과학고와과학영재학교의연간 R&E 프로그램기획 운영을효과적으로지원하기위해개발된것으로, 한국과학창의재단지정과학영재창의연구
2002report hwp
 2002 연구보고서 220-11 초 중등교육과정의성인지적개편을위한양성평등교육내용개발 한국여성개발원 발간사 양성평등교육내용개발진 연구요약 1. 연구목적 2. 연구방법 3. 7 차교육과정및교과서내용분석 가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 4. 각교과별양성평등교육내용개발가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 5. 결론 목 차 Ⅰ 서론
2002 연구보고서 220-11 초 중등교육과정의성인지적개편을위한양성평등교육내용개발 한국여성개발원 발간사 양성평등교육내용개발진 연구요약 1. 연구목적 2. 연구방법 3. 7 차교육과정및교과서내용분석 가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 4. 각교과별양성평등교육내용개발가. 도덕과 나. 사회과 다. 실과 / 기술 가정과 5. 결론 목 차 Ⅰ 서론
C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 개관 완성차브랜드현황 협력업체 ( 부
 Global Market Report 17-039 Global Market Report 태국자동차산업글로벌밸류체인 (GVC) 진출방안 방콕무역관 C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 13 3. 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 16 1. 개관
Global Market Report 17-039 Global Market Report 태국자동차산업글로벌밸류체인 (GVC) 진출방안 방콕무역관 C O N T E N T S 목 차 요약 / 1 Ⅰ. 태국자동차산업현황 2 1. 개관 5 2. 태국자동차생산 판매 수출입현황 13 3. 우리나라의대태국자동차 부품수출현황 Ⅱ. 태국자동차산업밸류체인현황 16 1. 개관
viii 본 연구는 이러한 사회변동에 따른 고등직업교육기관으로서 전문대 학의 역할 변화와 지원 정책 및 기능 변화를 살펴보고, 새로운 수요와 요구에 대응하기 위한 전략으로 전문대학의 기능 확충 방안을 모색하 였다. 연구의 주요 방법과 절차 첫째, 기존 선행 연구 검토
 vii 요 약 연구의 필요성 및 목적 우리 사회는 끊임없이 변화를 겪으며 진화하고 있다. 이러한 사회변 동은 정책에 영향을 미치게 되고, 정책은 기존의 정책 방향과 내용을 유지 변화시키면서 정책을 계승 완료하게 된다. 이러한 정책 변화 는 우리 사회를 구성하는 다양한 집단과 조직, 그리고 우리의 일상에 긍정적으로나 부정적으로 영향을 주게 된다. 이러한 차원에서
vii 요 약 연구의 필요성 및 목적 우리 사회는 끊임없이 변화를 겪으며 진화하고 있다. 이러한 사회변 동은 정책에 영향을 미치게 되고, 정책은 기존의 정책 방향과 내용을 유지 변화시키면서 정책을 계승 완료하게 된다. 이러한 정책 변화 는 우리 사회를 구성하는 다양한 집단과 조직, 그리고 우리의 일상에 긍정적으로나 부정적으로 영향을 주게 된다. 이러한 차원에서
그린홈이용실태및만족도조사
 2009 년도연구용역보고서 그린홈이용실태및 만족도설문조사 - 2009. 11. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 이화여자대학교소비자학과교수정순희 그린홈이용실태및만족도 설문조사 2009. 11. 책임연구원 정순희 ( 이화여자대학교소비자학과교수
2009 년도연구용역보고서 그린홈이용실태및 만족도설문조사 - 2009. 11. - 이연구는국회예산정책처의연구용역사업으로수행된것으로서, 보고서의내용은연구용역사업을수행한연구자의개인의견이며, 국회예산정책처의공식견해가아님을알려드립니다. 책임연구원 이화여자대학교소비자학과교수정순희 그린홈이용실태및만족도 설문조사 2009. 11. 책임연구원 정순희 ( 이화여자대학교소비자학과교수
PowerPoint 프레젠테이션
 03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
03 모델변환과시점변환 01 기하변환 02 계층구조 Modeling 03 Camera 시점변환 기하변환 (Geometric Transformation) 1. 이동 (Translation) 2. 회전 (Rotation) 3. 크기조절 (Scale) 4. 전단 (Shear) 5. 복합변환 6. 반사변환 7. 구조변형변환 2 기하변환 (Geometric Transformation)
차세대창의발명교육모델구축연구 특허청 한국발명진흥회
 표지 차세대창의발명교육모델구축연구 2010. 12. 특허청 한국발명진흥회 차세대창의발명교육모델구축연구 2010. 12. 특허청 한국발명진흥회 차세대창의발명교육모델구축연구 - i - - ii - - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - - xii - - xiii - 차세대창의발명교육모델구축연구
표지 차세대창의발명교육모델구축연구 2010. 12. 특허청 한국발명진흥회 차세대창의발명교육모델구축연구 2010. 12. 특허청 한국발명진흥회 차세대창의발명교육모델구축연구 - i - - ii - - iii - - iv - - v - - vi - - vii - - viii - - ix - - x - - xi - - xii - - xiii - 차세대창의발명교육모델구축연구